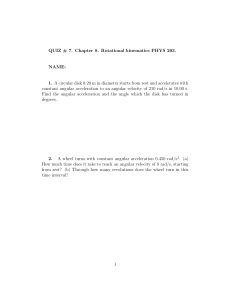
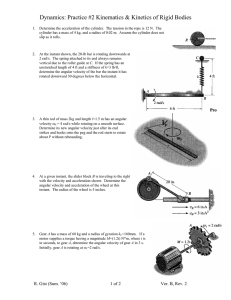
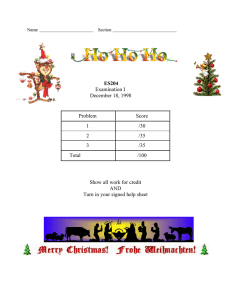
Chapter 18. Homework problems 18.3 General expressions for velocity and acceleration You will also need to pick a range of times. Your plot should include the instant at which the bug walks through the origin. Make sure your and - axes are drawn to the same scale. A computer plot would be nice. Calculate the radius of curvature of the bug’s path as it goes through the origin. Accurately draw (say, on the computer) the osculating circle when the bug is at the origin on the picture you drew for (a) above. Force. What is the force on the bugs feet from the turntable when she starts her trip? Draw this force as an arrow on your picture of the bug’s path. Force. What is the force on the bugs feet when she is in the middle of the turntable? Draw this force as an arrow on your picture of the bug’s path. 18.3.4 Arm OC rotates with constant rate . Disc D of radius rotates about point C at constant rate measured with respect to the arm OC. What are the absolute velocity and acceleration of point P on the disc, and ? (To do this problem will require defining a moving frame of reference. More than one choice is possible.) 18.3.3 A small bug is crawling on a straight line scratched on an old record. The scratch is a distance cm from the center of the turntable. The turntable is turning clockwise at a constant angular rate rad s. The bug is walking, relative to the turntable, at a constant rate cm s, straight along the scratch in the -direction. At the instant of interest, everything is aligned as shown in figure. The bug has a mass gram. a) What is the bug’s velocity? b) What is the bug’s acceleration? c) What is the sum of all forces acting on the bug? d) Sketch the path of the bug in the neighborhood of its location at the time of interest (indicate the direction the bug is moving on this path). 18.3.5 For the configuration in problem 18.3.4 what is the absolute angular velocity of the disk, ? b) c) d) e) y ω vB/T bug x 981 y z x ωD , ω̇D C D a B E a) Pick a suitable moving frame and do the problem. b) Pick another suitable moving frame and redo the problem. Make sure the answers are the same. disk D # r ω1 O C ω2 P θ Filename:Mikes93p1 Problem 18.3.4 18.3.6 For the configuration in problem 18.3.4, taking to be the angular velocity of disk D relative to the rod, what is the absolute angular acceleration of the disk, ? What is the absolute angular acceleration of the disk if and are not constant? Filename:Mikes93p2 Problem 18.3.7 18.3.8 A small kg toy train engine is going clockwise at a constant rate (relative to the track) of m s on a circular track of radius m. The track itself is on a turntable B that is rotating counter- clockwise at a constant rate of rad s. The dimensions are as shown. At the instant of interest the train is pointing due south ( j) and is at the center of the turntable. a) What is the velocity of the train relative to the turntable B ? b) What is the absolute velocity of the train ? c) What is the acceleration of the train relative to the turntable B ? d) What is the absolute acceleration of the train ? e) What is the total force acting on the train? f) Sketch the path of the train for one revolution of the turntable (surprise)? ˆ North 18.3.7 A turntable oscillates with displacement sin . The disc of the turntable rotates with angular speed and acceleration and . A small bug walks along line with velocity relative to the turntable. At the instant shown, the turntable is at its maximum amplitude , the line is currently aligned with the -axis, and the bug is passing through point on line . Point is a distance from the center of the turntable, point . Find the absolute acceleration of the bug, . turntable, B track 1m East O ı̂ Filename:pfigure-f93f4 Problem 18.3.8 ! 