Engineering Structures 24 (2002) 227–237
www.elsevier.com/locate/engstruct
Moment–rotation model of semi-rigid connections with angles
Sang-Sup Lee, Tae-Sup Moon
*
Division of Architectural Engineering, Hanyang University, Seoul 133-791, South Korea
Received 15 December 2000; received in revised form 26 June 2001; accepted 26 June 2001
Abstract
A 2-parameter log model to describe the non-linear M–q relationship of semi-rigid connections is proposed. The proposed model
accurately describes the moment–rotation behavior of nearly all connections by controlling shape parameters a and n. To overcome
the disadvantage that the shape parameters have very little physical meaning, the semi-analytic approach that optimum values of
a and n, agreeing rather well with experimental curves, are derived in terms of initial stiffness (ki) and plastic stiffness (kp) from
statistical regression analysis is applied to this paper. The analytic formulations of ki and kp are developed for double web angle
connection and top and seat angle connection respectively. 2002 Elsevier Science Ltd. All rights reserved.
Keywords: Moment–rotation model; Semi-rigid connection; Angle connection
1. Introduction
For conventional analysis and design of a steel-framed
structure, the actual behavior of beam-to-column connections is simplified to the two idealized extremes of
either rigid-joint or pinned-joint behavior. However most
connections used in steel frames actually exhibit semirigid deformation behavior that can contribute substantially to overall force distribution in the members [1].
As such steel frame connections should be treated as
being a ‘semi-rigid frame’ for the purpose of proper
analysis and design. Accurate modeling of their
moment–rotation (M–q) relationship is necessary if the
effects of connections are to be considered in structural
analysis [2].
Because it would be prohibitively expensive to obtain
the moment–rotation relationships for all practical connection types by full-scale tests, an attractive solution is
to derive a single standardized model for each connection type. Many models have been proposed and are generally composed of parameters depending on the
strength, stiffness and ductility for a given connection
and shape parameters treated as a curve-fitting parameter. As these parameters are mainly expressed in
* Corresponding author. Tel.: +82-02-2290-0312; fax: 82-022296-4145.
E-mail address: bluemoon@email.hanyang.ac.kr (T.-S. Moon).
terms of the geometric variable, the expressions prove
to be accurate only for the limited range of data used in
regression analysis. The problem can be solved by using
the many test data, or by theoretical parametric study.
The purpose of this paper is to propose a practical
model regarding semi-rigid connections with angles that
predicts the moment–rotation characteristics by
determining two shape parameters, and to develop the
analytic formulations for evaluating the two shape parameters for double web angle connection and top and seat
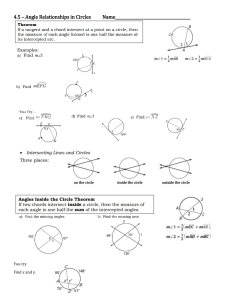
angle connection as shown in Fig. 1.
2. Modeling of connection
2.1. Connection model [3]
2.1.1. Linear model
The first attempt at using mathematical expression to
define the M–q curve dates back to Rathbun (1936). A
single tangential line to the initial slope of the M–q curve
was defined as the semi-rigid connection factor Z.
Z⫽q/M
(1)
Tarpy and Cardinal (1981), Melchers and Kaur
(1982), Lui and Chen (1983) also proposed the bilinear
models in which the initial slope of the moment–rotation
line is replaced by a shallower line at a certain transition
0141-0296/02/$ - see front matter 2002 Elsevier Science Ltd. All rights reserved.
PII: S 0 1 4 1 - 0 2 9 6 ( 0 1 ) 0 0 0 6 6 - 9
228
S.-S. Lee, T.-S. Moon / Engineering Structures 24 (2002) 227–237
Fig. 1.
Semi-rigid connections with angle. (a) Double web angle connection; (b) top and seat angle connection.
moment. Razzaq (1983) used the sophisticated piecewise
linear models represented by a series of straight line segments. Even though these linear models are easy to use,
the inaccuracies and sudden jump in stiffness at the transition points make their practical use difficult.
