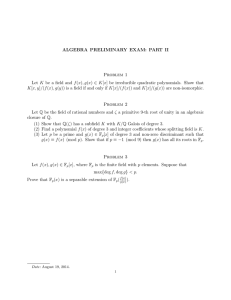
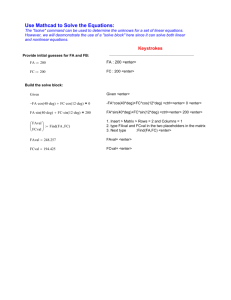
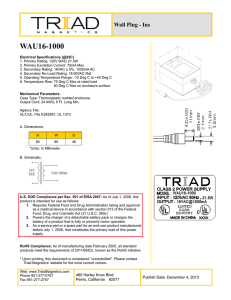
DESIGN OF MACHINERY - 6th Ed. SOLUTION MANUAL 4-6a-1 PROBLEM 4-6a Statement: The link lengths and value of 2 for some fourbar linkages are defined in Table P4-1. The linkage configuration and terminology are shown in Figure P4-1. For row a, draw the linkage to scale and graphically find all possible solutions (both open and crossed) for angles 3 and 4. Determine the Grashof condition. Given: Solution: Link 1 d 6 in Link 2 a 2 in Link 3 b 7 in Link 4 c 9 in θ2 30 deg See figure below for one possible solution. Also see Mathcad file P0406a. 1. Lay out an xy-axis system. Its origin will be the link 2 pivot, O2. 2. Draw link 2 to some convenient scale at its given angle. 3. Draw a circle with center at the free end of link 2 and a radius equal to the given length of link 3. 4. Locate pivot O4 on the x-axis at a distance from the origin equal to the given length of link 1. 5. Draw a circle with center at O4 and a radius equal to the given length of link 4. 6. The two intersections of the circles (if any) are t he two solutions to the position analysis problem, crossed and open. If the circles don't intersect, there is no solution. 7. Draw links 3 and 4 in their two possible positions (shown as solid for open and dashed for crossed in the figure) and measure their angles 3 and 4 with respect to the x-axis. From the solution below, OPEN θ31 88.84 deg θ41 117.29 deg CROSSED θ32 360 deg 115.21 deg θ32 244.790 deg θ42 360 deg 143.66 deg θ42 216.340 deg DESIGN OF MACHINERY - 6th Ed. 8. SOLUTION MANUAL 4-6a-2 y Check the Grashof condition. B OPEN 3 4 88.837° 2 O2 117.286° A 115.211° O4 143.660° CROSSED B' Condition( a b c d ) S min ( a b c d ) L max( a b c d ) SL S L PQ a b c d SL return "Grashof" if SL PQ return "Special Grashof" if SL = PQ return "non-Grashof" otherwise Condition( a b c d ) "Grashof" x DESIGN OF MACHINERY - 6th Ed. SOLUTION MANUAL 4-7a-1 PROBLEM 4-7a Statement: The link lengths and value of 2 for some fourbar linkages are defined in Table P4-1. The linkage configuration and terminology are shown in Figure P4-1. For row a, find all possible solutions (both open and crossed) for angles 3 and 4 using the vector loop method. Determine the Grashof condition. Given: Solution: 1. Link 1 d 6 in Link 2 a 2 in Link 3 b 7 in Link 4 c 9 in See Mathcad file P0407a. Determine the values of the constants needed for finding 4 from equations 4.8a and 4.10a. K1 d K2 a K1 3.0000 2 d K3 c K2 0.6667 B 2 sin θ C K K 1 cos θ K 2 2 B 1.0000 C 3.5566 3 θ41 2 atan2 2 A B B 4 A C 2 θ41 242.714 deg θ41 θ41 360 deg θ41 602.714 deg Crossed: θ42 2 atan2 2 A B B 4 A C 2 θ42 216.340 deg Determine the values of the constants needed for finding 3 from equations 4.11b and 4.12. K4 2 d K5 b 2 2 c d a b 2 a b E 2 sin θ F K K 1 cos θ K 4 2 K4 0.8571 D 1.6774 E 1.0000 2 1 2 K5 0.2857 D cos θ2 K1 K4 cos θ2 K5 4. 2 a c Use equation 4.10b to find values of 4 for the open and crossed circuits. Open: 3. 2 A 0.7113 2 1 2 a b c d K3 2.0000 A cos θ2 K1 K2 cos θ2 K3 2. θ2 30 deg F 2.5906 5 Use equation 4.13 to find values of 3 for the open and crossed circuits. Open: θ31 2 atan2 2 D E E 4 D F 2 θ31 271.163 deg 2 DESIGN OF MACHINERY - 6th Ed. SOLUTION MANUAL 4-7a-2 θ31 θ31 360 deg Crossed: 5. θ32 2 atan2 2 D E θ31 631.163 deg E 4 D F 2 Check the Grashof condition. Condition( a b c d ) S min ( a b c d ) L max( a b c d ) SL S L PQ a b c d SL return "Grashof" if SL PQ return "Special Grashof" if SL = PQ return "non-Grashof" otherwise Condition( a b c d ) "Grashof" θ32 244.789 deg DESIGN OF MACHINERY - 6th Ed. SOLUTION MANUAL 4-9a-1 PROBLEM 4-9a Statement: The link lengths, value of 2, and offset for some fourbar slider-crank linkages are defined in Table P4-2. The linkage configuration and terminology are shown in Figure P4-2. For row a, draw the linkage to scale and graphically find all possible solutions (both open and crossed) for angles 3 and slider position d. Given: Solution: Link 2 a 1.4 in Link 3 b 4 in Offset c 1 in θ2 45 deg See figure below for one possible solution. Also see Mathcad file P0409a. 1. Lay out an xy-axis system. Its origin will be the link 2 pivot, O2. 