GUIDED BY:
Dr. R RAMAKRISHNAN
PRESENTED BY:
SHUBHAM GUPTA
AVINASH PRAHLAD JOSHI
ABHIJATH H B
BRIJ BANDHU SINGH
PRAYAG S PATIL
YATAM HARSHIT
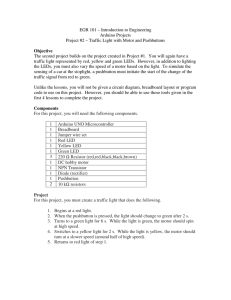
To control the displacement of the hydraulic
motor in Electro hydraulic systems
i.
ii.
To control the DC motor which is controlling the
pump.
Here we control two parameters
Displacement in electro-hydraulic motor.
Torque.
Get inputs from hydraulic motor with encoder.
Develop algorithms or programs for the given
systems.
Working with arduino
Input to
control
unit
Output from
motor
CONTROLLIN
G
UNIT
MOTOR
PUMP
CONTROL
VALVE
HYDRAULIC
MOTOR
Output from Hydraulic motor which will
be input to control unit
LOAD
PREREQUISITE SKILL
Knowledge different domains
Information Literacy
Multi-disciplinary exposure
Strong decision-making skills
Know computer software and test procedures
WHAT
WE
NEED ?
Knowledge of basic electronic
concepts and devices
Experiment with hardware.
Just Learn to Code
CONTROL DEVICE
A device which may be situated on the external of the system
or is an element of the system itself.
It functions as a control of a specific process.
HARDWARE CONSIDERED FOR OUR
SYSTEM
1. Arduino UNO / Arduino mega
2560
2. My RIO Student Embedded Device
ARDUINO MEGA 2560
Arduino is an open-source electronics platform based on
easy-to-use hardware and software. It's intended for anyone
making interactive projects.
ARDUINO SOFTWARE
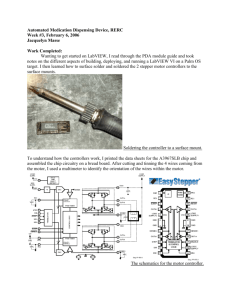
myRIO-1900
My RIO Student
Embedded Device
The required software for programming my RIO includes:
LabVIEW
LabVIEW my RIO Toolkit
The National Instruments myRIO is a portable
reconfigurable I/O (RIO) device that students
can use to design control, robotics, and
mechatronics systems.
Version of myRIO that is used here is 1900.
NI myRIO-1900 provides analog input (AI),
analog output (AO), digital input and output
(DIO), audio, and power output in a compact
embedded device.
Basically consists of two parts
Processor
FPGA
Basically NI myRIO 1900 has two types of
Ports
MXP (MyRio Expansion Port)
MSP (Mini System Port)
It is a collection of two connectors A and B.
NI myRIO-1900 Expansion Port (MXP)
connectors A and B carry identical sets of
signals. The signals are distinguished in
software by the connector name, as in
Connector A/DIO1 and Connector B/DIO1.
It contains a single connector namely
connector C
Here some pins carry secondary functions as
well as primary functions.
Accelerometer
NI myRIO-1900 contains a three-axis
accelerometer.
• UART
myRIO-1900 has one UART receive input line and one
UART transmit output line on each MXP connector.
Power LED: It is lit while the NI myRIO-1900
is powered on.
Status LED: The Status LED is off during
normal operation.
Processor
Processor type: Xilinx Z-7010
Processor Core: 2
ROM: 512MB
RAM(DDR3): 256MB
Overvoltage Protection: 16v
MXP connectors
Nominal range: 0 – 5v
Bandwidth: 300KHz
Current Drive: 3mA
MSP Connectors
Nominal range: 10v
Bandwidth: 20KHz
Current Drive: 2mA
NI myRIO-1900 requires a power supply
connected to the power connector.
Power supply voltage range : 6 to 16 VDC
Maximum power consumption : 14W
Typical idle power consumption: 2.6 W
LabVIEW is the acronym for:
Laboratory Virtual Instrument Engineering Workbench.
It is a Graphical-based programming language that uses
icons instead of lines of text to create applications.
VI (virtual instrument) is the basic LabVIEW element.
Programming languages such as C, C++,BASIC use
functions and subroutines LabVIEW uses VI.
Lab VIEW contains a set of VIs and functions for
acquiring , analyzing , displaying and storing data.
It includes analysis functions for differential
equations, optimization, curve fitting, calculus,
linear algebra, statistics and so on.