2.1.2. Polynomial model
A polynomial function model was proposed by
Sommer (1969) used has also been used to express
rotation in terms of moment.
q⫽C1(KM)1⫹C2(KM)3⫹C3(KM)5
(2)
where K is the standardization factor dependent upon the
connection type and geometry and C1, C2 and C3 are
curve-fitting constants. This model represents the M–q
behavior reasonably well. The main drawback is that the
nature of a polynomial is to peak and trough within a
certain range. The connection stiffness may become
negative at some values of M. This negative stiffness
may cause numerical difficulties in the analysis of frame
structures if the tangent stiffness formulation is used.
2.1.3. Power model
Richard and Abbott (1975) proposed primarily to represent the stress–strain relationship, which expresses
moment in terms of rotation as follows:
M⫽
(ki−kp)q
n
(ki−kp)q
1+
M0
冉|
|冊
⫹kpq
(1/n)
(3)
where:
ki
kp
M0
n
is
is
is
is
the
the
the
the
initial slope of connection
strain hardening slope of connection
reference moment
shape parameter
One advantage of the Richard–Abbott function over the
Ramberg–Osgood function is that whereas the former
permits positive, zero, and negative values of kp, the latter permits only a zero value.
Ang and Morris (1984) followed the same procedure
but used the Ramberg–Osgood (1943) function to
express the standardized moment–rotation behavior in
the following form:
再 冋 册 冎
q (KM)
KM
⫽
1⫹
q0 (KM)0
(KM)0
(n−1)
(4)
where q0, (KM)0, n are constants that define shape of
function, K is the standardization constant dependent on
the connection type and geometry. Depending upon the
value of n, the shape of the curve changes, allowing one
to model a sharp ‘knee’-type M–q curve or one with a
long, gradual decreasing slope. The Ramberg–Osgood
function has the advantage that its derivative, hence the
slope of the M–q curve, does not fluctuate in value contrary to the inherent oscillatory nature of polynomials.
2.1.4. Exponential model
Lui and Chen (1986) proposed the multi-parameter
exponential model.
冘冋
m
冉 冊册
|q|
Cj 1⫺exp ⫺
2ja
j⫽1
M⫽
⫹M0⫹Rkf|q|
(5)
where M0 is the starting value of the connection moment
to which the curve is fitted, Rkf is the strain-hardening
stiffness of the connection, a is a scaling factor, and Cj is
a curve-fitting constant obtained from a linear regression
analysis. This model gives as good a curve-fitting to test
data as that of the cubic B-spline model. However, if
there is a sharp change in slope in the M–q curve, this
model cannot represent it adequately.
Kishi and Chen (1986) refined the Lui and Chen
exponential model to accommodate any sharp change in
slope in the M–q curve as follows
冘冋
m
冉 冊册 冘
|q|
Cj 1⫺exp ⫺
2ja
j⫽1
M⫽M0⫹
n
⫹
Dk(q⫺qk)H[q
(6)
k⫽1
⫺qk]
where M0 and a are defined as in Eq. (5) and Dk is a
constant parameter for the linear portion of the curve, qk
S.-S. Lee, T.-S. Moon / Engineering Structures 24 (2002) 227–237
is the starting rotation of the linear component of the
curve, H[q] is Heaviside’s step function (unity for qⱖ
0, zero for q⬍0) and Cj and Dk and curve-fitting constants obtained from a linear regression analysis.
Although this model can deal with connection loading
and unloading for the full range of relative rotation in a
second-order structural analysis with secant connection
stiffness, it is not manageable.
2.2. Modeling of M–q curve
Using the two shape parameters a and n, the model
to represent the moment–rotation relationship of semirigid connections is proposed as follows
M⫽aln(n·103·q⫹1)n
Fig. 2.
moment and the shape parameter n governs an the entire
shape of a curve.
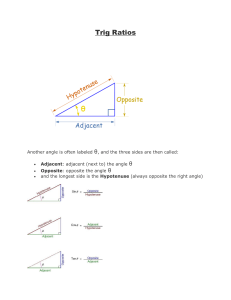
Hence, this log model is found suitable and adjustable
for the representation of the various connection
behaviors connection. As can be observed in Fig. 3, the
proposed model gives a good curve-fitting with test data
selected in the database (SCDB; The Steel Connection
Data Bank program) by Kishi and Chen (1986) [3]. And
this model can be easily applied to the second-order
frame analysis with semi-rigid connection because the
tangent stiffness (kt) can be determined directly from Eq.
