':
-
··~V~- -~ ~ C)
·'
)
ELEMENTOS DE
BARRETT O'NEILL
DEPARTAMENTO DE MATEMATICAS
UNIVERSIDAD DE CALIFORNIA,
LOS ANGELES, CALIFORJ\'IA
'f:rí·<·.
DITORIAL
EX 1CO
LI~USA-WILEV,
S. A.
1971
Titulo de la obra en ir.g!és:
ELEMEXTARY DIFFERENTL\L Gco~IETRY
Copyright © 1966 by Academic Press, Inc.
Versión española:
RICARDO
Vl~OS
DR. GCILLER¡..fO TORRES DL\Z
Profes"r Tit'.tlar de Matemáticas e
Investi~c~aclor del Instituto ele :.fatcmáticas
de la I'<~ctdtad ck Ci~ncias ele la
Universidad Nacinnal :\utén1mna de ~léxico
Derechns reservad"" en lengua csp:n'íola
©
1972, EDITORL\L L~MCSA-WILEY. S. :\.
Arcos de Belcm I\'úm. 75. !\léxico 1, D. F.
Miembro de la Cámara. Nacional de la
Industria Editorial. Registro Núm. 121
Primera edición: 1972
Impreso en México
[566]
~
Prólogo
~··,
~
"- ·--· ¡.....)
-~
,.
Este libro expone los elementos de la geometría de curvas y superficies.
Se destina para los estudiantes que ya terminaron los primeros cursos regulares de cálculo y álgebra lineal y se escribió, con el propósito de presentar
una introducción a las ideas más importantes de la geometría diferencial.
En las últimas décadas, el curso tradicional de geometría diferencial para
estudiantes ha cambiado muy poco. Por otra parte, en la investigación,
la geometría ha progresado con mucha rapidez y se reconoce generalmente
que es necesario modernizar el curso- a nivel de licenciatura. Traté de
revisar el material clásico, para eliminar las partes superfluas, a la vez,
que aumentarlo y presentar mi versión en un estilo matemático bastante
pulcro y moderno. Sin cmb:ugo, me abstuye de emplear ideas nuevas,
excepto, cuando ayudaban a esclarecer y simplificar la exposición.
En el capítulo 1 se establece la terminología del libro; es un lenguaje
que ya conocen parcialmente quienes estudiaron el cálculo y álgebra
lineal. En el capítulo 11, se describe el método de los "sistemas móviles de
referencia" que se expone aquí, igual que en el cálculo elemental, a fin
ele estudiar cun·as en el espacio. En el capítulo III, im-cstigamos los movimientos rígidos del espacio que permiten definir la congruencia de curvas
(o de superficies_: en el espacio, de la misma manera que la congruencia
de triángulos en el pl;mo.
Se requiere un comentario especial acerca del capítulo IV. La deficiencia principal de la g¡·ometría diferencial clásica residía en la falta de
una definición aclccuacla ele superficie. En este capítulo decidiremos lo que
es, en verdad. una snperficic y clerno;;trarcmos que a cada superficie le
corresponde un cálculo diferencial e integral propio de ella y totalmente
análogo al bien conocido cúlndo del plano. En esta exposición se presenta
por primera vez la idea de z·m iedad diferenciable la cual llegó a ser imprescindible en aquclLts ramas, ele las matemáticas y sus aplicaciones, que
se basan en el cálr-ulo.
Los dos cZlpÍtulos siguientes abarcan la gcometrb ele las superficies
en el espacio tridimensional. El capítulo V subraya los aspectos intuitivos
y ele c;'dculo. <1 fin de cLnlc un ,,cnticlo geométrico a la teoría del capítulo VI.
En el {¡ ltimo c;tpítulo, no rnodificamm mvcstros métodos, pt-ro adoptamos
6
PRÓL0GO
un punto de vista radicalmente opuesto. En términos generales, lo que
hacemos allí es estudiar la geometría de una superficie, tal como la verían
sus habitantes, sin suponer que la superficie en cuestión se encuentra en el
espacio tridimensional ordinario.
Ninguna ram::t de las matemáticas estimula más la intuici(m que la
geometría. Traté de destacarlo, proporcionando gran número de ejemplos
que forman parte integral del texto. Al final ele cada se.cción, hay un
conjunto de ejercicios; éstos van, desde las pruebas rutinarias de comprensión hasta problemas que requieren mayor esfuerzo intelectual.
Al usar, para dar clases, las versiones preliminares del libro, por lo
general, cubría, con bastante rapidez, el material preliminar del capítulo I
y omitía el capítulo III (así como, lógicamente, la sección 8 del capítulo VI). Un curso de la geometría de las curvas y las superficies en el
espacio podría constar de: el capítulo II, el capítulo IV (con la omisión
de las secciones 6 y 8), el capítulo V y el capítulo VI (con la omisión de
las secciones 6 y 7). Si a estos capítulos agregarnos la explicación de los
conceptos de superficie y de mapeo de superficies, esto será, en esencia, el
material del curso tradicional ele geometría diferencial para estudiantes.
Las seciones que omitimos, en la lista anterior, se usan solamente en
el capítulo VII. La presentación ele este capítulo final, con su estudio
amplio de la geometría bidimensional ele Riemann, en cierto sentido, es
el objr~tivo principal ele este libro. En lugar ele desplazar el estudio a dimensiones superiores, he preft'rido conseryar la dimensión 2, para que
este punto de vista de la g·pometría más sutil. se desarrolle directamente a
partir del caso especial de las superficies del espacio ele dimensión 3. El
capítulo VII es largo y, en la primera lectura, se pueden omitir el teorema 5.9 y las secciones 6 y 7. En los primeros capítulos se ha evitado aplicar
a fondo la teoría de ecuaciones diferenciales; sin embargo, será útil conocer
los fundamentos de la misma para estudiar el capítulo VII.
BARRETT O'NEILL
Los An¡;eles, California
Capítulo l.
13
El cálculo en el espacio euclidiano,
13
16
Derivadas direccionales, 21
Curvas en E". 26
1 - formas, 33
Formas diferenciales, 38
:rvfapeos, 41
Resumen, 53
l. El espacio euclidiano,
2. Vectores tan gen tes,
3.
4.
5.
6.
7.
8.
Capítulo 11.
l.
2.
3.
4.
5.
6.
7.
8.
9.
Capítu!o 111.
El producto escalar, 5:)
Curvas, 64
Las fórmulas ele Frenet, 71
Curvas ele rapidez arbitraria, 81
Derivadas covariantes, 94
Campos ele sistemas ele referencia, 98
Formas ele conexión, 102
Las ecuaciones estructurales, 110
Resumen, 115
117
Geometría euclidiana,
l.
2.
3.
4.
:).
6.
Capítulo IV.
55
Campos de sistemas de referencia
Isometrías ele E", 117
El mapa ele cleriY;cdas de una isomctría,
Orientación, 127
Geometría euclidiana, 133
Congruencia de e urvas, 138
Resumen, 146
El cálculo en una superficie,
l. Las superficies en E\ 14f)
2. Los cálculos en las cartas, Lif)
.
7
124
149
8
CONTENIDO
3.
4.
5.
6.
7.
8.
9.
Capítulo V.
Operadores de forma,
l.
2.
3.
4.
5.
6.
7.
Capítulo VI.
219
El operador de forma de 1vi e E 3 , 219
Curvatura normal, 226
Curvatura gaussiana, 234
Técnicas de cálculo, 242
Curvas especiales en una superficie, 257
Superficies de revolución, 269
Resumen, 280
:.>.
6.
7.
8.
9.
Las ecuaciones fundamentales, 281
Cálculos con formas, 287
Algunos teoremas globales, 294
Isometrías e isometrías locales, 302
La geometría intrínseca de superficie de E'',
Coordenadas ortogonales, 316
Intt>gración y orientación. 321
Congruencia de superficies, 34D
Resumen, 347
La geometría de Riemann,
l.
2.
3.
4.
5.
6.
7.
B.
9.
1
1
Geometría de las superficies en E 3 ,
l.
2.
3.
4.
Capítulo VIl.
Funciones diferenciables y vectores tangentes, 169
Formas diferenciales en una superficie, 178
Mapeos de superficies, 185
Integración de formas, 194
Propiedades topológicas de las superficies, 204
Variedades, 21 O
Resumen, 217
281
311
349
Supnficics geométricas, 349
La curTatura gaussiana, 356
La derivada covariante, 364
Las geodésicas, 37·1:
Propiedades minimizantes de la longitud
de las geodésicas, 389
Curvatura y puntos conjugados, 404
\!apeos que conservan los productos
interiores, 415
El teorema de Gauss-Bonnet, 426
Resumen, 445
a
.
Bibliografía,
447
Respuestas a los ejercicios impares,
449
lndice,
463
. /·. ¡'
¡L
!',.
',
..
.'
f•'•
()L¡;.,y
~.Tnlrod.ucci ó n
.~
-/. --,.--e-........,
_ _\ 1
--~-
Para estudiar este libro se necesitan algunos conocimientos de cálculo y
álgebra lineal elementales. Lo que hace falta es saber cómo funcionan los
fundamentos. Por ejemplo, el lector deberá hacer uso con frecuencia ele b
regla de la cadena para derivar, pero su demostración nos tiene sm
cuidado.
El cálculo estudia sobre todo funciones ele valores reales ele una o más
variables, y el álgebra lineal, funciones (transformaciones lineales) ele un
espacio vectorial a otro. Nccesitan:mos funciones ele éstas y ele otras clases,
ele manera que daremos definiciones generales que abarquen a todas.
Un conjunto S es una colección ele objetos que se llam:m elementos de
S. Un conjunto A es subconjunto ele S siemprE' que cada elemento ele A
sea también elemento ele S.
Una función f ele un conjunto D a otro conjunto R es una regla que
asigna a cada elemento x en D un elemento único f(.\·) de R. El elemento
f(x) se llama valor ele f en x. El conjunto D se llama dominio ele f; el
conjunto R se suele llamar contradominio de f. Si queremos hacer notar
el dominio y el contradominio de una función f, empleamos la notación
f: D ~ R. Adviértase que denotamos la función por una sola letra, por
ejemplo, f, mientras que f (x) es solamente uno de los valores de f.
Se usan muchos términos para designar las funciones: mapeos, transformaciones, correspondencias, operadores, entre otros. Se puede describir
una función de diversas maneras, y el caso más simple es una fórmula
explícita, como la de
f(x) = 3x2
+
1,
que también podríamos escribir como x ~ 3x 2 + l.
Si tanto f 1 y f 2 'on funciones de D en R, entonces [t = f 2 significa que
f 1 ( x) = fe (x) para toda x en D. Esto no es una definición, smo consecuencia lógica de la definición de función.
Sean las funciones f: D ~ R y g: E~ S. En general, se dice que la
imagen de f es el subconjunto ele R compuesto ele todos los elementos
de la forma f (x) ; se le suele denotar por f (D) . Ahora bien, si esta imagen
también resulta ser subconjunto ?el dominio E de g, será posible combinar
9
10
INTRODUCCIÓN
las dos funciones para obtener la función compuesta g(f): D--'-> S. Por
definición, g(f) es la función cuyo valor en cada elemento x de D es el
elemento g(f(x)) de S.
Si f: D--'-> R es una función y si A es subconjunto de D, entonces, b
restricción de 1 a A es la función 1 1 A: A-> R definida por la misma regla
que f, pero aplicada solamente a los elementos ele A. Este cambio es
aparentemente menor, pero la función f 1 A puede tener propiedades muy
diferentes ele las ele la misma f.
He aquí dos propiedades importantes que una función puede tener.
Se dice que una función f: D--'-> R es uno a uno siempre que, si x y y son
elementos ele D tales que x =/=y, entonces f(x) =!= f(y). Una función
f: D ~ R es sobre (o lleva a D sobre R) siempre que, para cada elemento
y de R, haya por lo menos un elemento x en D tal que f(x) =y. Con
brevedad, decimos que la imagPn de f es la totaliclacl del conjunto R. Por
ejemplo, considérense las funciones siguientes, c::lda una de las cuales tiene
el conjunto ele los números reales de dominio y de contradominio:
1. La función
2. La función
sobre.
3. La función
4. La función
x ~ x 3 que es uno a uno al mismo tiempo que es sobre.
eJSponencial x ~ ex, que es uno a uno, aunque no es
x ~ x 3 + xe, que es sobre, pero no es uno a uno.
seno, x ~ sen x, que no es ni uno a uno ni sobre.
Si una función f: D ~ R es uno a uno y sobre, entonces, para cada
elemento y de R hay uno, y sólo uno, elemento x tal que f(x) =y. Al
definir f _,(y) = x para toda x y toda y relacionadas de esa manera, obtenemos una función j- 1 : R ~ D que se llama inversa de f. Adviértase que
la función j- 1 es también uno a uno y sobre, y que su función inversa es la
función original f.
He aquí una lista breve de las notaciones principales que emplearemos
a lo largo del libro, en el orden de su aparición en el capítulo I:
p, q, ................... .
f, [[, ..
v,
o
•••••••••••••••••
"\V, . . . • • . . . . . . . . . . . • . . .
V, W, .. ............... .
a, (3, . .................. .
'
1 ................... .
<p,
y,
F, G, .................. .
(sección 1)
puntos
funciones de valores reales (sección 1)
(sección 2)
vectores tangentes
(sección 2)
campos Ycctoriales
CUlTaS
(sección 4)
formas diferenciales
(sección 5)
rnapeos
(sección 7)
En el capítulo I definiremos estos conceptos con respecto al espacio
euclidi:mo de 3 dimensione;;. (La extensión a dimensiones arbitrarias es
INTRODUCCIÓN
-
11
Yirtualmente automática.) En el capítulo IV ensenaremos la manera de
adaptar estos conceptos a una superficie.
Se hacen unas cuantas referencias a la bibliografía breve que se enumera al final del libro; las hrmos distinguido con paréntesis cuadrados
(corchetes) .
CAPITULO
1
El cálculo en el espacio
euclidiano
Como di ji m os en el prefacio, el propósito con que cumple este capítulo
es el de establecer el lenguaje matcmático que emplearemos en el resto
del libro. :Mucho de lo que hacemos aquí no es más que un repaso de las
partc5 del cálculo elemental que estudian la diferenciación de funciones
ele tres variables, y las curvas en el espacio. Hemos formulado nuestras definiciones de manera que las podamos aplicar con facilidad al estudio
posterior de las superficies.
El espacio euclidiano
El espacio tridimensional se emp]Pa con frecuencia en matemáticas sm
recibir una definición formal. Se dice que es el espacio ele la experiencia
ordinaria. Si se mira el rincón dt: un cuarto, se Yisualiza el conocido proceso por medio del cuz1l se introducen los cjt:s de coordenadas rectangulares y mirlif'ndo se: obtienen tres números para describir la posición de
cada punto. Podemos obtener una ddinición precisa que concuerde con
este cuadro intuiti,·o por medio d('l recurso siguiente: en lugar de decir
que tres números rlc.;niben la jJo•it irín el(' un ¡mnto, diremos que son
un punto.
1.1 DEFrxrcrÓN. El espacio euclidiano de 3 dimensiones E 3 es el conjunto de tod:1s las ternas ordenadas de números reales. Una ü:rna así
p = (ji,, /le, jJ:;'I se llama punto ck E'.
En el álgebra lineal, se demuestra que E" es, de manera natural, 1\ 11
r~spacio Yectorial sobre los números re::tles. De hecho, si p = (pr, f!e, p 3 )
v q = (q1, qc, q 3 ) son puntos ele E", su suma será el punto
P + q
=
(/1,
+
q¡,jh
+
qe,fl3
FJ Jnoducto escalar ele un punto p = (fl¡, jlc.
punto
nn
=
(nh,
nfJ.,_.,ofJ,).
+
1]3).
p,': por el número
a es el
14
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
Se verifica con facilidad que estas dos operaciones satisfacen los ax10mas
de un espacio vectorial. El punto O = (0, O, O) se llama origen ele E".
En el cálculo diferencial se estudia otro aspecto de E 3 a partir de la
idea de las funciones diferenciablcs de valores reales en E'3• Recordaremos
algunas de las nociones fundamentales.
1.2 DEFINICIÓN. Sean x, y y z las funciones de valores reales en E"
tales que para cada punto p = (jJ1, jJ"·' jJ")
z(p)
=
Ji:1·
Estas funciones x, y, z se llaman funciones coordenadas naturales ele E 3 .
También emplearemos índices en la notación de estas funciones, de manera que tengamos
.\'3 =
Por lo tanto, el valor de la función
Xi
z.
en un punto p es el número
Jli, de manera que tenemos la identiclad p = (jJ 1,jle,J!:;) = (x 1 (p),x"(p),
X3 (p)) para cada punto p de E" .. En el cálculo eknwntal no siempre se
hace una distinción clara entre los números jJ 1 , jJ 2 , jJ" y las funciones
x,, x", x 3 • Y en efecto, en la recta real la distinción parece una pedantería,
pero en los espacios ele dimensión más alta, como es E", su ausencia provoca
ambigüedades graves. (En esencia, es la misma distinción la que se hace
cuando denotamos una función en E'1 por una sola letra f, y reservamos
la expresión f (p) para el valor que toma en el punto p.)
Suponemos que el lector tiene familiaridad con la diferenciación parcial
y sus propiedades básicas; en particular, con la regla de la cadena de
diferenciación ele una función compuesta. Trabajaremos sobre todo con
derivadas parciales ele primer orden
uf /u;·, 0/ ¡0z y con derivadas
parciales ele segundo orden u"f jox",
· · · . En algunas situaciones
ocurren derivadas del tercer -e incluso dd cuarto-- orden, pero, para
dejar de preocuparnos de la cantidad exacta ck derivadas que podemos
tomar en un contexto dado, estableceremos la definición siguiente.
1 .3 DEFINICIÓN. Se dice que una función en E 3 ele valores reales f
es diferrnc:able (o infinitamente difcrcnciable, o de clase CC/)) srempre
que existen todas las derÍ\'aclas parciales ele f, ele todos los órdenes, y que
son continuas.
] ,as funciones diferenciables ele valores reales f y r; se suman y multiplican de la monera habitual y se obtienen funciones que vuelven a ser
cliferenciab!es y de valores reales. No hacemos en esto sino multiplicar sus
ya] ores en :cada punto: las fórmulas son
(f
+
g) (p)
= f(p) +
g(p),
(fg) (p)
=
/(plg(p).
-
EL ESPACIO EUCLIDIANO
15
Esta frase, "función difcrcnciable de valores reales" es demasiado larga. En
consecuencia, vamos a con\-cnir en que, a menos que el contexto indique
lo contrario, entenderemos por "función" "función de valores reales", y (a
menos que se plantee la cuestión ele manera explícita) supondremos que
las funciones que estudiaremos son diferenciables. Tampoco queremos abusar de este convenio; con el objeto ele hacer énfasis, las palabras "diferenciable'' y "de ya]ores reales" seguirán apareciendo con bastante frecuéncia.
La diferenciación es siempre una operación local: para calcular el
valor de la función uf j2x en un punto p de E", no es neccs<Jrio más que
saber los valores de f en todos los puntos q de E 3 que estén suficientemente
cerca de p. Por lo tanto, la definición 1.3 es indebidamente restrictiva; no
es necesario quc el dominio de f sea la totalidad de E\ sino que basta con
que sea un conjunto abir:rto ele E'1• Por conjunto abierto O ele E 3 entendemos un subconjunto de E 3 tal que si un punto p está en O también lo está
cualquier otro punto de E 3 que se encuentre suficientemente cerca de p.
(En el cap;tulo II se define lo mismo ele manera más precisa.) Por ejemplo,
el con junto ele todos los puntos p = (p 1 , p~, p3 ) en E 3 tales que p1 > O es
un conjunto abierto, y la función ;·::: log x que se define en este conjunto
es, desde luego, diferenciable, aunque su dominio no es la totalidad de E 3 •
En general, los resultados de este capítulo conservan su yalidez si se substituye E" por un conjunto abierto arbitrario () ele E 3 •
El motivo por el que hemos hablado del espacio euclidiano tridimensional
líO es otra cosa que, ésta es la dimensión que emplearemos con más frecuencia
en el trabajo posterior. Sería igual de fácil trabajar en el espacio euclidiano
n-dimensional E", en el que los puntos son n-adas p = (p 1 , • • · , ji 11 ) y que
tic·nc n funciones coordenadas naturales x 1 , • • ·, x 11 • Todos los resultados
de este capítulo son válidos en los espacios euclidianos de dimensiones
arbitraria';, aunque rams veces aprovecharemos esto, con la excepcicín del
caso del p!ano euclidiano E 2 • En particular, los resultados son válidos en la
recta real E 1 = H. 1viuchos ele los conceptos que se presentan se han
formulado específicamente para el estudio de dimensiones mús altas, sin
embargn, y por lo tanto, resultan un tanto enfadosos -por su atención
a los c!cUlllcs-- cuando se lt>s reduce a la dimensión l.
EJERCICIOS
-
=
y g = y sen z funciones en E". Exprésense las funciones
siguicntec; en términos de x, y, z:
l. Sean /
. ¿¡
b 1 -j
,-,
l
e)
u
2" g)
(
.:
(f
b
+
-f.
\'
d'¡ (. (sen f).
16
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
2. Encuéntrese el valor de la función
f = x 2 y - y2 z
cn cada uno de los
puntos:
a) (1, 1, 1).
b) 3,- l, 1).
e) (a, 1, 1 - a) .
d) (t,t 2,t'1).
3. Exprésese
a)
f
b)
f=
=
cf /ex
en términos de .\',
xsen (xy)
sen g,
g
+
yy
z
Sl
ycos (xz).
= e\
h = x"
+ y2 + .::2.
4. Si g1, g2, g,1 y h son funciones ele valores reales en E 3, entonces
f
=
h(gl, g2, g,)
es la función en la que se verifica
para todo
Exprésese 3f jox en términos de x, y y z s1 h
2
a)
f = h (X +
b)
f=
h (ex, ex+Y, ex).
e)
f
h(x, -x, x).
=
=
.\
2
-
p.t
yz y si
y, y 2 , X + Z).
Vectores tangentes
Desde el punto ele vista intuitivo, un vector en E" es un segmento ele recta
con orientación, o una "flecha". Los n·ctores se usan ampliamente en la
física y en la ingeniería para describir fuerzas, velocicladcs, momentos
angulares y muchos otros conceptos. Para obtener una definición qt;c sea
tan práctica como precisa, clescribirnnos una "flecha" en E'1 al dar su
punto ele partida p y el cambio, o vector v, necesario para llegar <1 su
otro extremo, p + v. En un sentido estricto, v no es más que un punto
de E 3 .
2.1 DEFINrcró:-;.:¡: Un vector tangente Vp a E'1 consiste en dos puntos
ele E": su j1arte z ectorial v y su jnmto dr aplicaci,;n p.
Siempre representaremos Vp como la flecha que 'é'a del punto p al
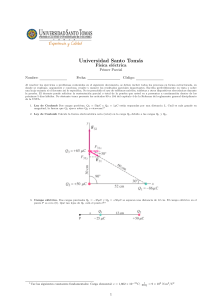
punto p + v. Por ejemplo, si p = (1, l, 3) y v = (2, 3, 2), entonces vfl
va de (1, 1, 3) a (3, 4, 5), como se ve en b figura 1.1.
Dircr:ws que l0s \'cctmTs L\Jl;?:C'l11c:, son igu~;lt":, V¡¡ = ·w,1, si y sólo si
t Consecuencia de esto es la identidad f = f(x, y, z).
:¡:
El término "tangente" de esta definición adquirirá un significado más directamente gCQm~trico en el capítulo IV.
17
VECTORES TANGENTES
z
X
Figura 1.1
tienen la misma parte vectorial, v = w, y el mismo punto de aplicación,
p = q. Los vectores tangentes Vv y Vq con la misma parte vectorial aunque
con puntos diferentes de aplicación, se llaman paralelos (figura 1.2). Es
esencial reconocer que Vp y Vq son ,·ectores tangentes diferentes si p =ft q.
En la física, el concepto del momento de una fuerza demuestra esto con
claridad suficiente: al aplicar la misma fuerza ven puntos diferentes p y q
de un cuerpo rígido se pueden tener efectos rotacionales muy diferentes.
2.2 DEFINICIÓN. Sea p un punto de E 3 . El conjunto 1'v(E 3) que
consta de todos los vectores tangentes que tienen a p como punto de
aplicación se llama espacio tan gen te de E 3 en p (figura 1.3) .
Insistiremos en que E 3 tiene un espacio tangente distinto en todos y
cada uno de sus puntos.
Puesto que todos los vectores tangentes en un espacio tangente dado
licnen el mismo punto de aplicación, podemos tomar de E-3 la adición y
multiplicación escalar para convertir Tv(E") en un espacio vectorial. De
Figura 1.2
Figura 1.3
18
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
1
1
1
1
1
1
1
v,.
Figura 1.4
manera explícita, definiremos v P + Wp como ( v + w) ¡¡, y si e cs un número definimos c(vp) como (cv)v. Esto no t:s más que la "ley del paralelogramo" que es habitual en la adición de \Tctores, y en la multiplicación
escalar por e no se hace sino estirar un vector tangente al multiplicarlo
por el factor e; y si e < O, invertir además su dirección (sentido) ( figura 1.4).
Estas operaciones en cada espacio tangente Tp (E 3 ) lo hacen un espacio vectorial isomorfo al mismo E". En efecto, se desprende inmediatamente de las definiciones anteriores que, para un punto fijo p, la función
v---¿ vP es un isomorfismo lineal de E 3 a Tp(E"). PS decir, una transformación lineal que es uno a uno y sobre.
Un concepto estándar de la física y ele la ingcninía rs el ele campo
de fuerzas. El campo de fuerzas gravitacional de la Tinra, por ejemplo,
asigna a cada punto del espacio una fuerza (un vector) dirigido al centro
ele la Tierra.
2.3 DEFINICIÓN. "Cn campo vrctorial V en E' es una función que
asigna a cada punto p ele E 3 un vector tangente V (p) a E 3 en p.
Si nos expres;unos en términos más burdos, podemos dt:cir que un
campo vectorial es una numerosa co!rcción ele flechas, una en cada
punto de E 3 .
Existe un álgebra natural de los campos vectoriales. Para describirla,
empezaremos por examinar nuevamente la ic!Pa familiar ele la suma de
dos funciones ele valort:s reales f y g. Es posible sumar f y g gracias a que
podemos sumar sus valores en cada punto. Lo mismo se puede decir ele los
campos vectoriales V y TV. En cada punto p, se tiene que sus valores
V (p) y W (p) están en el mismo espacio vectorial, que será el espacio
tangente Tv(E"), y, en consecuencia, podernos sumar V(p) y W(p). Y,
..
VECTORES TANGENTES
19
por lo tanto, podemos sumar v y w al sumar sus valores en cada punto. La
fórmula de esta suma es, de esta manera, la misma que la de la suma de
funciones:
(V+ W) (p) = V(p)
+
W(p).
Este esquema se nos presentará una y otra vez. Lo llamaremos principio
de operar punto por punto: si se puede ejecutar determinada operación
en los valores de dos funciones en cada punto, entonces se puede extender
la misma operación a las funciones mismas; no hay más que sumar sus
valores en cada punto.
Por ejemplo, es este principio ele operar punto por punto el que invocamos para extender la operación ele multiplicación escalar (en los espacios
tangentes ele E 3 ) . Si f es una función ele valores reales en E 3 y si V es un
campo vectorial en E", entonces se define fV corno el campo \"PCtorial
en E 3 tal que
(fV) (p) = /(p) V(p)
para todo p.
Aquí nos proponemos determinar ele manera concreta qué aspecto es el
de los campos vectoriales. Con este fin, vamos a definir tres campos vectoriales especiales que nos servirán de "base" p~1ra todos los campos vectoriales.
2.4
DEFINICIÓN.
Sean U 1 , Ue y U 3 los campos vectoriales en E" tales
que
U1(p)
(l,O,O)v
Ue(p)
(0, 1, O)v
U"(p)
(0, O, 1 lv
para cada punto p ele E 3 (figura 1.5). Llamamos con juntamente a U 1 ,
Ue, U" el campo natural de sistemas de referencia en E 3 •
Por lo tanto, U; (i
rección positiva X¡.
=
1, 2, 3) es el campo vectorial unitario en la di-
2.5 LEMA. Si V es un campo vectorial en E 3 , hay tres funciones de
valores reales que se cletenninan de manera única, ¡• 1 , v", v 3 en E 3 tales que
Las funciones v 1 , v", v" se llaman funciones r oordenadas euclidianas ele V.
-
Demostración. Por definición, el campo vectorial V asigna a cada
punto p un vector tangente V (p) en p. Por consiguiente, la parte vectorial ele V (p) ele pende ele p, de manera que la expresamos como ( v!(p),
V:2 (p), V:; (p)). (Esto nos define a v 1 • Ve y v.1 como funciones de valores
reales en E 3 .) En consecuenCia,
20
EL CÁLCULO EN EL ESPACIO EUCLIDIA!\0
V(p)
(vdp), v2(p), v3(p) )P
= v1 (p) (1, O, O)p + v2 (p) (0, 1, O)¡¡+ u;;(p) (0, O, l)r
= v1(p) U1(p)
+
+
v2(p) U2(p)
v3 (p) U 3 (p)
para cada punto p (figura 1.6). Por nuestras definiciones (que implican
el principio de operar punto por punto) esto significa que ]o;; campos
vectoriales V y¿ viUi tienen el mismo valor (de vectores tangentes) en
cada punto. En consecuencia V = L; vJ!i·
1
En la última oración her.nos empleado
dos de nuestros convenios estándar: ::S V; U;
significa la suma sobre i = 1, 2, 3; el símbolo de Halmos (
señala el final de una
demostración.
La identidad ele vectores tangentes ( a 1 ,
ac,a 1 )p = ¿:a¡[f;(p) que aparece fé!l la
cleJJJostración será objeto de uso frecuente.
Figura 1.5
Los cálculos en que intervienen los campos vectoriales se podrún expresar siempre
en términos de sus funciones coordenadas euclidianas. Por ejemplo, la
suma y la multiplicación por una función quedarán expresadas en términos ele coordenadas por
Xa
ll
f(L; v;U;) =¿(fu;) Ui.
z
-------/1
Va(P)Ua(p)
// 1
/
1
1
V(p):
:
1
1
/
v2(p)U2(p)
~(!»~¡(pl ___ j /
/
/r---------------------------------y
X
Figura 1.6
DERIVADAS DIRECCIONALES
21
Puesto que el cálculo que estudiamos aquí es diferencial, es natural que
pidamos e¡ u e los diversos objetos de nuestro estudio sean diferenciables. Un
campo vectorial V será dif erenciable cuando lo sean sus funciones coordenadas euclidianas (en el sentido de la definición 1.31. De~ aquí en adelante,
al decir "campo vectorial" entenderemos "campo vectorial cliferenciable".
EJERCICIOS
1. Sean v = (-2, 1, -1) y w = (0, 1,3).
a) En un punto arbitrario p, exprésese el vector tangente 3v P - 2w P
como combinación lineal de U,(p), Uz(p), U 3 (p).
b) Si p = ( 1, 1, O), hágase un di bu jo preciso en el que se vean los
cuatro vectores tangentes V¡;, W¡¡, - 2vp y Vp + Wp2. Sean V= xU 1 + yU 2 y W = 2.t 2 U 2 - U 3 • Calcúlese el campo \TCtorial W - x V y encuéntrese su valor en el punto p = ( - 1, O, 2) .
3. En cada caso, exprésese el campo vectorial dado V en la forma estándar
:¿ ViUi.
a) 2z 2 L' 1 = 7V + xyU".
b) V (p) = (pi, jJ.> - p1 , O) P para todo p.
e) V= 2(xU1 + yU2) - x(U1- y 2 Us).
d) En cada punto p, V ( p) es el vector que va del punto (pl,
al punto ( 1 + p,, PzPs, Pz) ·
e) En cada punto p, V ( p) es el vector que va de p al origen.
p", fJs)
4. Si V= y 2 U 1 - x 2 U 3 y W = x 2 U 1 - zU 2 , encuéntrense las funciones
f y g tales que el campo vectorial fV + g V se pueda expresar en términos ele u2 y u" solamente.
5. Sean V1 = U1 - xUo, Vz = Uz y Vs = xU1 + Us.
a) Demuéstrese que los vectores V 1 ( p), V 2 ( p), V 3 ( p) son linealJ;Ilcnte indepcndiPntes en cada punto de E".
b) ExprésPsc el campo vectorial xU 1 + yU 2 + zU3 como combinación
lineal ele V 1, V z, V 3·
3
-
Derivadas direccionales
Con cada vector tangente Vp a E 3 tenemos asociada la recta t-+ p + tv
(véase el ejemplo 4.2). Si f es una función diferenciable en E 3 , entonces
t-+ f (p + tv) será una función ordinaria y diferenciable en la recta real.
Es evidente que la derivada de esta función en t = O nos dirá cuál es la.
tasa inicial de cambios ele f a medida que p avanza en la dirección v.
22
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
3.1 DEFINICIÓN. Sea f una función diferenciable en E 3 de valores
reales, y sea v 1, un vector tangente a E'l. Entonces el número
d
V¡¡[f]
se llama derivada de
f
dt
=
(f ( p
+
tv) ) \t~o
con respecto a v 11 .
Esta definición aparece en el cálculo elemental con la restricción adicional de que Vv sea un vector unitario. Aunque nosotros no imponemos
esta restricción, hablaremos de cualquiPr manera ele vp[f] corno de riuada
direccional.
Por ejemplo, calculemos vp[f] para la función f = x 2 yz, con p = ( 1,
1, O) y v = (1, O, -3). Entonces
p
+
tv = (1, 1,0)
+
t(1,0, -3) = (1
+
t, 1, -3t)
nos describe la recta que pasa por p en la dirección v. Al evaluar
largo ele esta recta, obtenernos
f
a lo
f(p + tv) = (1 + t) 2 ·1·(-3t)
Ahora bien,
~
(f(p
+
tv)) = -3- 12t- 9t 2 ;
en consecuencia, en t =O, encontramos que vp[fl = -3. Por lo tanto, en
particular, la función f es (inicialmente) decreciente a medida que p
avanza en la dirección v.
El lema siguiente nos enseña la manera de calcular vp(f] en general
en términos de las derivadas parciales de f en el punto p.
3.2
LEMA.
Si v 11
=
( v1, Vz, Vs)
Demostración. Sea p
=
(p¡,
p
es un vector tangente a E.>, entonces
Pz, p 3 ) ;
entonces
Nos servimos de la regla de la cadena para calcular la derivada en t
de la función
fíp + tv)
=
f(jJ¡
+
tu,,p 2
+
tv 2 ,p,, +tu:;).
Put>sto que
d
dt
(j!;
+
tv;)
=
v;,
=
O
23
DERIVADAS DIRECCIONALES
obtenemos
vvUl
=
(f(p
di
( f
+
tv)) lt=il
=
~ ,.,of
UXi
1
(p) v;.
Por medio de este lema, volveremos a calcular vv[fl en el ejemplo
anterior. Puesto que f = x 2 yz, tenemos
a¡
of = 2xyz,
:::;-
a¡
o
-oy = .x-z ,
ox
o
-=x-y.
í'z
Por consiguiente, en el punto p = (1, 1, O),
~~
(p) =O,
o,
a¡
(p)
=
0
+
+ (-
ey
a¡ ( )
oz
p
y
=
l.
Entonces, por el lema,
V p[fl =
0
3) 1
=
-
3,
como se obtuvo antes.
Las propiedades principales de esta idea de derivada se enunetan en
el teorema 3.3.
3.3 TEOREMA. Sean las funciones
gentes y a y b números. Entonces
f
y g en E 3 ,
1)
2)
(avp + bwp) [tJ = avv[fl + bwp[f].
vv[af + bg] = avp[f] + bv¡¡[g].
3)
Vv[fg] = Vp[f]"g(p)
+
Vv
y
Wp
vectores tan-
f(p) 'Vp[g].
Demostración. Podemos deducir las tres propiedades a partir del lema
anterior. Demostraremos 3, por ejemplo. Por el lema. si v = ( v 1 , v 2 , v3 ) ,
entonces
Pero
En consecuencia,
-
cf (pl·g(p)
vp(fg] =~vi ( ;-,~
ux,
=
2/
;-~~
( ~v¡ uXL
(p) ) g(p)
+ f(p)• -2g- (p) )
'
+
f(p)
( ~v¡:2g~
(p) )
tX 1
1
24
EL
CÁLCULO
EN
EL ESPACIO EUCLIDIANO
Podemos resumir las dos primeras propiedades del tc:orem:J anterior
si decimos que vp[f] es lineal en Vp y en f. La tercera propiedad, como nos
lo hace ver claramente la demostración, es en esencia la regb habitual
de Leibniz para la diferenciación de un producto. Al margen de la forma
que tenga la diferenciación, siempre tendrá las propiedades adecuadas
lineal y de Leibniz.
.
A continuación, aplicaremos nuestro principio de operar punto por
punto para definir la operación de un campo vectorial V en una funciéin
f. Como resultado tenemos la función de valores reales V[!J cuyo valor en
cada punto p es el número V ( p) [fl; es decir, la derivada de f con respecto
al vector tangente V (p) en p. Este proceso no debe resultar sorprendente,
puesto que en una función f en la recta real se empieza por definir la
derivada de f en un punto; entonces la función derivada df j dx es la función cuyo valor en cada punto es la derivada en ese punto. Es evidente
que la definición de V[fJ es estrictamente análoga a este proceso familiar.
En particular, si U 1 , U 2 , U 3 es el campo estándar ele sistemas ele referencia
en E 3 , entonces U 1 [fJ = ofjcx;. Esto es una consecuencia inmediata del
lema 3.2. Por ejemplo, U 1 (p) = (1, O, O)v; en consecuenCia
que es precisamente la definición de (of jox 1 ) (p). Esto se cumple en todos
los puntos p = ( jl1, p2, p3) ; en consecuencia, U1[fJ = cf j2x 1.
Emplearemos más esta idea de la derivada direccional en el caso ele
los campos vectoriales que en el de los vectores tangentes individuales.
3.4 CoROLARIO. Si V y W son campos vectoriales en E 3 y si
funciones de valores reales, entonces
f,
g, h son
1) (/V+ gW)[h] = fV[h] + gW[h].
2) V[af + bg] = aV[f] + bV[g] para todos los números reales a y b.
3) V[fg]
=
V[fl· g
+
fV[g].
Demostración. El principio de operar punto por punto constituye nuestra garantía de que, p:1ra deducir estas propiedades del teorema 3.3, sólo
necesitaremos tener cuidado acerca de la ubicación de los paréntesis. Por
ejemplo, demostraremos la tercera fórmula. Por definición, el valor de la
función V[fg] en pes V(p)[fg]. Pero, por el teorema 3.3, esto es
V(p)[f]•g(p)
+ f(p) V(p)[g]
=
V[f](p)·g(p)
(V[f]-g
+
+ f(p) V[g](p)
f•V[g]) (p).
1
-
25
DERIVADAS DIRECCIONALES
Si se piensa que el empleo de los paréntesis es aquí extravagante, el
lector debe recordar que la demostración meticulosa ele la fórmula de
Leibniz
d
df
dg
--(fr.;) =-·g+f·-dx ·
dx
dx
ha ele consistir exactamente en el mismo desplazamiento de paréntesis.
Adviértase que la linealidad de V(f] en V y en f sirve para funciones
como "escalares" en la primera fórmula del corolario 3."1, pero sólo para
números como "escalares"' en la segunda. Esto se desprenclr dd hecho de
que fV significa simplemente multiplicación, mientras que V[f] es una
diferenciación.
La identidad U;[f] = ofjoxi simplifica mucho la ejecución de cálculos
concretos. Por ejemplo, si V = x~ 1 - y 2 U 3 y f = x 2 y + z\ entonces
V[f] = xU,[x"y]
+ xU1[z 3 ] - y"U 3 [x 2 y]-
yT 3 [z 3 ]
= x(2xy) +O- O- y""(3z 2 )
=
2x 2 y- 3y 2 z2 •
3.5 CoMENTARIO. Puesto que la notación con subíndices vP del vector tangente es un poco tediosa, a partir de aquí omitiremos con frecuencia
el punto de aplicación p de la notación. Con esto no se causa confusión,
puesto que v y w siempre denotarán vectores tangentes y p y q puntos de
E 3 • En muchas situaciones (por ejemplo, la definición 3.1) la cuestión del
punto de aplicación es decisiva, y la indicaremos o bien por medio de la
notación vieja Vp o por la frase "vector tangente va E 3 en p".
EJERCICIOS
el vector tangente a E 3 para que el v = (2, -1, 3) y p = (2,
O, -1). Trabájese directamente a partir de la definición para calcular
la derivada direccional vp[f], donde
1. Sea
Vp
a)f=y 2z.
b)f=x 7 •
c)f=excosy.
2. Calcúlense las derivadas del ejercicio 1 por medio del lema 3.2.
-
3. Sea V= y 2 U1 - xU,, y sean
a) Vffl.
e) V[fg].
b) V[g].
d) fV[g] - gV[f].
f = xy,
g
= z3 • Calcúlense las funciones
e) V[/ 2 + g2 ].
f) V[V[f]].
4. Demuéstrese la identidad V = 2: V[xi]U;, donde x 1 , x 2 , x.1 son las funciones coordenadas naturales. (Indicación: evalúese V= 2: v;Ui en xi).
5. Si Vffl
=
W[f] para toda función
f
en E 3 , demuéstrese que V
=
W.
26
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
4 Curvas en
E3
Sea I un intervalo abierto en la recta real R. Interpretaremos liberalmente
esto de manera que no solanwnte se incluya el tipo habitual de intervalo
abierto a < t < b (donde a, b son números reales), sino tambit:n los tipos
a < t (una semirrecta a + oo) , t < b (una semirrecta a - oo ) , y también
la totalidad de la recta real.
Podemos representarnos una curva en E" como el viaje que emprende
un punto móvil a. En cada momento t en un intervalo abierto, se localiza
a a en el punto
de Ea. En términos rigurosos, entonces, tenemos que a es una función ele
I a E\ y las funciones de valores reales a 1 , a 2 , <X:; son sus funciones coordenadas
euclidianas. Es así como escribimos a = ( a 1 , a 2 , a:3 ) , con lo c¡ue, por supuesto, querernos dar a entender que
para todo t en el intervalo l. Definimos la función a como diferenciable
siempre que sus funciones coordenadas (ele valores reales) sean diferenciables en el sentido habitual.
4.1 DEFINICIÓN. Una curva en E-3 es una función diferenciable a
I ~ E-'· de un intervalo abierto I en E·\
Pondremos varios ejemplos ele curvas, con los que en el cap;tulo II
experimentarel!los para obtener resultados acerca ele la geometría de esas
curvas.
4.2
EJEMPLO
1) La recta. La recta es la clase más simple de curva del espacio euclidiano; sus funciones coordenadas son lineales (en el sentido de t ~ at + b,
y no en el sentido homogéneo t ~ at). De manera explícita, la curva
a: R ~E", tal que
(q::-¡'0)
es la recta que pasa por el punto p = a(O) en la dirección q.
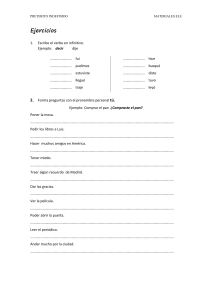
(figura 1.7.) La curva t~ (acost, asent, O) v1ap
alrededor de un círculo de radio a > O en el plano .~:y de E'~. Si esta
curva asciende (o desciende) con t:-tsa constante, obtendremos una /¡él ice
a: R ~ E", que se determina por la fórmula
2) La Ulice.
a(t)
=
(a cos t, a sen t, bt)
27
CURVAS EN
z
1
y
X
X
Figura 1 .8
Figura 1.7
donde a > O, b =F O. (Siempre usaremos el término hélice para representar la hélice circular recta.)
3) Sea
....
a:(t)
=
o< t < -rr/2.
para
(2cos 2 t,sen2t,2sent)
e
Esta curva a tiene una propiedad notable: sea
el cilindro en E 3 construido sobre el círculo en el plano xy con centro en (1, O, O) y radio l.
Entonces a sigue la ruta que corta en
la esfera S de radio 2 y centro
en el origen (figura 1.8) .
e
\
4) La curva a:
R~
E 3 tal que
comparte con la hélice de 2 la propiedad de elevarse constantemente.
Sin embargo, queda sobre la hipérbola xy = 1 del plano xy, en lugar del
círculo del otro caso.
5) La curva a: R
-
~
E 3 tal que
Si las funciones coordenadas de una curva son suficiPntemcnte sencillas, se
puede determinar la fom1a de la curva en E\ por lo menos aproximadamente, por el procedimiento de '·fuerza bruta" ele ir determinando su:;
puntos. Podremos obtener un cuadro r:-~zonable ele esta curva cuando
O< t < 1 al calcular a(t) para t = O, ~1¡ 0 , 1¡2, ~~ 0 , 1
Si visualizamos una curva a en E" como punto móvil, entonces en cada
momento t hay un vector tangente en el punto .a ( t) que nos da la velocidad instantánea ele a en ese morrwnto.
28
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
4.3 DEFINICIÓN. Sea a: 1 ->E'< una curva en E 3 con a= (o:,, ae, a3).
Para cada número t en 1, el vector de velocidad de a en t es el vector
tangente
a , ( t)
=
do:2 ( t), ~da:;-- \ t)
- - (t), ---
(do:1
1
dt
dt
)
dt
n(t)
en el punto ,a(t) de E 3 (figura 1.9).
Daremos la siguiente interpretación geométrica de esta definición. La
derivada en t de una función de valores reales f en R está dada por
df (t) =
dt
lím f(~~.:.: ·O
!::,.t
f(!l.
La misma fórmula tiene sentido si substituimos
( o:1, (r2, o: 3 ) . De hecho,
1
- (a ( t
t::.t
+ ~t)
- a ( t) )
(
_c:l (t
+
f
por una curvz. a
=
t::.t L=-_c:_&l_
t::.t
Cl'"(t
~-~2t-~
()'" (t)' a~ -~2t-=-~&)_}
Este es el vector que parte de a ( t) y va a a ( t + t::.t), multiplicado escalarmente por 1/ t::.t (figura 1.1 O).
Ahora bien, a medida que .6.t se vuelve más pequeño, a (t + t::.t) se
aproxima a a(t), y en el límite, cuZ~ndo t::.t ..__,O, obtenemos un vector
tangente a la curva a en el punto a(t), a saber (do:,fdt(t), daddt(t),
a'(t)
/e-----Figura 1.9
do:,/ dt (t) ) . Como lo sugiere la figura, el punto de aplicación ele este
vector ha ele ser el punto a ( t). Por lo tZ~nto, la operación estándar de derivadas da lugar a nuestra definición ele la velocidad de una curva.
La aplicación de la identidad
(v1, v2, v 3 )v
=
¿: v;U;(p)
29
CURVAS EN E 3
1
t.t (a(t
+ t.t)
- a(t))
~~==~~--------~
a(t)
a(t
+ t.t)
a
Figura 1.10
al vector de velocidad a' ( t) en t produce la fórmula alterna
o:' (t) =
2: (~~~
dt
(t)
ui (o:(t)).
Por ejemplo, la velocidad de la recta o: ( t) = p
+ tq
es
El hecho de que a es recta se refleja en que todos sus vectores de velocidad
son paralelos entre sí; lo único que cambia es el punto de aplicación, a
medida que cambia t.
En la hélice
(o: cos t, a sen t, b t ) ,
rr ( t)
la velocidad es
o:' ( t)
=
( -
a sen t, a cos t, b) a et) .
Vemos la elevación constante de la hélice en la constancia de la coordenada
z ele a' ( t) .
A partir de una curva o:, se pueden construir muchas curvas nuevas
que siguen la misma trayectoria que o:, aunque viajen con rapidez diferente.
4.4 DEFINICIÓN. Sean I y J intervalos abiertos en la recta real R.
Sea rr: I----? E 3 una curva y sea h: J-¿ I una función diferenciable (ele
valores reales) . Entonces se dice que la función compuesta
{3
=
a ( h) :
J -¿ E 3
es una curva que se llama rej!arametrizaciún de a por h.
-
En cada momento s del intervalo ], la curva {3 cstar:t en el punto
{3(s) = rr(h(s) ), que la curva a alcanza en el momento h(s) del intervalo I
(figura 1.11). Por lo tanto, {3 sigue el mismo camino ele o:, pero en general
{3 llega a un punto clado ele él en un momento diferente del de o:. En la
práctica, para calcular las coordenadas de {3, se substituye sencillamente
t = h(s) en las coordenadas ,t 1 (t), a"(t), rr 3 (t) de a. Por ejemplo, supon-
30
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
~t(s)
= a(h(s))
8
J(
~'~Ea
~
t
)/
Figura 1.1 1
gamos que a ( t) = ( y t, t v'-t,
J: O < s < 2, entonces,
j3 (S)
=
-t)
en l:O<t<4. Si h(s)
s" en
a ( f¡ (S) ) = .,y (s 2) = (S, s3, 1 - s 2) .
Por lo tanto, la curva a: 1 -é> E" ha sido rcparametrizada por h para obtener la curva f3: J---'> E 3 .
El lema siguiente relaciona la velocidad de una curva y de una reparametrización.
4.5
LEMA.
Si f3 es la reparametrización de a por h> entonces
f3'(s) = (dhjds) (s) a' (h(s) ).
f3(s) = a(h(s)) = (<t 1 (h(s)),a 2 (h(s)),<t,(h(s)).
En la notación de "primas" para las derivadas, la regla ele la cadena de
una composición de funciones de valores reales f y g se lee como (g(f))' =
g' (/) · f'. Por lo tanto, en el caso que nos ocupa obtenemos
a¡(h)'(s)
=
ai'(h(s)) ·h'(s).
Por la definición de velocidad, de esto se desprende que
(3' (S)
=
rx ( h ) (S)
=
(a/(lz(s)) ·h'(s), a/(h(s)) ·h'(sl, a/(h(s)) · h'(s))
h'(s)a'(h(s) ).
=
1
1
Según este lema, para obtener la vclocidacl ele una reparametrización
ele a por h> se reparamctriza en primer lugar a' por h, y entonces se multiplica escalarmentc por la derivada de h.
Puesto que las \·elocidades son vectores tangentes, podemos tomar la
derivada de una función con respecto a una velocidad.
4.6
en E
3
.
Sea a una curva Pn E 3 y sea
EntoncPs
LE:\IA.
,y'(tlrtJ =
~ujpl
f
(tJ.
una función diferenciable
-
CURVAS EN E
Demostración. Puesto que
a'(t) =
31
3
(9~ 1 , ~1:"' ~;;')" ; ...__,. _tP e~¡ ,2.e;
concluimos, por el lema 3.2, que
a'(t)[f] =
~
()f_ (a(t)) da!·¡ (t1.
é t
;
Pero la función compuesta f (a) se puede expresar como f (ctt~ etc·· ct,),
y la regla de la cadena nos da exactamente el mismo resultado en b derivada de f (a),
1
Por definición, a' ( t) [f] es la rapidez de yariación de f a lo largo de la
recta que pasa por a ( t) en la dirección a' ( t) (figura 1.12) . (Si ct' ( t) =F O,
ésta es la recta tangente a a en a ( t) ; Yéase el ejercicio 9.) El lema nos
muestra que esta rapidez de variación es la misma que la de f a lo largo
de la curva a.
Puesto que una curYa a: 1 ~ E 3 es una función, tiene sentido decir que a
es uno a uno; es decir, a ( t) = a ( t 1 ) sólo si t = t 1 . Otra propiedad especial
ele la curva es su periodicidad: una curva a: R ~ E 3 es jJcriódica si hay un
números jJ > O tal que a ( t + jJ) = a ( t) para todo t; el menor de estos números jJ se llama entonces jJníodo de a.
Desde el punto de vista del cálculo, la condición más importante que se
puede pedir a una curva a es que sea regular, y esto significa que todos
sus vectores ele velocidad han de ser diferentes de cero. U na curva aS: no
puede tener puntas agudas ni esquinas.
Los comentarios siguientes acerca de curvas (que se hacen sin demostraciones) no son parte esencial de nuestra exposición, pero los u>aremos
en el capítulo IV. Consideraremos, en el caso del plano E", otra manera
conocida de formular el concepto ele "curva". Si f es una función diferenciable ele valores reales en E", sea
e: f
=a
el conjunto ele todos los puntos p en E" tales que f (p) = a. Ahora bien,
si las derivadas parciales 2f /2x y of /oy no son nunca simultáneamente cero
en ningún punto ele e, entonces e consta ele una o más "componentes"
y
-Figura 1.12
Figura 1.13
32
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
separadas, a las que llamaremos Curvas. t Por lo tanto, C: x 2 + y 2 = r 2
es la circunferencia de radio r con centro en el origen de E 2 , y la hipérbola
C: x 2 - y 2 = r" se parte en dos Curvas ("ramas") C 1 y C 2 , como se ve en
la figura 1.13.
Toda Curva C es la trayectoria de muchas curvas regulares a, que se
llaman parametrizaciones de C. Si C es una Curva cerrada, entonces tiene
una parametrización periódica a: R ~ C. Por ejemplo, la curva.
a(t) = (r cos t, r sen t)
es una conocida parametrización de la circunferencia que acabamos de
dar. Si Ces una Curva que no es cerrada (a Curvas así se les llama a veces
arcos), entonces toda parametrización (3: 1 ~ C es uno a uno. Por ejemplo,
(3(t)
parametriza la rama x
=
> O de
(r cosh t, r senh t)
la hipérbola que vimos antes.
EJERCICIOS
1. Calcúlese el \·ector de YClocidad ele la curva 3 en el ejemplo 4.2
para valores arbitrarios de t y en t = "/ 4.
2. Trácese la curva 5 dd ejemplo 4.2 por medio del método que se
sugiere en ese lugar. En el di bu jo, represéntense los n:ctores ele veloc:iclacl en t = O, J, l.
3. Encuéntrense las funciones coordenadas de la curva (3 = a ( h), donde
a es la curva (3) del ejemplo 4.2 y h es la función en J: O < s < 1
tal que h(s) = sen··1 s.
4. Encuéntrese la curva (única) tal que a(O)
( t", t, e 1 ).
(1, O, -5) y a'(t)
5. Encuéntrese una recta que pase por los puntos (1, -3, -1) y (6,
2, 1) . ¿Se corta esta recta con la que pasa por los puntos ( - 1, 1, O) y
(-5, -1, -1)?
6. Dedúzcase del lema 4.6 que en la definición ele derivada direccional
(definición 3.1), la recta t ~ p + tv se puede reemplazar por cualquzer curva a con velocidad inicial v p, es decir, tal que a (O) = p
y a'(O) = Vp·
7.
(Continuación). Demuéstrese que las curvas dadas por ( t, 1 + t", t),
(sen t, cos t, t) y (scnh t, cosh t, t) tienen todas la misma \:elociclad
t En (solamente) esta sección emplearemos la C mayúscula para distinguir
este concepto del de la curva a: 1 -¿ E 3 •
33
1-FORMAS
inicial Vv. Si f = x 2
una de las curvas.
-
y2
+
z 2 , calcúlese vv[fJ al evaluar
f
en cada
8. S Fa h (s) = log s en ] : s > O. Reparametríccse la curva ( 4) del ejemplo 4.2 por medio de h. Compruébese la validez de b ecuación del
lema 4.5 en este caso al calcular separadamente cada uno de sus
miembros.
9. Si t tiene un valor fijo, la recta tangente a una CUlTa regular a en
a(t) es h recta u--¿a(t) + ua'(t), donde hemos omitido el señalamiento del pun~o de aplica6ón de a' ( t). Encuéntrese la recta tangente a la hélice a(t) = (2 cos t, 2 sen t, t) en los puntos a(O) '"
a(-;;-/4).
1O. Trácense las Curvas siguientes en E 2 y encuéntrense parametrizacionPs de cada una.
a) e: 4x 2 + y 2 =o l.
b) e: 3x + 4y = l.
-
S
e)
d)
e: y= eT.
e: x2/3 + y2/3
1,
X> o, y> O.
1-formas
Si f es una función de valores reales en E", entonces se define en el cálculo
elemental la diferencial de f como
a¡
df = --- dx
ox
a¡
a¡
+ -oy
dv + · - dz.
. ()z
~o siempre se aclara con ''x::tctitud el significado de esta expresión formal.
En esta sección, le ciaremos un tratamiento riguroso mediante la idea de
1-fonnas, que resultará decisiva en momentos de nuestro trabajo posterior.
5.1 Dr:FrNICTÓN. Una 1-forrna 1' en E 3 es una función ele valores
reales en el conjunto de todos los vectores tangentes a E' t;Ü que q> es lic1eal
en cacla punto, es decir, que
para cualesqcliera números a, b y vectores t;mgentes v, w en el m1smo
punto de E 3 •
-
Insistimos en que para cada vector tangente v a E 3 , una 1-forma q,
dcfint~ un número real q,(v); y para cada punto p en E';, la función que
resuli.a ,¡,¡¡:T 71 (F?)--¿ R es linC'al. En comecuencia, en cada punto p, 'Pv
es elemento del fsjJacio dual de T¡¡(E 3 ). En este sentido, la ide:1 de 1-forma es h dual de la de un campo vectorial.
La suma de las 1-formas ,¡, y ¡f; se define ele la manera positi,·a que
E'S habitual
31
EL c,\LCULO EN EL ESPACIO EUCLIDIANO
(~
+ 0) (v) =
~(v)
+ 0(v)
para todos los \Tctorcs tangentes v.
De b misma mZ!nera, si f es una función ck v;deres reales en E' y
es un;:¡ 1-forma. entonces ¡~, es la 1-for:Jt:t tal que
para todos los \TCtores tangentes
,¡,
V;,·
IIay tat:Jhil:n una rn:n!lTa natural de n·aluar ;•na 1-forma c¡, en un
camjw ccdorial V para obtener una función e¡,(!') de y;¡]ores reales: en
cada punto p, el yalor de </> (V) es el n {!In ero ~b (V ( p) ) . Por lo tanto,
una 1-fonna se puede con:sidcrar t;unbién como una máquina de tr;msfurnnr campos \Tctori:des en funciones ele \·alorcs reales. Si </' ( T') es
difercnciablc siempre que V lo es, decimos que ~~ es difcrcncia/Jlc. Como
sucede con los campos \'Cctoria les, siempre supondremos que estudiarnos
1-fonnas que son diferenciahlcs.
Al hacer una cmnprcb~tción rutinaria de la:i ddiniciones, Sl' ve que
<p ( Vl es lineal tanto en ,¡, como en F: t•s decir, que
y
donde
l y
g son funcione;.
Por medio de la idea dcriv:td::t dire:::cional, definiremos ;: continuación
una manera muy importante ele convertir funciones en 1-formas.
5.2 DEFIKICI<JN. Si f es Lllla función clifercrciablc de valores reales
en E', la diferencial t!f ele f es la 1-forma tal que
df(v1,)
=
vAfl
para todos los vectores t::tngcntcs v 1,.
De hecho, df rs una 1-form~l, puesto que, por definición. es una función ele \a lores reales en los \TCtorcs tangt·ntcs, y por ( 1) cld teorema 3.3,
es lineal en cada punlo p. Se ve con cLuicbd q uc df puede c1cccrminar
todas las rapideces de \·ari:tción de f en todas las direcciones dt· E\ de
manera que no debe sorprendernos que las diferenciales sc;¡n fundamentales en el cúlculo en E:.
l\ ucslra t arca es aquí clemo:,1 rar e¡ u e es~as dcfi niciom·s tan abstrae! as
llc\·:m a lns : •.·sultaclos que ya conoc:c!llOS cuando las expresamos en tl-rnliros ele coordcnacbs.
5.3 E.J J:J\IPLO. 1-frnm::s r'll E'·. ( 1) L1s clifcrcnciales d.\" ri.Yc,
de
las funcior:f"i cool(.'cnac~~'s n:11.nr:1J.. s. Por ¡¡¡cclio dci lellla 3.2, concluimos que
1- FORMAS
donde 8, , es b drlla el,, Kroncckcr (O :ci i ~ j. 1 si i e= j). Por lo tzmto,
ti z·a!or de r!··, es i!7.' :·,·,lu!" tangente or0i 1 unio v 1, rs la rorndn!r;rla i-l-sim;1
«' de \"f /'a; .··¡·, ;.,;. y no dr']L'ndr· c·n a]y;oluto dr·l ]lUl1Hl de :1;1\icación p.
2) La 1-fcrma \~ = f,d'., + [cdlc + {;ri'. . Fm·sto que ,' 1 .; e; mn 1-forma. nucstu1s definiciones no:; lc:Jn·n \'lT '-i'l(' Lunbi,;n y ":' UJ1,\ 1-forma
par:t cualesquiera funciones f" f. f:. El Yalor lll' y en un \Tctor tangcnt('
::rbitr:nio v1, e:;
El primero de C"o;los l'jemp]oc; ;w, indic:; qnr bs 1-lormas d\ 1 , dxc,
son objctn:i ;tn:tl<>f•;os :1 \ cctorcs tangcntf's de bs fun,·ioJ\C'S cnmc!f'n:1clas
naturale-s \: 1"· \ paLl lus punto;;. Desde otro mmto de \¡,:a. podemos
\Tr ri.Y,. d \'c. rf-.·, como "dua!cc;"' de los c:1mpos \Tctoriaks un;t;nios l':ltUrales [ ',. l re. F .. l k k·clw, 'f' dc:<prcwh~ inmcdiat;mwnlc ele lo dicho
anteriormente en (Ji qt•~' b funci(m d1; (U;) ticnc l'l \;llor constante l'; :.
\"etTI:Hl.'; :1 C<>illinu:1cir'm <jtL' P'"1CI:1n': c~lJn·<:;:r \()(1;¡ 1-forma ck la
m:1ncra conc1sa qw· climos Cél 2.
{; ~=
\[,(U.). Esta;; funciones
f¡,
JTI;tiJCTa concisa que djn~os e-n (?
[., s:· l!anLlll funcioucs coo¡rfnwdm
'1 •
Denzo.,-tmci,!n. Por c~cfinición, tma \ .. fo<li'!1 C'\i una función eh- YccLOl'''
tangc'nLcs: l""' lo tanto, </>y ::S f,d,; ;,er:'ln Í¡~·u:llcs ~=, y sólo si ti<'lH'n el mismo
ya]or en ca<b \TClor tang.:n1t' \ 1, =:S z·;l';(Il). Fn t'l c:¡scJ (2) del ejemplo 5.3, viu1os que
::::: f
(p'
1
,.
Por otra pa rtc,
(pi
debido
-
;1_
CJW' f;
E•,tc km:t nos cnsc!ín que m1:1 1-fo:·na c·n E'' nn es n;{,·, fj'.H' una c~­
pn··;ién f r! \ + ~: dy + /. 1: •. y ::1. l:;'mo-; ddiniclo ri;;·uros:1mcntc cs:1'i C''- ¡m·~,iPnes corno fuucicncs c:1 \·cct()rc,:.; L:tngentcs. 1 ){':Eos1r~u·(·::!c:~ a ccntinuac1ént
EL c~\LCJJLO EN EL ESPACIO EUCLIDIA:-./0
36
5.5
CoROLARIO.
Si
f
es una función diferenciable en E 3 , entonces
df
= ~ }1_ dx;.
) dxi e11 un \TCtor tangente arbiDemostración. El valor de ;E; (~/;
lema
3.2, tenemos que tfj(vp) =
trario v11 es ~ (ofj2x;) (p)u;. Por el
V¡¡[/] es lo mismo. Por lo tanto, bs 1-formas rl( y ~ (o/ jox;) dx, son
iguales.
1
O bien mediante este resultado, o bien a partir de la definición de d,
se \"C inmediatamente que
d(f
+ g) =
df
+
dg.
Por último, determinamos el efecto de d en jnorlurtos y en composiciones
de funciones.
5.6 LE :M A. Sea
cu E'1 Eutonces
fg
el producto de las funciones difcrenciables
d(fg) = gdf
f
y g
+ j'dg.
De:;zostración. Por medio del corolario 5.5, obtenemos
1
5.7 LL\IA. Sean 1: E~ --'> R )' h: H --'> n fu;JCioncs difcrenciab!e,, de
manc:a que la función comynwsL1 h (f) : E'---':-' R sea también diferenciable.
E1;tnnce'
d ( /¡ (í) ) = h'
df.
Demostración. ( Ac¡uí la prima es :;impJc¡¡;ente la derivada ordinaria,
de manera que h' (f) nteke a ser una función compuesta de E 3 a R.) La
regla habitu:ll ele 1:1 cadena para una función compuesta como es h (!) dice
2 (!~_U) l
= h' Ul 'r3_L .
--
!'X;
En con,ecuencia,
d(/z(f)) =
~~(~(!))
OXi
dx; =
~h'(f) ~of
L!X¡
dx,
= h'(f)df.
1
37
1-FORMAS
Para calcular df en una función dada 1 c;¡s¡ s1cmpre resulta más sencillo emplear estas propicdz1dcs de d, y no substituir en la fórmula del
corolario 5.5. Entonces obtenemos a partir de dj hs derivadas parciales
de f y, de hecho, todas sus derivadas direccionales. Por ejemplo, supongamos que
f=
-l)y+(::/+2)-=:.
Entonces, por los lemas :J.G y 5.7,
df
=
=
(2x
y+
2xyd.Y
+
(x"
- 1) dy + (2ydy)z
+
2yz- 1) dy
+(y~+
+(y~+
'-----------.,,---~---'
2) dz
2) dz
'---------.~
Empléense a continuación las rc·glas anteriores pZ!ra evaluar esta expresión en un vector tangente v. El resultado es
EJERCICIOS
1. Sean v= (1,2,-3) y p= (0,-2.1). Evalúcmt· las 1-formas
guientes en Pl \TCtor tangente v!l.
a) j'"dx.
b) zdy- )'!!Z.
e)
- 1) dx - dy
+
SI-
x" dz.
= ¿ f¡ dx; y V= 2; vJ';, demuéstrese que la 1-forma
luada en el campo \·ectorial Fes al función </)(V) = 2: j(c¡.
2. Si cj)
q>.
eva-
3. E\·ZllÚPse h 1-foruu r:f) = 1e de- J" d.: en los campos vectorial<";
V = xU1 + yC;, + ,:[ ·"·
4. Exprésense be; diferenciales siguientes en términos de df:
a) d(f").
b) d('Vf),
dcnclef>O.
e) d(log(1+f)).
5. Exprésense las diferenciales ele bs funcione:; siguientes en b forma
estándar 2:~ l; dx.¡.
b) tan· 1 (yjyl.
a)
6. En Gtda cZlso, calcúlese la dift:Tenciztl de f y encuéntrese b dCli\·ada
direccional Vp~fl, par?, les v 1, del ejercicio 1.
a; 1 =
b) f = xe 1r.
1) f = srn
cos
--
7. De las cxpre~cioncs s;_o;uientes ¿cuáles >:on 1-formas'•' En rada caso,~' es la
función en \Tctorcs tangentes tal que el \·alor ck ~~, en ( v 1, Ve, 1':: \ P es
a) 1' 1 - '' :·
e) v 1 jJ.~ + vcp 1 •
e) O.
b) f!¡ - jJ;,.
d)
+ )'~].
f) (1!1) ~.
En CZISO de que ,,~ sea 1-farma. cxprésclo ccmo ::::; f.¡d.Y;.
38
J:L c\LCULO EN EL ESPACIO LUCLIDIANO
8. Demuéstrese directamente, a partir de la definición de rl, el lema 5.6,
sin cmplc<lr el corolario 5.).
Ln:1 1-forma cp es cero en un punto p nwndo 1,(v1,) =O para todos
los vectores tangentes en p. Cn punto en el que >,n clifcrcnci:1l df vale
cero se lbma punto crítico de b función f. ] kmuéstresc c¡ue p es
punto crítico ele f si y sólo si
9.
~! (p l =e/
C\'
~~
(p)
(:
(p) =O.
Encuéntrense todos los puntos críticos de
1=
(
1 - x') y
(Indicación: encuéntrense las dcri\adas parciales de
cálculo de df.)
+ (1
1 por
- y'):.
medio del
1O. (Continuación). Demuéstrese que el maxnno local y l'l mínimo local
de f son puntos críticos ele f. (f tiene un máximo local en p si 1(C() :::;
/(p) para todo q cerca ele p.)
11. A \Tces se afirma que d f es la aproximación lineal ele ~f.
a) Explíquese d ocnticlo (11 que (d/) (v 1,) es la aproximación lineal
dé' f (p + V) - f (p) .
b) Czdcúlcnse los valores C';acto y aproxim;¡do de f (0.9, 1.6, 1.2) 1(1, l.:J, 1) donde 1 =
6
Formas diferenciales
Las !-formas ele E" foPJL<Il p;utf' de un sistema m;;yor que s;· llama de
fon,zas r¡;fercncial('s en E'. :\o lnblan·mos de las fom;;¡s diferenciales con
d ri~or que cmplc:m10s p:1ra las 1-fmm;¡s, debido a CjtH' sólo cmple::u-eums el
sis~cma compkto en la sección i3 del capítulo 11. Sin ser precisos, diremos
que una [o; IN! difn n·r·:"ai C'll K· f"i una c:•. prc;,ión (j\L' se obtiene por medio
de b adición ,. );¡ multiplicación de f Ll!:cioncs de Ya lores rc:1!c·s y las difcl"('tH ¡~,¡,., rl'. 1 • ·h
r/\: el(' ];;, fut~cioncs coordé·nac1a;; natur:ckc. de E::. Lns
dos o;Jcndotcs :·¡· ri.'~<·n P''r l;;s lryC's asoci;ttÍ\ll y di:;trilmti\·ll h:1bituales;
sin cmb:ngo, la multiplic:wión no es conmuLJt i\ :1. E;l lu¡;ar de nlo. obcdl'cc 1·1
E'.t;:
'. i ~--=: :3).
i
1
n ·.:: h
!; '~ ¡ ~-·lJ' ¡_!
1
\
'
'·(
'
(. ·~
~-
/. L:
(
: ' '
{ ' j '· '.
¡. ); ~ { . :
~l
)
1
( '' '
... \'J. 1 : "
: ', • (
(
~ l1 ( '
(
¡
i!
1/ \
1
~-=--~ f).
pl l(';
39
FORMAS DIFERENCIALES
dx; dx; = - dx; dx;.
Si cada sumando de una forma diferencial contiene jJ elementos dx; (p =
O, 1, 2, 3), la forma se lbma jJ-fonna, y 'e dice que tiene grado jJ. Por lo
tanto, si pensamos en términos ele dx, dy, d:::, encontramos que
Una O-forma es simplemente una función difercnciablc f.
Una 1-forma l'S una expresión f dv: + g dy + h rlz, corno vimos ~n la
sección anterior.
Una 2-forma es una expresión f rlx dy + g dx d:: + h rly dz.
Una 3-forrna es una expresión f dx dy d::.
Ya sabemos cómo se suman las 1-formas: simplemente se suman los
coeficientes correspondientes. Es así como en la notación indicada tenemos
¿ [;
dx;
+ ¿ g;
th;
¿
=
+ g;) dY;.
(f¡
La regla correspondiente se cumple en el caso de las 2-formas o de las
3-formas.
En el espacio euclidiano tri dimensiona 1, todas las p-formas en las que
jJ > 3 son cero. Esto es consecuencia de b regla de alternación. pues un
producto de más de tres dx; debe contener algún elemento rcpr~tido; pero
ello significa que vale cero, corno ya hemos dicho. Por ejemplo, dx dy dx dz
= - d r dx dy d:: = O, puesto que dx dx = O. Como recordatorio de que
debemos emplear la reg-la de alternación, denotaremos esta multiplicación
ron la tilde del acento circunflejo A .'i' (Sin embargo, no nos molestaremos con la tilde cuando solamente intervengan productos de dx, dcy, dz.)
6.1 E Jl l>l!'LO. Cálculos ele productos tilde ( 1). Sean
</> ~-0
.\
d.\ - :V dy
Entonces
1)
A
V'=
,
(v:dx- cydy)
1\
(zrfy
=
y
+
.\::
.n!z)
d\ {Jy
+
.1"
dx d:-
r: r!y r!\
- yx dy d.:.
!'ero
dy dx
dx dx =O,
=
-
dx dv.
l'c;r lo tanto,
<}> A
'Í
=
y:: dx tFy
+
_y::
dx rlz - xy dy d::.
En general, el producto ck dos 1-formas es una 2-forma.
2 "¡ s('~m 1) y ~~ bs ] -formas an\('l iorc5. y sea
\\;r1·,jL\' ;-.,('
~:,·,11
(: ( j
,
¡;ucde cn~::-;itb ~·;:;r
;~~·l'Ít·li:l~l c':Jt'':~·n
, , :1 ¡\( ; 1 :.. ';(
r : 1;
c:.;t:'
:,r : .1 ·~r':l~id,,
1 : ;-! ·, •
1
pr\'·LlH'~íl Cfi¡Jlil
~-,.1'1~1 (¡e fl11;1,Í{ll1
e; r ir,
el pr.:Jtluctu
parti('ttbr
, ·;' ~.' r
(':...:l'i
ior .::~·:·;¡e; ,J,
('q'tl\" ;jf':lt"'
la
40
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
Entonces
rp
(} 1\
1\
y=
)'Z~
dy dx dy
+
x 2z dy dx dz - x;•z rly dy d::.
Puesto que dy dx dy y dy dy d:: contienen cada una repeticiones, las dos
valen cero. Por lo tanto,
(j 1\
.p
1\
y=
-
x 2 z dx dy dz.
3) Sea <}> como b hemos dado, y sean '1} las 2-forma y dx dz + x dy dz.
Si omitimos las formas que contienen repeticiones, nos quedamos con
1>
1\ 17 = .1 2
dx dy dz - :/ dy dx dz
+ )'
=
2
)
dx d)' dz.
En estos ejemplos debe quedar claro que el producto tilde de una
p-forma y una q-forma es una (p + q) -forma. Por consiguiente, un producw es automáticamente cero siempre que p + q > 3.
6.2
LEMA.
Si c1~ y
y son
1-formas, entonces
y = - .¡;
</> 1\
1\
1>.
Demostración. Escribamos
Entonces, por la regla de alternación,
En el idioma de bs formas diferenciales, el operador d de la definición 5.2 convierte una O-forma f en una 1-forma dj. Es fácil ¡~cn:,r:clizar
a un operador (que tambiL:n se denota por d) que convierte una p-form:1
?J en una (jJ + 11-forma d?J: no hay mús que aplicar la d (de la dcfiniciÓ;¡ :!.2) a bs funciones corficientes de ?J· Por ejemplo, tenemos a conti1m:1ción el caso /' = l.
6.3
Si \) e~ :¿ f; d'., e:s
,¡, cs la 2-forma d7, = ): df;
una 1-forma en E", la derii'ada
DLaKICllJN.
nterior ele
A rl,\'i·
Si desarrollamos la definición anterior por medio del corobrio 5.5,
obtendremos la siguiente e .interesante fórmula ele h derivada exterior de
1)
rls'> = { ~
\r:"r 1
-
=
f1dx,
+ fcdx"
-1- f:;dx 3 :
2
fcx1'-) dxl dxc + (~I ··Cx~
/ dy, dxo +
1)
1
2
r,'X 1
_\
_.
"
;'\o es necesario que el lector memorice csta fórmula: resulta lllt'JOr apliC<Il' en cada caso b definición. Por ejemplo, supongamos que
41
FORMAS DIFERENCIALES
<P
= xy dx + x" dz.
Entonces
d<j> = d(xy) 1\ dx + d(x") dz
(ydx + xdy) 1\ dx + 2xdxdz
= - x dx dy + 2x dx dz.
Se vcrifica con facilidad que la derivada exterior general disfruta ele
la misma propiedad de linealidad que tiene el caso particular ele la definición :!.2; es clecir, que
d(acl-~
+
b<f) =a dcp
+
b dtj;,
donde <P y ,Y son formas arhitrari~:s y a y b son nCml('ros.
La derivada exterior y el producto tilde funcionan juntos de manera
muy agradable.
f y g funciones, cp
1) d (fg 1 = df g + f dg.
2) d(fc¡,) = df 1\ </> + fdc¡,,
3) d(q) 1\ ¡j;) = d~) 1\ tj;- ,¡, 1\ d.p. t
6.4
TEOREMA.
Sean
y
y
1-formas. Entonces
Demostración. La primera fórmula no es smo el lema :J.6. La hemos
agregado aquí con el fin de que se aprecie el parecido de familia de bs
tres fórmulas. La demostración de la segunda forma no es más que una
variante sencilla de lo que se hizo con la tercera; por lo tanto, sólo demostraremos la última.
Caso l.
<p
= f dx, t[· = g dx. Puesto que
~b 1\
y=
jr;rf.\rfX = 0,
tendremos que clcmcstrar que el miembro derecho ele la ecuación también
\'ale cero. Ahora bien,
riso = df
1\
2(
dx = ~=- dy dx
(
)'
+
2f . 1
~·
(
::
ru
1 '".;
en consecuencia, cada término ele dcp 1\ .¡; tiene un dx repetido. Por consiguiente, ds·> 1\ 0 = O, y, ele la misma rnaner:c, e¡, 1\ dy = O.
Caso 2. e¡, = f dx, y = g dy. Por medio de la fórmula ele dq, que
:ccztbamos ele c:Llcular, <'htenemos
·i· Como suele suceder. la multiplicación domina la suma o la subslracción, ele
ma:1cra qnc hay que leer esta expresión como (<!~, 1\ .¡,) - ( q, 1\ d..¡,).
42
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
d~+,
A
V=
(~t
dy dr +
C}'
cf dz dx)
~!
O+
g dy
A
();:
;::- g d:: tlx dy
2/
g -,- dx dy d::.
=
r'2
¡_ ,:
De la mrsma manera.
cp
A
dy
f dx
=
A
(~.~\ rfx dy +
cg dz dy)
()::
(
f
=
~r,
..,~ r!.\
rl:: dy
A d¡J; =
(g
r_
?v
=
f ·• ri.Y dy dz.
-
2z
Por lo tanto.
dcp
A ¡f; -
cp
a¡
::.,cz
e" f )
+ -;;"cz
dx dy dz.
Pero
cp
A
¡f¡
=
fgdxdy,
de rnarwra que obtenernos
d(cp
A ¡f;) =
d(fg) dxdy
=
() (/ r;)
~,L
dzdxdj'
(•Z
=
(ij
- g
( Cz
+ f !:r;)
; . __ dx dy dz.
( ::
En consecuencia, hemos demostrado la f/mnula
fll
este caso.
Ca.1o 3. Este es el caso gFneral. A partir de los c1sos 1 y 2 sabemos
que la fórmula se cumple siempre que 'P y
son "simples", es decir, de la
forma f du, donde u es .\,y o ::. Puesto que toda 1-forma es la suma de
1-formas simples, el caso general se clesprenck de la lincaliclacl de d y
de la ley clistributi\a cld producto tilde.
v
1
C na manera ele recordar el signo ele mcnm que intcrYicne en la fórmula
3 del teorema 6.4 consiste rn imaginar que d es tlna 1-forma. P:w:.t lleg;¡r
a y, debernos intercambiar con ~~) los lugares: por lo tanto, el signo de
menos es conc.ccucnte con el lenu 6.2.
L:1s formas diferenciales y los conceptos asociado~, de producto tilde
y dcti\ C\cb exterior, comtituycn un medio de expresar n·lacioncs bastante
ccJJnplicaclas de manera senci!L1 y metódica. Por cjcmp:n, como se ve por
·,u demostración. b fórmula nítida
implica alg;unz;o; rcL:c:'Jill"' lJaq:mtc cquÍ\"l)Cas cnlre deri\ ;Hbs parciales .
ln\Tnción <~e l:¡~ fo;'ln;¡:-:.;. era nc . . T::ario b¿tit1lL-n~ con e<;¡'" 1 ('!a-
. \ntc:, {];· l,¡
( !OtH':;
!1
'illt'
1.
·¡
l:t
t
-r: ntchos problc:•1:1-.;
f'c.>l'llPlLl g•'l~cr:¡J.
:1
i..l:tdc~.:
en Lt
;'CUL: lidacL :1 piicar:1os ~"¡ 111 p1C'-
43
FORMAS DIFERENCIALES
Hay una di\crsidacl de aplicaciones intercs:mtes en la obra de Flandcrs
[1]. Más adelante nos Yaldremos de bs fórmulas diferenciales para expresar
las ecuaciones fundamentales ele la geometría.
EJERCICIOS
q> = )'Z dx + r/,:, .¡; = sen z d.\ + cos z r/y, ~ = dy + z d.:. •Encuéntrense las expresiones estándar (en términos de dx, dy, · · ·, ) de
a) q> 1\ <f;, ~~ 1\ t, $ 1\ </> .
b) dcp, dy, dt.
1. Sean
2. Sean <j> = dr
y ¡f; = z dy. Verifíquese la fórmula de Leibniz (3) del
teorema 6.4, en este caso con el cálculo separado de cada término.
3. Demuéstrese que en cualquier función
d(f dg) = df 1\ dg.
f,
d ( df)
=
O. Dcdúzcase de ello
4. Simplifíquensc las formas siguientes:
e) d(fdg 1\ gdf).
a) d (f dg + g df).
b) d{(f-g)(df-1-dg)}.
d) d(gfdf) + d(fdr.;).
S. Para cualesquiera tres 1-formas
trese que
cp;
=
¿J J; i
f ¡:¡
rl\J ( 1 -5 i
< 3), demués-
'¡
/"" i
dx, dx 2 dY:~.
f:cl !
6. Si r. {} y z son las funcion(·s coordenadas cilíndricas en E", entonces
x = r cos ,~·.y = r sen{), z = z. Calcúkse el elemento volumen rlx rly dz
en coordenadas cilíndricas. (Es decir, exprésese d.\ dy dz en términos ele
las funciones r, {}, z y sus diferenciales.)
7. En una 2-forma
'7
=
/
rh dy
+
g rh· d:
+
h dy rlz,
~.t·
ddinc la dnúmda ntcrior dr¡ como la 3-form;l que se obtiene al
reemplazar f, g y h por sus diferenciales. Demuéstrese que, para cualquie~ 1-fonna </), d(rl1>1 =O.
Los ejercicios 3 y 7 nos cnscíian que d" = O, es d!·cir, para cu~d(]UÍer
fmma E, d(
=O. (Si .~es una 2-fonrn cniO!HTS d(d~) =O. puesto
que su gTado c,:cecle de 3.)
8.
Ll au1Í¡,:,¡,
f4>
,-'1'1
tu,oial
c]ú.•:ic(>
cYi!:l el r·mplco de formas difc'cncialcs en
n;cdiantf' l:t ('í;1~\Tr:-.ir':n de } --ronn¡1s \. ~-Corn1a~) en c;unpn~
nno a
Í,
rl \ 1
llllü:
\'(_'!
tori~-dc·-
44
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
El análisis vectorial emplea tres operaciones básicas que se basan en la
diferenciación parcial:
El gradiente ele una función f:
grz:d f
=
2f
:¿ --U;.
El rotacional de un campo yectorial V
=
:S fJ ';:
La divergencia de un campo Ycctorial V =
d.lV.
:¿f.¡ U¡:
v ="
a¡,
.:,. -::; ..
ox,
Demuéstrese que ]as tres operaciones se pueden expresar por medio
ele las eleri\·aelas exteriores de la manera siguiente:
a)
df
.~ll, gr:~d
f.
b) Si rp .'_i¡, V, entonces ds~ ,--· rot V.
e) Si r¡ ~ l, V, entonces d,¡ = ( div V) dx dy dz.
9. Sem1
f
y g funciones ele valores reales en E-1 . Demuéstrese que
dj
A
dg
=
dx dy.
Esta fórmub aparece en el c(tlculo clcn1cntal; dnn;¡{:qrc se que implica
la regla ele alternación.
7 Mapeos
En esta sección examinaremos las funciones de E" en Em. Si n = 3 y
m = 1, entonces una función L!l es sill!plcmenle una función ele valores
reales en E'. Si n = 1 y m = 3, entonces esa función es una curva en E".
Aunque nuestros F'Stdt~;dos qued~·r(m enunciados para valores arbitr:uios
ele r;¡ y n, nos intcrcs:•n sobre todo los tres casos:
La observación fundamental acerca ele una función F: En--¿ Em es que
se b puede describir c:ompletamr'nte por m funciones de \·alares redes en
En. (Esto ya lo \·irnos en la sección 1 cu;:¡ndo n = 1, m = 3.)
7.1
DFFI;-,-rc:rÓN.
Dada una función F: En-> E'", denotemos por [ 1 ,
[e, , · ·, f,, las funciones en En de Ya lores reales tales que
45
M APEOS
F(p)
=
(fl(p), fe(p),- · ·, fm(P))
para todos los puntos p en E". Estas funciones se llaman funcirmes coordenadas euclidianas ele F, y ponemos F = ([1, [e, · · ·, fm).
La función F es difcrenciaiJle sit·mpre y cuando lo sean, en el sentido
habitual, sus funciones coordenadas. Lna función diferenciable F: En~ Em
se llama mapeo de En a E"'.
Adviértase que las funciones coordenadas ele F son las funciones compuestas f; = x; (F), donde x1 , • • · , Xm son las funciones coorden:cdas de E"'.
Podemos describir los mapeos de muchas maneras diferentes. Por ejemplo, supongamos que F: E 3 ~K' es el mapco F = (x 2 , yz, xy). Por consiguiente
F(p) = (x(p) 2 ,y(pl::(p),x(p)y(pl)
Ahora bien, p =
(/1 1,
p
2,
para todo p.
jJ 3 ) y, por h definición de funciones coordenadas,
En consecuenCia, obtenemos la siguiente fónnub ele operar punto por
punto en relación con F:
En particular, tenemos que
F(1, -2, O)
(1,
o,
-2),
F(-3,1,3)
(9,3, -3),
y así sucesivamente.
En principio, se puede deducir la teoría ele las cun·as de b teoría
general ele los mapeos. Pero las cmTas son relativamente sencillas, mientras
que los mapeos, aun en el C<tSO E 2 ~ E 2 , pueden resultar bastmtte complicados. Es por ello que invertiremos el proceso y usaremos curYzts, en cada
etapa, para llegar a entender los mapeos.
7.2 DEFINICIÓN. Si e: I ~En es una curva en E" y F: En~ E"' es un
mapeo, entonces la función compuest:c (J = F (a) : I ~ E m es una cun·a
C'l1 E m que se llama imagen de a bajo F (figura 1.14).
{3
Figura 1.14
46
EL c,\rx:uLO EN U. ESPACIO El:CLIDIANO
7.3
EJEliii'LO.
~Iapeos
F
1) Consideremos el mapeo F: E'-> E:: tal que
(X - )',
=
X
+ )',
2,:;) .
Entonces, en términos de las operJciones punto por punto.
para todo ji,, f!c, l' ,.
Para darse una idea acertada del cornport:nnicnto de un m:1¡wo J'lc'cliantc
cálculos de sus valores en un número finito de ¡mn:os d t:d m:qJ:'O ha ck
'er muy simple. Pero esL1 función n h:Jst;;ntc 'i1np!e; se tnt;, ele una
transformación lineal de E:: a E'. Por lo t:mto. graci;,s a un conocido teorema del álgebra lineal. F ctut>da cnmpll'Llm,·ntc detc·rmin"d:1 pr•r ';u,.
valores en tres puntos (line;¡lnwnte indcpcr:dirntes). que podemos tom:n
como los jJlu;tus unidad
u,= (1, O, O)
u.
u,=(O.O,l).
(0,1.0)
2) El mapeo F: E"--)E" t:tl que F(u,z•) =(u"- z•\2uu). (Aquí u\
z· son las funciones coordenadas de E".) Para analizar
naremos :;u efecto en la cuna a ( t) = ( r cos t, r sen t ).
Esta curva hace un viz1jc en el sentido o¡mc'oto al ele bs
alrPdedor de un círculo de radio r (con centro en Pl
nnagen es
(3(t) = F(a(t)) = F(rcost.rscnt) =
dfJJidc O "S t
S
(r~cos"t
--
este mapco. examiclond(· O S t :?' 2,-.
m::mecillas del reloj
orig-en). T,a cun'a
r~senét,2r"costsenl),
2,-. Por medio de b~: idcnticbd, s trigonométricas
cos 2t = cos't - sen"!
sen 21
=
2 sen t cos t.
enrontr;1mos para (3 = F((\') la fórmula
(3 ( t)
=
(
r" e os 2 t. re sen 2 t) ,
en la qw· O ;% t S 2,-. Esta curva cmprcnclc do.\ vi;1jcs ('!1 el :-cntido opuesto al c!c bs lllanecillas del reloj alrededor del círculo de radio r' (con
centro en el origen 1 (figura l. Li).
Es así como el efecto ele F consi5tc' en envolver llanamente el plano
E" alrededor de sí mismo dos Ycccs; el ongr·n queda fijo. puesto que
'U
Figura 1.15
,
47
;'>!APEOS
F(O, O)
= (0, O). En este proceso, cada círculo de radio r queda dos veces
envurlto alrededor del círculo de r:1dio r".
En C:!cb uno ele los nue\·os objetos (jlll' hemos definido en c'tf' c:1pítulo.
hemos pasado a cldini;· una icka adecuada de la dcri\·acla de ese objeto.
Por ejemplo, h "dcrivacb" de una cun·a a es su vp]ocicbcl e'. :\ partir
<L la idea ele la \Tlociclad dl' una cul":::. definiremos a continnación la
deri\ ada F,, ele un mapco F: E" ---7 E'·. La F,. c:erCt m1a funcÍÓll c~qc asigne
a cada vector tangente v :' E" en p un \·ector tan~;·entc· F,.(v) a Em en
F(p). Obtenemos F:.(v) por medio del proceso siguicntr·: el vector tangente v es la vehcicbd inici:ll ele la e un :1 ct 1 1) = p + lv, donde, ele
:u:uPrdo con d comc·nt;uio 3.5. abrcvialliOS c:onsistcntcuwnt(' v¡l a simplemente v. Ahora bien. la Imagen de ct bajo el mapco F es la curva (5
con la propiedad dP que
f3(t)
=
F(a(t))
=~
F(p
+
lv).
Definimos F (v) como la \·elocicbcl inicial f3' (O) ele p (figura 1.161.
Al resumir este proceso. tenemos la definición siguiente.
7.4 D:,FrNIC:JÓN. Sea F: E" ---7 E'" un mapco. Si v es un \crtor tangente a E" en p, sea F ( v) la \docicbd inicial de b cun·a t --"> F ( p + tv)
en E'". Lz1 función rcsul tan te F,. (de vectores tangentes ele E" ;: \·cctores
Lmgcntes ele E"') se llama nw¡'1a r!e ticriz·arlm F,,. ele F.t
f'S
Ach-iértasc que la posición inicial t = O de la curva t --"> F ( p + tv)
F(p). Así. por la definición 4.3, el punto de aplicación de su Hlocidad
Figura 1.16
-
inicial es F ( p). Se de,prende de la clf'finición, entonces que F. transforma
un vector Lmgcnte a E" en p en un \Tctor tangente a E'" en F ( p).
l'or cjnnplo, vamos a ralcubr el mapa de derivadas cid lll;lj)l'O
F(u, v)
t
=
(u"
v", 2w·)
Es decir, la dCl'ivada del mapeo F es un· mapco F al que llamaron, por
del idiorna_ '"n1apa el:_. dcri\·adas'' ( derú·atit·e nzajJ) en lugar de •·rnapen de deri\·ac.;J.". (:-\ota del traductor.)
c~;l1\';•:tif'nci~'s
48
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
del mCiso (2) del ejemplo 7.3. Para el vector tangente v en p tenemos
por lo tanto,
F(p + tv)
=
(
(jh + tz·, )" - (Jh + tuc) ", 2 (Jh + tz•1i
+
tnc)).
A medida que t varía, esta f Ó1mub nos describe b curva en E:. que, por
definición, tiene la velocidad inicial F.<(v). ,\1 diferenciar las coordenadas
anteriores con respecto a t (definición 4·.3), obtenemos
en F(p).
7.5 TEOREMA. Sea F = (/1 , fe, · • ·, fm) un mapeo de En a Em. Si v es
un vector tangente a En en p, entonces
en F(p).
Por lo tanto, F,.(v) se determina fwr las dcriz·adas v[f¡J de las funciones coordenadas de F con respecto a v.
Demostración. Con el fin de ser concretos, tomaremos m = 3. Dado
v en p, nos referimos a la definición ( 7.4) de F.,, y tomaremc .; (3 como
la curva
(3 ( t) = F ( p + tv) = (f d p + tv) , f 2 ( p + tv) ,f:¡ ( p + tv) ) .
Por definición, (3' (O) = F ( v) . Según la definición 4.3, para obtener el
vector de velocidad (3' (O), habremos de tom:1r bs derivadas en t = O de
las funciones coordenadas f¡(p + tv) de (3. Pero (dfdt) (/¡(p +tv)) lt=o
es precisamente v[fi], donde hemos omitido, como es habitual, el punto
de aplicación p. Por consiguiente,
F*(v)
=
(v[fl], v[fz], v[f,l]) iJ(ol.
Pero, por la definición de (3,
(3(0)
=
F(p).
Fíjese un punto particular p de E". Como ya hemos dicho, cada vector
tangente v ;:¡ En en p queda tr:1nsfornuclo por F.,, en un vector tangente
F(v) :1 E"' en F(p). Es así como para cada pun;o pele En, el mapa ele
derivadas F.,, da lugar a la función
a la que llamaremos mapa de derivadas de F en p. Compárese esto con la
situación correspondiente en el cálculo clerrwntal donde una función cliferenciable f: R.....¿ R tiene una función cleri\·ada f': R -:> R que da en cada
punto t ele R la derivada f' (t) de f en t.
49
M APEOS
Los vínculos que unen el cálculo y el álgebra lineal son más estrechos
de ]o que se podría esperar de un curso convencional de cálculo. Uno de
los vínculos significativos está constituido por el
7.6 CoROLARIO. Sea F un mapeo de E" a Em. Entonces en cada punto
p de E", el mapa de derivadas F,,JI: Tp(En) ---;. TF(p) (Em) es una transformación lineal.
Demostración. Si v y w son vectores tangentes en p, y sr a y b son
números, debemos exhibir la validez de la igualdad
Por medio de la primera afirmación del teorema 3.3, esto es una consecuencia sencilla del teorema anterior.
La linealidad de F*P constituye una generalización del hecho de que
la derivada f'(t) de f: R---:> R es la pendiente de la recta tangente a la
gráfica de f en t. En efecto, tenemos que para carla jJUnto p, F:¡¡ es la transformación lineal que mejor se aproxima al comportamiento de F en la cercanía de p. Esta idea se desarrolla completamente en el cálculo avanzado,
donde sirve para demostrar el teorema 7.1 O.
Puesto que F,,P: Tv(E") ---:> T P(pl (Em) es una transformación lineal,
procedemos razonablemente al calcular su matriz con respecto a las bases
naturales
U1(p), · · ·, Un(P) para Tv(E")
U 1 (F(p)), ···, Um(F(p)) para Tr(p) (Em).
Esta matriz se llama matriz jacobiana ele F en p.
7.7
CoROLARIO.
Si F = (/ 1 ,
F*(Ui(P))
=
• • • ,
fm) es un mapco de En
"' a¡i
~ a~~ (p) Ui(F(p))
1
a
E"', entonces
(l:=::;j:=::;n).
En consecuencia, la matriz jacobiana de F en p es ( (ofijoxi) (p)) 1 o:¡:::m.
n"'n.
Demostración. Tómese v = U i (p) en el corolario 7 .6. Puesto que el
vector unitario Ui(P) aplicado a f¡ es simplemente (of;joxi) (p), obtenemos
F,.(Ui(p)) =
(~0:_
(p), ...
OXj
-
}f!'!:.
(p)) =
OXj
~ ~fi
i=l OXj
(p) Ui(F(p)).
1
Haremos la abreviación estándar:
F.(U·) =L.,
<·
J
i
of;_ O·
ax
j
"
donde Uj y of¡foxj se evalúan en p, y Uj se evalúa en F(p). Este resultado
nos hace ver que el mapa de. derivadas de F queda completamente de ter-
50
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
minado por las derivadas parciales de sus funciones coordenadas. Por
ejemplo, consideremos el segundo mapeo del ejemplo 7.3. Sus funciones
coordenadas son f = u 2 - v" y g = 2uv. En consecuenCia,
a¡
a¡
ov
og og
eu Ov
[2u -2zl
2v
2uJ
Ou
De esto se clesprcnele que la matriz jacobiana ele este mappo Pn el
punto p = (p 1 , jJJ es
7.8 TEOREMA. Sea F: En__.¿ Em un mapeo. Si (3 = F(a) es la imagen
en E"' de la curva a en En, entonces (3' = F, (a').
Este teorema afirma que F,. conserva las z•e/or:idades ele las curvas,
puesto que para cada t, la velocidad (3'(t) de la curva imagen es la imagen, bajo F,., de la velocidad a' ( t) de a.
Demostración. Para que haya más claridad. tomemos m
bien, si F = (!1 , fe, fa), entonces
=
3. Ahora
f3 = F(a) = (f 1 (a), /e( a), h(a)).
Por consiguiente, las funciones coordenadas de (3 son f3i
teorema 7.5,
Fr.(a'(t))
=
(a'(t) [!1 ],
=
f i (a) .
Por el
a'(t) [/:]).
Pero s1 aplicamos el lema 4.6, encontraremos que
a
,
d(fi(a))
(t) [Ji] = ~---- (t )
.
dt
Por lo tanto,
1
F.: (.a ( t) )
=
(~1
~2
~3
-;lt ( t)' dT (t)' dt (t)
)
.
Además, el punto de aplicación de este vector tangente es F(a(t))
es, en consecuencia, precisamente [3' ( t) .
=
f3(t);
1
De la misma manera en que se emplea la derivada de una función
para obtener información acerca de la función f, se puede emplear el mapa de derivadas F:. en el estudio ele un mapco F. La investigación detallada de estas cuestiones corresponde al cálculo avanzado; nosotros
f: R...-¿ R
51
MAPEOS
no haremos más que dar dos definiciones fundamentales que necesitaremos en nuestro trabajo posterior.
7.9 DEFINICIÓN. Un mapeo F: En~ Em es regular cuando para cada
punto p de En el mapa de derivadas F*P es uno a uno.
Puesto que cada Fp es una transformación lineal, podemos aplicar
los resultados estándar del álgebra lineal para concluir la equi'lalencia
de las siguientes condiciones:
1) F.:-11 es uno a uno.
2) Si F,,(vp) =O, entonces Vp = O.
3) La matriz jacobiana de F en p tiene rango n (dimensión del dominio
E" de F).
Por ejemplo, el segundo mapeo del ejemplo 7.3 no es regular. Pero la
condición de inyectiYiclad (de uno a uno) se ausenta solamente en un
punto, que es el origen. De hecho, los cálculos inmediatamente anteriores
al teorema 7.8 nos hacen yer que su matriz jacobiana tiene rango 2 en
p =/=O, y rango O en O.
Si un mapeo tif·ne mapeo inverso, se llama difeonwrfismo. Por lo tanto,
un clifeomorfismo es necesariamente uno a uno y sobre, aunque un mapco
que se:\ uno a uno y sobre no necesita ser clifeomorfismo (ejercicio 11).
Los resultados de esta sección también se aplican bien a los mapeos definidos solamente en conjuntos abiertos de E". En particular, podernos
hablar dd clifcornorfismo de un conjunto abierto de E" a otro.
Vamos a enunciar, sin demostrar, uno ele los resultados fundamentales
del cálculo a\·anzado.
7.1 O TEORLMA. Sea F: E"~ En un m apeo con la propiedad de que
F:.P es uno a uno en un punto p. Entonces hay un conjunto abierto Q[
que contiene a p tal que la restricción de F a Qí es un difeomorfismo
Q{ ~
sobre un conjunto abierto
Este teorema se llama de la función inversa, pues afirma qur~ el m:1peo
restringido
~
tiene un rnapeo inYerso o;~
La demostración
se basa en la idea de que en puntos p + .tlp muy cercanos a p, F(p + 6p)
vale aproximadamente F(p) + F(.t!.p). Puesto que los espacios tangentes
en p y en F ( p) tienen la misma dimensión, se concluye que la tiansforrn;¡ción lineal uno a uno F,,P tiene in\·ersa; por consiguiente, también la
tiene F:}, (en al cercanía de p) .
ru o;
ru.
EJERCICIOS
1. Si F es el mapeo F = (u"- u 2 , 2111.>) del ejemplo 7.3, encuéntrenst'
todos los puntos p tales que
a) F(p) = (0, 0). b) P(p) = (8, -6). e) F(p) =p.
52
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
2. El mapeo F de! ejercicio 1 transforma la recta horizontal u = 1 en
la parábola u_,.F(u, 1)
(u 2 y v = 1, y sus imágenes bajo F.
1,2u). Trúcense las rectas u= 1
3. La imagen F(S) de un conjunto S bajo un mapeo F consiste en todos
los puntos F(p) en los que p está en S. Si F es el del ejercicio 1,
encuéntrese la imagen ele cada uno de los conjuntos siguiei1tes:
a) La banda horizontal S: 1 < v < 2.
b) El semidisco S: u~ + v~ ~ l, u =:::: O.
e) La cuña S: -u < v < u, u > O.
En cada caso, exhíbanse juntos el conjunto S y su 1magen F(S) en
el mismo dibujo.
(Indicación: empiécese por encontrar la imagen de las curvas frontera de S.)
4. a) Verifíquese que el mapa de derivadas del mapco ( 11 del ejemplo 7.3
se determina por
(Indicación: trabájese directamente a partir ele la definición ele nwpa
de derivadas.)
b) En general, si F: En___.,. Em es una transformación lineal, demuéstrese que
5. Si F
=
(f 1 ,
• • ·,
fm) es nn mapeo ele E" a E"', escribinws
puesto que, por el teorema 7.5,
Encuéntrese F,,, para el mapeo F = (x cos y,
calcúlese F,,P (Vp) si
a) v = (2, -1,3), p = (0,0,0).
b) V = (2, -1,3), p = (2,71'/2,..-).
.Y
sen)', z) de E" a E 3 y 1
6. ¿Es regular el mapeo del ejercicio anterior:'
7. Sean los mapeos de E 2 a E 2 F = (! 1 ,
f2 )
y G
= (g]J g 2 ). Calcúlense
las funciones coordenadas euclidianas de la función compuesta GF:
2
___.,. E
y demuéstrese que también es un mapeo.
E2
53
RESUMEN
8. En la definición (7.4) ele F,,(vp), demuéstrese que se puede reemplazar
la recta por cualquier curva a con velocidad inicial Vp-
9. Demuéstrese que un mapeo F: En--:> E"' conserva las derivadas direccionales en este sentido: si v 11 es un vector tangente a E" y si g es una
función difermciable en E"', entonces F,,(vp) [g] = vp[g(F)].
10. Sea F = (!1, / 2) un mapeo de E 2 en E 2 • Si para todo punto q de
E" se tiene que las ecuanones
tienen una solución única
demuéstrese que F es
1mo
a uno y sobre, y que F- 1
=
(g 1 , g 2 ).
11. (Continuación). Demuéstrese que, en cada caso, F es uno a uno y
sobre, calcúlese la función inversa F- 1 y determínese si F es un clifeomorfisrno (es decir, si F- 1 es diferenciable) .
a) F = (ve", u).
b) F = (u", v - u).
e) F = ( 1 + 2u - 2v, 4 - 2u + v).
12. Sean F: E"--:> E"' y e: E m--:> EP mapeos.
a) Generalícense los resultados del ejercicio 7 a este caso.
b) Si a es una curva ele En, demuéstrese que ( CF) ,,, (a') = G,, (F~
(a')). [Indicación: (GF) (a) = C(F(a)) .]
e) Dcclúzcase que ( CF) ,,, = G,F,,: el mapa ele derivadas de una composición de mapcos es la composición de sus mapas de derivadas.
13. Si f: R-:. Res una función cliferenciable en la recta real R y de valores reales, demuéstrese que f'(vp) es el vector tangente f'(p)v en
el punto f(p).
8
-
Resumen
A partir de la idea familiar ele las funciones de valores reales, con el auxilio
del álgebra lineal en cada paso, hemos construido una cliversiclacl clr: objetos matemáticos. La idea fundamental ele vector tangente nos condujo al
concepto ele campos vectoriales, cuyos duales son las 1-formas, que a su
vez nos han llevado a las formas diferenciales. Las ideas de curva y de
función clifercnciablc se generálizaron a las de un mapeo F: E"--:> Em.
54
EL CÁLCULO EN EL ESPACIO EUCLIDIANO
A continuación, tenemos que a partir de la idea habitual de la derivada de una función de valores reales, hemos pasado a construir operaciones
adecuadas de diferenciación para estos objetos: la derivada direccional
de una función, la deri\'ada exterior de una forma, la nJocidad ele una
curYa, el mapa de deri\'adas ele mapeo. Todas estas operaciones se recluccn
a derivadas ( ordinari:1s o parci:1les l de funciones coordenadas ele \alores re:1lcs, :1unque es digno de notar el hecho ele que en la m;;yorb de
los casos en las definiciones ele estas operaciones no intern~nían las coordenadas. (Esto se pudo haber hecho en todos los casos.) En general, bs
operaciones de diferenciación han exhibido de una u otra manera las propi~Cclac!C's lineal característica y de Leibniz de la diferenciación ordinaria.
Es probable que la mayor parte de estos conceptos h;1yan resul1;1do
ser familiares para el lector, por lo menos en algunos casos especiales. Pero
nos hemos provisto de definiciones cuiclaclosZls y ele un catálogo ele propiedades básicas que nos capacitarán para dar cmnienzo a nuestra exploración
de la geometría clifer~Cncial.
CAPITULO
11
Campos de sistemas
de referencia
Se puede decir que la geometría se inicia con la medición de distancias
y de ángulos. \'eremos que es posible deducir la geometría del espacio
euclidiano del jnoducto escalar, que es el producto interior natural en el
espacio euclidiano.
t;na buena parte de este capítulo se ha dedicado a la geometría ele
curvas en E". Insistimos en este terna no solamente por su importancia
intrínseca, sino también porque el método fundamental con que se investigan las cur\·Zls ha comprobZJdo su efectivicbd en toda la geometría diferencial. Se estudia una curv0 en E' al asignar a c0da punto un determinado sistr'ma de referencia, es decir, un conjunto de tres vectores unitarios
ortogonales. La tasa de cambio ele estos vectores a lo largo de la curva se
expresa a continuación en términos de los mismos vectores por medio de
las célebres fórmulas de Frenet (teorema 3.2). En un sentido real, toda la
teoría de las curvas en E-1 no es más que un corolario ele estas fórmulas
funcbmentales.
::\fás adelante emplearemos este "método ele sistemas móviles de referencia" para estudiar una sujJerficie en Ea. La idea general consiste en
pensar en una superficie como una especie ele curva bidimensional y
mantener la actitud de Frcnct en la medida de lo posible. P<Jra Jleyar
adelante este propósito, necesitamos la generalización (teorema 7.2) de
las fónnulas de Frenet que se debe a E. Cart:m. Fue Cartan el que, en los
inicios de este siglo, advirtió por primera vez la potencia total de este
método no solamente en la geometría diferencial, sino en una diversidad
de campos relacionados con ella.
-
El producto escalar
Ernprzarcmos con el rrpaso ele al!!;unas propiedades básicas acerca del producto il<lnior natur:1l en el csp:1cio \TCtorial E'.
55
56
CAMPOS DE SISTEMAS DE REFERENCIA
1.1 DEFINICIÓN. El producto escalar de los puntos p
=
(p 1, h,
p3 )
y q = (q1, q2, q9) en E 3 es el número
+ Pzqz +
P • q = ji1q1
jJ3q3.
El producto escalar es un producto interior, pues posee tres propiedades:
l. Bilinealidad:
( ap
+
bq) • r = ap • r
+
r • (ap
bq)
ar • p
=
+ bq • r
+ br • q.
2. Simetría: p • q = q • p.
3. Definición positiva: p · p >O, y p • p =O si y sólo si p =O. (.Aquí
p, q y r son puntos arbitrarios de E 3 , y a y b son números.)
La norma de un punto p = (jJ~1, p2 , p:;) es el número
La norma es, por consiguiente, una función en E 3 de v:1lores reales;
tiene las propiedades fundamentales ij p + q 11 < 11 p 11 + li q 11 Y j[ ap li
= 1 a 111 p 11, donde 1 a 1 es el valor absoluto del número a.
En términos de la norma, tenemos una versión compacta ele la fórmula
habitual de la distancia en E 3 •
1.2 DEFINICIÓN. Si p y q son puntos en E-1, la distancia euclidiana
de p a q es el número
d(p, q)
=
11
p- q
11·
De hecho, puesto que
el desarrollo ele la norma nos da la fórmula que ya conocernos (figura 2.1)
Podemos servirnos del concepto de distancia euclidiana para precisar
nuestra definición de conjuntos abiertos (capítulo 1, sección 1). En primer
/
/
/
VP
/
/
/
/
/
/
/q
/
Ví p¡Figura 2.1
q¡l
57
EL PRODUCTO ESCALAR
>
lugar, si p es un punto de E" y si E O es un número, la E-vecindad O?c
de p en E 3 es el conjunto de todos los puntos q en E" tales que d ( p, q)
E. Entonces un subconjunto (') de E-1 será abierto cuando cada punto
de (9 tenga una E-vecindad que quede completamente contenida en (9.
Con brevedad, decimos que todos los puntos que están suficientemente
cerca de un punto de un conjunto abierto también están en el conjunto.
Esta definición conserva su validez al substituir E 3 por E"; tambi~n, desde
luego, en cualquier conjunto en que exista una función de distancia que
se:t razonable.
Vimos en el capítulo I que para cada punto p de E 1 h:1y un isomorfismo canónico v --c> Vp de E" sobre el espacio tangente TP (E") en p. Estos
isomorfismos forman el corazón ele la geometrb euclidiana; al emplearlos,
se puede transferir el producto punto en el mismo E" a cada uno de sus
esp:1cios tangentes.
<
1.3 DJ-~FINICIÓN. El producto escalar de los vectores tangentes
en el mismo punto de E 3 es el número v 1,owJl = v•w.
Vv
y
Wp
Por ejemplo, (1,0, -1)p•(3, -3, 7) 1, = 1(3) + 0(-3) + (-1)7 =
-4. Es evidente que esta definición nos da un producto escalar en cada
espacio tangente T¡¡(E 3 ) con las mismas propiedades que las del producto
escalar original en E". En particuhn, cada vector tangente Vp a E" tiene
norma (o longitud) llvP\1 = \\vil·
Un resultado fundamental del álgebra lineal está constituido por la
desigualdad de Schwarz \ v•w 1 = 11 v \111 w 11· Esto nos pcrmitP definir el
coseno del ángulo {} que forman v y w por medio ele la ecuación (figura 2.2)
v•w = 11 v 11 11 w \1 cos{f.
Por lo tanto, el producto escalar de dos vectores es el producto ele sus
longitudes, que a su vez se multiplica por el coseno del ángulo que forman.
(El ángulo 19· no queda determinado de manera única a menos que se den
restriecimws, como, por ejrmplo, O < {} < "·)
En particular, si {} = rc/2, entonces v·w = O. Por lo tanto, definiremos
dos vectores como ortogonales cuando su producto escalar valga cero. También decimos que un vector cuya longitud es 1 se llama vector unitario.
--
1.4 DEFINICIÓN. Un conjunto e 1 , ee, e:; de tres vectores unitarios ortogonales entre sí, tangentes a E 3 en p, se llama sistema de referencia en el
punto p.
Por lo tanto, e 1 ,
""'
e 3 es un sistema de referencia,
58
CAMPOS DE SISTEMAS DE REFERENCIA
Figura 2.3
Figura 2.2
Por la sirnc:tría del producto escalar, la segunda fila ele ecu~1c1ones es lo
mismo, por supuesto, que
Si empleamos notación indiciada, podernos expres;¡r concis:unente las
nue,·e ecuaciones como e¡ "f' j = 8 1 j para 1 < i, j ::=: 3, don ele 8; j es la delta
de Kronecker (O si i-=/= j, 1 si i = j). Por ejemplo, en Glcla punto ¡) de E 3 ,
los vectores U 1 (p), Ue(p), L'c(p) ele la definición 2.1 del capítulo I comtituyen un sistema de referencia Pn p.
1 .5 TEoRU\IA. Sea c 1 , ee, e:; un sistema de referencia en un punto
p ele E 3 . Si v es cualquier vector tangente a E'l en p, entonces (figura 2.3)
Demostración. Demostraremos en primer lugar que los vectores e 1 , e 2 ,
son linealmente independientes. Supongamos que
ee
Entonces
donde todas las sumas se hacen sobre i
=
1, 2, 3, Por lo tanto,
que es lo que se requería. Ahora bien, el e'pacio tangente: T 1, (E") tiene
dimensión 3, puesto que es linealmente isomorfo a E'. De donde se desprende, gracias a un conocido teorema del úlgebra lineaL que los tres
vectores independientes e 1 , e 2 , e:; forman una base de T 1,(E'l). En consecuencia, hay para cada vector v tres números (únicos) c 1 , Ce, e" tales que
V=
Pero
v·ei
:E C¡e¡.
EL PRODUCTO ESCALAR
59
y, por lo tanto,
1
Este resultado (que tiene validtez en cualquier tespacio ele producto interior) es una ele las graneles ideas que eYitan el trabajo laborioso en las
matemáticas. De acuerdo con él, para encontrar las coordenadas de un
YCctor v con respecto a una base arbitraria, se debe resolver en• general
un conjunto de ecuaciones lineales no hornogéneo, y esta tarea, aunque nos
confinemos a la dimensión 3, no es siempre trivial por completo. Pero el
teorema nos tenseña que para encontrar las coordenadas de v con respecto
a un sistema ele referencia (es decir, a una base ortonormal) es suficiente
calcular simplemente los tres productos e sea lares v•e 1 , v•e", v·e,. Decimos
que este proceso es el desarrollo ortonornzal de v en términos del sistema
de referencia e 1 , e 2 , e::· En el caso especial del sistema natural ele referencia
U 1 (p), U 2 (p), U 3 (p) la identidad
es un desarrollo ortonormal, y se define el producto escalar en términos
de estas coordenadas euclidianas por v·w = .~ 1'¡L<'j· Si en lugar ele ello
empleamos un sistema arbitrario de referencia e 1 , e 2 , e 3 , entonces cada
vector v tiene las nuevas coordcnad:1s a; = v•e¡ relativas a este sistema
de referencia, mientras que el jJroducto escalar s1gue estando determinado
por la misma fórmula sencilla
puesto que
¿
v·w
a;bj e;•ei
i . .i
~ a¡bj 8ii
t.}
En la aplicación a situaciones geométricas más complicadas, la ventaja
ele emplear sistemas ele referencia se vuelye enorme, y es por ello que en
nuestro libro aparecen con tanta frecuencia.
La idea de sistema de referencia se parece bastante a la de matriz
ortogonal.
-
1 .6 DLFI:0<TCIÓ0!. Sea e 1 , ec, e 3 un sistema de referencia en un punto
p de E. La matriz 3 X 3 A cuyas filas son bs
coorckn;~das euclidianas de los
tres vectores en cuestión y se llama matri.3 de d isj!osici<!n del sistema de
referencia.
60
CAMPOS DE SISTEMAS DE REFERENCIA
De manera explícita, s1
e1
=
(a 11 ,a12,a13)p
Ce
(a e,, aee, a23) p
eo
( a 31 , a"2' as3) P
entonces
Es así como A describe, en efecto, la "disposición" del sistema ele referencia en E", aunque no su punto de ilplicación.
Es evidente que las fibs de "1 son ortonormales, puesto que
Esto significa, por definición, c¡ue A es una matriz ortogonal.
En términos de la multiplicación ele matrices, se pueden expresar estas
ecuaciones como A 1A = 1, donde 1 es la matriz identidad 3 X 3 y 1A es
la transpuesta de A:
a21
a:!.2
a,l
a.,.,
"-
a23
ass
J
Por uno de los teoremas estándar del álgebra lineal, tenemos que 1AA = 1,
ele manera que 1A = A-t, que es la inversa de A.
Tenemos otro producto en E\ que se rebciona estrechamente con el
producto tilde de las 1-formas, y que sigue en importancia sólo al producto
escalar. Lo transferiremos inmediatamente a cada uno de los espacios tangentes de E''.
1.7 DEFINICIÓN. Si v y w son vectores tangentes a E3 en el mismo punto
p. entonces el producto vectorial de v y w es el vector tangente
vXw=
Z.\
wl
Este determinante formal se ha de desarrollar a lo largo ele su primera
fila. Por ejemplo, si v = ( 1, O, -1) P y w = (2, 2, -7) p, entonces
Ct(p)
vXw= 1
2
2Ul(p)
U2(p)
U3(p)
o
-1
2
-7
+ SU2(p) +
2Us(P)
(2, 5, 2) p·
61
EL PRODUCTO ESCALAR
Por medio de las propiedades conocidas de los determinantes, vemos
que d producto vectorial v X w es lineal en v y en w, y que satisface la
regla de alternación
v X w
=
-w X v
(de donde se desprende, en particular, que v X v = O) . La utilipad geométrica del producto vectorial se basa sobre todo en el siguiente
1.8 LEMA. El producto \·ectorial v X w es ortogonal a tanto v como
w, y tiene una longitud tal que
11
v X w
!!"
=
v·v w·w - ( v·w) 2 •
Demostración. Sea v X w = ¿: ciUi (p). Entonces el producto escalar
v·(v X w) es simplemente ¿: u;c;. Pero, por la definición ele producto
vectorial, las coordenadas euclidianas e1 , e", c 3 ele v X w son tales que
v·(v X w)
V
v,
v2
v3
u1
v2
V:¡
w,
Wz
1C':o
X W
Figura 2.4
El determinante vale cero, puesto que dos de sus filas son iguales; en
consecuencia, v X w es ortogonal a v, y, de la misma manera, a. w.
En lugar de emplear trucos para demostrar la fórmula de la longitud,
vamos a hacer cálculos de fuerza bruta. Tenemos
v·v w•w- (v·w) 2 = (L: v/) (L: w/) -
(L: v.¡w;) z
2 ¿: V¡W¡UjZC'j·
i;j
'i<j
62
CAMPOS DE SISTEMAS DE REFERENCIA
Por otra parte,
\1
v X
w W=
(v X
w) •(v
w) = :¿
X
(u"w3 - V3We)"
+
<i"
(vsw1 - v1w3) 2
+
(u 1 l<'"
-
v"w¡)
2
1
y al desarrollar estos cuadrados se obtiPne el mismo resultado de antes.
Tenemos una descripción más intuitiva de la longitud de un ~roducto
vectorial en la expresión
11 V
X
W 11
= :i V
1 r 1f W
11
sen lP,
donde O < {)· < " es el menor ele los dos ángulos que forman v y w. La
dirección de v X w en la recta ortogonal a v y w queda dada, para propósitos prácticos, por esta "regla diestra"; si los dedos ele la mano derecha
apuntan en la dirección de la menor rotación de v a w, entonces el pulgar apunta en la dirección y sentido de v X w (figura 2.4).
Al combinar Jos productos escalar y vectorial, tenemos el producto
escalar triple, que asigna a tres Yectores cualesquiera u, v, w el número
n-v X w (ejercicio 4). No es necesario emplear aquí paréntesis: el único
significado posible es u• ( v X w) .
EJERCICIOS
1. Seanv= (1,2,-1) yw= (-1,0,3) vectorc:stangentesenunpunto
de E". Calcúlense
a) v•w.
b) v X w.
e) v/11 v lf, w/JI w 1;.
d) lf v X w 11·
e) El coseno del ángulo que forman v y w.
2. Demuéstrese que la distancia euclidiana tiene las propiedades
guientes:
a) d(p, q) >O; d(p, q) =O si, y sólo s1, p = q,
b) d(p,q) = d(q,p),
e) d(p, q) + d(q, r) > d(p, r),
para cualesquiera puntos p, q, r en E'3 •
SI-
3. Demuéstrrse que los vectores tangentes
( L 2, 1)
y6
e.,
-
( -2, O, 2)
= ---·-=-yB '
e.J =
.
