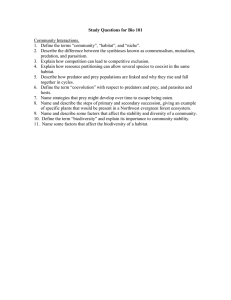
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/23304213 Fine-scale habitat modeling of a top marine predator: Do prey data improve predictive capacity? Article in Ecological Applications · November 2008 DOI: 10.1890/07-1455.1 · Source: PubMed CITATIONS READS 185 1,097 3 authors: Leigh G. Torres Andrew Read Oregon State University Duke University 114 PUBLICATIONS 3,444 CITATIONS 251 PUBLICATIONS 15,429 CITATIONS SEE PROFILE Patrick Neal Halpin Duke University 178 PUBLICATIONS 11,305 CITATIONS SEE PROFILE Some of the authors of this publication are also working on these related projects: Whale baleen View project OPAL: Overlap Predictions About Large whales View project All content following this page was uploaded by Leigh G. Torres on 26 March 2019. The user has requested enhancement of the downloaded file. SEE PROFILE Ecological Applications, 18(7), 2008, pp. 1702–1717 Ó 2008 by the Ecological Society of America FINE-SCALE HABITAT MODELING OF A TOP MARINE PREDATOR: DO PREY DATA IMPROVE PREDICTIVE CAPACITY? LEIGH G. TORRES,1,3 ANDREW J. READ,1 1 AND PATRICK HALPIN2 Duke University Marine Laboratory, Nicholas School of the Environment and Earth Sciences, 135 Duke Marine Lab Road, Beaufort, North Carolina 28516 USA 2 Duke University Marine Geospatial Ecology Laboratory, Nicholas School of the Environment and Earth Sciences, Box 90328, Durham, North Carolina 27708 USA Abstract. Predators and prey assort themselves relative to each other, the availability of resources and refuges, and the temporal and spatial scale of their interaction. Predictive models of predator distributions often rely on these relationships by incorporating data on environmental variability and prey availability to determine predator habitat selection patterns. This approach to predictive modeling holds true in marine systems where observations of predators are logistically difficult, emphasizing the need for accurate models. In this paper, we ask whether including prey distribution data in fine-scale predictive models of bottlenose dolphin (Tursiops truncatus) habitat selection in Florida Bay, Florida, USA, improves predictive capacity. Environmental characteristics are often used as predictor variables in habitat models of top marine predators with the assumption that they act as proxies of prey distribution. We examine the validity of this assumption by comparing the response of dolphin distribution and fish catch rates to the same environmental variables. Next, the predictive capacities of four models, with and without prey distribution data, are tested to determine whether dolphin habitat selection can be predicted without recourse to describing the distribution of their prey. The final analysis determines the accuracy of predictive maps of dolphin distribution produced by modeling areas of high fish catch based on significant environmental characteristics. We use spatial analysis and independent data sets to train and test the models. Our results indicate that, due to high habitat heterogeneity and the spatial variability of prey patches, fine-scale models of dolphin habitat selection in coastal habitats will be more successful if environmental variables are used as predictor variables of predator distributions rather than relying on prey data as explanatory variables. However, predictive modeling of prey distribution as the response variable based on environmental variability did produce high predictive performance of dolphin habitat selection, particularly foraging habitat. Key words: bottlenose dolphin; environmental variability; Florida Bay, Florida, USA; generalized additive models; habitat selection; Mantel’s tests; predator–prey dynamics; predictive distribution models; spatial scale; Tursiops truncatus. INTRODUCTION Modeling species distribution is a valuable tool of biological conservation efforts, especially predictive models of marine predators due to the logistical difficulties of monitoring their distributions at sea. For instance, managers of whale and dolphin populations can benefit from accurate model-derived predictions of cetacean habitat to mitigate anthropogenic effects, such as fisheries by-catch (Torres et al. 2003), sonar (Cox et al. 2006), and the impacts of habitat alterations on ecosystem function (Baumgartner et al. 2000, D’Amico et al. 2003), in order to protect critical habitat (Hooker Manuscript received 5 September 2007; revised 23 January 2008; accepted 14 February 2008. Corresponding Editor: K. Stokesbury. 3 Present address: National Institute of Water and Atmospheric Research (NIWA), 301 Evans Bay Parade, Greta Point, Private Bag 14-901, Kilbirnie, Wellington, New Zealand. E-mail: l.torres@niwa.co.nz et al. 1999, Gregr and Trites 2001) and understand the ecology of these animals (Hamazaki 2002). By assuming that the distribution of cetaceans is nonrandom relative to environmental variability, predictive models of cetacean distribution typically identify the ecological relationships between the environment and species habitat selection. With the goal of improving conservation applications of modeling efforts, our study examines the potential for increased predictive capacity by models of dolphin distribution that include direct prey data as an explanatory variable. Abiotic variables may be correlated with the distribution of dolphins (i.e., temperature, salinity, depth, dissolved oxygen, distance from shore). However, these metrics often have little direct influence on the actual selection of habitats by dolphins. In reality, these abiotic variables are frequently used as proxies for prey distribution. Predictive models of dolphin distribution rarely include direct data on prey distribution because prey sampling is more difficult than sampling of abiotic 1702 October 2008 MODELING MARINE PREDATOR HABITAT variables. Therefore, as top marine predators, dolphins are removed from the direct influence of the environmental variability that is commonly used to characterize their habitat. The ability to predict dolphin distribution requires an understanding of the ecological factors relevant to dolphin habitat selection. Environmental characteristics influence fish distribution by spatial structuring of phytoplankton and zooplankton populations and the physiological limits of fish. The distribution of dolphin predators is contingent upon this spatial structuring of their prey. Therefore, if dolphins track their prey, dolphin habitat selection should mimic the environmental variability that structures fish distribution. The relationships between environment and prey and between prey and predators are well understood (Hugie and Dill 1994, Sih 1998). However, despite established predator–prey theory on the response of predators to their environment (see Lima 2002), the extent to which the environment can be used to predict predator distribution without any information on the intermediary step (prey) remains unevaluated. In a recent paper reviewing the techniques for cetacean habitat modeling (Redfern et al. 2006), the authors note that (1) environmental variables are used as proxies of prey distribution and (2) cetacean habitat models should ideally incorporate data on prey populations and understand the ecological relationships between predators, prey, and their environment. It is generally believed that predictive models of cetacean distribution would improve with the inclusion of direct data on prey distribution and densities (Davis et al. 1998, Ferguson et al. 2006a, Redfern et al. 2006), but this assertion has never been tested. Few studies have actually sampled prey and monitored dolphin distributions synoptically to describe correlations with dolphin habitat use (Allen et al. 2001, Heithaus and Dill 2002, Benoit-Bird and Au 2003). In this paper, we ask whether including prey distribution data in fine-scale predictive models of bottlenose dolphin (Tursiops truncatus) habitat selection in Florida Bay, Florida, USA, improves predictive capacity. We begin with an exploratory exercise to compare the response of dolphin distribution and fish catch to a suite of environmental variables. We assess the pragmatism of predictive models’ reliance on proxy relationships between environment and dolphin distribution under the assumption that dolphin predators mimic the spatial distribution of their prey. If this assumption is true, dolphins and fish should display similar responses to the same environmental variables. This phase of analysis also evaluates the optimal descriptive metric of fish sampling data (i.e., catch per unit effort, diversity, richness) for use in models of dolphin habitat selection. Next, in hypothesis 1 (H0 1), we assert that dolphin habitat selection can be predicted without recourse to describing the distribution of their prey. We assess four types of models, with and without fish sampling data as 1703 explanatory variables, according to their capacity to predict dolphin habitat selection. Hypothesis 2 (H0 2) builds on the results of H0 1 to determine whether accurate predictive maps of dolphin distribution can be produced by modeling areas of high fish catch based on significant environmental characteristics. The model tested in H0 2 predicts habitat with high prey abundance and assumes that dolphins will distribute themselves accordingly. We collected data in