(8) without iteration.
dM
n·103
(8)
kt⫽ ⫽n·a[ln(n·103·q⫹1)]n−1·
dq
n·103+1
(7)
where a and n are shape parameter which are determined
by using the method of least squares for differences
between the predicted moments and the experimental
test data.
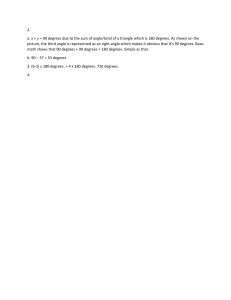
This log model has the properties that the larger the
index n, the more linear the curve, and the smaller, the
flatter as shown in Fig. 2(a)–(c). For example, the curve
is nearly akin to the linear behavior in that n equals 3.0
and shows the general M–q behavior in the case of
n=1.0. Otherwise, if n is 0.1, the curve is characterized
by bilinear behavior. For constant values of a, the plotting of Eq. (7) for different values of n is shown in Fig.
2(d). Consequently, it can be argued that the shape parameter a has an effect upon initial stiffness and ultimate
229
Fig. 3. Comparison of curve-fitting curves and test curves.
Characteristic of shape parameters. (a) n=3; (b) n=1; (c) n=0.01; (d) sensitivity of n
230
S.-S. Lee, T.-S. Moon / Engineering Structures 24 (2002) 227–237
2.3. Study of model parameters
⫽0.91)
As described above, it can be seen that the proposed
model represents a close fit with the experimental tests
by controlling a and n only. While other models are
expressed in terms of stiffness, strength, and standardization factor etc, the proposed model has no such parameters. This fact could be a demerit that the parameters
a and n in this log model have very little physical meaning. On the other hand, it can be offset by simplicity and
accuracy that this model requires only two parameters
and can provide a good fit with various connection M–
q curves.
Some parameters of most models have a form of function derived theoretically, and the others are determined
by using the statistical analysis for experimental test
data. The accuracy of those models is under the influence
of the number of data used, and the availability has the
limited type of connection M–q curve.
To overcome these disadvantages, the approach that
the optimum values of a and n, agreeing rather well with
experimental curves, are derived in terms of initial stiffness (ki) and plastic stiffness (kp) from statistical
regression analysis is applied to this paper.
a⫽f(ki,kp)
(9a)
n⫽f(ki,kp)
(9b)
The ultimate moment is excluded from Eqs. (9a) and
(9b), because most M–q curves of top and seat angle
connections and double web angle connections exhibit
elastic-plastic hardening characteristics and do not flatten out near the final state of loading.
To express a and n as a function of ki and kp, a total
of 75 experimental data were used for the derivation of
Eqs. (10a, 10b, 11a) and (11b). A set of 50 double web
angle connections and a set of 25 top and seat angle
connections are employed. These experimental data were
selected from database collected by Kishi and Chen. A
simple statistical regression analysis on shape parameters is carried out along with ki and kp. The
expressions of a and n, representing double web angle
connections, are statistically analyzed and regressed to
a plane equation are shown in Fig. 4.
a⫽1.499E⫺03·ki⫹1.449E⫺03·kp⫹0.704 (R2
(10a)
⫽0.83)
n⫽⫺3.594E⫺05·ki⫺3.496E⫺05·kp⫹1.170 (R2
(10b)
⫽0.80)
Similarly, the expressions of shape parameters of top
and seat angle connections are statistically analyzed and
plotted in Fig. 5. The a and n can be expressed as
a⫽9.689E⫺0.4·ki⫹9.562E⫺04·kp⫹3.850 (R2
(11a)
n⫽4.500E⫺06·ki⫹4.400E⫺06·kp⫹0.601 (R2
(11b)
⫽0.92)
where R2 is correlation factor and the unit of ki (kp) is
kN·m.
3. Behavior of angle segment
If the initial stiffness and the plastic stiffness could
be determined analytically, the prediction of the M–q
relationship from the proposed model can be made independent of experiment. In order to determine ki and kp,
the load–deformation (P–⌬) the behavior of angle segment in tension needs to be examined first of all.
The behavior of angle segment will be analyzed for
the two states as follows
1. Elastic state
2. Plastic state in which the collapse mechanism is
developed
The basic assumptions for analyzing are as follows.