(l. -1, 1)
-----~
y'3
--'--
constituyen un sistema ele referencia. Exprésese v = (6, 1, -1) como
combinación lineal ele estos vectores. (Compruébese el resultado mediante el cálculo directo.)
4. Sean u= (u,,
que
U
c.
u:;), v
=
(u,, v2 , v 3 ), ·w = w 1 , w 2 , w:~). Demuéstrese
63
EL PRODUCTO ESCALAR
1
a)
u·v X w =
U1
V1
1 1t' 1
u2
ll3
(}2
v3
[('"
l()3
1
b) u·v X w =/=O si, y sólo si, u, v y w son linealmente independientes.
e) Si dos vectores cualesquiera de la cxpresi(m u•v X w invierten su
orden, el producto cambia de signo. De manera explícita,
u•v X w = v•w X u= w•u X v
= - w•v X u = - v•u X w
d) u·v X w = u X v•w.
-u·w X v.
5. Demuéstrese que v X w =/= O si, y sólo si, v y w son linealmente independientes, y verifíquese que v X w es el área del paralelogramo con
lados v y w.
6. Si e1, ce, e 3 es un sistema de referencia, demuéstrese que
C1"Cc
X
Cs =
-+-1.
Dcdúzcasc que cualquier matriz ortogonal 3 X 3 tiene determinante
-+-1.
7. Si u es un vector unitario, entonces la componente de v en la dirección u es
v•u u =
11 v 11 cos i} u.
Verifíquese que v tiene una expresión única v = v 1 + v "' donde
V1"V2 = O y v 1 es la componente de v en la dirección u.
8. Demuéstrese que el volumen del paralelepípedo con lados u, v, w es
-+-u•v X w (figura 2.5). (Indicación: empléese el vector unitario
indicado e= v X w/il v X w 11.)
-
9. Demuéstrese rigurosamente, por
medio de E-vecindades, que
cada uno ele los siguientes subcon juntos E 3 es abierto:
a) Todos los puntos p tales
que 11 P JI< l.
b) Todos los p tales que p" >
O. (Indicación: [Pi - qi 1
< d(p, q) .)
/
/
Figura 2.5
64
CAMPOS DE SISTEMAS DE REFERENCIA
1O. En cada caso, sea S el con junto de todos los puntos p que cumplen
con la condición dada. Descríbase S y determínesc si es abierto.
a) P1 2 + Pl + P3 2 =l.
e) jh = ih-=fojJ,.
b) Pa =F O.
d) fh 2 + p" 2 < 9.
11. Si
f
es una función diferenciable en E-', verifíquese que el gradiente
"V/
=
¿;
(o/ /ex¡) U¡
(ejercicio 8 de I.6) tiene las propiedades siguientes:
a) v[f] = ( df) (v) = v• ( '\7 f) (p) para cualquier vector tangrntP en p.
b) La norma 11 ('\lf) (p) 11 = [2:(of/ox¡)2(p)]l~ de ("V/) (p) es el
máximo de las derivadas direccionales u[f] de todos los vectores unitarios en p. Además, si ( '\1/) (p) =F O, el vector unitario en el que
ocurre el rnáxin10 es
('\lf) (p) /11 ("Vf) (p) 11·
Las notaciones grad f, rot V y div V (en el ejcrcJClO a que nos
hemos referido) se reemplazan con frecuencia por '\1 f, '\1 X V y
'\l•V.
12. Funciones angulares. Sean f y g funciones en el intervalo 1, diferenciables y de valores reales. Supongamos que f 2 + g 2 = 1 y que {) 0
es un número tal que f(O) = cos {} 0 , g(O) =sen {} 0 • Si{} es la función
tal que
{}(t)
+
J:
(fg'- gf') dt,
=
{} 0
f
= cos {}, g = sen{}.
demuéstrese que
(Indicación: queremos obtener (f - cos {})
muéstrese que
(f cos {}
+ g sen{})'
=
2
+
(g - sen{}) 2
=
O; de-
O.)
La esencia de este ejercicio radica en que {} es una funci"én difercnciable, definida sin ambigüedad en todo el intervalo l.
2
Curvas
Empezaremos a hacer nuestro estudio geométrico de las curvas con el
repaso de algunas definiciones conocidas. Sea a: 1--'? E 3 una curva. En
el capítulo I, sección 4, definimos el vector de velocidad a' ( t) de a en t.
65
CURVAS
Vamos a definir a continuación la rajJidcz de a en t como la longitud
v ( t) = 11 a' ( t) 11 del \'Cctor de velocidad. Por lo tanto, la rapidez es una
función de valores reales en el intervalo l. En términos de coordenadas
euclidianas a = ( a 1 , a e, a 3 ), tenemos
,
a (t)
(dadT (t)'
1
=
da 2
~lt
das
)
(t)' -dt (t) ·
Por consiguiente, la función rapidez v de a está dacla por la fórmula
habitual
v
=
!1 a' 11
= ( ( ~~ } + ( ~7} + ( ~F}
1
t
En la física, la distancia que recorre un punto en movimiento se determina al integrar su rapidez con respecto al tiempo. Por consiguiente, nosotros definiremos la longitud de arco de a desde t = a hasta t = b como
el número
jf"a
11
a'(t)
11
dt.
Si recordamos la fórmula de 11 a' 1[, que obtuvimos antes, obtendremos
la fórmula habitual de la longitud de arco.
A veces lo único que interesa al que estudia el problema es la trayectoria
que sigue una curva, y no la rapidez parlicular con que la recorre. Una
manera de omitir la consideración de la rapidez de una curva consiste en
reparametrizarla a una curva f3 con rapidez unitaria 11 (3' 11 = l. EntoncC's
f3 representa un "viaje estándar" por la trayectoria de a.
2.1 TEOREMA. Si a es una curva regular en E 3 , entonces existe una
reparametrización f3 de a tal que f3 tiene rapidez unitaria.
Demostración. Fijemos un número a en el dominio I ele a: I
consideremos la función de longitud de arco
s(t) =
-
L
!1
a'(u)
11
--3>
E3 y
du.
(Se dice que la reparamctrización r¡ue resulta se basa en t =
Por lo
tanto, k derivada dsjdt ele la función s = s(t) es la función rapidez
v = i 1 a' 11 de a. Puesto que a es regular, a' no es, por definición, nunca
cero; en consecuencia, ds / dt > O. Por un teorema estámbr del cálculo, b
función s tiene una función im-ersa t = t(s), cuya deri,·ada dtjds en
s = s(t) es el im-crso de dsjdt en t = t(s). En particular, dtjds >O.
Sea a continuación f3 la reparametrización f3 (s) = a ( t (s) ) de a. Afirmamos que f3 tiene rapidez unitaria. De hecho, por el lema 4·.5 del capítulo I,
fJ'(s) = (dtjds) (s)a'(t(s) ).
66
CAMPOS DE SISTEMAS DE REFERENCIA
En consecuencw, por lo que se ha dicho, la rapidez de (3 es
11
(J'(s)
11
dt , ,,
= ~!.1 (S) ¡ a'(t(s))
11
dt
ds
= d~ (s) ~lt (t(si) = l.
1
A menudo haremos uso de la notación de esta demostración en nuestro
trabajo posterior. Se dice que la curva fJ de rapidez unitaria tiene una
paramctri:c:ación de longitud de arco, puesto que la longitud de arco de
(3 desde s = a hasta s = b (a < b) es simplemente b - a.
Por ejemplo, vamos a comiderar la hélice a del ejemplo 4.2 ele! capítulo I. Puesto que a(t) = (acost, asent,bt), la velocidad a' estCt
dada por la fórmula
a'(t)
(-asent,acost,b).
En consecuencia,
:1
a'(t) W
Por lo tanto, a tie~e rapidez constante e = [, a' ¡[ = (a"
climos la longitud de arco desde t = O, tendremos
s(t) =
t
e dt
=
+
b") "· Si me-
ct.
En consecuencia, t(s) = sfc. Al tomar esto en cuenta en la fórmula de a,
obtenemos reparametrización de rapidez unitaria
.\
/J\)-.
(S) = (acos--,ascn-.
e
e
(J(s) =a e
S
1. ·
Se comprueba con facilidad y de manera directa que 11 fJ' (s) 11 = 1 para
toda s.
Se dice que una rcparametriz:1ción a ( h) de una cun·a a conserva la
orientación si h' ¿ O, y que inuiertc la orientación si h' :=;; O. En el segundo
caso, a y a ( h) recorren la misma trayectoria en sentidos opuestos. Por los
convenios que hemos cstablc·:ido, una reparamctrización ele rapidez unitaria
siempre conserva la orit•ntación puesto que, en una curva regular a,
ds/dt >O.
Vamos a definir a continuación un:1 variante de la idea general ele
campo \ectori:1l (definición 2.3 del capítulo I) que se adapta al estudio
de las curvas. A grandes rasgos, un campo vectorial en una curva consiste
en un \-ector en cada punto de la curva.
2.2 DEFr:-;rciÓN. -L~n campo c'cctorial Y en una curz.•a a: I ---7> E" es
una función que asigna a cada número t en I un Vl'Ctor tangente Y(t)
a E" en el punto a(t).
67
CURVAS'
Ya hemos empleado campos vectoriales así, puesto que en cualquier
curva a, S'l wlocidad o/ satisface evidentemente esta definición. Adviértase
que, a diferencia de a:', los campos \·ectoriales arbitrarios en a no han
ele ser ncccsariamrnte tangentes a a, smo que pueden :1puntar en cualquier
cliro-cció:l (figura 2.61.
Fisura 2.6
Las propiedades de los campos vectoriales e11 curvas son :;nálo;;:as a las
ele los campos vectoriales en E". Por ejemplo, si Y es un campo vectorial
en a: I ....¿E", entonces poden; os poner, para cada t en I,
Es así como hemos definido funciones en I ele valores reales y 1 , yc, )'"
que se lbman funciones coordenadas euclidianas ele Y. Su¡Jondremos siempre qu~ son difercnciablcs. Obsén:esc que b función compuesta
t....¿ U; (a ( t)). es un carnro vcctorizll l'Tl (1'. })onclc podamos hacerlo con
seguridad, escribiremos simplemente
en lugar de
(n(l)).
Las operaciones ele adición, mul:iplicación por un escalar, producto
escaL:r y producto vectorial de campos vectoriales (en b misma <:mYa) ~t·
definen todas de la mzdKra h~:bitual ele operar punto pm· punto. Por
consiguic;:te. si
,.i
e,
Y(t)
V
+1
f (t)
obtCJ;crno;; los campos vcccc>riales
(Y+ Z) (t)
=
t"U1 + (1- t")U"
(fY)(t)·= t(t
+
l)U 1
-
(t
+
l)U"
68
CAJ\IP(JS DE
SISTEMAS DE REFF.RENCIA
: ul
(Y X Z) (t)
1
lP
[J3
o
t"
.o
1
-- t
1 - t"
t(l
=
'·· la función ele valorcs reales
(Y·Z) (t)
- t".
Para diferenciar un camjJo vectorial en a se diferencian simjJlemr:nte
sus funciones coordenadas euclidianas, de manera que se obtiene un nuevo
campo vectorial en a. De manera más explícita, si Y = 2: y;L';. cntonccs
Y'= 2;(dy;jdt) Ui. Por lo t:mto, en el Y de antes, obtPnemos
Y'= 2tU 1
-
l\,
Y'"
y
=
O.
En particular, la derivada a" de la velocidad rv.' de a se llama aaleración
de a. De esta manera, si a= (a 1, ae, a 3 ) , la aceleración a" es el campo
\'ectoria 1
d"a d a,)
2
( -----rFa 1 - ---1 ----1
11
(1'
\ dt" ' dt
2
'
dt 2
~
en o:. La aceleración, en contraste con la vclocid::ld, no es en general tangrntc a 1~ curva.
Comn lwmos dicho antes, al margen de la forma en que aparezca, la
difcrcnci:1ción posee siempre las prc.piedades adecuadas ele lincalicbd y
de Leibniz. En el caso ele los campos vectoriales en una curYa, es fácil
verificar b propiedad de lir.ealidad
(aY+ bZ:i' =aY'+ b[
(donde a y b son números) y las propiedades dr Leibniz
(fY)'
=:~;Y+
fY'
y
(Y·Z)' = Y'·Z
+
Y·Z'.
Si h función Y·Z es constante, la última ele las fórmulas nos dice que
Y'•Z
+
Y·Z' =O
En nuestro trabajo posterio;·, acudiremos con frecuencia a est2. observ:tción. En pari.icular, si Y tiene longitud constante [[Y [j, entonces Y y Y'
son ortogonales en cada punto, puc,to que [j Y i!Z = Y·Y tiene un valnr
comtante, y esto implica que 2Y• Y' = O.
Recordemos que los yectores tangentes son paralelos si tienen la misma
P:'''lC' \TCtorial. Decimos que un CZllilJ'O vrctori;:;l y en una curvu es jJaralclo
69
CURVAS
cuando todos los valores (ele vectores tangentes) son paralelos. En este
caso, SI la parte vectorial que tienen en común es ( c 1 , ce, c3 ), entonces,
para todo t.
Por lo tanto, el paralelismo en un campo yectorial ec¡ui\·ale a la constancia
de sus funciones coordenadas cuclidi:.mas.
La anulación de las deri,·adas siempre ha sido una cuestión impc1rtantc
en el cálculo; aquí tenemos trt's casos SC'ncillos.
2.3 LEJ\IA. l. Una curva a es constante si y sólo :,¡ su n:locidad es
cero: a' = O.
2. Una curva no constante a es una recta s1 \' sólo si su aceleración
es cero: a" = O.
3. Un campo vectorial en una CutYa es paralelo si y sólo si su derivada
es cero: Y'= O.
Demostración. En cada caso, scrú suficiente que t'xamincmos las funciones coordenadas euclidianas. Por ejemplo, demostraremos (2). Si n: ~"
( a 1 , a,, a 3 ) , en ton ces
a"
Por ]o tanto, a"
O si y sólo si cada d'2cq / dt 2 Y ale O. Por los resultados
del cálculo elemental, esto equivale a la existencia dP constantes Pi y q,
tales que
a¡
(t)
=
jJ¡
+ iq¡,
para z
=
1, 2, 3.
Por lo tanto, a(t) = p + tq, y a es una recta según la definición del ejemplo 4.2 del capítulo I. (Observemos aquí que la 11(> constancia implica
que q
*
0.)
EJERCICIOS
-
1. En la curva a(t) = (2t. t 2 , (J/3),
a) encuéntrense la velocidad, la rapidez y la aceleración para t. arbitraria y en t = 1 ;
b) encuéntrense las funciones de longitud de arco s = s ( t) (con b:1se
en t = O) y determínese la longitud de arco de a desde t = -1
hasta t = +l.
2. Demuéstrese que la curva a ( t) = (t cos t. t sen t, t) descansa sobre
un cono en E 3 . Encuéntrense la vclocid¡¡c1, la rapidez y la acclcraciól!
ele a en el vértice del cono.
70
C:Al\IPOS DE SISTEMAS DE REFERENCIA
30 Demuéstrese quE' la curya a ( t) = (cosh t, senh t, t) tiene la función
de longitPd ele arco s(t) = \¡-2~scnh t, y encuéntrese una n·parametrÍ7ación de rapidez unitaria de a.
4. Comideremos la cu1Ya a ( t) = ( 2t, t. !og t) en l: t > O. Demuéstrese
que PSta CU!Ya pasa por los puntos p = (2, 1, lfl y f{ e~ (+, ·4, log 2) o
y cnruéntresc la longitud de arco entre estos ;mntos.
- 5.
Supon~amo:;
que [3 1 y [3" ';ean reparametrizaciones de rapidez unitaria
de b mi:oma curva a. Dcmuéstreo.e la t"xistcnciZl de un número s0 tal
que p"(s) = [3 1 !s + s"l para toda s. /Qué significado geométrico
es el de so?
6. Sea Y un campo \·ectori:;l en la hélice ce ( t)
cada uno de los casos siguientes, exprésese Y
a) Y(t) es el Yector que \a de a(t'i ~11 origen
b ) y ( t ) = rt' ( t) - rt" ( t)
r) Y ( t) tiene longitud unitaria y es ortogonal
= (cos t, sen t, t) En
en la forma :¿y; Ui:
de E'.
o
o
rt" ( t)
tanto a ,¿ ( t) corno a
o
d) Y(t) c·s el yector que va de a(t) a rtl! +-e).
70 Sea Y un campo vcTtorial en una cun·a a. Si a(h) es una rcp::uarnetri7ació11 de (Y clcnmt"strcse que Y ( h) cs un campo Yectorial en a ( h) o
así como la rcgb ele la cadena Y ( h)' = h' Y' ( h) .
0
8. Sean a, f3: I ---3> E e cunas talcs que a' ( t) y [3' ( t) son paralelos ( coorclenacbs euclidianas iguales) p:o.ra cada 1 Demuc;strese que a y f3 son
jJaralc!as en el sentido ele que hay un punto p en E'3 tal que f3(t) =
a(l) + p para toda t.
o
9. Si a es una cun·a regubr, h:ígase HT que
a) a tiene rapidcz constante ~;i y sólo si la acdcración ,t" es siempre
ortogonal a a (es decir, a a').
b) a l'S rcparamctrización de una recta t --+ p + tq si y sólo si a" es
sicrnpi·e tangente a ,a ( rs decir, a" y a' son colineaks).
10. Una porción ck una curva definida en un intervalo cerrado [a, b]:
a< t < b, se llama segmento de cur<'a. Una reparametrización a(h):
[a,b]---3>E' de un segmento de curva a: [r,d]---3>E 0 será monótona
cuando se cumpla cualquiera de las rondicionl's
a)h' >O, h(a) = r, h(b) =d. o b) h' :==::O, h(a) = d, h(b) =c.
Demuéstrese que la reparametri7ación monótona no altera la longitud de arco.
llo Demuéstrese que la rE'cta es la distancia m:ís corta entre dos puntos de
E". Para ello, sirve el esquema siguiente; sea a: [a, b] ---3> E 3 un seg-
LAS FÓRMULAS DE FRENET
71
mento arbitrario de curva que va de p = a (a) a q = a ( b). Sea
u= (q- p)(l q- p !1·
a) Si a es un "egmento de recta que va de p a q, por ejemplo,
(}" ( t)
(1
=
- t) p
+
tq
(o < t < 1)'
hágase wr que L(a) = d(p, q).
b) A partir de que [[ a' j 1 :2: a'•u, clcclúzcase que L (a) ;::o: ~~ (p, q),
donde L (a) es h longitud ele a y d es la distancia euclidiana.
e) También hágase ver que si L(a) = d(p, q), entonces (con la
excepción ele la parametrización), a es un segmento de recta.
(Indicación: escríbase e/= (a'•u)u +Y, donde Y•u = 0.)
3
Las fórmulas de Frenet
Deduciremos a continuación las mE'didas matemáticas de las vueltas y
torsiones de una curva de E 3 . A lo largo de esta sección, estudiaremos solamente curvas ele rapidez unitaria; en la próxima, extenderemos la validez
de los resultados a curvas regulares arbitrarias.
Sea B: I--'? E 3 una curva ele rapidez unitaria, de manera que 11 f3'(s) 11
= 1 para cada s en J. Entonces, T = (3' se llama campo vectorial tangente
unitario en (3. Puesto que T tiene la longitud constante 1, su derivada
T' = (Y' mide la manera en que la curva da vuelta en E". Decimos que T'
es el campo vectorial de curvatura de (3. La diferenciación ele T•T = 1
nos resulta en 2T'·T = O, de manera que T' es siempre ortogonal a T, es
decir, es normal a (3.
/}( 8)
rl (s)
Figura 2.7
La longitud del campo vectorial de curvatura T' nos da una medida
numérica de la manera en que f3 da vueltas. La función de valores reales K
t<1l que K(s) = 1: T'(s) 11 para todas en I se llama función de curvatura
de (3. Por lo tanto, K> O, y a mE'dida que r: es mayor, se tienen vueltas
más pronunciadas de (3.
72
CAMPOS DE SISTEMAS DE REFERENCIA
Para llevar más lejos este análisis, vamos a imponer la restricción de
que K no es nunca cero, de manera que K > O.t Entonces, el campo vectorial unitario N = T' 1K en f3 nos dice la dirección en que f3 da vuelta
en cada punto. N se llama campo vectorial normal principal de f3 (figura 2.7). El campo vectorial B = T X N en f3 se llama entonces campo
vectorial binormal de .f3.
3.1 LEMA. Sea f3 una curva de velocidad unitaria en E 3 en la que
K > O. Entonces, los tres campos vectoriales T, N y B en f3 son campos
vectoriales unitarios ortogonales entre sí en cada punto. Decimos que T,
N, B constituyen el campo de sistemas de referencia de Frenet en [3.
Demostración. Por definición
11
N
11
11
T
= ( 11K)
11
11
= l. Puesto que
T'
11
K
=
11
T' i 1 > O,
= l.
Vimos antes que T y N son ortogonales; esto significa que T•N = O. Entonces, al aplicar el lema 1.8 en cada punto, concluimos que 11 B 11 = 1, de
manera que B es ortogonal tanto a T como a N.
1
En resumidas cuentas, tenemos T = (3', N = T' 1K y B = T X N, con
la propiedad de que T•T = N•N = B•B = 1, con los demás productos
punto iguales a cero.
La clave del buen estudio de la geometría de una curva f3 consiste en
emplear su campo de sistemas de referencia de Frenet T, N, B siempre
que sea posible, en lugar del campo natural de sistemas de referencia
U 1 , U 2 , U 3 • Esto se debe a que el campo de sistemas ele referencia ele Frenet
está pletórico ele información acerca ele [3, mientras que el campo natural de sistemas de referencia no contiene nada ele ella.
La aplicación primera y más importante de esta idea es la expresión
de las derivarlas T', N', B' en términos de T, N, B. Puesto que T = [3',
tenemos T' = B" = KN. Consideremos a continuación B'. Afirmamos que
B' es, en cada punto, múltiplo escalar de N. Para verificarlo, no tenemos
más que hacer ver por el desarrollo orto normal que B' •B = O y que
B'•T = O. Lo primero se cumple puesto que B es vector unitario. Con el
objeto de demostrar lo segundo, diferenciamos B·T = O, y obtenemos
B'·T + B·T' = O; entonces
Por lo tanto, aquí ya estamos en posibilidad de definir la función de
torsión T de la curva f3 como la función en el intervalo 1 de valores reales
i" En una curva arbitraria de rapidez unitaria, esto significa que debernos
hacer separadamente un estudio de cada segmento en el que K
O; véase el ejercicio
19 de la sección 4.
>
73
LAS FÓRMULAS DE FRENET
tal que B' = -,N. (El signo de menos tiene orígenes en la tradición.)
Hay un contraste con la cun·atura: aquí no se restringen los valones de T:
pueden ser positivos, negativos o cero en diversos puntos de 1. (Además, el
signo de T resulta tener en cada punto un interesante significado geométrico.) A continuación veremos que T mide en efecto la torsión, o torcedura, de la curva f3.
.
3.2 TEOREMA (las fórmulas de Frenet). Si f3: 1-:> E 3 es una curva
de rapidez unitaria en la que K > O y la torsión es •, entonces
KN
T'=
N'= -KT
B'
+TE.
=
-,N
Demostración. Como se vio antes, las fórmulas primera y tercera son,
en esencia, las definiciones de curvatura y torsión. Para demostrar la segunda, emplearemos el desarrollo ortonormal con el fin de expresar N' en
términos de T, N, B:
=
N'
N'·T T
+ N'·N N +
l\"'·B B.
Estos coeficientes son fáciles de encontrar. Al diferenciar N·T = O,
obtenemos N'•T + N•T' = O; por consiguiente,
Como solemos tener, N'·N
unitario. Por último,
N'·B
=
=
O, debido a que N es un campo vectorial
= -N·( -TN)
-N•B'
1
=T.
3.3 EJEMPLO. Vamos a calcular el sistema de referencia de Frenet
T, N, B y las funciones de curvatura y de torsión de la hélice de rapidez
unitaria
f3 (s) =
donde e= (a"
+
b") l/é y a
T ( s)
(a
>O.
cos
~, a sen
;,
bs),
e
Ahora bien,
b)
s -a cos -s = f3 , (s) = ( - -a sen -,
e
e e
e' e
En consecuencia,
T' (s)
(
-
S
a
cz cos e'
Por lo tanto,
K(s)
11
T'(s)
11
az
+a
bZ
>O.
74
CAMPOS DE SISTEMAS DE REFERENCIA
Puesto que T'
= ¿\',
concluimos que
N ( s) = (- cos s, - sen
r
~,e O) .
"
Observemos qwc, al margen de los valores que teng:m a y b, N siempre
apunta directamente al eje del cilindro en el que desczmsa /3 (figura 2.8).
Si aplicarnos h definición de proclucto cruz
',
a B = T X X, obtenemos
B( s). =
T
(b
e
a)
S
sen -,
- --!J cos -_S , - .
e
e
r: e
Nos falta calcular la torsión. Tenemos
l
\
b
' b
B' (s) = ( - cos - -- sen · O 1
c'2 · r' e-:?
(' ")'
Figura 2.8
y, por definición, B' = - Tl\'. Si comparclmos
las fórmulas de B' y ele N, concluimos que
T (
b
b
s) == -e"- = a"+
" b~ .
De manera que la torsión ele la hélice también es constante.
AclviéTtnsc que cuando el \·alar del parámetro b es cero, b hélice se
reduce a una circunferencia ele rndio a. La curv:ltura ele: esta circunferencia
es K = lja (de manera que a radios menores corresponden curvaturas
mayores) y la torsión es idénticamente cero.
Este ejemplo es de un caso muy especial: en general (como se \·e en
los ejemplos escogidos para los ejercicios), las funciones de curvatura y
de torsión de una curva no son necesariamente constantes.
3.4 Co:\IENTARIO. Hemos insistido constantemente en la diferencia entre
un vector tangente y un punto ele E 3 • Sin embargo, el espacio euclidiano
tiene, como ya hemos visto, la propiedad notable de que, dado un punto p, hay una correspondencia natural y uno ;_; uno entre los puntos ( v 1 ,
u2 , V :o) y Jos vectores tnngcntes ( z_o 1 , ve, u3 ) J! en p. De esta manera, se pueden transfonnar los puntos en vectores tangentes (y viceversa) por medio
de este isomorfismo canónico. En el caso de las dos secciones siguientes, nos
convendrá con frecuencia p:1sar de un objeto al otro sin cambiar nuestra
notación. Puesto que los objetos correspondientes tienen las mismas coordenadas euclidianas, el cnmbio no puede afectar la multiplicación escalar,
la adición, los productos punto, la diferenciación, ni ninguna otra operación que esté definida en términos ele coordenadas euclidianas.
Por lo tanto, un campo vectorial Y = (y,, y", :v~)" en una cmYa f3 se
convierte en una curva él mismo, que SE'rá (:}·¡,}'"'y") '~n E 1 . En pZ!rticular,
-
75
LAS FÓRMULc\S DE FRENET
si Y es paralelo, sus funciones coordenadas euclidianas serán constantes, de
manera cp1e Y queda identificado con un solo punto ele K'.
En b grometría del espacio se dice c¡ue un jJlrmo en E" consta de todas
las perprnclicu lares a una recta dada en un punto dado. Entoncrs, r'n knguajc n·ctorial, decimos c¡ue el f'!mzo que jJasa j;or p y es ortor;onal a q 7= O
consiste en todos los puntos r de E 3 taks e¡ u e ( r - p) ·q = O. Por el
comentario anterior, podemos representarnos a q como \Teto¡ tang·cnte
en p, como se ve en la figura 2.fJ.
Aquí ya podemos hacer una aproximación informativa a una curva
dada en las inmecliacio;ws de un punto arbitrario ele la curva . .1'\ucstro
fin es enseñar la m;:mcra en que la curvatura y la torsión influyen en la
forma de la cun·a. Para deducir esta aproximación, emplearemos una
aproximación de Taylor a b cm"•;a, y expresaremos este resultado en términos del sistema de referencia de Frenet en el punto en cuestión.
Para tener mayor simplicidad, vamos a considerar la curva de rapidez
unitaria f3 = (/3 1 , {3 2 , {3 3 ) cerca del punto f3(0). Si el valor des es pequeño,
cada coordenada f3; (5) se \·e aproximada estrechamente por el término
inicial de su serie ele Taylor:
s"
ri"f3¡
d"(J¡
j] i ( 5) ,......, /];(O) + df3¡ (O) +
(O)
(O)
+
ds
·
rh·'3
ds"
2
()•
En consecuencia,
f3(s) ,......, j](O) + s(3'(0) +
~
-~~ 8"'(0).
f3"(0) +
1
Pero f3'(0) = T 0 y /3"(0) = KoNo, donde el subíndice nos indica la evaluación en s = O y suponemos que Ko =/= O. Ahora bien,
f3"' = (KN)' =
~>v + K.V'.
Por lo tanto, según la fórmula de Frenet de N', obtenemos
P'"r'O)
.
fJ
=
-
Kue T o
+
di(
u
J (O) "'o
CS
+
KoTo B O·
Por último, tomamos en cuenta estas derivadas y substituimos sus Yalorcs
en la aproximación de (3(s) que hemos dado; entonces, conserYamos sólo
el término dominante de cada componente (es decir, el que contiene la
menor potencia ele s). El resultado es
-
(3(s) ,......, {3(0) + sT 0 +
Ko
-~No+
KoTo
f
Bo.
Si denotamos el miembro derecho ele esta expresiCm por {1 (s), obtenemos
una curva ~ que se llama apro:timación de Frenet de f3 en la cercanía ele
76
CAMPOS DE SISTEMAS DE REFERENCIA
Bo
q
No
Figura 2.9
Figura 2.1 O
s = O. Insistimos en que f3 tiene una aproximación de Frenet diferente en
cada uno de sus puntos; si substituimos O por un número arbitrario s0 ,
entonces s queda reemplazado por s - s0 , como se suele tener en los desarrollos de Taylor.
Vamos a examinar a continuación la aproximación de Frenet que
acabamos de expresar. El primer término de la expresión de {3 es simplemente el punto f3 (O) . Los dos primeros términos nos dzm la recta tangente
S---'? [3(0) + sT0 de f3 en {3(0); ésta es la mejor aproximación lineal de f3
cerca de [3(0). Los tres primeros términos representan la parábola
s---'? [3(0)
+ sT0 +
K0
(s"/2)N 0 ,
que resulta ser la mejor aproximación cuadrática ele ,B en las cercanías de
f3 (O) . Observemos que esta parábola descansa en el plano que pasa
por [3(0) y es ortogonal aBo, y éste es el plano osculante ele f3 en (O). Esta
parábola tif'ne la misma forma que la parábola y = KoX 2 /2 en el plano xy,
y queda determinada por completo por la curvatura Ko de f3 en s = O.
Por último, la torsión To, que aparece como el último término de ~ y
es también el de valor más pequeño, controla el movimiento de f3 en dirección ortogonal a su plano osculante en f3 (O), como se ve en la figura 2.10.
Sobre la base ele estas explicaciones, podemos conjeturar razonablemente que si una cmva de raj1idez unitaria tiene curuatnra idénticamente
cero, entonces, es una recta. De hecho, ésta es una consc>cucncia inmediata
de (2) en el lema 2.3, puesto que K = 11 T' 11 = 11 [3" 11, de manera que
K = O si y sólo si [3" = O. Por lo tanto la curvatura mide, efectivamente,
la desviación de la rectitud.
Diremos que una curva plana en E 3 es una curva que descansa en un
plano de E 3 . Es evidente que una curva plana no se torcerá de manera
LAS FÓRMULAS DE FRENET
-
77
tan interesante como la de la hélice simple del ejemplo 3.3. La explicación
anterior nos hace ver que, si s es pequeílo, la curva f3 tiende a quedarse
en su plano osculante en f3(0); lo que h<1ce que (J se tuerza para ab;¡ndonar el plano osculante es que •o cj~ O. Por lo tanto, si la torsión de f3 es idéntic;¡mente cero, podemos sospech<1r justificadamente que f3 nunca se sale
de este pbno.
Sea f3 una curva de rapwcz unitaria en E·1 en h que
O. Entonces, f3 es una curva plana si y sólo si , = O.
3.5
1<
>
CoROL.'I.RlO.
Demostración. Supongamos que (J es una cun·a plan;¡, Entonces, por
los comentarios anteriores, existen los puntos p y q tales que ((J(s) p) ·q = O p<1ra todo s. La diferenciación resulta en
f$' (S) 'fl = (3" (S) •q = 0
para todos.
B(s)
{3
!3(0)
-----Figura 2.11
Por lo tanto, q es siempre ortogonal a T = (J' y .V = fJ" /K· Pero B también es ortogonal a T y a N, ele manera que, puesto que la longitud de
B es la unidad, B = -+-qj; 1q i!. En consecuencia B' = O, y por definición
T = O (figura 2 .11 ) .
Redprocamente, supongamos que , = O. Entonces, B' e~ O; esto significa que B es paralelo y se le puede identificar (ele acuerdo con el comentario 3.4·) con un punto de E 3 . :\firmaremos que (3 descansa en el plano
que pasa por [3(0) ortogonalmente en relación con B. Para verificar esto,
vamos a considerar la función de valores reales
f(s) = (f3(s) - (3(0)) •B
para todos.
Entonces,
-
rlf = (3'·B = T·B = O
ds
Pero es obvio que
lo tanto,
f (O) =
·
O, de manera que
([3(s) - (J(O)) ·B
=
O
f
es idénticamente cero. Por
para todos,
78
CAMPOS DE SISTEMAS DE REFERENCIA
con lo que vemos que f3 descansa completamente en este plano ortogonal
a la binormal (paralela) de f3.
1
Vimos al final del ejemplo 3.3 que una circunferencia de radio a tiene
curvatura 1 ¡'a y torsión cero. Además, la fórmub. que dimos en ese lugar,
de b normal principal indica que, en una circunfcrcnci;J, X sicmprc apunta al centro. Esto nos sug1ere la manera de demostrar la siguientl' Zifirmación recíproca.
3.6
K
Lr.:~-rA.
>Oy
radio
11
Si f3 es una cun·a ele rapidez unitaria con curvatura constante
torsión cero, entonces fJ forma parte de una circunferencia de
K.
Demostración. Puesto que T = O, f3 es una curva plana, Aquí tenemos
que mostrar que cada punto de f3 está a una distancia 11 K ele un punto
fijo, que será el centro de la circunferencia. Consideremos la curva y =
f3 + ( 11 K) N. Por medio de la hipótesis acerca de f3 y (corno ya es habitual) ele las fórrnubs de Frenet, obtenernos
y'
= f3' + }_ N' = T + ~ (- KT)
=
O.
K
K
En consecuencia, la curva /' es constante; esto significa que f3 (s) +
( 11K) N (s) tiene el mismo valor, que denominaremos e, para todo s (q'asc
la figura 2.12) . Pero la distancia desde e hasta f3 (s) es
d(c, f3(s)) =
11
e - f3(s)
1
11
K
N(s)
K
1
En prmc1pw, podernos rcsoh·er todo problema geométrico acerca de
cun·as por medio de las fórmubs de Frenct. En los casos sc~ncillos, tal
\·cz resulte suficiente anotZJr la información del problema de manera conveniente, diferenciar y aplicar las
fórmulas de Frcnct. Por ejemplo, supongamos que (-J
es una curya de rapidez unitaria que descansa por completo en la esfera ::S de radio a con centro en el ori¡:;cn de
E-1 . Para que quede sobrc la esfera, f3 hcl de curvZJrse;
de hecho, bien podemos conjeturar que la cmTatura
Figura 2.12
mínima posible ocunir:'r cuando /] estú en uno de los
grandes círculos ele :S. Cn círculo de ésos tendrá radio a. ele manera
que nos aventuramos a <lfirm;:¡r que una cun•a esférica (3 tiene curuatura
K==: 1/a. donde a cs el radio de su csfcra.
Para verificar 1·sto, obsclYcmos que, rmrsto qm~ todo punto de ::S dista
a del origen, tenernos que (J•(-J = a". Al diferc·nciar, obtencmos 2f3'•(3 = O,
es decir, (-J•T = O. Una nuc\·a diferenciación nos deja con f3'•T + (J•T' = O,
y al aplicar la fórmula de Fn·net obtenemos T•T + ~</]•.\' = O; en consecuencia,
-
LAS FÓRMULAS DE FRENET
79
r:(3•N = -l.
Por la desigualdad de Schwarz, podemos concluir que
[,G•NI<I[f3[[
JINII=a,
v, debido a que r: ?': O, llegzunos a la conclusión que buscáb;¡mos:
1
K
=
j K
1
=
1
j3•:\'
1
1
a
>-
La continuación de este procedimiento nos !leya a una condición necesaria y suficiente (expresada en términos ele curyatura y torsión) para
que una curYa sea esférica, cs decir, para que descanse en una esfcra de
K; (ejercicio 10).
EJERCICIOS
l. Calcúlese el apwato de Frenet r:, T, T, N, B de la curva de rapidez
unitaria {3 ( s) = ( ~ cos s, 1 - sen s, - ~e os s). Demuéstrese que esta
curva es una circ~~ferencia; encuéntre;1se su centro y su radio.
2. Consideremos la curva
(1
,G(s) = ( .
+
-3
definida en I: -1 < s < l. Hágase ver que {3 ticne rapidez unitaria
y calcúlese su aparato de Frenet.
3. En la hélice del ejemplo 3.3, verifíquense las fórmulas de Frenet al
hacer la substitución directa cn los valores calculados de r:, T, T, N, B.
4. Dt·muéstrese que
T=NXB=-BXX
1\' = B X T
=
-T X B
B=TXN=-NXT.
(La cle111ostración formztl usa de las propiedades del producto cruz que
se \Trific::ron en lus ejercicios ele la sección 1 ; por otra parte, las
fórmulas pueden ser recordada;; por medio de la regla ele mano
derecha que se explicó en la página 62.)
5. Si A es el campo vectorial T T + r:B en una curva de rapiclcz unitaria
(3, demuéstrese que las fórmulas de Frenet se convierten en
T' =A X T
N'= A X N
B' =A X B.
80
CAMPOS DE SISTEMAS DE REFERENCIA
6. Podemos expresar una parametrizaeión de rapidez unitaria de una
circunferencia como
y ( s)
= e
+
r eos s1r c 1
+
r sen s1r e2,
donde C¡"Cj = /3ij·
Si f3 es una curva ele rapidez unitaria en la que K (O) > O, demuéstrese que hay unG, y sobmente una circunferencia y que se
aproximG a f3 en las inmediaciones de {3(0) en el sentido de que
y(O)
=
f3(0),
y' (o)
=
{3' (o) '
y" (O)
y
=
{3" (O).
Hágase ver que y descansa en el plano osculante de f3 en f3(0) y
encuéntrense su centro e y su rGdio r. La circunferencia se llama
circunferencia osculante y e es el centro de curuatura de f3 en f3(0).
(El mismo resultado es válido cuando se recmphza O por cualquier
número s.)
Figura 2.14
Figura 2.13
7. Si a y una rcparGmetrización a= a(h) son ambas cur\'GS de rapidez
unitaria, demuéstrese que
a) h(s) = +s + s0 para algún número s0 •
b) T = +T(hl
N=
N(h)
i<=K(h)
;:=T(h)
B = +B(h)
donde d signo ( +) es igual que en (a), y suponemos que K > O
(figura 2.14). Por consiguiente, aun en el caso de inversión de la
orientación, las normales principGlcs N y N siguen apuntando en
la misma dirección.
8. Curz,as en el plano. En una curva de rapidez unitaria f3(s) =
(x(s), y(s)) en E", la tan[!,ente unitaria es T = {3' = (x', y'), pero
se define la normal unitaria N por medio de la rotación de T que
"
'
1
,,
;
.'!!
N
80
CAMPOS DE SISTEMAS DE REFERENCIA
6. Podemos expresar una parnmetrización de rapidez unitaria de una
circunferencia como
y(s) =e+ r cos sjr e 1
+
r sen sjr e 2 ,
donde ei•ei = Oii·
Si f3 es una curva de rapidez unitaria en la que K (O) :: O, demuéstrese que hay una, y solamente una circunferencia y que se
aproxima a f3 en las inmediaciones de f3(0) en el sentido de que
y(O)
=
/3(0),
y' (o) =
.f3' (o) '
y
y''(O)
=
fi"(O).
Hágase ver que y descansa en el plano osculante de f3 en f3(0) y
encuéntrense su centro e y su radio r. La circunferencia se llama
circunferencia osculante y e es el centro de cun·atura de f3 en f3(0).
(El mismo resultado es \·álido cuando se reemplaza O por cualquier
número s.)
jj
...
Figura 2.13
Figura 2.14
7. Si a y una reparametrización a= a(h) son ambas curvas de rapidez
unitaria, demuéstrese que
a) h(s) = -+-s + s0 p:1ra algún número s0 •
b) T = ±T(hl
N=
N(h)
'K=K(h)
;:=T(h)
B = ±B(h)
donde el signo (-+-) es igual que en (a), y suponemos que K > O
(figura 2. H). Por consiguiente, mm en el caso ele inversión de b
orientación, las normales principales N y N siguen apuntando en
la misma dirección.
8. Curvas en el plano. En una curva de rapidez unitaria f3(s) =
(x(s), y(s)) en E", la tangente unitaria es T = fi' = (x', y'), pero
se define la normal unitaria N por medio de b rotación de T que
recorre + 90°, de manera que N = (-y', x'). Por lo tanto, T' y ,V
son colineales, y se define la curvatura de fJ por medio ele la ecuación
de Frenct T' = KS. Demuéstrese que
CURVAS DE RAPIDEZ ARBITRARIA
81
a) N'= -KT.
b) Si '? es el ángulo de la pendientet de (3, entonces K = cp'.
Este procedimiento difiere del que se emplea en E 3 , puesto que
aquí no es necesario que K sea pos1t1vo; antes bien, su signo nos dice
en qué dirección da vuelta (3. Además, se define N sin suponer que
-
K>
0.
9. Sea íJ la aproximación de Frenet a una curva arbitraria de ·rapidez
unitaria f3 en las inmediaciones de s = O. Si quisiéramos retirar la
componente B 0 de
p,
la curva que resultaría se llama proyección
ortogonal de ~ en el plano T 0 N 0 • Es el aspecto que presenta
íJ ,. . , f3
si se le observa al mirar directamente hacia íJ (O) = f3 (O) a lo largc
del vector B 0 • Trácense las formas generales de las proyecciones ortogonales de cada uno de los planos T 0 N 0 , T 0 B 0 , N 0 B 0 , con la suposición
de que T > O. (Estos aspectos de f3 se pueden confirmar expenmentalmente por medio de un trozo curvo de alambre.)
-
10. Curvas esféricas. Sea a una curva de rapidez unitaria en la que
K> o, To:j=O.
a) Si a descansa en una esfera con centro en e y radio r, demuéstrese que
a - e= - pN- p'aB,
donde p = ljK y a= 1/T. Por lo tanto, r 2 = p2 + (p'a)2.
b) De manera recíproca, si p2 + (p'a) 2 tiene el valor constante r 2 y
si p' of= O, demuéstrese que a descansa en una esfera de radio r.
(Indicación: en b), demuéstrese que la "curva central" y = a +
pN + p' aB -sugerida por a)- es constante.)
11. Sean f3 y fJ: 1--;. Ea curvas de rapidez unitaria de curvatura y torsión
que no se anulan. Si T = T, entonces f3 y son paralelas ( ejercicio
8 de II.2). Si B = B, demuéstrese que fJ es paralela o bien a ,B o bien
a la curva s --;. - f3 (s) .
/3
4
-
Curvas de rapidez arbitraria
La adaptación de los resultados de la seccwn anterior al estudio de una
curva regular a: 1--;. E3 , que no tiene necesariamente rapidez unitaria, es un
asunto sencillo. Simplemente transferimos a a el aparato de Frenet que
corresponde a una parametrizarión de rapidez unitaria a de a. De manera
"f La existencia de rp como función difcrenciablc en la que T = cos rp U,
sen rp Uo se desprende del ejercicio 12 de la sección l.
+
82
CAMPOS DE SISTEMAS DE REFERENCIA
más explícita, si s es una función arbitraria de longitud de arco de a, como
se tenía en el teorema 2.1, entonces,
a(t)
=
a(s(t))
para todo t
o, en la notación funcional, a= a(s). Ahora bien, si K> O y si 7, T, N y B
se han definido para a como se hizo en la sección 3, definimos en relación
con a
la
la
el
el
el
función de curvatura: K = K(s)
función de torsión: r = 7 ( s)
campo vectorial tangente unitario: T = T ( s)
campo vectorial normal principal: N= N(s)
campo vectorial binormal: B = B (s)
En general, K y K son funciones diferentes, definidas en intervalos clistintos. Pero dan exactamente la misma descripción de las vueltas que hay
en la trayectoria común de a y a, puesto que, en cualquier punto a ( t) =
a ( s ( t) 1, los números K ( t) y K( s ( t) ) son, por definición, iguales. Lo mismo
sucede con el resto del aparato de Frenet; el significado geométrico fundamental es el mismo, pues solamente interviene en la diferencia un cambio
de parametrización. En particular, T, N, B vuelve a ser un campo de
sistemas de referencia en a, vinculado a la forma de a de la manera que
hemos indicado en la explicación de las aproximaciones de Frenet.
( t
s(t)
Figura 2.15
En el trabajo puramente teórico, a menudo no hay que hac~~r más que
esta simple transfcrenci;1. La inform:1ción :1ccrca de a se conYicrte en datos
acerca de la rcpalal!ll'trÍz:lción de rapidez unitaria a; Jos resultados con
respecto a <X se convierten en resultados con respecto a a. Por ejemplo,
si a es una curva regular en la que ·r = O, entonces, por la definición
anterior, a tiene 7 = (): por el corolario 3.5, a es una curva plana, de
manera que a también lo es obYiamcnte.
Sin embargo, en los cúlculos num(ricos y explícitos -~y a Ycccs también
en la teoría--· la transferencia no es práctica, puesto que es raro encontrar
83
CURVAS DE RAPIDEZ ARBITRARIA
-
fórmulas explícitas de á. (Por ejemplo, inténtcsc encontrar una paramctrización de rapidez unitaria ele la curva a ( t) o= ( t, t", t 3 ).)
Las fórmulas de Frenet son válidas no sólo par:1 las curvas de rapidez
unitaria; con ellas tambi(:n determinamos la tasa ele cambio del sistema
de referencia T, N, B con respecto a la longitud de arco. Sin embargo, el
factor adecuado de corrt"cción es, en el caso generaL la rapidez v ele la
curva.
4.1 I .EMA. Si a es una cmTa regular en E'J con
T'
.Y'
B'
> O,
entonces,
Kc!N
=
=
K
+
":·T
-
,vB.
-TvN
Demostración. Sea a una reparametrización de rapidez unitaria de o:.
Entonces, por definición, T = T(s), donde s es una función ele longitud
de arco ele o:. Se aplica la regla de la cadena a la difPrenciación ele campos
vectoriales (ejercicio 7 de la sección 2) y se obtienp
T'
=
T' (S)
~;.
Por las ecuaciones habituales de Frenet, T'
s en esta ecuación, se obtiene
T' (S)
=
=
i<.N. Al substituir la función
K(S) N (S) = KN
gracias a la definición de K y de N en el caso de rapidez arbitraria. Puesto
que ds/ dt es la función de rapidez v de a, estas dos ecuaciones se combinan
y resultan en T' = KVN. Las fórmulas de N' y B' se deducen de la m1sma
manera.
1
-
En cálculo, hay una notación de uso común que hace caso totalmente
omiso del cambio de parametrización. Por ejemplo, la misma letra designa
tanto un;< cmYa a como su parametrización de rapidez unitaria a, y lo
mismo se hace con el aparato de Frenet correspondiente a cada una
ele las dos curvas. Las diferencias de las deri\adas se resuelven al poner,
por ejemplo dT / dt como T', y dT 1ds para o bien T' o su reparametriz;-¡ción T'(s). Con estas convenciones, en la demostración anterior, se combinan la regla de la cadena dTidt = (dTfds) (ds¡'dt) y la fónnula ele
Frclwt dT 1ds = KN, de lo que resulta dTI dt o= Ki':Y.
La aceleración será ortu~orwl a la Yeloricbcl súlo en curYas de rajJidez
constan[(', puesto que la romtancia de (3'·P' equiYalc a (P'·¡'f')' =
'..!.{3'-,B" = O. En el caso general, an~1liz;nnos la velocidad y la aceleración
al expresarlas en términos del campo ele sistCJllas dl' referencia dt: Frenct.
84
CAMPOS DE SISTEMAS DE REFERENCIA
a' == vT
'
\
~-------~' a"
Figura 2.16
4.2. LE;-vrA. Si a es una curva regular cuya función de rapidez es v,
en ton ces la velocidad y la aceleración ele a está dadas por (figura 2.16)
a'= vT
Demostración. Puesto que a= a(s), dondes es la función ele longitud
de arco de a, descubrimos, gracias al lema 4.5 del capítulo I, que
ds = vT
- ( s ) = vT.
a ' = -a ' (s) --dt
Entonces, una segunda diferenciación resulta en
a"
= dv T
dt
donde empleamos el lema 4.1.
+
c•T' = dv T
dt
+
KV 2N
1
La fórmula a' = vT era de esperarse: a' y T son ambas tangentes
a la curva, y T tiene una longitud unitaria, mientras que 11 a' 11 = v. La
fórmula ele aceleración es más interesante. Por definición, a" es la tasa
ele cambio de la vclociclacl a', y, en general, tanto la longitud como la
dirección de a' cambian. La comj;onente tangencial (dvjdt)T ele a" mide
la tasa de cambio de b longitud de a' (es decir, de la rapidez de a). La
comjJone11te normal KVc]\! miele la tasa de cambio de la dirección de a'.
Las leyes del mo\imicnto de ~e\\·ton nos enseñan que podemos experimentar estas componentes como fuerzas. Por ejemplo, en un coche que va
por una carretera recta y que acelera o disminuye su rapidez, la única
fuerza que sienten los pasajeros se debe a ( dv j dt) T. Si se toma una curva
sin inclinación con rapidez v, la fuerza lateral que se experimenta se debe
a KV 2N. Aquí K nos mide la agudeza ele la vuelta del camino; el efecto
de la rapidez se determina por v2 , de manera que tomar la curva a 60
kilómetros por hora es cuatro veces más inestable que tomarla a 30.
...
85
CURVAS DE RAPIDEZ ARBITRARIA
A continuación encontraremos expresiones efecti\'amente calculables
del aparato de Frenet.
4.3
TEOREMA.
=
a' 11[ a'
,\' =
B X T
T
Sea a una curva regular t>n E". Entonces,
1[
:r
¡¡a
/{
B = a' X a" 1¡/ a' X a" ji
1
X
a
//[11'1
¡:;:~ti¡"
t'l"
((l.' X a ") <>e: "' 1111, a 'X ,/'
u..
flz.
Demostración. Puesto que v = 11 ~t' l i > O, b fórmula
equivale a a' = vT. Por el lema anterior, tenernos
(~¡ T + /(vW)
a' X a"= (vT) X
debido a que 11 B 11 = 1, /( > O y v > O. En cff'cto, esta ecuación nos cnseíi.a
O equivale a la condición habitual
que en curvas regulares, 11 a' X ~t" 11
/( > O. (De esta manera, cmmdo /( > O, e/ y a" son linealmente independientes y determinan el plano osculante en cada punto, como lo hacen
T y N.) Entonces,
>
B=
e/ X a"
a' X a"
11 a ' X a "11'
11
:\hora bien, N = B X T en cualquier campo de sistemas ele referencia
ele Frenet (ejercicio 4 de la sección 3) ; por consiguiente, sólo nos falta
demostrar la fórmula de la torsión. Para encontrar el valor del producto
escalar (~t' X a")•a"', expresaremos todo en términos de T, N, B. Ya
sabemos que a' X a" = /(v''B. Por lo tanto, puesto que O = T•B = N•B,
solamente necesitamos encontrar la componente B de a"'. Pero
a
"' = (dv-di T+ "N) ,= ' N' +
/(v-
J(V"
donde utilizamos el lema 4.1. En consecuenCia (a' X a") •a"' = /("v",,
y put'sto que 11 a' X a" 11 = /(¡:", ya tenemos la fórmula que queríamos
de '·
1
El triple producto escalar de esta fórmula ele , también se puede
(gracias al ejercicio 4 ele la sección 1) expresar como a'•a" X a"'. Pero
86
CAMPOS DE
SISTEMAS DE REFERENCTA
de cualquier modo nccrsitamos tener a' X o:". de manera qur suele ;;er
más sencillo r·ncontr:1r (a' X r/') •e/".
4.4 Ep::--rPLO. C;1lcubrcrncs el ap;n;:¡to dr Frenct ck la cu1Y:t
a(t)
(3t - t 3 , 3t". 3t
=
+
t 3 ).
Las derivadas son
a'(t) = 3(1- t", 2t, 1
a"(t) = 6( -t, 1, t)
a"'(t) = 6( -1, O, 1).
+n
Ahora bien,
+ 2t" +
a'(t)•a'(t) = 18(1
t 4 ),
de manera que
V ( t)
=
11
a' ( t)
ylS(1 + t").
11
Al aplicar la definición de producto vectorial, obtenemos
a'(t) X a"(t)
18
1
+
2t
1 - t2
18(-1 +te, -2t, 1
t"
+
t 2 ).
-t
1
Y al hacer el producto escalar de este vector consigo mismo, tenemos
En consecuencia,
11
a' ( t) X a" ( t)
11
+
18 y'2 ( 1
=
t2 )
•
Las expresiOnes antniores de a' X a" y a"' resultan en
(a' X o:") •a'" = 6 · 18 · 2.
Solamente nos falta substituir esta información en las fórmulas del teorema 4.3, con N calculado por medio de otro producto vectorial. Los resultados finales son
T
=
( 1 - t 2 , 2t, 1
+ t2)
---------·
vi(1 +
t2)
(-2t, 1- t 2 ,0)
N = ---------
.
1
B
=
(
-1
+ [2
+
t 2,
-
2t, 1
v2( 1 + t
t<=-r=
1
---·--
3(1
+
t 2 ~..,
2
)
+
t2)
CURVAS DE RAPIDEZ ARBITRARIA
87
Al proceder alternativamente, podríamos emplear la información del
lema 1.8 para calcular 11 a' X a" 11, y expresar
(a' X a")•cl"
=
a'•(a" X a'")
como determinante, según el ejercicio 4 de la sección l.
Vamos a resumir la situación. Tenemos a estas alturas el aparato de
Frenet que corresponde a una curva de rapidez arbitraria a. Este aparato
sirTe también para las fórmulas ele Frenet en su extensión (con el factor v)
y se pueden calcular por medio del resultado del teorema 4.3. Si v = 1,
T(s)
Figura 2.17
es decir, si a es una curva de rapidez unitaria, las fórmulas ele Frenet del
lema 4.1 se simplifican ligeramente (en el teorema 3.2), pero se puede
reemplazar el teorema 4.3 por las definiciones mucho más sencillas de la
sección 3.
Consideremos a continuación algunas aplicaciones de los resultados
de esta sección. Hay varias maneras interesantes de asignar a una curva
dada f3 una nueva curva f3 con propiedades geométricas que aclaran algunos aspectos del comportamiento de f3. Por ejemplo, si f3 es una curva
ele rapidez unitaria, la curva o- = T es la imagen esférica ele f3. De acuerdo
con el comentario 3.4, o- es la curva con la propiedad ele que cada punto
o-(s) tiene las mismas coordenadas euclidianas que el vector tangente unitario T(s) (figura 2.17). Si hablamos sin mucha precisión, o-(s) se obtiene
al llevar T(s) al origen. La imagen esférica descansa completamente sobre
la esfera unitaria 2: de E 3 , puesto que 11 o- 1! = JI T 11 = 1, y el movimiento
de o- representa el curvamiento de f3.
Por ejemplo, si f3 es la hélice del ejemplo 3.3, la f6rmula que se da
allí de T nos hace ver que
o-(s)
= (-
~ sen
;,
~ cos ~' ~).
Por lo tanto, la imagen esférica de una hélice descansa en el círculo que
corta de la esfera unitaria el plano z = b /e.
88
CAMPOS DE SISTEMAS DE REFERENCIA
No se pierde generalidad al suponer que la curva original (3 tiene
rapidez unitaria, pero no podemos esperar que a también sea de rapidez
unitaria. De hecho, puesto que a = T, tenemos a' = T' = KN. Por lo
tanto, a se mueve siempre en la dirección de la normal principal de (3,
con rapidez 11 a' 11 igual a la curvatura K de (3.
Supondremos a continuación que K > O y emplearemos las fórmulas
de Frenet de (3 para calcular la curvatura de a. Ahora bien,
a
11
Por lo tanto,
Por el teorema 4.3, la curvatura de la imagen esférica a es
K
a
=
K
(1 + (--T)")l/2 >
K
y, de esta manera, depende solamente de la razón de la torsión a la curvatura de la curva original (3.
He aquí una aplicación estrechamente relacionada en la que la razón
T /K resulta ser decisiva.
4.5 DEFH\ICIÓ)I. Se dice que una curva regular a en E'l es una hélice
cilíndrica cuando la tangente unitaria T de a forma un ángulo constante
{} con algún vector unitario fijo u; es decir, T(t) •u = cm,{} para todo t.
Esta condición no se ve alterada por la rcparametrización, de modo
que, para fines teóricos, necesitamos estudiar solamente una hélice cilíndrica (3 con rapidez unitaria. De manera que supondremos que (3 es una
curva de rapidez unitaria en la que T•u = cos {}, Si escogemos un punto
de referencia, por ejemplo, (3(0), en (3, entonces la función de valores
reales
h(s) = ((3(s) - (3(0) )•u
nos dice cuán alto se "alza" (3(s) en la dirección de u desde que sale de
(3(0) (figura 2.18). Pero también
d_h = (3'·u = T·u = cos {}
ds
de manera que (3 se alza con una tasa constante en relación con la longitud de arco, y h ( s) = s cos {}. (Si nos desplazamos a una parametrización arbitraria, esta fórmula se convierte en
89
CURVAS DE RAPIDEZ ARBITRARIA
h ( t) =
S (
t)
COS {},
donde s es la función de longitud de arco.)
Al trazar una recta por cada punto de f3 en la dirección de u, construimos un cilindro generalizado C en el que se mueve f3 de manera que
corta cada regladura (o "elemento") a un ángulo constante 1'J, como se
(3(s)
ul)
.~(O)
Figura 2.19
Figura 2.18
ve en la figura 2.19. En el caso especial en que este cilindro es circular,
f3 es evidentemente una hélice del tipo definido en el ejemplo 3.3.
Resulta muy fácil identificar hélices cilíndricas.
4.6 TEOREMA. U na curva regular a en la que
cilíndrica si y sólo si la razón T 1K es constante.
K
>O
es una hélice
Demostración. Es suficiente que consideremos el caso en que a tiene
rapidez unitaria. Si a es una hélice cilíndrica en la que T•u = cos {},
entonces
O= (T•u)' = T'•u = KN•u.
Puesto que K > O, concluimos que N·u = O. Por lo tanto, en cada s, u está
en el plano determinado por T (s) y B (s) . El desarrollo ortonorrnal resulta en
u = cos {}
T
+ sen{} B.
Como es habitual, diferenciamos y aplicamos las fórmulas de Frenet para
obtener
O = (K eos {} En consecuencia,
tante cot {}.
T
sen {}
T
sen {}) N.
= K eos {}, de manera que T 1K tiene e1 valor cons-
90
CAMPOS DE SISTEMAS DE REFERENCIA
Recíprocamente, supongamos que
lo {} tal que cot {} = T/K. Si
T/K
es constante. Tomemos un ángu-
= cos {} T + sen {} B,
U
descubrimos que
U' = (K cos {} - T sen{}) N = O.
Este campo vectorial paralelo U determina, entonces (como teníamos en
el comentario 3.4), determina un vector unitario u con la propiedad de
que T•u = cos {}, de manera que a es una hélice cilíndrica.
1
Esta demostración también nos enseí'ía la manera de calcular el vector
unitario u y el ángulo {}. Por ejemplo, la curva a del ejemplo 4.4 es una
hélice cilíndrica, puesto que allí K = T. El ángulo {f cumple la igualdad
cot {} =
T/K =
1; tomamos {} = "/4. Entonces cos {} = sen{} = 1
-12,
de
manera que, por la demostración anterior, u = ( 1/ v2) (T + B). Entonces, la información del ejemplo 4.4 resulta en u = (0, O, 1). (No es necesario convertir a a en una curva de rapidez unitaria; con eso no haríamos
sino reparametrizar K, T, T y B, sin afectar ni a {} ni a u.)
En el ejercicio 10, la información acerca de las hélices cilíndricas se
usa para verificar que las hélices circulares se caracterizan por la constancia de la curvatura y la torsión (véase también el corolario 5.5 del
capítulo III.)
Es así como hipótesis sencillas acerca de una curva regular en E 3 tienen los efectos siguientes ( (=) quiere decir "si y sólo si") :
K =
Ü
(=)recta
T=O
K
K
>Oy
constante > O y
constante
T/K constante
(=)curva plana
T
= O
T
constante
*
(=)circunferencia
O
(=) hélice circular
(=) hélice cilíndrica
EJERCICIOS
1. Consideremos la curv:1 a: R-e> E 3 t:1l que a(t) = (2t, t~, t 3 , /3).
a) Calcúlese el ap:1rato de Frenct de a: K, T, T, .1\'. R.
b) Hágase un dibujo cuicbdoso de esta culTa para -4 < t :o:; 4,
donde se \·can T, N y B en los valores t = O, 2, 4. (lndicaciún:
empiécesr con su proyección (2t, t", O) en el plano xy.)
e) Encuéntrese la posición límite del sistema de referencia de Frenct
T, N, B de a cuando t --'> + ctJ y t--'> - ctJ.
91
CURVAS DE RAPIDEZ ARniTRARIA
2. Calcúlese el aparato de Frenet de la curva a ( t)
(cosh t, senh t, t).
Exprésense la curvatura y la torsión de a como funciones K (s) y r (s)
de longitud ele arco s medida a partir ele t = O.
3. En la curva a(t) = (t cos t, t sen t, t),
a) calcúlese el aparato de Frenet en t = O. (Evalúense a' a", a"'
en t = O sin acudir al teorema 4.3.)
b) trácese esta curva para - 2,. :S t < 2,., ele manera que se ·vean T,
N, B en t =O. (Inrlicación: ejercicio 2 de II.2.)
4. En la curva a del ejemplo 4.4, verifíquese la validez del lema 4.2 por
medio de la substitución directa. Hágase un dibujo a escala, en el
que se vean los vecton'S T(O), N(O), a'(O) y a"(O).
S. Demuéstrese que la curvatura de una curva regular en E 3 está dada
por
6. Si a es una curva de rapidez constante e
T = a'/ e
N = a"/ [ a" i]
- a ' X a "/ C
B -
K=
11
> O,
demuéstrese que
a" 11/c~
a' X a" •a'"
1
1[ a "
1
'!
T=
1
donde suponernos que, para N, B, r, a" no es nunca cero, es decir,
que
K>
O.
7. Empléense las fórmulas del ejercicio anterior para calcular el aparato
de Frenet correspondiente a la hélice a del ejemplo 4.2 del capítulo J.
8. Sea a una hélice cilíndrica con vector unitario u, ángulo {} y función
ele longitud ele arco s (medida a partir de, por ejemplo, t = O.) La
curva única y con la propiedad ele que a ( t) = 1 ( t) + s ( t) cos {} u
se llama curua de sección transversal del cilindro sobre el que descansa a. Demuéstrese que
a) 1 descansa en el plano que pasa por a (O) y es ortogonal a u.
b 1 La curvatura de 1 es Kjsen 2 {}, donde K es la curvatura de a.
(1ndicación: en ( b) es suficiente suponer que a tiene rapidez
unitaria.)
9. (Continuación). Las curvas siguientes son hélict's cilíndricas; en cada
una se deben encontrar el vector unitario u, el ::ngulo D y la curva de
sección transversal 1 ; verifíquese la condición (a) del ejercicio anterior.
92
CAMPOS DE SISTEMAS DE REFERENCIA
a) La curva del ejercicio l.
b) La curva del ejemplo 4.1
e) La curva del ejercicio 2.
1O. Si f3 es una curva de rapidez unitaria en la que K > O y r
=/= O, ambos
con valores constantes, demuéstrese que f3 es una hélice (circular).
11. Sea a la imagen esférica (sección 4) de una cun·a de rapide•z
taria f3. Demuéstrese que b curvatura y la torsión de a son
T
donde
K
W11-
= _(rl_fds) (T/K)
"
K[1
+
(T/K)"]
y r son la cmTatura y la torsión de f3.
12. a) Demuéstrese que una curva es hélice cil;ndrica si y sólo si su imagen
esférica es parte de una circunferencia. (No es necesario hacer
cálculos aquí.)
b) Trácese la imagen esférica ele la hélice cilíndrica del ejercicio l.
¿Es una circunferencia completa? Encuéntrese su centro.
13. Si a es una curva en la que K > O, entonces la curva central a"' = a +
(1/K)N consiste en todos los centros ele curvatura de a (ejercicio 6 ele
II.3). Para cualesquiera dos números a y b distintos ele e pro, sea f3ab
la hélice ele! ejemplo 3.3. Demuéstrese que la curva central de f3ab es
f3ab, donde d = - b 2/a. Dcdúzc<1se que la curva central de (J~b es la
hélice original f3ab·
14. Si a(t) = (x(t), y(t)) es una curva regular en E 2 , demuéstrese que
su curvatura (ejercicio 8, II.3) es
x' y" - x" y'
K=
Aquí
J
-(~'"+y'") :J/2 •
es el operador tal que
J(t 1 , t 2 ) = ( -tz, t1).
15. Con respecto a una curva regular a en E 2 , la curva central a* = a +
(1/K)N se llama evoluta de a. (Por supuesto, no está definida en los
puntos en que K = O.)
a) Demuéstrese que a"' está determinada ele manera única por la
condición de que su recta tangente en cada punto a"' ( t) es la recta normal a a en a(t).
b) Demuéstrese que
1
...
a'· = a
+
a •a
1
a"--;.] (a'f
]( ')
(la notación es la del ejercicio 14).
a
93
CURVAS DE RAPIDEZ ARBITRARIA
e) Encuéntrese la evoluta de la cicloide
a ( t) = (t
+ sen t, 1 +
cos t),
-7T
<t <
7T.
Trácense las dos curvas.
16. La curvatura total de una cun·a de rapidez unitaria a definida en
1, es f I K (s) ds (ésta es una integral impropia cuando el intervalo
es infinito). Si a no es más que regular, la definición se col'\ vierte en
f¡ K ( t) u ( t) dt; esto hace a la curvatura total independiente de la
parametrizaeión de a. Encuéntrense las curvaturas totales de las curvas siguientes; las tres primeras están definidas en toda la recta real.
a) La curva del ejemplo 4.4.
b) La hélice del ejemplo 3.3.
e) La curva del ejercicio 2.
d) La elipse a ( t) = (a cos t, b sen t). Puesto que esta curva es cerrada, considérese solamente un período O< t < 21r.
17. Sean f > O y g funciones cliferenciablt>s arbitrarias de valores reales
definidas en un intervalo ele R. Considérese la curva
a ( t) =
(f f (t)
sen t,
Jf (
Jf (
t) cos t,
t) g ( t) )
donde f h denota cualquier función cuya derivada sea h. Demuéstrese
que la curvatura y la torsión ele a están dadas por
r=
1 8. Considérese la curva cúbica general y ( t)
:¡'=0.
a) Calcúlese
=
( at,
bt2 , ct 3 ), donde abe
y dcdúzcase que b curva cúbica y es una hélice cilíndrica si y sólo
si 3ae = +2b 2 •
b) En el caso en que 3ac = 2b 2 , encuéntrense el vector unitario u
y el ángulo {).
-
19. U no de los recursos ingeniosos del cálculo aYzmzaclo es la construcción de una funcién (infinitamente) diferenciable f C'll la recta real
con la propiedad de que f(t) =O para t <O, y f(t) >O para t >O.
(Además, f"(t) >O para t > 0.) Si g(t) = f( -t), consideremos la
curva
a(t)
=
(t, f(t), g(t)).
94
CAMPOS DE SISTEMAS DE REFERENCIA
a) Demuéstrese que la curvatura de a es cero sólo cuando t = O.
b) Trácese esta curva para valores pequeños de t y muéstrense nlgunas de las normales principales en t > O y en t < O.
1
1
En este ejemplo se ve que la condición K > O no se puede evitar en
un estudio detallado de la geometría de bs curvas de E\ pues si K es
cero --aunque sea en un solo punto- el carúcter geométrico de l2t cun·a
puede cambiar radicalmente en ese punto. (Adviértase que esta dificultad
no es seria en las curvas ele E~; vénse d ejercicio 8 de II.3.)
5
Derivadas covariantes
En el capítulo I, en cada definición de un objeto nuevo (CUlTa, forma
diferencial, mapeo, ... ) solíamos definir, a continuación, una idea adecuada de la derivada del objeto en cuestión. Los campos \Tctoriales fueron
una excepción a este proceder; hemos propuesto la definición de sus derivadas, debido a que (como se verá en resultados posteriores) esta idea
corresponde propiamente a la geometría del espacio euclidiano.
La definición viene a generalizar la de la derivada v[.f] de una función f con respecto al vector tangente v en un punto p (definición 3.1 del
capítulo I). De hecho, al recmpbzar f por un campo \Cctorial W, observamos que la función t---¿ fV ( p + tv) es un campo vectorial en la cun·a
t ~ p + tv. (La derivada de un campo vectorial así se definió en la sección 2.) Ahora bien, la derivada de W con respecto a v será la derivada de
t ~ W(p + tv) en t =O.
5.1 DEFINICIÓN. Sea W un campo vectorial en E" y sea v un vector
tangente a E" en el punto p. Entonces la deriz•ada covariante de Jil1 con
respecto a v es el vector tangente
w
Figura 2.20
95
DERIVADAS COVARIANTES
'V ,.W = W ( p + tv) ' (O)
en el punto p.
Es evidente que 'V ,.W mide la rapidez inicial de variación de W (p) a
medida que p se desjJ!aza en la dirección v (figura 2.20). (El término
"covariante" proYif'ne de la generalización de esta idea que se explica
en el capítulo \'II.)
Por ejemplo, supongamos que W = x~U 1 + yxT ~ ~, y que v = (- 1, O, 2)
en
p = (2, 1, O)
Entonces,
+
p
tv
=
(2 - t, 1, 2t),
de manera que
W(p
+
= (2 - t) 2 U1 + 2tU 3 ,
tv)
ul
donde, en un sentido estricto,
Por consiguiente,
'VvW
=
W(p
+
y u2 también se evalúan en p
tv)'(O)
=
-4Udp)
+
+
tv.
2U3 (p).
Si W = ~ w;U; es un campo vectorial en E 3 y si v es un
vector tangente en p, entonces,
5.2
LEMA.
Demostración. Tenemos que
W(p
+
ty)
=
~ wi(P
+ tv)
U;(p
+ tv)
en la restricción ele W a la curva t ~ p + tv. Para diferenciar un campo
vectorial así (en t = O), se diferencian sencillamente sus coordenadas
euclidianas (en t = O). Pero, según la df'finición de la derivada dircccioml
(definición 3.1 del capítulo I), la derivada de w;(p + tv) en t =O es
precisamente v[wi]· Es así como
'VvW = W(p
-
+
tv)'(O) =
2: v[w;]
U;(p).
1
Con brevedad, para ajJlicar 'V v a un campo vectorial, se aplica v a sus
coordenadas euclidianas. Es Ztsi como se c!Psprcndcn de las propiedades
correspondientes (teorema 3.3 cid capítulo I) de las derivadas direccionales
las siguientPS propiedades de LPibniz y ele linealidad de la clrrivacla cavariante.
5.3 TEOREMA. Se;m v y w \Tctores tangentes a E'3 en p, y sean Y v Z
L·ampos \Tctorialc'; en E". Entonces,
96
CAMPOS DE SISTEMAS DE REFERENCIA
l. \7 av,bwY = a\7 vY + b \7 wY, para todos los números a y b.
2. 'Vv(aY + bZ) = a\i'vY + b\7 1Z, para todos los números a y b.
3. 'Vv(fY) = v[f]Y(p) + f(p) \i'vY, para todas las funciones (diferenciables) f.
4. v[Y·Z] = 'VvY·Z(p) + Y(p)•\i'vZ.
Demostración.
Demostraremos 4, por ejemplo. Si
y
z
=
:¿ ZiUi,
entonces
Y·Z = 2: YiZi.
En consecuencia, por el teorema 3.3 del capítulo I,
v[Y•ZJ = v[2:y;zi] = 2:v[yi]Zi(p)
+ '2:yi(p)
v[zi]
Pero, por el lema anterior,
V
Y las dos sumas que acabamos de exhibir son precisamente 'VvY•Z(p) y
Y(p)·'VvZ.
Por medio del principio de operar punto por punto (capítulo I, sección 2) una vez más, podemos tomar la derivada covariante de un campo
vectorial W con respecto a un campo vectorial V, en lugar de hacerlo
con respecto a un solo vector tangente v. El resultado es el campo vectorial
\7 vW cuyo valor en cada punto p es \7 vcvl W. Por lo tanto, \7 vW consiste
en todas las derivadas covariantes de W con respecto a los vectores de V.
Del lema anterior se desprende inmediatamente que si Tt'" = '2: wiUi,
entonces,
1
\i'vW
=
,'2: V[wi]Ui.
Los cálculos de coordenadas son fáciles de hacer si se acude a la
identidad fundamental Ui[f] = ofj,ox;. Por ejemplo, supongamos que
V= (y- x) U1 + xyU 3 y que (como teníamos en el ejemplo anterior)
W = x 2 U1 + yzUs. Entonces,
V[x 2 ] = (y- x) U1[x 2 ] = 2x(y- x)
V[yz] = xyU 3 [yz] = xy2
Por consiguiente,
Ahora bien, hemos tomado el campo vectorial V pensando en el ejemplo
anterior. De hecho, el valor de V en p = (2, 1, O) es
97
DERIVADAS COVARIANTES
V(p)
(1 - 2) Ul(p)
+
2Us(p) = ( -1,
o, 2)
p
=
Vp,
como teníamos antes. Es así como el valor del campo vectorial \7 v W en
este punto p debe corresponder nl cálculo anterior de \7,.~11. Y tenemos
que si p = (2, 1, O),
Con respecto a la derivada covarinnte \7 vfV expresada por completo en
términos de campos vcctorinles, las propiedades del teorema nnterior tomnn
esta forma:
5.4 CoROLARIO. Senn los campos vectoriales en E" V, ~11, Y y Z.
Entonces,
1) \7r(aY + bZ) = a\7vY + b\7vZ, para todos los números a y b.
2) \7JY+gn-Y = f\7rY + g\7wY, para todas las funciones f y g.
3) \7 v (fY) = V[f]Y + f\7 rY, para todas las funciones f.
ij V[Y•ZJ
\7vY·Z
=
+
Y·\7vZ.
Omitiremos la demostración, que es un ejercicio en el empleo ele paréntesis que se basa en el principio de operar punto por punto, que sirvió par:t
definir (\7rY) (p) = \7runY.
Hay que advertir que \7rY no se comporta ele manera simétrica con
respecto a V y Y. Esto era de esperarse, puesto que lo que se diferencia
es Y, mientras que el papel que desempeña V es simplemente algebraico.
En particular, \7¡r·Y es f'VrY, mientras que \7v(/Y) no es f\7yY: hay
un término adicional. que proviene de la diferenciación ele f por V.
EJERCICIOS
1. Considérese d vector tangente v = ( 1, -1, 2) en el punto p =
( 1, 3, -1). Calcúlese directnml'nte \7 1· W, a partir de b definición, en
los casos en que
a! W
=
x"U 1
+ y U~.
b) W
=
xU 1
+
x"U~
- z"U;,.
2. Sea V= -y[], + xU 2
y SC'a
W = cos xU1 +sen xUe.
Exprésense las derivadas covariantes siguientes en términos ele U1,
Ue, U:,:
a) \7vW.
-
b) \7yV.
e) \7dz"W).
d) \7 11 (V).
e) \7v( \7vW).
f) \7v(xV- zW).
3. Si W es un campo vectorial ele longitud constante igual a ! 1 W 11, demuéstrese que, para cualquier campo vectorial V, la derivada covarinnte
\7 v W es ortogonal en todas. partes a W.
98
CAMPOS DE SISTEMAS DE REFERENCIA
4. Sea X el campo vectorial especial :¿ xiUi, donde x 1 , Xc, x, son las
funciones coordenadas naturales en E''. Demuéstrese que 'V vX = V
en todo campo vectorial V.
5. Si W = :¿ wiUi rs un rampo vectorial en E', la diferencial co~·ariante
ele W se define como 'VW = ¿ dwiUi. Aquí 'VW es la funci/m en
todos los vectores tangentes cuyo \'alor en v es
Calcúlese la diferencial covariantc de
y empléese para encontrar 'V vW, donde
a) v = (1,0, -3) en p = (-1,2, -1).
b) v = (-1,2, -1) en p = (1,3,2).
6. Sea W un campo vectorial definido en una regwn que contiene una
curva a. Entonces t ~ W (a ( t) ) es un campo vectorial en que se llama
restricción de W a a y se denota por vV a·
a) Demuéstrese que 'V"'ctJW = (W")'(t).
b) Dedúzcase que la recta de la definición 5.1 se puede reemplazar
por cualquier curva con velocidad inicial v. Por consiguiente, la
derivada Y' de un campo vectorial Y en una curva a es (casi)
'V"·Y.
7. El corchete ele dos campos vectoriales es el campo vectorial [V, vVJ =
'V v W - 'V w V. Establézcanse las propiedades siguientes del corchete:
a) [V, W][fl = VW[f] - WV[f] (aquí VW[f] nos denota la "segunda
derivada" V[W[fJJ),
b) [TV, V]= -[V, W].
e) [U, [V, W]] + [V, [W, U]]+ [W, [U, V]] =O.
d) lfV, gW] = fV[glW- gWifJV + fgW, W].
(Indicación: Z[fl = O para toda f implica que Z = 0.)
6
Campos de sistemas de referencia
Cuando se descubrieron las fórmulas ele Frenet (por Frenet en 1847 y, de
manera independiente, por Serret en 1851), la teoría ele las superficies en
E 3 ya era una rama ele la geometría que se había desarrollado abundantemente. Gracias al éxito de la actitud de Frcnet ante las curvas, Darboux
(hacia 1880) pudo adaptar este "método de sistemas móviles de referencia" al estudio de las superficies. Y, a continuación, como ya hemos
dicho, Cartan dio al método generalidad plena. Su idea esencial era muy
CAMPOS DE SISTEMAS DE REFERENCIA
99
sencilla: a cada punto del objeto que se estudia (curva, suprrficie, el
mismo espacio cuclidi:mo, ... ) se asigna un sisH·n¡a ele rE'ferencia; entonces, el empleo del desarrollo ortonormal expresa la rapidez de v:niación
del sistema de referencia en términos del mismo sistem;L Esto es lo mismo
que hacen las fórmulas de Frt'net en una cun·a, por supuesto.
En las trrs secciones siguientE's, vamos a dabor0r cktalladmncnte Fste
esquema en el espacio euclidi:mo E 3 . Veremos que la geometría ele ~urvas
y superficies de E' no es simplemente una analogía, sino. de hecho, un
corolario de estos resultados fundamentales. Puesto que la aplicación principal (a la teoría de las superficies) se estudia solamente rn el capítulo VI,
se pueden posponer estas secciones hasta el momento anterior al tr:1bajo
con este capítulo.
Por medio drl principio de operar punto por punto (capítulo 1 sección 2) podernos extender automáticamente las operaciones de n·ctorcs
tangentes individuales a las operaciones en campos \'ectoriales. Por ejemplo, si V y W son campos vectoriales en E\ entonces, el producto escalar
V•W ele V y TY es la función cliferenciablc, en E 3 y de valores reales cuyo
valor en pes V(p)•W(p). La norma !1 V !1 de V es la función en E 3
de valores reales cuyo \·alar en pes 11 V(p) 1:. Por tanto, 11 V 11 = (V•V)~.
En contraste con V· TV, la función norma 11 r· 11 no tiene que ser cliferenciable en los puntos en que F ( p) = O, puesto que la función raíz cnadrada
tiene mal comportamiento en O.
En cada punto p dc E'', los tres vectores tangentes U 1 (p), U~(p),
constituyen un sistema de referencia en p. Este comentario se expresa
concisamente en términos dr los productos punto de campos yectorialcs al
poner U¡•Uj = 8ij (1 < i.j ~ 3). En todo el capítulo I empleamos U 1 ,
C", U> Aquí, como ya tenemos el producto punto, haremos una gencr~lli­
zación sencilla, aunque decisiva.
re" (p)
6.1 DEFINICIÓN. Los campos vectoriales E 1 , E e, E 8 en E 3 constituyen
un camjJo de sistemas de referencia en E 3 siempre que
Ei·Ej
=
8 ij
(1 < i,j < 3)
donde 8 ii es la delta de Kronecker.
El término camjJo de sistemas de referencia se justifica por el hecho de
que, Pn cada punto p, los tres wctores E,(p), F"(p), E 3 (p) forman un
sistema ele referencia en p. Dimos una anticipación de esto al decir, en el
capítulo I, que U 1 , U 0 , U" eran el campo natural de sistemas de referencia en E 3 .
6.2 E.J El\IPI.O. 1) El camjJo cilíndrico de sistemas de referencia (figura 2.21). Sean r, 1J, z las funciones coordenadas cilíndricas habituales
lOO
CAMPOS DE SISTEMAS DE REFERENCIA
en E 3 • Vamos a escoger un campo vectorial unitario en la dirección en que
cada coordenada se incrementa (mientras las otras dos se mantienen
constantes). En r, esto es, eYidcntemcnte,
en la dirección que surgf' del eje de las z. Entonces,
apunta en la dirección de la {) en aumento, como se
\T
en la figura 2.21.
z
z
/
/
''
1
1
1
1
1
1
1
1
y
X
Cilíndrico
,
1
X
Figura 2.21
--- _.... --
y
Esférico
Figura 2.22
Por último, la dirección del incremento z cs. por supuesto, directamente
hacia arriba, de manera que se tiene
Se ,·erifica con facilidad que E;"Ej = 8 ¡ j· de manera que aquí tenemos
un campo de sistemas de rdcrcncia (que se define en la totalidad ele E 3
con la excepción del eje de las z). Lo lbnJ;unos camjJo cilíndrico de sistemas de referencia en E 3 .
2) El campo esférico de sistemas de referencia en E·' (figura 2.22).
De la misma manera, podemos deducir un campo ele sistemas ele referencia
F,, F 2 , F;, a partir de las funciones coordenadas esféricas p, {}, 'i en E".
Como lo indica la figura, mediremos '? hacia arriba a partir del plano .\)'.
en lugar de hacerlo (como se suele) hacia abajo a partir del eje de las z.
Sea E 1 , Ec, F," el campo cilíndrico de sistemas de referencia. En las
coordenadas esféricas, el campo vectorial unitario F 2 en la dirección de
la coordenada {} creciente es el mismo de antrs. de manera que F" = F".
El campo vectorial unitario F,. en la dirección de la p creciente, sale
directamente del origen; en consecuencia, lo podemos expresar como
F, = cos 9E1 +sen rpE3 ,
CAMPOS DE SISTEMAS DE REFERENCIA
101
(figura 2.23). De la misma manera, el campo wctorial para la rp en incremento es
Por consiguiente, las fórmulas de E 1 , E e, E, de ( 1) resultan en
F 1 = cos 9 (cos {}U, +sen{} U e) +sen 'P U"
Fe= -sen{} U 1 + cos {} Uz
F 3 = -sc:n
9
(cos iJ U, + sr·n {}U e) + cos 9 C,
El uso repetido de la identidad sen" + cos 2 = 1,
resulta en la comprobación de que F 1 , F 2 , F 3 es
un campo de sistemas de referencia: el campo
Figura 2.23
esférico de sistemas de referencia en E". (Su dominio real ele cldinición viene a srr E 3 menos Pl eje de las z, como teníamos en el caso cilíndrico.)
Los resultados siguientPs, ele utilidad. son consecuencia inmediata del
desarrollo ortonormal.
6.3 LEMA. Sea E,, Ec, E;; un campo de sistemas de referencia Fn E·'.
1) Si V es un campo vectorial en E', entonces TT = 2: f;E;, donde: las
funciones [i = V•E; se llaman funciones coordenadas de V con respecto
a E1_, E~, E ..-,.
2) Si T' =' 2: f,E; y TV = 2: g;F;, entonces V·W = 2: f;g;. En particular, [[ Vli = ("'.if;")Jf.
Por tanto, un campo vectorial dado V tiene un conjunto diferente de
funciones coordenadas con respecto a cada elección de campo de si:;tcmas
ele rdPrencia F¡, ¡~· 2 , E,,. Las funciones coordenadas cuc!idianas (lema 2.:> dd
capítulo I) provienen, por supuesto, del campo natural de sistemas ele referencia 1' 1 , U 2 • { ' 8 • En el capítulo I, b;te fup el único campo ele si,:temas
de rdcrencia que emplP;nnos, pero aquí iremos pa,;ando gradualmente :t
los campos :1rhitrarios ele sistemas ele rcferenciZI. Hay un~l razón clara de
esto: en d estudio de bs curvas y las superficies de E", podremos cscogu·
el campo de sistemas de referencia que óe adapte r/,, manera csjJecifica al
problema en cuestión. Con esto no ,,o lamente se simplifican los cálculo::, >in o
que se aclar<Jn más las idf'i\S ele b r;eometrb, rn f'omparación co;1 los
procedimientos que insisten en d nnpleo del mismo campo dé! sistemas
de referencia en cada situación.
EJERCICIOS
1. Si [ · \. fl' '(}11 campos vcctorialc:; en Eo linc:llmentc independientes en
cada punto, clemué;;t!Tse qne
102
CAMPOS DE SISTEMAS DE REFERENCIA
11
V]IV
El= A//
E.,
Vil'
~
=
]_~_!
1 '
~V
es un campo de sistemas de referencia, donde f~' = W - TV•E1E1.
2. Exprésese cada uno de los campos vectoriales siguientes i) en términos
del campo cilíndrico ele sistemas ele referencia ( mn los coeficientes en
términos ele r, {}, z) y ii) en términos del campo esférico de "sistemas
ele referencia (con los coeficientes en términos de p, {}, 'r) :
a) U 1·
b) cos {} U 1 + sen{} U" + U 3 •
e) xU1 + yUe + zU3.
3. Encuéntrese un campo de sistemas de referencia E,, Fe, E" tal que
E 1 = cos x U 1
+
sen x eos z U"
+
sen x sen z U 3 .
4. El campo toroidal de sistemas de referencia. Sea G la totalidad de E 3
con la excepción del eje de las z y el círculo C ele radio R en el plano
xy. Las funciones coordenadas toroidales p, {}, '? se definen en O como
lo sugiere la figura 2.24, de manera que
z
p
X
Figura 2.24
R + p cos 1') cos {}
y = (R + p cos cp) sen {}
z = p sen 1'·
X =
(
Si E.\, Ee, y F 3 son campos vectoriales unitarios en la dirección ele los
valores crecientes de p, {}y <p, exprésese E1, E2,E 3 en términos de U 1, Ue, U 3 ,
y demuéstrese que es un campo de sistemas de referencia.
7
Formas de conexión
Y amos a enunciar una vez más la cuestión esencial: la potencia de las
-fórmulas de Frcnet no proviene del hecho de que nos digan lo que son
103
FORMAS DE CONEXIÓN
las derivadas T', N', B' sino de qué expresan estas derivadas en términos
de T, N, B, de manera que en ello nos definen la curvatura y la torsión.
Aquí haremos lo mismo con un campo de sistemas de referencia, que será
arbitrario, E 1 , E 2 , E, en E 3 ; a saber, expresar las derivadas covarianíes de
estos ca m jJos 1•ectoriales en términos de los ca m jJOs vectorialrs mismos.
Empezaremos con el estudio de la derivada covariante con respecto a un
vector tangente arbitrario v en el punto p. Tenemos
"VrEl = CnEl(p)
'\J,Ee
=
cnE1(p)
'\lrE:;
=
c31El(p)
+
+
+
CloR2(p)
C22E2(p)
C:¡eEe(p)
+
+
+
c13E3(p)
Cz 3E3(p)
C3:;E:l(p)
donde, por el desarrollo ortonormal, los coeficientes ele estas ecuaciones son
1 < i,j < 3.
para
Estos coeficientes C;j dependen del vector tangente v que se tome en
particular, de manera que los denotaremos mejor como
(1<i,j<3).
Es así como para cada elección ele i y j, Wii es una función ele valores reales
definida en todos los vectores tangentes. Pero nosotros ya sabemos ele qué
función se trata.
7.1 LEMA. Sea E1, E 2 , E 3 un campo de sistemas ele referencia en E 3 •
Para cada vector tangente v a E 3 en el punto p, definamos
( 1 < i,j < 3).
Entonces cada w;j es una 1-forma, y "'ij
- Wji· Estas 1-formas se llaman
formas de conexión del campo de sistemas de referencia E 1 , E 2 , E 3 •
Demostración. Por definición, w¡ i es una función ck valores reales
definida en vectores tangentes, de manera que para demostrar que es una
1-forma (definición 5.1 del capítulo I), es suficiente verificar la condición
de linealidad. Pero al aplicar el teorema 5.3, concluimos que
wij(av
+
lxw)
=
'\J,,r,InvEi•Ej(p)
= '(a'\JJ;;i
+
b'\l,vE¡)·Ej(p)
=
a'\J vE;·Ej (p)
=
aoJ;Jv)
+
+
b '\lwE;·Ej (p)
b'"ii (w).
Para demostrar que "'U= -(úJi, tenemos que hacer ver que '''ii(v) =
para todo \Tctor Umgentc v. Por definición de campo de sistemas
- "'i; ( v)
104
CAMPOS DE SISTEMAS DE REFERENCIA
de referencia, E¡•Ei = 8ih y puesto que cada delta de Kronecker tiene el
valor constante O ó 1, tenemos que v[8;iJ = O. Por lo tanto, según la
fórmula de Leibniz 4 del teorema 5.3,
Gracias a la simetría del producto escalar, podemos invertir los dos ¡·ectores
del último término, de manera que hemos encontrado que O= wii(v) +
wj;
1
(v).
:\!"o hay misterios en la significación geométrica de las formas ele conexión.
La definición "'ii(v) = 'V E;·~'¡(p) nos muC'stra que w;¡(v) es la t;1sa
inicial de rotación de E; hacia F; cuando p se muez·e en la dirección v.
Por lo tanto, las 1-formas w;¡ ¡nos dan esta información acerca de todos
los vectores tangentes a E 3 !
En el siguiente resultado fundamental apenas se In hC'cho algo más
que redactar de nuevo la definición de las formas ele conexión.
7.2 TEOREMA. Sean "'iJ (1 < i, j < 3) las fom1as de cmlC'xión de un
campo de sistemas ele referencia F- 1 • E~, E, en E". Entonces, en cualquier campo vectorial V de E", se verifica quC'
(l<i<3).
Estas se llaman ecuaciones de conexión del campo de sistt'mas ele referencia E 1 , E", E,.
Denwstración. Para i fija, los dos mit'mbros de la ecuación son campos vretorialt's. Por lo tanto, hay que exhibir c¡ue, en cada punto p.
Pero, como ya hcmos visto. la mi,ma definición ele formas ck concxi(m
hace de esta ecuación una const·cm·ncia del dt'sarrollo ortonormal.
1
Cuando i
convierte en
=
j, la condición e! e simetría transpuesta
v1; i
= -
w i;
se
y, por esto,
Por comiguicnte,
es~a
condición tit·nr el efecto ele- reducir bs nueve 1-forni<lS
¡nra 1 ~ i. j ~ 3 a, en esencia, sol:nnentc tres, ;1 s;dwr ,.,,, vJ¡:;, "'"'3.
T:t! \TZ sea mc·jor considerar bs formas ele cone"'ión '''i ¡ cmno eh'mentos
ele una matriz asin;(>¡¡ ica ek 1-formas,
w;¡
•
CAMPOS DE SISTEMAS DE REFERENCIA
105
úlll
(¡)=
f
(!);21
L(¡J31
Por consiguiente, en forma desarrollada, las ecuaciones de conexión ( teorema 7.2) se convierten en
\lvE1=
'''l"(V)Rc
\lrEe= -wJ2(V¡El
\11·E"
=
+ '''r::(V)E:~
+ Ulc:J(V)E.,
-,,l1:1 (V)E 1
donde se ve la obvia relación c¡ue tiene con las fórmulas de Frcnet
T'=
r:N
+ TB
lv" = -r:T
B'
=
-
TN.
La ausencia en las fónllubs de Frenet de términos correspondientes a
"'t~(V)E, y -"''l:~(V)R, es consecuencia ele la manera especial en que d
campo de Frenet ele sisttemas ele referencia ~:e ajusta a la curva resplTl.Í\·a.
U na vez que hemos obtenido T (,...., E 1 ) , escogen tos N (,...., E 2 ) ele manera
que la derivada T' sea múltiplo escalar de solamente N, sm que inten·enga
B(,....,E,).
-
Otra difcrPncia entre las fórmulas de Frenet y las ecuaciones anteriores
proviene del hecho de que en E 3 hay tres dimcmiones, mientras que una
curva no tiene sino unn. Los coeficientes -cutTz:tura K y torsión T··- de
las fórmulas de Frcnet miden b rZJpidcz ele v::ri;lCión del c;:nnpo de sistema:; ele rderencia T, N, B sólo a lo brg-o de la cun·a correspondiente. es
decir, solamtente en la dirección de T. Pero los coeficientes de bs ccu:!cio:w!;
de ccm·xión han de ser c<1paccs clf cjccutztr la m;srna medición en F,. ]i 2 , ~·,
con rc':pecto ;¡ campo:; n~ctoriaks arbitrarios t'll E". Por esta raz(m bs
form<1s ele conexión son 1-formas, y no simplemente funcione:;.
Si hacernos a un lado rstas diferencias formaks. tencmm un;; distinción
de c<1r.icter m(ts fundan:cntal. Debioo <1 que d campo de Frerwt ele sistemas ele referencia se ajusta especialmente a su cun·a, bs fórmuhs ele
Frenet proporcionan información acerca ele esa nuYa. Puesto c¡ue el c1mpo
ele sistemas de referencia E 1 , Eé, E~ que empleamos antes es complct:nncnte
arbitrario, las ecuaciones ele conexión no clan infmmación directa acerca
ele E\ sino sólo información acerca ele la "t<1sa de rotación"' del cnnpo eh
sistcn1as de referencia en cuestión. Esto no constit m·c una dchiliclztcl, sino
un cknwnto ele fuerza, puesto que, como ya se elijo :m te, si podemos
ajustar un campo de sistemas ele rdcrenci<1 a un problema vcométrico
106
CAMPOS DE SISTEMAS DE REFERENCIA
que se plantee en E 3 , entonces, las ecuaciones de conexión darán información directa acerca de ese problema. Esta es b razón por la qur las
ecuaciones de conexión desemprlían un papel fundamental en toda la
geometría diferencial ele E 3 • En particular, las fórmulas de Frenet se
pueden deducir de ellas ( ejn·cicio 8). Pero al considerar la motivación del
estudio, hemos preferido estudiar en primer lugar el caso -más simpleele Frenet.
•
A partir de un campo arbitrario ele sistf'mas de referencia E 1 , Ec, F, en
E 3 , resulta bastante fácil encontrar una fórmula explícita de sus formas
de conexión. Se emplea en primer lugar el desarrollo ortonormal para
expresar los campos vectoriales F 1 , E 2 , E . en términos del campo natural
de sistemas de referencia U 1 , U~, U 3 en E 3 :
E1
=
a11U1
Ec
=
ac1u1
E3
=
a.11
U1
+ a12Uc + auU3
+ accU2 + a2JT,
+ a32Uz + a,3U,.
Aquí cada aij = Ei Uj es una función en E 3 de valores reales. La matriz
A
(aii)
cuyos elementos son estas funciones se llama matriz de disposición del
campo de sistemas ele referencia E,, F 2 , F 3 • De hecho, en cada punto p, la
matriz numérica
A(p) = (aij(p))
es exactamente la matriz ele disposición del sistema de referencia E 1 ( p),
E 2 ( p 1, E" ( p), como se tiene en la definición 1.6. Puesto que las matrices
ele disposición son ortogonales, la transpuesta 1A de A es igual a su inversa A- 1 •
Definamos la diferencial ele A = (aij) como dA = (daij), ele manera
que dA es una matriz cuyos elementos son 1-formas. Aquí ya podemos dar
una expresión sencilla ele las formas ele conexión en términos de la matriz
ele clisposi ción.
7.3 TEORI::'>IA. Si A = (aij) es la matriz ele disposición y "' = ("'ij)
es la matriz ele formas de conexión ele un campo de sistemas de referencia
E 1 , E", E 0 , entonces,
OJ
=dAtA
(producto de matrices),
107
CAMPOS DE SISTEMAS DE REFERENCIA
o sea,
Wij
= 2,:
1 < i, j < 3.
para
aik dailc
le
Demostración. Si v es un vector tangente en p, entonces, por definición
Puesto que A es la matriz de disposición, se yerifica que
y, así, por el lema 5.2,
El producto punto de este vector con
es, entonces,
w;i(v) = 2,:v[aii,]ai~<(p).
k
Pero, según la definición de diferencial, se tiene que
v[a¡¡J = dail;(v):
en consecuencia,
w;i
2.: aik(P)
(v) =
dai7,(v) = (2,: aikda;k) (v).
k
l;
Puesto que esta ecuación es válida en todos los vectores tangentes, las dos
1-formas Wii y 2,: ajl, da¡k son iguales. Es fácil obtener la fórmula matricial, que tiene aspecto más limpio. De hecho, la transpuesta t A tiene
elementos 1akj = ajk, de manera que
wii =
::S da¡¡, 1aki
1 < i, j < 3,
para
/;
que, en términos de productos matriciales, es simplemente w
-
=
dA· 1A.
1
Por medio de este resultado, calcularemos bs formas de conexión dE'l
campo cilíndrico de sistemas de referencia del ejemplo 6.2. De la definición, tomamos la matriz de disposición
cos {}
A=
{f
rL-sen
. o
sen{}
cos {}
o
108
CAMPOS DE SISTEMAS DE REFERENCIA
Por lo tanto,
[ -"n '' d&
- cos {} d{}
dA
cos {} d!}
-sen{}
d{}
o
o
o¡
o1·
oJ
Puesto que
["'"'
lA
-sen(}
01
cos {}
o1'
o IJ
sen{}
o
calculamos con facilidad
1
"'=dA A
r-d~
L
o
di}
01
o OJ.
o ()
Por lo tanto, uhe = d{} y todas las demús formas ele conexión (con la excepción ele w" 1 = - <tJ 1 c, por supuesto) \·al en cero. Entonces, las ecuaciones ele
conexión (teorema 7.2) del campo cilíndrico ele sistemas clr: referencia
se convierten en
'V vE1 = dff (V) Re = V[D]Ec
'VvEe = -d{}(V)El = - V[{}]E 1
'VvE3 = O
en todos los campos vectoriales F.
Estas ecuaciones tienen un significado geométrico que es obvio. La
tercera ecuación nos dice que el campo vectorial E" es paralelo. Esto ya
lo sabíamos, puesto que, en el campo cilíndrico de si;;tcmas de refcrcJKi;L
F" es simplemente C::. Las dos primeras ccuaciont s nos dicen que bs del i\·adas cov;1riantes de E, y E 2 con resprcto a un cnnpo \TClorial arbitr.trio
V dependen solamente de la tasa de cambio del úngulo (} en la dirccci(n
de fr. A partir de la m;mcra en qne 'e cldinc la función {). SC' comprende
co11 clarichd que T'[O) =O sicn:prc c;ue T' es, en cada punto, tangente
al plano que pasa por el eje de bs z. Es así como 01 un campo vectorial
de cstc tipo, las ccu:1cionr·s ele conexióu :mter1orcs predicen C]W' \!J·E, =
\l 1F" = O. A partir de la figura 2.21, se ve con claridad que E 1 y L" quedan
como paralelos en cualquier plano que pasa por el eje ele las z.
EJERCICIOS
1. En cualquier fuución
f,
demuéstrese que los campos vectoriales
109
CAMPOS DE SISTEMAS DE REFERENCIA
E2
=
('enf U1- Ue- cosf Uo)
E"
=
cos f Ul
/v2
+ sen fU"
forman un campo de sistemas de referencia, y encuéntrense sus formas de conexión.
2. Encuéntrense las formas de conexión del campo natural de .¡;istemas
de referencia U 1 , U 2 , U,,.
3. En cualquier función
f,
demuéstrese que
cos"
A
f
f
sen f cos f
l-sen f
cos f sen/
sen 2 f
cos f
es la matriz de disposición de un campo de sistemas de refert'ncia, y
calcúlense sus formas de conexión.
4. Demuéstrese que las formas de conexión del campo esférico dt' sistemas
de referencia son
w12 =
cos 1' d{},
5. Si r~· 1 , E 2 , E~ es un campo de sistemas de reft-rencia
demuéstrese h fórmula de la deriz•ada covariante:
y s1
W =
2: {iEi,
6. Sc.1 ~\. Ee, E, el Cl!npo cilíndrico de sistemas de referencia. Si V PS
un campo vectorial con la propiednd de que V[&] = 1, calcúlese
\i'¡(rcosD·E 1 + rsenffF:~).
7. Si F,, F 2 , F, es un campo de sistemas de referencia,
a) clmméstrese que F 1 [pj = 1 y que F,[{}] = F 1 [1'] =O.
b) c:alcúlese V'n(cospF 2 + senpF 3 ).
8. Sé'a f3 una curn. de rapidez unitaria en E 3 en la que K > O, y supongamos que E 1 , E 2 , E 3 es un campo de sistemas de referencia en E 3
tal que la restricción de estos campos vectoriales a f3 nos da el campo
de Frenet de sistemas de referencia T, N, B de [3. Demuéstrese que
ül¡e(T)
=K,
Dedúzcanse a continuación las fórmulas de FrPnPt a partir de las
ecuaciones de conexión. (!n dicación: f'Jt'rCICIO 6 ele 11.5.)
110
8
CAMPOS DE SISTEMAS DE REFERENCIA
Las ecuaciones estructurales
Hemos visto que las 1-fornus -las formas de conexión- clan la descripción más sencilla de la tasa ele rotación ele un campo ele sistemas de
referencia. Además, el rr,ismo campo de sistcm~\S ele referencia se puede
describir por medio de 1-formas.
8.1 DEFINrcró:-.~. Si E,, ¡,_,·e, E,, es un campo ele sistemas ele referencia
en E 3 , entonces, las 1-fornza.\ duales () 1 , ()~, ()" del campo de sistPrnas ele
referencia son las 1-formas con la propiedad siguiente:
O; (v) = v•E¡ (p)
para cada vector tangente v a E 3 en p.
Adviértase que (); es lineal en los vectores tangentes en cada punto; es,
en consecuencia, una 1-forma. (Los lectores que estén familiarizados con
la idea ele espacios vectoriales duales reconocerán que, en cacb punto,
(Jr, ee, 0.3 da las bases duales ele E 1 , E e, E 0 .)
En d caso del campo natural de sistemas de referencia U 1 , Uc, U 3 las
formas duales son simplemente dx 1 , dxc, dx,> De hecho, a partir del ejemplo 5.3 del capítulo I, obtenernos
dxi(v) = v; = v•U¡(p)
para cada vector tangente v; en consecuencia, rf.y ¡ = () ¡.
Por medio ele las formas duales, la fórmula del desarrollo ortonomral
del lema 6.3 se puede expresar como V= 2: (J¡(V)E;. De la manera que
es característica ele la dualidad, esta fórmula se convierte en el lema
siguiente.
8.2 LEMA. Sean O,, ()e, O, las 1-formas duales de un campo de sistemas de referencia E1, E 2 , E". Entonces cualquier 1-forma cp en E' tiene
la expresión única
Demostración. Dos 1-formas son iguales si tienen el rmsmo valor en
cualquier campo \·ectorial V Pero
(2: c¡) (E; ) () i )
(V)
=
2: c¡) (Ei ) O; ( V)
= <¡)(2; (J¡(V)E;) = <p(V).
Estas funciones cp (Ei) son las únicas funciones coordenadas posibles para
1) en términos ele 01 , ()"' () 0 , puesto que si 1) = 2; f¡(J;, entonces,
1
LAS ECUACIONES ESTRUCTURALES
111
Por lo tanto, 9 se expresa en términos de formas duales de Eh E 2 , E 3 al
evaluarla en E 1 , E 2 , Es· Este hecho, que tiene utilidad, es la generalización
a campos arbitrarios de sistemas de referencia del lema 5.4 del capítulo I.
Hicimos la comparación de un campo de sistemas de referencia E1,
E", E 3 con el campo natural de sistemas de referencia por medio de su
matriz de disposición A = (a i j) , en donde
(1 ::::;<3).
La formulación dual consiste simplemente en
con los mismos coeficientes. De hecho, por el lema 8.:2 (o, más bien, por
su caso especial, que se enuncia en el lt>ma 5.4 del capítulo I), tenemos
Pero
Estas fórmulas de Ei y (Ji nos muestran claramente que () 1 , () 2 , () 3 es simplemente la descripción dual del campo de sistemas de referencia E 1 , E 2 , E".
En el cálculo, cuando entra en escena alguna función nueva, se inquiere
con naturalidad qué derivada tiene. Lo mismo nos sucede con las 1-formas -pues hemos asociado con cada campo de sistemas de referencia
sus formas duales y sus formas de conexión- y nos preguntamos qué
derivadas exteriores tienen. La respuesta está contenida en dos pulcros
con juntos de ecuaciones que se deben a Cartan.
8.3 TEOREMA (las ecuaciones estructurales de Cartan). Sea E 1, E 2, E 3
un campo de sistemas de referencia en Es con formas duales (} 1 , (} 2 , (} 3 y
formas de conexión Wij ( 1 < i, j < 3) . Las derivadas exteriores de estas formas satisfacen
1) las primeras ecuaciones estructurales:
(1<i<3);
2) las segundas ecuaciones estructurales:
(1 < i, j < 3).
Debido a que (Ji es dual de Ei, las primeras ecuaciones estructurales
se reconocen con facilidad como duales ele las ecuaciones de conexión.
Sólo sobre la base ele la experiencia posterior descubriremos que la se-
112
CAMPOi:> DE SISTEMAS DE REFERENCIA
gunda ecuac10n estructural nos hace ver que E 3 es plano, en un sentido
burdo, de .la manera en que decimos que E 3 es plano.
Demostración. Hemos visto que
Bi
.2: a;idx¡,
=
Pn consecuencia,
= 2: daii
dBi
1\
dx¡.
PuPsto que la matriz de disposición A = (a;¡) es ortogonal, b expresión
del teorema 7.3 de "'ii en términos de da;¡ se puede resoh-cr para da¡¡
mediante el formalismo habitual del álgebra lineal, de manera que se
obtenga.
da;¡ =
2: oJ¡~;a¡,¡.
"
Por lo tanto,
dB; =
2:{C~;w;~;a~;¡) 1\
dx¡}
k
=
.2:
{w;~c 1\ .~ aki dx¡}
k
=
j
2:k "'il' 1\
B~c
que es la pnmera ecuación estructural.
Podríamos hacer una demostración parecida a ésta, de manejo de
índices, de la segunda ecuación estructural, pero el empleo liberal ele la
notación matricial nos ciará una idea más clara ck lo que sucede en
realidad. Para aplicar la derivada exterior d a una matriz de funciones
o de 1-formas, se la aplicamos a cada elemento. La fórmula matricial
w = dA 1A del teorema 7.3 significa, por ejemplo,
Pero
dwi¡ =
-2: dailc
1\
dajlc·
( ¡ Obsérvese el signo menos!) En consecuencia, en notación matricial, en
la que suprimiremos la tilde, tenemos
dw = -dA 1 (dA).
Si multiplicamos los dos miembros ele "'
= dA t A por A, obtenemos
dA= wA,
puesto que t A = A-1 • A continuación, tc>ncmos que la regla de la transpuesta de una matriz nos resulta en
113
LAS ECUACIONES ESTRUCTURALES
Al tomar esto en cuenta en la ecuación anterior de d(J), obtenemos
puesto que ()) es asimétrica. Pero esta expresión es prccis;:¡mentc la segunda
ecuación estructural dwii = ¿ wi 7, A (J)kiJ en notación matricial.
1
8.4 EJEMPLO. Las ecuaciones estructurales del campo esférico de sistemas de referencia (ejemplo 6.2). Las form;.¡s duales y las formas de
conexión son
Ú)l2 =
cos rp d¡'J.
ol = dp
82
= p cos rp d&
o"
=
P drp
úll3
=
drp
<r>z 3
=
sen rp d{}.
Verifiquemos, por ejemplo, la primera ecuación estructural
dOa = ¿(J)3 i A Oi =
w31
A 01
+
w3z
A 02 •
Si empleamos la asimetría (J)ii = -"'ii y las propiedades generales de formas que desarrollamos en el capítulo I, obtenemos
= -d'P
= dp
wa1. A
01
w32 A
Bz = (-sen<pd&) A (pcosrpdtf) =O
(lo último gracias a que d{}
correctamente
dO,,
A dp
A
d{}
=
d(p drp)
=
A d<p
O). La suma de estos términos es
= dp
1\ d<p.
En la segunda ecuación estructural interviene un solo producto tilde.
Por ejemplo, puesto que w11 = '""" = O,
En este caso,
(JJ1a
A w32
= drp
A (-sen rp d{})
-sen
'f
drp
A
d{}
lo cual es lo mismo que
d,w 12 = d(cos<pdtf) = d(cosrp) 1\ d{} = -scnrpdrp A d&.
Para deducir las expresiones que hemos dado de las 1-formas duales, se
calculan en primer lugar dx 1 , dx 2 , dx 3 por diferenciación de las conocidas
ecuaCiones
x1 = p cos 9 cos ¡').
Xz
= p cos rp sen &
X:1 =
p S0n 'f·
114
CAMPOS DE SISTEMAS DE REFERENCIA
A continuación se ponen en la fórmula Oi = ~ aii dxi, donde A =
( aii) es la matriz de disposición que se Encuentra en el ejemplo 6.2.
Descubriremos más adelante una técnica de cálculo que es más eficic!1te, r:·lacionada con el enunciado c;iguicnte que. aunque carece ele
sentido lógico, rs confiable, el cu;Ü hemos tomado el cálculo elemental:
si, en cada punto, las coordenadas esféricas p, {}, cp o,e yen ztltcr;~Lb por
dp, d{}, drp, entonces, los lados ele la caja infinitesimal c¡u'" resulta s;•r;'Í.n dp,
p cos cp d{}, p drp (figura 2.25). Pero éstas son precisamente las fórmulas de
las fom1as duales 01, Oc, 03.
Figura 2.25
Como ya dijimos, la aplicación principal que haremos de las ecuaciones
estructurales de Cartan será en el estudio de la geometría de las superficies
(capítulos VI y VII). La obra de Flanders [1 J contiene mayor variedad de
aplicaciones.
EJERCICIOS
=
1. En una 1-fonna cp
dcp
~
=
[iOi, demuéstrese que
~
{dfi
+ 2;i{ioJii}
A 0¡.
j
(Compárese con el ejercicio 5 de II.7.)
2. En el campo toroidal ele sistemas de referencia del ejfTClCIO 4 de II.6,
demuéstrese que
dp
O"= (R
()1 =
()3 =
p
W12
+
drp
pcosrp)dD
W¡3
, wz2
=
COS
=
dcp
= sen
'f' d{}
cp d{}.
115
RESUMEN
(Indicación: encuéntrese e, mediante el procedimiento que se describe
al final de II.8. No hace falta calcular para encontrar "'ii·l
3. Verifíqueme las primer~s ecu~ciones estructurales en el caso del campo
toroidal ele sistemas ele referencia.
4. En el campo cilíndrico de sistemas de referencia F 1 , E., L,: •
a) Demuéstrese que e, = dr, ()" = dfJ, 0:; = dz z¡J c\·aluarlo en l.l,, Uc,
U3.
/>) DedC!ZCase que E 1 [r] = 1, E.[OJ = 1/r, FJ::J = l, y que las otras sei5
posibilidades E,[ DJ, · · · son teclas cero.
e) En una función f ( r, B, z) expresada en términos ele coordenadas
cilíndricas, hágase ver que
E,[fj
=
a¡
a¡
or-
r (;{)
'
EdfJ
.
=
2/ ·
~-
(,:
5. Los campos de sistemas de referencia en E". En un campo de sistemas
de referencia E 1 , E~ en el plano E 2 :
a) Encuéntrense las ecuaciones de conexión.
b) Si
E, = cos cp U 1 + sen 'r' [J 2
E2 = - sen cp l.),
+ sen cp C
2
donde cp es una función arbitraria, exprésense las 1-formas duales
(},, 02 y la forma de conexión ,, 2 en términos de rp.
e) Demuéstrense las ecuaciones estructurales en este caso.
9
Resumen
Hemos alcanzado los propósitos que nos planteamos al empezar el capítulo. Hemos expresado rigurosamente la idea de sistema móvil de referencia
como camj!o de sistemas de referencia, que definimos o bien en una curva de ES, o bien en un conjunto abierto del mismo E 3 . En el caso de una
curva, empleamos solamente el campo de Frenet de sistemas de referencia
T, N, B de la curva. Al expresar las derivadas de estos campos vectoriales
en términos de los mismos campos vectoriales, descubrimos la c~rvatura
y la torsión de la curva. Hemos entendido claramente que la curvatura y la
torsión dicen mucho acerca de la geometría de una curva; en el capítulo III
veremos que lo dicen todo. En el caso de un conjunto abierto de E 3 ,
tra}njamm con un campo arbitrar: o de sistcmas ele referencia F 1 , Ec, E':~·
La generalización ele Cart::m (teorema 7.2) ele las fórmulas de Frcnet
sigue el mismo camino ele expresar bs dcri·•adas ( co\·ariantcs) de estos
campos ycctoriales en términos ele los c:i!npos \"CCto:·i;~lcs mismos. Si omltimos el campo vectorial l 7 de b notación ~lcl teorema 7.2, tenemos
116
CAMPOS DE SISTEMAS DE REFERENCIA
Cartan
'VE,
'V E e
-,,,,cf;,
(J)tzEz
'VE:
-(!)1:¡}~¡
'''""F,
Frenet
+
+ ú)',!_?,E:,
(J)13E3
T' =
N' = -KT
B' =
KN
+ TB
-,1\'
Las ecuaciones de Cartan no tienen un aspecto conspicuamento. más
complicado que las de Frem:t gracias a que se dispone del concepto de
1-form::J para los coeficientes "'ii, las formas de conexión.
CAPITULO
111
Geometría euclidiana
Vamos a refrescar la memoria acerca de algunas características conocidas
de la geometría plana. En primer lugar, dos triángulos son congruentes si
existe un moYimiento rígido del plano que lleva a uno de ellos exactamente al lugar que ocupa d otro. Los ángulos correspondientes de triángulos congruentes son iguales, los lados correspondientes tienen la misma
longitud, las áreas que encierran son iguales, y así sucesivamente. Desde
luego, cualquiET propiedad geométrica de un triángulo es compartida automáticamente por todos los triángulos congruentes con él. Y, recíprocamente, hay varias maneras sencillas de decidir si dos triángulos dados son
congruentes; por ejemplo, si en cada uno de ellos se tienen los mismos tres
números como las longitudes de sus lados.
En este capítulo, investigaremos los movimientos rígidos (isometrías)
del espacio euclidiano y veremos la manera en que estos conceptos relativos
a triángulos se pueden extender a otros objetos geométricos.
lsometrías de E 3
Una isometría, o movimiento rígido, del espaciO euclidiano es un mapeo
de clase especial que conserva la distancia euclidiana entre los puntos
(definición 1.2. capítulo II).
1.1 DEFINICIÓN. U na isometría de E 3 es un m apeo F: E 3
d(F(p),F(q))
=
~
E 3 tal que
d(p,q)
para todos los puntos p, q en E 3 •
1.2
EJEMPLO
l. Traslaciones. Fijemos un punto en E 3 y sea T el mapeo que aíia< 1"
a a tocio punto de E 3 . Por consiguiente, T(p) = p +a para todos ]e;
puntos p. T se llama traslación en a. Se ve con facilidad que T es iscmetría, puesto que
117
118
GFOMETRÍA EuCLIDIANA
d(T(p), T(q)) = d(p +a, q + a)
y
fi(P +a) IIP- qll =
Figura 3.1
(q
+ a)ll
d(p,q).
2. Rotación alrededor de uno de los e;es de
coordenadas. La rotación del plano xy que.rccorre
un ángulo {} lleva al punto (p1, P2) al punto
(q,, q 2 ) , de coordenadas (figura 3.1)
q1
=
Pt cos {} - Pe sen{}
q" = p,
sen{}
+
f1 2 cos ff.
Es así como la rotación de E 3 alrededor del eje de las z (que recorre un
ángulo {}) tiene la fórmula
para todos los puntos p. Es evidente que e es una transformación lineal;
en consecuencia, es en particular un mapeo. Con cálculos directos, se comprueba que e conserva la distancia euclidiana, de manera que e es isometría.
Recordemos que si F y e son mapeos de Ea, la función compuesta
es un mapeo de E3 que se obtiene al aplicar antes F y después G.
eF
1.3 LEMA. Si F y G son isometrías de E 3 , entonces el mapeo compuesto
\:F es también isometría de E 3 .
e(
Demostración. Puesto que G es isometría, la distancia de
F ( p) ) a
G(F(q)) es d(F(p), F(q)). Pero, puesto que Fes isometría, esta distancia es lo mismo que d (p, q). Por lo tanto, GF conserva la distancia y es
isometría.
1
Con breyedad, enunCiaremos este resultado como: la composición de
isometrías es isometría.
También recordaremos que si F: E 3 ~Ea es simultáneamente uno a
uno y sobre, entonces F tiene una función inversa única F- 1 : Ea ~ES, que
asocia con cada punto F(p) el punto original, p. La relación entre F y F-1
queda descrita de mejor manera por las fórmulas
pp-1 = !,
F- 1 F =J.
donde 1 es el mapeo identidad de E 3 , es decir, el mapeo con la propiedad
de que /(p) = p para todo p.
Las traslaciones de E 3 (según se definieron en el ejemplo 1.2) resultan
sn la clase más sencilla de isometrías.
ISOMETRÍAS DE
E3
119
1.4 LEMA. 1) Si S y T son traslaciones, entonces ST = TS es también
traslación.
2) Si T es traslación en a, entonces T tiene una inversa T-t, que es
traslación en -a.
3) Dados dos puntos cualesquiera p y q de E 3 , existe una traslación
única T tal que T(p) = q.
Demostración. Demostraremos (3), por ejemplo. Observemos que la
traslación bajo q- p lleva, desde luego, a p al lugar de q. Esta es
la única posibilidad, puesto que si Tes traslación en a y T(p) = q, entonces
p + a= q; en consecuencia, a = q - p.
1
Tenemos un caso especial de (3), que es útil, en que si T es una traslación con la propiedad de que en uno de los puntos se verifica que
T(p) = p, entonces T = l.
La rotación del ejemplo 1.2 es un caso de transformación ortogonal
de E 3 ; es decir, una transformación lineal e: E 3 --'? E 3 que conserva el
producto escalar en el sentido de que
e(p)·e(q) = p·q
e
1.5 LEMA. Si e: E 3
es isometría de E 3 •
--'?
para todo p, q.
