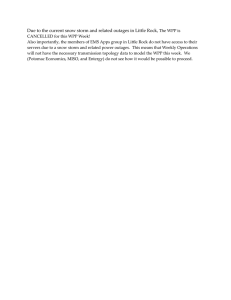
energies Article Selection of Inertial and Power Curtailment Control Methods for Wind Power Plants to Enhance Frequency Stability SungHoon Lim 1 , Seung-Mook Baek 2, * and Jung-Wook Park 1, * 1 2 * School of Electrical & Electronic Engineering, Yonsei University, Seoul 03722, Korea; sam9489@yonsei.ac.kr Division of Electrical, Electronic & Control Engineering, Kongju National University, Cheonan 31080, Korea Correspondence: smbaek@kongju.ac.kr (S.-M.B.); jungpark@yonsei.ac.kr (J.-W.P.) Abstract: As renewable energy penetrates the power system, system operators are required to curtail output power from generation units to balance the power supply and demand. However, large curtailment from wind power plants (WPPs) may instantly cause excessive output power decrement, causing system frequency to drop significantly before reaching its nominal value. In order to solve this problem, this paper proposes a cooperative control framework to determine the operation of WPPs in two control methods, which are the stepwise inertial control (SIC) method and the curtailed control method. The proposed framework first determines the WPPs to operate in the curtailed control method to provide the required power curtailment. Next, it determines the WPPs to operate in the SIC method considering their releasable kinetic energy to provide an effective inertial response and compensate for the sudden excessive output power decrement caused by other WPPs operated in the curtailed control method. Therefore, each WPP is operated in one of two control methods to provide required power curtailment while reducing the sudden excessive output power decrement. To verify the effectiveness of the proposed cooperative control framework, several case studies are carried out on the practical South Korea electric power system. Citation: Lim, S.; Baek, S.-M.; Park, J.-W. Selection of Inertial and Power Curtailment Control Methods for Keywords: frequency stability; power curtailment; stepwise inertial control; supply and demand; wind power plant Wind Power Plants to Enhance Frequency Stability. Energies 2022, 15, 2630. https://doi.org/10.3390/ en15072630 1. Introduction Academic Editors: Ziad M. Ali, Worldwide, many countries are installing the high penetration of renewable energy, especially wind and solar, for the transition to renewable energy sources. According to the report from the International Renewable Energy Agency (IRENA) [1], the capacity of renewable energy in 2020 was 291.7 GW in the United States, 100.6 GW in Canada, 55.4 GW in France, 47.4 GW in the United Kingdom, 32.9 GW in Sweden, 894.9 GW in China, 103.5 GW in Japan, and 134.3 GW in India. In particular, the renewable energy capacity of South Korea in 2020 was 21 GW, and the wind and photovoltaic take the largest portion. Moreover, the South Korean government has planned to increase the renewable energy generation rate to 20% by 2030. To do so, they are planning to install wind power plants (WPPs) and photovoltaic up to 17.7 and 5.7 GW, respectively, until 2030. However, many studies have reported that high renewable energy penetration may cause several stability problems [2–6]. In terms of frequency stability, the renewable energy penetration replaces the conventional synchronous generators (SGs) participating in various ancillary services, resulting in various frequency stability problems. For example, when a large disturbance occurs in the power system, conventional SGs provide power reserve and inertial response (IR) to support the frequency stability. However, distributed generators (DGs) normally operate on the maximum power point tracking (MPPT) control method, which cannot provide additional frequency stability support. Therefore, the penetration of DGs operating on this control method decreases the frequency stability supports. For the power system with a low wind power penetration level (WPPL), the WPPs operating in the MPPT control method have caused a minor frequency stability problem. Omar Abdel-Rahim and Shady H. E. Abdel Aleem Received: 7 March 2022 Accepted: 31 March 2022 Published: 3 April 2022 Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. Copyright: © 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https:// creativecommons.org/licenses/by/ 4.0/). Energies 2022, 15, 2630. https://doi.org/10.3390/en15072630 https://www.mdpi.com/journal/energies Energies 2022, 15, x FOR PEER REVIEW Energies 2022, 15, 2630 2 of 15 penetration of DGs operating on this control method decreases the frequency stability 2 of 14 supports. For the power system with a low wind power penetration level (WPPL), the WPPs operating in the MPPT control method have caused a minor frequency stability problem. However,asasWPPL WPPLincreases, increases,WPPs WPPsoperating operatingon onthis thiscontrol controlmethod methodare arecausing causingsevere severe However, frequency stability problems [7]. Moreover, the variability and uncertainty of renewable frequency stability problems [7]. Moreover, the variability and uncertainty of renewable energyresources resources are causing severe problems in the power supply demand. Thereenergy are causing severe problems in the power supply and and demand. Therefore, fore, the system operator may require to operate in different methods other the system operator may require WPPs WPPs to operate in different controlcontrol methods other than than the MPPT to provide frequency anda curtail the MPPT controlcontrol methodmethod to provide frequency stabilitystability supportsupport [8,9] and[8,9] curtail certaina certain of amount power tothe maintain the power [10]. methods The control methods for amount power of to maintain power balance [10].balance The control for WPPs other WPPs other than the MPPT control method are summarized in Figure 1. than the MPPT control method are summarized in Figure 1. Wind power plants MPPT control method - No frequency stability support Virtual inertial control method Frequency-based inertial control method - Frequency stability support (Inertial response) Stepwise inertial control method Curtailed control method Proportional curtailment control method - Frequency stability support (Power reserve) - Balancing power supply and demand Constant curtailment control method Figure 1. Classification of WPP control methods. Figure 1. Classification of WPP control methods. Tosolve solvethe the frequency frequency stability researchers have deTo stability problem problemcaused causedby byhigh highWPPL, WPPL, researchers have veloped a control method for WPPs to provide IR. In order to provide IR by WPPs, there developed a control method for WPPs to provide IR. In order to provide IR by WPPs, there aretwo twotypes typesofofvirtual virtualinertial inertialcontrol control(VIC) (VIC)methods, methods,which whichare arethe thefrequency-based frequency-based are inertial control (FBIC) method and the stepwise inertial control (SIC) inertial control (FBIC) method and the stepwise inertial control (SIC) methodmethod [11–13].