1. Deformation of connection is small.
2. Deformation of beam and column is negligible compared with the deformation of connection.
3. The slip deformation is negligible.
3.1. Pe–⌬e relationship in elastic state
The assembly angles of connection can be simplified
as shown in Fig. 6(a). It is assumed that the fasteners
hold the angle legs fixed at points A and C. Point C
moves downward only because of symmetry, and the
rotation at B is the same in both legs as a result of continuity. If the angle is temporarily free to translate and
rotate at C in Fig. 6(c), the moment (Me) and the horizontal load (He) contribute to the deformation of point
C: (1) vertical displacement (⌬v); (2) horizontal displacement (⌬h); (3) rotation (q). As the situation of point C
is actually a fixed restraint, there is no horizontal displacement or rotation. Therefore, the boundary conditions are
⌺⌬h⫽⌬h(Pe)⫹⌬h(He)⫹⌬h(Me)⫽0
(12a)
⌺qr⫽qr(Pe)⫹qr(He)⫹qr(Me)⫽0
(12b)
⌺⌬v⫽⌬v(Pe)⫹⌬v(He)⫹⌬v(Me)⫽⌬e
(12c)
As the angles shown in Fig. 6(b) are pulled out in an
initial elastic state, it is assumed that the fixed support
at point A is the first fastener-nut edge in the leg adjacent
to the column face and the concentrated load Pe acts at
S.-S. Lee, T.-S. Moon / Engineering Structures 24 (2002) 227–237
Fig. 6.
Fig. 4.
Statistical regression analysis on double web angle connections.
Fig. 5.
Statistical regression analysis on top and seat angle connections.
Angle segment in elastic state. (a) Double angle segment; (b) modeling; (c) free body diagram.
the center of fastener holes in the leg adjacent to the
beam web face because of the higher restraint caused by
clamping action [4].
Based on these assumptions and using various elastic
theories, boundary conditions with respect to material
and geometrical properties can be rewritten
冉
231
冊 冉
冊
He
g32 Me
g22
Pe
g1g22⫹ ⫺
g1g2⫹ ⫽0
⫺ (g21g2)⫹
EI
EI
3
EI
2
(12aa)
冉冊
冉冊 冉 冊 冉冊
Pe g21 He
Me
⫺ (g1g2⫹g22)⫹ (g1⫹g2)⫽0
EI 2
EI
EI
(12bb)
Pe g21 He g21g2 Me g21
⫺
⫹
⫽⌬e
EI 3
EI 2
EI 2
(12cc)
where:
g1
distance from the leg’s center line to the first
fastener-nut edge in leg adjacent to the column
232
S.-S. Lee, T.-S. Moon / Engineering Structures 24 (2002) 227–237
Fig. 7.
g2
EI
Angle segment in elastic state. (a) Mechanism of double angles; (b) location of plastic hinges; (c) deformed configuration.
distance from the leg’s center line to the center
of fastener holes in leg adjacent to the beam
bending stiffness of angle segment per unit
length.
Solving the simultaneous equation Eqs. (12aa, 12bb)
makes it possible to determine the relative magnitude of
He and Me. Substituting He and Me solved for Pe into
Eqs. (12cc), the load–deformation (Pe–⌬e) of angle segment in elastic state can be obtained as
冉 冊
12EI g1+g2
·⌬
Pe⫽ 3
g1 g1+4g2 e
(13)
3.2. Pp–dp relationship in plastic state
The comprehensive experiments showed that there was
a significant difference in behavior of angles with different mechanisms.
In this state, the geometrical changes of angles are
large compared to the restrained lengths of the angle
legs. Therefore, it is necessary that the deformed shape
of angles be known or at least closely approximated so
that the locations of hinges can be determined. Figs. 8
and 9 shows the deformed configuration of angle consistent with vertical deformation ⌬p. It is assumed that the
angle segment behaves in the following manner.
1. As the plastic hinge at point B is formed, the A–B
part rotates as a rigid body around the base at A.
2. As the plastic hinge at point C is formed, the C–D
part rotates as a rigid body around the base at D.
3. The heel of angle (fillet) does not deform.
As observed in Fig. 3, the behavior of connections has
a transition between the elastic state and plastic state [5].
The load–deformation relationship in transition state is
not treated here because kp is necessary to be determined
in plastic state in which the collapse mechanism is
developed. As the angles are pulled out still more, the
plastic hinges will be formed at point A primarily, and
then point B and point C simultaneously. Usually, point
A is the edge of the first fastener-nut in the leg adjacent
to the column face and the points B and C are in the
vicinity of the two intersections of the fillet and the angle
legs as shown in Fig. 7. However, point A has a
migration toward the angle’s toe that is caused by a snug
tight fastener and relatively thicker angle (Fig. 8) [6].
