Vortex Methods
The goal of this book is to present and analyze vortex methods as a tool for the
direct numerical simulation of incompressible viscous flows.
Vortex methods have matured in recent years, offering an interesting alternative to finite-difference and spectral methods for high-resolution numerical
solutions of the Navier-Stokes equations. In the past two decades research in
the numerical analysis aspects of vortex methods has provided a solid mathematical background for understanding the convergence features of the method
and several new tools have been developed to generalize its application. At the
same time vortex methods retain their appealing physical character that was the
motivation for their introduction.
Scientists working in the areas of numerical analysis andfluidmechanics will
benefit from this book, which may serve both communities as both a reference
monograph and a textbook for computational fluid dynamics courses.
Georges-Henri Cottet received his Ph.D. and These d'Etat in Applied Mathematics from Universite Pierre et Marie Curie in Paris. He is currently professor
of mathematics at the Universite Joseph Fourier in Grenoble, France.
Petros Koumoutsakos received his Ph.D. in aeronautics and applied mathematics from the California Institute of Technology. He is currently a professor at
ETH-Zurich and a senior research fellow at the Center for Turbulence Research
at NASA Ames/Stanford University.
Vortex Methods:
Theory and Practice
GEORGES-HENRI COTTET
Universite Joseph Fourier in Grenoble
PETROS D. KOUMOUTSAKOS
ETH-ZUrich
and
CTR, NASA Ames/Stanford University
CAMBRIDGE
UNIVERSITY PRESS
PUBLISHED BY THE PRESS SYNDICATE OF THE UNIVERSITY OF CAMBRIDGE
The Pitt Building, Trumpington Street, Cambridge, United Kingdom
CAMBRIDGE UNIVERSITY PRESS
The Edinburgh Building, Cambridge CB2 2RU, UK http://www.cup.cam.ac.uk
40 West 20th Street, New York, NY 10011-4211, USA http://www.cup.org
10 Stamford Road, Oakleigh, Melbourne 3166, Australia
Ruiz de Alarcon 13, 28014 Madrid, Spain
© Cambridge University Press 2000
This book is in copyright. Subject to statutory exception
and to the provisions of relevant collective licensing agreements,
no reproduction of any part may take place without
the written permission of Cambridge University Press.
First published 2000
Typeface in Times Roman 10/13 pt. System I4TEX 2£ [TB]
A catalog record for this book is available from
the British Library.
Library of Congress Cataloging in Publication Data
Cottet, G.-H. (Georges-Henri). 1956Vortex methods: theory and practice / Georges-Henri Cottet.
Petros D. Koumoutsakos.
p.
cm.
ISBN 0-521-62186-0
1. Navier-Stokes equations-Numerical solutions. 2. Vortex-motion.
I. Koumoutsakos, Petros D. II. Title.
1999
QA925.C68
532/.0533/01515353-dc21
ISBN 0 521 62186 0 hardback
Transferred to digital printing 2004
99-12277
CIP
Contents
Preface
1
1.1
1.2
1.3
Definitions and Governing Equations
Kinematics of Vorticity
Dynamics of Vorticity
Helmholtz's and Kelvin's Laws
for Vorticity Dynamics
2
Vortex Methods for Two-Dimensional Flows
2.1 An Introduction to Two-Dimensional Vortex Methods:
Vortex Sheet Computations
2.2 General Definition
2.3 Cutoff Examples and Construction
of Mollified Kernels
2.4 Particle Initializations
2.5 The Case of No-Through-Flow or Periodic
Boundary Conditions
2.6 Convergence and Conservation Properties
3
3.1
3.2
3.3
3.4
Three-Dimensional Vortex Methods
for Inviscid Flows
Vortex Particle Methods
Vortex Filament Methods
Convergence Results
The Problem of the Vorticity Divergence for Vortex
Particle Methods
page ix
1
2
5
7
10
10
18
22
26
31
34
55
56
61
75
84
vi
4
4.1
4.2
4.3
4.4
4.5
5
5.1
5.2
5.3
5.4
5.5
5.6
Contents
Inviscid Boundary Conditions
Kinematic Boundary Conditions
Kinematics I : The Helmholtz Decomposition
Kinematics II: The \P-UJ and the u-u; Formulations
Discretization of the Integral Equations
Accuracy Issues Related to the Regularization
near the Boundary
90
92
92
96
110
Viscous Vortex Methods
Viscous Splitting of the Navier-Stokes Equations
Random-Walk Methods
Resampling Methods
The Method of Particle Strength Exchange
Other Redistribution Schemes
Subgrid-scale Modeling in Vortex Methods
121
124
130
141
145
159
164
Vorticity Boundary Conditions for the
Navier-Stokes Equations
6.1 The No-Slip Boundary Condition
6.2 Vorticity Boundary Conditions for the
Continuous Problem
6.3 Viscous Splitting Algorithms
114
6
172
174
179
181
7
Lagrangian Grid Distortions: Problems and Solutions
7.1 Circulation Processing Schemes
7.2 Location Processing Techniques
206
208
219
8
8.1
8.2
8.3
237
238
244
251
Hybrid Methods
Assignment and Interpolation Schemes
Vortex-In-Cell Methods
Eulerian-Lagrangian Domain Decomposition
Appendix A Mathematical Tools for the Numerical Analysis
of Vortex Methods
A. 1 Data Particle Approximation
A.2 Classical and Measure Solutions to Linear
Advection Equations
A.3 Mathematical Facts about the Flow Equations
261
262
267
278
Contents
B.I
B.2
B.3
B.4
Appendix B Fast Multipole Methods for Three-Dimensional
N-Body Problems
Multipole Expansions
The Poisson Integral Method
Computational Cost
Tree Data Structures
vii
284
286
291
293
294
Bibliography
301
Index
311
Preface
The goal of this book is to present and analyze vortex methods as a tool for
the direct numerical simulation of incompressible viscous flows. Its intended
audience is scientists working in the areas of numerical analysis and fluid mechanics. Our hope is that this book may serve both communities as a reference
monograph and as a textbook in a course of computational fluid dynamics in
the schools of applied mathematics and engineering.
Vortex methods are based on the discretization of the vorticity field and the
Lagrangian description of the governing equations that, when solved, determine the evolution of the computational elements. Classical vortex methods
enjoy advantages such as the use of computational elements only in cases in
which the vorticity field is nonzero, the automatic adaptivity of the computational elements, and the rigorous treatment of boundary conditions at infinity.
Until recently, disadvantages such as the computational cost and the inability
to treat accurately viscous effects had limited their application to modeling the
evolution of the vorticity field of unsteady high Reynolds number flows with
a few tens to a few thousands computational elements. These difficulties have
been overcome with the advent of fast summation algorithms that have optimized the computational cost and recent developments in numerical analysis
that allow for the accurate treatment of viscous effects. Vortex methods have
reached today a level of maturity, offering an interesting alternative to finitedifference and spectral methods for high-resolution numerical solutions of the
Navier-Stokes equations. In the past two decades research in numerical analysis aspects of vortex methods has provided a solid mathematical background
for understanding the accuracy and the stability of the method. At the same
time vortex methods retain their appealing physical character that, we believe,
was the motivation for their introduction.
IX
x
Preface
Historically, simulations with vortex methods date back to the 1930s, with
Rosenhead's calculations by hand of the Kelvin-Helmholtz instabilities. For
several decades the grid-free character and the physical attributes of vortex
methods were exploited in the simulation of unsteady separated flows. Simultaneously, the close relative of vortex methods, the surface singularity (panel)
methods were developed and still remain as a powerful engineering tool for the
prediction of loads in aerodynamic configurations. The modern developments
of vortex methods originate in the works of Chorin in the 1970s (in particular for
the design of random-walk methods), and in the three-dimensional calculations
of Leonard (in the USA) and Rehbach (in France). These numerical works soon
motivated the interest of applied mathematicians for understanding the convergence properties of these methods in the early 1980s. The very first complete
convergence analysis was done in the USA by Hald, followed by Beale and
Majda. In Europe, at about the same time, the group of Raviart undertook this
research in parallel with the analysis of particle methods for plasma physics.
The past two decades have seen significant developments in the design of fast
multiple methods for the efficient evaluation of the velocity field by Greengard
and Rohklin; design and numerical analysis of new accurate methods for the
treatment of viscous effects (in the group of Raviart); a number of benchmark
applications demonstrating the capabilities of vortex methods for Direct Numerical Simulations of unsteady separated flows in Leonard's group at Caltech;
and finally a deeper understanding of convergence properties, with convergence
proofs of random-walk methods by Long and Goodman, and convergence proof
for point vortex methods by Hou and co-workers. In this book we discuss these
recent developments by mixing as much as possible the points of view of numerical analysis and fluid mechanics. We indeed believe that a remarkable feature
of vortex methods is that, unlike other numerical methods, such as finite differences and finite elements, they are fundamentally linked to the physics they
aim to reproduce.
Concerning the numerical analysis in the inviscid case, several approaches
are now available since the pioneering work of Hald. In this book we focus
on a convergence proof based on the tools developed approximately 10 years
ago around the concept of weak solutions to advection equations in distribution spaces. There are three reasons that motivated this choice: the notion of
weak measure solution is the central mathematical concept in particle methods;
second, within this framework the convergence analysis is inherently linked
to the structure of the equations, and it applies in many apparently different
situations: two- and three-dimensional grid-free methods, including vortex filament methods, and vortex-in-cell methods. Convergence properties of contour
Preface
xi
dynamics methods, which are not explicitly covered in this book, are also easily
understood with these tools. Finally, we believe that the present convergence
proof gives optimal results, in particular with respect to the smoothness of the
flow, leading to error estimates similar to those of more traditional numerical
methods. In Chapter 2 we present this convergence theory for two-dimensional
inviscid flows.
Throughout the book, we have tried to maintain a balance between plain
numerical analysis and a more qualitative description of the methods. We
have given particular attention to conservation properties that are essential in
the design of vortex methods. For instance, the energy conservation in twodimensional schemes, which follows from the Hamiltonian character of the
particle motion, is a feature that distinguishes vortex methods from Eulerian
schemes. For three-dimensional schemes, covered in Chapter 3, the conservation of circulation has long been an argument in favor of vortex filament methods
against the vortex particle methods. We discuss several ways now available to
enforce conservation in this second class of methods. We also address practical
issues related to the constraint of divergence-free vorticity fields when using
vortex particles in three dimensions.
In Chapter 4 we discuss boundary conditions for inviscid flow vortex simulations. We present this in a formal way by considering the Poincare identity that
basically provides the kinematic boundary conditions (no-through-flow) for the
Biot-Savart law for flows around solid boundaries. We discuss the method of
surface singularities and panel methods as special types of vortex methods. The
incorporation of these techniques along with vortex shedding models and the
Kutta condition in engineering calculations is discussed.
For viscousflows,besides the popular random-walk method, we have emphasized in Chapter 5 the so-called deterministic vortex methods. These schemes,
started at Ecole Polytechnique in 1983, have now given rise to several variants.
Applications for two- and three-dimensional flows demonstrate the practicality
of viscous schemes and demonstrate the ability of vortex methods to simulate
viscous effects accurately, while maintaining the Lagrangian character of the
method. Concerning the numerical analysis, we postulate that convergence for
the Navier-Stokes equations can be understood in the light of convergence
for the Euler equations and for linear convection-diffusion equations. This
approach is somewhat biased, as the technical difficulties in the numerical
analysis for the full Navier-Stokes equations are much more than the sum of
difficulties for the Euler and linear equations, but it makes the presentation
more cohesive. We thus focused our attention on linear convection-diffusion
equations.
xii
Preface
In Chapter 6 we discuss viscous vortex methods for flows evolving in a domain containing solid boundaries. Here the proof of convergence is a far less
easy task. It is possible to carry out a numerical analysis, but at the cost of
doing constructions (like extending the vorticity support outside the domain)
that are not possible for practical applications. We have thus preferred to stress
here the difficulties and indicate various attempts to overcome them. To our
knowledge there is no completely satisfactory solution for general geometries,
in particular because of the need to regularize vortices near the boundary. This
problem, already present for inviscid flows, is even more crucial for viscous
flows since one has to design, and to implement in the context of a viscous
scheme, vorticity boundary conditions. In that context we discuss the no-slip
boundary condition and its equivalence with the vorticity boundary condition.
We emphasize the case of Neumann-type conditions and investigate their links
with classical vorticity generation algorithms. Integral techniques for the implementation of these boundary conditions are then presented and illustrated
by applications of vortex methods in the direct numerical simulation of bluff
body flows.
In Chapter 7 we discuss the issue of particle distortion inherent in all Lagrangian methods. We argue the necessity of maintaining a somewhat regular
Lagrangian grid, from the point of view of numerical analysis, as well as of its
practical ramifications. We present methodologies to achieve this goal either
by manipulating the particle locations or by processing the circulation of the
particles.
In Chapters 4 and 6 we stress the difficulties of vortex methods in dealing
with boundedflows.We are indeed convinced that one can get most of the power
of vortex methods by combining them, in what we would call hybrid schemes,
with Eulerian methods that precisely may avoid difficulties inherent in particle
methods near boundaries. A broad class of hybrid schemes, including domain
decomposition techniques, is described and illustrated in Chapter 8.
Chapter 1 is an introduction to the notation and the main properties of incompressible fluids. Finally, in the appendices we have included some key concepts
of numerical analysis that would help make this book self contained. We have
also included a description of what we consider the muscle of vortex methods,
the fast summation technique.
As afinalthought, we stress that in this book we do not attempt a thorough review of the progress in vortex methods and their applications in the past decades.
In particular, applications to the important field of reacting and compressible
flows or free surface flows are not explicitly covered. For this we refer to the
proceedings [9, 10, 11, 22, 39, 87] of the workshops that have been devoted
since 1987 to vortex methods and, more generally, vortex dynamics. We hope,
Acknowledgment
xiii
however, that the book demonstrates some important recent advances in these
methods and helps make them recognized as a valuable tool in computational
fluid dynamics.
Grenoble,
Zurich,
December 1998.
Acknowledgment
We are indebted to many of our colleagues for their path breaking and continuing
research efforts in the fields of numerical analysis and flow simulation using
particle and vortex methods. We have been fortunate to be exposed to their
works through conferences and publications and we hope in return to contribute
to their efforts with this book.
We wish to express our gratitude to the people who have contributed directly
to this project, by correcting earlier versions of the manuscript, by providing us
with stimulating suggestions, and by graciously making available illustrations
from their work: Nikolaus Adams, Jonathan Freund, Ahmed Ghoniem, Ron
Henderson, Robert Krasny, Tony Leonard, Tom Lundgren, Sylvie Mas-Gallic,
Eckart Meiburg, Iraj Mortazavi, Monika Nitsche, Mohamed Lemine OuldSalihi, Bartosz Protas, Karim Shariff, John Strain, Jens Walther, and Gregoire
Winckelmans.
Furthermore, we have benefited tremendously and wish to deeply acknowledge the resources and the spirited environment created by our colleagues at
the Laboratoire de Modelisation et Calcul at the University Joseph Fourier in
Grenoble, the Institute for Fluid Dynamics at ETH Zurich, and the Center for
Turbulence Research at NASA Ames and Stanford University.
We wish to thank Alan Harvey of Cambridge University Press for his indispensable enthusiasm and care throughout this project and TechBooks for their
patience and professionalism during production of the book.
This book is dedicated to Catherine, Giulia, Helene, Martin, Ann-Louise and
Sophie for guiding us through this and many other adventures with their love.
Definitions and Governing Equations
Vorticity plays an important role in fluid dynamics analysis, and in many cases
it is advantageous to describe dynamic events in aflowin terms of the evolution
of the vorticity field.
The vorticity field (u) is related to the velocity field (u) of a flow as
u; = V x u.
(1.0.1)
It follows from this definition that vorticity is a solenoidal field:
V-u; = 0.
(1.0.2)
In a Cartesian coordinate system (x, y, z) this relation yields the following
relationships between the velocity componenets (ux, uy, uz) and the vorticity
components (cox, cjoy,coz):
duz
duy
IT
~
-T-'
ay
az
w
dux
duz
y = oz
IT - ox
1T>
duy dux
^ = ox
IT ~oyIT-
(L0 3)
-
In two dimensions the vorticity field has only one nonzero component (coz)
orthogonal to the (x, y) plane, thus automatically satisfying solenoidal condition
(1.0.2).
The circulation F of the vorticity field around a closed curve L, surrounding
a surface S with unit normal n is defined by
=
JL
u-dr
= /
JS
u-ndS,
(1.0.4)
where dx denotes an element of the curve.
There are several physical interpretations of the definition of vorticity. We
will adopt the point of view that vorticity is a solid-body-like rotation that can
1
2
1. Definitions and Governing Equations
be imparted to the elements because of a stress distribution in the fluid. Hence
when we consider a vorticity-carrying fluid element, the increment of angular
velocity (dQ) across an infinitesimal distance (dr) over the element is given by
dQ = -uxdr.
(1.0.5)
When we can track the translation and deformation of vorticity-carrying fluid
elements, because of the kinematics and dynamics of the flow field we are able
to obtain a complete description of the flow field. Considering the vorticitycarrying fluid elements as computational elements is the basis of the vortex
methods that we analyze in this book. The close link of numerics and physics is
the essense of vortex methods, and it is a point of view that will be emphasized
throughout this book.
In this introductory chapter we present fundamental definitions and equations relating to the kinematics and the dynamics of the vorticity field. In Section 1.1 we introduce the description offlowphenomena in terms of Eulerian and
Lagrangian points of view. Using these two descriptions, we present in Section 1.2 the dynamic laws governing the evolution of the vorticity field in a
viscous, incompressible flow field. In Section 1.3 we present Helmholtz's and
Kelvin's laws governing the motion of the vorticity field.
1.1. Kinematics of Vorticity
There are two different ways of expressing the behavior of the fluid that may
be classified as the Lagrangian and the Eulerian point of view. Their difference
lies in the choice of coordinates we wish to use to describe flow phenomena.
7.7.7. Lagrangian Description
When thefluidis viewed as a collection offluidelements that are freely translating, rotating, and deforming, then we may identify the dependent quantities of
theflowfield(such as the velocity, temperature, etc.) with these individual fluid
elements. In that sense the Lagrangian viewpoint is a natural extension of particle mechanics. To obtain a full description of theflowwe need to identify the initial location of the fluid elements and the initial value of the dependent variable.
The independent variables are then the initial location of a point (x°p) and time
(T). By following the trajectories of the collection offluidelements, we are able
to sample at every location in space and instant in time the quantity of interest.
The primary flow quantity in this description is the velocity of the individual
fluid elements. The velocity of a fluid element that is residing in an inertial
1.1. Kinematics of Vorticity
frame of reference at Xp is expressed as
a....)
The acceleration of a fluid particle in a Lagrangian frame is expressed as
The Lagrangian description is ideally suited to describing phenomena in
terms of the vorticity of the flow field.
1.1.2. Eulerian Description
In this description of theflow,our observation point is fixed at a certain location
x of the flow field. The flow quantities as they are changing with time t are
considered as functions of x. Unlike in Lagrangian methods the location of our
observation point remains unchanged by time, and it is the change of the values
of the dependent variables at the observation point that describes theflowfield.
The Eulerian and the Lagrangian quantities of the flow are related as
x = X(x°,T),
(1.1.3)
t = T.
(1.1.4)
The Eulerian description of the flow is the most commonly used method to
describe flow phenomena in the fluid mechanics literature. In this description,
individual fluid elements and their history are not tracked explicitly, but rather
it is the global picture of the field that is changing with time that provides us
with the description of the flow.
1.1.3. The Material Derivative
The material derivative allows us to relate the Eulerian and the Lagrangian time
derivatives of a dependent variable. Let Q be a quantity of the flow expressed
in a Lagrangian frame as Q(x°, T)and let q be the same quantity expressed in
an Eulerian frame, that is, q(x, t). Then we would have that
Q(x°,T) = q[x = X(x°,T)9t].
(1.1.5)
4
1. Definitions and Governing Equations
So the rate of change of Q with time T may be related to the rate change of q
with time t with the chain rule for differentiation as
dT
dx ' dT
dt dT'
and since we have for the velocity of a fluid particle that u = dx/dT then
d
Q = di
dT
dt
+ uM.
dx
( u.7)
The first term is the local rate of change of a variable, and the second term is the
convective change of the dependent variable. The substantial derivative (i.e.,
the rate of change of quantity in a Lagrangian frame) is a convenient way of
understanding several phenomena in fluid mechanics, and Stokes has given it
a special symbol:
From the definition of the substantial derivative we may easily see then that
£ - »•
We may also determine the rate of change of a material line element (dr) by
using the definition of the substantial derivative as
Dt
= du = djudrj = drVu.
(1.1.10)
1.1.4. Reynold's Transport Theorem
As an illustrative example of the Lagrangian and the Eulerian descriptions of
the flow, we may consider the rate of change of the volume integral of the
quantity Q in a material volume [V(t)] with surface [S(t)] having normal n
and velocity u, i.e.,
-Idtj
QdV.
(1.1.11)
V(t)
v
Contributions for this rate of change are given by the local rate of change of
Q' Iv(t) dQ/dtdV,as well as from the motion ofthe boundary / S(() Q(nn)dS
1.2. Dynamics of Vorticity
5
[note that for small times dt we may write dV = dS(u • n) dt] so that we have
A /
QdV = [
d£ Jv(t)
+ [ Q(u n)dS,
^dV
Jv(t) ot
(1.1.12)
JS(t)
By using vector calculus we may write
—
/
QdV = /
dt Jv(t)
—
dV
V-(Qxx)dV,
V(t) dt
vt
Jv(t)
(1.1.13)
JV(t)
or by using the expression for the substantial derivative we may write that
f
A f
/
[ ^-dV
^
QdV = [
&t JVV(t)
+ /
JV(t) Vt
JVV(t)
QVxxdV.
(1.1.14)
which is known as Reynold's transport theorem for the quantity Q.
1.2. Dynamics of Vorticity
The motion of an incompressible Newtonian fluid is governed by the following
equations that express the conservation of mass and momentum of fluid in
Eulerian and Lagrangian frames [160]. In the Eulerian description we consider
the development of the flow field as it is observed at a fixed point P of the
domain, while in the Lagrangian description we consider the equations from
the point of view of a material fluid element that moves with the local velocity
of the flow.
The conservation of mass can be expressed as
Eulerian Description:
—
dt
Rate of accumulation
of mass per unit
volume at P
V • (pu)
+
= 0.
(1.2.1)
Net flow rate of
mass out of P
per unit volume
Lagrangian Description:
Dp
Dt
Rate of change
of the density
of a fluid element
-P
Mass per
unit volume
Vu.
(1.2.2)
Particle-volume
expansion rate
The conservation of momentum can be expressed in terms of the velocity (u)
and the pressure P of theflowfieldas
6
L Definitions and Governing Equations
Eulerian Description:
+
pu-Vu
Rate of increase
of momentum
atP
=
-VP
+
(1.2.3)
Net viscous
force
Net pressure
force
Net flow rate of
momentum
carried in P by pu
/xAu,
where /x denotes the dynamic viscosity of the fluid, and v = ^/p denotes the
kinematic viscosity of the fluid with density p.
Lagrangian Description:
Du
(1-2.4)
-VP
Acceleration
of a fluid
particle
Net pressure
force
Net viscous
force
With definition of vorticity (1.0.1) the momentum equations for an incompressible, Newtonian fluid of uniform density can be expressed in Lagrangian
and Eulerian forms as
Eulerian Description:
3u;
Rate of increase
of vorticity
pu-Vo;
=
Net flow rate of
vorticity
pu; • Vu
+
Vortex
stretching
(1.2.5)
Viscous
diffusion
Lagrangian Description:
Du;
Rate of change
of particle
vorticity
pu; • Vu
Rate of
deforming
vortex lines
+
fiA • uj.
(1.2.6)
Net rate
of viscous
diffusion
Note that in the velocity-vorticity formulation the pressure of the flow can
be recovered from the equation
1
-AP = -V-
-|u|z - u x u ;
(1.2.7)
In the case of a viscous, Newtonian flow of a fluid with nonuniform density, rotation can be imparted to thefluidelements because of the baroclinic generation
1.3. Helmholtz's and Kelvin's Laws for Vorticity Dynamics
7
of vorticity. In this case the equation for the vorticity field is
^ A
= ( I w . V ) u + vAW + i v P x v l .
(1.2.8)
1.3. Helmholtz's and Kelvin's Laws for Vorticity Dynamics
In order to characterize the kinematic evolution of the vorticity field it is useful
to introduce some geometrical concepts. We consider the vector of the vorticity
field and we identify the lines that are tangential to this vector as vortex lines.
In turn, a collection of these lines can form vortex surfaces or vector tubes. The
motions of fluid elements carrying vorticity obey certain laws that were first
outlined by Helmholtz for the inviscid evolution of the vorticity and further
extended by Kelvin to include the effects of viscosity.