E 3 es una transformación ortogonal, entonces
e
Demostración. Haremos ver en primer lugar que
mas. Por definición, 11 p 1!" = p•p; por consiguiente,
11
e(p) W= e(p)·e(p) = P'P =
11
P
conserva las nor-
w.
De lo cual se desprende que 1[ e (p) 11 = 11 p 11 para todos los puntos p.
Puesto que e es lineal, concluimos con facilidad que e es isometría:
d(e(p), e(q)) =
11
e(p) - e(q)
= d(p,q)
11
=
11
e(p- q)
11 =
11
P- q
11
1
para todos los p, q.
Nuestro objetivo aquí está constituido por el teorema 1.7, que afirma
que es posible expresar toda isomctría como transformación ortogonal seguida de una traslación. La parte principal de la demostración consiste
en el enunciado siguiente, que es el recíproco del lema 1.5.
1.6 LEMA. Si F es isomctría de E 3 con la propiedad de que F(O)
entonces F es transformación ortogonal.
=
O,
Demostración. Veremos en primer lugar que F conserva los productos
escalares; a continuación, que. F es transformación lineal. Observemos que,
120
GEOMETRÍA EUCLIDIANA
por definición de distancia euclidiana, la norma 11 p 11 de un punto p es
precisamente la distancia euclidiana d(O, p) del origen a p. Por hipótesis,
F conserva la distancia euclidiana, y F(O) = O; en consecuencia,
11 F(p) 11 = d(O, F(p)) = d(F(O), F(p)) = d(O, p) = 11 p 11.
De donde concluimos que F conserva las normas. A contin,uación, por
medio de un recurso estándar ("polarización"), deduciremos que también
conserva los productos escalares. Puesto que F es isometría, tenemos que
d(F(p),F(q))
=
d(p,q)
para cualquier par de puntos. En consecuencia,
11 F(p) - F(q)
11
= 11 P- q JI,
lo cual, por la definición de norma, implica que
(F(p) - F(q) )·(F(p) - F(q)) = (p- q)•(p- q).
Y, en consecuencia,
F(pJ lf"- 2F(p) •F(q)
+
11 F(q) 11" = 11 p li"- 2p•q
+
li q 11
2
•
Aquí se cancelan los términos que consisten en normas, puesto que F conserva las normas, y llegamos a la expresión
F(p)•F(q)
=
p•q,
que era lo que buscábamos.
Nos falta demostrar la linealidad de F. Sean u 1 , u 2 , u 3 los puntos unitarios (1, O, 0), (0, 1, 0), (0, O, 1) correspondientes. Entonces, se verifica
la identidad
Además, los puntos u 1 ,
8ij.
llz, U:;
son ortonormales; esto significa que
Ui'U¡ =
Sabemos que F conserva los productos escalares, de manera que F(u 1 ),
F(u 2 ), F(u3 ) tienen que ser también ortonormales. Entonces, el desarrollo
ortonormal que resulta es
F(p) = ¿p(p)•F(ud F(u;).
Pero
F(p)•F(u¡)
de manera que
=
p•ui
=
p;,
ISOMETRÍAS DE E 3
121
Por medio de esta identidad, la condición de linealidad se comprueba
fácilmente:
F (ap
+
bq)
= aF(p) + bF(q).
1
Daremos a continuación una descripción concreta del aspecto de una
isometría arbitraria.
1.7
Si F es isometría de E 3 , existen entonces una· traslación
única T y una transformación ortogonal única C tales que
TEOREMA.
F= TC.
Demostración. Sea T la traslación en F(O). Vimos en el lema 1.4 que
T-- 1 es la traslación por -F(O). Pero T- 1F es isometría, según el lema 1.3,
y, además,
(T- 1F) (O) = T- 1 (F(O)) = F(O) - F(O) =O.
Por lo tanto, según el lema 1.6, T- 1 F es una transformación ortogonal, y
podemos poner T-'F = C. :\1 aplicar por la izquierda T, obtenemos
F= TC.
Para Jemostrar la unicidad que se enuncia, supondremos que también
-podemos expresar F como TC, donde T es traslación y C es transformación
--~
~
ortogonal.__ Debemos Jemostrar que T~=- T y que C = C. _Ahora bien,
TC = TC; en consecuencia, C = T- 1 TC. Puesto que C y C: son transformaciones lineales, transforman el origen en sí mismo. De ello se desprende que (T- 1 T) (O) = O. Pero, debido a que T- 1 T es una traslación,
concluimos que T- 1 T = 1; en consecuencia, T = T. Entonces, la ecuación
TC = TC se comierte en TC = TC. Al aplicar T-I, nos queda C = C.
1
Por consiguiente, podemos describir toda isometría de E 3 de manera única como transformación ortogonal seguida de traslación. Cuando F = TC,
como en el teorema 1.7, decimos que C es la parte ortogonal de F, y que
T es la parte de traslación de F. Ackiértase que, en general, CT no es lo
mismo que TC (ejercicio 1) .
El teorema de descomposición que acabamos de demostrar es el hecho
decisivo acerca de las isometrías de E 3 (y su demostración se puede extender a En). Por ejemplo, encontraremos aquí fórmulas explícitas de
una isometría arbitraria F = TC. Si (cii) es la matriz de la transformación lineal e, tenemos la fórmula explícita
C(pl, P2, Ps) = ("'2,
C1jpj,
2. C2jjJj, 2:, C3jjJj)
para todos los puntos p = (p1, Pz, p3) . Aquí empleamos el convemo de
vectores columna, con el cual q = C (p) significa que
122
GEOMETRÍA EUCLIDIANA
e
Puesto que
es una transformación lineal ortogonal, se ve fácilmente
que la matriz ( cii) es ortogonal en el sentido de que su inversa. es igual
a su transpuesta.
Volvamos a la descomposición F
lación en a = ( a 1 , a 2 , a 3 ) • Entonces,
F(p)
=
=
Te para suponer que T es tras-
TC(p) =a+ e(p).
Por medio de la fórmula anterior de e(p), obtenemos
De otra manera, mediante los convenios de vector columna, el significado
de q = F(q) es
EJERCICIOS
e
En todos los ejerciCIOS siguientes, A, B y
denotan transfornuciones
ortogonales (o sus matrices) y Ta es una traslación en a.
1. Demuéstrese que eTa
= Tc(a)e.
2. Dadas las isometrías F = TaA y G = TbB, encuéntrense las partes de
traslación y ortogonal de FG y de GF.
3. Demuéstrese que una isometría F = Tae tiene un mapeo inverso F-\
que también es isometría. Encuéntrense las partes de traslación y ortogonal de F-1 .
4. Si
e=
(-i
li
3
y
p = (3, 1, -6),
{ q=(1,0,3)
123
ISOMETRÍAS DE E 3
5. Sea F
=
TaC, donde a= (1,3, -1) y
C=
Si p
[
~/V2
o -1;
11v2 o
-v2]
o
.
1;-..;2
= (2, -2, 8), encuéntrense las coordenadas del punto q, en el que
b) q = p-1 ( p) .
a) q=F(p).
e) q
=
( CT a)
(p) .
6. En cada uno de los casos siguientes, decídase si F es isometría de E 3 .
De ser así, encuéntrense sus partes de traslación y ortogonal.
a) F(p) =
b) F(Il) =
e) F(p) =
d) F(p) =
-p.
p•aa, donde
(p 3
11
a
11
1,jJz- 2,p 1
(p,,pe, 1).
-
=l.
-
3).
e
Un grupo
es un conjunto provisto de una operación que asigna a
cada par g,, gc de elementos de e un elemento ~1~2, sometido a las
reglas siguientes: 1) ley asociativa: (g,g 2 )g3 = g 1 (g,g 3 ) ; 2) existe un
elemento identidad único e, tal que eg = ge = g para todo g en e, y
3) inversos: para cada g en e existe un elemento g- 1 en e con la
propiedad de que g,r.;-1 = g-' g = e. Los grupos ocurren con naturalidad en muchas partes ele la geometría, y mencionaremos unos cuantos
en los ejercicios siguientes. Las propiedades fundamentales de los grupos se pueden estudiar en la obra de Birkhoff y MacLane [2], por
ejemplo.
7. Dl'muéstrese que el conjunto
o ele todas las isornetrías de E
constituye
un grupo, si tomamos la composición de funciones como operación.
0 se llama grupo euclidiano (de orden 3), o grupo de movimientos
euclidianos de E 3 .
Un subconjunto H de un grupo
es sub grupo de
cuando 1) si g, y
g 2 están en Il, también lo está g 1 g,; 2) si g está en H, también está g-',
y 3) el elemento identidad e de
también está en H. Un subgrupo
H de
es automáticamente un grupo.
e
e
3
e
e
8. Demuéstrese que el conjunto 9 de todas las traslaciones ele E 3 y el
conjunto 0(3) ele todas. las transformaciones ortogonales de E 3 son,
124
GEOMETRÍA EUCLIDIANA
cada uno, subgrupos del grupo euclidiano 0. O ( 3) se llama grupo
ortogonal de orden 3. ¿Qué isometrías de E 3 pertenecen a ambos
subgrupos?
2
El mapa de derivadas de una isometría
Vimos en el capítulo I que un mapeo arbitrario F: E"~ E' tien~ un mapa
de derivadas F* que transforma a cada vector tangente v en p en un vector tangente F*(v) en F,,(p). Si F es isometría, su mapa de derivadas es
notablemente sencillo. (Puesto que la distinción entre vector tangente y
punto es aquí decisiva, vamos a restablecer temporalmente el punto de
aplicación en nuestra notación.)
2.1
TEOREMA.
Sea F una isometría de E" con parte ortogonal C.
Entonces,
para todos los vectores tangentes
Vp
a E3•
Esto significa verbalmente lo siguiente: para obtener F,,(v¡¡), hay que
trasladar en primer lugar el vector tangente Vp al punto canónicamente correspondiente v de E 3 , para aplicar en seguida la parte ortogonal C de
F, y trasladar, por último, este punto e (V) ;¡l vector tangente en F ( p)
que le corresponde canónicamente (figura 3.2). Por lo tanto, todos los
vectores tangentes en todos los puntos p de E 3 "rotan" exactamente de la
mzsma manera bajo F*; sólo el nuevo punto de aplicación F(p) depende de p.
Demostración. Ponemos F = TC, como hicimos al demostrar el teorema l. 7. Sea T traslación en a, ele manera que F ( p) = a + C ( p) . Si
vP es un vector tangente a E 3 , entonces, por la definición 7.4 del capítulo I, F*(vv) es la velocidad inicial ele la curva t~F(p + tv). Pero, al
picar la linealidad de e, obtenemos
F(p
+
tv) = TC(p
= F(p)
+ tv) =
+ tC(v).
T(C(p)
/'/
/
·---
+ tC(v))
____ ..oC(v)
o
Figura 3.2
=a+ C(p)
+
tC(v)
EL MAPA DE DERIVADAS DE UNA ISOMETRÍA
Y, así, tenemos que F*(vv) es la velocidad inicial de la curva t~F(p)
te (v), que es precisamente el vector tangente ( ev) F(pl.
125
+
1
Al expresarnos en términos de coordenadas euclidianas, el resultado
queda como
F*(~
VjUj)
)
= ~
CijVjÜi
l,j
donde C = (e i i) es la parte ortogonal de la isometría F, y, si U; se
evalúa en p, entonces üi se evalúa en F(p).
2.2 CoROLARIO. Las isometrías conservan los productos escalares de vectores tangentes. Es decir, si vP y Wp son vectores tangentes a E 3 en el
mismo punto, y si F es isometría, entonces
Demostración. Sea e la parte ortogonal de F y recordemos que e, al
ser transformación ortogonal, conserva los productos escalares en E 3 . Según
el teorema 2.1,
=
Y''V =
Vp'Wp
donde ha intervenido dos veces la definición 1.3 del capítulo II (productos escalares de vectores tangentes) .
1
Con la demostración ele este corolario fundamental y del teorema que
enunciaremos en seguida, el resultado inicial (teorema 2.1) ha cumplido
en buena parte su misión. Por tanto, una vez más, podemos omitir, sin
temor alguno, el punto de aplicación de nuestra notación, para escribir
sencillamente F,,(v)•F*(w) = y•w. Si empleamos un lenguaje más elegante, el corolario afirma que, para cada punto p, el mapa de derivadas
F*P en p es una transformación ortogonal de espacios tangentes (que difieren de
sólo en los isomorfismos canónicos de E 3 ) .
Puesto que los productos escalares se conservan, concluimos automáticamente que los conceptos derivados de ellos, como son las normas y los de
la ortogonalidad, también se conservan. De manera explícita, si F es isometría, entonces 11 F,, ( v) 11 = 11 v 1!, y si Y y w son ortogonales, también
lo son F,,, (Y) y F* (w). En consecuencia, también se conservan los sistemas
de referencia: si e 1 , e", e 3 es un sistema de referencia en algún punto p de
E 3 y si F es isometría, en ton ces F: ( e 1 ) , F, ( e 2 ) , F, ( e 3 ) es sistema de referencia en F(p). (La demostración directa es fácil: ei'ei = 8ii' luego, por
el corolario 2.2, F,(e;)•F*(ei} = e;'ei = 8;jo}
e
126
GEOMETRÍA EUCLIDIANA
El enunciDdo (3) del lema 1.4 nos hace Yer b manera en que dos puntos
determinan de manera única una traslación. Veremos a continuación que
dos sistemas de referencia determinan ele mantera única una isometría.
2.3 TEOREMA. Dados dos sistemas de rcftercncia cualtesquitera en E 3 ,
por tejemplo, e 1 , ee, e 3 en el punto p y f 1 , fe, f~ en el punto q, t'xiste una
isometría única F ele E'1 tal que F ( ci) = [¡ para 1 s i < 3.
Demostración. Vamos a exhibir en primer lugar la existencia ele la
isometría propuesta. Sean e 1 , e2 , e;; y / 1 , fe, /: 1 los puntos de E 3 en correspondencia canónica con los vectores de los dos sistemas de referencia. Sea
e la transformación lineal única de E" con la propiedad de que C ( ei) =
f; para 1 < i < 3. Se yerifica con facilidad que e es ortogonal. Sea a
continuación T una traslación que recorre el punto q - C (p). Afirmaremos que la isometría F = TC transforma d sistema de referencia e en
el sistema de referencia f. Observemos en primer lugar que
F(p) = T(Cp) = q- C(p)
+
C(p) = q .
.\1 aplicar a continuación el teorema 2.1, obtenemos
para 1 < i S 3.
Para demostrar la unicidad, obserYamos que, de acuerdo con el teorema 2.1' esta elección de e es la única posibilidad para la parte ortogonal
de la isometría que se pide. Pero la parte de traslación también está determinada por completo, puesto que obligadamente ha de transformar e (p) en
q. Y es así como la isometría F = TC está determinada de modo único.
1
El cálculo explícito de la isometría que se menciona en el teorema no
es difícil. Sean e¡ = (ail, a¡z, aia) y f = (b; 1 , biz, b; 3 ) para 1 < i :':: 3. Entonces las matrices (ortogonales) A = (a; i) y B = (b i i) son las matrices
de disposición de los sistemas de referencia e 1 , e 2 , e 3 y ( 1 , f 2 , f 3 que les
corresponden. Afirmamos que la C del teorema (o, en un sentido estricto,
su matriz) es t B ·A. Será suficiente verificar que t BA (e;) = f;, puesto que
así se caracteriza de manera única a C. Pero, al aplicar los convenios de
vectores columna, obtenemos
127
ORIENTACIÓN
es decir, tBA(e 1 ) = f 1 (los casos i = 2,3 son parecidos). Por lo tanto,
e= 1BA. Como señalábamos antes, T es necesariamente la traslación en
q-e(p).
EJERCICIOS
1. Si T es traslación, entonces, para cada vector tangente v demuéstrese
que T,.(v) es paralelo a v (que tiene las mismas coordenadas euclidianas).
2. Demuéstrense las fórmubs generales (GF)* = GF, y (F-1 )*
en el caso especial en que F y G son isometrías de E".
=
(F,)- 1
3. a) Sea e,, ee, e 3 un sistema de referencia en p cuya matriz de disposición es A. Si F es la isometría que transforma el sistema natural
de referencia en O en este sistema de referencia, verifíquese que
F = TpA- 1 (A- 1 = 1A).
b) Sea a continuación f 1 , f 2 , f 3 un sistema de referencia en q con matriz
de disposición B. Aplíquese el ejercicio 2 para demostrar el resultado, enunciado en el texto, de que la parte ortogonal de la isometría que transforma el sistema de referencia e en el sistema f es
B- 1 A.
4. a) Demuéstrese que una isometría F = Te transforma el plano que
pasa por p y es ortogonal a q en el plano que pasa por F (p) y
es ortogonal a e (q) .
b) Si P es el plano que pasa por ( ~' -1, O) y es ortogonal a (0, 1, O),
encuéntrese una isometría F = Te tal que F(P) sea el plano que
pasa por (1, -2, 1) y sea ortogonal a (1,0,- 1).
5. Dado el sistema de referencia c 1 = (2, 2, 1) /3, e 2 = ( - 2, 1, 2) /3,
e,, = ( 1, -2, 2) /3 en p = (0, 1, O), y dado el sistema de referencia
rl
=
(1,0,1)/v2,
f2 = (0, 1,0),
f3
=
(1,0, -1)(/2
en q = (3, -1, 1), encuéntrese la isometría F = TC que transforma
el sistema de referencia e en el sistema de referencia f.
3
Orientación
Pasaremos a continuación a examinar una de las ideas más interesantes
de la geometría. Desde el punto de vista intuitivo, en el espacio ordinario,
podemos distinguir un guante derecho del guante izquierdo gr2.cias a la
orientación. Para emplear matemáticamente este concepto, substituiremos
128
GEOMETRÍA EUCLIDIANA
los guantes por sistemas de referencia, y separaremos todos los sistemas de
referencia de E 3 en dos clases con el criterio siguiente. Recordemos que,
asociada con cada sistema ele referencia ~ 1 , e 2 , e 3 en un punto de E 3 , está
su matriz de disposición A. De acuerdo con los resultados de los ejercicios
de la sección 1 del capítulo II,
Cuando este número sea + 1, diremos que el sistema ele referencia e 1 ,
ez, e 3 está positivamente orientado (o que es de mano derecha) ; cuando
es -1, el sistema de referencia está negativamente orientado (o es de
mano izquierda) .
Omitiremos la demostración fácil de los enunciados siguientes.
3.1 CoMENTARIO. 1) En cada punto de E 3 , el sistema de referencia
asignado por el campo natural de sistemas de referencia U 1 , U 2 , U 3 está
positivamente orientado.
2) Un sistema de referencia e 1 , e 2 , e 3 está positivamente orientado si
y solo si e, X ez = e 3 • De esta manera podremos determinar para propósitos prácticos la orientación de un sistema ele referencia mediante la
"regla de la mano derecha" que dimos al final ele la sección 1 del capítulo II. En el aspecto visual, el sistema (P) de la figura 3.3 tiene orientación positiva, mientras que el sistema de referencia (N) la tiene negativa. En particular, los sistemas de referencia de Frenet están siempre
positivamente orientados, puesto que, por su definición, B = T X N.
3) En un sistema de referencia positivamente orientado e,, e 2 , e 3 , los
procluctos vectoriales son
e] = e:? X e" = -e" X ez
ez = e., X e, = -et X e3
e3 = e, X
Cz
= -ez
X
C¡.
(N)
(P)
e,
Figura 3.3
e,
129
ORIENTACIÓN
En un sistema de referencia negativamente orientado, se deben invertir
los vectores de cada producto vectorial. (No es necesario memorizar estas
fórmulas: la regla de la mano derecha las dará correctamente.)
Puesto que hemos dado un signo a cada sistema de referencia de E 3 ,
pondremos a continuación signo a todas las isometrías F de E 0 • En el
capítulo II, demostramos el muy conocido hecho de que el determinante
de una matriz ortogonal es o bien + 1, o bien -l. Por lo tanto, ~ C es
la parte ortogonal de la isometría F, definimos el signo de F como el eleterminante de e, con la notación
sgn F = det C.
Sabernos que el mapa de derivadas de una isometría transforma sistemas de referencia en sistemas de referencia. El resultado siguiente nos
aclara lo que sucede con sus orientaciones.
SI
3.2 LEMA. Si e 1 , e", e 3 es sistema de referencia en un punto de E 3 y
F es isometría, entonces
Demostración. Si ei = ,~ ail,U~c, entonces, según la versión en coordenadas del teorema 2.1, tenernos que
F,(ei)
= ~ c;~cajl,Ü;
i,lc
donde C = (cii) es la parte ortogonal de F. Es así como la matriz de disposición del sistema ele referencia F* ( e 1 ) , F* ( e 2 ) , F* ( e 3 ) es la matriz
(~c;~caj~c)
,,
=
(~ci~c 1 a~ci)
,,
= C 1A.
Pero el triple producto escalar ele un sistema ele referencia es el determinante ele su matriz ele disposición, y, por definición, sgn F = det C. En
consecuencia,
F,(e1 )•F*(e2 ) X F*(e 3 ) = det (C 1A)
= det C·det tA = det C·det A
1
Este lema nos enseña que, si sgn F = + 1, entonces F,, transforma
sistemas ele referencia positivamente orientados en sistemas de referencia
GEOMETRÍA EUCLIDIANA
130
positivamente orientados, y que transforma los sistemas de referencia nega~
tivamente orientados en sistemas de referencia negativamente orientados.
Por otra parte, si sgn F = -1, los positivos se transforman en negativos, y
los negativos en positivos.
3.3 DEFINICIÓN. De una isometría F de E 3 , se dice que
conserva la orientación si sgn F = det
invierte la orientación si sgn F = det
donde
e
e
e
=
+1
= - 1
es la parte ortogonal de F.
3.4 EJEMPLO
1) Traslaciones. Todas las traslaciones conservan la orientación. Esto
tiene claridad desde el punto de vista geométrico, y, en realidad, la parte
ortogonal de una traslación T es simplemente el mapeo identidad I, de
manera que sgn T = det I = +l.
2) Rotaciones. Consideremos la transformación ortogonal
que dimos en el ejemplo 1.2, que imparte una rotación a E 3 que recorre el
ángulo B alrededor del origen. Su matriz es
e
cos B
[
-sen()
sen B
cos B
o
o
En consecuencia, sgn e = clet e =
orientación (véase el ejercicio 4) .
+ 1,
~]
de manera que
e
conserva la
3) Reflexiones. Se puede ver (literalmente) la inversión ele la onentación si se emplea un espejo. Supongamos que el plano yz ele E 3 es nuestro
espejo. Si miramos hacia ese plano, el punto p = (p 1 , p2 , P3 ) aparece
ubicado en el punto
(figura 3.4). El mapeo R que hemos definido de esta manera se llama
reflexión en el plano yz. Es evidentemente una transformación ortogonal
con matriz
131
ORIENTACIÓN
Por consiguiL·nte, R es una isometría que
invierte la orientación, como nos lo confirma el hecho experimental de que la
imagen especular de la mano derecha
es la mano izquierda.
Tanto el producto \TCtorial como el
producto escalar se definieron originalmente en términos de coordenadas euclidianas. Hemos visto que el producto
escolar se determina por medio ele la
misma fórmula
Vista lateral del pLwo !J _
Figura 3.4
al margen del sistema ele referencia t> 1 , ee, e;; que se emplee para obtener
las coordenadas de v y w. Para los productos \'ectoriales tenemos casi el
mismo resultado, pero aquí inten·iene la orientación.
3.5 LJ·:MA. Sea e 1 , e 2 , e 3 un sistema ele referencia en un punto de
v;ei y w = 2: wiei, entonces
E3 • Si v = _¿
donde
E=
e1•e 2 X e 3
=
+1.
Demostración. Será suficiente el desarrollo del prodm:to vectorial
por medio ele las fónnulas (3) del comentario 3.1. Por ejemplo, si el sistema
de referencia está positivamente orientado, obtendremos
Puesto que, en este caso, E = 1, obtenemos el mismo resultado en el miembro derecho de la ecuación que queríamos demostrar.
1
De esto se desprende inmediatamente que el efecto de una isometría
en los productos vectoriales implica también cuestiones de orientación.
3.6 TEOREMA. Sean v y w vectores tangentes a E 3 en p. Si F es isometría de E 3 , entonces
132
GEOMETRÍA EUCLIDIANA
Demostración. Ponemos v = -;EuiU;(p)
tinuación, sean
y w = -;EwiU;(p). A con-
Puesto que F* es lineal,
El cálculo directo, en que se aplica el lema 3.5, nos hace ver que
donde
Pero U,, U 2 , U" está positivamente orientado, de manera que, según el
lema 3.2, se verifica que E = sgn F.
1
EJERCICIOS
1. Demuéstrese que
sgn (FG) = sgn F·sgn G = sgn (GF).
Dedúzcase que sgn F = sgn (F- 1 ).
2. Si H 0 es una isometría de E 3 que invierte la orientación, demuéstrese
que toda isometría que invierte la orientación tiene una expresión única
como l! 0 F, donde F conserva la orientación.
3. Sean v = (3, 1, -1) y w = (- 3, -3, 1) vectores tangentes en un
punto. Si e es la transformación ortogonal que vimos en el ejercicio 4
de la sección 1, compruébese la fórmula
C.(v X w) = sgn
e e*(v)
X e*(w).
4. Una rotación es una transformación ortogonal e tal que det e = + l.
Demuéstrese que e, efectivamente, somete a E 3 a una rotación alrededor de uno de los ejes. Hágase ver explícitamente que, dada una
rotación e, existen un número {} y puntos e 1 , e 2 , e 3 , en los que
e;•ei = 8 ij, tales que (figura 3.5)
133
GEOMETRÍA EUCLIDIANA
e (Ct)
e (e2)
=
=
COS {f el
+
sen {f
sen {f
el
+
-
C2
cos {}
e2
(Indicación: El significado de que la dimensión ele E" sea impar es que e tiene una raíz
característica + 1, de manera que existe un
punto p=f=O tal que e(p) =p.)
S. Sea a un punto E" con la propiedad de que
que la fórmula
e (p)
=
a X p
Figura 3.5
11
a
11 =
l. Demuéstrese
+ p•a a
define una transformación ortogonal. Descríbase su efecto general en E 3 •
6. Demuéstrese que
a) El conjunto Q+ ( 3) de todas las rotaciones de E 3 es subgrupo del
grupo ortogonal O ( 3) (véase el ejercicio 8 de III.l) .
b) El conjunto (;+ de todas las isometrías que conservan la orientación
en E 3 es subgrupo del grupo euclidiano G.
7. Encuéntrese una sola fórmula capaz de expresar todas las isometrías
de la recta real E 1 . Hágase lo mismo en el plano E 2 (úsese E = -+-1) . De
estas isometrías, ¿cuáles son las que conservan la orientación?
4
Geometría euclidiana
Al abrir este capítulo, hicimos un recordatorio de una característica fundamental de la geometría plana: si existe una isometría que lleve un triángulo a otro, entonces los dos triángulos (que son congruentes) tienen
exactamente las mismas propiedades geométricas. Si examinamos detenidamente este concepto, veremos que es un enunciado que no admite demostración; constituye, de hecho, la definición de la "propiedad geométrica de un triángulo". Con más generalidad, podemos decir que la
geometría euclidiana se define como la totalidad de conceptos qu~ se ven
conservados por las isometrías del espacio euclidiano. Por ejemplo, el
corolario 2.2 nos enseña que la idea del producto escalar de vectores
tangentes pertenece a la geometría euclidiana. De la misma manera, el
teorema 3.6 nos hace ver que, con la excepción posible del signo, el producto vectorial también queda conservado por las isometrías.
Esta famosa definición de la geometría euclidiana es un poco generosa,
sin embargo. En la práctica, la unidad de significación "geometria euclidiana" se suele referir solamente a los conceptos que las isometrías.
134
GEOMETRÍA EUCLIDIANA
conservan, aunque no lo hagan mapeos arbitrarios, o inclusive los mapeos
de clase más restringida ( difeomorfismos) que tienen m apeos inversos.
Un ejemplo nos puede ayudar a aclarar un poco más esta distinción. Si
a = (a 1 , a~, a 3 ) es una curva de E:1, entonces las diversas derivadas
a'=
tj_a_l: ~11!~ da-"-)
( dt' dt' dt '
a
,
tienen aspectos bastante parecidos. Ahora bien, al interpretar el teorema
7.8 del capítulo I decíamos que la velocidad queda conservada jJor los
m a j;eos arbitrarios F: E"~ E 3 . Es decir, que si fJ = F (rr), entonces fJ' =
F,.(a'). Pero se ve con facilidad que los maj;eos a, !Jitrarios no conscruan
la aceleración. Por ejemplo, si a ( t) = (t, O, O) y F =
, )', z), entonces
a"= O; en consecuencia, F.,.(a") =O. Pero (J ~= F(a) tiene la f{nmula
fJ(t) = (t 2, O, O), de manera que fJ" = 2U 1 . Por consiguiente, en este caso,
fJ = F(a), mientras que fJ"=/=F(a"). Dentro de un momento, sin embargo, veremos que la aceleración se ve conservada por las isometrías.
Por esta razón, la idea de velocidad corresponde al cálculo del espacio
euclidiano, mientras que la de aceleración corresponde a la geometría cm·lidiana. En esta sección \·amos a examinar algunos de los conceptos rpw
definimos en el capítulo II y demostraremos que, de hecho, L1s isnnwtrías
los conservan. (En gran parte, hemos dejado al lector la tarea de n:rificar
que los difeomorfismos no los conservan.)
Recordemos la idea ele campo vectorial en una curva (definición 2.2
del capítulo II). Si Y es campo vectorial en a: I ~E\ y si F: E'1 ~ E 3
es cualquier mapco, entonces Y = F.,. (Y) es campo vectorial en la curva
Imagen ¡¡; = F(a). En realidad, para cada t en I, Y(t) es un vector
Y(t)T
Y(t)
a(t)
~
I
Figura 3.6
tangente a E 3 en el punto a ( t) . Pero entonces Y ( t) = Fr, (Y ( t) ) es un
vector tangente a E 3 en el punto F(a(t)) = a(t). (La figura 3.6 ilustra
estas relaciones.) Las isometrías conservan las derivadas de esos campos
\Tctorialcs.
Gf,OMETRÍA EUCLIDIANA
135
4.1 CoROLARIO: Sea Y un campo vectorial en una curva a de :€·\
y sea F isometría de E". Entonces Y = F,. (Y) es campo vectorial en
a=F(a),y
Y'= F:(Y').
Demostración.
Calcularemos F* (Y')
y Y' a partir de la q:presión
de Y en términos de sus funciones coordenadas euclidianas. Para diferenciar
un campo vectorial así, se diferencian simplemente sus funciones coordenadas euclidianas, de manera que, aquí,
Y'=2:dYiu ..
dt
J
Por consiguiente, según la versión en coordenadas del teorema 2.1, concluimos
que
F,(Y')
=:S c;i r~~; [h
Por otra parte,
y= F,.(Y) = 2:
C;jyj
U;.
Pero cada c;i es constante, puesto que, por definición, son elementos de la
matriz de la parte ortogonal de la isomctría F. En consecuencia,
Por lo tanto, los campos vectoriales F,. (Y') y
Y' son iguales.
1
Afirmábamos antes que las isomctrías conservan la aceleración: s1
F (a), donde F es isometría, entonces a" = F,, (a") . Esto es co.nsecuencia inmediata del resultado anterior, puesto que si ponemos Y = a', entonces, por el teorema 7.8 del capítulo J, Y = a', y de aquí se desprende que
a
=
Haremos ver a continu~:ción que el aparato ele Frenet de una curva
queda conservado por las isometrías. Esto es de esperarse, desde luego,
sobre b~tscs puramcnle intuitivas, debido a que un movimiento rígido del
136
GEOMETRÍA EUCLIDIANA
plano debe llevar una curva a otra que se vuelva y se retuerza exactamente de la misma manera. Y esto es lo que sucede cuando la isometría
conserva la orientación.
4.2 TEoREMA. Sea f3 una curva de rapidez unitaria en E 3 con curvatura positiva, y sea {i = F(/3) la curva imagen de f3 bajo una isometría
F de E 3 • Entonces
7 = sgn F
donde sgn F
T = F,,(T)
N= F,,(N)
lJ = sgn F F,(B)
r
= -+- 1 es el signo de la isometría F.
Demostración. Adviértase que
taria, puesto que
11
fi' 11
=
ji
es también una curva de rapidez uni-
fl F,,(fJ') fl
=
fJ'
11
11
= l.
Por tanto, las definiciones de la sección 3 del capítulo II se aplican tanto
a f3 como a [3, de manera que
Puesto que F conserva tanto la aceleración corno las normas, de la
definición de curvatura se desprende que
/3" 11
K= 11
=
11
F,.(fJ") 11 =
11
/3"
11
=
K.
Para obtener el sistema completo de referencia de Frenet, emplearemos
aquí la hipótesis de que K > O (que implica K> O, puesto que K = K).
Por definición, N = f3" j K; por consiguiente, al aplicar resultados anteriores, encontramos
(P") =
jj" F,(fJ") F, N=-::-=---=
K
K
F,(N).
K
Solamente nos falta demostrar los casos interesantes de B y r. Puesto
que la definición B = T X N contiene un producto vectorial, nos valemos
del teorema 3.6 para obtener
lJ = 't X N= F,,(T) X F,.(N) = sgnF F,(T X N) = sgnF F,(B).
En esencia, la definición de torsión dice que r = - R'•N = B·N'. Por
consiguiente, al aplicar los resultados anteriores acerca ele B y N, obtenemos
7
= B•N' = sgnFF*(B)•F,(N') = sgn_FB•N' = sgnFr
1
137
GEOMETRÍA EUCLIDIANA
La intervención de sgn F en la fórmula de la
torsión de F(f3) nos enseña que la torsión de una
curva da una descripción de la curva que es más
sutil de lo que aparentaba ser hasta aquí. El signo
de T mide la orientación de la torsión de la curva.
Si F invierte la orientación, la fórmula :¡: = - r
nos demuestra que la torsión de la curva imagen
F ( f3) es t'Xactamente opuesta a la de la misma f3.
Cn ejemplo sencillo nos ayudará a entender esta
inversión
z
4.3 EJEMPLO. Sea f3 la hélice de rapidez unitaria
f3 (s)
=
(
Figura 3.7
S sen -S, -S) ,
cos -,
e
e
e
que tomamos el ejemplo 3.3 del capítulo II al poner a = b = 1; en con= ·../2. Por las fórmulas gFnerales de las hélices, sabemos que
Sea a continuación R la reflexión en el plano xy, de manera
que R es la isornetría R ( x, y, z) = ( x, :v, - z) . Por lo tanto, la curva
secuencia, e
K
=
T
=
imagen
1.
j3
=
R ({3) es la imagm especular
{3-( s )
=
( cos -S, sen S
- , - -S)
e
e
e
de la curva original. Podemos ver en la figura 3. 7 que el efecto del espejo
es el habitual: f3 y j3 se tuercen en sentidos opuestos; si f3 es "de mano
derecha", entonces j3 es "de mano izquierda". (El hecho de que f3 ascienda
mientras que f3 desciende es en sí mismo irrelevante.) Para expresarnos
formalmente, diremos que la reflexión R invierte la orientación; en consecuencia, el teorema nos predice que "K = K = } y que :¡: = - T = -1.
Puesto que f3 es simplemente la hélice del ejemplo 3.3 del capítulo II,
donde hemos puesto a = 1 y b = - 1, podemos verificarlo por medio de
las fórmulas generales que dimos allí.
EJERCICIOS
1. Sea F = TC una isometría ele Ea y definamos f3 como curva de rapidez
unitaria en E 3 . Demuéstrese que
a) Si .!3 es hélice cilíndrica, entonces F ({3) es hélice cilíndrica.
b) Si la imagen esférica de f3 es
F(f3) es C(f3).
p,
entonces la imagen esférica de
138
GEOMETRÍA EUCLIDIANA
2. Sea Y= (t, 1 - t 2 ,
1+
t 2 ) un campo vectorial en la hélice
a(t)
y sea
e
=
(cos t, sen t, 2t),
la transformación ortogonal
o
11v2
r;v2
Calcúlense a= C(oc) y y= C,.(Y), y \Trifíqucsc que
e rY') =
Y',
C.,. (a") =
a",
} 71 - " o
•n:
3. Trácense los triángulos en E" con vértices en
Hágase ver que los dos triángulos son congruentes al exhibir una isometría F que transforma 6. 1 en L'l.". (Indicación: La parte ortogonal de F
no se altera al trasladar los triángulos.)
E-'~ E" es un mapeo tal que F,:. conserva los productos escalares,
hágase ver que F es una isometría. (Indicación: Aplíllucse el ejercicio
11 ele II.2.)
4. Si F:
5. Sea F una isometría de E 3 . Para cad': campo vectorial V, sea V el
campo \Tctorial tal que F:(V(p)) = V(F(p)) para todo p. Demuéstrese que las isornetrías conservan las derivadas covariantes; rs decir,
hágase ver que 'VvW = 'VvW.
S
Congruencia de curvas
En el caso de curvas en E 3 , la idea general de congrucne1a adguiere la
forma siguiente.
5.1 DEFINICIÓN. Dos curvas a, [3: I ~ E 3 son congruentes cuando existe
una isometría F de E 3 tal que f3 = F(a); es decir, que f3(t) = F(a(t))
para todo t en l.
Desde el punto de vista intuitivo, las curvas congruentes son iguales
\en todo, excepto su posición en el espacio. Represrntan viajes a la misma
·velocidad jwr trayectorias de la misma forma. Por ejemplo, la hélice
a(t) = (cos, t, sen t, t) gira en espiral alrededor del eje de las z exacta-
CONGRUENCIA DE CURVAS
f39
mente de la misma manera ·en que gira la hélice f3 (t) = (t, cos t, sen t)
alrededor del eje de las x. Es evidente que estas dos curvas son congruentes,
puesto que si F es la isometría definida por
entonces F(a) = (3.
Para decidir si dos cun·as dadas a y f3 son congruentes, no ·resulta
práctico ir probando todas las isometrías ele E 3 para \·er si encontramos
alguna que transforme a a en (3. Lo que queremos es una descripción
de la forma de una curva de rapidez unitaria, cuya precisión sea tanta,
que si a y f3 tienen la misma descripción, ello baste para afirmar que son
congruentes. Sin duda, el lector ya sospecha que la descripción adecuada
consiste en la curvatura y la torsión. Para demostrar esto, necesitamos
establecer un resultado preliminar.
Las curvas cuya congruencia se establece por medio ele una traslación
se definen como paralelas. Por tanto, las curvas a, (3: I ~ E 3 serán paralelas si y sólo si existe un punto p en E' tal que (3(s) = a(s) + p para
todo s en I, o, en nuestra notación funcional, (3 = a + p.
5.2 LEMA. Dos curvas a, (3: I ~E'; son paralelas si sus vectores de velocidad a'(s) y J3'(s) son paralelos para cada s en l. En este caso, si
a(.1 0 ) = (3(s.a) para algún valor s0 en I, entonces a= J3.
Demostración. Por definición, si a' ( s) y J3' (s) son paralelos, tienen
las mismas coordenadas euclidianas. Por tanto,
da
--,-':. (S)
as
= dj3
__':. (S J
ds
para 1 < i < 3
donde a; y {3; son las funciones coordenadas euclidianas de a y (3. Pero,
por resultados del cálculo elemental, la ecuación da;/ ds = dj3;/ ds implica
que existe un valor constante jJ; tal que {3; = ai + p;. En consecuencia,
fJ = a + p. Además, si a ( s 0 ) = (3 (s.a), deducimos que p = O; en consecuencia, a = (3.
1
5.3
J<a
=
Kil
TEOREMA.
Y
Ta
=
Si a, f3: I ~ E" son curvas de rapidez unitaria tales que
-+T11 , entonces a y J3 son congruentes.
Demostración. Nuestra demostración se compone de dos pasos principales:
1) Se substituye a por una curva congruente adecuadamente cscoglcla, F(a).
2) Se hace ver que F(a) = (3 (figura 3.8).
Para hacer la elección en ( 1), nos valdremos del teorema 4.2. Tomemos
un llÚwcro fijo, que puede ser el O, en el inten·alo l. Si T a = T ,,.• sea, en ton-
140
GEOMETRÍA EUCLIDIANA
ces, F la isometría (que conserva la orientación) que convierte el sistema
de referencia de Frenet T(O), N(O), B(O) de a en .cx(O) en el sistema de
referencia de Frenet T(O), N(O), B(O) de f3 en f3(0). (El teorema 2.3
nos garantiza la existencia de esta isometría.) Denotemos el aparato de
Frenet de a= F(cx) por "K, 1', T, N, B; entonces tenemos inmediatamente,
gracias al teorema 4.2 y a la información anterior, la conclusión
a(O)
= f3(0)
K=
K/3
7'(0) = T(O)
N(O)
=
N(O)
B(O)
=
B(O).
a(O)
(:j:)
= P(O)
Figura 3.8
Por otra parte, si T a = - T 13 , elegimos F como la isometría (que invierte la orientación) que transforma a T 0 (0), N 0 (0), /3 0 (0) en a(O)
en el sistema de referencia T(O), N (O), - B(O) en (3(0). (Los sistemas
de referencia de Frenet están siempre positivamentc orientados; por lo
tanto, este último sistema de referencia está negativamente orientado; por
eso F invierte la orientación.) Entonces se desprende del teorema 4.2 que
las ecuaciones ( +) también son válidas para a = F (a) y (3. Por ejemplo,
B(O) = - F, (B"'(O)) = 13(0).
En el paso 2 de la demostración, exhibiremos la igualdad '[' = - T; es
decir, que las tangentes unitarias de a= F(a) y ./3 son paralelas en cada
punto. Puesto que a(O) = f3 (O), tenclrC'mos, gracias al lema 5.2, que
F(o:) = (3. Consideremos, en el intervalo I, la función de valores reales
f = T•T +
N•N + ii-B. Puesto que éstos son campos vectoriales unitarios, la desigualdad ele Schwarz nos enseña que
'T•T<l;
141
CONGRUENCIA DE CURVAS
además, T•T = 1 si y sólo si T = T. Podemos hacer comE'ntarios parecidos acerca de los otros dos términos de f. Por lo tanto, es suficiente mostrar
que f tiene el valor constante 3. Por ( :j:), f (O) = 3. Consideremos a continuación
f' =
f'·T
+
T'•T
+
N'•N
+
N•N'
+ B'·B +
B•B'.
Por medio de algunos cálculos sencillos podemos terminar la demostración. Se substituyen las fórmulas de Frenet en esta última expresión
y se usan las ecuaciones K" = K, 7 = T de ( :j:) . Los ocho términos resultantes
se cancelan por pares, de manera que f' = O, y entonces f tiene, en efecto,
el valor constante 3.
1
Es así como se determina una curva de rapidez unitaria en todo menos
su posición en el espacio por medio de su curvatura y su torsión.
En realidad, al demostrar el teorema 5.3 hemos hecho algo más que
establecer la congruencia de a y f3; hemos visto la manera de calcular
exjJlícitamente una isometría que transforme a en {3. Pondremos como
ejemplo de esto el siguiente caso especial.
5.4 EJEMPLO. Consideremos las curvas de rapidez unitaria n, (3:
R ~ E" tales que
a (s) = (cos
f3 (s) =
~, sen :_ , :_)
e
e e
S S S)
(cos -e , sen -e , - -e
donde e = y 2. Es obvio que estas curvas son congruentes, y se les puede
superponer por medio de una reflexión -son las hélices del ejemplo
4.3-; sin embargo, vamos a hacer caso omiso de eso con el objeto de
describir un método general para calcular la isometría que se requiere.
De acuerdo con el ejemplo 3.3 del capítulo II, a y f3 tienen la misma
curvatura, Ka = ·J = K13 ; pero sus torsiones tienen signos opuestos,· Ta =
f = - T fl' Por consiguiente, el teorema nos predice la congruencia por
medio de una isometría que inviPrta la orientación, F. Por la demostración, vemos que F ha de transformar el sistema de referencia de Frenet
T,(O)
(O, a, a)
No:(O)
( -1, O, O)
B,(O)
(0, -a, a)
142
GEOMETRÍA EUCLIDIANA
en el sistema de referencia
T0 (0)
(0, a, -a)
N[l(O)
( -1, O, O)
-1313 (0)
(0, -a, -a)
donde a = 11ft (Estas fórmulas explícitas también se obticnel'l a partir
del ejemplo 3.3 del capítulo IT.) Según el comentario que se hizo después del teorema 2.3, la isometría F tiene parte ortogonal e = t BA, donde
A y B son las matrices de disposición de los dos sistemas de referencia
anteriores. Por consiguiente,
e=
[
~ ~ ~1[-~ ~ ~1 [~ ~ ~1
-
-a
-
O -a
O
-a
O O
a
-1
puesto que a = 11 \(2. Estos dos sistemas de referencia tienen el nusmo
punto de aplicación a(O) =(3(0) = (1,0,0). Pero C no hace nada a
este punto, ele manera que la parte de traslación ele F es simplemente el
mapa identidad. Por lo tanto, hemos encontrado (correctamente) que la
reflexión F = C transforma a en (3.
Desde el punto de vista de la geometría euclidiana, dos curvas de
E' son "iguales" si difieren solamente en una isometría de E 3 • Por ejemplo,
¿qué es una hélice? No es solamente una curva que gira en espiral alrededor del eje de las z, corno teníamos en el ejemplo 3.3 del cZ!pÍtulo II,
sino que tmnbién lo son cualesquiera curvZIS que sean congruentes con
una de esas hélices especiales. Se pueden dar fórnmbs gener;:¡les, pero la
mejor cZ!racterización es la siguiente.
1
5.5 CoROLARIO. Sea a una curva ele rapidez unitaria en E 3 • Entonces a será una hélice si y sólo si tanto su curvatura como su torsión son
constantes diferentes de cero.
>
Demostración. Para cualesquiera números a
O y b =!= O, sea f3a,b
la hélice especial que describimos en el ejemplo 3.3 del capítulo II. Si
a es congruente con f3a,b, entonces (si cambiamos el signo de b, en caso
de que resulte neces;:¡rio), podemos suponer que la isometría conserva la
orientación. Por tanto, a tiene curvatura y torsión
7
= a~
b
+
b".
Supongamos recíprocamente que a tierw K y T constantes y distintos
de cero. Al resolver la ecuación anterior, obtenemos
143
CONGRUENCIA DE CURVAS
a=
T
> +-ri •
b
Por lo tanto, a y f3a,b tienen la misma curvatura y torsión y, en consecuencia, son congruentes.
1
Hasta aquí, hemos pedido para nuestros resultados la condición de
rapidez unitaria, pero esta restricción se debilita con facilidad:
5.6
Sean a, (3: 1 ~E·' curvas de rapidez arbitraria. Si
CoROLARIO.
0'
V =V,>
a
¡J
y
T
= +r 13 ,
0
entonces las curvas a y f3 son congruentes.
Demostración. Sean a y jj reparametrizaciones de rapidez unitaria de
= O. Puesto que a y (3 tienen la
misma función de rapidez, concluimos inmediatamente que también poseen
la misma función de longitud de arcos= s(t), y, por consiguiente, la misma función inversa t = t(s). Pero, debido a que
a y (3, ambas basadas en, por ejemplo, t
y
deducimos de las definiciones generales de curvatura y torsión de la
sección 4 del capítulo II que
K-(s)
a
=
1<
r-(s)
a
a
(t(s)) =K (t(s)) =K (s)
=
/3
{l
r (t(s)) = ±r (i (s)) = +rc;(s).
a
{3
¡¡
En consecuencia, el teorema de congruencia ( 5.3) nos hace ver que a y (3
son congruentes, y podemos poner F (a)
isometría transforma a en [3, puesto que
=
(3. Pero entonces esta misma
F(a(t)) = F(a(s(t))) = F(jj(s(t))) = F(f3(t)).
1
La teoría de curvas que hemos construido se aplica solamente a curvas
regulares de curvatura positiva, puesto que son las únicas curvas para las
que es posible, en general, definir el campo de sistemas de referencia de
frcnet. No obstante, una curva a completamente arbitraria de E" se
puede estudiar por medio de un campo arbitrario de sistemas de referencia, es decir, cualesquiera tres campos vectoriales unitarios E 1 , E:, E 3 en a
que sean ortogonales en cada punto (figura 3.9).
144
GEOMETRÍA EUCLIDIANA
Figura 3.9
Por ejemplo, el teorema de congruencia 5.3 se puede extender con facilidad a curvas arbitrarias.
5.7 TEOREMA. Sean a, f3: 1 ~ E 3 curvas arbitrarias, y sea E 1 , E e, E 3
un campo ele sistemas de referencia en a; F 1 , F", F 3 un campo de sistemas
de referencia en [3. Si
(1 < i < 3)
(1 < i, j < 3) J
1) a'•E; = f3'•F;
2) E;'·Ei = F;'•Fi
entonces a y f3 son congruentes.
Demostración. Lo único que necesitamos es generalizar la argumentación del teorema 5.3. Fijemos un número en 1; tomemos, por ejemplo,
el O. Sea a continuación F la isometría que transforma
E1 (O), E e (O), E" (O)
a
Puesto que F,, conserva los productos escalares, tenemos que E; =
F,(E.¡) (1 < i < 3) es un campo de sistemas de referencia en a= F(a).
Puesto que F,, conserva las velocidades y también las derivadas de un
campo vectorial, deducimos que
a(O)
= [3(0)
(:j:)
E; (O) = F; (O)
para
1 < i,j< 3.
La última ecuación quiere decir que podemos poner E;; = }:a;iEi
y F;' = ,}:aiiFi con las mismas funciones coeficientes aii· Adviértase que
aii + aii =O. (Diferénciese E;·Ei = ll;j.) Si f = :¿ E;•F;, demostraremos,
como lo hicimos antes, que f = 3, puesto que
Por tanto,
E; = F.; ( ¡ paralelismo!)
y de (:!:) se desprende que
y
[3'
=
:¿ f3'•F; F;
145
CONGRUENCIA DE CURVAS
son paralelos en cada punto. Pero a(O)
lema 5.2,
F(a) =
á
=
{3(0); en consecuencia, por el
1
= {3.
Necesitaremos esta medida de generalización en el capítulo VI, sección 8. Hay una versión más elegante (aunque un poco menos general) de
este teorema en el ejercicio 3.
EJERCICIOS
1. Dada una curva a = ( a 1 , a 2 , a 3 ) : 1 ~E", demuéstrese que f3: 1 ~ E 3
es congruente con a si y sólo si podemos expresar f3 como
2. Sea a la curva del ejemplo 4.4 del capítulo II. Encuéntrese una curva
(congruente) de la forma y(t) = (at, bt 2 , ct 2 ) y una isometría F tales
que F(a) = y.
3. Sea E 1 , E 2 , E 3 un campo de sistemas de referencia en E 3 con formas
duales ()¡ y formas ele conexión Wii· Demuéstrese que dos curvas a,
{3: I~E3 son congruentes si tenemos que B;(a') = 0¡({3') y "'ii(a')
= '"ii (/3') para 1 < i, j ::::=:: 3.
4.
~fuéstresc
que la curva
{3(t)
=
(t
+ yJ SC'll t, 2 COS t, yJ t
- sen t)
es una hélice al calcular su curvatura y su torsión. Encuéntrese una
hélice a de la forma (a cos t, a sen t, bt) y una isometría F con la
propiedad de que F (a) = f3.
5. Sean a, f3: 1 ~ E 3 curvas congruentes en las que
que hay solamente una isometría F tal que F (a) =
tenga r = O, en cuyo caso hay exactamente dos.
> O.
Hágase ver
{3, a menos. que se
K
6. (Continuación). Encuéntrense las dos isometrías que llevan la parábola a(t) = ( -f2t, t 2 , O) a la parábola f3(t) = ( -t, t, t 2 ) .
7. Si f3 es una curva ele rapidez unitaria en E', C'ntonces toda reparametrización de rapidez unitaria
Si f3 y
ji son congruentes,
ji ele f3 tiene la forma ji (s) = f3 (-+- s + s0 ).
~sto representa una simetría ele la trayectoria
146
GEOMETRÍA EUCLIDIANA
común de f3 y (3. Demuéstrese que las rutas helicoidales son completamente simétricas. Hágase ver explícitamente que la hélice f3 del ejemplo 3.3 del capítulo II es congruente con toda rcparametrización de
rapidez unitaria, por medio del clescubrimirnto concrrto ele la isomctría F = TC tal que F(f3) = (5.
a: 1 -ó> E" y ¡3: 1 -ó> E" tienen trayectorias co~gruentes
cuando existe una isometría F tal que F (a) es reparametrización
de (3.
a) Hágase ver que las curvas de rapidez unitaria a y f3 tienen trayectorias congruentes si y sólo si existe un número s0 tal que Ka ( s) =
K (Es +so)
y •Js) = -+-, (Es + s0 ) , donde E es o bien +1, o
11
13
bien -1.
b) Si a es la curva del ejercicio 2 de I I.4 hágase Hr que a y f3 =
( et, e-t /2, t) tienen trayectorias congruentes. Exhíbase la isometría F = TC y la rcparametrización que se requiere para satisfacer
la definición.
Los tres ejercicios siguientes se refiercn a curvas en E 2 .
8. Dos curvas
9. Dada una función cliferenciablet cualquiera K en un intervalo 1> elemuéstrese que hay una curva a ele rapidez unitaria en E 2 tal que K es
la función ele curvatura ele a. (Indicación: Encuéntrese una fón~mla
ele integral de a al invertir el orden ele los rrsultaclos del ejercicio 8 de
II.3.)
1O. Encuéntrense curvas planas ---con cualquier parametrización convcniente- para las que a) K ( s) = 1 / ( 1 + s2 ),
b) K(s) = 1/s (s > 0!,
donde s es la longitud de arco.
11. Demuéstrese que dos curvas de rapiclrz unitaria y en E 2 son congruentes si y sólo si Ka = ±'B.
6
Resumen
El resultado básico ele este capítulo consiste en que una isometria arbitraria del espacio euclidiano se puede expresar de manera única como
transformación ortogonal seguida de una traslación. Sus consecuencias
principales son que el mapa ele derivadas ele una isometría F, en cada
punto, es en esencia simplemente la parte ortogonal ele F, y que hay una
isometría única que transforma un sistema de referencia dado en otro.
t Aun cuando K no sea más que continua, obtenemos una curva doblemente
diferenciable. Podemos demostrar resultados parecidos con respecto a curvas de E 3
por medio de sistemas de ecuaciones diferenciales .ordinarias. Véase Willmorc [3}.
RESUMEN
147
De esta manerz1, queda reducida a una cuestión de rutinas la comprobación de los conceptos que definimos antes para descubrir cuáles de ellos
pertenecen a la geometría euclidiana, es decir, cuúlcs conservan las isometrías del espacio euclidiano. Por último, demostramos una versión análoga
para las curvas ele los muy conocidos teoremas acerca de triángulos de
la geometría plana, de "lado-ángulo-lado'' y "lado-lado-lado." :\ saber,
hicimos ver que la curvatura y la torsión (y la rapidez) constit~1yen una
condición necesaria y suficiente para que dos curvas dadas sC'an congruentes. Además. vimos la manera de c:dcubr cxplícitanwntc la isometría que
se rec¡merc.
CAPITULO
IV
en una superficie
Abriremos este capítulo con la definición de superficie en E 3 y con la
descripción de algunas maneras estándar de construir superficies. Aunque
este concepto es uno con el que estamos más o menos familiarizados, se
sabe en medida mucho menor de lo deseable que cada superficie posee un
cálculo diferencial y un cálculo integral que se comparan en un sentido
estricto con el cálculo habitual del. plano euclidiano E". Los elementos
ele este cálculo -funciones, campos vectoriales, forma:> diferenciales, mapeos- pertenecen estrictamente a la superficie, y no al espacio euclidiano
E 3 dentro del que se ubica la superficie. Esto es tan así, que veremos en
la última sección que este cálculo sobrevive intacto cuando eliminamos E"
y dejamos solamente la superficie y nada más.
Las superficies en E 3
En principio, una superficie en E 3 es un subconjunto de E 3 , es decir, una
colección determinada de puntos de E 3 . Por supuesto, no todos los subcon juntos serán superficies: hemos de requerir, des cJe. luego, que las superficies sean lisas y bidimensionales. Las dos definiciones siguientes cumplen la tarea de expresar estos requisitos en términos matemáticos.
1.1 DEFINICIÓN. Una carta de coordenadas x: D
de un conjunto abierto D de E 2 a E 3 .
~
E 3 es un mapeo
La imagen x(D) de una carta de coordenadas x -es decir, el conjunto de todos los valores de x- es un subconjunto liso y bidimensional
de E 3 (figura 4.1). La regularidad (definición 7.9 del capítulo I) es,
tanto en una carta como en una curva, una condición básica para que
sean lisas: se aílaclc el requisito c;e ser uno a uno para evitar que x(D)
se corte a sí misma. Además, con d fin de ahorrarnos algunas dificultades
(ejemplo 1.71, cmpkarcmr;:; a veces cartas pro j;ias, que son bs cartas en
bs que la función inversa x': x(D) -'>D es continua (es decir, que
tiene funciones coordenadas continuas) . Si pens:m10s en D como una !á1+9
LiO
EL CÁLCULO EN UNA SUPERFICIE
z
V
X
Figura 4.1
nuna delgada de gom~l, obtendremos x(D) al dobLu· y estirar D df' una
manera qw~ no sea excesivamente violf'nta.
Para construir una definición adecuada de supf'rficic, partimos de la
idea burda de que cualquier región sufitientemente jJequáía de una superficie M se parece a una región del plano E". La explicación anterior
nos hace \·f'r que podernos dar más precisión a esta idea si decirnos: se
puede exjJresar ¡\[ en la arcanía de cada uno de sus puntos como imagen
de una carta jnojJÍa. ( CuZJndo la imagen de una carta x está contenida
en Af, decirnos que x es carta dentro de Af.) Para obtener la forma definiti\·a de nuestra clcfinici{•n, sólo nos falta definir una vecindad ~77 de p
en lvf corno el conjunto que consta de Af cuya distancia euclidiana de p es
menor que un número E > O.
1.2 DFFTNICH.lN. Cna sufJerficie en E-' es un subconjunto Af de E"
con la propiedad dt> que. para cada punto p dé' JJ, f"xiste una carta propia
dentro ele Af cuya imagen contiene un;1 wcinclad ele p en lvf (figura 4.2).
Las superficies con que nos hemos Í<1miliarizado en el cálculo elemcnt<ll
satisfacen esta definición: por ejemplo, wrificaremos que la esfera unitaria
~ de E 3 es una superficie. Por definición, ~ se compone de todos los
puntos cuya distancia al migf"n es la unidad; esto significa que se compone de los puntos p tales que
Para verificar la definición anterior, empezaremos por encontrar una carta
propia dentro de ~ que cubra una vecindad del polo norte (0, O, 1).
V
~
Figura 4.2
Lo\S SUPERFICIES EN E 3
151
z
n
(u, v) <->(u, v, O)
X
Fisura 4.3
Observemos que, al dejar caer cada punto ( q 1 , qc, q:;) del hemisferio
norte de 2; sobre el plano xy en ( q 1 , q", O), obtenernos una correspondencia
uno a uno de este hemisferio con un disco D de radio 1 en el plano xy
(véase la figura 4.3). Si identificarnos este plano con E" por medio de
la asociación natural ( q 1 , q 2 , O) ~ ( q1 , q 2 ), entonces D se couvierte en el
disco de E" que consta de todos los puntos (u, v) tales que u 2 + v2 < l.
Al expresar esta correspondencia corno función D, encontramos la fórmula
x(u.
v)
=
(u,
v-r=u
v,
2
v").
-
Por lo tanto, x es una función uno a uno que va de D sobre el hemisferio norte de ~- Afirmamos que x es una carta propia. Las funciones
coordenadas ele x son diferenciables en D, de manera que x es mapeo. Para
exhibir la regularidad ele x, calcularemos su matriz jacobiana (o transpuesta)
[
au
r ~Eau ~Ll
l
1
a_!t_
()u
~u
av a¡
av av av
o
=
o
~Ll
au
a¡
av
donde f = y 1 - u 2 - v 2 • Es evidente que las filas de esta matriz siempre
son linealmente independientes, de manera que, en cada punto, tiene
rango 2. Por consiguiente, de acuerdo con el criterio expresado inmediatamente después de la definición 7.9 del capítulo I, x es regular, y en
consecuencia, es una carta. Además, x es propia, puesto que la función
inversa x- 1 : x (D) ~ D está dada por la fórmula
x-1(p1,p2,p3)
=
(p1,Pc),
de manera que es claramente continua. Observemos, por último, que la
carta x cubre una vecindad de p = (0, O, 1) en~- Cubre, en efecto, una
\Tcindad de todo punto q del hemisferio norte ( figur<l 4.4).
152
EL cÁ::...CULO EN UNA SUPERFICIE
z
n
X
Figura 4.4
De manera estrictamente análoga, podemos encontrar una carta propia
que cubra cada uno de los otros cinco hemisferios de coordenadas de :S,
con lo que verificamos, según la definición de 1.2, que :S es superficie.
Nuestro propósito real ha sido aquí dar un ejemplo de la definición 1.2;
muy pronto encontraremos una manera mucho más rápida de demostrar
(en particular) que las esferas son superficies.
La argumentación anterior nos enseña que si f es cualquier función
en un conjunto abierto D ele E 2 , diferenciable y de valores reales, entonces
la función x: D -7 E 3 tal que
x(u, v)
(u, v,f(u, v))
es una carta propia. Decimos que las cartas ele esta clase son cartas de
Afonge.
Pasaremos a continuación a estudiar algunos métodos estándar para
construir superficies. Observemos que la imagen A1 = x(D) de una sola
carta propia satisface inmediatamente 1.2; en ese caso, lvf se llama superficie simple. (Es así como la definición 1.2 nos dice que podemos obtener
cualquier superficie de E 3 al pegar unas con otras superficies simples.)
1.3 EJEMPLO. La superficie M: z = f(x, y). Toda función j, diferenciable en E 2 determina una superficie lv! en E 3 : la gráfica de f, es decir, el
conjunto de todos los puntos de E 3 cuyas coordenadas satisfacen la ecuación z = f(x, y). Es evidente que Af es la imagen de la carta de Monge
x(u,v)
= (u,v,f(u,v));
en consecuencia, por los comentarios anteriores, concluimos que A1 es
una superficie simple.
Si g es una función en E" de valores reales y st e es un número, denotaremos por M:g = e el conjunto de todos los puntos p tales que g(p) =c.
Por ejemplo, si g es una distribución de la temperatura en el espacio, entonces M: g = e consistirá en todos los puntos cuya temperatura es c. Hay
una condición sencilla que nos dice cuándo uno de estos subconjuntos
ele E 3 es una superficie.
LAS SUPERFICIES
153
EN E 3
1.4 TEOREMA. Sea g una función diferenciable en E 3 de valores reales, y sea e un número. El subconjunto M: g(x, y, z) =e de E 3 será una
superficie cuando la diferencial dg no sea cero en ningún punto de M.
(Tanto en la definición 1.2 como en este teorema suponemos tácitamente que hay algunos puntos en A1; por lo tanto, la ecuación x 2 + y2 +
z 2 = -1, por ejemplo, no nos define una superficie.)
z
1
1
r-----~'------r---------y
!~
LVvt,
p,., O)
+4
(pt, p2)
X
Figura 4.5
Demostración. No haremos más que dar contenido geométrico a un
famoso resultado del cálculo avanzado: el teorema de la función implícita.
Si p es un punto de Af, hemos de encontrar una carta propia que cubra
una vecindad de p en M (figura 4.5). Ahora bien,
ag
dg = - dx
ílx
ag dy + ag
-z- dz.
+ -;;-cy
0
Por Jo tanto, la hipótesis acerca de dg equivale a suponer que, por lo
menos, una de estas derivadas parciales no vale cero en p, y podemos
poner (og/oz) (p) =PO. En este caso, el teorema de la función implícita
nos dice que, en las inmediaciones de p, la ecuación g ( x, ;·, z) = e se
puede resolver para z. El resultado es más preciso: podemos afirmar que
existe una función diferenciable de valores reales h, definida en una vecindad D de (jh, jJc) tal que
1) Para cada punto (u, v) de D, el punto (u, v, h(u, v)) está en M;
es decir, que g(u, v, h(u, v)) =c.
2) Lospuntosdclaforma (u,v,h(u,v)) en los que (u,v) está en
D, llenan una vecindad de p en 111.
154
EL CÁLCULO EN UNA SUPERFICIE
De esto se desprende inmediatamente que la carta de :Monge x: D ~ E'1
tal que
x(u, v) = (u, v, h(u, v))
cumple con lo que la definición 1.2 pide. Puesto que tomamos p como
cualquier punto de A1, concluimos que A1 es superficie.
1
Cuando M: g = e es superficie, se dice que M está definida implícitamente por la ecuación g = c. Aquí ya resulta muy fácil demostrar que las
esferas son superficies. La esfera ::S en E'1 de radio r > O y centro en e =
( c1, c 2 , c 3), es el conjunto ele todos los punz
tos que distan r de c. Si g = ::S(xi- e¡)",
entonces se define implícitamente a ¡ por
medio de la ecuación g = r2 • Ahora bien,
dg = 22;(x¡- c¡)dx¡, y, en consecuencia, dg es cero sólo en el punto e, que
no está en ::S. Por tanto, ::S es superficie.
X
Por medio de este teorema y de la idea
de curva que se definió en la página 31,
deduciremos dos tipos de superficies que
son bien conocidos.
Figura 4.6
1.5 EJEMPLO. Cilindros. A medida que una recta L, perpendicular a
un plano P, se desplaza a lo largo ele una curva
en P, va barriendo un
cilindro. Para ser más concretos, sea P el plano xy, ele manera que L sea
siempre paralela al eje de las z, como se ve en la figura 4.6. Si la curva
e se da como
e
f
f
f
sea la función en E 3 tal que (p 1 , p2 , p3 ) = (pl, p"). Entonces, es evidente que el cilindro que resulta se determina por
La definición ele curva ele la página 31 pide que, en cada punto de
o bien 2/ /ex, o bien of (oy sea diferente de cero. Puesto que
a!
;,- (p,, P:, Pa)
G.t'
=
a¡
"uX
e,
(pJ, ih),
o/oy, concluimos que dg no es nunca cero
en un punto de 1\:f. Por tanto, A1 es superficie.
Cuando C es una circunferencia, obtenemos un cilindro circular
Jf: x" + y'l = r" en E 3 .
En el ejemplo 1.5, construirnos una superficie por un procedimiento
que, en esencia, era la traslación ele una curva; obtendremos otra a continuación por medio ele la rotación. de una curYa.
y puesto que lo mismo pasa con
LAS SUPERFICIES EN E 3
155
1.6 EJEMPLO. Superficies de revolución. Sea C una curva de un plano
P, y sea A una recta de P que no se corte con C. Si esta generatriz e gira
alrededor del eje A, genera una sujJerficie de revolución lvf en E 3 • Vamos
a comprobar, por medio del teorema l .4, que M es en realidad una
superficie. Para tener más sencillez, supondremos que P es un plano de
coordenadas y que A es el eje de coordenadas que le corresponde; usemos
respectivamente el plano xy y el eje de las X. Puesto que e no debe
cortarse con A, supondremos que queda en la mitad superior (y'> O)
del plano xy. A medida que C gira, cada uno de los puntos ( q 1 , q", O) de
e da lugar a una circunferencia completa de puntos
(q1, q" cos v, q" sen v) en M,
Inversamente tendremos que un punto p
sólo si el punto
para
=
0 :S: V< 2.
(p 1 , p 2 ,
p3 ) está en A1 sz )'
e
está en
(figura 4.7).
Si la generatriz es e: f (x, y) = e, definimos uua función g en E'3 como
g(x, y, z). = f(x, y'y"_-i-_:Z._"). Entonces, por la argumentación anterior,
vemos que la superficie de revolución que resulta es exactamente
Af: g ( x, y, z) = c. Por medio ele la regla de la cadena, no es difícil wrificar que dg no es nunca cero en A!, de manera que 1\1 es superficie.
Las circunferencias en Af que cada punto de C genera, bajo revolución, se llaman paralelos ele ¡\J y las diferentes posiciones de
a medida
que gira cn rotación se llaman meridianos de AJ. Esta terminología proviene de la geografía de la esfera; sin embargo, la esfera no es superficie
de revolución de acuerdo con la definición anterior. Su generatriz corta
dos veces el eje de revolución, de manera que dos "paralelos" se reducen
a simples puntos. Para simplificar los enunciados de los teoremas siguientes, emplearemos en cste caso una terminología ligeramente distinta; véase
el ejercicio 12.
e
y
z
Figura 4.7
156
EL CÁLCULO EN UNA SUPERFICIE
E:
D
1
-7r
1
V
1
1
7r
u
~
E'
ffi
1
1
A
Figura 4.8
En el ejemplo siguiente, destaca la necesidad de la condición de propiedad de las cartas de la definición 1.2.
1.7 EJEMPLO. Supongamos que doblemos una tira rectangular de latón
de la manera que se ve en la figura 4.8, para formar un 8. La configuración M que resulta de ello no satisface nuestra idea intuitiva de lo que
debería ser una superficie, puesto que, a lo largo del eje A, Af no se parece
al plano E 2, sino a dos planos que se intcrsectan. Para e:>presar esta construcción en términos matemáticos, sea D el rectángulo -" < u < ,.,
O< u< 1 en E", y definamos x: D ~ E 3 como x(u, v) = (sen u, sen 2u, v).
Se comprueba con facilidad que x es una carta, pero su imagen Af = x(D)
no es una superficie: x no es carta jno j1ia. La continuidad falla en
x- 1 : .H--'> D, puesto que, en un sentido amplio, para devolver A1 a D, x-1
debe desgarrar .M a lo largo del eje A (el eje de las z de E 3 ) .
Según el ejemplo 1.6, el conocido toro de revolución T es una superficie (figura 4.19). Si trabajamos un poco más, podremos construir toros
dobles de diversas formas, como se ve en la figura 4.9. Si añadimos "asas"
y "tubos" a las superficies existentes, es posible ~por lo menos, en principio~ construir superficies con el grado de complejidad que se quiera
(figura 4.10).
Figura 4.9
Figura 4.1 O
LAS SUPERFICIES EN E 3
157
EJERCICIOS
1. Ninguno de los subconjuntos siguientes ltf de E 3 es superficie. ¿En
qué puntos p resulta imposible encontrar una carta propia dentro
de M que cubra una vecindad de p en i\1? (Hágase un bosquejo de
M; no es necesario dar las demostraciones formales.)
a) El cono Af: z~ = x" + y 2 •
b) El disco cerrado .M: x 2 +y~< 1, z =O.
e) El plano doblado Af: xy =O, x >O, y> O.
2. Un plano en E:; es una superficie M: ax + by+ cz = d> donde es
necesario que los números a, b, e no sean todos cero. Demuéstrese que
es posible describir todo plano de E 3 por medio de una ecuación
vectorial como la de la página 75.
3. Hágase un dibujo de la forma general de la superficie M: z =
ax 2 + by 2 en cada uno de los casos siguientes:
a) a> b >O
e) a> b =O
b) a > O > b
d) a = b = O.
4. En los casos siguientes, ¿donde es el mapeo x: E 2 ~ E 3 una carta?
a) x(u,v) = (u,uv,u).
b) x(u,v) = (u 2 ,u 3 ,v).
e) x(u, u) = (u, u 2 , v + v 3 ).
d) x(u,v) = (cos2rru,sen2rru,u).
Recuérdese que x es uno a uno s1 y sólo s1 x(u, v) = x(u1, v1)
implica que (u, v) = ( u1, v1).)
5. a) Demuéstrese que Af: ( x 2 + y 2 ) 2 + 3z~ = 1 es superficie.
b) ,;Para qué valores de e es .\f: z(z- 2) + xy =e superficie?
6. Determínese la intersección z = O del sillín de mono
M: z
= f(x,y),
con el pbno xy. ¿En qué regiones del plano es
¿De dónde viene el nombre de esta superficie?
7. Sea x: D
~
f>
O? ¿Y
f < O?
E 3 un mapeo en el que
x(u, v) = (x1(u, v), xz(u, v), Xs(u, v)).
a) Demuéstrese que un punto p = (p 1, p2 , p 3 )
imagen x (D) si y sólo si las ecuaciones
P1 = x1(u>u)
fiz = .cz(u,v)
P:~
de E 3 está en la
= X:o(u,v)
se pueden resolver para u y v, con (u, v) en D.
b) Si para todo punto p en x(D) sucede que estas ecuaciones tienen
solución única u= fl(pi,pz,h), v = fz(PJ,jJz,Ps), donde (u,v)
158
EL CÁLCULO EN UNA SUPERFICIE
están en D, demuéstrese que x es uno a uno y que x- 1 : x(D)
se determina por la fórmub
8. Sra x: D
~E"
~
D
la función definida pm
x(u, v)
=
(u", uv, z·")
en el primer cuadrante D: u > O, u > O. IIágase \lT que x es uno
a uno y encuéntrese una fómmla ele su función im·ersa x- 1 : x(D) ~D.
Demuéstrese a continuación que x es una carta propia.
9. Sea x: E 2
~E·'
el mapeo
x(u, v) = (u
+
Demuéstrese que x es una carta
superficie M: z = (x" -y") j4.
v, u - v, uv).
prop~a,
y que la Imagen ele x es la
1O. Si F es isometría de E 3 y si Jvf es superficie en E'\ demuéstrese que b
imagen F(M) es también superficie en E'. (Indicación: Si x es carta
adentro de M, entonces la función compuesta F(x) es regular, puesto
que F(x),,, = F,x,., de acuerdo con el ejercicio 12 de 1.7.)
11. La afirmación del ejercicio 1O conserva su validez cuando F es simplemente un difeomorfismo. Demuéstrese el siguiente caso especial:
si F es difeomorfismo de E'3 entonces la imagen de la superficie
M: g =e es Af: g =e, donde g = g(F- 1 ) , y M es superficie. (Indicación: Si dg(v) cFO en p de 111, hágase ver, por medio del ejercicio
9 de I.7, que dg(F.v) cF O.)
es una función diferenciable y si f(x, y2 ) =e define una curva
e del plano xy, entonces e es simétrica con respecto al eje de las X )'
corta este eje una wz (si e es un arco) o dos veces (si e es cerrada).
Demuéstrese que si e gira alrededor del eje de las X se obtiene una
superficie "H en E 3 • Decimos que M es una superficie aumentada de
revolución; si se eliminan los puntos comunes con el eje, se convierte
en una superficie de revolución ordinaria (figura 4.11) .
12. Si
f
Figura 4.11
159
LOS CÁLCULOS EN LAS CARTAS
2
los cálculos en las cartas
En la sección 1, las cartas de coordenadas nos sirvieron para definir una
superficie; consideraremos a continuación algunas propiedades de las cartas
que se aplican con utilidad al estudio de las superficies.
Sea x: D ~E" una carta de coordenadas. Si mantent'mos a u o a v
como constantes en la función (u, v) ~ x(u, 1') se obtienen cun·as .• Tenemos explícitamente que, para cada punto (un, u 0 ) en D, en la cun·a
se llama curva u-jJaramétrica, v = v 0 , de x; y la curva
v ~ x(uo, v)
es la curva v-paramétrica, u = u 0 (figura 4.12).
Curvas v-paramétricas
V
1
¡
(uo, Vo)
Vo
Curvas uparamétricas
(mn
Ea
--~-----4~-----·u
x(uo, vo)
Uo
V = Vo
Figura 4.12
Es así como la imagen x(D) queda cubierta por estas dos familias
de curvas, que son imágenes bajo x de las rectas horizontales y verticales de
D, y una cun·a de cada familia pasa por cada punto de x(D).
2.1
DEFINICIÓN.
Si x: D
~
E" es una carta, para cada punto ( u 0 , v 0 )
de D:
1) El vector de velocidad en u 0 de la curva u-paramétrica, v = v 0 , se
denota por x, (u o, Vn) .
2) El vector de velocidad en v 0 de la curva v-paramétrica, u = u 0 ,
se denota por Xv (U o, V o) .
Figura 4.13
160
EL CÁLCULO EN UNA SUPERFICIE
Los vectores Xu (U o, v 0 ) y Xv ( u 0, v 0 ) se llaman velocidades parciales de
en (u 0 , v 0 ) (figura 4.13).
Por consiguiente, Xu y Xv son, en realidad, funciones en D cuyos valores
en cada punto (u 0 , vo) son vectores tangentes a E' en x(u 0 , v 0 ). La intención con que se ponen los subíndices u y v es la de sugerir la diferenciación
parcial. Si, en efecto, definimos la carta en términos de sus funciones
coordenadas euclidianas por una fórmula como
X
x(u, v) = (x1(u, v), xc(u, v), x"(u, v) ),
entonces se desprende de la definición anterior que las funciones parciales
de velocidad se definen por
Xu
=
X =
• v
(ax\
~X2' ~" 3 )
OU OU
Oll
X
(oxl
a~ OX:l) .
ov' ov' eu
x
El subíndice x (que omitiremos con frecuencia) es recordatorio de que
xu(u, v) y xv(u, v) tienen como punto de aplicación x(u, v).
2.2 EJEMPLO. La carta geográfica en la esfera. Sea 2: la esfera de
radio r > O centrada en el origen de E 3 . La longitud y la latitud de la
Tierra nos sugieren una carta dentro de 2: muy diferente de la carta de
1fonge que nos sirvió para la :S de la sección 1. El punto x (u, v) de ~
de longitud u(-;;-< u<-;;-) y latitud <'( --::-/2 < v < -;;-/2) tiene las
coordenadas euclidianas (figura 4.14) .
x(u,v)
=
(rcosvcosu,rcosvsenu,rsenv).
Con el dominio D de x que hemos definido por medio de estas desigualdades, la imagen x(D) de x es la totalidad de 2: con la excepción
de una semicircunferencia que va del polo norte al polo sur. La curva
z
V
.(u, v
--~------~------~--u
D
Figura 4.14
y
LOS CÁLCULOS EN LAS CARTAS
161
x.( Uo, Vo)
Figura 4.1 5
u-paramétrica, v = v 0 , es una circunferencia: el paralelo de latitud v 0 •
La curva v-paramétrica, u = u 0 , es una semicircunferencia: el meridiano
de longitud Uo.
Calculamos las velocidades parciales de x corno
Xu(u, v) = r( -cos v ~en u, cos v cos u, O)
Xv(u, v)
=
r( -sen v cos u, -sen v sen u, cos v),
donde r nos denota una multiplicación escalar. Es cYidente que x,. srempre
;¡punta lucia el este y x, hacia el norte. Dentro de unos momentos, haremos
la demostración formal de que x es cana dentro ele 2: (figura 4.15).
Para hacer la prueba de que un subconjunto dado M de E" es una
superficie, la definición 1.~ nos pide C'artas propias (y el ejemplo l. 7 nos
cnseiia el moti Yo de ello). Pero, en cuanto sabemos que ltf es una superficie, hacemos a un lado la condición de propiedad (ejercicio 14 de la
sección 3). Además, en muchas situacione;;, la restricción de inycctiviclad
(uno a uno) ele las carLlS también se puede suprimir.
2.3 DEFINICIÓN. Un mapco regular x: D---¿ E 3 cuya imagen descansa
en una superficit· Af se llama jJmamctri::.aciún de la región x(D) en ltf.
(Por consiguiente, una carta no es más que una pararnetrizaciém uno
a uno.) En los casos favorables. esta imagen x ( D) podrá ser la totalidad
ele la superficie 1\1, y entonces tendremos la analogía de la idea más
conocida ele la parametrización ele una curva (pág. 31.) La importancia
ele las parametrizaciones es primordial en los cálculos prácticos ele superficies, de manera que consideraremos los caminos que podemos seguir para
determinar si un m apeo x: D ---7 E 3 es parametrización de (parte de una)
superficie dada M.
Por supuesto, se ve con claridad que la imagen de x debe descansar
en M. Observemos que si la superficie se define en la forma implícita
162
EL CÁLCULO EN UNA SUPERFICIE
M: g = e, eso significa que la función compuesta g(x) ha de tener el
valor constante c.
Para probar la regularidad de x, se empieza por observar que las curvas
paramétricas y las velocidades parciales Xn y x, están bien definidas para
un mapeo diferenciable arbitrario x: D ~E". Ahora bien, las dos últimas
filas del producto vectorial.
Ox1
Xn
X
uu
Xv =
!
1
oxl
12;-
Oxz
Ox:-;
:Ou
,(Ju
1
ox2
ov
nos dan la matriz jacobina (transpuesta) de x en cada punto. Por tanto, la regularidad de x equivale a la condición de que xu X x, no sea
nunca cero, o, por las propiedades del producto vectorial, de que en cada
punto (u, v) de D los vectores de velocidad parcial de x sean linealmente
independientes.
Vamos a probar estos métodos en el mapco x que dimos en el ejemplo
2.2. Puesto que la esfera se define implícitamente por g = x" + y2 +
z 2 = r2 , debemos hacer ver que g(x) = r 2 • Si substituimos las funciones
coordenadas de x por x, y y z, obtenemos
r- 2 g(x)
(e os v cos u) 2 + (e os v sen u) 2 + sen 2 u
cos 2 v + sen 2 v = l.
Al calcular brevemente, con la ayuda de las fórmulas de
mos en el ejemplo 2.2, obtenemos
r- 2
Xu
X
xv
Xn
y x, que pusi-
= cos u cos 2 v U 1 +sen u cos 2 v U 2 + cos v sen v U,.
< <
Puesto que -"/2
v
"/2 en el dominio D de x, cos v no es nunca
cero en ese lugar; pero sen u y cos u no son nunca ambos cero, de manera
que Xu X ~no puede ser nunc_a c~~o en D. Por lo tanto, x es regular, y, en
consecuencia, es una parametnzacwn.
.
Para hacer ver que x es una carta, demostraremos que es uno a
uno, es decir, que x(u, v) = x(u 1, v1 ) implica que (u, v) = (uh v1 ). Si
x(u, v) = x(1h, v1 ), entonces la definición de x da tres ecuaciones de
coordenadas :
r cos v cos u = r cos v1 cos u 1
1••
r cos v sen u
=
r sen v =
r cos v1 sen u 1
r sen
V 1•
Tenemos nuevamente, puesto que - "/2 < v
de D, que la última ecuación implica que v
< "/2
=
V¡.
para todos los puntos
Por lo tanto, r cos v =
LOS CÁLCULOS EN LAS CARTAS
163
r cos u1 > O puede quedar cancebdo en l<Is dos primeras Pl'ltaCJoncs, y
podemos concluir que, también, u = u 1 •
Estos resultados se pnrden ccmider<~r obvios c·n est;¡ función p:1rticular
x fll ::S a p<~rtir de b rxplic:tción del ejemplo 2.2, pero los métodcs r¡uc
ac~dnmos de emplC''H nos snúrán en c;,sos más difíciL·:;.
\'eremos a continuación la manera de enconlr:tr par;nrl('trizaciorws naturales en cilindros y en superficil~S dt" revolución.
2.4 E.ru.rPLO. L:t paranwtrización ele un cilindro Al. Supongcnnos,
como b hicimos en el ejc·1nplo l._\ que ;1,! es el cilindro que se lc\·:m1a
sobre una curva e:f(x,y))=a en_el plano xy (figura 4.1ti). Si
a: =e (a, O:c, O) es par,mJetrización ele e, afirmamos que
x(u,v)
=
(a:l(u),a:c(u),u)
es parametri;-:ación de JI. Se ve claramente que x descansa en Jf. cubre
por completo a Af y es difcrenciabk. Adcmús, x es regular, pues, en cada
punto, las velocidades parciales
Xu
=e~~'~~', Ü)
Xv =
(0, O, 1)
son linealmente inclcpcndicnlPs íx 11 no vale nunca cero, puc,to que. por
definición, a: es regular). Si se ha definido la curva a: en un intervalo I,
el dominio de '' es la franja vertical D: u cn /, con v arbitrZ~ri;L (Por
consiguil'nlc, si I es toda la recta real, D es E".) f ,as curvas u-paramétricas
ele x son meramente traslados ele C, y se llaman curvas de sección trans\'(-r;.;d dl'! cilindro. Las curvas v-param(tricas siguen las nTtas que se
lbrnan rayos (o "elementos") del cilindro. Si
no es curv;t cerraJa,
e
X
Figura 4.16
164
EL CÁLCULO EN UNA SUPERFICIE
entonces a -y, en consecuencia, también x- es uno a uno, con lo que
se descubre que x es una carta. Pero si C es cerrada, x envuelve a D
un número infinito de veces alrededor de C.
2.5 EJEMPLO. Paramctrización de una superficie de revolución. Supongamos que obtenemos Af, como se hizo en el ejemplo l.G, con una curva
e que gira en la mitad superior del plano xy alrededor del ejf~ ele. bs X. Sea
a continuación
a(u) = (g(u), h(u), O)
parametrización ele e (obscrvell!OS qu(' /¡ > o) . Como hicimos nctar en
el ejemplo 1.6, cuando el punto (g (u)' h (u)' o) de la curva perfil e ha
recorrido en su rotación un ángulo v, llega a un punto x(u, v) con la
misma coordenada .Y: g (u), pero de coordenadas y y z nuevas, que son
respectivamente h(u) cos 1' v h(u) sen u (figura 4.17). Por lo tanto, se
tiene que
·u),h(u) cosz•,h(u) ,;env)
x(u, v) =
Esta fórmula define evidentemente un l!lapco en J[ cuya imagen es la
totalidad de 1H. Por medio de cálculos breves, \TillOS que x" y Xv son
siempre Encéllme!ltc independientes, de manera que x es par~unetrización
de /if. Corno vimos en el ejemplo 2.4, el do!llinio D ele x consiste Pn todos
lm puntos (u, v) tales que u pertenece al dominio de a. Las cnrvas u-paramC·tricas ele x paramel rizan los meridianos de j[; las cury;¡' '·-par;unétricas hacen lo mismo con los par:lldos. (En consecuencia, la p:tLtmctrización x: D --~ Jf no es nunca uno a uno.)
Se entiende ob\·iamente que no estamos limitados a la rotación ele
curvas del plano xy alrededor del eje de las :e Pero si ]¡accmo:; otras elecciones de coordenadas, consen·;nnos el mi~;mo significado geométrico de
las funcim1l"i g y h: g mide la distancia a lo lar,¡; o del t·je ele re\·o!uci:m,
mientras que h widc la distancia a fJarúr del cjc d~, rcYoluc;ún.
y
(g(u), h(u), O)
1
:~
\h(u)
\
1
-'}--......;..'-l..--- X
Af
z
/
Figura 4.17
165
LOS CÁLCULOS EN LAS CARTAS
En realidad, la carta geográfica de la esfera es un caso del ejemplo 2.5
(donde se han invertido la u y la u) ; he aquí otro más.
2.6 EJEMPLO. El toro de revolución T. Esta es la superficie de revolución que se obtiene cuando la generatriz C es una circunferencia. Supongamos que e es la circunferencia del plano xz con r:Hlio r > O y centro en
(I( O, O). La rotación será alrededor ele] eje ele bs z: en consccurneia,
hemos ele requerir que R > r, p::lra e\·itar e¡ u e e corte, o toq<w el ~ je de
revolución. Una parametrización natural (figura 4.18) de
es
e
a (u)
(R
=
+
r e os u ,r sen u) .
Por lo tanto, ele acuerdo con los comentarios anteriores, lwhrl'mos ele tener
g ( 11) = r '''!1 u, que es la distancia a !o largo del eje ele las z, y h (u) =
R + r cos u. c¡ue es la distancia desde el cic ele bs z. La :1rgumentación
general del ejemplo 2.5 -si permut2mos los ejes de coordenadas- resulta,
entonces, en la p:1ramctrización
x( u, v)
( h (u) eos u, h (u) sen z·. g (u) 1
((R
+ rcosu)
cosu(R
+
rcosu) scnu,rsenu).
El dominio ck x es el pbno completo E", y ( con1o sucede sie-:npre que
b cun·a perfil es cerrada) x es ¡wrióclica t:mto t'n u como en u. En este caso,
x(u
+ 2c:-, '' + 2c:-) =
x(u. n)
para todo (u, v).
Tby un:1 infinidad de parametrizaciones (Y cartas) diferentes en cualquil·r supc:·ficic. Las que hemos explicado fueron escogidas gracias a la
naturalidad con que se ajustiln a sus sup¡:orficies.
EJERCICIOS
1. Encuéntrese una paramctrización de la superficie completa que se
obtiene con la revolución de:
a) C: J! = COsh X 2lredeclor de] eje eJe ]as X ( Catcnoiclc).
b) C: (::- 2) 2 + y 2 = 1 alrededor del eje ele las y (toro).
() e: z = x" alrededor del eje de las :: (paraboloide de revolución).
z
z
11
¡-:¡gur~~
4.13
Finura 4.i9
166
EL CÁLCULO EN UNA SUPERFICIE
2. Se han definido las velocidades parciales Xn y Xr para un mapeo arbitrario x: D ____.¿E';, de manera que es lícito que consideremos las funciones de valores reales
e=
x,·x,.
en D. Demuéstrese que
]j Xu
X
X,.
11" =
R(; -
F
Dedúzcase que x es un mapeo regubr si y ~;ólo si FG - F" no es
nunca cero. (Con frecuencia, ésta es la n1ancra m(ts L'tcil de comprob:u
la regularidad. La significación geométrica ck ('SL1> funciones se <"'.:plicmá en V.4.)
3. Demuéstrese que
es un toro de lTvolución: encuéntrese nna ele las circunfercncias perfil
y el eje ele revolución.
1.-na superficie reglada es una superficie qué' g:enrra una rrcta I"
que o(' mueve sobre una curva (3. Las diversas posici(•ncs ele la recta
generatriz L se llaman rayos de la superficie. L'na superficie así tiene
sil'rnpre una paramctriz~1ción en forma reglada
x(u, v)
=
(3(u)
+
1'
8(u)
(3(vi +u 8(v)
o
donde decimos que (3 es la curva base, y 8 la curua r!irrctriz. De manera
alterna, podemos visuilliz:1r 8 como campo vectorial en (3. Suele ser
necesaria la rf'stricción de v a algún intervalo. ele marwra que los rayos
pueden no ser rectas completas.
4. II:cgasc ver que la silla de montar .A1: z = X)' estú clobkmente reglada:
encuéntrense dos parametrizaciones regladas con rayos diferentes
5. Cn cono es una superficie reglada con paranwtrización de la form:::1
x(u>v) =p+v3(u).
Por lo tanto, todos los rayos pasan por el vértice p (figura 4.20).
Hágase ver que la regularidad de x equivale a que tanto· v como
8 X 3' no ~can nunca cero. (Por consiguiente, el vértice nunca forma
parte del cono.)
6. LTn cilindro es una superficie reglada con parametrización de la forma
x(u, v)
=
(3(u)
+
vq.
Por lo tan lo. aquí los rayos son todos p:1ralelos (figum 4.21). Demuéstrese que b rcgularidaq de x cqui\'ak a que (3' X q no sea nunca
cero. Hágas~' ver que esta definición viene a generalizar el ejemplo 2.4.
LOS C.~LCULOS EN LAS CARTAS
167
q
Figura 4.20
Figura 4.21
7. Tenemos una recta L que se coloca ortogonalmente~ a un eje A (figura 4.22). Si lo se mueve a lo largo de A a medida que gira -ambas
cosas con \ elocidad constante- entonces L genera un helicoide ll.
Si A es el eje lk las ::, entonces
z
lf es im:-~gcn del m:1peo x: E"--'? E::
tal que
x
(u, u)
(u cos v, u sen u, bu)
(lJ ccJ= 0).
a) Demuéstrese que x es una carta.
b ) Dcscrílxmsc las CUl"\"as parámetro ele x.
e) Exprésese el helicoide en forma
implícita g = c.
A
(0, O, bv
L
8. al Ilágase ver que x: D--'? E' es
un mapeo regular, donde
Figura 4.22
x ( u, v) = (u cos "', u, sen u) en
D: u> O.
b .1 Encuéntrese una función g
y, z) tal que la imagen de x es la
superficie M: g = O.
e) Hágase ver que lvf es superficie reglada y trácesela. (Indicación:
Trabájese a partir de la curva que constituye la sección de M con
el plano y = l.)
9. Sea (3 una reparametrización de rapidez unitaria de la circunferencia
u ni laria en el pbno xy. ( :Cmstrúyase una superficiP reglada de la manera
siguit·ntc: cksplár·esc una recta lo a lo largo ele (3 ele modo que L Sl"a
;icmprr~ ortogonal al radio de b circunferencia y forme un ángulo
com:tante .,¡4 con /3' (figur~~ +.23).
a) Declúzcasc esta paramctrizacién de la supnficic reglada }vf que se
obtiene:
x(u, v) ="j3(u)
+
v((3'(u)
+
TJ;,).
168
EL CÁLCULO EN UNA SUPERFICIE
b) Exprésese explícitamente x en términos de v y las funciones
coordenadas de (3.
e) Dcdúzcase que Af queda dada implícitamente por la ecuación
xz
+
yz _ zz
1.
=
d) Verifíquese que si cambiamos el ángulo de -;o-/"'r a --;o'/4, se obtiene
la misma superficie 1H. Por lo tanto, j',[ está doblcmcn.tc reglada.
e) Trácese esta superficie Af ele manera que se ,-ean los dos rayos que
pasan por cada uno ele los puntos (1, O, O) y (2, 1, 2).
Una mperficie cuádriea es una superficie
!\!: f!. = o para la cual en g 110 inten·icncn
más c¡uc términos cuaclrCtticos en x1, x", X3;
es decir,
u3
L
g
2: aijX;Xj + 2: b;x; +
=
c.
1,)
Figura 4.23
Si hacemos c>xcc>pción de los casos tri,·ialcs, hay
solamente cinco clases ele superficies cuúdricas,
que quedan representadas por las conocidas superficies de los o;iguientes
tres ejemplos (,·éasc el teorema 2.2 ele la púgina 280 ele la obra de Dirkhoff
y MacLane [2]).
1O. En cada uno ele los casos, i) demuéstrese que j f es superficie y
hágase un bosquejo de su forma gcncr:-tl, ii) hágase ver que x es
paramctrización y encuéntrese su imagen en A1.
,2
a) El elipsoide M: ·_ 2
'
a
v"
,z
b
e"
+' + -_
2
=
1
x(u,v) = (acosucosv,bcosusenv,cscnu)
en D: ---:c/2
b) El hiperboloide elíptico, Jf:
x"
a"
y"
+ b"
x(u, u) = (e! cosh u cos v, b cosh u sen v,
G
=
en E 2 .
scnh u)
e) El hiperboloide elíptico (de dos mantos), M:
x(u, v)
<u< --:c/2.
(a senh u cos v, b senh u sen v, e cosh u)
~+
az
y"
-b2- e2
-1
en D; u=FO.
• .
xz
yz
11. El jJaraboloide elz jJtzco A1: z = ---2 + --.
'
a
b"
a) V erifíqucse que Af es supnficic, y que
x(u,v)
=
(aucosu,busenu,u 2 ) ,
n >O,
es una pararnetrizac!ón que omite un solo punto de Af.
b) Descríbanse las curvas parámetro de x en general, y dibújese esta
superficie p:-tra a =. 1, b = 4, junto con algunas cun-as parámetro.
FUNCIONES DIFFRENCIABLES Y VECTORES TANGENTES
169
x"
)'"
12. El j7araboloide hiperbólico, M: z = ,"~
a2
b2
a) I-Iágase ver que x: E 2 - ; . E" es carta propw que cubre por completo a AI, donde
x(u.v)
=
(a(u+z'),b(n-v),4uD).
~Iuéstrcse que 1\I es una supnficic dobkmcnte r;·gbda al expresar de nuevo x en forma n·glacla ele dos maneras difercn"tes.
e) Lo mismo que el inciso ( b) del ejercicio 11.
b)
13. Sea Jf la superficie ck revolución que se obtiene cuanclo gira la curva
t ____,. (g(t), h(t), O) alrededor del eje de bs x(h > 01. \.-erifíc¡uesc que
a) Si ¡;' no es nunca cero, Af tiene una pararnctrización de la forma
x(u, u)
= (u, f(u)
cos z·, f(u) se!l v).
b) Si h' no es nunca cero, ¡\1 tiene una pararnctrización ck la forma
x(u,v) = (/(u),ucosv,uscnu).
3
Funciones diferenciables y vectores tangentes
Darnos comienzo aquí a una exposición acerca del c{tlculo en una superficie
M en E 3 . El espacio E" se ir:C desvaneciendo gradualmente del cuaclro,
hasta que llcr~ucrnos, como met:c final, a un cálculo intrínseco de JI. En
general, el orden de los ternas será el mismo del capítulo I y harc·mos
los cambios que resulten necesarios para aclaptar el cálculo del plano 1<~"
a una superficie Af.
Supongamos que f es una función de \·alores reales que está definida
solamente en una superficie 1\f. Si x: D--) A1 es una carta de coordenadas
dentro ele AI, fntonccs se dice que la función compuesta f(x) es una
ex presión en coordenadas de f; se trata de una función ordinaria de ,-al ores
reales (u, v) ____,. f (x (u, v) ) . Definiremos f como diferenciable siempre que
sus expresiones en coordenadas sean difcrenciablcs, en el scntido euclidiano
que es habitual (definición 1.3 del capítulo I).
En una función F: E"-;. M, cada carta x dentro de Jvf determina una
expresión en coordenadas x-1 (F) de F. Es evidente que esta función compuesta solamente se define en el conjunto () de todos los puntqs p de E"
tales que F ( p) está en x (D) . Definimos nuevamente F corno diferenciable
siempre que todas sus exprcsionfs en coordenaclas también lo sean, en el
sentido euclidiano a que estarnos habituados. [Conviene que entendamos
qu" en esto se incluye el requisito ele que O sea conjunto abierto de En, ele
manera que tengamos bien definida la difercnciabilidad ele x-1 ( F) : G -;. E",
corno hicimos en la sección 7 del capítulo I.]
En particular, una curua a: I ____,. A1 en una superficie A[ es, igual que
antes, una función diferenciable que va de un intervalo abierto I en A1.
170
EL CÁLCULO EN UNA SUPERFICIE
Para ver la manera en que la definición funciona en la práctica, examinemos un caso especial que tiene importancia.
3.1 LEi\!A. Si a: es una curva a:: 1 __,. }.f cuya trayectoria descansa en
la inngen x(D) de una sola carta x, entonces existen en 1 funciones diferenciables (micas a 1 , ac tales que
a:(t) = x(a,(t), ac(t))
para todo t
o, sr nos expresamos en notación funcional, a: = x(a 1 , ae).
gura 1.24.)
(V{~ase
la fi-
Demostracir!n. Por cldinición, la expresión 01 coordenadas x- 1 a:: 1 __,. D
es clifcrcnciable: es simplemente una cun·a en E" cuya trayectoria está en el
clolllinio D el" x. Si a 1 , a" son las funciones coorclrnaclas euclidianas de
x- 1 a, entonces
1\'o hay otras funciones así.. pues si tuviéramos que a: = x( b,, be), entonces
Est:1s funciones a 1 , a" se llaman fzwciuues coordenadas ele la curva a:
con respecto a la carta x. Por rjcmplo, la curva a: que dimos en el iuciso 3 del cje1:1plo 4.2 del capítulo I, descansa en la parte de la esfera ::: de
radio 2 que queda cubierta por la carta x que definimos en nuestro ejemplo 2.2. Observemos que esta curva se mueYe ele manera que en cada
punto tiene la misma longitud y latitud. Sus funciones coordenadas con
respecto a x son, ele hecho, a 1 ( t) = a, ( t) = t, puesto que, según la
fórmula ele x,
x(a 1 ((1,a"(t)) = x(t,t) = 2(cos 2 t,costsent,sent)
a(t).
En una carta arbitraria x: D __,. },1 (como tenemos en el caso que
acabamos ele considerar J es natural que pensemos en el dominio D corno
mapa ele la región x(D) en 1\1. Las funciones x y x 1 establecen una
V
Jr¿;;l;--
-
~·----·-·\-,--1~
""
(at,a.,~
'
(-.J-)
I
Figura 4.24
FUNCIONES DIFERENCIATILES Y VECTORES TANGENTES
171
correspondencia uno a uno entre los objetos de x(D) y los objetos de D.
Si una curva a en x(D) nos represcn·,a d viaje de un navío, la cun·a
coordenada (a t 1 a e) sciíab su posición rn el mapa ]) .
La dPmostración rigurosa ele la siguiente dirmación, cuyo carácter
es bastante técnico, requiere ele los métodos del cálculo avanzado, y, por
esa rilzÓn, nosotros no intentaremos demostrarla aquí.
3.2 Tr:oRE:\IA. Sea J1 una SU]JCTf;cie en E'1• Si F: En----;. E·' es un mapeo ( difcrcnc:iable) cuya imz¡g·en clc·scansa en jf, entonces, al consiclcrz¡rlo
como función F: E" --) ,\!, tenemos que F es clifcrcnciable (en el sentido
definido en b página 169).
Este teorema es un YÍnculo estrecho del cálculo de Af con el cálculo
de E". Por cje1nplo, implica d resultado '·n]lvio" ele que· una curva de
E' que descansa Pn Af es una CUlTa ele JJ.
Pursto que una carta es mn hn 1 ción clifcreneiable que va de (un
conjunto Z!binto ele) E' a E", tcncmc<:. que una cartZl sná clifcrcnciablc
como función que va a Af. En consecuencia, todas ~;us expresiones en coordenadas son difcrt'nciablcs, de manera que' las ca1tas se traslapan con suavidad.
Si x y y son cartZls en una superficie Af en E" con
traslapadas, enümccc; las funciones compucstZls x 1Y y y 'x son
mapcos ( clifcrcnciables) definidos cn coujuutos <1 binlos de E".
3.3
CoROLMuo.
im[tgc~ncs
(La función y- 1 x, por ejemplo, c:,tá definida solamente en los puntos
(u,v) de]) tales que x(u,v) está en b imZlgen y(E) ele y (figura 4.2::iJ.
Por medio de una argumentación pZ!recich a la c¡uc se empleó en el
lcmil 3.1, se puede expresar el corolario 3.3 como
3.4 CoROLARIO. Si x y y son cartas traslapadas en ,U, entonces existen
funciones difcrcnciables y únicas u y ü tales que
y(u, v)
=
x(u(u, v), ü(u, v))
para todo (u, v) en el dominio de x- 1 y. En notación funcional: y =
x( ii, ü).
DI~--,..--Figura 4.25
172
EL CÁLCULO EN UNA SUPERFICIE
Tenemos, por supuesto, ecuaciones simétricas que expresan a x en
términos de y.
Con el corolario 3.3, se vueln' mucho más fácil la tarea de demostrar
la clifcrenciabilidad. Por ejemplo, si f es una función en JI de valores
n·ales, Pn lugar de verificar que todas las expresiones en coordenadas f(x)
~;cm eucliclianamente diferenciablcs, necesitamos solamente vcrifica¡lo para
una cantidad suficiente de cartas x que entre todas cubran por completo
a 1'1 (de manera qurc, con frecuencia, basta con una sola carta). La
demostración es un ejercicio ele comprobaci(m de dominio de funciones
compuestas: en una carta, arbitraria y, la diferenciabilidad ck f x y x- 1 y
implica que fxx- 1 y es cliferenciable. En general, esta función no es igual
a [y, porque su dominio suele ser mucho más pt>qucño. Pero, debido a que
tenrcmos suficientes cartas x para cubrir A1, estas funciones constituyen la
totalidad de fy, y , ele esta manera, demostramos que es difercnci:tblc.
Desde el punto de vista intuiti,·o, es claro lo que significa que un
\·ector sea tangente a una superficie i\1 en E". Podemos b:1sar la definición
formal en la idea ele que una cun;a en j\1 debe tener todos sus vectores
de n~lociclad tangentes a 1H.
3.5 DFFI:'o/ICIÓI\. Sea p un punto ele una superficie Af en E'. Fn H'ctor
tangente va E'' en pes tangente a 11! en p cuando ves \Tctnr ele \·elociclad
de alguna cuna en 11! (figura 4.26).
El conjunto de todos los vectores tangentes a j\f en p se llama plano
tangente de Af en p, y se denota por T¡¡(Af). El resultado siguiente nos
cnsefía que, en particular, en cada punto p de }vf> el plano Umgente TvUvf)
es, en realidad, un subespacio vectorial bidimensional del espacio tangente Tv (E').
3.6 LEMA. SPa p un punto de una superficie A1 en E", y sea x una
c:1rt:1 dentrn de J1 con la propiedad ele que x(un, u0 ) =p. Un vector
Jangente v a F? Pn p es tangente a Af si y sólo si podemos expresar v
como ccm¡LiJución lineal de Xu ( u 0 , u,,) y xv( u 0. l'o).
,----------"-~Tp(M)
--,-,--==---¡--:::'' ',
~-+-------__/·
M
Figura 4.26
173
FUNCIONES DJFERENCIABLES Y VECTORI:S TANGENTES
Puesto que las velocidades parciales son siempre linealmente independientes, deducimos que han constituido una base del plano tangente de Af
en cada punto de x(D).
Demostración. Observemos que las cun·as parámetro de x son curvas
que están en JI, de manera que estas yclocidades parciales son tangentes
a Jf en p.
Supongamos en primer lugar que v es tangente a Jf en p; hay, por
lo tanto, una cun·a a en 1\1 con la propiedad de que a(O) = p y a'(O) = v.
entonces, de acuerdo con el lema 3.1, podemos expresar a como a=
x(a 1, a"); en conse<uencia, al aplicar la regla de la cadena,
a'= Xu(a,, a")
da1
dt- +
rla2
x,Ja1, a") (ft-.
Pero como a(O) = p = x(u 0 , v 0 ) , tenemos que a 1 (0)
En consecuenCia. al evaluar en t = O, obtenemos
,
da1
t
V= a (O) = -d- (O) Xu(u 0 ,
<:' 0 )
+ -da"
·(O)
ct
1
1lo,
ae
(O)
V o.
x,.(u",
Supongamos recíprocamente que se pueda expresar un v-ector tangente
a E" como
V= C1 Xu(Uo,
Al Lacer los cálculos anteriores. ohícm·mos que v es t>l \Tctor de v-elocidad
en t = O ele la curva
t ~ x(u 0 +te,,
Por lo tzmto, v, es tangente a Af en p.
''o+
te").
1
Se deduce razon:oblemcnte, sobre la b:l.'if' de bs propied:1cles gcr.eralcs
de bs derivadas, que el pbno tangente 7'¡¡ ( c\1) es la aproximación lineal de
la superficie Af en las inmediaciones de p.
3.7 DEFE\ICIÓN. Un campo vectorial euclidi~mo Z en una superficie
1\1 en E 1 es una función que asigna a cada punto p de A! un vector tangente Z(p) a E 3 en p.
-
...
Se dice que un campo vectorial euclidiano V en el que cada vector
V(p! es tangente a A1 en p es camjJO 0·ertorial tangente en· lvf (figura 4.27). Es frecuente que se ddinan estos campos vectoriales, no en la
totalidad de Af, sino solamente en una rcgión de 1\f. Como es habitual,
siempre supondremos que hay difcrenciabiliclad (ejercicio 12).
Un vector euclidiano z en un punto p de j f es normal a Af si es ortogonal al plano tangente Tp ("\1), y esto significa que es ortogonal a todos
los vectores tangentes a Jf en p. Y diremos que un campo vectorial Z
en Jf es campo z·cctorial normal en Af siempre que cada vector Z (p)
sea normal a A1.
174
EL CÁLCULO EN UNA Sl:PERFICIE
Puesto que T 11 (Af) es un subcspz1cio bidiwcnsional c'c· 1'1,(E'), hay una
sola dirección que es normal a 111 en p: Todos los \Tc1orcs normales z en
p son colincales. Por tanto, si z no es cero. tenernos que Tr(.\f) consiste
precisamente en los vctlurn de Tp(E'1 ) que son orto[!ona!e.l a z.
Resulta particularml'nte fúcil trab:1jar con campos vectoriales tangentes y normales en una su¡rrfi,·ie dada en forma implícita.
3.8 LEMA. Si Af: g = e es una superficie en E', entoncr·s el campo
vectorial gradiente Vg = 2: (cr;jc.Y; 1/": (que solanwntr· comicleramos en
puntos ck .\fl es un campo vectorial qnc no se ;¡nula l'll la totalidad ele
la superficie .~1.
Demostracir!n. El gradiente no se anula (es decir, nunca \·ale cero)
en i\f, pues, sr·gún el teorema 1.4. las clni,·acbs p;nciZlles 2r;/2.Y; no pueden ser simultáneamente cero en nin,'j"Íll1 punto de cH.
Debemos hacer ver que (V g) ( p) •v = O para todo n·ctor tangente v
a "H en p. Observemos en primer lugar que si a es una cun·:: en },J entonces g(a) = g(rc¡, ac, aJ tiene el Yalor constante c. En consecuencia,
por la regla ele la cadena,
:¿
ag
dn:i
(a) ---=O.
dt
Tomemos a continuación a con la velocidad inicial
a'(O)
=V=
(v1,
Vz,
v3)
en a(O) = p. Entonces, -;e ycrifica que
' dr;¡
((r(O))
dt
(O)
"Q
= ...::.
(p) v; = (Vg) (p) •v =O.
3.9 EJEMPLO. Campos \-cctorialcs en la csfer;¡ 2: g
lema nos hace H'l' que
X = } V g = :¿X¡ l. i
= ~ x;" =
1
r-. El
es un campo vectorial nonn:1l ::S (figura 4.2tl). Esto es ¡·,·iclente desde
el punto ele vista geométrico, puesto que X ( p) = ~ /Ji C; ( p) es el wctor p
FUNCIONES DIFERENCIABLES Y VECTORES TANGENTES
175
¡cuyo punto de aplicación es p! De un comentario anterior se desprende
que Vp rs tangente a ~ si y sólo si el producto punto v 1¡pp = v·p es igual
a cero. De la misma manera, un campo vectorial V en :S: es campo vectorial tangente si y sólo si V•X = O. Por ejemplo, V(p) = (- jJ~, jh, O) define
un campo vectorial tangente en ~ que opunta "hacia d este" y se anula
en los polos nortc y sur (O, O, -+- r) .
Con\·icne que imistamos en que solamente
los campos vectoriales tangentes en A1 pertenecen al mismo cálculo de lv!, puesto que se deducen, en últin1a instancia, de las curvas que
también están en Af í definición 3.5). Desde
luego, rsto no es lo que succc!e con los campos
vectoriales normalc.;. Sin embargo, como veremos en el capítulo siguiente, los c;m1pos vectoriales normalrs resultan de gran u1 iliclacl al
Figuro 4.28
estucliar Af desde el punto de vista ele un observador situado en E".
Por último, vamos a adoptar la idea ele derivada direccional a una superficie. La clcfinici6n 3.1 del capítulo I se volc ele bs rectas en E 3 ; por esta
razón, vamos a empkor la formulación menos exigente que se basa cn el
lema 4.6 del capítulo I.
3.10 DJ:FINrcrÓN. Sea v un \Tctor tanr;-r·nü· :t Af en p, y sea f una
función en Af. cliferenciable y ele vZ~lorcs n:·Z~les. La derivada v[f] de f con
resjJecto a v l'S el valor común de (rl/dt) (fa) (O) para todas las curvZ~s o:
en Af que tienen la velocidad inicial v.
Las derivadas direccionales en una superficie tirnrn exactamente las
mismas propiedades de linealidad y ele Leibniz quc las del caso euclidiano
(teorema 3.3 del capítulo I).
EJERCICIOS
1. Sea x la carta geográfica de la esfera 2: (ejercicio 2.2.) Encuéntrese
la expresión en coordenadas f (x) de las funciones siguiente9 en ~:
a) f(p) = /h" + jJ/,
b) f(p'! = (f!t- f!e)" + jJJ 2 •
2. Sea x la parametrización del toro del t,jemplo 2.6.
a) Encuéntrense: las coorclenadas euclidianas ,cr 1 , a 2 , a:l ele la curva
a(t) = x(t, t).
b) Hágasc ver que a es periódica, y encuéntrese su período (véase
la pág. 31).
176
EL CÁLCULO EN LTNA SUPERFICIE
3. a 1 DPmuéstrese el corolario 3.4.
b) Drdúzcase la "regla de la cadena"
Cu
Yv = ;:.;··
oLJ
2V
+ ;.;-·
Xv
uZJ
Xu
donde se evalúan Xu y Xv en (u, ü) .
e) Dcdúzc1sr que Yu X Yr = Jx" X x,._, don ele
mapeo x- 1 y = (u, ü) : D ~ E 2 .
J
es el jacóbiano del
4. Sea x una carta dentro de Jo,f.
a) Si x,, es el mapa ck dcri\·aclas de x (1.7), verifíc¡urse que
clondc U,, U 2 es el campo natural de sistemas de referencia en E 2 .
b) Si f es una función diferenciable en A1, demuéstrese que
a
x,.[fl
Xu[f] =;;- (f(x))
a
= ---
Oc'
()/!
5. Demuéstrese que:
a) ves tangente a Al: z
., -
( ;', -
~~
~-
=
(f(x)).
f(x, y) en un punto p de .M sr y sólo sr
(, j'; 1' fJ :2 !. . ,1
L
+ -e/-
(JJ ] ' i" ) .,0 2•
J:_!
(,\
b\
SI x es una carta dentro de una superficie arbitraria Af, entonces
ves tangente a Af en x(u, v) si y sólo si
V'X 11
(u,v) X xv(u,v) =O.
6. Sean v y y las cartas en la esfera unitaria :S que se definen en el
1 por
disco unitario D: u 2 + v2
<
x(~
v) =(u, ~/(~v))
y( u, v)
(v, f(u, v), u)
donde f = y 1 - u 8 -- v 2 •
a) En un bosquejo ele 2:, indíqucnse las imágenes x(D) y y(D), y
la región en que se traslapan.
b) ,:En qué puntos ele D c:;tá cldinicla y 1 x? Encuéntrese la fórmula
de esta función.
e) ¿En qué puntos de D está definida x- 1 y? Encuéntrese la fórmula ele esta función.
7. Encuéntrese un campo vectorial normal en lid: z = xy que no se anule
y dos campos vectoriales tangentes que sean linealmente independientes en cada punto.
177
FUNCIONES DIFERENCIABLES Y VECTORES TANGENTES
8. Sea
e el
cono recto circular, parametrizado por
x(u,v) =v(cosu,scnu,1).
Si a es la curva a(t) = x('/'2t,c 1 ),
a) Exprésese a' en términos ele x" y Xv.
b) IIúgasc ver que, en cacb punto ele a, la \Tlocidael a' biseca el
ángulo que forman Xu y x,.. (Indicación: Verifíquese que a'•xuf
f,f X" !1 = a'•x,./¡1 Xv
,
duncJc Xu )" Xu oC cvzt!Úall en ( y2_t, c 1) .)
10
e) 1-Iúgasc un bosquejo el el cono e en el que se \"Ca la cun·a a.
1
9. Si z es un vector distinto de cero, nmmal a JI en p, ;;ca Tp(i1f) el
plano que pasa por p y es ortogonzll a z (véase la p[lg. 7 5) . Demuéstrese que:
a) Si cada vector tangente Vp a 1\f se reemplaza por su punta p + v,
entonces Tp(Af) se comicrte en Tp(i\f). (Por lo tanto, ip(M)
constituye una representación concreta ele Tp(Jf) en E 3 .)
,
b) Si x es una carta en i\1, entonces Tx(u.r) (1\J) consiste en todos los
puntos r en E 3 tales que (r- x(u, u) )•x,(u, z·) )/ x,(u, v) =O.
e) Si se da implícitamente ;11 como g = e, entonces iP ()\!) consiste
en todos los puntos r de E 3 tales que ( r - p)·(\7g) (p) =O.
1O. Encuéntrese, en cada caso, una ecuación ele la forma ax
+
by
+
cz = d corrcs;Jcmdiente al plano Tp(A1)
a) p = (0, O, O) y M es la esfera
l.
x"+y"+(z-1) 2
b) p
=
(1, -2, 3) y M es el elipsoide
xz
-+ ---yz-
4·
16
• z2 -
-¡- -
- -
H~
l.
e) p = x ( 2, ':7'/ 4), dondr: Al es el helicoide par:1metrizaelo por
x!u, u)
11.
...
=
(u cos v, u sen v, 2v).
(Contirwaciún del ejercicio 2).
a) Si m y n son enteros cuyo máximo común divisor es 1, hágase
ver que a ( t) = x ( mt, ni) es una curva cerrada simple en el toro
y encuéntrese su pcríoclo.i"
b) Si q es un número irracional, muéstrese que la curva a·: R-'> T
tal que a(t) = x(t, qt) es uno a uno.
Esta cun·;:¡, a c¡uc sc llama linea enroscada en el toro T, es
densa en T; es decir, dado cualquier número G > O, a dista menos ele G de todo punto ele T.
i" Es decir. h{~gasc \·er que a(t') :=__---: a(i) ~i y sólo .si t' ~ t es Jllli)tiplo del
período j1. En un sentido no r·slricto. esto significa que Lt tr;wcctmia de a se
[J:lrr-ce rn:ts al O que, por ejemplo, al 8.
178
EL CÁLCULO EN UNA SUPERFICIE
12. Un campo vectorial euclidiano Z = ~ z;U; en M es diferenciable
cuando lo son sus funciones coordenadas z 1 , Zc, z 3 (en "~1). Si V es
un campo vectorial tangente, hágase ver que
a) Para toda carta x: D -> Af, se puede expresar V como
V(x(u, v)) = f(u, v)xu(u, v)
+ g(u, v)xv(u, v)
b) V es cliferenciable si y sólo si las funciones
f
y g (en D) ,'ion di-
ferenciables.
En los ejercicios siguientes, se requieren algunos conocimientos de la
topología ele conj11ntos ele puntos. Se refieren a conjuntos abiertos en una
superficie 1H en E'l, es decir, conjuntos (/ [ en JI que contienen una vecindad dentro de i\1 ele cada uno ele sus puntos.
13. Demuéstrese que si y: E----:>1\1 es una carta propia, ento:1ecs y transforma conjuntos abiertos ele E en conjuntos abiertos de JI. Declúzcase
que si x: D----:> Jf es una carta arbitr;:cria, entonces la imagen x(D)
es un conjunto abierto en 1H. (Indicación: Para demostrar la segunda
afirmación, aplíquese el corolario 3.3.)
14. Demuéstrese que toda carta x: D----:> "H en una superficie i\1 en E 3
es propia. (Indicacic!n: Aplíquese el ejercicio 13. Obsc:nernos que
(x- 1 y) y-1 es continua y concuerda con x-1 en 1111 conjunto alJierto
de x(D) .)
15. Si Ql es subconjunto de una superficie i\1 en E'\ demuéstrese que Q{
es en sí mismo superficie en E" si y sólo si CU es conjunto abierto de .Af.
4
Formas diferenciales en una superficie
Hablamos en el capítulo I de las formas diferenciales en E' con el detalle
suficiente para entender las ecuaciones estructurales de Cartan (teorema
8.3 del capítulo II) y nada más. En las tres secciones siguientes, vamos a
dar un tratarnicnto bastante completo a las formas en una superficie.
Las formas son precisamente lo que necesitamos para describir la geometría de una superficie (capítulos VI y VII), pero ése es solamente uno
de los ejemplos de su utilidad. Las superficies y los espacios euclidianos
no son más que casos especiales de la idea general de variedad (sección 8).
Toda variedad tiene un cálculo diferencial e integral --que se expresa
en términos de formas- que generaliza el cálculo elemental de la recta
real al que estamos habituados. Por esta razón, las formas son funclament::des en la totalidad dr. las much:1s ramificaciones ele las matemáticas y
de sus :1plicaciunes que se b:1san en el cálculo. En el caso especial ele una
supcrficir, el cálculo de lao, form;¡s es bastante fúcil, y, sin embargo, proporciona un cuadro notablemcr:te preciso del caso nüs general ele todos.
.
