Radio Frequency Engineering
Lecture Notes for TLM2006
Neelakantam Venkatarayalu
Copyright © 2023 Neelakantam Venkatarayalu
S INGAPORE I NSTITUTE O F T ECHNOLOGY
WWW. SINGAPORETECH . EDU . SG / DIRECTORY / FACULTY / NEELAKANTAM - V- VENKATARAYALU
January 2023
Contents
1
Introduction .................................................................................................................................................................................................. 9
1.1
Classification of RF Spectrum
1.1.1
1.1.2
Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Communication System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2
Fundamental Concepts ................................................................................................................................................. 15
2.1
Signal representation
2.1.1
2.1.2
2.1.3
Periodic Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Phasor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Time domain and frequency domain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2
Electrical Quantities and Units
2.2.1
2.2.2
Decibels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
RMS Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.3
Impedance
9
15
17
21
21
23
23
25
3.3
Load Termination
39
3.3.1
3.3.2
3.3.3
3.3.4
3.3.5
3.3.6
3.3.7
Reflection Coefficient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Matched Load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Short Circuit Load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Open Circuit Load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
VSWR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Why 50Ω? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Maximum Power Transfer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
41
41
43
45
47
47
3.4
Smith Chart
49
3.4.1
3.4.2
Impedance Transformation of General Load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Impedance Transformation of Short Circuit and Open Circuit . . . . . . . . . . . . . . . . . . 57
3.5
Transient Signal Propagation
3.5.1
3.5.2
Resistive Load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Short circuit and Open circuit Load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4
Network Theory ................................................................................................................................................................................ 63
4.1
Z-Parameters
63
4.2
Y-Parameters
63
4.3
S-Parameters
65
4.3.1
4.3.2
Meaning of S-parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Input and Output impedance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.4
Return loss and Insertion loss
67
4.5
Properties of S-parameters
69
4.5.1
4.5.2
4.5.3
4.5.4
4.5.5
Matching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Conjugate Matching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reciprocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Symmetry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Passive and Loss-less networks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
69
69
69
69
4.6
Measuring S-parameters
71
5
Impedance Matching ....................................................................................................................................................... 73
5.1
Admittance Chart
5.1.1
Impedance and Admittance Chart . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.2
Series and Shunt LC elements
Series Elements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Shunt Elements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Summary of LC matching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
59
73
2.3.1
2.3.2
2.3.3
2.3.4
Resistance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Capacitance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Inductance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
High Frequency Parasitics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
Transmission Lines ....................................................................................................................................................................... 29
5.2.1
5.2.2
5.2.3
3.1
What is a Transmission Line?
5.3
Distributed Element Matching
3.1.1
Examples of Transmission lines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.2
Transmission Line Theory
33
6
Passive Devices ............................................................................................................................................................................... 83
3.2.1
3.2.2
3.2.3
3.2.4
3.2.5
Phase Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Telegrapher’s Equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Characteristic Impedance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Losses in Transmission Lines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Loss-less transmission line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
35
37
37
39
6.1
Resonance
6.1.1
Quality Factor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
6.2
Filter
6.2.1
Types of RF Filters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
29
75
81
83
85
6.3
6.4
6.5
6.6
6.7
6.8
Termination
Attenuator
Circulator
Power Divider
Directional Coupler
Balun
87
87
87
89
89
89
7
Active Devices .................................................................................................................................................................................. 93
7.1
7.2
Radio receiver
Amplifier
7.2.1
7.2.2
7.2.3
7.2.4
7.2.5
7.2.6
7.2.7
7.2.8
Transistor as an amplifier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Harmonic Distortion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Gain Compression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Intermodulation Product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Transistors and Semiconductor Material . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Elements of an RF amplifier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Classes of Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Biasing Network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
7.3
Oscillator
7.3.1
7.3.2
Phase Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Voltage Controlled Oscillator (VCO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
7.4
7.5
Phase Locked Loop
Mixer
93
93
105
107
107
7.5.1
Image Frequency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
7.6
Transceiver Architectures
8
Antennas and Propagation ................................................................................................................................ 111
8.1
Antenna Parameters
8.1.1
Input Impedance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
8.2
Radiation Parameters
8.2.1
8.2.2
Radiation Pattern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Polarization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
8.3
8.4
8.5
Friss Transmission Equation
Radar Range Equation
Antenna Types and Design
8.5.1
8.5.2
Wire Antennas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Planar Antennas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
109
111
115
121
123
123
8
Chapter 1. Introduction
1. Introduction
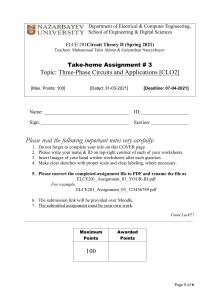
Figure 1.1: Radio Frequency waves as part of the electromagnetic spectrum and their applications.
Source:Internet
Electromagnetic energy propagates as waves in space in the form of time-varying electric and magnetic fields. The frequencies of variation of the electric and magnetic fields is referred to as spectrum.
The frequencies or spectrum can vary over a very wide range from low-frequencies to very high frequencies. For instance the Alternating Current (AC) power supply frequency is 50Hz (in most of
the world and 60Hz in the United States) is considered low frequency and X-rays on the other end
of the spectrum is extremely high frequency1 . Visible light (visible to the human eye) is part of the
electromagnetic spectrum. Part of the electromagnetic spectrum is the radio frequency (RF) waves,
specifically between 3kHz to 300GHz as illustrated in the Figure 1.1. Though wireless communications is one area where RF spectrum is widely used, physical characteristics of radio-waves make
them useful in many applications such as remote sensing, RADAR (radio detection and ranging),
satellite communications and in many other electronic sensor systems.
Frequency and wavelength of electromagnetic signals are related to the speed of propagation of
the signal in the specific medium. The speed of propagation is dependent on the permittivity and
permeability of the medium2 . The speed of electromagnetic signal propagation in air/vacuum/free
space is c = 3 × 108 m/s. The speed in any other medium (such as wood, concrete walls) etc., is lower
than that in air.
The wavelength λ and frequency f are related to the speed of the wave which is referred to as the
phase velocity, v p . Their relationship is given as
vp = f λ
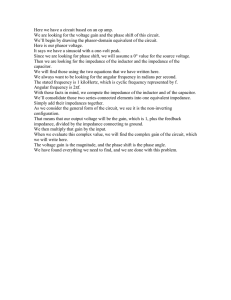
specific frequency bands used for typical applications. The 300MHz to 3GHz is the frequency band
that is widely used for mobile telephony. 3GHz to 30GHz is typically used for satellite communications.
(1.1)
When the medium is air, v p = c. When there are two or more different media through which an
electromagnetic wave propagates, the frequency of the wave remains the same in the different media.
It is the wavelength that changes depending on the phase velocity in that particular medium.
1.1
Figure 1.2: Radio Frequency split into bands with each band typically for a specific kind of application. Source:Internet
Classification of RF Spectrum
The 3kHz to 300GHz electromagnetic spectrum, called the RF spectrum is further classified into various frequency bands with each band typically allocated for specific applications. Figure 1.2 illustrates
1 Low frequency electromagnetic waves are non-ionizing radiation and do not (or atleast not proven conclusively until
now) to cause damage to the human body. Very high frequency electromagnetic radiation such as X-rays and Gamma rays
are ionizing in nature and are detrimental to tissues in organisms.
2 Refer to TLM1006-Electricity and Magnetism slides to refresh the fundamentals of Electromagnetic Waves
1.1.1
Applications
The specific applications linked to the different spectral band allocations can broadly be classified into
Mobile Telephony, Wireless Networks, Radio Identification, Navigation, RADAR and Television &
Radio broadcast. Typical RF applications and their corresponding frequency band allocation is listed
in Table 1.1.
In the automotive and intelligent transportation systems applications, Radio Frequency devices
serve as the enablers for a variety of services such as
1. V2X : Vehicle-to-vehicle (V2V) and Vehicle-to-infrastructure (V2I) communications using either DSRC (dedicated short-range communication) built on WLAN or alternatively through
Cellular V2X built on LTE or the evolving 5G mobile communication standards.
2. Navigation : These include applications built on GPS (Global Positioning system) and GNSS
for location determination
1.1 Classification of RF Spectrum
9
10
Chapter 1. Introduction
Figure 1.3: Typical Communication System.
Mobile Telephony
GSM 900, 1800
Global System for mobile
communication (2G)
UMTS
Universal Mobile Telecommunication system (3G)
LTE
Long Term Evolution (4G)
TETRA
Trunked Radio
Wireless Networks
WLAN
Wireless local area network
Bluetooth
Short Range Radio
ZigBee
Sensor Networks
Radio Identification
RFID
Radio Frequency Identification (LF, UHF)
UWB-RFID
Navigation
GPS
Ultrawideband RFID
Global Positioning System
Global Navigation Satellite System (GLONASS) Galileo, Beidou, IRNSS
Radar Applications
SRR
Automotive Short Range
Radar
ACC
Adaptive Cruise Control
Television and Radio
FM
Analog FM radio
Digital Audio Broadcast
DAB
DVB-T
Digital Video Broadcast Terrestrial
DVB-S
Digital Video Broadcast
Satellite
880960MHz
1.711.88GHz
1.92 2.17 GHz
3. RADAR : These include either Long Range or Short Range for applications such as cruise
control, auto-parking, collision avoidance etc.,.
4. Vehicular networks : These include on-board communications between multiple senors through
either wired or wireless interfaces
5. Accessories and services : These include services such as key-less vehicle access, proximity
sensing, wireless interface with personal or wearable devices.
452.5MHz5.925GHz
440470MHz
2.45GHz, 5GHz
2.45 GHz
2.45 GHz
13.56MHz, 868
MHz, 2.45GHz,
5GHz
3GHz10GHz
1.2GHz,
1.575GHz
GNSS
24GHz
77GHz
87.5108MHz
223230MHz
470790 MHz
10.712.75 GHz
Table 1.1: RF applications and their frequency bands
1.1.2
Communication System
Since most of the RF applications are for communications, we will briefly look into the key aspects
of a wireless communication system. It consists of a transmitter and a receiver as shown in Figure 1.3.
The key blocks in the transmitter and receiver is shown in Figure 1.4. The transmitter consists of
a modulator or a up-converter that shifts the information signal called the base-band (voice or data)
to RF for wireless transmission. This is necessary since wireless transmission and radiation through
antennas can be done efficiently when the information is carried in RF waves rather than in the form
of base-band data. Further to the modulator is the Power amplifier (PA) that boosts the signal strength
to a required level so that desired range/distance for wireless transmission link is achieved. The PA
is finally connected to an Antenna that radiates energy into air. Most often antennas have directional
properties so that they radiate strongly in a particular direction while weakly in other directions.
The receive chain is in essence performs the reverse operations of the transmit chain to recover
the base-band signal that was transmitted originally. The RF signal received by the antenna, which
is much lower in signal strength due to the propagation characteristics of the energy in the air, is
first boosted up in power using a Low Noise Amplifier (LNA). Following the amplification, the RF
signal with considerably higher power is fed to the demodulator to convert the signal back to the
base-band data (voice or data). The received data is the reconstructed data that may or may not be the
same as the transmitted data depending on various characteristics such as losses in the system, noise
in the channel, propagation conditions and related effects. A receiver with good sensitivity, able to
distinguish signal from noise, is necessary to decode and reconstruct the transmitted signal reasonably
well. A good wireless link can then be realized.
RF Engineering encompasses all aspects of a communication system from generation, to transmission and finally reception of radio frequency waves. It includes aspects of
• Transmission of signals through cables
• Antenna systems for suitable radiation
• RF circuit design with active and passive elements such as oscillators, amplifiers, mixers, detectors, combiners and filters.
• Measurement and performance analysis of such devices and systems
All the aspects mentioned above will be covered in this set of lecture materials.
1.1 Classification of RF Spectrum
Figure 1.4: Typical Communication System.
11
14
Chapter 2. Fundamental Concepts
Figure 2.1: Illustration of a periodic signal
2. Fundamental Concepts
2.1
Signal representation
Signals are of two kinds: periodic signals and aperiodic signals. Periodic signals are those which
repeat themselves after a certain fixed time period. RF signals generated by circuits are periodic in
nature, more specifically sinusoidal in nature, while random signals generated due to noise in the
system are aperiodic in nature. It is therefore, of our interest to study the parameters that describe the
periodic signals and their representation.
2.1.1
Using the Euler’s identity e jθ = cos θ + j sin θ , the infinite series can be written using exponents
as
∞
v(t) = a0 +
Periodic Signals
∑
Vn e jnω0t
(2.5)
n=−∞
When a periodic signal v(t), repeats itself after time T then the time period of the signal is T . For such
a signal, the value of the signal at any time t is the same as the value at time t + T . Mathematically,
v(t + T ) = v(t) = v(t + kT )
(2.1)
where k is any integer. Such a signal is illustrated in Figure 2.1. For such a periodic signal the
fundamental frequency is defined as
f0 =
Figure 2.2: Illustration of discrete spectrum of a periodic signal.
1
T
(2.2)
The fundamental frequency is the number of repetitions of the periodic signal in one second and has
the units of Hertz (Hz) or cycles per second. Correspondingly, since one cycle has 2π radians one can
define the angular frequency ω0 as
ω0 = 2π f0 =
2π
T
In the above series representation of a periodic signal a0 represents the zero frequency term which
is independent of time1 . The term e jnω0t corresponds to the nth harmonic and Vn is the Fourier series
coefficient of the nth harmonic. Notice that the periodic signal has a discrete frequency spectrum i.e,
having components at specific frequencies which are integer multiples of the fundamental frequency
f0 , as shown in Figure 2.2. Vn in general is a complex number having both real and imaginary parts.
Shown in Figure 2.2 is the magnitude |Vn |. Both the magnitude and the phase ∠Vn are needed to
recover back the periodic time domain signal.
In such frequency domain representations, the term e jω t is called the time-harmonic term that
captures the harmonic or sinusoidal variation of the signal with respect to time. The time dependence,
by Euler’s formula is then
e jω t = cos ω t + j sin ω t
(2.6)
(2.3)
By Fourier series theory, any periodic signal in time can be written as a sum of infinite trigonometric(sinusoidal) signals with frequencies being integer multiples of the fundamental frequency f0 .
Video link: Periodic Signals - Complex Representation
∞
v(t) = a0 + ∑ an cos nω0t + bn sin nω0t
n=1
(2.4)
1The
zero frequency term is also referred to as DC - direct current term borrowed from electrical power systems.
2.1 Signal representation
15
16
Chapter 2. Fundamental Concepts
Figure 2.4: Measurement equipment to monitor signals in the time domain (oscilloscope) and in the
frequency domain (spectrum analyzer and network analyzer).
2.1.3
Figure 2.3: Time-harmonic signal as a rotation phasor in the complex plane.
2.1.2
Phasor
Time-harmonic signals are periodic having sinusoidal dependence with time. Consider a signal with
angular frequency ω = 2π f represented as
v(t) = V0 cos(ω t + ϕ0 ) = ℜe{V̄ e jω t }
dv(t) dℜe{V̄ e jω t }
=
= ℜe{ jω V̄ e jω t }
dt
dt
(2.7)
V̄ = V0 e jϕ0
(2.8)
Notice that the dependence with time is of the form e jω t . It is only a convention to choose the
harmonic signal as cos ω t. It can be chosen as sin ω t as well and in which case the real time domain
signal v(t) = ℑm{V̄ e jω t }. This convention is equally valid and used sometimes.
Since the form of time dependence is fixed as e jω t , it can be dropped altogether in the representation (purely for convenience). The form of time dependence is implicitly understood. It is the
coefficient of e jω t term which is V̄ that is then important to recover back the time domain signal. V̄ is
called a phasor that represents the time-harmonic signal. The phasor is complex and is independent
of time.
Through the phasor representation as in eq. 2.8, the time-harmonic (sinusoidal) signals can be
visualized as real-axis projection of vectors rotating in the complex plane 2 as shown in Figure 2.3.
The phasor rotates in the complex plane in the counter-clockwise direction making f = 2ωπ cycles in
one second. Notice that the summation in eq. 2.5 has n to be both positive and negative. The negative
n corresponds to negative frequency which means the phasor is rotating in the clockwise direction.
The phasor for the sinusoidal signal is a snapshot of the corresponding vector in complex plane at
t = 0.
2 Complex
plane is a two dimensional plane with x−-axis being the real axis and y− axis being the imaginary axis.
(2.9)
If the phasor of the original signal v(t) is V̄ , then the phasor of the time derivative dv(t)
dt is j ω V̄ .
Thus dtd ≡ jω . This fact is very useful in electrical circuit analysis when the analysis is done in the
frequency domain. It is often easier to analyze the effect of signals and circuits in the frequency domain than in the time domain. The circuit analysis using Kirchoff’s voltage and current laws, when
done in the time domain lead to integro-differential equations in general. The same analysis when
done in the frequency domain lead to algebraic equations which are much easier to solve.
In reality, measurement of signals can be carried out either in the time-domain or frequencydomain. Oscilloscope is used to measure a signal in the time-domain. Spectrum analyser (SA) and
Vector Network Analyzers (VNA) are used to measure the signal characteristics in the frequencydomain. Typical equipment used to measure RF signals shown in Figure 2.4.
2.2
Electrical Quantities and Units
Electric potential or Voltage is measured in Volts (V). Current is measured in amperes (A) and power
is measured in Watts (W). In typical radio communication systems, the transmit Power is (very) high,
in the order of 103 106 Watts. The received power due to losses in the nature of propagation of signals
is in the order of 10−12 10−9 Watts.
2.2.1
Video link: Phasor representation
Time domain and frequency domain
Signals can be represented either in the time domain (real) or equivalently in the frequency domain
(as complex phasors). Since the phasor absorbs the time-dependence of the form e jω t implicitly, the
operation of time derivatives of signals in time domain is equivalent to the operation of multiplication
in the frequency domain.
Decibels
The dynamic range of power and associated electrical quantities can be quite large, eg., powers can
range in the order of pico-watts (pW) to mega watts (MW). In order to express physical quantities
2.2 Electrical Quantities and Units
17
18
with such large dynamic ranges, the decibel scales are very useful. Decibels (dB) being in logarithmic
scale can effectively represent large dynamic ranges.
Decibels are the ratio of two physical quantities. Absolute quantity levels are expressed in dB by
giving their value above or referenced to some base quantity. For example voltages can be expressed
in decibels with respect to either 1V or 1mV or 1µ V for example as
• 1V as 0dB or
• 1mV as 0dBmV or
• 1µ V as 0dBµ V
The value of physical quantity is obtained in decibel with respect to a base quantity. For example,
Vsig
Vsig |dB = 20 log
(2.10)
1V
Vsig
Vsig |dBmV = 20 log
(2.11)
1mV
Vsig
Vsig |dBµ V = 20 log
(2.12)
1µ V
Similarly for power,
Psig
Psig |dB = 10 log
1W
Psig
Psig |dBm = 10 log
1mW
Psig
Psig |dBµ = 10 log
1µ W
Chapter 2. Fundamental Concepts
Figure 2.5: Peak, peak-to-peak and RMS value of a sinusoidal signal.
Exercise 2.1 The minimum received signal strength required for a certain bluetooth receiver is
-70dBm. What is this power in Watts?
■
The ratio of electrical quantities at the output to that in the input can also be expressed in dB.
Common quantities are the power and the voltages. For example one can define voltage (power) gain
as the ratio of output voltage (power) to input voltage (power) as
Vout
AV |dB = 20 log
(2.18)
V
in Pout
AP |dB = 10 log
(2.19)
Pin
(2.13)
(2.14)
(2.15)
Note that when expressing power in watts, it is often written as dB which explicitly means dBW or
power referenced to 1W. Thus, a power quantity expressed in dB refers to power with respect to 1W,
unless it is expressed explicitly as dBm or dBµ . Since multiplication becomes addition in logarithm
scale, conversion from dB to dBm or dBµ is straight forward. Since 1W = 103 mW = 106 µ W, one
simply needs to add +30 (or +60) while converting dB to dBm (or dBµ ).
Video link: decibel(dB) - Logarithmic scale
2.2.2
Psig |dBm = Psig |dB + 30
Psig |dBµ = Psig |dBm + 30
= Psig |dB + 60
RMS Voltage
For sinusoidal signals, the magnitude of phasor represents the root mean square (RMS) value. RMS
value of the voltage is amount of power that produces the same heating effect (power dissipation) as
an equivalent DC power. The RMS value of voltage is related to the peak voltage and peak-to-peak
voltage as
Converting from dB scale to linear scale for power and voltage(current) quantities are then
Psig [W] = 10(Psig |dB /10)
(2.16)
Vsig [V] = 10(Vsig |dBV /20)
(2.17)
Vp
Vpp
Vrms = √ = √
2 2 2
(2.20)
The different voltage parameters such as Vp ,Vpp and Vrms that can be defined for a sinusoidal signal
are illustrated in Figure 2.5. Unless explicitly specified, the voltages of the AC or time-harmonic RF
signals refers to RMS values. If peak voltage or peak-to-peak voltages are to specified then it must
be explicitly mentioned. To compute the power dissipated by a AC or RF signal, with voltage V
(implicitly refers to the RMS voltage) across a resistor R is
P=
Video link: decibels(dB) - Gain
V2
R
(2.21)
Example 2.1 An amplifier senses a sinusoidal signal and delivers a power of 0 dBm to a load resistance of 50Ω. Determine the peak-to-peak voltage swing across the load.
■
2.3 Impedance
19
20
Chapter 2. Fundamental Concepts
Figure 2.6: R, L and C and their relationship with voltage, current, charge and magnetic flux.
Given the power delivered by the amplifier to the load resistance, all the power is dissipated by
that load resistance. From the power dissipated by the resistor, the RMS voltage is obtained and then
the peak-to-peak voltage.
0dBm corresponds to 10(0/10) = 1mW. To find the peak-to-peak voltage,
Figure 2.7: Load represented by an impedance that relates the terminal voltage to the current.
impedance which is the ratio of the voltage to the current.
V (ω )
I(ω )
= R(ω ) + jX(ω )
2
Vrms
V2
= rms = 1mW
RL
50
√
Vrms = 0.05
√
Vp
Vpp
Vrms = √ = √ = 0.050
2 2 2
√
Vpp = 2 0.1 = 632mV
Z(ω ) =
(2.22)
(2.23)
The real part of the impedance is the resistance R(ω ) and the imaginary part of the impedance is the
reactance X(ω ). Note that the impedance Z(ω ) is in general a function of frequency.
The inverse of the impedance is defined as admittance Y (ω ). Admittance is is the ratio of current
to voltage.
