Preface
Read This First
About This Manual
This Design for Testability Reference Guide provides information on
developing test strategies for ASIC designs.
The following list summarizes the chapters of this ASIC document.
How to Use This Manual
The chapter highlights are presented in the following text.
Chapter 1
Introduction to Design for Testability
Introduces the subjects of designing for testability in the beginning of the
design process, fault simulation, and dc parametric testing
Chapter 2
Reasons for Using Design for Testability
Discusses the time and money savings achieved by using and integrating
design for testability (DFT) early in your design process. Discusses fault
grading and fault coverage.
Chapter 3
Developing a Testability Strategy
Presents strategies for developing testability techniques
Chapter 4
Test Pattern Requirements
Presents the required and optional TDL pattern types
Chapter 5
Ad Hoc Testability Practices
Recommends some work-arounds and techniques that are useful for
improving your testability
iii
How to Use This Manual
Chapter 6
Structured Testability Practices
Discusses the different types of scan design testing
Chapter 7
IEEE Standard 1149.1-1990
Provides an overview of the IEEE Std 1149.1 and gives an overview of the
boundary-scan architecture
Chapter 8
Generic Test Access Port
Discusses the generic test access port (GTAP), which is used to enable and
disable various DFT features
Chapter 9
Parallel Module Test
Presents information on parallel module test (PMT), how to use PMT with
MegaModules, such as how to test buses and hook up test buses to device pins
Chapter 10
Parametric Measurements
Discusses using parametric testing to guarantee conformance to electrical
data sheets and presents information on the use of boundary-scan, pattern
sets, and TDL types
Chapter 11
Automatic Test Pattern Generation
Presents automatic test pattern generation (ATPG) methodologies, such as
path sensitization and full and partial scan
Chapter 12
Test Pattern Generation
Discusses generating test patterns for use by automated test equipment (ATE)
Chapter 13
IEEE Standard 1149.1-Based dc Parametric Testing
Discusses what is required in performing IEEE Standard 1149.1-based dc
parametric testing
Chapter 14
Military ASIC
Summarizes military ASIC documents and the location of military-specific
design information
Appendix A
Glossary
Contains important ASIC words, phrases, and software tools
iv
Design for Testability
Notational Conventions
Notational Conventions
This document uses the following conventions.
❏
Program listings, program examples, and interactive displays are shown
in a special typeface (called courier) similar to a typewriter’s.
Examples use a bold version of the special typeface for emphasis;
interactive displays use a bold version of the special typeface to
distinguish commands that you enter from items that the system displays
(such as prompts, command output, error messages, etc.).
Here is a sample program listing:
0011
0012
0013
0014
0005
0005
0005
0006
0001
0003
0006
.field
.field
.field
.even
1, 2
3, 4
6, 3
Here is an example of a system prompt and a command that you might
enter:
C:
❏
csr -a /user/ti/simuboard/utilities
In syntax descriptions, the instruction, command, or directive is in a bold
typeface font and parameters are in an italic typeface. Portions of a
syntax that are in bold should be entered as shown; portions of a syntax
that are in italics describe the type of information that should be entered.
Here is an example of a directive syntax:
.asect
section name, address
.asect is the directive. This directive has two parameters, indicated by
section name and address. When you use .asect, the first parameter
must be an actual section name; the second parameter must be an
address.
❏
Square brackets ( [ and ] ) identify an optional parameter. If you use an
optional parameter, you specify the information within the brackets; you
do not enter the brackets themselves. Here’s an example of an instruction
that has an optional parameter:
LALK
16-bit constant [, shift]
The LALK instruction has two parameters. The first parameter, 16-bit
constant, is required. The second parameter, shift, is optional. As this
syntax shows, if you use the optional second parameter, you must
precede it with a comma.
v
Information About Cautions and Warnings
❏
Braces ( { and } ) indicate a list. The symbol | (read as or ) separates items
within the list. Here’s an example of a list:
{ * | *+ | *- }
This provides three choices: *, *+, or *-.
Unless the list is enclosed in square brackets, you must choose one item
from the list.
❏
Some directives can have a varying number of parameters. For example,
the .byte directive can have up to 100 parameters. The syntax for this
directive is:
.byte value1 [, ... , valuen]
This syntax shows that .byte must have at least one value parameter, but
you have the option of supplying additional value parameters, separated
by commas.
Information About Cautions and Warnings
This book may contain cautions and warnings.
This is an example of a caution statement.
A caution statement describes a situation that could potentially damage your software or equipment.
This is an example of a warning statement.
A warning statement describes a situation that could potentially
cause harm to you.
The information in a caution or a warning is provided for your protection.
Please read each caution and warning carefully.
vi
Design for Testability
Related Documentation From Texas Instruments
Related Documentation From Texas Instruments
The following list describes related documents of interest to the Submicron
ASIC Products Design for Testability Reference Guide (DFT) and includes
corresponding literature numbers.
The ASIC TDL 91 Reference, which discusses ASIC TDL 91 version 5.0. The
TI Web-based ASIC TDL 91 Reference provides details about a particular tool’s capabilities. For more information on the Web, contact your TI
Customer Design Center representative.
The ASIC TDL 91 and Scan Designs Reference, which provides informative
application examples on ASIC TDL 91 and scan designs. Refer to the TI
web-based ASIC TDL 91 and Scan Designs Reference.
The Submicron ASIC Products Design for Testability Application Reports, which provide information on designing with a generic test access
port (GTAP) (refer to the Web-based Generic Test Access Port Application Report), on the RAM Built-In Self-Test (refer to the Web-based RAM
Built-In Self-Test (BIST) Application Report), and on the multiplexed parallel module test (refer to the Web-based Multiplexed Parallel Module
Test Application Report).
The Submicron ASIC Products Design Software Manual (DSM): TIDSS
Design Flow, which describes the Texas Instruments (TI) Design Support Software (TIDSS), Release 5 series design flow. The Web-based
TIDSS Tools Reference gives details about the specific capabilities and
features of each TIDSS tool.
The Web-based TIDSS Tools Reference, which covers the TIDSS tools in
depth and supports releases in the TIDSS series. This manual (TIDSS
Design Flow) will often refer you to the TI Web-based TIDSS Tools
Reference for details about a particular tool’s capabilities. For more
information on the Web, contact your TI Customer Design Center
representative.
The Cadence Design Planner User’s Guide, which explains how to use
the Cadence Design Planner floorplanner in the TI Flow.
The Submicron ASIC Products Test Synthesis User’s Guide (literature
number SRGU002B), which describes the Synopsys Test Compiler,
a test tool combining design-for-testability synthesis with automatic test
pattern generation.
The TGC6000/TEC6000 Web-based Design Rules describes design rules
in the flow and provide up-to-date information enabling effective use of
tool-specific design rules and the resolution of errors and warnings
encountered during the design process.
vii
Related Documentation From Texas Instruments
Submicron ASIC Products Design Software Manual: TIDSS 5.0 Design
Flow (literature number SRGU009) takes you through all the design
steps needed to hand off a complete and verified design database to
Texas Instruments.
Submicron ASIC Products Design Software Manual: TIDSS Tools
addresses the specifics of each TI software tool that you use in designing
your submicron application-specific integrated circuit (ASIC). Available
on the Web. Contact your TI Customer Design Center.
Submicron ASIC Products Design for Testability Reference Guide
(literature number SRUU002F) offers guidelines for developing a coherent approach to integrating testability in the design flow.
TGC6000/TEC6000 0.18-µm CMOS Arrays Macro Library Summary
(literature number SRGD005) provides accurate electrical and timing
specifications for each macro included in the TI TGC6000/TEC6000 family software logic library.
TGC6000/TEC6000 Series 0.18-µm CMOS Gate Arrays Family Data Sheet
(literature number SRGS025A) summarizes electrical, timing, and packaging information for the macros included in the TI TGC6000/TEC60000
Series software logic library, release 1.0.
TGC6000/TEC6000 Series 0.18-µm CMOS Gate Arrays Library Release
1.0 Release Notes (literature number SRGA027) describes the
TGC6000/TEC6000 library release 1.0 for HP and Sun platforms. The
library can be distributed on tape, either separately or in conjunction with
other library releases and/or releases of Texas Instruments Design Support Software (TIDSS) release 5.0.
Submicron ASIC Products TIDSS Release 5.0 Release Notes (literature
number SRUA021) describes the Texas Instruments Design Support
Software (TIDSS) release 5.0.
Submicron ASIC Products Design Kit Installation Notes (literature number
SRUU018) contains detailed instructions for installing the TGC6000/
TEC6000 library (and TIDSS, if applicable).
Submicron ASIC Products Cadence Design Planner User’s Guide (literature number SRSU009) describes the various aspects of the Design
Planner floorplanning tool.
viii
Design for Testability
If You Need Assistance
If You Need Assistance
If you need assistance or to access information on the Internet/Intranet,
contact your local TI Customer Design Center representative.
Trademarks
Advantest is a trademark of Advantest Corporation.
ACE, DETECTOR, GOOD, MegaModule, and TI are trademarks of Texas
Instruments Incorporated
Analyzer, Cadence, Design Planner, Gate Ensemble, LeapFrog, QPlace,
SDF, Verilog, Verilog HDL, and Verilog-XL, are trademarks of Cadence
Design Systems, Inc.
DFTAdvisor, FlexTest, FastScan, Mentor Graphics, and QuickSim II are
trademarks of Mentor Graphics Corporation
Behavioral Compiler, DC Expert, DC Professional, DesignPower, dont_touch,
Power Compiler, Primetime, Synopsys, Synopsys VHDL Compiler, Test
Compiler, Test Compiler Plus, VSS, VSS Expert, and VSS Professional are
trademarks of Synopsys, Inc.
Gemini, IKOS, NSIM, Voyager, and Voyager-FS are trademarks of IKOS
Systems, Inc.
HP, HP 700, HP 9000, and HP-UX are trademarks of Hewlett-Packard
Company
IBM is a trademark of International Business Machines Corporation
SPARC, SPARC 20, SPARCstations, and UltraSPARC are trademarks of
SPARC International, Inc., but licensed exclusively to Sun Microsystems, Inc.
Solaris, Sun Sun-5, SunOS, and Sun Workstation are trademarks of Sun
Microsystems, Inc.
Quad Design, and Sunrise are trademarks of Viewlogic Systems,
Incorporated, a subsidiary of Synopsys, Inc.
Vitesse is a trademark of Vitesse Semiconductor Corporation
EMIS is a trademark of Synercom Technology, Inc.
ix
Trademarks
ICRAMBIST and LogicVision are trademarks of LV Software, Inc.
Kevlar and Teflon are trademarks of E.I. DuPont de Nemours & Company
MQUAD is a trademark of OIin Corporation
Super-Compact is a trademark of Compact Software, Inc.
Design VERIFYer is a trademark of Chrysalis Symbolic Design, Inc.
Epilog is a trademark of Nextwave Design Automation, Inc.
System Realizer is a trademark of Quickturn Design Systems, Inc.
x
Design for Testability
Contents
1
Introduction to Design for Testability
1-1
2
Reasons for Using Design for Testability
-1
The Need for Testability ...................................................................................................-2
Test-Time Cost ................................................................................................................-2
Time-to-Market ................................................................................................................-3
Fault Coverage and Cost of Ownership...........................................................................-5
3
Developing a Testability Strategy
3-1
Selecting a Technology..................................................................................................3-2
Committing to Testability Design Practices....................................................................3-3
Establishing a Fault-Grade Requirement.......................................................................3-4
Will IEEE Standard 1149.1 Be a System Requirement? ...............................................3-5
Selecting a Testability Approach Based on Gate Density..............................................3-6
Choosing Structured Tools ............................................................................................3-7
Establishing a Diagnostic Pattern Set to Expedite Debug .............................................3-9
Generating High-Fault-Grade Test Patterns ................................................................3-10
Simulating Test Patterns and Timing ...........................................................................3-11
Converting Test Patterns to TDL .................................................................................3-12
Planning for Test Pattern/Logic Revision Compatibility ...............................................3-13
4
Test Pattern Requirements
4-1
Responsibilities..............................................................................................................4-2
TDL Type Descriptions ..................................................................................................4-3
5
Ad Hoc Testability Practices
5-1
Logic Design With Testability in Mind ............................................................................5-2
Improving Testability Via Unused Pins ..........................................................................5-3
Using Bidirectional Pins.................................................................................................5-4
Initializing the Circuit to a Known State .........................................................................5-5
xi
Contents
Avoiding Asynchronous Circuitry ...................................................................................5-7
Avoiding Gated Clocks ..................................................................................................5-8
Allowing Internal Clocks to Be Bypassed From Circuit’s Inputs.....................................5-9
Allowing Counters and Dividers to Be Bypassed ........................................................5-10
Splitting Long Counter Paths .......................................................................................5-11
Multiplexing to Provide Direct Access to Logic ............................................................5-12
Breaking Feedback Paths in Nested Sequential Circuits.............................................5-14
Allowing Redundant Circuitry to Be Tested .................................................................5-15
Watching for Signals That Reconverge .......................................................................5-16
Decoupling Linked Logic Blocks ..................................................................................5-17
Johnson Counter Test Signal Generator .....................................................................5-18
Shift Register Test Signal Generator ...........................................................................5-19
Shift Register Used to Obtain Observability ................................................................5-20
6
Structured Testability Practices
6-1
Structured Approaches to Designing for Testability.......................................................6-2
Clocked Scan Flip-Flop Design .....................................................................................6-3
Multiplexed Flip-Flop Scan Design ................................................................................6-5
Clock Skew and Edge-Triggered Flip-Flop Scan ...........................................................6-7
Clocked LSSD Scan Flip-Flop Design ...........................................................................6-8
Guidelines for Flip-Flop Scan Design ..........................................................................6-10
Scan Path Loading on Critical ac Path ........................................................................6-11
Bus Contention and Scan Testing ...............................................................................6-12
Test-Isolation Modules.................................................................................................6-14
Where Scan Is Not Efficient.........................................................................................6-20
7
IEEE Standard 1149.1-1990
7-1
Overview........................................................................................................................7-2
Boundary-Scan Architecture .........................................................................................7-3
8
Generic Test Access Port
8-1
Overview........................................................................................................................8-2
Test Register..................................................................................................................8-3
Test Register—Bit Definitions .......................................................................................8-5
Controller .......................................................................................................................8-7
Communication Protocol ...............................................................................................8-8
9
Parallel Module Test
9-1
Contents
xii
Contents
Parallel Module Test of MegaModules...........................................................................9-2
MegaModule Test Collar................................................................................................9-4
Single MegaModule PMT I/O Hookup ...........................................................................9-5
PMT Test Bus ................................................................................................................9-6
Multiple MegaModule PMT I/O Hookup.........................................................................9-7
PMT for Analog MegaModules ......................................................................................9-9
In-System Use .............................................................................................................9-21
10
Parametric Measurements
10-1
Overview......................................................................................................................10-2
Input Threshold Voltage Levels Using a Clocked NAND Tree (VIH_VIL TDL Type) ....10-4
Output Voltage Levels (DC_PARA TDL Type) ...........................................................10-10
Three-State High-Impedance Measurements (DC_PARA TDL Type) .......................10-11
Input Current Measurements (DC_PARA TDL Type) ................................................10-12
Quiescent Drain Supply Current (IDDQ TDL Type) ...................................................10-13
11
Automatic Test Pattern Generation
11-1
Introduction to Automatic Test Pattern Generation ......................................................11-2
Path Sensitization ........................................................................................................11-5
Full-Scan Designs .......................................................................................................11-6
Partial-Scan Designs ...................................................................................................11-7
Testing and Debugging Considerations .......................................................................11-8
Common ATPG Constraints ........................................................................................11-9
Summary ...................................................................................................................11-10
12
Test Pattern Generation
12-1
Introduction to Testing .................................................................................................12-2
Test Pattern Creation...................................................................................................12-6
TDL Overview............................................................................................................12-13
13
IEEE Standard 1149.1-Based dc Parametric Testing
13-1
Introduction..................................................................................................................13-2
Boundary-Scan Architecture .......................................................................................13-3
Parametric Measurements Using Boundary-Scan Architecture ................................13-10
Integrating Boundary-Scan Architecture and GTAP ..................................................13-18
14
Military ASIC
14-1
Military-Specific Design Information ............................................................................14-2
Military ASIC Topics Cross-Reference ........................................................................14-3
Contents
xiii
Contents
Glossary
Index
xiv
Design for Testability
1
Index-1
Figures
2–1
2–2
2–3
2–4
2–5
2–6
3–1
5–1
5–2
5–3
5–4
5–5
5–6
5–7
5–8
5–9
5–10
5–11
5–12
5–13
5–14
5–15
5–16
5–17
5–18
5–19
5–20
5–21
Fault Grade Versus Development Time ............................................................................-3
Economic Trade-Off for a Testable Design .......................................................................-4
Defect Level Versus Fault Coverage .................................................................................-6
Motorola/Delco Study Results ...........................................................................................-7
ASIC ppm Versus PCB ppm Rate .....................................................................................-8
Cost of Ownership .............................................................................................................-9
Testability Development Flow........................................................................................3-14
Observing an Internal Node.............................................................................................5-3
Test Signal Injection ........................................................................................................5-3
Bidirectional Pins Giving Access to Internal Nodes .........................................................5-4
Uncontrollable State Machine..........................................................................................5-5
Using Clear to Add Controllability ....................................................................................5-6
Add Clock to Asynchronous Latch...................................................................................5-7
Gated Clock and Alternative ............................................................................................5-8
Bypass Internal Clock Generators ...................................................................................5-9
Bypass Counters and Dividers ......................................................................................5-10
Long Counter Path Divided for Testing..........................................................................5-11
Multiplexing an Output Pin to Improve Observability .....................................................5-12
Multiplexing an Input Pin to Improve Controllability .......................................................5-12
Multiplexing Both Inputs and Outputs to Improve Testability.........................................5-13
Example of Unobservable Flip-Flop Outputs .................................................................5-13
Flip-Flop Outputs Made Observable With a Multiplexer ................................................5-13
Nesting of Sequential Circuits........................................................................................5-14
Redundant Circuitry .......................................................................................................5-15
Reconverging Signals....................................................................................................5-16
Decouple Circuit Blocks.................................................................................................5-17
Johnson Counter to Minimize Test Pins ........................................................................5-18
Test Signal Generator Using a Shift Register................................................................5-19
xv
Figures
5–22
6–1
6–2
6–3
6–4
6–5
6–6
6–7
6–8
6–9
6–10
6–11
6–12
6–13
6–14
6–15
7–1
7–2
7–3
8–1
8–2
8–3
8–4
9–1
9–2
9–3
9–4
9–5
9–6
9–7
9–8
9–9
9–10
9–11
9–12
9–13
10–1
Shift Register Adding Observability to Buried Nodes ....................................................5-20
Clocked Scan Flip-Flop....................................................................................................6-3
Clocked Scan Flip-Flop Circuit Interconnect....................................................................6-4
Multiplexed Scan Flip-Flop ..............................................................................................6-5
Multiplexed Flip-Flop Scan Path ......................................................................................6-5
Clocked LSSD Scan Flip-Flop ........................................................................................6-8
Clocked LSSD Scan Flip-Flop Circuit Interconnect ........................................................6-9
Isolate Scan Path Loading.............................................................................................6-11
Bus Contention Hazard..................................................................................................6-12
Scan 3-State Disabling Logic.........................................................................................6-13
Partition Into Test-Isolation Blocks ................................................................................6-14
Multiple Clocked Scan Flip-Flop Scan Paths.................................................................6-16
Multiple Multiplexed Flip-Flop Scan Paths.....................................................................6-17
Multiple Clocked LSSD Scan Paths...............................................................................6-18
Scan Vectors for Multiple Scan Blocks ..........................................................................6-19
Scan Path Around a Function........................................................................................6-20
Boundary-Scan Architecture............................................................................................7-4
General-Purpose Boundary-Scan Macro.........................................................................7-6
Boundary-Scannable PCB...............................................................................................7-7
GTAP Block Diagram.......................................................................................................8-2
TP000 (Test Register Building Block)..............................................................................8-3
Typical Test-Register Architecture...................................................................................8-4
GTAP-Controller State Transition Diagram .....................................................................8-9
GTAP-Controlled PMT Block Diagram ............................................................................9-3
MegaModule With a Test Collar ......................................................................................9-4
Single MegaModule PMT ................................................................................................9-5
PMT Test Bus Hookup.....................................................................................................9-8
PMT for a Single Analog-to-Digital Converter................................................................9-10
PMT for a Single Video Band Analog-to-Digital Converter ............................................9-11
PMT for Multiple Analog-to-Digital Converters ..............................................................9-13
PMT for Multiple Video Band Analog-to-Digital Converters...........................................9-14
PMT for a Single Video Band Digital-to-Analog Converter ............................................9-16
PMT for Multiple Digital-to-Analog Converters ..............................................................9-17
PMT for Multiple Video Band Digital-to-Analog Converters...........................................9-18
PMT for a Single Differential Amplifier...........................................................................9-19
PMT for Multiple Differential Amplifiers..........................................................................9-20
Clocked NAND Tree Circuit (Dedicated Control Pins)...................................................10-5
Contents
xvi
Figures
10–2
10–3
11–1
11–2
12–1
12–2
12–3
12–4
12–5
12–6
12–7
12–8
12–9
12–10
13–1
13–2
13–3
13–4
13–5
13–6
13–7
13–8
13–9
13–10
CMOS ASIC NAND Tree Configurations.......................................................................10-7
Clocked NAND Tree Circuit (Shared Control Pins) .......................................................10-8
Typical Design Flow.......................................................................................................11-3
Typical ATPG Flow ........................................................................................................11-4
Synchronous Pattern for Use During Functional Test ...................................................12-3
ATE Block Diagram .......................................................................................................12-4
Tester Period Slip ..........................................................................................................12-5
Input Delay Groups........................................................................................................12-7
Definition of TDL Clocks ................................................................................................12-8
Minimum Clock Width ....................................................................................................12-9
TDL Output Strobe Placement.....................................................................................12-10
Simulation Tester Loads ..............................................................................................12-11
Waveform Representation of the Sample TDL ............................................................12-15
Relationship Between Test Vectors and Corresponding Logic Waveforms ................12-17
IEEE Standard 1149.1 Hardware Block Diagram ..........................................................13-3
A Simplified View of the Boundary-Scan Register.........................................................13-4
Boundary-Scan Cell.......................................................................................................13-5
TAP Controller State Diagram .......................................................................................13-7
Boundary-Scan Registers and GTAP Test Register Hardware ...................................13-19
GTAP Test Register Architecture ................................................................................13-20
Test Register Load Timing Diagram ............................................................................13-21
TCK-to-Master/Slave Clock Interface Circuit ...............................................................13-21
TDO Input Circuit for Test Activation ...........................................................................13-22
Example TST_ENBL Circuit ........................................................................................13-22
Contents
xvii
Tables
Table
4–1
8–1
8–2
10–1
10–2
10–3
12–1
13–1
14–1
Page
TDL Pattern Set Requirements Summary ................................................................. 4-5
Example Test-Register TP000 Assignments ............................................................. 8-5
Example Test-Register Test-Selection Codes............................................................ 8-6
Toggle States ........................................................................................................... 10-3
VIL/VIH Test Patterns (Dedicated Control Pins) ...................................................... 10-6
VIH_VIL Test Patterns (Shared Control Pins).......................................................... 10-9
Commonly Used TDL Logic State Characters......................................................... 12-15
Parametric Test Resources ................................................................................... 13-10
Military ASIC Topics Cross-Reference ................................................................... 14-4
xviii
Chapter 1
Introduction to Design for Testability
Testability is the concern most often voiced by Texas Instruments (TI)
application specific integrated circuit (ASIC) users. This document is intended
to consolidate TI policies into a coherent approach to designing for testability.
It is not intended as a specification, but as a guide you can use for developing
test strategies when designs are being initiated.
Adoption of design-for-testability principles early in the design process
ensures the maximum testability for the minimum effort. These guidelines
emphasize that test is a part of the design flow, not a process that is
performed at the end of the design cycle.
Designing testability into any circuit affects the hardware to some degree.
Additional logic usually must be added. This additional logic increases the
amount of silicon required to implement the design. The savings from
enhanced testability do not typically show up until the cycle time and cost of
testing a circuit and its end system are analyzed.
Fault simulation is an important part of designing for testability. This technique
enables you to evaluate your test patterns to determine whether these
patterns can detect faults. Faults can occur during either the design tooling
stage or the circuit fabrication stage. A fault simulator uses fault models, such
as a node shorted to power (stuck-at-one) or a node shorted to ground (stuckat-zero), and compares the response of a fault-free circuit with the response
of a faulty circuit. If the response of the fault-free circuit is different than the
response of the faulty circuit, the test patterns detect the fault.
1-1
By faulting all the nodes in the circuit, the fault simulator produces the test
pattern fault coverage. The fault coverage is the percentage of faults detected
among the total faults tested. The higher the fault coverage, the better the test
pattern separates a faulty circuit from a fault-free circuit. After determining
which faults have not been detected by the current set of test patterns, you
can generate additional test patterns to detect these faults. The higher the
fault coverage of the pattern set (often called fault grade), the greater the
probability of obtaining only fault-free circuits.
The dc parametric testing ensures that a fault-free circuit conforms to the
electrical data sheet. The pattern set for dc parametric testing should provide
one hundred percent toggle of all I/Os.
The IDDQ (quiescent drain supply current) testing ensures a circuit is free from
defects such as resistive bridging or partial gate punch through. Stuck-at-1 or
stuck-at-0 often cannot detect defects of these types.
1-2
Design for Testability
Chapter 2
Reasons for Using Design for
Testability
This chapter explains how design-for-testability principles ultimately save
money and time when an ASIC design is created and manufactured.
Topic
Page
The Need for Testability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2–2
Test-Time Cost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2–2
Time-to-Market . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2–3
Fault Coverage and Cost of Ownership . . . . . . . . . . . . . . . . . . . . 2–5
2-1
The Need for Testability
2.1
The Need for Testability
Most engineers involved in the design of ASIC devices are familiar with the
trade-offs between gate arrays, standard cells, and full custom devices. They
are also familiar with the vendor selection process. The aspect of test
capability and testability is often overlooked.
In the past, testability could be ignored when typical designs were a few
thousand gates. These designs were implemented first and then turned over
to a test engineer or to a vendor to force a test program for production. As
design complexities increased, this approach to testing became futile. Now,
successful high-density ASIC design and manufacturing demand that circuits
be designed with testability incorporated into the process.
A designer often sees testability as having only a negative impact on
performance and area. Although testability imposes additional constraints in
the design phase, these constraints are unmanageable only if ignored until
the design is completed and testability is handled as a post-design insertion.
In fact, the design constraints are overwhelmingly balanced by improved
testability, which adds value to the device throughout manufacturing and
system life.
2.2
Test-Time Cost
Test cost, as it relates to time, is a simple calculation. Most commercial
testers cost between $2 million and $3 million. Under normal circumstances,
the tester depreciation, plant, operator, and support personnel costs are
between $.10 and $.20 per test second.
Brute-force test approaches often generate a large number of test patterns.
Because test patterns are run at multiple power supply values and possibly
at multiple temperatures, inefficient pattern sets can severely impact the test
costs of a complex ASIC device.
2-2
Design for Testability
Time-to-Market
2.3
Time-to-Market
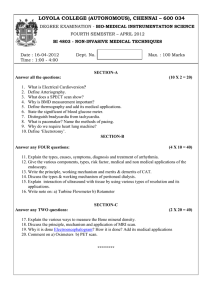
Surveys indicate that 40 percent of the development cycle time for an ASIC
device is required for test insertion and test pattern generation. This figure is
expected to increase as device complexity increases. The intent of a designfor-testability (DFT) strategy is to achieve high-fault-detection test programs
in reduced time (Figure 2–1). The obvious cycle-time reductions result from
designed-in testability (elimination of iterative redesigns resulting from poor
design practices), and from automatic test pattern generation (ATPG).
Figure 2–1.
Fault Grade Versus Development Time
100
With DFT Strategies
Fault Grade %
80
60
Without DFT Strategies
40
20
0
Hours
Days
Weeks
Months
Time to Develop Test Patterns
Figure 2–2 shows the economic relationship between time-to-market and
system manufacturing and field maintenance costs. Point 1 represents the
case where market entry timing forces a constraint on the development time.
Because 40 percent of this time is expended in inserting testability, the
temptation is to rush to market with devices that are not completely testable
or tested. The result is higher than desirable manufacturing and field
maintenance cost. Point 2 represents the case where DFT and ATPG
techniques are employed to develop devices that are completely tested. This
situation allows an economic optimum that is more favorable to long-term
manufacturing and field-maintenance costs.
Reasons for Using Design for Testability
2-3
Time-to-Market
Figure 2–2.
Economic Trade-Off for a Testable Design
}
Without DFT
Strategy
Economic
Optimum
1
Cost $
Economic
Optimum
2
}
With DFT
Strategy
Manufacturing
and Field Cost
Fault Coverage %
Development and
Time-to-Market Cost
Total Cost
A less obvious result of a DFT strategy is the reduction of debug time. You,
as an ASIC designer, must make certain assumptions about system
requirements. Often a new device does not work in the system environment
and requires debugging. If the device is designed for controllability and
observability access, the debugging process is enhanced. Conversely, if
these two features are overlooked, debugging and manufacturing can be
significantly harder to accomplish, if not impossible. Oscilloscopes and
waveform analyzers are not very effective in debugging systems using
complex ASIC devices in a surface-mount environment.
2-4
Design for Testability
Fault Coverage and Cost of Ownership
2.4
Fault Coverage and Cost of Ownership
Figure 2–2 on page 2–4 shows the trade-off between time-to-market and
manufacturing and field-maintenance costs. The horizontal factor on this
figure is fault coverage. The relationship between fault coverage and devicedefect level is well documented.
Figure 2–3 is a plot of the relationship modelled by T.W. Williams1 for fault
coverages of 90 percent or greater.
The model developed by Williams is expressed by the following equation:
D = [1 – Y
(1 – T)
] × 100
where:
D = Defect level in percent
Y = Theoretical functional process yield
T = Fault coverage of the test program used
1. T. W. Williams and N. C. Brown, “Defect Level as a Function of Fault Coverage,” IEEE
Transactions on Computers, C-30(12), December 1981, pp. 987-988.
Reasons for Using Design for Testability
2-5
Fault Coverage and Cost of Ownership
Figure 2–3.
Defect Level Versus Fault Coverage
7
50%
6
Defect Level %
5
60%
4
70%
3
80%
2
90%
1
0
90
91
92
93
94
50% Process YLD —
6.7
6.04 5.39 4.74 4.07
60% Process YLD —
4.98 4.48 4
70% Process YLD —
3.5
80% Process YLD —
90% Process YLD —
95
96
97
98
99
100
3.41 2.73
2.08 1.38
0.89 0
3.51 3.02
2.52 2.02
1.52 1.01
0.51 0
3.16 2.81 2.47 2.12
1.77 1.42
1.06 0.71
0.36 0
2.21 1.99 1.77 1.55 1.33 1.11 0.89
0.67 0.45
0.22 0
1.05 0.94 0.84 0.73 0.63
0.32 0.21 0.11 0
0.53 0.42
Fault Coverage %
To explore the Williams model briefly, assume that the ASIC vendor has a
silicon and assembly process yield that is 70 percent. If the fault grade of the
test program is also 70 percent, the defect level is projected to be 10.1
percent or 101000 ppm (parts per million) (This is outside the limits of the
chart and was calculated.). At a fault grade of 90 percent, the defect level is
projected to be 3.5 percent, or 35000 ppm.
A study of the model shows that the process yield becomes an insignificant
term when the fault coverage of the test program is very close to 100 percent.
Motorola and Delco2 performed a study in 1980 that supports the Williams
model. Their experimental results are shown in Figure 0-4. A fault coverage
of 99.9 percent was required to obtain defect levels in the range of 100 ppm.
2. Harrison, Holzworth, Motz of Delco and Daniels Thomas, Weimann of Motorola, September
1980.
2-6
Design for Testability
Fault Coverage and Cost of Ownership
Figure 2–4.
Motorola/Delco Study Results
100000
Defect Level ppm
10000
1000
100
10
90
99
99.9
Fault Coverage %
Figure 2–5 shows the maximum allowable ASIC defect rate to achieve a goal
PCB (printed circuit board) defect rate as a function of the number of ASIC
devices per board assembly. Note that for multiple-device PCB designs, a
goal of 500 ppm requires ASIC defect levels in the range of 100 to 200 ppm.
Reasons for Using Design for Testability
2-7
Fault Coverage and Cost of Ownership
Figure 2–5.
ASIC ppm Versus PCB ppm Rate
600
Number of ASICs Per Board
1
ASIC ppm Rate
500
400
300
2
200
3
4
5
10
20
100
0
100
0
200
300
400
500
600
Goal PCB ppm Rate
The theoretical and experimental studies conclude that a high-fault-grade test
pattern set is required for low-defect-level ASIC devices. This type of pattern
set is nearly impossible to obtain through manual brute-force means. The
requirements for a high-fault-grade pattern set are:
❏
❏
❏
ATPG tool
Fault grader
A testable design that meets the constraints of the ATPG tool
As stated earlier in this document, a design-for-testability strategy has
performance and area costs. Now the cost of new tools has been added.