Florida Bay during four summer field seasons (2002–2005) to test these hypotheses. These data include standardize dolphin surveys and prey sampling by bottom trawls, both with associated habitat quality measurements. Florida Bay is a remarkably heterogeneous ecosystem (Sogard et al. 1989, Zieman et al. 1989, Fourqurean and Robblee 1999, Durako et al. 2002) that lends itself to a fine-scale study of dolphin habitat selection due to large habitat variation over small spatial distances. Ample data are available from these four years of fieldwork to use independent data sets to train and test models. Shark sampling conducted in Florida Bay found few sharks of the species and sizes that would pose a threat to dolphins or cause behavior modifications (Heithaus 2001, Torres et al. 2006, Wiley and Simpfendorfer 2007). Thus, we assume a minimal predation effect on dolphin habitat selection in Florida Bay. Commercial fishing is prohibited and recreational boating is minimal in Florida Bay, so we also assume that fine-scale dolphin distribution is not heavily influenced by boat traffic, fishing activities, or other proximate anthropogenic activities. We use generalized additive models (GAMs) to model dolphin and fish catch distribution because they are nonparametric and describe nonlinear relationships. GAMs have been used in previous work to detect significant nonlinear relationships between cetacean distribution and environmental variables (Forney 1999, 2000, Hedley et al. 1999, Ferguson et al. 2006b). Moreover, Segurado and Araujo (2004) found that GAMs are an appropriate technique to model species with complex distribution and behavior patterns relative to environmental variables. Our spatial analysis is performed on presence/absence data, incorporating each sighting equally regardless of group size to minimize the effect of population density on habitat selection patterns. A fine-grain resolution of 50 m is applied to all analyses because of the extreme habitat heterogeneity in Florida Bay. The scale of study is an important and, often confounding, variable related to distribution matching between predator and prey in marine environments (Schneider and Piatt 1986, Logwerwell and Hargreaves 1996, Heithaus and Dill 2006). Working at a small scale fosters the incorporation of small, yet important, refuges for prey and the ability of predators to use patchy habitats with high prey abundance. Moreover, fine-scale studies of species biogeography coupled with behavioral data can reveal considerable insight about the biological mechanisms 1704 Ecological Applications Vol. 18, No. 7 LEIGH G. TORRES ET AL. FIG. 1. Bottom types and zones of Florida Bay, USA. Inset: Florida Bay lies at the southern end of the Florida peninsula (area in box enlarged). Black lines designate boundaries between the six environmentally homogeneous zones. The bottom types map is based on USGS map OFR 97-526. underlying associations between distribution, environment, and space. Therefore, we recorded the behavior state of observed dolphins at each sighting to denote information on the functional mechanisms of habitat selection (Heithaus and Dill 2002, Hastie et al. 2004). Dolphins may socialize or travel through marginal habitat, but forage in areas where critical resources exist; such areas may deserve increased management attention and protection. Therefore, due to the importance of identifying feeding areas in conservation modeling applications, we assess each model’s ability to predict dolphin foraging habitat, as well as the model’s overall predictive capacity. METHODS Study area Florida Bay lies at the southern tip of the Florida Peninsula and is ;1800 km2. Florida Bay is composed of a heterogeneous mosaic of benthic habitat types including seagrass, mud, sand, and hard-bottom areas composed of sponge and coral structures (Fig. 1). Previous research in Florida Bay subdivided the bay into environmentally distinct zones based on fish composition (Sogard et al. 1989, Thayer and Chester 1989, Thayer et al. 1999), water quality (McIvor et al. 1994, Boyer et al. 1999), and seagrass distribution (Zieman et al. 1989, Hall et al. 1999). We used these definitions in our study to divide the bay into six relatively homogeneous zones: Atlantic, Central, Eastern, Gulf, Flamingo, and Western (see Plate 1). Field methods We conducted a fine-scale study of dolphin habitat selection in Florida Bay during the summers of 2002 through 2005. This fieldwork consisted of track line surveys for dolphin presence and absence. We drove a 5.5-m fiberglass skiff at ;30 km/h with three trained observers searching for dolphins. When a dolphin sighting occurred, we stopped the research vessel so that the radial distance to the sighting and angle from the track line could be estimated. We used these data to determine the perpendicular distance from the track line (Buckland et al. 2001) and to generate pseudo-absences (see Pseudo-absence generation below). The field crew then slowly approached the dolphin(s) to record data including GPS location, depth, benthic habitat type, water quality metrics (see Benthic habitat and water October 2008 MODELING MARINE PREDATOR HABITAT quality sampling below), group size, and behavior state (forage, travel, socialize, rest, or unknown). For these analyses, we classified dolphin behavior at each sighting as foraging or non-foraging. We determined foraging behavior if dolphins were observed catching fish, chasing fish, or surfacing erratically and quickly within one area using fluke-out dives to promote deep diving profiles. Additionally, we recorded water quality and bottom type at the start and end of each survey, as well as every 30 min if no dolphins were sighted. These methods allowed us to assess environmental conditions at locations of both dolphin presence (sightings) and absence. Due to limited knowledge on dolphin habitat use in Florida Bay prior to fieldwork in 2002, we used a random approach to dolphin surveys during the 2002 and 2003 field seasons. During each of these field seasons we surveyed the entirety of Florida Bay twice. This allowed us to identify areas of high use by dolphins. From these surveys in 2002 and 2003, we established track lines in areas of high dolphin use within three of the environmentally distinct zones: Atlantic, Central, and Gulf (Fig. 2). We completed replicate surveys along each track line four times in 2004 and twice in 2005. Benthic habitat and water quality sampling The USGS produced a bottom types map of Florida Bay in 1997 (USGS, OFR 97-526). We used this map as the foundation for benthic habitat classification throughout Florida Bay. To refine this map, we assessed and recorded benthic habitat type at all water and habitat quality sampling locations. These 1092 sampling locations were used to update and improve the resolution of the original USGS map (see Fig. 1). We classified habitat types by visual inspection (through the water column) or, when turbidity did not allow the former, a small bottom grab sampler (;5 cm diameter, ;7.7 cm deep) was used. We categorized bottom types with the same classification system used by the USGS map with the addition of two classes: (1) patchy seagrass, i.e., areas composed of dense patches of seagrass interspersed in barren landscapes and, (2) hard bottom with seagrass, i.e., areas composed on equal amounts of sponge and coral habitat as seagrass habitat. Thus, we used nine bottom type classifications in this study: sparse seagrass, intermediate seagrass, dense seagrass, patchy seagrass, hard bottom, hard bottom with seagrass, mud, sand, and mud bank. In 2002 and 2003, a YSI 30 conductivity instrument (Yellow Springs Instruments, Yellow Springs, Ohio, USA) measured salinity and temperature at the midpoint of the water column. To estimate turbidity, percentage of dissolved oxygen, and chlorophyll a values during these years, we acquired data through the Southeast Environmental Research Center’s Water Quality Monitoring Network at Florida International University, Miami, Florida, USA. This program has 24 water quality stations with monthly sampling periods 1705 FIG. 2. Survey areas and track lines during 2004 and 2005 field seasons. Gray areas represent surveyed regions within larger zones. Black lines designate the track line followed within each zone for replicate surveys. placed throughout Florida Bay. Using ArcGIS (version 9.1; Environmental Systems Research Institute, Redlands, California, USA), we interpolated these data points with an inverse distance weighting (IDW) technique that preserves local variation between sample points. We chose an IDW interpolation technique as the most appropriate method to create raster grids for preservation of the water quality variation that exist in Florida Bay across spatial scales less than or equal to the distances between the 24 water quality stations. In total, we created 18 separate rasters: one grid for each variable (turbidity, percentage of dissolved oxygen, chlorophyll a) for each month of the study period (June, July, August of 2002 and of 2003). Finally, we used each location (sightings, absences, trawls, and 30-min survey interval water quality sites) to sample the appropriate temporal set of three grids. We used these values of turbidity, percentage of dissolved oxygen, and chlorophyll a in all further analyses regarding 2002 