Math 6510 Homework 1
Tarun Chitra
February 3, 2011
1
Let X be a topological space and suppose that x0 , x1 are in the same path component. Since they are in the same
component, there exists a (continuous) path h : I → X such that h(0) = x1 , h(1) = x0 . Let P be the set of homotopy
classes of paths from x0 to x1 and define F : P → π1 (X, x0 ) by F ([f ]) = [f · h]. This is a loop based at x0 and as such
[f · h] ∈ π1 (X, x0 ). We need to show that this map is well-defined and bijective.
Well-Defined :
Suppose f ' g or in other words [f ] = [g] ∈ P. If ht is the homotopy between f, g and 1t is the identity homotopy (i.e.
1t (x) = x, ∀t) then ht · 1t gives a homotopy between f · h and g · h.
Injectivity:
Suppose that [f · h] = [g · h] in π1 (X, x0 ). Then [f · h] · [h̄] = [f ] and [g · h] · [h̄] so that [f ] = [g].
Surjectivity:
Let [f ] ∈ π1 (X, x0 ). Note that [f · h̄] is a path between x0 and x1 so that it makes sense to consider F ([f · h̄]). It is
clear that F ([f · h̄]) = [f ].
2
Let X be path connected and suppose that h is the path between x0 and x1 . Let βh : π1 (X, x0 ) → π1 (X, x1 ) be
the change of basepoint homomorphism, βh ([f ]) = [h · f · h̄]. Suppose that g ' h. Then we want to show that
βh ([f ]) = βg ([f ]), ∀f ∈ π1 (X, x0 ). Let Ht be the homotopy between g, h. Then Ht · 1t · H̄t is a homotopy between
[h · f · h̄] and [g · f · ḡ]. Hence βh = βg , ∀h ' g.
3
Let X be a path connected space.
(⇒) Suppose that π1 (X, x0 ) is Abelian for all x0 ∈ X. From problem 1 we know that P(x0 , x1 ) = {[h] : h : I → X, h(0) =
x0 , h(1) = x1 } is in bijective correspondance with π1 (X, x0 ) for any x1 ∈ X. Since we already know that the change of
basepoint homomorphism is a well-defined map, we can without the loss of generality choose a representative from each
class in π1 (X, x0 ) that corresponds to a class in P(x0 , x1 ). Now suppose that [g], [h] ∈ P, so that [h · ḡ] ∈ π1 (X, x0 ).
To reiterate, the result of problem 1 states that every element of π1 (X, x0 ) is represented by such a loop, so this is
equivalent to picking an arbitary loop in π1 (X, x0 ). We want to show that for arbitrary1 [f ], [k] ∈ P(x0 , x1 ) that
βf¯([h · ḡ]) = βk̄ ([h · ḡ]). The proof is more easily explained upon considering the following drawing:
x1
f
ḡ
h
k
x0
1 The
result of problem two justifies looking at the homotopy classes in P as opposed to themselves
1
Math 6510
Professor Hatcher
Homework 1
Net ID: tc328
Tarun Chitra
February 3, 2011
Now note the following:
βf¯([h · ḡ]) = [f¯ · h · ḡ · f ] = [(f¯ · h) · (ḡ · f )] = [(ḡ · f ) · (f¯ · h)] = [ḡ · h]
(1)
= [ḡ · k · k̄ · h] = [(ḡ · k) · (k̄ · h)] = [k̄ · h · ḡ · k]
(2)
= βk̄ ([h · ḡ])
(3)
The 3rd equalities of (1), (2) follow from the fact that π1 (X) is Abelian. This shows that the change of basepoint
homomorphism is independent of path chosen.