FORMAS DIFERENCIALES EN
VNA
SUPERFICIE
179
Como teníamos en E 3 , una O-forma f en una superficie A1 es simplemente una función ( diferenciable) en 1\1 de valores reales, y una l-forma
4> en 111 es una función en los vectores tangentes z1 ;\1, ele valores reales,
que es lineal en cada punto (definición 5.1 del capítulo I). No dimos
la definición prcci:;a ele la:s 2-forma en el capítulo I, pero lo haremos en
seguida. Una 2-Iorma será una analogía bidimensional de una 1-forma: una
función de valores reales, definida no en \Tctorcs tangentes aisl~clos, sino
en pares ele vectores tangentes. (En este contexto, entenderemos siempre
por el término "pnr" c¡m: los \TCtores t:mgentes tienen el mismo punto
de aplicación.)
4.1 DEFINICIÓN. Una 2-forma ?] en una superficie JI es una función
ele valores reales, definida en todos los panes ordcnZldos de \-cctorcs tangentes v, w a 1\1 tal que
1) ?J(v, w) es lineal en v y en w
2) r¡ (V, W)
-?] ( W, VJ .
Puesto que una superficie es bidimensional, todas las p-f ormas en que
son cero, por definición. Graci:ts a esto, se sim;1Iifim consiclcrablcmcntc la teoría de las formas diferenciales en una superficie.
Al final de esta sección, haremos Ycr que nuestras nuc,·as definicinnes
son consecuentes con la exposición informal del capítulo I, sección 6.
Las formas se suman de la maner;:¡ ]¡;¡bitual, es decir, punto por punto;
solamente se suman las forma::: que tienen el mismo grado f! = O, 1, 2. Así
como cv;1luábZ1mos una l-form:1 ~~, en un CZlntpo \T::torial V, C\"~thwremos
aquí una 2-forma ?) en un par de CZ1mpos vcctori;,]cs, V, H', con el fin
de obtener una función ele valores reales ?] (V, TV) clcfinidZl en la superficie Af. Por supuesto, siempre supondremos que las formas con que trabajamos sol1 diferencia bies; es decir, que convierten campos vectoriales
( clifr~renciab!cs) en funciones difcrcuciablcs.
:\ckiértase que la regb de alternación ( 2) de la cldinición 4.1 implica que
jJ
>2
r¡(v,v) =O
para cualquier vector tangente v. Esta regla también nos enseiía que las
2-form;¡ se rebcionzm con los cletcrrninm1tcs.
4.2 LEMA. Sea r¡ una 2-forma en una superficie ltf, y sean v y w vectores tangentes (lineZllmente independientes) ten un punto de JI. Entonces,
]a
?]
(av -1- bw, cv -1- dw)
b
1
1
!e
dr
1
r¡lv w)
\
'
Demostración. Puesto que r¡ es lineal en su primera \·:trialJle, su valor
en el par ele vectores t;¡ngen1:cs av -1- bw, cv -1- dw es m¡
r v -:- dw) -1-
180
EL CÁLCULO EN UNA SUPERFICIE
b '7 ( w, cv + rlw) . ,\1 nplicar la linealicbcl de r¡ en su segunda variable,
obtenemos
ac17(v,v) + ad1¡(v,w) + bcr¡(w,v) + bdr¡(w,·w).
Entonces. la regla de alternación (2) nos da
r¡(av
+
bvr", cv
+
dw) = (ad- be) 17(v, v;).
1
Por lo tanto, los valores de una 2-for;na en todos los pares de vec.tores
tangentes en un punto quecbn con1pletamente determinados por su valor
en un par que sea linealmente indcpendiente. Aplicaremos este colllentario
con frecuencia en el trabajo posccrior.
En todos sus contextos, bs fonnas diferenciales cumplen con algunas
propiedades generales, que cstz:blecimcs (por lo menos, en p~utc) en el
c:apítulo I, con rc·spccto a bs formas en E-3 . Para empezar, dirernos que
el producto tilde de vna jJ-forma y una q-forma es siempre una (p +
r¡) -forma. Si jJ o si q Y:llcn cero, el producto tilde se convierte simplemente en la multiplirrJción habitual por un:1 función. En una superficie,
el producto tilde es siempre cero si f' + q > 2. Por lo tanto, necesitaremos
la definición sobmente del caso p = q = 1.
4.3 DEFINICIÓ;'\!. Si cp y '1 son 1-formas en una superficie A1, el producto tilde <p 1\ ¡f¡ es la 2-forrna en A1 tal que
(cp
1\ V~)
(v, w)
=
cj>(v) ¡f;(w) - cf>(w) IL'(v)
para todos los pan:s v, w ele vectores tangentes a 111.
Hay que alh·ertir que ~) 1\ y es realmente una 2-forrn:l en JI, puesto
que es una función c:e y;:dores reales definida en todos los pares de vectores
tangentes, y satisface las condiciones de b definición 4·.1. El producto
tilde tiene todas las propicclacles algebraicas a que estarnos acostumbrados,
con la excepción de la. conmut:1 tividacl; en general, si ~ es una p-forma y
si YJ
o."S
una q-forma, entonces
~ 1\ 1)
En una superficie, el único signo de menos ocurre en b multiplicación
de 1-forma, donde, como en el capítulo I, tenernos que 4> 1\ y = -y· 1\ cj>.
El cálculo diferencial de las formas se Lasa en la derivada ext.erior d.
En una O-forma (función) f en una superficie, la derivada exterior será,
corno era <mtcs, b ]-forma df tal que df(v) = v[tJ. Siempre que aparecen
las formas, la dnivacla exterior de una jJ-forma es una (p + 1) -forma.
Por lo l:cnto, en ,,u¡wrficies, solamente ncr. sitamns hacer una definición
nuev:1: la ele derivada exterior dy'' de una 1-forma cp.
Sea cp una ]-forma en una superficie Jf. Entonces
la deri1•ada exterior dq, de q, es la 2-forma tal que, en cualquier carta x
dentro ele 111, se Yerifica que
4.4
DEFINICIÓN.
181
FORMAS DIFERENCIALES EN UNA SUPERFICIE
a
2
dq,(x",x) = a-;:;(cf>(x_))- ;;;U,(xu)).
Hasta aquí, esta definición no es aún \~J.Jida; hay un problema de consistencia. En realidad, hemos definido una forn1a d _\..•¡>. en la imagen de cada
carta x en Af. De manera que lo que debcllJOS demostrar es que en la región en que dos cart<1s se tr<lsbpan, las form;¡s d x•'• wn iguaks. Sólo entonces
podemos decir que hemos obtcniclo de </> una f.ola forma de/> en "~!.
4.5 LE?.IA. Sea q> una 1-forma en JI. Si x y y son cart:1s dentro de Af,
entonces d"'' = d 1 ó en el tra:dapamicnto de x(D) y y(E).
Demostración. Puesto que Ya y y,~ son linealmente indcpcnclientcs en
cada punto, resulta suficiente, según el lema 'l.2, exhibir que
(dy1>) (Yu,Yv) = (d,j>) (Yu,Yv)·
Ahora bien, escribiremos, como lo hicimos en el corolario 3:+, y =
x (u, ZJ), y, como en un ejercicio anterior, cleclucirenJos por la regla de la
cadena que
C!ü
cü X
- Xu -J.Vu =au
GU \
( 1)
Cii
Yr ="
Xu
Ui}
+
2.::
--X
Ov "'
donde Xu y Xv se evalúan, ele aquí en adelante, en ( ú, v). Entonces, al
tomar en cuenta el lema 4.2,
(2)
donde J es el jacobiano (2u jo u.) ¡ (- (( lt ¡ 2,. \ (ZZ:i!u). Por lo t;lllto,
a partir de la definición 4.4, se ve con claridad que, para demof'trar la.
igu:dclad (d yT<b) (v
.y· ) = (d xY-.~)(y·
,Y) todo lo que necesitamos es la ccu;:¡.; 11' f
· N "' 1" '
ción
l
a (</>Yv)
. - -a (cf>Yu)
. __- ] {a::;-~ (q>x,.)
. - _,a:::: (q>Xu)j.
::;Oll
07J
Cil
CU
(3)
Es suficiente que operemos en (u /e u) (oyv), pues si intcrcan:biamos
simplemente: u y u tendremos entonces (ujc,) (1>Yu). Puc;,to que (3) nos
pide que substraigamos estas dos derivadas, podemos descartar cualesquiera
términos que se cancelen cuando se intercambian u y i' en cualquier parte.
Si aplicamos q> a la segunda ecuación de ( 1), obtendremos
cf>(y ) = cp(xu)
\
'Dil
Oi:
cv- + rp(x \.) ;:::-·
()1'
En consecucnoa, por la regla ele la cadena,
2
-j- ;.,Cll
¡'('
(q.JX .)
\
+ ...
(4)
182
EL CÁLCULO EN UNA SUPERFICIE
donde, en concordancia con el comentario anterior, hemos descartado dos
términos simétricos. A continuación, aplicamos la regla de la cadena -y
el mismo comentario-- para obtener
~~- (<PYv)
ou
=
(!- (<Pxu) oü + .. ·)2U. +(~o
ou
cu
ou
ou
(<f>xv)
oú + .. ·)~
ou
ou·
(5)
A continuación, intercámbiense u y v en ( 5) (y también u -y ü) y
substráigase de la misma expresión ( 5) . El resultado es precisamente la
ecuación ( 3) .
1
Resulta difícil exagerar la importancia de la derivada exterior. Ya
vimos en el capítulo I que viene a generalizar la idea ele la diferencial
de una función -con la cual estamos familiarizados-- y que contiene las
tres operaciones fundamentales de derivadas del análisis vectorial clásico
(ejercicio 8 de la sección 6 del capítulo I). El papel que desempeíla en las
ecuaciones estructurales de Cartan -que se dedujeron en el capítulo I I es esencial (teorema 8.3). Tal vez el enunciado más claro de su significado
sea el del teorema de Stokes (6.5), que en realidad podría usarse para
definir la drri\·ada exterior de una 1-forma.
En una superficie, la derivada exterior de un producto tilde exhibe las
mismas propiedades de linealidad y de Leibniz (teorema 6.4 del capítulo I) que tiene en E 3 ; véase el ejercicio 3. En los cálculos prácticos, estas
propiedades pueden resultar más eficientes que acudir directamente a la
definición; compárese con la explicación del caso euclidiano que se dio
en la página 36. Más adelante, en los ejercicios, pondremos más ejemplos
de esta técnica.
La propiedad más notable que tiene esta idea de derivada es que no
existen las segundas derivadas exteriores: siempre que se trata ele formas,
la aplicación doble de la derivada exterior resulta ser cero. En una
superficie, bastará con que lo demostremos para las O-formas, pues, aun
en el caso de una 1-forma rp, b segunda dcri\·ac!a d ( dq,) es una 3-forrna
y vale automáticmJCnte erro: en consecuencia:
4.6 TEORL:~>L\. Si f es una función ( dif erenciablc) en Jf ele valores
reales, entonces d ( df) = O.
Demostración. Sea .y = df, de manera que debemos verificar que
d¡f¡ = O. De acuerdo con el lema 4.2, será suficiente demostrar que, en
cualquier carta x dentro ele M, tenemos que ( d¡f¡) (X u, Xv) = O. Si aplicamos el ejercicio -l ele la sección 3, obtt:'nemos
o
v(xu) = df(xn) = x,[f] = ;:;-(fx)
Oll
y. ele la misma manera,
2
::::- (fx).
ov
D~FERENCIALES
FORMAS
EN UNA SUPERFICIE
133
En consccuencw,
ov
(.px ) = (J2(fx) - az(fx) =O
u
ou ov
ov ou
1
Hay muchos cálculos y demostraciones que se reducen al problema de
verificar que dos formas son iguales. Como ya hemos visto, para ello no
es necesario comprobar que las formas tienen el mismo valor. en todos
los vectores tangcntes. En particular, si x es una carta de coordenadas,
entonces
1) en las 1-forma en x(D): <{> = ¡f si y sólo si <{>(xu) = .p(xu) y
<{>(xt.) = ¡f¡(xv);
2) en las 2-forma en x(D):
fL
= v si y sólo si ft(x",x,.) = v(xu,xv)•
(Para demostrar estos criterios de igualdad, expresamos vectores tangentes
arbitrarios como combinaciones lineales de x,. y xv.) Con más generalidad,
diremos que Xu y Xv se pueden reemplazar por dos campos vectoriales
cualesquiera que sean, en cada punto, linealmente independientes.
Verificaremos en seguida que los resultados formalmente rigurosos que
hemos demostrado en esta sección tienen consistenci:1. con las reglas de
operación que emmci::tmos en la sección 6 del capítulo I.
4.7 EJEiiiPLO. Las fonnas clifercnci::tles en el pbno E". Sean u 1 = u
y u 2 = v las funciones coorclenacl::1s natur::1lcs, y U,, U 2 el campo n::1tur::1l
de sistcm::1s de referencia en E". El cálculo diferenci::1l de bs formas en
E" se expresa en términos de u 1 y u 2 de la m::1nera siguiente:
Si f es una función <{>, una 1-forma y r¡ una 2-forma, entonces
1) <{> = f1du1
+
donelef¡ = cp(U¡).
fcduc,
2) r¡ = g du 1 duc,
donde g = r¡ ( U1, U e).
3) para ¡f = g 1 du 1
+ g 2 du"
y la rp ele antes,
cp 11. tf; = (f1g 2
'1) df
5) drp
=
=
,
uu 1
du 1
{eg¡) du1 du 2 •
cf du •
+ ;_.,--2
uu 2
(Ofz_- ~~ 1 ) du
OU1
-
1
du 2
( rp es la ele antes) .
Ollc
Para la demostración de est::1s fórmulas, véase el ejercicio '1.
Es posible cst::1blcccr definiciones y expresiones en coorclenael::1s parecid::1s
en cualquier esp::1cio euclidi::mo. En el c::1so de L1 recta real E\ el campo
natural ele sistemas de referencia (definición 2Ac del capítulo I) se reduce
al campo vectorial unitario aislado U 1 , en el que U 1[f] = df / dt. Todas las
p-form::1s en que p > 1 son cero, y s1 rp es una 1-forma, entonces rp =
rp(Ul) dt.
184
LL CÁLCULO EN UNA SUPERFICIE
En los ejercicios irán apareciendo algunos ejemplos de formas; sin
embargo, tendremos que trabajar naturalmente con muchas más en los
capítulos VI y VII, donde sus propiedades tienen un sentido geométrico
directo.
EJERCICIOS
rp y ,¡; son 1-forma en una superficie, demuéstrese que cp
- if¡ A rf>. Dedúzcase de ello que rf> A rf> ~ O.
1. Si
/1.
,¡;
=
~) con la propiedad ele que dq, = O es cerrada.
Una forma 1' tal que q> = r/,~ --donde ~ es una forma- es exacta.
(De esta m;:mera, si e¡, es una jJ- forma, $ scrú necesariamente una
(j! - 1) -forma.) Demuéstrese que
a) Toda forma exacta es cerrada.
b) l'\o hay ninguna O-forma que sra exacta, y, en una superficie,
toda 2-forma es cerrada.
e) Las funciones constantes son O-forma cerradas.
2. Se dice que una forma
3. Demuéstrense las fórmulas de Leibniz
d ([1>) = df A cp
d(fg) =dfg+fdg
+
f drf>
donde f y g son funciones en lvf y rf> es una 1-forma. (Indicación:
Por definición, (fcp) (vi') = f (p) q> ( v¡¡) ; en consecuencia, al evaluar
fr/> en Xu, se obtiene f(x)cp(xu) .)
4. a) Demuéstrense las fórmulas ( 1) y ( 2) del ejemplo 4. 7 por medio del
comentario anterior al ejemplo 4.7. (Indicacir!n: IfCtgase ver que
(du 1 du 2 ) (U 1 , U") =l.)
b) Dedúzcanse las fórmulas restantes por mrclio ele las propiedades
ele d y del producto tilde.
5. Si f es una función en una suprrficic de valores reales, y sr g es una
función en la recta real, demuéstrese qne
Dedúzcase que
d(g(f))
=
g'(f) df.
6. Si f, g y h son funciones de una superficie 1\1, y si cp es una 1-forma,
demuéstrese que:
a) rl(fgh) = gh df + fh dg + fg dh,
b) d(rpf) =fds',-1,Adf
(q,f=fcp),
e) (df A dg) (v, w) = v[flw[g]- v[g]w[fJ.
7. Supongamos que "H quede cubierta por los conjuntos abiertos CU 1 ,
y que se haya definido una función en cada r¡ [;, denotada
185
Mc\PEOS DE SUPERFICIES
por fi, con la propiedad de que fi - fi sea constante en el traslapamiento de Q[i y Q[j. Hágase \"Cr que hay una 1-forma <? en M tal
que cp = dfi en cada Q{¡. Generalícese esto al caso de 1-formas </>i
tales que epi - <Pi es cerrada.
8. Sea y: E---¿ A1 un mapco arbitrario que va de un conjunto abierto
ele E 2 a una superficie ,H. Si <? t'S una 1-forrna en ,\1, húgase ver
que la fórmula
o
o
\
dcb(y·
y)--(cbv)
---(d,v
J
'
1l, "
Qz¡
v
Oz· i "' u
l
.,
sigue siendo válida aun cuando y no es regular ni tampoco uno a uno.
(Indicación: En la demostración del lema 4.~J, verifíquese que la
ecuación ( 3) conserva, en este caso, su \"alidez.)
Una carta x dentro de lvf establece una
uno entre un conjunto abierto D de E 2 y un
de A1. Aunque nosotros hemos insistido en la
también tiene sus ventajas el énfasis en la
correspondencia uno a
con junto abierto x ( D)
función x: D---¿ x(D),
función inversa x- 1 :
x(D) ---¿D.
u v
9. Si x: D -'> A1 es una carta dentro de lvf, sean
y
las funciones
coorden;:¡cJas ele x-r, ele mZ!nera que x- 1 (p) = ( íl (p), v(p)) par;:¡
todo p en x (])) . Hág;:¡se \Tr que
a) íl y v son funciones cliferenciabks en x ( D) tales que
ií(x(u,v)) =u,
0(x(u,v)) = v.
Estas funciones constituyen el sistema de coordenadas ;:¡sociado
con x.
b) dü(x,) = 1
díl(x,) =O
dií (xu) = O
dií (x,.) = l.
e) Si <? es una 1-forma y si r¡ es una 2-formZl, entonces
e¡,= f díl + g dií
donde f(x) = q>(x,), f(x) = <f>(xr)
r¡ = hdu dv
donde h(x) = r¡(x,,xv)·
(Indicación: En (b), aplíquese el ejercicio 4(b) de IV.3.)
u, v
1O. Identifíquese (o descríbasc) el sistema de coordenadas asociado
de
a) La carta pobr de coordenadas x (u, v) = (u cos v, u sen .v), definida en D: u > O, O < v < 2...
b) LZ! carta identidad x(u, v) = (u, v) en E 2 •
e) La cartZ! geográfica x en la esfera.
5
Mapeos de superficies
Para definir la difcrenciabilidad de una función que va desde una superficie hacia una superficie, nm ajustaremos al mismo plan general de la
186
EL CÁLCULO EN UNA SUPERFICIE
-
F
Figuro 4.29
sección 3 y requeriremos que todas sus expresiones en coordenadas sean
diferenciables.
5.1 DEFINICIÓN. Se dice que una función F: A1 ~N que va de una
superficie a otra es diferenciable cuando, para cada carta x dentro de A1
y y dentro de N, la función compuesta y- 1Fx es euclidianamente diferenciable (y está definida en un conjunto abierto de E 2 ) . Entonces, F se llama
mapeo de superficies.
Se ve evidentemente que la función y- 1 Fx está definida en todos los
puntos (u, v) de D tales que F (x (u, v) ) está en la imagen ele y (figura
4.29). Como teníamos en la sección 3, deduciremos del corolario 3.3 que, al
aplicar esta definición, es suficiente que comprobemos una cantidad suficiente ele cartas para cubrir tanto a A1 como a N.
P
Figura 4.30
5.2 Ep:J\IPLO. 1). Sea 2; la esfera unitaria en
E" (con centro en O), y retiremos de ella los polos
norte )' sur; sea C el cilindro que se eleva sobre
la circunferencia unitaria del plano xy. Por tanto,
C está en contacto con la esfera en el ecuador de
ésta. Definiremos un rnapeo F: ::S-> e de la manera siguiente: si p es punto de ::S, trácese ortogonalmente la recta que parte del eje de las z
y pasa por p, y sea F (p) el punto en el que esta
recta corta por primera vez a e, comQ se ve
en la figura 4.30. Para demostrar que F es un
mapco, emplearemos la carta geográfica x en ::S
(fjcmplo 2.2), )',en e, la G1rta y(u,v) = (cosu,
sen u. v) . Ahora bien,
x(u,v) = (cosvcosu,cosvscnu,senv),
de manera que, a partir ele la definición ele F, obtenemos
F(x(u, v))
=
(cos u, sen u, sen v).
187
!\:APEOS DE SUPERFICIES
Pero este punto de C es y( u, sen v) ; en consecuencia,
F(x(u, v))
=
y(u, sen v).
Si aplicamos y- 1 a ambos miembros de la ecuación, encontramos que
(y-1 Fx) (u, v) = (u, sen v)
de donde se desprende que y- 1 Fx es, desde luego, diferenciablc. (En realidad, x no cubre por completo a 2:, pero la semicircunferencia que falta
puede ser cubierta por medio de una carta como x.) Concluimos que
F es un mapeo.
2) La proyección estereográfica de la esfera agujerada 2: sobre el
plano. Sea 2: una esfera unitaria que descanse en el plano xy en el origen,
de manera que su c~ntro se ubica en (0, O, 1). Eliminemos de 2: el polo
norte n = (0, 2, 2). Imaginemos a continuación que tenemos en el polo norte una fuente luminosa: sea, para cada punto p de ~' P (p) la sombra
de p en el plano xy (figura 4.31). Como es habitual, identificaremos el
plano xy con E2 por medio de (p 1 , p2 , O) ~ (p 1 , h). Por tanto, hemos
definido una función P que va de 2: sobre E 2 . Es evidente que P tiene
la forma
donde r y R son las distancias respectivas de p y P(p) al eJe ele las z.
Pero, al observar la semejanz;:¡_ de los triángulos ele la figura 4.32, vemos
que R/2 = r/(2 -p 3 ) ; en consecuencia,
Ahora bien, s1 x es cualquier carta en ::S, la función compuesta Px
es eucliclianamente diferenciable, de manera que P: ::S ---7 E 2 es un mapeo.
Así como sucedía con los mapeos del espacio euclidiano, tenemos aquí
un m:1pa de derivadas para cada mapeo de superficies.
5.3 DEFINICIÓN. Sea F: Al ---7 N un mapeo ele superficies. El mapa de
derivadas F* de F asigna a cada vector tangente v a }.1 el vector t~ngente
Figura 4.31
Figura 4.32
188
EL CÁLCULO EN UNA SUPERFICIE
-V
F
Figura 4.33
F.,.(vl a N tal que: Si v es la velocidad inici:-~1 de una cmTa a en 1\1,
entonces F.,.(v) es la wlocidad inicial ele b cmTa nnagen F((t) en N
(figura 4.33) .
Además, en cada punto p, el milpa de derivada:; F.,. es l!Yl:l transformación lineal que va del plano tangente T¡¡(kf) al plano tangentc Tr(p) (N)
(véasc el ejercicio 13). De la definición se desprende inmediatamente que
F.,. conserva las velocidades ele las curvas: Si a = F (a) es la imagen en N
de una curva a en M, entonces F.,.(a') = a'. Como teníamos en el caso
euclidiano, deducimos de esto la propiedad conveniente de que el mapa
de derivadas de una composición es la composición de los mapas de· derivadas (ejercicio 14) .
El mapa de derivadas de un mapeo F: 1H ~N se puede calcular en
términos de velociclades parciales de la manera siguiente. Si x: D ~.M
es una p:-~rametrización en 1\1, sea y el mapco compuesto F ( x) : D ~N
(que no necesita ser paramctrización). Es obvio que F transforma las curvas
parámetro ele x en las curvas parámetro correspondientes de y. Puesto
que F,. consr:n·a las \Tlocidacles de las curvas, se concluye rápidamente que
Puesto que Xu y xv forman una base del espacio tangente de Af en cada
punto ele x (D), est::ls fórmulas fáciles ele calcular determinan completamente a F., ..
La explicación acerca de los mapeos regulares de la sección 7 del capítulo I se trad11ce con facilidad al caso del mapeo ele superficies F: A!~ N.
F será regular siempre que todos sus mapas de derivadas F.:•p: Tp (Al) ~
Figura 4.34
189
MAPE()S DE SUPERFICIES
TF(pl (N) sean uno a uno. Puesto c¡ue estos plauos tangentes tienen la misma
dimensión, sabemos por el álgebra lineal que el requisito de inycctiviclad
(uno a uno) equivale a que F,. sea un ison:orfismo lineal. Un mapco
F: ji-'-> N que tenga mapco inwrso F- 1 : N.....¿ :,I se llama di[ eomorfismo.
Podemos imaginar qt:c un difcomorfismo F va clistcrsionando suavemente
JI hasta producir N. Si aplicamos la formulación euclidiana del teorema
de b función im·ersa a un:t expresión en coordcnz,das y-1 Fx de F, podemos deducir rsta extensión c1el teorcrrn ele la función inver."a ( 7.1 O del
capítulo I).
5.4 TLORE::\IA. Sea F: A! -3> N un mapco de superficies, y supongamos
que F,.P: T¡¡(AI)-'-> TPirl (N) sea un isomorfismo lineal en algún punto p
de lvf. Entonces existe una vecindad Q[ ele p en JI tal que la restricción ele
F a Q [ es un difeomorfismo que va sobre una vecindad Q) de F (p) en N
(figura 4.34).
Corno consecuencia iJ:mediata tenrmos que un ma1J:Jeo F de A1 sobre
N, regular y uno a uno, es difeomorfismo. Podemos decir esto porque,
como F es uno a uno y es sobre, tiene una función inversa única F·I, y
F- 1 es mapeo ( difercnciable), puesto que, en cada \Tcindad Q) -como
dijimos antes--, coincide con el inverso del difeomorfismo Q[-'-> Q/.
5.5 EJEMPLO. La proyección estcreogrúlica J':
morfismo.
~o-'->
E" es un difco-
Se Ye claramente a partir del cj~mplo 5.2, que 1' es un rnapeo uno
a uno que va ele la e,fcra agujerada ~o al plano E~. Por lo tanto, sólo nos
falta hacer ver que P.,. es UllO a uno en cada punto. Si hclCCmos una pequeíla
modificación a la c::~rta geográfica del ejemplo 2.2, obtenemos la pararnetrización
x(u, v)
=
(cos v cos u, cos z• sen u, 1 +'en v)
de la totalidad ele ::So con la excepción del polo sur, que está en el origen O.
Ahora bien, la definición geométrica nos dice que 1' transforma las
curvas u-pararnétricas de x (las circunferencias de latitud) en circunferencias del plano, con centro en el origen, y que 1' transforma las· curvas
v-paramétricas (los meridianns de longitud) en rectas que parten del
origen, Como SC ve en la figura cj.. 3'J.
En efecto, ambas familias de cun·as imagen son simplemente las curvas
paramétricas ele y = P (x), y, al tomar en cuenta la fórmula ele P en el
ejemplo .3.2, vrmos que
y(u,v) = J'(x(u,v))
190
EL CÁLCULO EN UNA SUPERFICIE
x.
..
y
Figura 4.35
Puesto que P*(xn) = Yu, P,(xv) = Yv, se demuestra la regularidad de P*
al calcular Yn y y,._, que result~~n ser ortogonales y clifcrcnks ele cero, y en
consecuencia, linealmente independientes. (En el polo sur, O, se necesita
una demostración diferente, puesto que x no es pararnetrización allí ( Yéasc
el ejercicio Li) .) En conclw;ión, tenernos que P es clifeomorfismo.
Las formas diferenciale-s tienen la notable propiedad ele que se les
puede llevar de una superficie a otra por medio ele un mapeo arbitrario.t
Vamos a experimentar con una O-forma, es decir, con una función ele
Yalores reales, f. Si F: 1H -'>N es un mapeo de superficies y f es una función en Af, vemos que simplemente carecemos ele una marwra que sea
plausible y general de llevarnos a f hacia una función en N. Pero si, en
lugar de ello, f es una función en N, d problema es fácil: hacemos regresar a fa la función compuesta f(F). en "'Avf. La retroacción corn:sponcliente
en 1-formas y en 2-forn1as se lleva a cabo de la manera siguiente.
5.6
DEFINICIÓN.
Sea F: Af--¿ N un mapeo de superficies.
1) Si </> es una 1-forma en N, sea P:'c/> la 1-forma en A/ tal que
(F*q,) (v) = cp(F,v)
par:1 todos los vectores tangentes v a }.[.
2) Si T) es una 2-forma en N, sea F''T) la 2-fonna en A/ tal que
(F"TJ) (v, w) = r¡(F,.v, F,w)
para todos los pares de vectores tangentes v, w en A1 (figura 4-.36).
Cu:1nclo estudiemos una función
f
como O-forma, escribiremos. a veces
F''f en lugar de f(F), de acuerdo con la notación de la retroacción de
1-formas y de 2-form:J.s.
Las operaciones esenciales de las formas son la suma, el producto tilde
y la derivada exterior; todas ellas se ven conserYaclas por los mapcos.
5.7 TEOREMA. Sea F: J [--¿N un m<lpeo de superficies, Y sean
formas en N. Entonces
t
No "tcecle lo mismo con los campos vectoriales.
~
y r¡
191
MAPEOS DE SUPERFICIES
Figura 4.36
1) F*(~ + r¡) =
2) F' (~A 17) =
F~
+ F''r¡,
F''~ 1\ F''r¡,
3) F''(d~) = d(F'~).
Demostración. En ( 1), tanto ~ como r¡ se consiclcr;m j1-fmm:1s (grado
O, L ~) \. la demostración se reclucf' a rutina:; de cúlculo. En ( ~), se
debe dejar que ~ v r¡ tengan grados diferentes. Cu::-tnclo, por ejemplo, ~
es una función f, b fórmula dice simplemente F*(h) = f(F)F"(r¡). En
cualquicr::-t ck los casos, (2) se demuestra por medio de cálculos directos,
t::-tmbién. Pero el inciso (3) es más intcrcsante. 1 Icmos 1mcqo d ca·;o mús
fácil, cu<tnclo ~ es función, corno ejercicio (ejercicio 8), y v::-tmos ::1 estudim
aquí d caso difícil, que se tiene cuando ~ es un::-t 1-forma.
f'
=
Serú suficiente con que exhib;m10s, para cada carta x: D
validez de
~M,
la
Sea y= F(x), y recordemos que F.,.(xu) =Y u y que F.,.(xv) = Yv· Por lo
tanto, al emplear las definiciones de d y de F", obtenemos
d(F'~)
(xu, x,)
=
;:,a__ {
Oll
=
=
(F''~)
(x,)} - ;;2_ { (F'~) (x,)}
CV
)l_ {HF:xv)}
()U
_a__
uu
(~(y,))
-
- ]- {HF:xu)}
cV
_u_ (~(Yu)) ·
uv
Aunque y no sea una carta, en el ejercicio 8 de la sección 4 se dem.uestra
que esta última expresión sigue siendo igual a rlHYu, Yv). Pero
d~(Yu, Yv)
=
d~(F*x"'
F.x,) = (F'(d~)) (x,0 Xt·).
Por consiguiente, concluimos que d (F"~) y F" ( d~) tienen el mi:;mo valor
1
Las elegantes fórmulas del teorema 5.7 constituyen la clave de la profundización del estudio de los mapeos. En el capítulo VI, las aplic::-tremos
192
EL CÁLCULO EN UNA SUPERFICIE
a las formas ele conexión ele los campos ele sistemas ele referencia con el
fin de obtener información fundamental acerca de la geometría de los
mapeos de superficies.
EJERCICIOS
1. Sean 111 y N superficies en
E·1 • Si F: E-' ---o' E' es un lllZ1peo tal c¡ue
la imagen F (l1f) ele 1\f es tú contenida en X, entonces b rl:'slricción
de F a 1\1 es una función F l1\f: ,U~ S. lkmuéstrese que F 1 JI es
mapeo de superficies. (Indicación: Aplíquese el tcorem;c 3.2.1
2. Sea .:S la esfera de radio r con centro en el origl'll ele E 3 • Dcscríbzmse
los efectos de lo!' mapeos siguientes F: Z ~.:S en los meridianos y los
paralelos de .:S.
a) F(p) =-p.
b) F(jJ¡,fh,P:1 ) = (J':;,p¡,Jic)·
e ) F, ( p¡,
Pe, p3 ) -_
(/J1
+ f!e., -·72
/J1 - j)z. , - fJ,. ) •
V2
3. Sea ,\f una superficie simple, es decir, que AI es imagen de una sola
carta propia x: D ~ E 3 • Si y: D ~N es cualquier mapeo en una
superficie N, demuéstrese que la función F: "U~ N tal que
F(x(u,v)) = y(u,v)
para todo (u, v) en D
es un mapco de superficies. (Indicación: Póngase F = yx- 1 y aplíquese
el corolario 3.3.)
4. Aplíquese el resultado del ejercCJo 3 a la construcción ele 1m mapco
del helicoide JI (ejercicio 7, IV.2) sobre el toro T (ejemplo 2.6)
tal que los rayos de JI se transformen en meridianos de 'T.
!! p 11 = r, la función A: :'S~~ tal que "1 (p) = -p
se llama mapeo antÍjJOda de :'S. DPmuéstresc que A es un difeornorfismo y que A ( v1,) = ( - v) -p·
5. Si::; es la Psfcra
6. Sea x: D ~ lvf una carta de coordcncdas dentro Je una superficie
},J. Con respecto a cualquier forma tj; en M, la forma x''' ( .¡1) en D
se llama exjnesión en coordenadas ele tj;. (Cuando tj; es una O-forma,
es decir, una función, entonces x*(tf;) = tj;(x), de manera que esta
terminología tiene consistencia con la de IV.3.)
Si g> es m>a 1-formZI y v una 2-formZ~, demuéstrese que
a) x''(q>) = ~1,(xn)du + g>(x,.)rh•.
b) x(F) = v(xu,xv)dudv.
e) x*(dq>) = (;.,3__ (1> x,.) - .}'.·
Oll
', 1'
(~', xu)) du (h·.
(.En la práctica, en lugar ele substituir lo corrcspondicutc en la
fórmula (e), suele ser mas fácil aplicar la derivada exterior a
la fórmula (a).
MAPEOS DE SUPERFICIES
7.
193
(Continuación). Sea x la carta geográfica en la esfera 2;.
a) Si </> es una 1-forma en 2: con la propiedad de que <J>(vp) =
p1u2- p 2u1, hágase ver que <J>(x,) = T2 cos 2 v y que q>(Xv) =O.
A continuación, encuéntrense las expresiones en coordenadas de
</> y
d<J>.
b) Demuéstrese que a partir de la fórmula v(vp. wp) = P~(v 1 w 2 v2w 1) se define una 2-forma en :S, y encuéntrese su e•;presión en
coordenadas.
8. Sea F: Jv[ ~JI.." un mapeo, y sea g una función de N.
a) Demuéstrese que F conserva las clerivacbs direccionales en este
sentido: si ves vector tangente a M, entonces v[g(F)J = (F,v)[g].
b) Dedúzcase que F*(dg) = d(F*(g)).
9. Si x: D ~ A1 es una p::uametrización, demuéstrese que b restricción
de x a una vecindad suficientemente pequeña de un punto ( u 0 , u0 ) de
D es una carta dentro de A1. (Por lo tanto, se puede partir en cartas
una parametrización.)
1O. Si G: P---'> Jf es un m:1pco nc>gubr sobre Af, y si H: P---'> N es un
rnapeo :1rbitrario, entonces la fórmula F(G(p)) = !-l(p) es consistnztc si se tiene que G(p) = G(q) imp:ic:1 H(p) = Il(q) p:1r:1 todos
los p, q en P. Dcmuéstre<c que, en c:;te caso, F es Wl mapco ( diferenciable) bien definido.
Aplicaremos frecuentemente este resultado al caso en que G es paramcrriz::lción ele )\1.
11. Sea x: E 2 ---'> T la parametrización del toro que se dio en el eJemplo 2.6. En cada uno de los casos que d:1remos a continuación, clemué:;trcse que la fórmula
F(x(~
v)) = x(f(u,u),g(u, u))
es romistentc ( ejr:rcicio 10), y descríhanse los mapeos que resulten, a
salPr. F: T ->T. !Por ejemplo, háblese de su efecto en los meridianos y ¡nralclos de T.)
a) / ~~ 3u,['. = Z'.
b) j = 1l + "' g = u + 2-:;-.
el f = u, g = u.
d) f = 'U + V, g = U - L'.
De estos mapeos, ¿cuáles son difeomorfismos?
194
EL CÁLCULO EN UNA SUPERFICIE
12. Sea F: 111 ~N un mapeo. Sea x carta dentro de 1\f y sea y= F(x)
(Adviértase que y descansa en N, aunque no es necesariamente una
carta.) Si
es una curva en
velocidad
,
.~i,
demuéstrese que la imagen
rla 1
a=
F (a) en N tiene
da.,
a= Jt y"(a1,ae) + --;¡tYv(al,ae).
13. Del eJerciciO 12, dedúzcase:
a) La propiedad de im·arianeia que se necesita para justificar la
definición ( 5.3) ele F, ..
b) El hecho de que los mapas de derivadas F*: T 1,(JI) -::.TP(pJ(N)
son transformaciones lineales.
F'
G
14. Dados los mapeos Af-~ lv, A---'> P, sea GF: j\f-::. P b función
compuesta Hágase ver que
a) GF es un mapeo,
b) ( GFh = G.F*,
e) ( GF) * = F'G'", es
decir, que para cualquier forma~ en N, F''(G*~) = (GF)*(~). (Nótese la inversión de factores en ( GF) *; las formas van en la dirección
opuesta desde los puntos y los vectores tangentes.)
7'
_.,
15. En la proyección estereográfica P: ::::o ~E", demuéstrese que el mapa
ele deri\·adas en el origen O, es esencialmente un simple mapeo identidad. (Indicación: Exprésese P en las cercanías de O en términos de
una carta de J'vionge.)
16. a) Demuéstrese que el mapeo m verso de una proyeccwn estereográfica P: :So~ E 2 se determina por la fórmula
p-l(u v)
=
(4u,4u,~fl
f+4 '
donde f = u 2 + v 2 • (Hágase ver que tanto PP-1 como P- 1 P son
mapeos identidad.)
b) Declúzcase que la totalidad ele la esfera :S puede quedar cubierta
por solamente el os cartas. (El esquema ele IV.l requiere seis.)
'
6
Integración de formas
Las formas diferenciales desempcíian un papel más en el cálculo, que
probablemente haya notado el lector cuando hablarnos de ellas por vez
primera en el capítulo I. Concretamente, en una doble integral Jf f (u, v)
du dv, lo que aparece después de los signos de integración es una 2-forma
en E 2 • En cierto sentido, sólo en el espacio cuclicliano sucede la integración
real de las formas. Pero es fúcil extender esta idea de integración a formas
195
INTEGRACIÓN DE FORMAS
en una superficie arbitraria, mediante su retroacción al espacw euclidiano
para integrarlas.
Consideraremos en pnmer lugar el caso unidimensional. Entenderemos
por segmento de curva (o 1-scgmento) en una superficie lvf una "curva"
a: [a, bJ......¿ M definida en un intervalo cerrado de la recta real E 1 • (La
diferenciabilidad de a significa que es posible extenderla a una curva
auténtica en un intc1Talo abierto mayor, como lo requiere la -definición
4.1 del capítulo l.)
Sea a continuación cp una 1-forma en 1\1. La retroacción a*cf> de ~J al
intervalo [a, b] tiene la expresión f(t) dt, donde, según los comentarios
hechos después del ejemplo 4.7,
f (t) =
(a'"</>) (U 1 ( t) ) = cp (a ( [' 1 ( t) )) = <?(a' ( t) ) .
Por lo tanto, el procedimiento que acabamos de describir resulta en la
definición siguiente.
6.1 DEFINICIÓN. Sea cp una 1-forma en )1¡[, y sea a: [a,b]->J;f un
1-segmento (figura 4.37). Entonces, la integral de cp sobre a es
En la ingeniería y en la física, se llama a la integral Ja 9) integral de
línea, y tiene una amplia diversidad de aplicacimws. Por Pjemplo, supongamos que un campo vectorial V en una superficie sea un eamj;o de fuerza,
de manera que en cada punto pele Af, F(p) sea una fuerza que se aplica
en p. Si volvemos a nuestra idea original ele cun·a, podemos suponer
además que a: [a, b]......¿j\J describe d movimiento de un punto masa, donde
a ( t) será su posició11 e u el momento t. ¿Qué cantidad total de trabajo W
se necesita para llevar a a desde p = .a(a) hasta q = a(b)? Lo que se
dijo ele la velocidad en el capítulo I, sección 4, nos enseña que, para
un valor pequeño de t:..t, la trayectoria de la curva a a partir de a(t) hasta
a(t + t::.t) es aproximadamente el segmento ele recta que describe t:..t a'(t).
Ahora bien, tenemos que el punto en movimiento sólo se ve obstaculizado
en sus avances por la componente tangencial a a de fuerza, es decir,
a' (t)
Gdfü~
(!
l.)
Figura 4.37
196
EL CÁLCULO EN UNA SUPERFICIE
V(cx) • -'{_
11 ex' 11
=
11
V(cx)
11
cos &
(figura 4.38). Por lo tanto, el trab:1jo que se hace en contra de la fuerza
durante el intervalo de tiempo !:::,t es (aproximadamente) fuerza - T' (·ex ( t)) •
[a'(t) /il a'(t) i!J por distancia 11 cx'(t) l[!:o.t. Al sumar estas contribuciones
sobre la totalidad del intervalo ele tiempo [a, bJ y tomar el límite habitual,
obtenemos
V
\
W = V (ex ( t) ) •a' ( t) d t.
\
''
r
'
Para expresar esto mismo con mús sencillez,
\amos a elefini1· la 1-forrna dual cf> tal que,
para cada vector tangente w en p, </>(w)
w•V(p). Entonces, por la definición 6.1, el
trabajo total C!~ preri:;amente
\
' '>
!:J.ta.'(~//
rJ:..-----~)
/'
a(t)
TV
= -
L
</>.
Figuu 4. J8
Insistimos en que esta idea de integral de
linc:t ··-como lo demás que hacernos con las
formas- se aplica sin alteración al reemplazar la superficie lvf por un
espacio euclidiano o, ele hecho, por n:alqu;cr z·aricdad (sección 8).
Cuando la 1-forma cp es una derivada exterior df, la integral de Enea
IO! cf> tiene una propicch1d interesante que mnstituye un:1 generalización del
teorema fundamental del cálculo.
6.2 TEOREMA. Sea f una función en A1, y sea ex: [a, b] --7 A1 un 1-sPgmento en }.f que vaya de p = a (a) a q ·= a ( b). Enlonc·es
J df
=
f(q) - f(p).
O!
Demnstración. Por definición,
Ldf = J>lf(a')
dt.
Pero
df(cx') = a'[f]
=~(fa).
En consecuencia, ele acuerdo con el teorema fundamental del cálculo,
tenernos
b
d
J df= J -(fa)dt~'f(a(bj)
dt
<t
el
-j(a(a)) =f(q! -[(p).
1
Se dice que h integral JO! df es, por tanto, independiente del camino.
En el lenguaje que hemos venido empleando, si el campo ele funza V tiene
INTEGRACIÓN DE FORMAS
197
1-forma dual df, el trabajo realizado dependerá no de la forma en que se
mueve el punto a ( t), sino solamente de donde comienza y acaba. En
particular, si va por una curva cerrada p = a (a) = a ( b) = q, no rcali;.:a
ningún trabajo (total).
Desde el punto de vista matemático, podernos HT el teorema anterior
más o menos de la manera siguiente: la "frontera" del segmento a que
va de p a q es q - p, donde el sig:r::.o de menos (que es purl\mente formal) indica que a parte de p para ir a Cf. Entonces la integral de df sobre
a es igual a la "integral" de f sobre la frontera q - p; esto es lo mismo
que f(q)- f(p). Justificaremos esta interpretación por el teorema análogo (6.5) que corresponde a la dimensión 2.
Ahora bien, un intervalo bidimensional no es mús que un rectúngulo
cerrado R: a< u< b, e::::::; v :S d en E". Y un 2-segmento en Af será
un mapeo cliferenciable x: R --7 A1, de un rectángulo cerrado en Af (figura 4.39). (Como teníamos antes, la diferenciabiliclad significa aquí que podemos extender difcrenciablemente x a un conjunto abierto en el que
esté contenido R.)
Aunque hemos usado la notación de las cartas, x, no suponemos aquí
que x es regular ni que es uno a uno. Las velocidades parciales Xn y Xv
siguen estando a nuestra disposición, aunque x no sea carta, sin embargo.
Si r¡ es una 2-forma en Af, entonces la retroacción x'''r¡ de 17 tiene, s1
aplicamos el ejemplo 4. 7, la expresión en coordenadas h du dv, donde
Por lo tanto, guardando analogía estricta con la dPfinición 6.1,
cemos la siguiente
6.3 DEFINICIÓN. Sea r¡ una 2-forma en 1\1 y sea x: R-¿
mento. Entonces la integral de r¡ sobre x es
íí
JJX
r¡ =
rr
JJR
x*r¡
= rb
JlL
j[
e~table­
un 2-seg-
íd r¡(xu, x,) du dv.
C
Las aplicaciones físicas ele esta idea ele integral tal vez sean más ncas
que las ele la definición 6.1, pero es necesario que no nos retrasemos, con
objeto de enunciar sin más tardanza la analogía bidimensional del teorema 6.2.
Figura 4.39
198
EL CÁLCULO EN UNA SUPERFICIE
6.4 DEFINICIÓN. Sea x: R ~M un 2-segmento en lvf, donde R es el
rectángulo cerrado a< u< b, e< v < d (figura 4.40). Las curvas arista
(o aristas) de x son los 1-segmentos a, {3, y, 8 tales que
d
e
(1')
EJ/3)
b
x(u, (
f3 (V)
=
x(b, v)
~'(u)
= x(u,d)
8 (u) = x(a, u)
-+--"---'-(a-'------:!-- U
a
a(u) =
Entonces la frontera x del 2-segmento x es la expresión
formal
= a + f3 - y - 8.
Figura 4.40
ex
Estos cuatro segmentos de curva son lo que obtenemos al considerar
la función x: R ~ Af solamente en los cuatro segmentos de recta que
constituyen la frontera del rectángulo R. Los signos formales ele menos
frente a y y 8 en ox son recordatorios de que debemos '·invertir" y y 8
para efectuar un viaje consistente por los bordes de R, y, por tanto, de
x (figura 4.41). Entonces, si ·e/> es una 1-forma en lvf, la integral de cp sobre
la frontera de x se define como
La analogía bidimensional del teorema 6.2 es, entonces,
6.5 TEOREMA (El teorema de Stokes). Si cp es una 1-forma en M y
si x: R ~ J1 es una 2-segmento, entonces
Demostración. Trabajaremos con la integral doble, para demostrar
que rrsulta ser la integral de cp sobre la frontera de x. Al combinar las
definiciones 6.3 y 4.4, tenemos
JL
drp =
JL
(rlq>) (xu,xv) dudu =
JL
Gu(cf>xv)-
a~ (rpxu))dudu
Sea f = cp (xu), junto con g = rp (Xv) ; entonces, esta ecuación toma la
forma
d
e
a
b
Figura 4.41
199
INTEGRACIÓN DE FORMAS
rr
JJ'(
dcp
=
rr.
og du dv-
Jj ~ au
rr a¡ du dv.
JJI! av
(1)
A continuación trataremos a estas integrales dobles como s1 fueran
integrales iteradas. Supongamos que se nos dé el rectángulo R por las
desigualdades a< u< v, e< v <d. Al integrar en pnmer lugar con
respecto a u, encontramos
jj
ca du dv
---'?.
R
OU
= Jd I ( v) dv,
rb ag
I ( v)
donde
e
En la integral parcial que define I ( v), la
v representa una constante, de manera que
el integrando no pasa de ser la derivada
ordinaria con respecto a u. Por consiguiente,
la aplicación del teorema fundamental del
cálculo resulta en
Jaou (u, v) du.
d
!(a,,¡
V
¡(b, ,¡
e
a
I(v) = g(b,v)- g(a,v).
b
Figura 4.42
(figura 4.42). En consecuencia,
ir og du dv
JJ;~Oll
=
rd
Jc
g(b, v) dv-
id g(a, v)
jc
dv.
(2)
J'\uevamente vamos a trabajar con la pnmera integral. Por definición,
g ( b, V)
cp (x,. ( b 1 V) ) .
=
Pero xv( b, v 1 es precisamente la velocidad /3' ( v) ele la curva /3 del "lado
dcrc'cho'' en (x. En consecuencia, de acuerdo con la definición 6.1,
\'l g(b, v)dv = jrl cp((3'(D) )dv =
a~ e
e
r <f>.
Jt3
Con una argumentación parecida, vemos que la segunda integral de (2) es
/0
q>; por consiguiente,
rr ag du dv = r
JJn ou
JB
cp -
i cp.
Jo
(3)
De la misma manera -aunque aquí integramos en pnmer lugar ¡con
respecto a v !--, encontramos
r·
11
at
-.·-
JJnCv
du d~'
=
r
\Y (!> J
j
q,.
(4)
a
Si reunimos la información de ( 1) , ( 3) y ( 4), obtenemos el resultado que
pedimos:
1
200
EL CÁLCULO EN UNA SUPERFICIE
Es posible considerar el teorema de Stokes como formulación bidimensional del teorema fundamental del cálculo; su jerarquía es la de uno
de los resultados más útiles dentro de las matemáticas. En los textos ele
cálculo avanzado se encuentran formulaciones alternas del teorema y aplicaciones exhaustivas; lo mismo en libros ele matemáticas aplicadas. Nosotros los emplearemos para estudiar la gcometr:a de las superficies.
La integral de línea f" rp no es demasiado sensible a las repar?mctrizaciones de a; todo lo que importa es la dirección en qnc se recorre la
trayectoria de a. En el lema siguiente utilizaremos la notación del ejercicio 10, II.2.
6.6 LEMA. Sea a ( h) : [a, b]---¿ :YI una rcparamctrización de un segmento
de curva a: [e, d]---¿ Af. En cualquier 1-forma rp en jYJ
si h conserva la orientación
{_
si h invierte la orientación
Demostración. Puesto que la velocidad de a(h) es
a ( h) ' =
~: a' ( h),
tenemos que
J
a(h)
dh
rp = b rp(a(h)') du = Jb rp(a'(h)) -du
Ja
a
du
Aplicaremos a continuación el teorema del cambio de variables en una
integral. Si h conserva la orientación, entonces h (a) = e y h ( b) = d, ele
manera que la integral anterior se convierte en
J~
rp(a') du =
Lrp.
Pero en el caso de la inversión de orientación, h (a) = d y h ( b) = e, con
lo que tenemos
Este lema nos viene a dar una interpretación concreta de los signos formales de menos en la frontera ox = a + (3 - y - 8 de un 2-scgmento x.
Para cualquier curva ~: [tu, t 1 ]---¿ "U, sea - ~ cualquier reparametrización
de ~ que invierta la oricnt:tción, como, concretamente,
Por tanto, de acuerdo con el lema, tenemos que
201
INTEGRACIÓN DE FORMAS
Lrp=-trp
y, s1 x es un 2-segmento, entonces
EJERCICIOS
1. Si a = (a 1 , a 2 ) es una curva en E 2 y si rp es una 1-forrna, demuéstrese esta regla que se aplica a los cálculos para encontrar <P (a') dt:
se pone u = a1 ( t) y v = a 2 ( t) en una expresión en coordenadas
<P = f(u, v) du + g(u, v) dv.
2. Consideremos el segmento ele curva a: [ -1, 1]
--7
E 2 tal que a(t)
2
( t, t ) •
a) Si rp = v 2 du + 2uv dv, calcúlese Ja rp.
b) Encuéntrese una función f tal que df = <jJ y wrifíquese, en este
caso, el teorema 6.2.
3. Sea rp una 1-forma en una superficie M.
a) Si 4> es cerrada, hágase ver que rA) = o para todo 2-segmento en M.
b) Si q, se exacta, muéstrese (con más generalidad) que
en cualquier "ciclo" de segmentos de curva
Figura 4.43
a 1, • • • a¡Jak+l = a 1 ) tal que ai termina en el
punto inicial de O:i+l (figura 4.43). (Cerrada
significa que drp = O, exacta, que ·1> = df; véase el ejercicio 2
ele IV.4.)
4. La 1-forma
tf; =
u du - v du
-u2 + v2
~--·-
está bien definida en el plano E 2 si retiramos el ongcn (0, O). Verifíquese que
a) fes cerrada, pero no exacta. (Indicación: Intégrese alrededor ele
la circunferencia unitaria y aplíquese lo que se obtm·o en el ejercicio 3.)
b) si se restringe concretamente .¡; al semi plano ele la derecha u > O,
entonces 1f¡ se vuelve exacta.
EL CÁLCULO EN UNA SUPERFICIE
5.
(Continuación). Del ejercicio 12 de II.l se desprende que toda curva
a en E~ que no pase por el origen se puede expresar en la forma polar
a ( t)
= (r ( t) cos -& ( t) , r ( t) sen -& ( t) ) .
Demuéstrese que, para toda curva
entero. Este entero se llama índice
algebraico total de veces que .a ha
contrario al de las manecillas del
cerrada a, ( 1 /2-rr) Ja .¡; tiene valor
de enlace de; representa el número
dado vuelta al origen en el sentido
reloj.
6. Sea x una carta dentro de una superficie A1. En un segmento de
curva
a< t < b,
a (t) = x (at( t) , a 2 ( t) ) ,
hágase ver que
r
J,
</> =
rb ( (
Ja
</>
Xu)
da1
dt
+
da.,)
<f>(xv) dt- dt
donde se evalúan Xu y Xv en (a 1, a 2 ). (Esto viene a generalizar el resultado del ejercicio 1, puesto que podemos emplear la carta identidad
x(u, v) = (u, v) en E 2 .)
7. Sea a la curva cerrada
a(t)
=
x(mt, nt),
en el toro T (véase el ejercicio 11 de IV.3). Calcúlese
a) fa~' donde ~es la 1-forma en T tal que ~(xu) = 1 y ~(xv) =O.
b) far¡, donde 17 es la 1-forma tal que r¡(xu) =O y r¡(xv) = l.
Si y es una curva cerrada arbitraria, Jy~/2-rr es el número total
de las veces que y viaja alrededor del toro en la dirección general de
los paralelos, mientras que f-vr¡ /2r. es una medida parecida en la dirección de los meridianos. Esto es lo que sugiere la notación de uso
común ~ = d-&, r¡ = d'f, donde {J. y 'f son las funciones ( ¡ multiv::duadas l) ele longitud y latitud ('Il T; véase, sin embargo, el ejercicio 13.
8. Sea F: A1-> N un mapeo. Demuéstrese que:
a) Si a es un segmento de curva en lv1 y si <P es una 1-forma en N,
entonces
b) Si x es un 2-scgmento en M y si v es una 2-forma en N, entonces
r F*v = r
Jx
V
JP(x)
9. Sea x: R--e) :S el 2-segmento en la esfera :S que se obtiene al restringir
la carta geográfica
x(u,v) = (rcosvcosu,rcosvsenu,rsenv)
203
INTEGRACIÓN DE FORMAS
al rectángulo R: O< u, v < r./2. Encuéntrense fórmulas explícitas
de las curvas de arista a, (3, y, o de x, y hágase un dibujo de estas
curvas y de la imagen x(R) en la esfera :S.
1O. Sea x: R
~ jVJ
un 2-st:gmento definido en el rectángulo
R:
Si
rp es
la 1-forma en
M
o< u, V<
l.
tal que
rp(xu) =u+
V
y
rp(xv)
=
uv,
calcúlense f fx drp y / 2x y verifíquense los resultados mediante el
teorema de Stokes. (Indicación: x'''(drp) = d(x*<p) = (v- l)du dv.)
11. Lo mismo que el ejercicio 10, con la excepción de que R: O ::::= u <
O< v <"'y rp(xu) =u cos v, rp(xv) = v sen u.
r. /2,
12. Una curva cerrada a en lvf es homotópica con respecto a una constante
cuando hay un 2-segmento x: R ~ J..1 para el que a) a es, de hecho,
la curva de arista a de x; b) f3 = o, y e) y es una curva constante
(figura 4.44). (Supongamos que R: a <u < b, e< v S d. Entonces,
a medida que v 0 varía de e a d, la curva u-parámetro cerrada v = v 0
de x varía sin dejar de ser lisa desde a a la curva constante y.)
Demuéstrese que toda curva cerrada en E 2 es homotópica con respecto
a una constante.
13. Sean rp una 1-fonna cerrada y a una curva cerrada. Demuéstrese que
I a <t) = o si, o bien
a) q, es exacta, o bien b) a es homotópica con respecto a una constante.
Dedúzcase que, en el toro T, los meridianos y los paralelos son
homotópicos con respecto a constantes, y que las formas cerradas ~ y r¡
(del ejercicio 7) no son exactas.
Se dice que una superficie .i\1 en b que tr'.:'a curva cerrada es
homotópica a una constante es sinz j;lcnzen te c:;ncxa. Por tanto, el plano es simplemente conexo (ejercicio 12), pero un toro -o un plano
en que se ha retirado un solo punto- no lo es (ejercicios 7 y 5). Sin
hablar con mucha precisión, podemos decir que una superficie simplemente conexa no tendrá hoyos en ella, y que cuatro curvas cualesquiera
a, (3, y, o que se unen unas con otras como las de la figura 4.45,
Figura 4.44
Figura 4.45
204
EL CÁLCULO EN UNA SUPERFICIE
constituyen, de hecho, las curyas frontera de algún 2-segmento. t
Aprovéchese esta afirmación para demostrar que:
14. Ln una superficie simplemente conexa, la integral ele una 1-form::~
cerrada q' es independiente de la trayectoria que se siga al integral.
(Es decir, que f"' cp vale lo mismo para todas las curvas a que tengan
los mismos extremos.)
p
Figuro 4.46
1S. En una superficie simplemente conexa, toda
1-forma cerrada es exacta. (Indicación: Fíjese un punto p 0 en 1\I y definase / (p) = /a</>
para cualquier segmento de curva que vaya
ele p 0 a p (figura 4.46). Para verificar que
df(v) = (v) en un vector tangente v en p,
c!enruéstrese que si a es una cun·a con velocicl::!cl inicial v, entonces
f(a(t)) = f(p)
7
r
+ ,,
<p(a'(u)) du.)
Propiedades topológicas de las superficies
Vamos a explicar a continuación algunas ele las más fundamentales propiedades que se pueden encontrar en una suprrficie.
7.1 DEFINICIÓN. Una superficie 1\1 es conexa siempre que, para dos
puntos cualesquiera p y q de Af, existe un segmento ele cun·a en A1 que va
de p a q.
Por consiguiente, una superficie conexa M es ele una sola pieza, puesto
que se puede ir ele un punto cualquiera ele A1 a cualquier otro sin salir
ele M. La mayor parte de las superficies de las que hemos hablado aquí
son conexas; la superficie 1'>1: z 2 - x 2 - y 2 = 1 (el hiperboloide de dos
mantos) no es conexa. La condición de conexión es suave y plausible, y
bien se le puede incluir en la dPfinición ele superficie, si ello parece conveniente.
7.2 DEFINICIÓN. una superficie M es compacta cuando M puede
quedar cubierta por las imágenes ele un número finito de 2-segmentos 'en A1.
Sin precisión, ser compacta una superficie significa que tiene tamaño
finito. Por ejemplo, las esferas son compactas, puesto que si empleamos
la fórmula de x (u, v) del ejemplo 2.2 en el rectángulo cerrado
t Hay en las páginas 15 7-165 de Lefschetz [8] una relación sistemática de
la conexión simple; allí se demuestra que las esferas son simplemente conexas.
PROPIEDADES TOPOLÓGICAS DE LAS SUPERFICIES
205
entonces :S es la imagen de este único 2-segmento. De la misma manera,
el toro ele revolución (ejemplo 2.6), o cualquier superficie cerrada de
revolución, es compacto.
La demostración del lema siguiente se vale del hecho fundamental
siguiente: Si f es una función continua ele \·al ores reales, definida en el
rectúngulo cerrado
e:::=: u< d,
R: a :S u< b,
entonces
f
toma un valor máximo en algún punto de R.
7.3 LEMA. Si f es una función continua en una superficie compacta Af,
entonces f toma un valor máximo en algún punto de },f. (Es obvio que
aquí podemos también decir mínimo en lugar de nuíximo.)
Demostración.
Por definición, existe un número finito de 2-segmentos
Xi:
Ri ~M ( l < i < k)
cuvas im[tgencs cubren la totalidad de Jo.I. Puesto que cada Xi es diferenci:1ble, es también continua, de manera que cada función compuesta
fx;: R¡ -~ R es continua. Por consiguiente, según el comentario anterior,
hay, pan c::-,cla índice i, un punto (u;, z•;) en R;, donde la función fx,
tnma un \'alor máximo. Sea concretamente f (x 1 ( u 1 , u1 ) ) d mayor de estos
k \·alores máximos. Afirmaremos que f toma su valor máximo en el punto
In =x 1 (u 1 , u1 ). De hecho, vamos a clcmosérGr que si p es un punto cuGlquicra ele Jf, entonce~ f (m) > f (p). Puesto que los 2-segme!ltus x,, · · ·, Xk
cubren a JI, hGy un índice i tal que p = X; (u, v). Pero, entonces, de
acuerJo con lo que hemos construido,
E:;tc rcsullaclo, que tiene gran utiliuacl, se puede aplicar parG demostrar
que una superficie no es cornpacta. Por ejemplo, no hay ningún cilindro
e (como d dd ejemplo l..)) que 'ca compacto, puesto que la función
coonlcr:.ac~~' .: en C cla la alLm a ;:: ( p) ele cacb punto p por encima del
pbno xy, y, por tanto, no tiene valo~ máximo en C.
Sin embargo, la definición 7.2 es un poco más astuta ele lo que aparenta.
Consicl(_'lunos, por ejemplo, el disco unitario abierto D: x" + y 2 < 1 en el
plano xy. Ahora bien, D es una superficie, y tiene área finita -:r. pero D
no es compacta: es suficiente para advertirlo observar que la función
continua f = ( 1 - x 2 - • y2) -l carece de máximo en D. En general, una
superficie compGc la no pu2cle tener orilhs abierlGs, como las tiene D.
Debe estar bien cerrada por todas partes -además ele tener t.Gmaí'ío
finito-, corno la esfera o el toro.
Una superficie orientablc es informalmente una que no está torcida.
Tal n·z la formubción siguiente sea la más sencilla de las muchas definiciones equivalentes de oricntabilidad.
206
EL CÁLCULO EN UNA SUPERFICIE
7.4 DEFINICIÓN. Una superficie M es orientable cuando existe una
2-forma ,u en M que es diferente de cero en cada punto de lvf.
(Una 2-forma es cero en un punto p si vale cero en cada
vectores tangentes en p.) Por tanto, el plano E 2 es orientable,
que du dv es una 2-forma que no se anub. Aunque es sencilla, la
ción resulta un poco misteriosa, ele manera que demostraremos 1~
de un criterio más acorde con la intuición.
par de
puesto
definivalidez
7.5 TEOREMA. Una superficie J.f en E" es orient~1ble si y sólo si existe
un campo vectorial normal Z en 111 que es diferente de cero en cada
punto de 1\1.
Demostración. Usaremos el producto vectorial de E 3 para convertir
los campos vectoriales normales en 2-formas y viceversa. Si Z es el del
enunciado, dr:"finamos una 2-forma 1' en Jf ele la manera siguiente: para
cualquier par v, w ele vectores tang;_-ntes a 11f en p, ,,_:a
ft(v, w)
= Z(p) •v
X
w.
Las propiedades estándar del producto vectorial nos enseñan que •'' es, en
realidad, una 2-forma que no se anula en 11!. Por l~mto, ;H es oricntable.
Supongamos recíprocamente que lvf es orientable, y que p, es una
2-forma en Af que no se anula. Si v, w forman un par linealmente independiente de vectores tangentes en p, entonces
p,(v, w) -:p O,
pues, de no ser así, p, valdría cero en p. Definamos a continuación
vXw
Z(p) - ft(v, ,~)·
Esta fórmula tiene la notable propiedad de ser independiente de la manera
en que elijamos los vectores v, w en p. Para expresarnos explícitamente, en
cualquier otro par así v, w, se desprende del lema 4.2 y de la fórmula
análoga de productos vectoriales que
v-x w
V/( Vt
¡t(v, w)
De este modo, hemos obtenido un campo vectorial euclidiano bien definido
en la totalidad de M. Las propiedades del producto vectorial nos hacen
ver nuevamente que Z es normal en todas partes a JJ, aunque nunca
es cero.
1
Ec: así como se desprende del lema 3.8 qne toda superficie ele E' que se
pueda definir implíciLtmcnte es orientable. Por ejemplo, todos los cilindros, superficies de revolución y esferas (de hecho, todas las superficies
3
PROPIEDADES TOPOLÓGICAS DE LAS SUPERFICIES
207
Figura 4.47
ele revolución) son orientablcs. Sin embargo, en E" Ln11bién hay superficies
que no son orientables. El ejemplo más simplé• de esto e,; la c6lebre
cinta ele I\1óbius J1, que se puede formar a partir ele un::t tira de papel
si se le da media vuelta y se pegan los extremos. :En el cjcrcic;o 7 se da la
construcción formal de una cÜ1ta de l\Iobius particubr. í Jf resulta ser
no oricntable, puesto que todo campo vectorial normal ;¿ en Al tiene
que ser, en alguno de sus puntos, cero. Para entender esto, sea y una
curva cerrada, como lo indicamos en la figura 4.47, t0l que y(O) =
y ( 1) = p. Si suponemos que Z no cs nunca cero, entonces la torcedura
de M impone la contradicción Z (y ( 1) ) = - Z (y (O) ) , puesto que la función t --¿ Z ( ¡r ( t) ) es difercnciable (es decir, Z varía continuamente a
medida que se mueve alrededor de y).
Las tres propiedades que hemos explicado en c.sta sccoon --conexwn,
compacidad y orientabilidad---- son jJrojJiedades topológicas: Resulta posible
definirlas a partir solamente de conjuntos abiertos y funciones continuas,
sin considerar en absoluto la clifcrt'nciabiliclacl. Con estas definiciones, cuya
generalidad es mavor, haremos una demostración mJ.s conceptual del resultado siguicnte.
Sean A1 y N superficies en E 3 tales que 1H está contenida en N. Si Af es compacta y si N es conexa, entonces M = N.
7.6
TEORE;-.rA.
(Si N no fuera conexa, podría estar constituida por dos superficies, de
las que lvf sería una. De la misma manera, el resultado no se obtiene si
JJ no es compacta; consideremos el caso ele un disco abierto A1 en el plano
X)', que sería N.)
Demostración. El ejercicio 15 ele la sección 3 nos enseña que M es
conjunto abierto ele N. Vamos a suponer que Al no llena por completo
a N, y obtendremos una contradicción. Por hipótesis, tenemos un punto n
ele N que no está en 1i1. Sea n1 un punto ele Al. Puesto que N es conexa,
h::Jy un segmento ele curva a en N que va ele
a(O} =m
a
a(1) = n.
209
PROPIEDADES TOPOLÓGICAS DE LAS SUPERFICIES
2. Sea F un mapeo de una superficie A1 sobre una superficie N. Demuéstrese que:
a) Si 1\1 es conexa, entonces N es conexa.
b) Si A1 es compacta, entonces N es compacta.
3. Sea F: !\1 ~N un mapeo regular. Demuéstrese que, si N es orientable,
entonces A1 es orientable.
4. Sea f una función diferenciable definida en una superficie conexa M
de valores reales. Demuéstrese que:
a) Si df = O, entonces f es constante.
b) Si f no es nunca cero, entonces o bien f > O, o bien f < O.
S. a) Demuéstrese que una superficie orientable y conexa tiene exactamente dos campos vectoriales unitarios normales, que son inversos
aditivos uno del otro. Los denotaremos por +U. (Indicación:
Aplíquese el resultado del ejercicio 4.)
b) Si !\1 es una superficie no orientable, demuéstrese que cualquier
punto ele M queda contenido en una región orientable y conexa.
(Por tanto, aunque sea en una superficie no orientablc, existen
localmente los campos vectoriales unitarios y normales.)
6. Sea F: lv1 ~N un mapeo regular. Demuéstrese esta generalización
del teorema 7.6. Si "\1 es compacto y N es conexo, entonces F lleva
M sobre N.
7. Una cinta ele 1\fobius A1 (figura 4.L17) se puede construir como superficie reglada
x(u,u)
=~(u)+
u8(u),
donde
~(u) =
(cos u, sen u, O)
S(u)
(cosU~(n)
=
+
(sen~)U 3 .
(El rayo L, al atravesar la circunferencia
mente una media \·uelta.)
a) Calcúlense
E= z··
't
+
[1
+
z·cos (u/2)]\
~
una sola vez, da única-
F =O,
G
=
1,
y dedúzcasc, ccmo se hizo en el ejercicio 2 de la sección 2, que x
es regular.
b) Muéstrese la curva u-paramétrica, v = {, en un dibujo de lv1.
Demuéstrese que las cun·as u-parámetro son cerradas y que (con
la excepción ele ~) tienen período igual a 4-c·.
210
EL r,ÁLCULO EN UNA SUPERFICIE
8. Sea }vY la superficie que se obtiene al quitar la circunferencia central
(3 de la cinta de 1\fi:ibius del último ejercicio. ¿Es Jf' conexa? ¿Es
orientablc?
9.
(Contraejemplos). Pónganse ejemplos para exhibir la falsedad ele los
enunciados siguientes:
a) Los recíprocos de los incisos (a) y ( b) del ejercicio 2 .•
b) El ejercicio 3 sin la regularidad ele F.
e) El recíproco del ejercicio 3.
1O. l.' na superficie Af en R 7 es cerrada E'n E·' cuando los puntos ele E"
que no están en Af constituyen un conjunto abierto de E". (Si p no
está en Af, hay una e-vecindad de p que no intersecta a .H.) Hágase
ver que:
a) Toda superficie en E" que se pueda describir en la forma implícita
1\1: g = e es cerrada C'n E-1 •
b) Toda superficie cm:1pacta en E-3 es cerrada en E".
11. (Acotamiento). Una superficie 1\1 en E 3 estará acotada cuando haya
un número R. tal que il p :1 <R. pma todos los puntos p de M.
(Por tanto, Af está en el interior ele una esfera.) Demuéstrese que
una superficie compacta en E 3 está acotada.
En los últimos dos ejercicios hemos visto que una superficie compacta en E" está cerrada y acotada; los enunciados recíprocos son consecuenci~c de un teorema topológico fundamental.
12. Demuéstrese el teorema 7.6 al suponer simplemente que M es cerrada
en E 3 (en lugar de compacta) .
13. Decídase, en cada caso, si la superficie M: g = 1 es compacta o
conexa:
a) g = xe - y 3 + z'.
e) g = z"' + x 2y".
b) g = X 1 - y + Z.
d) g = (x" + y 2 - 4 )2 + (z - 4 )".
14. Demuéstrese que toda superficie de revolución M es conexa y orientable, pero que 111 es compacta si y sólo si su curva perfil C es
cerrada.
8
Variedades
Las superficies en E 3 son cosa ele nuestra experiencia cotidiana, ele manera
que resulta razonable estudiarlas matemáticamente. Pero si examinamos
esta iclca con mirada crític:1, bien podemos preguntarnos :1cerca de la existencia ele superficies en E 1 · · o en E" · · · o, inclusive, superficies que
no estin en ningún espacio euclidiano en absoluto. Para construir '.ma
definición ele una superficie" así, no podremos apoyarnos en nuestra expe-
VARIFDADES
211
riencia directa del mundo real, sino en nuestra experiencia matemática de
las superficies de E". Por consigFicnte, vamos a eliminar de la definición
fundamenta! de ( 1.2) todos los rasgos en que interviene E", de la rnanrra
que sea. Lo que nos quede será sencilhmentc una superficie.
Para empezar, diremos que una superficie será un conjunto 1H: una
colección de objetos absolutamente cualcsc¡uicra, no m'Cesariamente puntos
ele E·'. Aquí, ·,ma carta abstracta dentro de ;\1 será simplemente ~ma función uno a uno x: D --;. jf de un con junto abierto }) de E" al conjunto Af.
Hasta este punto, crtrecemos de manera de decir qué significa para una
funci6n así ser cliferenciable. Pero todo lo que necesitamos para obtener
una definición ele superficie que funcione es la condición de traslapamicnto
liso ( corobrio 3.3). Demostrar esto es una imposibilidad lógica, de manera
que, como es habitual en matemáticas. haemos de ello un axioma.
8.1 DFFI:\'ICJÓN. Una superficie e~ un conjunto ""if provisto ele una
colección D) de cartas abstractas dentro de }.1 tal que:
1) Las imágenes ele las cartas de la colección .f(1 cubren a A1.
2) Para dos cartas cualesquiera x, y en la colección fP, las funciones
compuestas y- 1 x y x-1 y son euclidianamente diferenciables (y están definidas en conjuntos abiertos de Eé).
Esta definición viene a generalizar la definición 1.2: una superficie en
E 3 es una superficie. Pero hay aquí un gran número de superficies que
jamás encontraremos en E 3 •
8.2 EJEMPLO. El plano proyectiuo ~- A partir de la esfera unitaria
" en E 3 , construimos el plano proyectivo ~ al identificar los puntos antípodas de ::S: es decir, al considerar que p y - p son
el mismo punto (figura 4..49). Desde el punto de
vista formal, esto significa que el conjunto ::S se compone ele todos los pares antípodas {p, - p} de puntos
de la esfera. (Aquí el orden no tiene importancia,
PS ckcir, {p. -p} = { --p, p}.)
Para hacfT de~ una su¡wrficie ----y para estudiarla
posteriormente--- usaremos dos funciones: el mapeo antípoda A (p) = - p de la esfera ::S y la proFigura. 4.49
'yección P (p) = {p, - p} de ::::: en :S. Hay que observar quePA= P, y que (~:): J'(p) = P(q) si y sólo si o bien q = p, o bien
q =-p.
Diremos que un; carta ¡·s "pcc¡uefia'" cuando la distancia t·uclidiana
entre dos cualef:quiera de sus puntos es menor c¡uP l. Si x: ~---;. :i es
una carta pequeña, entonn·s h función compuesta P (x) : D--;. ::S es uno
a uno y, en consecuencia, cuta abstracta dentro ele S:. La colección de
todas esas cartas abstractas hact· de ::S una supcrfic·ie; con esto se aclara
212
EL CÁLCULO EN UNA SUPERFICIE
la pnmera condición de la definición 8.1, y pasaremos a describir ~uma­
riarnente la demostración de la segunda.
Supongamos que P(x) y P(y) se traslapen en ::.S; esto significa que
sus imágenes tienen un punto en común. Si x y y se traslapan en 2, se
hace ver que (Py)- 1 (Px) = y-- 1x, que, de acuerdo con el corolario 3.3,
es difcrcnciable y está definida rn un ronjunto abirrto. (! nd icr11 i:ín:
U tilícesc la pequeñez y ~:.) Si, por otra partc, x y y no sf' traslap~n, se
recrnplaza y por A (y). Entonccs x y A (y) se traslapan, y podernos aplicar
la argumentación antc¡;ior.
En conclusión: el plano proyecti\·o ~ es una superficie. i·
Para remarcar la distinción entre una superficie de E 3 y el concepto
gent:ral de supprficie que hemos definido, hablaremos a \Tces de lo
segundo como una superficie abstracta. ObseJYemos que E 2 es una superficie abstracta si se le provee de únicamente la carta x(u, v) = (u,¡·).
Para obtener todas las cartas que sea posible dentro ele una superficie
abstracta ./\1, es habitual aumentar la colección ~P de cartas que se da
para incluir todas las cartas abstractas en ./\1 que se trasbpen lisamente
con las de !:./' ..\! trabajar con ./\1, éstas srrán las únicas cartas c¡uc podremos
usar. Insistiremos que las superficies abstract;ls 1\11 y Jf0 con el mismo
conjunto de puntos serán ---ele cu:1k¡uier m:1nna--- diferentes superficies
son distintas.
y sus colecciones ( aumC'nt:1d:1s) de c:1rtas !Y 1 y
IIay Pn esencia un problema que se debe resolver al establecer el
cálculo de un:1 superficie abstracta .1\f, que consiste en definir la velocidad
de una curva en .1\f. En todo lo demás --funciones diferenciables, las
mismas curvas, los vectores tangentes, los campos vectoriales tangentes,
las formas diferenciales, ctcétt:ra-- las definirione.\ y teoremas que se han
dado para superficies t:n E 3 se aplican sin cambio alguno. (Es necesario
trabajar un poco con unas cuantas demostraciones que se hagan cargo
de la definición 8.3, pC'ro no se plantean problemas gra\'eS.) La velocidad de
una curva es algo que nos abandona en el caso abstracto, puesto que
antes consistía en vectores tangentes a E", y aquí carrcemos de E'l.
N o importa en absoluto la manera en que definamos la velocidad a' ( t)
ele una curva, siempre que la nueva definición nos lle\·e a las mismas
propiedades esenciales ele antes. Lo que se necesita es la propiedad de la
derivada direccional (lema 4.6 del capítulo I).
8.3
DEFIKICIÓK.
Sea a: 1--¿ M una curva en una superficie abstracta
1\1. Para cada t en 1, el vector de velocidad a' ( t) es la función tal que
a'(t 1 [fl = rj(fa) (t)
dt
para toda función
f
en A1 que sea diferenciablc y de valores re:1les.
·r La terminología de este ejemplo proviene de la geometría proyectiva, sin
embargo. El ejercicio 2 nos hace ver que se describe mejor a C:; como esfera torcida.
VARIEDADES
213
Por lo tanto, a' ( t) es una función de valores reales con dominio igual
al con junto de todas las funciones diferencia bies de kl. Esto es todo lo que
necesitamos para generalizar el cálculo de las superficies en E 3 al caso
de una superficie abstracta.
Tal vez el lector sienta que ha ido demasiado lejos en la abstracción,
pero nos falta dar un solo paso para recorrer todo el camino .•
Tenemos ya un cálculo para En (capítulo I) y un cálculo para superficies. Son estrictamente análogos, pero, en matemáticas, las analogías,
aunque útiles en principio, terminan por ser enfadosas. El objeto más
general en el que se puede llevar a cabo r 1 cálculo se llama uariedad.
Es simplemente una superficie abstracta de dimensión arbitraria n.
8.4 DEFINICIÓN. Una variedad n-dimensional Al es un conjunto provisto de una colección 9? de cartas abstractas (funciones uno a uno
x: D ~M, donde D es un conjunto abierto de En) tal que
1) M está cubierta por las imágenes de las cartas ck la colección :Jl.
2) Para dos cartas cualesquiera x, y ele la colección
las funciones
compuestas y- 1 x y x- 1 y son euclidianamcnte clifercnciables (y están definidas en con juntos abiertos de En).
Por lo tanto, una superficie (definición 8.1) es lo mtsmo que una
variedad bidimensional. El espacio euclidiano En es una variedad n-climensional muy especial; su colección de cartas consiste solamente en la función
identidad.
Para que esta definición se acerque tanto como sea posible a la de
una superficie en E 3 , nos hemos alejado ligeramente de la definición
estándar ele variedad, en la que se suele poner como axioma el enunciado
de las funciones inversas x- 1 : x ( D) ~ D.
El cálculo de una variedad arbitraria ¡\[ de dimensión n se define de
la misma manera que en el caso especial, n = 2, de una superficie abstracta.
Se obtiPncn exactamente como antes las funciones difcrenciables, los
vectores tangentes, los campos vectoriales y los mapeos: sólo tenemos que
reemplazar i = 1, 2 por i = 1, 2, · · ·, n. Las formas diferenciales en una
variedad M tienen las mismas propiedades generales que en el caso n = 2,
que examinamos en las secciones 4, 5 y 6. Pero hay p-forinas para
O < p < n, de manera que, cuando la dimensión n de M es grande, la
situación se vuelve bastante complicada, y hace falta emplear técnicas más
complicadas y sutiles.
Siempre que aparece en las matemáticas el cálculo acompañado de
sus aplicaciones, también se encuentran las variedades, y las variedades
de dimensiones más altas resultan tener importancia en problemas (de
matemáticas tanto puras como aplicadas) que, en principio, sólo parecen
requerir ele las dimensiones 2 y 3. Por ej;mplo, describiremos a continua-
214
EL CÁLCULO EN UNA SUPERFICIE
i (p)
x,
E'
'\/'A ~-
;-W-'· .
X1
Figura 4.50
ción una variedad tetradimensional que ya ha aparecido, aunque en forma
implícita, en este mismo capítulo.
8.5 EJEMPLO. El haz tangente de una .wjJerficie. Si Jf es una superficie, sea T(A1) el conjunto de todos los vectores tangentes a Af en todos
los puntos de Af. (Para ser más concretos, pensaremos en Af como superficie en E\ pero igualmente Af podría ser una superficie abstracta o, en
efecto, una variedad de cualquier dimensión.) .\hora bien, b misma A1
tiene dimensión 2, y cada plano tangente Tp (Af) resultará tener también
dimensión 2, de manera que la dimensión de T (A1) resultará ser 4. Para
obtPncT la colección de cartas !1 con la cual el conjunto T(M) se conn~rtirá en variedad, deduciremos de cada c.wta x en Af una carta
en
x
T("\f). Si x: D-'> M, sea D el conjunto abicTto de E' que consta de
todos los puntos (p¡, jJe, p,, jJ,) para los que (jJ 1 , jJ") está en D. Sea a
continuación
x: D-+ T(M)
la función tal que
(En la figura 4.50, hemos identificado E~ con el plano x, \'e de E 4 para
trabajar tan bien como podamos en la dimensión 4. )
Por medio del ejercicio 3 de la sección 3 y de la demostración del
lema 3.6, no resulta difícil comprobar que 1) cada una de esas funciones
x es uno a uno, y, en consecuencia, una carta dentro de T ( lvf), en el
sentido de la definición 8.4, y 2) la colección fJ> de todas esas. cartas
satisface las dos condiciones de la definición 8.4. Por tanto, T(M) es
una variedad tetradimensional, que se llama haz tangente de lvf.
EJERCICIOS
l. Hágase ver que una superficie "H es no orientable si hay una curva
cerrada a: [0, 1]-'> Jvf y un campo vectorial Y en a tales que
a) Y y a' son linealmente independientes en cada punto.
b) Y(l) = -Y(O).
215
VARIEDADES
2. Establézcanse las propiedades siguientes del plano proyectivo -¡:
a) Si P: 2: --? ;r es la proyección, entonces cada vector tangente a
t es la imagen bajo P* de exactamente dos vectores tangentes a 2:
de la forma V¡¡ y ( -v) -po
b) 3S es compacto, conexo y no orientable.
(Indicación: En (a), aplíquese el ejercicio 5 de IV.5.) Aunque la
demostración es difícil, toda superficie compacta en E 3 es oi·ientable;
por tanto, :S no es difcomórfico con ninguna superficie en E'l.
3. Demuéstrese que el haz tangente (8.5) es una variedad. (Si x y y
son cartas traslapadas en M, encuéntrese una fórmula explícita de
y-lx.)
4. Si M es imagen de una sola carta x: E" --? lv!, hágase ver que el
haz tangente T(A1) es difeomórfico con E'.
S. (El plano de dos orígenes). Sea M e! conjunto de todos los pares
ordenados de números reales (u, v) y un punto adicional, el 0*. Sean
x y y las funciones que van de E 2 a M tales que
X
(U, V) =y (U, V)
=
(U, V)
Sl
(U, V)
=/= (0, 0) ,
pero
x(O,O) =O= (0,0)
y(O, O) =O*.
y
Demuéstrese que:
a) Las cartas abstractas x y y hacen ele Af una superficie.
b) Af es conexo.
e) La función F: M--? M es un mapeo, donde F(O) =O'' y F(O*)
O, aunque para los demás puntos ele 1H, F(p) = p.
Las superficies que son como ésta plantean problemas enfadosos;
las eliminamos si añadimos una hipótesis adicional al enunciado
de la definición 8.1: para cualesquiera puntos p =1= q de M existen
c;utas abstractas x y y en ~) tales que p está en x (D), q está en
y(E) y x(D) y y(E) no se intersectan (axioma de Ilaussdorff).
6. Sea V un campo vectorial en una superficie Af. tina curva a en lv!
es una curva integral de V cuando a'(t) = V(n;(t)) para todo t.
Por tanto, una curva integral tiene, en cada punto, la velocidad
que prescribe V. Si a(O) =p, decimos que a empieza en p.·
a) En el caso especial M = E 2 , hágase ver que la curva t --? ( a1 ( t) ,
a 2 (t)) es curva integral de V= /1 U1 + f2 U2 a partir de (a, b)
si y sólo si
a, (O) =a
y
{
a2(0) = b
216
EL C;\LCULO EN UNA SUPERFICIE
La teoría de las ecuaciones diferenciales nos predice que la solución
de estos sistemas es única.
b) Encuéntrese la curva integral de
en E 2
que arranca
renciales de
elementales.
para que el
del punto ( 1, -1). (1 ndicar:ión: Las ecuaciones clifeeste caso se pueden resoh,er por medio de• métodos
Empléense las constantes arbitrarias en la solución
punto de partida sea ( 1, - 1).)
7. Demuéstrese que todo campo vectorial V en una superficie Af tiene
una curva integral que parte de cualquier punto dado. (Indicación:
Tómese una carta x en Ji, con x (a, b) = p, y sea v el campo vectorial
en E 2 con la propiedad de que X: ( v) = V.)
8. Demuéstrese que toda superficie de re\'olución es difeomórfica o bien
a un toro, o bien a un cilindro circular. (De la misma manera, una
superficie de revolución aumentada -ejercicio 12 de IV.l- es dif eomórfica o bien a un plano, o bien a una esfera.)
e 9.
(Productos cartesianos). Si jl¡f y N son superficies, sea Af X N e]
conjunto de todos los pares ordenados (p, q) con p en Af y q en N.
Si x: D ~ 1\f y y: E~ N son cartas, sea D X E la región de E 4
compuesta de todos los puntos (u, v, u 1, v1), donde (u> v) está en
D, ( u 1 , v 1 ) está en E. Definamos a continuación x X y: D X E~
1\1 X N como
Demuéstrese que la colección fP de todas esas cartas abstractas hace
de M X N una variedad (de dimensión 4). M X N se llama producto
cartesiano de A1 y N.
El mismo esquema funciona para cualesquiera dos variedades;
por ejemplo, E 1 X E 1 es precisamente E 2 .
1O. Si M es una superficie abstracta, una inserción propia de M en E 3
es un mapeo regular y uno a uno F: M~ E 3 tal que la función
inversa F- 1 : F(Af) ~ ji¡J es continua. Demuéstrese que la imagen F(M)
de una inserción propia es una superficie en E 3 (definición 1.2)
y que es difeomórfica a .H.
Si F: Af ~ E 3 es simplemente regular, entonces F se llama inmersión ele lvf en E 3 , y la imagen F(Af) se llama a veces "superficie
inmersa", aunque no es nccesano que satisfaga los requisitos de la
definición 1.2.
RESUMEN
9
217
Resumen
En este capítulo, hemos avanzado a partir de la idea de superficie en E\
con la cual estamos familiarizados, hasta la idea general de variedad.
A continuación, vamos a invertir el proceso: una variedad n-dimensional
1\1 es un espacio que -cerca de cada uno de sus puntos- se parece
al espacio euclidiano En. Toda variedad tiene un cálculo, compuesto de
funciones diferenciables, vectores t:.mgentes, campos vectoriales, mapeos y
-por encima de todos estos elementos- las form:Js difertcnci:Jles. La variedad más simple de dimensión n es el mismo En. Una variedad biclimensional se llama superficie. Hay algunas superficies que apareccn en
E 3 , y otras que no aparecen. Toda esta teoría se desprende del cálculo
clemental al que estamos hnbituados, en el que se trabaja en la variedad
más sencilla de todas, a saber, la recta re:1l. Pero el cálculo de toda
\~:Jriedad tiene, en general, el mismo comportamiento.
CAPITULO
V
Operadores de forma
En el capítulo II nos valíamos de las funciones de curvatura y de torsión
de una curva en E 3 para medir su forma. Aquí consideraremos el problema
análogo de medida con respecto a las superficies. Resultará que la forma
de una superficie M en E 3 queda descrita a nivel infinitesimal por medio de
un determinado operador lineal S que se define en cada uno de los
planos tangentes de M. Como sucede con las curvas, la afirmación de que
dos superficies en E 3 tienen la misma forma significa simplemente que son
congruentes. Y, también como en las curvas, justificaremos nuestras mediciones infinitesimales al demostrar que dos superficies que tienen "los
mismos" operadores de forma son, en realidad, congruentes. Las invariantes algebraicas ( detem1inante, traza, · · ·) de sus operadores ele forma
tienen, de esta manera, significado geométrico en la superficie lvf. Investigaremos en detalle esta cuestión y encontraremos maneras eficientes de
calcular estas invariantes, de las que haremos la prueba en varias superficies interesantes desde el punto de vista geométrico.
A partir de aquí, la notación Af e E 3 significa que tenemos una superficie conexa M en E 3 , según se definió en el capítulo IV.
1
El operador de forma de M
e E3
Supongamos que Z es un campo vectorial euclidiano (definición 3.7 del
capítulo IV) en una superficie lvf en E 3 . Aunque Z se define solamente
en puntos de A1, la derivada CO\'ariante 'V ,,Z consnva su sentido ( capítulo II, sección 5) mientras tengamos que ves tangente a "H. Como es habitual.
'V rZ es la rapidez de variación ele Z en la dirección v, y hay dos maneras
principales de calcularla.
lvfétodo l. Sea a una cun'a en Af que time la velocidad inicial
= v. Sea Za la restricción de Z a a, es decir, el campo vectorial
t---+ Z (a(t)) en a (figura 5.1). Entonces
a' (O)
219
220
OPERADORES DE FORMA
t",Z
Figura 5.1
'VvZ = (Za)'(O)
donde la derivada es la que definimos en el capítulo II, sección 2.
A1étodo 2. Vamos a expresar Z en términos del campo natural de
sistemas de referencia de E 3 por medio de
Entonces
V' vZ = }; v[z¡]U.¡
donde la derivada direccional es la del capítulo IV, sección 3.
Se verifica con facilidad que los dos métodos llegan a resultados consistentes. Observemos que, aunque Z sea un campo vectorial tangente, la
derivada covariante V' vZ no tiene que ser necesariamente tangente a A1.
Del teorema 7.5 del capítulo IV se desprende inmediatamente que
si A1 es superficie orientable de E 3 , entonces existe un campo vectorial
normal y unitario U en A1. De hecho, si Z es un campo vectorial que no se
anula y además es normal, entonces U= Z/11 Z 11 sigue siendo normal, y
tiene longitud unitaria. Puesto que aquí suponemos que M es conexa, hay
exactamente dos campos vectoriales normales y unitarios U y -U definidos en la totalidad de la superficie A1. Pero aunque M no sea orientable,
seguimos teniendo acceso a normales unitarias U y -U en alguna" vecindad
de cada punto p de A1 (véanse los ejercicios del capítulo IV, sección 7).
Ya estamos en condiciones de encontrar una medida matemática de
la forma ele una superficie en E 3 .
1.1 DEFINICIÓN. Si p es un punto de M, entonces, para cada vector
tangente v a M en p, sea
EL OPERADOR DE FORMA DE .fl.f
e
E3
221
donde U es un campo vectorial normal y unitario en una vecindad p
ele .M. Sv se llama operador de forma de },1 en p (que se deriva de U) .t
(Fig. 5.2.)
El plano tangente de ,\1 en cualquier punto q consiste en todos los
wctores euclidianos que son ortogonales a U ( q) . Por lo tanto, la rapidez
~b~.
-.....íl. u
'
Figura 5.2
de variación \7 vU de U en la dirección v nos dice la manera en c¡ue los
planos tangentes de A1 varían en la dirección v; esto constituye una descripción infinitesimal de la manera en que se curva la misma M en E'3 •
Obsérvese c1ue si reemplazamos U por - lJ, entonces Sp cambia a -SI'"
1.2 LEMA. En cada punto p de Af
operador lineal
e
E 3 , el operador de forma es un
en el plano tangente de M en p.
Demostración. En la definición 1.1, U es un campo vectorial unitario,
de manera que U·U = l. Por tanto, según una propiedad leibnizniana de
las derivadas covariantes,
O= v[U·UJ = 2\7vU·U(p) = -2Sp(v)•U(p)
donde v es tangente a Af en p. Puesto que U es también campo vectorial
normal, entendemos que Sv(v) es tangente a .il.1 en p. Por lo tanto, Sp es
una función que va de Tv(M) a Tv(M). (Es con el objeto de recalcar
esto que decimos "operador" en lugar de "transformación".)
La line:tlidad de Sv es consecuencia de una propiedad de linealidad
que poseen las derivadas covariantes.
-'Vav1bwU
aSp (v)
+
=
-(a\7vU
bSp(w).
+
b\7wU)
1
t El signo menos que se ha agregado de manera artificial dentro de esta definición reducirá notablemente la cantidad total de signos negativos que necesitaremos
más adelante.
222
OPERADORES DE FORMA
En cada punto p de A1 C E'3 existen, en realidad, dos operadores ele
forma -+-S¡¡, que se derivan ele las dos normales unitarias ±U enea ele p.
Nos referiremos a la totalidad de ellos, colecti\·amente, como el operador
dP forma S de M. Por lo tanto, si no se E'Spccifica b elección ele normal
unitaria. hay una ambigüedad ele signo (ele efecto relati\·amcntc nulo).
1.3 EJEMPLO. Operadores ele forma de algunas superficies de E 3 .
1) Sea :S la esfera de radio r compuesta ele todos los puntos p de t 3 en los
que 11 p ]1 = r. Sea U la normal "hacia afuera'' en
:S. Ahora bien, a medida que U se aleja ele cualquier punto p en la dirección v, es evidente que u·
se tambalea hacia adelante en la dirección exacta
del mismo v (figura 5.3). Por tanto, S ( v) ha de
ser de la fonna - cv.
De hecho, al emplear los gradientes del ejemplo
3.9 del capítulo IV, encontramos
U= l
r
2:
Y;Ui.
Figura 5.3
Pero, entonces,
r
Por consiguiente, tenemos que S ( v) = - v j r para todo v. De manera que el
operador de forma S es simplemente la multiplicación escalar por -ljr.
Esta uniformidad de S nos refleja el hecho ele la redondez de las esferas:
Se flexionan de la misma manera en todas las direcciones y en todos los
puntos.
2) Sea P un plano en E 3 • Un campo vectorial normal y unitario U
en P es evidentemente jJaralelo en E 3 (coordenadas euclidianas constantes). (Figura 5.4.) En consecuencia,
S(v)
=
-yrJ.I=O
para todos los vectores tangentes v a P. Por lo tanto, el operador de forma
es idénticamente cero; esto era de esperarse, puesto que los plan_os no se
flexionan en ;cbsoluto.
3) Sea e el cilindro circular X~ + y'" = r" en E 3 • En cualquier punto
p de e, sean e 1 y Ce vectores tangentes unitarios, siendo e 1 tangente al
rayo del cilindro que pasa por p y e" tangente a b circunferencia de sección transverso l.
L'saremos la normal hacia afuera, U, como se indica en la figura 5.5.
Ahora bien, cuando U se mueve a partir de p en la dirección e 1 , es
paralelo a sí mismo, como si anduviera por un plano; en consecuencia,
EL OPERADOR DE FORMA DE
1W C E·'
223
S ( e 1 ) = O. Cuando U se mueve en la dirección e 2 , se inclina siempre
hacia adelante, como si anduviera por una esfera de radio r,· por consiguiente, S ( e 2 ) = - ecf r. De esta manera, S describe la forma "plana en
parte, y en parte redonda'· de un cilindro.
4) La silla de montar Af: z = Yy. Por el momento, no inn~stigarcrnos S
más que en el punto p = (0, O, O) en iH. Puesto que los ejes de las x y
u
¡
Figura 5.4
Figura 5.5
de las y en E 3 están en M, los vectores u 1 = ( 1, O, O) y u 2 = (0, 1, O) son
tangentes a M en p. Nos valdremos de la normal unitaria "hacia arriba",
U, que, en p, es (0, O, 1). A lo largo del eje de las x, U es siempre ortogonal al eje de las x, y, a medida que avanzamos en la dirección u 1 , U se
z
Figura 5.6
columpia de izquierda a derecha (figura 5.6). De hecho, por medio de
cálculos rutinarios (ejercicio 3), vemos que \1 1nU = -u 2 . Encontramos
'VucU = -u 1 de la misma manera.
Por lo tanto, el operador de forma de A1 en p está dado por la fórmula
224
OPERADORES DE FORMA
Estos ejemplos clarifican la analogía que existe entre el operador de
forma de una superficie y la curvatura y la torsión de una curva. En el
caso de la curva, no hay más que una dirección en que avanzar, y K y •
mielen la rapidez de variación de los campos vectoriales unitarios T y B
(y, en consecuencia, N). En una superficie, sólo hay un campo vectorial
unitario que está intrínsecamente determinado: el campo normal y unitario U. Además, en cada punto, hay aquí todo un plano ck direcciones
en que se puede mover U, de manera que las rapideces ele variación ele U
no se mielen numéricamente, sino por medio ele operadores lineales S.
1.4 LEMA. En cada punto p ele 111
e
E 3 , el operador ele forma
es un operador lineal simétrico; esto significa que
S(v) •w
=
S(w) •v
para cualquier par ele vectores tangentes a lvf en p.
Pospondremos la demostración ele esta afirmación decisiva hasta la
sección 4, donde vendrá como resultado natural en el curso ele los cálculos
generales.
Desde el punto ele vista del álgebra lineal, un operador lineal simétrico
en un espacio \·ectorial bidimensional es un objeto de lo más simple. En
un operador de fonna, tendremos que sus vectores y valores característicos, su traza y determinante, resultan tener un sentido geométrico ele
importancia primordial en la superficie 111 e E".
EJERCICIOS
l. Sea a una curva en j\;f e E 3 • Si U es un;¡ normal unitaria de M restringida a la curva a, hágase ver que S(a') = -U'.
2. Consideremos la superficie 111: z =
f (x, y),
donde
f(O, O) = fx(O, O) = fv(O, O) = O.
(Los subíndices indican derivadas parciales.) Demuéstrese que
a) Los vectores U 1 = UI(O) y llc = Uc(O) son tangentes a 111 en el
origen O, y que
U_ ~fxUl- fuU2 + U"
\rl + f,/ + ~~~-es campo vectorial normal y unitario en M.
b) S(u,) = fxr(O, O)ul + fxy(O, O)u 2
S(u2) = fvx(O, O)n1 + fvv(O, O)u2.
EL oPERADoR DE FORMA nE
M
e
E3
225
(Nota: la raíz cuadrada del denominador no resulta ser aquí un problema real gracias al carácter especial de f en (0, O). En general, el
cálculo directo de S es difícil, y, en la sección 4, estableceremos maner;:¡s inclin~ctas de llegar a 61.)
3.
(Continuación) . En cada caso, exprésese S ( au 1 + bu e) en términos
de u 1 y ue, y detem1ínese el rango de S en O (el rango de S es la dimensión de la imagen ele S: O, 1 ó 2) .
•
a) z = xy.
e) z = (x + y)2.
ú) z = 2x" + y".
d) z = X)' 2 .
4. Sea M una superficie en E 3 orientada por un campo vectorial normal
y unitario
Entonces el mapeo de eauss e: M-;.::::; de lvl transforma cada punto
p en el punto (gt(p), g 2 (p), g.,(p)) ele la esfera unitaria¡_ Desde
el punto ele vista gráfico, se trata ele mover U ( p) hacia el origen por
medio de un movimiento paralelo; allí, apunta hacia e(p) (figura 5.7).
U(p)
G
-------.....
Figura 5.7
e
Por lo tanto,
describe completamente las vueltas que da U cuando
viaja por .M.
En cada una de las superficies siguientes, descríbase la imagen
e(Al) del mapeo de Gauss en la esfera ¿; (utilícese cualquier!l ele las
dos normales) :
a) El cilindro, x 2 + y 2 = r 2 •
+y<
b) El cono, z = y ~~2
e) El plano, x + y + z
d) La esfera, (x- 1) 2
=
O.
+y"+ (z + 2)" =l.
5. Sea e: T-) ¡el mapeo ele Gauss del toro T (como vimos en IV.2.6)
derivado ele su normal unitaria hacia afuera U. ¿Cuáles son las curvas
226
OPERADORES DE FORMA
e
imagen bajo
de los meridianos y paralelos de T? ¿Qué puntos de ¡
son imagen de exactamente dos puntos de T?
6. Sea e: M~¡ el mapeo de Gauss de la silla de montar Af: z = xy que
se deriva de la normal unitaria 2, según se obtuvo en el ejercicio 2.
¿Cuál es la imagen bajo e de una de las rectas, y constante, ele i\1?
¿Cuánto de la esfera queda cubierto por la totalidad de la 1magen
C(M)?
7. Hágase ver que el operador de forma de 1i1 es (menos) la deri\'ada
de su mapeo de Gauss: Si S y e: Af ~ ::S se derivan ambos ele U, entonces S(v) y -e*(v) son paralelos para todo vector tangente va M.
8. Una superficie orientable tiene dos mapeos ele Gauss que se derivan
ele sus dos normales unitarias. Hágase ver que difieren tan sólo en el
mapeo antípoda ele ¡ (ejercicio 5 de IV.5). Defínase un mapeo del tipo
de Gauss para una superficie no orientable en E".
9. Si V es campo vectorial tangente en Af (con normal unitaria U), entonces, por el principio de operar punto por punto, S (V) es el campo
vectorial tangente en J1 cuyo valor en cada punto p es S P ( V ( p) ) .
Hágase ver que
S(V)•W = \7vW·U.
Dedúzcase que la simetría de S equivale a afirmar que el corchete
[V, W] = \7vW- \7nV
ele dos campos vectoriales tangentes es de nuevo un campo vectorial
tangente.
2
Curvatura normal
A lo largo ele esta sección, vamos a estudiar una regwn de Af e E 3 , a la
que impartimos orientación por medio de la elección de un campo vectorial normal y unitario U, y emplearemos el operador de forma S que
se deriva de U.
La forma de una superficie en E 3 influye en la forma de las curvas en M.
2.1 LEMA. Si a es una curva en A1
e E\ entonces
a"•U = S(rx.')•a'.
Demostración. Puesto que a está en Af, su velocidad a' es s1empre
tangrnte a )\[. Por lo tanto, a'•U = O, donde restringimos, como hacíamos
en la sección 1, U a la curva a. La diferenciación resulta en
CURVATURA NORMAL
227
u
Figura 5.8
c/'·U
+
c/•U'
Pero, por b sección 1, sabemos que S(a')
a"•[!
=
-[]'•a'
O.
=
=
-U'. En consecuenna,
= S(o:')•a'.
1
He aquí la interpretación gcom6trica: en cada punto, a"•U es la
componente normal a la superficie ,\1 de la aceleración a" (figura 5.8).
El lema nos cnscií:J. que esta componente dependerá tan sólo de h velocidad a' y el operador de forma de Af. Por consiguiente, todas las curvas
en 111 con velocidad dada v en el punto p tendrán la misma cmn jwnente
normal de la aceleración en p, a saber, S ( v) •v. Esta es la componente de
la aceleración que se ven obligadas a tener debido a la manera en que Af
se flexiona en E".
Es así corno, si estandarizamos v al reducirlo a un vector unitario u,
obtenemos la medida en que se flexiona Af en la dirección u.
2.2
Sea u un vector unitario tangente a 1U C E 3 en un
punto p. Entonces, el número k (u) = S (u) •u se llama curvatura normal
de Af en la dirección u.
DEFINICIÓN.
Para dar precisión al término dirección, vamos a definir una dirección
tangente a llf en p como un subespacio unidimensional L de Tp(llf), es
decir, una recta que pase por el vector cero (que se ubica, para facilitar
\~
Figura 5.9
la visión intuitiva, en p) (figura 5.9). CuZLlquier vector tangente distinto
de cero en p determina una dirección L, pero preferiremos usar uno de
los dos vectores unitarios -+-u en L. Obsérvese que
k (u) = S (u) "ll = S ( -u H -u) = k ( -u) .
228
OPERADORES DE FORMA
Figura 5.1 O
Por lo tanto, aunque evaluamos k en vectores unitarios, es, en realidad,
una función ele valores reales definida en el con junto de todas las direcciones tangentes a Af.
A partir ele un vector t;mgente a J í en p quE' sea unitario, sea una
curva (ele rapidez unitaria) en ¡\f con velocicbd inicial a' (O) = u. Por
medio del aparato de Frenet de o:, el lema ~mterior nos dice que
k(u) = S(u)•u = a"(O)•U(p) = K(O)N(O)·U(p)
=
K (
0)
COS {}.
De esta manera, la cun·atura normal ele JI en la dirección u es K(O) cos {}.
donde K (O) es la curvatura de a en a (O) = p, y {}· es el úngulo que forma
la normal principal N(O) con la normal de la superficie, como se ve en la
figura 5.1 O.
A partir de u, tenemos una manera natural de ekgir la curva con el
fin de que{} sea O o ''· De hecho, si Pes el plano que determina u y U (p),
entonces P corta a /VI (en las inmediaciones de p) en una curva a que
se llama sección normal ele Jvf en la dirección u. Si damos una parametrizZtción ele rapidez unitaria a a, con a'(O) =u, se ve con facilidad que
N(O) = +U(p). (a"(O) = K(O)N(O) es ortogonal a a'(O)) =u, y tangente a P.) Por tanto, en una sección normal en la dirección u, teneII!OS (figura 5.11)
k(uJ
=
Ka(O)N(O)•U(p)
=
+K,,(O).
Por lo tanto, es posible hacer una estimación plausible ele las curvaturas
normales en diversas direcciones de una superficie M C E" por mC'dio ele
representaciones de los aspectos de las secciones normales correspondientes. Y la explicación anterior le da sentido geométrico al signo de la curvatura normal k(u) (en relación con nue;,tra elección fija de U).
229
CURVATURA NORMAL
1) Si k (u) > O, entonces N (O) = U ( p), de manera que la sección
normal a se flexiona hacia U(p) en p (figura 5.12).
dirección u, la suprrficic lvf se flexiona hacia U ( p) .
U(p)
p
figura 5.11
2) Si k(u) <O, entonces N(O) = -U(p), y la sección normal a se
flexiona de tal manera que se aleja de U(p) en p. Por consiguiente, en
la dirección u, lvf se flexiona de manera que se aleja de U(p) (figura 5.13).
3) Si k(nJ =O, entonces K,(O) =O (la e:-.presión N(O) no está definida aquí). La sección normal a no da vuelta en a(O) = p. No podemos
~01:
p
Figura 5.12
u
Figura 5.13
concluir que no haya flexión de M en la dirección u, puesto que K podría
ser cero solamente en a (O) = p. Pero esto nos dice que su tasa de flexión
es desacostumbradamente pequeña.
En un punto fijo p y en direcciones diferentes, la superficie se puede
flexionar de maneras muy distintas. Por ejemplo, consideremos la silla
de montar z = xy del Pjemplo 1.3. Si identificamos el plano tangente de
A1 en p = (0, O, O) con el plano xy de E 3 , entonces se ve claramente que
la curvatura normal en la dirección de los ejes de las x y de las y es cero,
230
OPERADORES DE FORMA
puesto que las secciones normales son rectas. Sin embargo, en la figura 5.6
se ve que, en la dirección tangente que nos da la recta y = x, la curvatura
normal es positiva, pues la sección normal es una parábola que se curva
hacia arriba. (U(p) = (0, O, 1) es "hacia arriba".) Pero en la dirección
de la recta y = -x, la curvatura normal es negativa, puesto que esta otra
parábola se curva hacia abajo.
U(p)
E'
Figura 5.14
A continuación, vamos a fijar un punto p de A1 e E:' para imaginar
que un vector unitario u tangente en p gira de tal modo que genera la
circunferencia unitaria en el plano Tp(M). A partir de las secciones normales correspondientes, obtenemos un cuadro móvil ele la manera en
que A1 se flexiona en todas las direcciones en p (figura .5.14).
2.3 DEFINICIÓN. Sea p un punto ele A1 e E", los valores máximo y
mínimo ele la curvatura normal k(u) de M en p se llaman curvaturas
principales de M en p, y se denotan por k 1 y k 2 • LDs direcciones en que
ocurren estos valores extremos se IlamDn direcciones principales de A1 en
p. Los vectores unitarios que están en estas direcciones se llaman vectores
principales ele M en p.
Por medio del procedimiento ele la sección normal que acabamos ele
explicar, suele ser bastDnte fácil escoger las direcciones de flexión máxima
y ele flexión mínima. Por ejemplo, si empleamos la normal hacia ;:¡fuera
(U) en un cilindro circular C, entonces las secciones normales ,se alejan
todDs de U, ele mDnera que k (u) < O. Además, se comprende con bastante
clmid<1d que el valor máximo kt = O ocurrirá solamente en la dirección
ele uno de los r;:¡yos, y que el vDlor mínimo k 2 < O ocurrirá solamente en
la dirección tangente a una sección trDnsversal, como vemos en la figura 5.15.
Tenemos un cDso especial e interesante en puntos p en los que k 1 = k 2.
Puesto que allí las curvaturas máxima y mínima son iguales, se concluye
.que k (u) es constante: M se flexiona igualmente en todas las direcciones
en p (y todas bs direcciones son allí principales).
231
CURVATURA NORMAL
Figura 5.15
2.4 DEFINICIÓN. Un punto p de M e E 3 es umbilical cuando la curvatura normal k(u) es constante en todos los vectores unitarios u tangentes en p.
Por ejemplo, lo que encontramos en el inciso ( 1) del ejemplo 1.3 era
que todo punto de la esfera ::8 es umbilical, con k 1 = k 2 = - 1/ r.
2.5 TEOREMA. 1) Si p es punto umbilical de M e E 3 , entonces el
operador de forma S en p es simplemente la multiplicación escalar por
k= k, = k2.
2) Si p es punto no umbilical, k1 =/= k 2 , entonces hay exactamente dos
direcciones principales, y son ortogonales. Además, si e 1 y e 2 son vectores
principales en estas direcciones, entonces
Con brevedad, las curvaturas principales de Jvi en p son los valores
característicos de S, y los vectores principales de A1 en p son los vectores característicos de S.
Demostración. Supongamos que k toma el valor máximo k1 en e1,
de manera que
Sea e 2 un simple vector unitario y tangente, ortogonal a e 1 (veremos en
seguida que es también vector principal) .
Si u es cualquier vector unitario tangente en p, ponemos
u= u({}) = ce1
+ se 2
,
donde e = cos {}, s = sen{} (figura 5.16). Por lo tanto, la curvatura normal
k en p se convierte en una función de la recta real: k ({}) = k (u ({}) ) .
1.
-••• aft.-ir~a
232
OPERADORES DE FORMA
Para 1 < i, j < 2, sea Sii el número S ( ei) •ei. Observemos que S11
y que, por la simetría del operador de forma, Sre = S21. Calcnbmos
= k1,
( 1)
En consecuencia,
(2)
Si {} = O, entonces e = 1 y s = O, de m::mera que
como, por hipótesis, k ({}) es máximo en {} = O,
(dkjd{}) (O) =O. Se desprende inmediatamente de (2)
Puesto que e 1 , e 2 es base ortonormal de Tp ( Af),
desarrollo ortonormal que
u(O) =
e1. Es así
de manera que
que Sr"= O.
deducimos por el
(3)
Ahora bien, s1 p es umbilical, entonces Sce = k(e 2 ) es lo mismo que
S11 = k(e 1 ) = k 1 , de manera que (3) nos enseña que S es la multiplicación escalar por k 1 = k2.
Si pes no umbilical, al recordar la igualdad (1), vemos que
(4)
Puesto que k 1 es el valor máximo de k ({}), y k ({}) es
no constante, tenemos que k 1 > S cz· Pero, entonces, (4) nos
a) el valor máximo k 1 sólo se toma cuando e= -+-1, s =O,
dirección e 1 , y b) el valor mínimo k 2 es S 22 , y sólo se toma
s = -+-1, es decir, en la dirección e 2 . Esto nos demuestra el
ciado del teorema, pues aquí se lee ( 3) como
aquí un valor
hace ver que:
es decir, en la
cuando e = O,
segundo enun-
1
En la demostración anterior, está contenida la fórmula ele Euler ele la
curvatura normal de M en todas las direcciones en p.
2.6 CoROLARIO. Sean k 1 , ke y e 1 , e 2 las curvaturas principales y los
vectores principales ele Af C E 3 en p. Entonces, si u = cos 1}e1 + sen 1}e2 ,
la curvatura normal ele .M en la dirección u es (figura 5.16)
He aquí otra manera de ver que las curvaturas principales k 1 y k 2
controlan la forma ele M en las cercanías de un punto arbitrario p. Puesto
233
CURVATURA NORMAL
que la posición de ,\1 en E" carece de importancia,_podemos suponer que
1) p está en el origen E"; 2) el plano tangente T¡¡ (.\!) es el plano xy
de E\ y 3) que los ejes de las :-: y de las y son las direcciones principales.
Cerca de p, se puede expresar lvf como 1\1: z = f (x, y), como vemos en la
figura 5.17, y nuestra idea es construir una aproximación de A1 en las
inmrdi:-~cionf's de p por medio ele solamf'ntc los términos hasta el cuadrático
en el desarrollo de Taylor de la función f. Ahora bien 1) y 2) implican
z
X
Figuro 5.' 6
Figura 5.17
¡o = fx 0 = f/ = O,
donde los subíndices indican derivadas parciales, y el
índice cero denota la evaluación en x = O, y = O. Por lo tanto, la aproximación cuadrática de f en las inmediaciones ele (0, O) se reduce a
x2
f( x ) y) ,....., J.(¡o
2
,t:/;
+ 2ro
J
J•!J
xy
+ ¡o y2).
lf:f
En el ejercicio 2 ele la sección 1 Yimos que, para los vectores tangentes
U1
= ( 1, O, O)
y
Uc
= (0, 1, O)
en p =O
S(uJ
-'V,", u = f~J:u1
S(uJ
- 'YuP
= f~Yul
+
+
f~uu2
f~Yu".
De acuerdo con la condición ( 3) anterior, u t y u 2 son vectores jJrincijJales, de manera que se desprende del teorema 2.5 que k 1 = ¡ox.r , k.,~ = ¡o1/!J ,
y~~"= O.
Si substituimos estos valores en la aproximación cuadrática ele f, llegamos
a la conclusión de que la .forma de .H en las inmediaciones de p es ajnoximadamente igual a la de la sujJerfiO:e
en las inmediaciones de O. i1 se llama ajhoximación cuadrática de A1
cerca de p. Constituye la analogía de las aproximaciones de Frenet a
una curva para las superficies..
234
OPERADORES DE FORMA
Desde la definición 2.2 hasta el corolario 2.6 hemos imTstigaclo la
geometría de ¡\J e E'1 en las inmediaciones de uno ele sus puntos, p.
Estos resultados se aplican, así, simultáneamente a todos los puntos de la
región nicntada O en que, por nuestra suposición inicial, la normal
unitaria U está definida. En particular, entonces, hemos definido, de hecho,
funciones de curvatura principal k 1 y k" en O. En cada punto p de (),
ki(p) y k 2 (p) son las curvaturas principales ele M en p. ImistirndS en que
estas funciones se definen únicamente "módulo el signo": Si U se reemplaza
por -U, se convierten en - k 1 y -k".
EJERCICIOS
l. Aplíquense los resultados del ejemplo 1.3 para encontrar las curvaturas
principales y los vectores principales ele
a) El cilindro, en cada uno ele sus puntos.
b) La silla ele montar, en el ongen.
2. Si v es un vector tangente distinto ele cero (no necesariamente de
longitud unitaria), hágase ver que la curvatura normal ele i\1 en la
dirección determinada por v es k (v) = S (v) •v j v•v.
3. Para cada entero n > 2, sean an la curva t ~ ( r cos t, r sen t, +tn)
en el cilindro ~1: x 2 + y" = r 2 • Todas estas curvas tienen la misma
velocidad en t = O; compruébese el lema 2.1 al hacer ver que todas
tienen la misma componente normal ele la aceleración en t = O.
4. En cada una ele las superficies siguientes, encuéntrese la aproximación
cuadrática en las proximidades del origen:
a) z = cxp ( x 2 + y 2 ) - l.
b) z = log cos x - log cos ~'·
e) z = (.y+ 3y) 3 •
5. Justifíquese el primer enunciado ele la demostración del teorema 2.5:
Hágase ver que k tiene un valor máximo.
3
Curvatura gaussiana
En la sección anterior, descubrimos el significado geométrico de los valores
y vectores característicos del operador ele forma. A continuación, examinaremos su traza y su determinante.
3.1 DEFINICIÓN. La curvatura gaussiana de M e E 3 es la función en
M y ele valores reales K = clet S. De manera explícita, tenemos para cada
CURVATURA GAUSSIANA
235
punto p de A1, que la cmTatura gaussiana K (p) de A1 en p es el determinante del operador de forma S ele 1\1 en p.
La curz•atura media ele Al C E 3 es la función 1\f = } traza S. Las
curvaturas gaussiana y media se expresan en términos de la curvatura
principal por medio del
Demostración. E! determinante (y también la traza) ele un
lineal se puede definir como el valor común del determinante (y
de todas sus matrices. Si e 1 y c 2 son vectores principales en un
entonces, según el teorema 2.5, tenemos que S(e1) = k1(p)e1 y
k e (p) e 2 . Por tanto, la matriz de S en p con respecto a e 1 , e 2 es
operador
la traza)
punto p,
S(e 2 )
De aquí se desprende inmediatamente el resultado que buscamos.
1
Hay una propiedad significativa de la curvatura gaussiana: Es independiente de la elección de la normal unitaria U. Si cambiarnos U por
-U, entonces cambian los signos de tanto k 1 como k e, de manera que no
hay alteración en el valor ele K = kJ 2 • Es evidente que no sucede lo
mismo con la curvatura media H = (k 1 + k 2 ) /2, que tiene la misma
ambigüedad de las mismas curyaturas principales.
Por el método de la sección normal ele la sección 2 podemos determinar, mediante la inspección, el aspecto aproximado de las curvaturas
principales de M en cada punto. En consecuencia, nos damos una idea
plausible de lo que es la curvatura gaussiana K = k 1 k 2 , en cada punto
p, con sólo mirar la superficie A1. En particular, es frecuente que podamos
determinar el signo de K (p) ; este signo tiene un significado geométrico
importante, que vamos a ejemplificar a continuación.
3.3
CoMENTARIO.
El signo de la curvatura gaussiana en un jJUnto p.
1) Positivo. Si K(p) >O, entonces el lema 3.2 nos enseñ9- que
curvaturas principales k 1 (p) y k 2 (p) tienen el mismo signo. Por
corolario 2.6, o bien k (u) > O para todos los vectores unitarios u en
o bien k(u) <O. Por lo tanto, A1 se flexiona de manera que se aleja de
plano tangente Tp(M) en todas las direcciones en p (figura 5.18).
La aproximación cuadrática de A! en las proximidades de p es
paraboloide
las
el
p,
su
el
236
OPERADORES DE FORMA
U(p)
U(p)
Figura 5.1 8
Fi(;ura 5.19
2) N egatiuo. Si K ( p) < O, entonces, de acuerdo con el km a 3.2, las
curvaturas principales k, (p) y k 2 (p) son de signos opuestos. Por lo tanto,
la aproximación cuadrática de A1 en las proximidades de p es un hiperboloide, ele manera que 1\1 también tiene forma de silla ele montar en
las proximidades de p (figura .'i.19).