and 2003 data points. During the 2004 and 2005 field seasons, we used a YSI 6600 Sonde monitor (Yellow Springs Instruments) to sample the following water quality data in the upper and lower portions of the water column: temperature (in degrees Celsius), salinity (ppt), turbidity (nephelometric turbidity units [NTU]), percentage of dissolved oxygen, and chlorophyll a. We applied the average value of the upper and lower water column measurements for each location in all analyses because no discernable difference was detected between water samples from the wellmixed, shallow waters of Florida Bay. (Methods on the calibration of YSI-based chlorophyll a readings can be found in Appendix A.) Fish sampling We sampled the fish community throughout Florida Bay using a 3-m demersal research otter trawl towed at 1706 Ecological Applications Vol. 18, No. 7 LEIGH G. TORRES ET AL. ;4 km/h for 3 min. We randomly generated the locations of trawl sampling sites and stratified them by benthic habitat type to sample the different bottom types within each zone. We conducted a minimum of three trawls on each survey day. All captured fish were identified, measured, and then released alive. We recorded all water and habitat quality metrics prior to each trawl and the GPS positions at the start and end of each trawl to calculate the exact distance trawled. We converted the catch from each trawl into four descriptive metrics: catch per unit effort (CPUE), dolphin prey per unit effort (DPPUE), Simpson’s diversity index per unit effort (SPUE), and Margalef’s species richness index per unit effort (MPUE). Catch per unit effort is the total number of fish captured per meter of trawling. Dolphin prey per unit effort is a subset of CPUE consisting of catch that may be potential dolphin prey items. We determined this subset by fish species and size. Due to the expansive, uninhabited nature of Florida Bay, stranded dolphins are rarely recovered, and to date no data exist from stomach contents in this region. Therefore, we assumed the diet of dolphins in Florida Bay to be similar to the diets of bottlenose dolphins documented in adjacent areas (Barros 1987, 1993, Barros and Odell 1990, Barros and Wells 1998). The SPUE is Simpson’s diversity index ðRp2i Þ for each trawl divided by the length of the trawl in meters. We calculated Margalef’s richness index ((S 1)/log(N)) for each trawl and converted it into the per meter of trawling metric MPUE. We implemented these four metrics in the exploratory exercise to determine the fish catch metric most correlated with dolphin habitat selection. Unfortunately, we were unable to include a metric of fish biomass captured by each trawl in the analysis due to a lack of length–mass parameters for a number of frequently caught fish. Pseudo-absence generation While surveying for dolphins, we constantly collected absence data. However, these data are in the form of strip transect areas, as opposed to dolphin sightings, which are point locations. Therefore, to test for dolphin habitat selection with binomial presence/absence data, we generated pseudo-absence points in the areas of absence by accounting for detection probabilities (MacKenzie et al. 2002, Brotons et al. 2004). The quality of a model can be significantly influenced by the location of absence points (Engler et al. 2004). Therefore, we proportionally distributed pseudo-absence locations while accounting for survey effort and conditions to avoid labeling areas of missed sightings as absence locations. We generated 10 times the number of sightings as pseudo-absences and randomly distributed these pseudo-absence points in proportion to survey effort, distance from track line, and sighting conditions. (See Appendix B for more details on pseudo-absence generation.) Grid sampling We created interpolated raster grids, with 50-m grid cell size, to obtain water quality values for all absence points. We recorded water quality and habitat metrics at all dolphin sightings so it was unnecessary to sample presence locations (except to acquire turbidity, percentage of dissolved oxygen, and chlorophyll a values for 2002 and 2003 sightings). We created daily water quality grids for each survey day through interpolations of all water quality sampling locations on each survey day (sightings, trawls, 30-min survey intervals, and start and end of surveys samples). We employed a kriging interpolation method to generate daily water quality grids because numerous data points occupied relatively small spatial extents, allowing the kriging method to accurately interpolate spatial trends between data points. In contrast to water quality, we created seasonal interpolated surfaces of trawl data of the four fish metrics. With only three trawls conducted on each survey day we did not have enough spatial coverage to adequately describe the daily spatial variability of fish distribution. Therefore, we utilized all sampling locations conducted in each zone and summer field season to interpolate fish grids. With this method we make the assumption that the fish community structure within each zone of Florida Bay does not change throughout a summer (Matheson et al. 1999, Thayer et al. 1999, Gaertner 2000). We created CPUE, DPPUE, SPUE, and MPUE grids for each zone during each summer between 2002 and 2005. We interpolated these grids from trawl data points using either a spline or kriging method, determined by the accuracy of real data point representation. Analysis Generalized additive models.—Using S-plus 7.0 (Insightful Corporation, Seattle, Washington, USA), we created models of dolphin habitat selection using generalized additive models (Hastie and Tibshirani 1990) with a smoothing function and backwards variable selection. We chose the optimal model, composed of the combination of variables that best fit the observed data, based on the lowest Akaike Information Criterion (AIC; Burnham and Anderson 1998). The GAMs generate smoothed curves representing the relationship between the response and each predictor variable in the model. The GAMs are particularly good at identifying and describing nonlinear relationships that are more typical than linear relationships in ecology (Oksanen and Minchin 2002). We conducted GAMs with two types of data: (1) binomial dolphin presence/absences data with a logit link function and (2) continuous fish catch data using a Gaussian family model with an identity link function. Mantel’s tests.—Mantel’s tests (Mantel 1967) are able to overcome many problems associated with examining species–environment relationships. They are multivari- October 2008 MODELING MARINE PREDATOR HABITAT ate, explicitly test for the effect of space on the response variable, account for multicolinearity between predictor variables, and identify and account for spatial autocorrelation of explanatory variables (Schick and Urban 2000). Mantel’s tests are a more robust analysis than GAMs, which have been criticized for their tendency to overfit data and give artificially high P values (Guisan and Zimmermann 2000, Guisan et al. 2002, Vaughan and Ormerod 2005). Unlike GAMs, greater correlation between predictor and response variables is required to obtain a significant P value from a Mantel’s test. Therefore, for the exploratory exercise, we used Mantel’s tests (run in S-Plus 7.0) to determine significant predictor variables correlated with dolphin presence/absence in order to limit the number of variables included in the GAMs. (See Appendix C for details on Mantel’s tests.) Predictive maps.—We used the zero line on each GAM plot to divide the range of the explanatory variable that had a positive effect from the range that had a negative effect on the response variable. We applied simple threshold cutoffs from these GAM plots in a geographic information system (GIS) framework to define dolphin habitat. Where the response curve was above the zero line, the explanatory variable was used to select habitat. This threshold approach is an extension of envelope models that generate reproducible results based on minimum and maximum values of explanatory variables (Redfern et al. 2006). Using GIS, we selected grid cells from interpolated surfaces representing various variables (i.e., salinity, bottom type) based on the thresholds determined by the GAM models. We refer to this technique as ‘‘GAMvelopes.’’ Model evaluation.—Model evaluation is a critical step in producing predictive species distribution models (Rushton et al. 2004, Vaughan and Ormerod 2005). Although evaluation standards can vary depending on the goal of the model, most evaluation techniques must reflect the model’s ability to correctly select habitat, as well as exclude non-habitat. We assessed the predictive capacity of each GAM model used to map dolphin habitat using the true skill statistic (TSS; Allouche et al. 2006) calculated from traditional model accuracy measures of sensitivity and specificity. The TSS is defined as TSS ¼ sensitivity þ specificity 1: The TSS is insensitive to both prevalence and the size of the validation set, combines both errors of commission (sensitivity) and omission (specificity), and is simple to calculate and interpret. The TSS ranges from 1 to þ1, where þ1 indicates perfect model performance. A zero value means the model performed no better than random, and a negative value indicates that the model performed worse than random guessing would have predicted. The TSS assigns equal weight to sensitivity and specificity, which makes false positive as unwanted 1707 as false negatives. (See Appendix D for details on model evaluation.) Hypothesis testing We performed the following analyses by creating dolphin habitat selection models with training data sets and evaluating each models’ predictive capacity with independent testing data sets. As explained above, two different survey methods were employed in our fieldwork. Thus, we matched testing and training data sets based on consistent field methods: we used data collected from the Atlantic, Central, and Gulf zones in 2004 and 2005 in our exploratory exercise; for H0 1, we used 2004 data to train models and 2005 data to test each model; we explored H0 2 with models trained based on 2002 data and tested by predicting data collected in 2003. Exploratory exercise.