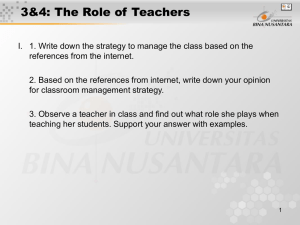
Measurement 45 (2012) 2299–2308 Contents lists available at SciVerse ScienceDirect Measurement journal homepage: www.elsevier.com/locate/measurement Analytical estimation of coordinate measurement uncertainty Władysław Jakubiec, Wojciech Płowucha, Marcin Starczak ⇑ University of Bielsko-Biała, Laboratory of Metrology, Poland a r t i c l e i n f o Article history: Available online 15 October 2011 Keywords: Coordinate measurement uncertainty Task-related uncertainty Type B method Geometrical product specification a b s t r a c t The paper presents the assumptions and theoretical background of analytical method of estimation the coordinate measurement uncertainty. The uncertainty for each characteristic is estimated separately. Mathematical model for each characteristic uses the minimal number of so-called ‘‘characteristic points’’ of the measured workpiece. Each characteristic is defined by a formula presented in a form where it is a function of coordinates’ differences’ of characteristic points. The uncertainty budget for the coordinates’ differences includes influences of particular geometrical errors of CMM, probing system errors, as well as temperature errors. The applied algorithms of uncertainty estimation use the type B method according to the rules of GUM. The paper presents also the operational rules of software for the estimation of coordinate measurements uncertainty. The software covers 48 measurement models. The software is oriented on the ease of use. All necessary information concerning the accuracy of the used CMM are implemented by software provider. The basic version of the software includes the minimal database of the styli, but on demand the styli of particular customer can be implemented. Ó 2011 Elsevier Ltd. All rights reserved. 1. Introduction The measurement uncertainty is very important part of the measurement result. The quality management systems require documented uncertainty of measurement for most important characteristics of manufactured parts. Nowadays, in machine industry and especially in automobile and aviation industry, the fundamental measuring technique are coordinate measurements. A significant number of publications in area of CMMs performances and ensuring their traceability is a prove of that fact [1,2]. The problematic of estimation the coordinate measurement uncertainty is a subject of research conducted by many research centres, especially PTB [3,4] and NPL [5]. There are two standardising documents considering the uncertainty of coordinate measurements [6,7]. Both recall mainly the type B method according to GUM [8]. The most significant difference between the documents is that in the ⇑ Corresponding author. E-mail address: mstarczak@ath.bielsko.pl (M. Starczak). 0263-2241/$ - see front matter Ó 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.measurement.2011.09.027 first case it is necessary to have a calibrated workpiece and for the second case – a simulation software. The document which considers computer simulation [7] describes requirements which the software has to fulfil. In particular these requirements apply to the ways of providing the information on errors considered and not considered in the uncertainty budget. Such requirements apply to all methods of uncertainty evaluation and especially analytical methods. In this paper the theoretical backgrounds as well as the algorithms for analytical estimation of coordinate measurement uncertainty estimation in accordance with type B method [8] are presented. The way of operation of the software elaborated by authors is also described. 2. Theoretical backgrounds Theoretical backgrounds for the software for analytical evaluation of uncertainty of coordinate measurements are as follows (some of those were described in details in previous works, e.g. [9–11]): 2300 W. Jakubiec et al. / Measurement 45 (2012) 2299–2308 in coordinate measurements it is necessary to evaluate the uncertainty separately for each characteristic (‘‘characteristic’’ is understood as particular dimensions and geometrical deviations), since the geometrical errors of a CMM are important source of measurement errors, the presented software (similarly as in computer simulation) uses commonly accepted kinematic model of a CMM (developed by PTB) and the associated model of error propagation; the identification of the geometrical errors can be done basing on the results of CMM calibration by means of ball-plate [4,12], each characteristic is presented in appropriate model by the use of minimal number of characteristic points of the measured workpiece; the characteristic points can be surface points, point of axis, centre point of sphere; the characteristic points of a surface represent the actual probing points – they are chosen from the contour of the probed surface; characteristic points of axes are centre points of circles – they are chosen close to extreme cross-sections of hole/shaft [11], the method includes analysis of influence of CMM errors on particular geometrical deviations direct – the model of particular characteristic uses all characteristic points of the workpiece, for both: datum features’ points and toleranced features’ points (in the computer simulation a decomposition of the measuring task is performed to evaluate uncertainty for particular characteristic – the first stage involves calculating associated geometrical Fig. 1. Coaxiality deviation: (a) design drawing with the geometrical tolerance and characteristic points and (b) measurement model (coaxiality deviation is equal to doubled value of the distance of the point S from the straight line AB). The methodology of coordinate measurement uncertainty estimation presented on the example of measurement of coaxiality deviation (Fig. 1) is as follows: The formula expressing the measured characteristic (coaxiality deviation), and more precisely distance of point S from straight line AB, as a function of coordinates’ differences of workpiece characteristic points is in a form [11]: sffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi ðyAS zAB zAS yAB Þ2 þ ðzAS xAB xAS zAB Þ2 þ ðxAS yAB yAS xAB Þ2 lðS;ABÞ ¼ x2AB þ y2AB þ z2AB Particular elements in above formula are coordinates’ differences of points, e.g. xAB = xB xA. Since the measured characteristic in this case is a function of six variables, the combined uncertainty is calculated as: sffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi 2 2 2 2 2 2 @l @l @l @l @l @l ul ¼ uxAS þ uyAS þ uzAS þ uxAB þ uyAB þ uzAB @xAS @yAS @zAS @xAB @yAB @zAB elements from the probing points which include measurement errors, and in the second stage characteristics are calculated as relations between the geometrical elements [4]), the models of particular characteristics use different number (3–8) of characteristic points; the points should be distributed according to the strategy used in the measurement and the good measurement practice, the models of particular characteristics are derived from the formulae for point–point, point–straight line and point–plane distance [10], each characteristic is defined by a formula presented in a form where it is a function of coordinates’ differences’ of characteristic points of the workpiece [11], measurement uncertainty of particular characteristics is calculated as combined uncertainty (uncertainty of indirect measurement) [9], for estimation component uncertainties of particular coordinates’ differences of characteristic points the type B method is used [9], the uncertainty budget for the coordinates’ differences includes influences of particular geometrical errors of CMM, probing system errors, errors connected with probing strategy and especially number of probing points, as well as temperature errors (the paper gives only the budget for geometrical errors of CMM). In the above formula the component uncertainties are uncertainties of measurement of coordiantes’ differences of points uxAS , . . . , uzAB. The way of evaluating those uncertainties basing on knowledge on the CMM geometrical errors and probing head errors is essential element of the presented methodology. The influence of the CMM geometrical errors on the CMM error of indication in a point A is described as (Fig. 2): 2 3 2 3 2 3 2 3 exðAÞ xpxðAÞ ytxðAÞ ztxðAÞ 4 eyðAÞ 5 ¼ 4 xtyðAÞ 5 þ 4 ypyðAÞ 5 þ 4 ztyðAÞ 5 xtzðAÞ ytzðAÞ zpzðAÞ ezðAÞ 2 3 2 3 2 3 xrxðAÞ yrxðAÞ zrxðAÞ þ M 1 4 xryðAÞ 5 þ M 2 4 yryðAÞ 5 þ M3 4 zryðAÞ 5 xrzðAÞ yrzðAÞ zrzðAÞ 2 3 ywzðAÞ þ M 4 4 xwzðAÞ 5 xwyðAÞ where M1, . . . , M4 are matrices of weights depending on the design type of the CMM, its dimensions, the stylus used and coordinates of point A. The present version of presented software covers two models. The first one assumes that separate geometrical errors are uncorrelated. The second one (not described in 2301 W. Jakubiec et al. / Measurement 45 (2012) 2299–2308 Fig. 2. Kinematic model of a bridge type CMM with geometrical errors. this paper) assumes strict correlation among six translational and rotational errors. The measurement error of coordinates’ differences of points A and B is equal to difference of the indication errors of the CMM in points B and A: 2 exðABÞ 2 3 exðBÞ 3 2 exðAÞ 3 7 7 6 6 7 6 4 eyðABÞ 5 ¼ 4 eyðBÞ 5 4 eyðAÞ 5 ezðAÞ ezðBÞ ezðABÞ Transcribing from the matrix to classic notation it turns out that each of the three components of measurement error of coordinates’ differences is a sum of 11 components connected to geometrical errors of the CMM. For example, for a certain design type of CMM, 2 of 33 errors are of following form: ex1 ðABÞ ¼ xpxðBÞ xpxðAÞ ex4 ðABÞ ¼ zt B xryðxB Þ ztA xryðxA Þ The maximal possible value of each of the above errors is estimated on the basis of the function expressing maximal value of the difference of particular geometrical errors xpxM(l), assuming the coordinates’ difference l as the function argument. The definition of the function xpxM(l) is as follows (definitions of other functions are similar): xpxM ðlÞ ¼ max jxpxðxÞ xpxðx þ lÞj x Finally (e.g. for ex1(AB) and ex4(AB)): e1xM ¼ xpxM ðjxBA jÞ e4xM ¼ min jzt B j xryM ðjxBA jÞ þ xryM ðxA Þ jztB zt A j jzt A j xryM ðjxBA jÞ þ xryM ðxB Þ jztB zt A j The component uncertainties for particular coordinates’ differences we can calculate as follows (e.g. for uxAB, uyAB and uzAB it is similar): uxAB ¼ rffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi X11 2 kix eixM i¼1 The presented software besides geometrical errors consider also probing head errors and temperature error. 