Benefits such as lower test costs and reduced time-to-market have been
mentioned. These benefits are real but often hard to quantify. Reduced cost
of ownership is another major benefit and is easy to quantify.
Figure 2–6 shows what is commonly referred to as the cost-of-ownership
order-of-magnitude relationship. It says that each company has a cost
associated with finding a defect in a packaged device before it has entered
the assembly process. This cost can be calculated easily. The cost of finding
a defective device after assembly onto a PCB is an order of magnitude more
than it is before assembly. This continues until the cost to discover a defective
device in a system at a customer’s site is three orders of magnitude greater
2-8
Design for Testability
Fault Coverage and Cost of Ownership
than that of discovery before assembly onto a PCB. The lowest cost of
ownership is to find defective units before they are shipped from the vendor.
Figure 2–6.
Cost of Ownership
Customer Site
Discovery Site
System
PCB
Package
Device
0
1X
10X
100X
1000X
Cost of Defect Discovery Multiplier
The previous discussions have lead to the conclusion that the lowest cost of
ownership can be obtained by providing the ASIC vendor with an efficient
high-fault-detection set of test vectors. These DFT methodologies provide
lower cost of ownership with the added benefit of reducing the time-to-market.
Reasons for Using Design for Testability
2-9
Fault Coverage and Cost of Ownership
2-10
Design for Testability
Chapter 3
Developing a Testability Strategy
You should now be aware of the benefits of having a testable circuit and have
a general awareness of testability techniques. This chapter presents a
methodology for developing a testability strategy for your circuits. The
process involves making decisions based upon your application. The
following strategies, listed by section, step you through the process of
testability.
Topic
Page
Selecting a Technology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3–2
Committing to Testability Design Practices . . . . . . . . . . . . . . . . . 3–3
Establishing a Fault-Grade Requirement . . . . . . . . . . . . . . . . . . . 3–4
Will IEEE Standard 1149.1 Be a System Requirement? . . . . . . . 3–5
Selecting a Testability Approach Based on Gate Density . . . . . . 3–6
Choosing Structured Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3–7
Establishing a Diagnostic Pattern Set to Expedite Debug . . . . . 3–9
Generating High-Fault-Grade Test Patterns . . . . . . . . . . . . . . . . . 3–10
Simulating Test Patterns and Timing . . . . . . . . . . . . . . . . . . . . . . 3–11
Converting Test Patterns to TDL . . . . . . . . . . . . . . . . . . . . . . . . . . 3–12
Planning for Test Pattern/Logic Revision Compatibility . . . . . . . 3–13
3-1
Selecting a Technology
3.1
Selecting a Technology
When selecting a technology or vendor, make sure there is enough
performance and gate-count margin to allow the insertion of testability. Make
an early recognition that you need a 10 percent ac margin and a 10 percent
to 15 percent gate-count margin. An optimized testability library to support
techniques such as parallel module test (PMT), scan, and IEEE Standard
1149.1-1990, IEEE Standard Test Access Port (TAP) and Boundary-Scan
Architecture (JTAG) can reduce the impact of inserting testability features.
Chapter 7, IEEE Standard 1149.1-1990, describes the standard.
Failure to allow for technology margins puts you in a continual state of
compromise. The result can be a circuit with a low purchase price that has a
high cost of ownership through manufacturing because it is untestable.
3-2
Design for Testability
Committing to Testability Design Practices
3.2
Committing to Testability Design Practices
Follow the guidelines listed here to ensure sound testability practices:
❏
Commit to using the testability design practices presented here.
❏
Review the testability design practices with the design team before
beginning the design.
❏
Add a testability commitment to the design requirements documents.
❏
Make testability audits part of the design review process.
Developing a Testability Strategy
3-3
Establishing a Fault-Grade Requirement
3.3
Establishing a Fault-Grade Requirement
The fault-grade requirement can usually be provided by the manufacturing or
quality organization. Establish this requirement before the first design review.
Add the fault-grade requirement to the design requirements document. This
requirement drives many of the decisions that follow in the development of the
test strategy.
Many companies consider the fault-grade requirement to be an index of
device cost of ownership. Failure to achieve it costs profits throughout the
lifetime of the device. Therefore, a waiver of the fault-grade requirement
should be formal and require management approval.
3-4
Design for Testability
Will IEEE Standard 1149.1 Be a System Requirement?
3.4
Will IEEE Standard 1149.1 Be a System Requirement?
When implemented in an ASIC device, IEEE Standard 1149.1 allows
measurement of the interconnect between devices on a PCB through a fourpin bus. If IEEE Standard 1149.1 is selected, the four dedicated test pins can
be used to control test techniques such as parallel module test and scan.
Remember IEEE Standard 1149.1 is not a device test methodology. If there
is a design requirement to simplify PCB testing, you should use all the
resources available in the instruction register to control testing circuits.
Developing a Testability Strategy
3-5
Selecting a Testability Approach Based on Gate Density
3.5
Selecting a Testability Approach Based on Gate Density
The following strategies can be used to select a testability approach based
on gate density.
❏
Designs with fewer than 10K gates
Designs with fewer than 10K gates are not generally complex enough to
require structured test approaches. The overhead impact is usually too
high to justify them. Nonstructured design practices are usually sufficient.
Parallel module test should be used to test embedded memories.
Structured techniques, such as scan, can reduce test program
generation time and allow high fault grades. These benefits make scan
desirable even on low-density designs.
❏
Designs with more than 10K gates but fewer than 20K gates
Structured techniques should be considered for designs in this density
range. Nonstructured design practices are probably sufficient for highly
combinatorial circuits without memory. Structured approaches should be
considered as complexity is increased by the addition of sequential
circuits, feedback, and memory.
Consider scan for reduced cycle times and high fault grades.
❏
❑Designs with more than 20K gates
The complexity of circuits with this density usually requires structured
approaches to achieve high fault grades. At this density, it is often hard to
control or observe deeply embedded circuits. The overhead associated
with structured testability approaches is acceptable at this density.
3-6
Design for Testability
Choosing Structured Tools
3.6
Choosing Structured Tools
Built-in self-test (BIST) or parallel module test (PMT) can be used to test RAM
MegaModules. PMT is the most appropriate method for other MegaModules.
This method provides the best high fault coverage and diagnostic capability.
PMT reduces test time by eliminating the need to propagate test-control
signals and circuit-response signals through complex surrounding logic to
external pins. Design cycle time is also improved with PMT because TI
provides test patterns for MegaModule functions.
Scan is the preferred structured approach for sequential logic. The available
scan choices are:
❏
❏
❏
❏
❏
❏
Clocked scan
Multiplexed flip-flop scan
Level-sensitive scan design (LSSD)
Clocked level-sensitive scan design
Parallel scan paths
Partial scan
The choice between scan approaches is a trade-off between the impact on
area and ac performance. The scan approach chosen should be used
exclusively. Mixing scan approaches in the same device is not recommended.
3.6.1
Clocked Scan
A clocked scan flip-flop has separate clock and data inputs for scan and
system-mode operation. It also has separate data outputs for scan and
system-mode operation. The clock-to-scanout propagation delay is
purposely slowed. This reduces the chance of skew in the scan clock
distribution network that could cause timing race conditions in the scan path.
The separate scanout output isolates the loading of the scan-path routing
from the system mode output.
Clocked scan is a suitable choice for partial scan designs. This scan style
uses a separate clock for scan and system-mode operation. This clock
separation means that nonscan flip-flops are not clocked during the scan
operation.
3.6.2
Multiplexed Flip-Flop Scan
A multiplexed flip-flop scan element consists of a flip-flop with a single clock
and a 2:1 multiplexer at the data input. This scan style relies on minimal clock
Developing a Testability Strategy
3-7
Choosing Structured Tools
skew in the clock distribution network to prevent timing race conditions in the
scan path.
Multiplexed scan is not a good choice for partial scan designs. This scan style
uses a common clock for scan and system-mode operation. This clock
sharing means that nonscan flip-flop clock inputs must be gated to disable
them during the scan operation.
3.6.3
Level-Sensitive Scan Design (LSSD)
Level-sensitive scan design (LSSD) is implemented with a level-sensitive
register latch. Nonoverlapping, two-phase clocks are required. This device
does not contain hazards or race conditions.
The LSSD scan adapts well to partial scan designs.
3.6.4
Clocked Level-Sensitive Scan Design
A clocked LSSD latch has separate clock and data inputs for scan- and
system-mode operation. It also has separate data outputs for scan- and
system-mode operation. The separate scan outputs isolate the system-mode
data output from the scan-mode circuit loads.
Clocked LSSD adapts well to partial scan design.
3.6.5
Parallel Scan Paths
The length of scan paths should be considered because of test time. For
example, a single path of 2000 scan registers requires 2000 tester periods to
load. Four paths of 500 scan registers can be loaded in parallel in 500 tester
periods.
3.6.6
Partial Scan
While scan paths can convert sequential circuits into combinatorial circuits for
testing, this procedure adds overhead and degrades performance. The ATPG
tool may be the driving force in making the scan decision. Partial scan could
be a good decision, if you follow good design practices and have an ATPG
tool that can handle partial scan. In these cases, scan elements could be
omitted from portions of the design that cannot tolerate the performance
impact of scan.
3-8
Design for Testability
Establishing a Diagnostic Pattern Set to Expedite Debug
3.7
Establishing a Diagnostic Pattern Set to Expedite Debug
Establishing a diagnostic functional pattern set is an important step in
decreasing the time-to-market for an ASIC device. The purpose of this
pattern set is to isolate circuitry for analysis. The approach varies among
types of applications. Key architectural blocks to isolate are memory control,
state machines, and bus control. The isolation needs to be sufficient to allow
simulation analysis to determine whether a fault is design, test pattern, or
fabrication-related.
At this point you need to establish whether ac critical path measurements are
required as part of the production testing. The ac critical path pattern sets
should be chosen based on system requirements.
Developing a Testability Strategy
3-9
Generating High-Fault-Grade Test Patterns
3.8
Generating High-Fault-Grade Test Patterns
The fault grade of a test pattern set determines the best possible quality level
attainable with that set of patterns. The development of a high-fault-grade set
of test patterns should come in three stages.
Stage 1:
Develop a set of functional patterns. You should develop these in the
logic-simulation stage of design. Added to these are the diagnostic test
patterns developed for debug analysis. The functional and diagnostic
patterns need to be fault graded. This forms the starting point for
automatic test pattern generation (ATPG).
Stage 2:
Use ATPG for the highest possible fault grade. A high fault grade in a
short cycle time is possible if the development team has followed a
testability strategy and has complied with the following guidelines:
■
■
■
Designed a device with controllability and observability
Selected a quality ATPG tool
Followed guidelines imposed by the ATPG tool
Stage 3:
Generate a dc leakage test. The classic stuck-at fault model is used by
the ATPG tool, but it does not represent some types of CMOS faults. The
dc leakage testing, often referred to as IDDQ testing, is useful in
supplementing stuck-at testing. Implementing IDDQ testing requires a test
mode to turn off all circuits that produce dc current, such as pullup and
pulldown resistors.
3-10
Design for Testability
Simulating Test Patterns and Timing
3.9
Simulating Test Patterns and Timing
Two types of simulation are required during development. Logic simulation
verifies both functionality and performance of the device. Test pattern
simulation produces the information needed to verify the test patterns in a
tester environment. Testers are synchronous systems that require all input
patterns to be changed at fixed points within the test cycle. Normally, with the
exception of primary clocks, input signals can change only near the beginning
of each test cycle. The duration of the test cycle varies from system to system
and determines the upper frequency limit at which a device can be tested.
Typically, however, there are other limitations that establish the testing
frequency.
TI provides a tester constraints table in the test chapter of each productspecific design manual (see Related Documentation From Texas
Instruments, p. viii) that summarizes these limitations. Additional
requirements include the following:
❏
The tester load must be applied to the output.
❏
The tester slew must be applied to the input.
❏
Each TDL pattern set must contain initialization vectors.
❏
Simulations must be run at both the minimum and the maximum
propagation delays in the device macro library.
❏
Inputs and outputs must satisfy the test description language (TDL)
timing restrictions provided by TI.
Developing a Testability Strategy
3-11
Converting Test Patterns to TDL
3.10
Converting Test Patterns to TDL
The testers are programmed using TDL. TDL is a TI-developed test language
used as a source input to program automated test equipment. The TDL
contains a set of test vectors. Test vectors define input signals and expected
output signals. Each test vector defines a test period of fixed duration. The
entire test program defines a set of sequential test periods that perform a
logic verification of the device being tested.
3-12
Design for Testability
Planning for Test Pattern/Logic Revision Compatibility
3.11
Planning for Test Pattern/Logic Revision Compatibility
The most frustrating experience is to debug a problem generated by human
error. Development is a dynamic process. Make provisions in your testability
strategy to ensure that design revisions drive any necessary test program
revisions. Functional equivalent design revisions can affect timing and ATPG
tool pattern sets. The most common cause of test-program-related problems
at ASIC vendors is out-of-date pattern sets.
Developing a Testability Strategy
3-13
Planning for Test Pattern/Logic Revision Compatibility
Figure 3–1.
Testability Development Flow
Pick a technology vendor
Commit to good testability
design practices
Establish a fault-grade
requirement
Yes
IEEE Std 1149.1
required for PCB?
No
Yes
Density = Gates
Gates < 10K
Review IEEE Std 1149.1
No
Yes
10K < Gates < 20K
No
Consider
Scan
Recommend
Scan
Choose structured approach
PMT Scan BIST
Develop diagnostic pattern
sets and locate
critical paths
Develop high-fault-grade
pattern sets
Generate test description
language
Simulate test patterns and timing
Have a system to ensure
test patterns are compatible
with logic revisions
Minimum time-to-market
3-14
Design for Testability
Chapter 4
Test Pattern Requirements
This chapter summarizes the Texas Instruments test pattern requirements.
Topic
Page
Responsibilities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4–2
TDL Type Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4–3
4-1
Responsibilities
4.1
Responsibilities
You have the responsibility to provide a set of required test patterns to TI.
These test patterns are used to perform dc parametric testing, logic
verification, and propagation delay tests. TI accepts additional usergenerated patterns on a limited basis.
The test patterns for handoff to TI must be described in TDL format. TDL
stands for test description language and is the test pattern format accepted
by TI’s internal set of tools. The contents of each TDL set must conform to a
set of test flow constraints. See Test Pattern Generation on page 12–1 for
information on test pattern generation details.
The design’s testability schemes determine which TDL sets are required.
Presently, three testability schemes are supported by TI ASIC:
❏
❏
❏
Scan
TI parallel module test (PMT) for MegaModule testing
Built-in self-test (BIST)
A set of TDL types has been defined by TI ASIC to identify the functions of
each TDL to the set of internal tools. For example, a TDL set written to
facilitate dc parametric and IDDQ tests would be assigned the DC_PARA and
IDDQ TDL types.
4-2
Design for Testability
TDL Type Descriptions
4.2
TDL Type Descriptions
The following subsections present the required and optional TDL types for
scan, BIST, and PMT types. All TDLs are stand alone (meaning they contain
initialization vectors).
4.2.1
Required TDL Pattern Sets
The following three TDL sets are required for each design, regardless of the
testability scheme used:
DC_PARA
TDL used to facilitate dc I/O parametric testing. Each buffer
is toggled to all available input and/or output states. To reduce
test time, a minimum number of vectors is desired.
FUNC
TDL used to verify the logic function
IDDQ
TDL used to facilitate static IDDQ testing
At least one propagation delay measurement is required
per design. The FUNC or DC_PARA TDL can be used to
facilitate a propagation delay test by the insertion of an
ASIC_TEST statement with the PROP keyword into the test
vectors.
4.2.2
TDL Pattern Sets for Scan
Products implementing scan require the following additional TDL sets:
4.2.3
SCAN
TDL used to verify logic integrity. A SCAN TDL set can replace
the requirement for a FUNC TDL set.
SCANCHK
TDL used to check scan path integrity. Each scan path is
checked individually, and a fixed set of states is loaded/
unloaded for each scan register.
TDL Pattern Sets for BIST
Products implementing BIST require the following additional TDL set:
BIST
TDL that executes built-in self-test. If a BIST TDL fails, a
DIAGNOST TDL set may be required to identify the root
cause of the failure.
Test Pattern Requirements
4-3
TDL Type Descriptions
4.2.4
TDL Pattern Sets for PMT
Products that implement PMT have the following additional TDL sets
provided by TI.
4.2.5
ANALOG_<name>
TDL used to verify analog MegaModule functions
PMT
TDL used to verify MegaModule logic functions
PMTSETUP
TDL used to initialize the generic test access port
(GTAP) controller to select a target MegaModule for
test
PMT_SIM
TDL used to validate PMT MegaModule hookup to
the package pins. This TDL is not run on the tester
(ATE).
Optional TDL Pattern Sets
The following are optional TDL sets.
BIST_AC
TDL used to verify timing requirements. If a
BIST_AC TDL fails, a DIAGNOST TDL set may be
required to identify the root cause of the failure.
DIAGNOST
TDL that provides traceability of functional failures
to specific logic blocks. A DIAGNOST TDL set is
applied during nonproduction testing.
FUNC_AC
TDL used to verify timing requirements
GTAPCHK
TDL used to check the GTAP register scan path
integrity
SCAN_AC
TDL used to verify timing requirements. Patterns
are run at LOGIC VERIFICATION frequencies. All
other AT-SPEED constraints apply.
TURNOFF
TDL used to deactivate the CMOS dc current
producers in designs with dc turnoff capability
VIH_VIL
TDL used to facilitate dc input threshold testing.
The inputs are tested one at a time by means of a
NAND tree or IEEE Std 1149.1. TDL is stand
alone. TI will accept a VIH_VIL test waiver instead
of a VIH_VIL pattern set.
TI uses the customer-provided TDL to automatically generate the tester
program. The TDL is first subjected to a quality check to verify that it conforms
4-4
Design for Testability
TDL Type Descriptions
to the constraints of the test operation. Syntax and conformance to tester
constraints are verified by the TI TDL rule checking tool called TDLCHKR.
The TDL timing checks are performed on a simulator.
The PMT TDL sets are added to the QC-verified customer-generated
patterns. The combined pattern sets are then converted to a tester program
by a software package called AUTOGEN.
Table 4–1 summarizes the TDL pattern set requirements. Refer to the test
chapter of the product-specific design manual to see the test pattern rate and
other test constraint data.
Table 4–1. TDL Pattern Set Requirements Summary
Test Constraint Category
Required
Optional
Prop Delay
Option
(see Notes: 1)
DC_PARA
✓
-
✓
✓
-
FUNC
✓
-
✓
✓
-
IDDQ
✓
-
✓
✓
-
BIST
-
✓
✓
✓
-
BIST_AC
-
✓
-
-
✓
DIAGNOST
-
✓
✓
N/A
N/A
FUNC_AC
-
✓
-
-
✓
GTAPCHK
-
✓
✓
✓
-
SCAN
-
✓
✓
✓
-
SCANCHK
-
✓
✓
✓
-
SCAN_AC
-
✓
-
-
✓ (see Note
TDL Type
dc Parametric and
Logic Verification
AtSpeed
Notes: 2)
TURNOFF
-
✓
✓
✓
-
VIH_VIL
-
✓
✓
✓
-
Notes:
1) At least one propagation delay measurement is required per design. The TDL can be used to facilitate a
propagation delay test by the insertion of an ASIC_TEST statement with the PROP keyword into the test vectors.
Propagation delay measurements are not allowed for at-speed TDL types.
2) The maximum scan frequency is the same as for the logic verification constraints. All other at-speed constraints
apply.
Test Pattern Requirements
4-5
TDL Type Descriptions
4-6
Design for Testability
Chapter 5
Ad Hoc Testability Practices
This chapter describes various ad hoc techniques that can be used to make
a design testable.
Topic
Page
Logic Design With Testability in Mind . . . . . . . . . . . . . . . . . . . . . . 5–2
Improving Testability Via Unused Pins . . . . . . . . . . . . . . . . . . . . . 5–3
Using Bidirectional Pins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5–4
Initializing the Circuit to a Known State . . . . . . . . . . . . . . . . . . . . 5–5
Avoiding Asynchronous Circuitry . . . . . . . . . . . . . . . . . . . . . . . . . 5–7
Avoiding Gated Clocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5–8
Allowing Internal Clocks to Be Bypassed From Circuit’s Inputs 5–9
Allowing Counters and Dividers to Be Bypassed . . . . . . . . . . . . 5–10
Splitting Long Counter Paths . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5–11
Multiplexing to Provide Direct Access to Logic . . . . . . . . . . . . . . 5–12
Breaking Feedback Paths in Nested Sequential Circuits . . . . . . 5–14
Allowing Redundant Circuitry to Be Tested . . . . . . . . . . . . . . . . . 5–15
Watching for Signals That Reconverge . . . . . . . . . . . . . . . . . . . . . 5–16
Decoupling Linked Logic Blocks . . . . . . . . . . . . . . . . . . . . . . . . . . 5–17
Johnson Counter Test Signal Generator . . . . . . . . . . . . . . . . . . . 5–18
Shift Register Test Signal Generator . . . . . . . . . . . . . . . . . . . . . . . 5–19
Shift Register Used to Obtain Observability . . . . . . . . . . . . . . . . 5–20
5-1
Logic Design With Testability in Mind
5.1
Logic Design With Testability in Mind
Designing for testability refers to a design approach that enables thorough
testing of a system with minimal effort and maximum coverage. A circuit is
termed testable when the testing effort involved is minimal compared to the
design and manufacturing efforts. The key concepts in design for testability
(DFT) are controllability and observability. The purpose of the various DFT
techniques is to increase the ability to control and observe internal nodes
from external inputs and outputs.
The states of a circuit buried in logic cannot be easily controlled or observed
by external pins. This lack of control makes the generation of test vectors
more time consuming and usually results in excessive numbers of test
vectors being generated. This problem can be addressed by adding special
test pins that increase the controllability or observability of these states. If
extra pins are not available, input combinations that cannot occur during
normal operation of the circuit can be used to place the circuit in the test
mode. On-chip test circuitry can also be used to partition the circuit into
logical subsystems that can be tested in parallel. Testing smaller logical
subsystems simplifies the task of test vector generation. If the logical
subsystems operate in parallel, these test vectors can be merged, resulting
in reduced test time on the tester.
Two basic approaches to testing are prevalent in the industry. The first
approach is categorized as ad hoc and the second as structured. The ad hoc
techniques can be applied to a given product, but require that each circuit be
examined on an individual basis. The structured techniques follow a design
methodology and lend themselves more easily to design automation.
Various ad hoc techniques can be applied to ensure that a design is testable.
Such techniques essentially improve controllability, observability, and
predictability of a design. Some of these techniques are fairly simple and can
be implemented with minimum overhead. In addition, they aid in the
development and debugging of the circuit and its test program. Brief
descriptions of some ad hoc testability guidelines are described in the
following sections.
5-2
Design for Testability
Improving Testability Via Unused Pins
5.2
Improving Testability Via Unused Pins
Observability of an internal node can be accomplished by connecting the
node to an unused package pin (if available), as illustrated in Figure 5–1.
Figure 5–1.
Observing an Internal Node
PAD
Test Pin
Unused package pins can also be used to control internal nodes that are
difficult to access otherwise. The circuit shown in Figure 5–1 has been
modified to allow the injection of test signals (ENABLE high) or to operate
normally (ENABLE low). Figure 5–2 illustrates the reconfigured circuit.
Figure 5–2.
Test Signal Injection
Test Signal
PAD
ENABLE
PAD
Ad Hoc Testability Practices
5-3
Using Bidirectional Pins
5.3
Using Bidirectional Pins
Using bidirectional buffers instead of single-mode input and output buffers
increases the effectiveness of the package pins. In Figure 5–3 data flows
from INA to OUTB. In TEST mode (ENABLE high), test data and control
signals enter OUTB and test results are read out at INA.
Figure 5–3.
Bidirectional Pins Giving Access to Internal Nodes
ENABLE
Test Data Out Bus
INA
PAD
Core
Logic
Core
Logic
PAD
Test Data In
5-4
Design for Testability
OUTB
Initializing the Circuit to a Known State
5.4
Initializing the Circuit to a Known State
The entire circuit must be initializable to a known state, regardless of its
current state. To easily predict the output of a circuit, all latches and flip-flops
must have set or reset capability. Circuits that never need to be set to a
particular state during normal operation (such as frequency dividers) also
require a set/reset capability, or must be capable of being initialized through
a shift register scan path. The tester needs to know how many pulses to apply
before the first pulse appears on the output, and this depends on the initial
state of the circuit.
Figure 5–4 shows a state machine with three states. No combination of
select and clock inputs can initialize the circuit to a known state.
Figure 5–4.
Uncontrollable State Machine
10
D
Q
D
01
Q
11
QZ
QZ
CLOCK
SELECT
Output
By using a flip-flop with a clear, as shown in Figure 5–5, it is possible to force
state 00. Successive clock pulses then select states 10, 11, and 01. State
verification can be made from this list:
State 00—Output always 1
State 10—Output equals inverse of SELECT
State 11—Output always 0
State 01—Output equals SELECT
Ad Hoc Testability Practices
5-5
Initializing the Circuit to a Known State
Figure 5–5.
Using Clear to Add Controllability
00
D
Q
QZ
D
Q
QZ
10
01
11
CLEAR
CLOCK
SELECT
Output
A power-on clear mechanism, which initializes the circuit in the actual system
configuration, is not an adequate test initialization implementation. Although
this function must also be tested, the tester loses many of its utility programs
if initialization is performed only in this manner, and overall testing suffers
dramatically. By adding the special set or reset signal (Figure 5–5), the circuit
can be directly set into a known state, and the tester is guaranteed to have
the first pulse appear after a known number of cycles. All of the tester’s utility
programs remain intact.
5-6
Design for Testability
Avoiding Asynchronous Circuitry
5.5
Avoiding Asynchronous Circuitry
For asynchronous systems, changes in the output state depend on circuit
delays that are a function of wafer processing. Due to the variation in process
parameters, there is no guarantee of exactly when an output changes state.
It may be at the end of one cycle or at the beginning of another. Because the
test vectors must be determined before the test is started, it is very difficult to
keep the tester synchronized with the circuit. Therefore, testing asynchronous
circuitry is difficult and costly (and in some cases, impossible).
In an asynchronous SR latch, such as in Figure 5–6 a, set and reset signals
can change state at any time, causing the output to change state at any time
during any period. The output transition is dependent on the delays that
create the set and reset signals. Addition of the clock, shown in Figure 5–6
b, ensures that if the set or reset signal changes state, the output changes
only after the next clock transition.
Figure 5–6.
Add Clock to Asynchronous Latch
(a)
S
Y
Y
R
(b)
S
Y
CLOCK
Y
R
Ad Hoc Testability Practices
5-7
Avoiding Gated Clocks
5.6
Avoiding Gated Clocks
Gating clocks creates an asynchronous circuit. The extra delay through the
gate unsynchronizes the gated clock from the original system clock.
Unwanted glitches on the gated clock can be the result, as shown in Figure
5–7(a). The safest approach is to use an enabled edge-triggered flip-flop, as
shown in Figure 5–7(b). The timing for this circuit is more tolerant of
propagation delays.
Figure 5–7.
Gated Clock and Alternative
(a) Gated Clock
Clock
Gate
Gate Delay
Second
Clock
Gated Clock
Ideal Timing
Slight Delay in
Gate Signal
(b) Edge-Triggered Clock
Clock
Margin
Enable
Output
Ideal Timing
5-8
Design for Testability
Slight Delay in Enable
Allowing Internal Clocks to Be Bypassed From Circuit’s Inputs
5.7
Allowing Internal Clocks to Be Bypassed From Circuit’s Inputs
On-chip oscillator circuitry or other periodic pulse generating circuitry makes
synchronization of the tester and the circuit very difficult (Figure 5–8 a). By
allowing these clock signals to be bypassed and generated by the tester, the
tester is automatically synchronized with the circuit (Figure 5–8 b). Output the
bypassed clock signal as a circuit test.
Figure 5–8.
Bypass Internal Clock Generators
(a)
(b)
Oscillator Out
Oscillator
Clock
Signal
Oscillator
Test Clock
Test Select
M
U
X
Clock
Signal
Ad Hoc Testability Practices
5-9
Allowing Counters and Dividers to Be Bypassed
5.8
Allowing Counters and Dividers to Be Bypassed
Bypassing sequential circuits decreases the number of test vectors required
to test the device and reduces the test time. The sequential circuitry is tested
once and then is bypassed while the rest of the circuit is being tested.
When a divider is used to convert a 1-MHz clock signal to 1 kHz, the tester
must apply 1000 test vectors for each 1-kHz pulse (Figure 5–9a). However,
when bypass circuitry is available, the divider can be tested once and then
bypassed. The circuitry controlled by the divider can then be tested at a much
higher frequency by using a 1-kHz clock directly, reducing test time (Figure
5–9 b). Output the bypassed counter/divider signal as a circuit test.
Figure 5–9.
Bypass Counters and Dividers
(a)
(b)
Divider Out
1-MHz
Clock
1000:1 Divider
1-kHz
Clock
1-MHz
Clock
1000:1 Divider
Test Clock
Test Select
5-10
Design for Testability
M
U
X
1-kHz
Clock
Splitting Long Counter Paths
5.9
Splitting Long Counter Paths
Long counter paths should be split into smaller testable modules. For
example, a 16-bit counter requires 65 536 test patterns for full functional test.
However, the same counter implemented using two 8-bit counters coupled
with additional control circuitry, as shown in Figure 5–10, requires only 259
test patterns. The testing sequence can be performed by following these
steps:
1) Clear both counters and enter TEST mode
(TEST/NORM = Logic 1).
2) Apply 255 clock pulses; the test pin should be high.
3) Reset TEST/NORM to logic 0 and apply one additional clock pulse; the
test pin should now be low, proving correct operation of both counter
sections.
Figure 5–10. Long Counter Path Divided for Testing
TEST/NORM
CLK
A1
CLR1
QA1
QB1
QC1
QD1
Q0
Q1
Q2
Q3
QA2
QB2
QC2
QD2
Q4
Q5
Q6
2:1 MUX
S
A
B
A2
RESET
CLR2
Dual 4-Bit
Ripple Counter
Y
A1
CLR1
A2
Q7
CLR2
QA1
QB1
QC1
QD1
Q8
Q9
QA
QB
QA2
QB2
QC2
QD2
QC
QD
QE
QF
Dual 4-Bit
Ripple Counter
Test Pin
PAD
Ad Hoc Testability Practices
5-11
Multiplexing to Provide Direct Access to Logic
5.10
Multiplexing to Provide Direct Access to Logic
In the following examples, test data and test enable signals can come from
either external pins or test structures like those previously discussed. In
Figure 5–11, an output multiplexer in normal mode passes data from Logic B
to the output. The ENABLE line switches the multiplexer to pass data from
Logic A to the output, which provides observability for Logic A.
Figure 5–11. Multiplexing an Output Pin to Improve Observability
ENABLE
S
Output
A
Y
DATA IN
Logic
A
PAD
Logic
B
PAD
B
2:1 MUX
In Figure 5–12, a multiplexer gives controllability to Logic B by allowing the
input pin DATA to be connected directly to Logic B, bypassing Logic A.
Figure 5–12. Multiplexing an Input Pin to Improve Controllability
ENABLE
S
Output
A
Y
DATA IN
Logic
A
PAD
Logic
B
PAD
B
2:1 MUX
In Figure 5–13, testability for both logic blocks is enhanced by using both
input and output multiplexing.
5-12
Design for Testability
Multiplexing to Provide Direct Access to Logic
Figure 5–13. Multiplexing Both Inputs and Outputs to Improve Testability
ENABLE 1
ENABLE 2
S
S
Output
A
Y
A
Y
PAD
DATA IN
Logic
A
PAD
Logic
B
B
B
2:1 MUX
2:1 MUX
Of the three flip-flops shown in Figure 5–14, only the last flip-flop connects to
a package pin. If a 4:1 multiplexer is added, as shown in Figure 5–15, each
flip-flop output can be connected individually to the output pin.
Figure 5–14. Example of Unobservable Flip-Flop Outputs
Output
Q
DATA
D
Q
D
QZ
CLRZ
Q
D
QZ
CLRZ
PAD
QZ
CLRZ
RESET
CLOCK
Figure 5–15. Flip-Flop Outputs Made Observable With a Multiplexer
4:1 MUX
ENABLE 1
ENABLE 2
A
B
C0
C1
Q
DATA
D
QZ
CLRZ
RESET
CLOCK
Q
D
QZ
CLRZ
Y
PAD
C2
C3
Q
D
Output
QZ
CLRZ
Hi
Lo
Tie-Off
Ad Hoc Testability Practices
5-13
Breaking Feedback Paths in Nested Sequential Circuits
5.11
Breaking Feedback Paths in Nested Sequential Circuits
In sequential circuits, the next state is a function of the present state and
current stimulus while the present state is determined by the stimulus applied
previously. Therefore, multiple patterns need to be applied to control or
observe the sequential circuit. The length of the test pattern increases
dramatically if one sequential circuit feeds back to another sequential circuit.
