Overview of Aberrations
Lens Design OPTI 517
Prof. Jose Sasian
Aberration
From the Latin, aberrare, to wander from; Latin, ab, away, errare, to wander.
Symmetry properties
Prof. Jose Sasian
Overview of Aberrations
(Departures from ideal behavior)
•
•
•
•
•
•
Basic reasoning
Wave aberration function
Aberration coefficients
Aspheric contributions
Stop shifting
Structural aberration coefficients
Prof. Jose Sasian
Wavefront
Prof. Jose Sasian
Basic reasoning
• Ideally wavefronts and rays converge to
Gaussian image points. This implies that
ideally wavefronts must be spherical and
rays must be homocentric.
Prof. Jose Sasian
Basic reasoning
• Actual image degradation by an optical system implies that the
collinear transformation can not model accurately imaging. In the
wave picture for light propagation we notice that wavefronts must be
deformed from the ideal spherical shape.
• Wavefront deformation is determined by the use of a reference
sphere with center at the Gaussian image point and passing by the
exit pupil on-axis point.
Reference sphere
is centered at
ideal image
point
Reference
sphere
Deformed wavefront
Image plane
Prof. Jose Sasian
Exit pupil
Basic reasoning
• An axially symmetric system can only have an axially symmetric
wavefront deformation for an object point on-axis. In its simplest
form this deformation can be quadratic or quartic with respect to the
aperture. If the reference sphere is centered in the Gaussian image
point then the quadratic deformation can not be present for the
design wavelength.
Prof. Jose Sasian
Basic reasoning
• For an object point that is off-axis the axial symmetry of the beam is
lost and is reduced to plane symmetry. Therefore for that off-axis
beam the wavefront deformation can have axial, plane, or double
plane symmetry.
Prof. Jose Sasian
Basic reasoning
• The simplest plane symmetric wavefront deformation shapes
represent the primary aberrations. These are:
•
•
•
•
•
•
Spherical aberration
Coma
Astigmatism
Field curvature
Distortion
Longitudinal
chromatic
• Lateral
chromatic
Prof. Jose Sasian
Axially symmetric
Plane symmetric
Double plane symmetric
Axially symmetric
Plane symmetric
Axially symmetric
Plane symmetric
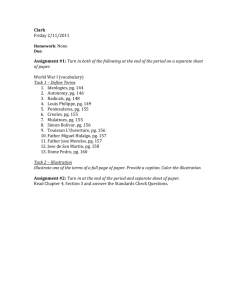
Aberration forms:
symmetry considerations
Distortion
Field curvature
Focus
Focus
Astigmatism
Spherical
aberration
Coma
On-axis
Prof. Jose Sasian
Spherical
aberration
Off-axis
Wave aberration function
• The wave aberration function is a function of the field H and
aperture ρ vectors. Because this function represents a scalar, which
is the wavefront deformation at the exit pupil, it depends on the dot
product of the field and aperture vectors. The assumed axial
symmetry leads to a select set of terms.
W {H , ρ } =
∑W
k ,l , m
H k ρ l cos m θ
j ,m,n
W ( H , ρ ,θ ) =
W000 + W200 H 2 + W020 ρ 2 + W111 H ρ cos θ +
+W040 ρ 4 + W131 H ρ 3 cos θ + W222 H 2 ρ 2 cos 2 θ +
+W220 H 2 ρ 2 + W311 H 3 ρ cos θ + W400 H 4 +
+...
Prof. Jose Sasian
H
ρ
Wave aberration function
• The field vector has its foot at the center of the object plane and the
aperture vector has its foot at the center of the exit pupil plane. Both
are normalized and so their maximum magnitude is unity. For
convenience we draw the first order image of the field vector.
H
Aperture and field vectors
Field vector
Aperture vector
Optical axis
Exit pupil
Prof. Jose Sasian
Image plane
ρ
Wave aberration function
• Note that defocus W020 and the change of scale W111
terms are not needed because Gaussian optics
accurately predict the location and size of the image.
The piston terms W000, W200 and W400 represent a
constant phase change that does not degrade the
image. These piston terms do not depend on the
aperture vector and so they do not produce transverse
ray errors.