(⇐) Suppose that the basepoint-change homomorphisms βh only depend on the endpoints of the path h. This means
that if h, g are paths between x0 , x1 ∈ X, then βh ([f ]) = βg ([f ]), ∀f ∈ π1 (X, x0 ). Now suppose that x1 = x0 , for then
h, g are simply loops in π1 (X, x0 ). Now let f, g ∈ π1 (X, x0 ) and note the following:
[g] = [g · g · ḡ] = βg ([g]) = βf ([g]) = [f · g · f¯]
If we multiply on the left by [f ] we have [g] · [f ] = [g · f ] = [f · g · f¯] · [f ] = [f · g · f¯· f ] = [f · g] which shows that π1 (X, x0 )
is Abelian. Since X is path connected, this means that π1 (X, x0 ) ∼
= π1 (X, x1 ), ∀x1 ∈ X.
Alternatively, note that we can show this rather quickly by using problem 1. Since the basepoint-change homomorphism only depends on endpoints, note that if h is a path from x0 to x1 and g is a path from x1 to x0 , then
[h · g] ∈ π1 (X, x0 ). Since the change of basepoint homorphism is endpoint indpendent, βh = βḡ . This gives an explicit
homotopy between h · g and g · h, so that from the bijection found in problem 1, π1 (X) is necessarily Abelian.
5
We will prove the following implications in order to arrive at (a) ⇐⇒ (b) ⇐⇒ (c). (a) =⇒ (b):
Suppose that every map S 1 → X is homotopic to a constant map, with image a point. Suppose f : S 1 → X and let the
homotopy be H : S 1 xI → X so that H|S 1 ×{0} = f, H|S 1 ×{1} = x0 for some x0 ∈ X. Now parametrize D2 by a radial
coordinate r ∈ [0, 1] and an angular coordinate φ ∈ [0, 2π) (which will serve as a well-defined angle form on S 1 ) and
define a map F : D2 → X, F (r, φ) = H(φ, 1 − r). This map is continuous since H is continuous and defined on all of
D2 . Finally, note that F (1, φ) = f (φ), so that F restricts to f on ∂D2 .
(b) =⇒ (a):
Suppose that every map S 1 → X extends to a map D2 → X. Let f : S 1 → X be a continuous map and f˜ : D2 → X
it’s extension. Since D2 is a contractible, there exists map ϕ : D2 → {x0 } and ψ : {x0 } → D2 such that ϕψ ' 1lx0 and
ψϕ ' 1lD2 . As such, composing f˜ with ψ gives a homotopy H between f˜ and a constant map g : D2 → X, g(D2 ) = f˜(x0 ).
For instance, if D2 ⊂ R2 and we choose x0 = 0, then this homotopy is simply H(x, t) = f˜(tx). Since f˜|∂D2 = f , this
gives a homotopy between f and a constant map. In the case of D2 ⊂ R2 , this homotopy is explicitly given by simply
restricting H : D2 × I → X to ∂D2 × I or in other words H(x, t) = f˜(tx), |x| = 1.
(b) =⇒ (c):
Note that every map S 1 → X is a loop and that if a map f : S 1 → X extends to a map f˜ : D2 → X, then there is
a homotopy between f, f˜. Using the argument of the previous implication, (b) =⇒ (a), there is a homotopy between
f˜ and a constant map. Since the binary relation "is homotopic to" is transitive, this implies that f is homotopic to a
constant map. Since all of the above homotopies will preserve basepoint, this is a loop homotopy. Hence [f ] is trivial
and π1 (X, x0 ) = 0, ∀x0 since the base of the loop and the choice of loop were arbitrary.
(c) =⇒ (a):
Suppose that π1 (X, x0 ) = 0, ∀x0 ∈ X. The definition of a loop in a space X based at x0 is a continuous map ϕ : I → X
such that ϕ(0) = ϕ(1) = x0 . This is equivalent to a map ϕ̃ : S 1 → X since we can compose ϕ with the quotient
map p : I → S 1 that maps p(0) = p(1). Hence the loop space of X, denoted [S 1 , X] is the set of homotopy classes
of all maps S 1 → X. Since π1 (X, x0 ) is trivial for all x0 ∈ X this implies that [S 1 , X] is necessarily trivial. One
could form this category theoretically by consider the category H of homotopic loops in X. Within this category, we
see that the above argument implies that [S 1 , X] ∼
= {[h] ∈ π1 (X, x0 ), for some x0 ∈ X} under the "loop morphism"
[f ] ∈ [S 1 , X] 7→ [f, f (θ0 )]. Note that this isomorphism, given the hypotheses of this problem is only valid because of the
triviality conditions in (a), (c). In the next problem, we will see that the same result is true, without such a triviality
condition, if X is path-connected by using the inverse of the above loop morphism, a forgetful-like functor.