3) Cero. Si K ( p) = O, entonces, por el lema 3.2, tenrmos dos casos:
a) Sólo es cero una ele las curvaturas principales; tomemos concretamente
o,
k2 (p)
=
O
b) Ambas cun·aturas principales son cero:
En el caso a), la aproximación cuadrática es el cilindro 2z = k 1 ( p) x",
de manera que 1\f tiene esa forma en las cercanías de p (figura 5.20).
En el caso b), la aproximación cuadrática se reduce simplemente al
plano z = O, de manera que no tenemos aquí información acerca ele la
forma ele 1\I en las cercanías ele p.
Un toro de revolución T constituye un buen ejemplo ele los casos
diferentes que acabamos de describir. En los puntos de la mitad exterior ()
de T, el toro se flexiona ele manera que se aleja de su plano tangente, como
se ve en la figura 5.21; en consecuencia, K > O en (). Pero, cerca ele cada
---1 l=:;j
U(p)
r
,-¡-
\1/
\.L.--~
.
/.
---
e¡
Figura 5.20
e2
k¡(p)
>o
o
k2(p) =
~
~
Figura 5.21
CURVATURA GAUSSIANA
237
Fi:¡ura 5.22
punto p de la mitad interior S, T tiene forma de silla ck montar, y corta
a Tp ( i\1). En consccurncia, K
O en !].
Cerca de cada punto en las dos circunferencias (superior e inferior)
que separan a O y !1, el toro tiene forma llana; en comccueneia, E. = O
en esos puntos. (En la SPcción 6 haremos b comprobación cuantitativa
de estos rcsult;1elos cualitati'.·os.)
En el caso 3 ( b) de antes, donde l;:¡s dos curvaturas prmc:palcs se anuLm,
p se lbma punto llano ele Al. (En el toro no hay puntos de planicie.)
Por ejemplo, el punto central p ele un~1 silla de montar de mono, que concretamente puede ser
<
M: z = .\(x
+ v'§y)
(x- y3y),
es de planicie. En este punto concurren tres montes y tres valles, como
se ve en la figura 5.22. Por lo tanto, p tiene r¡ue ser punto de planicie
de ,~1; la forma c!e M rn bs cercanías ele p es d( 1nasiado complicada para
que se cumpla cualqnic!·a cie las otr:1s tres posibilidades que vimos en el
comentario 3.3.
V:m1os a considerar algunas maneras de calcular las cup;aturas gaussiana y media.
3.4 LE~IA. Si v v w son vectores tangentPs en un punto p de Af C E",
y si son linealmente independientes, entonces
S(v) X S(w) = K(p)v X w
S(v) X w + v X S(w)
=
2H(p)v X w.
Demostración. Pueno que v, w es base del plano tangente T¡¡ (i'v!),
podemos escribir
S(..-)
~=
S(w)
=
+ bw
cv + dw.
av
238
OPERADORES DE FORMA
Por consiguiente,
es la matriz de S con respecto a la base v, w. En consecuencia,
K(p) = detS = ad- be
JI(p) =}
tr~1zaS
=
J (a+
d)•.
Por medio de las propiedades estándar del producto vectorial, calculamos:
S(v) X S(w)
(av
+
bw) X (cv
( ad - be) v X w
+
=
dw)
K ( p) v X w
1
y, en forma análoga, obtenemos la fórmula de H(p).
Por lo tanto, si V y TY son campos vectoriales tangentes que son linPalmente independientes en cada punto de una región orientada, tenemos
las ecuaciones ele campos vectoriales
S(V) X S(W) =K V X W
S(V) X W +V X S(TV)
2H V X W.
=
Podemos resolverlas para K y H al formar el producto escalar ele cada
miembro con rl campo vectorial normal V X W, para aplicar la ic!entic!acl
ele Lagrange (ejercicio 61. A continuación, obtenemos
SV•V SV•W
SW•V SW·Hl
K=---V•V V·W
1
!
H =
SV·V
, W·V
1
SV·TV
W•TV
1
W·V
2
W•W
1
V•V
- -+- SW•V
------
1
1
1
1
V•W 1
SW•W!
--~----~
V•V
V•W
W·V
W·W i
1
(Los denominadores nunezc se anulan, puesto que la independencia de
V y W equivale a que (V X W) • (V X W) > O. En particular, las funciones K y H son diferenciables.
Una vez que conocemos K y H, resulta sencillo determinar k 1 y k2.
3.5 CoROLARIO. En una región orientada () en A1, las funciones de
curvatura principal son
k,, k2 = H ±
V ll 2
-
K.
Demostración. Para verificar la fórmula, es suficiente substituir los
valores
239
CURVATURA GAUSSIANA
para observar que
l-:1 2
-
T/
J'>..
= i~-+____15_~)~ - !· l. = ( kl - k2)
4
Cl""
4
2
1
Se puede hacer una deducción más clara (ejercicio 4) por medio del polinomio característico de S.
Esta fórmula no nos dice más que k 1 y k" son funciones continuas en
(); no es necesario que sean cliferenciables, puesto que la funció•n raíz
cuadrada tiene mal comportamiento en el cero. La iclentidacl ele la. demostración nos enseña que IP - K es cero solamente en los puntos umbilicales; por lo tanto, k 1 y k" son diferenciables en cualquier región orientada
que esté libre de jmntos umbilicales.
U na manera natural de distinguir las superficies ele tipo especial en
E" consiste en lwcer restricciones acerca de las curYaturas gaussiana y
media.
3.6 DEFINICIÓN. Una superficie A1 en E 3 es llana cuando su curvatura gaussiana es cero, y es mínima cuando su curvatura media es cero.
Como es ele esperarse, un plano resulta ser llano, pues vimos en el
ejemplo 1.3 que todos sus operadores de forma eran cero; por lo tanto,
K = clet S = O. En un cilindro circular, el inciso 3 del ejemplo 1.3 nos
enseiía que S es singular en cada punto p, y esto significa que tiene rango
menor que la dimensión del plano tangente 7'1, (Af). Por lo tanto, aunque
S nunca se anula, su determinante siempre es cero, por lo cual concluirnos
que los cilindros también son llanos. La terminología parece un tanto
rara al principio, pues la Zlplicamos a una superficie que se curva de
manera obvia, pero quedará ampliamcnte justificada en nuestro trabajo
posterior.
Observemos que las superficies mínimas ticnen curvatura gaussiana
K< O, puesto que si JI= (k 1 + k 2 ) /2, entonces k 1 = -k 2 y, en consecuencia, K = k 1 k" :<=::::O.
Otra clase notable de supcrficies está constituida por las que tienen
curvatura gaussiana constante. Como ya dijimos, el ejemplo 1 .3 nos hizo
ver que una csfera ele radio r tiene k 1 = k" = 1/ r (donde U va hacia
afuera). Por lo tanto, la esfera :S tiene curvatura constante y positiva
K = 1 : a medida que la esfera es menor, tiene curvatura mayor.
Encontraremos muchos ejemplos de estos cliverc;os tipos de superficie
en el material que nos queda por estudiar en este c:1pítulo.
EJERCICIOS
1. Hágase ver que no hay puntos umbilicales en un:1 superficie en la que
K < O, y, que si K < O, los puntos umbilicales son puntos de planicie.
240
OPERADORES DE FORMA
2. Sean u 1 y u" \'E'Ctores tangentes ortonormales en un punto p de M.
¿Qué información geométrica se deduce de cada una ele las condicionC's si:;;1ientcs de S en p?
e) S(ut) X S(u") =O.
a) S(u1)•u"=O.
d) S(u,)•S(u") =O.
b) S(u 1 ) + S(u") =O.
3. (Curvatura media). Demuéstrese que
a) el valor promedio de la curvatura normal en dos dirccci~mes ortogonales cualesquiera en p es H ( p) . (La afirmación análoga en
relación con K es falsa.)
donde k ( {}) es la curvatura normal, como teníamos en el corolario 2.6.
4. El jJOlinomio característico de un operador lineal arbitrario S es
jJ(kl
=
dct (A- kl),
donde A es cualquier matriz de S.
a) Hágase ver que el polinomio característico del operador de forma
es k" - 2Hk + K.
b) Todo o1rraclor lineal cumple con su ecuación característica; es
decir, p (S) es el operador cero cuandc se substituye formalmente S
en la expresión de p (k) . Demuéstrese esta afirmación, en el caso
del operador ele forma, al verificar que
Sv·Sw- 2HSv·w
+
Ev·w =O
para cu:1lquicr p~1r de vectores tang·cntes a AI.
Las funciones de valores reales
I(v, w) = v•w, II(v, w)
=
Sv·w,
y
III(v,w) = S 2 v·w
=
Sv·Sw,
definidas en todos los pares clt: vectores tangentes a una ·superficie
orientada, se llaman tradicionalmente primera, segunda y tercera formas fundamentales de AJ. K o son formas diferenciales; son, de hecho,
simétricas en v y en w, y no se alternan simplemente. El operador de
forma no intcr\'icnc explícitamente en el tratamiento clásico de este
tema; se le reemplaza por la segunda forma f undarnental.
5.
(Las curua¡ efe Dupin). En un punto p ele una región orientada de
1\i, sea C 0 la intersección de A1 en las cercanías de p con su plano tangen-
241
CuRVATURA GAUSSIANA
te T(M); C 0 consta específicamente de los puntos de M cerca de p que
están en el plano que pasa por p y es ortogonal a U ( p) . -:\os podemos
aproximar a C 0 al substituir, en lugar de lvf, su aproximación cuadrática ¡(1; por tanto,
e o se
ve aproximada por la curva
cerca de (0,0).
a) Descríbase C:o en cada uno de los tres casos K (p)
> O,
K (p)
<O
y K(p) =O (no de planicie).
b) Lo mismo que en a), pero se reemplaza C o por Ce y C_ 80 donde
se pone en lugar del plano tangente los dos planos paralelos a él,
y que ele e~! distan +e.
e) Este procedimiento no sirve en los puntos de planicie, puesto que
la aproximación cuadrática se convierte en M: z = O. Trácense, en
la silla de montar, Ca Ce y C_e.
6. Si v, w, a y b son vectores pn E 3 , demuéstrese la identidad de Lagrange
(vXw)•(aXb) =
v•a
v·b¡'.
w•a
w·b
1
7.
(Superficies paralelas). Sea M una superficie orientada por U; si E
es un número fijo (positivo o negativo), sea F: M--? E 3 en mapeo
con la propiedad ele que
F(p) = p
+
EU(p).
a) Si ves tangente a lvf en p, hágase ver que
Dedúzcase que
v=
F*(v) es v- eS(v).
vXw=j(p)vXw,
donde
Si la función J no se anula en lvf (M es compacta y 1 E 1 es pequeño), esto nos ensei1a que F es m apeo regular, ele manera que la
Imagen
M= F(M)
es, por lo menos, superficie inmersa en E 3 (ejercicio 10 de IV. S).
Se dice que 1\1 es paralela a M y que dista de ella E (figura 5.23).
b ,' Hágase ver que los isomorfismos canónicos de E 3 hacen de U una
normal unitaria en Ü para la cual S(v) = S ( v) .
e) Dedúzcanse las fórmulas siguientes de las curvaturas gaussiana y
media de 11!:
K(F) = K/J;
lf(F)
=
,(H- EK) /].
242
OPERADORES DE FORMA
u
Figura 5.23
8. (Continuación).
a) Verifíquense los resultados de (e) en el caso de una esfera de radio r
orientada por la normal hacia afuera U. Descríbase el mapco
F = F,. cuando e es O, cuando es - r y cuando es -2r.
b) A partir de una superficie orientable con curvatura gaussiana positiva y constante, constrúyase una superficie con curvatura media
constante.
4
Técnicas de cálculo
Ya hemos definido el operador de forma S de una superficie M en E 3 y
hemos descubierto el significado geométrico de sus invariantes algebraicas
principales: La curvatura gaussiana K, la curvatura media H, las curvaturas principales k 1 y ke y (en cada punto) los vectores principales e 1 y e 2 •
A continuación, aprenderemos la manera de expresar estas invariantes en
términos de cartas dentro ele Af.
Si x: D ~M es una carta dentro de lvf C E?, ya hemos empleado las
tres funciones de valores reales
e
> O son los cuadrados de las rapideces
definidas en D. Aquí, E> O y
de las curvas u y v-parámetro de x, y F mide el ángulo de coordenadas que
forman Xu y Xv> puesto que
F=xu"Xv
e
= [[xu[[[[xv[[cos{}= yEecos{}.
(figura 5.24). E, F y
son las "funciones de distorsión" de la carta X:
miden la manera en que x distorsiona la región llana D en E 3 para poder
aplicarla a la región curva x(D) en Af. Estas funciones determinan com-
TÉCNICAS DE CÁLCULO
243
Figura 5.24
pletamente el producto vectorial de los vectores tangentes en puntos de
x(D), si se tiene que
y
entonces
(En ecuaciones como ésta, se entiende que x,., Xv, E, F y G se evalúan en
(u, v), donde x (u, v) es el punto de aplicación de v y w.)
Ahora bien, Xu X Xv es función definida en D, cuyo valor en cada
punto (u, v) ele D es un vector ortogonal tanto a X u (u, v) como a Xv
(u, v), y, en consecuencia, normal a M en x (u, v) . Además, de acuerdo
con el lema 1.8 del capítulo II,
[ Xu
X
Xv
[12
=
EG - P.
Puesto que x es, por definición, regular, esta función en D de valores
reales no es nunca cero. Por lo tanto, podemos construir la función normal
unitaria
clcfinicla en D, que asigna a cada (u, v) ele D un vector normal y unitario
en x (u, v) . Insistiremos que, en este contexto, U, como Xu y Xv, no es
campo vectorial en x (D), sino simplemente una función ele \'a lores vectot'iales clcfinicla en D. De cualquier modo, podemos considerar el sistema
Xu, Xv, U como una especie ele c:1mpo defectuoso ele sistemas de referencia.
Por lo menos, U tiene longitud unitaria y es ortogonal tanto a xu· como a
Xv, aunque, en general, x,. y Xv no son ortonormales.
En este contexto, se suelen calcular las cleri,·acbs covariantes a lo largo
de las curvas parámetro de x, donde, ele acuerdo con la explicación ele
la sección 1, se reducen a la diferenciación parcial con respecto a u y v.
Como tcn;amos en el caso de X 11 y Xv, esta derivada parcial se denotará
con los subíndices u y v. Si
x(u, v)
=
(xi(u, v), x 2 (u, v), x 3 (u, v)),
244
OPERADORES DE FORMA
entonces, tenemos lo rnismo de la página 160, allí para
X 11
y x,:
Es evidente que Xuu y Xrv nos dan las aceleraciones de las curvas u y
v-parámetro. Puesto que el orden ele la diferenciación parcial es irrelevante, Xuv = x,," y esto nos da tanto la derivada covariante de Xu en la
dirección Xv como la de Xv en la dirección x,.
Ahora bien, si S es el operador de forma que se deriva de U, definimos
tres funciones más, todas en D y de valores reales:
l=S(x,)•x,.
m = S (xu) •x,, = S (x,) 'Xu
n
=
S(x,) •x,.
Puesto que Xu, X 11 constituye una base cld espacio tangente de 1tf en
cada punto ele x (D), se ve con claridad que estas funciones detcnninan
de manera única al operador de forma. Pm:sto que esta base no es, en general, ortonormal, l, m y n no nos dan una expresión simple de S (xu) y
S (x,) en términos de Xu y x,, En las fórmulas anteriores al corolario 3.5,
sin embargo, sí nos proveen de expresiones simples de las curvaturas gaussiana y media.
4.1 CoROLARIO. Si x es carta dentro de Jf C E", entonces
H(x)
=
Gl + Fn- 2Fm
~· 2(EX./~Fi)-
Demostración. En un punto p ele x (D), las fórmubs de la púgina 238
expresan a K(p) y JJ(p) en términos de vectores tangentes r·(p) en p.
Si V(p) y W(p) se reemplazan por los vectores tangentes xu(u, v) y
Xv(u, v) en x(u, v), encontramos las fórmulas que buscábamos para de
K(x(u, v)) y H(x(u, v) 1.
1
Cuando el conkxlo dé claridad acerca de la carta x, abre\·iaremos los
símbolos de las funciones compuestas E(x) y II(x) a simplemente K y II.
Por medio de un recurso corno el que empleamos en el lema 2.1, podemos encontrar una manera sencilla de calrular l, m y n, y, en consecuencia, K y H junto con ellas. Por cjn.nplo, puesto que [;··x" = Q, la
TÉCNICAS DE cALCULO
245
diferenciación parcial con respecto a v ~-es decir, la diferenciación ordinaria a lo largo de las curvas v-parámetro- resulta en
(Recordemos que Uv es b deri\'ada covariante del campo \Tctorial v ~
U ( u 0 , v) en cada curva v-parámetro, u = u 0 .) Puesto que x, ¡¡os da los
vectores de velocidad de csas curvas, el ejercicio 1 ele la sección 1 interviene aquí para enseñarnos que Ur = ~S ( Xv). Por lo tanto, la ecuación
anterior se convierte en
(figura 5.25). Podemos encontrar tres ecuaciOnes parecidas al substituir
u por v y v por u. En p:wticular, tenemos
Figura 5.25
Tenemos nuevamente que, como Xn y x, constituyen una base del espacio
tangente en cada punto, esto nos basta para la demostración de que S es
simétrico (lema 1.4).
4.2 LurA. Si x es carta dentro de 1\1 C E 3 , entonces
111 =
S (x,) •xv
=
U·xuv
La prill!era ecuación ele cada c::tso es sencillamente la definición, y
se jmrden inz.·eífir u y v en las fórmulas de m.
246
OPERADORES DE FORMA
z
Figura 5.26
4.3
EJEMPLO.
Cálculos de las curvaturas gaussiana y media
1) Helicoide (ejercicio 7 de la sección 2 del capítulo IV) . Esta superficie H, que se ve en la figura 5.26, queda cubierta por una sola carta
x(u,v)
=
b-=j=O,
(ucosv,usenv,bv),
para la cual
x, = (cos v, sen v, O)
Xv =
E
(-u sen v, u cos v, b)
=
1
F =O
e=
b" +u".
En consecuencia,
x,. X
Xv =
(b
sen v, - b cos v, u) .
Para encontrar solamente K, no hace falta calcular E, F y G, pero,
de cualquier manera, es prudente hacerlo, puesto que la identidad
11
x, X
Xv 11 =
y EG
- F2
nos comprueba, entonces, la longitud de x,. X Xv. (También se puede
comprobar su dirección, puesto que ha de ser ortogonal tanto a x,. como
a Xv.) Si denotamos 11 Xu X Xv 11 por W, entonces tendremos que, en el
helicoide, W = yb 2 + u 2, de manera que la función normal unitaria será
247
TÉCNICAS DE CÁLCULO
U= xuX x~
=
(bsenv, -bcosv,u)
yb + u
W
2
2
A continuación, encontramos
Xuu
=O
Xuv =
(-sen v, cos v, O)
Xvv =
(-ucosv, -usenv,O).
Aquí es obvio que Xuu = O, puesto que las curvas u-paramétricas son
rectas. Las curvas v-paramétricas son hélices, y ya habíamos encontrado,
en el capítulo II, esta fórmula de la aceleración Xvv· Ahora bien, según
el lema 4.2,
m=
n
=
b
W
(xuXxv)
W
Xuv•
xvv·
(xu X Xv) = O.
W
En consecuencia, por el corolario 4.1 y los resultados anteriores,
K =
ln- m 2
EG -.: . . pz =
-
(b/W)
W2
-b2
2
-w;¡- =
(b2
-b2
+ u2)2
Gl +En- 2Fm
H = -2[EG~-Fi)- = 0 ·
Por lo tanto, el helicoide es una superficie mínima con curvatura gaussiana
-1 <K< O.
El valor mínimo K = -1 ocurre en el eje central (u = O) del helicoide,
y K~ O a medida que la distancia 1 u 1 al eje se incrementa a infinito.
2) La silla de montar M: z = xy (ejemplo 1.3). Esta vez vamos a
emplear la carta de Monge x(u,v)
(u,v,uv) y, dentro del mismo formato de antes, calcularemos
Xu=
(1,0,v)
E= 1 + v 2
Xv =
(0, 1, u)
F = uv
G
U= (-v,-u,1)/W
Xuu
Xuv
Xvv
=O
= (0, O, 1)
= O
= 1 + u2
W = V 1 + u2
l
=o
m= 1/W
n =O.
+
v2
248
OPERADORES DE FORMA
En consecuencia,
K =
-uu
-1
(1+u"+v")"'
H = ---------(1 + uz + v")'i'.
----~----
En un sentido estricto, estas funciones son K(x) y lf(x), definidas en
el dominio E 2 ele x. Pero resulta fácil expresar directamente K y H como
funciones en }¡[ por medio de las funciones coordenadas dlínclricas
r = ~{~" +y 2 y z. ObsérYesc en la figura 5.27 que
r(x(u, v)) = y' u"+ v"
y que
z(x(u, u))
uv;
en consecuenCia, en 1H:
-1
r
H
.
K = - - -2 (1
+
)"'
=
-z
( 1 + r") 'le.
---~~--
Por consiguiente, la curvatura gaussiana ele ivf depende solamente ele la
distancia al eje de las z, pues se empieza a eleYar desde K = - 1 (en el
origen) y asciende a cero a medida que r tiende a infinito, mientras que
los cambios ele H son más radicales.
z
y
-y
Figura 5.27
Como sucede con todas las superficies simples (es decir, de una sola
carta 1, el helicoide y la silla de montar son orientables, puesto que, con
cCtlculos corno Jos que acvhamos ele hacer, obtenemos una normal unitaria
en toda la ;;,uperficiP. Por consig·uicnte, las funciones ck cun·atura principal
k 1 y k 2 están definidas sin ambigiiedacles en vmbas sup('rficics. Siempre se
pueden determinar c,;tas funciones a partir ele !\. y JI, gracivs a 1 corolario
249
TÉCNICAS DE CÁLCULO
3.5. Puesto que el helicoide es una superficie mínim3, el resultado ;:¡ que
lleg;:¡mos es sencillo:
-+-b
k1, k e
( b2
=
h~c
1 •
En la silla ele montar, tenemos
Las t~cnicas para calcular los vectorC's principales se h;:¡n puesto como
CJCrClCIO.
IIay otro camino para los cálculos, que depende ele una fórmula
exj;lícita Z = 2: ziUi ele un campo vtectorial normal distinto de cero, Z,
en A1. El caso principal es el ele una superficie que se nos cla en la forma
A1: g = e, pues allí ,·emos, gracias al C3pÍtulo IY. sección 3, que el
gradiente
es un campo vectorial así; por lo tanto, podemos emplear cualquier múltiplo escalar de \!g que nos com·enga, en lugar ele Z. Sea S el operador ele
forma que se deriva de la normal unit:uia
U= Z/]1 Z :1.
Si V es campo vectorial tangente ten Jvf, entonces el método 2 ele la
sección 1 nos lleva al resultado
Si aplicarnos una propiedad leibnizniana de esas clerivad3s, tendremos
_
\!vU- \!v
Z
ITtlr
=
·
(\!vZ)
11 ;{¡¡-
+
v[TizlrJz
1
(figura 5.28). El hecho importante aquí consiste en que V[1 /11 Z [ llZ es
campo vectorial normal; no nos importa qué campo es, y, por eso, lo
denotamos sencillamente por - Nv. En consecuencia,
S(V)
-\!rL
=
- (\!¡Z)
.I[X ¡,--+"\y.
:
J
11
:\ótcsc Cjlle s1 TV es otro campo \Tctorial tangl'nte en 1\f, entonces
.Yv X Nw =O, mientras que los productos ele la forma N 1· X Y serán
250
OPERADORES DE FORMA
z
Plano tangente
Figura 5.28
tangentes a M para cualquier campo vectorial euclidiano Y en M. Por
consiguiente, la deducción del lema siguiente a partir del enunciado del
lema 3.4 queda como cuestión de rutina.
4.4 LEMA. Sea Z un campo vectorial nom1al y no nulo en M. Si V y W
son campos vectoriales tangentes con la propiedad de que V X W = Z,
entonces
K= _(~·_\7v~)( S'_n~~)_
il z 11
4
H = _ Z· (\7 vZ X__!11__ ~ V X \7wZ)
211
z
113
Para calcular concretamente la curvatura gaussiana de una superficie
M: g = e por medio de cartas, hay que empezar por encontrar de manera
explícita una cantidad suficiente de ellas para cubrir a A1; por esta razón,
el cálculo completo de K puede resultar un trabajo tedioso, aun cuando g
sea una función bastante simple. El ejemplo siguiente nos enseña las
ventajas del procedimiento que acabamos de describir.
4.5 EJEMPLO. La curvatura del elipsoide
Tomamos g
no nulo)
=
~
X¡ 2
1ai 2 ,
y nos valemos del campo vectorial normal (y
Z =
Ahora bien,
SI V=~
1
2
~ Xi
\7 g = . ::.. ai2
U
i·
v;U; es campo vectorial tangente a M,
\7vZ =
~ y[xi]
2
ai
Ui =
~ !_i~
a¡-
Ui
251
TÉCNICAS DE CÁLCULO
puesto que
V[xi] = dx,(V)
=Vi.
Al obtener resultados parecidos con respecto a otro campo vectorial W,
tenemos
!xl
x2
Z·\7vZ X \7wZ = 'vl
V;]
¡~~2 a"z
¡~2
azz
lal2
az2
u~l
w2
x3
-:;¡
1
a:3¡
::~
" " ., X·V X
al-a"·a3-
w.
~3 2 1
donde X es el campo vectorial especial ,2: Xi U i que usamos en el ejemplo
3.9 del capítulo IV.
Siempre es posible elegir V y W de manera que V X W = Z. Pero,
entonces,
x·z
X•V X W = X•Z = 2: -•2 = l.
ai
Y el lema 4.4 nos ha servido para encontrar
donde
En cualquier superficie orientada en E 3 , la función soporte h que le
corresponde asigna a cada punto p la distancia ortogonal h (p) = p•U (p)
que va desde el origen al plano tangente T 1, ( ivf), como se ve en la figura 5.29 con respecto al elipsoide. Por medio del campo vectorial X (cuyo
valor en p es el vector tangente pp), encontramos en el elipsoide que
y
Figura 5.29
252
OPERADORES DE FORMA
h
=
X· U
=
X•
z
1
]z //~
·r:-z/1·
Por consiguiente, una expresión más intuitiva de la curvatura gaussiana del
eli psoi el e es
K=
h'
a"b"c" ·
Observamos que, cuando a = b = e = r, el elipsoide rs una esfera, y
esta fórmula se convierte en K = 1/ r 2 •
Los resultados ele técnicas para calcular que hemos obtenido en esta
sección, aunque fueron enunciados para superficies, se siguen ;1plicando
a las superficies inmersas (ejercicios 10 del capítulo IV, sección 8). En
particular, las fórmulas del corolario 4.1 tienen sentido en un mapeo
regular y arbitrario x: D ~ E'3• La justificación teórica de esta grncralidad
adicional se resume en la sección 7 del capítulo VII.
EJERCICIOS
1. Hágase ver que la esfera ele radio r tiene K
métodos de esta sección a la carta geográfica
=
1/ r 2
al aplicar los
x (u, v) = (r cos v cos u, r e os v sen u, r sen v) .
2.
Para una carta ele ~fongc x(u,v) = (u,v,f(u,v)), verifíquese que
E= 1
+ fu 2
F
=
fu/v
G
=
1
+p
l
=
fuu/W
m =
f,,)W
1l =
frv/W
donde
Encuéntrense las fórmulas de K y H.
3.
(Continuación). Dedúzcase que la imagen de x es llana
y que es mínima
SI
y sólo si
SI
y sólo
SI
253
r':CNICAS DE CÁLCULO
1
,~; Hágase ver que la imagen ele la carta
x(u,v) = (u,v,logcosv- logcosu)
es superficie mínima, con curvatura gaussiana
- sec"u sec"v
K=
donde
l'V 2 = 1
+
tan 2 u
+
tan 2 v.
5. Exprésese la curvatura K ele la silla ele montar ele mono Af: z
3xy
2
(figura 4.47) en términos ele r
superficie?
y x + y".
2
=
=
x2
-
¿Es mínima esta
6. Encuéntrese la curvatura gauss1ana ele los paraboloides elíptico e
hiperbólico
x"
l'vf : z = -a2
+
y"
e -b~ ,
-
(e= -+-1).
7. Verifíquese que el segmento ele curva
a ( t)
= x (a1 ( t) , a" ( t) ) ,
tiene longitud
L(a) =
J:
+
(Ea,' 2
donde se evalúan E, F y G en
2Fat' a/+ Ga/ 2 )% dt,
a,, a".
8. Demuéstrese que el ángulo ele coordenadas ¡'} ele una carta x: D -7 lvf,
O < {} < -:r, es una función diferenciablc en D. (Indicación: Aplíquese
la desigualdad ele Sclm·arz de II .l.)
9. a) Una carta x dentro de ¡\1 es ortogonal cuando F =O (ele manera
que Xu y Xv son ortogonales en cada punto). "Verifíquese esto en el
caso de
S(xu)
S(x,)
l
=
7.i-
m
X¡¿+
n1
}] Xu
ex,.
n
+ (] Xr·
254
·JPERADORES DE FORMA
b) Una carta x en .M es principal cuando F = m = O, Demuéstrese
que Xu y Xv son vectores principales en cada punto, cuyas curvaturas principales correspondientes son ljE y njG,
1O. Demuéstrese que un vector tangente
es vector principal si y sólo si
~/1
n
=O.
1
(Indicación: v es principal si y sólo si el vector normal S(v) X v
es cero.)
11. Hágase ver que la silla de montar M
vectoriales
(V 1 +
u 2 , -+-
V1 +
(4.3) tiene los dos campos
v", v v1 + u 2 -+- u y 1 + v 2 ),
que son principales en cada punto. Verifíquese que son ortogonales
y tangentes a M.
12. (La superficie mínima de EnnejJer). Esta es la superficie mmersa
dada por
x(u,v)
=(u-~+
3
uv 2 , v -
~ +u
2
v,u 2
-
v2
)·
Demuéstrese que esta superficie inmersa es mínima, y que x no es
uno a uno. (Indicación: Para H = O, es suficiente demostrar que
E =
e,
F =
o y X¡¡" +
Xvv
= O.)
13. (Criterio de cartas para los puntos umbilicales). Verifíquese que el
punto x(u, v) es punto umbilical si y sólo si existe un número k tal
que l = kE, m= kF y n = kG en (u, v) (k resulta ser, entonces,
la curvatura principal k 1 = k 2 ) .
14. Si v = v 1 xu + v 2 Xv es tangente a M en x (u, v 1, la curvatura normal
en la dirección determinada por v es
donde se evalúan las diversas funciones en (u, v).
255
15. Encuéntrense (si acaso existen) los puntos umbilicales de las superficies siguientes:
a) Silla de montar (ejemplo 4.3).
b) Silla de montar de mono (ejercicio 5) .
e) Paraboloide elíptico (ejercicio 6) .
16.
(Tubos). Si
f3 es una curva de rapidez unitaria en
x (u, v) = f3 (u)
+
e (cos v N (u)
+
E 3 con K)> O, sea
sen v B (u) ) .
Por lo tanto, las curvas v-parámetro son circunferencias de radio
(constante) E en planos ortogonales a f3. Hágase ver que
a) x es regular si 0 es suficientemente pequeño; ele esta manera, x es
una superficie inmersa que se llama tubo de radio E alrededor ele f3.
b) U = cos v N (u) + sen v B (u) es una función normal unitaria en
el tubo.
e) K= __ ~-K(ul__c:_o~­
c(1
-
K (U )
e COS
V )
(Indicación: Aplíquese el hecho de que S(x,) X S(xv)
=
Kx" X Xr.)
17. Hágase ver que los hiperboloides elípticos de uno y de dos mantos
(ejercicio 10 de IV.2) tienen la curvatura gaussiana K= -h4 ja 2 b2 c2,
y K = h4 / a 2 b 2 c 2, y que las dos funciones soporte h están dadas por
la misma fórmula que la del elipsoide ( 4.5) .
18. Si h es la función soporte de una superficie orientada 111 C E 3 ,
hágase ver que
a) Un punto p de M es punto crítico de h si y sólo si p·S(v) =O
para todos los vectores tangentes v a 1\1 en p. (Indicación: Exprésese
h como X• U, donde X = ¿ xJ';.)
b) Cuando K (p) =F O, p es punto crítico de h si y sólo si p (considerado como vector) es ortogonal a Af en p.
19. Aplíquense los ejercicios anteriores para encontrar los intervalos de
curvatura gaussiana del elipsoide y los hiperboloides elípticos de uno
y dos mantos (ejercicio 10 de IV.2). Supóngase que a>. b >c.
20. Calcúlense K y H en la silla de montar (ejemplo 4.3) con el método
descrito al final de esta sección. (Indicación: Tómense V y W tangentes a los dos conjuntos ele rayos de 1\1.)
21. La superficie mínima de Scherk, M: ez cos x = cos y. Sea IR la
región del plano xy en la que cos x cos y > O; IR. viene a ser un
diseño de tablero de damas de cuadrados abiertos, con vértices en
( ( r. /2 + r.m, (r. /2) + n ..·). Hágase ver que
256
OPERADORES DE FORMA
a) M es superficie.
ú) Para cada punto (u, u) de ii( hay exactamente un punto (u, u, w)
en Af. Los únicos puntos adicionales de A1 son rectas verticales
enteras que pasan sobre cada uno de los vértices de D{ (figura 5.30).
e) Af es una superficie mínima en la que K = sen"~ + 1) 2 •
(Indicación: V = cos xU 1 + st>n xU:; es campo \ectorial tangente.) Describiremos más propiedades ele esta superficie en el ejncicio 11 de VI.8.
Figura 5.30
22. Sea Z un campo vectorial normal en lvf que nunca es cero. Hágase
ver que un vector tangente v a A1 en p es principal si y sólo si
v• Z (p) X
V' vZ = O
(véase la indicación del ejercicio lll).
La ecuación anterior, junto con la condición de tzmgt>ncia
Z(p) ·v =O
debe quedar resuelta para las direcciones principales. Por lo tanto,
se pueden localizar los puntos umbilicales por medio de estas ecuaCIOnes: p es punto umbilical si y sólo s1 todo vector tangente v en p
es principal.
257
CURVAS ESPECIALES EN UNA SUPERFICIE
23. Consideremos el elipsoide M:
.~
l. 1-fuéstrese que
a) Un \Tctor tangente v en el punto p será principal si y sólo s1
O= jJ1v~v3(ac 2 - a3 2) + Pcv1v~(a3 2 - a1~) + p3v1v"(a1 2 - az~).
b) Si suponemos que a1 > a 2 > a,l, hágase ver que hay exactamente
cuatro puntos umbilic3.les en )\1, cuyas coordenadas son
5
Curvas especiales en una superficie
Consideraremos con brevedad tres tipos de curvas que tienen significado
geométrico en una superficie A1 e E 3 . Ni esta sección ni la que le sigue son
en realidad esenciales para la teoría; su fin es el de poner ejemplos de las
ideas que ya hemos expuesto y del trabajo que desarrollaremos más adelante.
5.1 DEFINICIÓN. Una curva regular a en jf e E 3 es curva (o línea
de curvatura) principal cuando la velocidad a' de a siempre apunta en la
dirección principal.
Es así como las curvas principales siempre vrapn por las direcciones
en que la flexión de Af en K' toma valores extremos. Si hacemos caso
omiso de los cambios de parametrización, tendremos que hay exactamente
dos curvas principales que pasan por cada punto no umbilical de lvf;
se cortan ortogonalmente, por necesidad. (En un punto umbilical p, toda
dirección es principal, y, en las proximidades de p, se puede volver bastante
complicado el diseño de las curvas principales.)
5.2 LE1IA. Sea a una curva regular en M e E·>, y sea U un campo
vectorial normal y unitario restringido a a. Entonces,
1) La curva a es principal si y sólo si U' y a' son colinealcs en cada
punto.
2) Si a t>s curva principal, entonces la curvatura principal de Af en la
dirección de a' es a"•U/a'•a'.
Demostración. 1) El ejercicio 1 dr la sección 1 nos hace ver que
S(a') = -l·'. De esta manera, U' y a' son colineales si y sólo si S(a')
y a' son colineales. Pero, por el teorema 2.:J, esto significa que a' siempre
apunta en una dirección principal. o sea, que a es cun·a principal.
2) Puc•;to que a es curva principal, el campo vectorial a'/[; a'
se
compone completamente de \TCtores principales (unitarios) que pertenecen,
para concretar, a la curvatura principal k;. Por lo tanto,
1
1
258
OPERADORES DE FORMA
k¡ = k (a' 111 a'
11 )
= S (a' 111 a'
S(a}_•a'
.a"•[]
a'•rx'
a'•a'
! 1) •a' 111 a' 11
donde tenemos la última igualdad gracias al lema 2 .1.
1
Este lema, ( 1) no es más que un simple criterio para determinar
si una curva es principal, mientras que (2) nos determina la• curvatura
principal a lo largo de una curva de la que se sabe que es principal.
5.3 LEMA. Sea a una curva que corta en una superficie Af C E·' un
plano P. Si el ángulo que forman Af y P es constante a lo largo de a,
entonces a es cun·a principal de M.
Demostración. Sean U y V campos vectoriales normales y unitarios
(respectivos) en 1\1 y P a lo largo de la curva a, como se ve en la figura 5 .31.
Puesto que P es un plano, V es paralelo, es decir V' = O. Ahora bien,
la suposición de constancia del ángulo significa que U •V es constante;
por consiguiente,
O= (U·V)' = U'·V.
Puesto que U es vector unitario, U' es ortogonal a U así como a V. Por
supuesto, lo mismo pasa con a', puesto que a está tanto en M como en
Figura 5.31
P. Si U y V son linealmente independientes (como se tiene en· la figura 5.31) concluimos que U' y a' son colineales; en consecuencia, por el
lema 5.2, a es principal.
Sin embargo, la indc>pcndencia lineal sobmente se deja de tener cuando
U = +V. Pero, entonces, U' = O. y de esta manera, a es (trivialmente)
principal también en este caso.
1
(Es apenas un poco mús difícil demostrar la generalización que se pide
en el ejercicio 5.) Por medip ele este resultado, se ve con facilidad que
Ct:RVAS ESPECIALES EN UNA St:PERFICIE
259
los meridianos y los paralelos de una superficie de revolución ]l¡f son sus
curvas principales. En efecto, c:tda meridiano fL es la intersección con lvf
de un plano que pasa por el eje de revolución y es, en consecuencia
ortogonal a },f a lo largo de ,'L, rnientr<ls que cada paralelo " es la intersección con lv1 por un plano ortogonal al eje; y,
por la simetría rotacional, un plano así forma
un ángulo constante con lvf a lo largo de -::-.
Las direcciones tangentes a Af e E 3 en que la
curvatura normal es cero se llaman direcciones
asintóticas. Por tanto, un vector v será asintótico
cuando se tenga k(v) = S(v)•v =O, de manera
que sabemos que, en una dirección asintótica, ,H
no se aleja (por lo menos en las inmediaciones
Figura 5.32
de ese lugar) de su plano tangente.
Por medio del corolario 2.6, podemos analizar por completo dos direcciones asintóticas en términos de la curvatura gauss1ana.
5.4 LEMA. Sea p un punto de M e E 3 .
1) Si K (p) > O, no hay direcciones asintóticas en p.
2) Si K(p) <O, hay entonces exactamente dos direcciones asintóticas
en p, que quedan bisecadas por las direcciones principales (figura 5.32)
a un ángulo {} tal que
3) Si K ( p) = O. entonces toda dirección es asintótica si p es punto
de planicie; de lo contrario, hay exactamente una dirección asintótica,
que es también principal.
Demostración. Todos estos casos se deducen ele la fórmula de Euler,
que está en el corolario 2.6.
1) Puesto que k1(p) y ke(p) tienen el m1smo signo, k(u) no es
nunca cero.
2) Aquí k1 ( p) y k 2 ( p) tienen signos opuestos, y podemos resolver la
ecuación O = ki(p) cos~{} + k :e (p) sen 2 {} para obtener las dos direcciones
asintóticas.
3) Si p es punto llano, entonces
en consccuenoa, k (u) es idénticamente cero. Si solamente
260
OPERADORES DE FORMA
k2 (p) =O,
entonces
será cero solamente cuando cos {}
cipal u = e 2 .
=
O, es decir, en la dirección pnn-
1
Nos damos una idea aproximada de las direcciones asintóticas en un
punto p de una superficie dada A1 al visualizar la intersección del plano
tangente
Tp (M)
con M cerca ele p. Cuando K ( p) es negativa, esta in ter-
Figura 5.33
sección consistirá en dos curvas que pasen por p, cuyas tangentes (en p)
serán direcciones asintóticas (ejercicio 5 ele la sección 3) .
En la figura 5.33 \Tmos las dos direcciones asintóticas A y A' en un
punto p del ecuador interior de un toro. (Las dos curvas de intersección
se funden en una sola figura de 8.)
5.5
Una curva regular a en }vf--? E 3 es una curva aszntótica cuando su velocidad a' siempre apunta en dirección asintótica.
DEFINICIÓN.
Por tanto, a es asintótica si y sólo si
k(a') =S (a') •a'
=
O.
Puesto que S (a') = -U', con esto tenemos un criterio, U'•a' = O de la
determinación ele que a sea asintótica. Las curvas asintóticas son más
sensibles a la cun-atura gaussiana ele lo que son las cun-as principales: el
lema 5.3 nos enseña que no hay ninguna en las regiones en que K es
positiva, pero dos de ellas se cortan (y forman un ángulo que depende
de K) en cada punto de una región en que K es negati,-a.
El criterio más sencillo para determinar si una curva en Jvf es asintótica
consiste en que su aceleración a" sea siemj;rc tangente a A1. De hecho,
la diferenciación de U•a' = O nos resulta en
CURVAS ESPECIALES EK UNA SUPERFICIE
261
de manera que U'•a' = O (a es asintótica:~ si y sólo si U•a" = O.
El análisis de las direcciones asintóticas del lema 5.4 tiene consecuencias
para así las superficies llanas corno las mínimas. En primer lugar, una
sujierficie M en E 3 es mínima si y súlo si existen dos direcciones asintóticas
en cada uno de sus puntos. De hecho, /-[ ( p) = O equivale a que ~ 1 ( p) =
- k2 (p), y al examinar las posibilid:tdes del lema 5.4, vernos que
kl(p) = - k2 (p) si y sólo si o bien a) p es de planicie (y el criterio ti em:
validez trivial) o b)
K(p)
<O
con{}= +-,;/4,
lo que significa que las dos direcciones asintóticas son ortogonales.
Por consiguiente, una superficie es mínima si y sólo si por cada punto
pasan dos curvas asintóticas que se cortan ortogonalmente. Esta observación
da el sentido geométrico a los cálculos del ejemplo 4.3, donde vimos que
el helicoide es superficie rnínim::t. De hecho, las curvas u y v-parámetro
de la carta x son ortogonales, puesto que F = O, y sus aceleraciones son
tangentes a la superficie, debido a que l = U•xuu = O y n = U•x.vv = O.
En un sentido poco preciso, una superficie reglada lvf es tal que la
genera una recta que se desplaza por E'; las diversas posiciones de la recta se llaman rayos de M. Por lo tanto, 1\1 tiene una parametrización
en la forma reglada
x(u,v)
=
p(u) + v8(u),
o
p(v)
+
u8(v)
donde f3 y 8 son curvas en E 3 , donde 8 no es nunca cero ( véanse los
ejercicios 4-9 de la sección 2 del capítulo IV). Por ejemplo, el helicoide
es superficie reglada, pues podemos expresar la carta del ejemplo 4.3 como
x(u,v) = (O,O,bv)
+ u(cosc·_.senv,O).
Esto nos enseña que el helicoide se genera por una recta que gtra en
rotación a medida que se eleva por el eje de las z. La silla de montar
A1: z = xy es doblemente reglada, pues
x(u,v) = (u,v,uv
O, O)+
l,u)
) __ {(u,(O,v,O)
+ u(l,O,v).
v(O,
Que la K de ambas superficies sea negativa no se debe a un accidente;
tenemos
5.6 LEJ.IA. L'na superficie reglada Af tiene cun-;üur:l gaussiana J{;?; o_
Adem(¡s, K = O si y sólo si la norm:1l unitaria U es paraleb a lo largo
262
OPERADORES DE FORMA
de cada rayo de 1\1 (de manera que todos los puntos p de un rayo tienen
el mismo plano tangente Ti' (lvf). 1
Demostración. L'na recta t -7 p + tq en cualquier superficie es, desde
luego, asintótica, pues su aceleración es cero, y es, por tanto, tangente de
manera tri\·ial a Af. Por definición, una superficie rPglada contiene una
recta que pasa por cada uno de sus puntos. En consecuencia, hay una dirección asintótica en cada punto, y, por el lema 5.4, K< O.
A continuación, sea a(t) = p + tq un rayo arbitrario en Af. Si U es
paralelo a lo largo de a, entonces S (a') = [;'' = O. Por lo tanto, a es curva
principal con cur\·atura principal k(a') =O, de manera que K= k 1 k" =O.
Si, recíprocamente, K= O, ckducimos del caso (3) del lema 5.4 que las
direcciones asintóticas (y cur\·as asintóticas) en JI también son jnincijJales.
Por lo tanto, cada rayo a es principal (S(a') = k(a')a') así como asmtótico (k(a'J =O); en consecuencia, U'= -S(a') =O.
1
Hemos llegado a la definición del último y más importante de los
tipos de curvas que estamos estudiando.
5.7 DEFINICIÓN. Una nuva a en ]¡f C E 3 es una geodésica de M
cuando su aceleración a" es siempre normal a 1\f.
Puesto que a" es normal a Af, los lwbitantes de A! no percibirían aceleración alguna; para ellos, la geodésica PS una "recta". El estudio completo de las geodésicas f'S tnna dd capítulo YII, donde examinaremos
en particular el carácter que tienen como las rutas de viaje más cortas.
Las geodésicas son mucho más abundantes en una superfic;e A! que las
curvas principales o asintóticas; en efecto, el teorema 4.2 del capítulo VII
nos dice que hay una gcoclésica que ]X1>:1 por c:1cla punto ele 1\f en cada
dirección.
Puesto que, en ¡x1rticular, su aceleración a" es ortogonal a su velociclad a'. una ¡:codésica (Y tiene rapidez constante, pues la diferenciación de
11 a' 11"
=
a'•(t' resulta en
2a'•rt'' =O.
l; na recta a ( t) = p + tq en 1H es siempre una geodésica en A1, puesto
que su aceleración a" = O f'S, ele manera trivial, normal a i1!. En contraste con las cutTas principaks y asintóticas. las geodésicas no se pueden
definir en términos del operador de fm: n: sin embargo, una geodésica
(ele rapidez unitaria) a con curvatura positiva tiene u~1a rebción intere~,;mtc con S. qute se basa en el aparato ele Frenet ck a. Como la normal
principal N=(/' /K dr: (t f'S normal a la superficil' )f. tenellJOS que
-¡V'= S(a') = S(T).
Por lo tanto, de ;:cuerdo con una ecuación de Frenet, S ( T)
CURVAS ESPECIALES EN UNA SUPERFICIE
263
Estos comentarios bastarán para que deduzcamos las geodésicas de
tres superficies que son bastante especiales.
5.8
EJE:-.1PLO.
Geodésicas de algunas superficies en Ee.
1) Planos. Si a es geodésica en un plano P ortogonal a u, a'•u = O,
y, en consecuencia, a" •u = O. Pero a" es por definición normal a P; en
consecuencia a" = O. Por tanto, a es una recta, y puesto que tooa línea
que sea recta es también geodésicn, concluirnos que las geodésicas de P son
todas las rectas de P.
2) Esferas. Si a es geodé,ica (de rapidez unitaria) en una esfera ~
de radio r, entonces, de acuerdo con un comentario anterior, S (T) =
KT - rB. (Vimos en el capítulo II, sección 3, que cualquier curva en
:S tiene curvatura positiva, de manera que el aparato de Frenet es utili-
Figura 5.34
zable.) Pero el ejL'mplo 1.3 nos enseñaba que S ( T) = + ( 11 r) T, según
la normal unitaria que se empleara. Las dos ecuaciones de S (T) implican
que K = 11 r y que r = O. En consecuencia, por el lema 3.6 del capítulo II,
a está en una circunferencia C de radio r. Este valor máximo del radio r
obliga a e a ser un circulo nuhimo de :S, es decir, e es la intersección
con :S de un plano que pasa por su centro. Desde el punto de vista recíproco, cualquier cun·a ele rapidez constanü' que vaya por uno de los círculos máximos tiene una aceleración a" que apunta Dl centro del círculo,
que también es el centro de la esfera :S, ele manera que a" es normal
a :S. Llegarnos a la conclusión de que las geodésicas de :S son las parametrizaciones de rapidez constante de sus círculos máximos (figura 5.34·).
3) Cilindros. Las geodésicas del cilindro circular que definirnos concretamente por 1\1: x 2 + y" = r 2 son todas cun·as de la forma
a(t) =(reos (at
+
b),rsen (at
+
b),ct
+ d).
De hecho, se puede expresar cualquier curva que esté en lv! como
a ( t)
= (r cos íJ ( t) , r sen íJ ( t) , h ( t) ),
264
OPERADORES DE FORMA
y un vector que sea normal a M tiene la coordenada z igual a cero. Por
lo tanto, si a es geodésica, entonces h" = O, de manera que h(t) = ct + d.
La rapidez ( r 2 {}' 2 + h'") 112 de <er es constante; en consecuencia, a' es constante, luego ff(t) = at + b.
Cuando las dos constantes a y e son distintas de cero, a es una hélice
en lvf. El caso extremo en que a = O nos da los rayos de 1H, y e = O nos
deja con las circunferencias de las secciones transversales.
Podemos resumir de la manera siguiente las propiedades esenciales de
los tres tipos de curvas que hemos estudiado:
Curvas principales k(cx') = k 1 o ke S(cx') colineal con ex'
Curvas asintóticas k (ex') = O
S (ex') ortogonal a ex' ex" tangente a lvf
Geodésicas
o/' normal a M
EJERCICIOS
1. Demuéstrese que una curva ex en A1 es recta de E' s1 y sólo si es al
mismo tiempo geodésica y asintótica.
2. ¿A cuál de los tres tipos -principal, asintótica, geodésica- pertenecen las curvas sigui en tes?
a) La circunferencia superior a en el toro ( figura 5.35).
b) El ecuador exterior f3 del toro.
e) El eje de las x en .i\,1: z = xy.
(Se debe suponer que tenemos parametrizacioFigura 5.35
nes de rapidez constante.)
3. Hágase ver que, en una superficie de revolución, todos los meridia. nos son geodésicos, pero que el paralelo que pasa por un punto a(t)
de la curva perfil es geodésico si y sólo si a' ( t) es paralelo al eje de
revolución.
4. Sea a una curva asintótica en M C E 3 con curvatura K> O.
a) Demuéstrese que la binormal B de a es normal a la superficie
a lo largo de a, y dedúzcase que S ( T) = TN.
b) Hágase ver que, a lo largo de a, la superficie tiene curvatura
gaussiana K = - T 2 .
e) Aplíquese b) para encontrar la curvatura gaussiana del helicoide
(ejemplo 4.3).
S. Supongamos que una curva ex descansa en dos superficies 1\1 y M que
forman un ángulo constante a lo largo de a( U• U es constante). Hágase ver que a es principal en JI si y sólo si es principal en A1.
265
CURVAS ESPECIALES EN UNA SUPERFICIE
6. Si x es carta dentro de M, demuéstrese que una curva a ( t) = x (a~ ( t),
a2 ( t) ) es
a) Principal
SI
y sólo
SI
a/z
al'z
E
F
G
l
n1
n
b) Asintótica s1 y sólo
7. Sea
-al' a/
SI
la/ 2
+
=o,
2ma/ a 2 '
+
na/"
=
O.
M C E 2 . En lugar del campo
de sistemas de referencia de Frenet en a, consideremos el campo de
sistemas de referencia T, V, U donde T es la tangente unitaria de a,
U es la normal a la superficie restringida a a y V = U X T ( figura 5.36).
a una curva de rapidez unitaria en
u
Figura 5.36
a) Verifíquese que
T'
V'
gV
-gT
+ kU
+tU
U'= -kT- tV.
donde k = S ( T) •T es la curvatura normal k ( T) de M en la
dirección T, y t = S (T) •V. La nueva función g se llama curvatura geodésica de a.
b) Dcdúzcase que a es
-
geodésica(=) g
=
O
asintótica (=) k
= O
principal(=) t = O.
8. Si a es una curva (ele rapidez unitaria) en }vf, muéstrese que
a) a es tanto principal como geodésica si y sólo si queda en un plano
que es en todas partes ortogonal a lvf a lo largo de a.
266
OPERADORES DE FORMA
b) a es tanto principal como asintótica si y sólo si descansa en un
plano que es en todas partes tangente a Af a lo largo de a.
9. En la silla de montar de mono M (ejercicio 5 de IY.4) encuéntrense
tres curvas asintóticas y tres curvas principales que pasen por el origen O. (Esto es posible porque O es un punto umbilical de planicie.)
1o. Hágase ver que la superficie reglada
curvatura gauss1ana
-nt 2
EG- F
K=--- ----2
X
f3 (u) + vo\ u) tiene
(u, V) =
-(f3'·o x o') 2
donde
W=
11.
llf3'X o+ vo'X
o¡¡.
(Superficies regladas llanas).
a) Hágase ver que los conos y los cilindros son llanos ( véanse los
ejercicios 5 y 6 de IV.2).
b) Si f3 es una curva de rapidez unitaria en E 3 en la que K > O, la
superficie reglada
x(u, v)
=
f3(u) +
vT(u),
V>
0,
se llama superficie tangente de f3 (figura 5.37). Demuéstrese que
x es regular, y que la superficie tangente es llana.
x(u, vj
Figura 5.37
12. Sea a una curva regular en Af C E", y sea U la normal unitaria de
j\;f a lo largo de a. I U1gase \ er que a es curva principal de Af s1 y
sólo si la superficie reglada x (u, u) = a (u) + ·e U (u) es llana.
13. Una geodésica cerrada de .Al es una geodésica que es función pt"riódica a: R.~ A1. Encuéntrense todas las geodésicas cerradas de una
esfera, un plano y un cilindro eircubr.
CURVAS ESPECIALES EN UNA SUPERFICIE
267
14. Una superficie reglada es no cilíndrica si sus rayos siempre cambian
de dirección; por lo tanto, en cualquier curva directriz, 8 X o'=/= 0.
Hágase \'er que
a) una superficie no cilíndrica tiene parametrización de la forma
x(~
v) = a(u) + uo(u)
en la que lloll = 1 y a'•o' = O.
b) en esta parametrización,
La curva a se llama curva guía, y la función jJ es el parámetro de
distribución.
(Indicación: En a), si 11 8 11 = 1, encuéntrese una f para la que se
tenga a = a + fo. En b), hágase ver que a' X 8 = jJo'.)
15. Descríbase el comportamiento cualitativo de la curvatura gaussiana
K en un rayo arbitrario de una superficie reglada (no cilíndrica).
Hágase ver que la trayectoria de la curva guía es independiente de
la manera en que se elija la parametrización, y que el parámetro
ele distribución es, en esencia, función del conjunto de rayos.
16. Verifíquese que la curva guía del helicoide es su eje central, y que
su función ele distribución es constante.
17. Encuéntrense la curva guía y el parámetro de distribución de
a) Los dos conjuntos de rayos de la silla de mont:1r
(ejemplo 4.3) .
b) Los dos conjuntos ele rayos del hiperboloide de
re\·olución
Figura 5.38
(figura 5.38). (Encuéntrese un;¡ parame~1izacwn reglada mediante una modificación del ejercicio r) de IV.2.)
18. Si x (u, v) = a (u) + vo (u) paramctriza una superficie reglada no
cilíndrica, sea L (u) el rayo que pasa por a (u). Hágase wr que
a) Si {}e es el ángulo (positivo menor) que va de L (u) a L (u + "),
y si d" es la distancia ortogonal desde L(u) hasta J,(u +e), entonces lím ( d,.f {}
= p (u). Por consiguiente, el parámetro de clis-
J
e---+o
tribución es el inverso multiplicativo de la t;:¡sa ele rotación de
J.: su si~no describe la dirección ele la rot<1ción.)
268
OPERADORES DE FORMA
b) Hay un punto jJ" de L(u) que es el más prox1mo a L(u +E), y
lím jJ = a (u) . (Con esto, tenemos otra caracterización ele la curva
guía.)
e 1 La distancia desde a (u) hasta a (u + E) no ha ele ser necesanamente una buena aproximación a la distancia de desde L (u)
hasta L (u + E). Póngase un ejemplo.
19. Sea x(u, v) =a+ v8, !18 :1 =l. que parametriza una superficie reglada llana Af. ::\'fuéstrese que
a) Si a' es siempre cero, entonces "H es un cono. t
b) Si 8' es siempre cero, entonces Af es un cilindro.t
e) Si tanto e/ como 8' no son nunca cero, entonces Jvf es la superficie
tangente de su cun·a guía. (Ejercicio llb.)
Por supuesto, los casos que hemos enunciado están muy lejos
de agotar todas las posibilidades, pero, en cierto sentido, nos enscílan
que una superficie reglada y llana, arbitrariamente escogida (una
"superficie desarrollable"), es una mezcla ele los tres tipos del ejercicio 11. Si una superficie así es cerrada en E 3 (ejercicio 10 de IV.8).
tiene que ser un cilindro, puesto que la condición de clausura implica
que los rayos son rectas comj;letas.
20. Un conoide recto es una superficie reglada en la que todos sus rayos
pasan por un eje fijo (figura 5.30). Si tomamos estP eje como eje
de las z de E\ obtenemos la parametrización
x(u,v) = (ucos{}(v),usen{}(v),h(v)).
a) Encuéntrense las curyaturas gaussiana y
media.
b) Hágase yer que la superficie es no cilíndrica
si {}'no es nunca cero; encuéntrese su curva
guía y su parámetro de distribución.
21. Trácese el conoide A1 que está parametrizaclo
por
x(u,v)
=
(ucosu,usenv,cos2v),
Figura 5.39
y encuéntrense sus curYaturas gaussiana y media. Exprésese M en
la forma .: = f (x, y) (con la omisión del origen) .
22. Demuéstrese que una superficie que sea tanto reglada como mínima
es parte o bien de un plano, o bien de un helicoide.
(Indicación: Las regiones llanas en "H son de planicie; por tanto, si argumentamos de la manera en que lo haremos al demostrar
t En cada caso, suponemos que no hay restricciones en v, con b
de las que se necesitan para asegurar la regularipacl de x.
excepción
269
SUPERFICIES DE REVOLUCIÓN
el teorema 6.2, podemos suponer que K < O. "\plíquese la parametrización del ejercicio 14, y añádase la característica de que 3 sea
una curva de rapidez unitaria. Entonces, JI = O nos lleva a tres
ecuaciones. Dedúzcase que 3 es una circunferencia unitaria; podemos
suponer que 3(ul = (cosu.sr'nu.OI.I
6
Superficies de revolución
La geometría de una superficie de revolución es bastante sencilla; sin
embargo, estas superficies exhiben una amplia variedad ele comportamientos geométricos; constituyen, por consiguiente un buen campo para experimentar.
Aplicaremos los métodos de la sección 4 al estudio de una superficie
arbitraria de revolución M, parametrizada, como en el ejemplo 2.5 del
capítulo IV, por medio de
x(u,v)
=
(g(u),h(u) cosv,h(u) senv).
Recordemos que h (u) es el radio del paralelo de A1 a una distancia g (u 1
que se mide a lo largo del eje de revolución, como se ve en la figura 4.17.
Este significado geométrico de la g y la h quiere decir que nuestros resultados no van a depender de la posición particular de A1 en relación con
los ejes de coordenadas de E".
Como g y h son solamente funciones de u, ponemos
x" = (g', h' cos v, h' sen v)
E
=
g' 2
+
h'"
x, = (0, -hsenv,hcosu)
Aquí, E es el cuadrado de la rapidez de la curva perfil -y de todos los
meridianos (las curvas u-parámetro)- mientras que G es el cuadrado de
la rapidez de los paralelos (las curvas u-parámetro). ,\ continuación, tomernos
Xu
JI
Xn
X
X
Xv
Xv
1
= (hh', - hg' cos 1',
i = Y E(;
-
F"
-
hg' sen 1' 1
= h Y g'" + h'::_
Al tornar las segundas derivadas, obtenemos
Xun
= (g",h"cosv,h"senv)
Xuv=
(0,-h'senv,h'cosv)
270
OPERADORES DE FORMA
= (0, -hcosv, -hsenv)
Xvv
l = ( - g' h"
+ g" h') 1y g'" + h'"
m= O
=
n
y g'" +
g'h/
h'"
Puesto que F = m = O, se comprueba con facilidad ( ejercici'b 9 de la
sección 4) que, en el operador de forma S que se deriva ele U, se verifica que
S(xu)
l
=E Xu
(Es así como tenemos una demostración analítica de que los meridianos
y los paralelos de M son sus curvas principales.) En consecuencia, si denotamos las funciones correspondientes de curvatura principal por k,, y k~
(en lugar de k, y ke), tendremos
! g'
h'
1
g"
h"
1
_l
k
~
= --l
E
i,
-----
g'
n
k_=
.
---~-~
-------
h(g'2
(;
+
f¿'2)1/2•
( 1)
Por tanto, la curvatura gaussiana de l\1 es
h'
'u'
-a':
1
'"
_"_/rf_'_h"__'
K= k k = h(g'2
~
~
+
h'2)2.
(2)
Nótese que esta fórmula nos define K como función de valores reales,
definida en el dominio I de la curva perfil
a(u)
= (g(u), h(u), O).
Mediante lo que hemos convenido en la sección 4, K (u) es la curvatura
gaussiana K(x(u, v)) de todo jJUnto que se encuentre en el jJaralelo que
pasa por a (u) . Tenemos lo mismo con respecto a las demás funciones de
antes: debido a la simetría rotacional de /1.1 alrededor del eje de revolución, su geometría es "constante en los paralelos" y queda detc~minada
completamente por la generatriz.
En el caso especial en que la generatriz pasa no más de una c'CZ por cada
punto del eje, es habitual que podamos arreglar las cosas en relación
con la función g para que sea simplemente g(u) =u (ejercicio 13 del
capítulo IV, sección 2). Por lo tanto, las fórmulas anteriores se reducen a
k,,= (1
-h"
h'2)3/2
+
271
SUPERFICIES DE REVOLUCIÓN
(3)
- h"
K= !l(T+/?2)26.1
EJEMPLO.
Superficies de revolución
1) El toro de revolución T. La parametrización x del ejemplo• 2.6 c!el
capítulo IV tiene
g(u)
=
h (u) = R
r sen u,
+
r cos u.
Aunque el eje de revolución es aquí el eje de las z, las fórmulas ( 1) y ( 2)
anteriores siguen siendo Yálidas, y calculamos
l = r
k
F=O
G
m= O
n
1
~
+ rcosu)
= (R + r cos u)
=
(R
2
cos u
k= -~c:_o~
"
R +reos u
= r--
K=
r (R
cos u
r cos u) ·
+
Y, así, tenemos una demostración analítica de que K es pos1hva en la
mitad exterior del toro, y negatiYa en la mitad interior. De hecho, K tiene
su valor máximo 1/ r ( R + r) en el ecuador exterior (u = O) , y su valor
mínimo
-1/r(R- r)
en el ecuador interior (u = "), y K es cero en las circunferencias superior
e inferior (u = +r. /2).
2) Catenoide. La curva y= e cosh (x/e) es una catenaria; su forma
es la de una cadena que cuelga bajo la influencia de la gravedad. La
superficie que se obtiene cuando esta curva gira alrededor del eje de las x
se llama catenoide (figura 5.40). A partir de las fórmulas de (3), obtenemos
-k
=
1'
k =
"
1
-----:--::-:--~
e cosh 2 (u/e)
En consecuencia,
Puesto que su curvatura media H es cero, el catenoide es superficie
mínima. Si intervalo de curvatura gaussiana es -1/ c 2 <K < O, con el
valor mínimo K = - 1/ c 2 en la circunferencia u = O.
272
OPERADORES DE FORMA
El resultado siguiente nos hará ver que los catenoides son las únicas
superficies de revolución, comjJletast y no de planicie, que son mínimas.
(Un plano es trivialmente superficie mínima, puesto que k 1 =k~= 0.)
6.2 TEORE:.VIA. Si una superficie de revolución Af es superficie mínima,
entonces A1 está contenida o bien en un plano, o bien en un catenoide.
Demostración. Emplearemos la parametrización
x(u,v)
=
(g(u),h(u) cosv,h(u) senv)
de Af, donde u está en un intervalo I y v es arbitrario.
y
\
\
1
___ ,¡_ __ X
1
1
1
1
1
/
1
Figura 5.40
Caso J. g' es idénticamente cero. Entonces, g es constante, de manera
que .M ha ele ser parte de un plano ortogonal al eje de revolución.
Caso 2. g' no es nunca cero. Entonces, ele acuerdo con el resultado
ele un ejercicio anterior, Af tiene una parametrización de la forma
y (u, e') = (u, f (u) cos v, f (u) sen v) .
Las fórmulas ele k 1 y k 2 en el inciso (3) de las páginas 270-271 nos enseñan
que la condición de mínimos k 1 + kc = O equivale a
ff"
=
1
+ ¡'2.
Como u no aparece explícitamente en esta ecuacwn, hay un método
estándar para resoh-crla, que se encuentra en cualquier texto elemental
t Empleamos aquí esta palabra con el significado que le da el diccion:1rio;
daremos su definición matemática en la sección 4 del capítulo VII.
SUPERFICIES DE REVOLUCIÓN
273
de ecuacwncs diferenciales. Nosotros simplemente anotaremos que la solución es
donde a y b son constantes arbitrarias. Por lo tanto, l'vf forma parte de un
catenoide.
Caso 3. g' es cero en algunos puntos, y es distinta de cero en otros.
Esto no puede ocurrir. Para ser más concretos, vamos a suponer que
g'(uo) =O, aunque g'(u) >O para u< u 0 • Según el caso 2, la curva
perfil
a(u) = (g(u),h(u),O)
es catenaria para u < u 0 • Pero la forma de esta curva nos hace ver que
su pendiente h' / g' no se vuelve repentinamente infinita en u = Uo.
1
Los helicoides y los catcnoides son las superficies mínimas "elementales". Hay dos más en los ejercicios 12 y 21 de la sección 4. :t-.Iodelos
de películas de jabón de una enorme diversidad de superficies mínimas se
construyen con facilidad con el método que explican Courant y Robbins [4],
donde se explica la razón del término mínimo.
yg'
2
La expresión
+ h'", que aparece con tanta frecuencia en las
fórmulas generales del principio de esta sección, es, por supuesto, la
rapidez ele la curva perfil
a(u) = (g(u),h(u),O).
Por lo tanto, se simplifican de manera radical nuestras cuestiones si substituimos a por una rcparametrización de rapidez unitaria. La superficie de
revolución que obtenemos no cambia en nada: no hemos hecho sino darle
una nueva parametrización, de la que se dice es canónica.
6.3 LE;\IA. Si x es parametrización canónica de una superficie de revolución M (g' 2 + h' 2 = 1), entonces
E= 1,
F =O,
-h"
K=--h .
Demostración. Puesto que g' 2 + h' 2 = 1, estas expresiones ele E, F y G
se desprenden inmediatamente ele las de la página 269, y la K de (2) se
convierte en
274
OPERADORES DE FORMA
h' i
-g' g'
h
g"
- g' 2 h"
K=-- ...
Al diferenciar g' 2
h"
+
g' g" /¡'
h
1
= 1 - h' 2 obtenemos g' g" = - h' h"; en consecuenCia,
-(1- h' 2 )h"- h' 2 h"
K= ---- - -------
h"
1
/¡ .
h
El efecto de la parametrización canomca consiste en desplazar el
énfasis ele las medidas en el espacio exterior a M (por ejemplo, a lo largo
del eje ele revolución) a las medidas en el interior de la misma 1\1. Desarrollaremos más plenamente esta idea en los c:1pÍtulos VI y VII.
6.4 EJEMPLO. La parametrización canónica del catenoide
Una función ele longitud de arco de la catenaria
a (u)
=
(u, cosh u)
es
s (u)
=
(e
=
1).
senh u;
Figura 5.41
en consecuencia, una reparametrización de rapidez unitaria es
f3(s) = (g(s), h(s)) = (senh- 1 s,
y 1 + s")
como se indica en la figura 5.41. La parametrización canónica del catenoide
que resulta es, entonces,
x(s,v) = (senh-1 s, vT+---.;:-2-cosv, vT+~senv).
Por lo tanto, de acuerdo con el lem::t anterior,
h" (S)
h(s)
K(s)
-1
(T+~)".
Esta fórmula de la curvatura gaussiana en términos ele x es consistente
con la fórmula K(u) = -1/cosh" u, que obtm·imos en el ejemplo 6.1 con
respecto a la parametrización x. De hecho, puesto que s (u) = senh u,
tenemos que
K(s(u))
-1
-1
SUPERFICIES DE REVOLL:CIÓN
275
L:1 fórmula sencilla ele K en el lema 6.3 nos sugiere una manera de
construir superficies ele re\·olución con curvatura gaussiana prescrita. A
partir de una función ]{ en un inten·alo, empezamos por resoker la ecuación diferencial h" + !<..' h = O para h, a la que sometemos a las condiciones
iniciales h (O) > O y h' (O) < l. P;:¡ra obtener una par~mlCtrizaci(m c;:¡nÓmca, necesitamos tener una función g t;:¡l que g'" + h'" = l. Es evidente
que
j v1 ~u
g(u) =
h' 2 ( t) dt
()
nos valdrá para lo que queremos. Por lo tanto, en cu~dquier intcn·alo
alrededor ele! O Pn el que las condiciones h > O y 1 h' 1 < 1 se cumplan
amhas, poclrmos hacer qur
a(u)
=
(g(u),h(u),O)
gire alredp•lor del eje de las x para obtener una superficie de rcn1lución
con curvatura gaussiana que, por el lema 6.3, es precisamente - h" 1h = K.
6.5 EJl~:\lPLO. Superficies rle revolución con curvatura constante positiva. Aplicaremos el procedimiento anterior a la función constante
K = 11c 2 • L:1 ecuación diferencial h" + ( 11c 2 ) h = O tiene la solución
general
h(u)
=
a cos (;
+
b) .
La constante b representa simplemente una traslación de coordenadas;
hicn podemos suponer que b = O y que a > O. Por lo tanto, h;s funciones
g(u) = Jou
h(u)
.J'f 1 -
a"-2
c
sen 2 !_ dt
e
u
=a cose
clan lugar a una superficie de revolución ;Hu con curvatura ga~Jssi;:¡na
constante K = 11 c 2 • L;:¡s condiciones necesarias h > O y 1 h' 1 < 1 determinan el intervalo I dentro del que se dehe restringir u. La constante e se
mantiene fija en toda la explicación, pero la constante a queda a nuestra
disposición; vamos a considerar tres casos.
Caso l. a = c. Aquí
g(u )
Jof"
cos
u
7:t dt =e sen·~,
276
OPERADORES DE FORMA
y h(u) =ecos (u/e). El intervalo I es, por lo tanto, -"e/2 <u< ,.e/2.
Puesto que esta curva perfil a (u) = (g (u) , h (u) ) Ps una semicircunferencia, la revolución alrededor del eje de las .v produce la esfera ::S de radio e,
con la excepción de los dos puntos en el eje de las x.
Caso 2. O< a< e (figura 5.42). Aquí la h tiene un valor pos1t1vo
en el mismo intervalo que antes, y siempre se verifica que 1 1~ / < 1, de
manera que g está bien definida. La curva perfil u ~ (g (u), h (u) ) conserva
la misma longitud .. e/2, pero forma aquí un arco menos profundo, que
descansa en el eje de las x en los puntos +a'", donde
Se pueden encontrar valores aproximados de est:1 integr:1l elíptic:J. en
las tablas, pero aquí vemos con claridad que, cu:1ndo a disminuye desde
e hasta O, a'' se incrementa desde e hasta ,.c/2. La superficie de revolución
V
---e ...
, ...
//_
__,r.:-~
Figura 5.42
que se obtiene, Ma -que es redonda cuando a = e--, tiene al pnnClplO
la forma de una pelota de fútbol americano, y cuando a es pequeíio, es
una aguj;:¡_ de longitud apenas un poco menor que .. e /2. En contraste con
el caso 1, bs intersecciones con los ejes ( ±é·, O, O) no se pueden aíiadir
aquí a li1a, puesto que esta superficie tiene, de hecho, sus puntas agudas
en cada extremo. La ecuación diferencial h" + (1 ) h = O ha ajustado
delicadamente la forma de 1\fa, de manera que sus curvaturas principales
ya no son iguales y, sin embargo, siguen resultando en
V
a
1 __ _
~I/
1
1
Figura 5.43
277
SUPT:RFICIES DE REVOLUCIÓN
Caso 3. a> e (figura 5.43). Aquí, el intervalo 1 se ha reducido en
tamaño, puesto que la expresión deba jo del radical (en la fórmula de g)
se vuelve cero en los t* tales que sen ( f"/ e) = e) a < l.
Por tanto,
(t'') =
h(t*) =a cos \-;
V a2
-
e".
A medida que a se incrementa a partir de a = e, la superficie de revolución
lvfa que obtenemos Empieza a parecerse a la mitad exterior de un toro,
pero cuando a toma valores muy grandes, se convierte en una banda
circular enorme, con una curva de perfil muy corta que se curva agudamente. (k" ha de ser grande, puesto que k",....., 1/a es pequeño y k"krr =
ljr: 2 .)
Si hacernos un análisis parecido de la curvatura constante y negativa,
llegamos a una familia infinita ele superficies de revolución en las que
K = -1/ c2 .) El caso más sencillo ele éstos es el ele
6.6 E.JE:\IPLO. La tromj1eta B. La curva perfil ele B (en el plano
se caracteriza por es la condición geométrica: empieza en el punto (O, e) y se
mueve de manera que su tangente siempre llega al eje ele las x después
de recorrer una distancia exactamente igual a c. Así, esta curva (una
trilctriz) se puede definir analíticamente por medio de a (u) = (u, h (u) ) ,
=
u > O, donde h es solución de la ecuación diferencial h' = - hj -/~ 2
h2
tal que h ( :1) -e) e cuando u -e) O. (En la figura 5+1 se \T la superficie
de revolución que se obtiene.)
y
Generatriz
\
1
-~
z
Figura 5.44
278
OPERADORES DE FORMA
Por medio de esta ecuación diferencial, deducimos, a partir de las
fórmulas (3) de las páginas 270-271, que las curvas principales de B son
-h
1
k~= eh'·
k=-
"
e
Por consiguiente, la trompeta (o tractroide) tiene la
rurvat~ra negativa
constante
Esta superficie no se puede extender a través de su orilla (que no forma
parte de B) para obtener una superficie más grande en E 3 , puesto que
k" (u) -e) oo a medida que u -e) O.
Cuando se descubrió por primera vez esta superficie, parecía ser una
analogía, con K constante y negativa, de la esfera; por tanto, se le
designó pseudoesfera. Sin embargo, veremos en el capítulo VII que la
superficie verdaderamente análoga a la esfera es muy diferente de ésta, y
no se le puede encontrar en E 3 •
EJERCICIOS
1. Encuéntrese la curvatura gaussiana de la superficie que se obtiene
cuando gira la curva y = e-x'l 2 alrededor del eje ele las x. II{u.;asc un
bosquejo de la superficie y señálense las regwnes e11 que K > O y
K< O.
2.
(El signo de la curvatura gaussiana). Cuando y= f(x) g1ra alrededor
del eje ele las x y se expresa K en términos ele x, hágase ver que K
tiene el mismo signo (-,O, +) que - f" en cada valor de x. Por lo
tanto, K es positiva en los paralelos que pasan por intervalos com·e.-ws
de la generatriz, y negativa en los intervalos cóncavos, como se ve en la
figura 5.45. (El mismo resultado es válido en cualquier superficie arbitraria de revolución, cuando se toman la com·exidad y la concavidad
en relación con el eje de revolución A.)
3. (La magnitud de la curvatura gaussiana). Hágase ver que
k,, (u) = curvatura K (u) de la curva perfil a en a (u) ,
1 krr(u) 1 = h(u) 1 cos cp(u) l, donde cp(u) es el ángulo ele pendiente
de la generatriz en a (u) ;
1
1
en consecuencia, verifíquese que
IKI=KhlcoscpJ.
4. Se obtiene un toro elíptico }.1 cuando gira la clips"
(~- R)2/a 2
-f:
•y2/b 2
=
1
SUPERFICIES DE REVOLUCIÓN
279
K>O
~K=O~
\)
K< O
------------------A
K< O
------~~-----A
Figure 5.45
Figura 5.46
alrededor del CJe de las y (R >a). Encuéntrese una paramctrización
de 1\1 y calcúlese su curvatura gaussiana. (Verifíquese la respuesta al
tomar a = b = r.)
5. Si r = y x 2 + y 2 > O es b función coordenada polar habitual en
el plano xy, y si f es función difcrenciable, muéstrese que Af: z = f (r)
es una superficie de revolución, y que su curvatura gaussiana ( expresada en términos de r) es
K_
f'(r)f"(r)
- ;:(1+f'(r)2)2"
6. Encuéntrese la curvatura gaussiana ele la superficie Af: z = e··r'l 2 • Trácese esta superficie e indíquense las regiones en que K > O y en
que
O.
K<
7. Demuéstrese que una superficie llana de revolución es parte de un
cono o de un cilindro.
8. Sea ]l,f la superficie que obtenemos cuando gira un arco (- r. < t < r.)
ele la cicloide y(t) = (t +sen t, 1 + cos t) alrededor del eje de las x.
a) Calcúlese el valor de K en relación con la parametrización habitual ele M.
280
OPERADORES DE FORMA
b) Encuéntrese la función h al dar la altura de a en términos de
la longitud de arco (medida desde la parte superior el el arco).
Calcúlese K = - h" /h. (Indicación: Empléense semiángulos.)
e) Verifíquese la consistencia de los resultados de a) y b).
9.
(Suj;erficies
de
revolución
wn
cur<:·atura
crmstant:'
Jzt'r~atiua
K = - 1 / c 2 ) • Como teníamos en el caso de K = 1/ e",' hay una
familia de superficies así, divididas en dos subfamilias por una superficie especial. Las soluciones de
h" - h/ c2
=
O
que dan, por parametrización canónica, en esencia todas estas superficies son:
a) h(u) =a senh (uf e), O< a< e, u> O. Hágase \Tr qurc la curva
prrfil a (u) = (R( u), h (u)) parte del ongen con pendiente
a/'./~-;,---.:.:.. a 2 y se eleva hacia una altura máxima de V ~ 2-=-~z.
Trácese la superficie de rL'\~olución J[,, que resulta con un valor
prquefío del parámetro a y con un valor ele a pr{Jximo al de c.
b) h(u) = bcosh (u/e), b >O. Hágase ver que la cur\·a perfil a se
alza de manera simétrica (para +u) hacia una altura nüxima
v
de
c 2 ~+ b 2 • Hágase un bosquejo de la superficie Afu, que resulta
cuando b es pequeña y cuando b es grande.
e) h (u) = ce"'", u
O. Esta superficie B es simplemente nnagen
<
especular ele la superficie B que se obtiene a partir de
h(u) = ceu!c,
u> O.
IIúgasc ver que B es, de hecho, la trompeta (ejemplo 6.6) . ¿De
qué manera sep;na la superficie B las dos subfamilias, es decir,
lJiHa qué valores de a y b se 1xuecen ;U" y lvfb a B? (Véase la
figura 5.46. donde k[a y Afv se han trasladado a lo largo del eje
de revolución.)
7
Resumen
El operador ele forma S ele una superficie .Af en E" nos miele b rapidez de
variación ele una normal unitaria U en cualquier dirección en Af. Si
pensamos que U es b "primera derivada" de 1H, entonces S será la "segunda derivada". Pero el operador de forma es t;_:mbién un objeto ;:J.]gebraico que consiste en operadores lineales en los planos tangentes de JI Y
ha sido mediante el análisis algebraico de S que hemos llegado a las
principales invariantes geométricas de una superficie en E': sus curvatur;¡:;
y direcciones principales, y sus curvaturas gausswna y media.
CAPITULO
VI
Puesto que hemos aprendido la manNa de medir la forma ele una superficie Jovf en E", el paso siguiente consiste en ver cómo se relaciona la forma
de 1H con sus otras propiedades. Cerca de cada punto de ;\f, la curvatura
gaussiana tiene fuerte influencia en su forma (comentario 3.3 del capítulo V), pero lo que aquí nos interesa es b situación en grande, en la
totalidad de lt1. Por ejemplo, ¿qué diremos de la forma de .M si es compacta, si es llana o si es ambas cosas?
Hace casi 150 aílos que Gauss planteó una pregunta que dio comprensión nue\·a y mis profunda de lo que es la geometría: ¿que haY en la
geometría de una superficie en E 3 que sea independiente ele su forma?
A primera vista, la pregunta parece rara: ¿Qué diremos ele una esfera si
no tomamos en cuenta el hecho ele que es redonda, por ejemplo:' Para
entender un poco la pregunta ele Gauss, imaginemos que en la superficie
"H e E 3 hay habitantes que no ackierten el espacio que está fuera ele su
superficie y que, en consecuencia, no tienen idea ele su forma en E'l. De
cualquier manera, seguirán siendo capaces ele medir la distancia ele un
lugar a otro en Af, así como dcterminar las áreas ele regiones ele 1\1. En este
y en el siguiente capítulo, veremos que, en realidad, pueden construir una
"geometría intrínseca" ele Af que será más rica e igual ele interesante
que la geometría euclidiana del plano E 2, con la cual estarnos familiarizados.
Las ecuaciones fundamentales
Para estudiar la geometría de una superficie Jov1 en EO, aplicaremos los
métodos de CarL:m, brevemente descritos en el capítulo II. Como teníamos
en la teoría ele Frcnet de una curva en E 3 , para ello necesitaremos introducir sistemas ele referencia en )Vf con el fin de examinar sus rapideces
de variación cuando recorren M. Desde el punto de vista formal, un campo euclidiano de sistemas de· referencia en M e E 3 consta de tres campos
GEOMETRJA DE LAS SUPERFICIES EN E 3
282
Figura 6.1
vectoriales euclidianos (definición 3. 7 del capítulo IV) que son m·tonorrnales en cada punto. Este campo de sistemas de referencia se adapta a
de referencia en la totalidad de }.;f.
1.1 DEFIXICIÓN. "Cn campo adaptado de sistemas de referencia E1,
E 2 , E 0 en una región () de M e E" es un campo euclidiano de sistemas
de referencia con la propiedad de que E 3 es siempre normal a Af (con lo
cual E 1 y E" han de ser tangentes a 1\f) (figura 6.1).
Por lo tanto, el campo vectorial normal que denotamos en el capítulo
anterior por U se ha convertido aquí en E 3 • Para hablar con mayor brevedad, nos referiremos a un campo adaptado de sistemas de referencia
"cn Af", pero el dominio de definición es en general sólo alguna región ele
Af, puesto que no necesariamente existe un campo adaptado de sistemas
de referencia en la totalidad de }vf.
1.2 LEMA. Existe un campo adaptado ele sistemas de referencia en
una región () ele A1 e E" si y sólo si () es orientablc y existe un campo
vectorial no nulo en ().
Demostración. La necesidad de la condición es clara, puesto que E 3
orienta a O, y E1E 2 son campos vectoriales unitarios y tangentes. Para
examinar la suficiencia, orientemos () por medio ele un campo vectorial
normal y unitario U, y sea V un campo vectorial tangente que no se anule
en O. Pero, entonces, se ve con facilidad que
E 2 =U X E1,
u
es campo adaptado de sistemas de referencia en ().
1.3
EJEMPLO.
1
CamjJos adaptados de sistemas de referencia.
1) El cilindro j\;f: x 2 + y" = r 2 • El gradiente dc g = x 2 + y 2 nos lleva
al campo vectorial normal y unitario E 3 = (xU 1 + yU 2 ) jr. Es obvio
que el campo vectorial unitario U 3 es tangente a 1\1 en cada punto. Si
tomamos E 2 = U 3 X E 3 , obtenernos el campo adaptado ele sistemas de
referencia.
283
LAS ECUACIONES FUNDAMENTALES
E1 =
u3
_ -yU + xU
E 2 - - - -1- - - -2
r
_ xU1
E3-
+
yUz
r
en la totalidad del cilindro M (figura 6.2) .
2) La esfera .:S: x 2
unitaria hacia afuera
E
3
+
y2
+ z2
=
r. La normal
---
= zU 1 + yl_l 2_ + zU 01
r
está definida en la totalidad de :S, pero, como
veremos en el capítulo VII, todo campo vectorial
tangente en ~ se tiene que anular en alguna
parte. Por ejemplo, el campo vectorial que "apunta al este" V= -yU 1 + xU 2 es cero en los polos
norte y sur (0. O, -t-r). Por tanto, el campo adaptado de sistemas de referencia
Figura 6.2
E2 =E" X E1
E = xU1 + yU 2
3
r
+ zU3
(figura 6.3) está definido en la región () de .:S que se obtiene al e liminar
los polos norte y sur.
Figura 6.3
284
GEOMETRÍA DE LAS SUPERFICIES EN E 3
En particular, el lema 1.2 implica que hay un campo adaptado clt· ,¡stemas ele referencia en la imagen x (D) ele cualquier carta dt>n tro de
M; por tanto, esos campos existen localmente en cualquier superficie de E 3 •
A continuación, haremos intervenir las ecuaciones de conexión (teorema 7.2 del capítulo II) en el estudio de una superficie JI ele E 3 . Sea E1,
E 2 , E 3 , un campo adaptado de sistemas de referencia en lv!. Al m@lver cada
sistema de referencia E 1 ( p) , E e ( p) , E 3 ( p) por un intervalo corto en la
recta normal en cada punto p, podernos extender el campo de sistemas
de referencia que se nos ha dado a otro, que esté definido en un conjunto
abierto ele E3 • Por tanto, las ecuaciones de conexión
quedan a nuestrc alcance para su utilización. Solamente las ajJlicaremos
a vectores v tangentes a 1\f. En particubr, las formas de concxzon '"'ii se
convierten en 1-fmmas en }vf, en el sentido de la sección 4 del capítulo IV.
Es así como tenernos
1.4 TEORL:\IA. Si E\, E 2 , E 3 es un campo adaptado de sistemas de referencia en JI e E" y si v es tangente a A1 en p, entonces
3
\lvEi
= 2; w;i(v)Ei(P)
(1 <i<3).
jcl
La interpretación habitual ele las formas ele conexión se ke en estas
ecuaciones. y bien podemos repetirla: "'ii (v) es la tasa inicial con que E i
se mue·ce en rotación hacia Ei cuando p se mueve en la direcrión v. Puesto
que Es es campo vectorial normal y unitario en A1, el operador ele forma de 1H queda descrito por las formas ele conexión.
1.5 CoROLARIO. Sea S el operador de forma que se obtiene a partir
de ~·:o, donde E1, Ez, E 3 es un campo adaptado ele sistemas ele referencia
en A1 e E". Entonces, para cada vector tangente v a /11 en p,
S(v) = "'B(v)E1(p)
+w
23
(v)Ez(p)
Demostración. Por definición, S ( v) = - \7 vE3 • Por tanto, la ecuación de conexión para i = 3 nos da el resultado, pues la forma de cÓnexión
w = ( úlij) es antisimétrica: "'ii = - "'ii·
1
Además de sus formas de conexión, el campo adaptado ele sistemas de
referencia E\, Eo, E.J tiene también 1-formas duales 8 1 , 8 2 , 8 3 (definición 8.1
del capítulo II) que clan las coordenadas B;(v) = v•E;(p) de cualquier
vector tangente vP con respecto al sistema de referencia E 1 (p), E2 (p),
E e (p). Como teníamos con las formas de conexión, las formas duales se
:tplican solamente a vectores tangentes a lv1, de manera que se convierten
LAS ECUACIONES
FUNDAMENTALI·~S
285
en formas en M. Esta restricción resulta fatal para él:), pues si v es tangente a ;11, ha de ser ortogonal a E 3 , de manera que e,.,(v) = v•E 3 (p) =O.
Por lo tanto, el es idénticamente cero en jf.
Gracias a la asimetría de la forma ele conexión, nos quedan, en esencia, sólo cinco formas:
constituyen una descripción dual de los campos \TCtoriales
tangentes E,, E~
da la tasa de rotación ele E 1 , E~
describen el ope1·ador de forma que se deriva de E"
1.6 EJE3V1PLO. La esfera. Consideremos el campo adaptado de sistemas
de referencia E1, Ec, E 3 definido en la esfera ~ (doblemente agujerada)
del ejemplo 1.3. Si extendemos este campo ele sistemas de referencia a
un conjunto abierto de E 3 , obtenemos el camjJo esférico de .1istemas de
referencia que vimos en el rjemplo 6.2 del capítulo II, si entendemos que
los índices del segundo se desplazan en 1 ---'> 3, 2----:> 1, 3---'> 2. Por lo tanto,
en términos ele las funciones coorclrnadas esféricas, el ejt>mplo 8.4- del
capítulo II nos dice que
e
= r cos
1
01 1 c
=
St'n
cp d()
'P d{}
011 3
= -cos cp d{}
Puesto que todas las formas (inclusiYe las funciones) se han restringido aquí a la superficie ::S, la función coordenada esférica p se ha convertido en función constante: el radio r de la esfera.
En general, tenemos que las formas que se asocian a un campo adaptado
de sistemas de referencia se rigen por el notable conjunto de ecuaciones
que enunCiaremos a continuación.
1.7 TEORE:\IA. Si E,, Ec, E 3 es campo adaptado de sistemas de referencia en jf C E', entonces sus formas duales y formas de conexión en M
cumplen las igualdades
l. {del=
dOc =
2.
4
w31
_
J
l
A
0112 1\
02
A
tl1
(•> 2 1
01
+
0132
A
dw13
=
0112
A
W23
dwz3
=
Wzl
A
Wl3
02 = 0
Demostración. No haremos más que aplicar las ecuaciones estructurales del teorema 8.3 del capítulo II. La primera ecuación estructural
dO;=
¿Wij A
j
Oi
286
GEOMETRÍA DE LAS SUPERFICIES EN E 3
nos resulta en las igualdades ( 1) y ( 2) que acabamos de enunCiar. Si. de
hecho, i = 1, 2, obtenemos ( 1), puesto que ()" = O en la superficie Af. Pero
(} 3 = O implica que d(J 3 = O, de manera que, para ¡ = 3, obtenemos (2).
A continuación, tenemos que la segunda ecuación estructural resulta
en las ecuaciones de Gauss ( 3) y de Codazzi (4) .
Puesto que las formas de conexión son antisimétricas, y el p~oducto
exterior de 1-formas cumple la igualdad 1> A tf; = A q>, bs ccuztciones
fundamentales anteriores se pueden \"OhTr a expres;1r en una clinTsiclad
de maneras equivalentes. Sin embargo, nosotros nos aprgarcmos a los diseños indiciados que hemos empleado que, en conjunto, parecen ser los
mfts fáciles de recordar.
Insistiremos en que las formas que hemos definido en esta sección no
describen directamente h superficie "H, sino solamente ri campo acl<1ptado
de sistemas de referencia E 1 , E", E 3 en particubr, del que se derivan: al
elegir otro c<1rnpo de sistemas de referencia, se obtendrán formas diferentes. De cualquier manera, las seis ecuaciones fundament0lcs del t eorema l. 7 contienen una canticlacl enorme de información acerca de la superficie A1 e E", y acudiremos por turnos a cada una a medida que nos
encontremos en situaciont's geométricas gobernadas por ellas. Por cjc>mplo,
puesto que ,oJ 1 :1 y w 23 describen el operador de forma ele ,H, las cnnciones
de Codazzi ( 4) nos expresan la tasa con e¡u e la forma de A1 cambia de
uno a otro punto.
En el primero de los ejercicios siguientes veremos la manera en c¡ue el
punto de vista de Cartan nos señala automáticamente los tres tipos ele curvas
que estudiamos en el capítulo V, sección 5.
v
EJERCICIOS
1. Sea a una curva de rapidez unitaria en A! e E 3 • Si E 1 , Ee, E, es un
campo adaptado de sistemas ele referencia tal que E 1 restringido <1 a
es su tangente unitaria T, hágase \'er c¡ue
a) ex es geodésica de .A1 si, y sólo si, c0¡c(T) =O.
b) Si E,3 = E 1 X E", entoncrs
g=w12(T).
k=
w1
c(T),
donde g, k y t son las funciones definidas en el ejercicio 7 de V.5.
(Indicación: Si T
a lo largo ele a.)
=
E, a lo largo ele a, entonces Ei' ~=
'V FJ Ei
1
287
CÁLCULOS CON FORMAS
2. (Esfera). Con respecto al campo de sistemas de referencia del CJCmplo 1.6:
a) Verifíquense las ecuaciOnes fundamentales (teorema 1.7).
b) Dedúzcase, a partir de las fórmulas de () 1 y e~, que
Et[O]
=
1/r cos rp
E,[rp] =O
E2[0]
=
O
E~[rp]
= 1/r
e) Aplíquese el corolario 1.5 para encontrar el operador de forma S
de la esfera.
3. (Toro). Sea E 1 , Ec, E" el campo adaptado de sistemas ele rcfETcncia
en el toro T (radios R > r) tal que Ec es tangente a los meridianos y
E 1 es tangente a los paralelos, como se ve en h figura 6.4. Aplíquese
el campo toroidal de sistemas de referencia en E' para obtener
el =
el =
(R
+
r cos 'P) dO
z
r drp
w12
= sen <p dO
úll3
=
-
cos
<p
d{}
y
Verifíquense las ecuac10ncs
fundamentales con respecto a
estas formas.
Figura 6.4
4. (Continuación). :Mediante los métodos de esta secC!on, calcúlense
S(E1) y S(E2 ) con el campo de sistemas de referencia anterior. Dedúzcase que los meridianos y los paralelos son cun·as principales, y encuéntrense las funciones ele curvatura principal. (Compárese esto con el
ejemplo 6.1 del capítulo V, donde la normal unitaria va "hacia
adentro".)
5. Empléese d campo cilíndrico de sistem::ts de referencia en E 3 (ejemplo
6.2 del capítulo II) para calcular el operador de forma en el cilindro
A1: x 2 + y2 = r 2 •
6. Elabórese una nueva demostración ele la simetría ele los operadores ele
forma por medio de la ecuación ele simetría (teorema l. 7) .
-
2
Cálculos con formas
De aquí en adelante, haremos nuestro estudio ele la geometría ·ele bs superficies sobre todo en términos .de formas diferenciales, de manera que tal
GEOMETRÍA DE LAS SUPERFICIES EN E 3
vez el lector quiera repasar sus propiedades generales, que describimos en
las secciones 4 y 5 del capítulo IV. liaremos comparaciones cada vez m{ts
frecuentes entre M y el plano euclidiano E 2 • Por lo tanto, si F 1 , Ec. E:; es
campo adaptado de sistemas de referencia en M C ES, decimos que E1, Ez
constituye un campo tangente de sistemas de referencia en 1\1. Cu<1lc¡uier
campo vectorial tangente V en M se podrá expresar en términos ele l~1 y E2
por el desarrollo ortonormal
Para ver que dos
valores en todos
vectoriales "base"
IV.) De manera
formas son iguales, no es necesario que verifiquemos sus
los vectores tangentes, sino solamente en los campos
E1, E e. (Véase lo dicho antes del ejemplo 4. 7 del capítulo
explícita: las 1-formas </> y tf¡ son iguales si, y súlo sz,
<J>(EJ = tf¡(Ee);
y
las 2-formas v y v son iguales si y sólo si
Las formas duales e1 , e" son, como ya hemos dicho insistentemente, nada
más una descripción adicional del campo tangente ele sistemas ele referencia E 1 , E 2 ; quedan completamente caracterizadas por las ecuaciOnes
( 1 "5. i, j < 2) .
Estas formas constituyen una "base" ele las formas en A1 (o, en un sentido
estricto. ele la región ele definición ele E 1 , Ec).
2.1 LEMA. (Las fórmulas de las bases). Sean e,, e2 las 1-formas duales
de E,, E" en fi,f. <J> es una 1-forma y si p. es una 2-forma, entonces
1) 1) = <J>(El) 01 +</>(E")
2) v = ,u(E,, E2) 01 1\ e"
e"
Demostración. Aplíquense los criterios anteriores ele igualdad, y obsér\·esc, en (2), que, por definición de producto tilde,
(e, 1\ e") (F,,E") = e,(E,)Oc(EJ
=1·1-0·0=1.
el(Ec)ec(E,)
1
Supondremos continuamente que las formas 0 1 , e", w 12 , w13 , we 3 se derivan de la manera que vimos en la sección 1 de un campo adaptado de
sistemas de referencia E 1 , E 2 , E, en una región de A1, para ver el aspecto
que adquieren algunos de los conceptos que definimos en el capítulo V
cuando los expresamos en términos de formas. Empezaremos con esta analogía del lema 3.4 del capítulo V.
289
CÁLCULOS CON FORMAS
2.2 LEMA.
1) w13 1\ Wc3 = KB1 1\ &.z.
2) w13 1\ B.2 + e, 1\ wc3 = 2HB 1 1\ Be.
Demostración. Para aplicar las definiciones K = det S, 2H = traza S,
encontraremos la matriz de S con respecto a E 1 y E 2 • Como en el corolario
1.5, las ecuaciones de conexión resultan en
Por lo tanto, la matriz de S es
Ahora bien, de acuerdo con la segunda fórmula del lema 2.1, lo que debemos exhibir es que
y
Pero
determinante ele la matriz ele S
=
clet S =K
y obtenemos la fórmula de la traza con cálculos parecidos.
1
Cuando comparamos la Jlrimera de las fórmubs anteriores con la ecuación ele Gauss ( 3) del teorema l. 7, obtenemos el
2.3
CoROLARIO.
d"> 12
=
-
KB 1
1\
Be.
Diremos que ésta es la segunda ecuación estructural,t y declucit'f'mos de
ella una nue;.~a interpretación de h curvatura gaussiana: "''"mide la rapidez
de rotación del campo tangente ele sistemas de referencia h',, E 2 , y, puesto
que K dett:Tmina la derivada exterior d,,,, 2 , se vuelve una especie de
"segunda derivada" de E,, E 2 •
Por ejemplo, en una esfera ::S de radio r, las fórmulas del ejémplo 1.6
resultan en
B1 1\ Be
=
r 2 cos 'P d{} d<p
=
re cos 'P d<p d{}.
Pero
dw12
= d(sen<pd{}) = d(sen<p)
1\ rW
= cos<pd<pdff.
t Veremos que esta ecuación constituye una analogía para M de la segunda
ecuación estructural (teorema 3.3 del capítulo JI) en E''.
290
GEOMETRÍA DE LAS SUPERFICIES EN E 3
Y es así como la segunda ecuación estructural nos ha dado el result;:,clo
que esperábamos, K= 1/r".
Podemos expresar de otra manera esta nueva descripción de curvatura.
Demostración. De acuerdo con el lema 2.1, tenemos que
donde
para i
1, 2.
=
Entonces,
dw1z = d{! A 01
=
d[i A
01
+
+
dfz A Oz
dfe A
()2
+ f1
+j
d() 1
1l1>1e
+
A
f 2 dOc
Oz
+
f:,o>n A () 1
donde hemos aplicado las primeras ecuacionc·s estructurales (teorema l. 7).
Aplicaremos a continuación esta fórmula a F,, E 2 • Puesto que ()i(l"-'i) = 8ii,
obtenemos
En consecuencia, por medio del corolario anterior concluimos que
que, por la definición de
f 1 y f2
1
es el resultado que buscábamos.
Por ejemplo, calculamos con facilidad, a partir del ejemplo 1.6, que
y
Entonces, en relación con la esfera, la fórmula :mterior nos da
sec 2 'P - tan 2 'P
,,,
r-
puesto que, por el ejercicio 2 de la sección 1, teníamos que
2
E e[tan 'P ] = sec 2 'P E z['P ] = -sc·c 'P .
r
En la sección 1 hicimos hincapié en que los campos adaptados de sistemas ele referencia en ,\f C E', en general, dan solamente información
indirecta acerca ele A1. Si uno de esos campos ele sistemas ele referencia
nos diera información geométrica directa, tendría que habérsclc deducido
ele manera natural ele la misma geometría de 1\1, como sucedió con el
campo ele sistemas de referencia ele Frcnet con respecto a una curva. IIay
una manera de hacerlo :
CÁLCULOS CON FORMAS
291
2.5 DEFINICIÓN. Un camjJo principal de sistemas de referencia en
)'\1 e E" es un campo <1dapt<1do de sistem<Js de referencia E 1 , E 2 , E,, con la
particubridad de que, en cada punto, E 1 y E 2 son vectores principales de M.
J\1icntras el dominio de definición no contenga puntos urnbilicales,
tendremos que un campo principal ele sistemas de referencia estará
determinado de manera única -con la excepción de los cambios ele signo-por bs dos direcciones princip;tles en cada punto.
A veces, n·sulta posible obtc·ner un c<1mpo principal de sistcm;1s de
rderencia en una superficie completa. Por ejclllplo, en una SUlJl'rficie
de rc\'olución, podernos tomar 1:' 1 tangente a los mnidi;1nos y E 2 tangente
a los paralelos. En general, sin embargo, lo mús que podemos h:HTI' es lo
que enunciaremos en seguida.
2.6 LUL\. Si p es un punto no umbilical de Af e E", entonces existe
un campo principal de sistcm:-ts ele referencia en alguna vecindad de p en Af.
Dcmostrari<5n. Se<1. F,, F:c. F;, un campo adaptado de sistemas de referencia que escogemos arbitrarizancnte r·n una vecindad 'Jl de p. Puesto
que p no es punto umbilicct!, podemos suponer (si hacemos girar F,, F 2
en caso ele resultar neces<Jrio) que F 1 (p) y F 2 ( p) no son vectores principales en p. Por hipótesis, k,(p) =fck 2 (p); en comecuencia, por continuidad,
k 1 y k 2 siguen siendo diferentes en l<1s cercanías de p. En una \TCinclacl
suficic·rllenicntc pec¡ucl'ía ~JI de p, tendremos, por consiguiente, que todas
estas condiciones son cfecti\·;ts.
Sea Sij b matriz de S con respecto a F 1 , F 2 • Se reduce a un problema
c·;;tZi.ndar ele úlgebra lineal el cálculo --·IÍmultáneo en todos lm jmntos de
."77
dr~ los vectores característicos de S, es decir, los vectores principales
ck Jf. De hecho, en c:-tda punto, los campos ;,-cctorialcs t;mgentes
cleterruinan vectores c<Jracterísticos de S. (Esto también lo puede \Trificar
e! lector con d.lculos directo.-., si no le agrada recurrir al úlgebra lineal.)
Además, la función .5\ 2 = S!F,)•F 2 no es nunc:c cero en la \Tcinclacl que
lH'tnm escogido,
de ;nanera que :':V,',] y ]1 Vz ji no son nunca cero. En
ccnsec:m·ncia, los campos vectoriales
:n,
consis!cn solawente en \-cctores ptincipaks, dc· mancr;c que H1 , E 2 , ¡,·.,
es un campo principal de sistemas de referencia en ~JI.
F,
1
292
GEOMETRÍA DE LAS SUPERFICIES EN E
3
Si E 1 , E 2 , E.: es campo principal de sistemas ele referencia en l'vf, entonce~
los campos vectoriales E 1 y E 2 constan ele vectores característicos del operador de forma que se deriva de E 3 • Por lo tanto, podemos denominar
las funciones ele curvatura principal de manera que S (R 1 ) = kJ~' 1 )
S (Ec) = k 3 L' 3 • La comparación con el corolario l.j nos resulta en
">1" (E1)
úlc3
= kl
(El) =0
(•)¡" (
¡;;") =0
"'"" ( ]~") =
k c.
Por tanto, la fórmula ( 1) de las bases del lema 2.1 nos dice que
Esto nos lleva a una versión interesante de las ecuac10nes de Codazzi
2.7 TEOREMA. Si E 1 , E 2 , E 3 es campo principal de sistemas de rcfe·
rencia en Jvf C E", entonces
E1[kc]
Demostración. Las ecuaciones ele Codazzi ( lt'orema l. 7) se leen com(
La demostración se reduce, a partir de aquí, a un ejerncro de cálculo:
de formas que c·xplicamos en el capítulo IV, sección 4. ,\1 substituir h
correspondiente en la pnmera de estas ecuaciones, a partir de ("'), obte
nernos
en consccuenoa,
Si tomamos en cuenta la ecuación estructur;ll d0 1
,·ierte en
=
ü> 12 1\ () 3 ,
esto se con
Apliquemos a continu;1ción estas 2-formas al par ele campos \CCtoriale
E,, E 2 para obtener
en consecuenCia,
La otra ecuación que necesitamos se deduce ele la misma manera de L
ecuación ele Codazzi dü>c3 = úle1 1\ úlJe1
293
CÁLCULOS CON FORMAS
Observemos que, en un campo principal de sistemas de referencia,
nos dice la manera en que las direcciones principales cambian en
la dirección v.
w1 e(v)
EJERCICIOS
1. Verifíquense las ecuaciones de Codazzi ( tcon'ma 2.7) con rt'spccto
al campo principal de sistemas ele referencia en el toro que se definió
en el ejercicio 3 de la sección l. (Indicacic!n:
V
[1] = fY[tJ ::-l!Jg1.
R
gz
'
podemos encontrar las derivadas de {} y cp con respecto a E 1 y Ez a
partir ele las fórmulas de (} 1 y () 2 de este ejercicio.)
2. Si E,, E2, E,1 es un campo adaptado de sistemas de referencia en lvf
en que E1•E 2 X E 3 = 1, sea
h;(p)
=
p·E;(p)
para z = 1, 2, 3.
En particular, tenemos que h 3 es la función soporte h de M que definimos en la página 251. Hágase ver que
(Indicación: En un sentido estricto, h; = X·E;, donde X es el notable
campo vectorial cuya es la propiedad de que \7 1.X = V, que también
in tcrviene en la página 251.)
Hay una regla no muy precisa para calcular derivadas exteriores ele
1-formas en términos ele un campo adaptado de sistemas ele referencia:
se expresa la forma en términos ele () 1 y () 2 (o tal vez "' ii) ; a continuación, se
aplica d y se recurre a las ecuaciones fundamentales. La demostración
del teorema 2.7 es un ejemplo de esta manera de proceder; otro ejemplo
es el siguiente.
3. (Continuación).
a) Si ,Y es la 1-forma con la propiedad de que tf; (v)
exhíbase la validez ele
donde h es la función soporte.
p•v X E"(p),
294
GEOMETRÍA ·DE LAS SUPERFICIES EN E 3
b)
Si~
~(v) =
es la 1-forma tal que
d'
2(H
=
+ hK)
(Indicación: tf; = h 1 O"- h 2
3
(} 1 ,
tf;(S(v) ), hágase ver que
()1 /\ ()".
y !; tiene una expresión parecida.)
Algunos teoremas globales
Hemos afirmado constantemente que el operador de forma S constituye
una analogía en una superficie 1H de la curvatura y la torsión en una curva
en E". Al hacer suposiciones sencillas acerca de K y , se seílalaron algunos
tipos especiales de curvas. Veremos a continuación lo que podemos h:tcer
por medio de S en el caso de las superficies. (Recordemos que trabajamos
exclusivamente con superficies conexas.)
3.1 TEOREMA. Si su operador de forma es idénticamente cero, entonces A1 es (parte de) un plano en E 3 •
Demostración. El procedimiento de demostración se parece al que
sirvió para el corolario 3.5 del capítulo II. Por clcfiniciún de operador
de forma, S = O significa que cualquier campo vectorial normal y unit:lrio E 3 en 1\1 es euclidianamente paralelo; por lo tanto, se le puede identificar con un punto de E". Tómese un punto fijo p en JI. Veremos que
!vi descansa en el plano que pasa por p y es ortogonal a E 3 • Si q es un
punto arbitrario de lvf, entonces, debido a que 11i es conexa, existe una
curva (lé en j f que va de a(O) = p a a(l) = q. Consiclnemos la función
f(t)
=
(a(t) - p) •E;;.
Ahora bien,
_df = a'•E =O
dt
en consecuenCia,
f
."
y
f(O) =O;
es idénticamente cero. En particubr,
f (l) = (q
- p) • T:3
=
o,
de manera que todo punto q de }.1 está c!Pntro del plano que pedimos
(figura 6.5) .
1
Yimos en el capítulo V, SPcción 3, que el requ!Slto de que un solo
punto p de Af C E'3 sea de planicie (k 1 = k 2 = O, o, lo que es equivalente,
[{ = O) no tiene efectos significativos en la forma de JI cerca de p. Pero
lo que el result;1clo anterior nos enscíla es que, si todo punto es llano,
entonces .i\f es parte de un plano, en realidad.
Después de la hipótesis del teorema anterior, 1:11 \TZ la mús sencilla
.:~:re:: de WIJ
superficie Al en E ~e:¡~ <:ü cada
pu11Ío
p,
d
OJlf'r::dur efe
295
ALGUNOS TEOREMAS GLOBALES
M
p
Figuro 6.5
forma no es más que la multiplicación escalar por un número, q11e tal \"CZ
depende a jn iori dC' p. Esto significa que 1\1 será totalmente umbilical, es
decir, que constará enteL;mentc de puntos umbilicales.
Si )\[ es una superficie tot~1lmcnte umbilical en E 3 , entonces
M tiene cun·atura gaussiana constante K 2 O.
3.2
Lr:\IA.
Demostración. Sea E,, Ec. E, un campo adaptado de sistemas de referencia en una región (! de Af. Puesto que 1H es totalmente umbilic:1l, las
funciones ele cun alura principal en (J son iguales, k 1 = k e = k, y además,
E t. Ec, E, es, en realidad, un campo principal ele sistelll:ts de referencia
(puesto que toda dirección en Af es dirección principal). Por lo t:mto,
podemos aplicar el teorema 2.7 para concluir que E 1 [k] = Ejkj = O.
También poclrbmos poner
de manera que, por el lema 2.1, dk = O en (). Pero K = k 1 k 2 = k 2 , de
modo que dK = 2k dk = O en (). Puesto que todos los puntos ele 1\f quedan dentro ele una región como O, concluimos que df{ = O en toda Jo.f.
Se desprende ele un ejercicio antrrior que K es constante.
1
3.3
TEoREl\IA.
Si l\f C E·' es totalmente umbilical y s1 ](
> O,
en-
tonces M es parte de una esfera en E 3 ele radio 1/ ..¡K~
Dennstrrn icin. (Aquí, nuestro procrdimiento se parece al del lema 3.6
del capítulo ll.) Escojamos fortuitamente un punto p en Jf y un vector
norm;d y unitario F:;(p) a JI en p. Dcmoslrarenws que el jnmto
e= p
+
1
E3(p)
k(p)
., t·,
'·1''·)
296
GEOMETRÍA DE LAS SUPERFICIES EN E 3
Sea a continuación q cualquier punto de A1, y sea a de un segmento
de curva en M que va ele a(O) = p a a( 1) = q. Extendamos E" (p) a
un campo vectorial normal y unitario E 3 en a, como se 'ie en la figura 6.6, y tomemos la curva
1
Y =a+-E
k 3
.
Aquí hay que entender que la función ele curvatura principal k se
deriva de E 3 y que, por lo tanto, k es continua. Pero K = k~ y, de acuerdo
con el lema anterior, K es constante, por lo cual k es también constante. En
consecuencia,
k
Y '=~'+ -~E'
~
3.
Pero
Es'= -S(a')
-ka',
Ea
Ea(p)
Figura 6.6
debido a que, por la hipótesis ele umbilicaliclad total, S es multiplicación
escalar por k. En consecuenCia,
y' = a' +
i
(-ka') = O,
De manera que la curva y ha de ser constante. En particular,
e= y(O) = y(1) = q
+ ~E3(q)
por lo cual d (e, q) = 11 k para todo punto q ele lvf. Puesto que K =
k 1 k 2 = k 2 , hemos exhibido que lvf está contenida en la esfera con centro
en e y ele radio ·1 1VI(
1
ALGUNOS TEOREMAS GLOBALES
297
Si aplicamos los tres resultados anteriores, concluimos que una su jlerficie .M en E 3 será totalmente umbilical si y sólo si ji.J es jJarte de un jJlano
o de una esfera.
3.4 CoROLARIO. Una superficie compacta y totalmente umbilical Af
en E" es una esfera completa.
Demostración. Según el comentario anterior, deducimos del teoH:ma 7.6
del capítulo IV que A1 ha de ser un plano completo o una c~Jcra completa. Lo primero es imposible, puesto que j [ es ~por hipótesis---· compacta, y los planos no lo son.
1
La cun·atura gaussiana sirvió en los resultados anteriores sobre todo
gracias a que está bien definida y es diferenciable en toda Af, y, por consiguiente, resulta más fácil trabajar con ella que con las curvaturas
principales.
A continuación, vamos a harer un estudio más serio de la curvatura
gaussiana K de una superficie l\1 e E".
3.5 TEOREMA. En toda superficie compacta }.1 en E 3 , hay un punto
en el que la curvatura gaussiana ]{ es estrictamente positiva.
Demostración. Consideremos la función f, ele ,-;¡]ores re;¡]es y clcfinicb
en 1\1, tal que f (p) = 11 p
Por lo tanto, en términos de bs coorclen;¡das
natumles ele E", f = ~X¡~. Ahora bien, f es clifcrenciZ~ble, y en consecuencia, continua, y Af es compacta. Por consiguiente, según el lema 7.3 del
capítulo IV, f toma su valor máximo en algún punto 111 ele 1\f. Puesto
que f miele el cuadrado de la distancia al origen, m es simplemente un punto
de M situado a la distancia máxima r = 11m [ > O desde el origen. Es
intuitivamente claro que lvf es tangente en p a la esfera ::S de radio r, y
que A1 está en el interior ele ::S, y, en consecuencia, está más curvada que
::S (figura 6. 7). Es así como esperamos que K (m) > 1/ r~
O. Vamos a
demostrar esta desigualdad.
Dado cualquier vector unitario u, tangente a A1 en el punto múximo
m, tomemos una curva a de rapidez unitaria en Jf tal que a(O) = 111,
a' (O) = u. De la deri\·;¡ción de m se desprende que la función compuesta
fía) tiene también su máximo en t = O. Por tanto,
W·
1
>
d
d1
(fa) (O) =O,
d2
dt;, (fa)
d
Pero f(a) = a•a, de manera que-~- (fa)
dt
encontramos que
O = rl_(fa) (O)
dt
( 1)
(O) <O.
2a (O) •a' (O)
2a•</. Al evaluar en t
2m•u.
=
O,
298
GEOMETRÍA DE LAS SUPERFICIES EN E 3
Figura 6.7
Como u era 1111 vector unitario cu:llquicr:1, tangente
nifica que n1 (considerado como vector) es normal
;¡
;¡
1\! en n1, esto sigJI l'll m.
Si volvemos a difcrenci:1r. obtenemos
r/2( fa)
=
dt"
Por ( 1), en t
=
O esto resulta en
O 2:: u • u
=
1
+m
+m
• a" (O)
(2)
• a" (O) .
Lo que dijimos antes nos enseña que podemos emplear n1jr como vector
unitario normal a 111 en 111, como se ve en la figura 6.8. Por lo tanto,
(m/r)•a" es prrcisamcnte la cmTatura normal k(u) de 1H en la clircc-
m/r
t
1
.,;
.
:;¡;
'
fl)l
.• :
1
------
1
)f':· \\ .¿\i~~>
.; : \;f;~: ~·
'
1
¡
!
¿
o
~igura
6.8
ALGUNOS TEOREMAS GLOBALES
299
ción u, y de ( 2) se desprende que k (u) < - 1/ r. En particular, ambas curvaturas principales satisfacen la desigualdad, de manera c¡ue
1
K(m) >->O.
- r"
1
Por lo tanto, no hay sujJerficies comp(lctas en
E" con K;:?= O.
Si conservamos la hipótesis ele superficies compactas, poclt·JilOs considerar el efecto que tiene la condición de constancia de b cUlTatura
gaussiana. El teorema 3.'i nos ensella que la única posibilicbd es ]{ > O.
Las esferas son un ejemplo obvio de superficies compnctas en E·' con curvatura gaussiana constante y positiva. Uno ele los resultados más notables
de la teoría ele las superficies es que son las únicas superficies así. Para
demostrar esto, necesitaremos obtener antes un resultado preliminar bastante profundo.
3.6 LEMA (Hilbert). Sea m un punto de A1 CE' tal que
1) k, tiene un máximo local en n1.
2) k2 tiene un máximo local en m.
3) k,(m) > k~(m).
Entonces K(m) :::=:O.
Por ejemplo, se ve con facilidad que estas hipótesis se cumplen en
cualquier punto del ecuador interior de un toro o en la circunferencia
mínima (x = O) del catenoide. Y K es, ele hecho, negntivo en los dos
ejemplos.
Para convertir las hipótesis ( 1) y (2) a una forma que sea susceptible de
usar en la demostración que haremos en seguida, recordaremos algunas
cuestiones acerca de los máximos y los mínimos. Si f es una función ( diferenciable) en una superficie "U y V es campo vectorial tangente, entonces
la primera derivada V[fl yuclve a ser función en i\1. Es así corno podemos
volver a aplicar nuevamente V para obtener la segunda clcri,·acla T·rv[!JJ =
VV[f]. Con cálculos directos, vernos que si f tiene un máximo local en un
punto m, entonces las condiciones análogas a las que son habituales en
el cálculo elemental se cumplen, a saber,
V[f] =O,
FV[fl :::; O
en
111.
En un mínimo local, por supuesto, la dcsigualclacl se invierte.
Demostración. Puesto que kdm) > k 2 (m), m no es un punto umbilical, y existe, por el lema 2.6, un campo principal ele sistemas de referencia
E 1, E 2 , E 3 en una yecindad de 111 t'll jf. Por el comentario anterior, las
hipótc>ic: de tener múximo y míuimo en m iwplic;m, en particular, que
300
GEOMETRÍA DE LAS SUPERFICIES EN E 3
en
!1)
111
y que
y
Cll
111.
(2)
A continuación, aplicaremos las ecuaciones ele Codazzi (teorema 2. 7).
De ( 1) se desprende que
en
puesto que k 1
-
111
k2 cj= O en m, y, en consecuencia, según el corolario 2.4,
en m.
(3)
Si aplicamos E 1 a la primera ecuación de Codazzi del teorema 2. 7,
obtendremos
Pero, rn el punto especial m, Ü'nemos que
en consecuf'ncia, deducimos de (2) que
w 12
(R 2 ) =O y que k,-
k"> O;
en
111.
(4)
La m1sma argumentación, a partir de la segunda ecuación de Codazzi,
resulta en
en In.
(5)
Si tomarnos en cuenta ( 4) y ( 3) en la expresión de (3) de la curvatura
gaussiana en m. concluimos que K(m) <O.
f
3.7 TEORJ~MA ( Liebmann). Si Af es superficie compacta en E 3 con
curvatura gaussiana constante K, entonces A1 es una esfera cuyo radio es
1/vK.
(El teorema 3.3 implica que K es positiva.)
Demostración. ='Jo sabemos si Af sea oricntable, de manera que no disponemos de funciones de curvatura principal en la totalidad de Af. De
cualquier mzmcra, la función
está bien definida y es continua en la totalidad de A1, puesto que el cuadrado elimina las ambigüedades de signo. Puesto que M es compacta, la
función l.P - K > O tiene un punto máximo m. Ahora bien, si H 2 - K
es cero en In, resulta ser idénticamente cero; por lo tanto, el corolario 3.4,
aplicado aquí, nos lleva a la conclusión que queríamos.
