Contents
15 Multiple Integrals
15.1 Integral of a function of single variable . . . . . . . . . . . . .
15.2 Integral of a function of two variables . . . . . . . . . . . . . .
15.2.1 Evaluation of double integrals (Fubini’s theorems) . .
15.2.2 Method to find limits of x and y for a given region . .
15.2.3 Change of variables in double integrals . . . . . . . . .
15.2.4 Change of order in double integrals . . . . . . . . . . . .
15.3 Integral of a function of three variables . . . . . . . . . . . . .
15.3.1 Evaluation of triple integrals . . . . . . . . . . . . . . . .
15.3.2 Method to find limits of x, y and z for a given region
15.3.3 Change of variables in triple integrals . . . . . . . . . .
15.4 Summary and applications of multiple integrals . . . . . . . .
15.4.1 Mass, centre of gravity and moments of intertia . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
3
3
4
7
10
11
11
12
12
17
17
Note: Comments/suggestions on these lecture notes are welcome on the e-mail: sukuyd@gmail.com to
Dr. Suresh Kumar.
1
Chapter 15
Multiple Integrals
15.1
Integral of a function of single variable
Let f (x) be a function defined in an interval [a, b]. Divide the interval [a, b] into subintervals by choosing
points between a and b. Let there be n subintervals of [a, b] of lengths δxi (i = 1, 2, ...., n) such that
δxi → 0 as n → ∞. Let xi be a point in the ith subinterval. Then the limit
lim
n→∞
n
X
f (xi )δxi ,
i=1
if exists, defines the integral of f (x) over the interval [a, b], and is written as
Z
n
X
b
f (x)dx = lim
n→∞
a
f (xi )δxi .
i=1
Geometry: Suppose the curve y = f (x) lies above the x-axis from x = a to x = b. Then f (xi )δxi is the
area of the rectangle of length f (xi ) and breadth δxi , erected over the ith subinterval interval of [a, b]. So
n
X
f (xi )δxi gives the approximate area under the curve y = f (x) above the x-axis from x = a to x = b.
i=1
It implies that the limit lim
n→∞
n
X
Z
i=1
b
f (x)dx gives the area under the curve y = f (x) above
f (xi )δxi or
a
the x-axis from x = a to x = b.
In particular, if f (x) = 1, then
Z
b
dx = lim
a
n→∞
n
X
δxi = b − a,
i=1
gives the area of the rectangle bounded by the lines f (x) = 1, x-axis, x = a and x = b. In magnitude, it
is the length of the interval [a, b].
Rb
Z b
f (x)dx
1
Average value of f (x) over [a, b]: It is defined as a R b
=
f (x)dx.
b−a a
dx
a
2
15.2
Integral of a function of two variables
Let f (x, y) be a function defined in a region R in the xy-plane. Divide the region R into subregions by
choosing lines parallel to the coordinate axes. Let there be n complete rectangles inside R of dimensions
δxi along x-axis and δyi along y-axis, where i = 1, 2, ...., n, such that δxi → 0 and δyi → 0 as n → ∞.
Let (xi , yi ) be a point in the ith rectangle. Then the limit
lim
n
X
n→∞
f (xi , yi )δxi δyi ,
i=1
if exists, defines the integral of f (x, y) over the region R, and is written as
ZZ
n
X
f (x, y)dxdy = lim
f (xi , yi )δxi δyi .
n→∞
R
i=1
Geometry: Suppose the surface z = f (x, y) lies above the xy-plane with its region of projection R in the
xy-plane. Then f (xi , yi )δxi δyi is the volume of the cuboid of height f (xi , yi ), length δxi and breadth δyi ,
n
X
erected over the ith rectangle of the region R. So
f (xi , yi )δxi δyi gives the approximate volume under
i=1
n
X
the surface z = f (x, y) above the region R of xy-plane. It implies that the limit lim
f (xi , yi )δxi δyi
n→∞
i=1
ZZ
or
f (x, y)dxdy gives the volume under the surface z = f (x, y) above the region R of xy-plane.
R
In particular, if f (x, y) = 1, then
ZZ
n
X
dxdy = lim
δxi δyi
n→∞
R
i=1
gives the volume under the plane f (x, y) = 1 and above the region R of xy-plane. In magnitude, it is
equal to the area of the region R.
RR
ZZ
f (x, y)dxdy
1
=
f (x, y)dxdy.
Average value of f (x, y) over R: It is defined as RRR
Area of R
R
R dxdy
15.2.1
Evaluation of double integrals (Fubini’s theorems)
• Suppose that f (x, y) is a continuous function over the rectangular region
R = {(x, y) : a ≤ x ≤ b, c ≤ y ≤ d} ,
Z b Z
ZZ
bounded by the four lines x = a, x = b, y = c and y = d. Then
Z d Z b
and
f (x, y)dx dy all exist and are equal, that is,
c
f (x, y)dxdy,
R
a
d
Z b Z
ZZ
f (x, y)dxdy =
R
a
Z
f (x, y)dy dx =
c
c
d Z b
f (x, y)dx dy.
a
• If f (x, y) is a continuous function over the non-rectangular region
R = {(x, y) : a ≤ x ≤ b, ϕ(x) ≤ y ≤ ψ(x)} ,
bounded by the lines x = a, x = b and the curves y = ϕ(x) and y = ψ(x), then
#
ZZ
Z b "Z ψ(x)
f (x, y)dxdy =
f (x, y)dy dx.