[11–13]. These These two control methods thethe IRkinetic by the kinetic from the WPPs. However, two control methods provideprovide the IR by energy energy from the WPPs. However, while while the provides former provides the IR system frequency change, latter is indethe former the IR based onbased systemonfrequency change, the latter isthe independent of pendent the system frequency change provides to the according to Therefore, its control the systemof frequency change and provides theand IR according itsIR control scheme. scheme. Therefore, the SIC method is applied more variously for applications. the SIC method is applied more variously for applications. On the other hand, WPPs operated by the curtailed can provide On the other hand, WPPs operated by the curtailed controlcontrol methodmethod can provide power power when reserve when a disturbance in the powerFor system. For the control curtailed control reserve a disturbance occurs inoccurs the power system. the curtailed method, method, there are proportional curtailment control andcurtailment constant curtailment conthere are proportional curtailment control (PCC) and(PCC) constant control (CCC) trol (CCC) methods [14].curtails The former curtails the output of WPP according to its methods [14]. The former the output power of WPPpower according to its proportional coefficient. Therefore, depending ondepending the wind speed, size of thethe power curtailment proportional coefficient. Therefore, on thethe wind speed, size of the power differs. On the other hand, latter curtails constant output power.output power. curtailment differs. On thethe other hand, the latter curtails constant Moreover, Moreover,asasthe theWPPL WPPLincreases, increases,maintaining maintainingthe thebalance balancebetween betweenpower powersupply supply and anddemand demandisisbecoming becomingmore moreimportant importantthan thanever. ever.Moreover, Moreover,the theamount amountofofrequired required power powercurtailment curtailmentincreases increasesfor forhigh highWPPL. WPPL.However, However,excessive excessiveoutput outputpower powerdecrement decrement instantly switchingfrom fromthe theMPPT MPPTcontrol controlmethod methodto instantlyoccurs occursfrom fromWPPs WPPs in in the process of switching tothe thecurtailed curtailedcontrol controlmethod. method.As Asaa result, result, this causes the the system system frequency frequencydip dipbefore before reaching its nominal value. In particular, if this frequency dip is beyond the dead-band reaching its nominal value. In particular, if this frequency dip is beyond the dead-bandofof the it will cause other SGsSGs to compensate for the loss. loss. This paper proposes thegovernor, governor, it will cause other to compensate forpower the power This paper prothe design of a cooperative control framework, which determines each WPP operation poses the design of a cooperative control framework, which determines each WPP operaintion curtailed controlcontrol and SIC methods. Therefore, when system require power in curtailed and SIC methods. Therefore, when operators system operators require curtailment to maintain the power the WPPs operating by the former the power curtailment to maintain thebalance, power balance, the WPPs operating by theprovide former prorequired power curtailment, and other WPPs operating by the latter compensate for the vide the required power curtailment, and other WPPs operating by the latter compensate excessive output power by IR. by IR. for the excessive outputdecrement power decrement This paper is organized as follows. This paper is organized as follows.Section Section22describes describesthe theoperation operationof ofthe theWPPs, WPPs, including MPPT control, curtailed control, and SIC methods. In Section 3, the proposed including MPPT control, curtailed control, and SIC methods. In Section 3, the proposed cooperative cooperativecontrol controlframework frameworkimplementation implementationisisdescribed describedwith withits itstheoretical theoreticalanalysis. analysis. Section 4 describes the characteristics of the practical South Korea electric power system and verifies the effectiveness of the proposed framework with several case studies using the DIgSILENT PowerFactory® (Version 2018, DIgSILENT GmbH, Gomaringen, Germany) [15]. Finally, conclusions are given in Section 5. 2. Wind Power Plants Operation 2.1. Characteristics of Permanent Magnet Synchronous Generator and MPPT Control M In this paper, a type-4 wind turbine generator, which is a permanent mag 3 of 14 chronous generator (PMSG), is considered for wind power. Generally, PMSG co a rotor side converter (RSC), DC-link circuit with a capacitor, and grid side c 2.(GSC) Wind Power Plants Operation [16]. Moreover, the PMSG control system provides a reference signal for p 2.1. Characteristics of Permanent Magnet Synchronous Generator and MPPT Control Methodon the po trol, RSC control, and GSC control methods. Furthermore, depending this paper, the a type-4 wind turbine generator, which is a permanent magnet syntemIncondition, active power reference (Pref ) is determined based on MPPT cont chronous generator (PMSG), is considered for wind power. Generally, PMSG consists and curtailed control methods. of a rotor side converter (RSC), DC-link circuit with a capacitor, and grid side converter Besides the power reference determined by each control method, the me (GSC) [16]. Moreover, the PMSG control system provides a reference signal for pitch control, power from wind source is obtained and calculated asthe power system RSC control, andthe GSC control methods. Furthermore, depending on condition, the active power reference (Pref ) is determined based on MPPT control, VIC, and 1 3 curtailed control methods. = P ρπR2Vwind Cmethod, mec P (λ, β) the mechanical Besides the power reference determined by2 each control power from the wind source is obtained and calculated as where Pmec is the mechanical power extracted from the wind, ρ is the air density 1 2 3 CPis (λ,the β) wind speed, and CP is(1) Pmec of = 46.5 ρπRm, Vwind kg/m3, R is the rotor radius Vwind the pow 2 cient based on tip speed ratio (λ) and pitch angle (β). Normally, WPPs are operate where Pmec is the mechanical power extracted from the wind, ρ is the air density of MPPT control method to provide maximum power in a steady state [17]. As s 1.225 kg/m3 , R is the rotor radius of 46.5 m, Vwind is the wind speed, and CP is the power Figure 2,based the active power reference is determined by theWPPs MPPT PMPPT, wh coefficient on tip speed ratio (λ) and pitch angle (β). Normally, arecurve, operated is between minimum speed limit min) and speed lim speed (ωr)control by the MPPT methodthe to provide maximum power in (ω a steady statemaximum [17]. As shown inMoreover, Figure 2, thePMPPT activeispower reference calculated as is determined by the MPPT curve, PMPPT , when rotor speed (ω r ) is between the minimum speed limit (ω min ) and maximum speed limit (ω max ). Moreover, PMPPT is calculated as πρR5C PMPPT5 (ωr ) = PMPPT (ωr ) = πρR CP,opt 2λ3opt P,opt 3 3 opt 2λ × ωr 3 = kopt × ωr 3 × ωr = k opt × ωr 3 (2) where CP,opt and λopt are the optimal CP and λ values determined by the MPPT pape where CP,optrespectively, and λopt are theand optimal CPthe andcoefficient λ values determined by the curve. MPPT control method, kopt is of the MPPT In this method, respectively, and kopt is the coefficient of the MPPT curve. In this paper, CP,opt is set to 0.447 with β at 0 and λopt at 7.2. set to 0.447 with β at 0 and λopt at 7.2. Active power (pu) Energies 2022, 15, 2630 Figure 2. MPPT and operational characteristics Figure 2. MPPT curvecurve and