■
I(ω )
1
=
Z(ω ) V (ω )
= G(ω ) + jB(ω )
jX
R
= 2− 2
|Z|
|Z|
Y (ω ) =
Video link: Root Mean Square Voltage
(2.24)
(2.25)
(2.26)
The real part of the admittance is the conductance G(ω ) and the imaginary part of admittance is the
susceptance B(ω ).
Exercise 2.2 Derive the relationship shown in eq. 2.26 between the resistance and conductance
2.3
and between reactance and susceptance.
Impedance
The three fundamental electrical circuit components are resistors, capacitors and inductors each exhibiting (ideally) an electrical property of resistance, capacitance and inductance respectively. Recall
from TLM1006 that charge is source of electric field and current is the source of magnetic flux. The
flow of charges leads to current and the change of flux leads to voltage (emf). The causes viz., charge
and magnetic flux and their corresponding effect viz., the voltage and current are depicted in Figure 2.6. As seen the relation between the causes and effects are dependent on the three electrical
properties as
1. Resistance which relates change in voltage to change in current
2. Capacitance which relates change in charge to change in voltage
3. Inductance which relates change in magnetic flux to change in current
In RF systems, power is delivered to the load that can consist of (or can be equivalently represented through) a combination of resistors, capacitors and inductors. In order to determine the relationship between the voltage v(t) applied across and the current i(t) that flows through such a load,
we resolve to the time-harmonic representation V (ω ) and I(ω ) and represent the load as a complex
2.3.1
■
Resistance
The voltage across and current through a resistor obey the Ohm’s law and are related in the time and
frequency domain as
v(t) = i(t)R
V (ω ) = I(ω )R
(2.27)
(2.28)
The instantaneous sinusoidal voltage and current waveform across an ideal resistor is shown in Figure 2.8 where the voltage and current are said to be in-phase with each other meaning the voltage
and current phasors are in same direction at any instant in the complex plane. The impedance of the
resistor is therefore,
Z(ω ) =
V (ω )
=R
I(ω )
2.3 Impedance
21
22
Figure 2.8: Time-dependent voltage across and current through a resistor.
Chapter 2. Fundamental Concepts
Figure 2.9: Time-dependent voltage across and current through a capacitor.
The impedance is purely resistive with no reactance (imaginary part is zero). The average power
dissipated by the resistor is obtained as the average of the instantaneous power p(t) = v(t)i(t). For
time-harmonic signals the average power dissipated is obtained as
vR (t) = V0 cos ω t
V0
iR (t) = cos ω t
R
V02
V2
cos2 ω t = 0 [1 + cos 2ω t]
R
2R
Z
2
V02 Vrms
1 T
Pavg =
pR (t) dt =
=
T 0
2R
R
It is observed that instantaneous power dissipation is not a constant and is in fact pulsating at twice
V0
the frequency of the voltage signal ((2ω )). The RMS value of the voltage Vrms = √
is established
2
due to averaging of the pulsating power dissipation over one time period.
pR (t) = vR (t)iR (t) =
2.3.2
Capacitance
The voltage across and current through a capacitor are related in the time and frequency domain as
v(t) =
1
C
Z t
−∞
i(t) dt
(2.29)
1
V (ω ) =
I(ω )
(2.30)
jω C
1
= e− jπ /2
(2.31)
I
ωC
The instantaneous sinusoidal voltage and current waveform across an ideal capacitor is shown in
Figure 2.9 where the voltage lags the current by a phase of 90◦ or π /2. This means the current phasor
is 90◦ ahead (in the counter-clockwise direction) to the voltage phasor at any instant in the complex
plane. The impedance of the capacitor is therefore,
1
V (ω )
Z(ω ) =
=
I(ω )
jω C
The impedance is purely reactive with negative reactance and no resistance (real part is zero). The
average power dissipated by the capacitor is obtained as the average of the instantaneous power p(t) =
v(t)i(t). For time-harmonic signals the average power dissipated is obtained as
vC (t) = V0 cos ω t
iC (t) = −CV0 sin ω t
pC (t) = vC (t)iC (t) = −CV02 cos ω t sin ω t = −
Pavg = 0
CV02
sin 2ω t
2
Figure 2.10: Time-dependent voltage across and current through an inductor.
It is observed that instantaneous power dissipation is pulsating with power being absorbed for certain
period (+ve) and released back in the following time period (-ve). The average power dissipated is
therefore zero. Thus the power dissipated in an ideal capacitor is zero.
2.3.3
Inductance
The voltage across and current through a inductor are related in the time and frequency domain as
di(t)
dt
V (ω ) = jω LI(ω )
v(t) = L
+ jπ /2
=e
(2.32)
(2.33)
ω LI(ω )
(2.34)
The instantaneous sinusoidal voltage and current waveforms across an ideal inductor is shown in
Figure 2.10 where the voltage lags the current by a phase of 90◦ or π /2. This means the current
phasor is 90◦ ahead (in the counter-clockwise direction) to the voltage phasor at any instant in the
complex plane. The impedance of the inductor is therefore,
Z(ω ) =
V (ω )
= jω L
I(ω )
The impedance is purely reactive with positive reactance and no resistance (real part is zero).
The average power dissipated by the inductor is obtained as the average of he instantaneous power
p(t) = v(t)i(t). For time-harmonic signals the average power dissipated is obtained as
vL (t) = V0 cos ω t
V0
iL (t) = sin ω t
L
pL (t) = vL (t)iL (t) =
Pavg = 0
V02
V2
cos ω t sin ω t = 0 sin 2ω t
L
2L
2.3 Impedance
23
24
Chapter 2. Fundamental Concepts
Figure 2.11: Load impedance
It is again observed that instantaneous power dissipation is pulsating with power being absorbed
for certain period (+ve) and released back in the following time period (-ve). The average power
dissipated is therefore zero. Thus the power dissipated in an ideal inductor is zero.
Example 2.2 For a particular load shown in Figure 2.11,
a. What is the impedance Z(ω )?
b. What is the impedance at 900MHz?
c. Is it inductive or capacitive?
■
Figure 2.12: Realization of R, L and C for RF and microwave circuit applications.
2.3.4
a. The load shown is an inductor in series with a resitor in parallel with a capacitor. The impedance
can be obtained as
1
Z(ω ) = jω L + R||
jω C
R/( jω C)
= jω L +
R + 1/( jω C)
R
= jω L +
1 + jω RC
R(1 − jω RC)
= jω L +
1 + ω 2 R2C2
R
R2C
+
j
L
−
=
ω
1 + ω 2 R2C2
1 + ω 2 R2C2
b. To obtain the impedance at 900MHz, substituting the ω = 2π f = 5.652 × 109 rad/s leads to an
impedance of Z(ω ) = 3.03 + j39.4Ω.
c. The nature of load is inductive since reactance is positive.
■
Video link: Imepedance
High Frequency Parasitics
There are different ways of realizing physical components exhibiting the three fundamental electrical
properties and each realization has typically a limit in the frequency of usuage of that physical component to realize the circuit. Leaded components are for low-frequency applications such as sensors
and audio applications where frequencies are upto around 100MHz. The issue of high frequency
parasitics, an inherent property in physical components, limit the use of such components in RF applications. Surface Mount Devices (SMDs) not only provide an advantage of compact printed circuit
boards, but are more suited for high-frequency RF applications. The reason is the reduced high frequency parasitics. In System-on-chip (SoC) solutions with integration on complete RF circuits using
m complementary metal-oxide semiconductor technology (CMOS) resulting in Radio Frequency Integrated Circuits (RFICs), implement the realization of such components within the chip. Similarly,
microwave systems built using Microwave Monolithic Integrate Circuits (MMIC) that involve special
semiconductor substrates involve the realization of resistors, capacitors and inductors as part of package. MMIcs are used for very high frequency and high power applications. A summary of different
ways of realizations of R,L and C is shown in Figure 2.12.
High Frequency Parasitic effects is a phenomenon where physically realized resistors, capacitors
and inductors behave unlike their intended properties. A resistor behaves more than a resistor depending on the operating frequency. This is because the effects such as inductance of the leads and
the capacitance across the lead terminals have significant effect at high frequency, even though their
effects are not visible in low frequency. This limits the usable frequency range of such components.
Figure 2.13 shows the equivalent circuit of real, physically realized resistor. The lead inductance
and capacitance limit the use of resistor beyond a certain frequency point. It is noticed that for lowfrequency the effect of parasitics is insignificant. As an example, the frequency response shown in
Figure 2.14 shows that the resistor starts to behave like a capacitor beyond a certain frequency point
(which is dependent and can be determined from the parasitic inductance and capacitance).
Figure 2.15 shows the equivalent circuit of real, physically realized inductor. The resistance in the
coil used to realize the inductor and the capacitance between the leads limit the use of inductor beyond
a certain frequency point. As an example, the frequency response shown in Figure 2.16. Again the
low-frequency effect of parasitics is insignificant and the inductor behaves as expected. However
beyond certain frequency the inductor starts to behave like a capacitor. This frequency depends on
2.3 Impedance
25
26
Chapter 2. Fundamental Concepts
Figure 2.13: Ideal resistor and equivalent circuit of real, physically realized resistor.
Figure 2.16: Comparison of frequency response of an ideal and real inductor.
Figure 2.17: Ideal capacitor and equivalent circuit of real, physically realized capacitor.
Figure 2.14: Comparison of frequency response of an ideal and real resistor.
Figure 2.15: Ideal inductor and equivalent circuit of real, physically realized resistor.
Figure 2.18: Comparison of frequency response of an ideal and real capacitor.
2.3 Impedance
27
and hence can be determined from the parasitic capacitance.
Figure 2.17 shows the equivalent circuit of real, physically realized capacitor. The equivalent
series resistance (ESR) indicated as Rs and the equivalent series inductance (ESL) indicated as L p are
critical to determine the frequency point beyond which the capacitor behaves like a inductor! As an
example, the frequency response shown in Figure 2.18. Again the low-frequency effect of parasitics
is insignificant and the capacitor behaves as expected.
When it comes to selecting SMD components the parasitics/equivalent circuits parameters are essential to determine the suitability of using the component in realizing the RF circuit design. Datasheets
of components provided by vendors contain the parasitic values enabling designers to have an appropriate selection of components.
30
Chapter 3. Transmission Lines
3. Transmission Lines
Electromagnetic wave propagation is of two types:
1. Unbounded or radiation: The medium of propagation is air/free-space. EM energy propagates
in the form of spherical waves near the source (antenna) and at sufficiently far distances from
the source the energy propagates as planewaves. When air is the medium, the phase velocity of
the wave is equal to the speed of light.
2. Bounded or Guided: The medium of propagation is a material (typically a dielectric material
and/or air. The speed of propagation is less than or equal to the speed of light in air. Guided
wave propagation occurs in transmission lines and waveguides that carry EM energy from one
point to another.
Figure 3.1 shows the example of what is called an array antenna with a feed network. The 16element array antenna radiates EM energy into air as unbounded radiation. From the source to the individual elements the power is distributed through a feed network. Signal/RF power flows as bounded
waves essentially distributing the power as it flows along the network.
3.1
Figure 3.1: Unbounded(or radiation) and bounded (or guided) wave propagation.
What is a Transmission Line?
A transmission line is one that carries RF power from one point of RF system to another. It can then
simply be represented as shown in Figure 3.2 where the transmission line carries RF power from
source to the load. Note that the source has a source resistance of Rs and the load is resistive (as an
example) indicated as RL . For a transmission line atleast two conductors, typically carrying current
in opposite directions is necessary.
The electromagnetic energy propagates along the transmission line as certain modes. These modes
have certain characteristics for the electric and magnetic fields as they propagate along the line. Of
particular interest is a special type of mode called the Transverse Electromagnetic (TEM) mode. This
particular mode is a unique mode with no component of the electric and magnetic fields in the direction of propagation along the line. Both the electric and magnetic fields lie on the plane transverse
to the direction of propagation. For instance if the transmission line is aligned along the z−axis the
electric field will be of the form ⃗E(x, y, z,t) = Ex (x, y, z,t)x̂ + Ey (x, y, z,t)ŷ having no Ez component.
⃗ y, z,t) = Hx (x, y, z,t)x̂ + Hy (x, y, z,t)ŷ having no Hz
Similarly the magnetic field is of the form, H(x,
component.
A simple two-wire transmission line is illustrated in Figure 3.3 where the distribution of the elec-
Figure 3.2: Symbolic representation of a transmission line that carries power from the source and
delivers to the load impedance.
3.1 What is a Transmission Line?
31
32
Chapter 3. Transmission Lines
Figure 3.3: Two wire transmission line indicating the TEM mode with the electric and magnetic
fields and the corresponding voltage and current.
tric (solid arrow) and magnetic fields (dashed arrow) for the TEM mode is shown. The direction of
⃗ which is coming out of the plane of the paper in the +z direction. For such a
power flow is ⃗E × H
TEM mode, voltage across the two conductors v(z,t) and current through the conductors i(z,t) can be
obtained from the electric and magnetic fields.
v(z,t) = −
Z C2
I
i(z,t) =
C
C1
⃗Et (x, y, z,t) · d⃗l
Figure 3.4: Shielded Twisted pair cable.Source:Internet
⃗ t (x, y, z,t) · d⃗l
H
where C1 and C2 are two points in the two conductors at a particular location z and C a closed contour around any one of the two conductors at that location z. The current one conductor is in same
magnitude but opposite in direction compared to the other other.
⃗ y, z,t)) to circuital quantiThe TEM mode, allows to reduce the field quantities (⃗E(x, y, z,t), H(x,
ties voltages and current (v(z,t), i(z,t)) due to the transverse nature of the fields. It is then sufficient
to characterize the behaviour of the transmission line directly in terms of the voltages and currents
rather than the fields.
3.1.1
Examples of Transmission lines
Some common transmission line used in high frequency applications are presented in this section.
Figure 3.4 shows a twisted pair where a simple two wire transmission line is twisted. The twisting
improves the immunity to external noise/interference. The cat-5 cable used for wired internet access
is example of twisted pair. Hainv both positive and negative current carrying conductors, a two-wire
line is a balanced transmission line.
Figure 3.5 shows a coaxial cable. A coaxial cable is what is called as an unbalanced transmission
line where the inner conductor is the signal conductor and outer conductor (shield) is the ground.
Such cable should be familiar commonly used for broadband TV transmission.
Figure 3.6 shows a microstrip transmission line that consists of a copper trace as a conductor on
a dielectric material called the substrate. The substrate has copper layer in the bottom that serves as
the ground conductor. Such microstrip transmission lines are widely used in printed circuit boards for
high speed digital signals. The popular FR-4 PCB core serves as the substrate/dielectric material. A
microstrip line is an unbalanced line.
Figure 3.7 shows a stripline that consists of a copper trace as a conductor that is embedded inside
(unlike the microstrip line) the dielectric material/substrate. Such striplines are widely used in multilayered printed circuit boards where the high speed digital signal traces are sandwiched between the
copper ground planes. A stripline having signal conductor and ground is an unbalanced line.
Figure 3.8 shows a co-planar waveguide (CPWG) that consists of a copper trace as a conductor
over the dielectric material/substrate similar to microstrip. However, the ground conductor is on the
same layer as the signal conductor. Such CPWGs are widely used in RF PCB modules for bluetooth,
Zigbee and WiFi devices. A CPWG having signal conductor and ground is also an unbalanced line.
Figure 3.5: Coaxial cable.Source:Internet
Figure 3.6: Microstrip Transmission Line.Source:Internet
Figure 3.7: Stripline Transmission Line.Source:Internet
3.2 Transmission Line Theory
33
34
Chapter 3. Transmission Lines
Figure 3.8: Coplanar waveguide transmission line.Source:Internet
(a) DC Voltage source
(b) AC Voltage source
Figure 3.9: Transmission lines fed by DC and AC voltages
3.2
Figure 3.10: Effects of propagation delay in a transmission line.
Transmission Line Theory
Consider a transmission line with two conductors fed by DC supply and an AC supply (with frequency
f0 ) as shown in Figure 3.9. The voltage at the input and output ends of the transmission be VA and VB
respectively. For the case of line fed by a DC supply as shown Figure 3.9(a), the voltages and VA = VB
at any time instant. However, this is not the case when a AC supply is the source. In the case of a AC
supply, VA ̸= VB due to the physical length of the transmission line and depends on the frequency of
the AC supply. The reason for voltages to be different along different points in the line at any time
instant is due to the propagation delay in the voltage signal as the electromagnetic energy propagates
through the transmission line with a certain phase velocity. The change in the voltage at the source
end does not immediately reflect at the load end. It takes certain time for the signal to reach the load
end. The time taken depends on the electrical length rather than the physical length. Electrical length
is the physical length in terms of the wavelength of the signal. Depending on the physical length, l and
frequency of operation and therefore the wavelength of the signal λ , transmission lines are classified
as
1. Electrically short transmission lines when l << λ and
2. long transmission lines when l > λ /10
Thus a transmission line of certain fixed length l can appear electrically small for a low frequency
signal but appear as electrically large for a high frequency signal.
Consider a transmission line of length l as shown in Figure 3.10. The line is excited/fed by a
sinusoidal voltage source V0 sin ω0t with a certain frequency f0 chosen such that the wavelength of the
signal in the transmission line is equal to the length of the transmission line. Note that the wavelength
in the line is dependent on the frequency and the phase velocity as given by eq. 1.1. The voltage along
the line z at a particular time instant is shown in Figure 3.10 as one full sinusoidal cycle indicating
the length of the transmission line to be indeed one wavelength. The voltage distribution along the
line as shown in Figure 3.10 will be the case under special conditions on the source resistance Rs
and load resistance RL which will be discussed later in this section. The difference in the phase of
the voltage at the source end point A and at point B which is λ /4 distance away from A will be 90◦
with the voltage signal at B lagging the voltage signal at A. A physical distance λ /4 corresponds to
a phase shift of π /2 radians. The voltage at the two points A and B when viewed across time is also
shown in Figure 3.10. Clearly the signal at B appears later in time than at A by a time delay of τd .
The propagation time depends on the phase velocity of the signal in the bounded transmission line as
well as the distance of point B from A, lB .
τd =
lB
vp
(3.1)
For electrically short transmission lines the total propagation delay τd << T = 1f . Even though
the line is physically short, at high frequency, the transmission line appears electrically long (length
in terms of wavelengths) since when frequency is high the wavelength is small.
3.2.1
Phase Velocity
Voltage along a transmission line is a function of both space and time. The voltage at a particular
frequency f is given as
v(t) = V0 e∓α z sin(ω t ∓ β z)
(3.2)
where
α , Attenuation Constant represents the attenuation (loss in amplitude) in the signal as it propagates
along the transmission line. Units or Nepers or Np/m which will be seen in detail in Sec 3.2.4.
β , Wave number captures the space dependence and is related to the wavelength of the signal in the
transmission line. Units of wave number is rad/m or simply m−1 .
ω , Angular frequency captures the time dependence and is related to the time period of the signal.
Units of angular frequency is rad/s.
V0 , Amplitude is the peak voltage (not the RMS voltage) of the signal. Units are V.
3.2 Transmission Line Theory
35
36
Chapter 3. Transmission Lines
The ± in eq. 3.2 denotes two possible solutions representing +z and −z travelling waves and in fact
this solution will be later derived in Sec 3.2.2. Phase velocity v p is the velocity with which a point
with certain phase moves along the transmission line as time evolves. It is given as
vp =
ω
β
(3.3)
Exercise 3.1 Derive the expression for phase velocity shown in eq. 3.3 using the solution for the
voltage wave given in eq. 3.2 by setting the phase or equivalently the argument of sine term viz.,
ω t − β z to be constant. Hint: Velocity is dz/dt.
■
The phase velocity depends on the electrical properties of the material used in the transmission
line. The electrical properties are the permittivity ε = εr ε0 and the permeability µ = µr µ0 of the
material1 . For a wave propagating in the TEM mode, in a material medium with permittivity ε and
permeability µ , the phase velocity is given as
1
c
vp = λ f = √
=√
εµ
εr µr
(3.4)
The phase velocity of plane-wave in free-space (speed of light) is c = √ε10 µ0 and v p ≤ c. As
a consequence, for any signal with a specific frequency, the wavelength in the transmission line is
different and lower than the wavelength in free-space.
3.2.2
Telegrapher’s Equation
In a long transmission line, there is a voltage difference across any two points on the line at any
instance of time. The transmission line is to be treated as distributed element and the voltages v(t, z)
and currents i(t, z) are functions of space (distance along the line) and time. Time-harmonic signal
representation removes the time dependence and the voltage and currents are represented as function
of space alone as V (z) and I(z) respectively. The time-domain signal is recovered as
v(t, z) = ℜe{V (z)e jω t }
i(t, z) = ℜe{I(z)e
jω t
}
With such phasor representation the time dependence is absorbed and the line voltage V (z) and
current I(z) are functions of space z alone. z represents the point along the length of the transmission
line. To capture the voltage drop across the line, the line is divided into small sections of length
∆z as shown in Figure 3.11. For any section of length ∆z at a location z, the voltage at the input
and output section is V (z) and V (z + ∆z) respectively. Similarly the current flowing into the section
and flowing out of the section is I(z) and I(z + ∆z) respectively. Each section consists of resistance
R1 , R2 , inductance L1 , L2 , conductance G and capacitance C. R1 and R2 represents the resistance
of the two conductors that captures the ohmic loss due to the finite conductivity of the conductors
that the transmission line is made of. L1 and L2 represent the inductance of the two conductors2 .
Capacitance C represents the capacitance between the two conductors3 . Conductance G represents
the dielectric losses in the medium between the two conductors that form the transmission line. The
circuit representation of each section of the transmission line can be equivalently represented in a
compact form as shown in Figure 3.12. This equivalent circuit forms the basis of obtaining the
1 Permittivity, Permeability and Conductivity are covered in TLM1006. Refer to the lecture material to refresh those
topics.
2A small piece of wire has certain inductance called partial inductance even when the wire is not wound as a coil. This
partial inductance opposes any abrupt change in the flowing current
3 Similar to a parallel plate capacitor, just that the two conductors are a wire in the case of a transmission line.
Figure 3.11: A transmission line section broken down into smaller sections of length ∆z to analyze
the distributed parameters effects.
voltage and current relationships in the section of a transmission line first and then in the over-all
transmission line.
By defining the per-unit-length parameters R′ , L′ ,C′ and G′ as shown in Table 3.1, each section
of a transmission line is approximated as an equivalent circuit as shown in Figure 3.13. Note that R′
is the resistance per unit length (in Ω/m) and R′ ∆z is the resistance (in Ω) of a section of length ∆z.