R
a
ϕ(x)
3
a
c
d
f (x, y)dy dx
• If f (x, y) is a continuous function over the non-rectangular region
R = {(x, y) : c ≤ y ≤ d, ϕ(y) ≤ x ≤ ψ(y)} ,
bounded by the lines y = c, y = d and the curves x = ϕ(y) and x = ψ(y), then
#
ZZ
Z "Z
d
ψ(y)
f (x, y)dxdy =
R
Z
1Z 2
Ex. Solve
0
f (x, y)dx dy.
c
ϕ(y)
(1 + xy 2 )dxdy.
0
Sol. We have
Z
Z 1Z 2
2
(1 + xy )dxdy =
0
1 Z 2
Z
0
x=2
x2 y 2
x+
dy
2 x=0
2 + 2y 2 dy
1
=
0
Z
(1 + xy )dx dy
0
0
2
1
=
0
2y 3
2y +
3
8
3
=
=
Z
1 Z x3
Ex. Solve
0
Sol. Ans.
15.2.2
y=1
y=0
x(x2 + y 2 )dydx.
0
40
231
Method to find limits of x and y for a given region
In some problems, the region of integration R of a function f (x, y) is given without specifying the limits
for x and y. In such problems, we first sketch the region R in xy-plane, and then find the limits of x and
y by considering an arbitrary line either parallel to x-axis or parallel to the y-axis passing through the
region R. Suppose we choose a line parallel to x-axis passing through the region R. Then for the lower
limit of x, we observe the boundary curve, say x = ϕ(y), of the region R where the line enters the region
R from the left. For the upper limit of x, we observe the boundary curve, say x = ψ(y), of the region R
where the line leaves the region R. The lower and upper limits of y, say y = c and y = d, are given by
the values of y at the bottommost and topmost points of the region R, respectively. Then we have
#
ZZ
Z "Z
d
ψ(y)
f (x, y)dxdy =
R
f (x, y)dx dy.
c
ϕ(y)
Likewise, if we choose an arbitrary line parallel to y-axis, and passing through the region R, then boundary
curve of the region R through which the line enters the region R from lower side gives the lower limit of
y, say y = ϕ(x). The boundary curve of R where the line leaves the region R gives the upper limit of y,
say y = ψ(x). The lower and upper limits of x, say x = a and x = b, are given by the values of x at the
leftmost and rightmost points of the region R, respectively. Then we have
#
ZZ
Z "Z
b
ψ(x)
f (x, y)dxdy =
R
f (x, y)dy dx.
a
ϕ(x)
4
ZZ
xydxdy, where R = {(x, y) : x + y ≤ 1, x ≥ 0, y ≥ 0}.
Ex. Solve
R
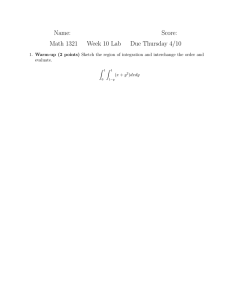
Sol. The given region R of integration is the triangular region in the first quadrant of the xy-plane
bounded by the lines x = 0, y = 0 and x + y = 1 as shown in Figure 1.
1.0
x+y=1
x=0
x=1-y
0.5
y=0
0.5
1.0
Figure 15.1:
Note that the line x + y = 1 intersects x-axis in the point (1, 0), and y-axis in the point (0, 1). To find
the limits of x and y for the given region R, let us choose a line parallel to x-axis (the red line in Figure
1) passing through the region R. We observe that the line enters the region R from the left through the
side of the triangular region on y-axis, that is, x = 0, and leaves the region at its side given by x + y = 1
or x = 1 − y. So lower and upper limits of x are x = 0 and x = 1 − y, respectively. Now bottommost
point(s) of the region R lies on its side on x-axis, where y = 0, and the uppermost point is (0, 1), where
y = 1. So the given region of integration may be written as R = {(x, y) : 0 ≤ x ≤ 1 − y, 0 ≤ y ≤ 1}. It
follows that
ZZ
Z 1 Z 1−y
1
xydxdy =
xydx dy = .