operational characteristics of WPPs. of WPPs. 2.2. Curtailed Control Method 2.2. Curtailed Control Method As system operators need to maintain the power balance, they may require WPPs to operators toconsidering maintain the power balance,Asthey may require operateAs in system the curtailed control need method the wind condition. mentioned operate in the control method considering wind condition. previously, there arecurtailed CCC and PCC methods to curtail output powerthe from WPPs. However, As m power curtailment byare the CCC formerand method only available at a specific output power previously, there PCCismethods to curtail output power from WPP ever, power curtailment by the former method is only available at a specific outpu Energies 2022, 15, x FOR PEER REVIEW Energies 2022, 15, 2630 4 of 15 level [14]. Therefore, the latter method is preferably applied to curtail output 4power of 14 from WPPs. The curtailed power using the PCC method is defined as P (ω ) = α ×P (ω ) cur preferably r cur applied MPPT tor curtail output power from level [14]. Therefore, the latter method is WPPs. The curtailed power using the PCC method is defined as (3) where Pcur is the power reference by the PCC method and αcur is the coefficient for the curtailed power curve. Therefore, switches to Pcur (ωr )when = αcurWPP × PMPPT (ωr ) from the MPPT control method (3) the PCC method, the output power decreases by ΔPdown as where Pcur is the power reference by the PCC method and αcur is the coefficient for the Pdown (WPP ωr ) =switches PMPPT ( ωfrom r ) − Pcur r) curtailed power curve. Therefore,Δwhen the( ωMPPT control method to = (1 − α ) × P ( ω ) the PCC method, the output power decreases by ∆Pdown as MPPT r cur (4) As shown in Figure 3, the ∆Pdown (ωoutput − Pcur (ωr ) from point A to B when WPP is r ) = Ppower r )decreased MPPT ( ωis (4) switched from the MPPT control method to the PCC method. = (1 − αcur ) × PMPPT (ωr ) However, the output power cannot maintain the power at point B. This is because a difference exists between the meAs shown in Figure 3, thepower outputreference. power is decreased from to B when WPP chanical power and active Therefore, thepoint rotorAspeed is accelerated by is switched from the MPPT control method to the PCC method. However, the output the swing equation as power cannot maintain the power at point B. This is because a difference exists between the mechanical power and active power reference. dω Therefore, the rotor speed is accelerated 2Hωr r = Pmec − Pref (5) by the swing equation as dt dωr 2Hωr = Pmec − Pre f (5) where H is the inertia constant of dt the PMSG. As a result, the rotor speed is accelerated where is theBinertia theintersection PMSG. As a result, is accelerated from H point to C, constant which isofthe of thethe Prefrotor andspeed Pmec. Therefore, it from can be conpoint B to C, which is the intersection of the P and P . Therefore, it can be concluded mec ref cluded that when WPP switches from the MPPT control method to the curtailed control that when the WPP switches from the MPPT control method topoint the curtailed control method, method, active power immediately decreases from A to B and then reaches point the active power immediately decreases from point A to B and then reaches point C. In C. In other words, when WPPs are required to curtail by ΔPcur, the unwanted power decother words, when WPPs are required to curtail by ∆Pcur , the unwanted power decrement rement of ΔPdec occurs. Moreover, ΔPdec becomes significant as WPPL and the required of ∆Pdec occurs. Moreover, ∆Pdec becomes significant as WPPL and the required power power curtailment curtailment increases.increases. MPPT curve Mechanical power curve A ΔPdown B ΔPcur ΔPloss C Curtailed power curve Figure3.3.Operational Operational characteristics of curtailed the curtailed control method for WPP. Figure characteristics of the control method for WPP. 2.3. Control Method 2.3.Virtual VirtualInertial Inertial Control Method While conventional SGs provide various frequency responses, such as power reserve While conventional SGs provide various frequency responses, such as power reserve and IR, renewable energy-based DGs are less capable of providing these frequency reand IR, renewable energy-based DGs are less capable of providing these frequency responses. However, recent studies have developed a VIC method for WPPs to provide IR sponses. However, recent studies have developed a VIC methodWPPs for WPPs to provide IR with the releasable kinetic energy stored in the rotating rotor. Therefore, can provide with the releasable kinetic storedfrequency in the rotating WPPs can prosimilar IR as conventional SGsenergy and support stabilityrotor. whenTherefore, a large disturbance, vide similar IR as conventional SGs and support frequency stability when a large disturbsuch as a generation trip occurs in the power system [11–13]. ance, as a generation occurs in the power system for [11–13]. Assuch mentioned previously,trip there are FBIC and SIC methods the WPP VIC method. The WPPs operated bypreviously, the FBIC method provide IRSIC based on the frequency deviation As mentioned there are FBICthe and methods for the WPP VIC method. and of change of frequency change (RoCoF) [13]. On other hand, operated Therate WPPs operated by the FBIC method provide the the IR based on theWPPs frequency deviation by the SIC method provide the IR independently from the frequency but based on the and rate of change of frequency change (RoCoF) [13]. On the other hand, WPPs operated deceleration acceleration stage as shown in Figure 4. As P0 on the ref is increased by the SIC and method provide the[11], IR independently from thePfrequency butfrom based deceleration and acceleration stage [11], as shown in Figure 4. As Pref is increased from P0 to Pup by the SIC method, the right term of the swing equation of Equation (5) beco negative. As a result, the rotor speed starts to decelerate right after Pref is increased f P0 to Pup. Then, to recover the rotor speed to ω0, the SIC method decreases the Pref from Energies 2022, 15, 2630 of 14 Energies 2022, 15, x FOR PEER REVIEW 5 of515 to Pdown. totoPup right term termof ofthe theswing swingequation equationofofEquation Equation becomes Pupby bythe theSIC SIC method, method, the right (5)(5) becomes negative.As Asa aresult, result,the therotor rotorspeed speedstarts startstotodecelerate decelerateright rightafter afterPPrefref is is increased increased from P0 negative. to.PThen, up. Then, to recover rotor speedtotoωω00,,the the SIC SIC method refref from PupPup toPP0 up to recover thethe rotor speed method decreases decreasesthe thePP from Pdown.. totoPdown Figure 4. Operational characteristics of the conventional SIC method. (a) Active power and speed plane. (b) Active power and time plane. Figure 4. Operational characteristics of been the conventional SIC method. Activestudies power and rotor improved the SICcharacteristics method has developed [11],(a)many FigureAfter 4. Operational of the conventional SICin method. (a) Active power have and rotor speed plane. (b) Active power and time plane. SIC method provide power speed plane. (b) to Active poweractive and time plane. more effectively and improve the frequency stab [18,19]. While themethod SIC method [11] increases power by 0.1 without considering After the SIC has been in developed in [11], many studies havepu improved this After the SIC method has been developed in [11], many studies have improved this SIC SIC method to provide active power more effectively and improve the frequency WPPL orprovide wind condition, the SIC method recently developed instability [19]stability increases the po method toWhile active powerin more effectively and improve thewithout frequency [18,19]. [18,19]. the SIC method [11] increases power by 0.1 pu considering the regarding the prevention of secondary frequency dip while providing effective sup While the method in [11] power by 0.1 pu without considering WPPL orSIC wind condition, theincreases SIC method recently developed in [19] increases the the WPPL power or for frequency nadir. Therefore, this SIC method increases the power by ΔP SIC as wind condition, the SIC method recentlyfrequency developed [19] increases powersupport regarding regarding the prevention of secondary dipinwhile providingthe effective the secondary frequency whileincreases providing effective support for frequency forprevention frequency of nadir. Therefore, this SICdip by m mΔPSIC as ΔPSICmethod = Pthe (ω0 ) −by P0the ×(power ω − ω ) nadir. Therefore, this SIC method increases power ∆P as 0 min T -lim SIC m ΔPSIC = [ PT -lim (ω0 ) − P0 ]×(ω0m − ωmin ) (6) m where PT-lim(ω0) is the power atT-lim ω0(based limit, ∆PSIC = [P ω0 ) − on P0 ] the × (torque ω0m − ωmin ) and m is an index (6) depen where PT-lim(ω0) is the power at ω0 based on the torque limit, and m is an index depending on the WPPLs. Note that m is decreased as WPPL increases. This is because if each W on the WPPLs. m isatdecreased increases. if each WPP where PT-lim (ω 0 )Note is thethat power ω 0 basedasonWPPL the torque limit,This andismbecause is an index depending SIC in high WPPL, the power decrement after frequ provides thesame same amount ofSICΔP in high WPPL, the power decrement after frequency provides the amount of ΔP on the WPPLs. Note that m is decreased as WPPL increases. This is because if each WPP nadir (point C’Figure in Figure also becomes result, this may cause o nadir arrestment arrestment C’ in 5) also5) becomes high. As ahigh. result,As thisamay cause other provides the same(point amount of ∆P SIC in high WPPL, the power decrement after frequency conventional SGs with a slow frequency response speed to compensate, causing a secondconventional SGs with slow frequency response speed compensate, nadir arrestment (point C’ain Figure 5) also becomes high. As atoresult, this maycausing cause a sec ary frequency frequency dip. Therefore, ΔPSIC ΔP is decreased by reducing Equation (6)causing when a (6) w other conventional SGs with a slow frequency response speed toincompensate, ary dip. Therefore, SIC is decreased by m reducing m in Equation WPPL increases. After frequency nadir is arrested, Pref is decreased frommpoint C’ to D’, (6) secondary frequency dip. Therefore, decreased in Equation SIC is is WPPL increases. After frequency∆P nadir arrested,byPreducing ref is decreased from point C’ to and enters the acceleration stage to recover the rotor speed to ω 0. when WPPL increases. After frequency nadir is arrested, P is decreased from point C’ to ref and enters the acceleration stage to recover the rotor speed to ω0. D’, and enters the acceleration stage to recover the rotor speed to ω 0 . [ ] Deceleration stage: Aʹ - Bʹ - Cʹ - Dʹ Acceleration stage: Dʹ - EʹAʹ - Aʹ Deceleration stage: - Bʹ - Cʹ - Dʹ Pup Pup Torque limit Acceleration stage: Dʹ Mechanical Torque limit power curve Eʹ - Aʹ C' B' PSIC B' C' D' Mechanical power curve MPPT curve E' D' A' E' min MPPT curve , D , C , E PSIC PA' ref 0 max Rotor speed (pu) Figure 5. Operational characteristics of the recent SIC method. , , , min D C E 0 Rotor speed (pu) Figure5.5.Operational Operational characteristics the SIC recent SIC method. Figure characteristics of the of recent method. Pref max Energies2022, 2022,15, 15,2630 x FOR PEER REVIEW Energies 6 6ofof1514 Frequency (Hz) Active power (MW) Proposed Cooperative Cooperative Control Control Framework 3.3. Proposed Framework As the WPPL increases, power As the WPPL increases, power curtailment curtailment becomes becomesessential essentialtotobalance balancethe thepower power supply and demand. However, as mentioned previously, the increment on required supply and demand. However, as mentioned previously, the increment on required power in afrequency severe frequency dipreaching before power curtailment cansignificant cause significant ΔPdec, resulting curtailment can cause ∆Pdec , resulting in a severe dip before reaching itsvalue. nominal value. in AsFigure shown6,in Figure 6, when WPPs are switched from the its nominal As shown when WPPs are switched from the MPPT control MPPT control method to the curtailed control method, in order to maintain the power method to the curtailed control method, in order to maintain the power balance and restore balance and restore frequency f0 to nominal ), theof output poweris the frequency from the f 0 to nominalfrom frequency (fnorm ), frequency the output(fnorm power the WPPs . Asfrequency a result, the frequency falls signifof the WPPs is instantly decreased further ΔPdecthe instantly decreased further by ∆Pdec . As aby result, falls significantly before icantly before reaching f norm , and this problem becomes severe as WPPL is increased. Morereaching fnorm , and this problem becomes severe as WPPL is increased. Moreover, suppose over, supposefalls the beyond frequency beyondof the of the governor reaching the frequency thefalls dead-band thedead-band governor before reaching fbefore norm . In that case, f norm . In that case, it will activate the governor response from SGs to compensate for the it will activate the governor response from SGs to compensate for the power loss using the power loss using the primary frequency reserve. primary frequency reserve. Figure 6. Frequency dip occurrence due to excessive power decrement during power curtailment. Figure 6. Frequency dip occurrence due to excessive power decrement during power curtailment. (a) Output power of WPPs operated in curtailed control method. (b) Frequency response when (a) Output power ofoccurs. WPPs operated in curtailed control method. (b) Frequency response when power power curtailment curtailment occurs. In order to solve this frequency dip problem, the proposed cooperative control frameIn order to solve this frequency dip problem, the proposed cooperative control framework determines the overall WPPs operation in the SIC and curtailed control methods to work determines the overall WPPs operation in the SIC and curtailed control methods to provide the required power requirement while improving the frequency dip. The main provide the required power requirement while improving the frequency dip. The main reason for the frequency dip occurrence during the power curtailment is the sudden sigreason for the frequency dip occurrence during the power curtailment is the sudden signifinificant output power decrement from WPPs. To solve this problem, the proposed framecant output power decrement from WPPs. To solve this problem, the proposed framework work operates some WPPs by the SIC method during the power curtailment. Therefore, operates some WPPs by the SIC method during the power curtailment. Therefore, they they instantly increase the