It also includes the tools to present the data on
the computers: Charts, Graphs, Tables, Gauges,
Meters,Tanks,3D controls, 3D Graphs, Picture
Control etc.
VI
Function
Drag-drop units
Commands
Block diagram
Command window
Front panel
User interface
math-script
math.stdio
Graphical User Interface
Easy to use and Learn
Drag and Drop built-in functions
Flexibility and scalability
Visualization capabilities
Simple application distribution
Connectivity and Instrument control
To Test, Control and Design applications making
accurate analog and digital measurements.
Using VI, can also control external hardware
devices from desktop computer and for
displaying unit.
Front Panel
• Controls = Inputs
• Indicators = Outputs
Block Diagram
• Accompanying “program” for front panel
• Components “wired” together
The front panel is the user interface of the VI. You
build the front panel with controls and indicators,
which are the interactive input and output terminals of
the VI, respectively.
Controls are knobs, push buttons, dials, and other input
devices. Indicators are graphs, LEDs, and other
displays.
Controls simulate instrument input devices and supply
data to the block diagram of the VI. Indicators simulate
instrument output devices and display data the block
diagram acquires or generates.
Every control or indicator on the front panel has a
corresponding terminal on the block diagram.
Wires connect each of the nodes on the block diagram,
including control and indicator terminals, functions and
structures.
Run Button
Continuous Run
Button
Abort Execution
Pause/Continue
Button
Used to operate and modify front panel and
block diagram objects
Operating Tool
Positioning/Resizing Tool
Labeling Tool
Wiring Tool
Shortcut Menu Tool
Automatic Selection Tool
Structure
For Loop
While Loop
While Loops
◦ Have Iteration
Terminal
◦ Always Run at least
Once
◦ Run According to
Conditional Terminal
Selected from the Graph palette of Controls menu
Controls>>All Controls>>Graphs
Right-Click on the Graph
and choose Properties
to Interactively Customize
Block diagram and Front panel.
As soon as we connect the
USB cable, the myRio
will start installing the
driver on our computer. It
will take some time.
Once the driver is
installed, then a pop up
window will open up as
shown in below figure:
If our device is listed as mine
then we need to press
the Next Button.
When we press the Next
button a new window will
pop up as shown in
figure:
Now finally we have reached
the control window, from this
window we are gonna control
all the four LEDs labelled as
LED0, LE1, LED2 and LED 3
and also gonna get notification
for the button pressed and will
also get values for X, Y and Z
axis.
Block diagram
Front panel
Or PLANT
One type of control system in which the output has no influence or effect
on the control action of the input signal is called an Open-loop system.
A Closed-loop Control System, also known as a feedback control system is a
control system which uses the concept of an open loop system as its forward
path but has one or more feedback loops (hence its name) or paths between
its output and its input.
Feedback
Control
Plant
Feedback
Throttle
Auto-engine
Air temp
Steering
direction
Room temp
Wheel speed
Thermostat
temp
Distance
from path
Voltage
Car
Electric
motor
Fan speed
CPU temp
Fan speed
CPU temp
sensor
Error refers to the difference between the value which has been
computed and the correct value.
This is exactly what the controller does.
1.
2.
3.
A
proportional–integral–derivative
controller (PID controller) is a control
loop feedback mechanism. As the name
suggests, PID algorithm consists of
three basic coefficients:Proportional
Integral
Derivative
The entire idea of this algorithm revolves
around manipulating the error. The error as is
evident is the difference between the Process
Variable and the Setpoint.
ERROR = PV – SP
Consider the input error variable,
e(t):
◦ Let p(t) = Kp*e(t) {p proportional to e }
◦ Let i(t) = Ki*∫e(t)dt {i integral of e }
◦ Let d(t) = Kd* de(t)/dt {d derivative of
e}
AND let V(t) = p(t) + i(t) + d(t)
Then in Laplace Domain:
V(s) = [Kp + 1/s Ki + s Kd] E(s)
Proportional
P
Integral
I
Differential
D
• P depends on
the present error.
• I on the accumulation
of past errors.
• D is a prediction
of future errors, based on
current rate of change.
Factors to be considered for system
Encoder signal
PID gains
Pulse Wave Modulation signal(PWM)
H-bridge
ISSUES TO ADDRESS
Create a module to convert encoder signal into a
compatible input to my Rio
Create a module to convert the PWM signal output
into a compatible input to H-bridge
Since 15V ports of NI-MYRIO are less (i.e. +/15port only available), it may or may not be
sufficient for a DC motor(depends on the motor)