DFIG Wind Turbine Control: Direct vs. Indirect Field Orientation
advertisement

2017 14th International Multi-Conference on Systems, Signals & Devices (SSD)
Direct and Indirect Field Oriented Control
Of DFIG-Generators for Wind Turbines
Variable-Speed
Yasmine IHEDRANE, Chakib El BEKKALI
Badre BOSSOUFI
LISTA Laboratory, Faculty of Sciences Dhar El Mahraz.
University Sidi Mohammed Ben Abdellah.
Fez, Morocco
{yasmine.ihedrane;chakib.elbekkali }@usmba.ac.ma
Laboratory of Electrical Engineering and
Maintenance, University of First Mohammed,
Higher School of Technology
Oujda, Morocco
badre.bossoufi@usmba.ac.ma
Abstract— In this paper, we present a study and modeling of
a
wind
system
based
on
Doubly-Fed
Induction
Generator (DFIG) , whose stator is directly connected to the grid
in contrast to the rotor which is linked via power converters. The
objective of this modeling is to improve the performance of the
wind system by applying direct and indirect field oriented control
to control the active and reactive power exchanged between the
stator of the DFIG and the grid . The simulation results are
tested and compared in order to evaluate the performance of the
proposed system.
field along one of the axes of the referential d, q in order to
make this machine’s behavior similar to that of a Separately
Excited DC Machine, this control is based on PID
controllers In this article, we begin with the modeling of the
turbine [3][4], and next we present a model of the DFIG in
the referential (d, q). After that, we present the principle of
direct and indirect stator field oriented control. Finally with
the use of MATLAB / SIMULINK, we will present and
analyze the simulation results to validate our theoretical
study. The general structure of the wind system and control
FOC is given in ( fig. 1) [12]:
Keywords
—Wind;
Doubly-Fed
Induction
Generator (DFIG); Direct field Oriented Control (DFOC);
Indirect Field Oriented Control (IFOC) .
I.
INTRODUCTION
Recently,
energy consumption
has
increased
enormously, due to massive industrialization, that’s why the
exploitation and development of renewable energies have
grown strongly. Today, wind power has become a reliable
Source for energy production due to its motivating nature,
the evolution of semiconductor technology and the new
methods of controlling the variable speed turbines [1].
Wind turbines based on DFIG whose stator is directly
connected to the grid contrary to the rotor which is
connected via power converters (fig.1) are nowadays the
most widely used because it allows producing electricity at
variable speed and thus to better exploiting the wind
resources for different wind conditions [2]. But, the major
difficulty in controlling this type of machine lies in the fact
that the powers are strongly coupled.
Fig. 1. Architecture of the control.
II.
MODELING OF THE CONVERSION CHAIN
A. Modèle de la turbine :
The wind power is given by:
=
. .
(1)
The turbine is a device to convert a percentage of the wind
For this reason, several methods of controlling of DFIG
have emerged, among them ,the field oriented control
technique .The principle of this technique was developed by
BLASCHKE in the early 1970s; it consists in orienting the
power, defined by Cp, so aerodynamic power of the turbine
will be given by:
=
(λ, ).
. .
.
(2)
978-1-5386-3175-1/17/$31.00 ©2017 IEEE
27
Authorized licensed use limited to: University of Cape Town. Downloaded on November 04,2022 at 09:37:50 UTC from IEEE Xplore. Restrictions apply.
The speed ratio λ [13], which is defined as the ratio between
the linear speed of the turbine Ωt and the wind speed v:
Φ
⎧Φ
(3)
⎨Φ
⎩Φ
λ = R.
The aerodynamic torque is defined from the speed of the
turbine as follow:
. .
(λ, ).
=
.
With :
− C . β − 4 ∗ exp −
=(
.
. )
+ C .λ
.
−
+ M .I
+ M .I
+ M .I
+ M .I
(10)
Ω
−
= j.
+ f. Ω
(11)
The expression of electromagnetic torque based on stator
field and currents is given, by:
C
= p. (Φ . I
Where:
The power coefficient Cp is approximated using a nonlinear
equation described as follows [5]:
C ((λ, β) = C
.
.
.
.
The mechanical equation is given by [6]:
(4)
.
=
=
=
=
− Φ . I ) (5)
Φs (d, q), Φr (d, q): stator and rotor field in the reference of
PARK.
(6)
Is (d, q), Ir (d, q) stator and rotor currents in the reference of
PARK.