power by providing IR for a short period to compensate for the instantly increase the power by providing IR for a short period to compensate for the power power decrement, and, after providing IR, they decrease the power back to its initial value decrement, and, after providing IR, they decrease the power back to its initial value (see (see Figure 5). As a result, the excessive power decrement of ΔPdec caused by the curtailed Figure 5). As a result, the excessive power decrement of ∆Pdec caused by the curtailed concontrol method may be compensated while improving the frequency dip without disturbtrol method may be compensated while improving the frequency dip without disturbing ing the frequency recovery to fnorm. the frequency recovery to fnorm . The overall procedure to implement the proposed cooperative control framework is The overall procedure to implement the proposed cooperative control framework is shown in Figure 7, and the detailed operations are explained below. Note that the SIC shown in Figure 7, and the detailed operations are explained below. Note that the SIC method in [19] is used for the VIC method, and CCC and PCC methods are considered for method in [19] is used for the VIC method, and CCC and PCC methods are considered for curtailed control methods in the proposed framework. curtailed control methods in the proposed framework. 1. Stage I—As power curtailment is required to maintain the power balance, parameters 1. Stage I—As power curtailment is required to maintain the power balance, parameters including the iteration number (k) and the total sum of the power curtailment from including the iteration number (k) and the total sum of the power curtailment from WPPs (Pcur,tot) are initialized. Then, the proposed coordination control framework beWPPs (Pcur,tot ) are initialized. Then, the proposed coordination control framework gins. In this stage, the framework firstly assigns the WPPs to be operated by the PCC begins. In this stage, the framework firstly assigns the WPPs to be operated by the method to provide the required power curtailment (Pcur,req). Considering the technical PCC method to provide the required power curtailment (Pcur,req ). Considering the operation limit [10], αcur is assumed to be 5%. Note that WPPs are assigned to be optechnical operation limit [10], αcur is assumed to be 5%. Note that WPPs are assigned erated by this method until Pcur,tot becomes higher than Pcur,req. to be operated by this method until Pcur,tot becomes higher than Pcur,req . 2. Stage II—As Pcur,tot becomes larger than Pcur,req in the previous stage, the system oper2. Stage II—As Pcur,tot becomes larger than Pcur,req in the previous stage, the system ator needs to decrease the Pcur,tot to curtail the exact amount of Pcur,req. If WPPs curtail operator needs to decrease the Pcur,tot to curtail the exact amount of Pcur,req . If WPPs curtail more than Pcur,req , the frequency will not recover to fnorm but will converge to value. Therefore WPPk is operated by the CCC method to curtail the exact amount of insufficient power curtailment (ΔPcur,CCC). As a result, while WPP1 to WPPk-1 are operated by the PCC method with αcur of 5%, WPPk is operated by the CCC method with ΔPcur,CCC to curtail the exact amount of Pcur,req. 3. Stage III—After determining the WPPs to be operated by the curtailment control 7 of 14 method (PCC and CCC methods), the other WPPs are determined to be operated by the SIC method to compensate for the power decrement caused by other WPPs operated by PCC and CCC methods. To do so, the total available IR for WPPk+1 to WPPn (ΔP SIC,totvalue. ) is calculated as WPPk is operated by the CCC method to curtail the exact a lower Therefore Energies 2022, 15, 2630 amount of insufficient power curtailment (∆Pcur,CCC ). As a result, while WPP1 to n WPPk− 1 are operated by the PCC method ΔPSIC,tot = with ΔPSIC,iαcur of 5%, WPPk is operated by (7)the i = k +1 CCC method with ∆Pcur,CCC to curtail the exact amount of Pcur,req . 3. Stage III—After determining the the WPPs to be power operated by the curtailment However, if ΔPSIC,tot is larger than required curtailment, it will causecontrol anmethod (PCC and CCC methods), the other WPPs are determined to be the operated other power imbalance. Therefore, ΔPSIC for each WPP is modified considering reby the SICcurtailment method toas compensate for the power decrement caused by other WPPs quired power operated by PCC and CCC methods. To do so, the total available IR for WPPk+1 to Pcur,req m m WPPn (∆PSIC,tot ) isΔcalculated PSIC _mod,i = Pas (8) T -lim, i ( ω 0 ) − P0, i × ( ω 0 − ω min ) Δ PSIC,tot n to WPP provide IR to compensate for the power (7) Therefore, the other WPPs (WPP ∆PSIC,i ∆Pk+1SIC,tot = n)∑ decrement without causing a power imbalance.i=k+1 Start (Power curtailment required) Calculate ΔPSIC for WPPk+1, …, WPPn by Equation (6) Initialize parameters (k = 0 and ΔPcur,tot = 0) ΔPcur,CCC = Yes k −1 Pcur,req − ΔPcur,i i =1 Calculate ΔPSIC ,tot By Equation (7) Is Pcur,req < Pcur,tot ? No k=k+1 Operate WPPk by CCC method Calculate ΔPSIC ,mod for WPPk+1,…, WPPn by Equation (8) Operate WPPk+1, …, WPPn by SIC method Stage III : Determination of WPPs (WPPk+1 to WPPn) to be operated by SIC method Stage II : Determination of WPPk to be operated by CCC method End (Provide required power curtailment with IR support) WPP1 to WPPk-1: PCC method WPPk: CCC method WPPk+1 to WPPn: SIC method Operate WPPk by PCC method k Pcur,tot = ΔPcur,i i =1 Stage I : Determination of WPPs (WPP1 to WPPk-1) to be operated by PCC method Figure7.7.Implementation Implementationof of the the proposed proposed cooperative Figure cooperativecontrol controlframework. framework. In summary, amount of power is curtailed from WPPs,itexcessive However, if ∆Pwhen larger than the required power curtailment, will causepower another SIC,totaislarge decrement instantly occurs during the power curtailment, which causes a significant frepower imbalance. Therefore, ∆PSIC for each WPP is modified considering the required quency drop before the frequency recovers to f norm . To solve this problem without disturbpower curtailment as m ∆PSIC_mod,i = [ PT-lim,i (ω0 ) − P0,i ] × (ω0m − ωmin ) Pcur,req ∆PSIC,tot (8) Therefore, the other WPPs (WPPk+1 to WPPn ) provide IR to compensate for the power decrement without causing a power imbalance. In summary, when a large amount of power is curtailed from WPPs, excessive power decrement instantly occurs during the power curtailment, which causes a significant frequency drop before the frequency recovers to fnorm . To solve this problem without disturbing the power balance, the proposed cooperative control framework operates WPPs partially by the SIC method to provide instant frequency support. In particular, the curtailed control method is first applied to WPPs with PCC methods, and then the CCC method Energies 2022, 15, 2630 8 of 14 is applied to provide the exact power curtailment of Pcur,req . Moreover, the other WPPs that are not operated by the curtailed control method are operated by the SIC method considering the Pcur,req to compensate for the excessive power decrement. 4. Simulation Results To verify the effectiveness of the proposed cooperative control framework, several case studies are carried out on the practical South Korea electric power system using the DIgSILENT PowerFactory® software to provide an effective solution for power curtailment. 