Supplementary Material for:
Modeling spatial processes with unknown
extremal dependence class
Raphaël G. Huser
CEMSE Division, King Abdullah University of Science and Technology
and
Jennifer L. Wadsworth
Department of Mathematics and Statistics, Lancaster University
May 30, 2018
1
Proofs
Proof of Proposition 1.
P(Xj > x, Xk > x) = P(Wj > x1/(1−δ) R−δ/(1−δ) , Wk > x1/(1−δ) R−δ/(1−δ) )
= P(Wj > S, Wk > S),
where S = x1/(1−δ) R−δ/(1−δ) , so that S has support (0, x1/(1−δ) ), and Lebesgue density fS (s) =
1−δ (1−δ)/δ−1 −1/δ
s
x
on this interval. Using assumption (3), we have
δ
1 − δ −1/δ
P(Wj > S, Wk > S) =
x
δ
= x−1/δ +
Z
1
s
(1−δ)/δ−1
0
1 − δ −1/δ
x
δ
Z
1 − δ −1/δ
ds +
x
δ
Z
x1/(1−δ)
LW (s)s(1−δ)/δ−1/ηW −1 ds
1
x1/(1−δ)
LW (s)s(1−δ)/δ−1/ηW −1 ds.
1
R x1/(1−δ)
Consider the behavior of 1
LW (s)s(1−δ)/δ−1/ηW −1 ds, which is convergent since we
have a well defined probability. We will apply Karamata’s Theorem (Resnick, 2007, Theorem
2.1) and so distinguish between the cases when the index of regular variation is R −1. The
notation g ∈ RVρ denotes that a function g is regularly varying at infinity with index ρ ∈ R.
1: (1 − δ)/δ − 1/ηW − 1 ≥ −1 i.e., ηW ≥ δ/(1 − δ). By Karamata’s Theorem
RCase
x
L(s)sθ ds ∈ RVθ+1 when θ ≥ −1. Thus
1
Z
x1/(1−δ)
LW (s)s(1−δ)/δ−1/ηW −1 ds = L̃(x)x1/δ−1/{ηW (1−δ)} ,
1
1
where L̃ is a new SV function, using also a result on composition of regularly varying functions
(Resnick, 2007, Prop. 2.6 (iv)). Overall in Case 1 we thus have
P(Xj > x, Xk > x) = L(x)x−1/{ηW (1−δ)} ,
for some slowly varying function L, noting that terms of order x−1/δ are absorbed into L
when ηW > δ/(1 − δ).
2: (1 − δ)/δ − 1/ηW − 1 < −1 i.e., ηW < δ/(1 − δ). By Karamata’s Theorem
RCase
∞
θ
L(s)s
ds ∈ RVθ+1 when θ < −1. We have
x
Z
x1/(1−δ)
LW (s)s
(1−δ)/δ−1/ηW −1
∞
Z
ds =
LW (s)s
1
(1−δ)/δ−1/ηW −1
Z
∞
ds −
LW (s)s(1−δ)/δ−1/ηW −1 ds,
x1/(1−δ)
1
(1)
and so the second term on the right-hand side the is regularly varying of index 1/δ−1/{ηW (1−
δ)}. The first term on the right-hand side of expression (1) is established by noting that
(1−δ)/δ
E{min(Wj , Wk )
Z
∞
P{min(Wj , Wk )(1−δ)/δ > t} dt
0
Z
Z ∞
1−δ ∞
δ/(1−δ) −δ/{ηW (1−δ)}
LW (s)s(1−δ)/δ−1/ηW −1 ds.
LW {t
}t
dt = 1 +
=1+
δ
1
1
}=
Overall in Case 2 we thus have
P(Xj > x, Xk > x) = E{min(Wj , Wk )(1−δ)/δ }x−1/δ − L(x)x−1/{ηW (1−δ)}
= E{min(Wj , Wk )(1−δ)/δ }x−1/δ {1 + o(1)},
since ηW (1 − δ) < δ.
Proof of Corollary 1. Since X has common margins and upper endpoint infinity, the extremal dependence class is determined by the limit
P(Xj > x, Xk > x)
.
x→∞
P(Xj > x)
χ = lim
If δ > 1/2: Then P(Xj > x) ∼
and
δ
x−1/δ .
2δ−1
We have δ/(1 − δ) > 1 so we must be in Case 2,
χ = E{min(Wj , Wk )(1−δ)/δ }
2δ − 1
> 0,
δ
with expression (10) following as
(1−δ)/δ
E{Wj
}
Z
=
∞
w(1−δ)/δ−2 dw =
1
2
δ
.