This is also known as nesting of sequential circuitry.
In Figure 5–16 a, many vectors are required to stimulate the modules or to
pass the response to the rest of the circuit. By partitioning the sequential
circuits and breaking the feedback paths, controllability and observability can
be improved (Figure 5–16 b).
Figure 5–16. Nesting of Sequential Circuits
(a)
In
Sequential
Circuit
Sequential
Circuit
Sequential
Circuit
Out
Sequential
Circuit
Out
(b)
In
Sequential
Circuit
Sequential
Circuit
MUX
MUX
MUX
MUX
MUX
TEST IN
5-14
Design for Testability
Allowing Redundant Circuitry to Be Tested
5.12
Allowing Redundant Circuitry to Be Tested
Redundant circuitry is often included to improve performance, reliability, or
fabrication yields. Access must be provided to allow both portions of circuitry
to be tested separately to ensure that they both work.
Figure 5–17 (a and b) shows a circuit with an OR gate configuration on the
output. This type of circuit is inherently untestable unless the sections can be
individually disabled by adding circuitry. Two test inputs as shown in (b) are
required if the two disable signals cannot be derived from logic elsewhere in
the core logic.
An alternative solution is to eliminate any unnecessary redundant logic.
Figure 5–17. Redundant Circuitry
(a)
(b)
Test A
Logic A
In
Logic A
Out
Logic B
In
Out
Logic B
Test B
Ad Hoc Testability Practices
5-15
Watching for Signals That Reconverge
5.13
Watching for Signals That Reconverge
Signals that fan out in multiple directions from a single source and later
reconverge at the inputs to a functional module can create logic hazards and
untestable circuits.
The circuit shown in Figure 5–18 a is hazard-free but has an untestable fault.
If B and C are both high, the output of G4 remains high regardless of the value
of G2. Therefore, a short at the output of G2 is not be detected. By breaking
the reconvergent path of the signal A, as shown in Figure 5–18 b, and by
making the test input high, the output of G2 can be tested. This additional
circuitry greatly enhances the testability of the circuit.
Figure 5–18. Reconverging Signals
(a)
A
B
(b)
A
G1
G2
G4
C
G1+G2+G3
B
G2
C
G3
G3
TEST
5-16
G1
Design for Testability
G4
G1+G2+G3
Decoupling Linked Logic Blocks
5.14
Decoupling Linked Logic Blocks
Decoupling normally linked logic blocks with AND gates so that each can be
tested separately is shown in Figure 5–19.. Once again, unused package
pins may be required to control the signal separation, unless unused states
from a decoder are available.
Figure 5–19. Decouple Circuit Blocks
Module
1
Module
2
CONTROL 1
DEGATE
CONTROL 2
Module
3
Ad Hoc Testability Practices
5-17
Johnson Counter Test Signal Generator
5.15
Johnson Counter Test Signal Generator
The Johnson counter shown in Figure 5–20 requires only two pins (MCLR
and CLK) to give 10 active-low test enable signals (T0Z-T9Z). T0Z stays
active during your design’s normal operation.
Figure 5–20. Johnson Counter to Minimize Test Pins
T0Z
T1Z
T2Z
T3Z
T4Z
T5Z
T6Z
T7Z
T8Z
T9Z
Q
D
QZ
CLRZ
CLK
MCLR
5-18
Design for Testability
Q
D
QZ
CLRZ
Q
D
QZ
CLRZ
Q
D
QZ
CLRZ
Q
D
QZ
CLRZ
Shift Register Test Signal Generator
5.16
Shift Register Test Signal Generator
Three pins (RESETZ, CLOCK, and TESTDATA) control the shift register
shown in Figure 5–21. An 8-stage shift register allows you to insert up to 256
unique codes, which can either be test data or patterns enabling specific
tests. Use RESETZ to inhibit the test function.
Figure 5–21. Test Signal Generator Using a Shift Register
RESETZ
CLRZ
CLOCK
TESTDATA
A
QA
QB
QC
QD
QE
QF
QG
QH
TESTDATA1
TESTDATA2
TESTDATA3
TESTDATA4
TESTDATA5
TESTDATA6
TESTDATA7
TESTDATA8
8-Bit Parallel-Out
Serial Shift Register
Ad Hoc Testability Practices
5-19
Shift Register Used to Obtain Observability
5.17
Shift Register Used to Obtain Observability
With the addition of an 8-bit shift register, the status of eight internal nodes is
transmitted via one output pin, as shown in Figure 5–22. Because only two
internal nodes drive output pins, other internal nodes in the logic are
unobservable. A shift register with a length of eight bits can be used to
transmit the status of eight shaded internal nodes to the TESTOUT pin. This
concept can be expanded to n bits as needed.
Figure 5–22. Shift Register Adding Observability to Buried Nodes
Hi
Lo
CLK2
LOAD
PAD
DATA
Module
A
Module
B
Module
C
OUT1
CLK
CKINZ
SERIN
SHLD
A
B
C
D
E
F
G
H
QH
PAD
TESTOUT
QHZ
8-Bit Parallel-Out
Serial Shift-Register
CLK1
5-20
Module
D
PAD
OUT2
Design for Testability
Chapter 6
Structured Testability Practices
This chapter discusses the benefits and limitations of scan design and
presents several scan design approaches.
Topic
Page
Structured Approaches to Designing for Testability . . . . . . . . . . 6–2
Clocked Scan Flip-Flop Design . . . . . . . . . . . . . . . . . . . . . . . . . . . 6–3
Multiplexed Flip-Flop Scan Design . . . . . . . . . . . . . . . . . . . . . . . . 6–5
Clock Skew and Edge-Triggered Flip-Flop Scan . . . . . . . . . . . . . 6–7
Guidelines for Flip-Flop Scan Design . . . . . . . . . . . . . . . . . . . . . . 6–10
Clocked LSSD Scan Flip-Flop Design . . . . . . . . . . . . . . . . . . . . . . 6–8
Scan Path Loading on Critical ac Path . . . . . . . . . . . . . . . . . . . . . 6–11
Bus Contention and Scan Testing . . . . . . . . . . . . . . . . . . . . . . . . . 6–12
Test-Isolation Modules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6–14
Where Scan Is Not Efficient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6–20
6-1
Structured Approaches to Designing for Testability
6.1
Structured Approaches to Designing for Testability
The introduction to ad hoc approaches discussed the need for observability
and controllability. These ad hoc techniques are point solutions. Scan
approaches are more structured. The structured scan approach favors
design automation and rule checking.
There are many varieties of scan design and each has its own impact on the
hardware. All of these techniques ease the problem of testability by making
the circuit appear to be structured as a combinatorial network. The nature of
scan design makes it very easy to control and observe every register/latch
(logic storage) element in the circuit.
The basic concept involves serially shifting test data into the logic storage
elements and scanning out the test results. This allows initialization of all the
logic storage elements to desired states and permits the contents of the
buried logic storage elements to be examined easily.
6-2
Design for Testability
Clocked Scan Flip-Flop Design
6.2
Clocked Scan Flip-Flop Design
The clocked scan flip-flop has separate clock and data inputs for scan-test
and system modes, as shown in Figure 6–1. The flip-flop inputs DATA (D) and
SCANIN DATA (SD) represent the system and scan-test data inputs. The D
input is clocked into the flip-flop by CLOCK. The SD input is clocked into the
flip-flop by SCAN CLOCK. The output (Q) and SCANOUT (SO) outputs are
logically equal. The output SO has a weak drive. This results in long clock-toscanout propagation times, reducing the chance of skew in the scan clock
distribution network from causing timing race conditions during scan shifting.
The SO also isolates the loading of the scan path from the system output Q.
Figure 6–1.
Clocked Scan Flip-Flop
DATA
D
Q
DATA OUT
SO
SCANOUT
CLOCK
SCANIN DATA
SD
SCAN CLOCK
Interconnecting several clocked scan macros gives the circuit a serial scan
shift capability that reduces the testing of a sequential circuit to the testing of
a combinatorial circuit, as shown in Figure 6–2. The SO output of one flip-flop
feeds the SD input of the next flip-flop. This is repeated until the scan path is
formed. The TI library offers clocked scan flip-flop macros.
Structured Testability Practices
6-3
Clocked Scan Flip-Flop Design
Figure 6–2.
DATA IN
SCANIN
Clocked Scan Flip-Flop Circuit Interconnect
Logic
D
Q
Logic
D
Q
SO
D
Q
Logic
DATA
OUT
SD
SD
SD
Logic
SO
SO
SCANOUT
CLOCK
SCAN
CLOCK
The silicon overhead to implement clocked scan is in the range of 5 to 20
percent. Up to three additional pins are required to implement this scan style.
Only SCAN CLOCK is required to be dedicated; the remainder of the pins can
be shared with primary inputs and outputs.
6-4
Design for Testability
Multiplexed Flip-Flop Scan Design
6.3
Multiplexed Flip-Flop Scan Design
The multiplexed flip-flop scan method is very similar to the clocked-scan
approach but differs in the flip-flop design. The flip-flop has a single CLOCK
and a 2:1 multiplexer at the input, as shown in Figure 6–3. The multiplexer
inputs of DATA (D) and SCANIN DATA (SD) represent the system and test
data inputs selected by the SCAN ENABLE (SE) input signal. The Q output
of one flip-flop then feeds the SD input of the next flip-flop. This is done until
the scan path is formed, as shown in Figure 6–4. TI offers multiplexed scan
flip-flop macros.
Figure 6–3.
Multiplexed Scan Flip-Flop
D
/1
D
SD
SCAN ENABLE
1
MUX
Q
DATA OUT
QZ
DATA OUT
S
CLOCK
Figure 6–4.
Multiplexed Flip-Flop Scan Path
SCANIN
DATA IN
SCANOUT
Logic
SD
D Q
SE
Logic
SD
D Q
SE
Logic
SD
D Q
Logic
DATA OUT
SE
SCAN ENABLE
CLOCK
Structured Testability Practices
6-5
Multiplexed Flip-Flop Scan Design
There are some disadvantages. Adding logic into the data path limits the
speed at which the circuit can be clocked. The hardware overhead is related
to the number of registers, because each requires a 2:1 multiplexer.
The silicon overhead to implement multiplexed flip-flop scan is in the range of
5 to 15 percent. Up to three additional pins are required to implement this type
of scan. Only the SCAN ENABLE pin must be dedicated; the remainder of the
pins can be shared with primary inputs and outputs.
6-6
Design for Testability
Clock Skew and Edge-Triggered Flip-Flop Scan
6.4
Clock Skew and Edge-Triggered Flip-Flop Scan
Edge-triggered flip-flop scan relies on minimal clock skew in the clock
distribution network. You can inadvertently introduce clock skew, as
demonstrated in the following two examples.
❏
You decide to use a clock signal that is the input to a clock distribution
macro. This clock signal becomes significantly skewed relative to the
clock signal from the clock distribution macro’s output.
❏
The ATPG tools do not allow gated or internally generated clocks. You
can isolate the gated or internally generated clocks with a SCAN clock
that meets all the scan rules. Typically, this is done by adding a
multiplexer to the clock paths. During normal mode, the multiplexer
selects the gated or internally generated clock. This technique meets
scan design rules but also introduces clock skew.
If two successive scan path flip-flops have significantly skewed scan clocks,
where the first scan flip-flop is clocked before the second scan flip-flop, a
timing race condition may exist. The first scan flip-flop captures the next scan
data bit using the earlier scan clock, and its Q output changes and races to
the second scan flip-flop along with the later scan clock. If the scan data
arrives first, this scan data is clocked into both scan flip-flops. The scan data
appears to jump across the first scan flip-flop directly into the second scan
flip-flop on a single scan clock cycle.
When this type of jump occurs, the ATPG test patterns interpret it as detecting
a stuck-at-fault and reject the circuit. Simulation of the scan shift operation is
the only way to verify that scan clock skew does not cause jumping.
Structured Testability Practices
6-7
Clocked LSSD Scan Flip-Flop Design
6.5
Clocked LSSD Scan Flip-Flop Design
The clocked LSSD scan flip-flop, shown in Figure 6–1, is a derivative of the
clocked scan flip-flop. The flip-flop inputs DATA (D) and SCANIN DATA (SD)
represent the system and scan-test data inputs. The D input is clocked into
the flip-flop by CLOCK (edge-triggered). The SD input is clocked into the flipflop by TMC and TSC (two-phase non-overlapping clocks). The output (Q)
and SCANOUT (SQ) outputs are logically equal. The SQ output also isolates
the loading of the scan path from the system Q output.
The Level-Sensitive Scan Design (LSSD) method is a very well-known
approach. LSSD eliminates scan chain race conditions and other possible
test problems related to clock skew, rise/fall times, and minimum circuit
delays.
Figure 6–5.
Clocked LSSD Scan Flip-Flop
DATA IN
D
CLOCK
>
SCANIN DATA
SD
MASTER SCAN CLOCK
TMC
SLAVE SCAN CLOCK
TSC
Q
SQ
DATA OUT
SCANOUT
Interconnecting several clocked LSSD scan flip-flops gives the circuit a serial
shift capability that reduces the testing of a sequential circuit to the testing of
a combinatorial circuit, as shown in Figure 6–6. The SQ output of one flip-flop
feeds the SD input of the next flip-flop. This is repeated until the scan path is
formed. The TI library offers clocked LSSD scan flip-flop macros.
6-8
Design for Testability
Clocked LSSD Scan Flip-Flop Design
Figure 6–6.
Clocked LSSD Scan Flip-Flop Circuit Interconnect
CLOCK
DATA IN
L
O
G
I
C
D
Q
>
SD
TMC
TSC
SQ
L
O
G
I
C
D
Q
>
SD
TMC
TSC
SQ
L
O
G
I
C
D
Q
>
SD
TMC
SQ
L
O
G
I
C
DATA OUT
TSC
SCANIN DATA
SCAN OUT
MASTER SCAN CLOCK
SLAVE SCAN CLOCK
The silicon overhead to implement clocked LSSD scan is in the range of 5 to
20 percent. Up to four additional pins are required to implement clocked
LSSD scan, which can affect the circuit size and package selection. Only the
Master Scan Clock and the Slave Scan Clock must be dedicated; the Scanin
data and Scanout data can be shared with primary inputs and outputs.
Structured Testability Practices
6-9
Guidelines for Flip-Flop Scan Design
6.6
Guidelines for Flip-Flop Scan Design
The following design requirements must be met for successful flip-flop-based
scan designs:
❏
All stored states must be in scan flip-flops. Cross-coupled latches are not
permitted.
❏
All flip-flops in a scan path must have the same common clock. No logicgenerated or asynchronous clocks are permitted.
❏
One-shot delays and asynchronous timing are not permitted.
❏
All logic feedback paths must pass through scan flip-flops.
❏
All resettable scan flip-flops must be resettable only via a master or global
reset. Resettable flip-flops are not required. Initialization can be
accomplished by scanning in the initial state.
❏
No race condition may result from the application of a pulse at one
external clock input while the other external clock inputs are held inactive
and the remaining external inputs are stable.
Refer to the applicable (TGC2000, TSC4000, etc.) macro library summary for
macros that are available to support flip-flop-based scan designs.
6-10
Design for Testability
Scan Path Loading on Critical ac Path
6.7
Scan Path Loading on Critical ac Path
Some scan implementations route the scan path off the macro’s signal path.
A long scan path on an ac speed-critical node can cause unacceptable delay.
The scan path can be separated from the signal path in the following manner.
Select a scan element with both true and complementary outputs. In Figure
6–7, a multiplexed flip-flop scan macro is chosen and the speed critical path
is the true output. The scanout is taken from the complementary output. An
inverter is placed after the complementary output to restore the signal polarity
prior to the next scan flip-flop on the scan path. Some ATPG software tools
can handle scan path inversions, making the addition of the inverter in the
scan path to restore polarity unnecessary.
Figure 6–7.
Isolate Scan Path Loading
SCANIN
DATA IN
SCANOUT
Logic
SD
Q
D
SE QZ
Logic
SD
D Q
SE QZ
Logic
SD
D Q
Logic
DATA OUT
SE QZ
SCAN ENABLE
CLOCK
Structured Testability Practices
6-11
Bus Contention and Scan Testing
6.8
Bus Contention and Scan Testing
Device damage or data corruption can occur during scan testing as a result
of bus contention. The contention can occur when scanning in data through
registers that control 3-state drivers on a bus. As data is scanned, the
registers probably contain states that force contention. Figure 6–8 is an
example of a circuit containing contention hazards.
Figure 6–8.
Bus Contention Hazard
SCAN ENABLE
Out
A
B
C
D1
D Q
SE
SD
D2
D Q
SCANOUT
SE
SD
D3
SCANIN
CLOCK
D Q
SE
SD
Bus contentions can exist if more than one scan register contains a logic
1 during scanin or scanout.
The contention hazard must be removed by the addition of 3-state disabling
circuitry. The disabling circuitry is activated with a scan-enable signal. This is
the same enable signal used to control the multiplexer in the scan flip-flop. An
LSSD or clocked scan design would need a signal generated off a test-mode
pin. Figure 6–9 shows the circuitry added to eliminate the contention hazard.
6-12
Design for Testability
Bus Contention and Scan Testing
Figure 6–9.
Scan 3-State Disabling Logic
SCAN ENABLE
Out
A
B
C
D1
D Q
SE
SD
D2
D Q
Disabling Logic
SCANOUT
SE
SD
D3
SCANIN
D Q
SE
SD
CLOCK
Structured Testability Practices
6-13
Test-Isolation Modules
6.9
Test-Isolation Modules
Full scan techniques provide a straightforward approach to ASIC testing for a
high fault grade. For large, register-intensive designs, the full scan technique
results in very long scan paths. Multiple scan path designs reduce the costs
of test vector generation and fault simulation. Parallel testing of the modules
also reduces test time.
6.9.1
Multiple Scan Paths
Parallel scan design is another approach to testing isolated modules. Parallel
scan testing includes partitioning the circuit into modules and then testing the
modules using scan. There are several ways to partition the circuit as shown
in Figure 6–10.
Figure 6–10. Partition Into Test-Isolation Blocks
ROM
RAM
Serial
Peripheral
Interface
MegaModule
System
Controller
Serial Communications
Interface
Parallel
Scan Blocks
The following is a list of suggested partitions:
6-14
❏
Partition circuitry between bus interfaces. The bus interface boundary
provides a natural partition.
❏
Partition stand-alone functions. Large designs are usually designed and
simulated in blocks. Often the blocks are designed concurrently by
different designers. Extend the block responsibility to include test-vector
generation and fault simulation.
Design for Testability
Test-Isolation Modules
❏
Partition logic to reduce the number of scan macros to fewer than 750 per
logic block. This allows parallel testing of multiple paths rather than serial
testing of one long path. Parallel test time is determined by the longest
path. For this reason, the parallel paths should be of comparable lengths.
In Figure 6–11, Figure 6–12, and Figure 6–13, all the SCANIN and
SCANOUT data pins can be multiplexed with other operational functions.
Structured Testability Practices
6-15
Test-Isolation Modules
Figure 6–11. Multiple Clocked Scan Flip-Flop Scan Paths
Die Boundary
SYSTEM
CLOCK
Global System Clock
SCANIN1
SCANOUT1
Block 1
SCANIN2
SCANOUT2
Block 2
SCANIN3
SCANOUT3
Block 3
SCAN CLOCK
6-16
Design for Testability
Test-Isolation Modules
Figure 6–12. Multiple Multiplexed Flip-Flop Scan Paths
Die Boundary
SYSTEM
CLOCK
Global System Clock
SCANIN1
SCANOUT1
Block 1
SCANIN2
SCANOUT2
Block 2
SCANIN3
SCANOUT3
Block 3
SCAN ENABLE
Structured Testability Practices
6-17
Test-Isolation Modules
Figure 6–13. Multiple Clocked LSSD Scan Paths
Die Boundary
SYSTEM
CLOCK
Global System Clock
SCANIN1
SCANOUT1
Block 1
SCANIN2
SCANOUT2
Block 2
SCANIN3
SCANOUT3
Block 3
2
MASTER SCAN CLOCK
SLAVE SCAN CLOCK
6.9.2
Multiple Scan Path Patterns
During testing, the scan data is first shifted into the device one bit per tester
period into the scan path. After the scan data has been shifted into the device,
6-18
Design for Testability
Test-Isolation Modules
the tester then applies the input stimuli and the device under test returns to
the normal mode of operation. Afterward, the response of the device is
captured and shifted out for comparison. Normally, the scan result is shifting
out while the new scan data is shifting in.
As stated earlier, the longest scan path determines the length of the scan test
vector. Because all the paths are being tested in parallel, it is necessary to
add elements for the shorter paths so all vectors are equal in length. Figure
6–14 is an example of the elements added to the short scan vectors. These
elements are don’t cares on the inputs and masks on the outputs.
Figure 6–14. Scan Vectors for Multiple Scan Blocks
SCANIN Vector
SCANOUT Vector
SCAN
PATH
1
HHLLHLLHLLLHLLLHLH010101101101101101
SCAN
PATH
2
YYYLHLHLHLLHLLHLLH010110110111101MMM
SCAN
PATH
3
YYYYYYYHLHHLLHLLHL11011101110MMMMMMM
First Bit In
Logic One Input = H
Logic Zero Input = L
Don’t Care Input = Y
First Bit Out
Logic One Output = 1
Logic Zero Output = 0
Mask Output = M
Structured Testability Practices
6-19
Where Scan Is Not Efficient
6.10
Where Scan Is Not Efficient
Although scan, as a structured design approach, is a very powerful
methodology, there are certain circuit structures where other test methods
such as PMT or BIST are more efficient, for example:
❏
❏
❏
❏
Large macro functions (e.g., microprocessor cores)
Compiled cells (e.g., RAMs, ROMs, and ALUs)
Register files
Any nondigital circuitry
A scan path is often used around these circuit structures to ensure that proper
data and control signals are being supplied by surrounding logic. A scan ring
is formed by placing a scannable latch or register on all signals entering or
leaving the circuit structure (Figure 6–15).
Figure 6–15. Scan Path Around a Function
DATA IN
DATA IN
SCANIN
Scan
Element
ADDRESS
RAM
SCAN_ENABLE
MUX
S
DATA OUT
ADDRESS
Scan
Element
I
I
Y
DATA OUT
SCANOUT
Scan
Element
R/W
R/W
Scan
Element
ENABLE
ENABLE
Surrounding
Logic In
6-20
Scan
Element
Design for Testability
Surrounding
Logic Out
Chapter 7
IEEE Standard 1149.1-1990
This chapter explores the IEEE Standard 1149.1-1990 and the applications
to testing printed circuit boards in a surface-mount environment.
Topic
Page
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7–2
Boundary-Scan Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7–3
7-1
Overview
7.1
Overview
The IEEE Standard 1149.1-1990, IEEE Standard Test Access Port and
Boundary-Scan Architecture (JTAG) foreword states, “This standard defines
a test access port and boundary-scan architecture for digital integrated
circuits and for the digital portions of mixed analog/digital integrated circuits.
The facilities defined by the standard seek to provide a solution to the problem
of testing assembled printed circuit boards and other products based on
highly complex digital integrated circuits and high-density surface-mount
assembly techniques. They also provide a means of accessing and
controlling design-for-testability features built into the digital integrated
circuits themselves. Such features might, for example, include internal scan
paths and self-test functions as well as other features intended to support
service applications in the assembled product.”
The IEEE Standard 1149.1 is usually applied by system designers. For this
reason, system designers have a greater role in defining the specifications for
ASICs. To ensure that the ASICs work properly with other IEEE Standard
1149.1 test components, you as the ASIC designer must become familiar with
this standard.
7-2
Design for Testability
Boundary-Scan Architecture
7.2
Boundary-Scan Architecture
Figure 7–1 shows the boundary-scan architecture specified by IEEE
Standard1149.1. The boundary-scan architecture uses the following
hardware components:
❏
❏
❏
❏
❏
❏
Figure 7–1.
Test access port controller (TAP)
Instruction register (IR)
Boundary-scan register (BSR)
Device identification register (IDR)
User test data register (UTDR)
Bypass register (BR)
Boundary-Scan Architecture
ASIC Outputs
Core Logic
Register
ASIC Inputs
Boundary
Scan
UTDR
IDR
VCC
BR
TDI
TMS
TCK
TRSTZ
TAP
8-Bit IR
TDO
Denotes Optional Structures
IEEE Standard 1149.1-1990
7-3
Boundary-Scan Architecture
7.2.1
Test Access Port Controller (TAP)
The test access port (TAP) controller integrates instructions on the test-mode
select line in accordance with the timing established on TCK. It generates
clock and control signals for the rest of the components used to implement
IEEE Std 1149.1.
7.2.2
Instruction Register (IR)
The instruction register (IR) allows boundary-scan test instructions to be
loaded into the ASIC. The boundary-scan test data registers are addressed
via the instruction register.
7.2.3
Boundary-Scan Register (BSR)
The boundary-scan register (BSR) is made up of individual test cells that form
the boundary-scan path. These cells form a partition around the device
between the I/O cells and the core logic that can be used for a variety of test
purposes, including continuity testing of PCB interconnects, I/O sampling,
and insertion of known values at I/O points.
7.2.4
Device Identification Register (DIR)
The device identification register (DIR) is an optional register used for a
variety of identification purposes, such as a manufacturer ID code, device
registration number, or device revision number.
7.2.5
User Test Data Register (UTDR)
The upper test data register (UDTR) is an optional register that allows
manufacturers to incorporate design-specific test-related features.
7.2.6
Bypass Register (BR)
The bypass register (BR) is a single-bit register that can be switched into the
boundary-scan path so that the ASIC is bypassed during testing. This allows
the testing of other boundary-scan compatible ICs more efficiently by
reducing the total boundary-scan path length to that of the IC under test.
7-4
Design for Testability
Boundary-Scan Architecture
7.2.7
Boundary-Scan Macro
The boundary-scan macros are placed around the periphery of the die next
to the I/O structures. The general-purpose boundary-scan macro has the
capability to capture, shift, and update.
Figure 7–2 and Figure 7–3 depict the boundary-scan circuitry.
Figure 7–2.
General-Purpose Boundary-Scan Macro
SCANOUT
MODE
G1
SIGNAL IN
1
1
SHIFT/LOAD
SIGNAL OUT
G1
1
1
1D
C1
SCANIN
CLOCK A
1D
C1
CLOCK B
IEEE Standard 1149.1-1990
7-5
Boundary-Scan Architecture
Figure 7–3.
Boundary-Scannable PCB
Boundary-Scan Cell
Serial
DATA IN
Serial
DATA OUT
Serial Test
Interconnect
7-6
Design for Testability
System
Interconnect
Chapter 8
Generic Test Access Port
This chapter introduces the generic test access port (GTAP), which is the
Texas Instruments ASIC test controller. A dedicated implementation example
is shown in Part 2 of this book, the Generic Test Access Port Application
Report.
Topic
Page
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8–2
Test Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8–3
Test Register—Bit Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8–5
Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8–7
Communication Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8–8
8-1
Overview
8.1
Overview
The generic test access port (GTAP) is the TI ASIC test controller. From the
device pins, the GTAP can be instructed to enable or disable any combination
of the design-for-testability features. Test features are controlled by the GTAP
unless another controller is present.
The GTAP is designed to consolidate all previous ad hoc ASIC test methods
into a single unified test methodology. It is general-purpose, compatible with
a wide range of tests, and expandable to accommodate future test needs,
hence the name generic. The GTAP is divided into two functions. They are
the test register and the GTAP controller. The GTAP block diagram is shown
in Figure 8–1.
The GTAP implementation requires one dedicated package pin, four smart
control pins, and one smart output pin. Smart pins are pins that have a test
function in the test mode and a user-defined function in the normal operating
mode.
The TEST input to the GTAP controller must be dedicated to the test mode
operation. The remaining GTAP controller inputs (SCAN, MCLK, and SCLK)
are test-access protocol pins and can be implemented as smart pins. The
SCANIN input to the GTAP test register is referred to as the test instruction
pin and can be implemented as a smart pin. The SCANOUT output from the
GTAP test register can also be implemented as a smart pin.
Figure 8–1.
GTAP Block Diagram
GTAP
TWE
TEST
SCAN
MCLK
SCLK
GTAP
Controller
(TP012 or
TP0B2)
TEST1
TEST2
GTT
Test Register
(TP000s or
TP0B0s)
GST
SCANOUT
SCANIN
Enable Test
Function 1
8-2
Design for Testability
Enable Test
Function 2
...
Enable Test
Function N
Test Register
8.2
Test Register
The test register is an n-bit serial shift register, each bit corresponding to a
specific test feature. Each ASIC test is selected by an n-bit code. Thus, the
test register can also be interpreted as a test instruction register. It is loaded
by shifting in n bits. Its serial nature economizes on ASIC resources (gates
and interconnect).
The test register is composed of TI TP000 (or TP0B0) macros (shown in
Figure 8–2) daisy-chained together. The TP0B0 is the BiCMOS version of the
TP000. The TP0B0 can substitute for the TP000 in the following descriptive
sections.
Figure 8–2.
TP000 (Test Register Building Block)
TP000 or TP0B0
GBUSENZ (LOW)
GTSTEN (TEST1 OR TEST2)
MSEL
Master
SCANIN
D
GTT
C
Q
Slave
D
Q
SCANOUT
C
GST
Figure 8–3 illustrates how TP000 macros are integrated to form a test
register. The TP000 macros are chained together through their SCANIN and
SCANOUT signals. The SCANIN of the first TP000 is connected to an input
pin. The SCANOUT of the last TP000 is connected to an output pin. Most of
the remaining TP000 input signals (GTT, GST, and GBUSENZ) are
connected in parallel. The GTSTEN signals are also connected in parallel but
in two groups. These two groups correspond to the test register bit test
function, either TEST1 or TEST2. Descriptions of TEST1 and TEST2 are
presented later along with the GTAP controller.
Generic Test Access Port
8-3
Test Register
Figure 8–3.
Typical Test-Register Architecture
NORMAL OUT DISABLE
HIZ MSEL
TWE
TEST2
TEST1
LOW
GST
S
GTT
SCANIN
PAD
SCANOUT
TP000
GTAP_SCAN_IN
TP000
MSEL1
MSEL2
TEST1
8-4
Design for Testability
TP000
TP000
TP000
MSEL3
MSEL4
MSELn
TEST2
PAD
1
GTAP_SCAN_OUT
1
2:1 MUX
NORMAL
OUTPUT DATA
Test Register—Bit Definitions
8.3
Test Register—Bit Definitions
Each test register bit controls an ASIC test feature. TI has identified and
optimized a set of test features. Table 8–1 lists the currently identified test
features.
Table 8–1. Example Test-Register TP000 Assignments
TP000
Type
Function
PWRDN
TEST1
Turns off pullups and pulldowns
VIH_VIL
TEST1
Enables VIH/VIL output
SRAM_OFF
TEST1
Sets SRAMs to standby mode
VIH_VIL CLK
SELECT
TEST2
Selects VIH_VIL CLK
HI Z
TEST2
I/O disable (sets high-impedance)
PMT_I/O
TEST2
Enables parallel module test
datapaths
MSELA
TEST2
Enables MegaModule #1
MSELN
TEST2
Enables BIST #1
MSELT
TEST2
Expansion
Generic Test Access Port
8-5
Test Register—Bit Definitions
Table 8–2 lists the test register codes for selecting an ASIC test. The test
register order is arbitrary.
Table 8–2. Example Test-Register Test-Selection Codes
TEST1
TEST2
VIH_VIL
SRAM
CLK
PWRDN VIH/VIL OFF SELECT HI Z PMT_I/O MSELA MSELN MSELT
ASIC Test
PWRDN STATE
1
0
1
0
0
0
0
0
0
VIH/VIL_CLK_A
0
1
0
0
1
0
0
0
0
VIH/VIL_CLK_B
0
1
0
1
0
0
0
0
0
IIH/IIL/IOZ
CURRENT
1
0
0
0
1
0
0
0
0
PU/PD
CURRENT
0
0
0
0
1
0
0
0
0
VOL/VOH
1
0
0
0
0
0
0
0
0
PMT TEST
ENABLE
1
0
0
0
0
1
1
0
0
BIST TEST
ENABLE
1
0
0
0
0
0
0
1
0
EXPANSION
1
0
0
0
0
0
0
0
1
8-6
Design for Testability
Controller
8.4
Controller
The GTAP controller is the interface between the external device pins and the
test register. It also controls test function sequencing via a state machine.
Although the test register selects the test to be performed, the GTAP
controller enables the selected test.
The controller consists of five device pins: TEST, SCAN, MCLK, SCLK, and
SCANIN. Only TEST is dedicated; the rest can have normal input functions
but assume GTAP controller input functions when TEST is high.