4.1. Characteristics of South Korea Electric Power System In the practical South Korea electric power system, there are about 400 SGs with a power capacity of 145 GW. Moreover, the load demand and power supply for one day during winter in 2020 used in the simulation are about 82.4 and 83.9 GW, respectively. Furthermore, the load demand and the power generation considering the types of SGs are given in Table 1 according to the provinces with six areas. Therefore, the South Korea electric power system has regional characteristics. As given in Table 1, area 1, which includes the capital Seoul of South Korea, has the largest load demand. However, it is observed that the power generation in area 1 is much lower than the load demand. Therefore, power is transmitted from the other areas through a high-voltage transmission line, such as 345 and 765 kV transmission lines. Moreover, the types of SGs and their roles are different among areas. For example, nuclear power plants, which take charge of base load power plants, are primarily located in areas 5 and 6. On the other hand, the coal power plants, which take charge of the load-following power plant, are primarily located in area 4. Lastly, the peaking power plants are practically located in areas 1 and 2. Table 1. Load demand and power generation according to areas in winter of early 2020. Area No. 1 2 3 4 5 6 Area Name Seoul/Gyeonggi Incheon Gangwon Chungcheong Jeolla Gyeongsang Power Generation Load Demand (MW) Nuclear (MW) Coal (MW) Combined Cycle (MW) Others (MW) Total (MW) 26,115 7056 2615 14,096 8642 23,871 0 0 0 0 5201 11,791 0 4826 2820 16,886 1111 6786 9717 4697 0 1835 3637 3902 5214 0 1204 359 715 3242 14,931 9523 4024 19,080 10,664 25,721 For wind resources, the currently installed capacity of WPPs is only about 1000 MW in the South Korea electric power system, which is much lower than conventional SGs. However, the South Korean government has planned to install 17.7 GW of WPPs by 2030. Therefore, in this paper, according to the South Korean government’s renewable energy policy and basic plan for long-term electricity supply and demand [20], 20 WPPs shown in Figure 8 are considered. Moreover, their capacity is given in Table 2, and the total capacity is about 10 GW. Furthermore, since the simulation environment of the South Korea electric power system is based on winter in early 2020, the wind speed scenario is based on January 2020 and February 2020, as given in Table 3. 4.2. Case 1—Required Power Curtailment of 606 MW As shown in Figure 9, because of the power imbalance, the initial center of inertia (CoI) frequency [21] is 60.035 Hz, which is higher than fnorm of 60 Hz. Note that the CoI frequency, fCOI , is calculated as m f COI = ∑ HSG,j SSG,j f SG,j j =1 ! m × ∑ HSG,j SSG,j j =1 ! −1 (9) Energies 2022, 15, 2630 9 of 14 where HSG,j and SSG,j are the inertia constant and capacity of the j-th SGs, and fSG,j is the measured frequency of the bus that is connected to the j-th SGs. However, there are many SGs and buses in a practical large-scale power system, making it impossible to measure Energies 2022, 15, x FOR PEER REVIEW the frequency of every bus to obtain fCOI . Therefore, the frequency of SGs with the largest capacity in each area is selected and measured to obtain fCOI . 9o Figure 8. 8. South Korea electric power system with 20with WPPs. Figure South Korea electric power system 20 WPPs. Table 2. 2. Hosting capacity of 20of WPPs. Table Hosting capacity 20 WPPs. Capacity (MW) WPP1 200.1 WPP11 1499.6 WPP3 WPP1 WPP WPP 2 WPP WPP 4 5 3 299 200.1 220.8299 167.9 299 WPP13 WPP14 WPP15 WPP12 154.1 WPP13 1499.6WPP11 878.6 WPP2 299 WPP12 119.6 1499.6 119.6 1499.6 WPP64 WPP 218.5 220.8 WPP16 WPP 1000.514 878.6 Capacity (MW) WPP WPP WPP 57 WPP 6 8 WPP7WPPWPP 8 WPP WPP 9 10 9 170.2 637.1 46 400.2 167.9 218.5 170.2 637.1 46 WPP17 WPP18 WPP19 WPP20 WPP 15 WPP278.3 16 WPP171499.6 WPP18 41.4 WPP19 1000.5 154.1 1000.5 1000.5 278.3 1499.6 WPP 400.2 WPP 41.4 Table 3. Wind speed of 20 WPPs for all cases. Table 3. Wind speed of 20 WPPs for all cases. Wind Speed (m/s) Case 1 (January) Case 2 (February) WPP1 WPP2 WPP3 6.5 7.3 6.8 6.8 WPP11 Case 1 (January) Case 2 (February) 7.4 6.9 Wind Speed (m/s) WPP7 WPP8 WPP9 WPP10 WPP4 WPP5 WPP6 WPP7 WPP8 WPP9 WPP WPP4 WPP5 WPP6 7.7 6.4 6.7 WPP1 WPP2 WPP3 8.7 8.2 8.7 6.8 Case 1 6.5 6.8 7.3 6.3 6.8 6.47.7 6.4 6.7 8.77.5 8.2 6.7 8.7 6.8 8 8.7 7.5 (January)7.2 WPPCase WPP14 WPP15 WPP16 WPP17 WPP18 WPP19 WPP20 2WPP13 12 6.8 8 7.2 6.8 6.3 6.4 8.7 7.5 7.5 6.7 (February) 8 8.5 7.4 7.5 8.1 9 7.6 8.8 7.4 WPP11 WPP12 WPP13 WPP14 WPP15 WPP16 WPP17 WPP18 WPP19 WPP 8.6 8.2 7.9 8.2 7.1 9.1 6.7 8.4 7.4 Case 1 7.4 8 8.5 7.4 7.5 8.1 9 7.6 8.8 7.4 (January) In case2 1, due to wind conditions based on January, 606 MW is required for power Case 6.9 the power 8.6 supply 8.2 and 7.9demand. 8.2 In order 7.1 to curtail 9.1 6066.7 8.4 7.4 curtailment to balance MW, WPP (February) operations are determined using the proposed cooperative control framework shown in 4.2. Case 1—Required Power Curtailment of 606 MW As shown in Figure 9, because of the power imbalance, the initial center of iner (CoI) frequency [21] is 60.035 Hz, which is higher than fnorm of 60 Hz. Note that the C Frequency (Hz) Energies 2022, 15, 2630 Figure 7. As a result, WPPs (WPP1 to WPP9) are operated by the PCC method with an αcur of 5%, and WPP10 is operated by the CCC method with a constant power curtailment of 69.8 MW. On the other hand, when power curtailment occurs from WPPs (WPP1 to WPP10), other WPPs (WPP11 to WPP20) are operated by the SIC method. Note that, since ΔPSIC,tot (210 MW) is much lower than Pcur,req (606 MW), ΔPSIC for WPPs (WPP11 to WPP20) are not modified by Equation (8). 10 of 14 As shown in Figure 10, WPPs (WPP1 to WPP10) determined to be operated by the curtailed control method are curtailed at 20 s. As a result, the imbalance of power supply and demand is solved, and fCOI starts to decrease from 60.04 Hz to fnorm. However, while Figure 7. As a606 result, (WPP WPP9an ) are operated theofPCC method with an αcur MW WPPs is curtailed from additional 230by MW excessive power decrement 1 toWPPs, occurs inoperated the powerby system. Therefore, as shown inconstant Figure 9, fpower COI drops significantly of to of 5%, and WPP the CCC method with a curtailment 10 is 59.964 Hz hand, before recovering to 60 Hz. To solveoccurs this problem, the proposed cooperative 69.8 MW. On the other when power curtailment from WPPs (WPP1 to WPP10 ), control framework operates WPP11 to WPP20 by the SIC method. Thus, they provide an IR other WPPs (WPP 11 to WPP20 ) are operated by the SIC method. Note that, since ∆PSIC,tot of 210 MW at 20 s to compensate for the power decrement. As a result, it clearly shows (210 MW) is much lower than Pcur,req (606 MW), ∆PSIC for WPPs (WPP11 to WPP20 ) are not that the fCOI dip is significantly improved to 59.983 Hz (see the dashed red line in Figure modified by Equation 9). Table 4 (8). summarizes the operation of 20 WPPs during the power curtailment. Figure 9. Results of center of inertia frequency for case 1. Figure 9. Results of center of inertia frequency for case 1. As shown in Figure 10, WPPs (WPP1 to WPP10 ) determined to be operated by the curtailed control method are curtailed at 20 s. As a result, the imbalance of