—To examine the effect of the same environmental variables on predator and prey, we first determined the significant predictors of dolphin presence/absence with binomial Mantel’s tests using the following explanatory variables: temperature, salinity, turbidity, chlorophyll a, percentage of dissolved oxygen, distance from mud banks, CPUE, DPPUE, MPUE, and SPUE. We transformed the last five variables to a log þ 1 scale. (Detail on the use of Mantel’s tests in the exploratory exercise can be found in Appendix E.) The next step of our exploratory exercise modeled fish catch relative to environmental variability. We used the fish metric identified as most correlated with dolphin presence/absence by the Mantel’s tests (CPUE). Those explanatory variables found to be correlated with CPUE were then tested in a binomial GAM of dolphin presence/absence for that same zone. To conclude this exploratory exercise, we created and compared GAM plots of CPUE and binomial dolphin presence/absence to the same explanatory variables. H0 1.—To evaluate the utility of fish distribution data in predictive models of dolphin habitat selection we created four types of models that used different sets of explanatory variables. The first model predicted dolphin presence/absence based on environmental factors (notation: DOLPHIN ; ENV). The next model predicted dolphin distribution based only on fish catch data (notation: DOLPHIN ; FISH). The third model predicted dolphin habitat by modeling both environmental factors and fish catch data (notation: DOLPHIN ; ENV þ FISH). The final model predicted areas of high fish catch (CPUE) based on environmental factors (notation: FISH ; ENV). This model essentially predicted habitat with high prey abundance and assumed that hungry dolphins would distribute themselves appropriately. We created the first three types of models using presence and absence points from four surveys conducted in each zone (Atlantic, Central, and Gulf) in 2004. We developed models of the fourth type based on fish catch data from all trawls conducted in each of the three zones during the 2004 summer. 1708 LEIGH G. TORRES ET AL. Ecological Applications Vol. 18, No. 7 FIG. 3. Example ‘‘GAMvelope’’ predictive map for the Atlantic region on 23 July 2005. Habitats selected by thresholds generated from generalized additive model (GAM) plots are shown modeling 2004 dolphin presence/absence based on environmental variables (DOLPHIN ; ENV). The dashed horizontal black lines represent the zero line in each plot. The vertical dotted lines delineate the range of the explanatory variable above the zero line used as thresholds. The dotted lines bracketing the response curves are twice the standard error and function as confidence limits of the model. Thresholds from GAM plots applied in GIS to select habitats are: bottom type (hard bottom with seagrass, intermediate seagrass, or sparse seagrass); salinity (,38.3 or .41.5; P ¼ 0.01); and turbidity (,2.2 or .2.5 and ,2.9; P ¼ 0.02). Each tick mark on the x-axis represents one sample at that value; i.e., sampling intensity. Note the different scales on the y-axis between plots. The habitat of six out of six sightings (open squares) was selected including three out of three foraging sightings (demarcated with an F). The locations of 45 of 61 absences (open circles) were not selected as habitat. This predictive map yielded a sensitivity of 1, a specificity of 0.7377, and a true skill statistic (TSS) of 0.7377. Abbreviations are: D, dense seagrass; HS, hard bottom with seagrass; H, hard bottom; I, intermediate seagrass; MB, mud bank; SP, sparse seagrass. NTU is nephelometric turbidity units. For each model we applied the ‘‘GAMvelope’’ technique to any explanatory variable with a significant parameter estimate (P , 0.05). We tested the predictive capacity of each 2004 model with presence and absence points from two independent surveys conducted in 2005 in each zone. The GAMvelope thresholds were applied to daily water quality grids for each 2005 survey day, seasonal CPUE grids for each zone in 2005, and a static bottom type grid of each zone. We subsequently calculated the sensitivity, specificity, and TSS for each 2005 predictive map. Additionally, we tallied the ratio of foraging sighting locations predicted to foraging sightings observed. Using six 2005 surveys as test data sets, we compared the TSS and percentage of foraging sightings correctly predicted between the four model types. Fig. 3 depicts an example GAMvelope predictive map based the DOLPHIN ; ENV model from the Atlantic zone in 2004 and tested by a dolphin survey in the Atlantic zone on 23 July 2005. The GAMs and threshold ranges applied to create the predictive maps of dolphin distribution for each model type tested in H0 1 are described in Table 1. H0 2.—This hypothesis explicitly tests the predictive capacity of dolphin distribution by the FISH ; ENV model type using large training (2002) and testing (2003) data sets. We created one GAM of CPUE for each zone based on trawls conducted in 2002 in each zone: Atlantic, Central, Gulf, Eastern, and the combined region of the Flamingo and Western zones. The Flamingo and Western zones are geographically adjacent and have similar environments, which allowed us to combine the zones to increase the sample size of trawls used to create the 2002 fish catch GAM. The predictor variables tested for a significant relationship with CPUE were bottom type, salinity, temperature, chlorophyll a, turbidity, percentage of dissolved oxygen, and distance October 2008 MODELING MARINE PREDATOR HABITAT 1709 TABLE 1. Description of the four types of generalized additive models (GAMs) created for each zone and tested in hypothesis 1 (H0 1; see Methods: Hypothesis testing: H0 1): DOLPHIN ; ENV þ FISH, DOLPHIN ; ENV, DOLPHIN ; FISH, and FISH ; ENV. Models based on data from zone/year Model type GAM model R2 Atlantic 2004 (9 presences, 137 absences) DOLPHIN ; ENV þ FISH Dolphins ; Bottom þ s(DPPUE) þ s(TEMP) þ s(MPUE) Dolphins ; Bottom þ s(SALINITY) þ s(Dist.MB) þ s(TURB) 0.9762 DOLPHIN ; ENV DOLPHIN ; FISH Dolphins ; s(SPUE) þ s(DPPUE) CPUE ; Bottom 0.7188 0.3761 Bottom ¼ HBSG, INT, Sparse; DPPUE , 0.005 or .0.022 (0.05) Bottom ¼ HBSG, INT, Sparse; SALINITY , 38.4 (0.01); TURB , 2.2 or .2.5 and ,3.0 (0.02) SPUE . 0.0185 and ,0.0225 (0.05) Bottom ¼ INT 12 trawls FISH ; ENV Central 2004 (21 presences, 206 absences) DOLPHIN ; ENV þ FISH P.A ; Bottom þ s(DPPUE) þ s(SALINITY) þ s(TEMP) þ s(CHLA) þ s(Dist.MB) þ s(TURB) 0.7846 DOLPHIN ; ENV P.A ; Bottom þ s(TEMP) þ s(CHLA) þ s(Dist.MB) þ s(TURB) 0.6676 DOLPHIN ; FISH P.A ; s(CPUE) þ s(DPPUE) CPUE ; Bottom þ s(SALINITY) 0.2274 Bottom ¼ Dense, Mud Bank; SALINITY , 42 or .50 (0.002); DPPUE . 0.011 and ,0.0225 (0.004); TEMP , 28.7 or .31.3 (0.015); TURB , 4.1 (0.016) Bottom ¼ Dense, Mud Bank; TEMP , 28.5 or .31 (0.0009); TURB , 4.5 (0.002) CPUE . 0.05 (,0.0001) 0.9807 Bottom ¼ Mud Bank P.A ; Bottom þ s(CPUE) þ s(TEMP) þ s(CHLA) þ s(TURB) þ s(DO) P.A ; Bottom þ s(Dist.MB) þ s(SALINITY) þ s(TEMP) þ s(CHLA) þ s(TURB) þ s(DO) P.A ; s(SPUE) þ s(CPUE) 0.5827 Bottom ¼ INT, MUD, SAND; DO . 102 (0.001); TURB , 9 (0.04) Bottom ¼ INT, MUD, SAND; Dist.MB , 4.1 or .7.2 (0.004); SALINITY , 34.7 or .38.1 (0.008) CPUE ; Bottom þ s(TEMP) 0.9234 13 trawls FISH ; ENV Gulf 2004 (21 presences, 145 absences) DOLPHIN ; ENV þ FISH DOLPHIN ; ENV DOLPHIN ; FISH 12 trawls FISH ; ENV 0.3610 ‘‘GAMvelope’’ thresholds applied in GIS 0.5134 0.1750 SPUE . 