Applying Kirchhoff’s voltage law for the generic equivalent circuit in Figure 3.13
V (z) −V (z + ∆z) = I(z)(R′ ∆z + jω L′ ∆z)
V (z) −V (z + ∆z)
⇒
= I(z)(R′ + jω L′ )
∆z
dV (z)
⇒−
= (R′ + jω L′ )I(z)
dz
(3.5)
(3.6)
(3.7)
Applying Kirchhoff’s current law:
I(z) − I(z + ∆z) = V (z + ∆z)(G′ ∆z + jω C′ ∆z)
I(z) − I(z + ∆z)
= V (z + ∆z)(G′ + jω C′ )
⇒
∆z
dI(z)
⇒−
= (G′ + jω C′ )V (z)
dz
(3.8)
(3.9)
(3.10)
Eliminating current I(z) from eq. 3.7 and eq. 3.10,
d 2V (z)
= (R′ + jω L′ )(G′ + jω C′ )V (z)
dz2
= γ 2V (z)
γ2
(R′ +
jω L′ )(G′ +
(3.11)
(3.12)
jω C′ ).
Eq. 3.12 is called the Telegrapher’s equation and is in fact a
where
=
one-dimensional wave equation. It is well known that the solution of such a one-dimensional wave
equation is of the form
V (z) = V + e−γ z +V − eγ z
(3.13)
3.2 Transmission Line Theory
37
38
Chapter 3. Transmission Lines
From the solution for voltage as in eq. 3.13 using eq. 3.7 the solution for current is obtained as
1
dV (z)
R′ + jω L′ dz
γ
= ′
(V + e−γ z −V − eγ z )
R + j ω L′
s
G′ + jω C′ + −γ z
=
V e −V − eγ z
′
′
R + jω L
1
=
V + e−γ z −V − eγ z
Z0
I(z) = −
Figure 3.12: Two circuits are equivalent as far as voltage and current at input and output terminals
are concerned.
(3.16)
(3.17)
The voltage and current at any point z on the line are then given as
V (z) = V + e−γ z +V − eγ z
I(z) = I + e−γ z − I − eγ z
V + −γ z V − γ z
=
e −
e
Z0
Z0
3.2.3
Figure 3.13: Equivalent circuit of each section of transmission line.
Exercise 3.2 Show that the expression for voltage along the transmission line V (z) given in
eq. 3.13 is indeed a solution of the Telegrapher’s given by eq. 3.12.
γ = α + jβ =
p
(R′ + jω L′ )(G′ + jω C′ )
Z0 =
Z0 ̸=
α = ℜe{γ } is the attenuation constant in Np/m (discussed further in Sec 3.2.4 and β = ℑm{γ }
is the phase constant or the wavenumber in rad/m. In eq. 3.13 the V + e−γ z term corresponds to a
forward travelling wave and V − eγ z corresponds to a backward travelling wave. V + = |V + |∠ϕ + and
V − = |V − |∠ϕ − are in general the complex phasors of the forward and backward travelling waves
respectively, at z = 0 . The time domain solution for the voltage in the transmission line is then
R
∆z
Series
Resistance
length
unit
Ω/m
G′ =
G
∆z
Shunt
Conductance per unit
length
S/m
L′ =
L
∆z
Series
Inductance
length
unit
H/m
C′ =
C
∆z
Shunt
Capacitance per unit
length
F/m
per
per
V+
V−
=− −
+
I
I
(3.21)
V (z)
I(z)
(3.22)
hence Z0 is not a circuit component unlike a resistor. It is obtained from the per-unit-length parameters
as
s
R′ + j ω L ′
Z0 =
(3.23)
G′ + j ω C ′
(3.15)
3.2.4
R′ =
(3.20)
It is to be noted that
(3.14)
v(z,t) = ℜe{V (z)e jω t } = e−α z |V + | cos(ω t − β z + ϕ + ) + eα z |V − | cos(ω t + β z + ϕ − )
(3.19)
Characteristic Impedance
Eq. 3.16 shows the relationship between transmission line current I(z) and the forward and backward
travelling voltage waves in the line. The impedance like term Z0 has a special significance and is called
the characteristic impedance of the transmission line.Z0 is the ratio of forward travelling voltages and
currents.
■
γ is called the propagation constant and is a complex number of the form
(3.18)
Losses in Transmission Lines
The losses in the transmission line is captured by R′ and G′ which lead to power dissipation in the form
of Ohmic loss (I 2 R). Losses lead to attenuation of signal power as they propagate through the cable.
For a loss-less transmission line (ideal, R′ = 0 and G′ = 0), meaning there is no signal attenuation in
the line. Shown in Figure 3.14 is the voltage along a transmission line at a particular time snapshot.
The frequency is such that the 30cm line is 2 wavelengths long. The voltage amplitude at the input
end is 1V while that at the output end is 0.223V. The voltage wave traveling in the +z direction is
given as
v(z,t) = e−α z |V + | cos(ω t − β z + ϕ + )
Table 3.1: Per-unit-length parameters of a transmission line
V (z) = |V + |e jϕ
+
The |V + |e−α z is the envelope of the voltage signal (indicated by the dashed line in Figure 3.14). The
loss in the cable is given as
3.2 Transmission Line Theory
39
40
Chapter 3. Transmission Lines
parameters is
γ = α + jβ =
⇒α =0
√
β = ω L′C′
p
√
−ω 2 L′C′ = jω L′C′
(3.27)
(3.28)
(3.29)
Notice that α = 0 for a loss-less line meaning there is no attenuation in a loss-less transmission
line (eα z = 1). The phase velocity and characteristic impedance is
ω
1
=√
β
L′C′
r
L′
Z0 =
C′
vp =
(3.30)
(3.31)
The per-unit-length parameters depend on geometry and material used to realize the transmission
line. Empirical formulae and design tools and software are usually used to estimate the characteristic
impedance of the transmission line. Calculators are based on approximations. Better practice is to
verify using field or full-wave electromagnetic simulation tools.
Figure 3.14: Voltage along a lossy transmission line.
Lloss = −10 log10
2
Vout
Vout
= −20 log10
Vin
Vin2
Example 3.1 Per-unit-length inductance and capacitance of particular transmission line is 0.24
µ H/m and 96.4pF/m respectively. Assuming the per-unit-length resistance and conductance can be
ignored,
a) find the characteristic impedance and phase velocity of the line.
b) find the wavelength of a 2 GHz signal in the transmission line.
■
(3.24)
Notice the loss in dB is the negative of Gain (ratio of output power to input power). When there
are losses in the cable Vout < Vin hence the loss (in dB) is greater than zero. For the specific voltage
response shown in Figure 3.14,
s
r
R′ + jω L′
L′
Z0 =
≈
= 50Ω
G′ + j ω C ′
C′
1
vp = √
= 2 × 108 m/s
L′C′
v p 2 × 108
λ=
=
= 0.1m
f
2 × 109
Vin = |V (0)| = 1
Vout = |V (l)| = 0.223
Lloss = −10 log10
2
Vout
0.2232
= −10 log10
12
Vin2
= 13.034dB
■
Neper is an alternate unit instead of decibel, and is used to express attenuation in cables. Neper is
based on natural logarithm (i.e., loge ≡ lne ) and is defined as
Lloss = −10 log10
2
Vout
Vout
dB = − ln
Np
Vin
Vin2
1Np = 20 log10 e dB
≈ 8.868dB
(3.25)
(3.26)
For the example, the loss 13.034 dB in the current example corresponds to 1.5Np for a 30cm long
cable. The attenuation constant α that is the loss per unit meter is then α = 1.5
0.3 = 5 Np/m.
The finite conductivity of copper/metal used as conductor in the transmission line leads to resistive
loss R′ ̸= 0. The losses in the dielectric material used as insulators between the conductors leads to
G′ ̸= 0.
3.2.5
Loss-less transmission line
All transmission lines are lossy in reality.A loss-less transmission line with R′ = G′ = 0 is an ideal
special case useful for analysis. The propagation constant in this case in terms of the per-unit-length
3.3
Load Termination
The transmission line supports a forward traveling and backward traveling waves. The source at
the input end launches the forward traveling wave. However, depending on the load terminating the
transmission line a reflection can occur leading to backward traveling wave. To understand the level of
reflection due to a load impedance ZL at the end of the transmission line, it is convenient to define the
z-axis to start from the load with z = 0 being the location of the load, as shown in Figure 3.15. Note
that the characteristic impedance of the line is Z0 and the impedance looking into the transmission
line at a distance l from the load impedance i.e., at a point z = −l is represented as Zin (l). To find
Zin (l), we look at the gerenal voltage and current distribution on the line,
V (z) = V + e− jβ z +V − e jβ z
V + − jβ z V − jβ z
I(z) =
e
−
e
Z0
Z0
3.3 Load Termination
41
42
Figure 3.15: Transmission line terminated by a load impedance ZL .
Figure 3.16: Reflection coefficient as a function of distance along the line, Γ(l).
Right at the load impedance location, i.e., at z = 0, the voltage and current are related by the load
impedance ZL . Thus at z = 0,
reflection coefficient right at the load end is defined. Similarly, one can define the reflection coefficient
defined at the distance l from the load as illustrated in Figure 3.16 in terms of the input impedance
Zin (l) as
V (0) = I(0)ZL
1
⇒ V +V − = (V + −V − )ZL
Z0
V − ZL − Z0
⇒ Γ(0) = + =
V
ZL + Z0
+
(3.32)
V − ZL − Z0
=
(3.37)
V + ZL + Z0
−
−
j
β
l
V e
Γin = Γ(l) = + jβ l = ΓL e−2 jβ l
(3.38)
V e
ΓL is the load reflection coefficient and Γin is the input reflection coefficient at distance l from the
load. It is to be noticed that the magnitude of reflection coefficient remains the same along a lossless
transmission line. It is the phase that changes with the distance along the line. Thus, the reflection
coefficient when viewed in the complex place, moving towards the generator (or source) from the
load by a distance l is equivalent to clockwise rotation along the circle of radius |Γin | = |ΓL | by an
angle of 2β l(rad). This is illustrated in Figure 3.17. The reflection coefficient at an arbitrary distance
l, Γ( l) in terms of the input impedance at z = −l, Zin (l) is given as
ΓL = Γ(0) =
(3.33)
(3.34)
Γ(l) is the reflection coefficient defined as ratio of reflected and incident voltages. The impedance
at z = −l is
Zin (l) =
V (−l)
I(−l)
V + e jβ l +V − e− jβ l
Z0
V + e jβ l −V − e− jβ l
e jβ l + Γ(0)e− jβ l
Z0
= jβ l
e − Γ(0)e− jβ l
=
==
1 + Γ(0)e− j2β l
Z0
1 − Γ(0)e− j2β l
Γin = Γ(l) =
(3.35)
Zin (l) = Z0
ZL + jZ0 tan β l
Z0 + jZL tan β l
3.3.2
Matched Load
A matched load is a special load termination when the load impedance is the same as the characteristic
impedance of the transmission line as shown in Figure 3.18. Thus ZL = Z0 and with this condition,
eq. 3.36 shows that Zin (l) = Z0 a constant and is independent of the length of the line l. By eq. 3.39,
the reflection coefficient for the matched case is then Γ(l) = 0. This means that there is no backward
wave or no reflection back as expected for a matched load. Figure 3.19 shows the voltage distribution
of the forward and backward traveling voltages in the transmission line terminated by a matched load.
As seen, the reflected/backward traveling waves is zero and the input impedance is constant all along
the transmission line, being equal to the characteristic impedance of the line.
3.3.3
Short Circuit Load
A short circuit load is another special case of load termination when the load impedance is a short
circuit ZL = 0 as shown in Figure 3.20. Under this condition, using eq. 3.36 and eq. 3.39 we get
Eq. 3.36 is used to find the input impedance looking into the transmission line at any arbitrary distance
l from the load end with ZL as the terminating impedance. Note that with l = 0 in eq. 3.36, Zin (0) = ZL
Exercise 3.3 Derive the relationship between Zin (l), load impedance ZL and the length of the
line l shown in eq. 3.36 using the reflection coefficient at the load end shown in eq. 3.34 and the
■
expression for Zin (l) in terms of the reflection coefficient at the load shown in eq. 3.35.
is equal to the load impedance, i.e., Zin (λ /2) = ZL
■
Reflection Coefficient
As discussed in the previous section, Γ(l) is the complex reflection coefficient in the transmission line
representing the ratio of the backward to forward traveling voltage wave amplitudes. In eq. 3.34 the
(3.39)
Invert eq. 3.39 and derive an expression for Zin for a given reflection coefficient. Note that since
the transformation in eq. 3.39 is unique, the unique inverse is possible.
■
(3.36)
Exercise 3.4 Using eq. 3.36 show that when the line is half-wavelength long, the input impedance
Zin (l) − Z0
Zin (l) + Z0
Exercise 3.5 Using eq. 3.39 one can obtain the reflection coefficient Γin given an impedance Zin .
The term β l is called the electrical length of the cable since it is a factor of physical length in terms
of the wavelength of the signal in the transmission line. Using eq. 3.34 in eq. 3.35, the expression for
Zin (l) is obtained as
3.3.1
Chapter 3. Transmission Lines
Zin (l) = jZ0 tan β l
ΓL = Γ( 0) = −1
(3.40)
(3.41)
3.3 Load Termination
43
44
Chapter 3. Transmission Lines
Figure 3.20: Transmission line terminated by a short circuit load RL = 0.
Figure 3.17: Rotation of load reflection coefficient in the complex plane by 2β l in the clockwise
direction.
Figure 3.21: Voltage response and the impedance along the line of a short-circuit terminated transmission line.
Notice that Zin (l) is a function of the length of the line l (unlike the case of a matched circuit).
The reflection coefficient ΓL = −1 means that there is complete reflection and inversion of the input
forward traveling wave due to the short circuited load. Figure 3.21 shows the voltage distribution of
the forward and backward traveling voltages in the transmission line terminated by a short-circuit. The
addition of reflected/backward traveling waves and incident/forward traveling wave create standing
waves on the transmission line with a node (voltage fixed at zero) at the load end. From eq. 3.40, the
input impedance is inductive till β l < π /2 (since 0 < tan θ < ∞ for 0 < θ < π /2). For longer lengths
when π /2 < β l < π , the impedance is capacitive. The trend in impedance repeats itself for every
β l = nπ /2. The length l corresponding to β l = π /2 is l = λ /4. Thus the short circuit at the load end
poses an impedance that swings between being inductive and capacitive for every step of λ /4 from
the load end.
Figure 3.18: Transmission line terminated by a matched load RL = Z0 .
3.3.4
Open Circuit Load
An open circuit load is another special case of load termination when the load impedance is a short
circuit ZL = ∞ as shown in Figure 3.22. Under this condition, using eq. 3.36 and eq. 3.39 we get
Zin (l) = − jZ0 cot β l
ΓL = Γ(0) = +1
Figure 3.19: Voltage response and the impedance along the line of a matched transmission line.
(3.42)
(3.43)
Notice that Zin (l) is again a function of the length of the line l (unlike the case of a matched circuit).
The reflection coefficient ΓL = +1 means that there is complete reflection of the input forward traveling wave due to the open circuit at load. Figure 3.23 shows the voltage distribution of the forward
and backward traveling voltages in the transmission line terminated by a open-circuit. The addition
of reflected/backward traveling waves and incident/forward traveling wave create standing waves on
the transmission line with a anti-node (voltage fixed at twice the incident voltage magnitude) at the
load end. From eq. 3.42, the input impedance is capacitive till β l < π /2 (since −∞ < cot θ < 0 for
0 < θ < π /2). For longer lengths when π /2 < β l < π , the impedance is inductive. The trend in
impedance repeats itself for every β l = nπ /2. The length l corresponding to β l = π /2 is l = λ /4.
3.3 Load Termination
45
46
Chapter 3. Transmission Lines
Figure 3.22: Transmission line terminated by a open circuit load RL = ∞.
Figure 3.24: Voltage Standing Wave Ratio.
Figure 3.23: Voltage response and the impedance along the line of a short-circuit terminated transmission line.
Thus the open circuit at the load end poses an impedance that initially appears capacitive and swings
between being capacitive and inductive for every step of λ /4 from the load end.
3.3.5
VSWR
Reflection coefficient is a complex parameter that characterizes the amount of reflection of the incident voltage signal due to a load. An alternate parameter is the VSWR, a real quantity that signifies
the amount of reflection as well. It is the ratio of the maximum to minimum voltage (incident and
any reflected voltage) across the line due to any arbitrary load impedance termination. In terms of the
reflection coefficient, VSWR is defined as
max |V (z)| 1 + |Γ|
VSWR =
=
min |V (z)|
1 − |Γ|
(3.44)
−1 ≤ |Γ| ≤ +1 and 1 ≤ VSWR ≤ ∞ are the possible range of reflection coefficient and VSWR. A
VSWR = 1 ≡ |Γ| = 0 indicates matched load condition. The magnitude of Reflection Coefficient is
obtained from the VSWR as
|Γ| =
VSWR − 1
VSWR + 1
(3.45)
VSWR of 2 corresponds to a reflection coefficient magnitude of |Γ| = 0.3162.
Reflection coefficient is often expressed in dB
Γ|dB = 20 log10 |Γ|
(3.46)
(3.47)
Note that the reflection coefficient of -10dB (|Γ| = 0.3162) corresponds to VSWR = 2. Whenever
there is an impedance discontinuity (mismatch) along a RF circuit, there is partly a power reflected
Figure 3.25: Reflected and accepted power.
back to the source and partly power accepted to the load (next section). The reflected power Pref and
accepted power Pacc is defined as
Pref = |Γ|2 Pin
(3.48)
Pacc = (1 − |Γ|2 )Pin
(3.49)
For conditions of matched load (|Γ| = 0), Pacc = Pin , Pref = 0. In terms of the forward and backward
traveling voltages the incident and reflected power is
|V + |2
2Z0
|V − |2
|V + |2
−
Pref = P =
= |Γ|2
2Z0
2Z0
Pin = P+ =
(3.50)
(3.51)
where is P+ and P− are the forward and backward traveling power.
■ Example 3.2 The input impedance of a short circuited 50Ω coaxial cable of certain length was
measured to be capacitive with reactance of 25Ω at 1GHz.
a. What is the electrical length of the cable?
b. Given that the dielectric constant of Teflon used in the cable is 2.1, what is the physical length of
3.3 Load Termination
47
48
Chapter 3. Transmission Lines
To obtain the reflected power back to the source, we need to obtain the reflection coefficient at the
source end.
Zin − Z0
Zin + Z0
= 0.359 + j0.0016
Γ=
From the reflection coefficient the reflected power and accepted power is obtained as
Pin = 30dBm = 1W
Pref = |Γ|2 Pin
= 0.13W
Figure 3.26: Illustration for Example 3.3
Pacc = (1 − |Γ|2 )Pin
= 0.87W
the cable?
Given that the load is short circuited, using the input impedance given by eq. 3.40, one can find
the length of the line that provides the capacitive reactance i.e., Zin (l) = − j25Ω.
■
3.3.6
Why 50Ω?
50Ω reference impedance was selected from a trade-off between the lowest loss and maximum powerhandling dimension for an air line coaxial cable. The optimum ratio of the outer conductor to inner
conductor, for minimum attenuation in a coaxial structure with air as the dielectric, is 3.6. This
corresponds to an impedance, Z0 , of 77Ω. Although this yields the best performance from a loss
standpoint, it does not provide the maximum peak power handling before dielectric breakdown occurs.
Best power performance is achieved when the ratio of the outer conductor to inner conductor is
1.65. This corresponds to a Z0 of 30Ω. The geometric mean of 77Ω and 30Ω is approximately 50Ω.
Therefore, 50Ω, as a standard is a compromise between best attenuation performance and maximum
peak power handling in the coaxial cable.
3.3.7
Maximum Power Transfer
Consider a voltage source feeding a load as shown in Figure 3.27. The internal resistance of the
source is RS and the resistive load is represented as resistor Rin . Power delivered by the source (power
supplied) is
Zin (l) = jZ0 tan β l
Zin (l)
tan β l =
jZ0
− j25
=
j50
= −0.5
⇒ β l = 5.82 rad = 333.43◦
β l is the electrical length. Given that the dielectric material in the transmission line is teflon with
εr = 2.1, the physical length is computed by obtaining β .
2π f
ω
=
vp
vp
2π f √
=
εr
c
= 30.35m−1
5.82
l=
= 0.192m = 19.2cm
30.35
β=
PS =
■
■ Example 3.3 A 50Ω loss-less coaxial cable terminated by a load impedance of (75 + j40)Ω at a
particular frequency, is connected to a matched source with 30dBm power. The electrical length of
the cable at the measured frequency is 20◦ . What is
a) the power reflected back to the source and
b) the power accepted by the load
Using eq. 3.36, the input impedance at the source end is obtained as
ZL + jZ0 tan β l
Z0 + jZL tan β l
75 + j40 + j50 tan 20
= 50
50 + j(75 + j40) tan 20
= 106.1 + j0.382Ω
Zin (l) = Z0
VS2
RS + Rin
Power delivered to the load:
2
VS
Rin
PL =
RS + Rin
For maximum power transfer, Rin = RS . Under this condition, the maximum power delivered to
the load is then,
PL =
VS2
PS
=
4Rin
2
Figure 3.28 shows the power delivered to the resistive load as a function of the load resistance
when the source resistance is 50Ω. Notice that the maximum power is delivered to the load when Rin =
RS and only half the power supplied by the source is delivered to the load. In RF signal generators,
the power level setting set by the user indicates the power available from the supply P2S assuming that
the supply is connected to a 50Ω load.
3.3 Load Termination
49
50
Chapter 3. Transmission Lines
■ Example 3.4 1. A transistor has an input impedance of 25Ω which is to be matched to a 50Ω microstrip line at an operating frequency of 500MHz. Find the characteristic impedance of the quarterwave transformer.
2. The p.u.l inductance of the quarter wave transformer section is determined to be 235.8 nH/m. What
should be the p.u.l capacitance? Determine the physical length of the section.
Figure 3.27: Source with series resistance feeding a resistive load with equivalent resistance of Rin .
Since quarter-wave transformer needs to match 50Ω line to 25Ω transistor, the characteristic
impedance of the quarter-wavelength line should be
p
Zline = Zin ZL
√
= 50 × 25
= 35.35Ω
To find the per-unit-length capacitance,
r
L′
Zline =
C′
L′ = 235.8nH/m
L
C′ = 2
Zline
235.8 × 10−9
35.352
= 188.6pF/m
=
Figure 3.28: Power delivered to the load as a function of the load resistance.
Now that we know L′ and C′ , to find the physical length of the transformer, we find the phase
velocity first
Exercise 3.6 Derive the expressions for the power supplied by the source, delivered to the load
and the condition on maximum power transfer for a resistive load that is discussed above.