24
R
0
0
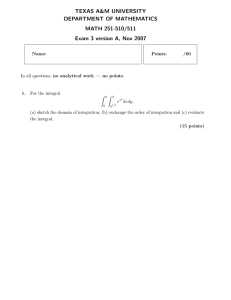
1.0
x+y=1
y=1-x
0.5
x=0
0.5
y=0
1.0
Figure 15.2:
We can also solve the given problem by choosing a line parallel to y-axis (the red line in Figure 2)
passing through the region R. In this case, we observe that the line from lower side enters the region R
through the side of the triangular region on x-axis, that is, y = 0, and leaves the region at its side given by
x + y = 1 or y = 1 − x. So lower and upper limits of y are y = 0 and y = 1 − x, respectively. Now leftmost
point(s) of the region R lies on its side on y-axis, where x = 0, and the rightmost point is (1, 0), where
x = 1. So the given region of integration may be written as R = {(x, y) : 0 ≤ x ≤ 1, 0 ≤ y ≤ 1 − x}. It
5
follows that
Z
ZZ
xydxdy =
1 Z 1−x
xydy dx =
0
R
0
1
.
24
Note that we get the same answer in both cases. So we can choose the arbitrary line parallel to either of
the axes to decide the limits of x and y.
The case of polar curve
If the region R is enclosed by a polar curve r = f (θ), then to decide the limits of r we choose a line
through the pole, and then find the limits of r accordingly as where the line enters (starting from pole)
and leaves the given region R. Limits of θ can be found according to the variation of θ for the given
region R. The
Z Z following example illustrates the case of polar curve.
Ex. Solve
r sin θdrdθ, where R is the region that lies inside the cardioid r = 1 + cos θ and outside
R
the circle r = 1.
Sol. The given region of integration is the shaded region as shown in Figure 3.
Figure 15.3:
Consider a line L through the pole and passing through the given region. We observe that the line
enters the given region at the boundary of the circle r = 1 and leaves at the boundary of the cardioid
r = 1 + cos θ. Also, for the given region, θ varies from θ = − π2 to θ = π2 . So we can write the given region
as
R = {(r, θ) : 1 ≤ r ≤ 1 + cos θ, −
So we have
ZZ
Z
r sin θdrdθ =
R
π
2
− π2
Z
1+cos θ
π
π
≤ θ ≤ }.
2
2
r sin θdr dθ = 0
1
6
(Check?).
15.2.3
Change of variables in double integrals
Let a function f (x, y) be integrable over a region R in the xy-plane. Suppose R is mapped onto a region
R′ in uv-plane by means of the transformations
x = x(u, v),
y = y(u, v),
where h(u, v) and g(u, v) possess continuous partial derivatives in R′ , and the Jacobian
J=
∂x
∂u
∂y
∂u
∂(x, y)
=
∂(u, v)
∂x
∂v
∂y
∂v
Then we have
ZZ
ZZ
f (x, y)dxdy =
̸= 0,
in R′ .
f (x(u, v), y(u, v))|J|dudv.
R′
R
Notice that x and y are replaced by x(u, v) and y(u, v), respectively in f while dxdy is replaced by |J|dudv.
Why Jacobian arises?
Now let us see how the Jacobian arises when we do change of variables via the transformations,
x = x(u, v),
y = y(u, v).
Assuming x(u, v) and y(u, v) as differentiable functions of u, v, we have
∆x =
∂x
∂x
∆u +
∆v + ϵ1 ∆u + ϵ2 ∆v,
∂u
∂v
∂y
∂y
∆u +
∆v + ϵ3 ∆u + ϵ4 ∆v,
∂u
∂v
where ϵ1 , ϵ2 , ϵ3 , ϵ4 are all some functions of ∆u and ∆v. These functions tend to 0 in the limit (∆u, ∆v) →
(0, 0) (see the definition of differentiability in Chapter 14). Choosing ∆u, ∆v too small that all the terms
carrying ϵ functions are neglected, and we have
∆y =
∆x =
∂x
∂x
∆u +
∆v,
∂u
∂v
∂y
∂y
∆u +
∆v.
∂u
∂v
Solving these equations for ∆u and ∆v, we find
∆y =
∆u =
∂y
∂v ∆x −
∂x ∂y
∂u ∂v −
∂x
∂v ∆y
∂y ∂x
∂u ∂v
1
=
J
∂y
∂x
∆x −
∆y ,
∂v
∂v
∆v =
∂x
∂u ∆y
∂x ∂y
∂u ∂v
−
−
∂y
∂u ∆x
∂y ∂x
∂u ∂v
1
=
J
∂x
∂y
∆y −
∆x .
∂u
∂u
Multiplying these expressions of ∆u and ∆v, and neglecting second order terms in ∆x and ∆y, we obtain
∆u∆v =
1
1
(|J|∆x∆y) =
∆x∆y.
2
J
|J|
Note that the absolute value of the Jacobian is considered in order to keep the area elements positive.
Finally, in the limit of the infinitesimals, we have dxdy = |J|dudv. This completes the proof.
7
Geometry of Jacobian
Suppose the transformations
x = x(u, v),
y = y(u, v).
transform a region R of integration in xy-plane to a region R′ in uv-plane. Let ABCD be some elementary
rectangle inside R′ with vertices A(u, v), B(u + ∆u, v), C(u + ∆u, v + ∆v), D(u, v + ∆v), and let these
vertices correspond to the points P (x(u, v), y(u, v)), Q(x(u + ∆u, v), y(u + ∆u, v)), R(x(u + ∆u, v +
∆v), y(u + ∆u, v + ∆v)), S(x(u, v + ∆v), y(u, v + ∆v)) in the xy-plane via the above transformations.