Fig. 8.
Migration of plastic hinge. (a) Mode 1; (b) Mode 2.
Fig. 9.
Detail of angle configuration in plastic state.
S.-S. Lee, T.-S. Moon / Engineering Structures 24 (2002) 227–237
By equating the moment at these points to the plastic
moment, the equilibrium equation is
冦
冧
g3(冑g23+⌬2p−g3)
g3·⌬p
⫹Mp⫹Hp· 2 2⫽
⫺Pp· g3⫺
2
2
冑g3+⌬p
冑g3+⌬p
冦冢 冣
g3
冑g +⌬
2
3
2
p
·g2−
冑
冑g +⌬
g3( g23+⌬2p−g3)
2
3
2
p
冧
(14)
4.1.1. Initial stiffness (ki)
Typical double web angle connection is shown in Fig.
1(a). In the initial elastic state, it is assumed that there
is no slip and that the leg of angle adjacent to the column
behaves linearly elastic, while the leg of angle adjacent
to the beam behaves as a rigid body [7]. Since the higher
restraint between the angle and the column face arises
from the clamping action of bolts, it is assumed that the
full length of the angle can resist the bending moment.
The center of rotation is close to the mid-length of the
connection [8]. Using the Pe–⌬e relationship of angle
segment in Eq. (13) and the load distribution as shown
in Fig. 10, the relationship between the moment M and
the rotation q is obtained as
+Mp
(at point C)
冦
冢 冣冧
g3
+Hp· g1−g3+⌬p+ 1−
冑g +⌬
2
3
2
p
·g2 =−Mp
M⫽2⫻
(15)
where:
g1
distance from the leg’s center line to the plastic
hinge (point A) in leg adjacent to the column
distance from the leg’s center line to the first
fastener-nut edge in leg adjacent to the beam
distance from the toe of fillet to the plastic hinge
(point A) in leg adjacent to the column
plastic moment (=t2a·sy/4 (ta: thickness of angle
and sy: yield strength of angle)
g2
g3
Mp
For the purpose of simplification, the higher-order
terms (⌬3p…) are neglected and the expression in Eq. (16)
is used.
冑g +⌬ ⬇g ·
2
3
2
p
3
冋 冉 冊册
1 ⌬p
1⫹
2 g3
4. Determination of initial stiffness and plastic
stiffness
4.1. Double web angle connection (all bolted)
⫺Mp (at point B)
−Pp· g1− 1−
233
2
(16)
冉
冊冉 冊 冉 冊
1
4
0.5la
·q
Pe·0.5la · ·0.5la ⫻
2
3
⌬e
(18)
where la: the length of angle
Consequently, initial stiffness ki is given by
冉 冊
2EI g1+g2 3
·l
ki⫽ 3
g1 g1+4g2 a
(19)
4.1.2. Plastic stiffness (kp)
According to experimental results reported by Lewitt
et al. [8], it can be seen that the plastification of angle
takes place perfectly at ⌬p=5.08 mm (0.2 in) and the
center of rotation has been assumed to be at 0.8 of the
length of angle. This actually varied with the value of
⌬p, the center of rotation is conservatively determined
to be at 0.8la in this paper. As the moment increases, the
load distribution in the length of angle has a tendency
to be concentrated on bolts [9]. Therefore it is assumed
that the total tension force in connection angle is the sum
of the product of the applied load(F1,…, Fn) and diameter of the nut(Dnut). Assuming the deformation of angle
is proportional to the distance from the center of rotation
Eliminating Hp from Eqs. (14) and (15) and then using
the Pp–⌬p relationship it can be shown that
Pp
⫽
再
再
1
2Mp (g1−g3)(g23+⌬2p)+ g2⌬2p
2
冉
冊 冉
冎
1
1
g3(g1−g3) g23+ ⌬2p +g3⌬p g2⌬p−g1g3+g23
2
2
(17)
冊冎
Fig. 10. Force distribution of double web angle in elastic state.
234
S.-S. Lee, T.-S. Moon / Engineering Structures 24 (2002) 227–237
Fig. 11.