18.3.9 A giant bug walks on a horizontal disk. An frame is attached to the disk. The disk is rotating about the axis (out of the paper) and simultaneously translating with respect to an inertial frame Filename:pfigure-blue-55-2 Problem 18.3.3 Mechanics Toolset, Statics, and Dynamics, c Andy Ruina and Rudra Pratap 1994-2018. Problems END-OF-SECTION PROBLEMS 15.220 A flight simulator is used to train pilots on how to recognize spatial disorientation. It has four degrees of freedom and can rotate around a planetary axis as well as in yaw, pitch, and roll. The pilot is seated so that her head B is located at r 5 2i 1 1j ft with respect to the center of the cab A. Knowing that the cab is rotating about the planetary axis with a constant angular velocity of 20 rpm counterclockwise as seen from above, and pitches with a constant angular velocity of 13k rad/s, determine (a) the velocity of the pilot’s head, (b) the angular acceleration of the cab, (c) the acceleration of the pilot’s head. y Planetary axis Yaw B A Roll Pitch x z O 8 ft Fig. P15.220 and P15.221 15.221 A flight simulator is used to train pilots on how to recognize spatial disorientation. It has four degrees of freedom and can rotate around a planetary axis as well as in yaw, pitch, and roll. The pilot is seated so that her head B is located at r 5 2i 1 1j ft with respect to the center of the cab A. The cab is rotating about the planetary axis with an angular velocity of 20 rpm counterclockwise as seen from above and this is increasing by 1 rad/s2. Knowing that the cab rolls with a constant angular velocity of 24i rad/s, determine (a) the velocity of the pilot’s head, (b) the angular acceleration of the cab, (c) the acceleration of the pilot’s head. Y 90 mm C E 135 mm D 15.222 and 15.223 The rectangular plate shown rotates at the constant rate v2 5 12 rad/s with respect to arm AE, which itself rotates at the constant rate v1 5 9 rad/s about the Z axis. For the position shown, determine the velocity and acceleration of the point of the plate indicated. 15.222 Corner B 15.223 Corner C B Z A ω1 ω2 X 135 mm Fig. P15.222 and P15.223 1091 586 CHAPTER 20 T H R E E -D I M E N S I O N A L K I N E M AT I C S RIGID BODY OF A PROBLEMS 20–37. Solve Example 20.5 such that the x, y, z axes move with curvilinear translation, ! = 0 in which case the collar appears to have both an angular velocity ! xyz = V1 + V2 and radial motion. 20–38. Solve Example 20.5 by fixing x, y, z axes to rod BD so that ! = V1 + V2. In this case the collar appears only to move radially outward along BD; hence ! xyz = 0. 20–39. At the instant u = 60!, the telescopic boom AB of the construction lift is rotating with a constant angular velocity about the z axis of v1 = 0.5 rad>s and about the pin at A with a constant angular speed of v2 = 0.25 rad>s. Simultaneously, the boom is extending with a velocity of 1.5 ft>s, and it has an acceleration of 0.5 ft>s2, both measured relative to the construction lift. Determine the velocity and acceleration of point B located at the end of the boom at this instant. *20–40. At the instant u = 60!, the construction lift is rotating about the z axis with an angular velocity of v1 = 0.5 rad>s and an angular acceleration of # v1 = 0.25 rad>s2 while the telescopic boom AB rotates about the pin at A with an angular velocity of v2 = 0.25 rad>s # and angular acceleration of v2 = 0.1 rad>s2. Simultaneously, the boom is extending with a velocity of 1.5 ft>s, and it has an acceleration of 0.5 ft>s2, both measured relative to the frame. Determine the velocity and acceleration of point B located at the end of the boom at this instant. z v1 ! 