Thus, the curves P Q, QR, RS and SP in xy-plane correspond to the sides AB, BC, CD and DA.
The area of the region bounded by the curves P Q, QR, RS and SP in xy-plane, denoted by ∆x∆y, is
approximately given by the area of the parallelogram P QRS. We have
−−→
∂x
∂y
P Q =< x(u + ∆u, v) − x(u, v), y(u + ∆u, v) − y(u, v) > ≈ <
∆u,
∆u >
∂u
∂u
−→
∂x
∂y
P R =< x(u, v + ∆v) − x(u, v), y(u, v + ∆v) − y(u, v) > ≈ <
∆v, ∆v >
∂v
∂v
So the area of the parallelogram P QRS is given by
−−→ −→
∂x ∂y ∂y ∂x
∆x∆y = |P Q × P R| ≈
−
∆u∆v.
∂u ∂v ∂u ∂v
Thus, in the limit of the infinitesimals, we have dxdy = |J|dudv.
Jacobian for polar transformations
If we choose the polar transformations given by x = r cos θ and y = r sin θ, then
∂x
∂x
∂(x, y)
cos θ −r sin θ
∂r
∂θ
= ∂y
= r.
∂y =
sin θ r cos θ
∂(r, θ)
∂r
∂θ
ZZ
Ex. Evaluate
sin[π(x2 + y 2 )]dxdy, where R = {(x, y) : x2 + y 2 ≤ 1}.
J=
R
Sol. Using x = r cos θ, y = r sin θ, the given circular region R = {(x, y) : x2 + y 2 ≤ 1} transforms to
R′ = {(r, θ) : 0 ≤ r ≤ 1, 0 ≤ θ ≤ 2π} while dxdy = |J|drdθ = rdrdθ. So we have
ZZ
ZZ
Z 2π Z 1
2
2
2
2
sin[π(x + y )]dxdy =
sin(πr )rdrdθ =
sin(πr )rdr dθ = 2.
R′
R
0
0
Note: Is change of variables essential to solve the above example? This can be realized if you try to solve
it without using the change of variables. Let me know if you are able to solve it! Good luck!
Also note that the area of a closed and bounded region R in the polar coordinate plane is given by
ZZ
A=
rdrdθ
R
Z
Ex. Evaluate
0
1 Z 1−x √
x + y(y − 2x)2 dydx.
0
Sol. First we sketch the given region and identify its boundaries. The given region is bounded by x = 0,
x = 1, y = 0 and y = 1 − x, as shown by the region say R in Figure 15.4. It has three boundaries given
by the lines x = 0, y = 0 and y = 1 − x.
Now the integrand suggests the transformation
u = x + y,
v = y − 2x,
8
Figure 15.4: Given region R with the boundaries x = 0, y = 0 and y = 1 − x
which can be simplified to get
u v
2u v
− , y=
+ .
3 3
3
3
Therefore, the boundaries x = 0, y = 0 and y = 1 − x of the given region R transform to v = u, v = −2u
and u = 1 respectively. The transformed region G is shown in Figure 15.5.
x=
Figure 15.5: The transformed region G with the boundaries v = u, v = −2u and u = 1
Also, Jacobian of the transformations is
J=
∂x
∂v
∂y
∂v
∂x
∂u
∂y
∂u
It follows that
Z 1 Z 1−x
0
√
=
1
3
2
3
−1
3
1
3
1
= .
3
x + y(y − 2x)2 dydx =
0
Z
u=1 Z v=u
u=0
2Z y
2
u1/2 v 2 |J|dvdu = .
9
v=−2u
r
y √xy
e
dxdy.
x
1
1/y
Sol. First we sketch the given region and identify its boundaries. The given region is bounded by x = 1/y,
x = y, y = 1 and y = 2, as shown by the region say R in Figure 15.6. It has three boundaries xy = 1,
y = x and y = 2.
Now the integrand suggests the transformation
r
y
√
u = xy, v =
,
x
Z
Ex. Evaluate
which can be simplified to get
u
x = , y = uv.
v
9
Figure 15.6: Given region R with the boundaries xy = 1, y = x and y = 2
Therefore, the boundaries xy = 1, y = x and y = 2 of the given region R transform to u = 1, v = 1 and
uv = 2 respectively. The transformed region G is shown in Figure 15.5.
Figure 15.7: The transformed region G with the boundaries u = 1, v = 1 and uv = 2
Also, Jacobian of the transformations is
J=
∂x
∂u
∂y
∂u
∂x
∂v
∂y
∂v
It follows that
Z 2Z y r
1
15.2.4
1/y
=
1
v
−v
u2
v
u
y √xy
e
dxdy =
x
=
2u
.
v
Z
u=2 Z v=2/u
u=1
veu |J|dvdu = 2e(e − 2).
v=1
Change of order in double integrals
If the region of integration is non-rectangular, and atleast one limit of x is variable, then for changing
the order of integration, choose a line parallel to y-axis through the given region, and find the limits of x
and y accordingly. In case, atleast one limit of y is variable, choose the line parallel to x-axis through the
given region, and find the limits of x and y accordingly.