• Piston terms represent and advance or delay on the
propagation of a wavefront.
Prof. Jose Sasian
Summary of primary aberrations
Prof. Jose Sasian
Aberration coefficients for a system of q
surfaces
q
u
1
− ∑ A2 y ∆
SI =
W040 = S I
n
j =1
8
q
u
S
y
=
−
∆
1
∑
II
n
W131 = S II
j =1
q
2
u
2
S
=
−
A
y
∆
∑
III
1
n
j =1
W222 = S III
q
2
S IV = −∑ Ж 2 P
j =1
1
q
A 2
u
=
W220
2
( S IV + S III ) SV =
−∑ Ж P + A y∆
4
n
j =1 A
q
1
2 1
W311 = SV
−∑ A A ∆ 2 y − ( Ж + Ay ) yP
SV =
n
j =1
2
Prof. Jose Sasian
Aberration coefficients for chromatic
aberrations
δλW020
1
= CL
2
δn
=
CL ∑ Ay∆
n
j =1
q
Prof. Jose Sasian
δλW111 = CT
δn
CT ∑ Ay∆
=
n
j =1
q
Aberration coefficient parameters
A = nu + nyc = ni
A = nu + nyc = ni
1
=
Ж nuy − nuy c =
P = c∆(1 / n )
r
δn n − 1
∆ =
n nν
Prof. Jose Sasian
nd − 1
ν=
n F − nC
Aberration coefficients
Ж
is the Lagrange invariant.
• c is the surface curvature, ν is the ν number or
reciprocal dispersive power.
• All with the marginal and chief ray first-order
ray traces !!!
• Lens optimization started!!!
Prof. Jose Sasian
Comments on aberrations
•
•
•
•
•
•
•
Third-order or fourth-order ?
A well corrected system has its third-order aberrations
almost zero
Aberration cancellation is the main mechanism for
image correction
Presenting to the optimization routine a system with its
third-order aberrations corrected is a good starting
point
Some simple systems are designed by formulas that
relate third-order aberrations
Note symmetry in third-order aberration coefficients
Wave aberrations seem to be simpler to understand
than transverse ray aberrations
Prof. Jose Sasian
Example
Prof. Jose Sasian
Example
Prof. Jose Sasian
Summary of aberrations
Prof. Jose Sasian
Aspheric surfaces
(non-spherical)
•
•
•
•
•
•
•
•
Conic (or conicoids)
Cartesian ovals
Polynomials on x/y, r-theta, Zernikes
Bernstein polynomials, Bezier curves
Splines
NURBS
Freeform surfaces
User defined
Prof. Jose Sasian
Conic plus polynomial
(much used in lens design)
Z (S ) =
[
cS 2
1 + 1 − ( K + 1)c 2 S 2
]
+ A4 S 4 + A6 S 6 + A8 S 8 + A10 S 10 + ...
S2 = x 2 + y2
C is 1/r where r is the radius of curvature; K is the
conic constant; A’s are aspheric coefficients
Aspheric contribution can be thought
of as a cap to the spherical part
Sag= sphere + aspheric cap
Prof. Jose Sasian
Aspheric contributions to the
Seidel sums
δ SI = a
δC L = 0
y
δ S II = a
y
δCT = 0
1
W040 = S I
8
W131 =
1
S II
2
2
δ S III
y
= a
y
a = 8 A4 y 4 ∆n
δ S IV = 0
3
y
δ SV = a
y
Prof. Jose Sasian
a = −ε 2 c 3 y 4 ∆n
W222 =
=
W220
1
S III
2
1
( S III + S IV )
4
W311 =
1
SV
2
Aspheric contributions explanation
Prof. Jose Sasian
Aspheric contributions depend on chief ray
height at the surface
•When the stop is at the aspheric surface only spherical aberration is contributed
given that all the beams see the same portion of the surface
.