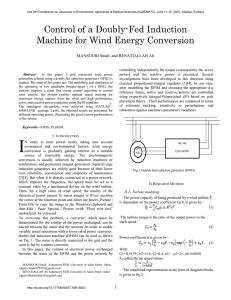
The following figure shows the relation between the
coefficient Cp and λ for different values of the angle β.
Rs, Rr: stator and rotor resistances.
Ls, Lr: cyclical Inductors own stator and rotor.
Cp (lambda,beta)
0.6
M: mutual inductance cycle.
0.4
p: Number of pole pairs of the machine.
0.2
0
ωs: Pulse of the stator electrical quantities.
Cp
-0.2
-0.4
ωr: Pulse of the rotor electrical quantities.
-0.6
beta=0°
beta=2°
beta=4°
beta=6°
beta=8°
beta=10°
-0.8
-1
-1.2
-1.4
0
2
4
6
8
10
Lambda
12
14
16
18
The following figure shows the block diagram of the
doubly-fed induction generator DFIG integrated in a wind
system:
20
Fig. 2. aerodynamic power coefficient Cp as a function of λ and β
The fundamental equation of dynamics permits the
determination of the evolution of the mechanical speed from
the mechanical torque (Cmec) applied to the rotor:
C
=J
=C −C
−C
(7)
(8)
Where:C = f . Ω
B. Modeling of DFIG :
Fig. 3. the block diagram of the doubly-fed induction generator DFIG
integrated in a wind system
Before doing the modeling of a doubly-fed induction
generator DFIG (fig. 3), it is necessary to represent a two
phase model (d, q) given by Park transformation [5][6][14].
III.
A. Principale of control
The principle of control by stator field direction is to
orient the stator field along the axis’d’ [7][8], that is to say:
Stator and rotor voltages Vs(d,q),Vr(d,q) are expressed by:
⎧
⎪
⎪
⎨
⎪
⎪
⎩
=
.
+
− ω .ϕ
=
.
+
− ω .ϕ
=
.
+
− ω .ϕ
=
.
+
+ ω .ϕ
FIELD ORIENTED CONTROL FOC
Φ
= Φ And Φ
=0
We know that for medium and large power equipment
used in wind turbines, the stator resistance is negligible. We
assumed that the grid is stable, so, the field is constant .The
previous equations becomes as follows
(9)
The stator and rotor field equations are given by [6]:
x
Expressions of the field :
28
Authorized licensed use limited to: University of Cape Town. Downloaded on November 04,2022 at 09:37:50 UTC from IEEE Xplore. Restrictions apply.
Φ
= 0 = L .I + .I
= L .I + .I
Φ
In this diagram we can notice that the powers and the
voltages are linked by transfer functions with first order.
(13)
Because the value of the slip ‘’ g ‘’ is low and the
influences of the coupling is weak, the d and q axes can be
controlled separately .This will allow us to easily establish
the vector control [7].
From the equation (13), we obtain the relation between
the stator and rotor currents, giving by the following
equation:
I
I
=
M
=−
1
Ls
x
C
Ls
There are two ways to perform the control power of this
machine:
I
(14)
(Φ − M. I )
The expression of electromagnetic torque :
= . I . Φ = −p. . Φ . I
x The first is to ignore the terms of coupling and to
establish an independent regulator in each axis to
independently control the active and reactive power.
This method is called Direct Method [7][9][10][11]
because the power regulators directly control the
rotor voltage of the machine as shown in the
following (fig. 5).
(15)
Based on the assumptions:
=
=0
= ω .Φ
(16)
x The second method is to consider the coupling terms
and compensate them performing a system with two
loops to control the powers and rotor currents.This
method which is called Indirect Method [7] is
generated directly from equations (20) and (18) (fig
6)
The stator active and reactive powers are written
according to following expressions:
P = V .I
Q = V .I
+ V .I
− V .I
(17)
By replacing the equation (17) by (14), (16) we get
following expression of power:
P = V .I
Q =VI
= −V .
V2
=
.
M
.I
L
−V .
M
L
(18)
.I
The expression of the rotor field becomes:
Φ
=
Φ
−
=
.
−
+
.
Fig. 5. Direct Field Oriented Control
.
(19)
.
From these equations we can deduce the relation between
the rotor voltages (d, q) and the rotor currents (d, q):
=(
=(
+ .
+ .
−
−
).
).
+
−
. .
. .
−
−
.
.
+
. .
(20)
These equations allow to establish a block diagram of
the electrical system that can be regulated given by the
figure below:
Fig. 6. . Indirect Field Oriented Control
IV.