Force distribution of double web angle in plastic state.
as shown in Fig. 11, the relationship between the
moment M and the rotation q is obtained as
冉冘
冉 冊
M⫽2⫻
⫻
冊冉
li
⌺l
·Pp·Dmit ⫻
⫹0.1la
0.8l
⌺li
a
i⫽1
n
2
i
冊
(20)
0.8la
·q
⌬p
where:
li
Dnut
Distance from the center of rotation to the each
center of fastener
Diameter of the nut
Finally, plastic stiffness kp is given by
kp⫽
4Mp兵(g1−g3)(g23+⌬2p)+0.5g2⌬2p其·Dmit
·(⌺l2i
{g3(g1−g3)(g23+0.5⌬2p)+g3⌬p(0.5g2⌬p−g1g3+g23)}
(21)
1
⫹0.1la·⌺li)·
⌬p
where ⌬p=5.08 mm
because the dimension properties and material strength
are available.
The parameters used in each test and the comparison
of analytical and experimental initial stiffness is listed
in Table 1. As shown in Table 2, the prediction of plastic
stiffness is relatively accurate, and hence a good
relationship of M–q can be expected.
Finally, substituting ki and kp calculated from Eqs.
(19) and (21) into Eqs. (10a) and (10b), the shape parameters a and n can be easily obtained. Fig. 12 illustrates
that the proposed model gives a good curve-fitting with
test curve.
4.2. Top and seat angle connection (all riveted)
4.2.1. Initial stiffness (ki)
Typical top and seat angle connection is shown in Fig.
1(b). Based on previous assumptions that were made for
analyzing behavior of angles, the initial stiffness can be
obtained from simple elastic theory. The top angle provides resistance to the bending moment, in which the
fixed support is assumed to be in the vicinity of the rivethead edge in the leg adjacent to the column. Because
the clamping force of the rivet is lower than that of the
bolt, it is assumed that the effective length (diameter of
rivet-head×number of rivet) can resist the bending
moment. The center of rotation for the connection is
located at the leg adjacent to the compression-beam
flange at the end of the beam as shown in Fig. 13 [10].
Similarly, using these assumptions and the Pe–⌬e
relationship of angle segment in Eq. (13), the relationship between the moment M and the rotation q is
obtained as
M⫽(Pe·le)⫻(db⫹g1)⫻
4.1.3. Comparison of analytical and experimental
results
For the purpose of comparison of the analytical ki and
kp with the ki and kp measured from a test curve, the six
test data from SCDB are employed [3]. One bolted test
conducted by Lewitt, one bolted test conducted by Bose
and five bolted tests reported by Thompson are selected
冉冊
db
·q
⌬e
(22)
where:
le
db
Effective length of top angle.
Depth of beam
Table 1
Comparison of analytic and curve-fitting initial stiffness (double web angle connection)
Test ID
g1 (mm)
g2 (mm)
g3 (mm)
ta (mm)
Dnut (mm)
la (mm)
E (N/mm2)
ki(anal.)
(kN·m/rad)
ki(fitting)
(kN·m/rad)
ki(anal.)/ki
(fitting)
FK4AB-M
B-1
A1-2 ALT
B1-2 ALT
D1-2 ALT
E1-3 ALT
A2-3 ALT
38.32
52.95
44.93
42.55
25.88
39.37
44.93
84.14
82.50
37.31
34.93
37.31
34.93
37.31
20.83
31.87
29.85
25.08
10.80
21.91
29.85
9.53
15.00
7.94
12.70
7.94
12.70
7.94
31.75
31.75
31.75
31.75
31.75
31.75
31.75
292.10
400.00
292.10
292.10
292.10
292.10
292.10
2.06E+05
2.06E+05
2.06E+08
2.06E+05
2.06E+05
2.06E+05
2.06E+08
4293.03
17669.13
1996.21
9672.58
8909.51
11913.81
1998.26
5503.21
17349.86
2002.74
9768.32
8571.32
11563.58
2014.17
0.78
1.02
0.99
0.99
1.04
1.03
0.99
S.-S. Lee, T.-S. Moon / Engineering Structures 24 (2002) 227–237
235
Table 2
Comparison of analytic and curve-fitting plastic stiffness (double web angle connection)
Test ID
g1 (mm)
g2 (mm)
g3 (mm)
Number db (mm)
of bolt
sy (N/mm2) ⌬p (mm)
kp(anal.)