From the solenoidal condition for the vorticityfield,integrating over a volume
of fluid with nonzero vorticity, and using the Gauss theorem, we obtain that
/ V • u>dV = [ UJ - ndS = 0,
Jv
Js
(1.3.1)
where V denotes the volume of the fluid encompassed by the surface S. When
we consider a vortex tube, Eq. (1.3.1) dictates that the strength of the vortex
tube is the same at all cross sections. This is Helmholtz's first theorem. When
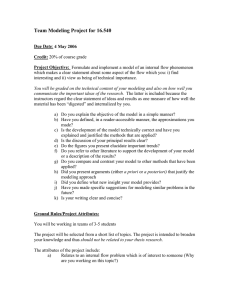
Eq. (1.3.1) is applied to a vorticity tube with cross sections A\ and A2 with
respective uniform normal vorticity components a>\ = u - n\ and 002 = w • n2
(Fig. 1.1) we obtain that
|o>i |Ai = IW2IA2 = |F|
(1.3.2)
independently of the behavior of the vorticity field between the two crosssections of the vortex tube. Equation (1.3.2) defines the circulation (F) of the
vortex tube.
When we consider the Lagrangian description of the inviscid evolution of
the vorticity field in an incompressible flow (with p = l)9 Eq. (1.2.6) can be
expressed as
—
= CJ-VU.
(1.3.3)
Dt
Comparing Eqs. (1.3.3) and (1.1.10) for the evolution of material lines,
—
= Jr-Vu,
Dt
(1.3.4)
1. Definitions and Governing Equations
Vortex Tube
•• Vortex lines
Figure 1.1. Sketch of vortex lines and vortex tube.
we observe that in a circulation-preserving motion the vortex lines are material
lines. This is Helmholtz's second theorem for the motion of vorticity elements.
As a result of this law, fluid elements that at any time belong to one vortex line,
however they may be translated, remain on the vortex line. A result of the first
and the second laws is the property of vortex lines and tubes: that no matter
how they evolve, they must always form closed curves or they must have their
ends in the bounding surface of the fluid.
Kelvin extended the laws of Helmholtz in order to account for the effects of
viscosity and at the same time provide a different physical interpretation for the
motion of vorticity-carrying fluid elements in terms of the circulation around a
closed curve. From the definition of circulation for a line around a cross section
of a vortex tube we obtain that
= [u-dr.
(1.3.5)
JL
Now by using the Lagrangian form of the velocity-pressure formulation for the
1.3. Helmholtz's and Kelvin's Laws for Vorticity Dynamics
acceleration of the material particles we obtain
Dr
D
J
As we are tracking material lines we obtain that
f Ddr
/
JL Dr
f
dn = / n du = 0.
JL
(1.3.8)
Using Eq. (1.3.8) and momentum equation (Eq. 1.2.4), we can express Eq. (1.3.7)
as
= - / VPdr
JL
+ v [ Au dr.
(1.3.10)
JL
Noting that the pressure term integrates to zero, we obtain that
DP
f
— = v (Au) • dr.
Dr
JL
(1.3.11)
In the case of an inviscid flow, the right-hand side of Eq. (1.3.11) is zero and
the circulation of material elements is conserved. This is Kelvin's theorem for
the modification of circulation of fluid elements.
In the case of baroclinic flow the circulation around a material line can be
modified because of the baroclinic generation of vorticity, and Kelvin's theorem
is modified as
Dr = v / (Au) • dr + / — Vp x VP • ndS.
Dr"
JL
J P2
(1.3.12)
Note that the second term on the right-hand side is an integral over the area
encompassed by the material curve. Equation (1.3.12) is known as Bjerken's
theorem.
Vortex Methods for Two-Dimensional Flows
The simulation of phenomena governed by the two-dimensional Euler equations are the first and simplest example in which vortex methods have been
successfully used. The reason can be found in Kelvin's theorem, which states
that the circulation in material - or Lagrangian - elements is conserved. Mathematically, this comes from the conservative form of the vorticity equation.
Following markers - or particles - where the local circulation is concentrated is
thus rather natural. At the same time, the nonlinear coupling in the equations
resulting from the velocity evaluation immediately poses the problem of the
mollification of the particles into blobs and of the overlapping of the blobs,
which soon was realized to be a central issue in vortex methods.
The two-dimensional case thus encompasses some of the most important
features of vortex methods. We first introduce in Section 2.1 the properties
of vortex methods by considering the classical problem of the evolution of a
vortex sheet. We present in particular the results obtained by Krasny in 1986
[129, 130] that demonstrated the capabilities of vortex methods and played an
important role in the modern developments of the method. We then give in
Sections 2.2 to 2.4 a more conventional exposition of vortex methods and
of the ingredients needed for their implementation: choice of cutoff functions, initialization procedures, and treatment of periodic boundary conditions.
Section 2.6 is devoted to the convergence analysis of the method and to a review
of its conservation properties.
2.1. An Introduction to Two-Dimensional Vortex Methods:
Vortex Sheet Computations
The origin of vortex methods may be traced back to the 1920s and 1930s
in the works of Prager (1928) [163] and Rosenhead (1931) [172, 173]. They
10
2.1. An Introduction to Two-Dimensional Vortex Methods
11
utilized vortex methods in two seemingly unrelated contexts that reveal the
multifaceted character of the method. In order to solve the problem of potential flow around bodies, Prager [163] considered the boundary of the body
as a surface of discontinuity, i.e., a vortex sheet. In order to satisfy the appropriate boundary equations, the problem is formulated as a boundary integral equation for the strength of the vortex sheet. The determination of the
vortex sheet strength provides a complete description of the potential flow
field. The surface-singularity method for the solution of the potential flows
has served as a predictive tool for the calculation of loads around aerodynamic configurations. The vortex sheet on the surface is consistent with the
limit of viscous flow at infinite Reynolds number, and it may be viewed as
the limit of a boundary layer of infinitesimal thickness. Note that for a nondeformable body the shape of the vortex sheet remains the same and it is
only its strength that is determined so that the appropriate boundary conditions are satisfied (this is discussed in more detail when we come to the
boundary-value problem in Chapters 4 and 6). One may wish to consider,
however, how the vorticity that exists on the surface of the body may enter
the fluid. It is evident that this is possible through the action of viscous or
other nonconservative forces. However, for the purposes of this chapter we
are not interested in invoking viscosity. The Kafeeloffel experiment of Klein
(1910) provides a mechanism by which the vorticity may enter the fluid in
an inviscid flow. As discussed by Saffman (1992) "the Kelvin and Helmholtz
theorems preclude the generation of piecewise continuous vorticity, but do not
prevent the formation of vortex sheets or the generation of circulation." According to Klein's experiment, a two-dimensional plate in an incompressible
ideal fluid is set in steady motion with velocity U normal to the plate. In order to enforce the no-through-flow boundary conditions, one may use then
the method of surface singularities, as mentioned above, and replace the surface of the plate by a vortex sheet, the strength of which can be determined
analytically.
Klein's experiment consists in removing the plate, either by pulling it abruptly
out of the fluid or by dissolving it instantaneously in the fluid. Hence the bound
vortex sheet enters the fluid because of this topological change. Because of the
absence of the confining body surface (and the respective boundary conditions),
the vortex sheet is then allowed to evolve, following an integral equation for
its motion. Rosenhead, in 1931 [172], was the first to consider the evolution
of a vortex sheet and to compute its evolution by discretizing it into elemental
vortices by using their locations as quadrature points. Performing his calculations by hand, he was not able to conduct simulations for extended times. At the
same time the use of a limited number of discretization elements prevented him
12
2. Vortex Methods for Two-Dimensional Flows
from facing further complications with the evolution of the vortex sheet, namely,
that the evolution of these discrete vortices does not necessarily represent the
evolution of a continuous vortex sheet.
This issue was addressed in a rigorous way by Krasny [129, 130], who elucidated at the same time some important mathematical and numerical analysis
points of the method. Krasny's calculations contain most of the features that
all rigorous vortex methods calculations wish to retain. As they are concerned
also with a fundamental problem in fluid mechanics, we wish to give a more
detailed presentation of these calculations.
Let us consider an initial vorticity field that is confined on a curve F o ,
parametrized by £ e [0, 1] - • 7 0 (£) with a normal n(§, t). We consider then
the (scalar) vorticity field defined as <wo(?) — ot(^)8[n(^, t)]. With this notation
we mean that, whenever one has to integrate COQ against a test function 0, one
considers this function on To and then integrates a 0 along this curve, or, in
short,
It is readily seen, by use of, for example, the formalism of weak solutions to
advection equations as developed in Appendix A, that the solution to the Euler
equations with this initial vorticity is a time-dependent vortex sheet supported
by a curve V(t) with density a. The curve T(t) is a material line that carries
constant circulation. In other words the vorticity satisfies for all positive time
<*>(-, 0 , 0 ) = / a(§)0[7(£, *)]<*£,
(2-1-1)
Jo
where 7(§, t) is a parameterization of T(t), thus satisfying
^ ( $ , 0 = u[7(£,0,fL
(2.1-2)
ot
The velocity u is coupled at all times in a self-consistent way with co through the
relations (V • u) = 0 and V x u = wor, equivalently, by the Poisson equation:
Au = - V x co.
The definition of the vorticity field co = a8[n(-,t)] and the relation V xu = co
clearly indicate that the velocity field induced by a vortex sheet has a component
parallel to the sheet that is discontinuous across the sheet. This confirms that
the vortex sheet can be viewed as the limit case of a thin layer with a rapid
transition between two velocity profiles.
2.1. An Introduction to Two-Dimensional Vortex Methods
13
Equations (2.1.1) and (2.1.2) are valid as long as their solution remains a
smooth curve. It is believed that a singularity in the curvature of the sheet
appears after a finite time, and if a solution persists afterwards, it is no longer
a vortex sheet solution in the sense of Eqs. (2.1.1) and (2.1.2).
One goal of numerical simulations is to try first to confirm this singularity
formation and then to describe what kind of solution might persist afterward.
To be more specific, let us assume that we are dealing with a problem that
is periodic in one direction, with unit period. In addition, we are looking for
velocities that have the following behavior at infinity:
lim
U(JCI , x2) -f u(x\, — x2) = 0,
where x\ is the direction of periodicity. The velocity of the sheet is determined
with the Green's function solution of the Poisson equation with periodic boundary conditions:
u = Kp*ft>
(2.1.3)
where * denotes convolution and the periodic vector-valued kernel K^ has the
form
p
1/
2 \cosh
'
sinh 2nx2
sin 2nx\
— cos 2TTXI ' cosh 2TTX2 — cos 2TTX\
2TTX2
To evaluate the integrals involved in the above convolution we refer to the
meaning of integrating the vorticity of the vortex sheet as discussed above. So,
with 7(§, t) = [*(£, t), y(£, t)], combining Eqs. (2.1.2) and (2.1.3) together
with definition (2.1.1) of the sheet yields the so-called Birkoff-Rott equations:
dx
1 rl
— =— / a
dt
2 Jo
dy
1 fl
— = a
dt
2 Jo
.
sinh27r[y-y(g,Q]
cosh 2n[y - y(£, 0] - cos 2n[x - JC(£, t)]
(2.1.4)
sin2n[x-x($,t)]
cosh 2n[y - y(£, *)] - cos 2n\x - *(§, 0]
(2.1.5)
where the integrals have to be understood in the sense of principal values. These
equations completely determine the solution as long as it remains a vortex sheet.
As we already mentioned, these solutions can develop singularities. This is a
result of the integrand singularity on the right-hand side of Eqs. (2.1.4) and
(2.1.5). The linear stability analysis of this system around the steady-state trivial
solution of a flat sheet with a = 1 shows that small perturbations of the form
14
2. Vortex Methods for Two-Dimensional Flows
exp(2/7r£§) are amplified with an exponential rate exp(27r/) with / = k/2.
This mechanism is known as the Kelvin-Helmholtz instability. Mathematically
speaking, this means that a linear combination of such modes will develop a
bounded solution, up to a finite time 7\ only if the coefficients of the modes
decrease exponentially, or, in other words, if the initial condition is analytic.
The width of the band of analyticity is linked to the exponential decay of the
Fourier modes, which is in turn related to the finite time of existence (we
refer to Ref. 129 and the references therein for more detailed mathematical
discussions).
In order to examine numerically this singularity formation and to investigate
whether a solution persists (in a weak sense) beyond this singularity, a natural
procedure is to
1. regularize the Birkhoff-Rott equations (2.1.4) and (2.1.5) by getting rid of
the singularity of the integrand,
2. replace the continuous sheet by a discrete set of points.
The effect of step 1 is to provide a smooth velocity field, leading to a wellposed problem for all times, the solution of which will be close to the analytical
solution as long as one exists.
The interpretation of step 2 is that continuous integrals are replaced by numerical quadratures. The accuracy of this procedure is conditioned by the smoothness of the integrand. This smoothness obviously deteriorates when the regularization parameter £ tends to 0, therefore making it necessary to increase the
number TV of computational points.
The convergence procedure of Krasny [129,130], inspired by an earlier work
of Anderson [4], is precisely to fix the regularization parameter and increase
N until convergence is obtained, then to decrease e and repeat the convergence
study with respect to N.
The specific type of regularization used in these calculations is not of central
importance. Krasny removed the singularity of the kernel by the simple addition
of a positive constant in the denominator (we will discuss later in Section 2.3
some general criteria to design efficient regularizations):
K£p(xux2)
1/
sinh 2nx2
sin 2TTXI
2
2 \cosh 271^2 ~ cos 2nx\ + s ' cosh 27TX2 — cos 2nx\ + e
As for the quadrature rule, the most efficient one is the midpoint rule, which is
spectrally accurate if the integrand is analytic (see Ref. 109 for a discussion of
this accuracy issue in the absence of regularization). For a given value of s and
N, one now has to solve the following system of ordinary differential equations
2.1. An Introduction to Two-Dimensional Vortex Methods
15
sinh 2n(yi cosh 2n{yi — yj) — cos 2n(xi — Xj) + s2'
(2.1.6)
(ODEs):
dt
2N ^
7=1
dyL
=
dt
±
2A/ —
J
sin
cosh 2n{yi — yj)
— cos 2JT(JC/ — jc^-) + e 2 '
(2.1.7)
We give in Figure 2.1 the converged (with respect to N) results obtained in
Ref. 129 for successive times. In these simulations, the initial condition was a
) .275
-0.275 -
0.0
1 .0
Figure 2.1. Sheet evolutions for e = 0.1 (the dotted spirals on the right-hand side
indicate the particle locations). (Courtesy of R. Krasny.)
16
2. Vortex Methods for Two-Dimensional Flows
0.15
(5 = 0 . 2 0
- 0 . 1 5 -
(5 = 0 . 1 5
(5 = 0 . 1 0
0 .0
1 .0
Figure 2.2. Vortex sheet at a given time for decreasing values of e. (Courtesy of R.
Krasny.)
sinusoidal perturbation of a flat sheet of the kind mentioned above, namely,
= § + 0 . 0 1 sin27r§, y(§, 0) = -0.01 sin
The maximum time of analyticity for this initial condition can be estimated on
the basis of linear stability analysis to be approximately 0.375. This value was
later verified by numerical experiments with e = 0 combined with filtering
techniques to control round-off errors [130].
Beyond this time one can observe the formation of a spiral; as seen in
Figure 2.2, decreasing the value of e (8 in Krasny's notations) allows to get
sharper details inside the core of this spiral. This is confirmed in Figure 2.3
2.1. An Introduction to Two-Dimensional Vortex Methods
17
(a)
(5
•
o
0.00.
0.07
(b)
°
"
o
-
-
"
/
/
Y
0.00
/
r 1\
\\
\
/
/
"
1
"
—
\
.
^
\
1
11
\i' \ u
^\
x
" —^y
/
/
/
-0.07
0.4
^—
-
^
0.5
\
\
t \
! !
//
/
//
/
^
0.6
X
Figure 2.3. Convergence study for the spiral intersections with the x\ axis. (Courtesy of
R. Krasny.)
where are plotted, for decreasing values of 8, the x\ coordinates of the successive intersection of the sheet with the first axis. One notes that reducing
the value of s only introduces further roll-up inside the spirals without changing significantly the position of the existing turns (some recent calculations
by Krasny with even smaller values of s seem, however, to indicate that the
limiting process might be less straightforward).
The first important conclusion of these calculations is that there is no dissipative time scale associated with the parameter s. This parameter gives only the
scale under which the solution is not described. We can already state that the
reason for this absence of numerical dissipation is that the discrete dynamical
18
2. Vortex Methods for Two-Dimensional Flows
system of equations (2.1.6) and (2.1.7) underlying the numerical method is
Hamiltonian. If we denote by E the quantity
E[(xi9 yt)i] = — J^log [cosh 2n(y{ - yj) - cos 2n(xi - xj) + s\
then it is readily seen that the system of equations (2.1.6) and (2.1.7) can be
rewritten under the Hamiltonian form
d_xL=d_E_
dt
dyt'
dyL
dt
=
_dE.
dxt'
i e [ l N ]
We will emphasize this fact in Section 2.6 and show that this Hamiltonian form
yields the conservation of kinetic energy by vortex methods.
Another important feature of the numerical method just described is that it
takes full advantage of the fact that the vorticity remains on a small support, here
a one-dimensional curve; moreover, the far field is explicitly taken into account
in velocity formula (2.1.3). This explains the early attempts of Rosenhead to
simulate the vortex sheet evolution with a vortex method. Moreover, refinement
techniques can easily take advantage of the geometry of the problem by inserting
points in the curve in between neighboring particles whenever they go too far
apart (as a matter of fact, as it is done in Krasny's calculations).
These two features - lack of numerical dissipation and localization of the
method - should be compared with what would happen if a more conventional,
say finite-difference, method was used. In this case it would not be possible to
deal anymore with a one-dimensional problem and a more subtle refinement
strategy would have to be used to capture accurately the vortex sheet without
wasting too many points. The far-field boundary conditions would have to be
modeled by an artificial boundary condition; finally it would not be straightforward to avoid creating numerical diffusion and preserve stability (e.g., for
finite differences, up winding is often introduced to stabilize the methods, with
the potential pitfall of numerical dissipation).
The spirit of the vortex methods discussed in this book will always try to retain
as much as possible the basic features of Krasny's vortex sheet calculations,
while introducing additional phenomena such as diffusion effects, the vortex
stretching in three-dimensional flows, and boundary conditions.
2.2. General Definition
We now turn to a more clear-cut description of vortex methods for inviscid
two-dimensional unbounded flows (Section 2.5 and, more generally, Chapter 4
will be devoted to boundary conditions).
2.2. General Definition
19
Let us first recall the vorticity-velocity formulation of the Euler equations
on which these methods are based:
dco
— +div(ua>) = 0,
ot
(2.2.1)
co(.,0) = COQ,
(2.2.2)
divu = 0,
(2.2.3)
curlu = co,
(2.2.4)
|u| ^
Uoo .
(2.2.5)
One interesting feature of the velocity-vorticity formulation is the fact that
the pressure and the associated divergence-free constraint on the velocity have
disappeared.
A classical way to relate the velocity and the vorticity [Eqs. (2.2.3)-(2.2.5)]
is through an integral representation. If we denote by G the Green's function for
the Laplacian operator in two dimensions and by K its rotational counterpart,
then, if x = (x\, X2), we have:
G(x) = -i-log(|x|); K(x) =
lit
and the Biot-Savart law reads
u = Uoo + K*a;.
(2.2.6)
As already noted for the vortex sheet calculations, this formula accounts explicitly for the far-field boundary condition.
From now on we are going to focus on the forms of Eqs. (2.2.1), (2.2.2),
and (2.2.6) of the Euler equations. Vortex methods are based on the Lagrangian
formulation of these equations, in particular on Kelvin's theorem (see Section 1.3), which asserts the conservation of circulation along material elements
moving with the fluid:
, ,
co(-,t)dx = 0.
(2.2.7)
at JV(t)
The basic idea in vortex methods is then to sample the computational domain
into cells in which the initial circulation is concentrated on a single point - or
particle. The resulting approximation can be written as
COQ
— COQ
=
20
2. Vortex Methods for Two-Dimensional Flows
where the value of ap is an estimate of the initial circulation around the
particle xp.
Assume next that a smooth approximation u^ of u is given, and denote by
xhp the trajectories of the particles along the flow uh. In view of Eq. (2.2.7), it is
natural to require that ap remains for all time the local circulation around xhp.
Thus an approximation of the vorticity at time t is given by
coh(x, t) = Y <*pS [x - x£(0l •
(2.2.8)
The precise mathematical justification of this approximation is given in Appendix A, based on the principle of weak solutions to advection equations.
The numerical approximation is therefore completely defined once the coupling between coh and u^ is restored through some approximation of the BiotSavart law. Because of the singularity of the kernel K, implementing directly
Eq. (2.2.6) with the vorticity field coh can lead to very large values when two
particles approach each other.
Although it is possible to show that, under some assumptions, in particular
on the regularity of the underlying flow, this cannot happen (see Section 2.6
below), the usual strategy to overcome this difficulty is to remove the singularity
of K. The simplest way to do it is to add some small positive constant to prevent
the denominator of K from vanishing-as was done in Krasny's calculations.
A more general approach, which allows a precise control of the accuracy of the
procedure, is to replace K by a mollification K£ obtained in the following way:
first a smooth cutoff function £ is chosen that satisfies / t;(x)dx = 1. If s is a
small parameter, one denotes by fe the function defined by
Finally one sets
and the numerical particles xhp(t) are computed by numerically integrating the
system of ODEs,
dxh
-^=uh(xhp,t);
x£(0)=x,
(2.2.9)
with
uh =KB*coh.
(2.2.10)
2.2. General Definition
21
The complete numerical method is then defined by Eqs. (2.2.9) and (2.2.10). In
practice it amounts to the resolution of a (often large) set of coupled differential
equations.
Note that one can view the mollified velocity field of Eq. (2.2.10) as the exact
velocity associated with a vorticity coh£ consisting of mollified particles:
coh£(x) = J2<xPSe(x-xhp).
(2.2.11)
These mollified particles are called vortex blobs, with core size s. So far, we
have implicitly assumed that this core size has a constant value. It may be
natural to allow this value to vary in space and time, depending on the scales
sought to be resolved in different zones of the flow. A variable-blob method
would consist of defining a function s (x) <^ 1 and modifying Eq. (2.2.11) into
h - xhp),
coh£(x) = [>
][>pk(x,)(x
p)
(2.2.12)
p
which gives the velocity formula
u\x) = ^T^K^x-x^).
(2.2.13)
p
The efficiency of vortex methods is conditioned in particular by
• the choice of the cutoff function f,
• the way locations and circulations of particles are initially set.
These two issues will be respectively addressed in Sections 2.3 and 2.4.
The numerical time-advancing scheme required for solving Eq. (2.2.9) is an
additional important factor. The numerical solution of systems of ODEs is a
well-covered subject and we will not address it further in this book. In practice
it is important to use schemes that are at least second order (Adams-Bashforth
or Runge-Kutta schemes are commonly used).
A striking difference between vortex methods and grid-based methods such
as spectral, finite difference, or finite element lies in the treatment of the vorticity transport equation. The philosophy of grid-based methods is more or
less to project this equation on a finite dimensional functional space - typically
functions that are locally (in the case of finite element) or globally (for spectral methods) polynomials of a given degree. In vortex methods the transport
equation is dealt with exactly, and the approximation amounts to only replacing
the initial vorticity by a set of particles and smoothing the velocity field that
carries these particles. The fact that the smoothing does not appear directly in
22
2. Vortex Methods for Two-Dimensional Flows
the vorticity transport equation is the reason that vortex methods do not face the
usual dilemma of grid-based methods between accuracy and stability. On the
other hand, the fact that the vorticity field is sampled on a moving grid makes
vortex methods sensitive to the smoothness of the velocity field. This important
issue will be addressed in Chapter 7.
In closing this section let us mention that, besides the initial vorticity field,
vortex methods also allow us to handle source terms - besides linear zero-order
or second-order terms which will be discussed in subsequent chapters. Assume
one has to solve the system of equations (2.2.1)-(2.2.5) with a source term S
on the right-hand side. The vortex approximation of this system will consist of
updating the circulation of particles xp(t) by the amount of local circulation
produced by S. This circulation can be obtained by multiplying the value of S at
the particle locations x^ with the volume of the Lagrangian computational cell
around xp. In the case of an incompressibleflowthis volume remains constant in
time, and its value vp depends on how particles were initialized. The circulation
is finally updated by
2.3. Cutoff Examples and Construction of Mollified Kernels
The desirable features sought for cutoff functions are smoothness and accuracy.
Accuracy in particular means that one wishes to avoid, in the Biot-Savart law,
the production of too much smearing in the particle trajectories by the mollified
kernel.
As we will see in Section 2.6 the moment properties of the cutoff are a
convenient way to measure its accuracy. We say that a cutoff is of order r if the
following assumptions hold:
) dx = 1,
h
^(x)dx
= 0 if|i|<r-l,
(2.3.1)
The meaning of the above conditions is that the cutoff £ has, up to the power r—1,
the same moment properties as the Dirac measure. In other words, the vortex
blobs in formula (2.2.11) and the vorticity particles share the same momentum, starting with total circulation, linear impulse, and so on, up to order r — 1
2.3. Cutoff Examples and Construction of Mollified Kernels
23
[if i = Oi, i2) is a multi-index, |i| = i{ + i2 and x* = JCJ'JC^2]. Notice that, for
symmetry reasons, an even positive cutoff function can always be scaled in order to be at least of second order. Conversely, higher order requires giving up the
positivity of the cutoff, which means that positive circulations may locally produce negative values in the mollified vorticity field (as, most often in numerical
methods, positivity and high-order accuracy have difficulty in coexisting).