2δ − 1
(2)
If δ = 1/2: Consider the relation (8), and note that since P(Xj > x)−1 is regularly varying
with limit infinity, then the composition LX {P(Xj > x)−1 } =: L∗ (x) is slowly varying at
infinity; cf. Resnick (2007, Prop. 2.6(iv)). For δ = 1/2, we have
P(Xj > x) = x−2 {2 log(x) + 1},
P(Xj > x, Xk > x) = E{min(Wj , Wk )}x−2 {1 + o(1)},
since ηW < 1 by assumption, which puts us in Case 2. We thus have
P(Xj > x, Xk > x) = L∗ (x)P(Xj > x),
so that ηX = 1 and
L∗ (x) ∼
E{min(Wj , Wk )}
→ 0, x → ∞.
{2 log(x) + 1}
1−δ −1/(1−δ)
x
. If ηW ≥ δ/(1 − δ) then we are in Case 1 and
If δ < 1/2 Then P(Xj > x) ∼ 1−2δ
−1/{ηW (1−δ)}
the survivor function is L(x)x
. Otherwise if ηW < δ/(1 − δ) we are in Case 2 and
−1/δ
the survivor function decays like x
. In both cases this leads to χ = 0 with coefficient of
tail dependence,
(
δ/(1 − δ) if ηW < δ/(1 − δ)
ηX =
ηW
otherwise.
During the proofs of Propositions 2 and 3, we will need results on the quantile function
q(t) := FX−1 {1 − 1/t}, which we give in the following Lemma.
Lemma 1. For δ > 1/2, the marginal quantile function q(t) = FX−1 (1 − 1/t) satisfies
#
δ "
(1−2δ)/(1−δ)
δ
δ
δ
(1−2δ)/(1−δ)
t 1 − (1 − δ)
t
{1 + o(1)} , t → ∞.
q(t) =
2δ − 1
2δ − 1
Proof. The quantile function is obtained by solving 1 − FX {q(t)} = t−1 , which leads to
δ
1−δ
−1/δ
(1−2δ)/{δ(1−δ)}
q(t)
1−
q(t)
= t−1
2δ − 1
δ
and thus
−δ δ
1−δ
δ
(1−2δ)/{δ(1−δ)}
q(t) 1 −
q(t)
=
tδ .
δ
2δ − 1
(3)
Since q(t) → ∞ as t → ∞, and (1 − 2δ)/{δ(1 − δ)} < 0 for δ > 1/2, expression (3) leads to
q(t) =
δ
2δ − 1
δ
tδ {1 + o(1)},
which can be fed back into (3) to give the result claimed.
3
t → ∞,
Proof of Proposition 2. When δ > 1/2, the exponent function V (x1 , . . . , xd ) is obtained from
the limit
V (x1 , . . . , xd ) = lim t(1 − P[X1 ≤ FX−1 {1 − (tx1 )−1 }, . . . , X1 ≤ FX−1 {1 − (txd )−1 }]).
t→∞
δ
δ
2δ−1
(tx)δ {1 + o(1)}, and so
Xj
1 − P{X1 ≤ q(tx1 ), . . . , X1 ≤ q(txd )} = P max
>1
j=1,...,d q(txj )
"
#
Rδ Wj1−δ
= P max
>1
δ
δ
j=1,...,d
δ {1 + o(1)}
(tx
)
j
2δ−1
#
Z 1 "
(1−δ)/δ
Wj
P max
> tu du
=
δ
j=1,...,d
xj {1 + o(1)}
0
2δ−1
"
#
Z
(1−δ)/δ
Wj
1 t
=
P max
> z dz.
δ
j=1,...,d
t 0
xj {1 + o(1)}
2δ−1
(1−δ)/δ
Wj
For sufficiently large t, an integrable function of the form P K maxj=1,...,d δ x > z ,
( 2δ−1 ) j
1 < K < ∞, dominates the integrand over (0, ∞) and thus the above integral tends to
)
(
)
Z ∞ (
(1−δ)/δ
(1−δ)/δ
Wj
Wj
2δ − 1
> z dz = E max
P max
,
δ
j=1,...,d
j=1,...,d
xj
δ
xj
0
2δ−1
Using Lemma 1, we have q(tx) =
and hence
(
lim t[1 − P{X1 ≤ q(tx1 ), . . . , Xd ≤ q(txd )}] = E
(1−δ)/δ
max
t→∞
j=1,...,d
"
=E
max
j=1,...,d
Wj
)
(1−δ)/δ
2δ − 1
δ
#
(1−δ)/δ
,
xj
Wj
E{Wj
}xj
the final line following by equation (2).
Proof of Proposition 3. The function
χu = P{FX (Xj ) > u | FX (Xk ) > u} =
P{Xj > FX−1 (u), Xk > FX−1 (u)}
.