0.013 and ,0.0275 (0.003); CPUE , 0.08 or .0.42 (0.005) Bottom ¼ INT, MUD BANK Notes: Column 1 describes the number of presence and absence locations used to fit the first three types of GAMs for each zone. The number of trawls used to fit the last GAM (FISH ; ENV) is described in the bottom row for each zone. The selected model, based on the minimum Akaike Information Criterion (AIC) produced by the backward selection process, is described under ‘‘GAM model’’ with the corresponding R2 value. Thresholds to be applied in GIS to produce predictive maps were only generated for those explanatory variables that were significant at the 0.05 level. Values in parentheses are P values from GAM. Abbreviations: DOLPHIN, dolphin presence or absence; Bottom, bottom type; TEMP, temperature; CHLA, chlorophyll a; TURB, turbidity; DO, percentage of dissolved oxygen; CPUE, catch per unit effort; DPPUE, dolphin prey per unit effort; MPUE, Margalef’s richness index per unit effort; SPUE, Simpson’s diversity index per unit effort; Dist.MB, distance from mud banks (log þ 1); Dense, dense seagrass; INT, intermediate seagrass; Sparse, sparse seagrass; HBSG, hard bottom with seagrass. from mud banks (log þ 1). To select habitat in GIS we applied derived GAMvelope thresholds of significant explanatory variables to daily grids of the 2003 water quality metrics and a static bottom type grid for each zone (see Table 2 for model specifications). We used these habitat maps of fish abundance to predict dolphin sightings and pseudo-absence points from each 2003 survey in each zone. We then assessed sensitivity, specificity, the TSS, and the percentage of foraging sightings correctly predicted for each predictive map. In total, we created five zonal models from 99 trawls conducted in 2002. We validated these CPUE ; ENV models with 36 independent dolphin surveys from 2003. RESULTS Exploratory exercise The global Mantel’s tests for each zone found significant correlation between the explanatory variables and dolphin presence/absence, even when the effect of space was accounted for (Table 3). Many of the explanatory variables had significant spatial autocorrelation but the pure partial Mantel’s tests were able to compensate for these spatial trends to identify those explanatory variables with direct correlation to dolphin distribution. In the Atlantic zone during 2004 and 2005, CPUE and DPPUE were the only variables significantly 1710 Ecological Applications Vol. 18, No. 7 LEIGH G. TORRES ET AL. TABLE 2. Generalized additive models (GAMs) specifications of models used to test hypothesis 2 (H0 2): catch per unit effort as a function of environmental characteristics (CPUE ; ENV) from trawls conducted in each zone in 2002. Model R2 No. trawls used to create GAM Atlantic 2002 Central 2002 CPUE ; Bottom CPUE ; Bottom þ s(CHLA) þ s(Dist.MB) 0.4805 0.9662 22 23 Eastern 2002 Gulf 2002 Western and Flamingo 2002 CPUE ; Bottom CPUE ; s(Dist.MB) CPUE ; Bottom 0.2073 0.5827 0.4483 27 14 13 CPUE ; ENV GAM based on data from zone/year ‘‘GAMvelope’’ thresholds applied in GIS Bottom ¼ Dense, INT Bottom ¼ Dense, INT, Mud Bank; Dist.MB ¼ 0 or . 5.6 (0.002) Bottom ¼ Dense, INT, Mud Dist.MB . 5.75 and , 7.7 (0.04) Bottom ¼ Dense, Mud Bank Notes: Values in parentheses are P values from GAM. Key to abbreviations: Bottom, bottom type; CHLA, chlorophyll a; Dist.MB, distance from mud banks (log þ 1); Dense, dense seagrass; INT, intermediate seagrass. related to dolphin presence/absence once the effect of spatial location was removed. Salinity, chlorophyll a, percentage of dissolved oxygen, and CPUE were significantly correlated with dolphin distribution in the Central zone. The predictor variables correlated to dolphin presence/absence in the Gulf zone in 2004 and 2005 were salinity, chlorophyll a, and CPUE. With the effects of autocorrelation and multicollinearity removed in the pure partial Mantel’s tests, CPUE was identified as the fish metric most correlated with dolphin presence/absence in all three zones. No other fish metric was found significant, with the exception of DPPUE in the Atlantic zone. Based on this result, CPUE was used as the response variable TABLE 3. Mantel P value results from binomial Mantel’s tests on dolphin presence/absence data from 2004 and 2005 grouped by zone. Atlantic Central Gulf Test type and response variable P P P Global Mantel tests Explanatory on dolphins Space on dolphins Space on explanatory Explanatory on dolphins accounting for space Space on dolphins accounting for explanatory 0.023 0.511 0.001 0.016 0.714 0.007 0.967 0.001 0.001 1 0.088 0.509 0.001 0.071 0.847 Spatial autocorrelation of explanatory variables Temperature Salinity Turbidity Chlorophyll a Percentage of dissolved oxygen Distance from mud banks (log þ 1) CPUE (log þ 1) DPPUE (log þ 1) MPUE (log þ 1) SPUE (log þ 1) 0.002 1 0.144 1 NA 0.001 0.001 0.001 0.001 0.001 0.001 0.001 0.001 0.001 0.001 0.95 0.001 0.001 0.001 0.001 0.001 0.001 NA 0.575 NA 1 0.001 0.001 0.001 0.001 Pure partial Mantel’s tests Temperature Salinity Turbidity Chlorophyll a Percentage of dissolved oxygen Distance from mud banks (log þ 1) CPUE (log þ 1) DPPUE (log þ 1) MPUE (log þ 1) SPUE (log þ 1) Space 0.56 0.83 0.326 0.842 NA 0.959 0.001 0.064 0.473 0.506 0.817 0.993 0.069 0.515 0.002 0.001 0.179 0.003 0.998 0.573 0.786 0.962 0.497 0.041 NA 0.01 NA 0.4 0.041 0.959 0.447 0.842 0.188 Notes: Values in boldface type are significant using the 0.09 cutoff. NA values for percentage of dissolved oxygen are a result of a broken sensor during fieldwork. ‘‘Explanatory’’ signifies explanatory variables; ‘‘dolphins’’ signifies dolphin presence/absence; ‘‘Space’’ signifies the geographic distance between data points. See Table 1 for an explanation of abbreviations. See Methods: Analysis: Mantel’s tests for explanation of tests. NA values are due to a strong correlation between turbidity and chlorophyll a, making it necessary to remove turbidity from the analysis (turbidity was not significant without chlorophyll a in the data set). October 2008 MODELING MARINE PREDATOR HABITAT 1711 PLATE 1. Bottlenose dolphins swimming in shallow, seagrass habitat within the Central zone of Florida Bay, Florida (USA). Photo credit: L. G. Torres. tested in the second step of this exploratory exercise (GAMs of trawl catch) and in the FISH ; ENV models of H0 1 and H0 2. Despite using different data sets to create GAM models of CPUE and dolphin distribution, results from this exploratory exercise showed strong evidence that dolphins and fish catch responded similarly to the same environmental variables. Fig. 4 compares GAM plots between significant variables related to CPUE with GAM plots of binomial dolphin distribution vs. the same variables in each zone. Each zonal GAM of CPUE ; ENV returned bottom type and one water quality variable as significant explanatory variables. Salinity and bottom type were the significant predictor variables of trawl catch in the Atlantic zone. The GAM plots comparing the effects of salinity on fish catch and dolphin distribution showed that a similar range of salinity had a positive effect on both response variables (Fig. 4a). More fish we caught at salinity levels ,37 ppt and in the GAM plot of dolphin presence/ absence a similar range of salinity, ,38 ppt, had a positive effect on dolphin presence. Moreover, the same bottom types had similar effects on CPUE and dolphin presence in the Atlantic zone: intermediate seagrass was positively associated with both dolphin presence and CPUE, while hard bottom habitats were negatively correlated with both dolphin presence and CPUE. In the Central zone, more fish were caught in habitats with salinity levels .47 ppt and in mud or mud bank bottom types (Fig. 4b). The GAM plots of dolphin presence/absence depict that the same habitats had a positive impact on dolphin presence: salinity . 47 ppt and in mud and mud bank bottom types. Sparse seagrass habitats had negative effects on both CPUE and dolphin presence. These GAM plots indicate that both dolphins and fish responded positively to the hypersaline conditions of the Central zone. Chlorophyll a was significantly correlated with both CPUE and dolphin distribution in the Gulf zone. Plots from the Gulf zone GAM models show that chlorophyll a values between ;1.5 and 4 lg/L had a positive influence on dolphin presence and CPUE (Fig. 4c). The effects of bottom type were less congruent in the Gulf zone; only intermediate seagrass and mud bank habitats had positive effects on both dolphin presence and CPUE. H0 1.—The predictive capacity of dolphin habitat by the four model types created from 2004 data and tested by each 2005 dolphin survey is described in Appendix F. The TSS for all prediction maps ranged from a low of 0.3087, poor predictive capacity, to a high of 0.7377, very good predictive capacity. For every 2005 survey day used to validate the four model types, the resulting TSS values were used to rank each set of four models. The 1712 LEIGH G. TORRES ET AL. Ecological Applications Vol. 18, No. 7 October 2008 MODELING MARINE PREDATOR HABITAT TABLE 4. Overall model performance by the four tested model types in hypothesis 1 (H0 1; see Methods: Hypothesis testing: H0 1). Model Dolphin Dolphin Dolphin FISH ; ; ENV þ FISH ; ENV ; FISH ENV Sum of TSS ranks 14 10 18 11 Mean TSS value 0.0055 0.2644 0.0807 0.2407 Percentage of foraging sightings predicted 12.50 62.50 0 87.50 Notes: The generalized additive models (GAMs) were trained with 2004 data and tested by dolphin presence and absence from 2005 surveys. Predictive capacity is assessed in three ways: the sum of true skill statistic (TSS) ranks (lower rank indicates a higher TSS, which means better performance), the mean TSS for all survey dates, and the percentage of observed foraging sightings on each survey date correctly predicted by the model. highest TSS value received a rank of one and the lowest TSS value received a rank of four. The overall evaluation of predictive performance by the four model types was determined using three ranking methods: sum of TSS ranks, mean TSS value, and the percentage of foraging sightings correctly predicted (Table 4). The order of predictive performance by the four model types was identical between the sum of TSS ranks and the average TSS value. These two evaluation methods determined that the DOLPHIN ; ENV models performed best, but only slightly better than the FISH ; ENV models. However, the ability of the DOLPHIN ; ENV models to predict foraging habitat was 25% worse than the ability of the FISH ; ENV models. The FISH ; ENV models were able to correctly predict dolphin foraging locations 87.5% of the time. The predictive capacity of the DOLPHIN ; ENV þ FISH models placed third, with an average TSS value only marginally better than random. Those models that attempted to predict dolphin distribution based on fish distribution alone, DOLPHIN ; FISH, performed the worst and were able to predict 0% of dolphin foraging sightings. H0 2.