SIMULATION RESULTS
In order to evaluate the efficiency of the direct and
indirect
Field
Oriented
Control (DFOC&IFOC).
MATLAB/SIMULINK is used to carry out the
simulation.We proposed a random wind profile as shown in
(fig.7).We have subjected the system to a reference power
Psref of the step form and a reference power Qsref to zero.
Fig. 4. . Block diagram of the DFIG
29
Authorized licensed use limited to: University of Cape Town. Downloaded on November 04,2022 at 09:37:50 UTC from IEEE Xplore. Restrictions apply.
Rotor Current Idr(A)
Wind speed profiles
11
1600
10
1400
1200
1000
8
Idr(A)
Wind speed (m/s)
9
7
6
800
600
400
5
200
0
4
0
1
2
3
4
5
Time(s)
6
7
8
9
10
-200
0
1
2
Fig. 7. Wind speed profiles
x
3
4
5
Time(s)
6
7
8
9
10
7
8
9
10
1.26
1.27
1.28
Fig. 11. Rotor current Idr
Simulation result of DFOC
stator current is abc
4000
5
0
stator active power DFOC
x 10
3000
Psmesured
Psref
2000
stator current (A)
Stator active power(W)
-2
-4
-6
1000
0
-1000
-8
-2000
-10
-3000
-12
0
1
2
3
4
5
Time(s)
6
7
8
9
10
-4000
0
1
2
3
4
5
Time(s)
6
Fig. 8. Stator active power
stator current Irq (A) DFOC
stator current is abc
4000
3500
3000
3000
2000
stator current (A)
Irq(A)
2500
2000
1500
1000
0
-1000
1000
-2000
500
-3000
0
0
1
2
3
4
5
Time(s)
6
7
8
9
10
-4000
1.2
1.21
Fig. 9. Rotor current Irq
5
0.5
Stator reactive power(VAR)
1.24
1.25
Time(s)
Fig. 12. Stator current and its zoom
According to (Fig.8) and (Fig.10), we can note that the
references of the active and reactive stator power are well
followed rapidly by the generator DFIG. We can also see
that the stator active power Ps (Fig. 8) depends on the
quadrature rotor current Iqr (Fig. 9) and the stator reactive
power Qs (Fig. 10) depends on the direct rotor current Idr
(Fig. 11). However, there is good decoupling between the
two control axes (d and q) with small oscillations.
-0.5
-1
-1.5
Qsmesured
Qsref
-2
-2.5
-3
The (Fig. 12) shows that the stator currents are
sinusoidal in shape, which implies a clean energy without
harmonics provided or absorbed by the DFIG.
-3.5
-4
0
1.23
stator reactive power DFOC
x 10
0
-4.5
1.22
1
2
3
4
5
Time(s)
6
7
8
9
10
x
Fig. 10. Stator reactive power Qs
Simulation result of IFOC
30
Authorized licensed use limited to: University of Cape Town. Downloaded on November 04,2022 at 09:37:50 UTC from IEEE Xplore. Restrictions apply.
5
0
stator current is abc (A) IFOC
stator active power IFOC
x 10
4000
Ps(W)
Psmesured
Psref
-2
3000
-4
2000
1000
is abc(A)
-6
-8
0
-1000
-10
-2000
-12
0
1
2
3
4
5
Time(s)
6
7
8
9
10
-3000
Fig. 13. Stator power active
-4000
0
1
2
3
4
5
Time(s)
6
7
8
9
10
rotor current Irq (A) IFOC
4000
3500
stator current is abc (A) IFOC
3000
3000
Irq (A)
2500
2000
2000
1500
1000
is abc(A)
1000
500
0
0
-1000
0
1
2
3
4
5
Time(s)
6
7
8
9
10
-2000
Fig. 14. Rotor current Irq
2
-3000
1.11
5
1.12
stator reactive power IFOC
x 10
Qsmesured
Qsref
1
1.13
1.14
1.15
Time(s)
1.16
1.17
1.18
1.19
Fig. 17. Stator current and its zoom
0
The figure (Fig.13 and 15) show the performance of the
indirect control of the active and reactive power. This is
confirmed by the perfect decoupling with a reduction of the
undulations in the active and reactive stator power,
consequently, the harmonics are minimized.
Qs(VAR)
-1
-2
-3
-4
-5
-6
0
1
2
3
4
5
Time(s)
6
7
8
9
According to (Fig. 17) we can see that the stator currents
obtained are also sinusoidal in shape with an improvement
in quality compared with those obtained by a direct control.
10
Fig. 15. Stator reactive power
V.