TEST
Dedicated test pin (low = normal mode, high = test mode)
SCAN
Shared test pin option. While TEST is low, this pin behaves as a
normal input pin. While TEST is high, this pin behaves as a GTAP
controller input pin, and low-to-high transitions change the
controller state.
MCLK
Shared test pin option. While TEST is low, this pin behaves as a
normal input pin. While TEST is high, this pin behaves as a GTAP
controller input pin; a low level holds each TP000 master latch,
and a high level passes data through each TP000 master latch.
SCLK
Shared test pin option. While TEST is low, this pin behaves as a
normal input pin. While TEST is high, this pin behaves as a GTAP
controller input pin; a low level holds each TP000 slave latch, and
a high level passes data through each TP000 slave latch.
Generic Test Access Port
8-7
Communication Protocol
8.5
Communication Protocol
As shown in Figure 8–4, the device enters test mode when you set the
dedicated TEST pin high. The controller is in TEST1 state, as shown in Figure
8–4. The controller can be cycled through the remaining states, WRITE,
RESTORE1, TEST2, and RESTORE2, by toggling SCAN low-to-high. At any
time, returning TEST pin low exits the test mode.
Upon entering test mode (TEST high), any smart-controller I/O signals
(excluding TEST) must be internally latched. Thus, the core logic continues
to see the last normal pin values. This isolates the core logic from the
controller signals. These signals remain latched until TEST returns low.
The test port operates in two distinct testing levels, TEST1 and TEST2. These
two levels serve to better control the testing environment.
TEST1
Very mild test condition. The device state remains
unchanged. Minor test functions are enabled, pullup and
pulldown macros disabled, and VIH/VIL output enabled.
All device pins remain in normal mode.
TEST2
Serious test condition. The device state may change as a
result of performing one of these tests. Device pins may
be forced to change directions. TEST1 features are also
enabled during TEST2.
WRITE
Permits writing to the test register. Only the GTAP I/O pins
should be active. All remaining device pins remain in
normal mode. Because the shared controller I/O pins were
internally latched on entering test mode, loading the test
register does not disturb the device state if the normal
values are reapplied during the RESTORE1 state. The
scanout data from the test register are selected for the
output buffer.
RESTORE1
Permits the shared controller pins to return to normal
values without affecting the test register following WRITE
state.
RESTORE2
Permits the shared controller pins to return to normal
values without affecting the test register following TEST2
state.
Figure 8–4 is a state-transition diagram for the GTAP controller.
8-8
Design for Testability
Communication Protocol
Figure 8–4.
GTAP-Controller State Transition Diagram
Off
0
TEST
1
TEST1
0
TEST
1
N
L>H
SCAN
Y
WRITE
0
TEST
1
N
L>H
SCAN
Y
RESTORE1
0
TEST
1
SCAN
N
L>H
Y
TEST2
0
TEST
1
SCAN
N
L>H
Y
RESTORE2
0
TEST
1
SCAN
N
L>H
Y
Generic Test Access Port
8-9
Communication Protocol
8-10
Design for Testability
Chapter 9
Parallel Module Test
This chapter provides an overview of parallel module test (PMT). PMT
provides direct access to MegaModules from device pins.
See Part 4: Multiplexed Parallel Module Test Application Report for a detailed
discussion of PMT. Informative application examples are supplied.
Topic
Page
Parallel Module Test of MegaModules . . . . . . . . . . . . . . . . . . . . . 9–2
MegaModule Test Collar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9–4
Single MegaModule PMT I/O Hookup . . . . . . . . . . . . . . . . . . . . . . 9–5
PMT Test Bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9–6
Multiple MegaModule PMT I/O Hookup . . . . . . . . . . . . . . . . . . . . . 9–7
PMT for Analog MegaModules . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9–9
In-System Use . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9–21
9-1
Parallel Module Test of MegaModules
9.1
Parallel Module Test of MegaModules
TI supplies you with libraries of complex ASIC macro functions, called
MegaModules. Examples of MegaModules are RAMs and analog-to-digital
converters. You can integrate MegaModules into your logic as easily as
simple macros.
After fabrication, all ASIC devices must be tested. Testing an embedded
MegaModule with functional test vectors can be difficult or impossible.
MegaModules can be deeply buried within logic. Many functional test vectors
can be required for just one MegaModule access. MegaModules cannot be
tested efficiently this way.
Parallel module test (PMT) is designed to test MegaModules. PMT directly
accesses the MegaModules from device pins, bypassing the intermediate
logic. PMT permits efficient communication with MegaModules (in parallel as
opposed to serial). TI supplies test vectors for its MegaModules. The generic
test access port (GTAP) provides the control for PMT (Figure 9–1).
This chapter introduces a generic PMT implementation. A detailed
presentation is in Part 4: Multiplexed Parallel Module Test Application Report.
Analog MegaModules have some special PMT implementation
considerations. These special case implementations of PMT are also
presented in this chapter.
9-2
Design for Testability
Parallel Module Test of MegaModules
Figure 9–1.
GTAP-Controlled PMT Block Diagram
GTAP
TEST
SCAN
MCLK
SCLK
TWE
GTAP
Controller
(TP012 or
TP0B2))
Test Register
(TP000s or TP0B0s)
SCANIN
MegaModule
MegaModule
SCANOUT
MegaModule
TEST_INPUT Bus
TEST_OUTPUT Bus
Parallel Module Test
9-3
MegaModule Test Collar
9.2
MegaModule Test Collar
PMT requires that each MegaModule have a test collar. The test collar
provides the TEST_INPUT bus interface and it is constructed from library
components. Figure 9–2 shows a 2:1 multiplexer connected to each of the
MegaModule’s inputs. These multiplexers select either the normal or test
input signal into the MegaModule. The selection of normal or test mode is
controlled by the PMT_IO test signal. Figure 9–3 shows a single
MegaModule PMT implementation.
Figure 9–2.
MegaModule With a Test Collar
PMT_IO
MegaModule
2:1 MUX
S
NORM_IN
TEST_INPUT
9-4
A
B
Design for Testability
IN
OUT
NORM_OUT
TEST_OUT
Single MegaModule PMT I/O Hookup
9.3
Single MegaModule PMT I/O Hookup
MegaModule TEST_INPUT connections are passed through an input buffer
to the B terminal of the MegaModule’s collar input multiplexer. The input side
of a bidirectional buffer can be used as a TEST_INPUT connection if the
output portion of the buffer is disabled with the PMT_IO test signal. The
interconnect loading of the TEST_INPUT connection can be isolated from the
input buffer by an internal buffer as shown in Figure 9–3.
The MegaModule outputs connect to the B terminal of a multiplexer prior to
the output buffer. The multiplexer, prior to the output buffer, selects the core
logic out or the TEST_OUTPUT, depending on the PMT_IO test signal.
Because PMT passes the TEST_INPUT and TEST_OUTPUT signals
through the I/O buffers, there are few restrictions on the buffer types that can
be used. The GTAP controller inputs cannot be used for PMT TEST_INPUT
or TEST_OUTPUT signals.
Figure 9–3.
Single MegaModule PMT
Normal_Z
PMT_IO
A
B
2:1 MUX
S
Core Logic
PAD
A
Y
B
Input
Buffer
PAD
Output
Buffer
2:1 MUX
S
TEST_INPUT
A
B
Y
MegaModule
TEST_OUTPUT
Parallel Module Test
9-5
PMT Test Bus
9.4
PMT Test Bus
If a device has multiple MegaModules, all TEST_INPUT signals can be bused
together. Similarly, all TEST_OUTPUT signals can also be bused together.
The device’s TEST_INPUT or TEST_OUTPUT bus is as wide as the widest
MegaModule’s TEST_INPUT or TEST_OUTPUT bus, respectively.
When connecting two TEST_INPUT/TEST_OUTPUT buses, TI recommends
that like signals be bused together. For example, RAM MegaModule
TEST_INPUT signals are composed of address, control, and input data. The
address signal of one RAM MegaModule should be connected to the address
signals of another RAM MegaModule. The selection of the MegaModule
under test is controlled by the MSEL test signal.
Identical MegaModules should have their outputs hooked to the output bus in
a unique order to ensure that the correct MegaModule is being addressed
during PMT testing.
9-6
Design for Testability
Multiple MegaModule PMT I/O Hookup
9.5
Multiple MegaModule PMT I/O Hookup
MegaModule TEST_INPUT bus connections are passed through an input
buffer to the B terminal of the MegaModule’s collar input multiplexer. The input
side of a bidirectional buffer can be used as a TEST_INPUT connection if the
output portion of the buffer is disabled with the PMT_IO test signal. The
interconnect loading of the TEST_INPUT connection can be isolated from
the input buffer by an internal buffer, as shown in Figure 9–4.
MegaModule outputs connect to the TEST_OUTPUT bus through an internal
3-state inverter. When the MegaModule is deselected, its internal 3-state
buffer is placed in the high-impedance mode by MSEL. The polarity of the
TEST_OUTPUT bus must be reestablished with an inverter, unless the
output buffer is inverting. The multiplexer, prior to the output buffer, selects the
core logic out or the TEST_OUTPUT bus depending on the PMT_IO test
signal. A bus holder is required on the TEST_OUTPUT bus to keep it from
floating during normal operation.
Because this type of PMT passes the test buses through the I/O buffers, there
are fewer restrictions on the buffer types that can be used with TEST_IN and
TEST_OUT. The GTAP controller inputs cannot be used on either test bus.
Parallel Module Test
9-7
Multiple MegaModule PMT I/O Hookup
Figure 9–4.
PMT Test Bus Hookup
Normal_Z
PMT_IO
A
B
2:1 MUX
S
Core Logic
PAD
A
B
Input
Buffer
2:1 MUX
S
TEST_INPUT
BUS
A
B
Y
A
B
Y
Output
Buffer
MSEL1
MegaModule 1
2:1 MUX
S
PAD
Y
TEST_OUTPUT
BUS
MSEL2
MegaModule 2
Bus Holder
The following are PMT hookup rules.
9-8
❏
A dedicated signal pin is required to initiate the test mode of the operation
(TEST signal on the TP012 or TP0B2 GTAP).
❏
The TEST pin and the four GTAP controller pins (SCAN, SCANIN, MCLK,
and SCLK) are not available for PMT data signals.
❏
The IOG12, SW010, and SW012 buffers cannot be used for PMT data
signals.
❏
VREF pins and bias generator pins cannot be used for PMT data signals.
❏
The required maximum number of input test pins on any MegaModule
must not exceed the number of available intput buffers on the package
minus the five GTAP pins.
❏
The required maximum number of output test pins on any MegaModule
must not exceed the number of output buffers available in the package.
Design for Testability
PMT for Analog MegaModules
9.6
PMT for Analog MegaModules
PMT implementation for analog MegaModules has one important variation.
Analog signals connect directly to the analog MegaModule. Analog input
signals pass through analog input macros and connect directly to the
MegaModule’s analog inputs, bypassing the collar. MegaModule analog
output signals connect directly to analog output macros. All control signals
and nonanalog data signals are implemented using the standard PMT collar
and hookup method.
9.6.1
PMT for a Single Analog-to-Digital (A/D) Converter
Figure 9–5 and Figure 9–6 show the PMT implementation for single A/D
converter MegaModules. With the exception of the AIN signal, all
MegaModule TEST_INPUT signal connections are passed through an input
buffer to the B terminal of the MegaModule’s test collar input multiplexers. The
MegaModule’s test collar multiplexers select the core logic in or the
TEST_INPUT signal, depending on the PMT_IO test signal.
The MegaModule’s output signals connect to the B terminal of the
multiplexers prior to the output buffers. The multiplexers, prior to the output
buffers, select the core logic out or the TEST_OUTPUT signal, depending on
the PMT_IO test signal.
The analog input signals (AIN) pass through analog input buffers (SW010 or
IOG12) directly to the A/D MegaModule, bypassing the test collar.
The analog input buffer’s TEST_ENABLE signals are passed through an
input buffer to the B terminal of a test collar multiplexer at the analog input
buffer. The analog input buffer’s test collar multiplexer selects the core logic
in or the TEST_ENABLE signal, depending on the PMT_IO test signal.
Parallel Module Test
9-9
PMT for Analog MegaModules
Figure 9–5.
PMT for a Single Analog-to-Digital Converter
Core Logic
SW010
PAD
S
AC810
PAD
IOG12
AIN
D7
A
B
Y
PAD
Y
PAD
Y
PAD
S
A
B
PAD
Y
S
S
A
B
PAD
D0
Y
A
B
CLRZ
S
S
PAD
A
B
Y
CONVZ
SLEEP
A
B
S
PAD
A
B
Y
Normal_Z
PMT_IO
9-10
Design for Testability
A
B
PMT for Analog MegaModules
Figure 9–6.
PMT for a Single Video Band Analog-to-Digital Converter
Core Logic
AC811/812
S
A
B
PAD
Y
TESTCLRZ
TEST
S
A
B
PAD
PAD
IOG12
Y
S
AIN
A
B
SW010
D7
PAD
PAD
Y
PAD
Y
PAD
TDI7
S
A
B
D0
PAD
TDI0
S
PAD
A
B
Y
Normal_Z
PMT_IO
A
B
Parallel Module Test
9-11
PMT for Analog MegaModules
9.6.2
PMT for Multiple Analog-to-Digital Converters
If the device has multiple A/D converters, busing can be used. All
TEST_ENABLE inputs can be bused together. All TEST_INPUT inputs can
be bused together. All TEST_OUTPUT outputs can be bused together. A bus
holder (PB110) is required for each bit of the TEST_OUTPUT bus.
Identical MegaModules should have their outputs hooked to the
TEST_OUTPUT bus in a unique order to ensure that the correct MegaModule
is being addressed during PMT testing.
Figure 9–7 and Figure 9–8 are examples of PMT for multiple analog-todigital converters.
9-12
Design for Testability
PMT for Analog MegaModules
Figure 9–7.
PMT for Multiple Analog-to-Digital Converters
Core Logic
AC810
S
PAD
SW010
PAD
MSEL1
S
A
B
A Y
B
AIN D7
IOG12
PAD
S
A
B
Y
S
PAD
A
B
PAD
S
PAD
A
B
S
A Y
CLRZ
B
D0
S
SLEEP
CONVZ
AC810
PAD
Bus
Hold-
MSEL2
PAD
A
B
PAD
Bus
Holder
AIN D7
S
A
B
S
PAD
A
B
CLRZ
Bus
Holder
D0
Y
S
A Y
S
A
B
CONVZ
SLEEP
PAD
B
Normal_Z
A
B
Parallel Module Test
9-13
PMT for Analog MegaModules
Figure 9–8.
PMT for Multiple Video Band Analog-to-Digital Converters
Core Logic
AC811/812
PAD
TEST
A Y
B
S
PAD
TESTCLRZ
S
PAD
IOG12
SW010
IOG1
A
B
Y
MSEL1
AIN
PAD
PAD
S
A Y
B
D7
TDI7
S
A Y
B
D0
PAD
TDI0
AC811/812
Bus
Hold-
TEST
S
A
B
PAD
Y
S
MSEL2
A Y
B
PAD
AIN
IOG12
SW010
D7
PAD
TDI7
S
PAD
A Y
B
D0
TDI0
Normal
A
B
PMT_IO
9-14
Bus
Holder
TESTCLRZ
Design for Testability
PAD
PAD
PMT for Analog MegaModules
9.6.3
PMT for a Single Digital-to-Analog Converter
Figure 9–9 shows the PMT implementation for single D/A converter
MegaModules. All MegaModule TEST_INPUT signal connections are
passed through an input buffer to the B terminal of the MegaModule’s test
collar multiplexers. The MegaModule’s test collar multiplexers select the core
logic in or the TEST_INPUT signal, depending on the PMT_IO signal.
With the exception of the AOUT signal, the MegaModule’s TEST_OUTPUT
signals connect to the B terminal of the multiplexers prior to the output buffers.
The multiplexers, prior to the output buffers, select the core logic out or the
TEST_OUTPUT signal, depending on the PMT_IO signal.
The analog output signal (AOUT) passes directly from the D/A MegaModule
to an analog I/O buffer (IOG12).
The analog input buffer’s TEST_ENABLE signals are passed through an
input buffer to the B terminal of a test collar multiplexer at the analog input
buffer. The analog input buffer’s test collar multiplexer selects the core logic
in or the TEST_ENABLE signal, depending on the PMT_IO signal.
Parallel Module Test
9-15
PMT for Analog MegaModules
Figure 9–9.
PMT for a Single Video Band Digital-to-Analog Converter
DA811
S
IOG12
AOUT
PAD
A
PAD
B
S
S
A
B
A
B
PAD
TDO7
Y
Y
Y
PAD
Y
PAD
D7
S
TDO0
S
A
B
PAD
Y
D0
Normal_Z
A
B
PMT_IO
9.6.4
A
B
PMT for Multiple Digital-to-Analog Converters
If the device has multiple D/A converters, busing can be used. All
TEST_ENABLE inputs can be bused together. All TEST_INPUT inputs can
be bused together. All TEST_OUTPUT outputs can be bused together. A bus
holder (PB110) is required for each bit of the TEST_OUTPUT bus.
Identical MegaModules should have their outputs hooked to the
TEST_OUTPUT bus in a unique order to ensure that the correct MegaModule
is being addressed during PMT testing.
Figure 9–10 and Figure 9–11 are examples of PMT for multiple digital-toanalog converters.
9-16
Design for Testability
PMT for Analog MegaModules
Figure 9–10. PMT for Multiple Digital-to-Analog Converters
Core Logic
DA810
S
PAD
A
B
Y
CLRZ
AOUT
IOG12 PAD
S
PAD
AY
B
SLEEPZ
S
MSEL1
AY
B
S
PAD
A
B
Y
PAD
Y
TDO7
A Y
B
TDO0
S
A Y
B
PAD
D7
S
A
B
S
PAD
D0
DA810
S
AY
B
CLRZ
AOUT
IOG12 PAD
S
A
B
Y
SLEEPZ
MSEL2
Bus
Holder
S
PAD
AY
B
TDO7
Bus
Holder
S
AY
B
D7
TDO0
S
AY
B
PMT_IO
D0
A
B
Parallel Module Test
9-17
PMT for Analog MegaModules
Figure 9–11. PMT for Multiple Video Band Digital-to-Analog Converters
Core Logic
DA811
S
A Y
B
IOG12
AOUT
PAD
MSEL1
S
S
A Y
B
PAD
D7
S
A
B
PAD
Y
D0
A Y
B
TDO0
A Y
B
PAD
B
IOG12
PAD
MSEL2
D7
TDO7
Bus
Holder
Bus
Holder
S
Y
D0
TDO0
PMT_IO
9.6.5
S
A Y
AOUT
S
A
B
PAD
DA811
S
PAD
Y
A
B
TDO7
A
B
PMT for a Single Differential Amplifier
Figure 9–12 shows the PMT implementation for a single differential amplifier.
The MegaModule’s analog input signals (INP and INM) pass directly through
analog I/O (IOG12) buffers into the differential amplifier. The MegaModule’s
analog output signal (AOUT) passes directly from the differential amplifier to
an analog I/O (IOG12) buffer.
9-18
Design for Testability
PMT for Analog MegaModules
All remaining MegaModule TEST_INPUT signal connections are passed
through an input buffer to the B terminal of the MegaModule’s test collar
multiplexers. The MegaModule’s test collar multiplexers select the core logic
in or the TEST_INPUT signals, depending on the PMT_IO test signal.
Figure 9–12. PMT for a Single Differential Amplifier
Core Logic
DA811
S
A Y
B
IOG12
AOUT
PAD
MSEL1
S
S
PAD
A Y
B
D7
S
PAD
A
B
Y
A Y
B
TDO0
A Y
B
PAD
B
IOG12
PAD
MSEL2
D7
TDO7
Bus
Holder
Bus
Holder
S
PMT_IO
S
A Y
AOUT
S
A
B
PAD
DA811
S
PAD
D0
Y
A
B
TDO7
Y
D0
TDO0
A
B
Parallel Module Test
9-19
PMT for Analog MegaModules
9.6.6
PMT for Multiple Differential Amplifiers
If the device has multiple differential amplifiers, busing can be used. All
TEST_ENABLE inputs can be bused together. All TEST_INPUT inputs can
be bused together.
Figure 9–13 is an example of PMT for multiple differential amplifiers.
Figure 9–13. PMT for Multiple Differential Amplifiers
Core Logic
DA811
S
A Y
B
IOG12
AOUT
PAD
MSEL1
S
S
A Y
B
PAD
D7
S
A
B
PAD
Y
D0
A Y
B
TDO0
A Y
B
9-20
Design for Testability
PAD
B
IOG12
MSEL2
D7
TDO7
Bus
Holder
Bus
Holder
S
PMT_IO
S
A Y
AOUT
S
A
B
PAD
DA811
S
PAD
Y
A
B
TDO7
Y
D0
TDO0
A
B
PAD
In-System Use
9.7
In-System Use
The multiplexed PMT implementation passes all MegaModule test signals
through I/O buffers. At-speed operation of these MegaModules through direct
access is limited only by the MegaModule’s capabilities and the performance
of the hookup. For this reason, multiplexed PMT ports can be appropriate for
in-system functions such as preload or status checks.
Parallel Module Test
9-21
In-System Use
9-22
Design for Testability
Chapter 10
Parametric Measurements
This chapter presents dc parametric measurements. Parametric
measurements validate conformance to the electrical data sheet.
Topic
Page
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10–2
Input Threshold Voltage Levels Using a Clocked NAND Tree
(VIH_VIL TDL Type) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10–4
Output Voltage Levels (DC_PARA TDL Type) . . . . . . . . . . . . . . . 10–10
Three-State High-Impedance Measurements
(DC_PARA TDL Type) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10–11
Input Current Measurements (DC_PARA TDL Type) . . . . . . . . . 10–12
Quiescent Drain Supply Current (IDDQ TDL Type) . . . . . . . . . . 10–13
10-1
Overview
10.1
Overview
Parametric testing ensures conformance to the electrical data sheet. It
requires functional test patterns to be developed for parametric testing.
Parametric test patterns must be simulated to check for accuracy and for
circuit hazards such as bus contention. If the circuit has IEEE Standard
1149.1 boundary-scan architecture, the boundary-scan feature should be
used to facilitate input threshold, input leakage current, and output voltage
level measurements.
Most parametric testing pattern sets are assigned the DC_PARA TDL type.
The DC_PARA pattern set should provide 100 percent toggle of all I/Os. This
means that it drives all outputs to a logic low and a logic high. Bidirectional
and 3-state outputs are driven to the high-impedance state. It also drives all
inputs to a logic low and a logic high.
Parametric testing is completed with the dc current leakage pattern set that
is assigned the DC_PARA TDL type and the optional input threshold voltage
pattern set that is assigned the VIH_VIL TDL type.
The table below gives the required TDL states for the various signal types.
10-2
Design for Testability
Overview
Table 10–1. Toggle States
Signal Type
Required TDL States
Input with no pullup/pulldown
{L H}
Input with pullup
{L H | L T}
Input with pulldown
{L H | F H}
Negative (101) clocks
{C | H}
Positive (010) clocks
{C | L}
Push-pull output including ECL and PECL
{0 1N1}
3-state output with no pullup/pulldown
{0 1 Z}
3-state output with pullup
{0 1 Z | 0 1 P}
3-state output with pulldown
{0 1 Z | 0 1 N}
N-channel open drain output with no pullup/pulldown
{0 Z}
N-channel open drain with pullup
{0 Z | 0 P}
N-channel open drain, BTL/CTL/GTL
{01 | 0P}
Bidi (3-state output) with no pullup/pulldown
{0 1 L H}
Bidi (3-state output) with pullup
{ 0 1 L H | 0 1 L T}
Bidi (3-state output) with pulldown
{0 1 L H | 0 1 F H}
Bidi (N-channel open drain) with no pullup/pulldown
{0 L H}
Bidi (N-channel open drain) with pullup
{0 L H | 0 L T}
Bidi (BTL/CTL/GTL)
{0 L H}
Bidi (CML/ECL/PECL) with no pullup/pulldown
{0 1 H L | N1HL}
Parametric Measurements
10-3
Input Threshold Voltage Levels Using a Clocked NAND Tree (VIH_VIL TDL Type)
10.2 Input Threshold Voltage Levels Using a Clocked NAND Tree (VIH_VIL
TDL Type)
VIH_VIL TDLs are optional.
Circuits that implement boundary scan can be used to measure VIH and VIL.
The SAMPLE/PRELOAD and EXTEST instructions can be used to capture
the input logic level. The capture is scanned out for comparison to expected
values. Three test patterns are required. They are a safe circuit initialization
pattern, an all-inputs-at-VIL pattern (inputs include bidirectionals), and an allinputs-at-VIH pattern. For more information, see Chapter 13, IEEE Standard
1149.1-Based dc Parametric Testing.
Circuits that are not IEEE Standard 1149.1-compliant need threshold circuitry
to be added. Figure 10–1 shows the recommended circuitry commonly
referred to as a clocked NAND tree. This approach requires the addition of a
2-input NAND gate to every input pin as well as CLK and VIH_VIL OUT pins.
The NAND tree provides a purely combinatorial path from all inputs to a
single VIH_VIL OUT through a flip-flop. Do not use a bidirectional buffer for
the VIH_VIL OUT. The first NAND gate in the tree has one input connected
to the high terminal of a tie-off cell.
The flip-flop at the end of the NAND tree serves to break up a positive
feedback loop between an input buffer and the NAND tree output. All the input
buffers are driven to VIHmin and VILmax during VIH/VIL testing of the silicon.
When the NAND tree output switches, it causes some power bus noise and
some input threshold voltage shifting. Sometimes this threshold shifting is
sufficient to cause an input buffer to output the opposite state. The input buffer
may cause the NAND tree to switch again, completing the positive feedback
loop. The positivw feedback loop can also exist between asynchronous inputs
and outputs. for this reason, TI recommends that you exclude clocks, resets,
presets, and other asynchronous inputs from the NAND-tree circuitry.
10-4
Design for Testability
Input Threshold Voltage Levels Using a Clocked NAND Tree (VIH_VIL TDL Type)
Figure 10–1. Clocked NAND Tree Circuit (Dedicated Control Pins)
Hi
Tie-Off
Lo
IN1
To Functional Logic
IN2
To Functional Logic
IN3
To Functional Logic
IN4
To Functional Logic
•••
INM-1
To Functional Logic
INM
To Functional Logic
DTN12
D
Q
CLK
To Functional Logic
(Dedicated)
PAD
(Dedicated)
VIH_VIL_TEST_OUT
Parametric Measurements
10-5
Input Threshold Voltage Levels Using a Clocked NAND Tree (VIH_VIL TDL Type)
The test patterns are specific. The first pattern consists of VIH threshold
voltages on all inputs. The threshold voltages are then applied in accordance
with Table 10–2. A circuit containing M number of input pins needs 2(M+1)
test patterns to test both VIH and VIL thresholds.
Table 10–2. VIL/VIH Test Patterns (Dedicated Control Pins)
Inputs
VIH_VIL OUT
CLK
IN1
IN2
...
INM-1
INM
M=EVEN
M=ODD
=
1
1
...
1
1
1
0
=
0
1
...
1
1
0
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
0
0
...
1
1
1
1
=
0
0
...
0
1
0
0
=
0
0
...
0
0
1
1
=
0
0
...
0
1
0
0
=
0
0
...
1
1
1
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
=
0
1
...
1
1
0
1
=
1
1
...
1
1
1
0
On designs that have a bidirectional bus, running the normal NAND tree
patterns may cause bus conflict conditions. This problem can be resolved by
placing the TTL or CMOS bidirectional drivers in the high-impedance mode
with a HI-Z signal. For ECL bidirectional pins, the Hi-Z signal puts the output
driver in the cutoff mode. See Figure 10–2 for an example.
For designs that do not have extra pins available for CLK and VIH_VIL OUT,
these signals can be multiplexed with other signal pins. See Figure 10–3 for
an example. The test patterns for the example in Figure 10–3 must be
10-6
Design for Testability
Input Threshold Voltage Levels Using a Clocked NAND Tree (VIH_VIL TDL Type)
modified and are shown in Table 10–3. Test pattern generation is simplified if
CLK1 is placed on the input whose NAND gate is connected to the tie-off cell.
The placement of CLK2 is arbitrary.
Figure 10–2. CMOS ASIC NAND Tree Configurations
From NAND Tree or high output
of a tie-off macro(TO010)
Input Types
PAD
To Functional Logic
PAD
To Functional Logic
VREF
PAD
To Functional Logic
PAD
From Functional Logic
PAD
From Functional Logic
To Functional Logic
From Functional Logic
PAD
From Functional Logic
VREF
To Functional Logic
•••
To NAND Tree
HI-Z (From the GTAP)
Parametric Measurements
10-7
Input Threshold Voltage Levels Using a Clocked NAND Tree (VIH_VIL TDL Type)
Figure 10–3. Clocked NAND Tree Circuit (Shared Control Pins)
Hi
Tie-Off
Lo
IN1
(Shared CLK1)
To Functional Logic
MU111
S
A
B
Y
IN2
To Functional Logic
IN3
To Functional Logic
IN4
To Functional Logic
•••
To Functional Logic
INM-1
MU111
S
INM
(Shared CLK2)
VIL_VIH Clock
Select (GTAP)
VIL_VIH
Enable (GTAP)
From Functional
Logic
From Functional
Logic
10-8
Design for Testability
A
B
To Functional Logic
Y
DTN12
MU111
D
Q
S
A
B
Y
MU111
S
A
B
Y
Shared
PAD VIH_VIL_Test_OUT
Input Threshold Voltage Levels Using a Clocked NAND Tree (VIH_VIL TDL Type)
Table 10–3. VIH_VIL Test Patterns (Shared Control Pins)
Inputs
VIL_VIH
Clock Select
VIH_VIL OUT
CLK1
IN1
IN2
IN3
...
INM-1
CLK2
INM
M=EVEN
M=ODD
L
=
H
H
...
H
H
0
1
L
=
L
H
...
H
H
1
0
L
=
L
L
...
H
H
0
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
L
=
L
L
...
L
H
0
0
L
=
L
L
...
L
L
1
1
H
L
L
L
...
H
=
0
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
H
L
L
H
...
H
=
0
1
H
L
H
H
...
H
=
1
0
H
H
H
H
...
H
=
0
1
Parametric Measurements
10-9
Output Voltage Levels (DC_PARA TDL Type)
10.3
Output Voltage Levels (DC_PARA TDL Type)
Circuits that implement boundary scan can be used to test output logic levels.
The IEEE Standard 1149.1 instructions used are SAMPLE/PRELOAD and
EXTEST. Three test patterns are required. They are a safe circuit initialization
pattern, an outputs-at-VOL pattern, and an outputs-at-VOH pattern (see
Chapter 13, IEEE Standard 1149.1-Based dc Parametric Testing ).
If boundary-scan architecture is not used, the VOL/VOH measurement is
made from a dc parametric pattern set that drives all outputs to a logic low
and a logic high. Be sure to simulate these parametric patterns to verify that
all outputs are driven high and low and to avoid circuit hazards such as bus
contention.
10-10
Design for Testability
Three-State High-Impedance Measurements (DC_PARA TDL Type)
10.4
Three-State High-Impedance Measurements (DC_PARA TDL Type)
Circuits that implement boundary-scan can be used to test 3-state highimpedance outputs. The IEEE Standard 1149.1 instructions used are
SAMPLE/PRELOAD and EXTEST. Two test patterns are required. They are
a safe circuit initialization pattern and an all-three-state-outputs-disabled
pattern (see Chapter 13, IEEE Standard 1149.1-Based dc Parametric
Testing ).
The same safe circuit initialization pattern set can be used for all input and
output parametric measurements using boundary scan.
If boundary scan is not used, the high-impedance measurement is made from
a functional pattern set that disables all outputs. Be sure to simulate these
patterns to verify that all outputs are disabled and to avoid circuit hazards
such as bus contention.
When pullups or pulldowns are used on your outputs, you will need to supply
test patterns to both disable and enable them while the output is highimpedance. Leakage measurements are made when the pullup or pulldown
is disabled. DC through current measurements are made when the pullup or
pulldown is enabled.
Parametric Measurements
10-11
Input Current Measurements (DC_PARA TDL Type)
10.5
Input Current Measurements (DC_PARA TDL Type)
Circuits that implement boundary scan can be used to test input current. The
pattern set must force all inputs to logic 1 and logic 0. Be sure to simulate this
pattern set to verify that all inputs are exercised high and low, and to avoid
circuit hazards such as bus contention.
If boundary scan is not used, the input current measurements are made from
a functional pattern set. The pattern set must force all inputs to logic 1 and
logic 0. Be sure to simulate this pattern set to verify that all inputs are
exercised high and low, and to avoid circuit hazards such as bus contention.
When pullups or pulldowns are used on your inputs, you will need to supply
test patterns to both disable and enable them. Leakage measurements are
made when the pullup or pulldown is disabled. DC through current
measurements are made when the pullup or pulldown is disabled.