■
1
vp = √
L′C′
= 1.5 × 108 m/s
Exercise 3.7 Using eq. 3.36 show that when the line is quarter-wavelength long, the input impedance
√
is Zin (λ /4) = Z0 = Zin ZL .
■
λ
4
vp
=
4f
= 0.075 m
= 7.5 cm
l=
A matching network is used to match two different impedances to allow maximum power transfer.
Such a network is also called a impedance transformer or transformer. For resistive loads, a quarterwavelength long section of transmission line can be used as matching
√network as shown in Figure 3.29.
The choice of the characteristic impedance of the λ /4 line is Z0 = Rin RL .
■
3.4
Figure 3.29: A quarterwave transformer as a matching network to match a resistive load to a certain
source resistance.
Smith Chart
The relationship between the impedance and the reflection coefficient given in eq. 3.39 maps a particular impedance Zin at a distance l from the load end uniquely to a complex reflection coefficient Γin
(in the complex plane) and vice versa. Leveraging on the unique mapping between Zin and Γin the
need to perform the calculation based on eq. 3.39 can be eliminated by using a suitable chart where
given the reflection coefficient Γin the impedance Zin can be read directly or given an impedance Zin
the reflection coefficient Γin can be obtained directly by reading from the chart. Such a chart is called
a Smith Chart. In essence, a Smith Chart is simply a chart of the reflection coefficient in the complex
plane. A complex plane is one with x-axis denoting the real axis and the y-axis denotes the imaginary
3.4 Smith Chart
51
52
Chapter 3. Transmission Lines
Figure 3.31: Smith Chart simultaneously represents normalized impedances and reflection coefficient.
Figure 3.30: Overlay of Reflection Coefficient in the complex plane and the corresponding normalized impedance values in the Smith Chart.
axis. A reflection coefficient is denoted by a point with length from the origin being equal to the
magnitude of the reflection coefficient and the angle subtended by the line passing through the point
and origin with the real axis (x-axis) is the phase of the reflection coefficient. Thus a certain magnitude of reflection coefficient transforms to a circle with radius equal to the magnitude of the reflection
coefficient. In a Smith Chart however, instead of indicating the magnitude of reflection coefficient as
concentric circles, the reference curves (grids) denote the impedance curves themselves, giving the
ability to read the impedance values directly from the chart for any given value of (complex) reflection
coefficient. An overlay of both the concentric circles (denoting reflection coefficient) and impedance
curves is shown in Figure 3.30.
It is to be noted that the Smith chart is always normalized in impedance, typically with respect
to the characteristic impedance of the transmission line that is feeding the load. For example, if the
characteristic impedance of the transmission line is Z0 , and the load impedance is ZL , the reflection
coefficient is
ZL − Z0
ΓL = =
ZL + Z0
1 + ΓL
⇒ ZL = Z0
1 − ΓL
The Smith chart is normalized to a particular impedance in this case to the characteristic impedance
Z0 of the transmission line. Thus
ZL 1 + ΓL
zL =
=
Z0 1 − ΓL
The normalized impedance is in general zL = rL + jxL and being a ratio of impedance, is dimensionless (not Ω). Given a normalized impedance zL , the actual impedance ZL (in Ω) can be obtained or
recovered back by de-normalizing as ZL = Z0 zL = RL + jXL .
Figure 3.32: Transformation of the complex impedance plane into circles results in the Smith Chart.
Video link: Smith Chart - Introduction
Figure 3.31 shows typical impedance Smith chart or Z-chart along with the description of the
regions in the Smith chart that the positive and negative reactance of impedance map to, respectively.
The full circles in the Z-chart represent constant resistance curves and the arc segments represent constant reactance curve. The upper-half denotes the positive reactance (inductive load) while the lower
half denotes negative reactance (capacitive load). The location of three kinds of load in particular,
viz., a) Short-circuit load b) Normalization impedance load and c) open-circuit load is also indicated.
Figure 3.32 illustrates the transformation of the rectangular normalized impedance plane to the
corresponding circular regions in the Smith Chart. The complex transformation from normalized
impedance to reflection coefficient is a unique one-to-one mapping leading to be able to read the
impedance and reflection coefficients directly from the Smith Chart without having the need to use
3.4 Smith Chart
53
54
Chapter 3. Transmission Lines
eq. 3.39.
Video link: Smith Chart - Impedance Plane Mapping
Example 3.5 A transmission line with Z0 = 50Ω is terminated by the following load impedances.
Find the reflection coefficient in each case, indicate them in the complex plane and the smith chart.
■
a. ZL = 0 (short circuit)
b. ZL = ∞ (open circuit)
c. ZL = 50 Ω
d. ZL = (16.67 j16.67)Ω
e. ZL = (50 + j150) Ω
To find the complex reflection coefficient given the impedance, using eq. 3.39
ZL − Z0
ZL + Z0
0 − Z0
ΓL =
= −1
0 + Z0
ZL − Z0
ΓL = lim
=1
ZL →∞ ZL + Z0
50 − 50
ΓL =
=0
50 + 50
16.67 − j16.67 − 50
ΓL =
= 0.54∠221◦
16.67 + j16.67 + 50
50 + j150 − 50
ΓL =
= 0.83∠34◦
50 + j150 + 50
ΓL =
a.
b.
c.
d.
e.
Figure 3.33: Reflection coefficient of impedance values in the complex plane.
The reflection coefficient is plotted in the complex plane as shown in Figure 3.33.
Now, instead of using eq. 3.39 to find ΓL , the Smith Chart is used to plot the given impedances
directly.
ZL
Z0
0
zL =
= 0 + j0
50
zL = ∞ + j0
50
zL =
= 1 + j0
50
16.67 − j16.67
zL =
= 0.33 − j0.33
50
50 + j150
zL =
= 1 + j3
50
zL =
a.
b.
c.
d.
e.
Figure 3.34: Normalized Impedance plotted directly in Smith Chart.
The normalized values are plotted directly in the Smith Chart shown in Figure 3.34. Comparing
Figure 3.33 and Figure 3.34, it can be observed that the location of the different impedance points are
the same in both the charts. It is the grid lines that are different in the two charts.
■
3.4 Smith Chart
55
56
Chapter 3. Transmission Lines
Figure 3.35: Transformation of load impedance due to additional length of the transmission line.
Video link: Smith Chart - Example
3.4.1
Impedance Transformation of General Load
Consider the case of input impedance looking in to a tranmission line terminated by a certain load
impedance at a certain distance l as shown in Figure 3.35. The input impedance is given by eq. 3.36.
Alternatively, moving a distance along the line by l only changes the phase of the reflection coefficient
and not the magnitude, as seen in eq. 3.38. The movement of 2β l in the clockwise direction in needed
in the complex reflection coefficient plane (or equivalently the Smith Chart). This is then depicted
in Figure 3.36 where the movement from zL by an angle of 2β l in clockwise direction along a circle
with radius representing |ΓL | leads to the input impedance zin . The input impedance can then be read
directly from the Smith Chart.
Thus the sequence of steps to obtain the input impedance from the Smith Chart as an alternative
to using eq. 3.36 is summarized as follows:
1. Normalize load impedance to transmission line impedance zL = ZZL0
2. Identify/Locate zL = rL + jxL in Smith-chart that lies on the constant resistance curve (using rL )
and reactance curve (using xL )
3. Draw straight line from origin to that point
4. Note the angle with respect to the real axis. This angle is the phase of the reflection coefficient.
5. Draw a circle passing through the load impedance point
6. Move along the circle, by an angle twice the electrical length i.e., 2β l in the clockwise direction
7. The end point is the normalized input impedance, zin
8. Scale be characteristic impedance to obtain Zin = zin Z0
Note that the clockwise direction of rotation is necessary while moving towards the source end of the
transmission line from the load impedance. This is due to the fact that the phase of the reflection coefficient changes by a factor of −2β l as shown in eq. 3.38. Negative change in phase angle represents
movement along the clockwise direction in the complex plane. In the case of transforming a certain
reflection coefficient at the source end (looking into the load) to the reflection coefficient at the load
end ΓL , by eq. 3.38,
ΓL = Γin e+2 jβ l
Figure 3.36: Movement of load impedance in Smith Chart due to additional length of the transmission
line.
movement along the counter-clockwise direction in the complex plane. Thus, with reference to Figure. 3.35,
• a movement in clockwise direction is necessary while moving from the load towards source i.e.,
while either ΓL or ZL is given and one needs to obtain either Zin or Γin .
• a movement in the counter-clockwise direction is necessary while moving from the source
towards the load i.e., while either Γin or Zin is given and one needs to obtain either ZL or ΓL .
Video link: Smith Chart - Impedance Transformation
Example 3.6 A load impedance ZL = (30 + j60)Ω is connected to a 50Ω transmission line of
length 2cm operating at 2GHz. Find the input impedance assuming phase velocity is 50% the speed
of light.
■
There are 3 different ways of obtaining the input impedance.
• Method 1: Using impedance formula eq. 3.36 directly, i.e.,
(3.52)
Since the change in phase of the reflection coefficient is by a factor +2β l, the rotation has to be
in the counter-clockwise direction in the complex plane. Positive change in phase angle represents
Zin (l) = Z0
ZL + jZ0 tan β l
Z0 + jZL tan β l
• Method 2: Using reflection coefficient at load and using eq. 3.38 to find the reflection coeffi-
3.4 Smith Chart
57
58
Chapter 3. Transmission Lines
cient at the input and then the impedance
1 + Γin
, Γin = ΓL e−2 jβ l
1 − Γin
• Using the Smith Chart
All the three methods require obtaining the electrical length β l from the given facts in the question. One can obtain the β from the phase velocity v p .
Phase velocity, v p = 0.5c = 1.5 × 108 m/s
Phase constant, β = 2λπ = 2vπpf = 83.77m−1
Electrical length, β l = 1.675 (rad) ≈ 96◦
Zin (l) = Z0
• By Method 1
30 + j60 + j50 tan(1.6754)
50 + j(30 + j60) tan(1.6754)
= 14.7 − j26.7
Zin (l) = 50
• By Method 2
ΓL =
30 + j60 − 50
= 0.2 + j0.6
30 + j60 + 50
Figure 3.37: Illustration of transformation of load impedance due to the distance l from the load.
Γin = (0.2 + j0.6)e(−2 j×1.675) = −0.32 − j0.55
Zin = 50
1 + (−0.32 − j0.55)
= 14.7 − j26.7
1 − (−0.32 − j0.55)
• By Method 3 The normalized impedance is
zL =
ZL 30 + j60
=
= 0.6 + j1.2
Z0
50
and is identified as intersection of constant resistance circle r= 0.6 and constant reactance circle
x = 1.2 as shown in Figure 3.37. To find the angle to move in the clockwise direction,
Figure 3.38: Transformation of a short circuit into an open circuit and back to a short circuit
2β l = 2 × 96◦ = 192◦
Sweeping in the clockwise direction by this angle, leads to a point with normalized impedance,
Thus the short circuit transforms into a open circuit. This is also notices in the voltage and current
distributions along the line also shown indicated in Figure 3.38 as solid and dashed lines respectively.
For case b), when the transmission line length is λ /2 corresponds to an electrical length of β l = π .
2β l = 2π meaning one full-circle in the clockwise direction in the Smith chart. Thus the short circuit
transforms back into a short circuit. This is also notices in the voltage and current distributions along
the line also shown indicated in Figure 3.38 as solid and dashed lines respectively. The voltages and
currents at the input are exactly the same as how they look at the load end when the line length is λ /2.
Zin = 0.3 − j0.53
leading to a input impedance of
Zin = 50 × (0.3 − j0.53) = 15 − j26.5
Notice that all the three methods lead to the same result for the input impedance (as expected!).
Similarly Figure 3.39 shows the transformation of an open circuit load. Notice that at the load
end, for a short circuit, ΓL = +1 as indicated in the Smith Chart. The rotation in the Smith Chart is
similar to the above short circuit case. Thus a length of λ /4 is movement by half-a-circle and length
of λ /2 is a movement of one full-circle in the Smith Chart.
■
3.4.2
Impedance Transformation of Short Circuit and Open Circuit
We look into two special load conditions of short circuit and open circuit to understand how the load
transforms with distance l into the transmission line (towards the source) from the load. Figure 3.38
shows the transformation of the short circuit. Notice that at the load end, for a short circuit, ΓL = −1
as indicated in the Smith Chart. Two cases viz.,. a) when the length corresponds to λ /4 and b) when
the length corresponds to λ /2 is shown. For case a) the length of λ /4 corresponds to an electrical
length of β l = π /2. 2β l = π meaning one half-circle in the clockwise direction in the Smith chart.
3.5
Transient Signal Propagation
So far we have seen the time-harmonic signal propagation and the effects such a signal undergoes in a
transmission line. While time-harmonic signals are usually present RF systems for communications,
3.5 Transient Signal Propagation
59
60
Chapter 3. Transmission Lines
Figure 3.41: Voltages in a transmission line terminated by a matched load
Figure 3.39: Transformation of an open circuit into a short circuit and back to an open circuit
Figure 3.42: Transient source (Step signal) feeding a transmission lines that is terminated by a resistive load.
(a) Step voltage feeding a matched transmission line
(b) Equivalent circuit at the
source end
at the load end with a reflection coefficient of
Figure 3.40: Transient source (Step signal) feeding a transmission lines that is terminated by matched
load.
for high speed digital signals the transient signal propagation is necessary. For example, consider the
case of a transmission line terminated by matched load, being fed by a step signal vs (t) as shown
in Figure 3.40(a). We intend to analyze the propagation effects in the time domain (and not in the
frequency domain). At the source end of the transmission line, the signal source steps to a voltage
of V at time t = 0. Since the matched load terminated transmission line is having the characteristic
impedance Z0 which is the same as the internal resistance of the source Z0 , the voltage at the input end
of the transmission line is obtained based on the equivalent circuit at the input shown in Figure 3.40(b).
Due to the voltage divider the voltage at the input of the transmission line vin (t) is given as
vin (t) =
Z0
1
vS (t) = vS (t)
Z0 + Z0
2
(3.53)
This voltage at input does not immediately appear the load end due the finite propagation time tD of
the signal in the transmission line. The propagation time depends on the phase velocity and the length
of the line. Thus, the voltage at the load end remains zero until the step voltage propagates along the
line to reach the load end when t = tD . Thus,
ΓL =
RL − Z0
RL + Z0
This reflection leads to backward traveling signal that is a factor of the forward traveling signal
that reaches the load end. The reflection returns back to the source end. Since at the source end,
there is matching between the source impedance and the characteristic impedance of the line, the
reflected/backward traveling signal doesnot undergo any further reflection at the source end. Figure 3.43 shows response at the input and output ends of the transmission line under two different
cases of the load resistance viz., a) RL > Z0 or ΓL > 0 and b) RL < Z0 or ΓL < 0. In both the cases,
the step signal source of voltage V sees a voltage divider and at the input end of the transmission
line, the input voltage vin (t) steps to V /2. This signal take t = tD to reach the output end. However
at the output (unlike the previous case), there is a reflection of ΓL due to a non-matched termination.
The total voltage at the output is then the incident (forward traveling) and the reflected (backward
traveling) voltages. Thus the output voltage vout (t) steps to V2 (1 + ΓL ) after a propagation delay of
tD . The reflected voltage at the load end is ΓL V2 . This reflected voltage reaches back the source end
after additional propagation delay of tD . Thus at the input end, the voltage stays at V /2 only till this
reflection comes back i.e., till t = 2tD . The transient voltages at the source and load ends are shown
in Figure 3.43.
vout (t) = vin (t − tD )
where the propagation delay tD is given as
tD =
3.5.1
l
vp
Resistive Load
In the case of a general resistive load, having a mismatch at the load end as shown in Figure 3.42 is
more interesting than the matched load. When the load resistance resistance RL ̸= Z0 , reflection occur
Figure 3.43: Voltages in a transmission line terminated by arbitrary resistive load
3.5 Transient Signal Propagation
61
Figure 3.44: Voltages in a transmission line terminated by a) Short circuit and b) Open circuit load
3.5.2
Short circuit and Open circuit Load
As a special case, it is interesting to see the case of short circuit and open circuit loads. This is easier
to analyze since for a short circuit ΓL = −1 and for an open circuit ΓL = +1. For the short circuit
case, at the input end the voltage steps to V /2 and stays there only till t = 2tD . The reflection at load
end (being -1) cancels the input signal and the signal goes back to zero at the input end. At the output
end of the transmission line, the voltage remains zero for all t.
Similarly for the open circuit case, at the input end the voltage steps to V /2 and again stays there
only till t = 2tD . The reflection at load end (being +1) doubles (!) the input signal and the signal goes
to V at the input end (t ≥ 2tD ). At the output end of the transmission line, the voltage remains zero
till tD and steps to V for (t ≥ tD ).
64
Chapter 4. Network Theory
Figure 4.2: Typical RF blocks in a communication chain
4. Network Theory
Figure 4.3: Convention for port voltages and current for Z-parameters and Y-parameters
Where V and I are vectors of port voltages and current respectively, each of size (n × 1) where n is
the number of ports. Z is called the impedance matrix and is of size n × n for a n−port network. Note
that each element of V, I and Z are complex (and a function of frequency). For a two port network
V1
I1
Z11 Z12
=
Z21 Z22
V2
I2
A RF sub-system or block is treated as network with RF power flowing in and out of the block through
certain number of points. Such points where RF power flows in and out of the RF system are called
ports. Two conductors are necessary to make one single port and essentially ports are connected
(interfaced) to the external systems through transmission lines. The network representation of the
RF block called the network parameters are able to characterize the behavior of the block while the
details of internal circuits/mechanism remain invisible. Thus the system is treated as a black box with
the network parameters providing sufficient knowledge about the system in terms of the input and
output characteristics.
Depending on the number of ports, RF systems can be either 1-port or 2-port or multi-port networks. For example Figure ?? shows a typical communication chain both at the transmitter and the
receiver. The antenna is a single port device. The amplifier and filter are 2-port devices. The mixer
is a 3-port device. The network parameters are a function of frequency, being defined in the timeharmonic signals.
4.1
The elements of impedance matrix are obtained using open-circuit conditions
Z12 =
V1
I2
I1 =0
The condition that I1 = 0 implies port 1 is under open-circuit condition leading to current in port 1 to
be zero. For a general n− port network,
Z11 Z12 Z13 . . . Z1n
V1
I1
V2 Z21 Z22 Z23 . . . Z2n I2
.. = ..
..
.. . .
. .
. .
. .. ..
.
.
VN
Zn1 Zn2 Zn3 . . . Znn IN
Z-Parameters
where
Coming from low-frequency electric circuit network parameters, the Z-parameters is a type of network
parameters that relates the port voltages to the incoming currents in each of the ports. Figure 4.3 shows
the convention used to define the port voltages and currents. It is important to note the polarity and
the direction of the current. The Z-parameters relate port voltages to the port currents
Zmn =
Vm
In
Ik =0 ( for k̸=m)
For a passive network/circuit (with no active sources) the impedance matrix is a symmetric matrix
V=ZI
i.e.,
Zmn = Znm ,
4.2
m ̸= n
Y-Parameters
The Y-parameters are similar to Z-parameters except that the Y-parameters relate the port current to
the port voltages as
Figure 4.1: RF block as a block box with interface to outside world through ports
I = Z−1 V = Y V
4.2 Y-Parameters
65
66
Chapter 4. Network Theory
Figure 4.5: Incoming and outgoing power waves instead of port voltages and currents
Figure 4.4: π − network
4.3
where Y is the admittance matrix and is the inverse of the impedance matrix,
At high frequency open circuit and short circuit is difficult to realize. Hence, accurate measurement
of Z- and Y- parameters are limited in frequency due to the limitations of the necessary load terminations. Instead of port voltages and currents, incident and reflected power waves are easier to measure.
Thus scattering parameters or S-parameters are defined that related the outgoing power waves to the
incoming power waves in each port. Figure 4.5 illustrates the incoming power waves an at port n and
the corresponding outgoing power wave bn . an and bn are the normalized power waves that are related
to the port voltages and currents as
Y = Z−1
For a 2-port network,
I1
V1
Y
Y
= 11 12
Y21 Y22 V2
I2
Elements of impedance matrix are obtained using short-circuit conditions as
Y12 =
I1
V2
V1 =0
where the condition V1 = 0 implies that port 1 is under short circuit leading to voltage at port 1 to be
zero. In general for a n− port network,
I1
Y11 Y12 Y13 . . . Y1n
V1
I2 Y21 Y22 Y23 . . . Y2n V2
.. = ..
..
.. . .
. .
. .
. .. ..
.
.
IN
Yn1 Yn2 Yn3 . . . Ynn VN
with
Ymn =
■
Im
Vn
Vk =0 ( for k̸=m)
Example 4.1 Find the impedance and admittance matrix of the 2-port network shown in Figure 4.4.
Such a network is also called the π - network
V1
ZA (ZB + ZC )
Z11 =
= ZA ||(ZB + ZC ) =
I1 I2 =0
ZA + ZB + ZC
Z12 =
V1
I2
S-Parameters
1
an = √ (Vn + Z0 In )
2 Z0
1
bn = √ (Vn − Z0 In )
2 Z0
when I1 = 0
ZA
V1 =
VAB
ZA + ZB
(4.2)
an and bn are dependent on Z0 . The S-parameters are therefore said to be referenced to a common
impedance Z0 for all the ports typically1 . The usual reference impedance is 50Ω. The port voltages
and currents are then related to the normalized power waves an and bn as
p
Vn = Vn+ +Vn− = Z0 In+ − Z0 In− = Z0 (an + bn )
(4.3)
1 +
1
+
−
−
In = In + In = (Vn −Vn ) = √ (an − bn )
(4.4)
Z0
Z0
In terms of the forward traveling and backward traveling voltages, the normalized power waves are
V+
an = √n
Z0
Vn−
bn = √
Z0
I1 =0
(4.1)
(4.5)
(4.6)
S-parameters being related to a power waves, characterize the power flow into and out of the
system. For example, the incident and reflected power at port 1 is,
1 |V1+ |2 |a1 |2
=
2 Z0
2
1 |V1− |2 |b1 |2
=
Pref =
2 Z0
2
Pinc =
VAB = I2 (ZC ||(ZA + ZB ))
ZA
ZA ZC
(ZC ||(ZA + ZB )) =
ZA + ZB
ZA + ZB + ZC
Similarly one can show that (leave it as an exercise),
ZA ZC
⇒ Z21 =
ZA + ZB + ZC
ZC (ZA + ZB )
Z21 =
ZA + ZB + ZC
⇒ Z12 =
(4.7)
(4.8)
The total power at port 1 in terms of a1 and b1 is then,
1
1
P1 = ℜe{V1 I1∗ } = Pinc − Pref =
(|V + |2 − |V1− |2 )
2
2Z0 1
1
= (|a1 |2 − |b1 |2 )
2
■
1 Generalized
S-parameters are those where the reference impedance of individual port is different
(4.9)
4.3 S-Parameters
67
68
Chapter 4. Network Theory
Figure 4.7: Reflection and Transmission through the network, due to excitation at port 1
VSWR =
Figure 4.6: Obtaining S11 and S21 by terminating port 2 with matched load and obtaining S22 and S12
by terminating port 1 with matched load
S21 is the forward (port 1 to port 2) transmission coefficient (again under matched output). This is
illustrated in Figure 4.7.