1−u
Lemma 1 gives the behavior of FX−1 (u) = q{(1 − u)−1 }, whilst the proof of Proposition 1
provides P(Xj > x, Xk > x) = E{min(Wj , Wk )(1−δ)/δ }x−1/δ − L(x)x−1/{ηW (1−δ)} , giving
P{Xj > FX−1 (u), Xk > FX−1 (u)}
F −1 (u)−1/δ
F −1 (u)−1/{ηW (1−δ)}
= E{min(Wj , Wk )(1−δ)/δ } X
− L{FX−1 (u)} X
1−u
1−u
1−u #
"
(1−2δ)/(1−δ)
1−δ
δ
=χ 1+
(1 − u)(2δ−1)/(1−δ) {1 + o(1)}
δ
2δ − 1
− L{(1 − u)−1 }(1 − u)δ/{ηW (1−δ)}−1 {1 + o(1)},
4
with constant terms absorbed in to L. Since (2δ − 1)/(1 − δ) < δ/{ηW (1 − δ)} − 1 for ηW < 1,
the result follows.
Supporting information for Section 3
^
Estimated parameter log(λ)
−4 −2
0
2
4
6
8
2
●
d=2
d=5
d=10
d=15
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
2.0
0.1
0.2
0.3
●
●
●
●
●
●
0.4
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
0.5
True parameter δ
0.6
0.7
0.8
●
d=2
d=5
d=10
d=15
●
●
●
●
●
●
●
●
●
●
●
0.9
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
0.0
Estimated parameter ν^
0.5
1.0
1.5
●
●
●
●
0.1
0.2
0.3
0.4
0.5
True parameter δ
0.6
0.7
0.8
0.9
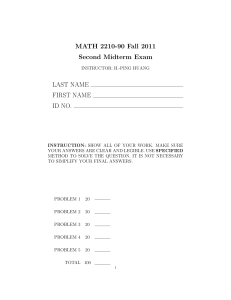
Figure 1: Boxplots for the MLEs log(λ̂) and ν̂, estimated concurrently with δ̂ as in Figure 3
of Section 3.2.
5
3
3.1
Supporting information for Section 4
Bootstrap procedure
To demonstrate that the stationary bootstrap procedure described in §4.1 adequately reproduces the temporal dependence in the extremes, we consider a spatial extension of the
extremal index for univariate time series. For a stationary time series {Xt }, the extremal
index, θ ∈ [0, 1], can be defined as
θ = lim P(X2 ≤ un , . . . , Xpn ≤ un |X1 > un ),
n→∞
10
0
5
Density
15
where pn = o(n) and un is a series such that n{1−F (un )} → τ ∈ (0, ∞). The extremal index
describes the degree of temporal clustering of extremes, with 1/θ the limiting mean cluster
size. A popular estimator for θ is the so-called Runs Estimator (Smith and Weissman, 1994).
The estimate is formed by taking the reciprocal of the mean cluster size, whereby threshold
exceedances are determined to be part of different clusters (the same cluster) if they are
separated by a run of at least m (fewer than m) consecutive non-exceedances.
In our application we have a time series of spatial processes {Xt (s)}, which, as we consider
winter months only, may reasonably be deemed stationary. In analogy to the univariate case,
we define clusters of spatial threshold exceedances as follows. A realization of the process
is deemed to be a “threshold exceedance” if the observation at any site exceeds a given
threshold. Clusters are then defined as sequences of threshold exceedances separated by
a run of at least m non-exceedances, and θ as the reciprocal mean cluster size. Figure 2
displays a histogram of estimated θs, using a value of m = 1, from 200 bootstrap samples,
along with that from the original dataset of 50 sites temporally thinned to one observation
per day. The threshold value used was the 95%-quantile, as in the model fit. The agreement
between the original and bootstrap samples indicates that the temporal structure of the
extremes is adequately reproduced.
0.68
0.70
0.72
0.74
0.76
0.78
0.80
0.82
θ
Figure 2: Estimates of the extremal index from the time series of spatial processes using
the stationary bootstrap sampling procedure described in §4.1. The vertical line is the value
from the original sample.
6
3.2
Additional model fit diagnostics
New model
Gaussian model
0.20
0.20
Empirical
Model
Empirical
Model
0.15
Density
Density
0.15
0.10
0.05
0.10
0.05
0.00
0.00
5
10
15
20
5
Number of exceedances
New model
15
20
Gaussian model
0.10
0.10
Empirical
Model
Empirical
Model
0.08
0.08
0.06
Density
Density
10
Number of exceedances
0.04
0.02
0.06
0.04
0.02
0.00
0.00
0
10
20
30
40
50
0
Number of exceedances
10
20
30
40
50
Number of exceedances
Figure 3: Distribution of the number of exceedances, given at least one exceedance of the
95%-quantile threshold. These histograms are based on the data at the 20 sites used for
fitting the model (top) or all 50 sites (bottom). Model-based quantities are calculated for
our new model (left) and the Gaussian model (right) by simulating 105 values from the fitted
dependence models.
References
Resnick, S. I. (2007).
Springer, New York.
Heavy Tail Phenomena: Probabilistic and Statistical Modeling.
Smith, R. L. and Weissman, I. (1994). Estimating the extremal index. J. Roy. Statist. Soc.
B, pages 515–528.
7