2000
1500
First, we started by modeling both the turbine, then
Doubly Fed Induction Generator DFIG in order to apply the
flux orientation control (FOC).
Ird(A)
1000
500
According to this study, we found that direct control is
the simplest to implement, but not the most efficient.
However, the indirect method allows us, to have an
inefficient system. It is certainly more complex to
implement compared to direct control, but will have optimal
operation of electrical generation system by minimizing
potential problems related to parametric variations of the
DFIG.
0
-500
-1000
CONCLUSION:
This article presents a comparative study between the
direct and indirect field oriented control of the Doubly Fed
Induction Generator DFIG integrated in a wind system.
rotor current Ird (A) IFOC
0
1
2
3
4
5
Time(s)
6
7
8
9
10
Fig. 16. Rotor current Ird
As perspective, this work can be continued and
completed by the implementation of this command in an
FPGA.
31
Authorized licensed use limited to: University of Cape Town. Downloaded on November 04,2022 at 09:37:50 UTC from IEEE Xplore. Restrictions apply.
REFERENCES :
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
M. Verij Kazemi, A. S. Yazdankhah, H. M. Kojabadi, Direct power
control of DFIG based on discrete space vector modulation,
Renewable Energy, Vol. 35, pp. 1033-1042, 2010.
R. Penaa, R. Cardenasb, E. Escobarb, J. Clarec, P. Wheelerc, Control
strategy for a doubly-fed induction generator feeding an unbalanced
grid or stand-alone load, Electric Power Systems Research, Vol. 79,
pp. 355- 364, 2009
Bekakra, Y. and Ben Attous, D. (2011) ‘ Sliding mode controls of
active and reactive power of a DFIG with MPPT for variable speed
wind energy conversion’, Australian Journal of Basic and Applied
Sciences, Vol. 5, No. 12, pp.2274–2286
Ghoudelbourk, Sihem, et al. "MPPT control in wind energy
conversion systems and the application of fractional control (PIα) in
pitch windturbine." International Journal of Modelling, Identification
and Control 26.2 (2016): 140-151.
B. Bossoufi, M. Karim, A. Lagrioui, M. Taoussi, A. Derouich
Observer backstepping control of DFIG-generators for wind turbines
variable-speed: FPGA-based implementation Renew. Energy, 81
(Sep. 2015), pp. 903–917
Y. BEKAKRA, Contribution à l’Etude et à la Commande Robuste
d’un Aérogénérateur Asynchrone à Double Alimentation, Thèse de
Doctorat, université Mohamed Khider – Biskra, 2014.
M.Allam, B. Dehiba, M.Abid , Y. Djeriri et Redouane Adjoudj,
“Etude comparative entre la commande vectorielle directe et
indirecte de la Machine Asynchrone à Double Alimentation(MADA)
dédiée à une application éolienne” Journal of Advanced Research in
Science and Technology, 2014, 1(2), 88-100
Y. Bekakra, D. Benattous . Active and Reactive Power Control of a
DFIG with MPPT for Variable Speed Wind Energy Conversion
using Sliding Mode Control, World Academy of Science, 2011.
K. Sejir, «Commande Vectorielle d’une Machine Asynchrone
Doublement Alimentée (MADA) », Thèse de Doctorat de l’Institut
National Polytechnique de Toulouse, France, 2006.
A. Medjber, A. Moualdia, A. Mellit, M.A. Guessoum, Commande
Vectorielle Indirecte d’un Générateur Asynchrone Double Alimenté
Appliqué dans un Système de Conversion Eolien, (Manuscript
received August 18, 2012, Electrique), Lyon, Décembre, 2008
A.Tarfaya , D. Dib , M. Ouada “ Study Contribution to Control
Optimization of a Wind Turbine based on a DFIG” International
Conference on Mechanical And Industrial Engineering
(ICMAIE’2015) June 10-11, 2015 Antalya (Turkey).
Poitiers, F., Bouaouiche, T. and Machmoum, M. (2009) ‘Advanced
control of a doubly-fed induction generator for wind energy
conversion’, Electric Power Systems Research, Vol. 79, No. 7,
pp.1085–1096
S. Heier,"Wind energy conversion systems", John Wiley & Sons
Inc.,New York, 1998.
Benoît Robyns, Bruno Francois, Philippe Degobert, Jean Paul
Hautier, Vector control of induction machines, SpringerVerlag
London 2012.
32
Authorized licensed use limited to: University of Cape Town. Downloaded on November 04,2022 at 09:37:50 UTC from IEEE Xplore. Restrictions apply.