4 rad/s v" 1 ! 3 rad/s2 A 1.5 m 3 m/s 2 m/s2 D B 0.6 m C x v2 ! 5 rad/s v" 2 ! 7 rad/s2 y Prob. 20–41 20–42. At the instant u = 30!, the frame of the crane and the boom AB rotate with a constant angular velocity of v1 = 1.5 rad>s and v2 = 0.5 rad>s, respectively. Determine the velocity and acceleration of point B at this instant. 20–43. At the instant u = 30!, the frame of the crane is rotating with an angular velocity of v1 = 1.5 rad>s and # angular acceleration of v1 = 0.5 rad>s2, while the boom AB rotates with an angular velocity of v2 = 0.5 rad>s and # angular acceleration of v2 = 0.25 rad>s2. Determine the velocity and acceleration of point B at this instant. z B 20 20–41. At the instant shown, the arm AB is rotating about the fixed pin A with an angular velocity v1 = 4 rad>s and angular # acceleration v 1 = 3 rad>s2. At this same instant, rod BD is rotating relative to rod AB with an angular velocity v2 = 5 rad>s, # which is increasing at v 2 = 7 rad>s2. Also, the collar C is moving along rod BD with a velocity of 3 m>s and an acceleration of 2 m>s2, both measured relative to the rod. Determine the velocity and acceleration of the collar at this instant. v1, v1 z 15 ft V1, V1 1.5 m 12 m B u v2, v2 x 2 ft A O C Probs. 20–39/40 y O A u V2, V2 Probs. 20–42/43 y 20.4 *20–44. At the instant shown, the rod AB is rotating about the z axis with an angular velocity v1 = 4 rad>s and an angular acceleration v# 1 = 3 rad>s2. At this same instant, the circular rod has an angular motion relative to the rod as shown. If the collar C is moving down around the circular rod with a speed of 3 in.>s, which is increasing at 8 in.>s2, both measured relative to the rod, determine the collar’s velocity and acceleration at this instant. 20–46. At the instant shown, the industrial manipulator is rotating about the z axis at v1 = 5 rad>s, and about joint B at v2 = 2 rad>s. Determine the velocity and acceleration of the grip A at this instant, when f = 30°, u = 45°, and r = 1.6 m. 20–47. At the instant shown, the industrial manipulator is # rotating about the z axis at v1 = 5 rad>s, and v1 = 2 rad>s2; # and about joint B at v2 = 2 rad>s and v2 = 3 rad>s2. Determine the velocity and acceleration of the grip A at this instant, when f = 30°, u = 45°, and r = 1.6 m. z z v1 ! 4 rad/s v" 1 ! 3 rad/s2 v2 B A f B 1.2 m 5 in. v1 u x y v2 ! 2 rad/s v" 2 ! 8 rad/s2 x 587 RELATIVE-MOTION ANALYSIS USING TRANSLATING AND ROTATING AXES A r 4 in. C y Prob. 20–44 Probs. 20–46/47 20–45. The particle P slides around the circular hoop with # a constant angular velocity of u = 6 rad>s, while the hoop rotates about the x axis at a constant rate of v = 4 rad>s. If at the instant shown the hoop is in the x–y plane and the angle u = 45°, determine the velocity and acceleration of the particle at this instant. *20–48. At the given instant, the rod is turning about the z axis with a constant angular velocity v1 = 3 rad>s. At this same instant, the disk is spinning at v2 = 6 rad>s when v# 2 = 4 rad>s2, both measured relative to the rod. Determine the velocity and acceleration of point P on the disk at this instant. z 20 z v1 ! 3 rad/s x 200 mm O u O 2m P y 0.5 m 1.5 m P x V ! 4 rad/s Prob. 20–45 v2 ! 6 rad/s " ! 