10-12
Design for Testability
Quiescent Drain Supply Current (IDDQ TDL Type)
10.6
Quiescent Drain Supply Current (IDDQ TDL Type)
The classical stuck-at fault model has been quite successful in detecting
shorts and opens. It has been pointed out that the stuck-at model does not
represent some types of CMOS faults, most notably threshold drifts and
surface contamination. Quiescent drain supply current (IDDQ) testing has
proved useful in supplementing stuck-at testing. Excessive CMOS leakage
indicates either an existing logical fault or a marginal device that is likely to
fail.
Test conditions for IDDQ must turn off all circuits that produce dc current in the
static state and are assigned the IDDQ TDL type. The circuit design and test
pattern must eliminate the following sources of dc current.
10.6.1 Initialize the ASIC to a Sustainable Logic State
For IDDQ testing, the tester pauses at the designated test pattern and
measures the power pin current. The pause can last several hundred
milliseconds for a production test to several minutes during a debug process.
For this reason, the designated IDDQ test vector must permit an indefinite
pause without damage to the device and maintain the ASIC device’s logic
initialization.
10.6.2 Eliminate dc Through-Current That Interferes With IDDQ Testing
Disabling the dc through current makes it possible to detect abnormally high
current drawn by CMOS faults. Observe the following guidelines to disable dc
through-current:
❏
Some macros have a testability pin to disable the dc through-current.
Pullups, pulldowns, LVDS buffers, bias generators,and oscillators have
the PWRDN pin. Drive the PWRDN signal to disable the dc through
current for IDDQ testing.
❏
Some macros, such as ECL I/O buffers, cannot disable their dc throughcurrent, but are isolated by a power pin independent of the core logic’s
power pin. This allows IDDQ measurements to be made on the core logic.
❏
Floating internal nodes, floating I/O inputs, and internal bus contention
cause dc through-current and must be avoided.
Parametric Measurements
10-13
Quiescent Drain Supply Current (IDDQ TDL Type)
❏
Non-terminated bidirectional buffers (e.g. TTL, PCI, CMOS) must not be
masked during an IDDQ test. The tester is disconnected from the pin when
an output TDL state (including masks) is specified at an IDDQ test pattern.
When the is physically in the high-impedance state, the pin floats and the
input buffer draws dc through current.
10.6.3 Identify the IDDQ Test Locations in the TDL
Identify test locations by placing an ASIC_TEST IDDQ statement after each
IDDQ test vector. Identify any TDL pattern set containing an IDDQ test with the
IDDQ pattern set type.
10-14
Design for Testability
Chapter 11
Automatic Test Pattern Generation
Automatic test pattern generation (ATPG) techniques are increasingly being
used to create high-fault-coverage test patterns.
Topic
Page
Introduction to Automatic Test Pattern Generation . . . . . . . . . . 11–2
Path Sensitization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11–5
Full-Scan Designs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11–6
Partial-Scan Designs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11–7
Testing and Debugging Considerations . . . . . . . . . . . . . . . . . . . 11–8
Common ATPG Constraints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11–9
Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11–10
11-1
Introduction to Automatic Test Pattern Generation
11.1
Introduction to Automatic Test Pattern Generation
This chapter discusses an increasingly popular test methodology called
Automatic Test Pattern Generation (ATPG). It is the intent of this discussion
to provide a practical overview of today’s circuit environment. Three ATPG
approaches for sequential circuits (full scan, partial scan, and nonscan) are
discussed. Important testing and debugging implications of using the ATPG
approach are also presented.
The circuit design environment has evolved dramatically over the past few
years, providing computing power and software to aid in almost every phase
of the design process. Schematic capture, simulation, test extraction, and
layout represent the essential software programs for a complete design
system. Semiconductor process technology has kept pace, permitting
implementation of extremely complex logic systems on a single chip. This
has resulted in an increase in the difficulty of chip testing.
Much of the added testing difficulty is due to higher gate density. Packing
more logic onto one circuit greatly increases the gate-to-I/O ratio and
decreases the accessibility of that logic. Allowing a reasonable number of I/
O signals to be dedicated for testing can ease the testing process
considerably. These test signals can be used to add controllability or
observability to the circuit in a variety of ways. For many designs, setting
aside the desired number of dedicated test pins is not possible due to pinout
constraints. In spite of these obstacles, a complete and efficient test program
must be generated.
Most often, designers specify a functional simulation, and the test program is
automatically extracted from the functional simulation results. Fault grading
tools allow you to grade the test program by calculating a fault coverage
percentage. You can then add to the test program to increase the fault
coverage to an acceptable level.
An integrated design environment begins with circuit design entry (as shown
in Figure 11–1) and proceeds with electrical rules checking and simulation.
During the design process, it is often necessary to modify the circuit design
to correct errors and include enhancements. Once the design has been
stabilized, the process of test generation must be accomplished. It is
important for testing considerations to be addressed early in the design
phase so that test generation becomes a task of implementing the predefined
testing plan. You should decide on a target percentage for fault coverage as
soon as possible, because a high target percentage may require the adoption
of certain circuit design methods.
11-2
Design for Testability
Introduction to Automatic Test Pattern Generation
Figure 11–1. Typical Design Flow
Circuit Design Entry
Electrical Rules
Checking
Simulation
Test Generation
Fault Simulation
Layout
Fabrication
It is possible that, during the ATPG phase, the need for additional test points
to achieve the target percentage becomes apparent. (See Chapter , Ad Hoc
Testability Practices, and Chapter 6, Structured Testability Practices, for
approaches to designing for testability.) If this is the case, the netlist must be
modified and resimulated. It is important, in terms of efficiency and
effectiveness, that the ATPG software be integrated into the design
environment. ATPG tools require the circuit description at gate level, all circuit
timing information, any pregenerated functional test patterns and any userspecified parameters. The software uses this information to follow a flow
similar to that shown in Figure 11–2.
Automatic Test Pattern Generation
11-3
Introduction to Automatic Test Pattern Generation
Figure 11–2. Typical ATPG Flow
Check Circuit for Adherence
to Any Scan Design Rules
Imposed by ATPG Tool
Fault Grade Pregenerated
Functional Test Patterns
Select an Undetected Fault
Generate Test Patterns to
Detect Fault
Fault Simulation
Eliminate Additionally
Detected Faults from
Consideration
In this flow, the first step is to check the circuit for adherence to any designfor-testability rules imposed by the ATPG tool. Fault simulation is then
performed with the optional user-generated functional patterns. All faults
detected by these patterns are tagged and eliminated from the ATPG
process. Any remaining undetected faults are passed to the ATPG algorithm
where tests are generated for these faults.
Fault simulation is rerun to check the effects of generating the input patterns
necessary to check the faults under consideration, and to identify any
previously undetected faults that may have been detected by this pattern.
Iteration of this process continues until the desired fault coverage is achieved.
Fault simulation, as an intermediate step, checks the targeted fault as well as
all other undetected faults, thus reducing the number of ATPG iterations.
11-4
Design for Testability
Path Sensitization
11.2
Path Sensitization
Test pattern generation programs use a variety of methods to achieve
essentially the same test generation capability. The definition of a good test
for a fault is an input combination that produces an incorrect output when the
fault under consideration is present in the circuit. Thus, the presence of the
fault can be observed at the outputs. Path sensitization is one such method
of generating a test for a fault. The general procedure is:
1) Select a fault (such as node stuck-at-one).
2) Assign the faulty wire a value opposite to the fault condition (such as ode
stuck-at-zero). This allows sensitization for the expected signal.
3) Choose a path from the fault to a circuit output.
4) Sensitize this path by assigning logic values to gate inputs along the path
such that the signal is passed to the circuit output.
5) Execute the test to detect the signal by determining the network inputs
that produce the desired values on gate inputs along the sensitized path.
Some variations of this path sensitization method are used in commercial
ATPG programs. All are effective methods for generating tests for faults in
most combinatorial circuitry (without reconvergent fanout). However, few
tools are effective for ATPG of sequential circuits. This has led to the
development of a set of design rules to simplify test generation in sequential
circuits. Level-sensitive scan design (LSSD) is one such design methodology
that imposes design restrictions that allow the circuit to be forced into a test
mode in which the ATPG methods above can be used to generate tests for
faults.
Another approach is random vector generation. This method has
straightforward applications for some combinatorial circuitry but has not been
extended effectively to sequential circuitry. Certain combinatorial circuits lend
themselves nicely to this approach while others do not.
Current ATPG tools are unable to achieve good results on complex designs
without DFT features. Most of the commercial, general-purpose ATPG tools
use scan techniques. Scan techniques fall into two broad categories: full scan
and partial scan.
Automatic Test Pattern Generation
11-5
Full-Scan Designs
11.3
Full-Scan Designs
By far the most popular ATPG methodology uses a full-scan approach. This
calls for rigid design rules to be followed that allow the circuit to be placed in
a test mode in which all logic storage elements are connected as shift
registers, breaking up the combinatorial circuitry. When this method is used,
the circuit is placed in the test mode and a test pattern is shifted in, thereby
defining all internal storage states. The circuit is then taken out of the test
mode and operated for a known number of system clock cycles. The circuit is
again placed in the test mode and the internal storage states are shifted out
for comparison to an ATPG-generated signature. It is argued that full-scan
designs are both easily tested and more likely to be correct the first time.
Some ATPG tools work only on full-scan designs.
11-6
Design for Testability
Partial-Scan Designs
11.4
Partial-Scan Designs
Partial scan is a technique where only some of the logic storage elements
(those in the most difficult to test areas) are made scannable. This approach
has fewer design restrictions. Some ATPG tools support partial scan and they
can also be used on full-scan designs. Partial-scan ATPG tools can help you
determine where scan elements are required. Because such modifications
are not acceptable in every design, it is essential that these tools are used by
you, the designer, and not by the ASIC vendor.
Automatic Test Pattern Generation
11-7
Testing and Debugging Considerations
11.5
Testing and Debugging Considerations
Several types of problems can cause a semiconductor circuit to fail. These
include logic design and layout errors as well as mask and wafer fabrication
defects. When performing test pattern generation, you must first determine
the strategy of testing for all possible problems.
It is very important to remember that ATPG patterns should only be used to
test for random faults relating to the manufacturing process. Although ATPG
patterns may be an efficient tool for indicating the presence of a defect, they
generally provide little information relative to the nature and location of the
defect. Consequently, ATPG patterns alone are seldom useful if you are
involved in the debugging process. Most ATPG packages provide a crossreference listing that shows which faults are detected in each vector. This
information may be of little use, however, because many faults often are
detected in each vector and isolating the specific fault may be impossible.
A straightforward method of avoiding debugging and pattern-length problems
is to begin the test program with a thorough functional test. Most ATPG
systems accept manually generated pattern inputs. In this way, a fault grade
of the functional patterns can be done before proceeding with automatic test
pattern generation. ATPG patterns can then be added to increase the fault
coverage to an acceptable level.
11-8
Design for Testability
Common ATPG Constraints
11.6
Common ATPG Constraints
The following constraints are common to most ATPG tools.
❏
All clocks must be controlled externally (no gated or logic-generated
clocks).
❏
No combinatorial-feedback loops
❏
No asynchronous timing
❏
Scan-compatible sequential elements are used.
Automatic Test Pattern Generation
11-9
Summary
11.7
Summary
When embarking on an ATPG methodology, you must consider many aspects
of the total design environment, such as:
❏
Integration of the ATPG tool into the design environment
❏
Adherence to circuit design rules pertaining to the ATPG tool
❏
Maintaining a functional test generation plan for debugging and critical
path testing
Consideration of all these items before adopting any particular ATPG
implementation should minimize any problems that might occur later.
11-10
Design for Testability
Chapter 12
Test Pattern Generation
This chapter discusses test pattern generation. Test patterns must operate on
automated test equipment (ATE).
Topic
Page
Introduction to Testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12–2
Test Pattern Creation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12–6
TDL Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12–13
12-1
Introduction to Testing
12.1
Introduction to Testing
A logic truth table is used to verify the logic behavior of an integrated circuit
and thereby check for the presence of manufacturing defects. This truth table
is referred to as a test pattern, and a test vector is defined as a line in the truth
table.
Logic simulators are used to explore the Boolean and timing responses of a
circuit by applying a user-defined set of input stimuli. If you have done a good
job, the set of input stimuli can be used to control and observe the behavior
of all nodes in the circuit.
Automated test equipment (ATE) used to screen integrated circuits does not
have the same features as the logic simulator. Access to internal nodes is not
possible, and propagation delays need to be measured from inputs to outputs
of the device. Testing a chip is performed by applying binary patterns (input
vectors) to stimulate the logic inputs and then comparing the output response
to the values predicted by simulation.
In general, the phase relationship and sequence of input stimuli applied to an
integrated circuit to test the functionality and performance of the device are
somewhat different than the simulation patterns used to verify the logic
design. These differences are due mostly to the inherent characteristics of
testing equipment used to evaluate logic devices. For this reason, test
patterns must be simulated using conditions consistent with ATE capabilities.
ATEs are synchronous systems. Described simply, an ATE operates in a
periodic fashion. Input signals change at designated points within the test
period. Output signals are strobed at designated points in the period. Figure
0-1 is a diagram of the phase relationship of input and output data with
respect to the test period for a sample test pattern. The TI test utilities
assume a data input, a clock, then a strobe for the test signal sequence. All
test period timing is referenced to the beginning of the period (to).
12-2
Design for Testability
Introduction to Testing
Figure 12–1. Synchronous Pattern for Use During Functional Test
to
to
to
to
to
to
Data
Input
Primary
Clock
Output
Strobe
Test Period
Each vector applied to the device under test (DUT) is stored in the ATE
pattern memory. If the number of test vectors exceeds the ATE pattern
memory capacity, two or more memory reloads from disk would be required,
greatly increasing the test time. Minimizing the number of test vectors is
desirable not only to reduce the test run time, but also to reduce simulation
and fault grading times.
The number of primary clocks and strobe times that can be applied to the
DUT is a function of the number of timing generators available in the ATE. By
programming these timing generators, you can select multiple clocks or
strobe timing relationships with respect to the test period.
Figure 12–2 shows a simplified block diagram of an ATE.
Test Pattern Generation
12-3
Introduction to Testing
Figure 12–2. ATE Block Diagram
Data Control
Structures
CC
OO
Output
LLIIIIIUU
KKNNNNNTT Pattern
Data
121234512
SETR P := ’CCHHLLHAA’;
SETR P := ’CCLHLHL11’;
Strobe
SETR P := ’CCHLHHH1Z’; Enable
SETR P := ’CCHHLLH10’; Timing
Test Patterns
(TDL Data)
CLK1
CLK2
IN1
IN3
IN4
IN2
OUT2
Input and Clock
Pattern Data
OUT1
Input Timing Data
IN5
Logic
Control
DUT
Test Data
Compared Pass
-1
The minimum duration of the test period varies from system to system and
determines the frequency range at which a device can be tested. Typically,
however, there are other constraints that require the testing frequency to be
much lower than the capability of the tester.
A major factor influencing testing is called period slip. In some cases, the
exact time in which the output signal becomes valid is not critical to the
system operation. It is very important to the ATE. Testing systems compare
the output states to the expected responses on a period-by-period basis by
activating strobe signals (Figure 12–1 and Figure 12–2) which, in turn,
enable a set of comparators connected to the output channels. If output
responses slip from one test period to the next, the device fails even though
it may be fully functional at the system level (see Figure 12–3). In order to
minimize this problem, functionality of devices is verified at a relatively low
12-4
Design for Testability
Introduction to Testing
frequency. (High-frequency testing—called at-speed —can be performed if
care is taken to mask the strobe for the slipped periods.) The placement of
output strobes is described in a later section.
Figure 12–3. Tester Period Slip
Based on Expecting
a High Logic Output
Pass
Output
Signal at
Min Delay
Output
Signal at
Max Delay
Fail
Strobe
Test Period N
Test Period N+1
Properly constructed test patterns should contain input signals and expected
output responses as observed during simulation. For any circuit containing
sequential logic, test patterns consist of two parts:
1) An initialization step to set external and internal nodes, including memory
elements, from an unknown state to a known state by exercising the
device clock, data, reset, or scan pins.
2) The actual test vectors used to stimulate input and output pins.
If a device contains internal 3-state buses, you must arrange the enable logic
so that the buses are always driven (not left in the high-impedance state). A
bus holder cell prevents bus floating by maintaining the last state on the bus
in a way similar to a latch. Furthermore, internal bus contention must be
avoided to ensure the device initialization is not upset by noise resulting from
the contention.
Test Pattern Generation
12-5
Test Pattern Creation
12.2
Test Pattern Creation
The TI ATE program generation software uses Test Description Language
(TDL) as an input. The TDL file contains a set of test vectors and timing
information. Test vectors define input signals and expected output signals for
a test period of fixed duration. The entire test pattern defines a set of
sequential test periods that perform a logic verification test on the device
being tested.
Before TDL can be generated, the following concepts and limitations must be
understood and applied when setting up the simulation runs for the functional
and scan tests. These concepts include input delay groups, clocks, and
output strobe groups.
12.2.1 Input Delay Group
An input delay group is a set of input signals that transition at the same time.
Every input or bidirectional signal must be assigned to one, and only one,
input delay group.
Figure 12–4 illustrates the relationship between the input delay groups and
the test period.
12-6
Design for Testability
Test Pattern Creation
Figure 12–4. Input Delay Groups
Test Period
Input Delay Group 1
Minimum Delay
Input Delay Group 2
Input Delay Group 3
Input Delay Group 4
•••
Input Delay Group N
Maximum Delay
A delay group can be assigned either a return-to-complement (clock) or a
nonreturn-to-complement signal.
Input signals other than clocks can have either zero or one transition within a
test period. All transitions of the input delay groups must occur no earlier than
the specified minimum or later than the specified maximum delay time after
the beginning of a test period. The defined timing for input delay groups may
not change within any particular test pattern set. The input signal capabilities
for each tester are specified in the design manual for the gate array family.
12.2.2 TDL Clocks
Input signals defined as clocks must be assigned to an input delay group
programmed as a return-to-zero or a return-to-one signal. A clock signal is a
complete pulse within a test period. Figure 12–5 shows two examples of input
clocks along with the corresponding TDL clock statements (CLOCK). Each
clock signal can be programmed to occur zero or one time per test period.
Test Pattern Generation
12-7
Test Pattern Creation
Figure 12–5. Definition of TDL Clocks
to
Active State
Test Period
to
Rest State
Test Period
to
(HOLD0) (HOLD1)
Delay
Width
(10 ns)
(11.5 ns)
Return-to-Zero
Leading Edge Delay
Trailing Edge Delay
CLOCK VAR = CLK1, PATTERN = 010, HOLD0 = 10 NS, HOLD1 = 11.5 NS;
to
Active State
Test Period
to
Rest State
Test Period
(HOLD1) (HOLD0)
Delay
Width
(10 ns)
(11.5 ns)
Return-to-One
Leading Edge Delay
Trailing Edge Delay
CLOCK VAR = CLK2, PATTERN = 101, HOLD0 = 11.5 NS, HOLD1 = 10 NS;
Pattern 010 defines a return-to-zero pulse. Pattern 101 defines a return-toone pulse. HOLD0 is the time the signal is held low and HOLD1 is the time
the signal is held high. Figure 12–6 depicts the minimum clock width.
12-8
Design for Testability
Test Pattern Creation
Figure 12–6. Minimum Clock Width
(a) Within a Test Period
to
to
Test Period
to
Test Period
Minimum
Clock
Pulse Width
(b) Between Test Periods
to
Test Period
to
Test Period
to
Minimum
Clock
Pulse Width
12.2.3 Output Strobe Groups
The outputs of the device are sampled at a specified time into the test period.
An output strobe group is a set of outputs that are sampled at the same time.
Figure 12–7 shows the restrictions on the output strobe timing. Output
transitions must not occur in this window. The defined delay for an output
strobe group may not change within a test pattern set. Strobe capabilities for
each tester are specified in the design manual for the gate array family.
Test Pattern Generation
12-9
Test Pattern Creation
Figure 12–7. TDL Output Strobe Placement
to
to
Test Period
Strobe
Window
Max Output Delay
Output
Min Output Delay
Strobe Offset
Strobe
12.2.4 Special Test Precautions
The product-specific design manuals present the rules to ensure proper
testing. These include:
❏
Rules to prevent contention between TTL/CMOS bidirectional buffers and
the tester
❏
Rules to prevent sampling a 3-state or bidirectional buffer before it has
had time to settle
12.2.5 ATE Loads
ATE loads must be applied to the output during simulation. Figure 12–8
illustrates ATE loads to be used.
12-10
Design for Testability
Test Pattern Creation
Figure 12–8. Simulation Tester Loads
CMOS, PCI, etc
From Output
under Test
GTL, PECL, etc
Test Point
From Output
under Test
Test Point
50 W
C = 45 pF for V-Series
= 75 pF for T3320/T3340
Termination
Voltage
12.2.6 ATE Input Slews
ATE slews must be applied to the input during simulation.
12.2.7 Performance Test Procedures
In addition to the standard low-speed functional testing, TDL can be used to
make dynamic tests.
At-Speed Testing
The capabilities for each tester are specified in the design manual for the gate
array family.
Setup and Hold Testing
Setup and hold verification is performed by proper selection of input signal
delays in FUNC_AC, SCAN_AC, and BIST_AC TDL pattern types.
Pin-to-Pin Testing
Critical timing can be verified by making pin-to-pin propagation delay
measurements.
Keywords can be inserted into the TDL ASIC_TEST statement to define a test
to be included in the test program. Propagation delay measurements have
the following capabilities:
❏
Delay from one package pin to another (input-to-output or output-tooutput). Pass or fail using max values
❏
Delay from a clock edge to an output. Pass or fail using max values
Test Pattern Generation
12-11
Test Pattern Creation
Guard-banding the limits are automatically done at test to account for tester
accuracy.
Minimum delays are not generally tested. Minimum testing is done on a
special request basis.
12-12
Design for Testability
TDL Overview
12.3
TDL Overview
All test patterns must be cycle-based with synchronous clocks.
Cycle-based means that:
❏
❏
The test vector timing is based on a fixed-length repeating cycle.
Input changes and output strobes occur at the same offset in each cycle.
Synchronous clocks means that all clock periods are multiples of the cycle
time. Example 0-1 shows three common TDL statements.
Example 12–1. Three TDL Statements
TDL_VERSION:= “ASIC_TDL_91
ASIC_TITLE = ”LIBRARY_TYPE
CUSTOMER
TI_PART_NUMBER
PATTERN_SET_NAME
PATTERN_SET_TYPE
REVISION
DATE
4.3”;
= TsC4000,
= Ardee,
= f123456,
= tdl0,
= FUNC, iddq,
= 1.00,
= 9/27/96”;
CONNECT P, VAR=(IN[1],CLK,OUT[1]), BIDI[1]),
DEFPIN=(IN2, IN, INOUT);
PERIOD = 200NS;
DELAY VAR = (IN[1], BIDI[1], OFFSET = 20NS;
CLOCK VAR=CLK, HOLD0 = 35NS, HOLD1 = 25NS, PATTERN= 010;
STROBE VAR = (OUT[1], BIDI[1]), OFFSET = 190NS;
ASIC_BIDI_CTRL = ”enables_net, TYPE = CONTROL, POLARITY=H”
VAR = (BIDI[1]);
THRU_CURRENT = ”NET enablez_net, OFF_WHEN=H” VAR=(IN[1]);
THRU_CURRENT = ”DATA=UNKNOWN”, VAR= (IN[1]);
(*$ end of header and timing section, start of pattern
data section *)
SETR P:=T’LC0M’; (*$ vector 0 *)
SETR P:=T’HC10’; (*$ vector 1 *)
THRU_CURRENT = ”DATA = OFF”, VAR = (IN[1]);
ASIC_TEST = ”IDDQ”;
ASIC_TEST = ”PROP FROM = CLK, CLKEDGE = LEADING,
TO = OUT[1], MAX = 50NS, REJECT = NO”;
END;
TDL_VERSION refers to the TDL specification version you have used.
The PATTERN_SET_NAME must begin with an alphabetic character and not
exceed eight characters in length.
Test Pattern Generation
12-13
TDL Overview
The PATTERN_SET_TYPE field identifies the TDL’s function(s). The
CONNECT statement lists all the signal names and the order in which they
appear in the SETR statements.
The PERIOD, DELAY, CLOCK, and STROBE statements provide the timing
data. The SETR statement defines the logic state data. For logic state
definitions, refer to Table 0-1.
The ASIC_BIDI_CTRL statement documents the bidirectional control signal
information for the TDL2simulator tools. This statement causes the
TDL2simulator tools to automatically trace on the internal net that determines
the direction for the named bidirectional I/O signals.
The THRU_CURRENT statement documents whether the bond pad dc
through current for an I/O is on, off, or unknown. This statement is required
for DC_PARA and IDDQ TDLs and is commonly associated with I/Os that are
connected to pullup or pulldown macros.
The IDDQ statement specifies the test vector used to measure the quiescent
power pin current. The PROP statement measures the time difference
between a transition on the FROM signal to a transition on the TO signal.
Place an ASIC_TEST statement after the SETR statement that facilitates the
test.
Figure 12–9 shows the corresponding waveform representation of the
sample TDL.
12-14
Design for Testability
TDL Overview
Figure 12–9. Waveform Representation of the Sample TDL
t0
t0
H
Offset = 20 ns
IN[1]
t0
Test Period 1 = 200 ns
L
Offset = 35 ns
C
CLK
Pulse Width = 25 ns
0
OUT[1]
1
OUT[1]
STROBE
Strobe Offset = 190 ns
Table 12–1. Commonly Used TDL Logic State Characters
Character
Direction
Logic State (Tester Perspective)
L
Input
Drive low
H
Input
Drive high
C
Input
Drive pulse
Y
Input
Don’t care
0
Output
Expect low
1
Output
Expect high
Z
Output
Expect high-impedance state
M
Outout
Mask (don’t care)
12.3.1 TDL Example
A portion of a TDL file containing one initialization vector and four test vectors
is shown in Example 12–2. The patterns are defined by the character strings
Test Pattern Generation
12-15
TDL Overview
enclosed in single quotes. There are seven inputs (CLOCK, IN1-1N6) and
four outputs (OUT1-OUT4).
Example 12–2. TDL File Example
(*$
(*$
(*$
(*$
(*$
SETR
SETR
SETR
SETR
SETR
C
*)
L
OOOO*)
O IIIIII UUUU*)
C NNNNNN TTTT*)
K 123456 1234*)
P:=T’L_YYYYYY_MMMM’;
P:=T’C_HHHLLL_MMMM’;
P:=T’C_HLHLHH_1100’;
P:=T’C_LHLHHL_1Z00’;
P:=T’C_LHLHHL_1011’;
Figure 0-10 shows the relationship between the set of test vectors and the
corresponding logic waveforms.
12-16
Design for Testability
TDL Overview
Figure 12–10. Relationship Between Test Vectors and Corresponding Logic Waveforms
CLOCK
IN1
IN2
IN3
IN4
IN5
IN6
OUT1
OUT2
OUT3
CLOCK
IN1
IN2
IN3
IN4
IN5
IN6
OUT1
OUT2
OUT3
OUT4
OUT4
SETR P:=T’L_Y Y Y Y Y Y_M M M M’:
SETR P:=T’C_H H H L L L_M M M M’:
SETR P:=T’C_H L H L H H_1 1 0 0’:
SETR P:=T’C_L L L H H L_1 Z 0 0’:
SETR P:=T’C_L H H L L H_1 0 1 1’:
12.3.2 Specifying Propagation Delay Measurements in TDL
Keywords can be inserted into the ASIC_TEST statement to define
propagation delay tests. The statement with keywords is placed following the
test vector for which the measurement is to be performed. Propagation delay
measurements are made with the format in Example 12–3.
Test Pattern Generation
12-17
TDL Overview
Example 12–3. TDL Used to Specify Propagation Delay Measurements
ASIC_TEST =“PROP FROM=<SIGNAL NAME>,TO=<SIGNAL NAME>
[,CLKEDGE=<CLOCK EDGE>],MAX=<VALUE>[,MIN=<VALUE>],
REJECT = <YES/NO>”;
Required keywords:
PROP
Indicates a propagation delay test is to be performed
FROM
Indicates the input signal
TO
Indicates the output signal
MAX
Indicates the maximum limit
REJECT
Indicates whether to reject a device having a measured value outside the min or max
limits. A YES value causes rejection. A NO value allows the test to be made but does
not reject devices measuring outside the limits.
Optional keywords:
CLKEDGE
Is required if the FROM signal is a clock. The two values for this parameter are
LEADING and TRAILING.
LEADING indicates the positive-going edge of a 010 clock or the negative-going edge
of a 101 clock.
TRAILING indicates the negative-going edge of a 010 clock or the positive-going edge
of a 101 clock.
MIN
Indicates minimum limits. Minimum limit testing is performed only by special request.
Keyword fields can be in any order. If the timing fields require more than one
line, each line must be terminated with a comma (,). The last line must end
with a double quote and semicolon (”;).
As shown in Example 12–4, the ASIC_TEST statement means that you
should measure the propagation delay on the preceding pattern, from pin IN1
to pin OUT1, with a maximum limit of 85 ns.
Example 12–4. Propagation Delay Measurement
(*$
O *)
(*$
ICU *)
(*$
NLT *)
(*$
1K1 *)
SETR P:T’LCO’;
12-18
Design for Testability
TDL Overview
SETR P:T’HC1’;
ASIC_TEST=“PROP FROM=IN1,TO=OUT1,MAX=85NS,
REJECT=YES”;
If the input signal is a clock, the edge must be specified. See Example 0-5 for
the specification of a clock-to-output measurement.
Example 12–5. Clock-to-Output Measurement
ASIC_TEST = “PROP FROM=CLK,TO=OUT1,MAX=55NS,
CLKEDGE=LEADING,REJECT=NO”;
12.3.3 Scan TDL
During functional testing, TDL defines conditions for all signal pins on a
device. During the serial load and unload of a scan path, the only input data
pins that are driven by changing data are the scanin pins. The only output or
bidirectional pins that are unmasked are the scanout pins. Clock pins are also
active. The functional TDL, which describes the conditions for all signal pins
in every cycle, contains a massive amount of redundant information.
TDL can describe just the nonredundant information. It minimizes the file size
and vector processing costs. Additional statements used are:
PATH
This statement defines the scanin and scanout pins for a particular scan path. A scanin
pin must be an input (IN). A scanout pin must be an output (OUT). Bidirectional pins
(INOUT) can be used for either scanin or scanout, but this is not recommended because
it requires extra circuitry.
SET
This statement is used to provide values for all pins prior to a SCAN statement. The
scan pin values in the SCAN statement take precedence over the SET statement
values. The pin values defined in the SET statement are not applied until the SCAN
statement is executed.
SCAN
The SCAN statement indicates that scanning is to be performed using the scan pin
values, described by SCAN_IN and SCAN_OUT. The number of scan cycles is
determined by the loop_count parameter.
Example 12–6 uses the previously listed TDL statements.
Example 12–6. Scan TDL Example
CONNECT P,VAR=(IN1,IN2,IN3,IN4,ACLOCK, BCLOCK,CCLOCK,
SCANIN1,SCANOUT1,OUT1,OUT2,OUT3,OUT4),
DEFPIN=(IN 8,OUT 5);
PERIOD=200NS;
STROBEVAR=(OUT1,OUT2,OUT3,OUT4,SCANOUT),OFFSET=190NS;
Test Pattern Generation
12-19
TDL Overview
DELAY CLOCK VAR=(IN1,IN2,IN3,IN4,SCANIN1),OFFSET= 5NS,
CLOCK
VAR=(ACLOCK,CLOCK),HOLD0=30NS,HOLD1=10NS,PATTERN=010;
CLOCK VAR=(BCLOCK),HOLD0=10NS,HOLD1=10NS,PATTERN=010;
PATHSCAN1,VAR=(SCANIN1,SCANOUT1),
VAR=(R1.sd,R2.sd,R3.sd,R4.sd),
CONFIG=L’TTTTT’;
SETRP := T’YYYY_LLL_YM_MMMM’;
SET P := T’HHHH_CCL_LM_MMMM’;
SCAN FOR 4,
SCAN_IN
SCAN1:= T’LHLH’;
SCAN_OUT SCAN1:= T’0111’;
END_SCAN;
Example 0-7 shows the scan vectors from Example 0-6 written in functional
TDL format. Notice how the redundant information expands the vectors.
Example 12–7. Scan Vectors in Functional TDL Format
SETR P := T’YYYY_LLL_YM_MMMM’;
SETR P := T’HHHH_CCL_L0_MMMM’;
SETR P := T’HHHH_CCL_H1_MMMM’;
SETR P := T’HHHH_CCL_L1_MMMM’;
SETR P := T’HHHH_CCL_H1_MMMM’;
12.3.4 Specifying IDDQ Measurements in TDL
Keywords can be inserted into the ASIC_TEST statement to define quiescent
power supply current measurements. The statement with keywords is placed
following the test vector for which the measurement is to be performed.