De manera que debemos hacer ver que lf2 - K no puede ser positiva en
m. Supongamos que lo sea; entonces, m no es punto umbilical y, s1 onen-
ALGUNOS TEOREMAS GLOBALES
301
tamos adecuadamente una vecindad 'JZ de In podemos arregbr las cosas
de manera que k1
k2
O en 'JZ (puesto que K
O) . Entonces, k 1 - k 2
tiene un máximo en m, puesto que ( k 1 - k 2 ) 2 lo tiene. Con1o K = k,k"
es constante, se desprende que k 1 tiene un máximo local en n1 y que k 2
tiene un mínimo local. Pero aquí ya podemos aplicar el lema de IIilbert
para obtener la contradicción
>
>
>
K(m! <O
1
Si omitimos la hipótesis de que la superficie es compacta, el teorema
de Liebmann se vueke falso, pues vilnos en el capítulo V, sección 6, que
hay muchas superficies no esf {:ricas rn E'3 con curvatura constante ( positiva). Tanto el tPorerna 3.5 romo el teon·ma de Liebmann dqwndcn de
la validez clel resultado topológico fundamental (lema 7.3 clel capítulo IV)
de que una función continua en una superficie compacta, de valores reales,
tiene un wáximo. Es necesario estar en posesión de m{:toclos topológicos
más avanzados para investigar plenamente la influencia de la cmY;Jlura
gaussiana en la forma ele las superficiC's E·1 . Por ¡·jcmplo, podríamos preguntarnos qué situación tenemos en las superficies de curvatura const.nlte
cuando debilitamos la conclici{m de que sean cornp:Icl:ls a la de ser cerradas en E".i- He aquí las respuestas:
Una su¡wrficie CT!Tacla .!11 e E", donde !{ es una constante positÍ\'a, es
compacta; en consecuencia, por el teorema de Liebmann, es una esfera.
L' na superficie cerrada Jf e E" en la que J{ = O es un cilindrcJ genera li zaclo (:, rassey) .
No hay superficies cerradas en E'3 en las que [{ sea una constante
negativa (IIilbert!.
El primero ele estos resultados lo demostraremos en el capítulo \'Il.
IIay demostraciones ck los otros dos en Hicks [:J] y \\'illmme [3], en el
orden correspondiente.
EJERCICIOS
1. Si j f es una superficie mínima v llana, clcrnuóstrcse que Af forma
parte de un plano.
2. !"as sujJerficies llanas en E" solamente se pueden flexionar a lo largo
de lineas rectas: si k 1
=
O, y s1 k" no es nunca cero, há:zasc ver que
i' Se define esta condición en el cjcrucw 1 O del capítulo IV, secc1on 7. Dicho
sin mayores exactitudes significa que Af no tiene orillas ni bordes. En las superficies de E". cqui'Ctlc a la propicclacl intrímera ele complPtitucl (definición 4.4 del
capítulo VII).
GEOMETRÍA
302
DE
LAS SUPERFICIES EN
E"
las curvas principales de k 1 son segmentos de recta en E 3 • (lndicaci/m:
Aplíquese el ejercicio 1 de VI. l.)
Este es el punto de partida ele la demostración del ter ,rema de
\fassey.
3. Sea k[ e E 3 una superficie orientablc y compacta en b qm: K > O.
Si A1 tiene curvatura media constante, demuéstrese que Af p una
esfera.
4: Demuéstrese que, en una reg10n en que no haya puntos umbilicales,
hay exactamente dos curvas principales (si hacemos c:tso omiso de
las diferencias de par:trnetrización) que pas:m por cada punto y que
SP cortan ortogonalmente.
(Indicación: Aplíquese el ejercicio 7 ele
IV.8.)
S. Si las curvaturas principales de una superficie J1 e E 3 son constantes,
hágase WT que M es parte de o bien un plano, o bien un:1 esfcr:1, o
bien un cilindro circular. (Indicación: En el caso no trivi:tl en que
k1 =f: k", supóngase que hay un campo adaptado ele sistemas ele referencia en la totalidad de A1 y demuéstrese, por ejemplo, que k1 = 0.)
4
lsometrías e isometrías locales
Ya hemos hablado de las propiedades de una supnficie Af f'n E" susceptiblrs ele ser descubiertas por los habitantes ele A1, ignorantes de la existencia del espacio que quPcb fuera de su superficie. Afirm:li1amos que los
habitantes de .M podrían determinar la distancia dentro de 1\f entre
dos puntos cualesquiera, así como la distancia a lo largo dl· la superficie
de la Tierra es smccptible ele ser medida por nosotros, sus habitantes. La
f( mnulación matemática es la siguiente.
4.1 DEFINicrc'JN. Si p y q mn puntos de A1 e E', consideremos ia colección ele todos los segmentos ele curva lt en Af que Yan ele p a q. La
distancia intrínseca p(p, q) desde p hasta q cn A1 será la mayor de las
cotas inferiores (es decir, d ínfimo) de las longitudes T (o:) de estQS segmentos de curva.
No es necesario que exista una cmTa a cuya longitud sea exactamente
p(p, q) (véase el ejercicio 3). La distancia intrínseca p(p, q) será, en
general, mayor que la distancia euclidiana que se mide en una recta,
d ( p, q), puesto que es necesario que las curvas descansen en J [ (figura 6.9) .
En la superficie de la Tierra (una esfera cuyo radio es aproximadamente
4,000 millas, o sea, 6,400 kilómetros) el interés práctico radica, por supuesto,
303
ISOMETRÍAS E ISOMETRÍAS LOCALES
1
1
1
1
1
1
d(p, q)/
1
1
1
1
1
1
Figura 6.9
pasa
Vimos en el capítulo ll[ que la geometría euclidiana se basa en la idea
de la isometría, que es un mapeo que consen·a la distancia. En las superficies en Al demostraremos que existe la propiedad de conservación ele la.
distancia, y emplearemos su forma infinitesimal (corolario 2.2 ele! capítulo IIl) como definición.
4.2 DEFI;-;;tc:rt,x. Una isometría F: Al~ Af de superficies en E" es un
mapeo uno a uno de "\1 sobre M que consrrva los productos escalares de
vectores tangentes. De manera explícita, si F.,. es el mapa de derivadas de F,
entonces
F,.(v) •F: (w) = v•w
para cualquier par de vectores tangentes v, w a M.
Si F* conserva los productos escalares, cntoncE's también conserva las
longitudes de los vectores tangentes. De esto sr. desprende que una isomctría
es un mapeo regular (capítulo IV, sección 5), pues si F,,(v) = O, e1,1tonces
:1 v
!1
=
11
F,(v)
li
=O,
y, en consecuencia, v = O. Por lo tanto, según los compntarius después ele!
teorema 5.4· del capítulo lV, una isomctrb F: k[~~-[ es, en particular
difeomorfismo, es decir, tiene un mapeo inverso F
4.3
TEOREMA.
Las isometrías conserT<ll1
1
:
M
~
lYl.
la distancia intrínseca:
F: A1 ~M es una isometría d~ superficies en E 3 , entonces
st
304
GEOMETRÍA DE LAS SUPERFICIES
EN E 3
p(p, q) = j.i(F(p), F(p))
para cualesquiera dos puntos p, q ele Al.
(Aquí p y
p son
las funciones ele distancia intrínseca ele Jf y Af.)
Demostración. ObsenTmos e11 primer lugar que las isometrías conservan la rapidez y la longitud de las curvas. La demostración se parece
umcho a la el el caso euclicli;mo: si a es un scgrnento ele curv:1 en Jl.f,
entonces a = F (a) es un segmento ele curva en JI con velocidad a' = F (a').
Puesto que F conserva los productos escalares, tarnbi{~n consciTa bs normas, de manera que afirmamos que
= iiF:(a') = '¡[F(a)'[j =
11 a' [f. En consccuencia,
i!a'll
L(a)
=
1:
11
a'(t) 11 dt
=
J:
11
a'(t) 1! dt
ll
=
L(a).
Ahora bien, si a va desde p hasta q en jf, su imagen ex= F(a) va ele
F(p) a F(q) m if. Tenemos recíprocamente que si (3 es un segmento
de curva de Af que va desde F (p) hasta F (q) en Af, entonces F- 1 ( (3)
va desde p hasta q en Al. De hecho, hemos ('Stableciclo una correspondencia
uno a uno entre la colección de segmentos de curva que nos sirYiÓ para
definir p(p,q) y la que nos sirYió para p(F(p),F(q)). Pero, como ya
hicimos ver antes, las curvas correspondientes tienen !a misma longitud, de
manera que se desprende inmeclia tamen te que p ( p, q) = p(F ( p) , F ( q) ) .
1
Es así corno podemos pensar en una isometría como algo que flexiona
la superficie hasta darle una forma diferente sin alterar la distancia intrínseca entre cualquiera de sus puntos. En consecuencia, los habitantes de la
superficie serían incajJaces de advertir cambio alguno, pues sus medidas
gc"li!i;tricas se crmscrz.·an exactamente iguales.
Si existe una isouwtría de Jf a Jf, entonces se dice que las dos superficies
son isométricas. Por ejemplo, si flexionamos de diversas manC'ras una hoja
de papel, sin arrugarla ni estirarla, todas las superficies que resulten serán
isométricas (figura 6.10).
Para el estudio de las isomctrías. conviene separar la condición geométrica ele conservación de productos escalares de los requisitos ele biyección
(ser uno a uno y sobre).
4.4 DEFINICIÓN. U na isometría local F: A1 --:> N ele superficies es un
mapeo que conserva los productos escalares de \Tetares tangentes ( C'S decir,
Flolzace).
Por lo tanto, una isometría local que es uno a uno y sobre será también isometría.
Si F es una isometría local, la argumentación anterior nos hace ver
que F es mapeo regular. Entonces, para cada punto q de Af, el teore-
ISOMETRÍAS E ISOMETRIAS LOCALES
305
Figura 6.10
1na de la función inversa (el 5.4 del capítulo IV nos dice que hay una
vecindad C2[ de p en 1H, que F transforma difcomórficamente en una vecindad O' de F(p) en N, y que la transformación es sobre. Ahora bien,
Q.[ y
son por sí solas superficies de E", y, por lo tanto, el mapeo F \ Qt:
Q~[ ~
es isometría. En este sentido, una isometría local es, en efecto,
una isometría desde el punto de vista local.
Tenemos un criterio simple de cartas con respecto a las isometrías
locales, para el que sirven las funciones R, F y G que se definieron en la
sección 4 del capítulo V.
4.5
x: D
~
Sea F: 1\1 ~N un mapeo. Con respecto a cada carta
Af, considencmos el m::tpeo compuesto
LEMA
x=
F(x):
D~N.
Entonces, F será isomctrb local si y sólo si tenemos, p:1ra cada c::trta x, que
E=E
F=F
G=G
(Aquí, no es necesario que x sea cuta, pero E, F y G se definen de
la manera habitual con respecto a ella.)
Demostración. Supongamos que el criterio sea válido, sólo en la cantidad suficiente de cartas para cubrir JI. Entor;ccs, por medio de una ele
las equivalencias del ejercicio 1, para demostrar que F,, conserva los productos escalares, no necesitamos más que verificar que
Xu'Xv
= F:(Xn)·F,(xc),
Pero ya vimos. en el capítulo IV, que ele la definición de F:, se desprende irmlf'cliatamentc que F:(xJ = x,. y que F,,(x) = Xv. Por_ lo tant(),
las ccuacio:1es anteriores se siguen de la hipótesis dC' que ¡;; = 1~·, F = F,
G = C. En consecuencia, F cs. isometría local.
GEOMETRÍA DE LAS SUPERFICIES EN E 3
306
Al argumentar de la manera inyersa, obtenemos la demostración del
anunciado recíproco.
1
Este resultado se puede utilizar en ocasiones para construir isometrías
locales. Fn el caso más sencillo, vamos a suponer que Af es imagen de
una sob c:1rta x: D--'? }.f. Entonces, si y: D--'? N es carta en otra superficie. definimos un mapco F: Jf--'? N como
F(x(u,v)) =
y(u,
v)
para (u, v) en D.
Si
E = E, F = F, G = G,
entonces, de acuerdo con el criterio anterior, F es isometría local.
4.6 EJEMPLO
1) La isometría local de un plano a un cilindro. El Plano E" se puede
considerar como superficie, con el campo natural de sistemas de referencia U 1 , U e. Si x: E 2 ---¿ M es parametrización de alguna superficie,
entonces el ejercicio 1 nos enseña que x es isometría local si
Puesto que x:JUl) = Xn, x,,(U2) = Xv y U;. uj = Oij, esto es lo mismo
que requerir que E = 1, F = O, G = l.
Para tener un caso concreto, veamos lo que pasa con la parametrización
X (u, V) =
(r COS e) , r Sen e) , V)
del cilindro Af: x 2 + y" = r 2 • Aquí tenemos E = 1, F = O, G = l. Por lo
tanto, x es isometría local c¡uc enrolla el plano E 2 para formar un cilindro,
de manera que las rectas horizontales \~m por circunferencias cic~ Sé'Cci(~J1
trans\Trsal y las \Trticaks ,·an por rayos del cilindro.
2) I"a isometría lowl de un helicoide sobre un catenoide. Sea H el
ht"licoidc que es im:1gen ele b carta
x(u, v)
=
(u cos v, u sen v, v).
ProYcamos al catenoide e de la pmametrización canónica y:
explicamos en el ejemplo 6.4 del capítulo V. Por lo tanto,
y(u, v) = (g(u), h(u) cos v, h(u) sen v)
g(u) = senh-1u
Sea F: JI----+
e
h(u) =
yl + u
2
•
el mapeo con la propiedad de que
F(x(u, v)) = y(u, v).
E~--'?
C que
307
ISOMETRÍAS E ISO:METRÍAS LOCALES
Para demostrar que F es isometría local, será suficiente c¡ne hagamos la
comprobación ele que
E= 1 =E,
F =O= F,
G = 1
+
u2
=
h 2 = C.
F tramfnrma los reyos (allí '' es const<mte) de ll en meridianos de la
superficie ele re,·olución C, y enrolla las hélices (allí u es constante) de H
en los paralelos ele C. En particular, el eje ccntral ele H (el eje dll las z)
se \·e enrollado alrededor de la circunferencia mínima x = O ele C.
En la figura 6.11, se ve la manera en que se transform:-t un:1 muestra
de H en un trozo de C.
Supongamos que el helicoick JI (o, por lo menos, una región finita
en él) ha sido premado en una lúmina de acero, como se hace con las
defensas de automóviles: éste es el papel que desempefía la carta x.
Entonces, se puede dar a H la forma de un catenoicle sin causar distorsión
alguna en el metal (ejercicio 5 de la sección 5) .
Podemos hacer un experimento parecido si hacemos UE hoyo en una
pelota de ping-pong, que nos representará una esfera en E 3 . Al presionar
suavemente, deformaremos la pelota hasta darle diversas formas no re-
z
e
Figura 6.11
don:bs, todas las caales s~'rÚn isométricas. Sin cmlJargo, en superficies
arbitrarias Jf v A1 en E\ no es, en gcner::tl, posible flexionar "H (de manera que tome ~s formas de toda e: na familia de superficies isométricas)
para producir Jf.
3
308
GEOMETRÍA DE LAS SUPERFICIES EN E'
Hay tipos especiales de rnapeos además de las isometrías (locales) que
tienen interés en las geometría.
4.7 DEFINICIÓN. Un mapeo de superficies F: 1\f ~N es conforme
cuando existe una función A.
O en l•,f y de valores reales, tal que
>
IJ K(v¡,) 11 = 'A(p) il vpll
para todos los vectores tnngentes a AI. La función /.. se llama
esc~la
de F.
Adviértase que si F es un rnapeo conforme en el que ,\ tiene el valor
constante 1, F es isometría local. Por tanto. un mnpeo conforme es
una isometría generalizada en la que no es necesario que se consetYe
la longitud ele los vectores tangentes, sino que, en cada punto p de ;U, los
vectores tangentes cn p ven aumentarse o disminuirse sus longitudes en
el mismo factor.
Los criterios del lema 4.5 y del ejercicio 1 se adaptan con facilidad de
las isometrías a los mapcos conformes si se hace intenTtlir la escala (o su
cuadrado). Por ejemplo, en el lema 4.5, hay que substituir E = E por
E>.. 2 ( x) = L y lo mismo en las otras dos ecuaciones.
En el ejercicio 8 se examina una propiedad esencial de los mapeos
conformes.
EJERCICIOS
~N es un mapeo, hágase ver que las condiciones siguientes
en su mapa de derivadas y en un punto p son equivalencias lógicas:
n) F,, conserva los productos interiores.
b) F:. conserva las longitudes de los \TctmTs tangentes, es decir,
1. Si F: 1\I
e)
11 F*(v) 11 = 11 v 11 para todo ven p ..
F:. conserva los sistemas ele rcfercncia: sr e,, e 2 c·s un sistema de
referencia t::mgente en p, entonces
es sistema ele refert>ncia t;mgentc en F(p).
d) En algún par ele \Tctores tangentes y linealnwnte independientes
v y w en p, se ,·erifica que
11
F,(v)
[1 =
[[V
11,
F,.(w)
11
=
11
w [[,
y
F(v) •F(w)
=
v•w
[Indicacú!n: E' ,;u[icicntc clenJc"trar, por cjcrnplo, que la)~ (e)~ (d)
~ ( b) -7 (e) .J
Estos resultados son gr'neralidadc:; en el úlgcbra lineal: en este contexto, constituyen criterios úüles para determinar si F es isometría local.
309
ISOMETRÍA3 E ISOMETRÍAS LOCALES
2. Hágase ver que cada una de las condiciones siguientes es nccesana
y suficiente para que F: J\1 ->N sea isometría local.
a) F conserva las rapideces ele las cun·as: :1 F (a)' \\ = 1\ o/ 1! p;-1.r:1
todas las curv:-ts a en Af.
b) F conserva bs longitudes de las CU!Yas: r (F ((Y) ) = J, (a) para todos los segmentos de curva (t en ,H.
3. Sea ,H el plano xy en E 3 sin el ol'igen. Verifíque'e que b distancia
intrínseca desde ( -1, O, O) hasta (LO, O) en Jf es 2, pero que no
existe ningún segmento de CUlTa en J/ que una ambos puntos y
tenga longitud 2. (Indicaciún: Ejercicio 11 de 11.2.)
4. Formúlese con precisión y demuéstrese el enunciado siguiente: las
isometrías locales pueden disminuir, aunque no incrementar la distancia intrínseca.
5. Sean a,/3: I -?E' curvas de rapidez unitaria con la m1sma función
de curvatura K > O, y supóngase que la parametrización reglada
x(u, v)
=
a(u)
+
vT(u)
de la superficie tangente de a es en realidad una carta. Encuéntrese
una isometría local que vaya de la superficie tangente de a a:
a) La superficie tangente de {3.
b) U na región F ele! plano.
(Jndicaciún: Ejercicio 9 de III.5.)
6. Hágase ver que el ejercicio anterior se aplica a la superficie tangente
de una hélice y encuéntrese la región imagen D en el plano.
7. J\1odifíquense las condiciones del ejercicio ] , de manera que constituyan criterios para que F sea mapeo confm me. lkmuéstrcse a
continuación que una carta x: D ~ Af es mapeo con forme si y sólo
si E=
y F =O.
e
8. Hágase ver que un mapeo conforme F: .\1 ~S conserua los án;:11los
en este sentido: si {} es un ángulo (O S:{}~ ,e) que forman v y w en
p, eJ:tonces {} es el ángulo que forman F,, (v) y F, (w) en F (.p).
9. Si F: lvf ~M es una isometría, demuéstrese que el mapeo inYerso
F- 1 : M~ i\lf es también una isometría. Si F: A1 ~N y e: N-> P
son isor!lctrías (locales), demuéstrese c¡ue el mapco compuesto eF:
Jf ~ r es isometría (local).
x
1 O. Sea x una lXlrametrización ele la totalidad de 1\1 y sea
una pararnetrización en N. Si F: A1 ~ 1\7 es un mapeo con b propiedad de que
F(x(u,z·)) = x(f(u),gCz;)), entonces
310
GCO!IIETRÍA DE LAS Sl:PERFICIES EN E'l
a) Descríbase el decto que tiene F en las curvas parúmetro de x.
b) Hágase nT que F es isometría local si Y sélo si
E= E(f, g)
df)"
(d;
df dg
F=F(f,g) ---du dv
e= e~ ~ u, g)
(da)"
d;
(En el caso general, f y g son funciones de tanto u cmuQ z•, y este
criterio se vuelve más complicado.)
e) Encuéntrense condiciones análogas para que F sea mapeo confonne.
11 . Sea Af una superficie de revolución, y sea F: JI -'> }¡f una isometría
local del helicoide que (como teníamos en el ejemplo 4.6) transforme
los rayos en meridianos y bs hélices en paralelos. Húgase \Tr que Af
ha de ser un catenoide. (Indicación: Aplíquese el ejercicio 10.)
12. Sea Af la imagen de una carta
X
en la que E= 1, F
=o
y
e
es
función sólo de u (e" o= O). Si la derivada d ( \Í G) / du está acotada,
hágase ver que hay una isometría local que va de 1\I a una superficie
de revolución.
En consecuencia, cualquier región de lvf que sea suficientemente
pequeña es isométrica a una región de una superficie de revolución.
13. Sea x la carta geográfica en la esfera :S de radio r (ejemplo 2.2 del
capítulo IV). Estírese x en la dirección ele norte a sur para producir
un mapeo conforme. De manera mús explícita, sea
y(u, v) =
x(u,g(v))
donde g(O) = O.
y determínese g ele manera que y sea conforme. Encuóltrese la escala
de y y el dominio D tal que y(D) omita solamente una semicircunferencia de :S. (La carta de I\Iercator ele la Tierra se deriva de y: su
inverso es la proyección de j f e reatar.)
14. Húgasc ver que la proyección estereográfica P:
del capítulo IV) es conforme, con la escala
-
,\ ( p) - 1
:So--'?
E" (ejemplo 5.2
[[P(p)
+ --4 ~~ -- [iZ- .
15. Sea M una superficie de revolución cuya curva perfil no esté cerrada;
en comecuencia, tendrú una parametrización uno a uno. Encuéntrese un mapco conforme F: ~1--'? E" tal que los meridianos se transformen en rectas que pasan por el origen y que los paralelos se
transformen en circunferencias con centro en el origen.
LA GEOMETRÍA INTRÍNSECA DE SUPERFICIES DE E 3
S
311
La geometría intrínseca de superficies de E 3
En el capítulo III definirnos la g~ometría euclidiana como compu~st:o..
de los conc~ptos c¡ue s~ consnvan bajo las isometrías euclidianas. Aplicaremos la misma definirión a las superficies: la gr:ometria intrínsaa ele
Jf C E-' consiste en los conceptos -que sr~ llaman inz.·ariantes isométricos- que s~ conserv~m bajo todas las isonwtrías F: JI----:> Af. Pm ejemplo,
el teorema 4 nos hace ver que la distancia intrínseca es un in\·ariante
isométrico. Aquí podemos ya enunciar con más precisión la pregunta de
Causs (de la cual hicimos mención en el principio de este capítulo) : e' Qué
propiedades de una superficie Jf en E 3 pertenecen a esta geometría intrínseca? La definición ele i;ocmetría (definición 4.2) nos sugiere que las
i1warianks isométricas h:m de depender solamente del producto escalar
que se aplica a los \·cctores tangentes a Al. Pero el operador de forma se
deriva de un c:1mpo vectorial normal, y los ejemplos de la sección 4 nos
dan a entender que la:; superficies isométricas de E'1 pueden ser de formas
muy din•rsas. En realidad, esos ejemplos constituyen una demostración
formal de que los operadores de forma, las direcciones principales, las
curvaturas principales y la curvatura media no pertenecen definitivamente
a la geometría intrír:,cca ck jf e E".
Con el fin ele construir una teoría sistemática de b geometría intrínseca, lwmos de volwr a la sección 1 y ver en qué medida el trabajo que se
hizo allí es intrínseco a Jf. Si aplicamos sólo a vcctcres tangentes a M el
producto escabr, todavía podemos definir un campo tangente ele sistcrn:1s
de rcferenci<1 R,, Ec en Af. Por consiguiente, a partir de un campo adaptado de sistemas de referencia, podemos separar para nuestro uso los dos
campos tangentes E,, Re y, en consecuencia, también sus 1-formas duales
() 1 , () 2 • Resulta un poco sorprendente ver que con esto se determina por
completo la forma ele conexión '"'"'
es h
5.1 LEMA. La forma de conexión
estructurales:
que satisface las prin1e:ras ecuaciones
única
1-fonr~~l
Demostración. Apliquemos estas ecuaciones a los campos vectoriales
tangentes E,, R 2 • Puesto que ()i (Rj) = Oij, la definición de producto tilde
(definición 4.3 del capítulo IV) nos dice que
W¡z (El)
d81(E1, Ez).
Wlz(Ec)
- '''"' (Ee)
=
dBz (E,, Ez).
Por lo tanto, según el lema 2.1, tenemos que
de manera única por
e,,
Bz.
w 12
=-"'"'ce determina
1
312
GEOMETRÍA DE LAS SUPERFICIES EN E 3
5.2 CoMENTARIO. De hecho, esta demostración nos enseña a construir "''" = - ''-':!t sin que intervengan las derivadas covariantcs euclidianas
(como teníamos en la sección 1). Dados E,, E 2 , y, por lo tanto e,, B2 ,
tomemos las ecm1cioncs ele la demostración anterior como la definición
ele ,., 1 , en E, v E 2 • Entonces, la condición habitual de linealidad
hace de "''" una 1-forma en Af, y es fácil verificar (al invertir la argumentación anterior) que "' 12 = -"'" 1 cumple con las primeras ecuaciones
estructurales.
Si F: JI--:> Ji es una isomctrb, entonces podremos transferir un c::mlpo tangenlr ele sistemas ck rderem·ia ¡;; 1 , E 2 en Af a un c::1mpo tangente
de sistemas ele referencia H,, E" en Jf: para cada punto 'I en M hay un
punto único p en A1 tal que F(p) = q. ,\ continuación, definirnos
R, (q)
=
F, (E!(p))
Edq) = F,(E.(p) ).
(Fig. 6.12).
Figura 6.12
En Lt práctica, abreviaremos estas fórmulas, un poco despreocupadanwn le, corno
Gracias a que F, conserva los productos escalares, E,, E 2 es campo de
sistemas ele rcíercncia en j}, pues
LA GEOMETRÍA INTRÍNSECA DE SUPERFICIES DE
E3
313
5.3 LEMA. Sea F: Af ~ 1W una isometría, y sea E 1 , E 2 un cmupo tangente de sistemas ele refert>ncia en A1. Si E1. Ee es el campo transf e rielo de
sistemas de referencia en M, entonces
1) O,= F"(OI), 02 = F*(fiz)
2) (¡)" = F''(wd.
Demostración. 1) Será suficiente que demostremos que O¡ y F' \O i) tienen t>l mismo valor en H 1 y en H 2 • Pero, para 1 < i, j < 2, tenemos
(i,
en M. Si aplicarnos F*, entonces, de acuerdo con los resultados del capítulo IV, sección 5,
obtcnernos
2) Consideremos la ecuación t>structural
ifi 1
= ÚJ1z 1\
En consecuencia, por ( 1), vemos que
La otra ecuación estructural
nos da una ecuación correspondiente, de manera que
d01
=
F*(-wu) " Bz
dOz
=
F'(weJ) 1\ 01.
Pt>ro aquí (2) se reduce a una consecuencia inmediata de la propiedad de
unicidad (lema 5.1), puesto que
1
A partir de este lema, que es bastante rutinario, deducimos con facilidad una demostración del célebre theorema egregium de Gauss.
5.4 TEOREMA. La curvatura gaussiana es un invariante isométrico;
esto significa que sr F: A1 ~M es una isometría, entonces
K(p)
=
K(F(p))
para todo punto p t'n "H.
Demostración. En un punto arbitrario p de Af, tomamos un campo
tangente de sistemas ele referencia F1, E 2 en alguna \·ecinclad ele p, y lo
transferimos, mediante F, a H1 , Ez en A-:f. Por el lema anterior, F*(w 12 ) =
o1 12 . De acuerdo con el corolario 2.3, tenemos
14
GEOMETRÍA DE LAS SUPERFICIES EN E 3
~pliquemos
F* a esta ecuación. Por los resultados del capítulo IV, scción 5, obtenemos
londe F*(K) es simplemente la función compuesta j{ (F). En consecwen:ia, por el lema anterior,
\1 comparar esto con r[,,,," = - !{() L A ()" tenemos K = K (F) ; por con;iguiente, en particular, K(p) = K(F(p) ).
1
El teorema de Gauss es uno de los gramks descubrimientos de las
matemáticas del siglo xrx, y \Trc~mos en el capítulo siguiente que tiene
implicaciones ele graneles alcances. El paso esencial de la demostración es
la segunda ecuación estructural
Una vez que se ha demostrado el lema 5.1, todos los ingredientes de esta
ecuación, si cc;ceptuamos K, se deducen, según sabemos, de 1H nada más;
por lo tanto, lo mismo debe pasar con K. Esto significa que los habitantes
de M C E' pueden determinar la curvatura gaussiana de su superficie
aunque no puedan, en general, encontrar S ni tengan idea de la forma
de ltf en E 3 •
La maquinaria de las formas diferenciales da a este razonamiento
seguridad indudable al proveernos de la demostración formal de la invariancia isom6trica en el teorema 5.4. Esta notable situación tal \TZ tenga
su mejor ejemplo en la fórmula K = k 1 ke: no es necesario que una isomctría conserve ni las curvaturas principales ni su suma, pero ha de
consemar su producto. Por lo tanto, las formas que las superficies isométricas pueden tener -aunque tal vez sean muy distintas- no carecen en
absoluto ele relación.
Una isometría local es, como ya hemos visto, una isomctría definida
en todas las vecindades suficientemente pequeñas. Por lo tanto, del teorema 5.4 se desprende que las isometrías locales conservan la curvatura
gaussiana. Por ejemplo, en el ejemplo 4.6, tanto el plano como el cilindro
tienen K = O. (Por esta razón, no hemos dudado en llamar "llano" al cilindro, r¡ur:: es curv~o. Intrínsecamente, es tan llano como un plano.) En
la segunda parte del ejemplo 4.6, en puntos correspondientes
x(u, v)
y ·
F(x(u, v)) = y(u, v),
LA GEO~IETRÍA INTRÍNSECA DE SUPERFICIES DE E 3
315
el helicoide y el catenoide tienen exactamente la misma cun·atma g:m<sJ::ma: -1 / ( 1 + u")" ( véanse ]m; ejemplos 4.3 y 6.·1 del capítulo Y).
El thcorcma egrcgium de c;au•,s se puede w:ar ob\·iamcnte p:na \Tl"
que dos superficies dadas no son isométri,·as. Por ejemplo, no puede haber
ninguna ismnctría que \·ay:: ele la c::fcra ::S (ni inc:luc:o un:t par~e ::1inima
dr: c:Jla) sobre una F:trte d('] plano, puesto que SUS C\ltY<tturaS gaussi:mas
son diferentes. E,:tc es el dilema cld cartó¡.;rafo: la gconwtría inhínc:cc:a
de la superficie ele b Til'rra queda mal represcniach por cualquier !>lapa
plano.
La sección siguiente es para aprender a lwcn cálculos: l'n la .secci(cn 7
v,_Tcmos m{ls in\·arianLes isométrico:;.
EJERCICIOS
l. Las geodésicas pertenecen a la geometría intrínseca: si a es geod(;ica
en A1 y si F: A1-:> N es una isometría (local), entonces F (a) es geodésica en N. (Indicación: Véase el ejercicio 1 de VI.l.)
2. Aplíquese el resultado del ejercicio 1 para deducir las gecc!é:,icas de
cilindro circular (ejemplo 5.8 del capítulo V\. Ccneralíccse c:;ta cuestión a un cilindro arbitrario.
3. En una superficie (conexa), los Yalorc:-; de su u'!,·:¡ t ura gaus:.J:ma
llenan un intcryalo. Si l'xiste una isometría local de Jf sub re X (en
particular, si .~1 y N son isométricas), húgase \Tr que 1\1 y S ticn!'n
el mismo intcn·cdo de curYatura. Con un ej(']nplo, demuéstrese h
falsedad del enunciado recíproco.
4. Demuéstrese que, de las superficies siguientes, no hay dos que sc;an
isométricas: csfcr:1, toro, helicoide, cilindro circular, silla de montar.
5. }J fle.Yiunamiento del helicoide j;ara producir un catenoide ( ·1:.6). Para
cada número t del intcryalo O:_::: t < ;r/2, sea x 1 : .Ec-:> E" el mapco
con la propiedad de que
Xt(u,v)
=
cos
(Se, Ss, v) +sen t (- Cs, Ce, u),
donde C = cosh u, S = senh u, e = cos v y s = sen u .
. \quí, X 11 es una carta que cubre al helicoide, y x" ., es una paramctrización del catenoide; éstas son pequeñas Yariacio·J;c:; ele nuestras
parametrizacioncs habituales, y aquí el catcnoidc tiene al eje de las z
como eje de rotación. Si suponemos que t es el tiempo, cntoncc:;
Xt para O :S t :S" /2, nos .describe el fleYicnamiento del helicoide 1\10
316
GE0;\1ETRÍA DE LAS SUPERFICIES EN E
3
en el espéccio, que lo transforma en el catenoide A1 .,, " por medio de
toda una familia de superficies isométricas intermedias Jf 1 = x 1 (E").
Demuéstrese que
a) M 1 es una superficie. (Solamente hay que demostrar que x 1 es
regular.)
b) M 1 es isométrica al helicoide JI 0 si t < "j2. (Hágase Yer que
F 1 : A10 --:>lv1 1 es una isometría, donde
Ft(x0 (u,v)) = x 1 (u,v).
También wrifíqucse que para t = "/2, F 7":," es isometría local.)
e) Cada A1 1 es sujJerf:"cie mínima. (Calcúlese Xuu + X 111 • = 0.)
d) Las normales unitarias son paralelas en órbitas: a lo largo de la
curva t--:>x 1 (u,1.') por la cual el punto x 0(u,v) de lv1 0 se mueve
hacia M., 2 las normzdcs unitarias U 1 de las superficies sucesivas
son paralelas.
e 1 J,a curvatura gaussiana es constante en las órbitas. (Encuéntrese
K 1 (x 1 (u, v)), donde K 1 es la curvatura gaussiana de lv1 1 .)
En la obra de Struik [6] hay una espectacubr serie ele ilustraciones
de este flexionamiento.
6. IIágast~ ver que toda isometría local del helicoide JI al catenoide C ha
de transformar rl eje de H en la circunferencia mínima de C. y los
rayos de H en los meridianos de C, como se tiene en el ejemplo 4.6
(Compárese con el ejercicio 11 de VI.4.)
6
Coordenadas ortogonales
Ya hemos visto que la geometría intrínseca de una superficie Af C E·"
se puede expresar en términos de las formas duales 0 1 , 02 , y de la forma
de conexión w 12 , que se deriva de un campo tangente de sistemas de rderenCJa E,, F 2 • Estas formas cumplen convenientemente las primeras ecuaciones estructurales:
la segunda ecuación estructural:
En esta sección, desarrollaremos un método práctico de calcubr estas
f armas y, en consecucnCJa, una nucya manera de determinar la curvatura
gaussiz:na de A1.
317
COORDENADAS ORTOGONALES
El punto de partida es una carta ortogonal de coordenadas x: D-'> ;u,
con la peculiaridad de que, en ella, F = Xn • Xr = O. Puesto que Xn y x, 'on
ortogonales, ]a división entre SUS longitudes
producirá sistemas de referencia.
11 Xu 11
= {E Y
11 Xv 11
=
-1G
6.1 DFFINICIÓN. El camjJo asociado de sistemas de referencia E 1 , E"
ele una carta ortogonal x: D-'> Jf consiste en ]o:; campos y~torialcs
unitarios E 1 y E~, cuyos valores en cada punto x(u, v) de x(D) son
Xu(u, v) 1YE(u, v)
y
xv(u, v)
1YG(u, v).
En el ejercicio 9 de la sección 4 del capítulo I\', asociábamos con cada
carta x las funciones coordenadas ¡¿ y
que asignan a cada punto
x (u, v) los números respectivos u y z•. Por ejemplo, en la carta geográfica
x del ejemplo 2.2 del capítulo IV, las funciones coordenadas son las funciones de longitud y de latitud en la esfera ¿;_ En el caso extremo en que x
es el mapco identidad de E", las funciones coordenadas naturales (u, v)
-'>u, (u, v) -'> v en E~.
En una carta ortogonal x con el campo asociado ele sistemas de referencia E1, E 2 , expresaremos e1 , e2 y w12 en términos de las funciones
coordenadas ii, fJ. Puesto que x permanece fija a lo largo de la explicación,
correremos el riesgo de omitir el mapeo inncrso x- 1 de nuestra notación.
Convenido esto, las funciones coordrnadas u = u ( x- 1 ) y v = v ( x-1 ) se
expresarán simplemente como u y v, y haremos lo mismo con Xu y Xr, que
aquí se convierten en campos vectoriales en la misma A1. Por lo tanto, el
campo asociado de sistemas de referencia x tiene la expresión concrsa
v,
( 1)
.\quí las formas duales e1 y 02 se caracterizan por Oi ( Ei) =) 8 ij, y en el
ejercicio al que nos referirnos antes se ve que
du(xu)
=
1
du(xv) =O
dv(xu) =O
dv(xv)
=
1
Es así como deducimos a partir de ( 1) que
ez = YG dv.
(2)
Por medio de las ecuaciones estructurales, encontraremos fórmulas análogas de w12 y K. Recordemos que, en una funcifm f, df =fu du + fv dv,
donde los subíndices nos indican bs dt:ri\·ad:~s parciales. En consecuencia,
obtenemos, a partir ele ( 2) , .
318
GEOMETRÍA DE LAS SUPERFICIES EN E 3
--= ~;) v
dB, = d (y E)
A
du = (y E) v dv du =
dfi, = d ( v G)
A
rlzj = ( v G) u du dn = - ( yC)" dv
yE
du 1\ Be
A
e,
donde nos hemos valido de la regla ele altcrnaci{m ele los proclur_tos exteriores, y, también, substituimos dz· = O) y G y du = 0 1 / y E. c¡ue tornamos
de (2). La comparación ron las primeras ccuarimw:; cstn¡clur:dl's d01 =
,.,1:: 1\ Be y dBe = -wlz 1\ 8 1 nos enseña c¡ue
w,z =
(y E) v du
-
yG
+ ( VG)"
du
yE
La estructura lógica de esto es sencilla: por los cálculos que acabamos de
hacer, esta forma satisface las primeras ecuariones estructurales; en consecuencia, por la unicidad (lema 5.1), tiene que ser w 1 e.
6.2 EJEMPLO Las coordenadas geográficas en la esfera. En la carta
geográfica x de la esfera :S (ejemplo 2.2 del capítulo IV), hemos calculado
E = r 2 cos 2 v, F = O, G = r 2 • Por lo tanto, según la fórmula (2) de antes,
(jl
=
r
COS V
Ahora bien, ( v7l) V = - r sen
1!
w12
y
du
82 = r dv.
(y G)" =
o; en consccuencw, por (3)'
= sen v du.
El rampo asociado de sistemas de referencia de esta carta es el 1111s111o
que obtm·imos C'n el C'jemplo 1.6 del campo esférico de sistemas de referencia
en E". Con el calJlbio notacional u~{}, v -> rp, las formas anteriores son
(necesariamente) también las mismas. Pero aquí tenemos una manera
sencilla ele calcularlas directamente en términos de la superficie, sin recurrir
a la geometría de E 3 .
Por último, vamos a deducir una nueva expresión de la curvatura gaussiana. En este contexto, la diferenciación exterior de w 12 como se da en (3)
resulta en
dco 12
=
-((yE) 1.jyG)vdudu
+
((yG)u/YF)ududu.
A partir de ( 2), tenemos
en consccuenoa,
1
- dz) du = du dv = -- - 81
yEG
1\
82.
319
COORDENADAS ORTOGONALES
Por tanto, la fórmula anterior se convierte en
1\ continuación, compararemos esto con la segunda ecuanon estructural,
6.3 LBrA. Si x: D--.¿ A1 es una carta ortogonal, entonces la curvatura
gaussizma J( está dada en términos de x por
En contraste con la fórmula de K en d corolario 4.1 del capítulo V,
las funciones l, m y n (que describen al operador de forma) ya no aparecen
aquí. En efecto, como expresamos K solamente en términos ele R, F y G,
tenernos, al aplicar el lema 4.5, otra demostración de la invariancia isomC:trica ele la curYatura gaussiana.
En las aplicacior;es, es, en general, más fácil repetir la deducción del
lema 6.3, en cada caso, en lugar de buscar la fórmula para substituir en
ella los valores correspondientes. Por ejemplo, consideremos la parametrización polar x (u, x) = (u cos v, u sen v) del plano euclidiano E~. Aquí,
E= 1, F = O (luego x es ortogonal) y G = u 2 • Por tanto, de acuerdo
con (2). 01 = du y 0 2 = u dv. Puesto que
y
encontramos o) 12 = du. Pero, entonces, do) 12 = O, lo que nos hace ver nuevamente que E~ es llano.
6.4 E}El\IPJ.O. El campo natural de sistemas de referencia de una superficie de re\·olución. Con respecto a una parametrización canónica
X (U, V) = (g (U) , h (U) COS
V,
h (U) sen V)
de una superficie de rPvolución, el campo asociado de sistemas ·de refcrcncia tiene a E, en la dirección de los meridi::mos, y a Ec en la dirección
ele los paralelos (figura 6.13). Puesto que X es ortogonal, con E = 1'
= h",
obtenemos 0 1 = du y 02 = h d11. Aquí, h r·s función sólo ele u, de manera
que h,. = O, y hu es la ckri\·:tcla ordinaria h'. :\ parí.i:· de (3)
o por
medio de cálculos directos-- "' 1 " = h' de•, ele manera que
e
320
GEOMETRÍA DE LAS SUPERFICIES EN E'3
Figura 6.13
Y llegamos a la conclusión de que la curvatura gaussiana es K= - h"/ h.
lo que concuerda con los resultados del lema 6.3 del capítulo V.
EJERCICIOS
1. Calcúlense las formas duales, las formas de conexión y la curvatura
gaussiana del campo asociado de sistemas de referencia de las cartas
ortogonaks siguientes:
a) x(u,v)
(ucosv,usenv,bv),helicoide
b) x (u, u)
(u cos v, u sen v, u 2 /2), paraboloide de re\·olución.
e) x(u, v)
(u cos v, u sen v, a,), cono.
2. Sea la carta x: D ~ AJ un mapeo conforme. (Se dice que el sistema
asociado de coordenadas es isotérmico.) Demuéstrese que:
a) K = - ~ (log E) f2E, donde ~ es el laplaciano: .~f = ~~u" + /vv·
b) La cmYatura media H es cero si y sólo si x,, + Xvv = O. Indicación: Aplíquese el ejercicio 7 de VI.4.)
1, hágase \·er que J{ = -{},v/sen{},
donde {} es el ángulo de coordenadas. (Indicación: En el campo de
sistemas de referencia para el cual L\ = xu, como se ve en la figura 6.14, muéstrese que el = du + cos {} dv, (i2 = sen{} dv.)
3. En una carta en la que E=
e=
Figura 6.14
321
INTEGRACIÓN Y ORIENTACIÓN
4. Si x es carta principal (ejercicio 9 de V .4), demuéstrese que
a) w13 =
l
- du
vE
b) lv
=
HEv
n _dv.
yG
S. Refínese la argumentación del texto para exhibir la validez litera./ de las
ecuaciones ( 2) y ( 3) cuando f} 1 , f} 2 y UJ 12 se reemplazan por sus expreSIOnes en coordenadas
7
Integración y orientación
El objetivo principal de esta sección consiste en definir la integral de una
2-forrna sobre una superficie compacta y orientada. En esta idea, no interviene la geometría en nada: corresponde al cálculo integral de superficies
(capítulo IV, sección 6). Sin embargo, para motivar la definición, consideraremos algunos problemas geométricos relacionados con esta cuestión.
Tal vez la aplicación mis sencilla de la integración doble a la geometría
sea la determinación del área de una superficie. Para descubrir una definición adecuada de área, empezaremos por una carta x: D---¿ Jvi para preguntarnos lo que el área de su imagen x(D) debe ser. Sea t:::.R un pequeño
rectángulo de coordcnmlas en D con lados !:::.u y !:::.v. Ahora bien, x distorsiona !:::.R en una pequeña región curvada x(!:::.R) en Ai, cuyos límites los
trazan obviamente cuatro segmentos de cmYas parámetro, como se ve
en la figura 6.15.
V
x(ll.R) -~ ·
Figura 6.15
Ya hemos visto que el segmento que va de x(u, v) a x(u +!:::.u, v)
se ve linealmente aproximado por !:::.u Xu (que se evalúa en (u, v), y el que
va de x(u, v) a x(u, v + !:::.v) por !;:,.¡¡ x'" Por lo tanto, la región x(t:::.R)
queda aproximada por el paralelogramo en Tx (u, v) (NI) en el que estos
vectores son sus lados. Gracias al capítulo II, sección 1, sabemos que el
área de este paralelogramo es
GEOMETRÍA DE LAS SUPERFICIES EN
322
11 ÁUXu
X
ÁVXv 11
=
11 Xu
X
Xv !1
D.ut.v
E3
= VEG-
P D.ut>v
Llegamos a la conclusión de que el área de x ( t.R) debe ser, aproximadamente, yECF~¡i2 veces el área t.ut>v ele b.R. En cada punto (u, 11) la
vKc -
expresión
it2, con la cual estamos familiarizados, nos da la tasa
con que x expansiona el área en (u, v). Por lo tanto, resulta natural
definir el área de toda la región x (D) como
Estas integrales bien pueden ser impropias, por supuesto; nos libraremos
de esta dificultad por medio de una modificación dd concepto de carta.
7.1 DEFINICIÓN. El interior R 0 de un rectángulo R: a< u < b,
e< v < d es el conjunto abierto a< u< b, e < v < d. Un 2-segmento
x: R -----;. M es cuasicarta cuando el mapeo restringido x: R 0 --e> M es carta
centro de M.
El comentario que hicimos después del lema 7.3 del capítulo IV
nos hace ver que el área de x (R) es finita, puesto que implica que
-..ffic;---::: pz >O está acotada en R.
Un 2-segmento cuasicarta x: R-----;. M no debe ser necesariamente uno
a uno en la frontera de R, de manera que tal vez la imagen no sea muy
rectangular. De hecho, veremos a continuación que el área de una superficie compacta y entera se suele calcular, cuando ello es posible, al cubrirla con un solo 2-segmento.
7.2 EJEMPLO. Areas de sujJerficies
1) La esfera :S de radio r. Si la fórmula con que se define la carta
geográfica la aplicamos al rectángulo R: -r. ~ u ~ r., -r. /2 ~ v ~ rr /2,
obtenemos un 2-segmento con el cual cubrimos completamente la esfera.
Ahora bien,
E = r 2 cos 2 v,
F=O
y
e=
r2 ,
ele manera que
V EG----::_: F 2
= r2
cos v,
y el área de la esfera es
A (:S)
=
r, r::2
2
r cos
V
du dv
= 4.rr
2.
2) Toro T de radios R > r >O. A partir del ejemplo 2.6 del capítulo IV, podemos deducir un 2-segmento cuasicarta que cubra al toro. Aquí,
tenemos
323
INTEGRACIÓN Y ORIENTACIÓN
V EG-
F"
= r(R +reos u),
de manera que el área es
A(T) =
f'. r,.
r(R +reos u) du dv = 4;-c 2 Rr
3. Trompeta (ejemplo 6.6 del capítulo VI. Toda :;upcrficie ,¡:le re\ olución lvf tiene una parametrización canónica en la que E = 1, F = O,
= h". En un rectángulo R: a< 1l :::-: b, o < V :::; 2;-c, X es un 2-segrncnto
cuasicarta cuya imagen viene a ser la región de lvf entre los paralelos
u = a y u = b (figura 6.16) . Por lo tanto, el área de esta región es
e
Aao =
I
.
_
I
f¡
a
h du dv = 271"
o
lb
,
h du.
n
Con respecto a la trompeta, en el capítulo V vimos que h (u)
en consecuencia,
Aab = 2r.c
¡-a
Jb
e-u/e
ce-uf e;
du
Figura 6.16
Para encontrar el área de toda la trompeta -que es una superficie no
compacta- vamos a expandir esta región, de manera que a~ O y b ~ oo.
Por lo tanto (v6asc el comentario 7.6), la trompeta tiene el área finita
324
GEOMETRÍA DE LAS SUPERFICIES EN E'
Cuando intentemos definir el área de una región complicada, no buscaremos un solo 2-segmento cuasicarta que se le ajuste. En lugar de ello,
seguiremos el procedimiento habitual del cálculo elemental y dividiremos
la región en trozos sencillos, con el fin de sumar sus úreas, una vez que las
hayamos encontrado.
7.3 DEFINICIÓN. Un enlosado de una reg10n LJl de Al consta de un
número finito de 2-segrnentos cuasicartas x,, · · ·, x 1,, cuyas imágenes llenan
5Y de manera que cada punto de fP pertenece a no más de uno de los conjuntos X; (R; 0 ).
Con brevedad, decimos que las imágenes ele las
a
X¡
cubren exactamentE'
fP y se traslapan solamente en sus fronteras (figura 6.17).
N o todas las regiones son susceptibles de descomponerse en enlosados;
puesto que los enlosados son finitos, la condición de ser compacta la superficie a la que se aplica es, desde luego, necesarizt (definición 7.2 del capítulo IV). Tztmbién podemos suponer sin riesgos que una región compacta es
Figura 6.17
cnlosable si su frontera consta de un número finito de segmentos ele curvas
regulares. En particular, una superficie comjmcta y entera será siempre
enlosable. t El área de una región enlosztblc ~jl se define como la sumzt
de las úreas de xdR 1 ) , ···,xk(R 1,) ele un enlosado ele 51). (Explicaremos
las cuestiones ele consistencia que lwy aquí después de la definición anúlogzt 7.'j).
La exposición anterior nos enseñzt que el cúlculo del úrea no pide la
intervención de las formzts diferenciales, sino la de la integración de
2-formas (definición 6.3 del capítulo IV) : con ello obtenemos el área, y
muchas cosas más. l'\ucstra primera pregunta es: c·cuál de las 2-formas
debemos integrar sobre un 2-segmento cuasicarta x jJara obtener el área
de su imagen? Por definición,
t \'éanse los comentarios y la referencia después del teorema 8.5 del capítulo VII.
325
INTEGRACIÓN Y ORIENTACIÓN
Por lo tanto, buscaremos una 2-forma cuyo valor en
En general, una 2-forma
¡.t (V,
¡.t
W) = +
X
11 ,
Xv
sea
tal que
11
V X W 11
para todo v, w
se llama forma de área. Una forma así asigna a todo par de vectores tangentes v, w o bien más, o bien menos el área del paralelogramo cuyos
lados son v y w.
7.4 LEMA. Una superficie .U tiene una forma de área si y sólo si es
orientable. En una superficie (conexa) AJ, hay exactamente dos formas
de área, que son inversas aditivas una ele la otra. (Las denotaremos por
dM y -dM.)
Demostración. Si v y w son linealmente independientes, entonces
X w 11 > O; por lo tanto, las formas de área no se anulan. En consecuencia, por la definición 7.4 del capítulo IV, una superficie no orientable
no puede tener forma de área.
Supongamos a continuación que Af es superficie orientable en E'. La
demostración del teorema 7.3 del capítulo IV establece, en realidad, una
correspondencia uno a uno entre los campos \Tctoriales normales en 1\1
y las 2-formas en A1. Si U es una normal unitaria, entonces la 2-forma
asociada dtvf es forma de área, puesto que
i1 v
dM(v,w) = U(p)•vXw= +[[vxw[l.
(En la figura 6.18 este número es positivo, puesto que v X w apunta en
la misma dirección que U ( p), pero si invirtiéramos v y w, obtendríamos el
mismo signo menos.)
Por consiguiente, los dos campos vectoriales normales y unitarios en ,\1
determinan las dos formas de área dA! y - dA1 en Af.
1
Orientar una superficie orientable es escoger una de sus dos formas de
área, puesto que eso es lo mismo que escoger una de sus normales unitZlrias.
La determinación del área no es, en realidad, un problema característico
ele la integración, pwcsto que el área es siempre positiva. Por lo tanto, con el
fin de determinar el área por medio de la integración de una forma de
área, conviene tener cuidado con los signos. Supongamos que x es un
326
GEOMETRÍA DE LAS SUPERFICIES EN E
3
vxw
Figura 6.18
2-segmento cuasicarta en una superficie orientada por una forma de área
dM. Por definición,
Aquí tenemos dos casos:
1) Si dA1 (xu, xv) > O, decimos que x está jJosztwamente orientada.
Entonces, ele acuerdo con la definición ele forma ele área,
y, en consecuencia, ffxdM es el área de x(R).
2. Si dM (xu, uv) < O, decimos que x está negativamente orientada. Entonces,
y, en consecuencia
JJxd},f
es menos el área de x ( R) .
Por lo tanto, para encontrar el área de una región orientada y enlosable
mediante la integración de su forma de área que se seleccione, no .podemos
emplear un enlosado cualquiera; el enlosado ha ele ser jJositiz,amcnte
orientado, es decir, debe constar de sólo 2-segmentos cuasicartas que estén
positivamente orientados. Entonces,
A continuación, substituimos la forma ele área por una 2-forma arbiir:lria; así obtendremos la clsfinición que buscábamos.
INTEGRACIÓN
Y
ORIENTACIÓN
327
7.5 DEFINICIÓN. Sea v una 2-forma definida en una región orientada
y enlosable 9? de una superficie. La integral
JJ
donde
X1, · · ·,X¡,
!P
V=~
le
i:::::l
JJ
v sobre
9: es
V
xi
es un enlosado positivamente orientado de !1'.
En esta definición se nos presenta un problema de consistencia: tenemos
que saber que dos enlosados positivamente orientados y diferentes entre sí
de Y dan el mismo valor en la suma de la derecha. La demostración
detallada resultaría un poco larga; se indica el procedimiento general en la
página 103 de la obra de Hicks [5].
Puesto que las superficies compactas son enlosables, la definición anterior nos da, en particular, la integral de una 2-forma sobre una superficie
compacta y orientada.
7.6 CoMENTARIO. Integrales impropias. Hemos definido el área y la
integración de formas en las superficies comjJactas; sin embargo, la idea
de área se extiende con facilidad a una superficie no compacta N. Definiremos el área de N como el supremo del conjunto de todas las áreas de las
regiones cnlosablcs ~)_1 en N:
A(N) = supA(.9l).
Por tanto, A (N) = + oo si no existe el supremo.
En cambio, es en general, imposible asignar un valor -finito o infinito- a la integral impropia JJx f dN. El caso especial en que f > O es
susceptible de que se le estudie como lo hemos hecho con el área; tomamos
H\
f dN
=
sup
JJ
'P
(.Ql enlosable en N).
f dN
f<
O, cambiamos el supremo por el ínfimo. Por tanto, los valores
oo son posibles en estos dos casos. Sea a continuación .SP 1 , ::p "' · · ·
una sucesión de regiones enlosables de N con la propiedad de que 9_l i
está contenida en i:cL\+ 1 , y toda región enlosable de N queda contenido en
una de las
Entonces, de lo anterior se desprende que
Para
+
oo y -
lím
~--~00
JJf f
f
(j
¡
dN
=
lf . f dN.
jJ )\
(Hemos aplicado el resultado correspondiente del área en el inciso ( 3) del
ejemplo 7.2.)
Si ~t' es región enlosable en una superficie jJ orientada por dM, hemos
rl :\f es el úrea ele ~-1'. Con rnús g<'neralid:td, ff, 1J r!J[ nos da
visto que
GEOMETRÍA DE LAS SUPERFICIES EN E 3
328
la integral de una función f sobre fll; esto es una analogía obvia de la
integral habitual J~ f dx de! cálculo elemental. A continuación, estudiaremos una aplicación geométrica de esta idea que tiene mucha importancia.
7.7 DEFINICIÓN. Sea K la curvatura gaussiana de una superficie A1,
y sea fP una región cnlosable en Af orientada por dA1. Entonces, el número
se llama curvatura gausszana total ele !}.
Cuando fP es una superficie compacta y orientada A1, entera, obtenemos la curvatura gaussiana total ele M. Este total es de carácter algebraico:
la curvatura negativa en una parte podrá cancelar la curvatura positiva
en otra.
Para calcular la curvatura total, la definición 7..'i nos enseiia que es
suficiente que sepamos cómo integrar la 2-forma K d},f sobre 2-segmentos
cuasicartas. Pero
JL
K dM
=
JL
x*(K dM)
=
ll
JJn
K(x)x*(dlvf)
=
Jlb
ild
J,¿ JJc
K(x)
y EG-
F" du dv
con la notación habitual de> x: R ---é> Af. Entonces, podemos calcular explícitamente K(x) con la ayuda del corolario 4.1 del capítulo V del lema 6.3.
Por fortuna, aquí los problemas de orientación se resuelven solos; véase
el ejercicio 4 (e).
7.8 EJEMPLO. La curvatura total de algunas superficies
1) !,a curvatura constante. Si la curvatura gaussiana de M es constante, entonces su curvatura total será
Ji
Jv
K dM =K
ll
JJ 1r
dM =K A(M).
Por lo tanto, la esfera ele radio r tiene la curvatura total de 4;r (puesto
que K A (M) se convierte en ( 1/ r") (4;rr 2 ) ) , y la trompeta tendrá curvatura
total de -2;r (puesto que KA(M) se convierte c>n (-1/c") (2;rc 2 ) ) .
2) El toro. Sea x el 2-segmcnto que nos sirvió en el toro T del ejemplo 7.2. Por este ejemplo, la forma de área dT tiene la expresión en coordenadas
x*(dT)
yEG--Pdudv
=
r(R
+
rcosu) dudv
329
INTEGRACIÓN Y ORIENTACIÓN
Pero, en el ejemplo 6.1 del capítulo V, habíamos calculado que
K (x) = (cos u) 1r (R
+
r cos u)
para la misma x. En consecuencia, el toro tiene la curvatura total
H'
K dT =
r" [,
cos u du dv = O.
Por tanto, en el toro la curvatura negativa de su mitad de adentro se
balancea exactamente con la curvatura positiva de su mitad de afuera,
lo cual resulta en la curyatura total de cero.
3) El eatenoide. Esta superficie no es compacta, y su área es infinita;
de cualquier manera, su curvatura total ---que estudiamos de acuerdo con
el comentario anterior como integral impropia- es finita. En el rectángulo
R: -a < u < a, O < v < 2.,., la parametrización del ejemplo 6.1 del
capítulo V se convierte en un 2-segmento cuasicarta que cubre la región
entre los paralelos u= -a y u =a. (figura 6.19). Del ejemplo 6.1 del
capítulo V se desprende que
-1
e cosh" (ule)
K(x)
2
y que
x*(dM) =
y EG du
du =e cosh" (u le).
En consecuencia, la región tiene como curvatura total
JJ
K dM = x
j" J"' -a
"
(a)
du., du---- = - 4.,. tanh --- .
e cosh" (u 1e)
e
Figura 6.19
Cuando a~ oo, esta regwn se expande hasta cubrir toda la superficie;
por tanto, la curvatura total del catenoide es
330
GEOMETRÍA DE LAS SUPERFICIES EN E 3
11
JJ
K dM = -4..- lím tanh
JI
(a) = -471".
C
(/ -fX
Las curvaturas totales que calculamos antes son 47r, - 2r., O y - 4r.;
se trata de un conjunto bastante especial de números. Además, ninguno de
ellos depende del "tamaño" particular (el radio r, la constante e, · · ·)
de la superficie. El corolario 7.10 nos provee de una explicación parcial;
hay otra, bastante profunda, en el capítulo VII, sección 8.
Si F: M.-.,) N es mapco de superficies orientadas, entonces el jacobiano
J de F es la función en 114 de valores reales tal que
F''(dN)
=
J dlvf.
Nos damos una idea del significado geométrico de J si argumentamos de
la manera en que lo hicimos al principio de esta sección. Si v y w son
vectores tangentes muy pequeños en un punto p de jf, generan un paralelepípedo en Tp(}.f) que se aproxima a una región pequeña .~M en lv1.
El carácter del mapa de derivadas F,, es tal que F*(v) y F*(w) son los
lados de un paralelogramo en TP(p) (:V) que se aproxima a la región imagen F (!:>.1!4), como se ve en la figura 6.20. Por la definición de jacobiano,
tenemos que
J(p) dM(v, w) = (F* dN) (v, w) = dN(F,,v, F,w).
(*)
Aquí, 11 v X w 11 es aproximadamente el área de !:>.M (y lo mismo
tenemos para F(!:>.M)). En consecuencia, al tomar los valores absolutos
nos quedamos con
1
](p)
1
(áreadeAM) ,_, áreadeF(~.H).
Es así como J(p) nos da la tasa en que F expande el área en p. Además,
si AM está positivamente orientada, es decir, si dlvf(v, w) >O, entonces
("') nos hace ver que el signo de d:V ( F,N, F*w) es igual al de J(p). Por
lo tanto, el signo de J (p) nos dice si F conserua o inuierte la orientación
de AM.
1
1
-F
V
Figura 6.20
331
INTEGRACIÓN Y ORIENTACIÓN
En este contexto, diremos que el número
fl ] dM = jJlf
j JJ[
F*(dN)
Jf
es el área algebraica de F(1\1). La explicación anterior nos ha enseñado
que, si no hablamos con mucha precisión, podemos decir que cada pequeña
región t::..M agrega a este total el área algebraica de su imagen· F(t::..M):
1) Positiva, si la orientación de F(t::.M) concuerda con la de N;
2) Negativa, si las orientaciones discrepan (de manera que, aquí, F
ha dado la vuelta a .t::..M) ;
3) Cero, si F reduce t::..Af a una curva o a un punto.
Consideremos el significado que esto tiene en el caso del mapeo de
Gauss (ejercicio 4 de la sección 1 del capítulo V).
La curvatura gaussiana E de una superficie orientada
es el jacobiano de su mapeo de Gauss e: i\1-..¿ :S.
(. \quí, :S es la esfera unitaria, orientada por la normal hacia afuera
U o la forma de área correspondiente, d'5.,.)
7.9
Af
TEOREMA.
e E"
Demostración. Si U= ::S g¡Ui es la normal unitaria con que se orienta
M, entonces el mapeo de Gauss correspondiente es
= (g 1 , g", ge). Observemos que si S es el operador de fonna de M dado por U, entonces
e
-S(v) = \lvU =:S v[g;]Ui(p)
y, por el teorema 7.5 del capítulo I,
En consecuenCia, e* ( v) y -S ( v) son paralelos para cualquier vector
tangente v a M, como se ve en la figura 6.21.
Figura 6.21
Para demostrar el teorema, hay c¡ue exhibir b validez de
KdM = G'(d::S)
332
GEOMETRÍA DE LAS SUPERFICIES
EN E 3
de manera que evaluaremos estas 2-formas en un par arbitrario de vectores
tangentes a A1. Por medio del lema 3.4 del capítulo V,
(K. dM) (v,w) = K.(p) dAf(v,w) = K(p) L:(p)·v X w
=
U(p)·S(v) X S(w).
Por otra parte,
(G*d-;;!,)(v,w) = rl"'i,(G.v,G.,w) = L'(G(p))·G,v X G.,w
Ahora bien, un triple producto escalar solamente depende ele las coordenadas euclidianas ele sus vectores, de manera que G,, ( v) y G.,. ( w) pueden
reemplazarse por los vectores para lelos -S ( v) y -S ( w) . Además, por la
definición_ de G y el carácter especial ele la esfera unitaria :::::, los vectores
U ( p) y U (G ( p) ) son también paralelos (figura 6.21). Por lo tanto, los
dos triples productos escalares ele antes son iguales. La demostración queda
completa.
1
7.1 O CoROLARIO. La curyatura gaussiana total de una superficie onentada M e E' es el área algebraica de la imagen G(.'H) ele su mapeo ele
Gauss G: A1__,. ~Para demostrar esto, es suficiente integrar la forma
K dM
=
G*(d-;i,)
sobre 1\1.
El área algebraica pueck resultar equívoca cuando el mapeo F: A1__,. N
dobla muchas veces a AJ sobre las mismas regiones de N. Por lo tanto, con
fines prácticos, el siguiente caso especial del teorema 7.10 es más sencillo,
pues interviene allí solamente el área ordinaria.
7.11 CoROLARIO. Si
!R es región orientada en M e
E 3 en la que ( 1)
el mapeo de Gauss G es uno a uno (U no es paralelo en diferentes puntos
de !R), y ( 2) o bien K > O, o bien K < O, entonces la curvatura total de
D{ es más o menos el área de G (D\), donde el s1gno es el de K. Además,
esta área no excede de 47T.
(En la demostración intervienen las integrales impropias.) Por ejemplo, consideremos el mapeo de Gauss ele un toro orientado. Aquí, G reduce
las circunferencias superior e inferior de T (donde K = O) a los polos
norte y sur de:::::. Si, como tenernos en la Fig. 5.21, ()e!} son las mitades ele
adentro y ele afuera ele T, entonces G transforma (') (donde K. 2 O),
ele manera inyectiva (uno a uno) , sobre toda la esfera :S, y hace lo mismo
con /) (donde /{<O). Por tanto, T tiene la curvatura total + A (:S) A(::S) =O, como ya habíamos visto en el ejemplo 7.8 al intfgrar explícitamente.
INTEGRACIÓN Y ORIENTACIÓN
333
También como ejemplo, encontramos que la trompeta entera se apega
a la hipótesis del corolario 7 .11. De hecho, como nos lo sugiere la figura 6.22, el mapeo de Gauss transforma inyectivamente su curva perfil en la
cuarta parte de uno de los grandes círculos de ::S. Por lo tanto, cuando se
mueve U alrededor de los paralelos ele H, vemos que G es uno a uno y que
va de B a un hemisferio abierto (sin el punto central, puesto que la orilla
no es parte de B). Por consiguiente, la curvatura total de la trompeta es
- ( 1) A(~) = - 2,.,.. Además, puesto que la trompeta tirne curTatura
constante, podemos encontrar el árra sin necesidad ele integrar explícitamente: la curvatura total - 2,.,. dividida por la cun·atura (constante)
K = -1/ e" nos da el área 2,.,.c", de acuerdo con lo que encontramos en el
ejemplo 7 .2.
En una superficie orientada, es posible reducir la ambigüedad en la
medida de los ángulos, a que nos referíamos en el capítulo II. Si se orienta
la superficie mediante una normal unitaria [;·, entonces, para todo vector
tangente v a Af, U X v es un vector tangente ortogonal a v. Vamos a
pensar que U X v es v que recorre + 90° en rotación. Entonces, si v y w
son vectores tangentes unitarios en un punto ele llf, se define un número {f
como ángulo orientado desde v hasta w cuando
w
=
cos {} v
+
sen {} ( U X v) .
(figura 6.23). Todos los ángulos orientados desde v hasta w tienen, por
consiguiente, la forma {} + 2,rrz, donde n es un entero arbitrario. (Se aplica
el mismo procedimiento a cualquier par de vectores tangentes distintos de
cero: es suficiente dividir por sus normas para obtener vectores unitarios.)
La consistencia es la esencia ele la orientabiliclad: al estudiar una superficie orientada, a la que damos orientación por medio ele una for-
Figura 6.22
334
GEOMETRÍA DE LAS SUPERFICIES EN E 3
-- -
ux ..
............
''
' '\
\
\
w
~----------~~~V
1
Figura 6.23
ma de área dA( siempre emplearemos cartas posrtlvamente orientadas,
dA1 (xu, xv) > O, y campos de sistemas de referencia positiuamente orientados, para los que
(Observemos que, por la definición de forma de área, los únicos valores
posibles de dM en un sistema de referencia son ±l.) En un campo de
sistemas ele referencia positivamente orientado, podemos dar aquí significado geométrico al producto exterior de sus formas duales:
en el dominio del campo de sistemas de referencia. Para demostrar este
útil resultado, es suficiente advertir que los dos miembros tit'ncn el mismo
valor, + 1, en E 1 , E e. La segunda ecuación estructural (corolario 2.3) se
convierte, entonces, en dw 12 = - K dA1.
EJERCICIOS
1 . En una carta de Monge
x(u, u) = (u, v, f(u, v)),
hágase ver que el área ele x(D) está dada por la fórmula habitual
del cálculo elemental. Dcdúzcase de ello que A ( x (D) ) > A (D).
2. Encuéntrrsc una fórmula del árPa de una superficie de re\·olución
arbitrari;-¡, e interprétesela como A = 2-;;LTi, donde L es la longitud
de la curva perfil y h es el promedio de su distancia del eje de revolución (Papo).
335
INTEGRACIÓN Y ORIENTACIÓN
3. Encuéntrense las áreas de las superficies siguientes:
a) La región de la silla de montar z = xy que cubre el disco x 2 + y 2
< c 2 en el plano xy.
b) El catenoide.
e) La cinta de Méibius (ejercicio 7 de IV. 7).
4. Sea M una superficie compacta orientada por d1\1; sea -JI la misma
superficie, orientada por la otra forma de área - d1\1. Demuéstrese
que
a)
JL(c1v1 + c"v")
b)
JLM
1'
=
-
=
C¡
JL
v1
+
Cz
L
J
v"
( c1, c2
constante).
JL
V
(Indicación: Si x(u, v) = x(v, u), hágase ver que X y X tienen orientaciones opuestas; a continuación, véase lo que se dice en el ejercicio 21.
JLf dM = JLM f ( - dM).
d) Si f < g, entonces JLf dM < JLg dM.
e)
(Obsérvese el efecto que se tiene cuando
f = Oo
cuando g = O.)
La propiedad (e) nos enseña a definir la integral de una función
sobre una superficie compacta que es simplemente orientable: cualquier elección de forma de área nos lle\·a al mismo resultado. En
particular, la curvatura total de una superficie compacta y orientable
queda aquí bien definida.
S. La curvatura total de las superficies de revolución. En una superficie
de revolución M cuya curva de perfil es a, sea 2ab la región ("zona")
ubicada entre los paralelos que pasan por a (a) y a ( b) .
a) Hágase ver que la curvatura total deo/abes 2r.(senrpa- senrpb),
donde éstos son los ángulos de penclimte de a en a (a) y en a ( b),
que se miden con respecto al eje de revolución (figura 6.24).
b) Dedúzcase que toda superficie de revolución con generatriz cerrada tiene curvatura total cero.
Si la curvatura generatriz a no es cerrada, entonces es uno a uno
en algún intervalo abierto A < t < B. Defínase, en este caso, la curvatura total como
336
GEOMETRÍA DE LAS SUPERFICIES EN E 3
siempre y cuando existan ambos límites.
e) Compruébese la fórmula en la trompeta y en el catenoide.
a'(b)
a'(a}
Figura 6.24
6. Hágase ver que el mapeo de Gauss ele una superficie Af C E'l es
conforme si y sólo si A1 es parte de una esfera, o si es una superficie
mínima.
7. Encuéntrense las curvaturas totales de las superficies de revolución
de curvatura constante (capítulo V, sección 6 y ejercicios) ; dedúzcanse sus áreas
8. Las formas de área de E 2 son, como es de esperarse, + du du (puesto
que du y du son las formas duales de un campo de sistemas de referencia). La orientación natural de E" se hace por du du; se supone
que siempre se toma esta orientación, a menos que se diga específicamente lo contrario.
a) Por medio de la definición general del texto, hágase \ cr que el
jacobiano de un mapeo
se determina mediante la fómmla habitual
b) Hágase ver que el jacobiano de una carta x: D
~
A1 en una
-¡-
superficie orientada (aquí, D es conexo) es +
EG--= F", donde
el signo depende de que x esté positiva o negativamente orientada.
9. Sea A1 una superficie reglada cuyos rayos son rectas enteras, y supongamos que K < O.
INTEGRACIÓN Y ORIENTACIÓN
337
a) Hágase ver que la curvatura total de 111 es - 2L ( 8), donde 8 es
la curva directriz, con !1 8 )1 = l.
b) Calcúlese la curvatura total de la silla de montar 111: z = xy
con este método, y compruébese el resultado mediante la aplicación
del corolario 7.11.
10. La curvatura total de las superficies cuádricas
a) Encuéntrese b curvatura total del paraboloide hiperbólico, el
paraboloide elíptico y el elipsoide, todos ellos arbitrarios.
b) Muéstrese que la curvatura total clcl hiperboloide de revolución
+ y~)/aZ- z"jc" = 1 es -4rra/va" +e".
Por lo tanto, la curvatura total del hiperboloide ele revolución elepende de las "dimensiones" particulares de la superficie; lo mismo
se cumple en d hiperboloide elíptico ele dos mantos.
M: (.,.; 2
11. Una región simple d en 1H es una región que se puede expresar corno
imagen F(D) del disco u" + z;" ::::= 1 en E" bajo un mapeo regular F.
Hágase ver que podemos enlosar d' por medio de un solo 2-scgmcnto
cuasicarta x de maneTa que, para cualquier 1-forma 1), se verifique
que
donde ,r:t es una curva de arista de x. (Inrlicacii!n: Véase el cjercrc10
12 de IV.6.)
12. (Continuación).
a) Si eJ es una región simple en E", hágase ver que el área de
-~
ef es
L
(u dv - v du),
donde r:t es la "curva frontera" ele c5.
b) Encuéntrese el área de la región E" que eslÚ dentro de la
elipse
13. El ejercicio 7 ele la sección 8 del capítulo VII nos ensc!tarú que-, sr cp
es cualquier 1-forrna en una superficie orient::tda y compacta, entonces
HM dcp =o.
Combínese este resultado con el del ejercicio 3 de la sección 2 para
concluir que, si h es la ~unción soporte de 1\1 C E 3 , entonces
338
GEOMETRÍA DE LAS SUPERFICIES EN E
A (M)
+
JL
hH dM
=
o
JL
I1 dM
+
.IL
3
hK dA1 =O.
Verifíquense estas fórmulas en una esfera de radio r, orientada por
la normal unitaria hacia afuera.
14. Escribamos {} = 4 (u, v) si {} es un ángulo orientado desde u hasta
v. Verifíquese que
a) Si{}= 4 (u,v) y cp = 4 (v,w), entonces{}+ cp
4 (u,w).
b) Si{f=4(u,v),entonces -{}=4(v,u).
15. Sea ,rt: 1---:> M una curva en una superficie orientacb Jf. Si V y W
son campos vectoriales tzmgentes y no nulos en a, demuéstrese que
hay una función difcrenciable {} en 1 tal que {} ( t) es un ángulo
orientado desde V ( t) hasta W ( t) para cada t en l. Decilllos que
{} es una función angular desde V hasta W. Observemos que dos
cualesquiera difieren en un múltiplo entero de 2... (Indicación: Redúzcase este problema al del ejercicio 12 de II.l.)
16. Un mapeo F: M---:> N conserva el área cuando el área de cualquier
región enlosable ![{ en M es igual al área de su imagen F (!R) en N.
(Nótese que un mapeo así ha de ser uno a uno.) Verifíquese que
a) Un mapeo uno a uno F: M-> N consen·a el área si
EG- P
=
EG- P
para toda carta x drntro de 1\1, donde :X = F(x) en N. (Indicación: Hágase ver que F transforma cnlo,ados en enlosados.)
b) Las isomctrías conservan el área; las superficies isométricas tienen
la misma área. Inclúyase el caso no compacto.
e) El mapeo ( 1) del ejemplo 5.2 del capítulo IV conserva al área,
aunqm~ no es isometría. Dedúzcanse las ft>rmubs estándar del
área de una zona de la esfera. (Es suficiente en (a) considerar
una sola pararnetriz:oción x si cubre la totalidad de ,H.)
17. Si F: ],1-) N es un mapeo de una superficie orientada mn jacobiano
], h:'tgase ver que:
a) F es regular ~;i y sólo si 1 no es nunca cero.
b) F conserva el área si F es uno a uno y si J = -+-l. (Tamhién se
verifica el enunciado recíproco.)
e) Si F es isomctría, entonces 1 = ± 1, pero el enunciado recíproco
es falso.
Puesto que solamente nos ocupamos aquí de superficies conex:1s, (a)
nos enseña que todos los mapeos F ele ésos se separan en dos clases:
INTEGRACIÓN Y ORIENTACIÓN
339
los que conser::Jan la orientación (]>O) y los que in;!ierten la orientación
0). Con la excepción de las cartas (ejercicio 8), nos valen10s de este
concepto, sobre todo en el caso fácil en que F es ic.ometría.
(/ <
18. Si F: "H ---o> JI] es isomctría ele superficies orientadas, hágase ver que
F conserva la orientación si y sólo si se cumple una de las condiciones
sigui en les:
a) F(dM)
=
dM.
b) F'(U(p) X v) = U(F(p)) X F(v) para todo:; los vectores t;¡::~;cntes V ;o JI cn_p
orientan M y J'>f).
u· y l.' son bs normales unitarias con que se
el F(p)•v X w = U!F(p))·F.(v) X F.(w) para tocio:< los p;ucs ele
vectores tangente-s.
d) En cualquier campo de sic:temas de rcfnencia que c:;t{: nositivamente orientado lé· 1 , E. r;1 Jf, F.:.(E 1 ) , F:.(EJ es 1.111 campo de
si:;tcmas ele referrncia en Af que está positivamente orientado.
19. Si F: 111 -> N rs un difeomorfisrno que conserva la
de superíicics compactas y orientadas, hágase ver que
a)
fL
F'(v) =
Jf
o:ientación
:v v,
p:1ra cu::l(1Uier 2-form:¡ en N. (Jndiraci1Ín: ejerclCIO 8 el(: IV.6.)
b) Dedúzc;:se que la cnrvatura total es una in.-;1riante isométrica en
suprrficies orientables y compactas.
e) Extiéndase ( b) al caso no compacto, en el que habrú que suponer
o bien que J{ > O, o bien que K ;:=:: O.
20. El maf!eo de Gauss de algunas sujJerficies mínimas. Denmb;trcse que:
a) lc'l catenoid r:. G es nno a uno y su imagen cubre toda la esfera
con la excepción d-: dos puntos.
b) El helicoide. La imagen ele G omite exactamente dos punlos de la
<'c[cra, y a cada punto de su imztgen llega un número Í;¡[inito
de puntos del helimidc.
e) La superficie de Scherk (ejercicio 21 ele V.4·.). Lo mi;.rno del
helicoiclc, con la excepción ele que aqui son cuatro les puntos
cr,e se omiten. (lndicacicin: Considérese Z ,= \lg en una de las
rectas verticales.)
,; Cuáles son las curvaturas totales de estas superficies':'
21. En una superficie orientada Af, sean x y y 2-scgrnentos cua~:icartas
con la misma imagen x(D) = y(E). Para cualquier 2-forma 1·, verifíqursc que
340
GEOMETRÍA DE LAS SUPERFICIES EN E
3
donde se toma el stgno más s1 x y y tienen b mzsnw orientación
(positiva o ncgati\'a), y el signo menos si ticnr'n orientaciones opuestas.
(Indicación: Examínese el signo del j:tcobiano de y- 1 x y empléese
la fórmula de cambio ele ,-ariables para integrales dobles.) •
8
Congruencia de superficies
Dos superficies JJ y Al[ son congruentes cuando existe una isoml'tría F ck
E" que transforma exaetanwnte 1H en j\,f. Por lo t;mto, las superficies
congruentes tienen la misma forma: sólo pueden diferir por su posición
en E-1 . Por ejemplo, dos esferas cualesquiera cld mismo radio son congruentes (se aplica la traslación que lleva un cPnt ro al ot1 o n·nt ro), y bs
superficies
lv1: z =.\y
y
Af: z =
x"
+ :v"
2
son congruentes mediante una rotación de 4.J 0 alrededor del eje de hts z.
Para simplificar nuestra e~:posieión, supondremos q<cc bs 'upnficics
con que trabajaremos en esta sección son todas oricntaules y conexas.
8.1 'fECJREi.\IA. Si !<' es isornctría euclidiana tal que F(Jf) = if, entonces la rPstricción ele F a Af es una ism :wtría P = F ! J!: J f -~ if de
superficies Además, si 1\1 y 1Ü cslún aclecuadall!ente orientadas, eutonces
F conserva los operadores de forma; es dcci t-, que
F,,(S(v)) = S(F,(v))
para todos los vectores tangentes v a 1\1.
Dicho con brevedad, las s1'jierficics coílgmcntcs son isomc'tricas y tic··
nen, en esencia los mismos opnaclores de fonn;L Insistiremos, sin embargo,
en que las superficies isornétricas no son ncasariamcnie congrun;lcs, debido
a que, como ya sabernos, pueden tener formas muy difercuk~, en E'.
Demostracit'm. Sabemos, por el capítulo IV, sl·cciún 5, C[Ue "la r::stricción F: 111 ~M es un wapeo. Ademús, los lllapas de dcriv;;cb'; cic F y F
concuerdan en los yectorcs tangentes a JI. De hr·~·ho, si v C"i t;mgcnte a
.il.f, entonces v es la n·lociclad inicial ele alguna n;¡ya '" en ~~!: puesto que
F = F ; JI, tenemos que
F(a)
F(a).
Por tanto,
F,,(v)
F (a)' (O)
F(a)'(O)
341
CONGRUENCIA DE SUPERFICIES
Advertimos inmediatamente que F,, conserva los productos escalares
de vectores tangentes a Af, pues F,,, tiene la propiedad enunciada para todos
los pares ele vectores tangentes (corolario 2.2 capítulo III). También,
F: M--¿ M es uno a uno (al serlo F) y sobre (por hipótesis); en consecuencia, F es isometría de superficies.
Por último, demostraremos que F conserva los oper:1dores de forma.
Si 1'vf se orienta mediante la nonual unitaria U, entonces, puPsto •que F,
conserva los productos escalares (y concuerda con F,, en Jf), concluimos que
la longitud ele F* (U) es unitaria y que es normal a F (M) = iÜ en todas
partes. Por lo tanto, hay una de las normales unitarias en M, digamos
concretamente
con la propiedad de que
e,
donde
Si S y S son los operadores de forma en ~;f y
vamente de
y
verificaremos que
u
a,
F:,(S(v))
=
p=
M,
F(p).
que se deducen respecti-
S(F,,,(v)).
Sea nuevamente a una curva en M con la velocidad inicial v. Por lo
tanto, F(a) es una curva en M con la velocidad inicial F,(v). Si restringimos U a a y [] a F (a), entonces F,, (U) = [] (figura 6.25). Puesto que
F* conserva las clt>rivadas de los campos vectoriales, obtenemos
F,,,(S(v)) = -F,,(U' (O))=-[!' (O)= S(F*(v)).
Pero v y S (v) son tangentes a }vf; en consecuencia, bien podemos substituir F* por F,,.
1
En seguida, nuestro objetivo será el teorema recíproco, es decir: si
M y M son isométricas y tienen los mismos operadores ele forma, enton-
.
Figura 6.25
GEOMETRÍA DE LAS SUPERFICIES EN E 3
342
ces M y A1 son congruentes. Esto es una analogía del resultado fundamental (teorema 5.3 del capítulo III) con respecto a las cun·as. La
condición de la isometría de M y M corresponde a la hipótesis ele que
a y f3 son curvas de rapidez unitaria definidas en el mismo intervalo y la
de "operadores de fom1a iguales" corresponde, por supuesto, a
K=
K,
1
= -t-T.
8.2 LEMA. Sea F: M ---7 M una isometría ele superficies orientadas
en E 3 que conserva los operadores de forma (como teníamos en el teorema
8.1). Sea E 1 , E 2 un campo tangente de sistemas de referencia en Af; Et,
E2 el campo transferido de sistemas de referencia en Jf. Si E" y E:: son
bs normales unitarias con que se orientan Af y )\{, entonces E 1 , E 2 , R,1
y E1 , i: 2 , R:; son campos adaptados de sistemas ele referencia en llf y i1.
Para las formas ele conexión de estos campos de sistemas de referencia,
tenemos que
(1 < i,j < 3).
Demostración. Ya sabemos, por el lema 5.3, que F''(!0 12 )
falta demostrar que
F*(wi:;) =
"'12-
Nos
para z = 1, 2.
wi 3 ,
Pero el corolario 1.5 nos enscfía que esto simplemente expresa la conservación ele los operadores de forma en términos ele las formas ele conexión.
De hecho, para j = 1, 2,
P·(w;,,) (Ei) = wi3(F,Ej) = S(F,E¡) ·Ei = F(S(Ej)) ·F(Ei)
=SE¡· Ei = w;, (Ei).
En consecuencia, las formas F*(w; 3 ) y
wi 3
1
son iguales.
8.3 TEOREMA. Sea F: Af ---7 Af una isometría de superficies orientadas
que conserva los operadores ele forma; es decir,
F,.(S(v))
=
S(F,.(v))
para todos los vectores tangentes v a M. Entonces, Af y i1 son congruentes:
de hecho, existe una isometría F ele E 3 tal que F = F ¡ ,1J.
(Si se tuviera que
F,(S(v)) = -S(F,(v))
1'' ,.,, todos loe: vectores tsngcntes, •·ntonces >cría
TJ1: 1 r'ic~,71 l1e
o c1r- }~j rlrlr:l ;q:11t~-¡r 1~ J'~p{)L'~!':
~:nficir·ntP
c:e1
;:'n-rtir
('~;u1~(·;:;dn.';
la
343
CONGRUENCIA DE SUPERFICIES
Demostración. Tornemos un punto fijo p de "H y sean Ee y E3 las
normales unitarias con que se orimtan JI y i\1. Al aplicar el corolario 2.3
del capítulo III, se ve con facilid<:ld que hay una isomctría única 1:<~ de E 3
que concuerda con F en el punto seleccionado en el sentido de que
F(p)
= F(p)
F* (v) = F,, (v)
para todo vector tangente v a
F,,(E3(p)) = ¡,; (F(p) ).
1\f
en p
Demostraremos que F es la isometrb euclidiana que se necesita; dicho de otro modo, lJUe F (q) = F ( q) para un punto arbitrario q de lvf.
Por lo tanto, si a es una curva de Af que va de p a q, es suficiente demostrar que F(a) = F(a).
No se pierde generalidad al suponer que a descansa en el dominio de
un campo adaptado de sistemas de referencia E 1 , Ec, E 3 en iH. (Si esto
no fuera cierto, podríamos partir a en segmentos en los que fuese, para
Figura 6.26
repetir, en esencia, la demostración que haremos en seguida con respecto
a cada segmento.) N"uestro plan es empkar el criterio general del teorema
:J. 7 del capítulo III para demostrar que las curvas F (a) y F (a) son
idénticas.
A La CUlTa F(a). Restringiremos el campo ele sistemas de referencia
E 1 , Ec. E:: a la curva a (figura 6.16). Entonces, según las ecuaciones de
conexión,
(l:=::is3).
A continuación, apliquemos F,,, a esta igualdad; como
serva las derivadas, obtenemos
(1
!<~,
~i:S3).
es lineal y con-
(Al)
También, 1<\ conserva los productos punto; en consecuencia, F,,E1 , F,E~,
:FJ:,; es el campo de sistemas de referencia ele la curva l<,(a). AcleEJás,
(:\2)
GEOMETRÍA DE LAS SUPERFICIES EN E 3
344
puesto que
F(a)' = F,,(a').
B. La curva F(a) = a. Apliquemos la isometría F para transferir el
campo tangente de sistemas de referencia E 1 , E 2 a un campo tangente de
sistemas de referencia E1 , H2 en M. Al tomar en cuenta el campo vectorial
E 3 tenemos aquí un campo adaptado de sistemas de refert¡1cia E1,
E 2 , E 3 en M· Vamos a restringirlo a la curva imagen F(a) =
remos las ecuaciones ele conexión anteriores para obtener
a,
y emplea-
(Bl)
(l<i<3).
Además, afim1aremos que se verifica la igualdad
(1 <i<3).
(B2)
Para i = 1, 2, esto es consecuencia inmediata de la definición de E1, E 2
puesto que F* es isometría y
a' = F (a)' = F, (a').
Para i = 3, los dos miembros se anulan, puesto que a y a son respectivamente curvas en A1 y en M.
C. Comparación de F(a) y F(a) =a. La construcción anterior, junto
con la hipótesis de que F conserve los operadores de forma, nos reproduce
exactamente la hipótesis del lema anterior; en consecuencia, p-x· (!;,ij)
= Wij para 1 < i,j < 3. Por consiguiente,
Wij(a') = wu(F:,(a')) = (P"úiij) (a') = Wij(a')
..
o
Nos valemos de este hecho para deducir ele (Al) y (Bl) que
(F~Ei), o KEj =
E/
o
Ej
(l<i,j<3).
(Cl)
(1 <i::-::3).
(C2)
Al comparar ( A2) y ( B2) . obtenemos
F(a)'oKEi
=
a•Ei
Y, de acuerdo con nuestra construcción inicial, tenemos que
F,E¡ = Ei en el punto p = it(O)
(C3)
=
F(a(O))
(1 < i < 3.
Si nos referimos a las ecuaciones U) del teorema 5. 7 del c<lpÍtulo III,
observaremos que las tres ecuaciones ( C 1) , ( C2), ( C3) son precisamente
lo que necesitamos para concluir que F (a) = ii; es decir, que
. F(a)
=
F(a).
1
345
CONGRUENCIA DE SUPERFICIES
Este teorema nos da la demostración formal de que los operadores de
forma de una superficie A1 en E 3 describen completamente, en realidad,
su forma.
EJERCICIOS
1. Una superficie Af C E" es rígida cuando toda superficie isomarica
a "H es congruente con 111. Declúzcasc del teorema ele Licbmann que
las esferas son rígidas.
2. Si rr, (1: l ~E' son curvas de r:1pidez unitaria con K['l = K~ > O y
TIT = TP,,
hágase ver que sus superficies tangentes son congruentes.
(Compárese esto con el ejercicio 5 ele \'!.4.)
3. Si Af
y N son superficies congruentes en E" y si F es una isometría
euclidiana con la propiedad de que F("H) = N, demuéstrese que
F Af conserva las curvaturas gaussiana y media, la curvatura principal, las direcciones principales, los puntos umbilicales, las cun·as
asintóticas y principales y las geodésicas. De éstas, ¿cuáles quedan
conservadas por ismnetrías arbitrarias F: M---¿ N? (Indicación: Oriéntese localmente, sin tornar en cuenta las ambigüedades de signo
en H, k, y k,.)
1
4. Si F: ::S ---¿ ::S' es una isometría de esferas, demuéstrese la existencia
de una isometría euclidiana F tal que F = F [ ::S.
S. Sea M la silla de montar (z = xy). Una rotación~ de 90~.. ~ . · .
una reflexión en el plano xy resulta en una transfor~~or~ __ ,
e de E 3 , con la matriz
1~:- · ·'
1¡G"~'.
N~ '
•..
fl.'",.,
u"'
. r.
·•p . .-.,. ...
;r:.M
o~
..
J\:~::.~, ",.-·~'l;li)
'\1;¡.
(','i' < .
. or-., """
,, . f: ,
. '
• ~
'.:<.~
·..... ..~.,-,.
,.(
• ,, . ..-"'f
(Según lo que hemos convenido, las columnas de la matriz son e(u 1 ),
e (U e), e (U"), donde l l i es el Í-ésimo punto unitario.)
a) Demuéstrese que
(jH) = M.
b) Sea F = e M: M~ M. Orientemos A! (como dominio de F)
mediante la normal unitaria U tal que U(O) = u 8 . ¿Para qué
orientación de A1 (como imagen ele F) tenemos que F conserva
los operadores de forma?
e
1
346
GEOMETRÍA ')E LAS SUPERFICIES EN EB
6. En la descripción general de una superficie de revolución de la página L:i5 (se obtiene A1 cuando C gira alrededor de A), sea A la
recta que pasa por p en la dirección del \TCtor unitario c 1 , y sea
a(u)
=
p
+
g(u) c 1
+
h(u)
Ce
una parametrización de C, donde e" es un \Tctor unitnrio ortogonal
a e1.
a) Encuéntrese un mapeo regular x: D----:> E" cuya inngen sea el
conjunto l'vf. A continuación, demuéstrese que:
b) A1 es congruente con una superficie ck rc\·olución en la posición
especial descrita en el ejemplo 2.5 del capítulo IV.
e) A1 es superficie en E'3 •
d) Dos superficies ele revolución serún congruente-s :o,i y sólo sr se les
puede describir de esta marwra por medio del mismo par de
funciones g, h.
7. Si M es superficie en E 3 , una isometría euclidiana F con la propiedad
ele que F(M) = M se llama simetría euclidiana de i1L Hágase ver
que
a) El con junto de todas las simetrías euclidianas de k[ forma un
subgrupo cf (A1) del grupo
de todas las isorneü·í;1s de E" ( ejercicio 7 de III.1). ceS (M) se llama grupo de simetrías euclidianas
de ;'vi.
b) Los grupos de simetrías euclidianas de superficies congruentes
son i oomorfos.
e
8. Verifíquese que el grupo de simetrías euclidianas de cualquier c;;fera
es isomorfo con el grupo de todas h1s matrices ortogonales 3 X 3.
9. Encuéntrense las ocho simetrías euclidianas de la silla de montar
,\1: z = x;·. Hágase ver que con transformaciones ortogonales y dense
sus matrices.
1 O. Encuéntrense todas bs simctrí:::ts euclidianas del elipsoide ,1' 2 / a 2 + ')' 2 /
b 2 + z 2 /c 2 = 1, donde a> b >c. (Indicación: Aplíquese el resultado ele que se conserva la curvatura gaussiana.)
11. Si lvf es la superficie de Scherk (ejercicio 21 de V.4) y D es el cuadrado abierto -.,. /2 ::=:: u, v < "/2, Yerifíqucse c¡ue:
a) La imagen x(D) de x (ejercicio 4 ele V.4) descansa en Jf.
b) La porción de A1 sobre cualquier cuadr;¡do abierto (ejercicio 21
d<~ \'.·}) es congruente con x!D).
e) L::s fórnmb<> ele CU1Y:ltura quP ~:e dieron '·n Íos eicrcicios que
:"'l:':li-<nnr¡'; de Tí 1 enci~. n~1r son con::istcn:cs.
RESUMEN
9
347
Resumen
El estudio geométrico ele una superficie .\f en E" distingue tres categorías
distintas:
1) La geometría intrínseca de Af.
2) La forma de Af en E 3 •
3) La geometría euclidiana de E 3 •
Vimos en los capítulos li y III que la geometría de E 3 se basa en el producto escabr y que consiste en los conceptos que las isomrtrías de E 3
conservan. De la misma manera, aquí hemos descubierto que la geometría
intrínseca de M se basa en el producto escalar -2plicado solamente a los
vectores tangentes a M- y que consiste en todos los conceptos conservados por las isometrías de Af.
La forma de M en E 3 constituye, de cierta manera, un vínculo entre
las dos geometrías. Por ejemplo, la cu1Tatura gaussiana K es una característica esencial de la geometría intrínseca de M, y el operador de forma
S domina la categoría (2); por tanto, la ecuación
K= det S
nos enseña que las geometrías de ( 1) y (3) sólo se pueden armomzar
mediante restricciones impuestas a (2). Si nos expresamos sin rodeos, diremos que sólo determinadas formas son posibles en E 3 {!ara una suj;erficie
M con curvatura gaussiana prescrita. Un resultado fuerte ele este carácter
es el teorema de Liebmann, que afirma que una superficie compacta en
E 3 en la que K. es constante tiene sólo una fom1a posible: la esférica.
En los últimos dos capítulos, se ha hecho el cálculo de ejemplos explícitos sobre todo en términos ele cartas ele coorcknadas ( Causs), pero hemos
expresado la teoría en términos ele campos ele sistemas ele referencia y
formas (Cartan). Desde el punto de vista histórico, las coordenadas también se han empleado para la teoría, pero en nuestros días, la actitud
de Cartan ha desplazado los demás conceptos teóricos generales. Vimos en
la sección 6 que ambos puntos de vista no son tan diferentes cuando la
carta ele coordenadas es ortogonal.
CAPITULO
V11
La geometría de Riemann
En el estudio de b geometría ele uc:1 supel'ficic en E' descubrimos que
algunas de sus propiec~aclcs geométricas m{ts importantes corresponden a
la misma superficie, y no al c:;¡•acio euclidiano que la rodc:1. La cun~at ura
gaussiana ejemplifica estupendamente t~sto: aunque la clcfinimos en términos de los operadores ele forma, pertenece a e:,ta ¡'l'OlllCtría ÍlltlÍm.(ca,
puesto que pasa por la prueba de la invar·ianci:l i:;cn>l-:rica. A mcclicb que
esta situación se les iba aclarando a los matemáticos cld ,;iglo xrx. Riem~mn
pensó en la conclusión correcta: ha de existir una tcorí:: geométrica de
superficies que sea comjJletamente indej1endientc ele E\ una geonwtría
que se construya desde el principio a partir de s1)lo las inv:uiantcs isométricas. En este capítulo, haremos una descripción res m ¡¡ida ele la teoría
que result:1 ele este punto ele vista, y nos concentraremos en sus r;¡.;::;os dominantes: la curvatura gau.ssiana y las geodésicas. Tendremos po;· guías
constantes los dos casos especiales que causaron su descubrimiento: la
geometría intrÍnsPca de superficies en E" y la geometría euclidiana (sobre
todo la ele! phno E".)
Superficies geométricas
Hay sefíaks en nuestro trabajo anterior con la geometría intrínseca ele
supcrficics en E" (así como en la geometría euclidiana) que nos sugwrcn
la necesidad dd producto escalar de \Tctores tangentes para poder construir la geornctria en 11na S'lpníicit'.
Pero para liberarnos del confinamiento :1. E'', hemos c1e comenzar j)Or
Ul1:1 superficie abstracta Jf ( C:1pÍtulo IY, sccciún 8). e: o m o J [ no ticnr·
que estar en E\ no hay producto csccdar: en comwcw·ncia, no hay geometría. Sin embargo. d producto escalar no es sino un caso panicubr del
concepto general de producto interior, y la idea ele Ricmann consistió en
reemjJ!azar el jnodul'to escalar jJor un jnoducto interior muy arbitrario,
definido en cada jJlano tangente de M..
349
350
LA
GEOMETRÍA
DE
RIEMANN
1.1 DEFINICIÓN. Un producto interior en un espacio vectorial V es
una función que asigna '" cada par de vectores v, w en V un número
v o w de manera que se verifican las reglas siguientes:
1) Bilinealidad:
2) Simetría:
vow
= w
ov.
3) Definición positiva:
v o v > O;
En el espacio vectorial
y
E~,
v ov
=
O si y sólo si v
=
O.
el producto escalar
es, por supuesto, un producto interior, pero hay una infinidad ele ellos,
corno es, por ejemplo, v o w = 2v 1 w 1 + 3vc1Cc. (Véase el ejercicio B de
la sección 2.)
Así pues, al desplazarnos ele las superficies en E" a las superficies abstractas y del producto escalar a los productos interiores arbitrarios, obtenemos la siguiente definición:
1.2 DEFINICIÓN. Una mperficie geométrica es una superficie abstracta
A1 provista de un producto interior, o, en cada uno de sus plzmos iangentes. Este producto interior ha ele ser difrrenciable en el é;enlido ele que,
si V y H' son campos vectoriaks ( difercnciables) en A!, entonces V o W
es una función de valores reales clifcrcnciable en j{.
Insistiremos en que cada plano tangente Tp (!vi) posee su propio producto interior y el de uno no se relaciona con los de los demás, a no ser
por la condición de diferenciabiliclad; ésta es una necesidad obvia para
una teoría que se basa en el cálculo. En esta definición, V o W tiene el
sentido habitual de operar punto por punto: es la función ele A1 cuyo
valor en cada punto pes el número V(p) o\V(p). La a;;i(?;n;cción de productos interiores a los planos tangentes --como la de la definición 1.2se llama estructura geométrica (o tensor métrico, o "ds~") en ivf.
Con brevedad, decimos:
Superficie
+ estructura geométrica =
superficie geométrica
e insistiremos en que si la misma superficie está provista de dos estructuras geométricas diferentes, tenetnos dos superficies geométricas distintas .
.
SUPERFICIES GEOMÉTRICAS
1.3
EJEMPLO.
351
Algunas superficies geométricas.
1) El plano E 2, pro\'isto del producto escalar habitual en los vectores
tangentes, es la superficie geométrica que se conoce mejor. Su geometría
es la geometría euclidiana bidimensional.
2) Una manera sencilla de obtener nuevas superficies geométricas consiste en distorsionar las que ya se conocen. Por ejemplo, si g > O es cualquier función diferenciable en el plano, y si • es el procluctQ escalar
habitual, definamos
para los vectores tangentes y y w a E" en p. Esta es una nueva rstructura
geométrica en el plano, ele la qnc se dice que PS conforme a la del producto escalar (ejercicio 1). Veremos que (a meno:- que g sea ec;pccial) la
superficie geométrica que resulta tiene propieclaclcs muy diferentes ele las
de] plano euclidiano l.
3) Si 1U es una superficie en E\ entonces el producto e,ctlar de E 3
aplicado a los vectores tan,é',L'ntcs en Af nos provee ele un producto interior
que hace de Af una supcríicie geométrica. Esto es, por supuesto, lo que
hicimos en los capítulos V y VI. A menos que se mencione expresamente
otro producto interior, siempre supondremos que una superficie de E 3
adquiere su carácter geométrico de csUl manera.
Aquí es importante que digamos algo act>rca de nuestra terminología.
El nombre ele Euclides tiene implicaciones geométricas. En consecuencia,
en el capítulo I, en que no aparecía la geometría, debíamos haber lhmnclo
plano cartesiano a E", ele manera que reservásemos el término plano euclidiano para la superficie geométrica ( 1) que acabal!lOS de definir.
A partir del sencillo principio de la definición 1.2, es bastante sorprendente la riquez:1 ele la teoría geonH':lrica que :;r puede comtruir. Pero,
como ya lo clijirum, lo:; r j('mplos ( 1) y ( 3) nos indican con clari(bcl que
la teoría ya está allí para que la exploremos, y sus rasgos comunes incluso
nos sugieren la clase de resultados que podremos esperar.
Emplearemos aquí, sin más explicaciones, las definiciones del capítulo VI que eran claramente intrínsecas en su carácter. En particular, definimos una isomctría F: Jf ----3> Af de superficies gf:ométricils arbitrarias ele
la m~mcra en que lo hicilllos en la definición 4.2 del capítulo VI, y tendremos que la geometrh ele "H se compone, por definición, de sus invariantes isométricas. Un camf!O de si.stemas ele referencia en una superficie
geométrica arbitraria 1H consta, como ya es habitu:1t de dos campos vectoriales ortogonales y unitarios, R 1 , E" que se definen en algún con junto
abierto ele Af. Las ecuaciones ele orto"rxrna lidad
(1 < i, j < 2)
352
L <\ GEOMETRÍA DE RIEMANN
se expresan, por supuesto, en términos del producto interior de 1\!1. Como
antes, deducimos las 1-formas duales {) 1 , 8e, caracterizadas por {ji (Ei) =
8;¡, y, en seguida, la forma ele conexión we = - "'"'' caracterizada por
las primeras ecuaciones estructurales
Haremos una vez más hincapié en que estas formas {)" 8e, "''" no están
ajustadas ele manera invariante a b superficie geométrica 1H; al elegir
diferentemente el campo de sistemas de referencia
flc se producirán
1,
E
formas diferentes O,, De, éú 1 c. Antes de avanzar mús, cmtvicnc que yeamos
la manera en que se relacionan esos dos conjuntos ele formas.
En una \Tcinclad suficientemente pcqucíi1 de
mt p<u1to p, la :1plicación cuidadosa ele la función
i:tver;;a cos- 1 (o sen-') rcsu!tarú en una fuución difcrcnci<Jhk ,, con la propiedad de que
Llam::trcrnos a ~' f¡¡nción angular desde F,, Ec
hasta E 1 Ec. Como se ve en la figura 7.1, tenemos
aquí dos posibilicbdes para E 2 • O bien
Figura 7.1
Ec
=
-sen cp E 1
+
cos '? ]•;e,
en cuyo caso dirctllos que E 1 , Ee y ]:' 1 , E .. tienen la misma mientarión,
o bien
E" = sen rp E, - cos rp flc,
donde serán ele orientaciones o puestas.
1.4 LEMA. Sean li1, E 2 y R1 , Ec campos de sistemas de referencia en
la misma región de .H. Si estos campos de sistemas de referencia tienen:
1) La misma orientación, entonces
y
2) Orientaciones opuestas, entonces
y
Demostración. Examinaremos solamente el primer caso, puesto que
el segundo se obtiene del primero mediante un simple cambio de signos.
:Mediante las fórmulas de las b<bCS (lema 2.1 del capitulo VI), ]a, ccuaeJOnes
resultan en
-
81
=
cos rp 8 1
-
-
sen rp 02 ,
{)z =
senrp01
+ cosrpOz.
(*)
353
SUPERFICIES GEOMÉTRICAS
Si aplicamos la derivada exterior a la primera de estas expresiones, obtenemos
A continuación, tomaremos en cuenta bs primeras ecuaciones estructuradas
de d0 1, d0 2 para obtener
d01
= (bi12- d<p)
1\
(sen<p01
+ cos<p02)
(ffi1z- d<p) 1\ Oz.
Y, de la m1sma manera, obtenemos
Puesto que la forma úJ 12 = -," 21 satisface de manera única las pnmeras ecuaciones estructurales, concluimos, a partir de las dos últimas
ecuaciones, que ú) 12 = 0112 - d<p, como queríamos. Los cálculos directos de
r-~----------~
-
X
D
Figura 7.2
01 1\ 0 2 por me~io de_ la fórmula (*) de antes, nos enseñan que esta 2-forma es igu:~l a 01 1\ Oz.
1
Podemos us~tr el concepto de superficie geométrica para llenar una
laguna de nuestro trabajo anterior. A veces nos encontramos con mapeos
regulares X: D ~ E 3 que no eran parametrizaciones de ninguna superficie
en E 3 • Por ejemplo, la imagen x(D) de D se puede doblar sobre sí misma
y cruzarse (como se ve en la figura 7.2), de manera que la definición de
superficie en E 3 no se pueda aplicar en la recta de intersección L.
Podemos eliminar esta dificultad técnica si asignamos a D (que es
una superficie) no el producto escalar habitual, sino el producto interior
inducido
V OW = X,,, (V) •X,, ( W) .
¡ '. l: /, .
354
LA GEOMETRÍA DE RIEMANN
Por lo tanto, D se vuelve superficie geométrica, y si x(D) fuera una superficie en E·\ x sería evidentemente una isomctría. Con brcved:1d, tenemos que D tiene exact;:unente la geometría intrínseca que es de esperarse
intuiti\·amcntc en x(D).
En este capítulo, así como en los anteriores, no es esencial la restricción
;¡ dimensiones bajas. Una superficie es el caso bidimensional dr la idea
general de variedad (capítulo IV, sección 8). U na Yariedacl Af de dimensión arbitraria, provista ele un producto interior ( diferenciable) en cada
uno de sus espacios tangentes, se llama c'aricdad de Riemann. y la geometría que resulta se llama geometría de Riemann. (La geometría euclidiana. como se explicó en el capítulo III, es el caso especial ele la geometría
de Ric;nann que se obtiene en el t'Spacio euclidiano E" con el producto
esrabr habitual.) Por lo tanto, una sujJerfiric geométrica es To mismo que
una c•ariedad bidimensional de Ricmann, y el tema ele este capítulo es la
geometría bidimensional de Riemann.t
EJERCICIOS
1. Con respecto a una estructura geométrica conforme en el plano ( ejemplo 1.3), verifíquese que
a) La fórmula
V oW =
11 V 11 11 W 11 COS {}
(donde
11
v
11 =
y' v o v)
tiene el mismo valor para el ángulo O ~ {} < " que forman v y w
que tiene en el plano t'uclicliano E".
(----,-;:;---, 2'
b) La rapidez ele una curva a= (ct 1 , a 2 ) es va 1" +a" jg(a).
e) gU 1 , gU" es campo ele sistemas de referencia con las formas duales
dujg, dvjg.
d) Las formas de área son +du du / g 2 •
Obsérvese que si g = 1, tenemos la estructura euclidiana habitual.
2. El semiplano de Poinearé es el semiplano superior v > O provisto del
producto interior (o) que se obtiene al dividir el producto escalar en
cada punto p por el cuadrado ele la distancia v (p) = p". al eje ele
las u:
En la curva ct( t) = (re os t, r sen t), O < t < ,., encuéntrese la rapidez y la función de longitud ele arco (mídase desde la parte mús alta
ele la semicircunferencia, t = ,.¡2.)
t PrefPriríamos llam:1r a las superficies geométricas superficies de Riemann,
pero este término tiene significado muy distinto y de uso bien establecido.
SUPERFICIES GEOMÉTRICAS
355
3. a) En una superficie geométrica Af, sean V y W campos vectoriales
que son linealmente indepenclicntcs. Encuéntrese un campo de sistemas de referencia para el cual se \'erifique que E1 = V/ JI V 1[.
b) Dedúzcase una fórmula explícita de un c:tmpo ele sistemas de referencia en la imagen de una carta arbitr~~ria x dentro ele Jf.
4. Si dA1 es forma de área en A1 y si v es una 2-forma ~¡¡ bitraria. ckmuéstrese que hay una función f con la propit·clad de que v = / dJf. Dedúzcast~ que una superficie gemnéLricl (conexa) que sea oricntable
tiene exactamente dos formas de úrea, -+-eL\f.
5. Sea 111 una superficie geométrica orientada por la forma de área d.H.
Demuéstrese que
a) En cada espacio tangente ;¡ Jf, exi,te una "rotación de 90°,"
única, es decir, un operador lineal J: Tp(M)--;. Tp(M) es la propiedad de que
1! J(v) 1!
=
1! v [],
J(v) ov =O,
y que
dM(v, J(v)) >O (si v =;i= O).
(Indicación: Si E 1 , E~ es un campo de sistemas de referencia positivamente orientado.
decimos ~colectivamente, para todos los puntos de 1\f-,- que estos
operadores son el operador de rotación "f de "H.
b) J es difcrenciable (] (V) o J (W) es difcrenciable para cualesquit:'ra
campos \TCtoriales V, W) y antisimétrica
](V)oW-1-Voj(W) =0,
y F = -1 (la aplicación doble de J resulta en menos el operador
identidad).
e) Si, en cambio, se orienta Af mediante -d."!, entonces su oper::ldor de rotación es -].
d) Si ,\1 es superficie en E" y se da w orientación por medio de la
normal unitaria C, entonces ] (V) = C X T·.
El operador J sirve de una especie de substituto de la normal uniwria en las superficies que no son de K'. Fn p:1rticubr, ( d) nos em2ña
que el procedimiento descrito en el c:1pítulo VI (página 333) par:1 la
medición de ángulos oricnt:1dos se :1plica aquí a cualquier superficie
geométrica (orientada).
t Compirese esto con e 1 caso especial del ejercicio 14 ele b
capÍlillo II.
sección 4 del
35~
LA GEOMETRÍA DE RIEMANN
6. Si F: .M---;. N es un m apeo regular ele supnficies geométricas orientadas, hágase \'er que Jos enunciados siguientes son equivalentes entre sí:
a) F conserva la orientación y es conforme (definición 4.7 del capítulo VI).
b) F conserva los operadores de rotación de 1i! y N: es decir,
F,.(J(v))
=
f(F.(v))
para todos los vectores tangentes v a 1U.
e) F conserva los ángulos orientados; es decir, si 1'r es un ángulo desde
v hasta w, entonces {} es también el ángulo desde E, ( v) hasta
F,,(w).
7. Demuéstrese que un mapeo regular F =
orientación y es conforme 'f si y sólo si f,
(/,
g): E 2 ---;. E" conserva la
= gv, fv = - g".
Si tomamos E" como el plano complejo, con z = u + ic· = (u, v),
estas el os ecuaciones (las ecuaciones de Ca u e h.v-Ricmann) son necesarias y suficientes para que F sea una función compleja analítica
z---;. F(z).
b) A partir de una función compleja F ele ésas, demuéstrese que su
escala A. (z) es la magnitud de la derivada (compleja) dF / dz.
8. Si eliminamos el origen de E", hágase wr que el mapeo F del inciso (2)
del ejemplo 7.3 del capítulo I conserva la orientación y es conforme.
¿Qué función compleja es la que tenemos en este caso:'
9. Sean D y E regiones del plano, provistas ele estructuras geométricas
conformes, dadas respectivamente por g 1 y ge. Sean D' y E' las mismas regiones, con la estructura euclidiana habitual. Si F: D'---;. E'
es un mapeo conforme con escala A., demuéstrese que F: D ---;. E es
confonne con escala ,\g 1 /gc(F).
2
La curvatura gaussiana
En las superficies geométric:cs ~ubitwri:1s, necesitaremos de una nueva
definición de la ;·urv;¡ g:tussi:cna. L:1 ddinición 1{ = dtt S qúc rli1nos
en las superficies en E" canee aquí de sentido, puesto que se basa en
operadores de forma. Pero la definición original hizo de K un invariante
isométrico, de rrw.ncrrr que e;; plausible busc:tr en la demostración del
theorema egregium (sobre todo en el corolario 2.3 del capítulo Yl) una
generalización que resulte satisfactoria.
t El término conforme, según se entiende en general, suele incluir la conservación de la orientación.
LA CURVATURA GAUSSIANA
357
2.1 TEOREMA. En una superficie geométrica M hay una función única
]{ ele valores reales con b propiedad ele que, en cualquier campo de sistemas
de referencia en Jf, la srgunda ecuación estructural
se cumpk. K se llama curuatura gausjiana de Af.
Demostración. P:ua cada campo de sistemas de referencia E,, J;;" existe
(por las fórmulas de b=tses del kma 2.1 del capítulo Yl) una funci(m Cmica
f{ tal que
Pero tal vez hubiera otro campo de sistcwas de referencia E 1 , Ee que a
priori tuviese una función K dift'rcnte, tal que
Lo que tenemos que exhibir es que hay consistencia: donde se traslapan
los dominios de estos campos de sistemas de rderencia, allí K = N. Puc<>to
que esos dominios cubren totalmente a 1H (ejercicio 3 de la sección 1),
tC'ndremos. entonces, una sola función K en ,H con la propiedad que se ha
pedido. Esta consistencia se desprende inmediatamente del lema 1:L Consideremos primeramente el caso en que los campos ele sistemas de referenci:-t
tienen la misma orientación, ele manera que úi 12 = 01 12 + rlrp. En consecuencia. d!0 12 = dw 12 , porque rF = O. Pero, entonces,
Y, puesto que
O,
1\
O"
llegamos a la conclusión ele que
K.=K.
Cuando las orientaciones son opuestas, obtenemos d<0 12
conclusión K = K es la misma, debido a que
- d,,l,z, pero la
1
Como ya hicimos notar zmtes, el corolario 2.3 del capítulo Vi nos enseila que e'ta definición general ele la curyatura gaus,iana concuercb con
la clcfinición K = clct S cuando Nl es superficie en E'. La demostración
ele la im·ariancia isométrica que obtuvimos allí es ele carácter cnterznnentc
intrím,eco, y su validez, por lo tanto, 'e extiende a bs superficies geométricas arbitrarias.
La curvatura gaussiana es la propiedad central de una superficie geo·
métrica lvf; influye --y, a H'\TS, dccisiYmucJJtc- - en muchas eL las propic-
358
LA GEO:VIETRÍA DE RIEMANN
dadcs más importantes de Af. En la sección 6, t::xaminaremos la influencia
de la curvatura en las gcod~sicas y, en b sección 8, su influencia en la
topología de lvf.
En rc:~umidas cuentas: las investigaciones geométricas que se hacen en
términos de un campo de sistemas ele referencia E 1 , E~ se ven dominadas
por sus ccuac10ncs estructurales
Las pnmeras ccuacwnes estructurales definen, en realidad, la forma de
conexión
de ese campo de sistemas de referencia, mientras que la segunda ecuación
estructural define la curvatura gaussiana K de la superficie geométrica
(que es independiente ele la elección del campo ele sistemas ele referencia) .
Ya se ha visto claramente en el capítulo VI, sección 6, la manera en que
"''" y [( se calculan explícitamente a partir ele estas definiciones implícitas.
2.2
EJEMPLO.
La curvatura gaussiana
1) El plano euclidiano E 2 • Si nos valemos del campo natural ele sistemas ele referencia U 1 , U", entonces las 1-formas duales serán simplemente
G1 = du, 0 2 = dv. Puesto que d() 1 = d0 2 = O, la forma idénticamente cero
<o 1 ~ = O satisface las primeras ecuaciones estructurales y, en consecuencia,
es la forma ele conexión ele U 1 , U 2 • Pero, entonces, dw 12 = O, ele manera
que K = O. El plano euclidiano es llano. Esto no nos sorprende, pues E 2
es isométrico a un plano de E 3 , en el que ya sabemos que K = O debido
a la anubción ele todos los operadores de forma.
2) El plano, con el producto interior conforme
v •w
V o W
= g{p) 2
(Véase el inciso (2) del ejemplo 1.3).
El campo natural euclidiano de sistemas ele referencia U1, U 2 ya no
es un campo de sistemas ele referencia en relación con el nucYo producto
interior. U 1 y U 2 siguen siendo ortogonales, pero
Por lo tanto, gU 1 , gU 2 es un campo de sistemas de rdcrcncia. Es fácil
concluir que sus 1-formas ~uales son
LA CURVATURA GAUSSIANA
a
b
Para determinar la fonna de conexión
el y g2·
d(}l
=
dv
= --
(}2
g
359
d
d0 2 = d
w 10 ,
empezamos por diferenciar
G)
GJ
!\ du
!\ dv.
Aquí, d(l/g) = -dgjg 2 y dg = gudu
dv dv = O, encontramos que
+ gvdv.
Grancias a que dudu =
(*)
Al comparar esto con las pnmeras ecuaciones estructurales, nos damos
cuenta de que
1
w12
= - (gv du - gu dv)
g
debido a que, por (":f), esta forma <•lu satisface las primeras ecuaoones
estructurales; por la cuestión de unicidad, no le queda sino ser la fonna
ele com·xión.
Para obtener la curvatura, diferenciamos una vez más.
dw 12
1
= d (- )
g
1\ (gv du- [;u dv)
+
g
(grv du du - g," du dv).
De lo anterior, sabemos que
y que du = g0 1 , dv = g0 2 • Al tomar esto en cuenta, mediante cálculos
sencillos llegamos a
Por tanto, según la segunda ecuación estructural, concluimos que
K=g
El producto intnior inducido que explicamos en las páginas 353-354 se
puede aplicar en otras situ¡tciones. Por ejemplo, supongamos que F: 1\1 ~N
360
LA GEOMETRÍA DE RIEMANN
es un difeomorfismo de superficies (capítulo IV, sección 5) y que N es
una superficie geométrica. Entonces el producto interior inducido
V o
w
=
F* (V) o F., ( w)
ele vectores tangentes a ,\1 hace de 111 una superficie geométrica, y, de F,
una isometría. Podríamos llamar a JJ "modelo nuevo'' ele ,y: no nos importe cuán diferentes sean sus aspectos, pues son geométricamenic idénticas.
Figura 7.3
2.3
EJE!IIPLO
1) La esfera estereográfica. En el ejemplo 5.5 del capítulo IV demostramos que la proyección estereográfica P es un difeomorfismo ele la
esfera agujerada :So sobre el plano euclidiano E 2 . Consideremos a continuación a ~o corno simple superficie, mientras que E 2 será superficie geométrica, con el producto escalar habitual. Por lo tanto, el producto interior
inducido hace de :So una superficie geométrica que es isométrica a E 2 y,
en consecuencia, llana. Si nos parece que ~o es redonda, es porque la vemos
ron ojos euclidianos; es decir, suponemos erróneamente que tiene el producto escalar ele E 3 , como en el capítulo V.