(kN·m/rad)
kp(fitting)
(kN·m/rad)
kp(anal.)/
kp(fitting)
FK4AB-M
B-1
A1-2 ALT
B1-2 ALT
D1-2 ALT
E1-3 ALT
A2-3 ALT
57.37
37.07
76.68
74.30
57.63
55.25
76.68
36.51
36.62
37.31
34.93
37.31
34.93
37.31
39.88
16.00
61.60
56.83
42.55
37.78
61.60
4
5
4
4
4
4
4
286.3644
344.2257
247.8415
247.8415
247.8415
247.8415
344.2257
327.05
6496.30
120.97
338.58
182.42
535.40
168.13
300.63
5843.02
129.29
322.51
174.56
482.83
172.98
1.09
1.11
0.94
1.05
1.05
1.11
0.97
456.95
456.95
533.15
533.15
533.15
533.15
533.15
5.08
5.08
5.08
5.08
5.08
5.08
5.08
Fig. 13. Force distribution of top and seat angle in elastic state.
Consequently, initial stiffness ki is given by
冉 冊
12EI g1+g2
·l ·(d ⫹g )
ki⫽ 3
g1 g1+4g2 e b 1
Fig. 12. Comparison of predicted results with experimental results
(DWA connection).
(23)
4.2.2. Plastic stiffness (kp)
As the moment increases, the plastic hinges are formed at the critical location of top angle. In cases the
angle is thick or the g3 is rather short compared to the
part of fillet, the plastic hinge of point A in Fig. 8 may
be developed at the rivet-head edge near the toe of the
angle. Therefore, it is necessary that the values of g1 and
Table 3
Comparison of analytic and curve-fitting initial stiffness (top and seat angle connection)
Test ID
g1 (mm)
g2 (mm)
g3 (mm)
ta (mm)
Hrivet (mm)
Number le (mm)
of rivet
db (mm) ki(anal.)
(kN·m/rad)
ki(fitting)
(kN·m/rad)
ki(anal.)/
ki(fitting)
No.2
No.5
No.9
No.10
No.20
No.22
No.24
41.24
42.83
41.24
39.65
41.24
41.24
38.91
58.76
60.35
58.76
57.18
58.76
58.76
60.31
20.60
23.78
20.60
17.43
20.60
20.60
18.28
15.88
12.70
15.88
19.05
15.88
15.88
15.88
28.65
28.65
28.65
28.65
28.65
28.65
33.30
2
2
2
2
2
2
2
310.39
458.72
458.72
458.72
355.09
406.65
458.72
25297.85
26572.30
53669.10
102450.24
34279.93
44229.51
76343.07
1.05
0.97
1.04
1.05
1.00
1.00
0.99
57.30
57.30
57.30
57.30
57.30
57.30
66.60
26594.90
25704.32
55885.75
107958.84
34293.39
44382.42
75297.11
236
S.-S. Lee, T.-S. Moon / Engineering Structures 24 (2002) 227–237
meters a and n can be easily obtained. The proposed
model gives a good curve-fitting with test curve as
shown in Fig. 15.
5. Summary and conclusions
In this paper, a practical model is proposed to represent the moment–rotation relationship of semi-rigid
connection and the proposed model is simple to use and
accurately describes the moment–rotation behavior of
Fig. 14.
Force distribution of top and seat angle in plastic state.
g3 are adequately modified. In plastic state in Fig. 14,
the center of rotation keeps location in initial elastic
state. Again based on the Pp–⌬p relationship of angle
segment in Eq. (17), the relationship between the
moment M and the rotation q is derived as
M⫽(Pp·le)⫻(db⫹g1)⫻
冉冊
db
·q
⌬e
(24)
Finally, plastic stiffness kp is given by
kp⫽
2Mp{(g1−g3)(g23+⌬2p)+0.5g2⌬2p}
db
·l (d ⫹g )·
{g3(g1−g3)(g23+0.5⌬2p)+g3⌬p(0.5g2⌬p−g1g3+g23)} e b 1 ⌬p
(25)
where ⌬p=5.08 mm
4.2.3. Comparison of analytical and experimental
results
To compare the analytical ki and kp with the ki and kp
measured from a test curve, 12 riveted tests conducted
by Hechtman are selected in the present comparison
because the dimension properties and material strength
can be available from SCDB [3]. Similarly, the parameters used in each test and the comparison of analytical
and curve-fitting ki are listed in Table 3. The analytical
plastic stiffness agrees in general with the experimental
values as shown in Table 4.