power supply and demand is solved, and fCOI starts to decrease from 60.04 Hz to fnorm . However, while 606 MW is curtailed from WPPs, an additional 230 MW of excessive power decrement occurs in the power system. Therefore, as shown in Figure 9, fCOI drops significantly to 59.964 Hz before recovering to 60 Hz. To solve this problem, the proposed cooperative control framework operates WPP11 to WPP20 by the SIC method. Thus, they provide an IR of 210 MW at 20 s to compensate for the power decrement. As a result, it clearly shows Energies 2022, 15, x FOR PEER REVIEW 11 of 15 that the fCOI dip is significantly improved to 59.983 Hz (see the dashed red line in Figure 9). Table 4 summarizes the operation of 20 WPPs during the power curtailment. Figure 10. Results of output power from WPPs for case 1. (a) WPP1, WPP5, WPP6, WPP9, WPP12, Figure 10. Results of output power from WPPs for case 1. (a) WPP1 , WPP5 , WPP6 , WPP9 , WPP12 , WPP15, WPP20. (b) WPP2, WPP3, WPP4, WPP7, WPP8, WPP10, WPP18. (c) WPP11, WPP14, WPP16. (d) WPP , WPP20, . WPP (b) WPP WPP3output , WPP4 ,power WPP7 ,ofWPP . (c) WPPcontrol . 2 , Total 8 , WPP 10 , WPP 11 , WPPmethod. 14 , WPP16 WPP15 13, WPP17 19. (e) WPPs operated by18curtailed (f) (d) WPP , WPP , WPP . (e) Total output power of WPPs operated by curtailed control method. 13 17 19 Total output power of WPPs operated by SIC method. (f) Total output power of WPPs operated by SIC method. Table 4. Summary of WPPs operation and numerical results for case 1. WPP No. Control method P0 (MW) ΔPcur (MW) ΔPdec (MW) ΔPSIC (MW) Energies 2022, 15, 2630 11 of 14 Table 4. Summary of WPPs operation and numerical results for case 1. WPP No. Control Method P0 (MW) ∆Pcur (MW) ∆Pdec (MW) ∆PSIC (MW) WPP1 PCC 44.2 30.6 11.5 - WPP2 PCC 93.4 64.3 24.4 - WPP3 PCC 75.5 52.2 19.7 - WPP4 PCC 81 55.7 21.2 - WPP5 PCC 35.4 24.5 9.2 - WPP6 PCC 52.8 36.5 13.7 - WPP7 PCC 90 61.7 23.6 - WPP8 PCC 282.1 193.6 73.9 - WPP9 PCC 24.3 16.7 6.4 - WPP10 CCC 101.1 69.8 26.4 - WPP11 SIC 488.1 - - 30.8 WPP12 SIC 49.2 - - 3 WPP13 SIC 739.6 - - 43.9 WPP14 SIC 286 - - 17.5 WPP15 SIC 52.2 - - 3.5 WPP16 SIC 427 - - 28.4 WPP17 SIC 587.4 - - 29.9 WPP18 SIC 98.1 - - 5.1 WPP19 SIC 820.7 - - 47.4 WPP20 SIC 13.5 - - 0.9 Total - 4441.6 605.6 230 210.4 4.3. Case 2—Required Power Curtailment of 337 MW In case 2, the imbalance between power supply and demand raises the fCOI to 60.015 Hz. Note that the fCOI exceeds fnorm by a smaller amount than that of case 1. This is because the total power generated from the overall WPPs is smaller than case 1 due to the wind conditions. In order to balance the power supply and demand, 337 MW is required for power curtailment. To solve this problem, the proposed cooperative control framework is applied to determine the 20 WPPs operation. In general, the power system is operated by each area rather than operating the entire system as one large area. Therefore, the proposed framework is applied in each area to determine the operation of WPPs for this case study. However, since there are fewer WPPs in areas 1, 2, and 4, the operation of WPPs in these areas is considered simultaneously. Thus, in order to curtail 337 MW, each area is curtailed by 84.3 MW. As a result, the framework determines WPPs (WPP1 , WPP4 , and WPP5 ) to be operated by the curtailed control method (PCC method), which provides power curtailment. Moreover, WPP2 , WPP6 , WPP11 , and WPP16 are operated by the CCC method to balance the power supply and demand precisely for each area. Note that WPPs are not operated by the PCC method for areas 5 and 6 since WPPs (WPP11 and WPP16 ) operated by the CCC method can provide the required curtailment for each area. Finally, the remaining WPPs are operated by the SIC method to provide IR and compensate for the instant power decrement during power curtailment. As shown in Figure 11, fCOI is over 60 Hz during 0 s to 20 s due to a power imbalance of 337 MW. After determining the WPPs operation using the proposed cooperative control framework, WPPs are curtailed at 20 s to balance the power supply and demand, making fCOI recover to fnorm , which is 60 Hz. However, as shown in Figure 12e, an additional power are not operated by the PCC method for areas 5 and 6 since WPPs (WPP11 and WPP operated by the CCC method can provide the required curtailment for each area. Final the remaining WPPs are operated by the SIC method to provide IR and compensate f the instant power decrement during power curtailment. As shown in Figure 11, fCOI is over 60 Hz during 0 s to 20 s due to a12 power of 14 imbalan of 337 MW. After determining the WPPs operation using the proposed cooperative contr framework, WPPs are curtailed at 20 s to balance the power supply and demand, maki fCOI recover to fnorm, which is 60 Hz. However, as shown in Figure 12e, an additional pow decrement of 428 MW occurs during Ascurtailment. a result, a frequency dipaoccurs, decrement of 428 MWpower occurscurtailment. during power As a result, frequency dip o making fCOI decrease to 59.952 Hz before reaching 60 Hz. In order to solve this problem, to solve this pro curs, making fCOI decrease to 59.952 Hz before reaching 60 Hz. In order the proposed coordination controlcoordination framework additionally operates WPPs (WPP 3 , WPP 7, lem, the proposed control framework additionally operates WPPs (WP WPP8 , WPP9 , WPP , WPP , WPP , WPP , WPP , WPP , WPP , WPP , and WPP 17 18 19 17, WPP1820 , WPP9,13WPP10, 14WPP12, 15 WPP13, WPP 14, WPP 15, WPP , )WPP19, a WPP107, WPP812 by the SIC method as) by soon power curtailment other WPPs. As a other result,WPPs. As WPP20 theasSIC method as soon asoccurs powerfrom curtailment occurs from the frequency dip is increased to 59.98 Hz. Table 5 summarizes the operation of 20 WPPs result, the frequency dip is increased to 59.98 Hz. Table 5 summarizes the operation of during the power curtailment. WPPs during the power curtailment. Energies 2022, 15, 2630 Energies 2022, 15, x FOR PEER REVIEW 13 of 15 11. Results of center of inertia frequency for case 2. Figure 11. ResultsFigure of center of inertia frequency for case 2. Figure 12. Results of output power from WPPs for case 2. (a) WPP1, WPP4, WPP5, WPP6, WPP9 Figure 12. Results of output power from WPPs for case 2. (a) WPP1 , WPP4 , WPP5 , WPP6 , WPP9 , WPPWPP 20. (b) WPP2, WPP3, WPP7, WPP10, WPP12, WPP15, WPP18. (c) WPP8, WPP11, WPP14, WPP16. (d 20 . (b) WPP2 , WPP3 , WPP7 , WPP10 , WPP12 , WPP15 , WPP18 . (c) WPP8 , WPP11 , WPP14 , WPP16 . WPP(d) 13, WPP17, WPP19. (e) Total output power of WPPs operated by curtailed control method. (f WPP13 , WPP17 , WPP19 . (e) Total output power of WPPs operated by curtailed control method. Total power of WPPs operated (f)output Total output power of WPPs operatedby bySIC SIC method. method. In summary, it is clearly shown from cases 1 and 2 that a large amount of power curtailTable 5. Summary of WPPs operation and numerical results for case 2. ment causes instant power decrement during a switching process from the MPPT control method to the curtailed control method. a significant Control P0 Moreover, this ΔPcauses cur ΔPdecfrequency dip ΔPSIC WPP beforeNo. reaching fnorm . To solve this problem, the proposed cooperative control framework method (MW) (MW) (MW) (MW) determines WPP operation in three control methods, which are the PCC, CCC, and SIC WPP1 Therefore,PCC 50.6 13.2 methods. the