2) Fl ¡;!ano estereográfico. Aquí vamos a invertir el procedimiento
de ( 1). Comidcremos a :So con su estructura geométrica habitual como
superficie en E\ y sea E 2 una simple superficie.
La inwrsa p--l: E2 --¿ :So de una proyección estereográfica es también
clifcornorfismo. El producto interior (o) inducido por Jq en E 2 hace de E 2
superficie geométrica (el plano estereográfico) que es isométrica a :So, de
manera que tiene curvatura K = + l.
Examinemos más estrechamente este nuevo plano Pstereográfico. En
todo lo que sigue, el punto ( •) denotará, romo acostumbramos, el producto
punto, ya sea de E" o de E3 .
Si v y w son vectores tangentes a E 2 en q = P ( p), sean v y
los
(micos vecton~:; tangentes a :So en p con la propiecbd de que P* ( v) = v,
/':{\\') = w (figura 7.3). Ahora bien, de acuerdo con el ejercicio 14 de b
sección 4 cld capítulo VI, sabemos que
w
361
LA CURVATURA GAUSSIANA
v•w
= P,(v) • P,,(w) = ( 1 +
11
~wr
v•w.
vy
Pero (P- 1 ) transforma a v y w dP. nue\·o en
w, de manera que encontramos, con respecto al producto interior inducido ele E~, que
Concluimos inmediatamente que este producto interior es del tipo conforme que explicábamos en el ejemplo 1.3, con
Figura 7.4
Con el fin ele visualizar este "pbno" desusado, podemos imaginar que
las reglas de medir se vuelven más largas a medida que nos alejamos del
origen. Puesto que P es ahora una isometría. la distancia intrínseca desele p hasta q (en la figura 7.4) es exactamente igual a la distancia entre
lh y q.,.. También, las circunferencias u~ + v" = r, en las que r es muy
grande, tienen en realidad una longitud estereográfica de arco muy pequeiía, puesto que corresponden (bajo la isomctría 1') a circunferencias
pequeñas alrededor del polo norte en :$ 0 •
2.4 EJEMPLO. El plano hiperbólico. Experimentemos con un cambio
ele signo en el producto interior estereográfico de antes, y pongamos
g
=
1
4
>
Puesto que es necesano que g
O, solamente se aplica este jJroducto
inierior hijJerbólico vow = (1/g~)v•w en el disco u 2 + v 2
4 ele radio 2
e-n el plano. La superficie geométrica que resulta se llama jJlano hiperbóliro H.
<
362
LA GEOMETRÍA DE RIEMANN
En este caso,
Y
=
guu
gvv
-1
2 '
=
de manera que los cálculos generales del ejemplo 2.2 nos hacen ver que
1
w1c
=-;:¡- (u dv - v du)
~g
y que el plano hiperbólico tiene curvatura gaussiana constante K
=
-l.
A medida que un punto (u> v) se aproxima al borde de H, es decir, la
circunferencia u + v = 4 ( ¡ que no es parte de H!), g (u, v) se aproxima
a cero. Por tanto, en el lenguaje que empleamos antes, diríamos que las
reglas de medir se encogerán cuando se aproximen al borde, ele manera
que H resulta ser mucho mayor ele lo que nuestra intuición euclidiana
nos podría sugerir. Por ejemplo, para un valor constante de {}, calculemos
la función ele longitud de arco s(t) del segmento ele recta euclidiano
o< t < 2,
a(t) = (t cos {}, t sen{}),
que va desde el origen hasta casi el borde. Aquí a'
manera que a' o a' = 1/g(a) 2 • Pero
t2
g(a(t)) = 1
=
( cos
{}, sen{}), de
4'
de manera que a tiene la rapidez hiperbólica
11
a' ( t)
1
11
g(a)
(l:..._ti/4).
Por tanto,
s(t) =
dt
t
J() 1 -
t2
14
= 2 tanh-1
t
2
2+t
= log ··--.
2- t
Es así como, cuando t se aproxima a cero, la longitud de arco s(t)
desde el origen ,a(O) hasta a(t) tiende a infinito. Este segmento «corto"
tiene> en realidad> la longitud hiperbólica infinita. Desarrollaremos más
adelante otras propiedades del plano hiperbólico. Y veremos que es él -y
no la trompeta (ejemplo 6.6 del capítulo V)- lo que constituyé la verdadera analogía de la esfera para la curvatura constante y negativa.
2.5 EJEMPLO. Un toro llano. Sea T un toro de revolución considerado como simple superficie, y sea x: E 2 - T su parametrización habitual
(ejemplo 2.6 del capítulo IV). A continuación, daremos a T estructura
geométrica al definir
Xu oxu =
1,
Xu OXv =
Ü,
Xv o Xv
= l.
LA CURVATURA GAUSSIANA
363
Se verifica con facilidad que esto nos define -sin ambigüedad- un producto interior en cada plano tangente ele T.
Puesto que Jü (U i) = X u y x,, (U") = Xr, vemos inmeclia tamcn te que
x es isometría local del plano euclidiano E" sobre la superficie geométrica T. Puesto que las isometrÍ:ls locales también conscrvan la cun·atura
gaussiana, T es llano. Por tanto, su estructura geométrica es diferente del
toro habitual en E", CU)'Zl cun·atura es YZlriabk.
Puesto que este toro T es compacto y llano, el teorema 3.5 del capítulo VI nos enseña que nunca lo podremos encontrar en E-1 • Esto significa
ele manera explícita que no existe ninguna superficie M en E 3 que sea
isométrica a T, pues, de serlo, ll1 también sería compacta y llana; sin
embargo, esto lo prohíbe el teorema. Aquí tenemos la prueba de que la
cbse de las superficies geométricas es más rica que la de las superficies
en E 3 • Esperamos que al estudiar este capítulo, el lector se conyenza ele
que las superficies geométricas son el objeto natural ele estudio, y que las
superficies en E 3 -aunque parecen, a primera vista, ser muy acordes con
nuestra intuición- no son más que un cao;o especial e interesante.
No debemos concluir del ejemplo anterior (1ue toda superficie puede
recibir estructura geométrica lbna. Aquí intervienen algunas sutilezas ele
carácter topológico, como veremos en la sección 8.
2.6 CoMENTARIO. Hasta aquí, hemos reservado la notación ele punto (·) para el producto escalar del espacio euclidiano, y usamos un círculo
pequeño (o) para hacer hincapié en la generalidad del producto interior
de una superficie geométrica arbitraria. De aquí en adelante, usaremos el
punto para todos los productos interiores, y sólo volveremos a emplear
el convenio anterior cuando, como sucede en el ejemplo 2.4, aparezcan
los dos en el mismo contexto.
EJERCICIOS
l. Dedúzcanse las formas duales y la forma ele conexwn '''e = du /u para
el c:cmpo ele sistemas ele referencia vU 1 , vU~ en el scmiplano de Poincaré (ejercicio 2 de VII.l) y hágase ver que esta superficie tiene curvatura constante y negativa K = -l.
2. Con respecto a la estructura geométrica conforme ele la totalidad del
plano, en la que
g = cosh ( uv),
calcúlense las formas duales y la forma de conexión del campo ele sistemas de referencia gU 1 ,. gU~ y dedúzcase la curvatura gaussiana K.
LA GEOMETRÍA DE RIEMANN
3. Encuéntrese el área A del disco u" + v" < r" en el plano hiperbólico.
(Indicación: Encuéntrense E, F,
p:ua un 2-segmcnto
e
x(u, v) = (u cos 1', u srn ¡•) .)
¿Qué área tiene la totalidad del plano hiperbólico?
4. El jJlano hiperbólico de pseudorradio r 'e obtiene al a\1crar la función g del ejemplo 2.4 para tener g = 1 + (11" + z·" .1 ; +r". ~ncuén­
trcsc su curvatura gaussiana.
5. Encuéntrese el área del toro llano del ejemplo 2.5. Modifíquese la
definición de manera que se produzca Ull toro llano de área arbitraria
A> O.
6. Verifíquese la existencia de una estructura geomctnca en el plano proyecti\·o con la propiedad de que el mapeo natural P: ~---¿:S es isometría local. Demuéstrese que esta superficie geométrica ~ no se puede
encontrar en _E 3 . (Tenemos el mismo resultado cuando ::S es una t'sfer::J
de r::1dio r y :S se convierte en el jJlano jnoyertivo de radio r.)
7. Hág::1se ver que el pbno, provisto ele rstructur::J geométrica conforme,
tal que g = sech u, es isométrico a un helicoide.
8. El mapeo identidad x(u, v) = (u,<)) de E" es una carta en la que
x, = u1, Xv = U2. Por tanto, si (o) es una estructura geométrica en
el plano, en esta carta se tiene que
a) Dadas cualesquiera funciones difercnciables E. F y e en el plano,
tales que E> O, G >O, Ee - P > O, verifíquese que hay una
estruetur::1 geométrica en el plano que corresponde, como antes, a
estas funciones.
b) Ilágase ver que el método que se usó en el ejemplo 2.2 es un caso
especial del que \·imm en el capítulo VI. sección 6, y drclúzcasc
la fórmula dt: K en el eiemplo 2.2 del lema 6.3 del capítulo VI.
(Indicación: En a 1, clcfínase
3
La derivada covariante
La derivada coyariante \7 d<C E·' (c::JpÍtulo IJ, sección 5) forma Fute
esencial ele la geometría euclidiana. A nosotJw; nos sirYió, por ejemplo,
para ddinir el opnador ele f.orma de un::1 superficie en E\ y, con una
LA DERIY.\DA COV ARIA NTE
365
modific:ación (capítulo II, sección 2), para definir la aceleración de una curva en E". En esta sección, nTemos que cada sujJerficie geométrica tiene
su jno j!io concejJto de derivada coz•ariantr.
Como teníamos en el espacio euclidiano, una derivada covariante 'V
en una superficie geométrica JI :1signará a cada par de campos vectoriales
V, TV en AI un nue\·o campo vectorial 'V rVV, y --claro está-. requeriremos que tenga las propiecladt's habituales leibnizniana y de linealidad
(corolario 5.4 del capítulo II). Desde el punto ele vista intuiti\·o, el valor
ele 'V v W en un punto p será la tasa de cambio de W en la dirección V ( p) .
Por lo tanto, si la forma de conexión "' 1 " de un campo ele sistemas de referencia E 1 , E" conscrYa su sentido geométrico habitual (el de medir las
tasas a las que E 1 da vuelta hacia E 2 ) , también hemos de pedir que
Estas condiciones determinan completamente a 'V v TV para cualt'squiera
campos vectoriales V y W:
3.1 LEl\IA. Supongamos que 'V es una derivada covariantc en Af con
las propiedades habituales lcibnizniana y de linealidad, y también tal que (')
se cumple en un campo de sistemas de referencia E,, F". Entonces, 'V se
gobierna por las auaciorzPs de cOJ/I'YÍr5n
'VvE1 = w1z(V)E 2
'VvE" = w21(V)E1.
Además, si W
=
fE +fE
1
1
2
2
es un campo vectorial arbitrario, entonces
Esta última expresión se llama Jármula de la derivada covariante. Observemos que V[/ 1 ] y V[f,] sobnwnte nos dicen la manera en que W cambia
en relación con E,, L,: el efecto de los términos en que interYiencn las
formas de conexión comiste en compcmar la manera en que el mismo
Er, F, se mun-c en rolaci(cn, por lo cual tenemos que 'VvvV es una rapidez
de variación "absoluta".
Demostración. Puesto que E 1 • E 2 = O, obtenemos, gracias a una propiedad leibnizniana de 'V, que
En consecuencia, por (*),
366
LA GEOMETRÍA DE RIEMANN
Pero Ei • Ei = 1, de manera que la misma propiedad leibnizniana nos da
2\lFEi • Ei =O para i = 1, 2. Por medio de esta información, deducimos
las ecuaciones de conexión por el desarrollo orto normal de "V1·E1 v \l rE~.
Por último, aplicamos las propiedades de \7 que hemos supuesto, para
concluir que
\lrW
+ [cEc) = "Vdf1E,) + \ld["F"}
= V[ft]El + f1 \J¡.E¡ + V[fJEc + f" \JyE~.
=
\7,(/1E1
Al substituir las ecuacwnes de conexión obtf'nemos la fórmula ele la derivada covariante.
Este lema nos enseña a definir la c!eri\·acla covariantc ele JI. Observemos que aquí el orden ele cosao es el in\Trso del que teníamos en el
capítulo II. Allí empleamos la derivada coYariante para definir Les formas
ele conexión; aquí usaremos la forma de conexión w 1 ~ para dC'finir b cleriYada covariante de J1.
3.2 TEOREMA. En una superficie geométrica "H, hay una y sólo t!DZI
derivada covariante \7 que posee lZ~s propiedades h;1bitua!C's ele linealidad
y leibnizniana (corolario 5.4 del capítulo II) y que satisface la ecuación
(*) para todo campo de sistemas ele referencia en "H.
Demostración. El lema anterior nos enseña que no hay más de una
de esas derivadas covariantes, puesto que \7 F ~V se determina mediante
una fórmula en que no interviene \J. De manera que lo que debemos
demostrar es que una derivada covariante \7 así existe en realidad. Dividiremos la demostración en dos partes y suprimiremos algunos de los
detalles.
A. Definición local. Con respecto a un campo fijo ele sistemas ele referencia E 1 , E 2 en una región (), aplicamos la fórmula del lema 3.1 como
la definición de \7 vW. Con cálculos de rutina verificarnos que \l es lineal
y lcibnizniana, y, cuando ~V es E 1 , obtenemos
en consecuencia, ("') se cumple.
B. Conli,tcncza. Con respecto a dos carnpos diferentes_ de sistemas de
rcfcrcnci <l. ¿serán acordes las definiciones locales? Si \7 v TV se deriYa
de fl 1 , lf2 en 6, debemos verificar que \7 v W =
1· U' en la porción traslapada ele () y (). Pues, de ser esto vúliclo, tendremos una sola dnivada
covariante en la totalidad de i1f. Gracias a h propiedad lineal y leibnizmana, es mfic:iente Yerificar que
V
( 1)
367
LA DERIVADA COVARIANTE
1\_pli~aremos el lema
1.4, y supondremos, por simplicidad, que E 1, E 2 y
E1, Ez tienen la misma orientación. Al aplicar \7 v a la ecuación
E1 = cos {} E1
+ sen {} E2,
la fórmula de la derivada covariante nos dice que
+ senD"'"'(V)}E, +
1.4, w12 = w 12 + d{}. Si,
\i'vE, = {V[codt]
{V[senD]
+
cosil>o>dV)}Ez. (2)
Por el lema
en (2), tomamos t:n cuenta que
= w1 2 - d{}, se producen algunas cancelaciones favorables, y nos quedamos con
w 12
(3)
Podemos deducir ele la misma manera que \7 rR 2
=
\7 1E 2
él
E e = -sen {} E 1 + cos {f E 2 •
partir de
1
3.3 EJEMPLO. La derivada couariantc de E 2 • El campo natural de
sistemas de referencia U1, U 2 tiene o1 12 = O. Por lo tanto, en un campo vectorial
la fórmula de la derivada covariante (lema 3.1) se reduce a
Este es precisamente el lema 5.2 del capítulo II (si lo aplicamos a E 2
en lugar de a E 3 ), ele manera que nuestra definición abstracta de derivada
covariantc produce los resultados correctos en el plano euclidiano.
La derivada covariante \7 de una superficie geométrica M se puede
modificar ele manera que se la aplique a un campo vectorial Y en una
curua a en }\1. (Como es habitual, para cad;¡ t, Y(t) es un vector tangente
a A1 en a ( t), corno vemos en la figura 7 .6.)
Si E 1, E 2 es campo \·ectorial en una región de A1 que contiene a a,
podemos poner
o, si lo expresamos con mayor brevedad,
)i,:hn sin n;r;'n precisión, queremos que la derivada covariantc Y' ele Y
se L 'Vo·Y. Por tai'to, la fórmula ele la derivada covariante (lema 3.1) nos
inclic:: que tenemos que definir
1
368
LA GEOMETRÍA DE RIEMANN
La comprobación de que esta idea de derivada covariante es independiente
ele la manera en que se elige el campo ele sistemas de referencia, así como de
que tiene las mismas propiedades lineal y leibnizniana del caso euclidiano,
se reduce a una cuestión ele rutina. También, como veí:unos en el capítulo II, sección 2, puesto que la yelocidad a' de una curva en 1\f es campo
vectorial en M, podremos tomar su derivada covariante para obtener la
aceleración a" de a.
Figura 7.5
Tal vez nos convenga pensar de nuevo en el caso de una superficie Af
en E''. Si V y W son campos vectoriales tangentes en "H, hay dos maneras
ele tornar las derivadas covariantes: una se desprende de la geometría intrínseca que le corresponde a j f como superficie geométrica, la otra es
la derivada covariante euclidiana ele E'3• Las dos cleriYadas son, en general,
clikrentes, pero existe entre ambas una relación sencilla.
3.4 LEMA. Sean V y vV campos vectoriales tangentes en una superficie M en E·' (figura 7.5) . Si \7 es la derivada covariante ele M como
superficie geométrica y \7 es la derivada covariante euclidiana, entonces
\7 y W es la componente de .¿7 y W tangente a lvf.
Demostración. Supongamos, en primer lugar, que fY es uno ele los
campos \Tctoriaks E 1 , E~ ele un campo ;:¡c\aptado ele sistemas ele réferencia
~',, t-':c, 1:·,. Por las ecuaciones de conexión auclidianas (teorema 7.2 del
capíiulo II) terwmos que
VvE1 =
¿; w¡¡(V)E¡ =
w12(V)Ez
+ w13(V)E3.
j=l
Pero las ecuaciones ele conexión (lema 3.1) de J.1 nos dicen que
LA DERIVADA COVARIANTE
369
Por lo tanto VvE 1 es \lvE1 más un campo vectorial normal a M. En otras
palabras, \lvE1 es (en cada punto) la componente de VvE 1 tangente a
M. Este mismo resultado, por supuesto, se verifica en E 2 •
En el caso general, como W es tangente a AJ, podemos escribir
Entonces, el resultado que buscamos se desprende inmediatamente del caso
especial que vimos primero, puesto que las dos derivadas covariantcs son
lineales y leibniznianas.
1
Es así como hemos venido empleando la derivada covariante intrínseca
de M C E 3 en todo lo que hemos estudiado, aunque no le dimos el reconocimiento formal. Ocurre siempre que tomemos la componente tangencial
de la derivada covariante euclidiana.
Sólo las propiedades fundamentales de las derivadas covariantes son
comunes a todas las superficies geométricas. En particular, el concepto de
jJaralelismo relacionado con ellas (que se debe a Levi Civita) no se comporta siempre de la misrna manera que en el caso euclidiano. Una buena
parte del carácter individual de la geometría euclidiana se apoya en el
hecho de que un vector tangente vl' a --concretamente-- E 2 se puede desplazar a un vector tangente paralelo Vq en otro punto q. Como veremos,
este fenómeno de "paralelismo a distancia" no se obtiene en una superficie
geométrica arbitraria. Sin embargo, siempre es posible definir el paralelismo en un campo vectorial Y en una curva. En el espacio euclidiano,
esto significa que Y tiene coeficientes constantes en relación con el campo
natural de sistemas de referencia, pero la caracterización infinitesimal
Y' = O tiene, en general, sentido.
3.5 DEFINICIÓN. Un campo vectorial Y en una curva a de una superficie geom(.tric<l M será paralelo cuando se anule su derivada covariante:
Y'= O.
V(O)
Figura 7.6
370
LA GEOMETRÍA DE RIEMANN
Así como en el caso euclidiano, un campo vectorial paralelo tiene
longitud constante, pues 1! Y W= Y • Y, y (Y • Y)'= 2Y • Y'= O.
3.6 LEMA. Sea a una curva en una superficie geométrica Jf, y sea v
un vector tangente en, por ejemplo p = a (O). Entonces, hay un campo
vectorial paralelo único V en a tal que V (O) = v (figura 7.6) .
Demostrúción. Podemos suponer que a descansa por completo en el
dominio de un campo ele sistemas de referencia E 1 , Ee en A1. (Si esto no
se verificase, podríamos partir a a en segmentos para los que se cumpliera.)
El campo vectorial V debe satisfacer las condiciones
V'= O
V(O)
Corno V tiene la longitud constante
11
=
V
v.
11 =
( 1)
e, podernos poner
+ e sen 9 Ec
V = ecos rp E 1
(2)
donde rp es el ángulo desde E 1 hasta V. Por tanto, la fórmula de la derivada
covariante nos dice que
V' = e { -sen rp rp'
+
+ sen rp "'"1 (a') } E1
e {cos rp rp'
+
cos rp wlz(a')} E2
Vernos inmediatamente que ( 1) equivale a
donde rp(O) es el ángulo desde E1(p) hasta V(O) = v. Sólo hay una función así, a saber,
rp(t)
= rp(O) -
s:
w 12
(a') dt
Al substituir esta función rp en (2), tenernos definido el campo vectorial
V que buscábamos.
1
En la situación que enuncia el lema 3.6, decimos, para cada t, que el
vector V ( t) en a ( t) lo obtenernos de v en p == a (O) por una traslación
paralela a lo largo de a.
En E 2 , la traslación paralela ele un vector tangente Vv a lo largo de
un segmento ele curva desde p hasta q produce simplemente el resultado
ele paralelismo a distancia v q, que resulta ser, ele esta manera, completamente independiente de la manera en que elegimos la curva. Pero en
una superficie geométrica arbitraria A1, las curvas diferentes que van ele
p a q producirán a menudo vectores diferentes en q. Esto equivale a decir
que: si un vector v en p se traslada paralelamente por una curva cerrada
LA DERIVADA COVARIANTE
371
a (que empieza y termina en p) el resultado v* no será necesariamente
igual que v. Este fenómeno se llama holonomía. Si se fija un campo particular de sistemas de referencia en la curya a, entonces la demostración
del lema 3.6 nos enseña que la traslación paralela desde a (a) = p h;:,sta
a ( b) = p a lo largo ele a imprime a todos los \Tctores una rotación que
recorre el mismo ángulo 1' ( b) - 'P (a), puesto que rp' es igual en todos los
campos vectoriales paralelos. Decimos que éste es el rínr.;ulo de • holonomía
,P,, ele a. (Podemos h;wer caso omiso ele los múltiplos ele 2,.. en .pn, puesto
que no afectan la determinación de v'''.)
3.7 EJE:\IPLO. La holonomía en una esfera :S de radio r. Supongamos
que la cmYa cerrada a p;uametriza una cirnmfercncia en :S. No se pierde
generaliclacl al suponer que a es una circunferencia de latitud y podemos
suponer concretamente que es la curva u-parámetro
a(u) = x(u, Vn),
donde x es la carta geográfica en :S (figura 7.7). De acuerdo con el
ejemplo 6.2 del e<lpitulo VI, el campo asociado de sistemas ele referencia
E1, Ec de x tiene w1c = sen v du. A continuación, la demostración del
lema 3.6 nos enseña que todo c:1mpo vectorial paralelo en a tiene el ángulo
'P (que se mide a partir de Ei) para el que se verifica que <p' = -'''le (a').
De esto se desprende que <p' tiPne valor constante igual a -sen v0 en a. Por
lo tanto, el ángulo de holonomia ,Pa de a es
<p(2") - <p(O)
= -2r. sen V 0
Hay que notar que, en el ecuador, v = O, y sólo en ese lugar, se tiene
que un vector v vuelve a sí mismo después de la traslación paralela alrededor de a. Cuando v 0 se acerca a r. /2, entonces a es una circunferencia
pequeña alrededor del polo norte de 2;. Puesto que <p' tiene un valor
próximo a -1, el campo vectorial paralelo V gira rápidamente en rota-
Figura 7,7
ción con respecto a E1, E 2 • Pero el [mgulo de holonomía se aproxima a
-27:, de manera que la diferencia real entre v = V(O) y v''' = V(2") es,
como era de esperarst>, bastante pcqueíía.
372
LA GEOMETRÍA DE RIEMANN
La curvatura gaussiana tiene una influencia fuerte en la holonomía,
como se ve en el ejercicio 5.
Con respecto a una carta x dentro de una superficie geométrica arbitraria M usaremos inevitablemente la notación Xuu para la derivada
covariante de Xu a lo largo de las curvas 11-parúmetro de x; tenemos los
significados correspondientes para Xuv, Xvu y Xvv· Por lo tanto• cuando Af
es superficie en E 3 , hemos de tener una notación nueva, que serú x'"'' ... ,
para los objetos análogos que definimos en el capítulo V, sección 4. Allí
usábamos la derivada covariante de E 3 , mientras que aquí se trata ele la
derivada covariante de la misma A1. En el caso intrínseco, también es
cierto que Xuv = Xvu, pero la demostración no es, en absoluto, obvia
(ejercicio 9).
EJERCICIOS
1. En el st>miplano de Poincaré, sea a la curva definida en el ejcn'JCJO
2 de la sección l. Exprésense su velocielad y su acder:1ción en términos
del campo ele :-istn11as de rdl'l'C'IH:ia
(1 nrlicación: Son coline:Jies.)
2. Sea
f3
la curva
j3(t)
=
(ct, st), t >O,
del semiplano de Poincaré, donde e y s son constantes tales r¡ue
c 2 + s" = l. (Por lo tanto, f3 es una recta euclidiana que pasa por
el origen,.) Exprésense la velocidad y la aceleración ele f3 en términos
del campo de sist¡cmas ele referencia que usamos en el ejercicio l.
3. Si V y W son campos ,·ectoriales tangentes en una superficie en E 3
refínese la demostración del lema 3.4 para verificar que
V: rr =
V'vW
+ S(V) ·Hl U,
donde S es el operador de forma que se deriva ele U = +E.,. En
consecuencia, si a es una curva en Af,
(;/' = a"
+ S (.a') •,n:' r·.
4. Demuéstrese que, en la esfera 2:, la curva a del ejemplo 3. 7 tiene
aceleración (intrínseca) a" = r cos u0 sen v 0 E~. Calcúlese su aceleración euclidiana, y hágase ver que a" es la componente tangente a 2;.
373
LA DERIVADA COVARIANTE
5. Sea a una curva cerrada en una superficie grométrica ltf.
a) Si a es homotópica a una constante vía x (ejercicio 12 de lV.6),
wrifíquese que el ángulo de holonomía ele a l'S (fx K dJ1. (Supongamos c¡uc x(R) queda en el dominio ele un campo de sistemas
de referencia.) Cuando x es cuasicarta, esta integral es la curvatura total de la región x (R) .
b) Calcúlese el ángulo de holonomía del ejemplo 3. 7 con estt! método.
6. Sea V un campo vectorial paralelo en una curva a en }vf, y sea TV
un campo vectorial en a ele longitud constante. Y crifíquese que TV es
paralelo si y sólo si el ángulo que forman V y W es constante.
7. Hágase ver que las isometrías conservan las derivadas covariantes en el
sentido siguiente: si Y es campo vectorial en una curva en lt1 y si
F: M__,. M es isometría, entonces
F,. (Y') = Y', donde Y rs el campo vectorial F. (Y) en
a
= F (a) en M.
(Simplifíquense las cosas mediante la suposición ele que se puede
expresar Y como Y = fF; 1 , donde E 1 , E 2 es un campo de sistemas de
referencia en fiv1.)
Este resultado es análogo al euclidiano (corolario 4.1 del capítulo
lii). El caso general se estudia en el ejercicio 8.
8. Demuéstrese que una isometría F: 1\f ---J> M conserva las derivadas
covariantes \7 y V'. De manera explícita, en cada campo vectorial
X en 1\f, sea X el campo vrctorial transferido en Xt: X(F(p)) =
F.,,(X(p)) para cada punto ele 1\1. A continuación, hágase ver que
\i'i"TV = V' rW. (Indicación: Si f; = TV•Ei y (; = W·l~;, aplíqurse el
ejerc1c1o 8 de la sección 5 del capítulo IY para demostrar que
V[f;] en pes igual a V[f;] en F(p).)
9. Si x es carta ortogonal en una superficie geométrica 11.1, hágase ver que
(rkri\·:•cL\s intrínsecas). (Indicación: En el cam¡;o asociado de sistemas
de rdercncia, calcúlese
•
Xu
Xn
yE_==x·--vu VEO
A continuación, mediante la fórmula. de "' 1 " que dimos en el capÍlulo VI, sección 6, demuéstrese que
(,(E) V
yO
yFG
374
LA GEOMETRÍA DE RIEMANN
Encuéntrese una demostración más fácil para el caso en que "~1 es
superficie en E 3 .
1O. (Continuación). Demuéstrese que y 11 , = Yru cn una carta arbitraria
y. ( [ndicación: Existe una carta ortogonal x tal que x = Y(u, z.·).)
11. Si existe un campo vectorial no nulo TV en 1\f tal que 'V ¡·W = O
para todo V, demuéstrese que A1 es llana. Encuéntrese ese campo
vectorial en un cilindro de E 3 •
4
Las geodésicas
Las geodésicas en una superficie geométrica arbitraria vienen a generalizar
las líneas rectas de la geometría euclidiana. ITcmcs visto que una recta
a(t) = p + tq se caracteriza infinitesimalmcnte por la anulación de la
aceleración; pcr tanto, tenemos la
4.1 DI:FmrcrÓN. Una curva a en una superficie geométrica AI es geodésica de M cuando su aceleración es cero; a" = O.
Dicho de otro modo, la velocidad a' de una geodésica es paralela: las
geodésicas no dan Yuelta nuuca. Recordemos que el par::dcbmo de CY impEc1
que ]; CY ¡ es constante: por ello, las gPodésicas tienen rapidez cnnstanlc.
Puesto que las isometrías conservan la aceleración (ejercicio 7 de la
sección 3), tenemos que las geodésicas son inYariantcs isométricas. (La
demostración directa aparece en el ejercicio 1 de la sección:), capítulo VI)·
De hecho, si F: Af----'> N es meramente isomctría local, cntonctes F transforrna cada geodésica ac de 1\1 en una geodésica F (o:) de N, pues F es
localmente isomctría, como lo explicamos en el capítulo VI, sección 4.
La definición general ele geodésicas que din~os antes concuerda con la
5.7 del capítulo V, cuando lvf es superficie en E\ pues podemos deducir
del lema 3.4 que la aceleración intrínseca de una curva a en A4 C E" es
la componente tangente a M ele su aceleración euclidiana. Por tanto, la
primera será cero si y sólo si la segunda es normal a 1\1.
Supongamos que a: I ~ A1 es una curva en una superficie geométrica
arbitraria A1 y que E 1 , E~ es campo de sistemas ele referencia en 1\1. En
toda esta sección, emplearemos la notación
1
1
1
y
a"
para la velocidad y la aceleración ele a. Gracias a la sección 3, sabemos
que estas com¡wnentes ele la aceleración son
375
LAS GEODÉSICAS
y que son funciones en el intervalo I que toman valores reales. Nuestro
criterio principal para determinar si a es geodésica consiste, por tanto, en
que A 1 = A 2 = O. Por medio de coordenadas ortogonales expresaremos a
continuación estas ecuaciones de manera que den más información.
4.2 TEOREMA. Sea x una carta ortogonal de coordenadas en una superficie geométrica M. U na curva a ( t) = x (a 1 ( t) , a 2 ( t) ) es ge,pdésica de
M si y sólo si
De aquí en adelante, hablaremos de estas ecuaciones como A 1 = O
y A" = O. Adviértase que son simétricas en el sentido ele que las imTrsiones
1 ~ 2, u~ v, E~ G convierten la una en la otra. En este contexto, siem-
jne entenderemos que las funciones E, G, y sus derivadas jJarciales Eu,
E,.··· se evalúan en (a1, ae) y, en consecuencia, se convierten en funciones
en el dominio I ele a.
Demostración. La velocidad de a es a' = a/xu + ac'xv, de manera,
que, en términos del campo asociado de sistemas de referencia ele x (capítulo VI, sección 6), tenemos
Por tanto, las componentes de aceleración A 1 , A 2 que definimos antes se
con,·ierten en
A1
=
(a/
A 2 = (a2'
vE)'+
(ae'
v G) w21(a')
( 1)
vG)' + (a/ V E) w 1 z( a').
Por medio de la fórmula ele w12 del capítulo VI, sección 6, encontramos
Al tom;n- coto en cuenta ( 1), las ccu::tciones ele geodésicas "1, = A e = O
se convierten en
(3)
(a 2'
-v1 G)'
-
j Ei_vJ!Jy_ a1' 2
vG
-1-,
1 G)
v
(-
1
"a1 ' az ' = O.
376
LA GEOMETRÍA DE RIEMANN
Mediante recursos estándar del cálculo, transformamos ( 3) a la forma que
enunciamos en el teorema. No haremos más que recordar al lector que, en
un desarrollo leibnizniano como es
-.
E'
(a/ vE)'= a/' vE+ a/2vE,
la notación E abrevia E ( a 1 , a.2 )
,
de manera que
1
4.3 TEOREMA. Dado un vector tangente v a M en un punto p, hay
una geodésica única a de M con la propiedad de que
a(O) = p,
a'(O)=v.
Por tanto, las geodésicas menudean en cualquier superficie geométrica,
y cada una de ellas se determina por su posición inicial y su velocidad.
En E 2 , por ejemplo, la geodésica determinada por v en p es la recta
a(t) = p + tv.
Demostración. Sea x una carta ortogonal dentro de ;\f con p =
x ( u 0 , v0 ), y pongamos v = c 0 xu + d0 xv. Las ecuaciones de geodésicas del
teorema 4.2 tienen la forma
( 1)
Además, a satisface las condiciones iniciales enunciadas
SI
y sólo si
a/(0) = c 0
(2)
a/(0) =do.
Ahora bien, el teorema fundamental de existencia y unicidad ele lns ecuaciones diferenciales afirma que hay un intervalo 1 alrededor del O en el
que se tienen definidas funciones únicas a 1 , a 2 que satisfacen ( 1) y ( :2). Por
tanto, a = x ( a 1 , a 2 ) es la única geodésica definida en 1 con la propiedad
ele que a(O) = p, a'(O) = v.
1
Esta demostración no resulta completamente satisfactoria, puesto que
el intervalo 1 podría sn innecesariamente pequei\o. Describiremos con
brevedad una manera ele hacerlo tan grande como es posible. Se supone
que a 1 : 11 -7 Af y a;2 : 1 2 -7 ;\! son gcodésicZI~ que satisfacen bs mismas
condiciones iniciales en t = O. Por medio de b propiPCiacl de unicidad
anterior, podemos deducir que a 1 = (\ 2 en la parte que tienr'n en común
[ 1 e /.,. Si aplicamos este resultado de consistencia a tocbs las gcodésicZis
así, obtendremos un:1 sola geodésica máxima n:: 1-7 ;\! que satisfaga bs
377
LAS GEODÉSICAS
condiciones iniciales. (El intervalo I es el máximo posible.) Desde el punto
de vista intuitivo, esto no significa más que dejamos c¡ue la geodésica vaya
tan lejos como pueda.
4.4 DEFINICIÓN. Una superficie geométrica AJ es geodésicamente completa cuando toda geodésica máxima se ha definido en la totalidad de la
recta real R.
Con brevedad: las geodésicas corren para siempre. U n:c cun·a constante es trivialmente geodb,ica, pero si excluirnos este caso, toda geodésica tiene rapidez constnnte y no nula. Por tanto, la completitud geodésica
significa que todas las geodésicas (máximas) no triviales son indefinidamente largas en ambas direcciones. Por ejemplo, E" es claramente completo, y los cálculos explícitos del ejemplo 5.8 del capítulo V nos enseñan
que las esferas y los cilindros de E 3 también lo son. Con más generalidad,
todas las superficies geométricas compactas son completas, como también
lo son todas las superficies E 3 de la forma AJ: g = e (son consecuencias
del teorema 15 del capítulo 10 ele Hicks [5 ]) . Si se retira un solo punto de
una superficie completa, se destruye esta propiedad, puesto que las geodésicas que antes pasnban por el punto en cuestión tendrán que clctencrse allí.
Hay una teoría de Frenet ele curvas en una superficie geométrica "U
que es generalización de la de curvas del plano (ejercicio 8 de la sección 3
del capítulo II). Puesto que 1\1 sólo tirnc dos dimensiones, no se puede
definir la torsión. Sin embargo, cuando 1\f está orientada, se puede dar
a la curvatura un signo que tenga significado geométrico, de acuerdo con
el criterio siguiente: si (3: I---"> Af es cun·a de rapidez unitaria en una
superficie geométrica orientada, entonces T = (3' es el campo z·at orial
tangente y unitario de (3. Para obtcncr el campo vectorial normal y princijJal N, aplicnmos a T una "rotación que recorre + 90° ," y definimos
N= J(T),
donde J cs el operador de rotaci(m del ejercicio 5 de la sección 1 (figura 7.8). Entonces, la curvatura geodésica Kg de (3 es la función de valores
reales, definida en I, para la cual se culllplc la fórmula de Frenl't T' =
KgN. Por tanto, Kg no se limita a los valorcs no negativos, como teníamos
N
J(T)
/ .. ·.,'' . ·.~
;-;gura 7.8
LA GEOMETRÍA ~E RIEMANN
378
en el caso de las curvas en E 3 : Kg > O significa que T -y, en consecuencia, (3- da vuelta en la dirección positiva ele acuerdo con la orientación
de 1U, y Kg < O significa que la vuelta es negativa.
4.5 LEMA. Sea (3 una curva de rapidez unitaria en una región onentada mediante un campo de sistemas de referencia E 1 , E 2 • Si 'P es una
función angular que va de E 1 a (3' a lo largo de (3, entonces
- ds
d'P T'
Kg-
(1)12
((3')
•
Demostración. Por la definición de función angubr, (ejercicio 15 del
capítulo VI, sección 7) tenemos que
T = (3' = cos 'P E 1 + sen 'P E 2 .
Puesto que la orientación se deriva de este campo de sistemas de referencia,
](E1) = Ez
y
de manera que
N=](T) = -sen'PE1+cos'PE2 •
Por medio ele la fórmula de derivadas de la página 367), encontramos
T'
=
(3" = {-sen rp
<p'
+ {cos'P'P, +
Pero
Kg =
T'·N
+ sen
<p o1z1
COS1f·w 12
((3') }F1
((3')}E 2 .
T'·j(T), ele manera que al aplicar las fórmulas de T'
=
y J(T) obtenemos
1
K
u = ( cos"so + sen 2 'f) ( 'f +
w12
((3'))
'P, +
=
w12
1
((3').
Por ejemplo, en E 2 , el campo natural de sistemas de referencia tiene w12 = O, y '? se convierte en un ángulo habitual dependiente ele la
curva /). Por lo tanto, el resultado se reduce a Kg = drp j ds, que, en el cálculo elemental, se suele tomar como definición de curvatura.
Con respecto a una curva regubr a de rapidez arbitraria en A1, se
define el aparato de Frenet T, N, Kg -como se hizo en el capítulo II, sección 4- mediante la repararnetrización. Además, la misma deniostración
que nos sirvió para el lema 4.2 del capítulo li nos cnsclía que
a'= vT
donde v
=
11
a'
11
d"
a"= ---':' T
dt
+K
es la función de rapidez de
g
v 2N
(*)
<t.
4.6 LEMA. Una curva regular a en 1\1 es gcod(.::ica
rapidez consiémte y curvatura gcodé.<ica -~g = O.
Sl
y sólo
SI
a tiene
379
LAS GEODÉSICAS
Demostración. Puesto que v
(dvjdt) = Kg =O.
> O,
tenemos que a
,
O sr y sólo sr
1
Las ecuaciones de (*) también ensclían que a tiene curvatura geodésica de cero si y sólo si a' y a" son siemjJle colinealcs. A veces se les llama
a esas curvas también geodésicas; para que lo sean en el sentido estricto
de la definición 4.1, es suficiente rcparametrizar a a una curva •ele rapidez
constante. (Demostración: t<g no se ve afectada por la reparamctrización.)
En los contextos en que la parametrización tiene algo de importancia,
diremos que una curva en la que t<g = O es una prcgeodésica.
Los cálculos de fórmulas explícitas de las geodésicas de una superficie
geométrica dada es raras veces una tarea de ejecución fácil. Pero nuestro
objetivo en este estudio no es la recolección de fórmulas, sino examinar
el comportamiento general de las geodésicas. Antes ele seguir adelante
en la exposición, vamos a investigar un caso especial e importante en el
que se suele obtener una cantidad consiclerable de información concreta
acerca de las geodésicas sin que los cálculos sean mús que mínimos.
4.7 DEFINICIÓN. Una jJaramctrización de Clairut x: D ~ A1 es una
parametrización ortogonal para la cual E y C dependen solamente ele u,
es decir, F = O y Ev = Cv = O.
Por ejemplo, la parametrización ele Clairut.
4.8 LEMA. Si x es parametrización ele Cbirut, entonces
1) Todas las curvas u-parámetro de x son pn·gcoclésicas, y
2) Una curva v-parámetro, u = Un, es gcoclésic1 si y sólo si G, ( 11 0 '1 = O.
Demostración. En ( 1), es suficiente, gracias a un comentario anterior,
que se vea r1ue Xu y x"" son colineales. Puesto que Xu y Xv son ortogonales,
esto equivale a que
Xv"Xuu
= O.
Pero las ecuacwnes siguientes implican este resultado:
O = Ev
=
(xu"Xu)
v=
2x,¡"Xuv
De la rmsma manera, en (2), la curva v-parúmctro u = u 0 es prcgeocl(sica si y sólo si Xn· (u, Z' ·,·X u ( 11,¡, ¡·! = O. L1s ccu:1ciones siguiente'
nos enseñan que esto sucede si y sólo si C" ( u 0 ) = O.
par::1 todcJ
i'.
380
LA 3EOMETRÍA DE RIEMANN
(Recuérdese que Xuv = Xvu·) N o nos ha servido la condición Gv = O: no
tiene más fin que indicarnos que las pregeodésicas v-parámetro son, en
realidad, geodésicas, puesto que ello significa que las curvas v-parámetro
tienen rapidez constante.
1
En el caso de una superficie de revolución, este lema constituye una
demostración intrínseca de que los meridianos son geodésicas, y• de que
un paralelo, u= u 0 , es geodésica si y sólo si h'(uo) =O. (Véase el ejercicio 3 del capítulo V, sección 5.)
Gracias al lema anterior, pensaremos en una parametrización de Clairut
como un "cauce" en el que las líneas de corriente son sus geodésicas
u-parámetro, y mediremos el comportamiento ele las geodésicas arbitrarias
en relación con este cauce.
4.9 LEMA. Si a = x(a1, a") es una geodésica ele rapidez unitaria y s1
x es parametrización ele Clairut, entonces la función
e=
G(a1)a/ =
yG(a 1 )
scnl"
es constante, donde 1" es el ángulo que va ele X 11 a a'. En consecuencia, a
no se puede salir de la región en la que G > e".
Decimos que esta constante e, asociada ele esta manera con cada geodésica a es la inclinación ele a, puesto que --- en combinación con C- - eletermina el ángulo 1" que forma a al cortar las líneas ele corriente u-parámetro
ele x (véase la figura 7.9) .
x.
r:iguro 7.9
Denwstración. Puesto que Rr = Gu = O para una pararnetrización ele
Clairut, la ecuación A" = O dd tE'orcma 4.2 se reduce a
381
LAS GEODÉSICAS
Pero esto equivale a la constancia de e
(Ga2 ' ) '
Para ver que e =
=
G' az'
yG sen rp,
a'•xv = (a/xu
a'•xv =
+
11
a'
11
+
1
=
Ca/, puesto que
G a/'= Gtta/ a/+ G a/'
comparemos las dos ecuaciones
a/xv)'Xv =Ca/= e
i Xv
Se desprende inmediatamente de
11
1
e os ( ~- -
rp) = y G sen rp
1
sen rp 1 < 1 que G > c2 •
Si a se mueve en una dirección en que G se incrementa, entonces la
constancia de e = y G sen 'P nos enseña que 'P es decreciente: a se ve
obligada a seguir más la dirección del cauce. Si, por otra parte, G va
decreciendo a lo largo de a, entonces a corta las geodésicas u-parámetro
a ángulos cada vez mayores. Hay consecuencias interesantes de esto, que se
examinan en los ejercicios 11 y 12. Esta interpretación se yueh·e particularmente sencilla en una superficie de revolución (ejercicio 13) .
Podemos añadir al lema anterior la ecuación
a 1 , -- +
~
-y--e- -~
c2
(1)
-{EC
De hecho, debido a que a tiene rapidez unitaria, tenemos que 1
Ea/ 2 + Ga/ 2 • En esta ecuación, se substituye
e
az' = G
=
a'•a' =
(2)
(gracias al lema 4.9), y se resuelve para a/, de manera que se obtiene
la ecuación ( 1 ) .
Vemos recíprocamente mediante cálculos directos que si a,' es distinto
de cero, las ecuaciones (1) y (2) implican que a= x(a/ a 2 ) es una
geodésica de rapidez unitaria. Además, que a/ sea distinto de cero es condición necesaria y suficiente para que una curva arbitraria a tenga parametrización de la forma
~(u)=
x(u, v(u)).
El objeto de todo esto consiste en que aquí podemos dar un criterio
relativamente sencillo para que una curva de esta forma sea pregeodésica;
así determinaremos las trayectorias de las geodésicas en una región con
una parametrización de Clairut. (La paramctrización especial de ~ sólo
omite, en esencia, las geodésicas dadas por el inciso ( 2) del lema 4.8; véase
el ejercicio 12.)
382
LA GEOMETRÍA DE RIEMANN
4.1 O TEOREMA. Una curva f3 (u) = x ( 11. 1' (u)), donde x es parametrización de Clairut, es pregeodésica si y sólo s1
du
du
+e y E
ve .¡e---=..-¿"
---------
Entonces, la constante e es la inclinación de (3.
Demostración. La argumentación se reduce a un CJercJCJO de cambio
de parametrización. Sea a una rep;trametrización de rapidez unitaria de
f3 derivada de la manera que vimos en el capítulo II, a partir de una función s de longitud de arco de (3. Por tanto, /3 es pregcodésica si y sólo si a
es geodésica. Sea a 1 la función inversa de s (por consiguiente, a/ no se
anula) . Entonces,
y ponemos a 2 = u(a 1 ). Los comt:'ntarios anteriores nos enseílan que a es
geodésica (de inclinación e) si y sólo si
a/
=
~ (E,
e
(1)
se evalúan en a 1 )
Si estas ecuacwnes son válidas, entonces, según el cálculo elemental,
du _ a/(s) _
du- a/(s) -
±cv E
yey-G-
(2)
e"
e
donde la substitución de S (la función inversa de al) hace de F y
simples funciones de u. Si (2) se verifica, deducimos recíprocamPntc ( 1) por
mPdio de la ecw1ción Ea 1 '" + Ga 2 '" = 1, que expresa el hecho ele que la
rapidez de a es unitaria.
1
Puesto que la fórmula anterior de du j du depende solamente de u, es
posible, por el teorema fundanwntal del cálculo, expresarla en forma de
integral como
ZJ
(U)
=
V( U0)
-t-
Ji"
•In
e y E du
rcve- e
2
Y es así como, para una parametrización de Clairut --y, en particular,
para una superficie de revolución----, el cálculo de las pregeodésicas se
reduce a una sola integración. Este criterio es, por supuesto, mucho más
simple que el de las ecuaciones diferenci<1 ks de segundo orden ele! teorema 4.2. No obstante, por desgracia, esta integración se lleva a cabo en
términos de funciones que muy raras veces resultan ser elementales.
383
LAS GEODÉSICAS
4.11
EJEMPLO.
Trayectorias de geodhicas
1) El plano euclidiano E". Partiremos ele una superficie en la que ya
conocemos las geodésicas, pero con el fin ele poner un ejemplo del resultado anterior, encontraremos sus trayectorias en términos de una parametrización polar
x(u, u) = (u cos v, u sen v).
Puesto que E= 1, F = O y G = u", esta p;uametrización es de Clairut.
Las geodésicas u-parámetro son simplemente las rectas radiales que pasan
por el origen. Todas las demás se pueden reparametrizar corno f3 (u) =
x (u, u (u) ) , donde, por el teorema 4.1 O,
En consecuencia, u - v 0 = -+-cos- 1 (e/ u), o sea, u cos ( v -· z• 0 ) = e, que
es la ecuación polar de una recta. La inclinación e tiene significación geométrica como la distancia de la recta al origen.
2) El plano hijJerbólico H. Las coordenadas polares resultan una elección más natural en este caso, puesto que la función g que nos determina
la estructura geométrica de JI depende sólo de la distancia al origen.t
Por tanto, si
(u cos u, u sen u), O < u
x(u,u)
< 2,
entonces g(x) = 1 - u"/4. (De aquí en adelante, pondremos sencillamente g.) Ahora bien, tenemos
F =O,
por lo tanto, x es paramctrización de Clairut. Por el lema 4.8, las curvas
u-paramétricas -que son rectas euclidianas que pasan por el origen-son trayectorias de geodésicas de H. Por el teorema 4.10, f3(u) = x(u,
u(u)) será geodésica siempre y cuando
du
du
_±jt7_gf!l"__)-
y1-
(cgju)
( 1)
2
Para llevar a efecto la integración requerida, pondremos
w
= -;¡a ( 1 +
2
u
)
4 ,
donde a = ~l-e+ c 2
•
t Si se hace l!na elección aún lllt'jor. h {_!e coordenadas polares hUir'rb,)licasJ
que estudiarnos en el t'jcrnplo 5.~J. se da ltl,~ar a la st:hstiluciún que en1plcarcrnos
m"ts tarde en este ejemplo.
384
LA GEOMETRÍA DE RIEMANN
Cálculos directos nos dan a continuación
dv
du
::¡:
dwjdu
y1-
w2
COS ( V -
V
(2)
En consecuencia,
2
v -
Vo
= +cos- 1 w,
o
o) =
W
= aI~ ( 1
+
u )
~-
•
Por tanto,
u2
+4
-
4
u cos ( v -
a
V o)
= O
(3)
Si aplicamos la ley de los cosenos en un diagrama parecido al ele la figura 7.10, encontramos las ecuaciones polares de una circunfcn:ncia ele
radio r con centro en x(u.0, 1\,).
U
2
+
u02
-
2u 0 u cos (u - u0 )
= r2 •
(4)
La comparación ele esto con la ecu<lción (3) nos enseña que la trayectoria
e de f3 es una circunferencia euclidiana en la que Uo 2 - r2 = 4·. Como
Uo > 2, el centro de
está fuera del plano hiperbólico H: x 2 + y 2 < 4.
Podemos ver en la figura 7.10 que la circunferencia e es ortogonal al
borde x 2 + y 2 = 4 de H. Por supuesto, f3 descansa en el arco abierto de
C en el interior de H, y deducimos el teorema 4.2 que f3 llena este arco.
Conclusión. Las trayectorias de las geodésicas del plano hiperbólico H
son las porciones de H de: todas las rectas euclidianas que pasan por el
e
origen y todas las circunferencias euclidianas ortogonales al borde de H.
La argumentación del ejemplo 4.2 nos sugiere que las geodésicas de
H son de longitud infinita (la demostración formal está en el ejercicio 1
ele la sección 5); por tanto, H es geodésicamente completa.
Las geodésicas del plano hiperbólico son comparables a las del plano
euclidiano. Hacia 300 a. C., Euclides propuso un célebre conjunto ele
Figura 7.1 O
LAS GEODÉSICAS
385
axiomas acerca de las rectas ele su plano. Tenía como meta la deducción
de su geometría a partir de axiomas cuya plausibilidad fuese tan abrumadora que resultaran ser "evidentes en sí mismos". El más famoso de
ellos es equivalente al jJOstulado de las paralelas: si p es un punto que no
pertenece a una recta a, existe entonces una recta única (3 que pasa por
p y no corta a a. Con el paso ele los siglos, este postulado empezó a parecer menos evidente en sí mismo que los dcnJCt:;. Por ejemplo, ·el axioma
de que dos puntos determinan una recta única se puede comprobar al
colocar una regla (tal wz larga, pero siempre finita) que toque ambos
puntos. Pero para comprobar d postulado de las paralelas, habría que
Figura 7.11
recorrer la longitud infinita de~ (3 para asegurarse de que nunca se corta
con a. Por lo tanto, se hicieron grandes esfuerzos par;; tratar de deducir
el postulado de las paralelas ele los ckmás axiomas. El plano hiperbólico
H constituye la prueba más convincente de que eso es imposible. Pues, si
en lugar de "rectas'' hablamos de "trayectorias de geodésicas"; entonces
todos los axiomas euclidianos se cumplen en lf, con la excejJcÍ!)n del postulado de las paralelas. Por ejemplo, dacios clos puntos, se ve con facilidad
que una y sólo una trayectoria de gcodhica pasa por ellos. Pno en la
figura 7.11 se ve con claridad que en JI hay siempre un número infinito
de traycctori:Js geocl6sic:Js que p;::¡s;:~n por p y nn cortDn a a. Cuando :;e
estudiaron las implic¡ciones ele este descubrimiento, se destruyó no solamente la esperanza modesta de deducir el postulado de las pDralclas, sino
b idea de que E" constituye, en algún sentido filosófico, un absoluto, con
propiedades evidentes en sí misrn:Js. Se convirtió en un;:¡ de la infinitbcl
de superficies gcométrÍc;::¡s descubierta por Riemann.
\
386
LA GEOMETRÍA DE RIEMANN
EJERCICIOS
1. Hágase ver que una reparametrización a ( h) ele una geodésica no
constante a es nue\ :lmente geodésica ,¡ y sólo si h es de la forma
h(t) = at
+ b.
2. Denotemos por Yv la única geodésica de .\1 con la velocidad inicial v.
Para cualquier número a, verifíquc>e que t'" (t) = yv(at) para todo t.
3. Sea V un campo vectorial en una geodésica a. Verifi<Juese que V es
paraldo si y sólo si 11 V 11 es constante y V forma un ángulo constante
con a.1
4. En la esfera :S, sean n el polo norte, p 1 y p", puntos del ecuador. Consideremos la curva quebrada (3 que va por un meridiano desde n
hasta p1, por el ecuador desde p 1 hasta Pe y entonces por otro meridiano vuelve a n desde P> Demuéstrese que el ángulo de holunomía
de (3 es el ángulo con vértice en n que forman los dos meridi:mos.
5. Encuéntrense las trayectorias de las geodésicas en la esfera estereográfica, que es el inciso (1) del ejemplo 2.3.
6. En el semiplano de Poincaré, hágase ver que las trayectorias de las
geodésicas son: todas las semicircunferencias con centros en el eje
de las u, y todas las rectas verticales. (Indicación: x(u,v) = (u,v)
es carta de Clairut "relativa a v", ele manera que, en las ecuaciones
del texto, se irwierten u y V' y E y e.) Véase la figura 7.12.
~l.
Figura 7.12
7. Sea a una curva de rapidez unitaria con la propiedad ele que e/ no
es nunca colineal con E 1 , donde E' 1 , Ec es campo de sistemas de referencia. Si n" = _1 1 F 1 + A}",'"' húgasc ver que con sólo la ccnación
A 1 = O podemos concluir que a es geodésica.
8. En el plano proyectiYo de radio r (ejercicio 6 ele la sección 2), elemuéstrese que
a) Las geodésicas son ClHYas simples y cerradas cuya longitud es -:-:r.
b) Hay una trayectoria geodésica única que pasa por dos puntos
cualesquiera diferentes.
387
e) Dos trayectorias geodésicas distintas se cortan exactamente en un
solo punto.
(Indicación: Toda geodésica en ::::: es la im~1gen, bajo la proyección
P:
~
-¿:S, de una geodésica de la esfera
~.)
9. Si C< es curva en JI con rapidez t' > O, denméstrt>se que:
a) La curvatura geodésica Ku de a es a"•](a')
. En consl'couencia,
si Af es superficie en E", K y = [ · •a' X a"
b) Si a tiene rapidez unitaria, entonces, en el ejercicio 7 dl'! capítulo V, sección 5, el c::tmpo vectorial V es b normal unitaria N
de a, y la función g es la curvatura geodésicc1 Ky.
1 O. Sea Jv1 el plano sin el origen, y pro\·eámoslo ele la cstructurzt geo-
métrica conforme pan h cuztl g = r = \(~2~+ u 2 • Encuéntrese la
curvzttura gztus,iztn::t de ,\1 y las trayectorias de sus geodésicas. Hágase
ver que kf es isométrico a una superficie en E".
11. Sezt x tmzt pnrmnetrización de Chirut, y sea "' = x ( a 1 , ae) una geodésiczt ele rapidez unitaria con inclinación c. Supongamos que a
empwzzt en el punto
a(O) =x(a 1 (ÜJ,a"(O)) =x(u 11 ,1.'u)
y que a,'(O) >O. Si existe un número u> 11 11 tal que G(u) =e",
sezt entonces u 1 el menor ele esos números. Entonces, la curva v-parámetro
f3(v)
=
x(u,, v)
se llama curva barrera de a. Demuéstrese que:
a) a se acerca a una proximidad arbitraria de [3.
b) Si f3 es gcoclésic1, re no corta :1 f3 (por tanto, a se aproxima
asintóticamente a ,B).
12.
(Continuación) Si la cuna barrera f3 no es geodésica, se puede demostrar que a corta a [3. i· Si a ( t'") es el punto de intersección, húgase
ver que a,' ( t'*) = O y que a/ cambia de signo en t·:<·. Por lo tanto,
"'"rebota"' en [3, como se w en la figun 7.13. (Indicación: Demuéstrese
que a,''(r:<·) < 0.)
13. Sea a una geodé~ica en un::t superficie de re,·olución.
a) I-Tilg:lse ver que b inclinación ele cé es e = h sen cp, donde h ( t) es
la distancia desde '"'(t) hast::t el eje de revolución y 'P da ]o, úngulos
a los que "' corta los meridi::tnos de "H.
b) DL'clÚz<asc qu(' " no pl!Cck cortar un para lelo dC' r::1dio ] r ¡-
t Süponcmos, por supuesto, qnc
cla por x.
tt
se queda dentro de la región paramctri1a·
388
LA GEOMETRÍA DE RIEMANN
Curvas u-paramétricas
Figura 7.13
14. Sea a una geodésica de inclinación r en el paraboloide de revolución
Af: z =
X~
+ )'~.
EncuéntrPse el \·alcr mínimo ele :::(al, es ckcir. la altura menor a que
Descienda a. (Indiració11: Empléese una carta ele Monge.)
15. Demuéstrese que no hay ninguna gcoclésic::t en la trompeta (V. 6.6)
que se pued::t definir en la totalidad de la recta real.
16. En un toro de re\·olución, sea a una geodésica que en algún punto
es tangente a la circunferencia superior (u = 7./2). Demuéstrese que a
siempre SP quecb en la mitad ele afuera cid toro ( -7./2 <u< 7./2)
y viaj::t alrededor del toro con oscilaciones que la llevan de la circunfercnci::t superior a la circunfnencia inferior.
17. Sea C un catenoide (ejemplo 6.1 del capítulo V) en el que e = L
y sea a la geodésica con la propiedad ele que
a(O)
=
x( u 0 ,
U0 ),
1/o
=:/=O,
y ele que a'(O) forma un ángulo cpn con los meridianos. Observemos
que 'Pn y 7. - '?o determinan parametrizaciones diferentes de la misma
gPodésica.) ¿Para qué valores de 'Po se tiene que a corta la circunferencia mínima, u = O, ele C?
18. Una jJaramet;ización de Jjou:·il!c x: D --c> 1\1 es una paran1etrización
ortogonal para la cual E = (; = U + V, donde U es una función
solamente ele 11 y rr es función solamente de V. Si a= x(al, ae) es
una geoclé:áca de rapidez unitaria c¡ue se expresa en términos de una
parametrización así. háf2:<l'C \Tr quP
tiene valor constante, donde 'P es el ángulo desde
X 11
hasta a'
PROPIEDADES MINTMIZANTES DE LAS GEODÉSICAS
389
19. Sea E 1 , E 2 un campo de sistemas de referencia en una superficie
geométrica .M. Para i = 1, 2, sea K¡ (p) la curvatura geodésica en
p de la curva integral de E; que pasJ. por p.
a) Demuéstrese que K= E 1[K"]- Ej,<,] - K," -K/.
b) Verifíquese estJ. fórmub en una superficie de revolución J.rbitrJ.ria, por medio del campo ele sistemas de rcfcrenciJ. del ejemplo
6.4 del capítulo VI.
(Indicación: En a), demuéstrese que ,,,,dL'¡) =K¡.)
S
Propiedades minimizantes de la longitud de las geodésicas
En la sección anterior, pensamos en las geodésicas como las curvas más
rectas; aquí investigarnos su carácter corno las cmTas más cortas. El prcblema básico es, dicho sin mucha pn'cisión, el de encontrar la tr:~yectoria
más corta ele un punto a otro en una superficie geométrica. En E 2 , la
solución es simple: Dados dos puntos p y q, hay un segmento único
ele recta que va de p a q, y esa trayectoria es más corta que la de cualquier otra curva que vaya desde p hasta q (ejercicio 11 de la sección 2
del capítulo Il). En una superficie geométrica arbitraria Af, la situación se vuelve más intcrPsante. En primer lugar, puede no existir la
curva más corta de p a q (ejercicio 3 de la sección 4 del capítulo
VI). Y, en caso de existir, tal l'ez no sea única. Por ejetuplo, no tardaremos en clPmostrar el resultado previsible de que, en una esfera, todas
las semicircunferenciz:s que van del polo norte al polo sur tienen la misma
longitud mínima. Para que nuestra terminología se vuelva precisa, emplearemos el concepto de distancia intrínseca (capítulo VI, sección 4).
5.1 DEFINICIÓN. Sea a un segmento de curva que va desde p hasta q
en M. Entonces
1) a es uno de los segmentos de curva más cortos desde p hasta q
cuando L(a) = p(p,q)
2) es el segmento de curva más corto clesdt: p hasta q cuando
L(a) = p(p,
q)
y, además, cualquier otro segmento de curva más corto desde p hasta q
es simplemente reparametrización de o:.
En el primer caso, también se clicc que a mmzmzza la longitud de aro!
desde p hasta q: la definición signific:1 que si f3 es cualquier otro segnrnto de curva desde p hasta q, entonces !"((3) >!"(a).
E11 el segundo caso, decirnos que a minimiza de manera única la lm!gitud de arco. Esta "unicidad" se debe entender con la liberalidad suficiente para tomar en cuenta la reparametrización, puesto que la repara-
390
LA GEOi\IETRÍA DE RIEMANN
metrización monótona (ejercicio 10 de la sección 2 del capítulo II) no
altera la longitud de arco.
Todas estas curvas más cortas resultarán ser geodésicas (lema 5.8).
El primer resultado principal (teorema 5.6) nos enseñará que los segmentos geodésicos que son mficientemente cortos se comportan en una
superficie geométrica arbitraria tan birn como lo hacen en E". Antes ele
eso, necesitaremos algunos preparativos.
En el plano euclidiano, cuando nos interesa la distancia al origen,
resulta natural el empleo ele las coordenadas pobres, pues, entonces, la
distancia desde O hasta
x(u, v) =(u cos u, u sen v)
es simplemente u. A continuación, gelleralizaremos esta parametrización
al caso de una superficie geométrica arbitraria "U. Como teníamos en el
caso de E", las curvas u-parámetro serán las geodésicas que salen de un
punto fijo p de ,U. Se pueden describir esas geodésicas de manera conveniente del modo que veremos en seguida: Si v es un vector unitario
tangente en p, sea /v la geodésica única que empieza en p con la \·elocidad
inicial v. A continuación, vamos a organizar todas estas geodésicas dentro
del mismo mapeo de la manera siguiente:
5.2 DEFINICIÓN. Sea e 1 , e 2 un sistema de referencia en el punto p
de M. Entonces
x(u,v)
=
Yc .. ere¡+Sent·e,(u)
es el mapeo polar geodésico de M
con polo p.
Aquí, el dominio de x es la región más grande de E" en que la
fórmula consen·a su sentido. La elección de v fija un vector tangente y
unitario
v
=
cos ve 1
+
sen vee
rn p (figura 7.14) . En ton ces·, la curva u-paramétrica.
Figura 7.14
u~x(u,
v) =¡_.(u)
es la geodésica radial con velocidad inicial v. Puesto que 11 v 11 = 1, la
rapidez de esta geodésica es unitaria, de manera que la longitud de
1\- desde p = 1, (O) hasta yv(u) es sencillamente u.
En el caso especial en que e 1 , e 2 es el sistema natural de referencia en
el origen O de E 2 , el mapeo polar geodésico se convirrtc en
PROPIEDADES MINIMIZANTES DE LAS GEODÉSICAS
X
(u, V)
=
Ye os
ve1 + sen ve 2
391
(U)
= O + u (cos ue 1 + sen ue 0 )
= (ucosv,usenu).
Por lo tanto, x es una generalización de las coordenadas polares del plano.
El polo p es lugar problemático en un mapeo polar gcod(.~ico. Para
clarificar la situación en las proximidades ele p, definimos (de acuerdo
con la situación que se describe en la definición 5.2) un nuevo mapeo
v'u
v) = Yuc1 + ve, (1) ·
J \
'
La teoría ele ecuaciones diferenciales nos enseña que y es clifcrenciablc,
y se verifica con facilidad su regularidad en el origen. Por lo tanto,
según el teorema ele la función inversa, y es difeomorfismo de un disco
D,: u" + v~ < E" sobre una vecindad 'JZ, de p. 'Jl, se llama vecindad normal de p. En el caso especial en que M = E", y es simplemente el mapeo
identidad y( u, v) = (u, v), de manera que si 1\1 es cualquiera, y es generalización de las coordenadas naturales (rectangulares) de E 2 .
5.3 LEMA. Para un número E> O suficientemente pequeño, sea S, la
franja O< u < E en E 2 • Entonces, el mapeo pobr geodésico x: S-;. M
con polo p parametriza una vecindad normal 'Jl, de p, que omite al
mismo p (véase la figura 7.15) .
r--s.E1
o
E
~.
Figura 7.15
Demostración. Observemos que x le pasa a y la relación habitual ele
las coordenadas polares y las rectangulares, es decir
x(u,v)-
YcosVet+Senve,(u)
= y(u cos v, u sen v)
= Yucosvet+Usenve,( 1 )
392
LA GEOMETRÍA DE RIEMANN
Figura 7.16
donde hemos aplicado la identidad y, (u) = Y,,, ( 1) del ejerocw 2 ele la
sección 4. Aquí, esta fórmula nos expresa a x como composición ele dos
mapeos rc~ulares:
1) El rnapeo polar euclidiano (u, v) -----'? (u cos v, u sen v), el cual envuelve la franja S, alrededor del disco D,. y
2. El mapeo uno a uno y ele D, sobre ':JZ .•
Por lo t:mto, x es regular y transforma S, de la manera propia ele las
coordenadas polares sobre la vecindad 'J7" donde se omite solamente el
pclo.
1
De aquí extraemos una consecuencia fundamental: SI q = x (u 0 , v,)
es cualquier punto en una vecindad normal 'J7 ele p, entonces hay una
sola r:eorihica de rapidez unitaria que va desde p hasta q que queda
comfJ!etarnente dentro de ~7, a saber, la geodésica radial
y(u)
=
x(u, v 0 )
(Demostración: Cualquier geodésica de rapidez unitaria que com1enza en
p cs, por la unicidad de las geodésicas, una curva u-paramétrica de la param(•trización polar. Como nos lo sugicrc la figura 7 .16, todos, con la
cxcepción de v = 1'o + 2c.n, salen de 'J7 sin tocar q, y las elecciones diferentes de n nos siguen dando la misma geodésica y, gracias a la ambigüedad habitual que interviene en las coordenadas polares.)
5.4
G >O.
LEMA.
En una paramctrización polar geodésica, ¡;;
=
1, F
=
O.
Demostración. Puesto que las curvas u-paramétricas son geodésicas de
rapidez unitaria, tenemos que
F
Por lo tanto,
=
Xu • X 11
1'
y
O.
PROPIEDADES MINIMIZANTES DE LAS GEODÉSICAS
393
de manera que F es constante en cada curva u-paramétrica. Ahora bien,
las funciones E, F, G están bien definidas, aun cuando x no se restrinja
a la franja S,. La curva v-paramétrica v~ x(O, v) es simplemente la
curva constante en el polo p, de manera que
Pero, entonces, F(O, u) =O para todo u, y, puesto que F, = O, c"oncluimos
que F es idénticamente cero. Debido a que x (que aquí se ha restringido
una vez más a la franja S,) es una parametrización, es decir, un m apeo
regular, sabemos que EG - F 2 = }~G no es nunca cero. En consecuencia,
G >O.
1
5.5 EJEMPLO Vamos a separar explícitamente las parametrizacioncs
polares geodésicas en dos casos clásicos.
1) La esfera unitaria ~ en E 3 . Para tener más simplicidad, sea p el
polo norte (0, O, 1). Para que las geodésicas irradien de p como se ve en
la figura 7.17, cambiamos la parametrización geográfica a
x(u,v) =(sen u cos v, sen u sen v, cos u).
Cada curva u-paramétrica es, en efecto, una parametrización de rapidez
unitaria de uno de los grandes círculos; en consecuencia, es geodésica.
Para u = O, encontramos
Xu(O,v) = (cosv,senv,O)
= cos ve1
+ sen ve2
donde
Por lo tanto, granas a la unicidad de las geodésicas,
X
(u, V) = Ye os
ve 1 + sen
p
Figura 7.17
t'P
2
(U)
394
LA GEOMETRÍA DE RIEMANN
lo que nos enseña que x, según lo hemos definido, es el mapeo polar geodésico (definición 5.2). Es fácil ver que la vecindad normal mayor posible
Jl, de p ocurre cuando E = .,., pwe>s en la franja S,, x es paramctrización
polar de la totalidad de la esfera, con la excepción de los polos norte y sur.
2) El jJlano hijJerbólico !J. (ejemplo 2.4). Tomamos p= (0,0) y
e1 = Ut(p),e" = Uc(p). (Puesto que la función g rs 1 en el origen, esto
n sistema de referencia.) Sabemos, gracias al ejemplo 4.11, que las
geodésicas de H que pasan por el origen siguen trayectorias de rectas
euclidianas. Por tanto, para cualquier número v, la curva
<t ( t)
= ( t cos v, t sen v)
es por lo menos pregeodésica del tipo que buscamos. En el ejemplo 2.4,
en con tramos que la función de longi tu el de arco s ( t) = 2 tanh-1 ( t /2)
para una curva así; por tanto,
s--¿ a( 2 tanh ~)
= ( 2 tanh
i
cos
v, 2 tanh
i
sen
v)
es la reparamctrización de a ele rapidez unitaria. Al cambiar la notación
de s a u, obtenemos
x(u,v) =
(2tanh~cosv,2tanh~senv).
Puesto que las curvas u-parámetro de x son geodésicas de rapidez
unitaria, y
Xu (0, v) = cos ve1 + sen vez,
llegamos a la conclusión, como en ( 1), de que x es mapeo polar geodésico.
La vecindad normal es, en este caso, la totalidad de la superficie H.
5.6 TEOREMA. Para cada punto q de una vecindad normal 'Jl, de p,
el segmento geodésico radial en 'Jl, que va desde p hasta q minimiza de
manera exclusiva (única) la longitud de arco.
Demostración. Sea x la parametrización polar de la vecindad normal
'Jl,. Si
q = x(uo, v 0 ),
el segmento geodésico radial será
y( u) = x(u, vo),
Sea a continuación a un segmento de curva arbitrario desde p hasta q
en M; podemos arreglar las cosas de manera que a quede definida en el
mismo intervalo que y.
PROPIEDADES MINIMIZANTES DE LAS GEODÉSICAS
395
Empezaremos por la demostración de
que
( 1)
Consideremos en primer lugar el caso
(figura 7.18) en que a se queda dentro
de la \Tcindad 'Jl . Podemos suponer
que, una vez que parte de p, a no regresa nunca a p; de lo contrario, sería
suficiente para nosotros eliminar ese rodeo, y tendríamos una a de menor longitud. Por tanto, bien podemos poner
Figura 7.18
Puesto que a (O) = p y a ( u 0 ) = q, tenemos que
(2)
(El término 2-;;-n está aquí otra vez debido a la falta de unicidad de los
ángulos en las coordenadas polares.)
Puesto que tenemos para x que E
=
1 y F
=
O, la rapidez de a es
Ahora bien,
(3)
En consecuenCia,
L(a) = J:o y a/"+ Ga/ 2 dt
=
al(u 0 )
a1(0)
-
>Lo a/
=
dt
(4)
U0
donde, en el úllimo paso, interviene (2). Pero la geodésica radial tiene
rapidez unitaria, de manera que
uo
L (y) =
J
dt = u 0 ,
0
y llegamos a la conclusión de que
L(y) <L(a).
396
LA GEOMETRÍA DE RIEMANN
Si a no se queda en 'Jl, tenemos la desigualdad estricta L (y) < L (a).
Pues es preciso que a pase por la circun fcrcncia jJO!ar, u = u 0 --que se
indica con una línea punteada en la figura 7.18- para salir de 'JZ,.t
Pero, de acuerdo con la demostración anterior, su longitud ck arco ha de
ser, por lo menos, u 0 = L (y) cuando llega a esta circunferencia.
A continuación, demostraremos la afirmación de unicidad:
Si L(a) = L(y), entonces a es reparametrización ele y
(5;
La argumentación anterior nos ha ensciíado que, si ], (a) = L (y),
entonces a permanece dentro ele ~!7, y la clcsigualclacl de (4·) se convierte
en igualdad. Esto {¡Jtirno implica que y at'" + ()a/" = a/. Puesto que
C > O, concluimos a partir ele (3) que
a/>0,
a/
Por lo tanto, a" tiene el valor constante
a(t) = x(a 1 (t),
Z'v)
=
1.'o
O
(con lo cual n
(6)
=
O en ( 2) ) , y
= y(ai(t)),
con lo que vemos que a es, en efecto, parametrización monótona de y.
1
Figura 7.19
Este resultado fundamental nos enseña, como decíamos antes, que si
los puntos p y q están suficientemente cerca el uno del otro, entonces
-corno se tiene en el espacio euclidiano !_Jara puntos arbitrarios---; hay un
segmento geodésico único que va desde p hasta q y es más corto que
cualquier cmYa clesd(: p hasta q. (La diferencia con el caso euclidiano,
sin embargo, radica en que puede haber otras geodésicas que no sean de
las más cortas desde p hasta q.) Si x es parametrización polar geodésica
en p, también decimos que la trayectoria C, de la curva v-parámetro
u = E, es la circunferencia polar de radio E en p (figura 7.19). El teore-
"f En una demo:;tración cuidadosa se ha de intervenir el axioma de Hausdorff
(ejercicio 5 de IV.3), cuya \·alidcz suponemos en todo este capítulo.
PROPIEDADES MINIMIZANTES DE LAS GEODÉSICAS
397
ma 5.6 nos enseña que C, consta, en realidad, de todos los puntos que
distan E de p.
En los casos especiales en que se tienen vecindades normales grandes,
esta información local puede resultar decisiva.
5.7 Ep:MPLO. Propiedades minimi.:antes de la longitud de las geodésicas en la esfera :S de radio r. Con un simple cambio ele escala~ poclcmos
concluir, a partir del ejemplo 5.5, que cada punto p de :S ticne una vecindad normal 'JZ .. ,.: la totalicbd ele :S con la t>xccpción de - p, el punto
antípoda del polo p. En comecuencia, el teort>ma 5.6 implica que:
a) Si dos puntos p y q de :S no son antípodas (es decir, q =/= - p),
entonces cxiste una cun·a única 1 que es la mús corta desde p hasta q.
Pero conocemos todas las geodé-sicas ele :S: sólo puede ser la que va por
t>l ;¡reo mús corto del gran círculo que pasa por p y q.
b) La distancia intrínseca p en :S está dada por la fórmula
p(p, q) =
n'}
clnnclc ¡'} ( Cl < {} < ") es el &ngulo desde p hasta
q en E' (figura 7.20). Si p y q no son antípodas,
esto es consecuencia de (a), debido a que
e(p, q)
=
!,(1)
=
r{}.
A medida que q se mueve hacia el punto
antípoda - p ele p, deducimos, por continuidad,
Figura 7.20
que p(p, -p) = r. En consecuencia:
e) Hay una infinidad ele geodésicas miniruizantes que van ele un punto
p de :S al punto antípoda - p, a sabrT (parametrizaciones de rapidez
constante ele), semicircunferencias que \"an de p a -p. (Demostración:
Todas ellas tienen longitud r = p ( p, - p).)
d) :-Jo hay ning(m segmento geodésico de longitud L (1) > .. r capaz
de minimizar la longitud de arco entre sus extremos. Esto se desprende
inmediatamente del hecho de que la distancia intrínseca p nunca excede
ele .. r. Esto se ve geométricamente con claridad, puesto que si y empieza
en p, su longitud es mayor que ::-r en cuanto 1 pasa por el punto antípocl2
-p. Pno, entonces, el otro arco /' del mismo gran círculo es mis corto
que y.
Supongamos que o: es un segmento ele cmYa en ¡\[ desde p ha;,ta q,
y que f3 es un segmento de curva desde q hasta r. Ahora bien. en general
no es posible unir o; y f3 para form:u una sola cun·a ( dife¡cnciable) que
vaya ele p hasta r, puesto que en q puede baber una "punta ;¡guda"',
cmno se ve en la figura 7.21. Por medio de las técnicas del cálculo avanzado, se puede '·redondear'' esta punta aguda, de manera que se obtenga
398
LA GEOMETRÍA DE RIEMANN
q
Figura 7.21
un segmento de curva y desde p hasta r que (si enunciamos el teorema
más débil) es sólo un poco más larga que a y (J. De manera m:Ís explícita,
para cada E> O, hay una y tal que !"(y) ~!,(a) + I"((J) +E. De esto
se desprende que, en la distancia intrínseca, se cumple la desigualdad del
triángulo. De hecho, dados los puntos p, q v r, la definición ele distancia
intrínseca nos enseña que, para cualquier E> O, existen curvas a y fJ como
las de antes con la propiedad ele que
L(a) < p(p, 11)
+
E
L((3) S p(q, r) +E.
El redondeo ele la punta aguda en q no cuesta más ele otro E: obtenemos
un segmento de curva y desde p hasta r con h propiedad de que
p(p, r) S L(y) S fl(p, q)
Pero, como
E
+
p(q, rl
+
3E.
es arbitrario, llegamos a la conclusión de que
p(p,r)<p(p,q) +p(q,r).
5.8 LEMA. Si a es uno de los segmentos de curva más cortos en ,\1
desde p hasta q, entonces a es geodésica.
Demostración. Demostraremos que si a: [a, b] -J> j { es segmento de
curva desde p hasta q que no es geodésica, entonces L(a) > p(p, q). Pero
si a no es geodésica, entonces hay un momento t 0 en el que la aceleración
a" (t 0 ) no es cero. Por continuiclacl, a" no puede ser cero en las imncdiaciones ele t 0 , ele manera que podemos suponer que t 0 < b. Para un E > O
que sea suficientemente pequeño, a(tu + E) queda en una vecindad normal
ele a
, y el segmento de a que va dt>sclc t,1 hasta t 0 + E no es geodésica,
puesto que a" (t 0 ) =F O (figura 7.22 l. Pero, entonces, de acuerdo con el
Figura 7.22
399
PROPIEDADES MINIMIZANTES DE LAS GEODÉSICAS
teorema 5.6, su longitud L 1 ,,,t,,c, es estrict;unente mayor que la distancia intrinseca desde a(to) hasta a(t 0 + E). Por tanto. según la desigualdad del
triángulo,
> p(p, a(t
0 ))
+
p(a(t 0 ), a(to
+
E))
+
p(a(t"
+
E), q)
1
>p(p,q).
Este result:1do no nos sorprende: demaoiado: e1 camino más corto no
puede dar vuelta nunca. Tampoco tcnclrú puntas agudas, ptF:s unzt argumentación un poco más complicada nos hace ver que una curva más corta
(que tal vez sea quebrada) tendrá que ser, ele hecho, geodésica (no quebrada).
Aquí podemos ya enunciar el resultado fundamental ele esta sección.
5.9 TEoRJ·:\IA. Dados dos puntos cualesquiPra p y q en una superficie
geodésicamente completa ;\f, existe un sPgrnento geodésico más corto desde
p hasta q.
Demostración. Este procedimiento es ingenioso, y su elaboración se
clpbe sucesi,·amente a y arios matcmúticos. (V é:1se el teorema 10.9, pág. 62,
ele la obra de Milnor [7].) Empezaremos con la elección ele un candidato
a la curva más corta desde p hasta q. Sea
p (V)
=
X
(a, V) ,
parametrización de la circunferencia polar C ele radio a en una vecindad
normal ele p. Por el ejercicio 6, tenemos que la función v-7p(f3(v),q)
es continua en el inte1Talo cerrado [0, 2,.]; en consecuencia, la función toma
su valor mínimo en, concretamente, v 0 • Sea ¡ la cun·a parámetro, v = v 0 •
Puesto que "~1 es geod{:sicamente completa, y (u) está definida para todo
u> O. Veremos que y llega a q; en realidad, que
-¡(r) = q
donde r
p(p,q).
=
( 1)
(E<:ta es la situación que ilustra la figura 7 .23.1 Puesto que ¡ ti en~ rapickz
unitaria, 0htendrcmos que
L(y)
\~
T
=
p(p,q),
el teoremzc quedará demostrado.
P;1ra nTificar ( 1), emplParemos una varianon de la argumentación
inductiva estándar en la cual se reemplazan los n{tmeros enteros por los
reales. Para cada número u =-:: O. consiclercuos la afirmación
cA (u) :
p(y(u),ql
'ce
r- u
(2)
400
LA GEOMETRÍA DE RIEMANN
Figura 7.23
donde, como antes, r = p(p,fJ). Esto nos dice que y (ck rapidez unitaria)
es eficiente: después de recorrer una distancia u, la distancia hasta q ha
quedado reducida precisamente en u. Concluiremos la demostración cuando
exhibamos la validez de '-il ( r), pues, entonces,
p(y(r). q) =O,
de manera que, por el ejercicio \ y ( r) = q. Empezaremos a trabajar en
esto con la Yerificación ele que '-il (a) es yáJicla cuan el o a es la que definíamos antes: es dec:ir,
p(y(a), q) = r - a.
(3)
Según el teorema 5.6, p(p, y(a)) =a; en consecuencia, por la desigualdad
del triángulo,
r= p(p,q) <a+ p(y(a),q).
Para llevar a ( 3), hemos de ÍmTrtir esta desigualdad. Por la definición de
distancia intrínseca, para cualquier E > O, existe un segmento de curva a
desde p hasta q tal que
L(a) < p(p, q)
+
E.
Ahora bien, a tiene que tocar en la circunferencia polar C; digamos que
lo hace concretamente en a ( t 0 ), y observemos que la porción de a desde p
hasta a(t 0 ) tiene la longitud L 1 >a, y lo que queda de a tiene longitud
(Esto último es porque y (a) era un punto más cercano a q en C.) Por
consiguiente.
a+ p(y(a), q) < L1 +Le= L(a) < p(p, q) +E.
Y, puesto que
E
era arbitrario, obtenemos la desigualdad
a+ p(y(a), q) < p(p, q)
que necesitábamos para demostrar (3).
401
PROPIEDADES MINIMIZANTES DE LAS GEODÉSICAS
P
= 'Y(O)
q
Figura 7.24
Aquí pasaremos a la parte inductiva de la dcr11ostr;¡ción. Pm";io c¡uc
e ·1 (u) carece ele sentido para u > r. Por co!lSÍguiente, el conjunto dP los números a para los que se verifica , 1/ (a) ti eH·
un supr!:'mo b. con b < r. Puesto que las funciones que intl-rvienen en la
proposición e 1/ (a) son continuas, sr desprende ele la ddinición ck supremo
que Jl (b) es válida.
He aquí el plan del resto ele b demostración: se su jwne que b < r
y se obtiene una contradicción. Entonces. puesto que b < r, lll'mos ele tener
que b = r; en consecuencia, cA(r) se verifica, como queríamos.
Sea C'' una circunferencia polar de radio a* < r - b en una vecindad
normal ele y ( b). Al n·producir la argumentación qur clirnos con respecto
a la circunferencia e, obtcnemos un punto e"' ron la propiedad ele que
p no puede ser negativa,
p (e'", q)
=
(3')
p ( ¡ ( b 1, q) - a"'.
(Véase la figura 7.24.) Pero '--"1/(bl dice que p(y(b),q)
nera que
p(c"', q)
=
r- b -
r - b, de ma-
(4)
a'''.
El paso principal que nos falta dar es la demostración de que
(5)
e'=y(b+a"').
Esto no resulta drmasiado difícil. Mediante la clesigualclacl del triángulo,
p(p, e)
+
p(e*, q)
> p(p, q)
=
r.
Al aplicar ( 4), obtmemos
e(p, e')
:=:: b +a'.
Pero hay una e un;¡ quebrada desde p hasta e··· con longitud precis;¡mentc
de b + a'''. De hecho, si \Trnos la figura 7.24·, nos damos cuenta de que
podemos recorrer y desde p hasta y ( b) con la longitud ele arco b, y a
continuación, desde y ( b) hasta e"' en una geodésica radial con longitud
402
LA GEOMETRÍA DE RIEMANN
de arco a*. Por tanto, de acuerdo con el comentario que se hizo antes de
este teorema, esta curva no está en realidad quebrada. En consecuencia,
se trz:ta de y en todas partes, de manera que ¡ ( b + a'') es precisamente e*.
Por último, substituimos la información de ( 5) en (4), de manera que
obtenemos
p(y(b+a''),q) =r- (b+
Esto nos dice que ,_ji (b + a ) es válida, y como b + a* es estrictamente
más grande que la cota superior b, tenemos la contradicción qur buscábamos.
1
EJERCICIOS
1. En el plano hiperbólico H, encuéntrese la distancia intrínseca desde el
origen O a un punto arbitrario p. Dedúzcase que todas las geodésicas
de H tienen longitud infinita y que, en consecuencia, JI es completo.
(Indicación: Aplíquese la desigualdad del tri:mgulo.)
2. En el semi plano de Poincaré (ejercicio 6 de la sección 4) :
a) Encuéntrese una ecuación F(x, y, e) =O de las trayectorias de las
geodésicos semicirculares que pasan por el punto (0, 1).
b) Encuéntrese una ecuación G(x, )',a) =O de las circunferencias
polares con centro en (0, 1) (Indicación: Son las trayectori<1s ortogonales de las curvas de (a) . )
e) Hágase un basquejo en el que se vean varias curvas de cada familia.
3. En el punto p = (r, O, O) del cilindro Ji: x 2
e1
=
(0, 1, O)
y
+
y2 = r 2 , sean
e 2 = (0, O, 1).
Encuéntrese una fórmuh explícita del mapco y (pág. 391) en este
caso. ¿Cuál es la mayor wcindad normal del punto p?
4. Compruébese la validez del procedimiento que emplearnos en la demostración del teorema 5.9 al aplicarlo al caso especial .U = E 2 . Es
decir: a partir del mapeo polar geodésico
x(u,u) = (p 1 +ucosu,p 2 +usenv)
enp.
procédase de acuerdo con la primera parte de la demostración del
teorema 5.9 para determinar la geodésica y.
S. La distancia intrínseca es una métrica en M. Hágase ver que
a) U na vecindad normal JI, de p consiste en todos los puntos q de
M tales que p(p, q) < E.
PROPIEDADES MINIMIZAN TES DE. LAS GEODÉSICAS
403
b) p cumple con las tres propiedades métricas: i 1 p >O y p (p, q) = O
si y sólo si p = q, ii) p(p, q) = p(q, p) y iii) la desigualdad del
triángulo.
(Indicación: Es necesario recurrir al axioma de Hausdorff con el
objetivo e¡ u e se describe en la nota al pie de la página 396.)
6. La distancia intrínseca es continua. Es una superficie geom~trica 1.1,
definimos p¡ ~ p como la sucesión dP números reaks p(p, Pi)
que converge a O. Demuéstrese que si p¡ ~ p y f{¡ ~ q, entonces
(p;, q;) convcrge a p(p, q).
7. Sean a y f3 dos geodésicas de rapidez unitaria. distintas entre sí, que
parten del mismo punto a (O) = f3 (O) . Si a y f3 se n1f'lven a cortar
después de haber recorrido cada una la misma distancia r > O, es
decir, oé ( r) = [3 ( r), demuéstrese que, mús allá de r, ni a ni f3 minimizan la longitud de arco. (Aplíquese el hecho de que las geodésicas quebradas no pueden minimizar la longitud de arco.)
8.
(Continuación). En el cilindro 1.1: x 2 + y2 = r 2 , demuéstrese que:
a) T:na geodésica que empieza en (a, b, e) no puede minimizar la
longitud de arco después de pasar por la recta antípoda t ~
(-a, -b, t).
b) Si q no pertenece a la recta antípoda de p, demuéstrese que existe
una geodésica única que es la más corta desde p hasta q.
Declúzcase una fórmula de la distancia intrínseca en el cilindro.
9. Demuéstrese la falsedad del recíproco del teorema 5.9: póngase un
ejemplo de una superficie geométrica 1.1 tal que dos puntos cualesquiera que puedan unir por medio de una geodésica minimizante, sin
que 1.1 sea geodésicamente completa.
1O. Sea y: [a, b]--:> 1.1 parametrización de una porc10n de un meridiano
de una superficie de revolución i\1. Demuéstrese que y minimiz:t de
manera única la longitud de arco. (Indicacic)n: Exprésese una cur\'a
a ele la que se pretenda lo mismo como x ( a 1 , a~), donde x es parametrización canónica, y repítase el procedimiento del teo1Tn1a ( 5.6.)
11. Sea Jf una superficie de revolución aumentada (ejercicio 12 ele IV.l).
a) Si J1 tiene solamente una intersección (con el eje de re\·olución)
hág:m: ver que tocb geodésica y de lvf que parte de p minimiza
ele manera única la longitud de arco.
b) Si 1\1 tiene una segunda intersección q con el C'je de re\·olución.
demuéstrese que lo propuesto en (a) se cumpl(' si y sólo si y
no llega a q.
(Indicación: No es necesano hacer cálculos.)
404
6
LA GEOMETRÍA DE RIEMANN
Curvatura y puntos conjugados
Haremos un breve examen de la influencia de la cmYatura gaussiana 1\.
de una superficie geométrica lvf en las geodésicas de Jf.
6.1 DEFINICIÓ=". L n segmento geodésico ¡ cksck p hasta q mmnniza
localmente la longitud de arco desde p hasta q cuamlo, para .cualquier
segmento ele cun·a a que yaya ele p a q y esté suficientenwntc cerca
ele y se tenga que L(a:) > ],(¡).
Para clarificar el sentido de la frase "suficicntcuH·nte cerca", definiremos en primer lugar que ex se E-acerque a ¡ cuando hay una ll']Jarametrización á ele ex, C'll el mismo in ten al o I que ¡, tal que p (a ( t)' 1 ( t) ) < E
para todo t en I (figura 7.25). A continuación, alteramos el final ele la
definición 6.1 ele manPra que diga "cuando exista un s > O tal que, para
cualquier ex que se E-acerque a y, tengamos que L(a:) >lo(¡)". Esta
mm1mización local es estricta (o única) cuando tenemos la desigualcbcl
estricta
L(cx)
>
L(y),
a menos que ex sea rcparametrización ele y.
q
p
Figura 7.25
Para darnos una idea intuiti\·a de esta definición, Yamos a imaginarnos
que y es una cuerda elástica ---o liga- que 1) está const rcílida a permanecer en ;\!: :.! ) cst{t en tc·nsión, y 3) tiPne sus extremos sujetos a p y q.
Puesto que ¡ es geodésica, cstCt en equilibrio: si no lo fuese, su tensión
la haría cambiar de posición y voh-crc:c más corta. Pero, ¿es estable el
equilibrio? Si hacemos un poco a un lado ¡ )¡;¡<,(a obtener una nue\·a
cun·a ex y la soltamos, ¿ \·oh-crá a la posición ori~inal, y:' Es evidente que
405
CL'RVATURA Y PUNTOS CONJUGADOS
y es (estrictamente) estable si y sólo si y es un mínimo (estricto) local
en el sentido que se ha definido, pues si a es más larga que y, la tensión
la voh-erá a la posición de y.
La imTstigación de la minimización local depende del concepto ele
puntos conjugados. Si y es una geodésica de rapidez unitaria que comienza
en p, entonces y es una curva u-parámetro, v = v 0 , de un mapeo polar
geodésico X con polo p. Sabrmos qut:, a lo largo de y, la función
= Xv
• x, es cero en u = O, pero es no nula inmeclia tamente después (lema 5.4).
un punto y(s) = x(s, s0 ) en el que s >O es punto conju¡.;ado ele y(O) = p
en y cuando
s, V o) = O. (Estos puntos pueden existir o no existir.)
El significado geométrico ele los conjugados se apoya en la interpre-
e
e(
.' d e• •v1 (, ' taoon
- JI, x,. , como 1a tasa a 1a cua 1 se :1partan 1as curvas
u-parámetro (geodésicas radiales). Dicho sin gran precisión, si E > O es
1
1
1
fijo y si Y e= 1! Xv 11 es grande, entonces Ja distancia desde x(u, v)
hasta x (u, v + E) será grande: las geodésicas radiales se apartan con rapidez. Cuando y G es pequeña, esta distancia también lo es, y las geodésicas radiales se juntan nuevamente. Por consiguiente, cuando G se anula
en un punto conjugado
ello nos sugiere que, s1 v está cerca ele v0 , las curvas u-parámetro han
llegado todas a este punto después ele haber recorrido (con rapidez unitaria) la misma distancia s 1 (figura 7.26). Por desgracia, tal vez no se dé
en realidad ese encuentro. (e solamente controla los términos de prirnera
derivada, y los términos ele orden mayor pueden seguir siendo distintos de
cero, aunque G se anule.)
x(S¡, Vo)
Figura 7.26
El pLmo cuclicli<nlO E" nos debe dar la t:t"a ·'cs:úndar·· a la cual se
<l]J<nt:m b:; ¡:;coclé;icls radiz\lcs, y par:1 x (u, Z'! =' ( 1' ,cJ;; Z'. u sen z.'), tcn:·mo:- c¡uc
406
LA GEOMETRÍA DE RIEMANN
En particular, no hay puntos conjugados. Comparemos los casos del ejemplo 5.5, a saber, la esfera unitaria ::S y el plano hiperbólico II. En relación
con :S, encontramos que
ve=
sen u.
Por lo tanto, las geodésicas radiales que parten concretamente. del polo
norte p de ::S, se apartan con menor rapidez de la que lo hacen en E",
puesto que sen u <u para u > O. En pfccto, se ve en la figura 7.17 que,
una vez que han pasado por el ecuador, empiezan a juntarse unas con
otras. Todas tienen su primer punto conjugado después de recorrer una
distancia .,.., puesto que ~G-( .,.., v) = sen" = O. En este caso, por supuesto,
el encuentro de las geodésicas sucede realmente; el lugar es el polo sur
ele :$.
En d plano hiperbólico, sabC'mos que las geodésicas que irradian del
origen son simplemente rectas euclidianas, pero se apartan más rápidamente que en E", como se espera a partir del hecho ele que, en I-1, "las
reglas se encogen a medida que se aproximan a los bordes". Para demostrarlo, emplearemos los datos del inciso (2) del ejemplo 5.5, con el fin
ele calcular
ve= senh u.
Por lo tanto, V G > u para u
puntos conjugados.
>
O, y tenemos nuevamente que no hay
6.2 TEOREMA. Si y es un segmento geodésico desde p hasta q con la
propiedad de que no hay puntos conjugados de p = y (O) en y, entonces y
minimiza (estricta y) localmente la longitud de arco desde p hasta q.
Demostracilín. Sea x un mapeo polar geodésico en p, y rPstrinjamos
su dominio a la región E~ en la que
> O. Debido a que no hay puntos
conjugados de p en y, podemos poner y(u) = x(u, u0 ) para O< u< u 0 •
(Por lo tanto, admitimos la posibilidad u = O en esta ecuación, como es
habitual, aun cuando
= O allí.) A continuación, sea a otro segmento
de curTa desde p hasta q, donde ,a también está definida en el intervalo
[0, u 0 ]. A partir de aquí, nuestra demostración buscará apoyarse en el
hecho de que, si a está suficientemente cerca de y (en el sentido que ya
definimos), entonces podrmos expresar a como
e
e
a ( t)
=
x ( a 1 ( t) , a e( t) ) ,
y esta expresión se acerca tanto a la de y que
a 1 (0) =O,
(figura 7.27).
407
CURVATURA Y PUNTOS CONJUGADOS
V
(a¡, 112)
Figura 7.27
La demostración completa de esta afirmación ---que es bnstante plausible-- no tiene nada ele trivial. l'\o hay ningún problema en u = O, puesto
que podrmos reemplazar un segmento inicial corto de a por una geodésica
radial, y esto no nos quita generalidad, pues no se alarga a. Entonces,
a 1 y a 2 se construyen paso a paso, por medio del hecho ele que x es mapeo
regular y, en comecuencia, es localmente difeomorfismo.
Entonces, tenemos, así como sucedía en la demostración del teorema
3.6, que
L(a) = ¡uo
Jo
y a/ 2+-Ca/ 2 dt >
al(u 0 )
=
-
a1(0)
=
11 0
=
ruo
Jo
a/ dt
L(y)
1
y si L(n:) = L(y), entonces a es simplemente reparametrización ele y.
Aquí, nos dedicaremos a liberar la idea ele punto con jugado de la
dependencia de los mapeos polares geodésicos. Para ello, examinaremos
el "coeficiente de dispersión" y G desde cerca.
6.3 TEoREMA. Sea x un mapeo polar geodésico definido en una región
en la que
de Jacobi
e> O.
Entonces,
yG =
11 Xv 1!
sastiface la ecuación diferencial
(YG)"" + KyG =O,
somrtida a las condiciones iniciales
y G(O, v)
o
(YG)n(O,v)
La finalidad de la restricción G
ciabilidad de yG: Aquí tenemos a
vemos, en efecto, que
=
para todo v.
1
> O consiste
yG( u, v)
en asegurar h diferen-
bien definido para u
=
O;
yG(O, v) = 11 Xv(O, v) ll = O.
Sin embargo,
yC
no necesita ser diferenciable en u
taremos ( yG) "(0, v) y
(y-C) uu (0,
=
O, pues interpre-
v) como límites: por ejemplo,
408
LA GEOMETRÍA DE RIEMANN
Demostración. La validez de la ecuación de Jacobi se desprende inmediatamente del lema 6.3 del capítulo VI, puesto que, como se Ye en
el lema 5.4, E = 1 y F = O para x. Por lo tanto, gracJas a los comentarios
anteriores, 'erá suficiente que demostremos
(11 >O).
lím (yG)"(u,v)
u -~0
No es necesario que consideremos más que una sola geodésica radial
= x( u, v0 ) , para lo cual ponemos
y (u)
g(u)
=
y7J(u, Vo)
para u
> O.
De nueYo, puesto que E = 1 y F = O, obtenemos un campo de sistemas de
referencia
en y para u
> O.
Como ¡ es geodésica. F 1 es paralelo y, ¡;or el ejercicio 3 de la sección 4,
también lo es E c. Por paralelismo, E e está bien definido en u = O ( figura 7.28). Ahora bien,
l<,\(0)
=
X¡¿(0,v 0 )
=
COSVoel
+
Senv 0 e 2;
en consecuenCia,
Ademús, puesto que E 2 es paralelo y x,
=
gE" en y, obtenernos
en y para u
P = r(O)
Figura 7.28•
> O.
409
CURVATURA Y PUNTOS CONJUGADOS
Si tomamos límites cuando
u------?
O, obtenemos
Xm-(0, v0 ) = (límg' (u)) E 2 (0).
//-)()
Pero
Xu(O, v) = cos
11 e1
+sen v e 2
para todo v;
en consecuencia,
Xuv(O,
v0)
= -sen Vo e, + cos
V0
e 2 = E,(O).
Y es así como la última ecuación implica que lím,Ho g' (O)
lím ( y'~G) u(ll, 11 0 )
11
1: es decir,
1
--j()
1
para v 0 arbitraria.
En términos ele la dispersión de las geodésicas radiales, las condiciones
iniciales anteriores nos enseñan que, cuando salen primcramt:nte del polo p
en cualquier superficie geométrica, se dispersan a la misma tasa en que
lo hacen por el plano euclidiano E". Pues allí teníamos que
en consecuencia,
>/ G (0,
v) =
O,
yG
= u;
(y'G)u(O,v) =l.
Sin embargo, la ecuación de Jacobi, expresada como
(y'(})
uu
=
- f { y' G, nos enseña que, de allí en adelante, la tasa de dispersión dejJende
de la cUJT'atura gawsiana. Para K < O, las geodésicas radiales se dispersan más rájJidamente que las de E". (Observamos l"Sta anterioridad en
d plano hiperbólico.) Para K > O la tasa ele dispersión es menor que E 2
(como tenemos en la esft:ra) .
En particular, con el fin de localizar puntos conjugados, ya no t:s necesario que construyamos explícitamente mapeos polares geodésicos, como
hasta aquí lo habíamos hecho. Poclt:mos encontrar y'(j en una geodésica
y al resolver la ecuación de Jacobi en y, sometida a las condiciones dadas.
El teorema 6.3 implica explícitamente el resultado siguiente.
6.4 CmwLARIO. Sea y geodésica de rapidez unitaria que parte del
punto p en JI. Sea r; la solución única de b ecuación de Jacobi en y,
g"
+
K(y)g =O
tal que g(O) =O, g'(O) = l. Entonces, el primer punto conjugado de
y(O) = p en¡ (ele existir) es 1 (s 1 ), dondes, es el menor númno positivo tal qut: g(s 1 ) = Cl.
6.5 Ep:MPLO Puntos conjugados
11 Sea 1 una geodésica ck rapidez unitaria que parte dP nt;dquier
punto p ck la csfcr;t ::::: de radio r. Lt ecuación de J;tcobi de 1 C', por
tanto, e" +
= o, cuya solución general cst[t chda por
410
LA GEOMETRÍA DE RIEMANN
g ( s)
S
S
r
r
= A sen - + B cos --
.
Las condiciones iniciales g(O) =O, g'(O) = 1 resultan, rntonces, en g(s)
= r sen (s / r). El primer cero de esta función es que s1 > O ocurre en
h = r. Por lo tanto, el primer jJUnto conjugado de y (O) = p en y está
en el punto antÍjJoda de p. (Esto concucrd:c con nuestros cúlcuios anteriores de la esfera unitaria por medio ele m apeos pobres geodésicos.)
2) Sea y una p:crametrizZtción de rZtpidez unitaria del ecuador exterior
ele un toro de revolución T con radios R > r > O. Aquí, y es geodésica y
sabemos que, en y, K tiene el valor constante 1/r(R + r). En consecurncia, por el corolario 6.4, el primer punto conjugado y(s 1 ) ele y(O) = p
en y ocurrirá a exactamente la misma distancia s1 a lo largo de y que en
el caso de que y estuviera en una esfera con esta cun·atura K. De ello
se desprende que s1
= ;rVr(R + r).
6.6 CoROLARIO. No hay puntos conjugados en nmguna geodésica ele
una superficie con curvatura K < O. En consecuencia, todo segmento
geodésico de una superficie así es localmente minimizante.
Demostración. Apliquemos el corolario 6.4 a una geodésica y en Af.
Puesto que g(O) = O y g'(O) = 1, tenemos que g(s) >O para s >O, por
lo menos, hasta el primer punto conjugado (si existe). Pero K< O implica
que g" = - Kg > O, de manera que g' es función creciente; de hecho,
g' > l. En consecurncia, g (s) > s hasta el primer punto conjugado; pero
por esta misma razón, tal punto conjugado no puede existir. Del teorema
6.2 se desprende, entonces, el enunciado final.
1
Por ejemplo, en un cilindro circular C (K = O), la geodésica hclicoidal y
que va desde p hasta q -indicada en la figura 7.29- es, en efecto,
estable, como se verifica mediante el experimento directo. Aunque mini-
Figura 7.29
Figura 7.30
411
CURVATURA Y PUNTOS CONJUGADOS
miza localmente, no es, desde luego, minimizantc. El segmento de recta a
constituye evidentemente un camino considerablemente más corto para
u· desde p hasta q.
Para que el estudio de los puntos con jugados vaya mucho más lejos,
es necesario 2plicar el cálculo de variaciones (véase -:\lilnor [7]). Nosotros
nos limitaremos a citar un solo resultado, que viene a complementar el
teorema 6.2. En cuanto una geodésira y que parte de p pasa jJOr el primer
jJunto conjugado de p en y, ;;a no minimiza la longitud arco. Esto se ve
con bastante facilidad en una esfera ~. En la figura 7.30, la geod(:sica y
desde p hasta q es sólo un poco más brga que la prinwra distancia conjugada .,.r. Si el plano del gran círculo de ¡ gira ligeramrntc en rotación
alrededor de un ejt:' que pase por los extremos p y q, dejará en ~ un
segmento de curva a que, como se verific:1 analíticamente, es estrictamente
más corto que y. (Obscn-cmos que la única geodésica mús corta desde
p hasta q no es tú cerca de y.)
El teorema 6.3 también sirve para dar una descripción bastm1te intuitiva de la curvatura gaussiana en una superficie geométrica arbitraria.
6.7 LEMA. Si x es mapeo polar geodésico con polo p, entonces
(u> 0).
En todo lo que expondremos a continuación, o (u") nos denotará una
función ele u y v (u> O) tal que lím"_, 0 o( u") /u"= O. En la fórmula,
entonces, si u es suficicntemt:'ntc pequei1o, o ( u 3 ) resulta despreciable en
comparación con los dos primeros términos.
Demostración. Como antes. consideremos g(u) = y G (u, v) en una
geodésica radial y (u) = x( u, 1.'). Como solución de la ecuación de Jacobi
en y, g es difcn·nciable en u = O. Por tanto, tiene un desarrollo de Taylor
g(u)
=
g(O)
+
g'(O)u
+
g"(O)
u~
2
+
u3
g"'(O) -
6
+
o(u 3 ).
Las condiciones iniciales del corolario 6.4 son g (O) = O, g' (O) = 1; en
consecuencia, a partir de la ecuación ele Jacobi, obtenemos g" (O) = O.
Al diferenciar la ecuación de Jacobi, vemos qnc
g"'
+
K(y)'g
+
K(y)g' =O.
En consecuenCia,
g"'(O) = K(y(O) 1 = -K(pl.
Al hacer la substitución en el dt:'sarrollo de Taylor, obtenemos el resultado
que queríamos.
1
412
LA GEOMETRÍA DE RIEMANN
Figura 7.31
Supongamos que los habitantes de una superficie geom~trica jJ qulSlcran determinar la curvatura gaussiana de NI en un punto p. Al medir una
distancia pequelia E en todas las direcciones desde p, obtendrán una circunferencia polar ce de radio E.
Ahora bien, si J,;f = E", el perímetro de Ce es simplemente L (e") =
2"E. Pero, si K > O, las geodésicas radiales desde p no se dispersan con
esa rapidez, de manera que Ce deberá ser más corto que 2-;;-r: y si K< O,
se dispersan con más rapidrz, ele manera que e" ha de ser más largo
que 2-;;-E.
La relación entre J,( Ce) y K se puede medir con alguna precisión.
Para un E > o suficientemente pequCI'ío, ce queda paramctrizacla por
v ~ x (E, v), donde x es paramctrización polar geodésica en p. Por consiguiente,
En consecuencia, según el lema anterior,
Por lo tanto, si los observadores en "\1 miden J, (Ce) con mucho cuidado
para e pequeño, pueden determinar aproximadamente lo que Yalc·la curvatura gaussiana ele Af en p. Al tornar los límites, obtencr;1os el
6.8
CoROLARIO.
}{(pi=
lírn, __ ,,
(3/_,r::) (2-;;-r- L(CJ).
Es fácil hacer la prueba e],. la fórmula
) en una esfera ::S ele radio
r en E". Como se yc en la figura 7.31. la circunferencia polar C, con
centro en p es, Pn realicbcl, una circunferencia cuclidian:~ de raclio cuclicli:nw r sen 17. don ele 1'l = ri r. Por tzmto. :ocgím h serie ck Tay\or ele b
funcióu ~;t·no,
CURVATURA Y PUNTOS CONJUGADOS
413
con lo cual tenemos una demostraciún adicional de que ::::: tiene curvatura
gaussiana K = 1/r".
EJERCICIOS
1. Sea x la pararnetriz:1ción polar del plano hiperbólico dada en el
ejemplo 5.5. Dedúzcase y G (u, v) = senh u ele dos Il13YJC'ras diferentes:
al calcular x,. o x,. y al resolver la ecu:1ción de Jacobi.
2. Si ce es circunferencia polar alredC'dor de un punto p de lYf, diremos
qup la región que encierra
es el disco polar De de radio E.
a) Demuéstrese que el área dPl disco polar es
e,
y, en consecuenCia
b) Aplíquese esta fórmula para encontwr la curvatura gauss1ana de
una esfera de radio r.
3. En el origen O del plano hiperbólico, encuéntrese b longitud de la
circunferencia polar e,. y el área del disco polar DE (O< E< 2).
Dedúzcase de c;¡da resultado que K (O) = - l.
4. Sea j f una superficie 3unwntada de I'C\·olución (ejercicio 12 ele IV.l).
a) Si lvf se corta con A en un solo punto p (corno sucede en un
paraboloide dC' revolución), hágase ver q11e p carece ele puntos
conjugados en ninguna geodésica.
b) Si Af se corta con A en dos puntos, p y q (corno sucede en un
elipsoide ele revolución), hágase wr que p y q son puntos conjugados en toda gpocJésica que los una. (Indicación: El teorema 6.3
del capítulo V constituye una solución de la Pcuación de Jacobi.)
Los ejcrcicios siguientes se refieren a una variante útil de la p3r:l.nwtrización polar geocll>sic3 en la que el polo p se substituye por una cun·a
regular arbitraria.
5. Sea f3: I ---:> ,\1 una cun·a regular en Af, y sea X un campo vectorial
(no nulo) en j3 t:1l que (Y y X son linealrrwnt(' independientes en cada
punto. Definamos
x(u,v) = ")'X<rl(u);
414
LA GEOMETRÍA DE RIEMANN
x(u, v)
X
Figura 7.32
Figura 7.33
por tanto, las curvas u-parámetro de x son geodésicas que cortan a {3
con velocidades iniciales que están dadas por X (figura 7.32). Demuéstrese que:
a) x es mapeo en alguna región D que contiene al intervalo (0, v),
ven l.
b) Si escogemos adecuadamente {3 y X, esta parametrización x se
convierte en i) el mapeo identidad de E 2 (coordenadas naturales),
ii) la parametrización canónica ele una superficie de revolución, y
iii) una parametrización reglada de una superficie reglada (capítulo V, sección 5) .
6.
(Continuación). Si {3 es curva de rapidez unitaria y si X es la normal
unitaria N de {3 (sección 4), hágase ver que, para x: E= 1, F =O
y ,¡-e; es la solución de la ecuación de Jacobi ( ·Ie) uu
que
v'G(O, v)
=
1
y
( YG)u(O, v)
=
-K9
+
K yG = O tal
(v).
La elección natural de X en d ejemplo anterior significa que, en esta
parametrización, e tiene significado geométrico. Si e (U o, Va) = o, entonces, (por analogía con los puntos conjugados) decimos que x(u 0 , v 0 ) es
]Junto focal de {3 a lo largo de la geodésica normal v = v 0 • Aquí, los rayos
de luz que emergieran ortogonalmente de {3 tenderían a encontrarse ( figura 7.33).
.'\IAPEOS QUE CON SERVAN LOS PRODUCTOS INTERIORES
415
7. a) Si {3 es una circunferencia de latitud en una esfera ::S, hágase ver
que los polos norte y sur de ::S son los únicos puntos focales de (3.
b) Si {3 es una curva del plano euclidiano, hágase ver que sus puntos
focales son exactamente sus centros ele curvatura: es decir, los
puntos de su evoluta. !Vt'ase el ejercicio 15 de II.4.)
7
Mapeos que conservan los productos interiores
Ya vimos que una i~ometría local F: Af ----'> N transf orrna las geodésicas ele
N. Por medio de la notación yv de la geodésica con velocidad inicial v
podremos ser más explícitos.
7.1 LEMA. Si F: Af----'> N es isometría local y sr v es un vector tangente a Af en p, entonces
F(y,) =
{P
(V)
Demostración. De acuerdo con el comentario anterior,
geodésica de N. Su wlociclad inicial es el vector tangente
y=
F ( Yv) es
a l\' en F ( p) . Por tanto, gracias a la unicidad de las geodésicas ( tcorerna 4.3), y es precisamente /'F.:,(rl.
Por consiguiente, una isometría local queda completamente determinada por su efecto en un solo sistema de referencia.
1
e
7.2 TEOREMA. Sean F y
isometrías locales de M a N. Si tenemos,
para un sistema de referencia e 1 , e" en un punto p de J.vf, que
entonces F = G.
Demostración. Si Af es geodésicamente completa, la demostración resulta particularmente fácil. Si q es punto arbitrario de Af, entonces, según
el teorema 5.9, existe un vector ven el punto especial p tal que yv(r) = q.
A partir ele la hipótesis acerca de F, y e*, deducimos, por linealidad, que
F.,, y e* concuerdan en v = c 1 e 1 + ccec. Por tanto, el lema anterior nos
enseña que
F(y,) = {P.(v) = {G (v) = e(y,.).
Por consiguiente, en particular, se verifica que
F(q) = F(y,(r)) = e(y,(r))
para todos los puntos q de Af.
e(q)
416
LA GEOMETRÍA DE RIEMANN
La demostración en el caso en que Af es cualquiera es un refinamiento
de la anterior. A partir del lema 5.3, es posible obtcnPr una geodésica
quebrada f3 desde p hasta q y deducir que F(/]) = G((J) por medio de
la argumentación anterior aplicada a cada sqnnento no quebrado ele [3.
1
A continuación, utilizaremos el hecho de que las i'>omctrías locales
consen·an las geodésicas para construir algunas isometrías locales. Nuestro
fin es exhibir el parecido de familia que cxistP entre las :-.upcrficie~'i geométricas de la misma cun·atura const;mtc. Dado cualquier número K, hay
una superficie geo!llétrica particularmente simple Af (K) cuya curvatura
gaussiana tiene el \·alor constante K.
1) Si K> O, sea Af(K) la esfera ::S de la cmyatura K (y, en consecuencia, ele radio 11 .Y7[).
2) Si K= O, sea Af(K) el pbno euclidiano E".
3) Si K< O, sea M(K) el plano hiperbólico If ck curvatura K (y.
en consecuencia, ele pseudorraclio 11 y - /{: véase el ejercicio 4 de la
sección 2).
Diremos que ,\l(K) es la suj)(?rficie geomhrica estándar de curvatura
constantr K. Por supuesto, hay muchas otras superficies de cun·atura constante: se distinguen por el hecho de ser geodé:,icamentc completas y simplemente conexas (pág. 204).
7.3 TEOREMA. Sea N una superficie geornetnca geodésicamente completa con curvatura gaussiana constante K. Entonces existe una isomctría
local F de la superficie estándar Af (K) sobre N.
El primer mapeo del ejemplo 4.6 del capítulo VI es uno ele los casos
ele este teorema, como también lo es la isometría local (ejercicio 6 de la
sección 2) de una esfera sobre un plano proyecti\·o.
Demostración. Fl caso en r¡ue ]{ <O. Usaremos el lenguaje del ejemplo 2 .4, donde K = - l. C n simple cambio de escala (ejercicio 4 de la
sección 2) resueh-e el caso en que K< O es arbitraria. Corno teníamos
en el inciso 2 del ejemplo :l.S, sea p el origen ele 1\f = ,\f (- 1), con
e,= [',(p) y e"= UdpJ. Sea e,, e" un sistema ele referencia en un
punto cualquiera de N. Y, a continuación, sean x y x los mapc9s polares
geodésicos que resultan dt' ll y N.
Acerca de la superficie S, afirmaremos que
1) x está definido en todo el semi plano derecho S: u > O (como consecuencia de la completitud geodésica).
2) Su inwgcn x(S) cubre la totalidad dt' N, con la excepción posible
del polo p (como consecuencia del teorema :).~) y ele la definición de los
mapeos polares geodésicos).
MAPEOS QUE CONSERVAN LOS PRODUCTOS INTERIORES
417
3) :X: S-'? N es mapeo regular. (Por el lema 5.4, E= 1 y F =O,
pero ya hemos hecho notar que la ecuación de Jacobi para K = -1 nos
senh u, de manera que EG - F2 = senh 2 u > O en S.)
Así, este resultado general es válido para x: S-'? H también, pero aquí
sabemos más. Por el ejemplo 5.5, toda la superficie H es wcindad normal
del polo p: por tanto, x sólo tiene las ambigüedades habituales de las
coordenadas polares; la ecuación x (u, v) = q determina c!P mant'ra única
a u, y a v de manera única, con la excepción de la adición de algún
múltiplo de 2r. ( q =/= p). Gracias a esta información adicional, concluimos
que la fórmula
da
yG =
F(x(u,v) =
x(u,v)
es consistente, de manera que define un mapeo polar F de H sobre la
totalidad de N.
(Para demostrar la cliferenciabiliclacl de F en el
recurrir, corno hacíamos en la demostración del lema
y y y que corresponden a x y x). Se ve con facilidad
local por medio del criterio del lema 4.5 del capítulo
acuerdo con 3, tenemos que
E= 1 =E,
F =O= F,
G = senh 2 u = G
polo p, hemos de
5.3, a los mapeos
que F es isornetría
VI. En efecto, de
para
u> O,
y, en el polo p, la conservación de los productos interiores es consecuencia
honesta de la continuidad.
El caso en que K = O. En esto, la argumentación es una copia literal
de la anterior, con la excepción ele que
M(K) = E 2
y
G = G = u 2•
El caso en que K > O. Aquí requerimos de una idea nueva, pues la
mayor vecindad normal 'JZ de un punto p ele la esfera ::S = M (K) no es
la totalidad ele ::S: se omite el punto antípoda, -p.
Al argumentar de la manera en que se hizo para el caso K < O, obtenemos una isometría local F,: JL-'? N. Ahora repetimos este argumento
una vez más en un punto p''' en difPrente ::::: para ambos p y -p. Obtenemos una isometría local F 2 : ~]]"'--'?N, donde 'JI" PS la totalidád de ::S
menos -p. Los sistemas ele referencia que determinan a F 2 se eligen
ele manera que los mapas ele derivadas de F, y F 2 concuerden en p. Por
tanto, según el teorema 7.2, F, y F 2 son idénticas en la región traslapada
de 'JI y 'Jl"'. Pero 'J2 y 'JI"' cubren la totalidad de la esfera :S, de manera
que F 1 y F 2 constituyen entre ambos una sola isometría local F: ::S--'? N.
Puesto que ::S es compacta y N es conexa, el ejercicio 6 de la sección 7
del capítulo IV nos enseña que F transforma a ~ en la totalidad de M.
1
418
LA GEOMETRÍA DE RIEMANN
Una isometría F: M___,. M de una superficie geométrica a sí m1sma se
puede considerar como simetría de J1. Todas las características de la
geometría ele J!,f son iguales en cada punto p que en F(p), puesto que
esta geometría se compone de invariantes isornétricas. Los re~mltados del
ejercicio 9 de la sección 4· del capítulo VI nos hacen ver de inmediato que
el con junto !f (M) de todas las isometrías F: J!,f ___,. j1 forma un grupo,
así como el con junto de todas las isometrías del espacio euclidiano ( ejercicio 7 de la sección 1 del capítulo III). Decimos que !f (ld) e~ el grupo
de isometrías de .M.