Eventually, substituting ki and kp calculated from Eqs.
(23) and (25) into Eqs. (11a) and (11b), the shape para-
Fig. 15. Comparison of predicted results with experimental results
(TSA connection).
Table 4
Comparison of analytic and curve-fitting plastic stiffness (top and seat angle connection)
Test ID
g1 (mm)
g2 (mm)
g3 (mm)
ta (mm)
le (mm)
db (mm)
sy
⌬p (mm) kp(anal.)
(kN·m/rad)
(N/mm2)
kp(fitting)
(kN·m/rad)
kp(anal.)/
kp(fitting)
No.2
No.5
No.9
No.10
No.20
No.22
No.24
65.11
66.70
65.11
63.53
65.11
65.11
66.66
39.66
41.25
39.66
38.08
39.66
39.66
38.11
44.48
47.65
44.48
41.30
44.48
44.48
46.03
15.88
12.70
15.88
19.05
15.88
15.88
15.88
57.30
57.30
57.30
57.30
57.30
57.30
66.60
310.39
458.72
458.72
458.72
355.09
406.65
458.72
258.22
258.22
258.22
258.22
258.22
258.22
258.22
1075.08
1417.89
2269.88
3076.13
1462.23
1816.87
2443.18
1.01
0.94
0.99
1.14
0.95
0.99
1.03
5.08
5.08
5.08
5.08
5.08
5.08
5.08
1087.37
1331.25
2241.86
3502.24
1392.07
1789.83
2514.84
S.-S. Lee, T.-S. Moon / Engineering Structures 24 (2002) 227–237
nearly all connections by controlling shape parameter a
and n. It introduces a semi-analytic procedure that the
optimum values of a and n, agreeing rather well with
experimental curves, are described as a function of initial
stiffness (ki) and plastic stiffness (kp) from statistical
regression analysis. Herein, the initial stiffness (ki) and
plastic stiffness (kp) of double web angle connection and
top and seat angle connection are derived analytically
and the analytical results agree in general with the
experimental values. It is difficult to apply Eqs. (10a,
10b, 11a) and (11b) to all angles used in practice because
not all the geometry and material properties of angles
are considered in this study. However, the proposed
model and semi-analytical procedure will be a very
effective tool for designers to execute the frame analysis
with semi-rigid connections.
Acknowledgements
The financial assistance of STRESS (advanced STructure RESearch Station) of KOSEF(KOrea Science and
Engineering Foundation), Hanyang University is
appreciated.
237
References
[1] Attiogbe E, Morris G. Moment–rotation functions for steel connections. J Struct Engng ASCE 1991;117(6):1703–18.
[2] Kishi N, Chen WF. Moment–rotation relations of semi-rigid connections with angles. J Struct Engng ASCE 1990;116(7):1813–
34.
[3] Chen WF, Toma S. Advanced analysis of steel frames. Boca
Raton (FL): CRC Press, 1994.
[4] Yee YE, Melchers RE. Moment–rotation curves for bolted connections. J Struct Engng ASCE 1986;112(3):615–35.
[5] Colson A, Louveau JM. Connections incidence on the inelastic
behavior of steel structures. Euromech Colloquium
1983;174(Oct).
[6] Fleischman RB, Chasten CP, Lu LW, Driscoll GC. Top and seat
angle connection and end-plate connections: snug vs. fully pretensioned bolts. Eng J AISC 1991;First quarter:18–28.
[7] Wu FH, Chen WF. A design model for semi-rigid connections.
Eng Struct 1990;12;12:88–97.
[8] Lewitt CW, Chesson E Jr, Munse W. Restraint characteristics of
flexible riveted and bolted beam to column connections. Bulletin
No.500, Urbana: Engineering Experiment Station, University of
Illinois, January, 1969.
[9] Sherbourne AN, Bahaari MR. Finite element prediction of end
plate bolted connection behavior. II: analytic formulation, J Struct
Eng ASCE 1997;123(2):269–81.
[10] Chen WF, Lui EM. Stability design of steel frames. Boca Raton
(FL): CRC Press, 1991.