6
Let (X, x0 ) be a path-connected, pointed space, define [S 1 , X] = [f ] : f : S 1 → X, f cts and define the map φ :
π1 (X, x0 ) → [S 1 , X] by [f, x0 ] 7→ [f ] (i.e. forget the basepoint x0 ). The idea is that [S 1 , X] is the set of equivalence
classes of maps S 1 → X under a homotopy of maps whereas π1 (X, x0 ) is the set of equivalence classes of maps S 1 → X
under homotopies of loops (i.e. homotopic relative to a distinguished point). As the map φ is the forgetful functor
2
Math 6510
Professor Hatcher
Homework 1
Net ID: tc328
Tarun Chitra
February 3, 2011
◦
(inclusion) from the category of pointed topological spaces, Top to the category of topological spaces Top, the result of
this problem depicts that for path-connected spaces, the spaces of map homotopies and loop homotopies are in one-to-one
correspondance. Now we have to show two things:
• φ is surjective
• φ is injective on conjugacy classes, i.e. φ([f ]) = φ([g]) ⇐⇒ ∃h ∈ π1 (X, x0 ) 3 [hf h̄] = [g]
Surjectivity:
Let [f ] ∈ [S 1 , X] and let θ be the standard angle form on S 1 and let θ0 ∈ [0, 2π) be an arbitrary angle. Since X
is path-connected, there is a path h between f (θ0 ) and the basepoint x0 . Then the map hf h̄ is a loop based at x0
that corresponds to [f ] under φ. We still need to establish that the map is well-defined, since the class [f ] ∈ [S 1 , X]
is only defined up to a homotopy of maps. Suppose that f, g ∈ [f ], homotopic via a map L : S 1 × I → X such that
L|S 1 ×{0} = f, L|S 1 ×{1} = g. Let h, h̃ be paths between x0 and f (θ0 ), g(θ0 ). Then we need to show that hf h̄ ' h0 g h̄
is a homotopy of loops. Since X is path-connected, ∃ a path ht between x0 and H(θ0 , t), ∀t ∈ I, so define the map
H : X × I → X by H|X×{t} = ht . This is a continuous map (since the path ht is a continuous map for all t) and as
such defines a homotopy between h, h0 . Then the map Ht · Lt · H̄t , where · is the group operation within π1 defines a
homotopy between hf h̄ and h0 g h̄.
∴ φ is surjective
Injectivity on Conjugacy Classes:
(⇒) Suppose that φ([f ]) = φ([g]). This means that as maps, f ' g via a homotopy H. Since f, g are loops based at
x0 , we need to ensure that H is a homotopy of loops. This means that if f (θ0 ) = g(θ̂) = x0 then we need to construct a
loop such that Ht (θ̂) = x0 , ∀t, where Ht = H|X×{t} . Since X is path-connected, let h be a path between x0 and f (θ̂).
Then h · f · h̄ is a loop based at x0 that is loop homotopic to g.
(⇐) Now suppose that there exists an [h] ∈ π1 (X, x0 ) such that hf h̄ ' g. We want to show that φ([f ]) = φ([g]) or
in other words, f ' g as a homotopy of maps. Now note that as a loop, h : [0, 1] → X, h(0) = h(1) = x0 is homotopic
(as a map) to the constant map at x0 via the homotopy H : I × I → X, H(x, t) = h(tx). Hence hf h̄ is homotopic as a
map to f by using the aforementioned homotopy H and H̄.