—Predictive maps of 2003 dolphin distribution produced by GAM models of 2002 CPUE ; ENV were evaluated by the TSS and percentage of foraging sightings correctly predicted (Appendix G). Only 7 of 36 predictive maps produced a TSS score of zero or less. 1713 TABLE 5. Overall predictive capacity results of dolphin distribution by zone for hypothesis 2 (H0 2). Zone Atlantic Central Eastern Gulf Western and Flamingo Total, all zones No. surveys tested Mean TSS for all models 7 8 5 6 10 0.5251 0.6557 0.3145 0.2247 0.2326 36 0.3905 Percentage of foraging sightings correctly predicted (ratio) 60 86 76 80 100 (3/5) (6/7) (2/3) (4/5) (10/10) 83 (25/30) Notes: Models of dolphin presence/absence were trained by data from 2002 trawls (CPUE ; ENV) and tested by 2003 dolphin surveys. The ratio for percentage of foraging sightings correctly predicted is the number of foraging sightings correctly predicted divided by the number of foraging sightings observed. TSS, true skill statistic. Two maps had perfect predictive capacity and three other maps produced a TSS of 0.80 or higher. The five 2002 models of CPUE ; ENV produced positive mean TSS values ranging from 0.2247 to 0.6557 when validated by 2003 observed presence and absence locations (Table 5). The mean TSS value for all 36 predictive maps was 0.3905, denoting that the maps performed on average 40% better at predicting dolphin habitat than random guessing would have produced. Additionally, each zone model was able to predict 60% or more of all dolphin foraging locations, including 100% accuracy in the combined region of the Western and Flamingo zones. In total, habitat models of high fish abundance generated by 2002 trawl data accurately predicted 83% of all dolphin foraging sightings observed in 2003 in Florida Bay. DISCUSSION Our results indicate that incorporating prey data as an explanatory variable into fine-scale models of dolphin habitat selection within a heterogeneous environment does not improve predictive capacity. However, predictive modeling of prey distribution based on environmental variability did produce high predictive performance of dolphin habitat selection, particularly foraging habitat. This relationship between dolphin habitat and the habitat preferences of their prey is FIG. 4. Generalized additive model (GAM) plot comparison between significant explanatory variables for dolphin distribution (upper plots in each group of panels) and catch per unit effort (CPUE; lower plots in each group of panels) in the (a) Atlantic, (b) Central, and (c) Gulf zones based on data from 2004 and 2005. The data sets used to fit each GAM and the resulting models are described in the right column adjacent to the plots from that model. Bottom type (plots in central column) was a significant explanatory variable in all GAMs. The left column for each zone compares plots of the same explanatory variable related to dolphin presence/absence and CPUE. The dashed horizontal black lines represent the zero line in each plot. The vertical dotted lines delineate the points at which the response curves move above or below the zero line. The dotted lines bracketing the response curves are twice the standard error and function as confidence limits of the model. Tick marks on the x-axis represent sampling intensity. Note the different scales on the y-axis between plots. Abbreviations: DOLPHIN, dolphin presence/absence; D, dense seagrass; H, hard bottom; HS, hard bottom with seagrass; I, intermediate seagrass; M, mud; MB, mud bank; P, patchy seagrass; S, sand; SP, sparse seagrass. 1714 LEIGH G. TORRES ET AL. corroborated by the exploratory exercise that depicted an overall congruency of dolphin distribution and fish catch response to the same environmental characteristics. While it is difficult to distinguish whether dolphin predators are tracking their prey, or the resources of their prey, the FISH ; ENV approach to dolphin habitat modeling successfully used environmental characteristics as proxies of prey distribution to predict dolphin distribution. We conclude from model testing of H0 1 that the DOLPHIN ; ENV or FISH ; ENV models were the most appropriate to predict fine-scale dolphin habitat selection. Why did those models of dolphin distribution that included fish catch data (DOLPHIN ; ENV þ FISH and DOLPHIN ; FISH) not perform as well? It is likely that the scale of fish sampling was inappropriate for such a fine-scale study. Prey items are able move between habitats within a grain size of 50 m on a weekly or possibly daily basis, and our fish sampling scheme was unable to capture such variability. The assumption that the spatial distribution of the fish community does not change during a three-month summer field season was incorrect, leading to imprecise seasonal fish catch grids. Conversely, the more frequent habitat quality sampling enabled greater spatial and temporal resolution, allowing us to capture this fine-scale variability. Therefore, those models of dolphin distribution that used only environmental factors as explanatory variables (DOLPHIN ; ENV) were more successful because of the increased spatial and temporal resolution at which these parameters were sampled. The scale at which data are collected and analyzed has important consequences to model output (Levin 1992, Guisan et al. 2005, Redfern et al. 2006), and previous studies have also encountered scale-dependent relationships between marine predators and their prey (Schneider and Piatt 1986, Piatt and Methven 1992, Fauchald et al. 2000, Guinet et al. 2001). The FISH ; ENV models performed well because there is no issue of spatial or temporal scale associated with these models. At every trawl location, environmental quality was sampled in situ. No spatial interpolations or temporal assumptions were necessary to associate fish catch rates with environmental variability. Therefore, when these models of fish catch based on environmental characteristics were produced, there were no residual effects of scale to misrepresent the factors influencing fish catch distribution. The FISH ; ENV models in H0 1 and H0 2 predicted fish catch well and the dolphin predators distributed themselves appropriately, with 83% of 2003 and almost 90% of 2005 foraging sightings correctly predicted. These results reveal a strong spatial coupling between foraging habitat and areas of increased fish catch. Therefore, due to the importance of identifying feeding areas in conservation modeling applications and the lack of scaling issues associated with the FISH ; ENV models, we believe that fine-scale predictions of top marine predator distribution can be Ecological Applications Vol. 18, No. 7 reliably produced by understanding and modeling the environmental factors that determine prey distribution. Mismatches between the distributions of predator and prey may be due to their mutual responses to each other at various temporal and spatial scales. For instance, the divergence of bottom type influence in the Gulf zone between dolphin presence and areas of high fish catch (Fig. 4c) may be due to an increased encounter rate in this zone of Florida Bay with sharks of the size and species that may modify the distribution of dolphins (Heithaus 2001, Torres et al. 2006, Wiley and Simpfendorfer 2007). Therefore, predictive models of marine predator habitat use can either attempt to incorporate all variables relevant to predator–prey interactions (i.e., anti-predator tactics, resource availability, predation and competition effects, density-dependent relationships), which most models cannot do (Redfern et al. 2006), or focus on those variables with weaker or no response to predator and prey distribution (ENV). The latter option provides a simpler and effective approach to modeling marine predator habitat based on the distribution of the resources of their prey, as demonstrated in this study. The link between dolphins and environment is easier to model than the relationship between dolphins and their prey because both predator and prey are mobile and biotic. At small spatial scales, in variable coastal ecosystems, it appears ineffective to predict the distribution of one complex biotic predator based on the complex distribution patterns of multiple biotic prey items, especially because these two interact at multiple spatial and temporal scales. Despite conducting almost 400 trawls in Florida Bay, our fish sampling methods were too coarse grained in time and space to accurately describe overlap between dolphins and their prey at the fine scale at which these data were applied. To successfully incorporate prey distribution data into our predictive models in Florida Bay we could have increased the spatial scale, thus leading to a loss of predictive