The simplest examples of cutoff functions are provided by the one-dimensional characteristic top-hat function x in the interval [-1/2, 1 /2]. In dimension
d one can choose either
f = X 0 X • • • ®X
or
where Sd denotes the volume of the unit sphere in Kd. If one wishes smoother
functions, the simplest is to take successive convolutions of x by itself, which
has also the effect of increasing the size of the support of £ and thus of the
blobs. For example x * X *s the classical triangle-hat function with support in
[—1, 1], while X * X * X i s piecewise quadratic with support in [—3/2, 3/2].
Of course all these functions are positive and therefore cannot be of order
more than 2. For higher-order cutoff functions, one in general favors functions
without a compact support.
Let us first give an example, borrowed from Ref. 25, showing that it is
possible to construct C°° cutoff functions at any order. These cutoff functions
are obtained from the so-called generalized Gaussian functions, defined by
where / > 1, T~x denotes the inverse Fourier transform, and c\ are normalization coefficients that ensure that the integrals of these functions are unity. If
/ = 1, one recovers the usual Gaussian function. It is a simple matter to check
that F/ is infinitely differentiable. It is of order r = 21. This is because, if ex is
a multi-index, x a F/ is, up to a multiplication by a constant, the inverse Fourier
transform of da exp(—1£| 2/)- But these derivatives can be written as the product
of exp(-|£| 2 / ) by a polynomial in £ containing no power below 2/ — |a|. Thus
2l-\cx\<\(3\
24
2. Vortex Methods for Two-Dimensional Flows
so that
and its integral over R^ vanishes.
Although interesting from a theoretical point of view, these cutoffs are of
little practical interest, unless one wishes to perform computations of velocities
in the Fourier space. A more efficient way to obtain cutoff functions of order
greater than 2 is to choose a positive cutoff function f with spherical symmetry
(that is, one that depends on only the radius), decaying fast enough at infinity
and to combine properly different scales in the same cutoff.
More precisely, let £ be any radially symmetric function with J |x| 4£(x) <
oo and a ^ 0, 1; to obtain a fourth-order cutoff, it suffices to find two coefficients X and [i such that, if we set f (x) = A£(x) +
0.
(2.3.2)
Indeed for symmetry reasons we have for all coefficients A and \x
[xix2j;(x)dx = 0, I \x2\2l(x)dx= f
so that conditions (2.3.2) are enough to provide a fourth-order cutoff function. If
we denote by So and S2, respectively, the integrals of £ and | x | 2 £, straightforward
calculations show that these conditions are satisfied if
(A + a2fi)S0 = 1,
(A + a*fjL)S2 = 0,
that is,
S0Ja*-a2'
\S0
S2Ja2-l'
Another strategy to construct fourth-order cutoff functions is to combine £ and
its radial derivative (provided this latter decays fast enough at infinity) with the
proper coefficient, which can be computed through calculations similar to those
given above.
If even higher accuracy is desired, one can combine three different scales to
obtain cutoff of order 6, and so on. This method is used in Ref. 26 to obtain
high-order cutoff functions starting from the Gaussian. It is also possible to
combine Gaussian with polynomials of degree r — 2 to obtain a cutoff function
of order r.
2.3. Cutoff Examples and Construction of Mollified Kernels
25
Besides smoothness and order of accuracy, computational cost is also a criterion for choosing a cutoff. Gaussian-based cutoffs are often favored because
of their smoothness and fast decay, but they are expensive to compute, and it
is advisable to tabulate their values in actual computations. Algebraic cutoff
functions avoid this additional task.
Once the choice of a cutoff is made, it remains to compute the associated
kernel K£. To avoid the explicit computations of the convolution it is customary
to use a radially symmetric cutoff together with the definition of A in spherical
coordinates. In two dimensions, given a cutoff such that £(x) = f (|x|), the
calculations are as follows. The kernel G£ (G£ = G • J £) satisfies G£(x) —
G£(\x\) where,
18 ( 8Ge
This yields
Cr
1
f)C
—— = -s
3r
r Jo
To get K£ it suffices to write
1
fr
1
dG£
Ke(x) = -(x2, -x\)——
= -r-(x
,
*
i
)
/
-s
2
r
Br
rz
Jo
In many cases (as for Gaussian-based or algebraic cutoffs) this leads to explicit
algebraic forms of the kernel. For example, in the case of a Gaussian function
l(r) = n~x exp(—r 2) one obtains
K,(x) = ^ ( - x
z
2nr
2
, *i)[l - exp(-r V 2 ) ] .
(2.3.3)
Starting from a fourth-order Gaussian-based kernel constructed as indicated
above, with a = 2, one obtains the formula [26]
K(4)(x) =
(
~*^X2l\\
- exp(-r 2 /2e 2 )][l + 2exp(-r 2 /2e 2 )].
(2.3.4)
These examples clearly show that Ke is a mollification of K that acts in only
an s neighborhood of the singularity. This is actually a general property: if l£
decays like |x|~ M at infinity, we can write
dG
dr
1 f f°°
r [Jo
-
f°°
Jr
-
1
\
2. Vortex Methods for Two-Dimensional Flows
26
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Figure 2.4. Modulus versus r for the exact kernel K (solid curve) and its mollifications
of Eqs. (2.3.3) (dotted curve) and (2.3.4) (dotted-dashed curve) for s = 0.1.
which shows that Ke = Kg£ with |1 - g£(x)\ < C(X/E)2~M. In the particular
case of a cutoff function with compact support of size R, it is also readily seen
that Ke(x) = K(x) if |x| > Rs. Figure 2.4 shows the profiles of the mollified
kernels given by formulas (2.3.3) and (2.3.4) for s = 0.1. One can see that
the choice of high-order cutoff essentially translates into sharper short-range
particle interactions. Table 2.1 indicates some additional cutoff shapes with
their order and the formulas of the associated kernels. Note that the first cutoff,
introduced by Chorin [49], is not bounded, but does give a continuous kernel.
Note also that the algebraic fourth-order cutoff given in the Table 2.1 is not
strictly speaking fourth-order, as the fourth-order moment is not finite.
2.4. Particle Initializations
We describe here several ways to initialize particles in order to approximate the
exact initial vorticity field as accurately as possible.
A natural choice is to draw cells of uniform size h inside the support of COQ and
to initialize a particle at the center of each of these cells. The circulation assigned
2.4. Particle Initializations
27
Table 2.1. Examples of cutoff functions and mollified kernels
Order
{t ',»!
r
r >s
-
e
2
(-y,x) r4+3(£r)2+4£4
2n
(£ 2 +r 2 ) 3
2 2-r2
IT (1+r 2 ) 4
2JT
/ ^T
\ ^f^
2^
( > y)
~r 2"
2 2
[l + (r /s
4
— 1) exp ( ^r)]
£l
]
4
6
to this point is the local value of the vorticity multiplied by the volume hd of the
cell, where d = 2, 3 is the dimension. If this quantity is available, one can also
directly assign the integral of the vorticity on the cell. A third possibility consists
of choosing the particle circulations such that the mollified vorticity, as given
by formula (2.2.11), takes the prescribed values at the particle locations; this
variant will be discussed in more detail in the context of circulation processing
schemes in Chapter 7.
The accuracy of these initializations relies very much on the order of quadrature formulas in which particle locations are used as quadrature points (see
Section A.I). The first choice is related to the midpoint rule. For periodic or
unbounded geometries, it is thus infinite-order accurate in the sense that the
distance in some appropriate distribution space between the exact vorticity and
its particle approximation can be bounded by Chm for all m, provided the vorticity has derivatives of an order up to m bounded. For rectangular domains
without periodicity assumptions, the midpoint rule is only second order, but
higher-order initializations can be obtained if initial particle locations coincide
with quadrature points associated with Gauss-type quadrature formulas. Obviously what we just said applies as well to all geometries that can be smoothly
mapped into rectangles; in this case the actual particles will of course have to
be images by the inverse mapping of points on a uniform (or Gauss-type) grid.
A second class of initializations is based on random choices. Thefirstmethod
consists of initializing particles randomly in the support of the vorticity and assigning them the local value of the vorticity multiplied by the average volume
around the particle. We evaluate this volume by dividing the size of the support
of the vorticity by the number of particles. The convergence of this initialization
relies on the laws of large-numbers (see Lemma A. 1.3 in Appendix A). The rate
of convergence, defined in a statistical sense, is governed by l/>//V, where N is
the number of particles. Since in two dimensions N is of the order ofh~2, where
h is the average spacing of the particles, this convergence rate compares poorly
28
2. Vortex Methods for Two-Dimensional Flows
against the deterministic choice. The random choice, however, can prove to be
useful in case there is no guarantee of any kind concerning the smoothness of
the vorticity.
It is finally possible to combine deterministic and random choices. One first
splits the vorticity support in cells of size h, then chooses randomly one particle
inside each cell. In two dimensions, it is possible to prove (see Lemma A. 1.4)
that, still in a statistical sense, one gets second order just as for the midpoint
formula in rectangular domains. However, this applies to C 1 functions, instead
of C2 for the midpoint formula. For vortex methods, it turns out that somehow
this kind of smoothness can be considered as free, because of the regularization
effect of the velocity computation (this argument is more developed in the
convergence proof of Section 2.6 below). The quadrature estimate related to
this latter kind of initialization, which we will call quasi-random, can thus be
seen as optimal.
To evaluate the relative performance of deterministic and random choices let
us now give two simple numerical experiments. In the first one we have chosen
an initial vorticity field with radial symmetry, leading therefore to a stationary
solution of the Euler equations in the plane. It is given by
ft>o(x) = (1 - |x| 2 ) 3
if |x| < 1 ,
<yo(x) = 0 if |x| > 1.
Examples of this type have become classical tests of the accuracy of vortex
methods. Particle trajectories would be circles if the motion equations were
solved exactly. However, because of the gradient of the vorticity, the various
circles move with different velocities, yielding after some time strong distortions in the particle distribution. One can observe in Figure 2.5 that if particles
are initialized in a completely deterministic way, the computation of the velocity
at the early stages is rather accurate, because this choice takes advantage of all
the regularity of the initial vorticity. However, for longer times, as strong shears
develop in the particle distribution, the accuracy deteriorates, then remains more
or less steady. If one uses the mixed random-deterministic method, it appears
clearly that the error is bigger initially but remains rather stable, so that its accuracy turns out to be comparable with the completely deterministic case. As for
the completely random choice, the accuracy is also stable, but lower than in the
two other choices. All calculations are based on a mesh size h = 0.1, resulting
in ~300 particles in support of the vorticity, a fourth-order cutoff function with
s = 2h, and a fourth-order Runge-Kutta time-stepping scheme with a time
step At = 1. An explanation of these results is that, although the vorticity is
smooth, the flow map giving the particle locations develops large derivatives
that deteriorate the quadrature estimates as time goes on. This will be further
2.4. Particle Initializations
29
1OU
Figure 2.5. Error curves for the evolution of a circular patch with deterministic (solid),
quasi-random (dashed), and random (circles) initializations.
illustrated by our numerical analysis in Section 2.6, and accuracy issues related
to particle distortions will be discussed in more detail in Chapter 7. The saturation in the deterioration of the accuracy observed for the deterministic initialization can be explained by a transition between a high-order quadrature formula
requiring smoothness and a low-order one that is valid for nonsmooth data.
A visual explanation of the good performance of random choices can be
given by consideration of the evolution of a non-uniform elliptical vortex. This
type of initial condition produces even stronger shears than the radial vortex
just considered, resulting in the ejection of thin filaments that are difficult to
capture. Besides its own interest, this test is enlightening as it produces features
that are generic to many flows of interest (shear layers, boundary layers, etc.).
Figure 2.6(a) shows that a uniform initialization results in a layered distribution
of the particles, with large holes that indicate that the flow is not correctly
resolved everywhere. On the contrary, the quasi-random and random choices
[Figures 2.6(b) and 2.6(c), respectively] maintain a homogeneous distribution
of points for a longer time. We will also come back to this test in Chapter 7.
30
2. Vortex Methods for Two-Dimensional Flows
.*.'•••-•. y
(a)
(b)
Figure 2.6. Locations of particles initialized on an elliptical vorticity profile with (a) a
deterministic, (b) a quasi-random, or (c) completely random formula.
2.5. The Case of No-Through-Flow or Periodic Boundary Conditions 31
(c)
Figure 2.6. (Continued)
2.5. The Case of No-Through-Flow or Periodic Boundary Conditions
We have so far considered the case of flows evolving in free space. For other
boundary conditions, one must modify the Biot-Savart law to take into account the desired boundary condition. The case of computational domains with
solid walls will be the topic of Chapter 4. Our goal here is to outline only the
modifications that must be done in the definitions of vortex methods in two
simple cases, which will be analyzed in Section 2.6: the case of a bounded flow
in a simply connected domain and the case of flows in periodic boxes.
In the first case, we assume that the normal component of the velocity is
zero, the so-called no-through-flow boundary condition. In terms of the stream
function \j/ such that u = V x f, this means that the tangential derivative of \jr
vanishes at the boundary. Since the boundary has a single connected component,
\j/ is a constant, which can be set to zero as ty is obviously determined up to an
additive constant, at the boundary. The relationship co = V x u is equivalent to
— A\j/ = co and we are finally led to the system
-Ai/=co
in
\fr = 0 on dQ.
ft,
(2.5.1)
(2.5.2)
This system can be given an integral solution that, incorporates, in addition to
32
2. Vortex Methods for Two-Dimensional Flows
the vorticity, a boundary term. The procedures to determine this boundary term
properly will be described in Chapter 4.
Replacing co in the above system with the vortex blobs means that the blobs
at a distance less than e from the boundary will be chopped there. One may
of course wonder about the effect of this truncation on the overall accuracy of
the method. It turns out that, if the initial vorticity vanishes sufficiently fast at
the boundary, this effect is negligible. This is clearly seen if one considers the
particular case in which co0 has a compact support inside the domain. In this
case the support of the vorticity remains well inside the computational domain
for all finite time, and it suffices to choose s small enough to make sure that
blobs that might intersect the boundary actually carry no vorticity at all, so that
the chopping step does not affect the computation of the vorticity. In the general
case coo G W™'°°(£2) (that is, when the vorticity and its derivatives vanish at the
boundary) it indeed results from the analysis in Section 2.6 below.
Let us now turn to the case of periodic boundary conditions. If one has to solve
the Euler equation in a square Q of size L with periodic boundary conditions, the
definitions given in Section 2.2 apply with the minor modification of replacing
the kernel K with its periodic version Ki:
K L (x) =
keZ 2
Actually the infinite sum
u(x)= /
JQ
KL(x-y)co(y)dy
isfiniteas soon as co has zero mean. This condition is clearly necessarily satisfied
by a periodic vorticity field, as shown by a straightforward integration by parts
of co = curl u in £2. To check that it is sufficient to guarantee the finiteness of
the sum, we first observe that we can rewrite u as
u(x) = / [KL(x - y) - K(x)My) dy.
Jn
If we now consider the first component of the velocity, we note that combining
the terms corresponding to values of k of the form (k\, £2) and (k\, —ki) leads
us to consider the series
2.5. The Case of No-Through-Flow or Periodic Boundary Conditions 33
This series is clearly bounded by
lyl
(2-5.3)
|x-kL| 3 '
which converges uniformly for y e £2.
The definition of vortex methods for periodic boundary conditions differs
from the free-space methods only by the computation of the velocity, which is
based on periodic kernels that are mollified versions of K^.
In practice it means that one has to initialize particles xp, \p\ < N, in Q and,
whenever the computation of the velocity is needed, to consider image particles
{xJ + k L , k e Z 2 } . The velocity at a particle xhp is then given by
k e Z 2 \q\<N
If a particle happens to leave the computational box, it has to be replaced with
its image that enters the box on the opposite side. Of course, the zero-mean
condition on the vorticity needed for the velocity to be finite in the continuous
case must be translated here into the the discrete condition YjPap = 0- Also, the
symmetry property of K needed to prove the finiteness of KL must be satisfied
by the mollification K e . This requires that the cutoff function f be even, which
in practice is always the case.
Finally, one must note that the sum on the right-hand side of expression
(2.5.4) can be truncated. Given an error tolerance of 8, since the remainder of
series (2.5.3) decays like l/|k|L, one can drop the image particles in boxes of
indices k such that |kL| > S~l.
The case that was considered at the beginning of this chapter, that of a domain
extending to infinity in one direction and periodic in the other direction, can be
recovered as well. It is indeed simpler, because in this case the periodic kernel
can be given in a closed form. In complex notations z = x\ + 1x2 one can write
K(xux2) =
linz
To derive a kernel that is periodic in the x\ direction, we add the contributions
of image boxes in this direction, and we obtain
^
k=\ "
z
k=l
z+k
l
34
2. Vortex Methods for Two-Dimensional Flows
A little algebra to develop cot(7rz) back into real coordinates allows us to end
up precisely with the formulas used in Section 2.1.
2.6. Convergence and Conservation Properties
It is on purpose that we have put together the analysis of conservation and
convergence features of vortex methods. While convergence analysis is the
classical way to assess the validity of a numerical method, it does not tell
everything about it, in particular because convergence results are true in only
the asymptotic sense, that is, in the limit of small numerical parameters, while
simulations often cannot afford high resolution. From the fluid mechanics point
of view, a high-order numerical method that, for example, would not conserve
the total circulation might be useless at low resolution.
The most striking feature of vortex methods, which has triggered interest
among fluid dynamicists, is its built in conservation of many inviscid flow
invariants. In some sense the conservation properties of vortex methods are a
guarantee that, even if used in underresolved simulations, they give a correct
qualitative answer. On the other hand, conventional numerical analysis, together
with the extension of vortex methods to more general than simple inviscid twodimensional flows, has given them the status of plain numerical methods, rather
than merely fluid models, and allowed us to understand and quantify the role
of the numerical parameters that govern the method.
This section is organized as follows: We first give a general convergence
result based on the mathematical framework described in Appendix A. We then
review other convergence results that correspond to limit cases of the general
theory. Note that here we are concerned essentially with the theoretical aspects
of the convergence of vortex methods. Numerical illustrations will be given in
Chapter 7. We finally derive the conservation properties of vortex methods.
2.6.1. A General Convergence Result
The first complete convergence analysis of vortex method was given by Hald
in 1979. This analysis [98] in particular showed for the first time the relative
roles of the numerical parameters involved in the method, namely the particle
spacing and the cutoff width. This convergence result was restricted, however, to
rather severe overlapping conditions and cutoff assumptions. It was generalized
in 1982 independently by Beale and Majda [25] and Cottet [58]. Beale and
Majda included in their analysis [25] a three-dimensional scheme that will be
discussed in Chapter 3, while Cottet [58] focused on a minimal smoothness
2.6. Convergence and Conservation Properties
35
requirement for the cutoff function and on a simplified consistency analysis
relying on quadrature estimates. Anderson and Greengard included in 1985
the time discretization in their analysis [8] and described a totally grid-free
three-dimensional scheme, which was later analyzed by Beale [19].
In all these references the analyses were based on estimations of how close
numerical particles could remain from exact tracers of the flow, making heavy
use of the exact and approximated flow maps. We follow here an alternative approach suggested in Ref. 60 and further developed in Refs. 44,45. This analysis
is based on the notion of weak solutions to advection equations, developed in
Appendix A and does not explicitly involve the particle trajectories. The reason
why we choose this point of view is that it easily extends to three-dimensional
schemes, including filament methods, as well as vortex-in-cell schemes in which
the particle velocity is based on a grid solver rather than on the Biot-Savart
law. Another nice feature is that, while traditional analysis was always based
on the assumption of a very smooth underlying flow, this approach allows us to
account optimally for a given smoothness of the flow. More precisely, it shows
that vortex methods enjoy the best rate of convergence one might expect: if the
derivatives of order up to r — 1 of the vorticity are bounded and if one uses a
cutoff of order r, the discrepancy between computed and exact velocity decays
like £ r , very much as for a grid-based method of the same order.
For simplicity our convergence result will be stated in the case of periodic
boundary conditions. However, it will be clear from its proof that it applies as
well to bounded domains with no-through-flow boundary conditions, provided
the initial vorticity vanishes at the boundary and the calculation of the velocity
from the vorticity incorporates the constraint of zero normal velocity at the
boundary. We will also indicate how its proof has to be modified to address the
free-space problem.
Finally we will restrict ourselves to the case of C°°cutoff functions. We have
actually shown in Section 2.3 that in practice this kind of cutoff is natural and
easy to implement, so there is no reason to focus on less regular cases.
The numerical error in vortex methods comes basically from two sources:
the regularization needed in the computation of the velocity and the particle approximation. It is easy to control the first one in terms of the cutoff
order and of the smoothness of the flow. To show that the second one is
negligible compared with the regularization error, we will need to construct
the particle approximation from a regularized initial vorticity field instead
of the original one. This will introduce an additional regularization error, but
of the same order as the one involved in the reconstruction of the velocity
and will allow us to use high-order quadrature estimates to control the particle
36
2. Vortex Methods for Two-Dimensional Flows
approximation. Moreover, the analysis will show that there is no added price,
in terms of the error estimate, to pay for this regularization. We will comment
further at the end of this section on some practical aspects of this initialization
technique.
Let us now come to the precise definition of the method we plan to analyze.
From now on, we make constant use of the notations and results given in
Appendix A. Let Q =]0, 1[2, r > 1, and let coo be a periodic function in Q.
Let f be a C°° cutoff function of order r. We define the periodic convolution of
a periodic function (or distribution) / defined on Q with a function g defined
in R2 by g *p f = g * / , where / denotes the periodic extension of / in R 2.
Then, if £ is a cutoff function, we set
f£(x) = e~ 2 £(x/£),
a)e0 = ££ *, o)0, K£ = K * &.
We now initialize particles x^ on a uniform mesh of size h in the box Q and we
set
ap = h2co£0(xp), co^(x) = ^2ap8(x
- xp)
(this is the deterministic initialization described in Section 2.4; for random
initializations, as far as we know, the convergence of the genuine vortex methods
is an open problem, even in the smooth case; however, see Subsection 2.6.2
below for some indications of the convergence of a modified vortex scheme
with random choice).
The numerical method is then defined, as explained in Section 2.2 through
Eq. (2.2.9), for the motion of the particles, with a velocity field defined by
h
=Ke*e*pco
p .
Theorem 2.6.1. Let r > 2 and T > 0. Assume that a)0 e Wr~Uoo(Q) and that
£ is a cutoff function of the order of r, in the sense of Eqs. (2.3.1). Assume
further that there exists s > 0 such that h < £ 1+5 ; then for h small enough the
following estimate holds for t e [0, T].
\\(u-uh)(.,t)\\LP(Q)<C(T)er.
The condition linking the parameters h and s means that the blobs around the
particles must overlap, with, at least in principle, an increase in overlapping as
s tends to 0. We will see below that actually this condition can be relaxed to
some extent and that the vortex method without smoothing can be proved to be
convergent.
2.6. Convergence and Conservation Properties
37
In our proof we wish to clearly distinguish between the regularization and
the particle discretization error. To this end, we introduce the auxiliary problem
dco£
ot
+div(uW) = 0,
u£ = K£*po)£,
<*/(-, 0) = coeQ.
(2.6.1)
(2.6.2)
(2.6.3)
We first prove Lemma 2.6.2.
Lemma 2,6,2. Under the assumptions of Theorem 2.6.1 we have for t e [0, T]
(2.6.4)
(2.6.5)
Proof. Concerning relation (2.6.4), note that, for s = 0, this is the classical
regularity result for the Euler equation that merely results from the combination
of the advection of the vorticity equation and the regularizing property of the
convolution by K (see Section A.3). For s ^ 0, it thus suffices to observe that
K£ has the same smoothing property as K, uniformly with respect to e, and that
To prove relation (2.6.5) let us first focus on the initialization error. We claim
that for all finite p
\\co0-co£0\\_lp<Csr.
(2.6.6)
Using the definition of &>Q and the fact that f has integral 1, we get
co0(x) - <ug(x) = 5 3 / [a>o(x) - «o(y)]^(y - x + kL) dy.
keZ2 Jn
(2.6.7)
We now develop &>o(x) — <wo(y) by the Taylor formula with the integral remainder to get, after cancellations due to moment properties (2.3.1) of f,
coo(x) - WQ(X)
= YJ I f{(yk s Z 2 Jo
ksZ2
Jn
where we have used the notation [xV/] m =
38
2. Vortex Methods for Two-Dimensional Flows
If we now insert this expansion into Eq. (2.6.7) and integrate it against a test
function 0, we obtain
co£0(x)](p(x)dx
[(Wo(x) -
v^ f f fl
= y ^ /
k
/
/ [zVc^o(x + ^z)] (j){x)^e{zJr\iL)dxdzdt.
JQ JQ JO
(2.6.8)
We then integrate by parts once with respect to x all the derivatives appearing
when developing [zV&>0(x + tz)]r to get
(2.6.9)
where /?* is such that 1/p + l/p* = 1.
It remains now to use the change of variable z' = z/s in the above integral
to obtain
<wo(x)-a>g(x)]0(x)dx <Ce r |0li, P * /
JR
|z| r |f(z)|dz,
(2.6.10)
2
which proves our claim.
Let us next set e = co — of. Subtracting Eqs. (2.6.1)—(2.6.3) from the Euler
equations satisfied by (u, co) we get
de
— + div(u e*0 = div[(ue - u)<w],
(2.6.11)
e(;0) = oj0-a)£0.