S-parameters or scattering parameters related the out-going power waves to the incoming power
waves. For a 2-port network,
b1
a1
S
S
= 11 12
(4.10)
S21 S22
b2
a2
b1
S11 =
a1
a2 =0
b2
S21 =
a1
a2 =0
b2
a2
a1 =0
b1
a2
a1 =0
S22 =
S12 =
Ptr = |b2 |2 =
4.3.2
where each term is obtained as
: Input reflection coefficient
(4.11)
: Forward transmission coefficient
(4.12)
: Output reflection coefficient
(4.13)
: Backward transmission coefficient
(4.14)
Meaning of S-parameters
S-parameters are related to the reflection and transmission coefficients. The relation can be better
understood by looking into the method of obtaining S11 and S21 as shown in Figure 4.6. A matched
source (with internal impedance Z0 ) is connected to port 1, while port 2 is terminated by matched load.
Simularly for S12 and S22 , port 2 is the excitation (source) port and port 1 is terminated by matched
load. Under the matched load conditions, S11 is directly the reflection coefficient
Pref = |S11 |2 Pinc
If S11 = 0, then all the input power is delivered to port 1 of network and no power is reflected back
at port 1. Similar to the case of reflection coefficient, one can define the VSWR at port 1 in terms of
S11 as
|b2 |2
|a1 |2 = |S21 |2 Pinc
|a1 |2
Input and Output impedance
Since the Sii represents reflection coefficient at port i under matched conditions, the input and output
impedance is obtained as from the S-parameters as
1 + S11
1 − S11
1 + S22
Zout = Z0
1 − S22
Zin = Z0
(4.15)
(4.16)
Under the case of a 1-port network, (with no port 2) as shown in Figure 4.8, the meaning of S11
remains the same
The condition an = 0 means no power waves return to the network, that is the corresponding port n is
terminated by their characteristic impedance. Si j is the ratio of outgoing power wave bi in port i for a
incoming power wave a j in port j while all other ports are terminated by matched load.
4.3.1
1 + |S11 |
1 − |S11 |
S11 = Γin
Pref = |S11 |2 Pinc
Zin = Z0
4.4
1 + S11
1 − S11
Return loss and Insertion loss
In case of impedance mismatch at port 1, not all the incident power is accepted by the network, part
of the incident power is reflected back to the source. Defining this loss in incident power as return
loss (RL), it can be obtained from S11 as
RL = −20 log10
Pref
= −20 log |S11 |
Pinc
[dB]
(4.17)
4.5 Properties of S-parameters
69
70
Chapter 4. Network Theory
Figure 4.8: S-parameters is the reflection coefficient of a 1-port network
Due to insertion of the 2-port network in between the source and the load impedance, not all the
accepted power will be delivered to the load. Defining this loss in input power that is available for the
load as insertion loss (IL), it is obtained from S21 as
IL = −20 log10
Ptr
= −20 log |S21 |
Pinc
Figure 4.9: Impedance bandwidth in terms of the reflection coefficient
[dB]
(4.18)
Return loss must be as high possible and insertion loss must be as low as possible for the intended
frequency or signals in an RF block. Note that part of the accepted power can potentially be lost
(absorbed) in the network when the network consist of lossy elements. For a lossy, 2-port network
with power absorbed by the network,
Figure 4.10: Complex source impednace and complex load impedance
|S11 |2 + |S21 |2 < 1
|S22 | + |S12 | < 1
2
4.5
2
complex (not real-valued), for maximum power transfer (from circuit theory)
∗
ZS = Zin,1
Properties of S-parameters
(4.19)
RS + jXS = Rin,1 − jXin,1
We will see the properties of S-parameters (some for the case of special networks)
where ∗ denotes the complex conjugate.
4.5.1
Matching
A matched port has reflection coefficient is zero (-∞dB). A network with all the ports matched has
Snn = 0. Matched conditions imply
4.5.3
S11 = 0 ⇒ Zin = Z0
RL ≥ 20dB means |S11 |2 ≤ 0.01 implying at port 1, less than 1% of incident power is reflected back
to the source. RL ≥ 10dB means |S11 |2 ≤ 0.1 implying at port 1, less than 10% of incident power is
reflected back to the source. Typically frequency bandwidth is defined in terms of the 10dB bandwidth
as the frequency range for which the return loss is greater than 10dB or equivalently |S11 | < −10dB
as shown in Figure 4.9. The 10dB bandwidth is also called as the impedance bandwidth for one port
networks such as antennas.
Reciprocity
A reciprocal network is one with transmission characteristics between port i and j being the same as
between port j and i
Si j = S ji ,
(i ̸= j)
Passive networks with isotropic materials are reciprocal.
4.5.4
Symmetry
A symmetrical network is reciprocal and has equal reflection coefficients at all ports
Sii = S j j and Si j = S ji
4.5.2
Conjugate Matching
In Sec3.3.7, the condition for maximum power transfer under resistive source and load was shown.
The concept can be extended to complex impedances in general. Consider a RF source with complex
source impedance ZS feeding a certain load as shown in Figure 4.10. The load is represented through
a equivalent load impedance of Zin . Since the input impedance at port 1 or the source impedance is
4.5.5
Passive and Loss-less networks
For a passive and loss-less network, the scattering matrix is unitary
ST S∗ = I
4.6 Measuring S-parameters
71
72
Chapter 4. Network Theory
For a 2-port network,
T ∗ ∗
∗
S11 S12
S11 S12
S
S
S11 S12
= 11 21
∗
∗
S22
S21 S22
S21 S22
S12 S22 S21
2
2
∗ + S S∗
|S11 | + |S21 |
S11 S12
1 0
21 22
=
=
∗ + S S∗
0 1
S12 S11
|S22 |2 + |S12 |2
22 21
(4.20)
Example 4.2 For a loss-less passive 2 port network, using theunitary property of Scattering parameter, find the insertion loss if the measured return loss is 10.46dB?
For a loss-less passive 2-port network,
■
|S11 |2 + |S21 |2 = 1
q
⇒ |S21 | = 1 − |S11 |2
RL = 10.46dB ⇒ |S11 | = 10−10.46/20 = 0.3
q
⇒ |S21 | = 1 − |S11 |2 = 0.9454
⇒ IL = −20 log10 |S21 | = 0.41dB
9% (=|S11 |2 ) of incident power is reflected back and
91% (=|S21 |2 ) of incident power is transmitted through.
4.6
■
Measuring S-parameters
Vector network analyzer (VNA) is an instrument that measures S-parameters across a range of swept
frequency. The VNA is a frequency domain measurement instument capable of measuring
• Gain, attenuation and distortion
• Phase and group delays
• Noise figure measurements
• Non-linear measurements Active and Passive devices
• Multi-port differential measurements
• Load-pull measurements
• Antenna Measurements
• Material Measurements
Some of the key system parameters include
• Frequency Range
• Dynamic Range Noise floor and Maximum Signal power
• Port power Loss between source and port
• Harmonics Source related
• Stability Temperature, Power Stability, Sensitivity of receiver
• Measurement Speed
The block diagram of a typical 2-port VNA is shown in Figure 4.11. The unit contains a variable
frequency oscillator that generates the input signal that can be switched and routed to either port 1 or
port 2. The rest of the blocks in the two ports are identical. The part of the signal injected to port
1 is received as the incident signal a1 using a passive device called the directional coupler. Part of
the reflected signal at port 1 b1 is received back by the receiver. Thus, the incident power at the 2
ports and the reflected powers are known by the system which can then determine the complete 2-port
S-parameters.
Figure 4.11: Block diagram of a VNA
74
Chapter 5. Impedance Matching
Figure 5.2: Impedance matching network to achieve impedance matching between complex load and
the characteristic impedance of feeding transmission line
5. Impedance Matching
As seen in Sec. 4.5.2, for maximum power transfer the source and load impedance must be conjugate
matched. 2-port circuit that is introduced between the source and the load as shown in Figure 5.1, is
the matching network that achieves the conditions of conjugate matching and hence lead to maximum
power transfer to the load. The design of such matching networks is called impedance matching. The
matching circuits consists of reactive elements (L & C) and non-resistive elements so that there is no
unnecessary power dissipation in the matching circuit. Insertion loss of the matching circuit must be
zero at the intended frequency band.
Figure 5.3: Example of impedance matching
(150 + j75)Ω. Design an L-type matching network, as shown in Figure 5.3, such that maximum
power is delivered to the antenna whose input impedance is ZA = (75 + j15)Ω.
For maximum power transfer (conjugate matching)
Video link: Impedance Matching
The matching network can also be used for impedance matching between a transmission line and
the load as shown in Figure 5.2. In this case, the characteristic impedance is Z0 is real.
The example below is a tedious method of designing a matching circuit analytically. The procedure is easier to do with Smith Chart.
■
Example 5.1 The output impedance of a transmitter operating at a frequency of 2 GHz is ZT =
ZM = ZA∗
For shunt C and series L, ZM is given as
ZT
1
+ jω L =
+ jω L
ZM = ZT ||
jω C
jω ZT C + 1
=
RT
XT − ω C(R2T + XT2 )
ω
L
+
+
j
C2 R2T ω 2 + (1 − ω CXT )2
ω 2C2 R2T + (1 − ω CXT ) 2
= 75 − j15
Solving for C and L,
C = 0.73pF and L = 6.1 nH
Figure 5.1: Impedance matching network to achieve conjugate matching between a source and load
The method is tedious even to determine two values of L and C. Using the Smith Chart the
procedure is greatly simplified which is discussed next.
■
5.1 Admittance Chart
75
76
Chapter 5. Impedance Matching
Figure 5.6: Transformation of zL to 1/zL leads to defining of the admittance chart with constant
conductance and susceptance circles
Figure 5.4: Admittance is diametrically opposite to impedance
Video link: Smith Chart - Y Chart
The fact that the Smith Chart has curves for impedance and for each point in the impedance
chart there is a diametrically opposite point giving the corresponding admittance value, leads to the
possibility of defining an admittance chart with constant conductance and susceptance circles such
that it location of the point in the impedance and admittance chart remains the same but the grid is
different. This is illustrated in Figure 5.6. The same physical point for zL = 0.6 + j1.2 (as an example)
is read from the admittance chart, the conductance and susceptance as yL = 0.333 − j0.667. It is very
important to note that, in the admittance chart, the negative susceptance is in the upper half while the
positive susceptance is in lower half.
Figure 5.5: Transformation of ZL for λ /4 and λ /2 long lines
5.1
Admittance Chart
The reciprocal of impedance is diametrically opposite in Smith Chart as illustated in Figure 5.4. This
can be proved easily as follows:
ZL − Z0 zL − 1
=
ZL + Z0 zL + 1
1/zL − 1
=−
= −Γ1/z
1/zL + 1
Γz =
5.1.1
Reflection coefficient of normalized impedance 1/zL is the same as that of zL but opposite in phase
(180◦ out of phase). This is also easy to see by the impedance transformation due to a line of length
λ /4 which corresponds to 2β l = π which is diametrically opposite as shown in Figure 5.5. 2β l = 2π
corresponds to distance of λ /2 where the impedance is the same as the load impedance (2π implies
one full circle).
Impedance and Admittance Chart
The impedance and admittance charts shown individually in Figure 5.6 is overlaid to have single chart
able to represent both the impedance and admittance as shown in Figure 5.7. Again it is emphasized
that, in the admittance chart, the upper half circle corresponds to negative susceptance though labelled as positive. The red labels corresponds to values in the impedance chart and the blue labels
correspond to values in the admittance chart. In such a Smith Chart the impedance chart is referred to
as Z-chart and the admittance chart is referred to as Y -chart. Like the case of Z−chart the admittance
is normalized prior to certain Y0 = 1/Z0 before plotting in the Y −chart.
ZL
⇒ ZL = Z0 zL
Z0
Z0
1
YL Z0
yL =
=
⇒ ZL =
=
Y0 ZL
yL Y0 yL
zL =
Video link: Smith Chart - Admittance
5.2 Series and Shunt LC elements
77
78
Chapter 5. Impedance Matching
Figure 5.8: Movement of impedance for series and shunt, inductor and capacitors, within the Smith
Chart
5.2.2
Figure 5.7: Impedance and admittance charts overlaid together in the Smith Chart
Video link: Smith Chart - YZ Chart
5.2
For the case of shunt or parallel connection, since the shunt elements add-up in admittance, the movement in Smith Chart is in the Y -chart. Again, since either the L or C has no conductance and offers
pure sucseptance, the movement is along the constant conductance curves. For a shunt L with a negative sucseptance of − ω1L the movement in the Smith chart is along the Y -chart in the counter-clockwise
direction. Note that the upper half in Y-chart is negative of susceptance and shunt inductance reduces
the sucseptance making the load move to the upper half.
For a shunt C, having a positive susceptance of ω C the movement in the Smith chart is along the
Y -chart in the clockwise direction. Note that the lower half in Y -chart has positive susceptance and
shunt capacitor adds the susceptance making the load move to the lower half.
Series and Shunt LC elements
The impedance matching network consist of inductor(s) and (or) capacitor(s) connected in series or
int parallel (or shunt). The four possible combinations are
1. series inductance =⇒ increasing reactance : Z-chart, clockwise direction
2. series capacitance =⇒ decreasing reactance : Z-chart, counter-clockwise direction
3. shunt inductance =⇒ decreasing susceptance : Y-chart, counter-clockwise direction
4. shunt capacitance =⇒ increasing susceptance : Y-chart, clockwise direction
Each of the four elements leads to a movement with in the Smith Chart as shown in Figure 5.8.
5.2.1
Shunt Elements
Series Elements
We consider series elements first. Firstly, since the series elements add-up in impedance, the movement in Smith Chart is in the Z-chart. Secondly, since either the L or C has no resistance and offers
pure reactance, the movement is along the constant reactance curves. For a series L with a positive
reactance of ω L the movement in the Smith chart is along the Z-chart in the clockwise direction. Note
that the upper half in Z-chart is inductive and series inductance makes the load move to the upper half.
For a series C, having a negative reactance of − ω1C the movement in the Smith chart is along the Zchart in the counter-clockwise direction. Note that the lower half in Z-chart is capacitive and series
capacitor makes the load move to the lower half.
Video link: Impedance Matching using Smith Chart
■ Example 5.2 Revisiting the Ex. 5.1, analyze using the Smith Chart the matching circuit design
when source impedance is ZS = (150 + j75)Ω and load impedance is ZL = (75 + j15)Ω at 2 GHz.
To obtain the matching network using Smith Chart, we need to fix a reference impedance first.
Looking at the two given impedance, 75Ω is a good choice for the reference impedance1 .
Taking reference impedance of 75Ω instead of 50Ω and let us start from the source impedance2 .
The matching network should transform the source impedance such that at the load end, it presents and
impedance of ZL∗ , thereby conjugate matched with the load impedance ZL . To do this, we normalize
1The
2The
same solution approach can be used for any other choice of reference impedance eg. 50Ω as well
procedure is similar even if one decides to start from the load impedance instead of source impedance
5.2 Series and Shunt LC elements
79
80
Chapter 5. Impedance Matching
the load impedance
ZL = (75 + j15)Ω
ZL
zL =
= 1 + j0.2
75
∗
zL = 1 − j0.2
both zL and z∗L are plotted in the Smith Chart as shown in Figure 5.9. Note that the conjugate of an
impedance is the mirror image along the real axis in the Smith Chart. From the source end, since the
first element is a shunt element, we draw the constant conductance circle that passes through zS . The
element close to the load being series element, we draw the constant resistance circle passing through
z∗L 3 . By drawing the constant resistance and constant conductance circles, two intersection points of
the circle are noticed. This implies there are two possible matching circuit realizations. In fact, Figure
5.3 is one of the two possible matching circuit realizations. It is a low-pass filter4 configuration with
a shunt C and a series L. This solution corresponds to the intersection point l p indicated in Figure 5.9.
To identify the L1 and C2 values, starting from zS need to have suitable element to move to the point
l p. As shown in Figure 5.9, this movement being clockwise in the Y −chart, corresponds to a shunt
capacitance. The admittance at the source and that intersection point l p is
yS = 0.4 − j0.2
Figure 5.9: Matching network for Ex 5.2
ylp = 0.4 + j0.5
The additional susceptance needed to move yS to y1p is ylp − yS = j0.7. This additional susceptance
is due to a shunt capacitance C2 with susceptance such that
jω C2
= jω C2 Z0 = j0.7
Y0
Video link: Impedance Matching - Example
0.7
= 0.74pF
2π × 2 × 109 × 75
in (close) agreement with analytical solution obtained in Ex. 5.1.
From the intersection point l p, the movement to z∗L is along the constant resistance curve in the
Z−chart in the clockwise direction implying a series L as the next element The conjugate of impedance
at the load and that intersection point l p is
⇒ C2 =
Exercise 5.1 In Ex 5.2, by selecting the other intersection point in Figure 5.9 show that the high
pass variant as shown in Figure 5.10 can be realized.
■
z∗L = 1 − j0.2
Video link: Impedance Matching - Example 2
zlp = 1 − j1.22
The additional reactance needed to move zlp to z∗L is z∗L − zlp = j1.02. This additional reactance is due
to a series inductance L1 with reactance of
Unlike the previous example, most often one would have ZS or ZL to be 50Ω. In that case, the
matching circuit moves the arbitrary impedance point to the center of the Smith Chart. When LC
matching circuits are used, four different combinations/circuit topologies of L and C is possible. For
each case, it is impossible to realize that particular topology of matching circuit to match to 50Ω if
the load impedance (or source impedance) is in that region. Figure 5.11 shows the forbidden regions
in Smith Chart for a given topology.
jω L1
= j1.02
Z0
1.02 × 75
= 6.09nH
2π × 2 × 109
again in (close) agreement with analytical solution obtained in Ex. 5.1.
⇒ L1 =
5.2.3
■
3 It
is no coincidence that this circle also passes through zL
are discussed in next chapter
4 Filters
Summary of LC matching
The procedure of using Smith Chart for matching arbitrary impedances can be generalized and summarized as follows
1. Find the normalized source and load impedances. Identify the conjugate of load impedance.
2. In the Smith Chart, plot circles of constant resistance and conductance that pass through the
point denoting the source impedance.
5.2 Series and Shunt LC elements
81
82
Chapter 5. Impedance Matching
Y −Chart
Z−Chart
jω L
Z0
G′ =
Series L
G
∆z
CW
Series C CCW
Shunt C
jω CZ0
Shunt L
Z0
jω L
Table 5.1: Summary of movement in Smith Chart with series and shunt LC elements
Figure 5.12: Short circuit and open circuited stub.
3. Plot circles of constant resistance and conductance that pass through the point of the complex
conjugate of the load impedance.
4. Identify the intersection points between the circles in steps 2 and 3. The number of intersection
points determines the number of possible L-type matching networks.
5. Find the values of the normalized reactances and susceptances of the inductors and (or) capacitors by tracing a path along the circles from the source impedance to the intersection point and
then to the complex conjugate of the load impedance.
6. Determine the actual values of inductors and capacitors for a given frequency.
In the above procedure, as an alternative, one can as well move from the load end to the source end.
This will result in exactly the same topology and matching elements as moving from source end to
load end. However, the path taken in the Smith-Chart will be flipped upside down. The summary of
equations to extract the values of L and C based on the needed movement in the Smith Chart is given
in Table 5.1
Note that the above impedance matching is at single frequency. For wideband matching quality
factor based matching techniques with multiple LC stages or use of π − or T − networks are available.
All those are built on the principles of movement of the impedances (and admittances) in the Smith
Chart that is discussed above.
Figure 5.10: Alternate matching network for Ex 5.2
5.3
Figure 5.11: Forbidden regions for ZL to realize the particular matching network topologies
Distributed Element Matching
A transmission line can be used for matching instead of lumped L and C components. A quarter-wave
transformer to match to resistive impedances discussed in Ex. 3.4 is a good example of using the
distributed element for matching. For general loads, LC technique is a good choice. However, at high
frequency, parasitic effects of discrete components needed to realize LC matching network make it
difficult to use such components in realizing matching circuits. The reactive impedance at high frequencies is realized using sections of transmission lines. A stub is a transmission line with suitable
length that is either capacitive or inductive. The effect of shunt capacitor or inductor at particular frequency, can be realized using particular stub length lstub . Two kinds of stub: Open circuited stub and
short circuited stub offering two different input impedance characteristics are possible and shown in
Figure 5.12. The impedance of a open-circuited transmission line is capacitive for l < λ /4 and inductive for λ /4 < l < λ /2. A electrically short section of open-circuited transmission line is capacitive
in nature. Impedance of a short-circuited transmission line is inductive for l < λ /4 and capacitive for
λ /4 < l < λ /2. A electrically short section of short-circuited transmission line is inductive in nature.
Distributed element matching then relies on realizing the inductance or capacitance using a suitable
stub.
As an example, matching using an open-circuited stub connected in parallel is shown in Fig-
5.3 Distributed Element Matching
83
Figure 5.13: Matching using an Open circuit stub connected in shunt (parallel).
Figure 5.14: Analysis in smith Chart for matching using an Open circuit stub connected in parallel.
ure 5.13. The stub is connected at a certain distance ls from the load. The characteristic impedance
of stub and the line is the same Z0 5 . The length of the open circuit stub is lstub . Since the stub is
connected in parallel, effectively it poses an admittance to match the load impedance as seen from
the location where the stub is connected. The movement in the Smith Chart is then in the Y −chart.
In Figure 5.14 the two possible designs of the shunt open-cicuit stub viz., first where the stub offers
capacitive reactance and second where the stub offers inductive reactance. In both cases notice that
the zL is transformed by a movement of 2β ls in the clockwise direction. The choice of ls is such that
till we reach the admittance g = 1 circle. This movement is shown in blue in Figure 5.14. Once the
g = 1 circle is reached, the shunt stub offers the necessary susceptance to move along the constant
conductance curve to the center of the Smith Chart (indicated in red).
Video link: Matching using distributed elements
5This
is to simplify the understanding and not a requirement
86
Chapter 6. Passive Devices
Figure 6.2: Impedance and Admittance of Series and Parallel resonant circuits
6. Passive Devices
Exercise 6.1 Show that the resonance frequency is given by eq. 6.1 for both a) the series resonant
circuit and b) the parallel resonant circuit in Figure 6.1.