Z ∞ Z ∞ −y
e
dydx, and hence evaluate it.
Ex. Change the order of integration in
y
0
x
Sol.
Z ∞ Z ∞ −y
Z ∞ Z y −y
e
e
dydx =
dxdy = 1.
y
y
0
x
0
0
Note: Is change of order of integration essential to solve the above example? This can be realized if you
try to solve it without using the change of order. Let me know if you are able to solve it! Good luck!
10
Z
1 Z 2−x
xy dydx, and hence evaluate it.
Ex. Change the order of integration in
x2
0
Sol.
Z
1 Z 2−x
Z
1Z
√
y
xy dydx =
x2
0
15.3
2 Z 2−y
Z
xy dxdy =
xy dxdy +
0
1
0
0
1
5
3
+
= .
6 24
8
Integral of a function of three variables
Let f (x, y, z) be a function defined in a volumetric region V in the xyz-space. Divide the region V into
subregions by choosing planes parallel to the coordinate planes. Let there be n complete cuboids inside
V of dimensions δxi along x-axis, δyi along y-axis and δzi along z-axis, where i = 1, 2, ...., n, such that
δxi → 0, δyi → 0 and δzi → 0 as n → ∞. Let (xi , yi , zi ) be a point in the ith cuboid. Then the limit
n
X
lim
n→∞
f (xi , yi , zi )δxi δyi δzi ,
i=1
if exists, defines the integral of f (x, y, z) over the region V , and is written as
ZZZ
n
X
f (x, y, z)dxdydz = lim
f (xi , yi , zi )δxi δyi δzi .
n→∞
V
i=1
Geometry:
Z Z Z Since we can not plot the graph of f (x, y, z) geometrically, so we can not interpret the geometry of
f (x, y, z)dxdydz, in general. However, in the particular case f (x, y, z) = 1, the expression
V
ZZZ
dxdydz = lim
n→∞
V
n
X
δxi δyi δzi ,
i=1
gives the volume of the region V , in magnitude.
Average value of f (x, y, z) over V : It is defined as
RRR
ZZZ
f (x, y, z)dxdydz
1
VRRR
f (x, y, z)dxdydz.
=
Volume of V
V
V dxdydz
15.3.1
Evaluation of triple integrals
• Suppose that f (x, y, z) is a continuous function in the cuboidal region
V = {(x, y, z) : a ≤ x ≤ b, c ≤ y ≤ d, e ≤ z ≤ f } ,
bounded by the six planes x = a, x = b, y = c, y = d, z = e and z = f . Then
ZZZ
Z f Z d Z b
f (x, y, z)dxdydz =
f (x, y, z)dx dy dz.
V
e
c
a
• If f (x, y, z) is a continuous function in the non-cuboidal region
V = {(x, y, z) : a ≤ x ≤ b, ϕ(x) ≤ y ≤ ψ(x), g(x, y) ≤ z ≤ h(x, y)} ,
bounded by the planes x = a, x = b, the curves y = ϕ(x) and y = ψ(x), and the surfaces z = g(x, y),
z = h(x, y), then
"Z
# #
ZZZ
Z "Z
b
ψ(x)
h(x,y)
f (x, y, z)dxdydz =
V
f (x, y, z)dz dy dx.
a
ϕ(x)
g(x,y)
11
Z
1 Z x Z x+y
Ex. Solve
0
Sol. We find
Z 1Z xZ
0
x+y
e
0
15.3.2
0
ex+y+z dzdydx.
0
x+y+z
Z
1 Z x Z x+y
e
dzdydx =
0
0
x+y+z
0
0
1
3
3
dz dy dx = e4 − e2 + e − .
8
4
8
Method to find limits of x, y and z for a given region
In some problems, the region of integration V of a function f (x, y, z) is given without specifying the
limits for x, y and z. In such problems, we first sketch the region V in xyz-space. To find the limits of
z, we choose a line parallel to z-axis through the given region V . Then the lower and upper limits of z
are the values of z corresponding to the parts of surface of the region V where the line enters and and
leaves (along the direction of positive z-axis) the region V . Let R be the region of projection of the three
dimensional region V on the xy-plane. We find the limits of x and y by considering the region R using
the methodZapplied
in double integrals.
ZZ
dxdydz
Ex. Solve
over a tetrahedron bounded by the coordinate planes and the plane
3
V (x + y + z + 1)
x + y + z = 1.
Sol. We find
ZZZ
Z 1 Z 1−x Z 1−x−y
dxdydz
1
1
5
=
dz dy dx = ln 2 − .