(2.6.12)
dt
Since, by relation (2.6.4), the derivatives of u£ are bounded uniformly with
respect to s, we can apply Theorem A.2.7 [estimate (A.2.12) with m = 1, A =
1] to obtain
IH-, Oll-i.p < C \\\eo\\-uP + f ||(u - u £ )0, j)|| O l , ds].
L
Jo
J
(2.6.13)
Now we can write
u - ue = (K - K e ) +p co + Ke •p ^ = K *^ (tw - fe * p tw) + Ke * p e.
From Calderon's theorem [estimate (A.3.6)], and the arguments already used
2.6. Convergence and Conservation Properties
39
for the proof of relation (2.6.6) above we get that:
| | K * p (CO — t;e *p O))\\o,p < C\\(O — £e +p (x)\\-\,p < C£ r |Mlr-l,oo,
and thus
llu - u£||o,^ < C(sr + |k||_i,p).
(2.6.14)
Combining relations (2.6.6), (2.6.13), and (2.6.14) yields
l k ( - , O I I - i , P < c L r + / \\(e)(.,s)\\-ltPds
Our estimate (2.6.5) then follows by Gronwall's theorem.
.
•
We can now give the proof of Theorem 2.6.1.
Proof of Theorem 2.6.1. Let h > 0 and fix m large enough so that ms > r.
We are going to prove that
||ue - u ^ l o ^ = O(hm£l'm).
(2.6.15)
Together with relation (2.6.5) and the overlapping condition h < sl+s, this will
prove our result.
Since r > 1, in view of relation (2.6.4) we know that, for t < T, ||u£||i7OO is
bounded uniformly with respect to s\ moreover, using the smoothing properties
of the kernel K£ [estimate (A.3.7)], we can write |u e(-, Ok.oo = 0{sx~k). In
other words, there exists a constant C* such that
k=2
We then introduce the time 7)* defined as
A
= max t > 0; ||u 0, Oili.oo +
k=2
*-V
(., 0k,oo < 2C* . (2.6.16)
If we denote by eh the vorticity error coe — toh, we readily see that eh satisfies
dt
-ue)coel
L
(2.6.17)
(2.6.18)
40
2. Vortex Methods for Two-Dimensional Flows
We can therefore write eh = ah + f}h, where
+ div(uV) = 0, a%=ah(;0) = coeQ-
(2.6.19)
ot
d6h
^ ) =
— + div(u^)
- ue)<ye],
ot
, 0) = 0.
(2.6.20)
The term ah reflects the influence of the particle discretization, whereas the
control of fih is related to the stability of the method.
Let us first analyze ah.
If 0 is a smooth test function, in view of Lemma A. 1.2 we can write
R </>>! = /
JQ
If we develop the derivatives of
COQC/),
\(ah0,<p)\ <
we deduce that
m
ChmJ]\<P\k,p,\coe0\m-ktl>,
k=0
where, as usual, we have denoted by p* the conjugate exponent to p. Next, recall
that COQ has been obtained through a regularization of CDQ by the cutoff function
£e and that, by assumption, COQ is at least in W loo (£2), whence |&>ok,/?* < Cs~k,
for k < m, and \<oe0\miP* < Cel~m.
Thus
<Ch
\k=\
Thanks to Lemma A.2.8, this allows us to split ot\ into m components as follows:
k=0
L
\o,p
<- Chm£~m+{
I\-k,,P -< Chm8-m+k for 1 -< k <- m
Since problem (2.6.19) is linear, this decomposition in turn leads to a decomposition of a in components a\ solutions of
dt
- ue)cos],
ahk(-, 0) =
a\.
2.6. Convergence and Conservation Properties
41
In view of the definition of T£ in Eq. (2.6.16), we can use Theorem A.2.7
[estimate (A.2.12)] with A = e~\ a = u \ and a0 = 0 and write each of these
components as a sum of smoother components:
0<l<k
with
10,/?
x
<
Chm£-m+{,
_kp<Chm£-m+\
Oil
k,0
\<l<k
for 1 < k < m.
(2.6.21)
The above decomposition gives us a precise account for the consistency of the
particle discretization.
Let us now turn to the stability analysis. From Eq. (2.6.20) and Theorem A.2.7
we infer that, for t <T£,
Hj8*(.,OII-i,p < C / \\(ue -uh)('9s)\\0iP\\a>e(-,s)\\o,oods.
Jo
(2.6.22)
By relation (2.6.4), ||a/||o,oo is bounded independently of e. Moreover,
u* - u* =
•
£
<
0<l<k,0<k<m
and we can use the smoothing properties of the kernel Ke [estimate (A.3.7)] to
write, for t <T£,
Hue-
(2.6.23)
<C
Now straightforward calculations starting from relations (2.6.21) precisely lead
to
m l m
<Chmss -
Therefore, combining relations (2.6.22) and (2.6.23) yields, still for t < T£,
\\(u£ -uh)(-,t)\\o,p
<c\hmel-m
+ f Uue-uh)(',s)\\o,pds].
(2.6.24)
By Gronwall's theorem, this proves that Eq. (2.6.15) holds up to time T£.
42
2. Vortex Methods for Two-Dimensional Flows
It remains now to prove that actually T£ = T. For that we differentiate our
estimates at time T£. From relation (2.6.22) we deduce that
Our cutoff function is C°° so that we can differentiate the velocities as much
as we wish. Moreover, recall that h = £l+s and we have chosen m such that
ms > r. Thus
I|U£ - VLh\\k,p < Chm8l-m-k
< Csr~k.
We now use the fact that, for p > 2, Wk+hp(Q) C Wk^°°(Q)C Wk>p(Q),and,
by interpolation [estimate (A.3.5)], we deduce from the preceding estimate that,
up to time 7^*,
\\ue-uh\\k,oo<Cer-a-k
for all positive a. This yields
k=2
k=2
Finally, from our choice of the constant C*, we obtain, after choosing a < 1/2
and s small enough,
k=2
If we had T£ < T, by time continuity, the above estimate could allow us to
find a larger time t that satisfies the estimate required in the definition of 7^*, in
contradiction with the fact that T£ has been chosen to be as large as possible.
Therefore T£ = T, and our proof is completed.
•
Let us now briefly indicate how the same error estimates can be obtained for
the Euler equations in the whole space or in domains with solid boundaries.
In the first case, the only technical detail that has to be carefully studied
originates in the fact that, because our domain is not bounded anymore, Sobolev
estimates have to take into account the fact that a function can decay at infinity
2.6. Convergence and Conservation Properties
43
less rapidly than its derivatives [see estimate (A.3.4) and the comment following
Theorem A.3.1]. One thus needs to handle separately components of the error
that are derivatives and components that are not. If we look for error estimates
for the velocity in Lp, these later components have to be controlled in Lq,
instead of Lp, where q is the Sobolev conjugate exponent to p. Except for this
slight modification, the proof goes along the same line as that of the one given
above (see Ref. 60 for the details in the case of smooth data).
For the case of a bounded domain with solid walls, let us assume no-throughflow boundary conditions and that COQ e WQ~1OO(Q) (this is the situation indicated at the beginning of Section 2.5). The vorticity remains in the same space
for all time and the velocity is then given by the system of equations (2.5.1)
and (2.5.2). It is easy to check that the vorticity remains in WQ~1'°°(Q) for all
time. The mollification consists of the convolution with a cutoff function after
the vorticity is extended by zero outside Q. This procedure leads to the same
estimates for the regularization error as in the periodic or unbounded cases. To
obtain optimal (in terms of the regularity of the flow) error estimates we need
to initialize the particles on a smooth vorticity field, as was done in the periodic
case, with the additional constraint that it must vanish at the boundary. This
can be done through a classical regularization-truncation technique. One then
obtains COQ infinitely smooth, vanishing as well as all its derivatives on 3 £2 and
satisfying \\co£0 - <JDQ\\-\,P < Cer. Estimates (2.6.4) and (2.6.5) are still valid,
and the convergence proof can proceed as in the periodic case.
So far, only semidiscrete vortex schemes have been analyzed. A convergence
proof for fully discrete schemes, that is, those in which the particle paths are
obtained through a time-advancing method, is given in Ref. 8. The remarkable
feature of this result is that, whatever method is used, no stability constraint on
the time-step conditions the convergence of vortex methods. Unlike grid-based
methods, vortex methods do not suffer any Courant-Friedricks-Levy condition
relating the size of the time step to the minimal grid size. For high Reynolds number flows, if one wishes to resolve the viscous scales, this may lead to important
computational savings. The convergence rate of the method is O(er + Ats),
if an sth-order time-stepping method is used. The unconditional stability of
vortex methods can easily been understood in light of the convergence proof
just given. Let us for example consider the case of a forward Euler time discretization. It is not difficult to realize that the vortex method based on this time
discretization of the particle trajectories is a continuous-in-time discretization
of a modified Euler equation in which the velocity, instead of being computed
at each time, would be frozen at the beginning of every time step. Clearly this
modified Euler equation enjoys the same stability and regularity properties as
44
2. Vortex Methods for Two-Dimensional Flows
the original system. If one denotes by u Ar its solution and by uAtyh the velocity
for the fully discrete vortex scheme, one thus has
u Ar - u A M l = O(sr).
On the other hand,
nAt
-u=
which gives the expected convergence result.
Some comments on the result of Theorem 2.6.1 itself are now in order. First,
when one looks at its proof, there is a clear distinction between the roles played
by the first-order and the higher-order derivatives of the velocity. While there
is a compensating effect that makes it unnecessary to control uniformly with
respect to the smoothing parameter high-order derivatives, the lack of control
of the first derivatives would introduce an exp(—C/e) term in front of all other
error terms, which would be catastrophic. Convergence for flows that do not
have this minimal smoothness is still an essentially open question. We will
briefly survey in Subsection 2.6.2 below some partial answers that have been
given to this question. Note that, even for smoothflow,the exponential constant
in the error estimates reflects a possible deterioration of the accuracy of the
method as time goes on. This important fact, which we have already observed
in Section 2.4, is acknowledged in all the numerical studies of vortex methods.
We will discuss it in more detail and see how to improve this aspect of vortex
methods in Chapter 7.
Let us finally comment on the regularization step introduced at the initialization of the method. Theorem 2.6.1 can also be understood as a convergence
result for an infinitely smooth initial vorticity field but one in which the strength
of the derivatives of the vorticity is explicitly taken into account. Assume for
example that, through a vorticity generation at some boundary in a viscous
flow, we have to deal with an initial vorticity field in which small scales related
to the viscosity are present, resulting in high values for the derivatives. More
precisely, let us assume that
|u|i,oo<C,
Mkj^Cv^
for£>l
(this scale law is discussed in the context of two-dimensional turbulence in
Ref. 100). In other words, we are in a situation, important in practice, in
which diffusion plays the role of the regularization artificially introduced in
our scheme. The above proof shows that if we choose e < Cv1//2, the error
2.6. Convergence and Conservation Properties
45
estimate for the velocity in L 2 is
Huv -11*110,2
<Cerv~r/\
where we have denoted by uy the exact solution for a given viscosity, r is the
order of our cutoff, and C is a constant independent of v (of course here we take
into account the viscosity for the scales but forget it in the equations of the fluid,
so we actually compare numerical and exact solutions of the Euler equations).
This means that, if we consider v as a small parameter, convergence in the
treatment of the advection part of the flow (not speaking about the diffusion)
will be achieved if e <$C Cv1//2, as could have been expected.
Let us also mention some recent results [56] in the same spirit concerning the
convergence of particle methods in the linear case, with optimal convergence
rates. In this analysis, particles are initialized on a smoothed field but with a
mollification scale equal to h instead of e. In this case the cutoff functions have
to satisfy discrete rather than continuous moment properties, and the method
is very much reminiscent of regridding strategies, which will be discussed in
Section 7.2.
2.6.2. Other Convergence Results
As we have seen, the key ingredient in the convergence proof is the uniform
control of first-order derivatives of the velocity. We wish here to address briefly
some limit cases when this control cannot be guaranteed.
The lack of control of the flow derivatives can happen for two reasons:
• the continuous flow field itself is not C 1 ,
• the overlapping condition is not satisfied, which does not allow us to recover
uniform control of the computed velocities.
In the first situation, there is one case in which it is possible to bring the analysis
back to the smooth case. This is when the lack of estimates for the derivatives of
the velocity comes from oscillations in the initial vorticity field. More precisely,
following Ref. 77, assume that
co0(x) = /(x;x/(5),
where / is a smooth function defined in [0, I] 2 and 8 is a small oscillation
parameter. Then it is possible to prove the following homogenization result:
u -> uin L 2 ,
46
2. Vortex Methods for Two-Dimensional Flows
as 8 —>• 0, where u denotes the velocity field corresponding to the mean initial
vorticity field a)0(x) = J[Ql]2 /(x; y) dy.
This means that oscillations cancel in the computation of the velocity. E
and Hou [77] were able to prove through sharp estimates of the error that the
same cancellation property is true for the vortex method. Although there is
clearly no uniform bound with respect to 8 of the derivatives of the velocity, the
approximate velocity field converges strongly to the exact one independently
of the oscillation parameter 8, except for some exceptional values of 8 (to
avoid these exceptional cases, the authors use the notion of convergence that is
essentially independent of 8).
If one now tries to attack the problem of lack of control on the derivatives of
the velocity from a more general point of view, a natural idea is to try to obtain
a priori estimates on the smoothed approximate vorticity a)h8 = coh * t;£.
If the initial vorticity is in some Lp for p > 1 and thus the exact vorticity
remains in the same Lp and if one is able to prove that o)he is bounded in Lp
independently of £ and h, then standard compactness arguments will allow one
to prove easily the strong convergence of the velocity field.
This is the point of view developed in Ref. 46, in which p = oo. To prove
uniform bounds for the vorticity it is crucial to control local accumulations of
particles. Assume that f has support in the ball of radius 1 and denote by Jh(t)
the maximal number of particles in a ball of radius e\ then one clearly has
\\<ohB\\Loa
<Ch2s-2Jh(t).
The coefficient Jh can be evaluated in terms of the minimal distance between
particles, which itself, because of the incompressibility of theflow,depends on
the maximal distance l(t) between particles initially at distance h from each
other:
Jh(t) < C£2h-2[l + Cl(t)/ef.
If the flow was Lipschitz-continuous, then l(t) would remain of the order of h\
however, in our situation the best one can expect is a quasi-Lipschitz approximate flow (that is, Lipschitz up to a logarithmic correction), and thus
lit) <Ch-ta\
where ah denotes a tentative L°° boundfor the vorticity.
If one assumes an overlapping condition of the type h < Csl+s, a boot-strap
argument allows one then to conclude that an L°° bound actually holdsfor the
vorticity, up to time T* such that (1 + s) exp(-CT*) = 1, for some constant
2.6. Convergence and Conservation Properties
47
C. That r* -> 0 if s -> 0 translates the fact that the deterioration in the control
of the particle dispersion requires more and more overlapping as time goes on.
The same basic strategy (namely trying to obtain enough a priori estimates
to prove strong convergence on the velocity) has been more recently used in
Ref. 37 under weaker regularity assumptions (COQ G L P for some p > 4/3). The
proof makes more extensive use of the incompressibility of the flow. The basic
remark is the following: Assume that p = 2 and a is an incompressible velocity
field and denote by £ e 3 all possible random initializations (see Section A.I
for a more clear-cut definition), in the unit square. Then one can control the
difference between the smoothed approximate and exact vorticities advected
by a in the following sense:
U
1=1
2
(2.6.25)
where Xa denotes the characteristics associated with the flow field a. Observe
that this estimate, which easily follows from Lemma A. 1.3, does not require any
smoothness for the velocity field a (provided it is divergence free). It yields an L1
estimate for the smoothed particle approximation for almost all initializations as
soon as A^ ^> s~2, a condition that is similar to the usual overlapping condition.
To be brought back to the above linear analysis, one needs to consider a
time discretization of the Euler equation, with advection of the particles given
by the flow field at the beginning of each time step. Every new time step
eventually requires a new initialization of particles, something that can be done
by resampling the smoothed particle solution at fresh random locations. The
proof of the convergence of the overall algorithm follows from a precise control
of the exceptional set of initializations, for which estimate (2.6.25) fails, in order
to prove that it is possible to find sequences of initializations that will provide
L2 estimates at every time step.
One can guess that the random resampling involved at the beginning of every
time step induces a numerical diffusion. It is actually possible to prove that, for
an appropriate choice of the discretization parameters, the algorithm provides
a convergent approximation to the Navier-Stokes equations (see Chapter 5 for
a discussion of resampling schemes in the context of vortex schemes for the
Navier-Stokes equations).
Let us now turn to the second aspect of convergence mentioned above, namely
the case in which the overlapping condition is not satisfied. The extreme case of
48
2. Vortex Methods for Two-Dimensional Flows
this situation is the one in which e = 0. In the resulting method, often called the
point-vortex method, to compute the velocity of a given particle, one exactly
adds the contribution of all other particles (the self-velocity created by the
particle under consideration itself is, however, forgotten).
This method has been proved in Ref. 95 (see also [109]) to converge quadratically to the exact solution, provided it is smooth enough. The structure of the
proof resorts to techniques used in the early analysis [25]. It consists of using
discrete norms on the particle locations. More precisely let us denote by X; and
Xj* exact and computed locations, respectively, of the particles (starting from a
deterministic initialization on a mesh of size h) and set, for p > 1,
To prove the consistency of the method, one first finds out how much the exact
particles fail to solve the differential system giving the locations of the numerical
particles; one thus writes
where pi stands for the discretization error. But we have
u(X,) =K*a>(Xi) = JK[X-
X(t; y, 0)]co0(y)dy,
(2.6.26)
so that pi amounts to a quadrature error of the kind analyzed in Lemma A. 1.2.
Because K is not smooth it seems that only first-order accuracy can be obtained;
however, because K is odd (a property first exploited by Beale [19]) one can
subtract the singularity of K and show second-order accuracy. Thus pt = O(h2).
Next, to show the stability of the method, one subtracts the equations of
motions of exact and numerical particles and gets
^
K X
( ? ~
Xh
j) ~ K&i ~
X
;)M
2
+ A-
(2-6.27)
Let us now assume for a while that the numerical particles remain well separated
in the sense that they satisfy, like the exact particles, the property
i^7=>|X?(0-Xj(r)|>C*/i
(2.6.28)
for all time t e [0, T] and some constant C*. This allows us to replace within
the sum on the right-hand side of Eq. (2.6.27) the kernel K by the convolution
2.6. Convergence and Conservation Properties
49
K/j of K with a cutoff &(x) = h~2t;(x/h), where £ has support in the ball
of radius C*. Then we can use the stability estimates derived for the regular
smoothed vortex methods to get
£[K(X?-X$)-K(X.-X,-)]
<
C\\e\\i
(the norms above are discrete Lp norms; we can obtain this estimate by writing
a Taylor expansion of the left-hand side with an integral remainder and then
using Calderon's theorem).
Together with Eq. (2.6.27) this yields \\e\\iP = O(h2). Finally we note that,
since by the smoothness of the flow the exact particles are well separated, this
in turn implies that Eq. (2.6.28) is actually satisfied. A boot-strap argument
allows us to conclude.
2.6.3. Convergence of the Variable-Blob Method
As we have seen in Section 2.2 it maybe useful to compute particle velocities
on the basis of blobs with nonuniform core size, with formulas of the type
The convergence analysis corresponding to this situation has been given in
Refs. 106 and 107. In 106, the core size is assumed to be given through an areaconserving mapping. This allows us to handle to some extent shear flows, in
which blobs could be elongated along the strain direction, but not more general
flows, in particular, wakes in which blob volumes should be allowed to increase
as particles move downstream. Here we outline the proof given in Ref. 107, in
which blobs can vary in a more general fashion. More precisely let us assume
that there exists a smooth function / such that
s(x) = sf(x) with 0 < C < /(x) < C.
(2.6.29)
In view of the preceding discussions, the particle discretization error is clearly
controlled as in the case of uniform blobs. We thus need to focus on only the
regularization error, which can be expressed as
= /
- 0(X),
where 0 is a smooth test function. For simplicity, let us assume that the cutoff £
has a compact support of size unity and is of order r in the sense of Eqs. (2.3.1).
50
2. Vortex Methods for Two-Dimensional Flows
We first set
e(y) •
In view of Eq. (2.6.29) we can write
dzt
1 L
\S
en
3/
and a Taylor expansion of / around x yields
5» + V e*z*at + 0 (er).
k=\
This first shows that, for e small enough, y —> z defines a one-to-one smooth
mapping and that the Jacobian of this mapping can be evaluated as £(y)2
[1+ Y!k=\ £kzkh] + 0{sr). As a result
and we can rewrite E as
E = J[(/)(y)-(t)(x)]t;£(y)(x-y)dy+O(sr).
If 0 is of class C r , its Taylor expansion gives
E=
\a\<r
On expanding / again around x, one finally obtains
E= Yl
llr,ooeN fza
\a\<r-l
and, in view of Eqs. (2.3.1), E = O(sr). The vortex method with smoothly
varying blob size has therefore the same convergence properties as those of
uniform blobs. We will give in Chapter 5 numerical illustrations of variableblob techniques in the context of the Navier-Stokes equations.
2.6.4, Conservation Properties
Besides theoretical convergence, another important criterion for the efficiency
of a numerical method is its behavior with respect to the natural invariants of
2.6. Convergence and Conservation Properties
51
the flow. For the two-dimensional Euler equations, such invariants are the total
circulation,
Io =
co(x, t)dx,
the linear and angular impulses,
/
r
xco(x,t) dx, h =
\x\2co(x,t)dx,
j
and the energy
E = / |u(x, t)\2dx.
We can obtain the numerical equivalent of the first three invariants by replacing
co with coh and taking the duality of this measure with the functions 1, x, or |x| 2 .
We obtain
(0 =
Note that the definition of these quantities does not rely on vortex blobs, but
only on particles of vorticity. The definition of energy requires more care. As
a matter of fact it can be easily checked that, in general unbounded flows, the
velocity decays at infinity like |x| - 1 and therefore cannot have finite energy,
unless the circulation is 0, in which case the velocity decays like |x| ~2. However,
it is possible to write an always well-defined energy as
E' = / ^r(x, t)co(x, t)dx=
/ / G(x - xV(x, t)co(x', t) dxdx'.
In the above expression, j/r is the stream function associated with the incompressible velocity u. It is easy to check that E1 is always finite, provided the
vorticity decays fast enough at infinity, is constant in time and,finally,as shown
by an immediate integration by parts, is equal to the energy defined in the usual
way when the velocity decays like |x|~ 2 at infinity.
We naturally obtain the equivalent of E' in a vortex method by replacing G
with G£ and co with coh. This yields
52
2. Vortex Methods for Two-Dimensional Flows
Theorem 2.6.3. Assume that £ has radial symmetry. Then all four invariants
ij2, i e [0, 2] and Eh are conserved by the vortex method.
Proof. Let us first check the assertion for l\ (ifi is obviously conserved). We
have
dl
X~^
P
p
h( h
\
p
that is,
But, since £ is even, K£ is odd, and exchanging the indices p and p' in the
above sum turns it into its opposite. So it must be zero, which shows that l\ is
constant.
Let us turn to l\. We have
J jh
ai
2 _ Y ^ . , ^h
at, — z_v P p
P
ATJI
U
*P _ V ^ , „ vh
/-^
ati —^~"^
P P
P
v £ f vh
\ P
^h \
P')'
p,p'
Writing xhp = \{xhp + x^) + \{xhp - xhpl) allows us to split this sum into two
pieces. The first one is readily seen to cancel out, by a symmetry argument
similar to the one just used. The second one is given as
We claim that each term of this sum is zero. Indeed, since f has radial symmetry,
we have G£(x) = G e (|x|), and thus
is orthogonal to x.
The fact that E'h is also conserved can be checked with the same techniques.
However, it is enough to recognize that the system of ODEs governing the
motions of particles is Hamiltonian, with Hamiltonian E'h [considered as a
function of (xh)p]. As a matter of fact, we can write for each particle xh =
dxhp{
1 3Efh
~^T~^axp'
dxhp2 _
\
dEfh
dt ~ apdxhp1'
2.6. Convergence and Conservation Properties
53
The energy E/h is therefore automatically conserved along the trajectories of
the system.
•
As mentioned in the discussion of vortex sheet calculation at the beginning
of this chapter, the conservation of these invariants is a clear indication that,
unlike most grid-based methods, vortex methods are naturally free of numerical
dissipation resulting from spatial discretization.
Time discretization of the equations governing the particle trajectories is of
course a potential factor of discrepancy in the conservation properties of the
vortex method. However, it is observed in practice that reasonably high-order
schemes (second-order Adams-Bashforth or Runge-Kutta schemes) allow us to
satisfy energy and moment conservations rather well, even for large time steps.
As an illustration, let us consider again the case of a circular patch subject to high
distortion. Figure 2.7 shows the time evolution of energy and angular impulse for
two values of the time step (At = 2, At = 1) with a fourth-order Runge-Kutta
10
15
20
25
30
35
45
50
(a)
Figure 2.7. (a) Angular impulse, (b) kinetic energy for a circular patch co(x) = (1 - |x| 2 ) 3
and a time step At = 2 (dashed curve) and At = 1 (solid curve).