Such matching circuits are useful for generating/picking out signals at a particular frequency in
radio receivers and filters.
A radio receiver will have resonant circuit, typically a parallel resonant circuit with high impedance
at resonance. The receiver is set to receive a particular transmission frequency by “tuning” the resonant circuit by varying either the inductor or the capacitor. RLC circuit incorporates the losses in the
form of a resistor R. Such tuned resonant circuits also find application in oscillators and mixers.
Passive RF devices are those which do not draw power (DC or AC) for operation. This chapter
discusses about passive devices such as filters, terminations, attenuators, circulators, power dividers
and so on. These are the building blocks for any RF system.
6.1
6.1.1
Resonance
Resonance is a phenomenon of sustained oscillations the happen in many mechanical, acoustic and
electrical systems. Electrical resonant circuit is a LC Circuit consisting of capacitor C and inductor L,
connected either in series or in parallel as shown in Figure 6.1. The collapsing magnetic field of the
inductor generates an electric current in its windings that charges the capacitor. Once the capacitor is
fully charged, the discharging capacitor provides an electric current that builds the magnetic field in
the inductor. This process of charging and discharging of the capacitor contiinues as electrical oscillations. The frequency of the oscillations is called resonant frequency. At the resonant frequency the
reactance is zero in series LC circuit while the susceptance is zero in parallel LC circuit as shown in
Figure 6.2. The resonant frequency is given as
Quality Factor
Quality factor Q is a key parameter of resonator representing the selectivity of the resonator in allowing/rejecting a frequency band. Q is defined as the ratio of average energy stored to the energy loss
per cycle at the resonant frequency. Thus,
Q= ω
(6.1)
Wstored
Ploss
ω =ω0
Ploss is the energy lost per unit time. Q factor is also related to the 3dB bandwidth of the resonator as
Q=
1
ω0 = √
LC
1
f0 = √
2π LC
■
f0
BW
(6.2)
Note that the 3dB frequency bandwidth defined as
BW = fc2 − fc1
where fc1 and fc2 are the lower and upper 3dB cut-off frequencies. Figure 6.3 shows the typical
response of the resonator with the upper and lower cut-off frequencies indicated. The resonant frequency is the geometric mean of the 3dB cut-off frequencies
f0 =
fc1 fc2
Example 6.1 Find the resonant frequency, quality factor, the bandwidth and hence the lower and
upper 3dB cut-off frequencies of the current response of the series RLC circuit shown in Figure 6.4.
■
Figure 6.1: Series and Parallel LC resonant circuits
p
6.2 Filter
87
88
Chapter 6. Passive Devices
Figure 6.3: 3dB bandwidth with center frequency and upper and lower cutoff frequencies
Figure 6.5: Insertion loss characteristics of ideal filters
Figure 6.4: Circuit for Ex 6.1
Figure 6.6: Characteristics of a real filter
The resonant frequency for series RLC circuit and the bandwidth is first determined as
1
1
√
= √
= 0.5 GHz
2π LC 2π 10 × 10−9 × 10 × 10−12
9
−9
ω0 L 2 × 3.14 × 0.5 × 10 × 10 × 10
Q=
=
= 3.16
R
10
f0 0.5 × 109
BW =
=
= 0.16 GHz
Q
3.16
f0 =
To determine the upper and lower cut-off frequencies,
f02 = fc1 fc2
BW = fc2 − fc1
2
⇒ fc1 BW = f02 − fc1
⇒ fc1 =
−BW +
q
BW2 + 4 f02
2
= 0.43GHz
fc2 =
f02
= 0.59GHz
fc1
■
6.2
Filter
Filter is a 2-port networks that allows certain frequency to pass through where as blocks other frequency. Thus it consists of two bands viz.,
• Pass-band: Frequencies that pass through
• Stop-band: Frequencies that are rejected (not allowed to pass through)
In a communication chain, filter is used to suppress out-of-band frequencies from either being radiated
out or flow through the RF chain. Filters are essential components to eliminate/suppress interference.
Example is using a filter for image frequency rejection when using a mixer1 . For an ideal filter, there
is no insertion loss for frequency in the pass-band and infinite insertion loss at frequencies in the stopband. In the stop-band, the signal is either attenuated or reflected back. Essentially there are 4-types
of filters:
1. Low-pass filter
2. High-pass filter
3. Bandpass filter and
4. Bandstop filter
The characteristics of each is depicted in Figure 6.5. fc is the cut-off frequency of the filter. For
a real filter (unlike the ideal case), the insertion loss (IL) is finite in the stop band allowing a weak
signal to still pass through. The insertion loss must be sufficiently high enough to atleast suppress the
out-of-band signal to be below a desired level. The IL in the pass-band is greater than zero meaning
even in the pass-band there could be a marginal loss. Finally, the frequency cut-off is not sharp in
real filters and has certain roll-off. Cut-off frequency in this case is the frequency at which the output
level from the filter falls to 50% (-3 dB). It is also called the half-power frequency.
S21 (equivalent to negative of IL in dB) is the frequency response of a filter, represented as a twoport network. The typical frequency response of filter and its characteristics is shown in Figure 6.6.
The response shown is that of a band-pass filter. The input and output of a high pass filter in the time
domain for a sinusoidal signal is shown in Figure 6.7.
1 discussed
in next chapter
6.3 Termination
89
90
Chapter 6. Passive Devices
Figure 6.7: Input and output timedomain response of a high pass filter
Figure 6.9: A RF attenuator offers a factor of reduction in the RF power.
realized using resistive materials for outer conductor (in coaxial lines). The attenuation factor is the
A is the ratio of the input power to the output power. Thus A is the inverse of the gain. As shown in
Figure 6.9, the attenuator is matched Z0 at the input meaning the loss in the incident power is not due
to reflection, instead due to adsorption of RF power due to lossy material inside the attenuator.
Pabs = Pin − Ptr
A [dB] = Pin [dBm] − Ptr [dBm]
Figure 6.8: A RF termination offers a reflection coefficient of zero ideally.
6.2.1
6.3
Types of RF Filters
Some of common types of RF filters are
1. Discrete Component Filter: Using lumped element capacitance and inductance < 1GHz
2. Transmission Line Filter: Using distributed transmission line sections > 1 GHz
3. Waveguide and Resonator Filter: High power application
4. Surface Acoustic Wave Filter: Compact filters with EM to acoustic energy conversion
Lumped element filters (realized using L and C) are useful in the sub-GHz band. For higher frequencies, component parasitic effects are significant. In the GHz regime, transmission line (distributed)
filters are more attractive. Classical design techniques to design Lumped element (LC) filters can
be adopted to realize a variety of planar transmission line (distributed element) filters. Due to the
periodicity in the input impedance of a transmission line section, the pass-band and stop band of a
distributed element filter also exhibit periodicity with frequency.
Termination
A termination is a 1-port device where power is absorbed by a length of lossy material at the end of a
transmission line. Dissipative terminations are also called as matched load as power is absorbed and
reflections are small irrespective of the characteristic impedance of the transmission line. When the
characteristic impedance of a line does not vary much with frequency, as is the case with a coaxial line
or microstrip, a simpler and smaller termination can be realized by placing a resistor to ground. As
shown in Figure ?? an ideal termination has a reflection coefficient of zero. All the incident RF power
it absorbed. In reality however, due the properties of the material used to realize the termination, the
absorption property is good only upto a certain frequency band. For an ideal termination,
S = S11 = ΓL = 0
6.4
(6.3)
Attenuator
An attenuator is a 2-port device that reduces the signal level/ RF power traveling along a transmission
line by a certain factor. The line is made lossy but has the same characteristic impedance approximating that of the connected transmission lines so as to reduce reflections. The attenuation is usually
For an ideal attenuator,
S
S
0 α
Sideal = 11 12 =
S21 S22
α 0
(6.4)
(6.5)
(6.6)
and
α [dB] = −A [dB]
6.5
Circulator
Circulator is 3-port device that controls the direction of RF power flow in a circuit. An ideal circulator
transfers signal
• from port 1 to port 2
• from port 2 to port 3 and
• from port 3 to port 1
as shown in Figure 6.10. Thus the S-parameters of an ideal circulator is
0 0 1
Sideal = 1 0 0
(6.7)
0 1 0
The diagonal elements Sii = 0 indicate that all the 3-ports are matched2 . Since the circulator transfers
all the power that flows into port 1 to port 2 while isolating any power flowing into port 2 from
flowing into port 1, clearly the circulator is a non-reciprocal device (Si j ̸= S ji ). Passive circulators
use magnetized ferrite material as core. Ferrites are anisotropic material with material properties
depending on the direction of wave/signal propagation. Non-ferrite circulators are active circulators
realized using transistors.
Circulators find applications in realizing two important RF components:
2This is possible only if the 3-port network is either non-reciprocal or lossy. It is impossible to realize a three port
network, matched at all three ports with just reciprocal and lossless elements.
6.6 Power Divider
91
92
Chapter 6. Passive Devices
Figure 6.12: Wilkinson Power divider with quarter wave transformer and isolation resistor.
Figure 6.10: Power flow in a circulator.
6.6
Figure 6.11: Circulator as a duplexer and as an isolator.
Figure 6.13: Directional Coupler with coupling between port 1 and port 4. Port 3 is the isolated port.
1. Duplexer It is the fundamental component that essentially isolates the transmit and receive chain
in a transceiver. The transmitters RF power output is routed to the antenna while the antenna’s
received power is routed to the receiver. Thus the transmitter and the receiver are isolated from
each other. Thus a duplexer is a very important component in RADAR systems allowing the
same antenna to be used for both transmit and receive chains as shown in Figure ??.
2. Isolator A circulator is able to isolate the signal reflected by a device under test (DUT) and prevents the reflected power to reach the signal source. The third port is connected to a termination
(isolation resistor). The power reflected by DUT is dissipated by the isolation resistor which is
matched to the termination port as shown in Figure 6.11.
in Figure 6.13. The coupling coefficient is the amount or factor of power that flows to port 4 and is
expressed in log scale as
A 20dB directional coupler (k = 0.1) decouples 1% of incident power at port 1, to port 4 and 99% of
incident power flows through main line to port 2. The ideal S-parameters are of the form
√
− j 1 − k2
0
k
√0
−1 − j 1 − k2
0
k
√0
(6.9)
S= √
2
0
k
0
−
j
1
−
k
2
√
k
0
− j 1 − k2
0
Power Divider
A power divider is a 3-port device that splits RF power into two ports often into two equal halves3 .
Wilkinson power divider is a special 3dB resistive power divider that splits RF power in port 1 into
two equal halves into port 2 and port 3. This 3-port device is matched at all three ports and the
isolation resistor isolates the ports 2 and 3 meaning RF power into port 2 is absorbed by the resistor
without leaking into port 3 and vice-versa. Additionally the √
Wilkinson power divider consists of 2
quarter-wave transformers of characteristic impedance Z0Q = 2Z0 . The isolation resistor is R = 2Z0
and the structure is as shown Figure 6.12. Ideal Scattering matrix,
0 1 1
−j
Sideal = √ 1 0 0
(6.8)
2 1 0 0
Under equal power division, there is no dissipation by the resistor |S21 |2 + |S31 |2 = 1.
6.7
k[dB] = 20 log(k)
Directional Coupler
A directional coupler is a 4-port device that separates the power in port 1 into a small part to port 4
(called the coupled port) while most of the power is sent to port 2. Port 3 is the isolation port as shown
3 and
sometimes into unequal parts
Directional couplers are used to measure/probe forward traveling and backward traveling power
waves eg. in a VNA.
6.8
Balun
A balanced transmission line is on with two conductors carry currents in opposite direction at any
time instant. Eg. Two-wire transmission line, coupled microstrip line. The balanced line is, thus
driven by symmetric signals (differential signals) of +V and V on the two conductors4 .
Un-balanced Transmission line is where only one of the two conductors carry currents at any time
instant while the other conductor is ground with zero current flowing at any instant. eg: Coaxial
line, microstrip line, stripline. Thus, unbalanced lines are driven by single ended signal alternating
between +V and −V with respect to an explicit ground conductor.
A balun is a special 2 port device used to connect a balanced transmission line (or circuit) to a
unbalanced transmission line (or circuit) and vice-versa. At low-frequency a center-tap transformer
is used as a balun. The center-tap of secondary coil is grounded as shown in Figure 6.14. The
unbalanced voltage v0 (t) and the its relation to the balanced voltages v1 (t) and v2 (t) is given as
1
v1 (t) = −v2 (t) = √ v0 (t)
2
4The
ground of 0V is not physically available but implicitly determined by the sum of the two signals.
(6.10)
6.8 Balun
93
Figure 6.14: Center Tap transformer as a balun and the corresponding voltage signals
Figure 6.15: Circuit realization of a balun
At high-frequency transformers are unattractive due to losses. Instead, power divider with 2
quarter-wave lines effectively giving 180◦ phase difference (electrical length of λ /2) are typically
used as Balun.
Balun can be realized using circuit elements as well and typically such balun are narrow band
in nature. It consists of out-of-phase power splitters with a combination of low pass and high pass
filters as shown in Figure 6.15. The characteristic impedance at the balanced port is 2Z0 while the 4
individual circuit elements are obtained for a desired ω0 = 2π f0 as
√
2Z0
L = LLP = LHP =
(6.11)
ω0
1
C = CLP = CHP = √
(6.12)
2Z0 ω0
96
Chapter 7. Active Devices
Figure 7.2: A superhetrodyne receiver architecture
7. Active Devices
A generic RF transceiver system consists of a transmitter, a wireless channel and a receiver. A modulator converts the base band data to RF signal that can be transmitted wirelessly. A demodulator in
the receiver chain converts the RF signal back to the base-band data. Many possible transceiver architecture are possible for the RF front end, regardless of the architecture, the basic building blocks are
both active and passive components include Amplifiers (Power amplifiers and Low Noise Amplifiers),
Oscillators, Mixers and Phase Locked Loop (PLL) shown in Figure 7.1.
Figure 7.3: Power amplifier and Low-noise amplifier
7.2
7.1
Radio receiver
Function of a receiver is the demodulation of a wanted signal in the presence of undesired interferers
and noise. To support a high number of users, the communication frequency band is divided into
narrow channels typically having a bandwidth in the range of 100 kHz to 100 MHz. Filters with
high out-of-band attenuation are required to select those narrow channels. A reciever architecture
that is widely used is the super-heterodyne Receiver as shown in Figure 7.2. Hetrodyne refers to
multiplication of two signals. Thus in a super-hetetrodyne reciever the mixer, a component used to
multiply two signals is the key component. Signal received by the antenna is filtered by band-pass
filter, amplified by Low Noise Amplifier LNA, converted down to an intermediate frequency (IF)
by means of a mixer fed by a local oscillator (LO) followed by subsequent filtering at IF. Filters with
sharp roll-off are easier to realize in the IF and it is advantageous to down-convert the RF to IF before
demodulating to the base-band.
Figure 7.1: Active components in a typical RF transceiver
Amplifier
An amplifier is a 2-port device that increases the power in the input signal. Used both in transmitter
and receiver for signal conditioning to meet link budget. The amplifier used in the transmitter is
called a Power Amplifier (PA) and the one used in the receiver is called a Low-noise amplifier
(LNA) as shown in Figure 7.3. For example, bluetooth requires transmit power to be 0dBm and the
receiver sensitivity to be -60dBm. Receiver sensitivity is the miniumum signal strength that should be
available at the receiver to be able to demodulate and recover the baseband with reasonable levels of
bit errors. In the case of the bluetooth receiver, the low-noise amplifier (with variable gain) to boost
the signal back to 0dBm i.e., with a gain of maximum 60dB prior to demodulation/down-conversion.
Figure 7.4 shows the time domain response of an ideal amplifier, with a voltage gain of 2. Note
that the input peak voltage is 1V while the ouput voltage peak is 2V and hence the linear voltage gain
β = 2 for that example. For an ideal linear amplifier,
vout (t) = β vin (t)
vout (ω ) = β vin (ω )
(7.1)
(7.2)
Eq. 7.2 shows that the gain β is a constant regardless of the frequency of the input signal. This
is the case for a ideal amplifier. However, in the case of real amplifiers, the gain is not independent
of the input frequency. A typical response is shown in Figure 7.5. The amplifier should provide the
necessary gain represented as G( f ) in the desired frequency of interest. Output side the frequency
band the gain drops. A frequency bandwidth of the gain response can then be defined. The GainBandwidth product for an amplifier is a constant. This implies if high gain is necessary, the bandwidth
is low. If bandwidth needed is high, the gain is lower. Some key performance characteristics of an
amplifier are
7.2 Amplifier
97
98
Chapter 7. Active Devices
Figure 7.4: Time domain response of an ideal linear amplifier
Figure 7.6: MOS transistor as square-law device leading to 2nd order non-linearity.
Figure 7.5: Frequency domain response of an amplifier. Gain-Bandwidth product is a constant.
Operating frequency and bandwidth: Range of signal frequencies that the amplifier is able to amplify the signals. Eg. Narrowband, Wideband etc..,
Output power: Maximum power available at the output of the amplifier. Eg. 0dBm, 30dB
Gain (and gain flatness): Ratio of output to input power, Response of gain with respect to frequency.
Expressed in dB. Eg. 40dB
1-dB Compression: Input power for which Gain is reduced by 1dB due to device saturation, Eg:
-20dBm
Noise-figure: Ratio of input and output signal-to-noise ratio
Dynamic Range: Potential range of output power levels from Noise power to compressed/saturated
output power
Third Order Intercept: Measure of linearity of a amplifier, measured and computed using 2 tones
(frequency)
Input/Output Reflection Coefficient : Measure of input/output matching characteristics (usually matched
to 50Ω).
Figure 7.7: Differential pair that exhibits 3rd order non-linearity.
Metal-oxide semiconductor (MOS) transistors operate as square-law devices as shown in Figure 7.6. The relation between output and input voltages is
vout = VDD − ID RD
1
W
= VDD − µnCox (vin −Vth )2 RD
2
L
(7.4)
(7.5)
and this leads to s 2nd order non-linearities. Figure 7.7 shows a differential amplifier which exhibits
3rd order non-linearity. Such non-linearity lead to many interesting and usually undesired effects in
amplifiers limiting the usable range of such amplifiers. Three important effects due to non-linearity
in amplifiers are
1. Harmonic Distortion
2. Gain Compression
3. Intermodulation Product
Video link: Amplifier
7.2.1
Transistor as an amplifier
Transistors are the basic building block of amplifiers. Amplifiers are non-linear devices due to saturation in transistors. As a consequence instead of a linear response as in eq. 7.2 between the input and
output voltage, the real response is a non-linear function of the input voltage
vout (t) ≈ β1 vin (t) + β2 v2in (t) + β3 v3in (t) + · · ·
Video link: Amplifier - Transistor as building block
(7.3)
This implies unlike for the case of ideal linear gain, when the input voltage doubles, the output does
not just double but higher order terms due to β2 and β3 and so on add up.
Video link: Amplifier - Non-linearities
7.2 Amplifier
99
100
Chapter 7. Active Devices
Figure 7.8: Harmonic frequencies of GSM signal at 900MHz. The 5th harmonic
Figure 7.9: Gain compression where gain of amplifier drops as input power is increased
7.2.2
Harmonic Distortion
Since the response for a non-linear amplifier is of the form eq. 7.3,
vin (t) = A cos ω t
vout (t) = β1 A cos ω t + β2 A cos ω t + β3 A cos ω t
2
2
3
3
β2 A2
α3 A3
= β1 A cos ω t +
(1 + cos 2ω t) +
(3 cos ω t + cos 3ω t)
2
4
β 2 A2
3β 3 A3
β 2 A2
β3 A3
+ β1 A +
cos ω t +
cos 2ω t +
cos 3ω t
=
2
4
2
4
3 β3 A3
β2 A2
is the amplitude of the 1st harmonic which is the intended
2 is the DC term. β1 A + 4
frequency. Notice that due to the non-linearity, the gain of frequency ω is not just β1 but the 3rd order
term β3 appears. Depending on the value of β3 the gain can be lower than that of the linear case, β1 .
2
3
The amplitude of 2nd harmonic frequency 2ω is β22A . The amplitude of 3rd harmonic term is β34A .
When a signal with frequency f0 is the input to an amplifier with 3rd order non-linearity, leads to DC,
2nd harmonic and 3rd harmonic frequency (with frequency f = 0, 2 f0 and 3 f0 ) to appear at the output.
Thus amplifier operating at 2.4GHz produces 2nd harmonic at 4.8GHz and 3rd Harmonic at 7.2GHz.
The n-th harmonic grows in proportion to An .
Video link: Amplifier - Harmonic Distortion
7.2.3
Gain Compression
The second important effect due to non-linearity of an amplifier is the gain compression. As input
power increases linearly, beyond a certain in-put power the output power of amplifier ceases to increase linearly as shown in Figure 7.9. The point where the amplifier gain deviates from linear gain
by 1dB is called the 1-dB compression point denoted as Pin,1dB or simply P1dB . The gain corresponding to 1dB compression point is referred to as G1dB = G0 − 1 where G0 is the amplifier gain for low
power input. Notice that the output power when the input is 0dBm is G0 dBm. The 1-dB compression
point refers to the input power.
Pin,1dB [dBm] ≡ P1dB point
The output power at the 1dB compression point is therefore,
Pout,1dB [dBm] = G1dB [dB] + Pin,1dB [dBm]
= G0 [dB] − 1dB + Pin,1dB [dBm]
(7.6)
(7.7)
As seen in eq. 7.6, the 3rd order non-linearity leads to a gain of
3β3 A3
β1 A +
4
It the amplifier was ideally linear, then the voltage gain is β1 with β2 = β3 = 0. In the case of nonlinear device, depending on if β1 β3 < 0, the amplifier can be compressive beyond a certain input
signal amplitude A. For most of RF amplifiers shown in Figure 7.7, indeed β1 β3 < 0. The amplitude
of the input signal at 1dB compression point, Ain,1dB is then obtained as
3
20 log β1 + β3 A2in,1dB = 20 log |β1 | − 1dB
4
s
β1
Ain,1dB = 0.145
β3
(7.8)
Exercise 7.1 Starting from the 3rd order non-linear relation between input and output signals
shown in eq. 7.3, derive the condition for the peak amplitude of input Ain,1dB in terms of β1 and β3
as shown in eq. 7.8.
■
■ Example 7.1 A bluetooth receiver employs a low-noise amplifier having a gain of 10 and an input
impedance of 50Ω. Determine the value of β3 that yields a P1dB of -30dBm.