3. The measurement models for geometrical deviations The software covers 48 measurement models. Example models as the tolerance specification and respective sets of characteristic points are presented in the following figures. The pictures include all characteristic points of the workpiece. For almost all models following designation convention is assumed: A, B, . . . – points of datum elements, K, L, . . . , S – points of the toleranced element, the point S is the point for which the distance to other point, straight line or plane is the measurement model. Fig. 3 shows example models for dimensions: distance between centres of balls and for sizes. In case of distance between centre points of balls (Fig. 3a) the characteristic points A and B are the balls’ centre points. For the diameter of the circle (Fig. 3b) the point S is the centre point of the 2302 W. Jakubiec et al. / Measurement 45 (2012) 2299–2308 Fig. 4. The drawings from EMU software illustrating examples of form deviations for which the measurement uncertainty is calculated: (a) straightness, (b) flatness, (c) roundness, and (d) cylindricity. Fig. 3. The drawings from EMU software illustrating dimensions for which the measurement uncertainty is calculated: (a) distance between two centre points, (b) diameter, and (c) and (d) external size. circle. For the external sizes (parallel planes) two cases are distinguished. In the first (Fig. 3c), the size is measured as the distance of a point of one plane to the second plane (four characteristic points: three points of one plane and one point of the second). The second case (Fig. 3d) concerns the measurement of the size as distance between two points of opposite planes along the axis of the defined coordinate system (seven characteristic points: five for coordinate system definition and two for the dimension). Fig. 4 presents example models for the form deviations. For the straightness of axis (Fig. 4a) the characteristic points A and B are the external points of the axis and the point S is the middle point of the axis. For flatness (Fig. 4b) the characteristics points A, B and C are distributed on the contour of the measured element and the point S is the middle point of it. For roundness (Fig. 4c) the characteristic point S is the point of axis in the measured crosssection. For cylindricity (Fig. 4d) characteristic points S1 and S2 determine the limits of the area where the measurements of the deviation are performed. Fig. 5 shows example models for the orientation deviations. For parallelism of axes (Fig. 5a) the characteristic points are two external points (A and B) of datum axis and two external points (K and S) of the toleranced axis. For parallelism of axis in regard to plane (Fig. 5b) the characteristic points are three points of the datum plane (A–C) and two external points (K and S) of the toleranced axis. For parallelism of plane in regard to axis (Fig. 5c) the characteristic points are two external points (A and B) of the datum axis and three points of the toleranced plane (K, L and S). For parallelism of planes (Fig. 5d) the characteristic points are three points of the datum plane (A–C) and three W. Jakubiec et al. / Measurement 45 (2012) 2299–2308 2303 Fig. 5. The drawings from EMU software illustrating examples of orientation deviations for which the measurement uncertainty is calculated: (a–d) parallelism, (e–h) perpendicularity, and (i) angularity. points of the toleranced plane (K, S1 and S2). The models for perpendicularity are analogue to parallelism (Fig. 5e–h). The example model of angularity (Fig. 5i) includes eight characteristic points: five points (A–E) for definition of the coordinate system (datum system) and three points of the toleranced plane (K, S1 and S2). 2304 W. Jakubiec et al. / Measurement 45 (2012) 2299–2308 Fig. 6. The drawings from EMU software illustrating examples of location deviations for which the measurement uncertainty is calculated: (a–c) coaxiality, (d) and (e) position, and (f) symmetry. Fig. 6 depicts example models of location deviations. For coaxiality of two features (Fig. 6a) the characteristic points are external points (A and B) of the datum axis and one point of the toleranced axis (S). For coaxiality of axis in regard to common axis (Fig. 6b and c) the characteristic points are two points (A and B) of the features’ axes determining the common axis and one point (S) of the toleranced axis. In the most general case of the position of point in regard to datum system (Fig. 6d) the appropriate model includes seven characteristic points: three points (A–C) for the primary datum (plane), two (D, E) for the secondary datum (plane), one (F) for the tertiary datum (plane) and one for the toleranced point (S – centre point of a ball). For the typical example of the position of axis in regard to datum system (Fig. 6e) the appropriate model includes seven characteristic points: five points (A–E) for the datum system and two points (S1 and S2) for the toleranced axis. In the example of the symmetry of two symmetry planes (Fig. 6f) the model includes six characteristic points – three for both datum plane (A–C) and for the toleranced plane (S1, S2, S3). Fig. 7 shows example models for the run-out deviations. In each case the characteristic points are two points (A, B) on the datum axis (or common axis) and one point (S) on the toleranced surface. Fig. 7. The drawings from EMU software illustrating examples of runout deviations for which the measurement uncertainty is calculated: (a–c) run-out and (d) total run-out. Fig. 8 presents example models for profile any line/surface deviations. W. Jakubiec et al. / Measurement 45 (2012) 2299–2308 2305 Fig. 8. The drawings from EMU software illustrating examples of profile any line (a and b) and profile any surface and (c and d) for which the measurement uncertainty is calculated. Fig. 9. EMU software main window with a list of characteristics, for which the measurement uncertainty is calculated. Above this list, the menu with a group of characteristics (in the form of geometrical deviations icons) is visible. 4. Software operation The software is oriented on the ease of use. All necessary information concerning the accuracy of the used CMM are implemented by software provider. The basic version of the software includes the minimal database of the styli, but on demand the styli of particular customer can be implemented. The user task is to document the probing strategy for particular characteristics. User has to choose a characteristic and input necessary data, i.e. coordinates of characteristic points of the workpiece (in the CMM coordinate system) and styli parameters, and in some cases dimension (mostly diameter) of the element and number of probing points. In the main program window the user has to choose the group of deviations from the menu of characteristics 2306 W. Jakubiec et al. / Measurement 45 (2012) 2299–2308 Fig. 10. Choice of the measuring machine in the menu ‘‘Settings/ Machine’’. Fig. 11. The dialogue window for choosing the workpiece material. (Fig. 9). The characteristics implemented in the software are grouped according to classification given in ISO 1101 [13]. The meaning of particular icons of the characteristics menu is in accordance with ISO 1101 designations except for the following two: point–point distance measurement hole/shaft diameter measurement The software operates in following steps. Step 1. In case the user has more than one CMM, needs to chose first the particular machine for the measurement tasks for which the uncertainty has to be evaluated (Fig. 10). Step 2. User has to chose the material of the measured workpiece (Fig. 11). The software has implemented material database. Step 3. User chooses characteristic of inertest (Fig. 12) from the characteristics groups (Fig. 4). Step 4. For each characteristic a dialogue window is implemented where user can input the parameters concerned with the measurement strategy, which are (Fig. 13): coordinates of a few characteristic points of the measured workpiece, parameters of the stylus used for the measurement, number of probing points, diameter or size. The dialogue window includes a schematic drawing with particular characteristic (tolerance specification), required characteristic points and coordinate system. The workpiece orientation (along three axes) in the coordinate system can be changed by means of the button . The choice of particular orientation can help user to correctly input the data. All fields of the dialogue window have default values for the required parameters which can be freely changed. The parameters of the stylus used for the task (length and orientation) can be chosen from a combo box. Pressing the OK button starts the uncertainty evaluation. Step 5. After performing calculations for all necessary characteristics an extended report can be generated, which includes heading, with some basic information on the company, CMM and the workpiece. The report in the main part consists of all input data for each characteristic with the schematic drawing and the evaluated uncertainty value (Fig. 14). The developed software EMU enables evaluation of measurement uncertainty of dimensions but first of all – geometrical deviations. One has to underline that geometrical tolerances (form, orientation, location and run-out), Fig. 12. The dialogue window for choosing proper characteristic type. W. Jakubiec et al. / Measurement 45 (2012) 2299–2308 2307 Fig. 13. Example of dialogue window for inputting the necessary data for uncertainty evaluation of the measuring task (parallelism of axes deviation with cylindrical tolerance zone). Fig. 14. A fragment of the main part of the extended report with the data for the characteristic ‘‘parallelism of axes deviation – cylindrical tolerance zone’’. according to up-to-date approach to geometrical product specification, are the fundamental tool for proper specification of geometrical accuracy [14–16]. 