Quiescent power supply current measurements are made with the following
format.
ASIC_TEST = “IDDQ”;
ASIC_TEST = “IDDQ MIN = <value>, MAX = <value>”;
Required keyword:
IDDQ
Indicates an IDDQ test is to be performed
Optional keywords:
12-20
Design for Testability
TDL Overview
MIN
<value> specifies the minimum allowed IDDQ value. <value> follows the usual conventions
for current specifications.
MAX
<value> specifies the maximum allowed IDDQ value. <value> follows the usual conventions
for current specifications.
If no limits are included, the IDDQ defaults for the given technology type are
used.
The IDDQ ASIC_TEST statement can be inserted in multiple locations in the
TDL.
For more reference material on the test program generation, refer to the
following sources:
❏
❏
❏
Part 2 of this document, the Generic Test Access Port Application Report
Part 5 of this document, the ASIC TDL 91 Reference Guide
Part 6 of this document, the ASIC TDL 91 and Scan Designs
Reference Guide
Test Pattern Generation
12-21
TDL Overview
12-22
Design for Testability
Chapter 13
IEEE Standard 1149.1-Based dc
Parametric Testing
This chapter proposes performing ASIC dc parametric tests using IEEE
Standard 1149.1-1990. Two IEEE Standard 1149.1 configurations are
presented:
❏
❏
Standard Test Access Port
Generic Test Access Port (GTAP)
The standard test access port works on all IEEE Standard 1149.1 devices.
The GTAP configuration requires additional circuitry for improved dc
parametric test capabilities.
Topic
Page
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13–2
Boundary-Scan Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13–3
Parametric Measurements Using Boundary-Scan Architecture 13–10
Integrating Boundary-Scan Architecture and GTAP . . . . . . . . . 13–18
13-1
Introduction
13.1
Introduction
The IEEE Standard 1149.1-1990 defines a standard test access port and
boundary-scan architecture. This circuitry is primarily intended to test system
interconnect. All device I/O pins can be made observable and controllable
respectively through boundary-scan cells. The IEEE Standard 1149.1 can
independently control the device I/O pins to send/receive test signals to and
from other IEEE Standard 1149.1 devices to test the interconnect. This
capability can also be used for dc parametric testing. For example, by
applying test patterns to the input pins and observing these pins with IEEE
Standard 1149, a VIH/VIL test can be made. Also, a VOH/VOL test can be
made by driving test patterns from the output pins with IEEE Standard 1149.1
and capturing the output pin values with IC automated test equipment (ATE).
The IEEE Standard 1149.1 has limited provisions for device internal testing
as well. The boundary-scan cells on the I/O pins can also drive test patterns
into the device and capture the device’s response to the test patterns,
respectively. In addition to this capability, new capabilities can be integrated
into the boundary-scan architecture through user-defined test data registers.
Examples of test data registers are internal scan paths.
13-2
Design for Testability
Boundary-Scan Architecture
13.2
Boundary-Scan Architecture
The boundary-scan architecture (see Figure 0-1) consists of four dedicated
test pins: Test Data In (TDI), Test Data Out (TDO), Test Mode Select (TMS)
and Test Clock (TCK). An optional Test Reset (TRST) pin is permitted. The
boundary-scan register surrounds the core logic (see Figure 0-2), and all
device I/O signals must pass through a boundary-scan cell (BSC). The
boundary-scan operations are programmed through the instruction register.
Figure 13–1. IEEE Standard 1149.1 Hardware Block Diagram
Boundary-Scan Register
Device Identification Register *
TDI
Test Data Register *
MUX
TDO
Bypass Register
Instruction Register
* Note: Optional
Instruction Decode
TMS
TAP Controller
TCK
IEEE Standard 1149.1-Based dc Parametric Testing
13-3
Boundary-Scan Architecture
Figure 13–2. A Simplified View of the Boundary-Scan Register
PU/PD
SO
Input
Pin
PI
SI
PI
PO
2-State
Output
Pin
PO
SI
SO
SO
SI
PU/PD
Input
Pin
PI
PO
PO
PI
SI
SO
SO
SI
PU/PD
PU/PD
Input
Pin
PI
PO
SI
On-Chip
System
Logic
PO
PI
3-State
Output
Pin
BUF
SO
PU/PD
SI
SO
Input
Pin
PO
PI
PO
PI
SI
SO
SO
SI
PU/PD
PI
PO
PI
PO
SI
SO
SCAN
IN
SCAN
OUT
BUF
Input/
Output
Pin
A 1-bit bypass register is required to put the test circuit in a bypass mode.
Boundary-scan permits optional circuits such as a device ID register, and
user-defined test data registers. All communication with the boundary-scan
registers is serial through the TDI/TDO pins. The test access port (TAP) is a
16-state controller. The TAP is controlled via the TMS/TCK pins. Refer to the
IEEE Standard 1149.1 for a more complete description of this circuit.
13-4
Design for Testability
Boundary-Scan Architecture
13.2.1 Boundary-Scan Cell
The boundary-scan cell (BSC) is the basic element of the boundary-scan
register. Each I/O port is connected through a BSC. Thus the I/O port can be
made observable and controllable. Each BSC consists of two 2:1 multiplexers
and two flip-flops (see Figure 13–2 and Figure 13–3). All port signals must
pass through MUX2 via the signal in/signal out paths. All remaining BSC
signals come from the Test Access Port (TAP) or connect to neighboring
BSCs. REG1 is sometimes referred to as the capture flip-flop, because it is
clocked on the rising edge of TCK during the Capture-DR TAP state. REG2
is sometimes referred to as the update flip-flop, because it is clocked on the
falling edge of TCK during the Update-DR TAP state. The controls for MUX1
and MUX2 are decoded from the instruction register contents.
Figure 13–3.
Boundary-Scan Cell
MUX2
MODE
G1
SIGNAL IN
1
Y
1
SIGNAL
OUT
MUX1
SHIFT/LOAD
SCANOUT
G1
REG1
1
SCANIN
1
Y
1D
REG2
Q
C1
CLOCK A
1D
C1
Q
REG1 or REG2 may be
implemented
as latches
CLOCK B
13.2.2 Test Access Port
The TAP is the interface to the IEEE Standard 1149.1 circuitry. The TAP is a
16-state controller that uses a serial communication protocol. The TAP can
change state on each rising edge of TCK depending on the value of TMS and
the current TAP state. Figure 13–4 illustrates the 16 TAP controller states. On
power up, the TAP can be in any state. Holding TMS high and applying five
IEEE Standard 1149.1-Based dc Parametric Testing
13-5
Boundary-Scan Architecture
rising edges on TCK guarantees that the TAP is in the Test-Logic-Reset state
regardless of the original state.
The TAP controller consists of two major state groups: Data Register (DR)
and Instruction Register (IR). These two groups are functionally identical. The
IR state group handles sampling (Capture-IR), loading/unloading (Shift-IR),
and activating (Update-IR) the instruction register. The DR state group
performs the same functions but for all other registers, i.e., boundary-scan,
device ID, test data register, etc. The instruction register contents select the
specific DR register. Only during the Shift-DR and Shift-IR states are the TDI
and TDO pins used for shifting in/out register data. All shifting is done
synchronous to the TCK clock. During all other states, the TDO pin is in highimpedance mode.
13-6
Design for Testability
Boundary-Scan Architecture
Figure 13–4. TAP Controller State Diagram
1
Test-Logic-Reset
0
0
Run-Test/Idle
1
Select-DR-Scan
1
Select-IR-Scan
0
1
0
1
Capture-DR
Capture-IR
0
0
Shift-DR
Shift-IR
0
1
Exit1-DR
1
Exit1-IR
0
0
Pause-DR
Pause-IR
0
0
1
1
0
Exit2-DR
Exit2-IR
1
1
Update-DR
1
0
1
1
0
1
0
Update-IR
1
0
The value shown adjacent to each state transition in Figure 13–
4 represents the signal present at TMS at the time of a rising edge
of TCK.
IEEE Standard 1149.1-Based dc Parametric Testing
13-7
Boundary-Scan Architecture
13.2.3 Boundary-Scan Instructions
Boundary-scan instructions predefine several special instruction register
values known as public instructions. The instruction register contents are
decoded by instruction decode logic, and the appropriate data register is
connected between the TDI and TDO pins. The instruction decode logic may
also generate other control signals associated with an instruction.
An instruction is loaded by the following steps:
1) Move the TAP to the Shift-IR state.
2) Set the TDI pin to the first IR bit value.
3) Toggle TCK from low to high.
4) Repeat steps 2 and 3 for each successive IR bit.
5) Move the TAP to the Exit1-IR state.
6) Move the TAP to the Update-IR state.
Upon entering the Shift-IR state, the instruction register is automatically
connected to the TDI/TDO pins. Shifting in a new instruction actually loads
the capture portion of the instruction register. Upon entering the Update-IR
state, the next high-to-low TCK clock edge transfers the new instruction from
the capture to the update portion of the instruction register, where the new
instruction goes into effect. Until then, the old instruction is still in effect.
Two public instructions are SAMPLE/PRELOAD and EXTEST. All boundaryscan-compatible devices support these two public instructions. These
instructions are useful for dc parametric testing.
13.2.4 Boundary-Scan Instruction: SAMPLE/PRELOAD
The SAMPLE/PRELOAD instruction permits taking a snapshot of the device
I/O activity in the boundary-scan register (BSR) and shifting out the data, both
without interfering with normal device operations. This instruction also
permits preloading the BSR update flip-flops with an arbitrary value for use
by another instruction. This instruction selects the boundary-scan register to
be connected between the TDI and TDO pins.
The SAMPLE operation occurs during the Capture-DR state and the next
rising edge of TCK. All I/O data is captured in the BSR capture flip-flops from
where it is serially shifted to the TDO pin on the rising edge of TCK during the
Shift-DR states. PRELOAD data can be simultaneously shifted in with the
13-8
Design for Testability
Boundary-Scan Architecture
shift out. The PRELOAD data is loaded into the BSR update flip-flops during
the Update-DR state and the next falling edge of TCK. The binary value for
the SAMPLE/PRELOAD instruction is user-definable.
13.2.5 Boundary-Scan Instruction: EXTEST
The EXTEST instruction is designed to test external chip circuitry. The output
BSC’s update flip-flop controls the device output pins. The input pins are
observable by the input BSC’s capture flip-flops. During the Capture-DR state
and the next rising edge of TCK, all input signals are clocked into the capture
flip-flops. Captured data is shifted out, and new output data (similar to
PRELOAD data) is shifted in on the rising edge of TCK during the Shift-DR
state. The new output is loaded into the update flip-flop during the Update-DR
state and the next falling edge of TCK. The binary value for the EXTEST
instruction is all zeros.
IEEE Standard 1149.1-Based dc Parametric Testing
13-9
Parametric Measurements Using Boundary-Scan Architecture
13.3
Parametric Measurements Using Boundary-Scan Architecture
This section describes the procedure to perform dc parametric
measurements on an ASIC device with IEEE Standard 1149.1 boundaryscan architecture. The basic circuits facilitate several of these measurements
directly (i.e., VIH/VIL and VOH/VOL). Several measurements (IDDQ, IIH/IIL, and
IOZ) require the control of nonboundary-scan features (i.e., SRAM standby
mode and dc through-current cells). These controls must be provided by
some other means. Table 0-1 lists the dc parametric measurements and the
required device resources.
Table 13–1. Parametric Test Resources
Interface
Parametric Tests
TAP
BSR
VIH/VIL
✓
✓
VOH/VOL
✓
✓
SRAM
Standby
dc Through
Current
Test
Vectors
✓
✓
✓
IDDQ
IIH/IIL
✓
✓
IOZ
✓
✓
VIH/VIL and VOH/
VOL (TAP pins)
✓
Note:
✓
✓
Device initialization can require both boundary-scan and test vectors.
13.3.1 VIH/VIL Test
The VIH/VIL test comprises the following steps.
Step 1: Initialize the device for test.
1) Apply power to the device under test.
2) Initialize the TAP controller by setting TMS to a logic high and toggling
TCK with five rising clock edges.
3) Apply sufficient normal vectors to prevent device states that may harm
the device (i.e., prevent bus contention).
Step 2: Set all bidirectional pins to input mode.
13-10
Design for Testability
Parametric Measurements Using Boundary-Scan Architecture
1) Load SAMPLE/PRELOAD instruction.
2) Transition TAP through the following states:
Update-IR→Select-DR-Scan→Capture-DR→Shift-DR
3) Serially apply boundary-scan register data to the TDI pin and clock each
bit with the rising edge of TCK. The boundary-scan register data must
force all bidirectional pins to input mode.
4) Transition TAP through the following states:
Exit1-DR→Update-DR→Select-DR-Scan→Select-IR-Scan
5) Load EXTEST instruction.
Step 3: Apply a broadside VIH test pattern (all inputs high) to device.
Step 4: Capture the VIH input pin signals. Transition TAP through the
following states:
Update-IR→Select-DR-Scan→Capture-DR
Step 5: Scan out the captured VIH data.
1) Transition TAP through the following states:
Capture-DR→Shift-DR
2) Set TMS low.
3) Serially reapply boundary-scan register data to the TDI pin and clock
each bit with the rising edge of TCK. The boundary-scan register data
must force all bidirectional pins to input mode. Serially verify each value
on the TDO pin.
4) Transition TAP through the following states:
Exit1-DR→Update-DR
Step 6: Apply a broadside VIL (all inputs low) test pattern to device.
Step 7: Capture the VIL input pin signals. Transition TAP through the
following states: Update-DR→Select -DR-Scan→Capture-DR
Step 8: Scan out the captured VIL data.
1) Transition TAP through the following states:
Capture-DR→Shift-DR
2) Set TMS low.
IEEE Standard 1149.1-Based dc Parametric Testing
13-11
Parametric Measurements Using Boundary-Scan Architecture
3) Serially reapply boundary-scan register data to TDI pin and clock each
bit with the rising edge of TCK. The boundary-scan register data must
force all bidirectional pins to input mode. Serially verify each value on the
TDO pin.
4) Transition TAP through the following states:
Exit-DR→Update-DR
Step 9: For Schmitt-trigger inputs, repeat VIH test (Step 3 through Step 5).
Step 10: Reset the TAP. Transition TAP through the following states:
Update-DR→Select-DR-Scan→Select-IR-Scan→
Test-Logic-Reset
13.3.2 VOH/VOL Test
The VOH/VOL test comprises the following steps.
Step 1: Initialize the device for test.
1) Apply power to the device under test.
2) Initialize the TAP controller by setting TMS to a logic high and toggling
TCK with five rising clock edges.
3) Apply sufficient normal vectors to prevent device states that may harm
the device (i.e., prevent bus contention).
Step 2: Set all 3-state and bidirectional pins to output mode and VOH
pattern (all outputs high).
1) Load SAMPLE/PRELOAD instruction.
2) Transition TAP through the following states:
Update-IR→Select-DR-Scan→ Capture-DR→Shift-DR
3) Serially apply boundary-scan register data to the TDI pin and clock each
bit with the rising edge of TCK. The boundary-scan register data must
force all 3-state and bidirectional pins to output mode. All output pins
should have VOH values.
4) Transition TAP through the following states:
Exit1-DR→Update-DR→Select-DR-Scan→Select-IR-Scan
5) Load EXTEST instruction.
Step 3: Measure the VOH values at each output pin with the ATE.
13-12
Design for Testability
Parametric Measurements Using Boundary-Scan Architecture
Step 4: Set all 3-state and bidirectional pins to output mode and VOL pattern
(all outputs low).
1) Transition TAP through the following states:
Update-IR→Select-DR-Scan→Capture-DR→Shift-DR
2) Serially apply boundary-scan register data to the TDI pin and clock each
bit with the rising edge of TCK. The boundary-scan register data must
force all 3-state and bidirectional pins to output mode. All output pins
should have VOL values.
3) Transition TAP through the following states:
Exit1-DR→Update-DR
Step 5: Measure the VOL values at each output pin with the ATE.
Step 6: Reset the TAP. Transition TAP through the following states: UpdateDR→Select-DR-Scan→Select-IR-Scan→
Test-Logic-Reset
13.3.3 IDDQ Test
The IDDQ test comprises the following steps.
Step 1: Set ATE for an IDDQ test. All output and bidirectional pins are
unloaded.
Step 2: Initialize the device for test.
1) Apply power to the device under test.
2) Initialize the TAP controller by setting TMS to a logic high and toggling
TCK with five rising clock edges.
3) Apply sufficient normal vectors to prevent device states that may harm
the device (that is, prevent bus contention).
Step 3: Force SRAMs into standby mode by whatever means have been
provided. Usually, normal vectors are required to disable the
SRAMs.
Step 4: Apply customer-provided test vectors to device, stopping at the
vector of interest.
IEEE Standard 1149.1-Based dc Parametric Testing
13-13
Parametric Measurements Using Boundary-Scan Architecture
Step 5: Turn off through-current devices (pullups and pulldowns) by
whatever means have been provided. Sometimes, a device pin is
dedicated for turning off these through-current devices.
Step 6: :Measure IDDQ at the VCC pin.
Step 7: Repeat Step 4 through Step 6 for all vectors of interest. Care must
be taken so that the SRAMs are never turned on.
Boundary-scan instructions are not involved in the IDDQ test.
13.3.4 IIH/IIL Test
The IIH/IIL test comprises the following steps.
Step 1: Initialize the device for test.
1) Apply power to the device under test.
2) Initialize the TAP controller by setting TMS to a logic high and toggling
TCK with five rising clock edges.
3) Apply sufficient normal vectors to prevent device states that may harm
the device (i.e., prevent bus contention).
Step 2: Set all bidirectional pins to input mode.
1) Load SAMPLE/PRELOAD instruction.
2) Transition TAP through the following states:
Update-IR→Select-DR-Scan→Capture-DR→ Shift-DR
3) Serially apply boundary-scan register data to TDI pin and clock each bit
with rising edge of TCK. The boundary-scan register data must force all
bidirectional pins to input mode.
4) Transition TAP through the following states:
Exit1-DR→Update-DR→Select-DR-Scan→Select-IR-Scan
5) Load EXTEST instruction.
Step 3: Apply a broadside IIH/IIL test pattern (alternating highs and lows on
adjacent device pins) to the device. This pattern is designed to
13-14
Design for Testability
Parametric Measurements Using Boundary-Scan Architecture
detect pin-to-pin leakage. For differential input pins, apply VIH to
one input and VIL to the other.
Step 4: Turn off through-current devices (pullups and pulldowns) by
whatever means have been provided. Sometimes, a device pin is
dedicated for turning off these through-current devices.
Step 5: Measure IIH/IIL leakage current at each input pin with the ATE.
Step 6: Repeat Step 3 through Step 5 using complement of original IIH/IIL
test pattern.
Step 7: Repeat Step 3 through Step 6 but with through-current devices left
on to measure bias current.
Step 8: Reset the TAP. Transition TAP through the following states:
Update-IR→Select-DR-Scan→Select-IR-Scan→
Test-Logic-Reset
13.3.5 IOZ Test
The IOZ test comprises the following steps.
Step 1: Initialize the device for test.
1) Apply power to the device under test.
2) Initialize the TAP controller by setting TMS to a logic high and toggling
TCK with five rising clock edges.
3) Apply sufficient normal vectors to prevent device states that may harm
the device (i.e., prevent bus contention).
Step 2: Set all bidirectional pins to input mode and all 3-state output buffers
to high-impedance state.
1) Load SAMPLE/PRELOAD instruction.
2) Transition TAP through the following states:
Update-IR→Select-DR-Scan→Capture-DR→Shift-DR
3) Serially apply boundary-scan register data to TDI pin and clock each bit
with the rising edge of TCK. The boundary-scan register data must force
all bidirectional pins to output mode. All 3-state output pins should be in
high-impedance state.
IEEE Standard 1149.1-Based dc Parametric Testing
13-15
Parametric Measurements Using Boundary-Scan Architecture
4) Transition TAP through the following states:
Exit1-DR→Update-DR→Select-DR-Scan→Select-IR-Scan
5) Load EXTEST instruction.
Step 1: Turn off through-current devices (pullups and pulldowns) by
whatever means have been provided. Sometimes, a device pin is
dedicated for turning off these through-current devices.
Step 2: Measure IOZ leakage current at each 3-state output pin with the
ATE.
Step 3: Repeat Step 3 through Step 4 but with through-current devices left
on to measure pullup/pulldown current.
Step 4: Reset the TAP. Transition TAP through the following states:
Update-IR→Select-DR-Scan→Select-IR-Scan→
Test-Logic-Reset
13.3.6 VIH/VIL and VOH/VOL Test on TAP Pins
The test access port (TAP) signals consist of three input signals (TMS, TCK,
and TDI), one output signal (TDO), and one optional input signal (TRST).
Unlike all other device pins, the TAP pins are excluded from the boundaryscan register. A different approach is required for dc parametric tests on TAP
signals.
The TAP signals are tested indirectly. The input signals are manipulated to
produce a predictable and unique output signal. If the expected output
occurs, then the input must have been received correctly. All input and output
signals experience both logic highs and lows.
Step 1: Initialize the TAP controller to the Test-Logic-Reset state. Hold TMS
to a logic high while toggling TCK with five rising edges. TMS is
always loaded on the rising edge to TCK.
Step 2: Step the TAP controller to the Shift-IR state with the following TMS
sequence, 0-1-1-0-0. The TDO output should be in high-impedance
state during this sequence. The last rising edge of TCK (1) loads the
instruction register’s two least significant bits (LSBs) with 01 where
1 is the LSB (closest to TDO) and (2) enables the TDO output. The
latter event indicates entry into Shift-IR state (see Note). For this to
occur, the TMS and TCK must have successfully decoded logic
highs and logic lows. This indirectly confirms TMS and TCK VIH/VIL
capability.
13-16
Design for Testability
Parametric Measurements Using Boundary-Scan Architecture
The Shift-DR state also enables the TDO output. However, the
Shift-DR state cannot be arrived at following a TMS sequence of
0-1-1-0-0. If TMS fails VIH/VIL, then it would decode 1-1-1-1-1 or
0-0-0-0-0, neither of which could arrive at Shift-DR or Shift-IR
state.
Step 3: The TAP controller stays in Shift-IR state while TMS is held to logic
low. For the n-bit instruction register, apply n TCK clock pulses to
shift out the instruction register. The first two bits shifted out should
be a logic high followed by a logic low. These two output bits
constitute the TDO VOH/VOL test. Simultaneously, the first two bits
shifted in should be a logic high followed by a logic low.
Step 4: Apply two more TCK clocks. The next TDO values should be a logic
high followed by a logic low. These bits are a result of the first two
bits shifted in. This event indirectly confirms TDI VIH/VIL capability.
Step 5: If the optional TRSTZ signal is present, it should be held at a logic
high until now. Set TRSTZ to a logic low. The TAP controller should
be asynchronously reset from Shift-IR to Test-Logic-Reset state.
This would be detectable when TDO returns to high-impedance
state. Therefore, TRSTZ passes VIH/VIL.
IEEE Standard 1149.1-Based dc Parametric Testing
13-17
Integrating Boundary-Scan Architecture and GTAP
13.4
Integrating Boundary-Scan Architecture and GTAP
Boundary-scan architecture and TAP simplify making some dc parametric
tests (VIH/VIL and VOH/VOL). However other dc parametric tests still require
additional hardware support (IDDQ, IIH/IIL, and IOZ). This last group of tests
requires turning off through-current macros and putting SRAMs in a standby
mode that must be controlled outside boundary-scan control. There is no
standard way of controlling through-current macros and SRAMs. This section
proposes one way to integrate all dc parametric testing under a centralized
boundary-scan control.
The generic test access port (GTAP) is a TI ASIC test controller. The GTAP
is designed to ease dc parametric testing in addition to other functions. The
GTAP consists of a state-machine controller and a GTAP test register. If a
device adheres to IEEE Std 1149.1, the GTAP controller is not necessary.
The TAP controller becomes the primary test access port. The GTAP test
register can be integrated into the boundary-scan architecture as a test data
register. Refer to Figure 13–5.
13-18
Design for Testability
Integrating Boundary-Scan Architecture and GTAP
Figure 13–5. Boundary-Scan Registers and GTAP Test Register Hardware
Boundary-Scan Register
Device Identification Register *
TDI
D
Q
TP000
TP000
TP000
TP000
MUX
TDO
GTAP Test Register
Bypass Register
Instruction Register
TEST_REG
Instruction Decode
TMS
TAP Controller
Shift_DR
Run-Test/Idle
TCK
* Note: Optional
13.4.1 Boundary-Scan Private Instruction: TEST_REG
A private instruction, TEST_REG, permits access with the GTAP Test
Register. TEST_REG is a user-defined instruction. Upon loading this
instruction, the GTAP test register is connected between the TDI and TDO
pins. This instruction also partially enables the GTAP test register contents.
IEEE Standard 1149.1-Based dc Parametric Testing
13-19
Integrating Boundary-Scan Architecture and GTAP
13.4.2 GTAP Test Register
The GTAP test register consists of multiple TP000 macros connected as a
scan path. Refer to Figure 0-6. All clock signals (GTT and GST) and enable
signals (GTSTEN and GBUSENZ) are connected in parallel. The SCANOUT
signal of one TP000 is connected to the SCANIN of the next, thus forming a
scan path. The MSEL output signal is connected to a test feature associated
with that TP000. A flip-flop is required to synchronize TDI data into the GTAP
test register.
Figure 13–6. GTAP Test Register Architecture
TST_ENBL
LOW
GTT
GTT
GST
GST
TDI
D
Q
TDIQ
TCK
G
GZ
C1
GST
C2
SI
G
GTT
SO
GZ
C1
GST
C2
SI
GTT
SO
G
GZ
C1
GST
C2
SI
G
GTT
SO
GZ
C1
C2
SI
SO
TP000
TP000
TP000
TP000
MSEL1
MSEL2
MSEL3
MSELn
TDO
The TP000 macros use two-phase nonoverlapping clocks (GTT/GST). Figure
13–7 illustrates TCK timing along with the required TP000 clock timing. The
TCK is an edge-triggered clock. An edge-triggered-to-two-phase
nonoverlapping clock generator circuit is required. Figure 13–8 illustrates
one possible circuit implementation. Shift-DR is a signal representing
whether the TAP is in the Shift-DR state. TEST_REG is a signal decoded from
the instruction register decode logic. It represents when the TEST_REG
private instruction is loaded into the instruction register.
13-20
Design for Testability
Integrating Boundary-Scan Architecture and GTAP
Figure 13–7. Test Register Load Timing Diagram
TCK
TDI
A
TDIQ
B
A
C
B
D
C
D
GTT
GST
Figure 13–8. TCK-to-Master/Slave Clock Interface Circuit
TEST_REG
CK120
AN310
Shift-DR
D
Q
2-Phase
Clock
Gener.
Shift-DRQ
3-Input AND
Gate
TCK
GTT
GST
IV110
13.4.3 Test Activation Control Pin (Optional)
A device-pin, test-activation control signal facilitates efficient dc parametric
testing. This signal permits test features to be activated/deactivated easily
without the time-consuming process of scanning in new instructions. This
also simplifies test vector generation, because the test control is simplified.
Both test time and test costs are saved.
The Test Data Output (TDO) pin can be used as an external test activation
control to facilitate fast dc parametric testing (i.e., ICCQ testing). According to
IEEE Standard 1149.1-Based dc Parametric Testing
13-21
Integrating Boundary-Scan Architecture and GTAP
IEEE Standard 1149.1 Rule 3.5.1b, “The TDO driver shall be set to its inactive
drive state except when the scanning of data is in progress.” An optional
pullup may be required for the TDO pin to ensure no accidental activations
(see Figure 13–9 and Figure 13–10).
Figure 13–9. TDO Input Circuit for Test Activation
SCAN_ENBL
PAD
From TAP Controller
TDO
To TST_ENBL Circuit
Figure 13–10. Example TST_ENBL Circuit
TEST_REG
Run-Test/Idle
TST_ENBL
3-Input AND
Gate
TDO
The GTAP test register’s selected test features can be activated for dc
parametric testing under the following conditions:
❏
❏
❏
EST_REG is current instruction.
TAP Controller is in Run-Test/Idle state.
TDO pin is forced low.
Alternatively, an unused or shared input device pin can be dedicated for this
function. Some devices may not have any unused pins. Also, sharing a pin is
device-specific. By using the TDO pin (which always exists), integration into
the TI flow is simplified. This proposal assumes adoption of test activation
control via the TDO pin.
13-22
Design for Testability
Integrating Boundary-Scan Architecture and GTAP
13.4.4 Parametric Measurements Using Boundary-Scan Architecture and GTAP Test
Register
The IDDQ and IOZ tests are different when the GTAP test register is included.
The other tests are the same as without the GTAP test register.
VIH/VIL Test
The VIH/VIL test is the same as for the boundary-scan architecture without the
GTAP test register.
VOH/VOL Test
The VOH/VOL test is the same as for the boundary-scan architecture without
the GTAP test register.
IDDQ Test
The IDDQ test comprises the following steps.
Step 1: Set ATE for an IDDQ test. All output and bidirectional pins are
unloaded.
Step 2: Initialize the device for test.
1) Apply power to the device under test.
2) Initialize the TAP controller by setting TMS to a logic high and toggling
TCK with five rising clock edges.
3) Apply sufficient normal vectors to prevent device states that may harm
the device (i.e., prevent bus contention).
Step 3: Initialize the GTAP test register.
1) Load TAP controller with TEST_REG private instruction.
2) Transition TAP through the following states:
Update-IR→Select-DR-Scan→Capture-DR→Shift-DR
3) Serially apply GTAP test register data to the TDI pin and clock each bit
with the rising edge of TCK. The GTAP test register data is programmed
to force SRAMs into standby mode and turn off through-current macros.
4) Transition TAP through the following states:
Exit1-DR→Update-DR→Run-Test/Idle
IEEE Standard 1149.1-Based dc Parametric Testing
13-23
Integrating Boundary-Scan Architecture and GTAP
5) Upon leaving the Shift-DR TAP state, force the TDO pin high.
Step 4: Apply customer-provided test vectors to device, stopping at vector
of interest.
Step 5: Force SRAMs into standby mode and turn off through-current
devices (pullups and pulldowns) by forcing the TDO pin low.
Step 6: Measure IDDQ at VCC pin.
Step 7: Return SRAMs and through-current devices to their normal states
by forcing the TDO pin high.
Step 8: Repeat Step 4 through Step 6 for all vectors of interest.
Step 9: Reset the TAP. Transition TAP through the following states:
Select-DR-Scan→Select-IR-Scan→Test-Logic-Reset
IIH/IIL Test
The IIH/IIL test is the same as for the boundary-scan architecture without the
GTAP test register.
IOZ Test
The IOZ test comprises the following steps.
Step 1: Initialize the device for test.
1) Apply power to the device under test.
2) Initialize the TAP controller by setting TMS to a logic high and toggling
TCK with five rising clock edges.
3) Apply sufficient normal vectors to prevent device states that may harm
the device (that is, prevent bus contention).
Step 2: Initialize the GTAP test register.
1) Load TAP controller with TEST_REG private instruction.
2) Transition TAP through the following states:
Update-IR→Select-DR-Scan→Capture-DR→Shift-DR
3) Serially apply GTAP test register data to TDI pin and clock each bit with
rising edge of TCK. The GTAP test register data is programmed to turn
off through-current macros.
13-24
Design for Testability
Integrating Boundary-Scan Architecture and GTAP
4) Transition TAP through the following states:
Exit1-DR→Update-DR→Run-Test/Idle
5) Upon leaving the Shift-DR TAP state, force the TDO pin high.
Step 3: Set all bidirectional pins to input mode and all 3-state output buffers
to high-impedance state.
1) Load SAMPLE/PRELOAD instruction (refer to instructions).
2) Transition TAP through the following states:
Update-IR→Select-DR-Scan→Capture-DR→Shift-DR
3) Serially apply boundary-scan register data to TDI pin and clock each bit
with rising edge of TCK. The boundary-scan register data must force all
bidirectional pins to output mode. All 3-state output pins should be in
high-impedance state.
4) Transition TAP through the following states:
Exit1-DR→Update-DR→Select-DR-Scan→Select-IR-Scan
5) Load EXTEST instruction.
Step 4: Turn off through-current devices (pullups and pulldowns) by forcing
the TDO pin low.
Step 5: Measure IOZ leakage current at each 3-state output pin with the
ATE.
Step 6: Return through-current devices to their normal states by forcing the
TDO pin high.
Step 7: Repeat Step 3 through Step 6 but with through-current devices left
on to measure pullup/pulldown current.
Step 8: Reset the TAP. Transition TAP through the following states:
Select-DR-Scan→Select-IR-Scan→Test-Logic-Reset
13.4.5 VIH/VIL and VOH/VOL Test on TAP Pins
The VIH/VIL and VOH/VOL tests are the same as for the boundary-scan
architecture without the GTAP test register. Same as for boundary-scan
architecture without GTAP test register.