7
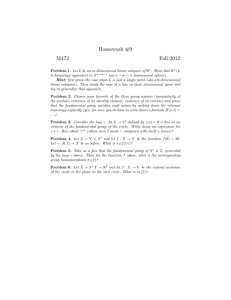
A picture of the map f : S 1 × I → S 1 × I, f (θ, s) = (θ + 2πs, s) for a fixed θ is the following:
We can construct an explicit homotopy to one of the boundary circles, namely the map F : (S 1 × I) × I → S 1 × I
defined by F (θ, s, t) = (θ + 2πts, s). This is certainly continuous and F (θ, s, 0) = 1lS 1 ×I , F (θ, s, 1) = f (θ, s). Note
3
Math 6510
Professor Hatcher
Homework 1
Net ID: tc328
Tarun Chitra
February 3, 2011
that this homotopy only restricts to the identity, ∀t ∈ I on S 1 × {0}. Now we need to show that there doesn’t exist
a homotopy H : (S 1 × I) × I → S 1 × I that restricts to the identity on S 1 × {1} ∪ S 1 × {0} for all t ∈ I. Suppose
that such a homotopy existed. Now fix θ0 ∈ [0, 2π) and consider the set Kt := {Ht (θ0 , s) : s ∈ [0, 1]}. Now note that
K0 = {f (θ0 , s) : s ∈ [0, 1]} = {(θ0 + 2πs, s) : s ∈ [0, 1]} which is simply the image of f . Let p1 : S 1 × I → S 1 be the
projection onto the first coordinate. Then the set {(p1 (k), 0) : k ∈ K0 } is homeomorphic to [ω1 ] ∈ π1 (S 1 × {0}, x0 ), the
loop that wraps around S 1 once. This can be seen in the above image, if you simply project the helix down onto the
base S 1 . Now note that the set K1 = {(θ0 , s) : s ∈ [0, 1]} is simply a line on the cylinder. Projecting this down onto
the base S 1 yields a constant loop, [ω0 ] ∈ π1 (S 1 × {0}, x0 ). This implies that H is a homotopy between [ω0 ] and [ω1 ] a
contradiction.
8
No, the Borsuk-Ulam Theorem does not hold for T2 = S 1 × S 1 . We can think of S 1 × S 1 ⊂ C2 , defined by S 1 × S 1 =
{(z1 , z2 ) ∈ C2 : |z1 | = |z2 | = 1} = {(e2πiθ1 , e2πiθ2 ) ∈ C2 : θ1 , θ2 ∈ [0, 1)}. Now let n ∈ N be odd and consider the map
(e2πiθ1 , e2πiθ2 ) 7→ (θ1n , θ2n ). The inversions z1 7→ −z1 , z2 7→ −z2 send θ1 7→ θ1 + 21 , θ2 7→ θ2 + 12 . If this map were to
satisfy f (x, y) = f (−x, −y), then we would have θ1n = (θ1 + 12 )n , θ2n = (θ2 + 12 )n . This means that we have to show that
the polynomials,
n−1
X
n−i
n i 1
(θ1 + π) −
=
θ
i 1 2
i=0
n−1
X n 1 n−i
θ2i
(θ2 + π)n − θ2n =
i
2
i=0
n
θ1n
(4)
(5)
don’t have any roots in [0, 1). For n = 3 this is true, since we get a quadratic with only imaginary roots. However, note
that it is not possible for a root of either polynomial to be in [0, 1), since we would have a finite sum of strictly positive
numbers. Hence we have an infinite sequence of polynomials that violate the Borsuk-Ulam Theorem
9
We want to prove the Ham-Sandwich Theorem for R3 : If A1 , A2 , A3 are compact sets in R3 , then ∃ a plane that
simultaneously divides the three sets into subsets of equal measure. Without the loss of generality, assume that there
exists a neighborhood U of 0 ∈ R3 such that Ai ∩ U = ∅. By transforming coordinates with an affine translation, we
can always ensure that this happens. First, let’s reduce the problem to considering points on the unit sphere, S 2 ,→ R3 .