Note that to use eq. 7.8 to find β3 , we need to use the given P1dB to find the amplitude at the 1dB
compression point, Ain,1dB making use of the fact that the system is a 50Ω system.
P1dB = −30dBm
Ain,1dB = 20mV peak-to-peak
= 10mV peak
7.2 Amplifier
101
102
Chapter 7. Active Devices
Figure 7.11: 3rd order inter modulation products arising in a 2-tone test
Figure 7.10: Interference that can potentially leads to desensitization of receiver due to gain compression
β1 is the given gain of LNA which is 10.
s
β1
Ain,1dB = 0.145
β3
p
⇒ 10mV = 0.145|β1 |/|β3 |
β1 = 10 given gain
Figure 7.12: Interference due to 3rd order intermodulation products
Higher the 1dB compression point, higher the dynamic range.
β3 = 14, 500 V−2
■
Gain compression affects systems with modulation schemes that carry information with amplitude
(Eg. AM, QAM) and does not affect systems with no-information in amplitude (Eg. FM, PSK).
However, even if one chooses a modulation scheme that does not depend on signal amplitude, gain
compression can affect the link by a interfering signal or interference. This phenomenon is called
desensitization where in out-of-band large inference signal can lead to distortion of in-band signal
and reduction of gain of the receiver. This is illustrated as follows:
Consider a situation where the desired signal is at f1 and a strong interference signal f2 as shown
in Figure 7.10. The 3rd order non-linearity of the form of eq. 7.3 leads to the output voltage in the
desired frequency f1 as
vin (t) = A1 cos ω1t + A2 cos ω2t
3
3
vout (t) ≈ β1 + β3 A21 + β3 A22 A1 cos ω1t
2
2
(7.9)
(7.10)
When the interference signal is much higher in amplitude than the desired signal, A2 >> A1 , the gain
is approximated as
3
vout (t) ≈ β1 + β3 A22 A1 cos ω1t
2
Interferer can potentially reduce the gain to zero when β1 β3 < 0 and for certain A2 . Such an interferer
is called a blocker or blocking signal.
Also shown in Figure 7.9 is the output power of minimum detectable signal, Pout,mds [dBm].
Pout,mds is the minimum power required for the receiver to decode information from the signal in
the presence of noise. Pout,mds is typically 3dB above the noise power.
Pout,mds [dBm] = Pin,mds [dBm] + G0 [dB]
(7.11)
Dynamic range, dR is the region where the amplifier has a linear power gain expressed as the difference between Pout,1dB and Pout, mds .
dR [dB] = Pout,1dB [dBm] − Pout,mds [dBm]
= Pin,1dB [dBm] + G0 [dB] − 1 − Pout,mds [dBm]
= Pin,1dB [dBm] − Pin,mds [dBm] − 1
(7.12)
(7.13)
(7.14)
Video link: Amplifier - Gain Compression
7.2.4
Intermodulation Product
When two signals of different frequencies f1 and f2 called a two-tone signal, is given as input to a nonlinear system, the output contains a whole set of frequency components called as the intermodulation
products. These frequency components arise due to the multiplication of the two frequency signals.
The input and output signals for two-tone test is then,
vin (t) = A1 cos ω1t + A2 cos ω2t
(7.15)
vout (t) = β1 (A1 cos ω1t + A2 cos ω2t) + β2 (A1 cos ω1t + A2 cos ω2t)2
3
+ β3 (A1 cos ω1t + A2 cos ω2t)
(7.16)
(7.17)
The harmonics and their corresponding amplitudes is shown in Table 7.1. Of the intermodulation
products, the DC term and frequency f1 ± f2 is not shown. The remaining frequencies in the output
include 2 f1 − f2 , f1 , f2 , 2 f2 − f1 , 2 f1 + f2 , 2 f2 + f1 as shown in Table 7.1.
Overtone Signal
ω1 , ω2
2ω1 ± ω2
ω1 ± 2ω2
β1 A1 + 34 β3 A31 + 32 β3 A1 A22 cos ω1t + β1 A2 + 43 β3 A32 + 32 β3 A2 A21 cos ω2t
3β3 A21 A2
4
3β3 A1 A22
4
cos (2ω1 + ω2 )t +
cos (2ω2 + ω1 )t +
3β3 A21 A2
4
3β3 A1 A22
4
cos (2ω1 − ω2 )t
cos (2ω2 − ω1 )t
Table 7.1: Overtones and corresponding signal with amplitude
Out of the different frequency components, of particular interest are the overtones of 2 f1 − f2
and 2 f2 − f1 . These overtones are called third-order intermodulation (TOI) products and are closest
to the orgiinal two frequencies. This is illustrated in Figure 7.11. TOI is important because, out-of
7.2 Amplifier
103
Figure 7.13: IMD as the difference between desired to undesired signal power at the 1dB compression
point.
band signals can interfere with the desired channel. This is illustrated in Figure 7.12. As shown in
Figure 7.11, the difference between the powers (in dBm) of the desired signal and the undesired signal
at the output is called intermodulation distortion, IMD [dB].
IMD [dB] = Pout ( f2 ) − Pout (2 f2 − f1 )
(7.18)
The output power of desired and TOI signals as a function of input signal power is shown in
Figure 7.13. In the linear region, the output power of desired signal, Pout ( f2 ) increases in proportion
to input power Pin ( f2 ). The power of the third order product Pout (2 f2 − f1 ) increases, in proportion to
third power of input, i.e.,
Pout (2 f2 − f1 ) ∝ Pin3 ( f2 )
Projecting the linear region of Pout ( f2 ) and Pout (2 f2 − f1 ) results in a fictitious point called the
third order intercept point (IP3 or TOI or OIP3). The corresponding projected input power is the
input third order intercept point or IIP3. The spurious free dynamic range, d f is defined as the ratio
of power of fundamental to the strongest spurious signal at the output.
Video link: Amplifier - Intermodulation Products
7.2.5
Transistors and Semiconductor Material
There are three major types of transistors used for RF applications:
1. Bipolar Junction Transistor (BJT)
• Bipolar current is due to both minority and majority carriers
• Current controlled device
• Low input impedance
• High Voltage Gain
• Medium switching time
• Widely used: Low-cost, sub-GHz opertating frequency, low-noise, high power
104
Chapter 7. Active Devices
Figure 7.14: Frequency range and power handling of different types of transistor material.Source:
Internet
2. Field Effect Transistor (FET)
• Monopolar current is due to single carries either holes (p-channel) or electrons (nchannel)
• Voltage controlled device
• High input impedance
• Low voltage gain
• Fast switching time
3. High Electron Mobility Transistor (HEMT)
• Heterostructure FET (HFET)
• Channel with 2-different materials
• High frequency of operation
• Low-noise performance
• More expensive fabrication
The type of semiconductor material used can be broadly categorized into 2 :
1. Class IV: These include group IV elements of the periodic table such as
• Silicon (Si) BJT, MOS
• Silicon-Germanium (SiGe) BiCMOS : Higher cut-off frequency than CMOS
• Silicon-Carbide (SiC) : Higer power desnsity
2. Class III-V: These include combination of group III and group V elements of the periodic table
such as
• Gallium Arsenide (GaAs) : Most widely used after Silicon
• Indium Phosphide (InP)
• Gallium Nitride (GaN) : Higher Power Handling capabilities
The frequency range and power handling capacity of different types of transistor materials is
shown in Figure 7.14. GaN is a special semiconductor material with high power handling capabilities
and can be used in the millimeter wavelength regime.
Video link: Amplifier - Semiconductor Materials
7.2 Amplifier
105
106
Chapter 7. Active Devices
Figure 7.15: Bias network and matching network are two key elements of an amplifier.
Figure 7.17: Efficiency of the amplifier in terms of the conduction angle.
Efficiency in terms of the conduction angle Θ is
η =−
Θ − sin Θ
2[Θ cos(Θ/2) − 2 sin(Θ/2)]
(7.20)
and this is plotted in Figure 7.17.
1. Class A with Θ = 2π , ηA = 50.0%
2. Class B with Θ = π , ηB = 78.5%
3. For Class C efficiency is high but RF output power is low, with high non-linearity
4. Class D, E and F have higher efficiency with transistor operating in switched-mode
Other commonly used definitions for efficiency of RF amplifier are
PRF,out − PRF,in
PDC
PRF,out
Total Efficiency,ηtotal =
PDC − PRF,in
Power Added Efficiency, PAE =
7.2.7
(7.22)
■ Example 7.2 Following measurements are obtained for an RF amplifier: Pin = 2dBm, Pout = 34dBm,
Vdc = 3V and device current Idc = 2.25A. What is the PAE of this amplifier?
Figure 7.16: Class of operation of an amplifier depends on the quiescent point.
7.2.6
(7.21)
Elements of an RF amplifier
An amplifier circuit consists of two key elements viz., the bias network and the input and output
matching networks as shown in Figure 7.15. The matching network is necessary for impedance
matching both at the source and load end of the amplifier typically to 50Ω. The role of the biasing
network is to set appropriate quiescent (Q) point for the active devices under specified operating
conditions. This determines the class of operation of the amplifier as discussed in the next.
Pout = 34dBm = 1034/10 = 2511.8mW
Pdc = Vdc Idc = 3 × 2.25 = 6.75W
Classes of Operation
PAE =
Depending on application, amplifiers are designed with specific bias conditions. The class of operation is determined based on conduction angle, Θ that indicates the region of sinusoidal signal when
current starts to flow through the load. The conduction angle depends on the quiescent point (Q point)
of the transistor. The Q-point is determined by the bias network.
Efficiency of an amplifier is defined as the ratio of the RF power delivered to the load to the DC
power consumed by the amplifier.
η=
PRF,out
× 100
Pdc
(7.19)
Pin = 2dBm = 102/10 = 1.58mW
PRF,out − PRF,in 2.5118 − 0.00158
= 36.2%
=
Pdc
6.75
■
Video link: Amplifier - Efficiency
7.2 Amplifier
107
108
Chapter 7. Active Devices
Figure 7.19: An oscillator realized using an amplifier with a positive feedback.
Figure 7.18: DC equivalent circuit of the bias network for a BJT amplifier.
Video link: Bias Network for an amplifier
Video link: Amplifier - Classes of operation
7.2.8
Biasing Network
The bias network determines the quiescent (Q) point of the transistor providing the necessary base
current in the common emitter configuration. For RF BJT, biasing is of two types:
1. Passive (using passive circuit elements) and
2. Active (using transistor)
Passive biasing essentially consists of inductors and capacitors for routing the RF and DC signals.
The inductor is used as a RF Choke (RFC) offering a reactance of XL = ω L that blocks RF signal
at high frequency. Typical values of 200nH for 1GHz systems. The capacitor offering a reactance
of XC = − ω1C is used as a DC block allowing the RF signal to pass through while the DC voltage
is blocked. Typical values of blocking capacitors are 200pF at 1GHz. Thus, at DC, all blocking
capacitors represent an open circuit and all RFCs behave like short circuits
■
Example 7.3 Design a passive bias network circuit shown in Figure 7.18, for BJT setting of IC =
10mA, VCE = 3V, VCC = 5V. Assume the transistor has a β = 100 and VBE = 0.8V.
Design of bias network is to obtain the values of the bias resistors R1 and R2 in Figure 7.18. This is
determined by looking into the equivalent circuit of the amplifier at DC. Given the β of the transistor,
we use the relation between the collector current and the base current to determine the bias current I1
and from the voltage drop across R1 and R2 based on the necessary bias current I1 .
IB = IC /β
7.3
Oscillator
An oscillator converts DC power to RF Signal through harmonic oscillations. The oscillator should
provide stable oscillations at a particular (carrier) frequency typically obtained through a resonance
effect. On the other hand, relaxation oscillators and astable multivibrator produce square/rectangular
pulsed waveforms.
RF Oscillators generate sinusoidal signals are typically realized using an amplifier and a positive
feedback system as shown in Figure 7.19. An oscillator can be viewed as a linear feedback systems
where stability conditions are not fulfilled. Consider the amplification stage HA (ω ) and feedback
stage HF (ω ). The closed loop transfer function is given as
HA (ω )
vout
= HCL (ω ) =
vin
1 − HA (ω )HF (ω )
(7.23)
For a oscillator, vin = 0 and the condition for output to be non zero, leads to Barkhausen criterion
viz.,.
HA (ω )HF (ω ) = 1
(7.24)
HA (ω )HF (ω ) is called the loop gain and the above condition is necessary for sustained oscillations.
Otherwise the oscillations are either damped or non-sinusoidal as shown in Figure 7.20.
Exercise 7.2 Starting from the amplifier gain and the feedback gain, show that the closed loop
I1 = IB + IC
= IC 1 + β
−1
transfer function for a feedback system shown in Figure 7.19 is given by eq 7.23.
= 10.1mA
VCC −VCE
= 198Ω
I1
VCE −VBE
= 22kΩ
R2 =
IB
R1 =
■
■
RF Oscillators design utilizes a tank (LC) resonant circuits or crystal resonators in the feedback path.
The amplifier in forward path being inverting amplifier (180c irc phase), the feedback path should provide additional 180◦ to meet the total 360◦ phase requirement of the Barkhausen criterion. Depending
of the resonant circuit topology and the connection with the amplifer, different possible types of oscillators such as Colpitts, Hartley, Wein Bridge, RC, Crystal Oscillators exist. Figure 7.21 shows the
resonant circuit elements of Hartley and Colpitts oscillator. Hartley oscillator uses an inductor with
a center-tap to feedback to the input of the amplifier. Colpitts oscillator on the other hand uses two
capacitors in series instead. The oscillators frequency is the resonant frequency of the tank circuit,
7.3 Oscillator
109
110
Chapter 7. Active Devices
Figure 7.20: An oscillator can generate sustained harmonic oscillations only when Barkhausen criterion for loop gain is met.
Figure 7.22: Phase noise of oscillator is the deviation of the output frequency from the intended
frequency f0 .
Figure 7.21: Resonant Circuits used in Hartley and Colpitts oscillator.
and is given as
1
√
2π LCT
C1C2
CT =
C1 +C2
fT =
(7.25)
Figure 7.23: Block diagram of a PLL as a frequency multiplier.
(7.26)
7.4
A phase locked loop is a special device where the frequency of output signal is usually a constant
multiple of that of the input (reference) signal. PLL has a feedback loop with the VCO as a key
component in the forward path as shown in Figure 7.23. The feedback path consists of a frequency
divider the ouput of which if fed to the phase comparator/detector. The phase detector gives the
difference between the phase of the reference frequency and the frequency divided signal. This phase
difference is passed through a loop filter (to have a stable feedback loop) the output of which is the
control voltage for the VCO. Since the output frequency is divided by N prior to phase comparator,
feedback loops ensure the VCO receives sufficient voltage control signal such that its output frequency
is N fref .
Video link: Oscillator
7.3.1
Phase Noise
Phase Noise is the most important performance metric of an oscillator. It refers to the random variation
of the phase (or frequency) of the output signal from the intended frequency (also called the carrier
frequency). In the time-domain, phase noise is equivalent to jitter. Phase noise originates due to the
various noise sources of the oscillator circuit, including thermal, shot, and 1/ f noise. Phase noise is
expressed in dB relative to the carrier, i.e. in dBc eg. -120dBc. The phase noise rises much faster
closer in towards the carrier and falls away until it ultimately reaches a noise floor
7.3.2
Voltage Controlled Oscillator (VCO)
VCO is a special osciallator where the carrier frequency is controlled by a tunable tank circuit. A
varicap or variable capacitor realized using a varactor is used as a tuning element. Some of the
important parameters and specifications are
Tuning Sensitivity Slope of voltage controlled tuning characteristics in MHz/V
Output Power Maximum power available at the output of the oscillator Eg. 0dBm,
Harmonic Suppression Level of harmonics relative to the fundamental in dBc below the carrier
Spurious Content Level of spurious non-harmonic output signals relative to the oscillators output,
in dBc
SSB Phase noise Single side band phase noise in 1Hz bandwidth as a function of frequency offset
from the carrier relative to the carrier power in dBc/Hz
Phase Locked Loop
Video link: VCO & PLL
7.5
Mixer
A mixer is device used to multiply two signals of different frequencies, and in the process achieve
frequency translation. The mixer is a 3 port device that is symbolically represented as shown in
Figure 7.24. Its is used to multiply the RF signal VRF = A(t) cos ωct with a local oscillator signal
VLO = cos ωLOt leading to frequency components of ωc ± ωLO , i.e.,.
7.5 Mixer
111
112
Chapter 7. Active Devices
Figure 7.24: Circuit Schematic Symbol of a mixer.
Figure 7.25: Illustration of up- and down-conversion by a mixer.
Figure 7.26: A typical Super-hetrodyne Transceiver architecture.
VRF = A(t) cos ωct
VLO = cos ωLOt
1
VRF ×VLO = A(t) [cos(ωc − ωLO )t + cos(ωc + ωLO )t]
2
mixer the image frequency signal need to be eliminated or filtered out. Such filters are called image
filters. Such image filters can potentially introduce high insertion loss which can be detrimental to
the signal to noise ratio of an already weak RF signal that is received. Receiver architectures such as
Hartley technique or Weaver technique can be used to eliminate the need for image reject filters and
hence the associated insertion losses.
A direct down conversion receiver relies on using the intermediate frequency as zero and such
receiver architectures are also called as zero-IF receivers. IQ- implementation involving the in-phase
(I) and quadrature phase (Q) components, is also possible for phase modulation schemes.
In any non-linear device, the second order intermodulation product generates the product of two
signal. Thus a mixer uses the non-linear characteristics of the active element such as diode / transistor
to realize the mixing of two signals.
Any device with 2nd order non-linearities, when fed with the sum of the RF and LO signals as an
input i.e., with vi (t) = A cos ωRFt + B cos ωLOt results in output with certain spectral components that
is similar to the mixing operation. For instance,
vo (t) = f (vi (t)) = αo + α2 v2i (t)
= αo + α2 (A cos(ωRF t) + B cos(ωLOt)2
1
1
= αo + α2 (A2 + B2 ) + α2 (A2 cos(2ωRF t) + B2 cos(2ωLOt))
2 {z
|
} |2
{z
}
DC
Video link: Mixer
7.6
RF and LO harmonics
+ α2 AB cos(ωRF ± ωLO )t
{z
}
|
mixing operation
The component with frequency (ωRF − ωLO ) is the down converted component and the term with
frequency (ωRF + ωLO ) is the up converted component. This process of frequency conversion is
illustrated in Figure 7.25.
7.5.1
Image Frequency
A frequency component ωIM that is equally far from the local oscillator frequency ωLO as the RF
frequency ωRF but at the lower end of the spectrum, will map to the same IF frequency as the RF
signal upon mixing. In other words, when
ωRF − ωLO = ωLO − ωIM
(7.27)
Such a frequency ωIM is called the image frequency. Upon down-conversion in a heterodyne receiver,
the image frequency signal will interfere with the intended RF signal. For this reason, prior to the
Transceiver Architectures
A RF Transceiver has both transmit and receive chains. Duplexer is the key component enabling
same antenna to be used for both RF transmission and RF reception. Super-hetrodyne transceiver
architecture is shown in Figure 7.26 where IQ modulation/demodulation is done at the IF. A zero-IF
transceiver is an alternate architecture where the IQ modeulation/demondulation is carried out directly
at the RF as shown in Figure 7.27.
Video link: Transceiver Architectures
7.6 Transceiver Architectures
Figure 7.27: A typical zero-IF Transceiver architecture.
113
116
Chapter 8. Antennas and Propagation
8. Antennas and Propagation
Figure 8.2: Different types of antennas Images Source:Internet.
An antenna is both the “mouth” and “ears” of a wireless RF system used to transmit and receive RF
signals. Antennas are used to transmit (emit) and receive electromagnetic waves that can propagate
through free space. Transmit antenna converts power that is delivered to its circuit terminal into
electromagnetic waves while the receive antenna captures power from an electromagnetic wave and
provides it at its circuit terminal. This shown in Figure 8.1. An antenna has a fundamental important
property called reciprocity a property of a same passive antenna making it useful as both a transmit
or receive a antenna.
Antenna radiates electromagnetic energy into three-dimensional space. The characteristics of the
radiated signal are different depending on the different types of antennas. Figure 8.2 shows various
types of antenna used for various applications. The different types can be broadly classified into
•
•
•
•
•
•
•
Wire Antennas
Aperture Antennas
Microstrip Antennas
Reflector Antennas
Lens Antennas
Chip Antennas/Dielectric Resonators
Array Antennas
Figure 8.3: Antenna represented as an equivalent load impedance.
8.1
8.1.1
Antenna Parameters
Input Impedance
The antenna is represented as a equivalent load impedance, and can determine the power accepted by
the antenna. This is illustrated in Figure 8.3. Thus the antenna is treated as a single port network.
Therefore, one can define the parameters such as reflection coefficient, return loss and impedance
bandwidth.
1. Input Impedance is the load the antenna represents on the feeding transmission line. The input
impedance is represented as
Zant = Ra + jXa
(8.1)
The resistance of the antenna Ra represents the radiation in the form of power “loss”. The
reactance of the antenna represents stored energy that does not lead to radiated power.
2. Reflection Coefficient Based on the impedance of the antenna, the input reflection coefficient is
obtained as
Figure 8.1: Conversion of bounded signal into radiation at the transmitting antenna and back to
bounded signal at the receiving antenna.
Γa =
Zant − Z0
1 + Γa
⇒ Zant = Z0
Zant + Z0
1 − Γa
The magnitude of reflection coefficient is between 0 an 1 ( or between −∞dB and 0dB).
(8.2)
8.1 Antenna Parameters
117
118
Chapter 8. Antennas and Propagation
Figure 8.4: Antenna impedance and reflection coefficient is a function of frequency.
Figure 8.5: Frequency dependence of antenna impedance viewed in the Smith Chart.
3. Return Loss is the ratio of power input to power returned back by the antenna
RL = −10 log10 |Γa |2
(8.3)
Return loss is between 0dB and ∞dB. Return Loss of ∞dB implies perfect match meaning there
is no power returning back to the source.
4. VSWR Voltage Standing Wave Ratio which is measure of impedance mismatch due to the antenna
impedance connected as load to the transmission line.
VSWR =
1 + |Γa |
1 − |Γa |
(8.4)
Under the matched condition,
Γa = 0 = −∞ [dB]
RL = ∞ [dB]
VSWR = 1
5. -10dB Bandwidth Antenna impedance is a function of frequency and hence the reflection coefficient. A typical frequency response of antenna impedance and reflection coefficeient is shown
in Figure 8.4. The -10dB impedance bandwidth is defined as that range of frequency for which
the reflection coefficient is less than -10dB. Instead of viewing the complex impedance and reflection coefficient separately, the Smith chart allows viewing the two together in a single chart
as shown in Figure 8.5.