IEEE Standard 1149.1-Based dc Parametric Testing
13-25
Integrating Boundary-Scan Architecture and GTAP
13-26
Design for Testability
Chapter 14
Military ASIC
This chapter summarizes military ASIC documents and the location of
military-specific design information. This additional military-specific
information is necessary to complete a military design.
Topic
Page
Military-Specific Design Information . . . . . . . . . . . . . . . . . . . . . . 14–2
Military ASIC Topics Cross-Reference . . . . . . . . . . . . . . . . . . . . 14–3
14-1
Military-Specific Design Information
14.1
Military-Specific Design Information
Although the information provided in submicron ASIC documentation applies
to military designs as well as commercial, the following documents contain
additional information specific to military designs. These military-specific
documents should be considered the primary sources of information for
military designs.
❏
Military family data sheets that contain product and macro library
descriptions, an overview of the design flow and tools, and a summary of
the product families.
❏
The Military ASIC Design/Test Guidelines document that contains the
following additional information needed to complete a military ASIC
design:
■
Design guidelines
■
■
■
■
■
■
■
■
■
■
■
■
Output buffer selection
Pullup/pulldown input macros
Power pin requirements
Power estimation
Package pin placement
Handoff requirements
Military standards compliance
Test application notes
Test strategy considerations
Tester constraints
Military ASIC dc parametric application notes
Prototype and production testing
Military designs are currently supported in a variety of packages. The
package availability/offering to support military designs is continually being
updated and expanded. A TI representative can supply you with the current
status and availability of specific packages.
14-2
Design for Testability
Military ASIC Topics Cross-Reference
14.2
Military ASIC Topics Cross-Reference
Table 14–1 provides a cross-reference of the most common ASIC design
topics and their applicable documents. The table indicates summary and
detailed information.
Table 14–1. Military ASIC Topics Cross-Reference 1
Submicron ASIC Documents 2
Military-Specific
Military ASIC Topics
FDS
MADG
MLS DM DSM DFT ACE CHIPS TSG MDF
Product description
S
S
D
Macro library description
S
S
D
Ratings, conditions, and characteristics
D
D
D
Power estimation
D
D
D
D
D
D
Package drawings and characteristics
Design considerations for packaging
D
D
Detailed macro tables
S
D
VCC, temperature, and process multipliers
D
D
Gate array design practices
D
D
D
D
S
D
D
D
S
D
D
D
D
Design flow and handoff requirements
S
D
Design for testability
S
D
Test pattern requirements
S
D
TI Design Environment (TIDE)
S
D
Datapath and memory compiler (ACE)
S
S
Floorplanning (CHIPS)
S
S
Digital PLL application note
Symbols and definitions
Notes:
Legend:
S
S
D
S
D
D
D
D
D
1) S = Summary information, D = Detailed information
2) Refer to the Preface for a list of submicron ASIC documents.
FDS
MADG
MLS
DM
DSM
DFT
ACE
CHIPS
TSG
MDF
BiCMOS and CMOS Family Data Sheets
Military ASIC Designer’s Guide
BiCMOS and CMOS Arrays Macro Library Summaries
BiCMOS and CMOS Design Manuals
Design Software Manual
Design for Testability Reference Guide
ASIC Compiler Environment User’s Guide
CHIPS Reference Guide
Test Synthesis User’s Guide
Mentor Design Flow User’s Guide
Military ASIC
14-3
14-4
Design for Testability
Appendix A
Glossary
A
ACE: ASIC Compiler Environment. The graphical user interface delivery
mechanism for submicron gate-array memory compiler elements.
ASIC: Application Specific Integrated Circuit. A device designed for a user
application, usually by the user.
asynchronous logic: A collection of logic elements with the signal timing
entirely dependent on the propagation delay of all elements in the signal
path. The resulting signal flow timing changes with variations in process
control, temperature, and power-supply voltage.
ASIC TDL 91: An improved TI TDL format that supports both narrow and
wide (SCAN) TDL. Narrow TDL lists the ATE state for all pins in every
cycle. Wide or SCAN TDL allows a description of only nonredundant ATE
states and pins.
ATE: Automated Test Equipment. Machines used to test silicon.
ATPG: Automatic Test Pattern Generation. A process by which the vectors
required to produce a high-fault coverage for a design are generated by
a program. These tools generally require scans in synchronous designs
and assume certain scan rules.
at-speed testing: Refers to test vectors that target the detection of delay
faults. The term usually apllies to test vectors that operate at design
frequency or that validate setup conditions.
AUTOGEN: A TI software tool that compiles an automated test equipment
program (ATE) program from TDL.
Automatic Test Pattern Generation: A methodology, using software tools,
to generate test patterns. Test patterns attempt to control and observe
each circuit node using a stuck-at model.
1
B
back annotation: The process of updating the design database with actual
interconnect delays (as opposed to estimations by design CAD software). The actual delays are calculated after placement and routing,
when exact interconnect lengths are known.
BIST: Built-In Self-Test. The capability of a product to carry out a functional
test of itself. Some support from external equipment may be required.
BIST usually involves special hardware in the product to generate input
stimuli and to analyze test responses.
block: A group of interconnected cells. May contain instances of other
blocks.
BNF: Backus Naur Form. A description of ASIC TDL 91.
BTL: Backplane Transceiver Logic. A form of transmission line driver and
receiver circuitry specified by IEEE Std 1149.1.
bus: A data distribution path that typically has multiple data receivers and
can have multiple data sources. Bus structures must be driven by threestate drivers. The drivers must be capable of disconnecting from the bus,
and only one such source can be active at one time.
bus contention: If more than one bus driver is active with conflicting output
levels at the same time, neither driver may be able to assert a true logic
level on the bus line. The result could be excessive drive current, undefined logic levels, and possible device failure.
bus holder: A logic device that prevents a bus from floating if all bus drivers
are placed into the high-impedance state. It maintains the last logic state.
C
cell: An individual component of a library (typically a logic gate; for example,
a NA210 2-input NAND gate). See macro.
CHIPS: Comprehensive Hierarchical Physical Synthesis. TI’s submicron
gate-array floorplanning tool designed to improve design cycle time by
decreasing layout iterations. Includes PRELUDE delay estimation capabilities plus full graphic floorplanning.
circuit initialization: A sequence of stimuli that sets internal nodes of a
circuit to a predictable known state.
2
Design for Testability
clock skew: The difference in clock edge timing across the chip. Loading
and interconnect capacitance cause the active clock edge to be delayed,
possibly disrupting critical circuit timing.
clocked scan: An edge-triggered scan methodology. The clocked scan flipflop has separate clock and data inputs for scan- and system-mode operation.
CMOS: Complementary Metal Oxide Semiconductor. A form of digital logic
that has the characteristics of low power consumption, wide power supply
range, and high noise immunity.
combinational fault: A functional fault whose effect on the behavior of the
circuit is not affected by the sequence of the input stimuli.
controllability: The ability of a node to be established at specific logic states
by applying stimuli to the circuit’s externally accessible nodes.
core logic: All logic functions except I/O buffers are core logic.
critical path:
Any path with special timing requirements.
CTL: CMOS Transceiver Logic. A form of transmission-line driver and receiver circuitry. These circuits allow CMOS devices to communicate in
a low-noise, terminated-transmission-line environment.
D
delay fault: A fault in a circuit that causes failure to meet ac specifications
but might not cause functional failure.
design-for-testability feature: Lets you specify a list of placement rules
describing the connectivity of any logic path you want to group.
design requirements document: A document to guide the product development that states the goals of the design. This type of document usually
includes functional description, performance goals, cost goals, testability
goals, and quality goals.
detectable fault: A functional fault for which a test pattern can be created
that always causes the effects of the fault to be observable at an externally accessible node.
detected fault: A functional fault that causes effects that are observed at
an externally accessible node when the circuit is exercised by the existing
test pattern.
Glossary
3
DFT: Design for Testability. A design goal requiring that each node be both
observable and controllable. Failure to achieve this design goal can
compromise quality assurance.
E
ECL: Emitter-Coupled Logic. A nonsaturating form of digital logic that eliminates transistor storage time as a speed-limiting characteristic, permitting very-high-speed operation.
F
fault: A defect that can cause a failure in the circuit operation/timing.
fault detectability ratio: The ratio of detectable faults to the sum of detectable and undetectable faults.
fault grade: A measurement of the efficiency of test vectors to detect manufacturing defects in silicon. The fault-grade value is usually presented
as a percentage of the stuck-at faults that can be identified using those
test vectors.
fault grading: The process of determining the test pattern fault coverage of
a circuit.
fault-tolerant design: A design approach to enhance the ability of a circuit
to remain operational after the occurrence of a fault. Fault-tolerance design techniques can impact fault detection.
floating bus: Any bus line not driven by an active device is free to assume
any voltage level. Circuits with inputs connected to this bus may draw
excessive current or otherwise malfunction.
floating input: The input of a macro can assume an undefined voltage level
if it is not driven to a defined logic level. Circuits with floating inputs can
draw excessive current or otherwise malfunction.
functional fault: A fault that causes improper logical operation of a circuit.
G
GTAP: Generic Test Access Port. The TI ASIC test controller. The GTAP can
be instructed to enable or disable any combination of DFT features.
4
Design for Testability
I
I/O: Input/Output. An input/output or bidirectional buffer cell used to connect
design interface signals directly to package pins.
ICCQ:
IDDQ:
A TI term for IDDQ. See IDDQ.
DC leakage testing looks for abnormally high VCC current that indicates a logic or process defect. Test conditions for IDDQ testing must turn
off all circuits that produce dc current in the static state.
J
JTAG: Joint Test Action Group. 1) Committee that established the test access port (TAP) and boundary-scan architecture defined in IEEE Standard 1149.1-1990. 2) Common name for IEEE Std1149.1-1990.
L
LSSD: Level-Sensitive Scan Design. A scan methodology. It is a technique
where all logic storage elements in a device are chained together in a
dual mode. The first mode is the normal operation of the device where
clocks allow the storage of data in normal system operation. In the second mode, master and slave clocks are used to shift data in and out of
the device for testing purposes.
M
MegaModule:
ter files.
High-complexity macros such as SRAMs, FIFOs, and regis-
multiplexed flip-flop scan: Multiplexed flip-flop scan design is a scan methodology. It is a technique where all logic storage elements in a device
are chained together in a dual mode. A 2:1 multiplexer is placed at the
input of the logic storage elements. The first mode is the normal operation
of the device where the multiplexer allows the storage of data in normal
system operation. In the second mode, the multiplexer allows the shifting
of data in for test purposes.
netlist: A description of a logic circuit that names the macros used and
describes their interconnection.
Glossary
5
node: The end-point of a branch in a network or a point at which two or more
branches meet.
O
observability: The ability to determine the logic states of an internal circuit
node at the circuit’s externally accessible nodes.
open circuit fault: A fault in a circuit that alters the number of nodes by
breaking a node into two or more nodes.
P
parametric fault: A fault in a circuit that causes failure to meet ac or dc
specifications but might not cause functional failure.
parametric test: These are electrical tests that evaluate parameters such
as dc and ac electrical characteristics ( VIH, IDDQ, VOH, tpd, etc. ).
PECL: Pseudo ECL. Logic that is implemented to operate with standard 5V VCC and GND power supplies.
PMT: Parallel Module Test. A system of additional logic built into MegaModules for the purpose of enhancing the testability of the circuitry. Package
input and output pins are multiplexed with internal test circuitry to minimize the need for package pins dedicated to testing.
prelayout simulation: Accomplished as part of verification that the design
meets design specifications. To be effective, simulation must include
circuit evaluation using both minimum and maximum propagation delays.
The only unknown is actual interconnect capacitance. Interconnect capacitance is estimated by the design CAD software to give an assumed
value.
R
redundant circuit: Deliberate duplication of logical functions to create backup functions that enhance performance or reliability of operation.
RTL: Register Transfer Level. A subset of behavioral modeling constructs
that can be used to model a circuit at the level of data flowing between
a set of registers. This level of abstraction typically contains little timing
information, except references to a set of clock edges and features.
6
Design for Testability
S
scan path: A shift register made up of the logic storage elements (standalone bit-storage devices). In test mode, the storage elements are connected in a shift register. During normal operation they carry out their
normal system functions. The scan path is used to shift test data into the
logic storage elements for controllability and to shift out test response
data for observability.
sequential fault: A functional fault whose effect on the behavior of the circuit
is affected by the sequence of the input stimuli.
short circuit fault: A fault in a circuit that alters the number of nodes by
connecting two or more nodes together.
simulation: The process of using workstation software to exercise a logic
design. When properly done, simulation verifies both circuit timing and
logic functionality.
state machine: A logic block that can assume any of several output logic
states in response to input stimuli. Each logic state is uniquely determined from the previous state and the previous input.
stuck-at-0 fault: A fault in a digital circuit characterized by a node remaining
at a logic low (0) state regardless of changes in input stimuli.
stuck-at-1 fault: A fault in a digital circuit characterized by a node remaining
at a logic high (1) state regardless of changes in input stimuli.
synchronous logic: Any group of logic storage elements through which the
signal flow timing is controlled by the system clock. Clock signals cause
data signals to advance from one logic storage element to the next, one
element at a time. The resulting signal flow is thus made predictable.
T
testable: An electronic circuit is testable if test patterns can be generated,
evaluated, and applied in such a way as to satisfy predefined levels of
performance defined in terms of fault-detection, fault-location, and testapplication criteria, within a predefined cost-budget and timescale.
TDL:
Test Description Language. A TI language defining test stimuli as a
series of input values and expected output values. The TDL file serves
as a source file to program the automated testers used for production
test.
Glossary
7
test pattern: A set of test vectors.
test pattern fault coverage: The ratio of the total number of detected faults
to the total number of detectable faults.
test program: A test pattern and instructions suitable for use on automated
test equipment (ATE). A test program can be used to perform functional
and parametric (ac, dc, or other) tests.
test vector: A single instance of input stimuli and expected output responses.
U
undetectable fault: A functional fault for which no set of functional test vectors can be created that can guarantee that the effects of the fault are
observable at an externally accessible node.
undetected fault: A functional fault that causes effects that are not observed
at an externally accessible node when the circuit is exercised by the
existing test pattern.
V
VCC:
Positive supply voltage or the voltage required across supply and
ground terminals of a TTL or CMOS integrated circuit
VDD:
Positive supply voltage or the voltage required across supply and VSS
terminals of a CMOS integrated circuit
VSS:
8
Ground terminal of a CMOS integrated circuit
Design for Testability
Index
$ 1-2
( ) 1-2
)
keyword fields end with 12-18
, 1-2
. 1-2
_ 1-2
” 1-2
0
TDL character 12-15
1
TDL character 12-15
A
ac critical paths
pattern sets 3-9
scan path loading on 6-11
ac margin 3-2
ACE
defined 1
activating, IR, updateIR group does 13-6
ad hoc tests 5-1
asynchronous circuits 5-7
bidirectional buffers 5-4
counters 5-10
dividers 5-10
gated clocks 5-8
internal clocks 5-9
internal node observability 5-3
Johnson counter test signal generator 5-18
known states 5-5
logic blocks 5-17
long counter chains 5-11
multiplexing direct access to logic 5-12
nesting sequential circuits 5-14
reconverging signals 5-16
redundant circuits 5-15
shift registers
observability obtained from 5-20
test signal generator 5-19
structured vs 5-2
analog MegaModules 9-9
ANALOG TDL
described 4-4
analogtodigital converter
PMT I/O hookup 9-9, 9-12
application specific integrated circuit 1-2
approaches to testability 5-2
area vs testability -2
arithmetic logic units
structured design approach not suited for 6-20
ASIC
defined 1
ASIC Compiler Environment
defined 1
ASIC compiler environment 1-2
ASIC TDL 91 1-2
defined 1
ASIC test controller 1-2
ASIC tests 8-6
ASIC_TEST ICCQ 10-14
ASIC_TEST statements
pintopin testing and 12-11
propagation delay test specifications in 12-17
quiescent power supply current measurements specified in 12-20
1
Index
asynchronous circuits
avoiding 5-7
gating clocks create 5-8
asynchronous clocks
not in scan path flipflops 6-10
asynchronous logic
defined 1
asynchronous timing
as ATPG constraint 11-9
ATE
block diagram 12-4
defined 1
loads 12-10
simulation example 12-11
logic simulator vs 12-2
pattern memory, DUT vectors stored in 12-3
test patterns operate on 12-1
ATPG 11-1
clock skew and 6-7
constraints 11-9
cycletime reduction from -3
debugging considerations 11-8
defined 1
design flow
typical 11-4
highfaultgrade test patterns and 3-10
introduction 11-2
path sensitization 11-5
scan designs 11-7
full 11-6
summary 11-10
testing considerations 11-8
tool -8
atspeed testing 4-4, 4-5, 12-5, 12-11
AUTOGEN
defined 1
PMT TDL sets converted by 4-5
automated test equipment 1-2
automatic test pattern generation 1-2
defined 1
automation, design
structured approach favors 6-2
B
back annotation
defined 2
backplane transceiver logic 1-2
Backus Naur Form 1-2
BiCMOS, TP0B0 macro 8-3
bidirectional buffers
test contention and 12-10
bidirectional buses
normal NAND tree patterns cause bus conflicts
10-6
bidirectional pins 1-2
internal access with 5-4
BIST
defined 2
TDL pattern sets for 4-3
BIST TDL 4-3
TGC1000 pattern set requirements 4-5
TGC2000 pattern set requirements 4-5
BIST TEST ENABLE, ASIC test 8-6
BIST_AC TDL
described 4-4
setup and hold testing and 12-11
TGC1000 pattern set requirements 4-5
TGC2000 pattern set requirements 4-5
bit definitions
for test register 8-5
block
defined 2
block diagrams
ATE 12-4
GTAP 8-2
GTAPcontrolled PMT 9-3
IEEE Standard 1149.1 hardware 13-3
BNF
defined 2
boundary-scan architecture 13-10
boundaryscan architecture 3-2, 7-2, 7-4, 10-12,
13-3, 13-5, 13-7, 13-8, 13-9, 13-10, 1312, 13-13, 13-14, 13-15, 13-16, 13-18,
13-19, 13-20, 13-21, 13-22, 13-23
boundaryscan cell 1-2, 13-5
boundaryscan instructions 13-8, 13-9, 13-14
boundaryscan macros 7-5, 7-6, 7-7
Index
2
Index
boundaryscan registers 1-2
BR
described 7-5
BSC
example 13-5
I/O signals pass through 13-3
BSR
dc parametric test resources 13-10
described 7-5
GTAP test register and
hardware, example 13-19
public instructions and 13-8
view of, simplified 13-4
BTL
defined 2
builtinself test 1-2
bus
defined 2
bus contentions
avoiding 12-5
bidirectional bus running normal NAND tree
patterns may cause 10-6
defined 2
internal
avoid 10-13
parametric test patterns and 10-2
removing 6-12
scan testing and 6-12
bus floating
preventing 12-5
bus holders
defined 2
bus interface boundary 6-14
bypass counters 5-10
bypass dividers 5-10
bypass register 7-5
C
C
TDL character 12-15
captureIR group
sampling done by 13-6
cautions
information about vi
cells 1-2
defined 2
characters
simulator mapping 1-2
CHIPS
defined 2
circuit
testable
described 5-2
circuit design
typical flow
ATPG 11-4
circuit initialization 5-5
defined 2
clear mechanism
controllability added with 5-6
CLKEDGE keywords 12-18
CLOCK 6-5
shift register and 5-19
clock edge
to output
pintopin testing of 12-12
clock inputs
circuit initialization to known state and 5-5
clocked scan flipflops 6-3
clock signals
GTAP test registers and 13-20
TDL 12-7
width, minimum
illustrated 12-9
clock skew
defined 3
edgetriggered flipflop scan and 6-7
CLOCK statements
TDL 12-7
Clocked LSSD scan flip-flop
circuit interconnect
illustrated 6-9
illustrated 6-8
clocked NAND tree
input threshold voltage levels tested with 10-4
illustrated 10-5
shared control pins
Index
3
Index
illustrated 10-8
TGC1000 configurations
illustrated 10-7
TGC2000 configurations
illustrated 10-7
clocked scan 3-7
defined 3
clocked scan flipflop scan designs 6-3
macros, TI offers 6-3
clocked scan flipflop scan designs
multiple scan chains
illustrated 6-16
clocks 1-2
adding
to asynchronous latch 5-7
constraints
ATPG 11-9
flipflop scan design and 6-10
clocktooutput measurements 12-19
CMOS
defined 3
CMOS transceiver logic 1-2
combinational fault
defined 3
commas (,)
keyword fields separated by 12-18
compatibility
planning for 3-13
compiled cells
structured approach not suited for 6-20
complementary metal oxide semiconductor 1-2
Comprehensive Hierarchical Physical Synthesis
defined 2
constraints
ATPG 11-9
contact ix
contentions 1-2
tester vs TTL/CMOS bidirectional buffers 1210
control pins
dedicated
clocked NAND tree circuit
illustrated 10-5
voltage level test patterns 10-6
shared
clocked NAND tree circuit
illustrated 10-8
voltage level test patterns
illustrated 10-9
controllability
adding
with clear mechanism 5-6
debugging time and -4
defined 3
of I/O ports, via BSC 13-5
of logic
multiplexing improves 5-12
scan designs and 6-2
test vector generation and 5-2
controller 1-2
generic test access port
communication protocol 8-8
core logic
defined 3
costofownership -8
costs 1-2
of ownership -5
faultgrade requirements as part of 3-4
illustrated -9
tradeoffs -4
counters
bypassing 5-10
critical path
defined 3
crosscoupled latches 6-10
CTL
defined 3
D
DATA 6-3, 6-5
data corruption
bus contention causes 6-12
data inputs
clocked scan flipflops 6-3
data register
TAP group 13-6
dc leakage current
Index
4
Index
measuring 10-13
dc leakage test 1-2, 3-10
dc parametric measurements 10-1
input current 10-12
input threshold voltage levels
using clocked NAND tree 10-4
leakage current 10-13
output voltage levels 10-10
overview 10-2
threestate highimpedance 10-11
using boundary-scan architecture
resources 13-10
using boundaryscan architecture
GTAP and
test activation control pin
TDO input circuit for 13-22
TST_ENBL circuit 13-22
test register
architecture example 13-20
load time diagram 13-21
using boundaryscan architecture 13-10
using boundaryscan architecture
GTAP and
hardware registers 13-19
integrating 13-18
private instruction TEST_REG 13-19
test activation control pin 13-21
test register 13-20, 13-23
dc parametric testing 1-2, 4-2, 13-1
boundaryscan architecture 13-3, 13-5, 13-7,
13-8, 13-9
hardware block diagram 13-3
introduction 13-2
resources for 13-10
TGC1000 requirements 4-5
TGC2000 requirements 4-5
dc parametric tests
using boundaryscan architecture
IDDQ 13-13
IIH/IIL 13-14
IOZ 13-15
VIH/VIL 13-10
VIH/VIL and VOH/VOL (TAP pins) 13-16
VOH/VOL 13-12
dc threshold testing
VIH-VIL TDL for 4-4
dc through current
dc parametric test resources 13-10
DC_PARA TDL
described 4-3
output voltage levels 10-10
parametric test pattern sets assigned to 10-2
TGC1000 pattern set requirements 4-5
TGC2000 pattern set requirements 4-5
threestate highimpedance measurements 1011
debugging
ATPG considerations 11-8
diagnostic pattern sets, establishing for 3-9
time
design for testability impact on -4
decoupling
linked logic blocks 5-17
defect levels
ASIC PPM vs PCB PPM rates
illustrated -8
fault coverage vs -5
for PCB designs -7
highfaultgrade test pattern set for low -8
Motorola, Delco study results -6
Williams model -5
delay fault
defined 3
delays
minimum
not tested 12-12
Delco
Williams study supported by study from -6
design
practices
committing to
for DFT strategy development 3-3
reasons for using -1
design automation
structured approach favors 6-2
Design Automation Division 1-2
Design Flow Users Guide vii
design help ix
Design Requirements Document
defined 3
Index
5
Index
faultgrade requirements inclusion in 3-4
designfortestability feature
defined 3
detectable fault
defined 3
detected fault
defined 3
development cycle
timetomarket and -3
development time
fault grade vs
illustrated -3
device identification register 7-5
device under test
vectors applied to
stored in ATE pattern memory 12-3
devices
damage to
bus contention causes 6-12
initialization
dc parametric test resources and 13-10
pin test activation 13-21
TDO input circuit for
example 13-22
TST_ENBL circuit
example 13-22
DFT
concepts
key 5-2
defined 4
economic tradeoffs for -4
feature
defined 3
flow, typical 11-3
ATPG 11-4
GTAP 8-1
logic design, keeping in mind 5-2
militaryspecific information 14-1, 14-3
purpose 5-2
reasons for using -1
fault coverage -5
introduction -1
ownership cost -5
testability needed -2
testtime costs -2
timetomarket -3
scan designs 6-1
strategy development 3-1
committing to 3-3
compatibility
planning for 3-13
diagnostic pattern set, creating 3-9
faultgrade requirements establishing 3-4
flowchart 3-14
gate density as base for 3-6
highfaultgrade test patterns, generating 3-10
IEEE Std 1149.1 as system requirement 3-5
structured tools
choosing 3-7
technology, selecting 3-2
test patterns
converting
to TDL 3-12
simulations 3-11
timing patterns, simulating 3-11
structured approaches 6-2
DIAGNOST TDL
described 4-4
if BIST TDL fails 4-3
TGC1000 pattern set requirements 4-5
TGC2000 pattern set requirements 4-5
diagnostics
pattern set establishment for debugging 3-9
differential amplifier
PMT I/O hookup 9-18, 9-19
digitaltoanalog converter
PMT I/O hookup 9-15, 9-16
direct access
to logic
multiplexing provides 5-12
directconnect PMT 1-2
dividers
bypassing 5-10
documentation
militaryspecific ASIC 14-3
double quotes (”)
keyword fields end with 12-18
DR
TAP group 13-6
duration
Index
6
Index
minimum
of test periods 12-4
DUT
vectors applied to
stored in ATE pattern memory 12-3
E
ECL
defined 4
economics 1-2
tradeoffs -2, -4
edgetriggered clocks 5-8
edgetriggered flipflop scan designs 6-7
efficiency
scan designs not noted for 6-20
embedded memories
PMT tests 3-6
emittercoupled logic 1-2
EXPANSION
ASIC test 8-6
external chip circuitry
EXTEST instruction designed to test 13-9
EXTEST instructions 13-9
input threshold voltage levels checked using
clocked NAND tree 10-4
output voltage levels 10-10
threestate highimpedance measurements and
10-11
F
falltime measurements 1-2
fault
defined 4
fault coverage
described 1-2
determining target 11-2
device defect level vs -5
Motorola Delco study results -6
tradeoffs -4
fault detectability ratio
defined 4
fault grade 1-2
defined 4
development time vs
illustrated -3
requirements
establishing as part of DFT strategy development 3-4
fault grader -8
fault grading
defined 4
fault simulation 1-1
multiple scan chain designs and 6-14
faulttolerant design 4
feedback loops
combinatorial
as ATPG constraints 11-9
feedback paths
breaking
in nested sequential circuits 5-14
scan flipflops and 6-10
field maintenance costs
fault coverage and -5
flipflop outputs 5-13
flipflop scan designs 5-5, 6-3, 6-5, 6-7, 6-10
floating bus
defined 4
floating I/O inputs
avoid 10-13
floating input
defined 4
floating internal nodes
avoid 10-13
frequency dividers 5-5
FROM keywords 12-18
full scan designs 11-6
FUNC TDL
described 4-3
TGC1000 pattern set requirements 4-5
TGC2000 pattern set requirements 4-5
FUNC_AC TDL
described 4-4
setup and hold testing and 12-11
TGC1000 pattern set requirements 4-5
TGC2000 pattern set requirements 4-5
Index
7
Index
functional fault
defined 4
G
gate density
DFT strategy development based on 3-6
gatecount margin 3-2
gated clocks
avoiding 5-8
GBUSENZ signals 13-20
generating
test patterns 12-1
ATE block diagram 12-4
creating 12-6
input delay groups 12-6
illustrated 12-7
TDL
example 12-15
propagation delay measurements
specifying, in TDL 12-17
quiescent current measurements 12-20
scan 12-19
TDL clocks 12-7
ATE loads 12-10
simulation 12-11
definition
example 12-8
output strobe groups 12-9
placement, illustrated 1210
performance test procedures
12-11
test precautions
special 12-10
width, minimum
example 12-9
introduction 12-2
synchronous pattern use
example 12-3
tester priod slip 12-5
generic test access port 1-2
GTAP 1-2, 8-1
block diagram 8-2
defined 4
integrating
with boundaryscan architecture 13-18, 1319, 13-20, 13-21, 13-22, 13-23
overview 8-2
PMT
control block diagram 9-3
controlled by 9-2
PMTSETUP TDL initializes 4-4
Test Register 13-20
and boundaryscan registers 13-19
architecture example 13-20
load timing diagram 13-21
TEST_REG instruction and 13-19
Test Registers 8-3
GTAP controller 8-7
multiplexed PMT I/O hookups and 9-7
state transition diagram 8-9
GTAPCHK TDL
described 4-4
scan path integrity verified by 4-4
TGC1000 pattern set requirements 4-5
TGC2000 pattern set requirements 4-5
GTSTEN signals 13-20
guidelines
for flipflop scan designs 6-10
H
H
TDL character 12-15
hardware
design testability affects on 1-1
overhead
for multiplexed flipflop scan designs 6-6
help with designs ix
HI Z
ASIC test selection codes 8-6
Index
8
Index
TP000 bit assignments 8-5
highfrequency testing 12-5
hookup
analogtodigital converter
multiple PMT I/Os 9-12
single PMT I/O 9-9
differential amplifier
multiple PMT I/O 9-19
single PMT I/O 9-18
digitaltoanalog converter
multiple PMT I/O 9-16
single PMT I/O 9-15
multiple MegaModule PMT I/O 9-7
single MegaModule PMT I/O 9-5
I
I/O
defined 5
I/O buffers
multiplexed PMT and 9-7
I/O ports
BSC connects 13-5
ICC TDL
TGC1000 pattern set requirements 4-5
TGC2000 pattern set requirements 4-5
ICCQ
defined 5
keywords 12-20
IDDQ
defined 5
test location and pattern set identification 1014
IDDQ TDL
described 4-3
IDDQ test 1-2, 13-10, 13-13
location and pattern set identification 10-14
using boundaryscan architecture and GTAP
test register 13-23
IDR
described 7-5
IEEE Standard 1149.1 1-2, 7-1
boundaryscan architecture 7-3, 7-4
circuit not adhering to
threshold circuitry needs to be added to 10-4
dc parametric measurements 10-2
using boundary-scan architecture 13-10
using boundaryscan architecture 13-10, 1318, 13-19, 13-20, 13-21, 13-22, 1323
dc parametric testing based on 13-1
boundaryscan architecture 13-3, 13-5, 13-7,
13-8, 13-9
hardware block diagram 13-3
introduction 13-2
dc parametric tests
using boundaryscan architecture 13-10, 1312, 13-13, 13-14, 13-15, 13-16
DFT strategy development requirement 3-5
output voltage levels testing and 10-10
overview 7-2
threestate highimpedance measurements and
10-11
IEEE Standard Test Access Port and BoundaryScan Architecture (JTAG) 1-2
IIH/IIL test 13-10, 13-14
using boundaryscan architecture and GTAP
test register 13-24
IIH/IIL/IOZ CURRENT
ASIC test 8-6
initializing
circuit
to known state 5-5
flipflop scan designs and 6-10
input current 10-12
measuring 10-12
input delay groups
test period relationship to 12-6
illustrated 12-6
input signals
delays
setup and hold verification of 12-11
FROM keyword indicates 12-18
input delay group is set of 12-6
test vectors define 12-6
input threshold voltage levels
clocked NAND tree for testing 10-4
illustrated 10-5
shared control pins
illustrated 10-8
TGC1000 configurations 10-7
Index
9
Index
TGC2000 configurations 10-7
input/output
defined 5
instruction register 1-2
instructions
loading 13-8
internal clocks
bypassing 5-9
internal nodes
bidirectional pins give access to 5-4
observability via unused pins 5-3
introduction 1-1
inverter
isolating scan chain loading with 6-11
IOZ test 13-10, 13-15
using boundaryscan architecture and GTAP
test register 13-24
IR
boundaryscan operations programmed
through 13-3
described 7-5
TAP group 13-6
J
Johnson counter
test signal generator 5-18
Joint Test Action Group 1-2
JTAG 3-2
defined 5
L
L
TDL character 12-15
latches
set, reset capabilities needed for circuit initialization 5-5
layout errors
failures and 11-8
leakage current 10-13
levelsensitive scan design 1-2
linked logic blocks
uncoupling 5-17
load timing
