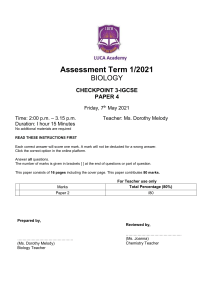
Family Name _____________________ First Name _____________________ Student Number |__|__|__|__|__|__|__|__| Venue ____________________ Seat Number ________ No electronic/communication devices are permitted. No exam materials may be removed from the exam room. Mechanical Engineering EXAMINATION For Examiner Use Only Question Mark Mid-year Examinations, 2021 ENME403-21S1 (C) Linear Systems Control and System Identification Examination Duration: 120 minutes Exam Conditions: Restricted Book exam: Approved materials only. Any scientific/graphics/basic calculator is permitted. Materials Permitted in the Exam Venue: Restricted Book exam materials. Students may bring into the exam: One page of A4 notes both sides OR Two pages A4 notes one side each – basically 2 A4 sides of notes, anything they want, handwritten, printed, etc. Pens, pencils and highlighters. Materials to be Supplied to Students: 1 x Write-on question paper/answer book Instructions to Students: Students may use pens, pencils and highlighters in their answer book as long as workings are shown and the answer is clear. There are four (4) questions in this exam. 75 marks total are available. Total ________ Mid-year Examinations, 2021 ENME403-21S1 (C) Page 2 of 13 Mid-year Examinations, 2021 ENME403-21S1 (C) Questions Start on Page 4 Page 3 of 13 TURN PAGE Mid-year Examinations, 2021 QUESTION ONE ENME403-21S1 (C) (20 marks) An active mass driver is a system designed to actively suppress the response of a building to earthquake excitations. The active mass is driven with a force u(t) to induce motion. Consider the undamped two-storey scale model building below and its equations of motion: u(t) m v̈ + (k + k )v − k v = u(t) m v̈ − k v + k v = u(t) 𝑣 𝑣 Where m = m = 5 kg, and k = k = 20 N/m. a) Show that the state-space equation of motion for the open-loop system is: 0 0 1 0 0 0 0 0 1 0 𝐱̇ = 𝐱+ u −8 4 0 0 0.2 4 −4 0 0 0.2 Page 4 of 13 [5 marks] Mid-year Examinations, 2021 ENME403-21S1 (C) Only one sensor is present, measuring the displacement of floor 1 (i.e. y = v ). To implement feedback control, an estimator-controller is implemented with gains K and K . b) To select an optimal set of controller gains, LQR is used. To reduce damage to [5 marks] the building, the displacement of the top floor (v ) should be minimised at any cost. Provide a reasonable choice of Q and R matrices for this system and control goals, and justify your choice. c) In terms of matrix symbols only (e.g. A, A , B, C, K, K ), derive the expression for [5 marks] the full estimator-controller system transfer matrix from the control input u to the estimated state vector 𝐱 (i.e. ( ) ) and state its dimensions. ( ) Page 5 of 13 TURN PAGE Mid-year Examinations, 2021 QUESTION TWO ENME403-21S1 (C) (20 marks) The state space equations for an open-loop continuous-time system are: 𝐱̇ = A𝐱 + Bu y = C𝐱 Consider a system with the following state-space matrices: A= 3 2 0 −2 B= 1 3 C = [1 2] a) A controller is designed for this system with gains of K = [4 2]. Find the closed-loop plant matrix. What are the closed loop eigenvalues? Is the closed-loop system stable? [5 marks] b) Use the Lyapunov method with Q = 12 ∗ I to confirm your answer to c). −2 0 (If you were not able to solve c), use A = .) −8 −4 [5 marks] Page 6 of 13 Mid-year Examinations, 2021 ENME403-21S1 (C) c) Using the state space equations, show that this system’s transfer function from input 𝑢 to output 𝑦 is: [5 marks] Y(s) 7s − 10 = U(s) s −s−6 d) Using ( ) , convert the system into Control Canonical Form (CCF). [5 marks] ( ) Page 7 of 13 TURN PAGE Mid-year Examinations, 2021 ENME403-21S1 (C) QUESTION THREE (20 marks) Given the following state space system: 𝐱̇ = 0 5 −2 0 𝐱+ u 2 1 y = [0 2]𝐱 with eigenvalues and eigenvectors: and λ =2 𝐯 = 1 1 λ = −3 𝐯 = −2 5 a) Find the state transition matrix, e . Then, find the response 𝐱(t) to a unit 1 impulse input u(t) = δ(t) under initial conditions 𝐱 𝟎 = . −1 [5 marks] b) If possible, find controller gains, K, to place closed loop poles at s = −2, −4. [5 marks] Page 8 of 13 Mid-year Examinations, 2021 ENME403-21S1 (C) c) If possible, find gains, K , to place estimator poles at s = −15 ± 15j. Are these poles suitable for convergence of estimator error to zero? Explain your answer. [5 marks] d) Sketch and clearly label the open-loop, closed-loop and combined estimator-controller response to a unit step input u(t) = 1.0 ∗ H(t). [5 marks] Page 9 of 13 TURN PAGE Mid-year Examinations, 2021 ENME403-21S1 (C) QUESTION FOUR (20 marks) Given the following continuous-time state space system: 0 1 𝐱̇ = 0 0 8 10 0 0 1 𝐱+ 0 u 1 1 y = [1 1 0]𝐱 with (approximate) eigenvalues λ = +4, −1, −2 and eigenvectors −1 V = −4 −16 −1 1 1 −2 −1 4 V = −0.0667 −0.1 −0.033 −1.6 −0.4 0.2 −0.667 −0.5 0.1667 a) Convert the continuous-time system to modal form. [5 marks] b) This CTS is unstable. Without further calculations: Could you design a controller, K, to place closed loop poles? Could you design an estimator, Ke, to place estimator poles? And is the system stabilizable? Explain your answers. [5 marks] Page 10 of 13 Mid-year Examinations, 2021 ENME403-21S1 (C) c) Convert the CTS to a discrete-time system with ∆t = 0.1 s. Is this DTS stable? State why / why not. [5 marks] 1 d) For a unit step input (u = 1.0) and initial conditions 𝐱 𝟎 = 0 , determine 0 the values of the states after two timesteps (𝐱 𝟐 ). [5 marks] End of Examination Page 11 of 13 TURN PAGE Mid-year Examinations, 2021 ENME403-21S1 (C) Space for Extra Working – Please Clearly Label Question Numbers Page 12 of 13 Mid-year Examinations, 2021 ENME403-21S1 (C) Page 13 of 13 TURN PAGE