54
2. Vortex Methods for Two-Dimensional Flows
(b)
Figure 2.7. {Continued)
scheme. These results confirm that, despite the deterioration in the accuracy due
to the shear in the flow, there is no limit in the conservation of h and E coming
from the spatial discretization (note that, based on the total circulation of the
patch, a time step of 1 corresponds in average to 1/8 of a complete rotation). In
practical implementations of vortex methods, conservation of angular impulse
and energy can always be considered as essentially satisfied.
Three-Dimensional Vortex Methods
for Inviscid Flows
The need of a specific discussion of vortex schemes in the context of threedimensional flows stems from the very nature of the vorticity equation that in
three dimensions incorporate a stretching term. This term fundamentally affects
the dynamics of the flow; it is in particular responsible for vorticity intensification mechanisms that make long-time inviscid calculations very difficult.
Vorticity stretching is considered as the mechanism by which energy is being
transferred between the large and the small scales in theflow.In order to resolve
related phenomena, such as the energy cascade, an adequate treatment of diffusion is thus even more crucial than in two dimensions. However, the recipes for
deriving diffusion algorithms are the same in two and three dimensions (they
are discussed in Chapter 5), and we focus here on inviscid three-dimensional
vortex schemes. Vorticity intensification in general is associated with a rapid
stretching of Lagrangian elements, which makes it also crucial to maintain the
regularity of the particle mesh; we refer to Chapter 7 for a general discussion
of regridding techniques.
We will discuss here two classes of vortex methods that extend to three dimensions the two-dimensional schemes introduced in Chapter 2. In the first
one, the vorticity is replaced by a set of points (particles), just as in two dimensions, but these particles carry vectors instead of scalars. The stretching term
in the vorticity equation is accounted for by appropriate laws that modify the
circulations of the particles. We call these methods vortex particle methods.
The second class of methods, the so-called vortex filament methods, is of
a different nature. Here, the quantity carried by the Lagrangian computational
elements is a scalar, as in two dimensions, but these elements are no longer
discrete points but rather curves - filaments - that carry circulation. The vortex
filament methods have in common with the two-dimensional particle schemes
the fact that the weights of the computational elements remain constant in time.
55
56
3. Three-Dimensional Vortex Methods for Inviscid Flows
A third class of methods, combining vortex particles and a grid-based Poisson
solver for the calculation of particle velocities, will be described in Chapter 8.
Historically vortex filament methods have preceded vortex particle methods
[71,134,136,51]. The reason is probably that they have a more natural physical
interpretation than vortex particle methods; in particular their definition is very
reminiscent of Kelvin's circulation conservation theorem, which is one of the
main properties of inviscid three-dimensional flows. As we will see, this is
reflected by a very good behavior of the method with respect to the fundamental
invariants of these flows.
Although there are in practice some strong links between the implementation
of vortex filament and vortex particle methods, it seems that the latter have
been only recently formalized [8]. From a numerical point of view, they can
be considered as a more straightforward generalization of the two-dimensional
schemes, with the appropriate modifications to handle vortex stretching.
For both classes of methods, we will follow in Sections 3.1 and 3.2 the same
general outline: first we give the definitions, then we discuss their conservation properties, as this is where the differences between the physical nature of
these methods are best understood, and we give some numerical illustrations.
We also underline in Section 3.2 the links, from the computational point of
view, between filament and particle methods. The convergence analysis for the
methods of both types is done in Section 3.3. A specific discussion is devoted in
Section 3.4 to the important issue of the divergence of the vorticity field when
discretized by vortex particles.
3.1. Vortex Particle Methods
Let us first recall (see Chapter 1) the vorticity-velocity form of the Euler equations in three dimensions. The vorticity u) = V x u is a vector and satisfies
dm
— + div(u : u>) - (u> • V)u = 0,
dt
w(.,0) = o;o,
U = K*CJ.
(3.1.1)
(3.1.2)
(3.1.3)
The notation u : u? stands for the tensor of component UICOJ and div (u : w)
is the vector of component duiCOj/dxt. We assume here and throughout this
chapter that the velocity vanishes at infinity or is periodic.
The kernel K is now a matrix-valued function such that
K* w(x) = -^~ [ T ^ ^ T3 x w(y) dy = curl(G
An J | x - y |
3.1. Vortex Particle Methods
57
In the above formulas G(x) = (47r|x|)~1 is the elementary solution of the
Poisson equation in three dimensions and x denotes the vector cross product.
In Lagrangian form Eq. (3.1.1) can be rewritten as
In this formulation, it is clear that one basic feature of this system is that
the stretching term can produce local intensification and reorientation of the
vorticity, resulting in particular in a loss of regularity for the solution in a finite
time, depending on the strength of the initial vorticity.
3.1.1. Definitions
Equation (3.1.1) is a transport-deformation equation for the vorticity. Based on
the discussion in Appendix A.2 (see in particular Corollary A.2.6 and the comment on systems that follows), a vortex particle method is obtained by setting
~~
-<«)},
(3.1.4)
where the particles xhp follow the trajectories defined by the vector field u^ and
ochp are vectors that solve the ODEs:
da !1
j f <-=<*"
*pp
Vu" (x*, t) = [Vu* ( 4 , t)] [a"p].
(3.1.5)
In the above system [Vu^IaJ] denotes the product of the matrix {duht /dxj)t .
by the vector oth.
As in two dimensions, to account for the nonlinear aspect of the flow equations, the vector field u^ is reconstructed from the vorticity field by application
of the Biot-Savart law (3.1.3) to a mollified vorticity field. To this effect we
choose a cutoff function f satisfying moment conditions up to the order r; then
we set
Finally the velocity is computed as
uh=Ke*dl,
(3.1.6)
where the above convolution has to be understood in the sense of vector products, as in Eq. (3.1.3). The actual calculation of the regularized kernel follows
58
3. Three-Dimensional Vortex Methods for Inviscid Flows
the same lines as in two dimensions. If f is a spherically symmetric cutoff
function, one obtains
where
f(r)= I $(s)s2ds.
Jo
The rules given in Section 2.3 to construct high-order cutoff functions apply
in three dimensions as well. For example, combining two cubic Gaussians at
scales 1 and 2~ 1/3 leads Beale and Majda [26] to the following fourth-order
kernel:
The method is finally defined by Eqs. (3.1.4)—(3.1.6). The initialization of
particles is done along the same lines as in two dimensions. Typically particles
are initially located at the nodes of a uniform grid, and they are assigned a circulation o?£(0) equal to the local vorticity multiplied by /z3, where h is the grid
size. Other choices can obviously be made to take advantage of the particular
geometry of the initial vorticity field or to allow local grid refinements.
We now come to two variants of the method just presented. They are both
based on the following algebraic identity:
[VU][CJ]
— [Vu] r [w] = (jj x curlu = 0.
Hence the Euler equations can be expressed with an equivalent formulation
if we replace the stretching term (u; • V)u = [Vu][w] with [ V u ] r M or any
algebraic combination of both forms. This leads to two new schemes in which
Eq. (3.1.5) is replaced with either
doc\
, T r .n
— p - = [Vuh]T[oLhp]
(3.1.7)
or
dcx\
1
,
, _ _ ..
h
E. = -([Vu*] + [Vuh]T) L \cx
p] ].
dt
2
(3.1.8)
It is important to observe that, although based on equivalent formulations of the
equations, these schemes do not lead, after discretization, to the same numerical
method, for with definitions (3.1.4)—(3.1.6), u / ^ V x u h. However, one
3.1. Vortex Particle Methods
59
can already predict similar convergence results for the three schemes. Observe
that the scheme of Eq. (3.1.8) allows some computational savings over the
original scheme of Eq. (3.1.5) because of the symmetry of the kernel involved
in the computations of the weights. We will show below that Eq. (3.1.7), often
referred to as the transpose scheme, offers the advantage of conserving the total
circulation [45, 197].
Another conservative vortex scheme can be derived based on the conservative
form of the stretching term. If we rewrite the stretching term in Eq. (3.1.1) as
div (a; : u), to derive a vortex scheme we need to expand this term as
div(u? : u) = (u> • V)u + u(divu;).
We thus have to evaluate divu? on the particles. A general recipe for differentiating a particle field is to regularize it, then to differentiate the resulting
smooth field, and finally to evaluate it on the particles. However, proceeding
this way and combining the result with a treatment of the term (u) • V)u with
derivatives of the velocity obtained by differentiating Eq. (3.1.6), as for the
preceding schemes, would not lead to a conservative method. To overcome this
difficulty one has to apply the same strategy in the computation of the velocity
derivatives as for the derivatives of the vorticity in the term div UJ and use the
formula
where x^ and vp are the locations and the volumes of particles, respectively,
and up are their velocities obtained through the regularized Biot-Savart law.
Assuming for simplicity that the cutoff f has spherical symmetry, we obtain
the following vortex scheme (where, for clarity, we omit the superscript h):
(3.1.9)
ai
In this formula OJP denotes the local vorticity values (the circulations are given
by OLP = VpUJp) and the superscript j refers to the components of the vorticity. A
version of this scheme in the context of vortex-in-cell methods will be presented
in Section 8.2.
3.1.2. Conservation of Circulation
The basic invariants of three-dimensional inviscid flows are the total circulation,
the linear and the angular impulses, the energy, and the helicity. In this section
60
3. Three-Dimensional Vortex Methods for Inviscid Flows
we restrict ourselves to the circulation,
=/*(«.
t)dx,
(3.1.10)
whose conservation turns out to be already a difficulty for vortex particle
methods.
Let us first recall the reason why the circulation is conserved for the continuous equations: since divu? = 0, the stretching term can be written in a
conservative form, div(u; : u), and thus does not contribute to the production of circulation. Unfortunately, in vortex particle methods the vorticity u h
is no longer guaranteed to be divergence free: At time zero, the approximate
vorticity field is consistent with only pointwise values of UJQ on a discrete set
of points. This is clearly not enough to enforce a condition on its derivatives.
Henceforth there is no guarantee that the circulation will be conserved by the
original scheme of Eq. (3.1.5).
The fact that the approximate vorticity field, either in the particle form uJ1
or in its regularized form u)h * fe, is not divergence free is by itself a difficulty
that has long been a major obstacle to vortex particle methods. In principle
such a violation of the fundamental laws of fluid mechanics may result in a
nonphysical topology of vorticity lines (in particular the possibility of having
nonclosed lines). We will discuss this issue in more detail in Section 3.4.
Let us now turn to the so-called transpose scheme of Eq. (3.1.7). As we
already mentioned, its main feature is that it does conserve circulation.
Proposition 3.1.1. Assume that the cutofffunction f is even. Then the vortex
particle method defined by Eq. (3.1.7) is conservative in the sense that
d
Proof. Let us check the above identity for each component k. For simplicity
we will drop the superscript h. We can write
^-^ dut
v-^ [9K e
p,p'j
~ V)
p.p'
L
x a
p
3.2. Vortex Filament Methods
61
where the term inside the last sum represents a determinant. Since the derivatives
of Ke are even, if we exchange the role of p and /?', the sum is transformed into
its opposite. It must therefore be zero.
•
Unfortunately it does not seem possible to check that other natural invariants
are algebraically conserved by this method. We will also see that it has problems
with accuracy and the solenoidal condition. As for the scheme of Eq. (3.1.9), it
is clearly conservative by construction.
3.1.3. Numerical Results
Let us briefly summarize the numerical results reported in Ref. 23 by comparing
the efficiency of the schemes of Eqs. (3.1.5) and (3.1.7). It is hard to find test
problems in three dimensions, unlike in two dimensions, in which the exact vorticity is available and that does not reduce by symmetry to a two-dimensional
flow. The flow suggested by Beale et al. is a vortex ring with swirl. Its precise form - in particular the specific values of the vorticity inside its core is obtained through a variational approach (see Refs. 23 and 137 for details).
This is a steady solution, up to a uniform translation along the rotation axis, but
particle paths are helices so its vortex approximation is truly three dimensional.
It appears that the most accurate results are obtained with the original scheme.
However these tests were performed without any regridding of the particles and
it is plausible that, when the techniques of Section 7.2 are used, all schemes
yield about the same accuracy.
Vortex particle methods are particularly suitable for viscous flows, and numerical illustrations of these methods will be provided in the following chapters.
3.2. Vortex Filament Methods
A vortex filament is a vorticity field that is concentrated on a curve that is either
closed or extending to infinity; its direction is the local tangent at each point
of the curve, and its strength is the vorticity flux across a cross section of the
filament. For a collection of vortexfilaments,it is worthwhile to think in terms of
centerlines of vortex tubes, with longitudinal walls parallel to the vorticity field
and centered around each filament. The circulation of eachfilamentis evaluated
by the vorticity flux on cross sections of each vortex tube and, as we have seen
in Chapter 1, this flux is actually independent of the chosen cross section.
3.2.1. Definitions
This section is devoted to a rephrasing in mathematical terms the definition of
filaments and of Kelvin's theorem. This will be useful for a rigorous study of the
62
3. Three-Dimensional Vortex Methods for Inviscid Flows
conservation properties of filament methods, as well as for fully exploiting the
notion of weak solutions to advection equations that is, as in two dimensions,
the main tool in the convergence analysis.
Let us start with the definition of filaments.
Definition 3.2.1. Given a smooth closed oriented curve C in R3, we will call a
vortex filament with unit circulation supported by C the vector-valued measure
JJLC defined by
where ^y(^) defines an orientation-preserving parameterization of C, (p is a
continuous test function, and the quantity inside the integral is a scalar product
in R3.
It is easy to check that this definition does not depend on the chosen parameterization, that vortex filaments are automatically divergence free (take <p to be
a gradient in the definition and then observe that the quantity in the integral is
a total derivative along the curve), and that the flux of the vorticity along any
cross section is one.
The first distinctive feature of vortex filaments is that they are transported
by the flow with unchanged circulation. Let us give the mathematical formulation of this well-known fact in the framework of weak solutions to advection
equations.
Theorem 3.2.2 (Kelvin's circulation theorem). Assume thatu is a given smooth
function and that UJO is a vortex filament along the curve Co with circulation a
(in other words u> = oifiCo). Then the unique measure solution to Eq. (3.1.1) is
the vortex filament,
)
=a/jiC(t),
where C(t) satisfies
dC
—dt = u ( £ , 0 ,
£(0) = £ 0 .
Proof. Since we are dealing with a linear problem, we can of course assume
that a = 1. Following the definition of measure solutions (see Appendix A,
Definition A.2.5, and the remark following Corollary A.2.6), we have to show
3.2. Vortex Filament Methods
63
that
fT I
/
( /i£ ( r ) ,
\ H
Vo \
L
dt
T
1
\
J
/
(u • V ) 0 - [Vu] (j>\ (•, t) ) dt = (/x £ , </>(•, 0)).
If we denote by / the integral on the left-hand side above, from Definition 3.2.1
we get
/ =
</0
JC(t)
By differentiating with respect to £ the system 7 = 11(7, t), we obtain
97
87
31
Thus
,0 =
r), t]
, 0.
, 0,
Furthermore,
, 0,
0=
dt
0,
, 0,
and therefore
where 7 0 = 7(-, 0) is a parameterization of £0 and we have used the fact that
an admissible test function must satisfy 0(-, T) = 0. In view of the definition
of a filament we have finally verified that
which ends the proof.
•
We can then define vortex filament methods in a straightforward way by
coupling the definition
lit)
(3.2.1)
64
3. Three-Dimensional Vortex Methods for Inviscid Flows
with the filament dynamics
dChn
d{
=uh(Chp,t)=Ks*uh.
(3.2.2)
The mollified kernel Ke is computed as usual through the convolution with a
cutoff function; if £ has spherical symmetry, Ke = VG£, and G£ = G * £e, we
obtain the following formula for advecting the filaments:
where
P(r) = I ${s)slds.
-
/
•
Jo
In some sense, vortex filaments for the three-dimensional Euler equations
are very similar to vortex particles in two dimensions: their weights are scalar
and are passively transported by the flow; moreover, the number of degrees
of freedom (one per filament) is comparable with that for a two-dimensional
problem (one per particle). However, the way filaments are initialized requires
more care than for two-dimensional particles, since the initial filaments must
approximate not only the strength of the vorticity but also the direction of the
initial vortex lines of the real flow. Jets or wakes in temporal evolution provide
particular examples well adapted to this type of discretization (we will show
below in Subsection 3.2.4 illustrations of such flows). In complex geometries
this is not in general an easy thing to do, but in some important cases, physical
insight can help (as, for instance, when vorticity is generated at the edge of an
obstacle). Let us also mention that filament surgery is required when stretching
starts producing small unphysical scales within the filaments. This issue will
be discussed in more detail in Section 5.6, which is devoted to subgrid models.
Although vortex filaments have a clear physical meaning, one must be cautious not to push too far the physical interpretation. If we rewrite u^ as K •
(u/ * £e), we may view the vorticity field as a collection of vortex elements
centered around each filament. However, these elements are merely numerical
elements and not strictly speaking vortex tubes: In principle their core radius
£ is a numerical parameter that is constant along the filament direction (it can,
however, vary from one element to another, depending on the local refinement
desired in the direction transverse to the filaments, and some authors have used
core values that vary along filaments and in time) and vorticity is not parallel
3.2. Vortex Filament Methods
65
to the walls of these elements. As a matter of fact these elements have no individual meaning: They must be considered collectively. Furthermore, as we can
expect from the numerical analysis in the two-dimensional case (which, as we
will see below, carries on to three dimensions), their accuracy in representing
the real vorticity field is subject to an overlapping condition.
3.2.2. Conservation Properties
The beauty of vortex filament methods is most apparent in the behavior of
the method with respect to the natural invariants of three-dimensional inviscid
flows.
First it is clear by its definition that the method conserves the circulation.
This is linked to the fact that filaments, unlike vortex particles, are divergencefree particles. It is actually possible to go further and check that linear impulse,
angular impulse, and energy are conserved as well, provided the cutoff is an
even function.
Let us consider the linear impulse J x x (J1 dx. For simplicity in the notations we drop again the superscript h. Replacing as usual integrals using the
duality between measures and continuous functions and using the mathematical
definition of a filament, we can write the linear impulse as
2-E-, [/,>•'> *£
Observe now that
dt d$
^
so that integrating by parts over each filament yields
66
3. Three-Dimensional Vortex Methods for Inviscid Flows
Henceforth we have to check that
p
Using the explicit form of u = Ks • a;, we get
where, to avoid confusion, we have distinguished between the integration variables along Cp and Cq. Routine algebraic calculations then give
shn
-la
The second integral in the above right-hand side is zero because K£ is odd. As
for the first one, we note that
and thus
for all %q, which finally proves that A = 0.
The conservation of the angular impulse / x x (x x uS)dx follows from
similar arguments so let us now turn to the kinetic energy. For the continuous
equations we have
/
r
/ ^(x, t) - u(x, t) dx.
|u(x, t)\2dx=
j
Note that, unlike in the two-dimensional case, the integration by parts leading
to the above identity is always valid, provided that the vorticity decreases fast
enough at infinity. The reason is that the velocity then decays as |x|~ 2 and the
boundary terms on a sphere at infinity have no contribution in this integration
by part.
3.2. Vortex Filament Methods
67
For the numerical solution we argue as in two dimensions. The energy is computed with the formula below, based on the particle vorticity and the regularized
stream function:
E=
r
jjj£(x,t)-u>h(x,t)dx,
J
where
i\f = G£ * u / \
By the definition of uJ1 this gives
By differentiation we obtain
[u(7 p ) - u(7^)] • K e (7 p - ~/q
An integration by parts over filaments then gives
and a similar formula when p and ^ are exchanged. So Eq. (3.2.4) can be
rewritten:
+i
68
3. Three-Dimensional Vortex Methods for Inviscid Flows
We now recognize in the two terms between braces formulas for double-vector
products:
Using the definition of the velocity, we can finally rewrite this as
Jc
q
^1
3.2.3. Vortex Particles versus Vortex Filaments
In this section we discuss some practical considerations concerning the links
between vortex particles and vortex filaments. In an effective implementation of
a vortex filament method, it is obviously not possible to follow the continuous
curves. One needs instead to track afinitenumber of markers along these curves
and reconstruct the vortex lines at each time step, in particular to compute the
tangent vectors in the line integrals involved in the velocity computation of
Eq. (3.2.3).
These markers are clearly good candidates to be considered as vortex particles, and one may wonder about the possible links that result from this remark
between vortex filament methods and vortex particles methods as derived in
Section 3.1. Let us first clarify precisely the way markers can actually be used.
Each marker (indicated by a parameter §m along a given filament Cp) moves
from one time step to the next with its local velocity. Then markers have to
be linked to each other through some interpolation procedure to reconstruct a
curve. This in particular means that, with each marker, one can associate an
elementary vector line element dlm parallel to the filament direction. These ingredients are then mixed together to give a velocity field through the following
natural quadrature rule:
I,
x ^
dt;p ~ ^ K J x -
7p(|m)]
x dlm
3.2. Vortex Filament Methods
t
69
t + At
Figure 3.1. Stretching and markers along filaments.
This brings us back to a vortex particle method in which the circulations of the
particles are given by apdlm. The most natural (and crude) choice is to take
for dlm the vector linking two successive markers along Cp, which implicitly
means that we make a piecewise linear curve reconstruction. This is actually
the filament vortex method pioneered by Rehbach [171] and extensively used
since then.
To analyze this analogy further let us observe that if Xm and X m+ i are two
successive markers on a filament, with dlm = (X m+ i — X m )/A£, one has, to
the leading order (see Figure 3.1 for an illustration),
^ ( X m + 1 - Xw) = [u(X m+1 ) - u(Xm)] - [(Xw+i - X m ). V]u(X w ).
dt
As a result the particle strengths are, to the leading order, subject to the same
evolution rule as in Section 3.1. Vortex filament methods can thus be viewed
as vortex particles methods in which, the stretching has never to be explicitly
taken into account to update the circulations, but is instead implicitly recovered
through the modification by advection of the elementary line elements.
Of course the above discussion is based on first-order approximations of the
stretching. A more accurate procedure would require more careful reconstruction of filaments at each time step (some of the numerical results given below
are actually based on cubic interpolation). In this case, it is readily seen that the
vortex filament method becomes similar to a vortex particle method, in which
the rules to update the weights of the particles would use velocity derivatives
computed through finite-difference formulas along the filaments, with a finitedifference stencil and order related to the interpolation method used to track
the filaments.
70
3. Three-Dimensional Vortex Methods for Inviscid Flows
In summary, for inviscid flows, vortex filament methods can be viewed as
"clever" vortex particle methods, which take advantage of the connectivity
of the particle distribution to enable substantial computational savings. The
connectivity of the elements also facilitates the regridding/refinement strategies
that may become necessary. Since the locations of markers are monitored at
all times, it is easy to insert a new particle between two successive markers
whenever their distance exceeds a certain value. This critical distance is in
general taken to be of the order of the core radius used in the regularization of
the Biot-Savart kernel. This allows us to compensate for the vorticity stretching
parallel to the filaments and thus control the resolution in these directions. Knio
and Ghoniem [118] have also devised in a method called the transport element
method a way to monitor distances between neighboring filaments and insert
new elements in the direction transverse to the filaments.
As we have already mentioned, the drawback of the filament method is
that it relies on the knowledge of the topology of the vorticity at the initial
stage and whenever vorticity is created. Moreover, the Lagrangian character
of filaments is a purely inviscid property of three-dimensional flows: In the
presence of diffusion, points in neighboring filaments will exchange vorticity
through diffusion at a rate that depends on their distance, and the concept of a
unique circulation along a given material filament does not hold anymore. As
a result, there is no clear-cut way to simulate diffusion with a filament method,
although filament surgery or core-spreading techniques are sometimes used
to provide some dissipation mechanisms. It follows from these remarks that
filament methods are not readily suitable for wall-bounded viscous flows.
In closing, let us remark that similar comments hold for the two-dimensional
contour dynamics method [75, 167]. These methods consist of tracking level
curves of the scalar vorticity. These curves can be seen as filaments for the
gradient of the vorticity, which itself turns out to be the solution of a transportdeformation equation similar to the three-dimensional equation for the vorticity.
The only difference between the two methods, besides the dimension of the
discrete system, lies in the singularity of the kernels (logarithmic for contour
dynamics, r~2 for filament methods) used to compute the velocities.
3.2.4. Numerical Illustrations
We first present some numerical results due to Knio and Ghoniem [118, 119]
that can be seen as the three-dimensional counterpart of Krasny's calculations
in Section 2.1. The flow under consideration is a vortex shear layer, periodic
in the streamwise and spanwise directions, undergoing perturbations in both
directions. Vortices are initially distributed uniformly along filaments on a few
3.2. Vortex Filament Methods
71
material surfaces parallel to the shear layer plane. A typical grid resolution to
start these calculation involves 20 x 1 4 x 5 points in the streamwise, span wise,
and transverse directions, respectively. The initial perturbation is introduced by
moving the filaments through sine waves with small amplitudes in two directions.
Figure 3.2(a) shows vortices' locations in spanwise and streamwise cross
sections. One can observe the formation of roll-up in the streamwise direction,
typical of Kelvin-Helmholtz instability, while the three-dimensional character
of the flow is manifested in the mushroomlike structures in the spanwise direction, as a result of the braid distortion. Figure 3.2(b) shows the intensification of
the streamwise vorticity in the braids of the shear layer. A regridding strategy as
outlined above is crucial in order to obtain this kind of result. At the time shown
in these figures, the initial number of vortices has been multiplied by a factor
v lit
7 A
-C
y = 3.3 (AA)
(a)
x = 6.6 (CC)
/ = 12.0
t= 16.0
(b)
Figure 3.2. (a) Particle locations in plane cross sections for a shear layer instability
(x and y are the streamwise and the spanwise coordinates, respectively), (b) time evolution of the streamwise vorticity in the cross section D (courtesy of A. Ghoniem).