test register
diagram 13-21
loading
IR
shiftIR group does 13-6
logic
adding 1-1
compatibility
planning for 3-13
direct access
multiplexing provides 5-12
redundant
removing 5-15
logic blocks
linked
decoupling 5-17
logic design
failures based on 11-8
logic feedback paths
scan flipflops and 6-10
logic functions
FUNC TDL verifies 4-3
PMT TDL verifies 4-4
logic integrity
SCAN TDL verifies 4-3
logic simulation 3-11
logic simulator
ATE vs 12-2
logic verification
responsibilities for 4-2
SCAN_AC TDL and 4-4
TGC1000 TDL pattern set requirements 4-5
TGC2000 TDL pattern set requirements 4-5
logic waveforms
test vectors and corresponding 12-17
long counter chains 5-11
long scan chains
multiple scan chains vs 6-14
separating
from signal path 6-11
LSSD 3-8
ATPG and 11-5
Index
10
Index
defined 5
multiple clocked scan chains
illustrated 6-18
LSSD scan flip-flop design 6-8
M
M
TDL character 12-15
macro functions
structured approach not suited for 6-20
macros 1-2
clocked scan flipflop 6-3
multiplexed flipflop scan design 6-5
MagaModules
test collar 9-4
mask fabrication defects
failures and 11-8
MAX keywords 12-18, 12-21
MCLK
GTAP controller pin 8-7
measurements
parametric 10-1
input current 10-12
input threshold voltage levels
using clocked NAND tree 10-4
leakage current 10-13
output voltage levels 10-10
overview 10-2
threestate highimpedance 10-11
MegaModule
PMT I/O hookup 9-5, 9-7, 9-9, 9-12, 9-15, 916, 9-18, 9-19
MegaModules
defined 5
described 9-2
logic functions
tested by PMT TDL 4-4
multiplexed PMT
insystem use 9-21
rules 9-8
PMT I/O hookup 9-5, 9-7
PMT test for 9-2
PMT_SIM TDL verifies PMT hookup to package pins 4-4
memories
embedded
PMT tests 3-6
memory PMT collar 1-2
military ASIC 14-1
topic crossreference table 14-3
MIN keywords 12-18, 12-21
modules
testisolation 6-14
Motorola
Williams study supported by study from -6
MSELA
ASIC test selection codes 8-6
TP000 bit assignments 8-5
MSELN
ASIC test selection codes 8-6
TP000 bit assignments 8-5
MSELT
ASIC test selection codes 8-6
TP000 bit assignments 8-5
multiplexed flipflop scan 3-7, 6-5, 6-6, 5
multiplexed flipflop scan designs 6-17
multiplexed PMT 1-2
multiplexing
direct access to logic provided by 5-12
N
nesting
sequential circuits
feedback paths in
breaking 5-14
netlist
defined 5
node
defined 6
nondigital circuitry
structured approach not suited for 6-20
notational conventions v
Index
11
Index
O
P
observability
debugging time and -4
defined 6
of I/O ports, via BSC 13-5
of internal nodes
improving via unused pins 5-3
of logic
multiplexing improves 5-12
scan designs and 6-2
shift register used to obtain 5-20
test vector generation and 5-2
onchip oscillator circuitry 5-9
open circuit fault
defined 6
oscillators
PWRDN pin 10-13
oscilloscopes
ineffective in debugging ASIC systems -4
output signals
test vectors define 12-6
TO keyword indicates 12-18
output strobe groups
test pattern generation and 12-9
placement
example 12-10
precautions
special 12-10
output voltage levels
testing 10-10
overhead
for clocked scan flipflop designs 6-4
for multiplexed flipflop scan designs 6-6
overview
ATPG 11-2
GTAP 8-2
IEEE Standard 1149.1 7-2
parametric measurements 10-2
PMT 9-1
TDL 12-13
test pattern generation 12-2
ownership
costs -5
illustrated -9
package pins
pintopin testing of 12-11
parallel module test 1-2
parallel scan chains 3-8
parallel scan designs 6-14
parallel testing 6-14
time determined by longest chain 6-15
parametric fault
defined 6
parametric measurements 10-1
input current 10-12
input threshold voltage levels
using clocked NAND tree 10-4
leakage current 10-13
output voltage levels 10-10
overview 10-2
threestate highimpedance 10-11
parametric test
defined 6
partial scan 3-8
partial scans
designs 11-7
partitioning
circuits
in multiple scan chains 6-14
path sensitization
ATPG and 11-5
PATH statements
description 12-19
pattern sets
diagnostic
establishing 3-9
parallel module tests 4-4
scan 4-3
pattern statements
IDDQ 10-14
PCB
boundaryscannable 7-7
costofownership orderofmagnitude relationship for -8
defect rates for -7
ASIC PPM vs
illustrated -8
Index
12
Index
IEEE Standard 1149.1 and 7-1
IEEE Standard1149.1 and 3-5
PECL
defined 6
performance
TDL test procedures 12-11
atspeed testing 12-11
pintopin testing 12-11
setup and hold testing 12-11
testability and -2
period slip
described 12-4
tester
example 12-5
pins 1-2
TDL defines conditions for signal 12-19
unused
testability improved via 5-3
pintopin testing 12-11
PMT 1-2, 9-1
analog MegaModules 9-9
analogtodigital I/O hookup 9-9, 9-12
defined 6
DFT strategy development and 3-2
differential amplifier I/O hookup 9-18, 9-19
digitaltoanalog I/O hookup 9-15, 9-16
embedded memories tested with 3-6
MagaModules 9-2
multiple MegaModule I/O hookup 9-7
multiplexed
insystem use 9-21
rules 9-8
single MegaModule I/O hookup 9-5
TDL pattern sets for 4-4
test bus 9-6
PMT TDL
described 4-4
PMT TEST ENABLE
ASIC test 8-6
PMT_I/O
ASIC test selection codes 8-6
TP000 bit assignments 8-5
PMT_SIM TDL
described 4-4
PMTSETUP TDL
described 4-4
power supply
quiescent current measurements
ASIC_TEST statements define 12-20
predictability
of designs 5-2
prelayout simulation
defined 6
preload
multiplexed PMT appropriate for 9-21
PRELOAD instructions 13-8
printed circuit boards 1-2
private instructions
TEST_REG 13-19
process yields
in Williams model -5
PROP keywords 12-18
propagation delay tests 1-2
edgetriggered clock and 5-8
measurements
example 12-18
one needed per design 4-3
pintopin testing verifies 12-11
PROP keyword indicates 12-18
responsibilities for 4-2
specifying measurements in TDL 12-17
TGC1000 TDL pattern set requirements 4-5
TGC2000 TDL pattern set requirements 4-5
pseudo ECL 1-2
PU/PD CURRENT
ASIC test 8-6
public instructions 13-8
pulldown macros
PWRDN pin 10-13
pullup macros
PWRDN pin 10-13
pulsegenerating circuitry 5-9
PWRDN
ASIC test selection codes 8-6
TP000 bit assignments 8-5
PWRDN pin 10-13
PWRDN STATE
ASIC test 8-6
Index
13
Index
Q
quiescent power supply current measurements
ASIC_TEST statement defines 12-20
TDLCHKR a tool for 4-4
rules
multiplexed PMT 9-8
precautions
for test pattern creation 12-10
R
random access memory
structured approaches not suited for 6-20
random vector generation
ATPG 11-5
read only memory
structured design approach not suited for 6-20
reconverging signals
watching for 5-16
redundant logic
defined 6
testing 5-15
register files
structured approach not suited for 6-20
register transfer level
defined 6
registers 1-2
as overhead for multiplexed flipflop scan designs 6-6
REJECT keywords 12-18
reset capabilities
initializing circuit to known state requires, for
latches, flipflops 5-5
RESETZ
shift register and 5-19
RESTORE1
test condition 8-8
RESTORE2
test condition 8-8
review process
design
DFT strategy development and 3-4
risetime measurement 1-2
RTL
defined 6
rule checking
structured approach favors 6-2
S
safe circuit initialization pattern 10-4, 10-10, 1011
SAMPLE/PRELOAD instructions 13-8
input threshold voltage levels checked using
clocked NAND tree 10-4
output voltage levels 10-10
threestate highimpedance measurements and
10-11
sampling
IR
captureIR group does 13-6
SCAN
GTAP controller pin 8-7
scan 3-7
DFT strategy development and 3-2
sequential logic tested best with 3-7
scan chains
parallel 3-8
SCAN CLOCK 6-3, 6-4
clock skew and 6-7
scan designs 1-2, 6-1
bus contention
scan testing and 6-12
clocked scan flipflop 6-3
edgetriggered flipflop 6-7
flipflop guidelines 6-10
inefficiencies in certain structures 6-20
multiplexed flipflop 6-5
parallel 6-14
partial
ATPG and 11-7
scan path loading
on critical ac path 6-11
structured approaches 6-2
testisolation modules 6-14
SCAN ENABLE 6-5, 6-6
Index
14
Index
scan macros
partitioning logic reduces number of 6-15
scan paths
defined 7
flipflops 6-7
flipflops in 6-10
integrity
GTAPCHK TDL checks 4-4
SCANCHK TDL checks 4-3
inversions 6-11
isolating loading
with inverter
illustrated 6-11
loading
on critical ac paths 6-11
multiple
as testisolatable modules 6-14
clocked scan flipflop scan designs 6-16
LSSD
illustrated 6-18
multiplexed flipflop scan designs 6-17
patterns 6-18
test patterns, multiple 6-18
scan rings 6-20
SCAN statements
description 12-19
SCAN TDL
described 4-3
TGC1000 pattern set requirements 4-5
TGC2000 pattern set requirements 4-5
scan testing
bus contention and 6-12
SCAN_AC TDL
described 4-4
setup and hold testing and 12-11
TGC1000 pattern set requirements 4-5
TGC2000 pattern set requirements 4-5
SCANCHK TDL
described 4-3
TGC1000 pattern set requirements 4-5
TGC2000 pattern set requirements 4-5
SCANIN DATA 6-3, 6-5
SCANOUT 6-3
SCLK
GTAP controller pin 8-7
select inputs
circuit initialization to known state and 5-5
semicolon ( 12-18
sequential circuits
bypassing 5-10
nests
breaking feedback paths in 5-14
sequential fault
defined 7
sequential logic
scan approach best for testing 3-7
serial shift register
test register is 8-3
set capabilities
initializing circuit to known state requires, for
latches, flipflops 5-5
SET statements
description 12-19
setup and hold testing 12-11
shift registers
observability obtained by using 5-20
scan chain
circuit initialization to known state and 5-5
serial
test register is 8-3
test signal generator 5-19
shiftIR group
loading done by 13-6
short circuit fault
defined 7
signal generators
test
Johnson counter 5-18
shift register 5-19
signals
paths
long scan chains
separating from 6-11
reconverging 5-16
separating
unused pins control 5-17
types
TDL toggle states
required for various 10-3
silicon
Index
15
Index
overhead
for clocked scan flipflop designs 6-4
for multiplexed flipflop scan designs 6-6
simulations
ATE loads and 12-10
example 12-11
defined 7
test pattern 3-11
skew, scan 1-2
slave clock
interface circuit
TCKtoMaster 13-21
splitting long counter chains 5-11
SR 1-2
SRAM
MegaModules 9-2
SRAM OFF
ASIC test selection codes 8-6
SRAM standby
dc parametric test resources 13-10
SRAM_OFF
TP000 bit assignments 8-5
SRL 1-2
state machine
controllability
using clear to add
illustrated 5-6
defined 7
state machines
uncontrollable
illustrated 5-5
state transition diagram
GTAP controller 8-9
states
initializing circuit to known 5-5
static testing
ICC TDL facilitates 4-3
status check
multiplexed PMT appropriate for 9-21
strategies
for testability, developing 3-1
commitment to design practices 3-3
compatibility planning 3-13
diagnostic pattern set for debugging 3-9
faultgrade requirements 3-4
flowchart 3-14
gatedensity approach 3-6
highfaultgrade test pattern generation 3-10
IEEE Std 1149.1 as system requirement 3-5
structured tool selection 3-7
technology selection 3-2
test patterns
converting
to TDL 3-12
timing simulations 3-11
structured testing
ad hoc vs 5-2
structured tools
choosing 3-7
clocked scan 3-7
LSSD 3-8
multiplexed flipflop scan 3-7
parallel scan chains 3-8
partial scan 3-8
scan designs 6-2
stuckat0fault 7
stuckat1fault 7
surface contamination
circuit dc leakage current
measuring for 10-13
synchronous logic
defined 7
synchronous systems
ATEs are 12-2
system designers
IEEE Standard 1149.1 effect on 7-2
T
TAP 1-2
boundaryscan architecture 13-5
controller 7-4
dc parametric test resources 13-10
described 13-4
DFT strategy development and 3-2
IEEE Standard 1149.1 and 7-2
state diagram 13-7
Index
16
Index
TCK
boundaryscan architecture test pin 13-3
to Master
slave clock interface circuit 13-21
TDI
boundaryscan architecture test pin 13-3
TDL 1-2
BIST_AC pattern types 12-11
clocks 12-7
definition
example 12-8
width
minimum
illustrated 12-9
defined 7
example 12-15
FUNC_AC pattern types 12-11
IDDQ location 10-14
propagation delay measurements
specifying 12-17
quiescent power supply current measurements
defined in 12-20
scan 12-19
example 12-19
vectors 12-20
SCAN_AC pattern types 12-11
simulation timing and 3-11
test pattern created by 12-6
ATE loads 12-10
simulation example 12-11
clocks 12-7
input delay group 12-6
output strobe groups 12-9
placement
example 12-10
performance test procedures 12-11
precautions
special 12-10
test patterns
converting to 3-12
handing off
to TI in 4-2
toggle states required for signal types 10-2
types
described 4-3
BIST 4-3
pattern sets
required by all 4-3
PMT 4-4
scan 4-3
TDLCHKR
rule checker 4-4
TDO pins
as test activation control pin 13-21
example 13-22
boundaryscan architecture test pin 13-3
technologies
selecting, for DFT strategy development 3-2
TEST
GTAP controller pin 8-7
test access port 1-2
test access port controller 1-2
test activation control pin 13-21
TDO input circuit for
example 13-22
TST_ENBL circuit
example 13-22
test bus
PMT 9-6
test capability
overlooked in design process -2
Test Clock
boundaryscan architecture test pin 13-3
test collar
MegaModule 9-4
test controller 1-2
Test Data In
boundaryscan architecture test pin 13-3
Test Data Out
boundaryscan architecture test pin 13-3
test description language 1-2
test insertion
timetomarket and -3
Test Mode Select
boundaryscan architecture test pin 13-3
test pattern fault coverage 1-2
defined 8
test pattern sets
BIST 4-3
Index
17
Index
output strobe groups and 12-9
TDL requirements for 4-3
test patterns
compatibility
planning for 3-13
converting
to TDL 3-12
dc parametric measurements and 10-2
defect levels and -8
defined 8
fault grade vs development time and
illustrated -3
for MegaModules, TI provides 3-7
for threshold voltage measurements
dedicated control pins 10-6
shared control pins 10-9
generating 12-1
ATE block diagram 12-4
development cycle time and -3
introduction 12-2
path sensitization 11-5
synchronous pattern for use during functional test
example 12-3
TDL
ATE loads
simulation example 12-11
creates 12-6
example 12-15
input delay groups 12-6
output strobe groups 12-9
performance test procedures 12-11
propagation delay measurements, specifying 12-17
quiescent power supply current measurements defined in 12-20
scan 12-19
example 12-19
vectors 12-20
TDLs create
ATE loads 12-10
clocks 12-7
output strobe groups
placement
example 12-10
precautions
special 12-10
tester period slip 12-5
handing off
to TI
in TDL format 4-2
highfault grade 11-1
highfaultgrade 3-10
requirements 4-1
responsibilities for providing 4-2
scan path
multiple 6-18
simulations 3-11
TDL type descriptions 4-3
test costs and -2
timing 3-11
test periods
duration of
minimum 12-4
input delay group relationship to
illustrated 12-7
test pins
boundaryscan architecture 13-3
test procedures
performance
TDL 12-11
atspeed testing 12-11
pintopin testing 12-11
setup and hold testing 12-11
test program
defined 8
test register 8-3
architecture
typical
illustrated 8-4
bit definitions 8-5
building block
illustrated 8-3
described 8-3
test selection codes 8-6
Test Reset
boundaryscan architecture test pin 13-3
test selection codes
for test register 8-6
test signal generators
Johnson counter 5-18
Index
18
Index
shift registers 5-19
test signals
injecting 5-3
test vectors 1-2
corresponding logic waveforms and 12-17
dc parametric test resources 13-10
defined 8
described 12-2
DFT and 5-2
input signals defined by 12-6
multiple scan chain designs and 6-14
numbers of
minimizing 12-3
output signals defined by 12-6
propagation delay measurements
specifying, in ASIC_TEST statements 12-17
quiescent power supply current measurements
specifying 12-20
TDL contains 3-12
TEST_REG instructions 13-19
TEST1
test condition 8-8
test register codes 8-6
TP000 bit assignments 8-5
TEST2
test condition 8-8
test register codes 8-6
TP000 bit assignments 8-5
testability
ad hoc schemes 5-1
asynchronous circuits 5-7
bidirectional buffers 5-4
counter chains 5-11
counters 5-10
dividers 5-10
gated clocks 5-8
internal clocks 5-9
internal node observability 5-3
Johnson counter test signal generator 5-18
known states 5-5
logic blocks 5-17
multiplexing direct access to logic 5-12
nesting sequential circuits 5-14
reconverging signals 5-16
redundant circuits 5-15
shift register
observability obtained from 5-20
shift registers
test signal generator 5-19
area impact and -2
introduction 1-1
of logic
multiplexing improves 5-13
overlooked, in design process -2
performance impact and -2
principles, applying early in process 1-1
scan designs and 6-2
schemes 1-2
structured 6-1
approaches to 6-2
bus contention
scan testing and 6-12
clocked scan flipflop 6-3
edgetriggered flipflop 6-7
flipflop scan design 6-10
LSSD 6-8
multiplexed flipflop 6-5
scan path loading
on critical ac path 6-11
scan paths 6-20
testisolatable modules 6-14
testisolation modules
multiple scan paths
patterns 6-18
testisolation modules 6-14
structured tools
choosing 3-7
clocked scan 3-7
LSSD 3-8
multiplexed flipflop scan 3-7
parallel scan chains 3-8
partial scan 3-8
testable
defined 7
TESTDATA
shift register and 5-19
testers
commercial -2
constraints 3-11
described 3-11
Index
19
Index
TTL/CMOS bidirectional buffers vs
contentions 12-10
testing
approaches to 5-2
ATPG considerations 11-8
chips
how done 12-2
introduction to 12-2
parallel 6-14
period slip and 12-4
TESTOUT pin 5-20
tests
costs -8
testtime costs -2
TGC1000
NAND tree configurations
illustrated 10-7
TGC2000
NAND tree configurations
illustrated 10-7
threestate disabling logic 6-12
threestate highimpedance measurements 10-11
threestate logic 12-10
threshold circuitry
adding, to circuits not adhering to IEEE Standard 1149.1 10-4
threshold drifts
circuit dc leakage current
measuring 10-13
TI Customer Design Center, contacting ix
time
test costs -2
timetomarket -3, -5, -8, 3-9
timing 1-2
BIST_AC TDL verifies requirements 4-4
checks
TDLCHKR and 4-4
FUNC_AC TDL verifies requirements 4-4
gated clocks vs edgetriggered clocks 5-8
generators
clock, strobe times and 12-3
race conditions
in edgetriggered flipflop scan designs 6-7
SCAN_AC TDL verifies requirements 4-4
TMS
boundaryscan architecture test pin 13-3
TO keywords 12-18
toggle states
required, for TDL states, for various signal files
10-3
tools
design
costs and -8
TP000
bit definitions for 8-5
macros
GTAP test registers consist of 13-20
test register composed of 8-3
test register building block
illustrated 8-3
TP0B0
test register composed of 8-3
trademarks ix
tradeoffs -2, -4, -5, -6
TRST
boundaryscan architecture test pin 13-3
truth tables 1-2
described 12-2
TST_ENBL circuit
as test activation control pin
example 13-22
TURNOFF TDL
described 4-4
TGC1000 pattern set requirements 4-5
TGC2000 pattern set requirements 4-5
U
undetectable fault
defined 8
undetected fault
defined 8
unloading
IR
shiftIR group does 13-6
updateIR group
activating IR done by 13-6
user test data register 7-5
Index
20
Index
UTDR
described 7-5
V
vendors
design process and -2
VIH/VIL and VOH/VIL test (TAP pins) 13-10
VIH/VIL and VOH/VOL test (TAP pins) 13-16
using boundaryscan architecture and GTAP
test register 13-26
VIH/VIL test 13-10
ASIC test selection codes 8-6
using boundaryscan architecture and GTAP
test register 13-23
VIH/VIL_CLK_A
ASIC test 8-6
VIH/VIL_CLK_B
ASIC test 8-6
VIH_VIL
TP000 bit assignments 8-5
VIH_VIL CLK SELECT
ASIC test selection codes 8-6
TP000 bit assignments 8-5
VIH_VIL TDL
described 4-4
input threshold voltage levels 10-4
parametric testing and 10-2
TGC1000 pattern set requirements 4-5
TGC2000 pattern set requirements 4-5
VOH/VOL test 13-10, 13-12
using boundaryscan architecture and GTAP
test register 13-23
VOL/VOH
ASIC test 8-6
voltage level measurements 10-1
input current 10-12
input threshold
using clocked NAND tree 10-4
leakage current 10-13
output 10-10
overview 10-2
threestate highimpedance 10-11
W
wafer fabrication defects
failures and 11-8
warnings
information about vi
waveform analyzers
ineffective in debugging ASIC systems -4
Williams fault coverage model -5
Motorola, Delco study supports -6
WRITE
test condition 8-8
Y
Y
TDL character 12-15
Z
Z
TDL character 12-15
Index
21
Index
Index
22
Index
Index
23
Index
Index
24
Index
Index
25
Index
Index
26
Index
Index
27
Index
Index
28
Index
Index
29
Index
Index
30
Index
Index
31
Index
Index
32
Index
Index
33
Index
Index
34
Index
Index
35
Index
Index
36
Appendix A
Glossary
A
ACE: ASIC Compiler Environment. The graphical user interface delivery
mechanism for submicron gate-array memory compiler elements.
ASIC: Application Specific Integrated Circuit. A device designed for a user
application, usually by the user.
asynchronous logic: A collection of logic elements with the signal timing
entirely dependent on the propagation delay of all elements in the signal
path. The resulting signal flow timing changes with variations in process
control, temperature, and power-supply voltage.
ASIC TDL 91: An improved TI TDL format that supports both narrow and
wide (SCAN) TDL. Narrow TDL lists the ATE state for all pins in every
cycle. Wide or SCAN TDL allows a description of only nonredundant ATE
states and pins.
ATE: Automated Test Equipment. Machines used to test silicon.
ATPG: Automatic Test Pattern Generation. A process by which the vectors
required to produce a high-fault coverage for a design are generated by
a program. These tools generally require scans in synchronous designs
and assume certain scan rules.
at-speed testing: Refers to test vectors that target the detection of delay
faults. The term usually apllies to test vectors that operate at design
frequency or that validate setup conditions.
AUTOGEN: A TI software tool that compiles an automated test equipment
program (ATE) program from TDL.
Automatic Test Pattern Generation: A methodology, using software tools,
to generate test patterns. Test patterns attempt to control and observe
each circuit node using a stuck-at model.
1
B
back annotation: The process of updating the design database with actual
interconnect delays (as opposed to estimations by design CAD software). The actual delays are calculated after placement and routing,
when exact interconnect lengths are known.
BIST: Built-In Self-Test. The capability of a product to carry out a functional
test of itself. Some support from external equipment may be required.
BIST usually involves special hardware in the product to generate input
stimuli and to analyze test responses.
block: A group of interconnected cells. May contain instances of other
blocks.
BNF: Backus Naur Form. A description of ASIC TDL 91.
BTL: Backplane Transceiver Logic. A form of transmission line driver and
receiver circuitry specified by IEEE Std 1149.1.
bus: A data distribution path that typically has multiple data receivers and
can have multiple data sources. Bus structures must be driven by threestate drivers. The drivers must be capable of disconnecting from the bus,
and only one such source can be active at one time.
bus contention: If more than one bus driver is active with conflicting output
levels at the same time, neither driver may be able to assert a true logic
level on the bus line. The result could be excessive drive current, undefined logic levels, and possible device failure.
bus holder: A logic device that prevents a bus from floating if all bus drivers
are placed into the high-impedance state. It maintains the last logic state.
C
cell: An individual component of a library (typically a logic gate; for example,
a NA210 2-input NAND gate). See macro.
CHIPS: Comprehensive Hierarchical Physical Synthesis. TI’s submicron
gate-array floorplanning tool designed to improve design cycle time by
decreasing layout iterations. Includes PRELUDE delay estimation capabilities plus full graphic floorplanning.
circuit initialization: A sequence of stimuli that sets internal nodes of a
circuit to a predictable known state.
2
Design for Testability
clock skew: The difference in clock edge timing across the chip. Loading
and interconnect capacitance cause the active clock edge to be delayed,
possibly disrupting critical circuit timing.
clocked scan: An edge-triggered scan methodology. The clocked scan flipflop has separate clock and data inputs for scan- and system-mode operation.
CMOS: Complementary Metal Oxide Semiconductor. A form of digital logic
that has the characteristics of low power consumption, wide power supply
range, and high noise immunity.
combinational fault: A functional fault whose effect on the behavior of the
circuit is not affected by the sequence of the input stimuli.
controllability: The ability of a node to be established at specific logic states
by applying stimuli to the circuit’s externally accessible nodes.
core logic: All logic functions except I/O buffers are core logic.
critical path:
Any path with special timing requirements.
CTL: CMOS Transceiver Logic. A form of transmission-line driver and receiver circuitry. These circuits allow CMOS devices to communicate in
a low-noise, terminated-transmission-line environment.
D
delay fault: A fault in a circuit that causes failure to meet ac specifications
but might not cause functional failure.
design-for-testability feature: Lets you specify a list of placement rules
describing the connectivity of any logic path you want to group.
design requirements document: A document to guide the product development that states the goals of the design. This type of document usually
includes functional description, performance goals, cost goals, testability
goals, and quality goals.
detectable fault: A functional fault for which a test pattern can be created
that always causes the effects of the fault to be observable at an externally accessible node.
detected fault: A functional fault that causes effects that are observed at
an externally accessible node when the circuit is exercised by the existing
test pattern.
Glossary
3
DFT: Design for Testability. A design goal requiring that each node be both
observable and controllable. Failure to achieve this design goal can
compromise quality assurance.
E
ECL: Emitter-Coupled Logic. A nonsaturating form of digital logic that eliminates transistor storage time as a speed-limiting characteristic, permitting very-high-speed operation.
F
fault: A defect that can cause a failure in the circuit operation/timing.
fault detectability ratio: The ratio of detectable faults to the sum of detectable and undetectable faults.
fault grade: A measurement of the efficiency of test vectors to detect manufacturing defects in silicon. The fault-grade value is usually presented
as a percentage of the stuck-at faults that can be identified using those
test vectors.
fault grading: The process of determining the test pattern fault coverage of
a circuit.
fault-tolerant design: A design approach to enhance the ability of a circuit
to remain operational after the occurrence of a fault. Fault-tolerance design techniques can impact fault detection.
floating bus: Any bus line not driven by an active device is free to assume
any voltage level. Circuits with inputs connected to this bus may draw
excessive current or otherwise malfunction.
floating input: The input of a macro can assume an undefined voltage level
if it is not driven to a defined logic level. Circuits with floating inputs can
draw excessive current or otherwise malfunction.
functional fault: A fault that causes improper logical operation of a circuit.
G
GTAP: Generic Test Access Port. The TI ASIC test controller. The GTAP can
be instructed to enable or disable any combination of DFT features.
4
Design for Testability
I
I/O: Input/Output. An input/output or bidirectional buffer cell used to connect
design interface signals directly to package pins.
ICCQ:
IDDQ:
A TI term for IDDQ. See IDDQ.
DC leakage testing looks for abnormally high VCC current that indicates a logic or process defect. Test conditions for IDDQ testing must turn
off all circuits that produce dc current in the static state.
J
JTAG: Joint Test Action Group. 1) Committee that established the test access port (TAP) and boundary-scan architecture defined in IEEE Standard 1149.1-1990. 2) Common name for IEEE Std1149.1-1990.
L
LSSD: Level-Sensitive Scan Design. A scan methodology. It is a technique
where all logic storage elements in a device are chained together in a
dual mode. The first mode is the normal operation of the device where
clocks allow the storage of data in normal system operation. In the second mode, master and slave clocks are used to shift data in and out of
the device for testing purposes.
M
MegaModule:
ter files.
High-complexity macros such as SRAMs, FIFOs, and regis-
multiplexed flip-flop scan: Multiplexed flip-flop scan design is a scan methodology. It is a technique where all logic storage elements in a device
are chained together in a dual mode. A 2:1 multiplexer is placed at the
input of the logic storage elements. The first mode is the normal operation
of the device where the multiplexer allows the storage of data in normal
system operation. In the second mode, the multiplexer allows the shifting
of data in for test purposes.
netlist: A description of a logic circuit that names the macros used and
describes their interconnection.
Glossary
5
node: The end-point of a branch in a network or a point at which two or more
branches meet.
O
observability: The ability to determine the logic states of an internal circuit
node at the circuit’s externally accessible nodes.
open circuit fault: A fault in a circuit that alters the number of nodes by
breaking a node into two or more nodes.
P
parametric fault: A fault in a circuit that causes failure to meet ac or dc
specifications but might not cause functional failure.
parametric test: These are electrical tests that evaluate parameters such
as dc and ac electrical characteristics ( VIH, IDDQ, VOH, tpd, etc. ).
PECL: Pseudo ECL. Logic that is implemented to operate with standard 5V VCC and GND power supplies.
PMT: Parallel Module Test. A system of additional logic built into MegaModules for the purpose of enhancing the testability of the circuitry. Package
input and output pins are multiplexed with internal test circuitry to minimize the need for package pins dedicated to testing.
prelayout simulation: Accomplished as part of verification that the design
meets design specifications. To be effective, simulation must include
circuit evaluation using both minimum and maximum propagation delays.
The only unknown is actual interconnect capacitance. Interconnect capacitance is estimated by the design CAD software to give an assumed
value.
R
redundant circuit: Deliberate duplication of logical functions to create backup functions that enhance performance or reliability of operation.
RTL: Register Transfer Level. A subset of behavioral modeling constructs
that can be used to model a circuit at the level of data flowing between
a set of registers. This level of abstraction typically contains little timing
information, except references to a set of clock edges and features.
6
Design for Testability
S
scan path: A shift register made up of the logic storage elements (standalone bit-storage devices). In test mode, the storage elements are connected in a shift register. During normal operation they carry out their
normal system functions. The scan path is used to shift test data into the
logic storage elements for controllability and to shift out test response
data for observability.
sequential fault: A functional fault whose effect on the behavior of the circuit
is affected by the sequence of the input stimuli.
short circuit fault: A fault in a circuit that alters the number of nodes by
connecting two or more nodes together.
simulation: The process of using workstation software to exercise a logic
design. When properly done, simulation verifies both circuit timing and
logic functionality.
state machine: A logic block that can assume any of several output logic
states in response to input stimuli. Each logic state is uniquely determined from the previous state and the previous input.
stuck-at-0 fault: A fault in a digital circuit characterized by a node remaining
at a logic low (0) state regardless of changes in input stimuli.
stuck-at-1 fault: A fault in a digital circuit characterized by a node remaining
at a logic high (1) state regardless of changes in input stimuli.
synchronous logic: Any group of logic storage elements through which the
signal flow timing is controlled by the system clock. Clock signals cause
data signals to advance from one logic storage element to the next, one
element at a time. The resulting signal flow is thus made predictable.
T
testable: An electronic circuit is testable if test patterns can be generated,
evaluated, and applied in such a way as to satisfy predefined levels of
performance defined in terms of fault-detection, fault-location, and testapplication criteria, within a predefined cost-budget and timescale.
TDL:
Test Description Language. A TI language defining test stimuli as a
series of input values and expected output values. The TDL file serves
as a source file to program the automated testers used for production
test.
Glossary
7
test pattern: A set of test vectors.
test pattern fault coverage: The ratio of the total number of detected faults
to the total number of detectable faults.
test program: A test pattern and instructions suitable for use on automated
test equipment (ATE). A test program can be used to perform functional
and parametric (ac, dc, or other) tests.
test vector: A single instance of input stimuli and expected output responses.
U
undetectable fault: A functional fault for which no set of functional test vectors can be created that can guarantee that the effects of the fault are
observable at an externally accessible node.
undetected fault: A functional fault that causes effects that are not observed
at an externally accessible node when the circuit is exercised by the
existing test pattern.
V
VCC:
Positive supply voltage or the voltage required across supply and
ground terminals of a TTL or CMOS integrated circuit
VDD:
Positive supply voltage or the voltage required across supply and VSS
terminals of a CMOS integrated circuit
VSS:
8
Ground terminal of a CMOS integrated circuit
Design for Testability