3
3
(x + y + z + 1)
2
16
V (x + y + z + 1)
0
0
0
15.3.3
Change of variables in triple integrals
Let a function f (x, y, z) be integrable over a region V in the xyz-space. Suppose V is mapped onto a
region V ′ in uvw-space by means of the transformations
x = g(u, v, w),
y = h(u, v, w),
y = k(u, v, w)
where g(u, v, w), h(u, v, w) and k(u, v, w) possess continuous partial derivatives in V ′ , and the Jacobian
∂(x, y, z)
J=
=
∂(u, v, w)
∂x
∂u
∂y
∂u
∂z
∂u
∂x
∂v
∂y
∂v
∂z
∂v
∂x
∂w
∂y
∂w
∂z
∂w
Then we have
ZZZ
ZZZ
f (x, y)dxdy =
̸= 0,
in V ′ .
f (g(u, v, w), h(u, v, w), k(u, v, w))|J|dudvdw.
V′
V
Notice that x, y and z are replaced by g(u, v, w), h(u, v, w) and k(u, v, w), respectively while dxdydz is
replaced by |J|dudvdw.
Change to cylindrical polar coordinates
Cylindrical coordinates represent a point P in space by ordered triples (r, θ, z) in which r and θ are
polar coordinates for the vertical projection of P on the xy-plane, and z is the rectangular vertical
coordinate. The equations of transformation from cartesian coordinates (x, y, z) to cylindrical polar
coordinates (r, θ, z) are
x = r cos θ,
y = r sin θ,
z = z,
where r ≥ 0, 0 ≤ θ ≤ 2π.
12
Figure 15.8: Cylindrical coordinates (r, θ, z)
The Jacobian of the cylindrical polar transformations is obtained as
∂(x, y, z)
J=
=
∂(r, θ, z)
ZZZ
∂x
∂r
∂y
∂r
∂z
∂r
∂x
∂θ
∂y
∂θ
∂z
∂θ
∂x
∂z
∂y
∂z
∂z
∂z
= r.
z(x2 + y 2 )dxdydz, where V = {(x, y, z) : x2 + y 2 ≤ 1, 2 ≤ z ≤ 3}.
Ex. Evaluate
V
Sol. Using x = r cos θ, y = r sin θ, z = z, the given cylindrical region V = {(x, y, z) : x2 + y 2 ≤ 1, 2 ≤
z ≤ 3} transforms to V ′ = {(r, θ, z) : 0 ≤ r ≤ 1, 0 ≤ θ ≤ 2π, 2 ≤ z ≤ 3} while dxdydz transforms to
|J|drdθdϕ = rdrdθdz. So we have
ZZZ
ZZZ
Z 3 Z 2π Z 1
5π
2
2
2
3
z(x + y )dxdydz =
z(r )rdrdθdϕ =
r zdr dθ dz =
.
4
V
V′
2
0
0
Ex. Find volume of the sphere x2 + y 2 + z 2 = a2 using
√ the cylindrical coordinates.
Sol. In cylindrical coordinates, r varies from 0 to a2 − z 2 ; z varies from −a to a, and θ varies from 0
to 2π, in the spherical region x2 + y 2 + z 2 ≤ a2 . So volume of the sphere is
Z 2π Z a Z √a2 −z 2
4π 3
rdrdzdθ =
a .
3
0
−a 0
Ex. Use cylindrical coordinates, to find volume of the sphere (x − 1)2 + (y − 1)2 + (z − 1)2 = 1 above the
plane z = 1.
Sol. Making a change of origin via the transformations, X = x − 1, Y = y − 1 and Z = z − 1, we need
to find the volume of the sphere X 2 + Y 2 + Z 2 = 1 above the plane√Z = 0. In cylindrical coordinates, we
use X = r cos θ, Y = r sin θ and Z = Z. Then r varies from 0 to 1 − Z 2 ; Z varies from 0 to 1, and θ
varies from 0 to 2π, in the spherical region X 2 + Y 2 + Z 2 ≤ 1. So the required volume is
Z 2π Z 1 Z √1−Z 2
2π
.
rdrdZdθ =
3
0
0
0
Change to spherical polar coordinates
Spherical coordinates represent a point P in space by ordered triples (ρ, ϕ, θ) in which ρ is the distance
−−→
from P to the origin; ϕ is the angle made by OP with the positive z-axis, and θ is the angle from cylindrical
coordinates
13
The equations of transformation from cartesian coordinates (x, y, z) to spherical polar coordinates
(ρ, ϕ, θ) are
x = ρ sin ϕ cos θ,
y = ρ sin ϕ sin θ,
z = ρ cos ϕ,
where ρ ≥ 0, 0 ≤ ϕ ≤ π and 0 ≤ θ ≤ 2π.
Figure 15.9: Spherical coordinates (ρ, ϕ, θ)
The Jacobian of the spherical polar transformations is obtained as
∂(x, y, z)
J=
=
∂(ρ, ϕ, θ)
ZZZ
∂x
∂ρ
∂y
∂ρ
∂z
∂ρ
∂x
∂ϕ
∂y
∂ϕ
∂z
∂ϕ
∂x
∂θ
∂y
∂θ
∂z
∂θ
= ρ2 sin ϕ.