proposed framework operates35.1 WPPs that could provide required - WPP2 WPP3 WPP4 CCC SIC PCC 122.9 89.6 55.8 49.2 38.7 54.9 14.6 9.5 - Energies 2022, 15, 2630 13 of 14 power curtailment for power balance while also providing IR to compensate for the instant power decrement. The results show that frequency dip during the power curtailment is significantly improved using the solution by the proposed framework. Table 5. Summary of WPPs operation and numerical results for case 2. WPP No. Control Method P0 (MW) ∆Pcur (MW) ∆Pdec (MW) ∆PSIC (MW) WPP1 PCC 50.6 35.1 13.2 - WPP2 CCC 122.9 49.2 54.9 - WPP3 SIC 89.6 - - 9.5 WPP4 PCC 55.8 38.7 14.6 - WPP5 PCC 33.8 23.7 8.8 - WPP6 CCC 46.0 21.9 18.9 - WPP7 SIC 90.0 - - 9.7 WPP8 SIC 215.9 - - 26.0 WPP9 SIC 15.6 - - 1.7 WPP10 SIC 96.7 - - 7.3 WPP11 CCC 395.8 84.3 180.3 - WPP12 SIC 61.1 - - 5.5 WPP13 SIC 664.0 - - 84.4 WPP14 SIC 347.9 - - 35.8 WPP15 SIC 68.2 - - 7.4 WPP16 CCC 287.7 84.3 137.2 - WPP17 SIC 607.2 - - 58.3 WPP18 SIC 67.3 - - 5.8 WPP19 SIC 713.8 - - 92.9 WPP20 SIC 13.5 - - 1.5 Total - 4043.3 337.2 427.9 345.8 5. Conclusions This paper proposed the new cooperative control framework between the curtailed control and virtual inertial control (VIC) methods to minimize the instant power decrement during the power curtailment and improve the frequency dip. To do so, this paper first analyzed the power loss that occurs in the process of switching from the maximum power point tracking control method to the curtailed control method, which caused a severe impact on frequency stability during the frequency recovery. In order to solve this problem, the proposed cooperative control framework determined the WPP operation in the proportional curtailment control (PCC) and constant curtailment control (CCC) methods to provide the required power curtailment. Then, it operated the rest of the WPPs by the stepwise inertial control (SIC) method to provide an inertial response with the consideration of the power balance. The effectiveness of the proposed coordination framework was verified with several case studies on the practical South Korea electric power system. The results show that the proposed coordination framework successfully determined WPP operation in the PCC, CCC, and SIC methods to provide the required power curtailment and compensate for the excessive power decrement. Therefore, it is expected that the proposed framework would provide a promising solution on power curtailment and enable the high penetration of WPPs to the power system. Energies 2022, 15, 2630 14 of 14 Author Contributions: The research was conducted in collaboration with all authors. S.L. wrote the paper; S.L. performed the simulations; S.-M.B. and J.-W.P. supervised the paper. All authors have read and agreed to the published version of the manuscript. Funding: This work was supported in part by the National Research Foundation of Korea (NRF) (grant number: 2020R1A3B2079407), the Ministry of Science and ICT (MSIT), Korea, and in part by Basic Science Research Program through the NRF funded by the Ministry of Education (grant number: 2020R1I1A3074996). Conflicts of Interest: The authors declare no conflict of interest. References 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. 17. 18. 19. 20. 21. Renewable Energy Statistics 2021. Available online: https://www.irena.org/publications/2021/Aug/Renewable-energystatistics-2021 (accessed on 5 October 2021). Eto, J.H.; Berkeley, L.; Undrill, J.; Mackin, P.; Daschmans, R.; Williams, B.; Haney, B.; Hunt, R.; Ellis, J.; Illian, H.; et al. Use of Frequency Response Metrics to Assess the Planning and Operating Requirements for Reliable Integration of Variable Renewable Generation; Lawrence Berkeley National Laboratory (LBNL): Berkeley, CA, USA, 2010. Kayikçi, M.; Milanovic, J.V. Dynamic Contribution of DFIG-Based Wind Plants to System Frequency Disturbances. IEEE Trans. Power Syst. 2009, 24, 859–867. [CrossRef] Vorobev, P.; Greenwood, D.M.; Bell, J.H.; Bialek, J.W.; Taylor, P.C.; Turitsyn, K. Deadbands, Droop, and Inertia Impact on Power System Frequency Distribution. IEEE Trans. Power Syst. 2019, 34, 3098–3108. [CrossRef] Kumar, G.V.; Sarojini, R.K.; Palanisamy, K.; Padmanaban, S.; Holm-Nielsen, J.B. Large Scale Renewable Energy Integration: Issues and Solutions. Energies 2019, 12, 1996. [CrossRef] Oyekale, J.; Petrollese, M.; Tola, V.; Cau, G. Impacts of Renewable Energy Resources on Effectiveness of Grid-Integrated Systems: Succinct Review of Current Challenges and Potential Solution Strategies. Energies 2020, 13, 4856. [CrossRef] Nguyen, H.T.; Member, S.; Yang, G.; Member, S.; Hejde, A. Combination of Synchronous Condenser and Synthetic Inertia for Frequency Stability Enhancement in Low Inertia Systems. IEEE Trans. Sustain. 2019, 10, 997–1005. [CrossRef] Yan, X.; Sun, X. Inertia and Droop Frequency Control Strategy of Doubly-Fed Induction Generator Based on Rotor Kinetic Energy and Supercapacitor. Energies 2020, 13, 3697. [CrossRef] Yang, D.; Li, J.; Zhang, X.; Hua, L. Frequency Support from a Variable-Speed Wind Turbine Generator Using Different Variable Droop Characteristics. Energies 2020, 13, 4477. [CrossRef] Cañas-Carretón, M.; Carrión, M. Generation Capacity Expansion Considering Reserve Provision by Wind Power Units. IEEE Trans. Power Syst. 2020, 35, 4564–4573. [CrossRef] Ullah, N.R.; Thiringer, T.; Karlsson, D. Temporary Primary Frequency Control Support by Variable Speed Wind Turbines—Potential and Applications. IEEE Trans. Power Syst. 2008, 23, 601–612. [CrossRef] Kang, M.; Muljadi, E.; Hur, K.; Kang, Y.C. Stable Adaptive Inertial Control of a Doubly-Fed Induction Generator. IEEE Trans. Smart Grid 2016, 7, 2971–2979. [CrossRef] Hu, J.; Sun, L.; Yuan, X.; Wang, S.; Chi, Y. Modeling of Type 3 Wind Turbines with df/dt Inertia Control for System Frequency Response Study. IEEE Trans. Power Syst. 2017, 32, 2799–2809. [CrossRef] Wang, Y.; Bayem, H.; Giralt-devant, M.; Silva, V.; Guillaud, X.; Francois, B. Methods for Assessing Available Wind Primary Power Reserve. IEEE Trans. Sustain. Energy 2015, 6, 272–280. [CrossRef] DIgSILENT. DIgSILENT PowerFactory 2018 User Manual; DIgSILENT: Gomaringen, Germany, 2018. Deng, J.; Wang, J.; Li, S.; Zhang, H.; Peng, S.; Wang, T. Adaptive Damping Design of PMSG Integrated Power System with Virtual Synchronous Generator Control. Energies 2020, 13, 2037. [CrossRef] Zhang, X.L.; Huang, C.; Hao, S.P.; Chen, F.; Zhai, J.J. An Improved Adaptive-Torque-Gain MPPT Control for Direct-Driven PMSG Wind Turbines Considering Wind Farm Turbulences. Energies 2016, 9, 977. [CrossRef] Kang, M.; Kim, K.; Muljadi, E.; Park, J.W.; Kang, Y.C. Frequency Control Support of a Doubly-Fed Induction Generator Based on the Torque Limit. IEEE Trans. Power Syst. 2016, 31, 4575–4583. [CrossRef] Yang, D.; Kim, J.; Kang, Y.C.; Muljadi, E.; Zhang, N.; Hong, J.; Song, S.; Zheng, T. Temporary Frequency Support of a DFIG for High Wind Power Penetration. IEEE Trans. Power Syst. 2018, 33, 3428–3437. [CrossRef] Nam, H. Impact of Nuclear Phase-Out Policy and Energy Balance in 2029 Based on the 8th Basic Plan for Long-Term Electricity Supply and Demand in South Korea. Renew. Sustain. Energy Rev. 2020, 122, 109723. [CrossRef] Mujcinagic, A.; Kusljugic, M.; Nukic, E. Wind Inertial Response Based on the Center of Inertia Frequency of a Control Area. Energies 2020, 13, 6177. [CrossRef]