For each point in ai ∈ Ai (for any i), there exists a unique line xi connecting ai and 0 ∈ R3 . A standard fact about 3dimensional geometry is that it takes 3 points (or vectors) to determine a plane up to origin (i.e. to specify an affine plane
that is homeomorphic to the 2-dimensional Affine Space A2 ). Since we have three sets, a point (a1 , a2 , a3 ) ∈ (A1 , A2 , A3 )
specifies (up to location of origin) a unique plane passing through the points a1 , a2 , a3 . Since each point corresponds to a
line, we can map ai to xi ∩ S 2 . More precisely, we construct a map Λ : R3 \{0} → S 2 , Λ(x) = [x], where the equivalence
relation is x ≡ y ⇐⇒ x = λy, λ > 0. This is similar to the construction of RP2 except that we are looking at equivalence
classes of rays. Note that this map is continuous (it is the retraction of R3 \{0} onto S 2 ) and one of the maps of a
homotopy equivalence, so that in particular, Λ(Ai ) ⊂ S 2 is compact. Thus we can specify a plane that intersects all three
sets by specifying points (ã1 , ã2 , ã3 ) ∈ Λ(A1 ) × Λ(A2 ) × Λ(A3 ), up to translation. Since we are measure "equal division"
of the sets A1 , A2 , A3 by using the Lebesgue measure m on R3 (which is the unique, translational-invariant, complete
Radon measure on R3 ), knowing a plane "up to translation" will not change our results. Another elementary fact from
geometry2 is that a plane in R3 divides R3 into two disjoint subsets R+ and R− . Given a point (ã1 , ã2 , ã3 ), denote the
partition due to the plane containing (a1 , a2 , a3 ) by {R+ (ã1 , ã2 , ã3 ), R− (ã1 , ã2 , ã3 )}. Now suppose for a contradiction
that there does not exist a plane that divides Ai , ∀i. Then this means that there is no point (ã1 , ã2 , ã3 ) ∈ S 2 such
that m (Ai ∩ R+ (ã1 , ã2 , ã3 )) = m (Ai ∩ R− (ã1 , ã2 , ã3 )). For brevity, let m±
i (a˜1 , a˜2 , a˜3 ) := m (Ai ∩ R+ (ã1 , ã2 , ã3 )) −
m (Ai ∩ R− (ã1 , ã2 , ã3 )) , m∓ = −m± . Now consider the function, f : S 2 × S 2 × S 2 → R2 × R2 × R2 defined by:
∓
±
∓
±
∓
f (ã1 , ã2 , ã3 ) = m±
(6)
1 (a˜1 , a˜2 , a˜3 ), m1 (a˜1 , a˜2 , a˜3 ) , m2 (a˜1 , a˜2 , a˜3 ), m2 (a˜1 , a˜2 , a˜3 ) , m3 (a˜1 , a˜2 , a˜3 ), m3 (a˜1 , a˜2 , a˜3 )
This map is continuous, since we are composing a restriction morphism with the Lebesgue measure yielding a measure
that is absolutely continuous (and has compact support) with respect to m. The projection pi f of f onto its ith
coordinate can be considered a continuous map S 2 → R2 so that by the Borsuk-Ulam theorem, there exists x ∈ S 2
±
∓
∓
such that f (x) = f (−x). This implies that m±
i (x) = mi (−x), mi = mi (−x). The equations are redundant and we
2 Unlike
the Jordan Curve Theorem!
4
Math 6510
Professor Hatcher
Homework 1
Net ID: tc328
Tarun Chitra
February 3, 2011
only need to consider, without the loss of generality, the ± case. Since each point x ∈ S 2 maps to the intersection of
−
+
−
2
two open sets this gives m+
i (x) − mi (x) = mi (−x) − mi (−x). As x 6= −x∀x ∈ S , the σ-additivity of the Lebesgue
+
+
+
−
−
−
measure gives m (x ∪ (−x)) = m (x) − m (−x) = m (x) − m (−x) = m (x ∪ (−x)). This implies that ∃ a point
where m+ = m− , contradicting our assumption that no such point exists. Tracing back through the reductions and
reformulation of this problem as a map on the sphere, this means that there must exist a plane that divides each Ai .
5