•When the stop is away from the surface, different field beams pass through
different parts of the aspheric surface and other aberrations are contributed
Prof. Jose Sasian
Stop Shifting
Optical axis
Exit pupil
Image plane
•Stop shifting is a change in the location of the aperture stop along the optical axis
•Stop shifting does not change the f/#
•Stop shifting does not change the optical throughput
•Stop shifting selects a different portion of the wavefront for off-axis beams
Prof. Jose Sasian
Stop shifting may produce light vignetting
Prof. Jose Sasian
Stop shifting
Prof. Jose Sasian
Change of Seidel sums with stop
shifting
1
W040 = S I
8
δS I = 0
δy
δS II = S I
y
W131 =
2
δS III
δS IV
δy
∂y
= 2 S II + S I
y
y
=0
W222
2
Prof. Jose Sasian
1
= S III
2
3
δy
δy
δy
δSV = {S IV + 3S III }+ 3 S II + S I
y
y
y
δC L = 0
∂y
δCT = C L
y
1
S II
2
=
W220
1
( S III + S IV )
4
W311 =
1
SV
2
Wave coefficients in terms of Seidel
sums
Prof. Jose Sasian
1
W040 = S I
8
1
W131 = S II
2
1
W222 = S III
2
1
=
W220
( S III + S IV )
4
1
W311 = SV
2
The ratio
δy
y
Can be calculated at any plane in the optical system
unew − uold ynew − yold Anew − Aold
=
S = =
u
y
A
S
Prof. Jose Sasian
is the stop shifting parameter
Structural coefficients σ
SI =
1 4 3
yp φ σ I
4
1
S II = Жy p 2φ 2σ II
2
C L = y p φσ L
2
CT = 2 Жσ T
S III = Ж 2φσ III
S IV = Ж φσ IV
2
2 Ж3
σV
SV =
2
yp
Prof. Jose Sasian
yp
Marginal ray height at
the principal planes
Structural coefficients:
Thin lens (stop at lens)
[
1
S I = y 4φ 3 AX 2 − BXY + CY 2 + D
4
1
=
S II
Жy 2φ 2 [ EX − FY ]
2
S III = Ж 2φ
]
1
c1 + c 2 r2 + r1
=
c1 − c 2 r2 − r1
1 + m u '+u
Y=
=
1 − m u '−u
ν
φ = ∆n∆c = (n − 1)(c1 − c x )
S IV = Ж 2φ
1
n
SV = 0
CL = y 2φ
A=
CT = 0
Prof. Jose Sasian
φ
n(n − 1)
B=
4(n + 1)
n(n − 1)
C=
3n + 2
n
X =
Surface optical power
n+2
D=
2
n2
(n − 1)2
E=
n +1
n(n − 1)
F=
2n + 1
n
Bending of a lens
• Maintains the
optical power
• Changes the
optical shape
• Meniscus, planoconvex, doubleconvex, etc.
• Shape factor
Prof. Jose Sasian
c1 + c 2 r2 + r1
X =
=
c1 − c 2 r2 − r1
Using a lens design program
•
•
•
•
•
•
•
•
•
Must be able to interpret correctly the information
displayed by the program
In some instances the program is right but we think it is
wrong. So we must carefully review our assumptions
When there is disagreement between you an the
program, there is an opportunity to learn
Verify that the program is modeling what you want
Check and double check
You must feel comfortable when using a program.
Read the manual
Play with the program to verify that it does what you
think it does
Must reach the point when it is actually fun to use the
program
Prof. Jose Sasian
Summary
•
•
•
•
•
Review of aberrations
Aspheric surfaces
Stop shifting
Aberration coefficients
Structural aberration coefficients
• Next class derivation of coefficients
Prof. Jose Sasian
Mode matching concept
•
•
•
•
•
•
Same mode diameter
Same amplitude distribution
Same phase distribution
Same polarization
Same x,y,z position
Same angular position
Prof. Jose Sasian
Fiber coupling efficiency
z
“overlap integral”
+∞
∫
Ψ m ( x )Ψ ∗m ( x ) dx =
1
−∞
ε=
+∞
∫
Ψ m ( x )Ψ ∗m ( x ) dx
−∞
4
2
2
ω0 ω0 λ
2
+
+
+
z
z
)
(
ω
ω
πω
ω
0
0
0 0
Prof. Jose Sasian
Herwig Kogelnik