resolution. Alternatively, we could have trawled at a frequency equal to that of our environmental quality sampling scheme, achieving an increased resolution of fish distribution but decreasing time allotted to dolphin surveys. Another option would have been to employ a prey sampling method with increased sampling resolution. Benoit-Bird and Au (2003) accredit their ability to identify congruent distribution patterns between spinner dolphins and their prey at multiple spatial and temporal scales to an echo sounder that simultaneously measured the abundance of dolphins and prey in the water column. In lieu of such a synchronous sampling protocol, our results suggest that, due to high habitat heterogeneity and the spatial variability of prey patches, fine-scale models of marine predator habitat selection in coastal habitats will be more successful if environmental variables are used as proxies of both prey and predator distributions rather than relying on direct prey distribution data. Although we do not believe our fish sampling gear captured all October 2008 MODELING MARINE PREDATOR HABITAT potential prey items of dolphins in Florida Bay, we are confident that the bottom trawl sampled a large majority of dolphin prey, revealing relative abundance of prey across the heterogeneous landscape. The issue of appropriate sampling technique highlights another reason why relying on prey data alone to model predator distribution is challenging. It is unlikely that one sampling method will be able to capture all possible prey items of opportunistic foragers, such as dolphins, within a dynamic ecosystem. Moreover, it is difficult to merge fish catch data sets collected with different gear types due to effort biases. We conclude that methods and scales of prey data collection and incorporation into models must be appropriate and considered with forethought. For instance, depending on the spatial coupling between predators and their prey, direct prey data may be more effective in models of pelagic predator distribution. Models for pelagic ecosystems are typically applied to larger spatial extents but provide decreased spatial resolution. The resulting larger grid cells allow greater predictability of prey, which, in conjunction with minimal prey refuges, may allow increased predictability of predators based on direct prey data. Again, due to the patchy nature of fish distribution and abundance, fish sampling intensity must be such that the applied grain size is able to realistically represent the spatial and temporal variability of the ecosystem. As apex predators, bottlenose dolphins are frequently considered an indicator of healthy habitats (Caro and O’Doherty 1999, Torres and Urban 2005). However, the mere presence of dolphins does not necessarily imply a healthier habitat, but a sighting of foraging dolphins does indicate a habitat that provides an important feeding opportunity. Therefore, because marine predators such as dolphins preferentially select different habitat characteristics when foraging as compared to socializing, traveling, or resting, behavior data should be incorporated when using predators as an indicator of relative habitat health. CONCLUSIONS The results of our study suggest that high predictive capacity of fine-scale marine predator habitat selection can be achieved without including prey distribution data as a predictor variable in the model. Fish aggregations can be ephemeral, leading to poor performance as a spatial proxy for predator distribution unless prey is sampled at an appropriate intensity. Unfortunately, prey sampling demands more time, skill, and money than measuring environmental conditions, and managers of marine predator populations typically face limits on funding, time, and expertise. Using the example predator in this study, managers are left with two options to model dolphin distribution at fine scales. Both options use environmental characteristics as explanatory variables but have different response variables: DOLPHIN ; ENV or FISH ; ENV. 1715 Predictive maps of dolphin distribution based on FISH ; ENV models performed with similar success as DOLPHIN ; ENV models, but were appreciably better at predicting dolphin foraging habitat, proving tight spatial links between foraging dolphins, their prey community, and their environment. Due to inadequate prey sampling, our models including fish catch data as an explanatory variable (DOLPHIN ; ENV þ FISH and DOLPHIN ; FISH) were unable to account for the spatial variation of fish distribution, and subsequently the spatial relationship between dolphin presence and high prey abundance decoupled. In a dynamic coastal environment, high sampling intensity is necessary to successfully incorporate explanatory variables of prey into fine-scale predictive models of predator distribution due to the complex habitat selection patterns of both predator and prey. However, because the environmental dynamics that aggregate prey are more consistent, more limited prey sampling can be conducted to develop accurate models of prey distribution based on environmental predictors. These models can then be applied to predict marine predator distribution based on the proxy relationships between predator, prey, and environment. ACKNOWLEDGMENTS Data were collected under Everglades National Park permits EVER-2002-SCI-0049, EVER-2003-SCI-0042, EVER-2004SCI-0062, and EVER-2005-SCI-0062, General Authorizations 911-1466 and 572-1639, and approved by the Duke University Institutional Animal Care and Use Committee (IACUC). Funding and support was provided by the NOAA/Coastal Ocean Program, the Dolphin Ecology Project, the Florida Keys National Marine Sanctuary, and the Duke University Marine Lab. Data were provided by the SERC-FIU Water Quality Monitoring Network, which is supported by SFWMD/SERC Cooperative Agreement #C-15397 as well as EPA Agreement #X994621-94-0. Todd Chandler, Kate Freeman, Gretchen Lovewell, Erica Morehouse, Liz Tuoy-Sheen, Anne Starling, Danielle Waples, and Margaret Worthington assisted with fieldwork. We also thank two anonymous reviews for helpful comments on this manuscript. LITERATURE CITED Allen, M. C., A. J. Read, J. Gaudet, and L. S. Sayigh. 2001. Fine-scale habitat selection of foraging bottlenose dolphins Tursiops truncatus near Clearwater, Florida. Marine Ecology Progress Series 222:253–264. Allouche, O., A. Tsoar, and R. Kadmon. 2006. Assessing the accuracy of species distribution models: prevalence, kappa and the true skill statistic (TSS). Journal of Applied Ecology 43:1223–1232. Barros, N. B. 1987. Food habits of bottlenose dolphins (Tursiops truncatus) in the southeastern United States, with special reference to Florida waters. Thesis. University of Miami, Coral Gables, Florida, USA. Barros, N. B. 1993. Feeding ecology and foraging strategies of bottlenose dolphins on the central east coast of Florida. Dissertation. University of Miami, Coral Gables, Florida, USA. Barros, N. B., and D. K. Odell. 1990. Food habits of bottlenose dolphins in the southeastern United States. Page 653 in S. Leatherwood and R. R. Reeves, editors. The bottlenose dolphin. Academic Press, San Diego, California, USA. 1716 LEIGH G. TORRES ET AL. Barros, N. B., and R. S. Wells. 1998. Prey and feeding patterns of resident bottlenose dolphins (Tursiops truncatus) in Sarasota Bay, Florida. Journal of Mammalogy 79:1045– 1059. Baumgartner, M. F., K. Mullin, L. N. May, and T. D. Leming. 2000. Cetacean habitats in the northern Gulf of Mexico. Fisheries Bulletin 99:219–239. Benoit-Bird, K. J., and W. W. L. Au. 2003. Prey dynamics affect foraging by a pelagic predator (Stenella longirostris) over a range of spatial and temporal scales. Behavioral Ecology and Sociobiology 53:364–373. Boyer, J. N., J. W. Fourqurean, and R. D. Jones. 1999. Seasonal and long-term trends in the water quality of Florida Bay (1989–1997). Estuaries 22:417–430. Brotons, L., W. Thuiller, M. B. Araujo, and A. H. Hirzel. 2004. Presence–absence versus presence-only modelling methods for predicting bird habitat suitability. Ecography 27:437–448. Buckland, S. T., D. R. Anderson, K. P. Burnham, J. L. Laake, D. L. Borchers, and L. Thomas. 2001. Introduction to distance sampling: estimating abundance of biological populations. Oxford University Press, New York, New York, USA. Burnham, K. P., and D. R. Anderson. 1998. Model selection and inference: a practical information-theoretic approach. Springer-Verlag, New York, New York, USA. Caro, T. M., and G. O’Doherty. 1999. On the use of surrogate species in conservation biology. Conservation Biology 13: 805–814. Cox, T., et al. 2006. Understanding the impacts of anthropogenic sound on beaked whales. Journal of Cetacean Research and Management 7:177–187. D’Amico, A., A. Bergamasco, P. Zanasca, S. Carniel, E. Nacini, N. Portunato, V. Teloni, C. Mori, and R. Barbanti. 2003. Qualitative correlation of marine mammals with physical and biological parameters in the Ligurian Sea. IEEE Journal of Oceanic Engineering 28:29–43. Davis, R., G. S. Fargion, N. May, T. D. Leming, M. Brumgartner, W. E. Evans, L. J. Hansen, and K. Mullin. 1998. Physical habitat of cetaceans along the continental slope in the north-central and western Gulf of Mexico. Marine Mammal Science 14:490–507. Durako, M., M. O. Hall, and M. Merello. 