72
3. Three-Dimensional Vortex Methods for Inviscid Flows
-8.0
-6.0
-4.0
-2.0
0.0
2.0
4.0
6.0
8.0
Y
t = 0.312500e+00
(a)
Figure 3.3. Vortex filament simulations of the instability of an axisymmetric shear layer
subject to helical and azimuthal perturbations, (a), (b), (c), Streamwise and (d), (e), (f),
side views (courtesy of J. Martin and E. Meiburg).
of ~10, in response to a significant strain and surface area increase in the shear
layer. Knio and Ghoniem have extended the method to handle variable-density
and reacting flows (see Refs. 119 and 120 for details).
Figure 3.3 summarizes results obtained by Martin and Meiburg [146] on
the development of an axisymmetric shear layer subject to both helical and
azimuthal perturbations. The initial condition is similar to that given by Knio
and Ghoniem, except that here we consider the axisymmetric case. Circular
filaments are uniformly initialized on a ring, with uniform circulation, and then
slightly displaced to generate the perturbation. Periodic boundary conditions
3.2. Vortex Filament Methods
-8.0
-6.0
-4.0
-2.0
0.0
2.0
Y
t = 0.265625e+01
(b)
73
4.0
6.0
6.0
Figure 3.3. (Continued)
are enforced by use of image filaments in the computation of the velocity. At the
end of the calculation one can observe strong streamwise vorticity concentrated
in the braids connecting the main rings. In this computation a cubic spline
interpolation procedure is used to compute the local tangents to the filaments
and to insert new elements when needed in order to maintain at all times a good
resolution along the filaments.
Our last example is borrowed from Ref. 179. It concerns the phenomenon of
vortex breakdown in a swirling axial jet. The vortex breakdown comes from the
formation of a bulge that contains a recirculation zone. As the flow develops,
this bubble becomes unstable and its asymmetry results in a wakelike behavior
in the downstream zone. The vortex filament simulation shown in Figure 3.4
74
3. Three-Dimensional Vortex Methods for Inviscid Flows
-2.0
0.0
2.0
4.0
6.0
8.0
Y
t = 0.157031e+02
(c)
Figure 3.3. (Continued)
enables a very sharp description of the tilting of the filaments, which is at the
origin of the breakdown. In this simulation, filaments are laid on three coaxial
sleeves. New elements are created upstream on every filament as soon as the
preceding element has moved downstream more than a prescribed resolution,
which is taken as a fraction of the core radius. The position of the new elements
in the upstream plane is determined so as to ensure the connectivity of the
filaments. A dissipation model is used, which consists of a continuous increase
of the core radius of the elements, in the spirit of the core-spreading method
(see Subsection 5.6.2) and a clipping strategy allows to remove all elements
whose core radius exceed 10 times their initial value.
In conclusion, these calculations show that vortex filament methods are a
useful tool for direct numerical simulations of inviscid flows. By concentrating
3.3. Convergence Results
75
immw
I
12.566
0.000
X
t = 0.3125Q0e + 0Q
(d)
Figure 3.3. (Continued)
on the vortical zone of the flow and allowing refinement at a minimal dissipation cost, they allow to investigate fine structures and the changes in the flow
topology that are characteristic of three-dimensional vortex dynamics.
3.3. Convergence Results
Historically, the first convergence result for vortex methods in three dimensions
has been given by Beale and Majda in one of the very first numerical analysis
work on vortex methods [25]. This analysis is based on a reformulation of
76
3. Three-Dimensional Vortex Methods for Inviscid Flows
12.566
o.ooo
X
t = 0.265625e + 01
(e)
Figure 3.3. {Continued)
the method of Eq. (3.1.5) in terms of the derivatives of the flow map. As a
matter of fact, a comparison of Eq. (3.1.5) with Eq. (1.1.10) shows that vorticity
and material lines follow the same dynamics. Therefore Eq. (3.1.5) can be
equivalently rewritten as
ap = vpup,
u>hp(t) = [DxX(x; t, 0)] [w* (0)],
(3.3.1)
where X denotes the characteristic of the flow and, as usual, vp denotes the
3.3. Convergence Results
11
x
t = 0.157031e + 02
(f)
Figure 3.3. {Continued)
volume of the particles. The numerical method suggested in Ref. 25 is to approximate the values of [DxX(xp; t, 0)] by means of finite differences based
on the pointwise values of the flow map (that is, actual particle locations) corresponding to grid points close to the original particle location xp.
The proof given in Ref. 25 relies heavily on the use of discrete norms associated with the grid made by the particles at their initial locations. The overall
rate of convergence is conditioned both by the order and by the smoothness
of the cutoff, as in two dimensions, and by the order of accuracy of the finitedifference scheme used in the approximation of the derivatives of theflowmap.
Greengard [89] gave a convergence proof of a method in the same spirit, but
using derivatives of the flow map only along the direction parallel to the vorticity. This method is closely related to vortex filament methods, and we postpone
its discussion to the end of this section.
78
3. Three -Dimensional Vortex Methods for Inviscid Flows
t=60.0
Figure 3.4. Vortex filament simulation of the vortex breakdown in a swirling jet
(courtesy of J.-C. Saghbini and A. Ghoniem).
3.3.1. Vortex Particle Methods
The first convergence proof concerning the three-dimensional vortex particle
method as defined by Eqs. (3.1.4) and (3.1.5) is due to Beale [19]. This proof
assumes that the vorticity is smooth and with compact support and that the cutoff
is at least fourth order. A later proof [60] works in more general situations. We
give below the essential steps of a simplified version of this proof [44, 45],
which is merely an extension of the argument developed in Chapter 2.
As for the two-dimensional case, we state the convergence result in the case
of periodic boundary conditions, so that the proof can focus on the key features
of the method. The initialization step is done on the basis of a regularized initial
3.3. Convergence Results
79
vorticity field:
OLpdO) = u£0(xp)h3;
uh0 = ^etpS(x
- xp),
where the initial particles are on a uniform mesh with mesh size h and CVQ =
Ke +p <*>o> where £ is a cutoff function and * p denotes the periodic convolution
(we refer to Appendix A for the notation and the needed mathematical background).
Theorem 3.3.1. Let r > 2 and T > 0. Assume that u;0 e W" l t 0 0 (fi) Pi
W2oo(Q), where Q is a square periodic box, and that C, is a cutofffunction of
order r. Assume further that there exists s > 0 such that h < sl+s; then there
exists a time T(<jj$) such that, ifh is small enough, the following estimate holds
fort G[0,T(wo)]:
\\(u-uh)(.,t)\\LP(Q)<C(T)er.
Observe that the restriction on the time for which the error estimate holds only
reflects the fact that the three-dimensional Euler equations cease to be well
posed past a certain critical time, which depends on the strength of the initial
vorticity [142].
Proceeding as in two dimensions, in order to establish this error estimate we
first focus on the regularization error. We denote by (u e, ue) the solution to the
problem,
+ div(u e a/) - (u£ • V)w£ = 0,
dt
(3.3.2)
w e 0,0) = a;g,
£
(3.3.3)
£
u =K£*pu; ,
(3.3.4)
and we prove estimates similar to relations (2.6.4) and (2.6.5). For a time T(wo)
and t < r(u?o) we first have
\\<S(;t)h,oo<C.
(3.3.5)
If we next set e = u: — UJ£, we obtain, by the same argument as in two dimensions,
l|e(.,0)||_i fl ,<C£ r .
(3.3.6)
80
3. Three-Dimensional Vortex Methods for Inviscid Flows
By subtracting Eq. (3.3.2) from Eq. (3.1.1) we also have
de
— + div(u ee) - (e • V)ue =div[(u e - u)u>] - (w • V)(u - u£).
(3.3.7)
We thus may apply Theorem A.2.7 to relations (3.3.6) and (3.3.7) with
T = T(u0), m = 1, A = 1, a = u e , a0 = [Vue]
to get
||e(-, t)\\.ltP
< C |"||eo||-i,
o||-i,p + / ||(u - ue)(-,
TT |
• V)(u - ue)(-, j)||-i l P djj.
(3.3.8)
But we have
||(w • V)(u - u e )ll-i,
so that we end up with
||e(.,OII-i,p<C e r + / | | ( u - u e ) ( . , s)\\o,pds\.
I
Jo
J
The proof then proceeds as in two dimensions: We write u — u£ = (K — K£) +p
ijo -h K£ +p e, and then we apply Calderon's theorem [estimate (A.3.6)] to obtain
We thus have
l|e(-,OII-i,p < C \er + f
KeH-9s)\\-hpds
and, by Gronwall's theorem,
We now turn to the evaluation of u£ — u h. Wefirstchoose m such that ms > r + 1 .
Let us show that
-m).
(3.3.9)
3.3. Convergence Results
81
It results from relations (3.3.4), (3.3.5), and (A.3.7) that we canfinda constant
C* depending only on UJQ such that, for t < T(U>Q),
I|U£(., 0ll2,oo +
A:=3
We then introduce the time 7^* <
T(WQ),
defined as
7)* = max o < t < r(w 0 ); llu*o, 0112,00 + X**~ V ( - , 0U,oo < 2C*
As in two dimensions, we split the error into two terms: u e — u^ = ah + (3h,
where
dt
+ div(uhah) - ((xh - V)uh = 0,
ah(-, 0) = u£0 - uh0,
(3.3.10)
and
h l
0 ) - (f3h - V)uh
-u£)(jj£]-
(u>£ -V)(uh - u e ) ,
^(-,0) =0.
(3.3.11)
The only difference with the two-dimensional case, besides the zero-order term
in the advection equations on the left-hand sides above, is the additional term,
which is due to the stretching, on the right-hand side of Eq. (3.3.11). This term,
however, can easily be handled in our functional framework. By definition of
the space W~l'p(Q),
\\(u>£ • V)(u* - u e ) | | _ l i P < Ic^li.ooIKu*
-us)\\o,P.
We then apply Theorem A.2.7 with m = 1 to bound OLH and with arbitrary m to
bound /3h. This yields exactly the same estimates as for the corresponding error
terms in two dimensions. Wefinallyrecover that T* = T(u>o) by differentiating
u — Ug (note that one can obtain a slightly better control of the derivatives of
u, in particular a uniform bound on the second derivatives, because, on the
one hand we required the initial vorticity field to be more smooth than in two
dimensions, and, on the other hand, we chose a bigger value of m).
In closing let us mention that partial convergence results exist concerning
the three-dimensional point-vortex method, that is, when no mollification is
used for the velocity calculations. In Ref. 108 the method analyzed uses a
82
3. Three-Dimensional Vortex Methods for Inviscid Flows
finite-difference-based stretching evaluation, as in Ref. 25. The totally gridfree method is studied in Ref. 65 (note, however, that this reference contains a
flaw in the consistency proof, and the convergence of the grid-free point-vortex
method remains an open problem).
33.2. Vortex Filament Methods
Vortex filament methods are, like vortex particle methods, based on explicit
weak solutions to the vorticity equation. The structure of the convergence proof
will thus remain the same as that in Subsection 3.3.1 and one needs to focus on
only the initialization error. To analyze this error in weak norms, we consider
a test function 0; in view of Eq. (3.2.1) and Definition 3.2.1, we have
t
P
(3.3.12)
In order to be brought back to a situation in which we can use optimal quadrature
estimates, following Ref. 89, let us assume that the initial vortex lines can
be smoothly mapped to parallel circles, in the following sense: there exists
a smooth, one-to-one mapping S from [0, I] 2 x [0, l]p onto the support of
u?o (where the index p above means that the opposite sides [0, 1] x {0} and
[0, 1] x {1} are identified by periodicity) and a smooth scalar function X defined
on [0, I] 2 such that
wo[H(y, s)] = M y ) ^ ( y , s).
(3.3.13)
OS
With these definitions it is clear that the vortex lines associated with LJ0 are the
curves
Let us now observe that, for u>o to be divergence free, the Jacobian determinant
of the transform S has to be independent of s. Indeed we must have, for all
scalar function \//,
Using the change of variables S together with Eq. (3.3.13) yields
[2(y, j)]|det[D y ,,S(y, s)]\dyds = 0,
3.3. Convergence Results
83
or, equivalently,
a
k(y) — }/f[E(y,s)]\det[Dy tSE(y9s)]\dyds = O.
OS
After integration by parts with respect to the s variable, we obtain
a
(y, s)]—-|det[D y,,S(y, s)]\dyds = 0.
OS
Since this must be true for all function \/r, the s derivative of the Jacobian
determinant must vanish and our claim is proved.
We can now set
(3.3.14)
M (y) = A.(y)|det[DyiJS(y, s)]\
and we are ready to define our initialization. We select a regular array of vortex
lines,
jCp '.
s —> H(p/z, s) ; p = (p\, P2) £ Z ,
and we assign them a circulation equal to fih2:
Let us now come back to Eq. (3.3.12). We compute the integral on the righthand side with the change of variables S and use Eqs. (3.3.13) and (3.3.14) to
obtain
/
ds.
/
This clearly shows that the initialization error amounts to a quadrature error
with respect to the variable y (that is, in the local coordinates given by S,
the direction transverse to filaments), whereas integration with respect to the
filament direction variable s is performed exactly.
If u?o is smooth enough we thus have (Lemma A. 1.2)
\\ll-^(;S)cj)[S(;S)]\\mAds
<Ch'"U\\mA.
84
3. Three-Dimensional Vortex Methods for Inviscid Flows
The convergence analysis can now proceed along the same lines as in Subsection 3.3.1 and yields, for a finite time only, depending on the initial condition,
provided the cutoff is of order r and the overlapping condition h <^ s is satisfied.
If the initial vorticity field is not smooth, the construction of a filament method
based on a regularized initial vorticity field is more questionable than that for
vortex particles, as it would require use of filament locations adapted to these
vorticity fields. Note finally that, in view of the remark made in Section 3.2
concerning the analogy of filament method with the two-dimensional contour
dynamics method, the above argument also shows the convergence of these
methods.
3.4. The Problem of the Vorticity Divergence
for Vortex Particle Methods
As we already said, the difficulty of vortex particle methods to reproduce a
divergence-free vorticity field has its origin in the initialization stage of the
method itself. However, one may advocate that, since the approximation of
functions by particles is a consistent operation, this divergence can be made
small enough by using a sufficient number of points. The issue is then to analyze
to what extent a divergence in the initial field, however small it is, is amplified
by the convection and stretching in the flow.
Let us first focus on the original particle scheme of Eq. (3.1.5) and show
that this method actually performs rather well, at least in the early stages of the
evolution of the particles. We first recall that the particle circulations resulting
from this scheme satisfy
uhp(t) = [DxXh(x;t,0)][u>hp(0)].
(3.4.1)
As a result, if the vorticity at a given particle initially points toward a neighbor,
then, to the leading order, this property will be preserved for all time. In other
words, the connectivity of vortex lines is maintained by the method, at least as
long as the stretching does not force too many particles apart from each other.
Another way to understand this feature is to observe that, since the method is
based on an explicit (weak) solution to the vorticity equation,
— + divOi* : (J 1) - (uh • V)u* = 0.
dt
(3.4.2)
3.4. Vorticity Divergence for Vortex Particle Methods
85
Straightforward differentiations yield
9 (diva/)
(3.4.3)
dt
This means that the scheme does not further amplify the violation of the
divergence-free constraint on the vorticity. It will not seriously disrupt vortex
lines if they are connected at time zero.
The transpose scheme of Eq. (3.1.7), although conservative, unfortunately
does not share this property, which may explain why, at least in some cases,
it does not perform as well as the original scheme. As for the other conservative scheme, Eq. (3.1.9), that we presented in Section 3.1, it is based on the
conservative form of the Euler equation. By differentiation this gives
— (diva/) = 0 ,
dt
which is even better than Eq. (3.4.3).
Let us now review a few tools that can be used to improve vortex particle
schemes further from the point of view of the vorticity divergence.
3.4.1. Helmholtz Decomposition
The first class of methods consists of projecting the vorticity field onto a
divergence-free field, through a Helmholtz decomposition. As any vector field,
the vorticity field can be split into a gradient and a rotational part:
UJ = grad JZ + curl </>.
(3.4.4)
A divergence-free vorticity field is recovered by subtracting the gradient part
of (jj. This is actually equivalent to using a Lagrange multiplier in the vorticity
equation to enforce the divergence-free constraint on the vorticity (similar to the
pressure in the velocity-pressure formulation) and to use a transport-projection
algorithm.
The "pressure"-like term n is obtained by taking the divergence of Eq. (3.4.4).
Assume that we are dealing with a grid-free vortex particle method without solid
boundaries and that UJ vanishes at infinity. It is then natural to write n as
7i — —G
E
*div a;,
where, as usually, G£ is a regularized version of G. The corrected particle
vorticity is therefore
J = v + VGe * div a;.
(3.4.5)
86
3. Three-Dimensional Vortex Methods for Inviscid Flows
Another possibility is to compute </> by taking the curl of Eq. (3.4.4). This leads
to a vorticity field
J2 = V x [V x (Ge •<*;)].
(3.4.6)
One may observe that the second formula also can be written as
J2 = V x u £ ,
(3.4.7)
where ue is the regularized velocity field, a formula due to Novikov.
It is important to note that Eqs. (3.4.5) and (3.4.6) do not give the same fields:
if div LJ = 0, the fields UJ\ and CJ coincide, whereas o/2 and u differ. Formula
(3.4.6) actually induces a dissipation resulting from the smoothing involved
in the reconstruction of the vorticity. On the other hand, it is readily seen that
formula (3.4.5) does not guarantee that u'2, unlike <JX, is divergence free. This
difficulty, related to the coexistence of particles and regularized fields in vortex
methods, is very similar to the ones encountered in remeshing or assignment
techniques (See Chapter 7 and Section 8.1). A possible way to overcome it is
to process the weights of the particles before applying formula (3.4.5).
More precisely, if the vorticity UJ is given by particles with circulations a,
one has to find weights j3 such that, denoting by *j the discrete convolution on
the particle locations,
P*d$s = VG e *j divu;
on all particles, then add f3 to a, according to Eq. (3.4.5). Solution procedures to
solve this linear system are analyzed in Refs. 200 and 201. A natural approach,
similar to Beale's method described in Section 7.1 [formula (7.1.3)], leads to
an iterative procedure. However, it was found that this procedure becomes ill
conditioned as the overlapping of the particles increases, which may be seen
as a consequence of the fact that the linear system gets closer to an ill-posed
deconvolution problem. The convergence of the iterations is also affected by
the lack of smoothness of the vorticity, which is another difficulty, as threedimensional flows, unlike their two-dimensional counterparts, tend to develop
singularities spontaneously.
If this linear system is solved just after the time particles are remeshed on
regular locations, one may consider inverting once for all the matrix obtained for
these locations. We refer to Ref. 201 for a discussion of these various strategies.
As a numerical illustration of this relaxation procedure, we use the following
example from Ref. 199. The initial configuration for this simulation consists of
two vortex rings crossing each other. Although not physical, this is an enlightening test problem as each filament of a given ring gets wrapped around the other
ring. In Figure 3.5 we follow the particles lying on one filament in each ring,
3.4. Vorticity Divergence for Vortex Particle Methods
87
Figure 3.5. Evolution of two filaments with the original scheme.
with the unmodified scheme of Eq. (3.1.5). We observe that, for early times, the
filament topology is well preserved. Figure 3.6 shows the same sequence, but
with the following remeshing procedure: When particles go too far apart from
each other, new particles are inserted, with circulations assigned according to
Eq. (3.4.5), that is,
grad{a°ld • grad[Gs(xp - x,)]}.
(3.4.8)
The improvement, at least until time 4.0, is clear. This is confirmed by the
behavior of the diagnostics for linear and angular impulses, which are better
conserved in the remeshed calculations (see Ref. 199 for details and further
discussions).
3. Three-Dimensional Vortex Methods for Inviscid Flows
Figure 3.6. Evolution of two filaments with remeshing and relaxation scheme of
Eq. (3.4.8).
3.4.2. Dissipation Techniques
The first technique we describe has been introduced in the field of Maxwell
equations. In this context the preservation of a divergence-free magnetic field
is crucial to ensure the conservation of charge. The relevant idea is then to
dissipate the vorticity divergence by modifying the vorticity equation into
+ div(u \ uS) — {UJ - V)u = a grad (div a;).
Taking the divergence of this equation indeed yields
3 (div
dt
+ (u • V)(div CJ) = aA(div a;).
(3.4.9)
3.4. Vorticity Divergence for Vortex Particle Methods
89
In particular,
which confirms that this equation does dissipate vorticity divergence. One also
deduces from Eq. (3.4.9) that
This shows that the algorithm is globally dissipative. In a Navier-Stokes scheme,
with molecular viscosity v, for this dissipation to be negligible compared with
the molecular one, one has to make sure that
||divu;||§ t 2 «||Va;||§ t 2 .
The implementation of Eq. (3.4.9) in a vortex method can be done through a
particle strength exchange scheme (see Subsection 5.4.4).
In closing, let us mention that another point of view on the divergence problem
in vortex particle methods may be to consider that the divergence of the vorticity
is only one particular manifestation of unphysical small scales produced in the
course of the computations. If one adopts this point of view, it is natural to rely
on turbulent viscosity models as natural tools to address this issue. We again
refer to Chapter 5 on diffusion schemes, and more specifically to Section 5.6
for a discussion of turbulent viscosity models in vortex methods. Experience
also shows that plain regridding strategies, when used with smooth, high-order
interpolation functions (e.g., the M'A scheme see Section 7.2), provide subgrid
dissipation, of the hyperviscosity type, which essentially remedies the problem
with the divergence.
Inviscid Boundary Conditions
Vortex methods were initially conceived as a tool to simulate the inviscid dynamics of vortical flows. The vorticity carried by the fluid elements is conserved in inviscid flows and simulating the flow amounts to the computation
of the velocity field. In bounded domains the velocity field is constrained by
the conditions imposed by the type and the motions of the boundaries. For an
inviscid flow, it is not possible to enforce boundary conditions for all three
velocity components as we have lost the highest-order viscous term from the
set of governing Navier-Stokes equations. Usually for inviscid flows past solid
bodies we impose conditions on the velocity component locally normal to the
boundary.
The description of an inviscid flow can be facilitated when the velocity field
is decomposed into two components that have a kinematic significance. In this
decomposition, a rotational component accounts for the velocity field due to the
vorticity in the flow whereas a potential component is used in order to enforce
the boundary conditions and to ensure the compatibility of the velocity and the
vorticity field in the presence of boundaries. This is the well-known Helmholtz
decomposition.
Alternatively the evolution of the inviscid flow can be described in terms
of an extended vorticity field. The enforcement of a boundary condition for
the velocity components normal to the boundary does not constrain the wallparallel velocity components. This allows for velocity discontinuities across
the interface that may be viewed as velocity gradients over an infinitesimal
region across the boundary. In turn, this tangential velocity discontinuity can
be equivalently described by a vortex sheet distribution. The strength of this
vortex sheet is adjusted so as to enforce the boundary conditions at the interface. In the same context angular motions of solid bodies in the flow may be
90
4. Inviscid Boundary Conditions
91
equivalently described in terms of volume distribution of vorticity at the interior of the body. This allows for a complete description of the flow field in
terms of an extended vorticity field. A compatibility condition between the
components of the extended vorticity field is necessary in order to ensure
the conservation of flow invariants while enforcing the kinematic boundary
conditions.
From the engineering perspective the model of inviscid flow has been implemented for several decades, as an approximation of high Reynolds number nonseparated flows past surfaces such as ship hulls and airfoils. Hess in
1975 pioneered the computation of potential flows past airplane hulls by using
boundary element techniques to discretize the governing integral equations,
leading to the well-known panel methods. In order to calculate more realistic
airloads, the next level of engineering approximation considers the inviscid evolution of the vorticity field generated by the aerodynamic configurations. This
approximation has to account for the proper generation and shedding of the
vorticity from the surface of the body into the wake. In steady lifting flows this
mechanism is expressed in terms of the Kutta condition. In unsteady incompressible flows various engineering approximations have been used in order
to a priori define the location and the injection rate of vorticity in the flow
from the surface of the body. These shedding models provide a mechanism of
relating the kinematic and the dynamic constituents of the flow and are well
suited to the description of the flow in terms of an extended vorticity field.
The problem of vorticity generation in a viscous flow is further addressed in
Chapter 6.
In Section 4.1 we describe the Helmholtz decomposition of the velocity field
and we consider the solution of Laplace's equation along with the kinematic
boundary conditions. Our emphasis is on the integral solutions of the equations
and their discretization by use of boundary element methods. In Section 4.2
we describe the alternative technique of enforcing the kinematic boundary conditions by means of an extended vorticity field. We introduce the concept of
the surface vortex sheet and we present Poincare's identity relating the values
of the velocity field with its values at the boundary. We analyze the resulting
integral equations and discuss their numerical approximation by using panel
methods. Furthermore we emphasize the properties of these integral equations
that allow us eventually to link the inviscid and the viscous descriptions of the
flow field. In Section 4.3 we discuss the Kutta condition and vortex shedding
mechanisms used in engineering approximations. In Section 4.4 we discuss the
difficulties of smooth vortex methods associated with the modification of the
vorticity integrals in the presence of boundaries in inviscid flows.