5. Conclusions The analytical method for estimation the coordinate measurement uncertainty was presented. The method is in full accordance with type B method. In spite of the formulation in introduction to [7] that: ‘‘( ) in the case of a CMM, the formulation of a classical uncertainty budget is impractical for the majority of the measurement tasks due to the complexity of the measuring process.’’ the authors state that this method can be also applied in coordinate measurements. The paper presents the theoretical backgrounds of modelling the measuring process which makes possible the application of presented methodology. The elaborated software makes possible to take into consideration in uncertainty budget the same components of measurement error as in simulation software, it means the geometrical errors of CMMs, probing system errors and temperature errors. On the present stage the elaborated software does not take into consideration the errors coming from the form deviations of measured workpiece. The software covers ca. 80% of characteristics which are included in the technical documentation. However, it is developed in a way which enables quick and easy implementation of additional characteristics [17]. The presented software was tested and implemented at the Laboratory of Metrology of University of Bielsko-Biała as well as in over dozen different companies e.g. research laboratory of ANGA – Mechanical Seals Ltd., and Fiat-GM Powertrain Poland, Bielsko-Biala Currently the software is available in two languages: Polish and English. Acknowledgement The presented software was elaborated within the research grant, financially supported by Ministry of Science and Higher Education, in the years 2006–2009, Project 2308 W. Jakubiec et al. / Measurement 45 (2012) 2299–2308 Number R01 001 02, Project Title ‘‘Off-line system for estimation of coordinate measurements of workpieces in machine design in industrial conditions’’. References [1] E. Savio, Uncertainty in testing the metrological performances of coordinate measuring machines, Annals of CIRP 55 (2006) 535–538. [2] E. Trapet, E. Savio, L. De Chiffre, New advances in traceability of CMMs for almost the entire range of industrial dimensional metrology needs, Annals of CIRP 53 (1) (2004) 433–438. [3] H. Schwenke, B.R. Siebert, F. Waeldele, Assesment of uncertainties dimensional metrology by Monte Carlo simulation. Proposal of a modular and visual software, Annals of the CIRP 49 (2000). [4] H. Kuntzmann, E. Trapet, F. Waeldele, A uniform concept for calibration, acceptance test, and periodic inspection of coordinate measuring machines using reference objects, Annals of the CIRP 39 (1990). [5] A.B. Forbes, P.M. Harris, Simulated instruments and uncertainty estimation, NPL, 2000. [6] ISO/TS 15530-3:2004 Geometrical Product Specifications (GPS). Coordinate Measuring Machines (CMM): Technique for Determining the Uncertainty of Measurement. Part 3: Use of Calibrated Workpieces or Standards. [7] ISO/TS 15530-4:2008: Geometrical Product Specifications (GPS). Coordinate Measuring Machines (CMM): Technique for Determining the Uncertainty of Measurement. Part 4: Evaluating Task-specific Measurement Uncertainty using Simulation. [8] Guide to the Expression of Uncertainty in Measurement (GUM). International Organisation for Standardization (ISO), Geneva, 1995. [9] W. Jakubiec, Adequacy and generality conditions in estimation of uncertainty in measurements of geometrical quantities, Advances in Manufacturing Science and Technology 31 (4) (2007) 55–66. [10] W. Jakubiec, Analytical estimation of uncertainty of coordinate measurements of geometric deviations. Models based on distance between point and straight line, Advances in Manufacturing Science and Technology 33 (2) (2009) 45–54. [11] W. Jakubiec, Estimation of uncertainty of coordinate measurements according to the type B method, Key Engineering Materials 437 (2010) 253–257. [12] H. Schwenke, W. Knapp, H. Haitjema, A. Weckenmann, R. Schmitt, F. Delbressine, Geometric error measurement and compensation of machines – an update, CIRP Annals – Manufacturing Technology 57 (2008) 660–675. [13] ISO 1101:2004 Geometrical Product Specifications and Verification. Geometrical Tolerancing. Tolerancing of Form, Orientation, Location and Run-out. [14] Z. Humienny, State of art in standardization in GPS area, CIRP Journal of Manufacturing Science and Technology 2 (2009) 1–7. [15] Z. Humienny, Geometrical tolerances – how to measure according to latest ISO standards, Measurement, Automation and Monitoring (9bis) (2007) 497–498. [16] Z. Humienny, New approach to dimensional and geometrical tolerancing, Measurement, Automation and Monitoring (01) (2007) 27–30. [17] W. Jakubiec, W. Płowucha, M. Starczak, Off-line system for estimation of coordinate measurement uncertainty, Measurement, Automation and Monitoring (1) (2010) 6–7.