Example 8.1 For a particular Bluetooth antenna, the magnitude and phase of reflection coefficient
at a certain frequency measured using a 50Ω VNA, was found to be -10dB and 35◦ .
a. What is the VSWR of the antenna at this frequency?
b. What is the input-impedance of the antenna?
Γa [dB] = 10 log10 |Γa |2
= 20 log10 |Γa |
= −10dB
|Γa | = 10−10/20 = 0.316
1 + |Γa |
VSWR =
1 − |Γa |
1 + 0.316
=
1 − 0.316
= 1.92
Γa = 0.316∠35◦
= 0.259 + j0.181
1 + Γa
⇒ Za = Z0
1 − Γa
1 + (0.259 + j0.181)
= 50 ×
1 − (0.259 + j0.181)
= (77.31 + j31.13)Ω
⇒
■
Based on the impedance bandwidth antennas can be classified into three types namely,
1. Narrow-band antennas:
Narrow-band antennas have a narrow frequency band of operation. Such antennas are typically
resonant structures where the anetanna operates at the frequency where the reactance is zero.
This antennas are selective in frequency and act as filter suppressing out-off band signals inherently. Applications that use such narrow-band antennas are for wireless sensor networks such
as ZigBee, NB-IoT, BLE; for WLAN such as WiFi (2.4GHz, 5GHz) and in tags for UHF-RFID
applications. For narrow band antennas, the fractional bandwidth is defined as
■
Bfr =
fu − fl
× 100% < 10%
fo
is typically less than 10%. Examples of such narrow-band antennas include dipole, monopole,
trace antenna and chip antennas.
8.2 Radiation Parameters
119
120
Chapter 8. Antennas and Propagation
2. Broadband antennas:
When the ratio of upper cut-off and lower cut-off frequency is high, but less than factor of 2,
such antennas are called as broadband antennas. The applications of such antennas include
TV Antennas, Satellite Communication and Aerospace Applications. The Bandwidth ratio is
defined as
fu
<2:1
fl
Examples of such antennas include Horn antenna, Biconical Antenna, Helical Antenna, Yagiuda.
3. Ultrawideband antennas:
When ratio of upper cut-off and lower cut-off frequency is high, greater than factor of 2 such
antennas said to be ultrawideband antennas. The applications needing such antennas include
UWB radar, IEEE802.15.4a and impulse radios. For such antennas the bandwidth ratio defined
as
Figure 8.6: Nearfield and Farfield regions around an antenna.
fu
>2:1
fl
Examples of such antennas include TEM Horn antenna, Vivaldi Antenna, Printed antennas and
Spiral Antenna.
Video link: Antennas - Radiation parameters
8.2.1
Video link: Antennas - Introduction & Impedance
8.2
Radiation Parameters
Antennas radiate out electromagnetic fields into free-space. Space around an antenna has two possible
radiation characteristics
• Nearfield
It is the region in the physical vicinity of the antenna where the planewave approximation of
radiated field is not valid. The nearfield is of two kinds viz.,
Reactive Nearfield: The physical vicinity of the antenna where energy is stored in the form of
electric and magnetic energy (depending on the type of the antenna).
Radiative Nearfield: Around the Reactive nearfield, transition region towards farfield
Low-frequency RFID tags operate in the reactive nearfield region.
• Farfield
Farfield is the space beyond certain distance called the far-field distance from the antenna,
where electromagnetic energy propagates and the energy density decays by 1/r2 . Farfield distance d f for typical antennas is
2D2
df =
λ
Radiation characteristics of antennas in the farfield are essential for check and analysis of communication link budget. In the radiative farfield, the two-important characteristics are
• Radiation Pattern and
• Polarization
Radiation Pattern
Radiation pattern indicates the intensity of radiated power in a particular direction in 3D. Spherical
coordinate system is used to specify the radiation pattern characteristics. In the spherical coordinate
system, the electric field vectors have Er , Eθ and Eϕ components (and correspondingly Hr , Hθ and Hϕ
components for magnetic field). In the farfield, the electric and magnetic fields radiated by an antenna
have no radial component. The direction of propagation is in the radial direction r̂. Since the nature
of the wave is transverse electromagnetic, there is no component of the electric or the magnetic field
in the direction of propagation (radial direction). Thus,
Er (⃗r) = Hr (⃗r) = 0
where⃗r is any position vector in the farfield of the antenna.
⃗E(⃗r) = Eθ (⃗r)θ̂ + Eϕ (⃗r)ϕ̂
⃗ r) = Hθ (⃗r)θ̂ + Hϕ (⃗r)ϕ̂
H(⃗
(8.5)
(8.6)
The ratio of the magnitude of electric field to magnetic field, in the far-field, is equal to the intrinsic
impedance of free-space given as
η0 =
|⃗E(⃗r)|
=
⃗ r)|
|H(⃗
r
µ0
= 377Ω
ε0
where µ0 = 4π × 10−7 and ε0 = 8.854 × 10−12 are the permeability and permittivity of vacuum, respectively.
In the far-field, it is the power pattern that is specified instead of the field pattern. Power pattern
typically represents a plot of the square of the magnitude of the electric or magnetic field as a function
of the angular space. Power pattern is typically specified in dB. Depending on the radiated power of
the signal in different directions around the antenna, antennas can be classified into two types viz.,
8.2 Radiation Parameters
121
122
Chapter 8. Antennas and Propagation
Figure 8.7: 3-dimensional radiation pattern of a horn antenna.
Figure 8.8: 2-dimensional radiation pattern in the azimuth and elevation planes.
1. Isotropic Antennas:
Isotropic antennas have omni-directional radiation pattern meaning the antenna radiates equally
in all directions. The radiation is in the form of spherical waves with equal power flux density
(power per unit area) in all the direction. Such antennas are desired for use in mobile phones
and IoT device where the device may be oriented in any direction and still coverage/links with
the base station should be good regardless of the direction where the basestation is.
2. Directional Antennas:
Direction antennas on the other hand have a focused beam (with limited field-of-view). These
antennas radiate with higher power flux density in and around one particular direction while
radiating less in other directions. Thus the radiated power is higher in one direction at the cost
of lower radiation in the other directions. This is useful in applications such as radar antennas,
cellular base-station antennas etc., where particular direction of coverage is necessary and less
radiation occurs in the unnecessary directions. Figure 8.7 shows the directional radiation pattern
of a horn antenna at 10GHz.
Radiation pattern being defined in spherical coordinates are typically presented in principal (major) planes as either
1. Polar plots
2. Rectangular plots
The two principal planes are a) the elevation plane and b) the azimuth plane. Example of radiation
patterns in the two principal planes for the horn antenna, as polar plots, is shown in Figure 8.8. The
pattern can also be provided in rectangular plots with respect to the elevation or the azimuth angle as
shown in Figure 8.9.
The radiation characteristics of an antenna are frequency dependent. Antenna specifications provide the radiation characteristics at particular frequency points, usually at the intended frequency of
operation of the antenna. Some of the important radiation parameters are
1. Directivity: is the ratio of power density radiated in a particular direction (θ , ϕ ) at some distance
to the power density at the same point if the total power had been radiated “isotropically”.
Though directivity is a linear quantity being ratio of powers, is always expressed in dBi. dBi
refers to directivity in dB as compared to an isotropic radiator. Directivity of typical antennas
both in linear and dBi is shown in Table. 8.1. Most often the angle is not specified when
directivity value of antenna is given. In that case, it is implicitly implied that the provided
directivity is the direction of peak radiation. Directivity of 100 i.e. 20dBi (dB isotropic) implies
peak directivity of the antenna, meaning the antenna radiates 100 times the power as an isotropic
antenna, in the direction of the main beam.
2. Gain: is the ratio of power density radiated in a particular direction (θ , ϕ ) at some distance to the
total power accepted by the antenna, Pacc . Again, though a dimensionless linear quantity, gain
Figure 8.9: 2-dimensional radiation pattern as a rectanglular plot.
Figure 8.10: Directivity of a non-isotropic (directional) antenna.
8.2 Radiation Parameters
123
Antenna
Directivity [dBi]
Directivity
ear)
Hertzian Dipole
λ /2 dipole
λ /4 monopole
Patch Antenna
Log-periodic dipole
Horn antenna
Parabolic Dish
1.76 dBi
2.15 dBi
5.15dBi
6 dBi
7dBi
20dBi
> 30 dBi
1.5
1.64
3.28
4
5
100
> 1000
124
Chapter 8. Antennas and Propagation
(lin-
Table 8.1: Directivity of common antennas
Figure 8.12: Half Power beamwidth in one of the principal planes.
When the ohmic losses (conductors) and dielectric losses in the antenna is ignored,
Pabs = 0
Pacc = Prad
⇒
⇒ η = (1 − |Γa |2 )
⇒ G(θ , ϕ ) = (1 − |Γa |2 )D(θ , ϕ )
Figure 8.11: Power accepted by the antenna is mainly radiated out and partly lost in (absorbed by)
the antenna.
is expressed in dB. Note that the power accepted by the antenna, Pacc need not be completely radiated by the antenna. Depending on the properties of the materials used to realize the antenna,
part of the accepted power can be lost in the antenna structure (eg. Ohmic loss). This power is
indicated as Pabs .
Pacc = Pabs + Prad
(8.7)
The upper bound of the gain of the antenna is its directivity. The maximum value of the gain
that an antenna can achieve is therefore its directivity, when the losses is zero and when there
is a perfect match condition.
3. Efficiency: is the ratio of antenna gain to its directivity. The efficiency is the measure of RF power
losses (absorbed) in the antenna structure. Losses can be due to resistive losses in conductors,
dielectric losses and cable mismatch losses. Ideally, if all the accepted power is radiated completely then the antenna efficiency is said to be 100%. However in reality, some of the accepted
power is lost (dissipated) within the antenna (as heat) and the efficiency is much lower. In this
case while the directivity is high, the antenna gain will be lower. Efficiency in terms of antenna
reflection coefficient is obtained as
Pacc = (1 − |Γa |2 )Pin
Prad
Prad
Prad
η=
= (1 − |Γa |2 )
= (1 − |Γa |2 )
Pin
Pacc
Pabs + Prad
(8.8)
(8.9)
EIRP(θ , ϕ ) = Pin + G(θ , ϕ ) − L
(8.10)
(8.11)
where L is the losses in the antenna feeder cable. Gain and EIRP are usually specified without
angular information and refers to the peak gain and peak EIRP. A 1,000-watt transmitter feeding
an antenna with a gain of 4 (6 dBi) same EIRP as a 4,000-watt transmitter feeding an antenna
with a gain of 1 (0 dBi).
6. TRP: Total Radiated Power (TRP) is the radiated power over the entire 3-dimensional space
around the antenna (and is same as Prad ). It is obtained from the EIRP as
TRP =
1
4π
Z 2π Z π
0
0
EIRP(θ , ϕ ) sin θ d θ d ϕ
(8.12)
TRP is less than transmit power Pin due to losses in the antenna system.
7. Effective Area ( Effective Aperture) : Effective area is used to define an equivalent area of antenna (in m2 ) that relates the received power (W) in the antenna terminals to the power density
of incident wave (W/m2 ) that enters the antenna aperture.
λ2
G(θ , ϕ )
(8.13)
4π
The effective aperture is related to the physical size of the aperture through the antenna efficiency as
Ae =
Ae = η A p
and efficiency in terms of gain and directivity is
G(θ , ϕ ) = η D(θ , ϕ )
4. HPBW: Half-power beam-width is the angular width when the pattern is half the power of the
main lobe power (-3dB). It is illustrated in Figure 8.12 where the HPBW is around 2 × 14◦ =
28◦ . Note that the HPBW is in general different for the elevation and the azimuth planes.
HPBW is a parameter useful only for directional antennas.
5. EIRP: Effective Isotropic Radiated Power (EIRP) is the product of realized gain and input power.
In dB it is given as
where A p is the physical area of the antenna aperture.
(8.14)
8.3 Friss Transmission Equation
125
Figure 8.13: Linear and Circular Polarization.
8.2.2
126
Chapter 8. Antennas and Propagation
Figure 8.14: A linearly polarized antenna receives only the co-polarized signal and doesnot pick-up
the cross-polarized signal.
Polarization
Polarization of electromagnetic waves is a property of EM energy that describes the time-varying
direction of the electric field, as observed along the direction of propagation. There are two type of
polarization viz.,.
Linear Polarization: Electric field vector is always directed along fixed direction which is defined
as the polarization vector of the wave.
Circular Polarization: Direction of the Electric field vector is rotating with time1 . Circular polarization can be further classified into right-hand circular polarization (RHCP) and left-hand circular
polarization (LHCP) depending on the direction of rotation of the electric field vector.
Figure 8.13 shows a time-snapshot of both linear and circular polarization. The electric field vector
is shown in red and magnetic field vector in blue. The circular polarization shown is of right-hand
circular.
Polarization of antenna is polarization of the locally plane wave that is radiated/received in/from a
specified direction in the far-field. A polarized antenna has radiation pattern specific to certain polarization. For example the GPS antenna receiver is right-hand circularly polarized since the GPS signal
transmitted by the satellites are RHCP. Co-polarization represents the polarization the antenna is
intended to radiate (receive) while cross-polarization represents the polarization orthogonal to a specified polarization, which is usually the co-polarization. Thus for a GPS antenna the co-polarization
is RHCP and the cross-polarization is LHCP. The antenna receives strongly the co-polarization while
doesnot pick up the cross-polarization. For the case of a linear dipole this is illustrated in Figure 8.14.
Figure 8.15: Friss Transmission Equation is the relationship between transmitted and received power.
distance between the antennas.
Let the input power at the transmitter antenna terminal be Pt [W].
Power density at distance R if the power Pt is radiated isotropically,
W0 =
Pt
4π R2
[W/m2 ]
(8.15)
Power density at distance R in a particular direction (θ , ϕ ) when radiated by a non-isotropic transmit
antenna is
Wt =
Pt Gt (θt , ϕt )
4π R2
[W/m2 ]
(8.16)
where Gt (θt , ϕt ) is the transmit antenna gain in the (θt , ϕt ) direction. The power density due to a
directional antenna increases by the antenna gain as illustrated in Figure 8.16.
If Ae,r is the antenna effective area of the receiver antenna at a distance R, power at the receiver
antenna terminal is
Video link: Antennas - Radiation characteristics
8.3
Pr = Wt Ae,r =
Pt Gt (θt , ϕt )Ae,r
4π R2
[W]
(8.17)
Friss Transmission Equation
In a communication system consisting of transmitter, wireless channel and the receiver, the performance of the communication link depends on the transmit power and the corresponding received
power. The relation between the transmit power and the received power is given by the Friss Transmission Equation. The relationship takes into account the gain, the frequency of operation and the
1 Circular
polarization is infact a special case of elliptic polarization.
Figure 8.16: Power density at a distance R due to an isotropic antenna and a directional antenna.
8.3 Friss Transmission Equation
127
128
Chapter 8. Antennas and Propagation
The effective area is related to the Gain given by 8.13.
Ae,r =
λ2
Gr (θr , ϕr )
4π
The received power in terms of the transmit power is then obtained as
λ2
Pr
=
Gt (θt , ϕt )Gr (θr , ϕr )
Pt
(4π R)2
λ 2
= ηt ηr
Dt (θt , ϕt )Dr (θr , ϕr )
4π R
(8.18)
Figure 8.17: Bistatic and Monostatic Radar.
(8.19)
2
Eq. 8.18 is called the Friss Transmission equation. The factor 4πλ R is called the free-space loss
factor. It takes into account the losses due to the spherical spreading of the energy by the antenna.
Free-Space Path loss in dB,
λ 2
Lfs = −10 log10
4π R
4π R
= 20 log10
λ
8.4
Radar Range Equation
Radar system is used to detect the position of a target by transmitting electromagnetic radiation and
receiving the signal reflected back by the target. Reflectivity of target, called as the Radar Cross
Section (RCS) represents the amount of incident power reflected back my a target in certain direction.
RCS has units of m2 , since it represents an effective area that reflects certain power for a certain
incident power density and is defined as
(8.20)
σ = lim 4π R2
(8.21)
R→∞
|Esca |2
|Einc |2
There are two types of Radar viz.,
1. Bistatic Radar: The transmitter and receiver are at two different locations
2. Monostatic Radar: Both the transmitter and receiver in the same system (at the same location)
Both the radar types are shown in Figure 8.17.
■ Example 8.2 Two lossless X-band (8.2-12.4 GHz) horn antennas are separated by a distance of
100λ . The reflection coefficients at the terminals of the transmitting and receiving antennas are 0.1
and 0.2, respectively. The maximum directivities of the transmitting and receiving antennas (over
isotropic) are 16 dB and 20 dB, respectively. Assuming that the input power in the lossless transmission line connected to the transmitting antenna is 2W, find the power delivered to the load of the
receiver.
Example 8.3 A maritime Radar for navigation uses the X-Band at 9.5GHz. What is the free-space
path loss for a distance of 11km?
■
Since the directivities of the transmit and receive antennas are given, we first obtain the gain and
then apply the Friss Transmission Equation given by eq 8.18.
λ = c/ f = 0.0316m
0.03162
free space path loss, Lfs = −10 log10
3
2
(4π × 11 × 10 )
= −10 log10 5.23 × 10−14
= 132.8 dB
Dt = 16dB = 1016/10 = 39.81
Dr = 20dB = 1020/10 = 100.00
Gt = (1 − |Γt |2 )Dt
Gr = (1 − |Γr |2 )Dr
■
λ2
Pr = (1 − |Γt | )(1 − |Γr | )Dt Dr
Pt
(4π 100λ )2
2
2
= (1 − 0.12 ) × (1 − 0.22 ) × 39.81 × 100 ×
Exercise 8.1 Show from first principles, that the range of a monostatic radar, R is related to the
transmit and received power (Pt and Pr ) and other relevant radar system parameters as
1
×2
(4π 100)2
R4 =
= 4.777mW
where σ is the radar cross section of the target.
■
8.5
Video link: Antennas - Friis Transmission Equation
Pt λ 2 G2
σ
Pr (4π )3
■
Antenna Types and Design
Antenna design involves design and integration on antennas and corresponding matching network to
match with the RF transceiver. For most cases, standard antennas are available. When optimal RF
system performance is necessary, custom antenna with desired radiation characteristics would need
to be designed.
8.5 Antenna Types and Design
129
130
Chapter 8. Antennas and Propagation
Figure 8.19: Characteristics of a dipole antenna.
Figure 8.18: Different types of wire antennas.
Figure 8.20: Characteristics of a monopole antenna.
8.5.1
Wire Antennas
The basic antenna type is a wire antenna basically the current carrying conductor of the transmission
line is extended and adapted as an antenna. Various kinds of wire antennas are shown Figure 8.18. Of
particular interest is the dipole and monopole antennas as these are widely used. Yagi-Uda antennas
are used for commercial TV broadcast. Biconical and Log-periodic antennas are wideband antennas
used typically in electromagnetic compatibility related measurements.
The dipole antenna consists of two conductors or arms that are connected directly to a balanced
transmission line such as a two-wire line as shown in Figure 8.19. The total length of the dipole
antenna including both the arms is around λ /2. At this length or rather at the particular frequency
where the physical length of the antenna corresponds to λ /2, the antenna resonates. In Figure 8.19,
the current distribution along the dipole arms is shown. It is to be noted that towards the end tips of
both the arms, the current zero since there is no more conductor available for the charges to flow. A
the center of the dipole arm is the maximum current. The current distribution thus corresponds length
of λ /2. At the resonant frequency the reactance of the antenna is zero. At the resonance frequency,
the antenna resistance is 73.2Ω. This is shown in the Smith Chart in Figure 8.19. In terms of the
radiation pattern, since the antenna structure is rotationally symmetric, the resulting pattern is also
rotationally symmetric along the axis of the dipole arm. In the elevation plane, the dipole exhibits
a figure of 8 pattern. Thus the 3d pattern looks like a donut. The directivity of the dipole (at the
operating frequency) is 2.15dBi. The feed transmission line is typically a balanced transmission line.
If an unbalanced transmission line like a coaxial line is to be used, then a balun additionally is needed.
A monopole antenna is an adaptation of the dipole antenna. The physical length of the wire antenna is quarter wavelength or λ /4 long and is over a ground plane (perfect electrical conductor). Due
to the ground plane, by image theory2 , the resonant frequency is the same as that of a corresponding
half-wavelength dipole. The current distribution of monopole antenna over a ground plane have the
same current distribution as a dipole antenna is shown in Figure 8.20. The antenna resistance at the
resonant frequency is 36.6Ω, which is exactly half that of the corresponding dipole. Also shown in
Figure 8.20 is the radiation pattern. When the ground plane is infinitely large, all the radiation happens only in the upper half-space. Thus the radiation in the upper half-space is twice that of what a
dipole would have radiated in that region. Thus the directivity is 5.15dbi which is exactly 3dB more
2 Refer
to TLM1006 notes on image theory
than the directivity of a dipole. Monopole antennas are more popular because of easier feed using
coaxial line directly without the need for balun. The inner conductor of the coaxial line extends as
the monopole arm while the ground of the coaxial line is connected to the ground plane. In reality, an
infinite ground plane of course is not feasible. Typically ground plane size sufficiently large would be
needed to realized the radiation characteristics of a monopole.
8.5.2
Planar Antennas
Planar antennas are used in printed circuit boards and are also called as printed antennas. The printed
metal conductor can either be a wire realized as a trace of copper or can be a planar surface called as
a patch.
Patch antennas are also referred to as microstrip antennas. Such antennas are two-dimensional
metallic structures on a dielectric substrate with a ground plane on the down side of the substrate.
The dimensions of the patch determine its operating frequency. In the case of rectangular patch
antenna, for certain dimensions of length L, a resonance is set-up at a particular frequency. The
resonant frequency is the operating frequency of the patch and is given as
c
f=
√
2(L + h) εr,eff
Length L is approximately half the wavelength. εr,eff is the effective relative permittivity given as
εr + 1 εr − 1
12h −0.5
εr,eff =
+
1+
2
2
W
where εr is the dielectric constant of the substrate. FR4 is a low-cost PCB substrate that is widely
used and has a dielectric constant of 4.5. Width W of the rectangular patch determines the bandwidth
and typically, L ≤ W ≤ 2L. A simple rectangular patch antenna with quarterwave transformer for the
imepdance matching is shown in Figure ??.
Rectangular patch can be adapted to realize circularly polarized patch antenna. Such antennas find
applications in GPS receivers where the GPS signals transmitted by satellites in constellation around
earth are circularly polarized.
8.5 Antenna Types and Design
131
Figure 8.21: Microstrip Patch antenna. Length determines the resonant frequency and width determines the bandwidth.