92
4. Inviscid Boundary Conditions
4.1. Kinematic Boundary Conditions
In the following sections we focus on the enforcement of the kinematic boundary conditions for flows around an impermeable solid body. Note that the results
presented herein can be readily extended to flows with other boundary conditions, such as free-surface flows [15, 141].
We consider an impermeable solid body immersed in an incompressible fluid
extending to infinity and we denote by ub(t) the unsteady velocity of translation
and by Qb(t) the unsteady rotational velocity of the body. The body surface may
be viewed as an interface separating two volumes. We denote by Vt the volume
interior to the fluid flow domain (exterior to the body) and by Ve the volume
exterior to the fluid domain (and interior to the body). In the following sections
the subscripts / and e refer to quantities in these domains. We distinguish both
sides of the surface S as 5/ (related to the volume V;) and Se (related to the
volume Ve) and a unit vector n uniquely defined at every point of S and in the
direction from Se toward 5/.
4.2. Kinematics I: The Helmholtz Decomposition
In the Helmholtz decomposition the velocity field is decomposed into a rotational component and a solenoidal component as
u = u^, + U0,
(4.2.1)
where u w accounts for the vortical part of the flow, and it is such that
w
= V x u = Vxuw.
(4.2.2)
Moreover, we can impose the additional constraint of incompressibility on u w :
V•
Uu;
= 0.
(4.2.3)
Combining Eqs. (4.2.2) and (4.2.3), we obtain a vector Poisson equation for the
velocity u^ in terms of the vorticity of the flow field:
Auw = - V x w .
(4.2.4)
A solution to this equation for example is given by the Biot-Savart law,
Uu, = / K(x - y ) w ( y ) d y ,
JVi
where K(x) is the Biot-Savart kernel.
(4.2.5)
42. Kinematics I: The Helmholtz Decomposition
93
Having assigned the rotational part of the flow to the u w velocity component
we have that
Vxu^O.
(4.2.6)
The second velocity component may now be equivalently described in terms of
a potential as
u 0 = V4>.
(4.2.7)
The condition of incompressibility (V • u^ = 0) results in Laplace's equation
for the potential:
Ad> = 0.
(4.2.8)
Clearly the decomposition Eq. (4.2.1) is not unique as any potential flow field
may be added to it. We obtain a unique solution by enforcing the kinematic
boundary conditions of the flow. For the potential flow past an impermeable
solid body translating with a velocity u^, Eq. (4.2.8) is supplemented with the
boundary conditions
u n = (iio, + V<f>) n = ii£ n,
(4.2.9)
or, equivalently,
VO • n = (ub - u w ) • n.
(4.2.10)
Hence the velocity field of the flow can be expressed as
u =
/ K(x -y)u>(y)dy
+ V4>,
(4.2.11)
where O satisfies Laplace's equation and the boundary condition (4.2.10).
4.2.1. Laplace's Equation for Hydrodynamics
Laplace's equation is the fundamental equation in potential theory with applications ranging from electrodynamics to hydrodynamics.
Numerical solutions of Laplace's equation can be classified into two broad
categories. Grid-based methods (e.g., finite differences, finite elements) rely on
a discretization of the Laplacian operator over the whole domain, which results
in a linear system of equations for the unknown values of the potential. For
simple geometries the matrices involved are banded and the equation can be
94
4. Inviscid Boundary Conditions
solved easily with a number of matrix inversion techniques. On the other hand,
this requires the discretization of the entire domain. Moreover, for complex
geometries the resulting linear system of equations does not always have a
simple structure, and special inversion techniques are necessary in order to
get efficient computations. This is a subject of ongoing research efforts, and
efficient numerical schemes, such as multigrid, can be devised that reduce the
computational cost.
Alternatively, the solution of Laplace's equation can be obtained by means of
the equivalent Green's function formulation. Enforcing the boundary conditions
results in a set of integral equations for the unknown distribution of discontinuities (singularities) of the potential and/or its derivatives at the boundary of
the domain. These integral equations can then be discretized by use of various
quadrature techniques, resulting in a set of algebraic equations for the unknown
singularity strengths at the boundary. Complex geometries are relatively easy
to handle as only the boundary of the domain needs to be discretized.
Integral equation techniques reduce by an order of magnitude the dimensionality of the problem by requiring the solution for the unknown values of
potential discontinuities at only the boundary of the domain. Unlike the case of
grid-based methods, the matrices here are dense, even for simple geometries.
However, it is possible to construct fast inversion techniques that render the
computational cost proportional to the number of boundary elements, leading
to an optimal technique for the numerical solution of Laplace's and Poisson's
equations.
A number of integral solutions to Laplace's equation for various geometries
can be obtained by taking advantage of the linearity of the equation. In general,
these solutions can be itemized as follows:
• Linear superposition of elementary solutions. This technique is based on the
observation that the velocity vectors do not cross the flow streamlines. Hence
a linear superposition of elementary solutions of Laplace's equation (such
as sources/sinks) that produce streamlines that coincide with a body surface
provides the solution for the potential flow problem around this body. This
technique has been used extensively in the past for the potential flow solution
about axisymetric bodies (e.g., Rankine's ovoid).
• The method of images. In this method, in order to enforce boundary conditions, we consider an odd or even extension (image) of the infinite-domain
Green's function across the boundary. A simple example is the flow induced
by a vortex over a flat surface, which can be equivalently described by the
system of a dipole, whose axis coincides with the boundary of the domain.
For two-dimensional geometries this technique can be extended to more complicated geometries by use of the conformal mapping technique.
4.2. Kinematics I: The Helmholtz Decomposition
95
• The method of singularity distributions. This is the most general technique
for the integral solution of Laplace's equation. In fact the first two techniques
may be viewed as its particular cases. The solution of Laplace's equation
is expressed in terms of a continuous superposition of its Green's functions
with weighting factors (strength), the discontinuities of the potential, and
its derivatives at the boundary of the domain. The weighting factors are
determined from the solution of a linear system of equations so as to enforce
the no-through-flow boundary conditions.
The method of singularity distributions is based on the Poincare identity that
relates the value of a scalar field <£> to its discontinuities at the boundary of the
domain. For the potential of an incompressible flow (AO = 0) the Poincare
identity gives
<D(x) =
r
/ [n(x') • V(<D/ - <J>g)(x') G(x -
Js
x f)
-(<*>,• - <J>e)(x') n(x') • V G(x - x')] dS(x'),
(4.2.12)
where the integrals associated with the value of the potential at infinity are zero
and
{
4- . _j; ,.
in three dimensions
*]x
.
(4.2.13)
— 2^1og(|x — x'|) in two dimensions
The discontinuities involved in the above boundary integral equations are called
single- and double-layer potentials. We define the double-layer potential /x (or
doublet) as
H = ®e- (*>,
(4.2.14)
and the single-layer potential a (or source) as
a = —
-.
(4.2.15)
In order to enforce the boundary condition of no-through flow we have to
evaluate the wall normal derivative of the potential (3<£/3n) at the boundary
of the domain. This can be calculated by means of a limiting process with
Eq. (4.2.12), resulting in
-/x(x;)n-VG(x, -x'b)]dS(xfb)
(4.2.16)
96
4. Inviscid Boundary Conditions
The -f sign is used when we approach the interface from the side Se, and the
— sign is used when we approach the interface from the side Si.
Enforcing the no-through-flow boundary conditions results in a system of
integral equations for the unknown singularity strengths at the boundary of
the domain. For example, requiring that the potential be continuous across the
interface implies that // = 0, resulting in an integral equation for the source
distribution on the surface of the body:
(u* - u j • n(xb) = -X-o(xb)
+ [ cr(x'b)G(xb - xb)dS(xfb).
(4.2.17)
The integrals in the above equations can be calculated numerically with a
quadrature, resulting in a set of algebraic equations for the unknown strength of
the singularity distribution. Usually this is achieved in terms of the well-known
panel methods that are further discussed in Section 4.3.
4.3. Kinematics II: The SP-u> and the u-u; Formulations
The kinematic boundary conditions can be enforced without considering a decomposition into a potential and a vortical component for the velocity field of
the domain. Instead, we consider an extended vorticity field that consists of the
vorticity field in the fluid, a vortex sheet distribution on the boundary, and a
uniform vorticity distribution inside the body corresponding to the solid-body
rotation (see Fig. 4.1).
The velocity and the extended vorticity of the flow field can be described
with the aid of a single vector streamfunction \P such that u = V x \P. In
two dimensions the no-through-flow boundary conditions can be expressed
in terms of the streamfunction, and the whole problem reduces to the solution
of a Poisson equation. This method is applicable in three dimensions as well,
but the cross coupling of the streamfunction components resulting from the
kinematic boundary conditions makes the method less easy to implement for
complex geometries.
The use of the streamfunction canfinallybe bypassed by direct consideration
of the relationship between the velocity and the extended vorticity field of
the flow by means of the Poincare identity. In this formulation the kinematic
boundary conditions can be enforced by an adjustment of the strength of the
vortex sheet distribution on the surface of the body.
4.3. Kinematics II: The \P-QJ and the VL-UJ Formulations
97
4.3.1. The Extended Vorticity Field
Applying the condition of no-through flow results in aflowvelocity whose tangential component at the body surface is in general different from the tangential
velocity component in the interior of the body. This velocity difference across
the interface may be viewed as an infinitesimally thin vorticity distribution
(vortex sheet) along the surface of the body, defined as
7(x) = n(x) x [u(X/) - u(x,)].
(4.3.1)
The physical character of the surface vortex sheet has been discussed already
in Chapter 2, but it can be further elucidated through the following limiting process. We may consider the surfaces Se and Si as separated by a small distance e.
We suppose now that a vortex u)1 is continuously distributed between Se and St
and is continuously normal to the local vector n. This vortex induces velocities
ue and ii/ on the surfaces Se and 5/, respectively. In the limit of s -> 0 the quantity 8UJ1 has a finite limit that we denote by 7, defined as a vortex sheet. Using
Kelvin's theorem on a loop around the surfaces 5/ and Se, we can easily show that
7(x) x n(x) = u(x/) - u(Xe).
(4.3.2)
This vortex sheet is used to enforce the no-through-flow boundary conditions
and at the same time corresponds to the fluid velocity on the boundary.
In a similar spirit, a solid-body rotation can be equivalently described in terms
of a uniform vorticity field distributed in the interior of the body. The vorticity exterior to the body, the surface vortex sheet, and the solid-body rotation
Vortex Sheet
Vattdcity in tire Ivlow
Figure 4.1. Definition of an extended vorticity field for flow past a translating and
rotating cylinder.
98
4. Inviscid Boundary Conditions
constitute an extended vorticity field (Figure 4.1). We denote by uw the velocity
field induced by the vorticity of the flow and the solid-body rotation and by u 7
the velocity field induced by the surface vortex sheet.
Hence the velocity field throughout the domain can be represented as
u = uw + 117 + Uoo,
(4.3.3)
where u ^ denotes the velocity at infinity. For simplicity in this section we
define
Uext = UW+UOO.
(4.3.4)
The velocity and the vorticity field of each constituent are related by a Poisson
equation with the form
Aua = V xua,
(4.3.5)
where the index a can take the values u> and 7. Solving Poisson's equation for
each constituent of the extended vorticity field, we obtain that
uw = Vx /
JVeUVi
w(x')G(x - x')dV(x'),
(4.3.6)
r
f
f
u7 = V x / 7(x )G(x - x )dS(x ),
Js
where G(x — x') is given in Eq. (4.2.13). The strength of the vortex sheet must
be adjusted so that the total velocity field of the flow satisfies the no-throughflow boundary condition.
4.3.2. The Streamfunction Formulation
For an incompressible velocity field u we define the vector streamfunction \P\
u = V x 9.
(4.3.7)
As in the case of the velocity field, we can associate a streamfunction for
each constituent of the extended vorticity field. From Eqs. (4.3.7) and (4.3.6)
we obtain
&„= [
CJ(X')
JVeUVi
G(x - x') dV(xr),
# 7 = / 7(x') G(x - x') rfS(x').
JS
(4.3.8)
We define also as ^
the streamfunction corresponding to the velocity field at
4.3. Kinematics II: The &-LO and the u-u; Formulations
99
infinity, and for simplicity we define
*rext = * r W +^oo.
(4.3.9)
The vorticity field and the streamfunction are related as
cj = V x u = V x V x # r
(4.3.10)
2
= V(V- #) - V <F.
(4.3.11)
By requesting that the vector streamfunction be solenoidal (V \P = 0), we
obtain a Poisson equation for the streamfunction and the vorticity field:
V 2 # = -LJ.
(4.3.12)
Applying the Poincare identity to each component of the streamfunction
yields
= *ext + /
"
~ OO G(X - Xf)
Js
9n
- (!Pi- - &e)(x') —9G
( x - xVS(x').
(4.3.13)
The above equation can be expressed in terms of singularity distributions on
the boundary of the domain. We define the source distribution a as
a = &t -&e
(4.3.14)
and the vortex sheet 7 as
7 = —
dn
so that Eq. (4.3.13) can be expressed as
c r
/ H(xf)G(x
- x') -
-,
3n
CT(X')
(4.3.15)
DC
1
— (x - x ' ) dS(xf).
(4.3.16)
Note that the definition of the source distribution is consistent with the physical
concept of defining the numerical difference in \P between two streamlines as
the volumeflowrate between the streamlines. Similarly the vortex sheet can be
viewed as a velocity gradient across the interface.
100
4. Inviscid Boundary Conditions
For two-dimensional and axisymmetric flows, there is only one nonzero
vorticity and streamfunction component, and the kinematic boundary conditions
can be easily expressed in terms of the streamfunction. For example, requesting
that the wall normal velocity at the surface of a stationary body be zero is
equivalent to requesting that
avi/
— = 0 or ty = V e = 0
(4.3.17)
9s
on the surface of the body.
In this case, by considering the limiting form of the expressions in Eq. (4.3.16)
and imposing the constraint that the streamfunction be continuous across the
interface, we obtain an integral equation for the unknown strength of the vortex
sheet that in two dimensions is given by
- 1 - / x(x') log |x - x'| dx1 = vl/ext,
2TT JS
(4.3.18)
where vj/ext is the streamfunction that accounts for the vorticity field and the
free stream on the exterior of the body.
In three dimensions this component-by-component analysis is not always
possible as the kinematic boundary conditions involve a cross coupling of the
various components of the streamfunction at the boundary [u n = (V x \P) • n].
However, for simple geometries such asflatwalls, suitable boundary conditions
can be derived.
4.3.3. The Vorticity-Velocity Formulation
The kinematic boundary conditions can be enforced by direct exploitation of the
relationship between the velocity and the extended vorticity field of the flow.
This method is directly applicable to two- and three-dimensional flows and
allows for a more physical description of the kinematic and viscous boundary
conditions as they are related to the extended vorticity field.
The basis of the method is the following theorem, which describes the vector
Poincare identity for the velocity field u (with V • u = 0) of the flow:
u(x) = Uext + V x / [n x (ue - u / )](x / )G(x - x') dS(xf)
Js
V<J / [n • (u, - u i )](x / )G(x - x') dS(xf) J>,
where Uext =
(4.3.19)
(4.3.20)
43. Kinematics II: The \P-UJ and the U-LJ Formulations
101
If we require that the normal velocity component be continuous across the
interface (n • ue = n • U;) we obtain that
Uext + V [ y(xf) G(x - x')dS(x') = u(x).
(4.3.21)
Js
In order to enforce the boundary conditions we obtain first the limiting expressions of Eq. (4.3.21) for points on the surface of the body.
u(x0) = ±±y
H — + / y(x') x VG(x - x f)dS(xf)
^
Jss
= -^+J y«
(4.3.22)
where the + or the — sign appears when we approach the surface from the
inside or the outside, respectively, of the flow domain.
The strength of the surface vortex sheet is of course unknown, and it would
need to be determined by the kinematic boundary condition (n ue = n u,).
4.3.4. Boundary Integral Equations
We determine the strength of the vortex sheet by enforcing the kinematic boundary conditions. When we require that the wall normal velocity component be
continuous across the interface the boundary condition of no-through flow can
be imposed in terms of a Fredholm integral equation of the first or the second
kind. Fredholm integral equations of the first kind, when discretized, usually
lead to ill-conditioned systems of equations. We can obtain a well-conditioned
system of equations by formulating the problem as a Fredholm integral equation
of the second kind.
• We can obtain a Fredholm integral equation of the first kind for the unknown
strength of the vortex sheet by enforcing that u • n = u^ • n on the exterior of
the body:
(Uext - ub) n = / 7(x') x VG(x - x') • n(x) dS(xf).
Js
(4.3.23)
• The boundary condition of no-through flow can be expressed alternatively in
terms of the tangential velocity component in the interior of the body, leading
to a Fredholm integral equation of the second kind [121]
xn
t(x)
is
x VG(x - x') • t(x) dS(x').
(4.3.24)
102
4. Inviscid Boundary Conditions
However, Eq. (4.3.24) does not admit a unique solution in the case of multiply connected domains (e.g., any finite two-dimensional body, a torus in three
dimensions, etc.). In order to obtain a unique solution and a well-conditioned
system of equations, m — 1 constraints need be imposed (where m is the multiplicity of the domain). We may obtain such conditions by enforcing Kelvin's
theorem along any curve that renders the domain simply connected. In engineering applications such an extra constraint is provided from the Kutta condition
(see Subsection 4.4.6).
Both constraints may be viewed as compatibility conditions between the
kinematic and the dynamic descriptions of the flow field. As Eq. (4.3.24) is
often used in order to enforce the kinematic boundary conditions, we further
discuss its uniqueness properties in the following sections.
4.3.5. Solution Uniqueness for Two-Dimensional Flows
In this subsection we are concerned with solid, nondeformable, impermeable
boundaries of a body translating with velocity ub(t) and rotating with angular
velocity Qb(t) around its center of mass xb in an incompressible flow. The
surface of the body is denoted by S and its area by Ab, and we use the convention
that n points outward from the body s is the direction of integration along the
surface.
As discussed above, by enforcing the boundary condition of no-through flow,
we can now write a boundary integral equation for the unknown strength of the
scalar vortex sheet as
1 f
.
/ yOO n ' V log|x — x'| dx' = [(Uext — Ufc) • S
(4.3.25)
2TT JS
Equation (4.3.25) is a Fredholm integral equation of the second kind, the solution of which determines the strength (y) of the free-surface vortex sheet when
the right-hand side is given.
By setting
1
r)
G(x, x') = - — [log |x(5) TT an
x(x')|], h = -2[(u ext - nb) • s],-,
(4.3.26)
we may express Eq. (4.3.25) equivalently as
y(x) - I Q(x, x') y(xf) dx' = h(x).
(4.3.27)
Equation (4.3.27) is an integral equation of the second kind with a nontrivial
homogeneous solution. According to the Fredholm alternative, a solution to
4.3. Kinematics II: The \P-u: and the u-u? Formulations
103
Eq. (4.3.27) exists if
(x')£(x')</x' = 0,
(4.3.28)
where § is the solution of the eigenvalue problem for the adjoint equation with
X = l,i.e.,
/ g(x', x) £(x') dx! = A£(x).
Js
(4.3.29)
For the kernel <2(x, xr) considered, p(x) = const, is the solution for X = 1 so
the necessary condition is
h(x!)dx! = 0.
(4.3.30)
This is indeed the case as the above condition is equivalent to
/(unext
e • S)/dx = 0.
Js
Js
(4.3.31)
The solution of Eq. (4.3.27) is not unique because, if / 0 (x) is a solution, then
an arbitrary number of solutions y (x) of the form
y(x) = yo(x)+ap(x)
(4.3.32)
may be obtained, where a is an arbitrary constant and p(x) is the solution of
the following eigenvalue problem for A = 1:
/ Q(x, xf) p(x') dx! = Xp(x).
Js
(4.3.33)
We can obtain a unique solution by imposing one more additional constraint
on the strength of the surface vortex sheet. This can be achieved by use of the momentum equation for the velocity field on both sides of the interface to obtain an
evolution equation for the strength of the vortex sheet. It can be shown then that
d f
-ar j/ y(x,t)dx
d£ Jss
dVn
= - — at
^,
dt
(4.3.34)
where
=
/ Q(xb)dxb.
Jve
(4.3.35)
104
4. Inviscid Boundary Conditions
It is in the sense of Eq. (4.3.34) that the total vorticity is conserved in an
inviscid flow.
Note that if there are multiple bodies present in theflow,the above condition
needs to be satisfied for each individual body. For such geometries the kernel
<2(x, x') admits multiple eigenfunctions p. In particular, for a domain with
multiplicity m one needs to supply m — 1 constraints for the strength of the
vortex sheet. In calculations in which the vorticity is allowed to enter from
the body into the fluid (simulating or modeling viscous effects) care must be
exercised so that the vorticity field generated by each individual body is properly
tracked.
Hence uniqueness for the strength of the vortex sheet can be enforced, or,
equivalently, a is uniquely determined by
a = -TQ + Jy":~-[f.
(4.3.36)
js p(x)dx
Summarizing, we find that the governing set of equations is given by
1
C
r)
y(x) - - / —(log |x - x'|) y(x') dx
n Js dn
r
= -2u e x t • s,
(4.3.37)
^ [ y(x,t)dx = - ^ .
(4.3.38)
at Js
at
These sets of equations may be solved using a panel method. Discretizing the
body with M vortex panels results in a system of equations for the M unknown
strengths, which may be expressed in matrix form:
Qf = h.
(4.3.39)
This system has M + 1 equations but with only M unknowns, the strengths of
the panels. In order to solve this latter system of equations, several approaches
are plausible: least-squares solution, introduction of a new unknown, elimination of one equation, etc. However, these approaches rely mainly on empirical
criteria. An alternative way for the application of the inviscid boundary condition [121] is based on the spectral decomposition of the kernel Q(x, x'). This
kernel may be decomposed as
oo
Q(x, x') = ^
A.iA-(x)£/(x'),
(4.3.40)
where A.; and p/ (x) are eigenvalues and eigenfunctions, respectively, given by
the solution of Eq. (4.3.33) and £; (x) are eigenfunctions of the transposed kernel
4.3. Kinematics II: The ty-w and the u-u? Formulations
105
given by the solution of Eq. (4.3.29). These eigenfunctions are normalized so
that Eqs. (4.3.29) and (4.3.33) are valid for the decomposed kernel defined in
Eq. (4.3.40). Hence
L
j
[1,
= {
[0,
if / = 7
. ,
otherwise
(4.3.41)
£i(x) = const. = 1/L,
(4.3.42)
where L is the perimeter of the shape considered. Note that the eigenfunction
Pi(x) corresponding to the eigenvalue X\ = 1 is a solution of Laplace's equation satisfying the inviscid boundary condition in the absence of any external
flow field.
Now the condition imposed by Kelvin's theorem may be substituted by an
equivalent one by multiplying both sides of Eq. (4.3.27) by A.i pi(x) £i(xr), so
that the new set of equations is
/(x) - f G(x, x / )/(x / ) dxf = A(x),
(4.3.43)
(xVx--fr,
(4.3.44)
Adding Eq. (4.3.44) to Eq. (4.3.43) results in the final form of the integral
equation that needs to be solved for the unknown strength of the vortex sheet:
y(x) - I [j2(x, x') - ^ ] y(x') dx' = h(x) - ^
rQ.
(4.3.45)
In this form the new kernel is just the kernel given by Eqs. (4.3.40) but with
the first term in the spectral decomposition eliminated. Hence the singularity
associated with the kernel Q(x, xf) is annihilated and Eq. (4.3.45) is well posed.
When Eq. (4.3.45) is solved by panel methods, the resulting system of equations
is a well-conditioned one. Note that in the above formulation of the problem
it is necessary to know a priori the form of the eigenfunction p\ (x), which is
not available in general for arbitrary shapes. For elliptic bodies (including the
cylinder and the flat plate) this eigenfunction can be determined analytically
and is given as a function of the eccentricity e of the ellipse and the polar
angle 0:
Pl(0)
= [1 -ecos 2 ((9)r 1 / 2 .
(4.3.46)
For arbitrary configurations, we may obtain p\ (x) by solving the eigenproblem
106
4. Inviscid Boundary Conditions
(4.3.33) by using panel methods. We then obtain the eigenfunction by using
as collocation points the eigenvector of the resulting matrix. This adds to the
computational cost of the method, but this eigenfunction needs to be computed
only once for the considered shape. For the case of a cylinder, e = 0, so
the unknown function y(x) may be obtained directly as Eq. (4.3.45) reduces
to
Y(x)=h(x)--rQ.
(4.3.47)
4.3.6, The Kutta-Joukowski Condition
An extended potential flow model has been used extensively in the past decades
as an engineering approximation of steady, liftingflowspast streamlined bodies,
such as airfoils at small angles of attack. In these flows the viscous effects are
confined to a thin layer around the surface of the airfoil, and vorticity is shed
smoothly from its trailing edge. Potential flow can serve as an approximation of
this flow when it is complemented by an additional constraint that accounts for
the generation of the lift force and produces a pattern in which the flow leaves
smoothly at the trailing edge. As further discussed by Bachelor [18], when
separation is avoided and vorticity is shed smoothly from the trailing edge of
a lifting airfoil, a non-zero circulation is established for a contour surrounding
the airfoil. This circulation is prescribed by the Kutta-Joukowski condition,
which simply states that the proper circulation constant is precisely the value
that causes the flow to leave smoothly at the trailing edge of the airfoil.