2. Draw link 2 to some convenient scale at its given angle. 3. Draw a circle with center at the free end of link 2 and a radius equal to the given length of link 3. 4. Draw a horizontal line through y = c (the offset). 5. The two intersections of the circle with the horizontal line (if any) are the two solutions to the position analysis problem, crossed and open. If t he circle and line don't intersect, there is no solution. 6. Draw link 3 and the slider block in their two possible positions (shown as solid for open and dashed for crossed in the figure) and measure the angle 3 and length d for each circuit. From the solution below, θ31 360 deg 179.856 deg θ31 180.144 deg θ32 0.144 deg d 2 3.010 in d 1 4.990 in DESIGN OF MACHINERY - 6th Ed. SOLUTION MANUAL 4-9a-2 Y d2 = 3.010 d1 = 4.990 3(CROSSED) B' 0.144° A 2 O2 45.000° 3 (OPEN) B 179.856° 1.000 X DESIGN OF MACHINERY - 6th Ed. SOLUTION MANUAL 4-10a-1 PROBLEM 4-10a Statement: The link lengths, value of 2, and offset for some fourbar slider-crank linkages are defined in Table P4-2. The linkage configuration and terminology are shown in Figure P4-2. For row a, using the vector loop method, find all possible solutions (both open and crossed) for angles 3 and slider position d. Given: Solution: Link 2 a 1.4 in Link 3 b 4 in Offset c 1 in θ2 45 deg See Figure P4-2 and Mathcad file P0410a. Y d2 = 3.010 d1 = 4.990 3(CROSSED) B' A 2 0.144° 45.000° 3 (OPEN) B 179.856° 1.000 X O2 1. Determine 3 and d using equations 4.16 and 4.17. Crossed: a sin θ2 c θ32 asin b θ32 0.144 deg d 2 a cos θ2 b cos θ32 d 2 3.010 in Open: a sin θ2 c θ31 asin π b θ31 180.144 deg d 1 a cos θ2 b cos θ31 d 1 4.990 in DESIGN OF MACHINERY - 6th Ed. SOLUTION MANUAL 4-23-1 PROBLEM 4-23 Statement: For the linkage in Figure P4-10, calculate and plot the angular displacement of links 3 and 4 and the path coordinates of point P with respect to the angle of the input crank O2A for one revolution. B y 3 b P p 4 A 2 a 2 4 c d Given: x 1 O2 O4 Link lengths: Ground link d 2.22 Crank a 1.0 Coupler b 2.06 Rocker c 2.33 Coupler point data: p 3.06 Solution: δ 31.00 deg See Figure P4-10 and Mathcad file P0423. 1. Define one revolution of t he input crank: θ2 0 deg 1 deg 360 deg 2. Use equation 4.8a and 4.10 to calculate 4 as a function of 2 (for the open circuit). K1 d K2 a 2 d K3 c K1 2.2200 K2 0.9528 B θ 2 sin θ C θ K K 2 2 a c K3 1.5265 A θ2 cos θ2 K1 K2 cos θ2 K3 2 2 2 θ41 θ2 2 atan2 2 A θ2 B θ2 3. 1 2 1 cos θ2 K3 2 4A θ Cθ B θ2 2 2 If the calculated value of 4 is greater than 2, subtract 2 from it. θ4 θ2 if θ41 θ2 2 π θ41 θ2 2 π θ41 θ2 4. 2 a b c d Determine the values of the constants needed for finding 3 from equations 4.11b and 4.12. 2 DESIGN OF MACHINERY - 6th Ed. K4 SOLUTION MANUAL 4-23-2 2 d K5 b E θ 2 sin θ 2 2 c d a b 2 K4 1.0777 2 a b F θ K K K5 1.1512 D θ2 cos θ2 K1 K4 cos θ2 K5 2 5. 2 2 1 1 cos θ2 K5 Use equation 4.13 to find values of 3 for the open circuit. θ31 θ2 2 atan2 2 D θ2 E θ2 6. 4 2 4Dθ Fθ E θ2 2 2 If the calculated value of 3 is greater than 2, subtract 2 from it. θ3 θ2 if θ31 θ2 2 π θ31 θ2 2 π θ31 θ2 Plot 3 and 4 as functions of the crank angle 2 (measured from the ground link). Angular Displacement of Coupler 240 260 Coupler angle, deg 7. θ3 θ2 280 deg 300 320 340 0 60 120 180 θ2 deg Crank angle, deg 240 300 360 DESIGN OF MACHINERY - 6th Ed. SOLUTION MANUAL 4-23-3 Angular Displacement of Rocker 200 Rocker angle, deg 220 240 θ4 θ 2 deg 260 280 0 60 120 180 240 300 360 θ2 deg Crank angle, deg 8. Use equation 4.31 to define the x- and y-components of the vector RP. RP RA RPA p cos θ δ j sin θ δ θ acosθ p cosθ θ δ RA a cos θ2 j sin θ2 RPA RPx 9. 3 2 3 2 3 2 RPy θ2 a sin θ2 p sin θ3 θ2 δ Plot the coordinates of the coupler point in the local xy coordinate system. DESIGN OF MACHINERY - 6th Ed. SOLUTION MANUAL 4-23-4 COUPLER POINT CURVE 3 2.5 Y 2 1.5 1 0.5 1.5 2 2.5 3 X 3.5 4