(x2 +y 2 +z 2 )3 dxdydz, where V is the region enclosed by the unit sphere x2 +y 2 +z 2 = 1.
Ex. Evaluate
V
Sol. Using x = ρ sin ϕ cos θ, y = ρ sin ϕ sin θ, z = r cos ϕ, the given spherical region V = {(x, y, z) :
x2 + y 2 + z 2 ≤ 1} transforms to V ′ = {(ρ, ϕ, θ) : 0 ≤ ρ ≤ 1, 0 ≤ ϕ ≤ π, 0 ≤ θ ≤ 2π} while dxdydz
transforms to |J|dρdθdϕ = ρ2 sin ϕdρdθdϕ. So we have
ZZZ
Z 2π Z π Z 1
ZZZ
4π
2
2
2 3
2 3 2
8
(x + y + z ) dxdydz =
(ρ ) ρ sin ϕdρdθdϕ =
ρ sin ϕdρ dϕ dθ =
.
9
′
V
0
0
0
V
Ex. Find volume of the ellipsoid 2(x − 1)2 + 3(y − 2)2 + 5(z − 1)2 = 30.
Sol. The given equation of the ellipsoid can be recast as
(x − 1)2 (y − 2)2 (z − 1)2
+
+
= 1.
15
10
6
So the given 3D region is
(x − 1)2 (y − 2)2 (z − 1)2
+
+
≤ 1}.
15
10
6
√
√
√
Let us use the transformations: x − 1 = 15X, y − 2 = 10Y and z − 1 = 6Z. Then the transformed
region is
R = {(x, y, z) :
R′ = {(X, Y, Z) : X 2 + Y 2 + Z 2 ≤ 1},
with dxdydz = |J|dXdY dZ = 30dXdY dZ. Note that R′ is spherical region. Thus, using the spherical
coordinates via X = ρ sin ϕ cos θ, Y = ρ sin ϕ sin θ, Z = r cos ϕ, the required volume is
ZZZ
ZZZ
Z 2π Z π Z 1
2
dxdydz =
30dXdY dZ = 30
ρ sin ϕdρ dϕ dθ = 30(4π/3) = 40π.
R
R′
0
0
14
0
Ex. Find volume of the cylinder x2 + y 2 = 1, z ≥ 0 cut-off by the sphere x2 + y 2 + z 2 = 4 using (i)
spherical polar coordinates (ii) cylindrical polar coordinates.
Sol.
(i) In spherical polar coordinates, we have
x = ρ sin ϕ cos θ,
y = ρ sin ϕ sin θ,
z = ρ cos ϕ.
So x2 + y 2 = 1 =⇒ ρ2 sin2 ϕ =⇒ ρ = csc ϕ.
Now to find ρ-limits, consider a ray from the origin passing through the given region. We see that the
ray will come out of either the surface of the sphere or that of the cylinder. Let us call the corresponding
parts of the given 3-D region to be Region I (cone shaped region cut-off by the sphere (the ice-cream
shape)) and Region II (the remaining region).
In Region I, for any values of θ and ϕ, we see that ρ varies from ρ = 0 to ρ = 2 (for the points on the
surface of the sphere x2 + y 2 + z 2 = 4). Further for any value of θ, we see that ϕ varies from ϕ = 0 to
ϕ = π/6. Also, θ varies from θ = 0 to θ = 2π.
In Region II, for any values of θ and ϕ, we see that ρ varies from ρ = 0 to ρ = csc ϕ (for the points on
the curved surface of the cylinder x2 + y 2 = 1). Further for any value of θ, we see ϕ varies from ϕ = π/6
to ϕ = π/2. Also, θ varies from θ = 0 to θ = 2π.
Z
2π
Z
π/6 Z 2
∴ Required Volume =
0
0
ρ2 sin ϕ dρdϕdθ +
0
Z
2π
Z
0
π/2 Z csc ϕ
π/6
ρ2 sin ϕ dρdϕdθ
0
√
√
√
8π
2π 3
2π
=
(2 − 3) +
=
(8 − 3 3)
3
3
3
(ii) In cylindrical polar coordinates, we have
x = r cos θ,
y = r sin θ,
z = z.
To find z-limits, consider a line parallel
√ to z-axis through the given region. For any values of r and θ,
we see that z varies from z = 0 to z = 4 − r2 (for points on the surface of the sphere x2 + y 2 + z 2 = 4).
For any value of θ, we see that r varies from r = 0 to r = 1. Also, θ varies from θ = 0 to θ = 2π.
Z
2π
Z
1Z
∴ Required Volume =
√
4−r2
r dzdrdθ =
0
0
0
15
√
2π
(8 − 3 3).
3
Remark: In part (i), if the limits are found in the order ϕ, ρ and θ. Then
Z
2π
Z
2 Z π/6
Required Volume =
0
0
ρ2 sin ϕ dϕdρdθ +
2π
Z
0
Z
0
1
2 Z sin−1 (1/ρ)
ρ2 sin ϕ dϕdρdθ.