Este grupo !f pi) es, por supuesto, inlrÍnseco a A1, y cuando Ai es
superficie en E\ no se le debe confundir con los grupos cf (Af) de simetrías
euclidianas de Af (ejercicio 7 de la sección B del capítulo VI). Una simetría euclidiana F de A1 e E 1 es una isometría ele E 3 con la propiedad de que
F (Af) = M; existe cuando la forma de A1 en E 3 es simétrica en el sentido
ordinario que tiene esta palabra. Cada 'imctría euclidiana F de J1 da
lugar a una isomctría F J Af: },1 ___,. A1, pero, en general, este proceso no
nos da todas las isometrías de M e E" (ejercicio 9).
En una superficie geométrica arbitraria Jf, el grupo de isometrías
!f (M) da una descripción algebraica de Af que es novedosa. En términos
poco precisos, a medida que M es más simétrica, tenernos que !f (Af) es
mayor. Aunque no vamos a efectuar la demostración, pondremos el ejemplo
del elipsoide
(a>ú>cJ
que posee exactamente ocho elementos en su grupo de isomctría, y todos
ellos provienen de sus simetrías euclidianas, ele la manera que describimos
antes: tres reflexiones (una en cada plano de coordenadas), tres rotaciones de 180° (una alrededor de cada eje de coordenadas), la isornctría
p ___,. - p y, por supuesto, el mapeo identidad de .H.
El menor grupo de isometrías posible ,fj (M) ocurre cuando el mapeo
identidad de Af es la única isometría de }vf. Podernos producir una superficie geométrica así si le ponemos un chichón al elipsoide, de manera que
se destruyan sus siete isometrías no triviales.
En cambio, una superficie geométrica lvf tiene~ la mayor simetría posible cuando existe toda isometrb posible de las que permite el teorema 7 .2.
Es decir, si tenemos sistemas de referencia C¡, Ce y e,, e2 en dos puntos
cualesquiera de Af, existe una isometría F: Ai-> A1 tal que
Cuando esto suceda, diremos que A1 es homogénea con respecto a los
sistemas de referencia; dos sistemas de referencia cualesquiera t:n Af están
simétricamente ubicados.
MAPEOS QUE CONSERVAN LOS PRODUCTOS INTERIORES
419
-------e
~~
------
Figuro! 7.34
Por tanto, lo que demostramos en el teon·ma 2.3 del capítulo I li es
que E" es homogéneo con respecto a los sistPmas dr referencia, y b misma
rlPmostrZJrión se rumple para En a;·bitrarios y, en particular, par:1 E 0 • En
los ejercicios ele esta sección, veremos que todn sujJerfirie estándar JI(K)
de curvatura constante es homogénea con respecto a los sistemas de referencia.
7.4 DEFINICIÓ:-¡. Una superficie geométrica A1 es homogénea en Jmntos (o simplemente hmno[!.énea) cuando dos puntos cualesquiera p y q
clf' M hay una isometría F: M__.,. A1 tal que F ( p) = q.
Una superficie homogénea con respecto a los sistemas ele refrrencia
es, por supuesto, homogénea, pero lo contrario no es cierto. Un cilindro
circular C en E 3 nos da un ejemplo de ello. De hecho, si F es una rotación
ele E 3 alrededor del eje de C, o una trasbción de E3 a lo brgo de este
eje, entonces F transforma C en C, ele manera que produce una isometría
de C. En consecuencia, dados puntos cualesquiera p y q de C, podemos
ltaccr una rotación para poner p en p, que está en el mismo rayo de q,
pZ~ra, Z1 continuación, trasbdar p a q. La composición de estas dos isometrías es una isometrb que tr:-tnsforma a p en q. Por otra pZ~rte, C no es
homogéuea con respecto a los sistemas de referencia: todos sus pw:tos son
geornélrieamcnte equivalentes, pero no todos sus sistemas de referencia.
(Demostración: En los vectores unitarios que vernos en la figura. 7 .34·, no
ha;.' ninguna isometrÍa capaz de transformar Ct en C1 , pues, por el lema 7.1,
F tendría que tr:-tmJormar la gcoclésicZ~ uno a uno Yc, en la geodésica
pe'' óclica y r 1 : esto es impo:·;ible, puesto qul' F es uno a uno.)
f ,a homogeneidad es una restricción muy fuerte.
lv1
7.5 TEOREMA. Si una superficie geomélrica M es homogénea, entonces
geodésicamente completa y tiene curvatura gaussiZ~na constante.
C'S
420
LA GEOMETRÍA DE RIEMANN
a' (lo)
u
0.
F('.JL)
Figura 7.35
Demostración. La constancia de la curvatura es consecuencia de la
definición de homogeneidad y del hecho de que las isometrías consrrvan
la curvatura. La demostración de completitud es más interesante. Si A1 no
es geodésicamente completa, hay una geodésica máxima ele rapidez unitaria
a que se define solamente en el intervalo 1, que caracterizaremos concretamente como 1: t
a, que no es la totalidad de la recta real. Verificaremos la imposibilidad de esto. Por el lema 5.3, todas las geodésicas que
emanan de un punto arbitrario p de Al recorren por lo menos una distancia fija e > O. Tomemos tu en 1, con la propiedad de que a - 10 < c/2.
Puesto que Af es homogénea, existe una isometría F: Ji--'> 1\1 tal que
F(p) = a(t 0 ). Ahora bien, sucede que, para algún vector unitario u en
p, F,.(u) = a'(t 0 ). Por tanto, el segmento geodésico F(yu) tiene la velocidad inicial
<
y recorre una distancia e con rapidez unitaria (figura 7.35). Pero, entonces, un cambio ele parametrización nos permite aplicar el teorema 4.3
con el objeto de definir a en el intervalo
t
to + E. Pero lo + E
a,
ele manera que aquí se ha contradicho la maximalidad del intervalo I, y
con ello se demuestra que Al es geodésicamente completa.
r: <
>
1
Como nos lo sugiere el título ele esta sección, las isometrías (locales)
no son los únicos mapeos importantes en la geometría que conservan el
producto interior. Vamos a ver brevemente los otros tipos principales.
7.6 DEFINICIÓN. Sea F: A1--'> E' un mapco de una suprrfici,· geométrica hacia E''. Si el mapa de derivadas F,, consnva el pnxlu~·to interior
de vectores tangentes, entonces F es una inmersión ismn/írica. Si F es,
además, uno a uno, entonces F es una inyección isomhrica. Cna inyección
isométrica F tal que la íunción inversa F- 1 : F(Al) ~ Jf es continua se
llama jnopia.
Esta definición es indebidamente prohibitiYa. Es evidente que podernos
quitar E 3 -o incluso M- y poner en su lugar cualquier variedad de
Riernann (pág. 354).
MAPEOS QUE CONSERVAN LOS PRODUCTOS INTERIORES
421
Si F: M~ E 3 es inyección isométrica propia de una superficie geométrica en E 3 , entonces la imagen F(M) es superficie en E 3 y la
función F: M -e> F(M) es una isometría.
7.7
LEMA.
Demostración. Si x: D -e> A1 es carta propia dentro de .A1, entonces el
mapeo compuesto F(x): D ~ E 3 es una carta que descansa en F(M).
Además, F(x) es carta propia. De hecho, su función inversa F(x.(D)) -e> D
es simplemente x- 1 F-r, que es continua, pues x- 1 y F- 1 son continuas
también. Por tanto, podemos comprobar con facilidad la definición 1.2 del
capítulo IV. Ahora bien, como superficie geométrica, F(A1) emplea el
producto escalar de E", y, por definición, F: NI--:> E" conserva los productos interiores.
1
Es así como vemos que el estudio de la geometría de las superficies
de E" es exactamente igual al estudio ele inyecciones isométricas propias de
superficies geométricas en E 3 . Este resultado bastante técnico es importante sólo porque nos sugiere una generalización considerable del trabajo
que hicimos en los capítulos V y VI. Bien podríamos haber estudiado allí
la clase -mucho más grande- de las inmersiones isométricas en E 3 , haciendo a un lado las restricciones de propiedad e inyectividad. En esto no
hay dificultad real alguna, como no sean las complicaciones de notación.
Como teníamos en el caso especial que explicamos en la página 354,
la imagen F(.A1) de una inmersión isométrica F: .A1 ~ E 3 puede cortarse
a sí misma; de cualquier modo, pensaremos en ella corno una especie de superficie defectuosa en E 3 • Si definirnos el operador de forma de una
su jJerficie inmersa de ésas, por lo menos nos daremos una idea de la
manera en que se puede generalizar el resto de los capítulos V y VI.
Puesto que se conservan los productos intniorcs, una inmersión isométrica F es regular. Por consiguiente, F,, ( T 11 ( .H) ) es subespacio bidimensional de TP(p) (E 3 ) ; desempeña el papel de plano tangente para F(JH)
en F ( p) . U na función normal unitaria U asigna a cada punto p (en una
región de .A1) un vector unitario ortogonal a F,,(Tv(A1)). Si a es curva
en ;\1, entonces Ua es un campo vectorial en F(o:) en E". EntoncPs, si Y
es la \Tlociclacl inicial de o:, definimos S(v) como el vector único en
T¡¡(M) con la propiedad de que
F: (S (V) )
=
-
U a 1 ( Ü)
Este operador de forma S es nuevamente un operador lineal simétrico
en T 11 (lo,1).
La mayor parte ele nuPstros resultados anteriores se cumplen bastante
bien en la generalización. Por ejemplo, si la curvn tura gaussiana K ele Al
se define intrínsecamente, como se hizo en la sección 2, entonces, mediante
422
LA GEOMETRÍA DE RIEMANN
una reorganización de las cuestiones lógicas del capítulo VI, sección 2,
podemos hacer ver que K= det S.
Un teorema corno el teorema 3.7 del capítulo VI resultará ser más
informativo: Si M es superficie compacta con curvatura constante K (>O)
y si F: "H--+ E" es _inmersión isométrica, entonces F es isometría de M
en a una esfera euclidiana ~ de radio 1j y K en E 3 •
Dicho de otra manera: aunque permitamos que F(A1) se corte a sí
misma, esto no podrá suceder: F(M) sólo puede ser una esfera ordinaria
y redonda en E".
Hemos Yisto que hay superficies geométricas A1 que no pueden ser
inyectadas isométricamente en E 3 ; ejemplos de esto son el toro llano
(ejemplo 2.5) o el plano proyectivo del ejercicio 6 de la sección 2. En
este caso, resulla natural que intentemos inyectar i\1 en un espacio euclidiano E" de mayor dimensión. A medida que n crece, esta tarea se vuelve
menos difícil. (Dicho sin demasiada precisión, al tener mús dimensiones
por bs que 1H se puede curvar, crece la posibilidad de que encontremos
una forma para l'v1 que resulte compatible con la geometría intrínseca que
posee. Véase el capítulo VI, sección 9.)
Por tanto, aunque los toros llanos no se encuentran en E 3 , los podemos
encontrar en E 4 •
7.8 EJEMPLO. La inj'ección isométrica de un toro llano en E'. Partiremos de mapeo :X: E 2 --+ E 4 tal que
x(u,v) = (cosu,senu,cosv,senv)
Si x es parametrización del toro llano T que vimos en el ejemplo 2.5,
entonces la fórmula
F(x(u,v)) = x(u,v)
Es consistente; en realidad, nos define un mapeo uno a uno F: T-¿ E 4 •
Esto se demuestra si obscryamos que
x(u, v)
=
x(u1, v1 ) (=) 11 1 =u+ 2r.m, v1
= v
+
Si Icemos las flechas de implicación de
consistencia que buscábamos; la otra
uno a uno.
Entonces, F es inyección isométrica
interiores. De la manera acostumbrada,
2r.n(=)x(u, v) = x(u 1 ,v1).
izquierda a derecha, obtenemos la
dirección nos enseiía que F es
cuando F* conscrYa los productos
calculemos
Xu
= (-sen u, cos u, O, O)
Xv
=
(0,0, -senv,cosv).
E 11 consccuenna,
E= 1,
F =O,
G=l.
423
MAPEOS QUE CONSERVAN LOS PRODUCTOS INTERIORES
Estas funciones concuerdan con E, F y G para x, de manera que, s1 empleamos la misma argumentación con que demostramos el lema 4.5 del
capítulo VI, veremos que F,, conserva los productos interiores.
La situación general de aquí no se ha entendido bien. Aunque toda
superficie geométrica compacta se puede inyectar isoJ!létric~~ 17 ,
nos queda la posibilidad ele que podamos suh,tituir el !7 P9f,ir&~~l~'
tan p:·quelía romo +
.· · :• .·
"'t,. ~.¡;.~\
4\) ':r\\
'!~>~,~Y
JI')
EJERCICIOS
~ N una isometrb local, y supongamos que A1 -es-· gc~dé­
sicamente completa. Demuéstrese que F es sobre si y sólo si N es
1 . Sea F: l\1
geodésicamente cornpleta.i'
2. Demuéstrese que una superficie geométrica geodésicamente completa
con CU!Tatura constante y positiva es compacta. (Este resultado tambien se cumple cuando simplemente K 2: e >O. Véase el teorema
de .:VIyers en la obra ele Hicks [S].)
3. Supongamos que en k! podamos unir dos puntos cualesquiera mediante por lo menos una geodésica, y que en N se puedan unir dos
puntos mediante no más de una geodésica. Demuéstrese que toda
isorrwtría local F: A!~ N de esas superficies será uno a uno.
4. Sea F: M-> A! una isomctría distinta del m apeo iclenticbcl. Si se
Íija una curva de rapidez unitaria bajo F, es decir, SI
F(o:(s)) = a(s)
para todo
s,
hágase ver que a es geodésica ele jf.
5. Sean x y x parametrizaciones polares geodésicas de las vecindades
normales
y
':.lle (con el mismo valor de e) en dos superficies
geométrica>. Si J{(x)
muéstrese que
JlE
y
=
J{(x) en el dominio común st de
X
y x, de-
'JZ, son isométricas.
6. Demuéstrese que la esfera :S y el plano hi pcrbólico H son homogéneos
con respecto a los sistemas ele referencia. ( lndicaci0n: Declúzcanse
en :S las isometrías que se requieren a partir de transformaciones
ortogonales de E"; en JI, aplíquese el teorema 7.3 y uno ele los ejercicios anteriores.)
t Auncptc la tlcrnostración no e.;; c\--r1lc:ttal, :;r sabe que las dos prupic<ladcs
son consccu('~1cia de la cornplc titt:cl gcodésic;1 Jc ..\f.
424
LA GEOMETRÍA DE RIEMANN
7. Demuéstrese que el toro llano es homogéneo, aunque no es homogéneo con respecto a los sistemas de referencia, y que un toro de revolución ordinario en E 3 no es homogéneo.
8. Demuéstrese que:
a) En el cilindro circular recto
F: e-? e es de la forma
F (p)
=
e:
x2
+ y2
r2 en E 3 • toda isometría
(p 1 cos {} -+-Pe sen{}, p 1 sen{} -+- Pz cos {},e PJ
+
a)
donde E = -+- l.
b) Toda isometría ele una esfera o ele un cilindro circular recto en
E;3 es la restricción de una isometría de E:3 •
9. Sea A1 el cilindro en E'3 cuya curva de sección transversal es la elipse
4x" + y" = 4. (Podríamos cmplPar cualquier otra curva cerrada y
no circular.) Demuéstn·se que existe una isomctría de Al que no
es rPstricción de una isomctría dP. E". (1 ndicaciórz: Paramctríccse
M mediante x(u, u) = ,ct(u) + vU;;, donde a es una pararnetrización
periódica y de rapidez unitaria de la elipse.)
1O. En la esfera ~ de radio r, sea T un triángulo cuyos lados son segmentos
geodésicos de longitudes a, b y e (todos menores que "r). Sea {} el
ángulo ele T en el vértice p que se opone al lado a.
a) Dcmuóstrese la ley ele los cosenos:
a
cosr
=
cos
b
e
cosr
r
+
sen
b
r
sen
r
e
cos {}.
b) Hágase ver que esta fórmula se aproxima a la ley habitual euclidiana con los cosenos cuando el valor de r es grande en comparación con a, b, c.
(1ndieaciún: Con el objeto de determinar cos {} encuéntrense
vectores unitarios ub, Uc en p, tangentes a los lados b y c.)
11. Demuéstrese que el plano proyccti\·o (ejercicio 6 de la sección 2)
es homogéneo con respecto a los sistemas ele referencia. (1ndieaciún: Si F: :S---+ :S es una isometría de la esfera :S C E" ·entonces
F (- p) = - F ( p) ; en consecuencia, hay un m apeo F: :S -? :S tal
que PF = FP.)
12. Demuéstrese que los grupos ele isomctrías ele bs superficies isométricas
son isomorfos.
13. Si 1H es superficie en E'1 que no descansa en un plano, húgase \·cr que
la función F---+ F Al es isomorfismo del grupo euclidiano ele simetrías cJ (M) a un subgru po ele isornetrías e 0 ( ,H) .
1.
425
MAPEOS QUE CONSERVAN LOS PRODUCTOS INTERIORES
Se pueden construir explícitamente isometrías del plano hiperbólico
si se reconoce un punto del plano como número complejo
z
u
=
+
iv = (u, v),
y se aplican los ejercicios de la sección l. Por tanto, s1
la magnitud de z, tenemos
1
z
1 "
1
z
1
nos denota
= zz = u" + v",
<
y es posible describir el plano hiperbólico como el disco 1 z 1
2, con la
estructura geométrica conforme que vimos en el ejemplo 1.3, dada por
g(z) = 1 14.
1
z
1
2
/4.
(Traslación del plano hiperbólico.) Para un número real fijo e= (e, O)
en H, sea T el mapeo T(z) = 4[(z + c)/(cz + 4)] definido en If.
a) Hágase ver que T(H) C H y que T: l! ---'?1-f es uno a uno y
sobre.
Si denotamos con H' el mismo disco, z < 2, pero con la estructura
euclidiana habitual; el ejercicio 7 de la sección 1 nos enseña que
T: H'---'?1-f' es mapeo conforme con escala ,\(z) = dT/dz:.
b) Verifíquese que la escala es
1
1,
1
,\(z)
4- c 2
-lcz + 412
.
= 4--~
e) Declúzcase que T: H---'? H es isometría del plano hiperbólico.
(Indicación: Aplíquese el ejercicio 9 ele VII.l.)
Estos métodos sirven para verificar que H es homogéneo con
respecto a los sistemas de referencia y ~-si vamos un poco más lejospara hacer una deducción elegante de las geodésicas de H.
15. (El semijJlano de Poincaré P es isométrico al plano hijJerbólico 11.)
En términos de números complejos, P es el semi plano Irn z > () con
la estructura geométrica conforme g(z) = Im z. (Im z es la parte
imaginaria v de z = u + iv.) Sea F el mapeo
+ 2i
iz+:Z'
z
F(z) -
definido en H. Hágase ver que
a) IrnF(z) = (4- /zi"J/:iz+21 2 •
b) F cs mapco uno a uno de H sobre P. (Calcúlese explícitamente
p-1.)
e) En relación con las estructuras euclidianas. F es conforme, con
factor escalar ,\(z) = 4/ i iz + 2.]".
426
LA GEOMETRÍA DE RIEMANN
d) F: H --7 P es isometría.
Hágase un bosquejo de H y P e indíquense las imágenes en P de cada
uno de los cuatro cuadrantes de H.
8
El teorema de Gauss-Bonnet
Hemos visto que la curvatura gaussiana K ele una superficie geométrica
M tiene fuerte influencia en las otras características geométricas de M,
como son la traslación paralela, las geodésicas, las isometrías y, desde
luego, la forma de M si se tiene que está en E". A continuación, veremos
que la influencia de la curvatura gaussiana penetra hasta la conformación
topológica más esencial y definitiva de A1: las propiedades completamente
independientes de la estructura geométrica particular de lvf.
El paso principal de esta demostración será un teorema que relaciona
la curvatura total de un 2-segmento con la cantidad total ele flexión ele su
frontera.
En una curva arbitraria a en M, la curvatura geodésica nos dice cuál
es su tasa de flexión en relación con la longitud de arco. Por tanto, para
encontrar la cantidad total de flexión ele a, vamos a integrar con respecto
a la longitud de arco.
8.1 DEFINICIÓN. Sea tY: [a,b]--7M un segmento regular de curva en
una superficie geométrica orientada Af. La curvatura geodésica total
J" K11 ds
de a es
S(Ú)
J
Kg(s) ds
s(a)
donde Kg ( s) es la curvatura geodésica de una reparametrización ele rapidez
unitaria de a.
La curvatura geodésica total de a en Af es, por tanto, la analogía de la
curvatura gaussiana total de una superficie en E". Por ejemplo, sea e
una circunferencia de radio r en E 0 , donde E" tiene la orientación natural.
Si a es una curva que hace un viaje en el sentido opuesto al de las manecillas del reloj en e, entonces a tiene la curvatura geodésica ·constante
Kg = 1/ r. Por tanto,
al margen del tamaño de la circunferencia. La curvatura total de un
viaje en el sentido de las manecillas del relo.i será dP - 277", pues, en grnl'ral,
si la orientación de AJ se mantiene fija, entonces la curvatura geodésica
total de un segmento de cuJYa a no se ve afectada por una reparamctri-
427
EL TEOREMA DE GAUSS-BONNET
zacwn que conserve la orientación, pero cambia de signo en una reparametrización que invierte la orientación. (Lo primero es consecuencia clara
de la definición; lo segundo se deduce, por ejemplo, del lema siguiente.)
8.2 LEMA. Sea a: [a, b] -:.k! un segmento regular de curva en una región de M orientada por un campo de sistemas de referencia E 1 , E 2 •
Entonces,
L
ds
Kg
= '? ( b)
-
+
<p (a)
L
(/)12
donde <p es una función angular desde E 1 hasta a' en a, y
de conexión que corresponde a E 1 , E 2 •
w 10
es la forma
Demostración. Ninguno de los términos se ve afectado por reparametrizaciones que conservan la orientnción; por tanto, podemos suponer
que a es una curva de rapidez unitaria. Pero, entonces, el resultado se
desprende inmediatamente al integrar la fórmula del lema 4.5.
1
En la teoría de integración del capítulo VI, sección 7, usábamos 2-segmentos x: R ~ A1 que eran uno a uno y regulares en el interior R 0 de
R. A continuación, vamos a imponer el requisito más exigente de que x
sea uno a uno y regular en la frontera de R también. (Esto equivale a decir
que x: R ~ M es la restricción a R de una carta definida en algún
intervalo abierto que contenga a R.)
Cuando x es un 2-segmento regular y uno a uno, sus curvas de arista
a, {3, y, a (definición 6.4 del capítulo IV) son uno a uno, regulares, y
pensaremos en la frontera {)x = a + f3 - y - a como si fuera una sola
curva quebrada que encierra la región rectangular x(R). A continuación,
nos propondremos definir la curvatura geodésica total de ox. La definición
de curvatura geodésica nos dice que la curvatura geodésica total es simplemente el ángulo total que su tangente unitaria T recorre (con respecto
a la longitud de arco). Pero para recorrer la totalidad de
ox
=
a
+ f3 -
a
y -
no tendremos solamente que obtener las flexiones totales de las aristas,
que son
f
, ux
Ku
ds
J
= J
=
Kg
a
Kg
Jp
ds
+
ds
+\
a
,,
Kg
Kg
/3
ds
+1
lfs -
Kg
j -y
~
Jy
ds
K(!
+1
ds -
J-6
K 11
~
.l5
ds
Kg
ds
sino también los ángulos que tendría que recorrer una tangente unitaria
Ten ax en las cuatro esql'inas ele la región rectangular x(R) (figura 7.37).
428
LA GEOMETRÍA DE RIEMANN
Figura 7.36
Figura 7.37
Para
R: a< u< b,
estas "esquinas"
p1=x(a,c),
P2 = x(b, e),
p3 = x(b, d),
p4 = x(a, d)
se llaman vértices de x(R).
En general, si un segmento regular de curva a en una región orientada
termina en d punto en que otro segmento f3 empieza, digamos concretamente a(1) = {3(0), entoncPs el ángulo de flexión e desde a hasta f3
es el úngulo orientado desde a' ( 1) hasta f3' (O), que sea menor en valor
absoluto (figura 7.36). En un 2-segmento, usamos la orientación determinada por x, es decir, la forma de área dA1 tal que dkf ( x,, x,,) > O,
para establecer una tPrminología con que estemos familiarizados en el caso
de un polígono del plano.
8.3 DEFINICIÓN. Sea x: R-'> A1 un 2-segmento regular y uno a uno,
con vértices p 1, p 2 , p.,, p.1 • El cálculo exterior E¡ de x en p¡ (1 < j < 4)
es el Úngulo de flexión pn p¡ derivado de las curvas de arista a, {3, -y, -8,
a, · · · en el ordPn en que ocurren en ()x. El ángulo interior t¡ de x en p¡
es " - e¡ (figura 7.37).
Al dar esta definición, pensamos en aplicaciones más generales; en
el caso que tenemos, los ángulos exteri(jres se expresan con facilidad en
429
EL TEOREMA DE GAUSS-BONNET
1
{3 =
'.
Xv
.:.
x ..
Figura 7.38
términos del ángulo habitual de coordenadas desde
por medio de
Xu
hasta
f.!
Xr
=
(O
< {} < ")
{J.,
donde {}i es el ángulo de coordenadas en el vértice Pi· Por ejemplo, consideremos la situación en p", como se exhibe en la figura 7.38. Por la
definición de las curvas de arista, J3' es Xv, pero ( -y)' es - x,, puesto
que -y es una reparametrización de y que invierte la orientación. Por
consiguiente, e3 + {} 3 = 7f. (Las demostraciones analíticas pueden partir de
la definición de ángulo orientado que dimos en la sección 7 del capítulo VI.)
Aquí ya nos encontramos preparados para demostrar el resultado fundamental de esta sección.
8.4 TEOREMA. Sea x: R---'? lvf un 2-segrncnto regular y uno a uno en
una superficie geométrica Af. Si dlvf es la forma de área en x(R.) determinada por x, entonces,
~
curvatura gauss1ana
total dC' x
'-
curvatura geodésica
tot:d de (x.
(La curva geodésica y los ángulos exteriores aplican la oril'ntación de
x(R) dada por dAf, donde d}vf(x,, x,.) >O. Observemos que no es necesario que la misma Af está orientada; ni siquiera que sea orientable.)
Este resultado se llama fórmula de Gauss-Bonnet con ángulos exteriores. Puesto que E i = " - Li para 1 < j < 4, la fórmula se puede expresar
como
430
LA GEOMETRÍA DE RIEMANN
JJx K dm + Ix
Kg
ds = (t 1
+ "" +
¡3
+
¡4)
-
2r.
en términos de los ángulos interiores de x (R) .
Demostración. Sea E 1 = xu/ -{E en la región x(R). A continuación,
sea E~ el campo vectorial único con la propiedad ele que "t" 1 , E 2 es campo
de sistemas ele referencia con dA1 ( E 1 , E 2 ) = + l. En este caso (compárese
esto con la página 334), la segunda ecuación estructural se con~ierte en
dw 12 = -KD 1
A
8 2 = -K d1H
La potencia de esta demostración se basa en el teorema de Stokes
(6.5 del capítulo IV), que nos da
'6' = x.
JJx
K dlvf
+
J
2x
w, 2
= O.
( 1)
i\plic¡ut>rnos a continuación el lema 3.2 para
cvalu~1r
p
Jcx ro12 = J" ron + JfJ ú>12- JY W12- J
Figura 7.39
6
w12.
(2)
Tenemos en o~ que a' = x, = y E E 1 , de manera que el ángulo <p desde
E 1 hasta a' es idénticamente Cf'ro. Por tanto, según lo que afirma el
lema 8.2,
L L
w12
=
Kg
( 3)
ds.
A continuación, estudiaremos un caso más difícil, concretamente
Aquí, el ángulo 'P desde
fll"'lz·
es precisamente el ángulo de coordenadas {} desde Xu hasta Xv (véase la
figura 7.39). En consecuencia, el lema 8.2 se aplica para obtener
Jo
K0
ds =D.-{},+
J
0
w1z
donde, como teníamos antes, O < D; < " es el ángulo de coordenadas en
el vértice Pi de x ( 1 < j :S 4). Pero corno
y
esto se vuelve
J
6
W¡z
=
T. -
Et -
L1
+
J
6
Kg
ds.
(4)
431
EL TEOREMA DE GAUSS-BONNET
De manera por completo semejante, encontramos que
i
Jjl
y que
"-'12 =
rr
-
I
Y
+
w1z
Cz
=
+
I
Y
+ i
l's
Kg
J/]
Kg
ds
(5)
(6)
ds.
De manera que ( 2) se convierte en
Ix
w12
=
=
I,
K9 ds
Lx
+ IJlK 9 ds- IYK 9 ds-
I~
K9 ds- 2"
+
(e 1
+
Cz
Kgds-
2rr
+
(e 1
+
e2
+
c3
+
~:.1 ).
+
Ee
+
~'4)
1
Y al substituir en ( 1) obtenemos la fórmula que buscábamos.
La fórmula de Gauss-Bonr:ct clepemlt>, en realidad, no del mapeo
particular x: R -7ld, sino solamente de su imagen ~R = x(R). de manera más explícita, si x es otro 2-segmento regular y uno a uno con la
misma imagen !]{, entonces cada uno de los seis términos de la fórmula
de Gauss-Bonnet de x tendrá exrrctamente el mismo valor numérico que el
término correspondiente en la de x. Esto no nos debe sorprender si x y :X
tienen la misma orientación, es decir, si determinan la misma forma de
área en !R. Pero vamos a suponer que son de orientaciones opuestas (como
se ve en la figura 7.40'1, de manera que dl'vfx = -dMx. Tomaremos el
caso más engañoso y, para ello, consideremos curvas de arista corno son
a y
f3
f3
en la figura 7 .4·0. Ahora bien, a y (3 van en direcciones opuestas:
es una reparametrización de
f3
que invierte la orientación. Pero las
curvaturas geodésicas de a y f3 se calculan en términos de las formas
de úrea opuPstas dM x y dlv1" Por tanto, hay dos cambios de signo, ele
manera que
I,
Kg
ds =
f
Kg
13
ds.
Declic;-¡remos lo que queda de esta sección a estudiar aplicaciones ele
la fórmula ele Gauss-Bonnet. La idea funcbmental es extenderla a regio-
Figura 7.40
m
I'UIJLIOTECA
¡¡¡:;;;
432
LA GEOMETRÍA
DE
RIEMANN
nes más generales; en particular, a superficies geométricas enteras. Para
ello, conviene que veamos algunas propiedades básicas de las superficies
en las que no interviene la geometría.
Una descomposición rectangular 9) de una superficie lvl es una colección finita de 2-segmentos regulares y uno a uno x 1 , • • ·, xi cuyas imágenes
cubren a M de manera tal que si dos de ellos se traslapan, lo hacen en, o
bien un solo vértice común, o bien una sola arista común.
Es evidente que una descomposición rectangular es una especie de
enlosado (definición 7.3 del capítulo VI), pero las regiones x;(R;) son
aquí realmente "rectangulares" (puesto que X; es uno a uno y regular en
la totalidad de R;), y se les pide que se ajusten entre sí muy pulcrarnente,
como se ve en la figura 7.41 (compárese con el enlosado de la figura 6.17).
8.5 TEOREMA. Toda superficie compacta M tiene descomposición rectangular.
(En consecuencia, en particular, 111 tiene un enlosado.) Este resultado
es, desde luego, plausible, pues si 1\1 estuviera hecha ele papel, podríamos
tornar sencillamente unas tijeras y recortar en ella trozos rectangulares
hasta que no nos quedara nada de i\1. Se da una demostración general
de esto en Lcfschetz [8] (se aplica el ejercicio 10).
Entenderemos que una descomposición rectangular Dl lleva COJ!Slgo
no solamente sus regiones rectangulares X¡ ( R;) -e¡ u e se llaman carassino también los vértices y las orillas (aristas) de estas regiones.
Figura 7.41
8.6 TEOREMA. Si fD es descomposición rectangular de una superficie
compacta M, sean e', a y e los números respectivos de vértices, aristas y
caras en 9). Entonces, el entero v - a + e es igual en todas las descomposiciones rectangulares de M. Este entero x(.M) se llama característica de
Euler-Poincaré de M.
433
EL TEOREMA DE GAUSS-BONNET
La demostración natural de este famoso teorema es puramente topológica; sin embargo, es consecuencia fácil del teorema 8.8.
Es fácil generalizar estos resultados. En primer lugar, podríamos substituir la superficie entera por una región poligonal, que pueda descomponerse en regiones rectangulares X¡ (R¡) pulcramente ajustadas entre sí
(como se veía antes) . En segundo lugar, podríamos reemplazar en todas
partes los rectángulos R por polígonos. (Un polígono Pes la rcgion acotada
de E 2 encerrada dentro de una curva poligonal simple, sin excluir a la
misma curva.) La combinación de las dos generalizaciones nos liC'\"a al
concepto de descomposición jJoligonal iD de una n'gión (poligonal) ~R
en AL La característica de Euler-Poincaré x U!{) de De sigue siendo independiente de la elección ele descomposición poligonal.
8.7 EJFC'.1PLO. La característica de Euler J'oincaré.
1) Lna esfera ::S tiene X (::S) = 2. Cuando "inflamos" un cubo, como
se ve en la figura 7.42, obtenemos una descomposición rectangular {j),
de ::S. Dl1 tiene v = 8, a= 12, e= 6: por tanto, X= 2. Si lo que inflamos
es un prisma, tenemos la descomposición poligonal {[Jz, con V = 6, a = 9,
f = 5; ele nuevo, aquí X = 2 (figura 7 .421.
Figura 7.42
2) Ln toro T tiene x(T) =O. Concibamos a 7' como toro ele revolución, y hag:nnos cortes a lo largo ele tres meridianos y tres paralelos. Esto
nos deja con una descomposición rectangular DI en la que v = 9, a = 18,
e = 9; en consecuencia, X = O.
3) Al agregar un asa a una superficie compacta. se reduce en 2 su
caractcríctica de Euler-Poincaré.
Sin mucha precisión, decimos que un ··asa"' es un toro al que k falta
el interior de una cara. (Suponemos que Jf y el toro se clan en descomposición rectangular.) Para agregar a 1\1 un asa, se quita el interior ele una
cara ele 1\1, y, al borde que queda, se le ajusta con suaYidad el borde del
asa, de manera que coincidan los vértices y las aristas de los dos bordes
(figura 7.43).
434
LA GEOMETRÍA DE RIEMANN
.
t9
-~
..
.
'o
"
M+ H =M'
Figura 7.43
Esta operación nos produce una superficie nuc\·a Ji', que ya nene
provista de su descomposición rectangubr. La característica ele EulerPoincaré de ,H' es
x(M)- 2,
puesto que su descomposición tiene exactamente dos caras menos que ,\1
en combinación con el toro. (La unión de los dos bordes elimina cuatro
vértices y cuatro aristas también, pero esto no tiene efecto alguno en x-)
Se ve con facilidad que las superficies difeomórficas tienen la nwma
característica de Euler-Poincaré, pues si x 1 • • · , x 1 es descomposición de
Al y F: Jf ---'?i\1 es difcomorfismo, entonces F(x 1 ) , · • ·,F(xr) será descomposición de Af con exactamente los mismos valores ele v, a y c.
Por ejemplo, no importa cuán exageradamente distorsionemos la esfera
S:
x~
+ y + z~
2
=
1,
la superficie que resulta 1\1 mantendrá su misma característica de EulerPoincaré, a saber, 2. ~Iientras no inten·engzm estructuras geométricas, la
palabra "esfera" podría significar "superficie difeomórfica a :S". Con el fin
de evitar cualquier confusión posible, consen·aremos la terminología más
larga.
Supongamos que, a partir ele la esfera ::::;, añadimos sucesivamente h
asas ( h = O, 1, 2, · · · ) para obtener una nueva superficie ¡ ( h) . Lo que
resulta notable en la operación de añadir asas es que toda suj!erficie
comjJacta orientablc Af es difeomórfica a algunas de las S ( h). En este
caso, diremos que la misma A1 tiene h asas. Por (3) del ejemplo 8.7, tenemos que
x(M) = x(2:(h)) = x(S) - 2h = 2- 2/z.
En la figura 7.44, por ejemplo, las cuatro superficies tienen una sola asa
= O.
Aunque en esta breve explicación ele la característica de Euler-Poincaré
hemos utilizado conceptos de cálculo, nuestros comentarios conservan su
validez si, en lugar ele eliferenciabilidad, pedimos en todas partes conti-
y, por tanto, en todas se tiene que X
435
EL TEOREMA DF GAt;SS-BONNET
®
'
Figuro 7.44
nuiclacl. La característica ele Euler-PoinGm-; es, en realidad, una invariante
to jJológica. t
Volveremos aquí al tema ele las superficies geométricas para demostrar
una consecuencia t>spect;tcular del teorema 8.4.
8.8 TEORL:VIA. (Gauss-Bonnet). Si Af es una superficie geométrica
compacta y orientable, entonces la curvatura gaussiana total de Af es
2"x(M), donde x(M) es la característica de Euler-Poincaré de M.
Demostración. Fijemos una orit>ntación de A1 con forma de área dM,
y sea !JJ una descomposición rectangular de 111 cuyos 2-segmentos x 1 , • • · , Xf
están todos positivamente orientados. Por tanto, {]) es, en particular, un
enlosado orientado de Af, según lo definimos en el capítulo VI, sección 7.
Por definición, la curvatura total de .M es
JL
!{ rfj[
-~ JL,
J(
( 1)
dM
;\plicaremos a cada sumando la fórmula de Gauss-Bonnet. (Esto es
válido, pues en cada región X¡ (Ri) la forma de área rLH es la que X¡
determina.) En términos de ángulos interiores, esta fórmula dice
JL,K
dM
=-
izx,Kgds- 271'
+
(t1
+
t2
+
t3
+
t4)
(2)
Consideremos a continuación lo que pasa cuando tomamos en cuenta (2)
para substituirlo en ( 1!.
t Una invariante topológica es una propiedad que todo homeomorfismo (es
decir, toda función continua con inversa continua) conscn·a. Un difeomorfismo
es un homeomorfismo, pero lo recíproco no es cierto. Sin embargo, una peculiaridad
de las d;mcnsioncs bajas E'S qup dos superficies son difeomórficas si (y sólo si) son
tamhi(n homcomórficas.
436
LA GEOMETRÍA DE RIEMANN
Figura 7.45
Puesto que JI es supé'rficie --localmente parecida a E"-- cada arista
ele la descomposición !]) ocurrirá exactamente en dos caras; señalemos para
dlo a xi (Ri) y X¡ (R¡). Sean ai y ai parametrizaciones de esta arista que
ocurren respectivamente en oxi y oxi.
Puesto que estas regiones tienen la misma orientación que Jf, ai y a¡
son reparametrizacioné's la una ele la otra, tales que im'icrten la orientación,
como se ve en la figura 7.45. Por tanto,
J
a.i Kg
ds
+
f
etj
Kg
ds
=
O.
De esto se desprende que
pues acabamos ele ver que las integrales sohrC' las curvas ele arista se
cancelan por pares. (Como es habitual, escribiremos v, a y e como los
números de vértices, ele aristas y ele caras de la descomposición.)
Por consiguiente, la substitución de (2) en ( 1) produce
¡·¡
JJ
K dM
=
-2"/
+ /J
(4)
JI
donde /j es b suma de todos los ángulos interiores de todas las caras de la
descomposición. Pero la suma dé' los ángulos interiores en cada vértice
es precisamente 2" (figura 7.46), de manera que /} = 2-;cc'. Por tanto,
(5)
J';:¡ra completar ];:¡ demostración, harc·mos urw sencilla obscn·acióll combinatoria. Las caras de la descomposición {;l son rectangulares: cada cara
tiene cuatro aristas. Pero cada arista perte1wce a exactamente dos caras.
Por tanto, 4c cuenta dos veces las a: es decir, 4c = 2a. De manera equivalente, -e = e - a, de mané'ra que ( 5) se conYierte en
437
EL TEOREMA DE GAUSS-BONNET
Figura 7.46
fl
jj
1
KdJf=2-;;-(u-e+f) =2-;;-x_(Af).
,1(
Puesto que: la característica de Eukr- Poincaré es invariante topológica,
rstc teorema nos cnseíia de la curvatura total es in uariante topológica.
De manera más explícita, sean Af y 1H superficies geom{tricas que
son meramente difeomórfiras.t Entonces, las curvaturas gaussi:mas K y
k ele "U y X1 pueden ser muy diferentes, pero sus curvaturas totales son
id /nticrzs, pnes ( ;1l srr clifcomórficas) )\[ y "U tirncn b mism:c característic:l ele Euler-Poincm{: en consrcurnria.
¡¡-
j{
t,
dif.
~ Jf
Ya nos hemos encontrado con algunos rasos ck este teorema. Por
¡•jemplo, el toro del ejemplo 2.'i tenía K = O. v, en consecuencia, cun·at11ra
total de cero. Por otra lJarte, esta rni,-ma 'uncrficic adquiere ele E: su
estructura geométrica habitual corno toro ele renllución, para el cuzd la
cmTatura es vari:1blc: de cualquirr modo, dcscubrimo, en el GlpÍtulo YL
sección 7, que su cmTatura total es tarnbit'·n cero. (E1 difeomorfislllo es, en
este: caso. nada más el mapeo identidad.'!
En general. es suficiente contar las asas para determinar la cuf':atura
total.
8.9 C01wr .wro. Si j f es supcrficic cm~1pacta y oricntabk con /1 a;;as
( h = n, 1. 2, ... ) ' entonces en cualquirr r·structur;J gcométric:l. ·en Jf, la
cun·atura total es ele 4" ( 1 - lz 1.
Demostración. Ya llf'mos Yisto que Jf tiene como c;¡r;¡ctrr!stic.! ele
Eukr--Pninc¡ré 2 - ~!h.
1
El teorema ele C.auss-Bonnct (teorema 8.3 u 8.<1) constituyn un ca mm o
para cnfrcnt:1r a1gun('S problcm:1s ck apancncJa forrnicbblr. Por ejemplo,
T
Y<'ao<' h
not~
:tl pw de la
págin~
·135.
438
LA GECJ:\IETRÍA DE R!El\IANN
el ca'io ( l) cid ejcr;1plo 2.3 nos enseña que si eliminamos un solo punto de
una esfera ::S, existe una estructura geométrica en la esfera agujer,1da para
la e ua! !{ = O. Pero no j;ucdc haber estructura geométrica en una csfc·w
(·111/.j;!l'la ::::: para la rual !{<O, pursto c¡uc, entonces.
JL ]{
d:::: :=; O,
!o que contradice el hecho de c¡ue 2,.x (:$) = 4;;-. Si in\'l'rtiwos es la argumentación, encontramos que una sujJcl ficie geomi;Lrica co111 pacta )' orientablc en !a que K > O ha de ser difeonu!rfica a una esfera. Su curvatura
total es positi\·a; pero, en el corolario 13.(), h es un entero no negati\·o, de
manera que tiene que ser cero. Por tanto, la superficie carece de asas;
es difeomórfica a la psfer:l ::S =::S (O). En los ejncicios \'Cremos mús resultados ele esta clac e.
El tcorc·ma ele Gauss-Bcmnet se dcil!uestra al partir JI en regiones
rect:mgubrcs y aplic;¡r a cada una de ellas la fórmub de Gauss-Bonnet.
Este procedimiento funciona grZ~cias a que todas estas regiones están
orientacbs cohercntenwntr mecliZ~nte una orientación ele la misma J[, ele
1nancra que las integrales /K 9ds en las fronlcr~¡s ck estas rcgiont:s se canceLln por pares. TcJ¡cmos aquí la escnci:1 ele la idea fundamental de la
1o j}()logía algeb 1aica; en efecto, fueron consideraciones de esta clase las
e¡ u e lle\·aron a Poincaré a inventarla ( \ éa:;~: Ldschetz [8]). l\fecliante
b ;¡p]icación de este procedimiento a regiones adecuadas ele 1\1 podemos
llegar ;¡ enunciar una forma más general del teorema de Gauss-Bonnct
( cjt'lTic:io 8) . Un corolario (ejercicio 11) nos enseña la manera ele extender
el tcort:ma 8.4 de los rectángulos a polígonos arbitrarios. Para \ er la nnnna en que la idea de frontera se generaliza en situaciones así, daremos
una dcnwstr:lción directa (aunque innecesaria, desde el punto ele vista
l(Jgico) del ejercicio 11 en el caso especial ele un triángulo, es decir, la
imar;cn .él uno a uno y regular ele un triángulo ordinario T t:n E" ( figura 7.471.
Figura 7.4l'
439
EL TEOREMA DE GAUSS-TIOI'\NET
y
---------...
¿
Pa
p¡
T
L\
P2
Figura 7.48
8.1 O CoROLARIO. Si .::, es un triángulo en una superficie gcométrica
1H, entonces
(En el transcurso de la demostración 1remos explicando esta notaci{m.)
Demostración. Sea dA! una forma de área arbitraria en la rcgwn .6-.
Obtenemos una descomposición rectangular ele D. = y ( T) de la m;mcra
siguiente. Pártase T en tres cuadriláteros, como lo indic<:t la figura 7.48;
a continuación, los cambios de variables en y exhibirán las imágenes como
las regiones rcctangularcs Xt (Rt), xARc), x~ (R 3 ) que constituyen una
descomposición rectangular de D.. Como es habitual, disponemos bs cosas
de manera que cada X¡ esté positivamente orientada. Por tanto, la fórmula de Gauss-Donnet se aplica aquí a los ángulos interiores para ver que la
curvatura total de D. es
ff
JJ-1
K rL\1
=
±jJx¡
ff K r!M
1
=
1
donde c0' cs la suma de todos los ángulos interiores.
De las doce aristas en 2'Xt, oxe, oX::, las seis que son interiores se cancelan por pares (por lo menos, JKg ds lo hace, en ellas) . Las otras seis se
rombinan por pares para darnos las curvas a 1 , a~, a.1 (figura 7.47) que
constituyen la frontera 2D. del triángulo orientado D.. En consecuencia,
±jr~
1 =1
x¡
Kg
ds
=
r
J
Qtl
Kg
ds =
r
J
rt1
Kg
ds
+
r
Jrt~
Kg
ds
+
r
J
Kg
ds
rt3
En la suma !1, los úngulos interiores t1, te, t 3 en p1, p 2 , p:3 son los
del mismo triángulo .6-. Los demás, que ocurren en los \·értices que introdujimos ele manera artificial, suman, eYidentcmente, Sr.; por tanto, encontramos que
440
LA GEOMETRÍA DE RIEMANN
Lo que hacernos PS adaptar al triángulo las definiciones de 8.3; por
tanto, [j + <j = -;;- nos da la fórmula de ángulos exteriores.
1
Si las
puesto, el
triángulo
resultado
curvas de arista del triángulo son geodésicas, entonces, por sutérmino de curvatura geodésica se anula. En particular, en un
de geodésicas en una superficie de curvatura [{ constante, el
se reduce a
donde A es el área del triángulo. Por tzmto, el conocido teorema de la
geometría plana acerca de que la suma de los ángulos intpriorcs de un trián-
Figura 7.49
gulo es " depende del hecho de que E" es llano. Hay ejemplos en los que
se ve fácilmt:'ntc la manera en que un triángulo de geodésicas se bs puede
arreglar para tener ¿, + [e + t:¡ mayor que " en una esfera (K> O) (figura 7.49).
EJERCICIOS
1. Encuéntrese la curvatura gaus:>wna total de:
a) Cn elipsoide.
b) La supcrricie ele la figura 4.10.
e) JIJ: x" + y' + zG = l.
2.
Demuéstrese c¡m-, en un:1 superficie geométrica ;\/ compacta y onentablc:
K
> O=) 1\f
K=O
es difcomórfica a una esfera
1\1 es difcomórfica a un toro
[{ < O=) ,\1
es una esfera con 1z 2':,2 asas
(véase el tf'xto)
441
EL TEOREMA DE GAUSS-BONNET
.-
:.. ...:.
~-::~,
3. a) Sea M una superficie geométrica. compacta y oricnt~híe/ O:~"ii0 ftt'-.
asas. Demuéstrese que existe un punto p ele Al en d cual
' • - . '"-t; q~
..
~ :;
K(p) >O Sl h = o,
K(p) =O
;;¡
h
K(p) <O
Sl
h >2.
=
1,
b) Si Af es superficie compacta y oriPntable en E' que no es di feomódica a una esfera, hágase ver que hay un punto p de JI en el
cu:~l J{(p) <O (compárese con el teorema 3.:) del capítulo VI).
4. a) En un segmento de curva regular a: [a, b] --é> A1, hágase ver quP
la curvatura geodésica total fa Kg ds es
J
a
a"•](a
1
a •a
1
1
)
d
t.
(Indicación: Ejercicio 9 de la sección 4.)
b) Sea x una carta ortogonal (positivamente orientada) en Al. Dedúzcanse las fórmulas siguientes de las curvaturas geodésicas totales de las curvas paramétricas:
_ JVz
,.,
(Observemos que ·JEv = - Xuu'X,., y que 1e,. = - Xvv'Xu, y, si A1 está
en E", tanto las clerivad:~s intrínsecas como las euclidianas clan el
mismo resultado.)
5. Sea x: R --é> :S la carta geográfica (ejemplo 2.2 del capítulo IV),
restringida al rectángulo R: O < u, u < "/ 4. Calcúlese por scp;uado
cada uno dP los términos de la fórmula ele Gauss-Bonnet de x.
6. Si F: A1 ~N es mapeo de superficies compactas y orientadas, el
grado grr ele F es el área algebraica de F(M) dividida entre el área
ele N. Por t:tnto, gr 1 • representa el número algebraico total de veces
cr.1e F enrolla a JI;! sobre l\'. Si Al es superficie compacta y. orientada
en E", dcmuéstrC'se el teorema de IIojJf: el grado gra del mapeo de
Gauss es el entero x(¡\J) /2. (Se puede demostrar que el grado es
siempre un númpro entero.)
Una regiún poligonal orientada !:Y en una superficie ]¡[ es una región
orientada que tiene una descomposic·ión rectangular x 1, • • ·, x 1,, en la que
siempre disponemos las cos:~s ele manera que esté po;,iti\·amcnte orientada.
Entonces, la frontera 2~I' de 9:' es la suma formal de las cun·as ele arista
que aparecen ex:~ctamen\c en una de las •fronteras ux 1 , • • · , 2x~c. Excluimos
442
LA GEOMETRÍA DE RIEMA:-/N
Figura 7.50
ele esto la situación e¡ u e se ve en la figura 7 .:in, de manera que 2~;' siempre
estará compuesta de curvas simples ( qucbrC~das) y ccrrad;1s. Est;¡,; definiciones tienen la propiedad de que, si a es una ele las ;1ristas de 00), entonces
.He/) siempre apunta hacia el intrrior de la región 5_P. (Esto \·icnc a dar
rigor a la regla aproximada: ''Se lTCOITe la frontera ele rnanC'ra que b
región siempre c¡ueela a nuestra izc¡uicTela.'')
7.
a)
Si ~+, es una 1-forma en una n·gión poligonal micntada ~e, demuéstrese el teorema generalizado ele Stokc'>
( . cb¡ sicrnifica
~ • (~ d11.) ( lnr!iracic5n: El
(Si c5J' = :::,;a;, entonces ·'i'~.(j)
('J
lema del capítulo IV produce algunas cancelaciones por pares,
como sucede en la demostración del teorC'ma 8.8.)
b) ])C'dúzcase que si ·rp es cualquier 1-forma en una superficie compacta y orientada 1\1, entonces Jhr dq) = O.
e) Dos descomposiciones rectangulares (positivamente orientadas), que
sean diferentes, de la misma región [? producen fronteras de
que son diferentes desde el punto ele vista técnico; sin embargo;
ambas ocupan el mismo conjunto ele puntos. Demuéstrese que,
para CU~llquil'l' ]-forma en ~P, ~r _\P (~¡ es ié·u~d
en ambas.
'
!
'
'
r
Si :~e es una regwn
poligonal orientada en una superficie geométrica, demuéstrese que,
8. (El teorema generalizado dr Gauss-Ronnct.)
Hg,K dM + L'l"K
9
ds
+ 2:
EJ
=
2,.x(.0))
done!:: :S E i es la suma ele los ángulos exteriores ele Q', según se
definieren en h definición 8.3 en el caso especial ele una región
rectangular (figura 7.:)11.
(Indicación: Refínese la demostración del teorema 8.8: clasifíquensc las aristas y los vértices con los ele c~P y los del intFrior de
D'. Observemos que, en cada curva cerrada y simple de frontera,
el número ele aristas es igual al número ele vértices.)
EL TEOREMA DE GAUSS-BONNET
443
Figura 7.51
9. Demuéstrese que las propiedades siguientes de una superficie com-
pacta y orientable JJ son equivalentes entre sí:
a) Existe un campo vectorial tangente en Af c¡uc no se anula.
b) x(Af) =O.
e) ¡\1 es difcomórfica a un toro.
(Indicación: Para (a) =) ( b), 1xm·éase a Af de Pstructura geométrica y aplíquese el ejercicio 7.) Las propiedades (a) y ( b) resultan
ser, en realidad, equivalentes en cualquier \·ariedad compacta.
1O. a) Si una región .Cfc tiene desc:m 11posición rectangular, derívese de
ella una cle;,composición triangubr y verifíque'ie que v - a + e
vale lo mismo en ambas.
b) Hágase lo n:nsmo, con papeles invertidos de "triangular" y " rectangular''.
La idea de región simple (ejercicio 12 de VI. 7) se puede extender si
se define el mapco F: D--o> 1\f como no cliferem:iablc (pero aún continuo)
en n puntos de la circunferencia u" + v 2 = l. Con esto, aparecen n puntas
agudas en la fron\na c5i ele !_¡) = F(D). Decimos, en este caso, que es un
n-polígono ( n >O). La característica ele Euler-Poincaré de un n-polígono
es + 1, puesto que, en una descomposición triangular, tenemos. (como se
n~ en la figura 7.52) v - 1 ~~ f = ej2.
oo--F
D
Figura 7.52
444
LA GEOMETRÍA DE RIEMANN
11. Si 51) es un n-polígono orientado de geodésicas (es decir, las aristas
son geodésicas) en una superficie geométrica, demuéstrese que
JI
11
., 51'
donde
Ej
y
tj
KdM =
2~-
L:EJ; = (2j =1
11
n),.
+ L:tj
j
1
son los ángulos exteriores e interiores de 0'.
12. (Continuación). a) Si !} es n-polígono ele geodésicas en el plano,
demuéstrese que rz > 3 y que la suma de los [mgulos exteriores de
~p es 2~.
b) Si A1 es superficie con curvatura gaussiana ]{*O constante
hágase wr que el área de un polígono de geodésicas queda determinada por sus úngulos, exteriores o interiores.
e'¡ En la esfera ::S de radio r, encuéntrese un 3-polígono de geodésicas
0_) cuyos ángulos interiores sean, cada uno, de 3~ /2. ¿Cuál es el
área de 51)?
13. a) En una superficie Al en que K < O. dt>muéstrcse que no existen
n-polígonos ele geodésicas con n <::: 2. Por tanto, en particular,
dos geodésicas de Al no se pueden encontrar para f armar la frontera de una región poligonal simple.
b) En una esfera ::S, en la que hay valores de n > O, ¿existen
n-polígonos de geodésicas? (1'\o se cuentan los "vértices removlbks", que son los de ángulo exterior ele ceJO.)
14. En el plano hiperbólico, sea 5.E'n (n ? 3) un "n-polígono de geodésicas'' cuyos vértices estén en el borde u" + v 2 = 4 de H, ele manera
que, en realidad, no pertent>ct>n a H (figura 7.53). Encuéntrese el
área de 9_\.
Figura 7.53
f3 es una curva cerrada y simple en
tonces la curvatura geodésica total de (3 es ±2~. Por tanto,
gente unitaria T ele (3 recorre una circunferencia completa al
(3. Demuéstrese la validez ele este res\;ltado si se supone que
15. (Hopf Umlaufsatz). Si
E", enla tanrecorrer
(3 es la
RESUMEN
445
curva de frontera de una región simple d. (Indicación: d es un
O-polígono, de acuerdo con la definición que se hizo un poco antes
del ejercicio 11.)
La supos1c10n anterior siempre se cumple, pero su demostración reqmere de métodos topológicos bastante profundos.
9
Resumen
Una superficie geométrica -es decir, una variedad bidimensional de
Riemann- generaliza el plano euclidiano al reemplazar E" por una superficie cualquiera y substituir el producto escalar de vectores tangentes
por productos interiores arbitrarios. En la geometría de Rirmann que resulta, se define la longitud ele una curva como se hacía antes, y se da la
idea ele distancia intrínseca mediante la generalización de la distancia
euclidiana con que estamos familiarizados en el plano. La aceleración
de una curva también es una idea geométrica, pero no resulta igualmente
evidente la manera en que el producto interior ele vectores tangentes puede
llevar a la medida de la flexión de una cun:a. Después de Ricmann,
pasaron 70 u 30 años durante los cuales se llevaba a cabo dicha medición
por medio ele fórmulas bastante complicadas, en términos ele cartas ele
coordenadas ( 4.2 es muestra ele ello). Con la actitud de Cartan, el producto interior sirve para definir el concepLo de campo de sistemas de
referencia, y su forma de conexión expresa la rapidez de rotación ele un
campo de sistemas de referencia. La ecuación de conexión V' l E 1 = w1e (V) E e
define, a continuación la derivada cm·ariantl', ele la cual es caso especial
la acekración.
Tanto en la geometría ele Riernann como en la euclidiana, las geodésicas son las curvas con aceleración cero. Las geodésicas no son solamente las
curvas más rectas, sin embargo; también son las más cortas, en el sentido
que se explica en las secciones 5 y 6. La sencilla regla euclidiana de que
"la recta es la distancia más corta entre dos puntos", no nos preparzt para
entender el comportamiento nuevo y sutil de las geodésicas en una superficie geométrica arbitraria, y ni siquiera en una superficie -tan sencilla
como son la esfera o el cilindro. La obra de ~filnor [7] da una idea de
cuán lejos puede llevar al estudiante el análisis de las geodésicas.
,\ estas zdturas, es apenas necesario señalar que la curvatura gaussiana
]{ ele una superficie geométrica JI f'S la propiedad geométrica más importante que tiene, pues hemos visto que, tarde o temprano, la curvatura interviene en casi cualquier investigación geométrica. En efecto, podemos
definir K, por ejemplo, en términos de campos vectoriales paralelos (holonomía), ele geodésicas radiales (la f'Cuación de Jacobi) o de circunferencias
446
LA Gf.Ol\IETRÍA DE RIEl\IANN
pobres. (En un:1 superficie en E-1 • nos serYimos del operador de forma, y
nos podría haber v;llido para lo mismo el m apeo de Gauss.) En el punto
de vista de C;utan, sin embargo, se define b cmTatura por medio ck b
ecuación ch, 12 = - J{ 0 1 A g"' que nos nJuc,tra a K (en el sentido explicado anteriormente) como la "segunda derivach" com{l'J de iodos ]o,
campo:; de sistemils ele referencia en JI. Y es por esta ddir~ci(m que
hemos llegado más directamente al resc11iac1o central ele la gcnnwtrb biclimensionill de Riemann: el teorema de Gauss-Bonnct. Si hacemos a un
lado consecuencias trigonométricas como las del corolario 8.1 O el contenido del teorema es que la curvatura determina h topología, por lo r:wnos
en el caso compilcto y orient:tblc.
En general, los resultados de este capítulo son \·{tliclos en varic·cL<cks ele
Riemann de dimensión arbitraria, n, y, en la milYOl' parte de los c;¡sos, las
definiciones y demostraciones apenas neccsit<m algunos cambios. La dimensión 2 viene a simplificar ;¡]gunas demostraciones ele consistencia, como
las ele los teoremas 2.1 y 3.2, pero se pueden evit:1r completamrntc con ei
uso de métodos más :1vanzaclos. Como es ele esperarse, el teorema de
Gauss-Bonnet es el ele generalización más difícil (\·~;¡se I-Ticks [:!]), y en
dimensiones (pares) más altas, la curva tu m de i'.f influyr. sin controhrla.
en la configuración topológic:1 de 111.
f
Bibliografía
l. H. Flandcrs, Differential Forms: With App/icatimz¡ to thc l'hysical Sciences.
Acadcmic Press. ~ucva York, 1963.
G. Birkhoff y S. 1\IacLane, A Survey of M odern A lgebra. Macmillan. Nueva
York. 195:3.
l. T. J. Willmore, An Introduction to Differential Geometr)'. Oxford Univcrsity
Prcss, Londres y Kucva York, 1959.
4. R. Courant y H. Robbins, TVhat is Mathematics? Oxford L'niversity Press,
Londres y I\ueva York, 1941. (Hay traducción al español: c'Q.ué es la matemática?, publicada por la casa editora AguiJar.)
5. N. J. Hicks, Notes on Differential Geometr)'. Van Nostrand, Princeton, Nueva
Jersey, 1965.
6. D. J. Struik, Lectures on Classical Differential Geometry. Aclclison-Wesley.
Reacling, Massachusctts, 1961.
7. J. W. Milnor, Morse Theory. Princeton University Press, Princeton, Nueva
Jersey.
8. S. Lcfschetz, Introduction to Topology. Princcton University Press, Princeton,
Nueva Jersey, 1949.
Los libros ele Willmore y Struik están mas o menos en el m1smo nivel ele dificultad que éste. El libro ele Hicks empieza en un nivel que se puede comparar con
nuestro capítulo VII y hace una exposición muy concisa de la geometría multiclimensional ele Riemann; en su bibliografía se enumeran varios trabajos más detallados acerca de este t~ma.
447
Respuestas a los ejercicios impares
Estas respuestas no vienen completas; en algunos casos, cuando
se pide una demostración, damos sólo una indicación.
Capítulo 1
Sección 1
1. a) x"y 3 sen 2 z, e) 2x 2 ycosz
3. b) 2xehcos (eh), h = x 2 +y2
+ z2
Sección 2
1. a) -6U 1 (p) + U 2 (p) - 9rf:Jp)
3. a) V= (2z 2 /7)U 1 - (.ty/7)U"
e) V= xU1 + 2yU2 +,\fU,
5. b) Aplíquese la regla de Cr::uncr.
Sección 3
1. a) O, b) 7 • 27 , e) 2e 2
3. a) y 3 , e) yz 2 (y 2 z- 3x 2 ) , e) 2x(y 1
5. Aplíquese el ejercicio 4.
-
3z 0 )
Sección 4
l. a'(r./4) = ( -2,0, \(2)v, donde jJ = (1,1, -{2)
3. (3(s) = (2(1- s2 ), 2s yl-..::_-~ 2 , 2s)
5. Las rectas se cortan en ( 11, 7, 3).
7. Yp = (l,O,l)p
9. En a(O): t--7 (2,2t,t)
Sección 5
1. a) 4, b) -+, e) -2
5. b'
dy- ydx)j
+ yz)
450
RESPUESTAS A EJERCICIOS IMPARES
7. a) dx- dz, b) no es 1-forma, e) zdx + xdy, d) 2(xdx +ydy),
e) O, (f) no es 1-fonna.
9. -+- (0, 1 ~)
11. a) Empléese la aproximación ele Taylor de la función t--¿ f (p + tv)
b) Exacto: - 0.420, aproximado: -}
Sección 6
1. a) cp 1\ >f; = yz cos .z dx dy - sen z dx dz - cos z dy dz
b) rlcp= -zdxdy-ydxdz. Nótese que d(dz) =d(1•dz) =0,
por 1.6.3.
7. Aplíquese esta definición a la fórmula que está después de I.6.3.
9. Si se supone la validez ele la fórmula, póngase f = y, g = .1:.
Sección 7
1. a) (0,0), b) (-3,1), (3,-1), e) (0,0), (1,0)
5. a) (2,0,3) en (0,0,0), b) (2,2,3) en (0,2,-;;-)
7. GF = (gi(fJ,fc), gc(/dc))
11. a) F- 1 = (v,ue-"), b) F- 1 = (u 1'',u + u 1 i'·\. e) F 1 = ((9 -u2v) /2, 5 - u - v). F es difromorfismo ~obmente m (a\ y en (e),
puesto c¡ur, en ( b), F- 1 no es difercnciablc (cuando u = O).
Capítulo 11
Sección
1. a)
-4, b) (6,-2,2), e) (1,2,-1)/v6, (-1,0.3)/-v'Tü, d) 2vTI,
e) -2/ {13
5. Si v X w =O, entonces u • v X w =O para todo u; aplíquese el ejercicio 4.
7. Vz = v - (v•u)u
Sección 2
3. (3(s) = (\(i-+~"/2,s/v:!.senh 1 (s/v2))
5. Si se bas:1
en ti ( i = l. 2), entonces s,, es más o menos la longitud
de arco de a desde t 1 iusta tz.
9. b) La condición es, desde luego, necc.,aria: p:ua ,·crificar que es :>uficientc, muC·strrsc que una reparanwtriz:1ción de rapidez unitaria ele a
tiene aceleración cero.
11. b) L(a)
r/¡
¿ ja
a'•udt
=
r¡,
2: Ja
do:¡
r1
d~ 11; t =
(ci- p) •u
d(
=
p,q
)
451
RESPUESTAS A EJERCICIOS IMPARES
Sección 3
l. K = l,T = O,B = (-%,0, -%),centro (0,1,0), radio l.
7. a) 1 = 11 a(h)' 11 = 11 a'(h)h' 11 = 1 h' 1, en consecuencia, h =+l.
b) Sea E= +1, entonces a= a(h) implica T = tt'(h) h' = ET(h);
en consecuencia, í<N = K ( h) N ( h), y así sucesivamente.
9. La proyección ortogonal en el plano N 0 B 0 (el jJlano normaL de f3 en
{3(0)) es S---'?K 0 (s"/2)N 0 + KuTo(s"/6)B 0 (cúspide en s = 0).
11. B = B implica que T.\' = -:r:V, en consecuencia, o bien ( 1) r = T y
N=N,obien (2) -:r= -TyN= -.V.
Sección 4
1. Sea f = f + 2; entonces K = T - 2/f; B = (t",-2t,2) //
3. a) N(O) = (0,-1,0), T(O) = J{
9. a){}= "/4.u = (1,0,1)/Y2;y(t) = (t- (t"j6),t 2 , -t
15. e) La cvoluta es también una cicloide.
17. a'(t) = (f(t) sen t, f(t) cos t, f(t)g(t))
+
(t1 /6))
Sección 5
1. a) 2U 1 (p) - Uc(p), b) UI(p)
5. a) 8U 1 (p) - 4(Uc) (p)
+
2 U"(p)
+
4 U,,(p)
Sección 6
1. Hágase Yer que V•W =O, y aplíquese II.l.8.
3. Por ejemplo, E 2 = -sen zU" + cos zU,, y R, = R 1 X E".
Sección 7
1. w," = O. '"13 = w" 3 = ( df) / \ 12
3. ú>te = - df, w10 = cos f df, '''"" = sen f df
5. Por el inciso (3) de U.5.4,\7 r(¿ fiE;) = ¿ qf;]E; + ¿ [i\7 rE;.
7. En un punto arbitrario p, a(t) = tp es una curva con a'= 11 p 1! F1.
Hágase ver que
11
P
11
F1[jJ]
=
1!
P
11·
Capítulo 111
Sección 1
3.
(T,) - 1 = T_ 0 , C- 1
= T o- 1 (a)C-'.
=-te,
en consccuenoa, F-1
e=
(T,,CI ' = C-'T-a
5. b) Por medio del ejercicio 3, encontramos que F- 1 (p) = ( 5 {2, -5,
4-v'2)
452
RESPUESTAS A EJERCICIOS IMPARES
Sección 3
1. Si F y G tienen partes ortogonales A y B, entonces, por III.1.2,
sgn (FG) = dct (AB) = det A · det B.
5.
es una rotación, que recorre un ángulo de "/2 alrededor del eje
determinado por a.
7. Para E 1 : F(s) =Es+ so; para E 2 : F =Te, donde e=
e
cos 1J
( sen{}
-E sen{})
E COS {}
Sección 4
1. b) Por definición, /i(s) es el punto que corresponde canónicamente a
T(s); en consecuencia, por III.2.1, C(/i) corresponde a F,.(T), la
tangente unitaria de F (/3).
5. Para un vector tangente v en p, F,.(\i',.W) = W(F(p) + tC(v) )'
(0) = \7 F*(vl W.
Sección 5
1. f3 = Tv(e(a) ), donde e(ui) = ei
3. Consecuencia de III.5.7
5. Si T no es idénticamente cero, se supone que T(O) =1= O y se examina
la demostración de 5.3.
7. Sea F =Te, donde Tes la traslación en (0,0, bs0 /c) y
cos (so/ e)
e= [ sen6s 0 /c)
-Esen (so/e)
Ecos ( s0 j e)
o
01
0
eJ
donde E= -+-1. Entonces, F(/3) = f3(Es + s 0 )
9. a(s) = (f cos r,o(s) ds, J sen r,o(s) ds), donde <p(s) =
11. Se aplica el ejercicio 9.
J K(s)
ds
Capítulo IV
Sección
1. a) El vértice, O, b) todos los puntos de la circunferencia x 2 + y 2 = 1,
e) todos los puntos clel eje de las z.
5. b) e =1= -1
9. Aplíquese el ejercicio 7.
11. q está en F(M) ,.j y sólo si F 1 (q) está en M, es decir, g(F-1 (p)) =c.
Usesc la indicación para aplicar IV..l.4.
453
RESPUESTAS A EJERCICIOS IMPARES
Sección 2
l. e) x(u, v) = (u,v,u" + v") t'S una posibilidad; una parametrización
deriYada de IV.2.5 omitirá un punto de la superficie.
5. x, X Xv = v8' X 8
7. b) Rectas (rayos) y hélices, e) M: xsen (z/b) = ycos (z/b)
9. x(u, v) = (cos u- v sen u, sen u+ v cos u,¡;)
13. a) Si g' no es nunca cero, reparametrícese la curva perfil para obtener
u~ ( u,f (u ),0), y aplíquese IV.2.5.
Sección 3
1. a) r 2 cos 2 v, b) r 2 ( 1 - cos 2 v ces u sen u)
3. a) u y v son las funciones coordenadas euclicli~mas de x- 1 y.
b) Exprésese y = x (U, ü) en términos de coordenadas euclidianas
y diferénciese.
5. a) .H está dada por g = z- f(x,y) =O, con \lg = (-/r, -fu, 1),
y ves tangente a M en psi y sólo si v•\Jg(p) =O.
7. \7 0 = (- }',- x,l) es campo vectorial normal; V es campo vectorial
tangente si y sólo si V•\7 9 =O; por ejemplo, V= (x,O,z).
9. a) Tp(.\1) consta de todos los puntos r tales que (r- p)·z =O;
en consecuencia, v 1, está en T P ( AJ) es decir, v•z = O) si y sólo si
p + v está en Tv(M).
11. a) 2,..
Sección 4
3. d(f</>) (x,, Xv)
5. Si
=
2/(x)
-
eu -
d,>(Xv)
es una curTa con la velocidad inicial v en p, entonces
rt
,[¡;(/)] = (gfa)'(O) = g'(fa) (O) (f(t)'(O) = g'(f(p) )vA!].
' 1
7. En el traslapamiento de Q.1i y Q{h df; - rlfj
9. b) du(xu) = xu[il] =
~(u(x))
('u
2u
r"u
=
=
d(fi - fi') = O.
1
.
Sección 5
1. Si x: D ~M es carta, entonces F(x): D ~N es (por 3.2) mapeo
diferenciable. En consecuencia, y- 1 Fx es diferenciable para cualquier
carta y en N.
r·--~-~·"
454
RESPUESTAS A EJERCICIOS IMPARES
3. Si :X y y son cartas en M y N, entonces y- 1 Fx = (y- 1 y) (x- 1 x) es diferenciable, por ser composición de funciones difcrcnciabks.
7. b) x'''(v) = r 3 sen 2 v cos v du dv
11. Sólo a) no es difeomorfismo. ·
13. b) F,,(ax 11 + bxv) = ayu +by, implica la linealidad.
Sección 6
7. a) 2r.m, b) 2r.n.
13. b) Hágase ver que Ja.</> = Jx d<f> para una x adecuada.
15. e) Empléese la conexión simple para demostrar la fómmla de la
indicación; véase la figura 4. 46.
Sección 7
1. a) Conexa, no compacta, e) conexa y campacta, e) conexa, no compacta.
3. Si v no se anula en N, hágase ver que F''v no se anula en ~~f.
5. a) Si Z es una normal no nula, sea ±U= +Z/ ![ Z 11. Si V es una
normal unitaria cualquiera, póngase V = ( V·U) U y <tplíqucse c:l resultado del ejercicio 4 ( b).
b) La imagen x(D) de una carta en la que D es conexa.
9. e) Empléese el ejercicio 7.
Sección 8
1. Modifíquese la demostración del caso ele la cinta de ).lcibius en IV.7.
9. (x X y)- 1 (x X y) = :X-':X) X (y-1 y), que es la función cliferenciable.
Ca.pítulo V
Sección 1
1. Empléese el método 1 del texto.
3. a) 2, e) l.
Sección 2
1. b) Si e 1,e" = (ú 1 + u2)/v2, entonces S(e1) = e1 y S(e")
-e2
Sección 3
5. b) En un lado, una elipse, y ningún punto en el otro; las dos ramas
de una hipérbola (asíntotas en las dos rectas de (a) ; dos rectas paralelas en un lado, y ningún punto er; el otro.
RESPUESTAS A EJERCICIOS IMPARES
455
ü~ es curva en 1\1 con la velocidad inicial y en p, entonces
F.,(v) = F(a)'(O) = (a+ EUa)'(O) = v- ES(v) m F(p).
7. a) Si
Sección 4
5. K = - 36r 2 / ( 1 + 9r 4 ) "; no es mínima.
7. Calcúlese la rapidez a partir ele a' = a/xu + a/xv.
13. p = x(u, v) es punto umbilical si y sólo si S(xn) = kxu y'S(xv)
kxv en (u, v) . Hágase el producto escalar con Xu y Xv.
15. a) Ninguno, puesto que K< O, b) el ongen (punto ele planicie),
e)
(O -+- ~
y-¡;?. - b 2 a"
~
2
b
)
si a
~
b
Sección 5
3. Un meridiano a descansa en un plano ortogonal a Af a lo largo de a,
en consecuencia, a" es tangente a este plano, y (con una parametrización de rapidez constante) ortogonal a a': por tanto, a" es ortogonal a Jf.
7. S ( T) = - L:'; en consecuencia, por el desarrollo ortonormal, U' =
-S ( T) •TT - S (T) •VV. Prosígase ele la misma manera que en la
demostración de las fórmulas de Frenet.
15. En el rayo que pasa por (}' (u), la fórmula ele [{ del ejercicio 14 nos
enseña que o bien K es idénticamente cero, o bien K < O tiene un
valor mínimo - 1 / p (u) e en (}' (u). y se alza simétricamt:>nte hacia el
cero cuando v--'> ± oo.
17. a) Para (u, O. 0) + v(O, 1, u): el eje de las .Y, con jJ(u) = 1 + 11 2.
b) Aplíqnt:>se Pl ejercicio 15. Para u fij<~, K = - ( 1 + u 2 +
-" tiene un mínimo cuando <' = O.
19. e) x = a + d) es no cilíndrica, y podPmos suponer que a es curva
guía (clp rapidez unitaria). Pero a'•8 X 8' =O (puesto que K= O)
y a'•8' = O ( cun·a guía) : en consecuencia, T = a' y 8 son colineales.
Sección 6
1. K = ( 1 - :r~) ( 1 + x" cxp ( - x 2 ) ) -e.
3. Aplíquense los resultados de V.2. J'\ótese c¡ne los merieli¡mos son
Sl'ccionrs norm;1lPs.
5. Jf tien(• b par:nnrtriza(iÓn x(u.:•) = (ucos:•.us('nv,f(u)).
7. C:on la p:n:1mctrización lnbituaL al argumentar como se hizo en
V.6.2 se tirnen s'olanwnte los casos extremos: rl es siempre cero, g'
no es rmnca cern. En el primer caso, 1\1 es parte de un plano (que
es caso especial ele un cono) .
9. e) Si r = f
tiene la parametrización de rapidez unitaria (g, h),
dondr h (u) =re-"'"· hág:1:;e ver que f (¡y no h!) satisface la ecuación
diferencial ele YI.6.fi.
456
RESPUESTAS A EJERCICIOS IMPARES
Ca.pítulo VI
Sección
1. a) a"= w1e(T)Ez + w,3(T)E3 ; en consecuencia, a" es normal a M
si y sólo si w 12 (T) =O.
5. Si el campo cilíndrico de sistemas de referrncia se restringe a Jf y
se invierten los índices 1 y 3, obtenemos el campo de sistemas de
referencia en (1) de VI.l.3. De acuerdo con los cálculos de II.7,
w12
=
o1 13
= O,
Sección 2
= ¡f(E1) 81 + ¡f(E2 ) B2
b) /; = h1w23 - hzw13
3. a) ¡f¡
=
-
hzB1
+
h1Bz.
Sección 3
1. Si K = H = O, entonces k 1 ke = k 1 + k 2 = O. Por consiguiente,
k1 = kz = O y S = O.
3. Supóngase que k 1 =/= k 2 y recúrrase al lema de Hilbert (3.6) para
llegar a una contradicción.
5. En el caso en que k 1 =1= k 2 , aplíquese VI.2.7 para verificar que, por
ejemplo, k1 = O. Por el ejercicio 2, las k 1 curvas principales son rectas.
Hágase ver que las k2 curvas principales son circunferencias, y que
las ( k1) rectas son paralelas en E 3 •
Sección 4
1. (d) =) (b): si u es vector tangente arbitrario en p, entonces
u = av + bw; en consecuencia,
11 F*u
W=
a"ll F*v 11"
+ 2ab F*v•F;,w + b
2
l[ F,w 11 2 =
a 2 [[v[[ 2 +2abv•w+b 2
[[w[[ 2
=
[[u[[ 2
3. Si a es un segmento de curva desde ( -1,0,0) hasta (1,0,0) de longigitud 2, entonces, de acuerdo con el ejercicio mencionado, a parametriza un segmento de recta; esto es imposible, pues a se tiene que
quedar en 1\1.
5. a) Dcfínase F(a(u) + vTa(u)) = f3(u) + uT~(u)
b) Escójase f3 en E 2 con la misma función de curvatura.
7. a) El critcrio (a) se convierte Pn F.,.(v)•F,.(w) = A- 2 (p)v•w; el cnterio (e) se convierte en F.,.(e;)•F,.(ej) = A."(p)o;;.
11. Póngase F(x(u,v)) = x(a(u), b(u)) para paramctrizacioncs adecuadas.
457
RESPUESTAS A EJERCICIOS XMPARES
13. En y, hágase ver que las condiciones E = G y F = O equivalen a
g' = cos g, que tiene la solución g (u) = 2 tan-1 ( ev) - ( :-:-/2) tal que
g(O) =O. Aplíquese el ejercicio 7.
15. F(x(u,u)) = (f(u) cosu, f(u) senu), donde x es parametrización
canónica y f(u) = exp (f~(dtfh(t)).
Sección 5
1. Si a' = E, a lo largo de a, entonces F(a') = F*(E 1 ) = E 1 a lo largo
ele F(a). Aplíquese VI.5.3.
3. K o existe isometría local de la silla de montar M ( -1 :::;; K < O)
sobre un catenoicle en el que -1 :::;; K < O, puesto que K tiene un
punto aislado y mínimo (ten O) micntr;:cs que J{ toma cada uno de
sus valores cn circunfercncias completas (Hay muchos ejemplos más
que son posibles.)
5. b) Se desprende de VJ.4.:1. puesto quc, para x 1 calculamos E, =
cosh 2 u = G,, y F 1 = O (indqJCnclicntcmtente de t).
d) Para 1\1 1 : U 1 = (s,-c,S) jC, de manera que las coordenadas
euclidianas de U 1 son independientes de t.
Sección 6
1. b) () 1 = v'l+ u 2 du,
u2) "·
3. w12 = -{}, du.
() 2 = udu. "' 12 = du/v'T-+ uZ,
K= 1/(1
+
Sección 7
3. a) A= (2"/3){(1 + c2 )'1,- 1}, b) w
5. a) Empléese una pararnetrización canónica; en ton ces, x"'" (K rli1!)
(- h" / h) (h du du) = - h" du du. Recuérdese que h' = sen 'P·
e) en la suprrficie trompeta, lím 'Pa = -1, lím 'Pb = O.
(1-...,>'l
b-HfJ
7. Aplíquese te] ejercicio 5. En los bordes ele esta:, tres superficies,
lt' = srn 'P--¿ ±l. Para K= l/c 2 (V.6.5): en el caso (2). TC =
~t-17/c. ",1=4"ac: en el caso
(31, TC~~4-;r, A=4"c.2. Para
K= -llc 2 (ejercicio 9 ele V.6):MatieneTC=2-;r(a-c)'c, Mb
tiene TC = -4-;r.
9. a) Aplíquese el ejercicio 14 de V.5.
11. Defínasex(u,u) = F((1- u) cosu, (1- u) senu),enR: O:::;; u:::;; 1,
o:::;; 11:::;; 2-;r.
13. Con la normal hacia afuera, H = - ¡;r, y h = r.
458
RESPUESTAS A EJERCICIOS IMPARES
15. Al dividir, si resulta necesario, por las longitudes de V y W, podemos
suponer que son campos vectoriales unitarios. Por tanto, V, U X V
es un campo tangente de sistemas de referencia en <X. El desarrollo
ortonormal nos enseña que SI f = ~V· V y g = W•l' X F, entonces
!" + g2 = l.
17. a) Aplíquese 11 F.v X F,.w ~~
1] ] 1 v X w 11
19. a) F transforma los enlosados positivamente orientados de '!VI a enlosados positivamente orientados ele ;11.1•
b) Si F: lvf __, Af es isometría, oriéntense M y ivi de manera que F
conserve la orientación (véase el comentario después del ejercicio 4).
Entonces,
1
ff _ J{ dM
JJM
=JiJJf F*(i< dAf) = JJlf
if K(F)F''(dM)
Sección 8
1. Si N es isomhrica a una esfera S de radio r, hágase ver que N es
compacta y que tiene K= 1/r2 • Por tanto, según el teorema ele
Liebmann, N también es una esfera de radio r, de manera que
una traslación nos exhibirá la congruencia de N con ¿;_
3. Con la excepción de las geodésicas, todos los casos se desprenden
inmediatamente ele la conservación de los operadores ele forma.
Sólo las geodésicas y la curvatura gaussiana necesitan ser conservados por isometrías arbitrarias (ejercicio 1 de VI.\ y el ele theore-
ma egregium).
5. b) El que se detemrina por -U.
9. Declúzcase del theorema egregium que una simetría euclidiana F
de M tiene que dejar fijo el origen, por lo cual F es ortogonal.
Considérese su efecto en el sistema natural de referencia en O.
Capítulo VIl
Sección
1 . b) <X 1 o <X 1 = <X 1 • <X 1 j g 2 (<X) es el cuadrado de la rapidez.
3. b) Sean E, y E 2 los campos vectoriales en x (D) determinados por
Xu/vE y v¡ :1 V !1, donde V= X¡;- (FjE)xu (el proceso de
Gram-Schmiclt).
5. a) Hágase ver que la definición J(Et) = E2, ](E2) = -El es mdependiente ele la elección del campo positivamente orientado de
sistemas de referencia. (Dos cualesquiera tienen la misma orientación
en el sentido que se definió inmediatamente antes de VII.1.4.)
b) Para J2 = -!, hágase ver que l(J(Ei)) = -Ei.
459
RESPUESTAS A EJERCICIOS IMPARES
7. a) F,,U 1 = fnU 1 + g 11 Uc, F,,U 2 = fvU1 + R1·Uc (aplíquese el f'JCl'ClC!O
6)'
b) La derivada compleja ele F = f + ig es dF 1dz = [n + igu. Por
tanto, la ma~nitucl dF 1dz es (f,/ + g,,") '", que se puede expresar
en formas difcn<>ntcs por medio de las ecuaciones de Cauchy-Ricmann.
1
1
1
Sección 2
3. A
=
;rr 2 1 ( 1 - : ) , (E, F, G calculada como en el ejemplo 4.11);
A(H)
=
w.
n
S. E =
= 1 y F = O, de manera que A = 4""· Podrmos definir nneyamente la estructura geométrica para hacer de E y G números positiYos.
7. Verifíquese que la parametrización Xc~ del ejercicio 5 ele \'I.5 es Jsometría.
Sección 3
1. Nótese que Ei = z1U i restringida a a es r sent U 1 ; por tanto, a' =
- E1 + cot ( t) E". Puesto que w 12 = du 1u eyaluado en a' es - 1,
deducimos ele la fórmula de la derivada covariantc que a" =
cot (t)I,.,1- cot 2 (t)E 2 •
3. En la demostración a que hacemos referencia, obsérvese que '''"l (V)
E" = -V' 1E3•E1E3 = S (V) ·ñ\E:;.
S. a) La demostración de VII.3.6 nos enseña que el ángulo de holonomía de a es
-J:
wda') dt = -
L
w12
Aplíquese el teorrma de Stokes, sin olvi(br que dw 12
mera ecuación rstructural) .
7. Y'= j'E 1
+ /o>
21
(a')E 2 , en COJl!'l'C'UCncia, F,(1''¡
=
=
j'lé·,
-K djVf (pri-
+
E1-
¡'n')lé.c.
F Y = Y = fE 1 , en consecuencia, Y' = f'E 1 + f0ct(F,,(1'')
Aplíquese VI.5.3.
11. H' tiene lon~itucl constante e; en cualquier región oricnt:~ble, húgase
ver que el ¿.ampo ele sistemas ele referencia E1 = Wlc, Ec =](El)
tiene forma ele conexión cero, y, en consecuencia, curvatura cero.
Sección 4
1. Debido a que a"= O, a(h) "= a'(h)h".
3. Aplíquese el ejercicio 6 de la sección 3..
460
RESPUESTAS A EJERCICIOS 1:\lPARES
5. Todas las circunferencias euclidianas que pasan por el polo norte, pues
corresponden, en la proyección estereográfica, a rectas clel plano.
9. Por medio de las ecuaciones de a' y a" que ;;c. cbn en el texto, tenemos
que J(a') = J(vT) = vN; en consecuenna, a"•}(a') =
11 . a) Para
13.
15.
17.
19.
Uo
::;
u :::; u t
-
E,
b) Si el encuentro tiene lugar, entonces a' y /3' son colincales; en
consecuencia, por VII.4.2, a y f3 son iguales ( ccl lllargen de la parametrización) ; esto es imposible.
a) en la 1nrametriznción habitunl de un :e superficie de reYolución,
e= h" (h es la distanci:c :el eje ele revolución)' y las cun·as u-paramétric:cs son los meridianos; por comi¡.;uiente, la inclin:cción e es
h sen cp.
b) Este resultado se desprende ele los ejercicios 11 y 12, puesto que
esa paralela es una curva ele barrer::t.
Es obvio que los meridianos se aproximan ::tl borde (en una dirección). Aplíquese el ejncicio 13 para wri ficar que cualquier otra
geodésica 'e cort:L con una cun·a ele barrna y se acerca al borde
en ambas direcciones.
[sen cp 0 [ < 1/cosh u 0 •
a) Empl6eseVI.2.4, (b) 1{ 1
O, K"
h'jh.
Sección 5
l. p(O,p) =tanh-'CIP:i/2), norma euclidiann.
3. Las geodésicas son hélices y y(u.n) = /'""' ,.,.,(1)
5.
7.
9.
11.
=
(rcosujr,
r sen :1 r, u). J ,;1 mayor vecindad normal es r¡ccr; y es n~gular para
cualquier E, pero la cw1dición de inwcti·iclad deja de cumplirse
cuando E> ;-;-r.
a! Si q está en YJ entonces, JlOf :J.:l. p(p, q) <E. Si q no está en r¡,
hav una cun·a desde p ],asta q que ::e corta con Ce~ para toda 8 < E.
b) Si p of= q, del nxioma de Hausdorff se desprende que hay una
vecindad norm:ll ele p que no contiene a q: en consccuenna,
p(p, q) >O.
La long-itud L ele e: desde O hasta r + E es igual a la de b curva
quebrada: (3 desde íJ h;tsta r y, a continuación a clcscle r hasta r + E.
En cousccuenci:t, L > (l(rt(O), a(r +E)) según el comcn1:1rio :cntcrior a :J .8.
D: u" + v" < 1, con estructura geométrica euclidiana.
a) Hay solamente un segmento geodésico (un meridiano) desde p
hasta cualquier otro punto.
RESPUESTAS A EJERCICIOS IMPARES
401
Sección 6
5. a)
X 11 t0,v) =X(n), y, puesto que x(O,;•) =¡'x,, 1 (0) =cfJ(v), tenemos que x,. (O, v 1 = (5' ( v). Por tanto, ¡~·e - P c., distinto ele cero
cu:-tndo u = O, ;;. por continuicbcL para ]11 pequeíío.
b) (iii) f3 una curva base, X = o.
7. a) Las cury;:s v-parÚll!etro son nu~ricli:mos ele lcmgituJ.
1
b) Puesto que K= O, b ecuación ele ]<1cobi se \uchc (\((:Juu =O,
en consecuenci:1, y G es lineal en
G(u, z•) = 1- K,1 (¡·)u.
11.
y de ello se desprende que
Sección 7
1. Si N es geodésicamente completa, fí jcsc un punto p de: M; entonces,
hay un segmento geodésico y,. desde F(p) hasta un punto arbitr;;rio
q de .N. Pero, si ves t2l que F:,(v) = w, tendremos que F(y 1 l = Yn·,
con lo cual se ve que (I e'itá en F ( Jf).
3. Si p 'F q en )\!, entonces cualquier sl·gmento gecd(:sico u que ,·aya
desde p h:tsta q tiene rapidez distinta ele n·ro. En con':ecut'ncia,
F (u) es geodésica no constante desde F ( p) h:;sta F ( q), y de ello se
desprende que F(p)
F((J), aun cuando intf'rpretcmos ''dos" como
"dos diferentes'' en la propiedad de unicidad de N.
5. Es una variación de \'II.7.3.
7. Para nT que una superficie ;\[ no es horuogl-ar:a con respecto a los
sistemas de referencia, es suficiente ( ~.egún la argumentación que se
hace en d texto acerca del cilindro) verificar que en 1\I hay aLc:,unas
geodésicas que son uno a uno junto con otras que no lo son. Obs(Tvese
que la x de VII.2.5 es isomctría local.
9. Si 1~ es la longitud de arco de la elipse, \·erifíquese que F(x(u, v))
= x (u + (L/ 4), ¡•) es isometría ele }vf que no conserva la distancia
euclidiana.
11. De acuerdo con el ejercicio 8 ( b), F es la restricción a ::S de una transforn tación (ortogonal) lineal; en consecuencia, F ( - p) = - F ( p) . Es
;¡sÍ como podcmos definir F { p, - p} = { F ( p L F (- p)}, y deducimos
l:1 homogeneidad con respecto a los sistemas ele referencia de :S: a partir
ele la cJp ~.
·
13. L2 función es homomorfismo; es, por tanto, suficiente que demostremos
que <:s 11110 a uno. Pno, en la demostración de VI.8.3, si Af no es de
planicie (y si, por tanto, S=/= O), entonces F es única.
Sección 8
l. En a) y e), la superficie es clifeomórfica a una esfera, de manera que
TC = 4:7. En b), hay cuatro asas, a lo que se debe que TC = -12,..
462
RESPUESTAS A EJERCICIOS IMPARES
3. a) Para h = 1: si K no fuese nunca cero, entonces, de acuerdo con
un ejercicio anterior, o bien K > O, o bien K < O; ambas cosas son
imposibles, puesto que, por VII.8.9, })M E dé\1 = O.
b) Por \ 1.3.5, K tiene valor positivo en alguna parte. Pero JI tiene
por lo menos un asa, de manera que
en consecuencia, hay alguna parte en la que K es negativa.
5. }/,.,1< dA1 = - f,x K 1 ds = r./4v2
7. a) Si x 1 , • • ·, xk es una descomposición positivamente orientada. entonces, por el teorema de Stokes (IV.6.~J), tenemos que J~ .dr¡, =
1
~ JJx, dq, = ~ J,x, q>. Pero, con respecto a las aristas que no están
en r!P, IV.6.6 n'sulta en una cancelarión por pares.
e) Si Xi y Yi son dos desromposicioncs positivamente orientadas,
entonces, según el comentario posterior a VI. 7 .5, vemos que
(a) =) ( b) : cualquier estructura geométrica (que exista) en M se
puede modificar ele manera que el campo \TCtori;ll no nulo T:, sea
de longitud unitaria; entonces, F,, ](E 1 ) es un campo de sisttemas de
referencia. Se ddine sn forma de conexión en la totalidad ele la
supé~rficie, y, por tanto, 2"X (1\1) = Jhr K dA! = - f(,r d"''" = O.
11. Es consecuencia del ejercicio 8.
13. Por la propiedad de unicidad de las geodésicas, los ángulos interiores
dr~ un polígono de geodésicas no pueden ser +.,.. (es decir, no hay
cúspides), de manera que -" < E < "· Aplíqtwse el ejercicio 11.
b) todo n =1= 1 (si n = O, un gran círculo) .
9.
In dice
Campo de sistemas de rdcrcncia
adaptado, 2B2
en E", 99
en una cun·a, 144
en una superficie, 28 7, 351
natural, 19
principaL 291
transferido, 312-313
Campo esférico ele sistemas de referenCJa, 100
adaptado a la esfera, 231-:235, 317319
dual y fnrmas de conexión, 113-114
Campo natural de sistemas de referencia. 19
Campo principal de sistemas de referencia. :!91
Campo toroidal de sistemas de referencia, 102 (ejercicio 4), 114
(ejercicio), 2fl6-28 7
Campo transferido de sistemas de referencia, 312
Campo vectorial
en el espacio euclidiano. 18
en una curva. 66-68, 367
en una superficie de E", 173-175,
1 77 (ejercicio 12)
normal, 173. 175
tangente, 173, 175
en una superficie abstra~ta, 212
Campo vectorial euclidiano, 173
Campo vectorial normal, 173
Campo vectorial normal y unitario,
208 (ejercicio 5), 220
Campo vectorial paralelo, 68-69, 36+
Característica de Euler-Poincaré. 433434
Caras, 431
Carta, H9-162
abstracta, 211, 213
Aceleración, 68, B3
de una cun'a en una superficie, 227,
(ejercicio 3)
intrínseca, :16 7
Análisis vectorial, 43 (ejercicio 8)
Angulo, 57
exterior, 428
interior, 428
orientado, :n+
que forman los CJCS de coordenadas,
242
Anr;ulo exterior, 423
Angulo interior. +28
Angulo 01 icntado, 334
Angulo que forman Jos ejes ele coordenadas, 242, 253 (ejercicio 81
Aparato ele Frenet, (ejercicio 1), il7
Aproxin1ación cuadrática, 233-23G
Aproximación de Frc·net, 75, 76, Bl
(ejercicio 9)
Arca, 435-H 1
Arca algebraica, 331-332, '141 (ejercicio 6)
Asa, 3B2. 431. 437
Axioma de Hamdorff, :~ 15 (ejercicio
5), 396 n
Binonnal, 72. 82, 85
Borde (cuna del), 19B, 427, 432
Campo adaptado ele sistemas de referencia, 282-213 7
Cam¡n asociado de sistemas de referencia, 316-313
Campo cilíndrico de sistemas de referencia, 99-101
formas de conexión, 107-108
1-formas duales, 115 (ejercicio ·J.)
+63
464
ÍNDICE
cálculos geométricos de una, 2-t2-H9
de Mongc, 152
ortogonal, 253 (ejercicio 9), 316-
321
princip:ll, 25é~ (ejercicio 9), 321
(ejercicio 4)
propia, 14'l, 17[; (ejercicio 14)
Carta conforme, 309 (ejercicio 7), 320
(ejercicio 2)
Carta de coordenadas, véase C:1rta
Carta de ~.Iongc, 151, 252
Carta geográfica, 160-161
Cartan, E., 55, 111, 115, 347
Catenoidc, 271
como superficie mínima, 271-273
curvatura g::mssiana del, 271, 275
total, 3 29-330
curvaturas principales del, 271
isometrb local en el, 306-308
map2o de Gauss del, :n9 (ejercicio 20)
Centro de curvatura, BO (ejercicio 6)
Cilinc:w, 154, 266 (ejercicio 11)
geodé-sicas del, 315 (ejercicio 2),
103 (ejercicio B)
pararnctri?ación del, 163, 166 ( ejercicio 6)
Cinta de Méibius, 207, 209 (ejercicio
7)
Círc\•lo oscnlador, 80 (ejercicio 6)
Circunferencia, 74·. 77
Circunferencia polar, 39G, 412-•1-13
Congruencia ele cun·as, 13B-146
determinada por la curvatura y la
torsión, 145
Congruencia de superficies, 22[), 3•1 03"17
C"njunto abierto, 15, 56, 178
Cono, 166 (ejercicio 5), 266 ( ejercicio 11)
Conoide, 26il (ejercicio 20)
Coordenadas isotérmicas, 320 ( ejercicio 2)
Coordenadas ortogonales, 316-321
fórmula de curvatura gaussiana de
las, 3 ~o
Cuasicarta, 322
Curva, 26
cerrada, 197
cerrada y simple, 177 n
en una superficie, 170-171
expresión en coordenadas de una,
170
no parametrizada, 31-32
periódica. 31
plana, 76
regular, 31
uno a uno, 31
Curva de rapidez unitaria, 6·1
Curva d ircctriz, 16G
Cun·a esférica, 7B, 81 (ejercicio 10)
Cun·a guía, 267 (ejercicio 14)
Curva irnagcn: 1.S
Curva integraL 215-216
Curva principaL :.:s 7-259, 261-:267,
302 (ejercicio ·l)
Cur\'::t r::'gul:tr~ 31
Cun·as
Cun·as
Curvas
Curvas
asintóticas, 260-2G 1, 265
ele Dupin, 2•10 (ejercicio 5)
paralelas, 13'l
para\lll'tricac, 1'J'l
Curvatura g~Ht':lsi:1na total de una cur-
va, T~B-TJ:l. 4:15-·HO
de una cute>. 373 (ejercicio 5)
el mapco de Gauss y la, 333
la característica de E ulcr-Poincaré
y h. EH
la holonornía y la. 3 73 (ejercicio 5)
Curvatura gaussiana . ::.:3 11--:239, :J:-JG-:358
i}éanse Indiúclualmcntc también
las Sll])('rficics
clifercnciabilidacl de la, 23B
el inten·alo ele la, :ll5 (ejercicio 3)
en la ecuación ele Jacobi, 407
el mapco g·ausc;iano y la, 331
el operador de forn1a y 1::-t, 23+
el signo de la, 2'\6-:.'3 7
fórmulas ele la
explícitas, 2:18, 245, 250, 290, 313
implícitas, 237, 28'l
la cur\·atura geodé,gica y la, 389
(ejercicio 19)
la holonomía y la, 373 (ejercicio 5)
la invariancia isométrica de la, 31 'l-
31G
las cirnmfcrencias polares y la, 411-
413
las cmYatums principales y la, 234
hs discos polares y la, (ejercicio 2)
Curvatura geodésica, 265 (ejercicio 7),
377-379, 387 (ejercicio 9)
total, 426-+27
Curvatura media, 234. 237-240, 245,
~50,
289
Curvatura normal, 225-234, 251 ( ejercicio 14)
signo de la, :.' ~ 9
·Curvaturas principales, 230-239
corno valores característicos, 231
fórmula de las. 23B
Curvatura total de una curva, 'l3 ( ejercicio 16)
ÍNDICE
Curvatura total geodésica, 426-430, 443
(ejercicio 4), 444 (ejercicio 15)
Curvatura, véase también Curvatura
gaussiana
de una curva en E2, 80 (ejercicio
8)' 146
de una curva en E'l, 72, 80, 85
Darboux, 98
Delta de Kroneckcr, 35, 58
Derivada covariante
en una cart:J, 244, 372-:JH
cuclicliana, 9-t-9 7, 138 (ejercicio 5),
~~0-22
L
3GU
intrínseca, 365, 3 74
Derivada de un campo vectorial euclidiano, 11:1
Derivada direccionaL 22-2~l. 175
cálculo ele la. 2:1, 37
Derivada exterior, 40-~13, 43-·H, 181182
Desarrollo ortononnal, 58-60, 101
Descomposición rcctangubr, '132
Dcsigttalcbd del triúngulo. 398
Desigualdad ele Sch\\'arz. 57
Difcornorfismo, 51, 53 (ejercicio 11),
189
Difcrcnciabilicbd, 1+, 21, 45, 169, 171172
Diferencial, 3+-:18
Dirección, 172
Direcciones asintóticas, 259, 261
Dirección principal, 230
Disco polar, 413 (ejercicio 2)
Distancia euclidiana, 56, 62 ( ejercicio 2)
Distancia intrínseca, 302-30"1, 309
(ejercicio 3), 402
Dominio, 1O
Ecuación ele Gauss, 285
Ecuación de Jacobi, 407-cWfJ. ·111
(ejercicio 6)
Ecuación de simetría, 285
Ecuaciones de Cudazzi, 285, 293
Ecuaciones ele conexión
en el espacio euclidiano, 104, 240
en una superficie, 284, 365
Ecuaciones estructurales
en E", 111-112
en una superficie, 285, 289, 33·t,
357-358
E. F. G., 166 (ejercicio 2), 242, 364
Elipsoide, 168 (ejercicio 1O)
465
curvatura gaussiana del. 2."10-232,
:'55 ( cje!·cicio 19)
grupo de isometrías del, 4· 18
puntos umbilicales ele!, 25'i ( ejercicio 2~))
simetrías euclidianas del, 346 ( ejercicio 10)
Enlosado. :;:z.J, +:12
Escala, 30:1
Esfera, 15:;
caractc1 i1aciones geornetncas ele la,
29'>. 297, 300
carta gc:¡gráfica de la, 160-161, 318:JJ 9
con asas. 434
curvatura ganssiana de la, 239, 253
(ejercicio -1)
290, +13, 413 (ejercicio 2)
estructuras gcornétricas de la, 4-3B
geodésicas ele la, 263-26·1, 397-398
holonomía, 371-3 72, 386 (ejercicio
4)
homogeneidad de sisteinas de referencia, 423 (ejercicio (i)
isomctrbs locales ck la, 41 -,_ 118
operador ele fon11a: 221-21:2
propiedades topológic:J.o,, ::0-1-206,
433
puntos conjugados de la. 406, 409411
rigidez, :H5 (ejercicio 1)
simetrías t'L!clidianas ele la, 346
(ejercicio 8)
Esfera estereográfica, 360, 38G ( ejercicio 5)
EsfC'ra unitaria. 150
Espacio euclidiano, 13, 15
Espacio ta;:gcntc, 17
Estructura gcmnl,trica conforme, 350:15 L 354 (ejercicio 1), 3:i8-359
Eudiclcs, 381<185
Evoluta, 92 (ejercicio 15)
Expresión en coorclcnaelas, 169, 192
(ejercicio 6)
Flexión, 307, 315 (ejercicio 5)
Fonna ele área, 324-325, 334, 355
(ejercicio ·1)
Forma diferencial
cerrada o exacta. 184 (ejercicio 2),
201. ::o3
en E 2 , 183
en E3, 33-43
en una superficie, 17 8-18·1
retroacción ele una, 190
466
ÍNDICE
Formas de conexión
en el espacio euclidiano, 102-108
en una superficie, 284, 312, 317, 351
Forma, véase Forma diferencial
Fórmula consistente de un mapeo, 193
(ejercicio 10)
Fórmula de Euler, 299
Fórmula de Gauss-Bonnct, 429-431,
4 38--110, 444 (ejercicio 11)
Fórmula de la derivada covariante, a
(ejercicio 5), 219-220, 368
Fórmulas de Frenet, 73, 83
Fórmulas de las bases, 28 7
Frenet, 98
Frontera
de una región, 411
de un 2-segmento, 198
Función, 9-1 O
sobre, 1O
uno a uno, 10
Función angular, 64- (ejercicio 12),
338 (ejercicio 15)
Función compuesta, 9
Funciones coordenadas euclidianas, 19,
26, 35, 45, 67
Funciones coordenadas naturales, 14
Función inversa, 1O
Función normal unitaria, 24+, 421
Función soporte, 251, 255. 293
como campo vectorial normal, 174,
249
Grado
ele una forma, 39, 178
de un mapeo, 441 (ejercicio 6)
Grupo, 123
ele isometrías. 418
de simetrías euclidianas, 3.46 ( ejercicio 7)
euclidiano, 123
ortogonal, 124
Grupo de isometrías, 418
Haz tangente, 214
Hélice, 26, 73-H. 142
Hélice cilíndrica, B8-92
Helicoide, 167 (ejercicio 7)
Cálculo de las cartas del, 246-247
como superficie reglada mínima, 261,
268 (ejercicio 22)
isometrías locales del, :J 06, 315-316
mapeo ele Gauss en el, 339 ( ejercicio 20)
Hiperboloide elíptico, 16B (ejercicio
10)
Holonomía. 3 71-3 73
ángulo de, 3 71
la curvatura gaussiana y la, 373
(ejercicio 5)
Homotópica a una constante (curva),
20:i
Gauss, 281, 3H, 347
Geodésicas, 262-267, 374-416 también
véanse Individualmente las superficies cerradas, 266 ( ejercicio 13)
en superficies de cun·aturas no positivas, 41 O, 444 (ejercicio 13)
existencia y unicid:>d de las, 376
extensión ele las, 40·1-406
fórmulas de coordenadas ele las, 3 75-
:382
los sistcm;¡s de referencia y las, 286
(ejercicio 1)
propiedades de minimización de la
longitud de las, 389-4-11
su conscn·ación por las isometrías
(locales), 316
(ejercicio 1). 37+, 415-416
Geometría euclidiana, 133, 349-350,
354
Geometría intrínseca. 311. 349
Geometría riemanniana, 354, 354-446
Gradiente, 44 (ejercicio 8), 61 (ejercicio 11)
Hopf. Hl, 444
Identidad de Lagrange, 241 ( ejercicio 6)
Imagen, 9
Irnagen esférica,
de una curva. B 7, 92 (ejercicio 11)
de una superficie, véase Mapco de
Gauss
Inclinación de una geodésica, 379, 387
- Indice, 202 (ejercicio 5)
Inmersión isométrica 4 20-·123
Integración de formas diferenciales,
195-204, 324-3-10
1-forrnas en regiones orientadas, 326,
335 (ejercicio 4)
1-formas en !-segmentos. 195-197,
200-201
2-fornns en 2-segmentos, 197-200,
202 (ejercicio B) 339 ( ejercicio 21)
Integral de funciones. 327, 335 (ejercicio 4)
467
ÍNDICE
Integral impropia, 326-327
Intervalo abierto, 26
Invariante isométrica, 311, 349
Inserción isométrica, 420-42 2
Isometría del espacio euclidiano, 11 7133
mapa de derivadas, 124
su determinación ;ncdiante sistemas
ele referencia, 125
teorema ele descomposición, 120
Isometrías ele superficies, 302-305, 310,
315, 351
las inmersiones isométricas y la, 420
las isometrías euclidianas y la, 340343
Isometría local, 303-309, 415-418
criterio de la, 305, 303 (ejercicio 1),
309 (ejercicio 1O)
de superficies de curvatura constante, ·116
su dctenninación mediante sistemas
de referencia, 415
Isometría que conscn·a (invierte) la
orientación, 130, 339
Isomorfismo canónico, 17-13, 57, 74·
Jacobiano, 330, 336 (ejercicio 8), :l33
(ejercicio 1 7)
J (operador ele rotación), 355 ( ejercicio 5)
Lema de Hilbert, 299
Le\·i Ci\·ita, 369
Ley ele los cosenos, 424 (ejercicio 10)
Línea ele curvatura, véase Curva principal, 1, m, n, 244-245
Longitud
de un segmento ele curva, véase Longitud de arco
de un vector, 57
Longitud ele arco, 63-66, 253 (ejercicio 7)
función de la, 65
Mapa el" derivadas, 47-53
ele una carta, 176 (ejercicio 4)
ele una isometría. 1 :2·+
de un mapeo ele superficies, 187Ul8, 194
M apeo
de espacios euclidianos, 44-54
de superficies. 185-193
ele Wcingarten, ;·éase Operador ele
fonna
antípoda, 192 (ejercicio 5)
conforme. 307-310, :l56
de Gauss. 224-226, 331-333
identidad, 118
polar geodésico. 390-391
que conserva el área, 338 ( ejercicio 16)
Mapeo regular, 51. 138
Matriz de disposiciones, •59, 106
Matriz jacobiana, 49
.. Matriz ortogonal. 172
Minimización de la longitud de arco,
390
Minimización local ele la longitud de
arco, ·10-l-41 O
. Movimiento rígido. véase lsometría del
espacio euclidiano
Multiplicación escalar, 13-18-19
Mapeo
Mapeo
Mapeo
Mapco
Mapeo
J\1apco
i\Jorma, 56
Kormal principal. 72, 82, 35
N-polígono. 443-4H
Operación de corchetes, 98 (ejercicio
7), 226 (ejercicio 9)
Opcradm de forma, 220-225
Campos de sistemas ele referencia en
térntinos deL 284
comD derivada del mapeo ele Gauss.
:131
demostración de simetría del, 245246, 287 (ejercicio 6)
ele una superficie inmersa, 4 21
la curvatura normal y el, 2 2 7
las curvaturas gaussiana y media y
el, 2:l5
las derivadas cm·ariantes y el, 3 72
(ejercicio 3)
los vectores y las curvaturas principales y eL 2:11
polinomio car:1cterístico · del, 240
(ejercicio +)
su consen·ación en las isometrías euclidian<1S. 31G-341
Orientación
ele campos tangentes ele sistemas ele
refcrcnci<l. :133
de una carta. :l26
de un:r superficie. 226, 325
de un enlosado. 326
de un sistema de rcfprcncia, 127
que determina una carta, 428
468
ÍNDICE
Paraboloide elíptico, 16él (ejercicio
11), 253 (ejercicio 6)
ParaLoloide hiperbólico, 16~) ( ejercicio 12). 253 ( ej2rcicio 6)
Pararnctrización canónica. 2 73
Paramctrización ele C!airut, 3 79-309
Paramccri¿aciéln de Liouvillc, 388
(ejercicio 1il)
- Paramctriz;lc1.t'nl de una curYa. 32
Paramctrización en una supcri'icic, 161
criterios de regularidad, 1G2, 166
(ejercicio 2)
susceptible de descomposición en cartas, 193 (ejercicio 9)
P::trametrización polar, ¡;codésica, 391394
Parámetro de clistri!JUción, 267
Parte vectoriaL 16
Plano cartesiano. :151
Plano en E", 75, 157 (ejercicio 2),
263, 294
Slt identificación con E:!, 151
Plano cstcrcogr:ífico, :160
P~:1no euclidiano, l:"J, 3:!0, 33·!-385
isomctrías locales del, 415-117
Plano hiperb(,]icn, 362<l6:)
complctitucl gc:;clésica del, 402 ( ejercicio 1)
de pscudorradio r, :16-1 (ejercicio 4)
geodésicc¡s del, 3fl:l-:í85
isonwtría; ele!, -1~:-J (cjcn;ci'J lc1)
isometrías locales del, 416
Pbno oscu'Clc:or, 7G
Pbno proyectivo, 2U-21 2
estructura geométrica del, 36·} ( ejercicio 6)
geodésicos del. 386 (ejercicio R)
mapeo (proyección) natural del,
212
propiedades topo!ógic:1s del, 215
{ ejcrcicin 2)
Sil homogcncichd, 42•1 (ejercicio 11)
Plano tangente, 172, 177 (ejercicio
'l)
Postul:<do ele ]"s paralelas, 385
Prr·"c·odésic::l, 3 79
Principio ele operar punto por punto,
18
Producto cartesiano, 216 (ejercicio 9)
Producto interior, 349, 362-36:l
Producto interior inducido, 353. 359
Producto punto, 55-57, 99, 2+2
1-formC!s duales, 110-111, 284, 351
ql!t: consen·an las isornctrías, 125
Producto tilde, 39-~10, 179
Producto vectorial, 60-63, 128, 131
Propiedad ele Leibniz, 24
Propic·cbdes topolhgicas, 20+-211, 435 n
Proyección ele l\Icrcator, 311 ( ejercicio 13)
Proyección estereográfica, 187, 190
con1o rnapeo conforn1c, 311 (ejcrcicio 14)
Pseudoesfer:1, ,-éase Trompeta
Punto conj11gctdo, 405-411
Punto de Clp!icación, 16
Punto de pbnicic, :237
Punto f"cal. •1 J 5
P11ntos antípoclas, :_: 1O
Puntos
nnit::tri(J~;.
,1 G
(ejercicio
Punto urnbilic:1l, :231, :251
1~)),
véase
ianz!n/n
S!Iprrficic
tot:1lmente umbilical
Rapidez, 65
Rayo, J 65
Recta, 26. 29, 69, 26+ (ejercicio 1)
IJropicd:Hlc:i J;; nlinin1izaciéln ele la
]o¡lgitml de la, 6') (ejercicio 1)
Rcc1.a t:mgcntc, 33 (ejercicio 9)
Reflexión, LJO
Región pcdi:mn:1l, "141
Región simple, 337
Regb ele ~dt~rnc¡ción, 38, 61, 1 7')
Rep;:¡r;:¡rnetrización, 29
de rC!piclcz unitaria, 65
monótona, 70 (ejercicio 1O)
que conscr\·a ( inYicrte) la orientación, G6
r. eparalTICtrÍZL1CÍÓ11 qU{' C(Jl1SC1Ya (invierte)
la orientación,
fiG
Retroacción, 1 'JO
Ricmann. H9, 385
Rigidez, 315 (ejercicio 1)
RotC!ción, 21 (ejercicio 4)
Secciones tnnsversales, 16:3
Sección normal, 228
!-segmento, 195
2-segmento, 197
Segmento de curva, 70 (ejercicio 10),
195
Segmento más corto de curva, 390
Semiplano ele Poincaré, 354 ( ejercicio 2)
circunferencias polares del, 402 ( ejercicio 2)
curvatura gaussiana del, 363 ( ejerC!CW
] )
gt=odésicas del, 386 ( 2jercicio 6)
469
ÍNDICE
isométrico al plano hiperbólico, 425
(ejercicio 15)
Serret, 98
Signo de una isometría, 129
Silla de montar, 168
cálculo de las cartas de la, 247-249
doblemente reglada, 261
simetrías euclidianas de la, 346 ( ejercicio 9)
vectores principales de la, 254 ( ejercicio 11)
Silla de montar ele mono, 15 7 ( ejercicio 6), 237, 266 (ejercicio 9)
curvatura gaussiana del, 253 ( ejercicio 5)
Símbolo de Halmos, 19
Simetría euclidiana. 346-34 7, 418
Sistema de coordenadas, 1fl5 ( ejercicio 9), 316-:l1B
Sistema ele referencia
Sistema de referencia de Frenet, 72
Sistema ortonormal ele referencia, véase Sistema de referencia
Sobre, 10
Subconjunto. 9
Superficie
abstract<J, 210-213
en E", 150, 35 L 420
definición implícita, 152-153
geométrica, 350
inmersa, 41
Superficie cerrada en E3, 21 () ( ejercicio 10), 302 n
Superficie compacta, ~204-20:!, 297-298
Superficie completa, ¡·éase Superficie
geodésicamente completa
Superficie c"ncxa. 20+
Superficie cuáclrica, 168. :13 7 ( ejercicw 10)
Supcrricic de Enneper, 25} (ejercicio
1:2)
Superficie de revolución, 15·1-156, 269280
;Ín:;t_ :¡::; -t ( ej crcicio 2)
acm1entada. 158 (ej.·rcicio 12)
campo natural de sistemas de referencia de una.
~3:~0
caracterización local de una, 31 O
(ejercicio 12)
curvas principales, ~5'!, ~70
curvatura gaussiana ele una 270.
273, 278, 279 í ejercicio' 5)
,
curv;¡turas principales, ~70
curvatura total, 3:15 (ejercicio 5)
ele curvatura constante. 271-277, 280
ejercicio 0), 336 (ejercicio 7)
geoMsicas
ele
una,
387
(ejercicio
U)
meridianos y par~lelos en una, 156
par3.rnetrización ele una
canó:Jica, 273
especial, 160 (ejercicio 13)
habitu;ll. 16'1-165
propiedacks topológic!:ls, 21 O ( ejercicio 14)
tipos ele elifeomorfismo de una, 216
(ejercicio il)
Superficie de Schcrk, 255 (ejercicio
21)
carta en la, 3·}6 (ejercicio 11)
mapeo ele Gauss de la. 330 ( ejercicio 20)
Superficie geodésicamente completa,
:302n, :176-3/fl
los segmentos geodésicos mas cortos
en la, 399
Superficie geométrica, 350, .J.J r
Superficie geométrica estándar, 415.¡ 19
Superficie homogénea, 419-422, +24·
Superficie homogénea con respecto a
los sistemas de referencia, 419
Superficie inmersa, 216 (ejercicio 1O),
252, 121
Superficie llana, 240, 266 (ejercicio
11), 263 (ejercicio 2)
Superficie mínima, 240, 315 ( ejercicio 5)
ele revolución, 271-273
ejemplos ele, 273
llana, 301 (ejercicio 1)
mapeo ele Gauss ele una, 336 ( ejercicio 6), 339 (ejercicio 20)
rcghda, :2G8 (ejercicio 22)
Superficie orientable 204·-206, 214
( :·j ~rcicio 1)
Superficie reglada, 166-1 G8, 261, 2662(JB
cnr\·atura gaussiana total de una,
226 (ejercicio 9)
no cilíndrica, 267 (ejercicio 14-)
Superficie simplemente conexa, 204,
·116
Superficies isom{iricas, 3C-}
Superficies paralelas. :• 11. :'-12
Superficie tangente, :.'GG ( cjc,rcicio 11)
isornetrías de una, :JO') (ejercicio 5),
31.5 (ejercicio 2)
Superficie totalmente umbilical, 294~07
Tangente unitaria, 71, 31, 85
• Tensor métrico, 350
470
ÍNDICE
Teorema de Gauss-Bonnet, 435-438,
4+2 (ejercicio 8)
Teorema de Hilbert, 302
Teorema de la función inversa, 51,
188-190
Teorema de Licbman, ·114
Teorema de Stokcs, 198-200, 4-12 ( ejercicio 7)
Theorema egrcgium, 311-315
Toro de revolución, 165
cálculo de las cartas del, 270-271
característica corres pon di e n te de
Eulcr-Poincaré 434, 442 ( ejercicio 9)
curvatura gaussiana del, 236-2:17,
270-271
curvatura gaussiana total del, 329,
:l33
mapeo de Gauss del, 225 (ejercicio
5)' 332-333
para;nctrización habitual, 165
Toro plano, 362. 364 (ejercicio 5),
424 (ejercicio 7)
su inserción m E>, 422
Torsión, 73, 82
fórmuh de, 85
signo de la, 136-13 7
Transforrrwción crtogonal, 119
Traslación, 117-119. 130
Traslación paraJe la, 3 71
Traslapamicnto liso. 172, 211
Triánguh, 13tl-4-l0
Triple producto escalar, Gl-63. 130
Trompet<t 277-2/iJ, 2iJCJ (ejercicio 9),
323-:l24, :Ln
Tubo, 255 (ejercicio 1(j)
l!no a uno, 14
Variedad, 21 3<216
Variedad ricmanniana, 353
Vecindad, 56, 150
ncnnal, 391
\lcctorc:~
ortogonales, 57
Vectores paralelos, 16
Vectores principales, 230, 254 (ejercicio 1O), 256 (ejercicio 22)
como \'ectores característicos, 231
\7cctor tangente
a E·', 16, 26
a una superficie, 172, 212-213
Vector unitario. 58
Vector, uéase Vector tangente
Velocidad, 2B-29. 212-213
V clocidaclcs parciales, 160, 162, 172
V clocidad inici:tl. 3 2 (ejercicio 6)
-Vértices, 't27-"12tl