Control Systems Assignment: Plant Identification & Controller Design
advertisement

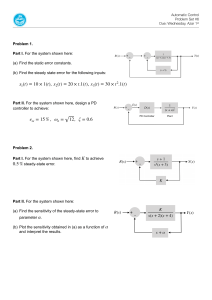
MARKS EEE350 CONTROL SYSTEMS 2022-2023 ASSIGNMENT 1 Group Name ID Signature 71 MUHAMMAD AKIF AIMAN BIN MOHD ROSLI 150152 AKkifaiman NUR ALIA HANIF BINTI MOHAMMAD 153081 ALIAHANIF READ the following rules and instructions carefully before you sign: I. II. III. IV. Organize your work, in a reasonably neat and coherent way. Work scattered all over the page without a clear ordering will receive very little credit. Solutions may be typed or handwritten as long as they are neat and readable. Unreadable answers will not be marked. Mysterious or unsupported answers will not receive full credit. A correct answer, unsupported by calculations, explanation, or algebraic work will receive no credit; an incorrect answer supported by substantially correct calculations and explanations might still receive partial credit. Penalties for Plagiarism: Those who are caught to copy or allow others to copy part of or the entire work will have to 'share' their marks for this assignment (i.e. if there are 'n' reports that are similar, the marks will also be divided by 'n'). Date of submission: 6 January 2023 This assignment contains two main tasks: Task 1 and Task 2. You need to submit a report which includes: i. Cover page – completed and signed (the rules and penalties for plagiarism must be read and understood). ii. This page. iii. Question page (next page). iv. Solutions to Tasks 1 and 2. v. Discussions and Conclusions Marks will be given based on the following criteria: Criteria Task 1 Task 2 Incorrect <---> Correct (0 to 5) Weight Total Max Methodology 3 15 Solutions via calculations 3 15 Relevant figures 3 15 Derivations of solutions 3 15 Validations 3 15 Relevant figures 3 15 Discussions and Conclusions 2 10 TOTAL 100 Marks deduction for plagiarism. Marks deduction for not following the instructions. Task 1: Download the unknown Simulink model (i.e. plant) and estimate its transfer function based on its timedomain response. Refer to the characteristics of first order and second order systems. Tips: 1. Inject a step input and record the response. Repeat with different magnitudes. 2. If you think it is a first order stable system, you can estimate the parameters based on the rise time, time constant, and steady-state error or gain. 3. If you think it is a second order stable system, you can estimate the parameters based on the rise time, peak time, peak overshoot, and steady-state error or gain. 4. If you think it is an unstable system, you can implement a feedback with a proportional controller. Then, estimate the parameters based on the characteristics of a first order or second order systems as stated in (2) and (3) above. Figure 1: Closed-loop system Task 2: Referring to Figure 1, let 𝐺(𝑠) be the identified plant based on Task 1. Design the controller 𝐶(𝑠) such that all the requirements below can be met at once: i. ii. iii. The closed-loop system is stable and the steady-state error is less than 0.1%. The peak overshoot, 𝑀𝑝 , for the step response (i.e. 𝑅(𝑠) = 1/𝑠) is less than 10%. The settling time, 𝜏𝑠 , is less than 2s. You may use the approximations of a second order system below: 𝜁𝜋 − √1−𝜁2 • 𝑀𝑝 = 𝑒 • 1.8 𝜏𝑟 ≈ 𝜔 𝑛 • 𝜏𝑝 ≈ • 𝜏𝑠 ≈ 𝜁𝜔 (rise time) 𝜋 𝜔𝑛 √1−𝜁 2 4 𝑛 (peak overshoot) (peak time) (settling time) NB: Not all of the approximations above are relevant to your problem. Using Simulink, show the “relevant” time-domain responses for the closed-loop system in Figure 1 with your designed controller, i.e. prove that all the design requirements (i.e. (i), (ii) and (iii)) have been achieved.