π/6
In part (ii), if the limits are found in the order r, z and θ. Then
Z
2π
√
Z
3Z 1
Z
2π
r drdzdθ +
Required Volume =
0
0
0
0
Z
2
√
√
Z
4−z 2
r drdzdθ
3
0
In part (ii), if the limits are found in the order θ, z and r. Then
Z
1Z
√
4−r2
Z
Required Volume =
2π
r dθdzdr.
0
0
0
p
Ex. Find volume of the cone z = x2 + y 2 , cut-off by the sphere x2 + y 2 + z 2 = 4 (cone-based ice-cream
shape with spherical top!).
Sol.
Z 2π Z π/4 Z 2
Required Volume =
ρ2 sin ϕ dρdϕdθ =?.
0
0
0
16
Ex. Find volume of the paraboloid z = x2 + y 2 cut-off by the planes z = 1 and z = 2 using cylindrical
coordinates.
Sol. Required volume is
Z
2 Z 2π
√
Z
z
rdrdθdz = 3π/2.
1
0
0
Alternatively, the required volume is
√
Z
2 Z 2π
Z
2
Z
1 Z 2π
Z
1
rdzdθdr = 2π − π/2 = 3π/2.
rdzdθdr −
0
r2
0
0
0
r2
Ex. Find volume of the paraboloid z = x2 + y 2 cut-off by the plane z = 2x + 2y − 1 using cylindrical
coordinates.
Sol. Intersection of the given paraboloid and plane is the circle x2 +y 2 = 2x+2y−1 or (x−1)2 +(y−1)2 = 1.
Using the transformations, x = 1 + r cos θ, y = 1 + r sin θ, z = z, we get dxdydz = rdrdθdz, and the
required volume is...
15.4
Summary and applications of multiple integrals
In this chapter, we have learned mainly the solution procedures of double and triple integrals. We have
noticed some geometrical applications as well. For instance, double integral can be utilized to find the
area of a region in xy-plane, and volume under a given 3D surface. Likewise, triple integral can be used
to determine the volume of a 3D region. In the following, let us see some physical applications of the
double and triple integrals.
15.4.1
Mass, centre of gravity and moments of intertia
Suppose f (x, y) is the density of a continuous and planar mass distribution (say, some thin and planar
lamina) occupying some region R in the xy-plane. Then total mass M of the lamina is given by
ZZ
M=
f (x, y)dxdy.
R
The coordinates, say xCG and yCG , of centre of gravity of the lamina are given by
ZZ
ZZ
1
1
xCG =
xf (x, y)dxdy, yCG =
yf (x, y)dxdy.
M
M
R
R
The moments of intertia, say Ix and Iy , about x-axis and y-axis are given by
ZZ
ZZ
2
Ix =
y f (x, y)dxdy, Iy =
x2 f (x, y)dxdy.
R
R
Further, if f (x, y, z) is the density of a continuous 3D mass distribution (say, some solid 3D object)
occupying some region V in the xyz-space, then total mass M of the 3D object is given by
ZZZ
M=
f (x, y, z)dxdydz.
V
The coordinates, say xCG , yCG and zCG , of centre of gravity of the 3D object are given by
ZZ
ZZZ
ZZZ
1
1
1
xCG =
xf (x, y, z)dxdydz, yCG =
yf (x, y, z)dxdydz, zCG =
zf (x, y, z)dxdydz.
M
M
M
V
V
V
17
The moments of intertia, say Ix , Iy and Iz , about x-axis, y-axis and z-axis are given by
ZZ
ZZ
ZZ
2
2
2
2
(x2 +y 2 )f (x, y, z)dxdydz.
(z +x )f (x, y, z)dxdydz, Iz =
(y +z )f (x, y, z)dxdydz, Iy =
Ix =
V
V
V
Ex. Find the mass and C.G. of a thin circular plate with uniform mass distribution occupying the region
x2 + y 2 ≤ 1 in xy-plane.
Sol. Let the density of the plate be f (x, y) = k, a constant (uniform mass distribution). Then total mass
M of the lamina is given by
ZZ
ZZ
M=
f (x, y)dxdy =
kdxdy = kπ.
R
x2 +y 2 ≤1
As expected, it is equal to mass per unit area (the density) multiplied by the total area of the circular
region.
The coordinates of C.G. are
ZZ
1
xCG =
xf (x, y)dxdy = 0,
M
R
yCG =
1
M
ZZ
yf (x, y)dxdy = 0. (Verify!)
R
As expected, the C.G. is at the center of the circular region.
Ex. Find the mass and C.G. of a solid 3D spherical object with uniform mass distribution occupying the
region x2 + y 2 + z 2 ≤ 1 in the xyz-space.
Sol. Verify that the total mass is the mass per unit volume (density) multiplied by the volume of the
spherical region. Next, C.G. lies at the origin.
18