2002. Patterns of change in the seagrass dominated Florida Bay hydroscape. Pages 523–537 in J. W. Porter and K. G. Porter, editors. The Everglades, Florida Bay, and coral reefs of the Florida Keys: an ecosystem sourcebook. CRC Press, Boca Raton, Florida, USA. Engler, R., A. Guisan, and L. Rechsteiner. 2004. An improved approach for predicting the distribution of rare and endangered species from occurrence and pseudo-absence data. Journal of Applied Ecology 41:263–274. Fauchald, P. K., E. Erikstad, and H. Skarsfjord. 2000. Scaledependent predator–prey interactions: the hierarchical spatial distribution of seabirds and prey. Ecology 81:773–783. Ferguson, M. C., J. Barlow, P. Fiedler, S. B. Reilly, and T. Gerrodette. 2006a. Spatial models of delphinid (family Delphinidae) encounter rate and group size in the eastern tropical Pacific Ocean. Ecological Modelling 193:645–662. Ferguson, M. C., J. Barlow, S. B. Reilly, and T. Gerrodette. 2006b. Predictive Cuvier’s (Ziphius cavirostris) and Mesoplodon beaked whale densities as functions of the environment in the eastern tropical Pacific Ocean. Journal of Cetacean Research Management 7:287–299. Forney, K. A. 1999. Trends in harbour porpoise abundance off central California, 1986–1995: Evidence for interannual changes in distributions? Journal of Cetacean Research Management 1:73–80. Forney, K. A. 2000. Environmental models of cetacean abundance: reducing uncertainty in populations trends. Conservation Biology 14:1271–1286. Ecological Applications Vol. 18, No. 7 Fourqurean, J. W., and M. B. Robblee. 1999. Florida Bay: a history of recent ecological changes. Estuaries 22:345–357. Gaertner, J. C. 2000. Seasonal organization patterns of demersal assemblages in the Gulf of Lions (north-western Mediterranean Sea). Journal of Marine Biological Association of the United Kingdom 80:777–783. Gregr, E. J., and A. W. Trites. 2001. Predictions of critical habitat for five whale species in the waters of coastal British Columbia. Canadian Journal of Fish and Aquatic Science 58: 1265–1285. Guinet, C., L. Dubroca, M.-A. Lea, S. Goldsworthy, Y. Cherel, G. Duhamel, F. Bonadonna, and J.-P. Donnay. 2001. Spatial distribution of foraging in female Antarctic fur seals Arctocephalus gazella in relation to oceanographic variables: a scale-dependent approach using geographic information systems. Marine Ecology Progress Series 219:251–264. Guisan, A., T. C. Edwards, and T. Hastie. 2002. Generalized linear and generalized additive models in studies of species distributions: setting the scene. Ecological Modelling 157:89– 100. Guisan, A., W. Thuiller, and N. Gotelli. 2005. Predicting species distribution: offering more than simple habitat models. Ecology Letters 8:993–1009. Guisan, A., and N. E. Zimmermann. 2000. Predictive habitat distribution models in ecology. Ecological Modelling 135: 147–186. Hall, M. O., M. Durako, J. W. Fourqurean, and J. C. Zieman. 1999. Decadal changes in seagrass distribution and abundance in Florida Bay. Estuaries 22:445–459. Hamazaki, T. 2002. Spatiotemporal prediction models of cetacean habitats in the mid-western north Atlantic Ocean (from Cape Hatteras, North Carolina, U.S.A. to Nova Scotia, Canada). Marine Mammal Science 18:920–939. Hastie, G. D., B. Wilson, L. J. Wilson, K. M. Parsons, and P. M. Thompson. 2004. Functional mechanisms underlying cetacean distribution patterns: hotspots for bottlenose dolphins are linked to foraging. Marine Biology 144:397–403. Hastie, T. J., and R. J. Tibshirani. 1990. Generalized additive models. Chapman and Hall/CRC, Boca Raton, Florida, USA. Hedley, S. L., S. T. Buckland, and D. L. Borchers. 1999. Spatial modelling from line transect data. Journal of Cetacean Research Management 1:255–264. Heithaus, M. R. 2001. Predator–prey and competitive interactions between sharks (order Selachii) and dolphins (suborder Odontoceti): a review. Journal of Zoology 253:53–68. Heithaus, M. R., and L. M. Dill. 2002. Food availability and tiger shark predation risk influence bottlenose dolphin habitat use. Ecology 83:480–491. Heithaus, M. R., and L. M. Dill. 2006. Does tiger shark predation risk influence foraging habitat use by bottlenose dolphins at multiple spatial scales? Oikos 114:257–264. Hooker, S. K., H. Whitehead, and S. Gowans. 1999. Marine protected area design and the spatial and temporal distribution of cetaceans in a submarine canyon. Conservation Biology 13:592–602. Hugie, D. M., and L. M. Dill. 1994. Fish and game: a game theoretic approach to habitat selection by predators and prey. Journal of Fish Biology 45:151–169. Levin, S. A. 1992. The problem of pattern and scale in ecology. Ecology 73:1943–1967. Lima, S. L. 2002. Putting predators back into behavioral predator–prey interactions. Trends in Ecology and Evolution 17:70–75. Logwerwell, E. A., and N. B. Hargreaves. 1996. The distribution of sea birds relative to their fish prey off Vancouver Island: opposing results at large and small spatial scales. Fisheries Oceanography 5:163–175. MacKenzie, D. I., J. D. Nichols, G. B. Lachman, S. Droege, J. A. Royal, and C. Langtimm. 2002. Estimating site October 2008 MODELING MARINE PREDATOR HABITAT occupancy rates when detection probabilities are less than one. Ecology 83:2248–2255. Mantel, N. 1967. The detection of disease clustering and a generalized regression approach. Cancer Research 27:209– 220. Matheson, R. E. J., D. K. Camp, S. M. Sogard, and K. A. Bjorgo. 1999. Changes in seagrass-associated fish and crustacean communities in Florida Bay mud banks: The effects of recent ecosystem changes? Estuaries 22:534–551. McIvor, C. C., J. A. Ley, and R. D. Bjork. 1994. Changes in freshwater inflow from the Everglades to Florida Bay including effects on biota and biotic processes: a review. Pages 117–146 in S. M. Davis and J. C. Ogden, editors. Everglades: the ecosystem and its restoration. St. Lucie Press, Delrey Beach, Florida, USA. Oksanen, J., and P. R. Minchin. 2002. Continuum theory revisited: What shape are species responses along ecological gradients? Ecological Modelling 157:119–129. Piatt, J. F., and D. A. Methven. 1992. Threshold foraging behavior of baleen whales. Marine Ecology Progress Series 84:205–210. Redfern, J. V., et al. 2006. Techniques for cetacean-habitat modeling. Marine Ecology Progress Series 310:271–295. Rushton, S. P., S. J. Ormerod, and G. Kerby. 2004. New paradigms for modelling species distributions? Journal of Applied Ecology 41:193–200. Schick, R. S., and D. Urban. 2000. Spatial components of bowhead whale (Balaena mysticetus) distribution in the Alaskan Beaufort Sea. Canadian Journal of Fish and Aquatic Science 57:2193–2200. Schneider, D., and J. F. Piatt. 1986. Scale-dependent correlation of seabirds with schooling fish in a coastal ecosystem. Marine Ecology Progress Series 32:237–246. Segurado, P., and M. B. Araujo. 2004. An evaluation of methods for modelling species distributions. Journal of Biogeography 31:1555–1568. Sih, A. 1998. Game theory and predator–prey response races. Pages 221–238 in L. A. Dugatkin and H. K. Reeve, editors. Advances in game theory and the study of animal behavior. Oxford University Press, New York, New York, USA. Sogard, S. M., G. V. N. Powell, and J. G. Holmquist. 1989. Spatial distribution and trends in abundance of fishes residing in seagrass meadows on Florida Bay mudbanks. Bulletin of Marine Science 44:179–199. Thayer, G. W., and A. J. Chester. 1989. Distribution and abundance of fishes among basin and channel habitats in Florida Bay. Bulletin of Marine Science 44:200–219. Thayer, G. W., G. V. N. Powell, and D. E. Hoss. 1999. Composition of larval, juvenile, and small adult fishes relative to changes in environmental conditions in Florida Bay. Estuaries 22:518–533. Torres, L. G., M. R. Heithaus, and B. Delius. 2006. Influence of teleost abundance on the distribution and abundance of sharks in Florida Bay, USA. Hydrobiologia 596:449–455. Torres, L. G., P. E. Rosel, C. D’Agrosa, and A. J. Read. 2003. Improving management of overlapping bottlenose dolphin ecotypes through spatial analysis and genetics. Marine Mammal Science 19:502–514. Torres, L. G., and D. Urban. 2005. Using spatial analysis to assess bottlenose dolphins as an indicator of healthy fish habitat. Pages 423–435 in S. A. Bortone, editor. Estuarine indicators. CRC Press, Boca Raton, Florida, USA. Vaughan, I. P., and S. J. Ormerod. 2005. The continuing challenges of testing species distribution models. Journal of Applied Ecology 42:720–730. Wiley, T. R., and C. A. Simpfendorfer. 2007. The ecology of elasmobranchs occurring in the Everglades National Park, Florida: implications for conservation and management. Bulletin of Marine Science 80:171–189. Zieman, J. C., J. W. Fourqurean, and R. L. Iverson. 1989. Distribution, abundance and productivity of seagrasses and macroalgae in Florida Bay. Bulletin of Marine Science 44: 292–311. APPENDIX A Methods on the calibration of YSI-based chlorophyll a readings (Ecological Archives A018-059-A1). APPENDIX B Pseudo-absences generation (Ecological Archives A018-059-A2). APPENDIX C Explanation of Mantel’s tests (Ecological Archives A018-059-A3). APPENDIX D Model evaluation (Ecological Archives A018-059-A4). APPENDIX E Exploratory exercise (Ecological Archives A018-059-A5). APPENDIX F Predictive results for hypothesis 1 (H0 1) (Ecological Archives A018-059-A6). APPENDIX G Predictive results for hypothesis 2 (H0 2) (Ecological Archives A018-059-A7). View publication stats 1717