4 rad/s2 v 2 0.5 m y Prob. 20–48 15.224 Rod AB is welded to the 0.3-m-radius plate that rotates at the constant rate v1 5 6 rad/s. Knowing that collar D moves toward end B of the rod at a constant speed u 5 1.3 m/s, determine, for the position shown, (a) the velocity of D, (b) the acceleration of D. Y 0.2 m u B D A 0.3 m Z C 0.25 m ω1 X 15.225 The bent rod shown rotates at the constant rate of v1 5 5 rad/s and collar C moves toward point B at a constant relative speed of u 5 39 in./s. Knowing that collar C is halfway between points B and D at the instant shown, determine its velocity and acceleration. Y B 14.4 in. Fig. P15.224 u C A 6 in. E X 20.8 in. ω1 D Z Fig. P15.225 15.226 The bent pipe shown rotates at the constant rate v1 5 10 rad/s. Knowing that a ball bearing D moves in portion BC of the pipe toward end C at a constant relative speed u 5 2 ft/s, determine at the instant shown (a) the velocity of D, (b) the acceleration of D. Y 8 in. u B C D 6 in. ω1 12 in. A Z Fig. P15.226 1092 X 588 CHAPTER 20 T H R E E -D I M E N S I O N A L K I N E M AT I C S 20–49. At the instant shown, the backhoe is traveling forward at a constant speed vO = 2 ft>s, and the boom ABC is rotating about the z axis with an angular velocity # v1 = 0.8 rad>s and an angular acceleration v1 = 1.30 rad>s2. At this same instant the boom is rotating with v2 = 3 rad>s # when v2 = 2 rad>s2, both measured relative to the frame. Determine the velocity and acceleration of point P on the bucket at this instant. OF A RIGID BODY *20–52. The crane is rotating about the z axis with a constant rate v1 = 0.25 rad>s, while the boom OA is rotating downward with a constant rate v2 = 0.4 rad>s. Compute the velocity and acceleration of point A located at the top of the boom at the instant shown. 20–53. Solve Prob. 20–52 if the angular motions are # # increasing at v1 = 0.4 rad>s2 and v2 = 0.8 rad>s2 at the instant shown. z B u A v1 " 0.25 rad/s vO ! 2 ft/s O A 2 ft y C 4 ft P z v1 ! 0.8 rad/s v1 ! 1.30 rad/s2 v2 ! 3 rad/s v2 ! 2 rad/s2 40 ft 15 ft 5 ft v2 " 0.4 rad/s 3 ft x 30! O x Prob. 20–49 y 20–50. At the instant shown, the arm OA of the conveyor belt is rotating about the z axis with a constant angular velocity v1 = 6 rad>s, while at the same instant the arm is rotating upward at a constant rate v2 = 4 rad>s. If the # conveyor is running at a constant rate r = 5 ft>s, determine the velocity and acceleration of the package P at the instant shown. Neglect the size of the package. 20 20–51. At the instant shown, the arm OA of the conveyor belt is rotating about the z axis with a constant angular velocity v1 = 6 rad>s, while at the same instant the arm is rotating upward at a constant rate v2 = 4 rad>s. If the conveyor is # $ running at a rate r = 5 ft>s, which is increasing at r = 8 ft>s2, determine the velocity and acceleration of the package P at the instant shown. Neglect the size of the package. Probs. 20–52/53 20–54. At the instant shown, the arm AB is rotating about the fixed bearing with an angular velocity v1 = 2 rad>s and # angular acceleration v1 = 6 rad>s2. At the same instant, rod BD is rotating relative to rod AB at v2 = 7 rad>s, which is # increasing at v2 = 1 rad>s2. Also, the collar C is moving # along rod BD with a velocity r = 2 ft>s and a deceleration $ 2 r = - 0.5 ft>s , both measured relative to the rod. Determine the velocity and acceleration of the collar at this instant. z v2 ! 7 rad/s v2 ! 1 rad/s2 A z P V1 ! 6 rad/s O x r ! 1 ft B C u ! 30" r ! 6 ft u ! 45" V2 ! 4 rad/s Probs. 20–50/51 1.5 ft v1 ! 2 rad/s v1 ! 6 rad/s2 x y 2 ft A y Prob. 20–54 D