We can further elucidate the need for the Kutta-Joukowski condition in a
potential flow model by considering the flow past an airfoil with a sharp trailing edge that satisfies Laplace's equation with the no-through-flow boundary
condition. This can result in a flow pattern in which the streamlines go around
the trailing edge (see Figure 4.2) and the velocity (or equivalently the suction)
at the trailing edge of the airfoil becomes infinite. If we consider this inviscid flow model as an approximation to a viscous flow, it would correspond to
a sharply reduced pressure and an inverse pressure gradient near the airfoil's
trailing edge. In a steady flow this would lead to flow separation with streamlines that do not follow the shape of the airfoil, thus contradicting our initial
assumptions. We can approximate a realistic flow pattern with the addition of
a circulation constant, which brings this separation point to the trailing edge of
the airfoil.
The use of this approximation has been strengthened by experimental results that have demonstrated that the lift experienced by an airfoil is practically
107
4.3. Kinematics II: The \P-UJ and the VL-UJ Formulations
( B )
( C )
Figure 4.2. Enforcement of the Kutta condition: A circulation (B) is added to the flow
pattern (A) to produce the flow pattern (C).
independent of the Reynolds number of the flow, once a critical value has
been exceeded. Hence the governing processes can be represented by inertial
considerations. However, in practice the trailing edge of the airfoil is not sharp,
as it's hidden beneath viscous boundary layers. Moreover the pressure difference on the top and the bottom of the airfoil results in uneven boundary layer
thicknesses. In reality the inviscid flow is not around the airfoil profile but
around a rather different configuration.
In spite of all these difficulties, the Kutta condition is one of the major working
assumptions in airfoil theory. Potential flow models that use the Kutta condition
have been extensively used in the design of airfoils and have been able to provide
a remarkably good estimate of the lift forces and pressure distributions for a
large number of different airfoil configurations.
4.3.7. The Vortex Shedding Model for Inviscid Flow Calculations
In engineering calculations, in order to approximate the dynamics of high
Reynolds number flows past lifting bodies, the inviscid approximation of potential flow is usually complemented by an unsteady vorticity generation mechanism to account for the injection of vorticity in the wake. A thorough review
of such models can be found in Ref. 183. Unlike the case of a steady flow,
here the goal is not to approximate a certain flow pattern, but to model the
108
4. Inviscid Boundary Conditions
unsteady vorticity generation mechanism while maintaining an otherwise inviscid evolution of the vorticity field. In general unsteady flows past airfoils are
accompanied by corresponding changes in the lift coefficient and the circulation about the airfoil. From Kelvin's theorem we realize that any change Y(t)
in the circulation around the airfoil must be balanced by an equal and opposite
change in the vorticity shed in the wake. A description of this physical process
is facilitated if we consider theflowfieldin terms of the extended vorticity field.
The vortex sheet can serve as a link between the kinematics of the flow and
the dynamic phenomena of vorticity generation at a body surface. Vorticity creation can be achieved if the vortex sheet is properly shedded into the wake of the
airfoil.
We formulate further the problem of vortex shedding by considering the
flow in a bounded domain VJ- with a boundary S, which is smooth except at
the trailing edge E, where it has a cusp (see Figure 4.3). When we solve for the
Euler equation with no external vorticity in V/ while enforcing the no-throughflow boundary condition, a singularity exists at the sharp corner of the body.
This singularity can be easily derived through conformal mapping techniques
for profiles like Joukowski airfoils. In order to obtain afinitevelocity at all body
locations, we can eliminate this singularity by creating a suitable vorticity field
in the domain. This vorticity must result from a shedding mechanism, which
we now describe.
Kutta
condition
panel
Figure 4.3. Shedding model for the trailing edge of an airfoil: (a) Flow at the trailing
edge of an impulsively started airfoil [164], (b) a point-vortex shedding model.
4.3. Kinematics II: The \P-w and the u-u; Formulations
109
Let us start with the Euler equations written in terms of velocity, vorticity,
and pressure as
u x uj + l/2V(|u| 2 ) = - V P .
(4.3.48)
dt
Taking the tangential component of the Euler equation and observing that
(u x UJ) • s = COM - n and that u • n = 0 on 5, we can write, after integrating
over S,
~ / u . s ^ + ^ [ | u ( ^ + ) | 2 - | u ( £ - ) | 2 ] = 0.
(4.3.49)
dt Js
2
In the above equation we denote by u ( £ + ) and u(E~) the values of the velocity
on the upper and the lower part of the edge, respectively. Moreover, we have
used the concept of the Kutta condition for steady lifting flows, setting the
pressure to be equal at the two sides of the cusp.
Now if we recall that the circulation on S is equal to the integral of vorticity
in V(, we obtain
This implies that vorticity must be created on S to ensure conservation of the
circulation. Now the only point where this vorticity creation can take place
is precisely the point E, since elsewhere the normal velocity is zero. Moreover, it is reasonable to set the velocity at this point to be the average velocity
u = l/2[u(£ + ) + u(£~)]. Hence Eq. (4.3.50) can be satisfied by introduction
in the flow at each time step of an elementary vortex sheet with length 8t u and
strength [u(£ + ) — u(E~)]. The effect of this vortex sheet is to extend the discontinuity from the surface of the airfoil to the region behind its trailing edge.
This mechanism must be understood as a limiting procedure of the underlying
viscousflow,in which vorticity would be created all over the body. The assumption behind the validity of this limiting behavior is that the vorticity does not
enter the flow through diffusion, but only through convection at the shedding
point. It is then convected downstream as a shear layer across which the velocity
difference is that of the velocity field on the two sides of the trailing edge.
A natural procedure to simulate this shedding mechanism in the flow past a
lifting airfoil consists of the following steps:
1. Discretize the boundary of the airfoil with M panels (see also Section 4.4).
2. Compute the surface vortex sheet in order to satisfy the no-through-flow
boundary condition over M elements of the boundary, as indicated in Subsection 4.3.5.
110
4. Inviscid Boundary Conditions
3. Compute the tangential velocities at the end points E+ and E~\ create a
new vortex at the point E + A^/2[u(£ + ) + u(E~)] carrying a vorticity of
magnitude At[u2(E+) - u2(E~)]/2.
4. Move the vorticities in the wake with the velocity induced by the extended
vorticity field.
This shedding model allows us to handle vorticity creation by means of a
quasi-inviscid method that fully takes advantage of the quasi-one-dimensional
structure of the wake.
Nitsche and Krasny [158] have made three-dimensional calculations of this
kind in order to simulate the vorticity generated at the orifice of a nozzle. In
Figure 4.4 we present the results of these simulations which provide an excellent
qualitative agreement with the results from related experiments.
4.4. Discretization of the Integral Equations
The integral equations that result from the enforcement of the kinematic boundary conditions can be discretized by use of various quadratures. A particular
method that has been used extensively in aerodynamics is the panel method,
pioneered by Hess in 1975.
In panel methods the boundary is discretized by use of a set of quadrilateralor (for moreflexibility)triangular-shaped elements and a distribution is assumed
for the singularity strengths over each element. The integrals over each element
(panel) can then be computed either by an exact integration or a local quadrature
formula.
The integral equations are thus replaced by a set of algebraic equations, and
the resulting matrix equations can be solved by means of direct and/or iterative matrix inversion techniques. These matrices are dense but fast summation
methods (see Appendix B) can be implemented, resulting in a computational
cost linearly proportional with the number of computational elements at the
boundary.
4.4.1. Panel Methods
In order to outline the panel method, we consider the discretization of integral
Eq. (4.3.25) that determines the strength of a vortex sheet distribution around a
two-dimensional surface:
y(x)
/ —(log |x - x'|) y(x f) dx' = -2u • s.
n Js dn
(4.4.1)
(M,
0.63
1.04
b
>/ .
*
3.31
(a)
(b)
Figure 4.4. (a) Experimental visualizations and (b) simulations of the vortex generated by a jet emerging from a nozzle. (Courtesy of M. Nitsche)
112
4. Inviscid Boundary Conditions
When we approximate the surface of the body by a set of M panels, the above
equation may be expressed as
M
iz
x — x
A
A
\ndl(xf)\ = -2u s.
(4.4.2)
The body points appearing in the integrals over each panel can be distinguished
by two categories. The first category contains the points on the panel itself
whereas the second contains points on the remaining portion of the surfaces.
For points belonging to the surface outside each panel, the position vector can
be set to the actual value and no singularity occurs. For points on the panel itself
care must be exercised in order to evaluate the integrals correctly.
The key elements in the discretization are the approximation of the geometry
of the body and the assumption of the singularity distribution over each panel.
We denote by x0 a point on the surface of the body around which we construct
a panel approximation, and we denote by n and s the wall normal and the
tangential vector on the body surface at this point, respectively. Then the surface
of the body in the vicinity of this point (see Figure 4.5) can be approximated
by the following expansion along the local tangential direction:
y = x0 + X! s
~2~Rn
+
O (*?) ,
(4.4.3)
Figure 4.5. Definition sketch for the approximation of a segment of a body surface by
a panel (—d, d).
4.4. Discretization of the Integral Equations
113
where Ro denotes the local radius of curvature of the body. By using this
expansion we can calculate the vector area element of each panel divided by
the distance from the center of the panel as
X -
(4.4.4)
X'!
Similarly, an expansion of the vortex sheet distribution over each panel can be
constructed as
y(\)
=
dy
^iu
(4.4.5)
+ ° (*i) •
The accuracy of the method increases by an increase in the smoothness
of the local approximation for the geometry and the singularity strengths. A
Taylor series expansion in terms of the size of the panels has shown [102]
that the order of the geometry approximation of the surface should be an order
of magnitude larger than the order of the singularity strength approximation.
Table 4.1 provides a summary of consistent approximations in terms of the
complexity of the panel geometry and the respective location of the enforcement of the boundary condition and the local distribution of the singularity
strength.
The articles by Hess [101, 102] and the book of Katz and Plotkin [113] are
good resources for a variety of singularity/panel distributions. In general the set
of integral equations is replaced by an equivalent system of linear equations of
the form
(4.4.6)
— ' m •,
where Amn denotes the influence of a unit singularity strength from panel n at
panel m, sn is the unknown strength of the singularity distribution at panel n,
Table 4.1. Consistent approximations for singularity strengths
and panel geometry
Order/Parameter
Singularity strength
Panel geometry
Boundary condition
Oth Order
1st Order
Concentrated at a
point - 8 function
Constant
height
Single point on
internal facet
Constant across
panel
Internal or
external facets
Single point on
actual surface
2nd Order
Linear variation
across panel
Parabolic or
facet + curvature
Average
across panel
114
4. Inviscid Boundary Conditions
and rm denotes the boundary condition as it is enforced on panel m. For constant
geometries the above set of equations is inverted only once and is subsequently
stored so that the enforcement of the boundary conditions is proportional to a
matrix-vector multiply, thus scaling with the square of the boundary elements.
However, this quadratic computational cost makes the method prohibitive for
geometries consisting of more than a few thousand elements (as it is usually
the case for three-dimensional configurations). This is another type of the classical Af-body problem that we have encountered in the case of the computation
of the Biot-Savart velocity field for vortex particles. This quadratic cost can
be reduced if multipole expansions are used to approximate the potential or
velocity field induced by the panels at distances that are larger than the characteristic length of the panel. In such cases an iterative method is implemented
for the solution of the matrix equation. Moreover the matrix elements are never
formed but the matrix-vector multiply is performed with the aid of the multipole
expansions.
4.5. Accuracy Issues Related to the Regularization near the Boundary
The integral equations discussed in the previous sections contain terms involving the vorticity in the flow field. We discuss here issues relating to the regularization of the kernels of these integral equations in the presence of boundaries.
4.5.1. General Setting
The vorticity field is discretized by particles, and we wish to implement finitesize blobs in order to avoid singularities in the calculation of the velocity field
and to allow for high-order quadrature approximations. The difficulty in implementing these smooth vortices can be illustrated by considering, for example,
Eq. (4.2.5). In this equation the integral corresponding to the interior vorticity is restricted to the domain Vt. This implies that if a particle is close to
the boundary and if we consider a spherical blob of the kind constructed in
Chapter 2 around it, we have to ignore the part of the blob outside Vt. At the
same time the basic feature of the blobs, namely that they contain the appropriate
mass, implies that such a cutoff in a spherical blob will introduce immediately
an 0(1) error in the reconstruction of a continuous vorticity field except, as
we have seen in Section 2.6, if the vorticity vanishes sufficiently fast at the
boundary.
One may argue that this error affects only the vorticity and is localized around
the boundary. Alternatively, since the velocity is proportional to an integral
of the vorticity, and, as the effect of regularization on the calculation of the
4.5. Accuracy Issues Related to the Regularization
115
velocity decays exponentially away from the blobs, this error will be of the
order of O(s) around the boundary and will reduce to the regularization error
away from the boundary [typically O(s2)]. However, it is important to realize
that the computation of the velocity at the boundary directly interferes with
the correct calculation of the boundary potentials that are required in formula
(4.4.1) for example; therefore an O(s) error in the calculation of the velocity at
the boundary may ultimately affect the calculation of the velocity well inside
the domain. Moreover, if the calculation of the velocity at the boundary is done
only within O(s) and if it is involved in a vorticity generation algorithm of
a kind that we will discuss later on for the Navier-Stokes equations, then the
O(s) error will accumulate at each time step and the whole algorithm will not
be consistent unless e <^C At. It is thus crucial to control the regularization
difficulties at the boundary.
We discuss here two ways to remedy this situation. The first one is to compensate for the loss of vorticity resulting from chopping blobs at the boundary
by locally increasing the strength of the cutoff with the constraint that the mass
of the blobs remains equal to one.
Let f denote the smoothing function for a spherical blob. We denote by x
a point in Vt and by r a positive number. One possibility is to consider the
following blob shape at the point x:
where the normalization Mix) is given by
Unfortunately, in general these blobs do not lead to clear explicit formulas for
their induced velocity field. Moreover it should be emphasized that they still do
not provide a consistent approximation of the vorticity field as e tends to 0. To
illustrate this issue we reproduce here a simple example from Ref. 151 (more
details on the construction of adapted blobs can be found in this reference). This
is a one-dimensional example with Q = [0, +oo] and f is the top-hat function
in the interval [-1/2, 1/2]. Straightforward calculations yield
(x + s/2
Me(x) = \
Ie
ifO<x<£/2
~ ~ ' .
if not
Now if we consider a uniform initial vorticity field u> = 1 and compare u; with
116
4. Inviscid Boundary Conditions
its regularization we obtain
{
0
ife<jt
l-x/e
+ \og(x/s)
ifs/2<x<e
.
1 - j c / e + log(l/2) if A: < e/2
At x = 0 for example the error is log(l/2) = 0(1). It thus seems that, compared with the usual spherical blobs, these blobs offer the advantage only of
conserving the total vorticity, but they do not improve the pointwise accuracy
of the computed velocity.
The second approach [194, 205] consists of using blobs with adapted shapes
near the boundary. Flat vortex sheets and elliptical blobs with a minor axis
smaller than the distance of the blob to the boundary are good examples of such
shapes. However, the formulas giving the parameters of these shapes are not
straightforward and it is not clear whether they can lead to efficient algorithms
in general geometries.
In closing, we wish to state that these issues are to some extent much easier
to deal with in the context of triangulated vortex methods (see Subsection 7.1.2)
or vortex-in-cell methods (see Section 8.2). The advantages of these methods
is that they do not require explicit regularization (hence avoiding the related
difficulties) for the computation of the velocity as this regularization is implicitly
contained in the reconstruction of a piecewise polynomial vorticity field on the
underlying mesh.
4.5.2. Particular Cases
We describe here several particular cases in which the simplicity of the geometry allows simple and accurate procedures to overcome the difficulties at the
boundary. To simplify the notation we will assume throughout this section that
ii£ n = 0.
In the general framework we assume that some smooth extension (u, u>) of
the solution (u, u?) of the original problem is available in some region (not
necessarily large) outside V;. The numerical algorithm can then be defined in
the following way:
1. First initialize particles xp with values of u>0 (this includes particles outside
Vt).
2. At each time step define a collection of blobs,
p
where fe is a smoothing function with spherical symmetry.
4.5. Accuracy Issues Related to the Regularization
117
3. Using, for example, integral formula (4.4.1), compute the velocity fields u e
in Vt that satisfy
V x u£ = <jj£ in Vt•;
ue
n = 0
on S.
(4.5.1)
The only thing that is not defined so far in this algorithm is the velocity
field of the particles lying outside V/. To be more specific, let us focus on the
two-dimensional case. The solution proposed in Ref. 203 is to extrapolate the
velocity from values known inside the domain. If xp e R2 - V/, define x°p9 its
nearest point on 5, and the two points in Vj? as
£1
9Y^
Y
x2 —
^Y°
— 2x
(4.5.2)
Finally move the points outside V; with the velocity computed according to the
rule
ue(xp) = 3uE (xlp) - 2u, (x2p).
(4.5.3)
Clearly the accuracy of the whole scheme is conditioned only by criteria already
defined for the blob shapes in the whole space problem and by the accuracy
of the extrapolation steps of Eqs. (4.5.2) and (4.5.3). Owing to the fact that
we assumed that ii is smooth, this extrapolation can be proved to be of second
order. It is possible to write improved extrapolation formulas.
It is important to note that, because of the no-through-flow boundary condition, particles outside the domain remain outside; therefore it is not neccesary
to feed the neighborhood of V/ with fresh particles. Figure 4.6 shows how the
contribution of particles outside V; affects the calculation of the velocity in
the domain in a way that clearly differs significantly from the previously seen
schemes.
Figure 4.6. Vortex blobs for an extended vorticity field. The shaded area represents the
parts of the blobs that contribute to the velocity evaluation in VJ.
118
4. Inviscid Boundary Conditions
The major practical difficulty here obviously lies in the initialization of particles outside the domain. This makes it necessary to have an explicit description
of the extension of the initial vorticity. Moreover, the way to explicitly construct the particles at x^ and xp is not obvious if the geometry is not simple
(for example, there might be several neighbors of a given particle outside the
domain if the boundary has corners).
Finally we describe a classical particular case in which all formulas are
explicit and easy to implement. This is the case of the half plane or of geometries that can reduce to this case through conformal mapping. We assume here
that
Vi = [\= (XuX2),X2 > 0}.
We still wish to solve Eq. (4.5.1), with an additional prescribed behavior at
infinity U(JCi, xi) -> 0 for x2 ~> +oo, but now we observe that if u is a solution
and if we make an odd extension CJ across the boundary x2 = 0, by defining
{
UJ(X\, xi)
if X2 > 0
—<jj(x\,X2)
if not
then u = K * a> coincides with u in Vi. Therefore we deal with a problem in
the whole space and we can use smoothing kernels with spherical symmetry.
In practice this consists of considering image particles across the boundary,
carrying circulation with opposite sign. The accuracy in the regularization is
now limited only by the smoothness of u>. Actually this function is not always
differentiable at the boundary, and the regularization error on the vorticity might
very well be large. However, we again observe that we compute velocities and
not vorticities, and we can take advantage of the additional smoothness provided
by the integration step involved in the computation of the velocity.
We repeat here the simple argument given in the proof of Lemma 2.6.2 to
show that the regularized velocity is actually a first order approximation. Let
p > 1 be a real number and 0 be a smooth test function with compact support;
let f be any spherical cutoff function and set LJS = u> • fe. Then
\(Qe - G), 0)| = |(d>, 0 * $£ - 0)1
This estimate directly shows that, with the notations introduced in Appendix A,
4.5. Accuracy Issues Related to the Regularization
119
\\G)e — u>||_i)/7 = 0{e), and, in view of Eq. (A.3.6),
||K*(a> e -a>)|| 0 ,p < Ce.
This error estimate improves to second order away from a layer of width s
around the boundary.
It turns out that this method of regularization is more efficient than could be
inferred from this estimate.
An important point to note is that the normal velocity given by this construction vanishes at the boundary, without any need to incorporate further single- or
double-layer potentials that would propagate the boundary errors to the whole
flow. Furthermore one can prove that the tangential velocity is computed with
second-order accuracy. This is very important in view of the fact that this component of the velocity is generally used to incorporate vorticity in theflowwhen
we are solving the Navier-Stokes equations. We summarize these properties in
the following.
Proposition 4.5.1. Assume that u> is of class C 1 with compact support in V, =
{x = (x\, JC2), x2 > 0}. Let u, u>, u be defined as given above and set ue =
u * fe, where £ is a spherical cutoff function. Then
(i) ||u-u e || 0 ,oo = O(e),
(ii) ue • n = 0 on S,
(iii) | | u - s - u e .s||Loo(iS) = O(s2).
Proof. The first assertion has already been proved, and the second one results
from elementary symmetry considerations; so we turn immediately to the third
one.
To simplify the notation we drop the overbars everywhere so u? will denote
a function defined in R2 with a discontinuity on S and smooth on each side of
dQ. We can always write u(y\, y2) = X(y\)H(y2) + smooth function in R2,
where X has compact support and H is the Heaviside function. The smooth part
of the vorticity can be handled in the usual way. It will produce a regularization
error of the order of O(s2) and we can focus on the discontinuous part.
We can split the regularization between the x\ and the x2 components. The
x\ component, in which direction the vorticity is smooth, will again produce
an order 0{s2) error. This enables us to focus on the case when X(y\) = 1 in a
ball of radius M and vanishes outside. We further simplify the calculations by
assuming that £ is the characteristic function of the square [-1/2, -j-1/2]2. We
120
4. Inviscid Boundary Conditions
can now write
u • s(* lf 0) - u£ • s(*i, 0) = /
J
Jl
\*-y\2
M y ) - u>£(y)]dy2
= f dyx
V
-M
dyi
Jo
(1 - y 2 / g )
4
2 , 2
*f + yf
Xf + yf
Note that the terms of order s that arise from the integrals of the terms y\lx\ +
y\ + y\ cancel because of symmetry.
•
Let us now discuss how this particular case in which the calculations are
simple and accurate can extend to more general situations. First, as already
mentioned, it is possible to recover all cases that can be deduced from the half
space through conformal mappings; this is the case of the domain exterior to a
disk, for which the conformal mapping can be easily written in terms of complex
coordinates. All polygonal domains, including domains where one or more of
the vertices is located at infinity, can also be mapped to the half space through
a conformal mapping that can be explicitly written in complex coordinates. In
all these cases, the construction of image particles and the computation of the
velocity are easy to implement.
More generally one may wonder about the accuracy of a procedure that would
consist of locally replacing the computational domain by the half space limited
by the tangent plane to a given point of the boundary. Assume that the boundary
is smooth and there exists some conformal mapping F from V/ to the half space,
but for which explicit formulas are not known. Assume that for each point x in
an s neighborhood of S, there exists a unique normal n(x) passing through this
point and define x = x — 2d (x, S) v (x). The exact procedure for determining the
velocity with no-through flow at the boundary would be to consider images in the
complex plane and then to use x' = F~{ [F(x)] instead of x. However a Taylor
series expansion of F around the point of the boundary x - d(x, S) shows that
the distance between x and the true image xr is of the order of 0{e2). Therefore
the construction of u>£ based on the images x introduces an additional O(s2)
error in the regularized vorticity, and one can expect the computed velocity
to be an O(e2) approximation of the exact velocity. Note, however, that the
normal velocity component will not be exactly zero, unlike the case in which
true images are used, and that the calculation of x itself is not straightforward.
Viscous Vortex Methods
Vortex methods were originally conceived as a tool to model the evolution of
unsteady, incompressible, high Reynolds number flows of engineering interest.
Examples include bluff-body flows and turbulent mixing layers. Vortex methods
simulate flows of this type by discretizing only the vorticity-carrying regions
and tracking the computational elements in a Lagrangian frame. They provide
automatic grid adaptivity and devote little computational effort to regions devoid
of vorticity. Moreover the particle treatment of the convective terms is free of
numerical dissipation.
Thirty years ago simulations using inviscid vortex methods predicted the linear growth in the mixing layer and were able to predict the Strouhal frequency
in a variety of bluff-body flow simulations. In three dimensions, we have seen
that inviscid calculations using the method of vortex filaments have provided
us with insight into the evolution of jet and wake flows. However, the inviscid
approximation of high Reynolds number flows has its limitations. In bluffbody flows viscous effects are responsible for the generation of vorticity at the
boundaries, and a consistent approximation of viscous effects, including diffusion, is necessary at least in the neighborhood of the body. In three-dimensional
flows, vortex stretching and the resultant transfer of energy to small scales produce complex patterns of vortex lines. The complexity increases with time, and
viscous effects provide the only limit in the increase of complexity and the
appropriate mechanism for energy dissipation. In this chapter we discuss the
simulation of diffusion effects in the context of vortex methods. The design of
particle schemes to handle viscous effects is compelled by the desire to maintain the Lagrangian character of vortex methods. The mechanisms of vorticity
generation and the related numerical results are discussed in Chapter 6.
In a time-stepping scheme, a natural approach is to consider successively
in substeps the inviscid and the viscous parts of the equations. This algorithm,
121
122
5. Viscous Vortex Methods
known as viscous splitting, relates to the classical concept introduced by Prandtl,
as early as 1904 [164], of distinguishing the viscous and inviscid phenomena
in the flow.
Chorin [49] formulated the method of viscous splitting for vortex methods.
For an unbounded flow, in a time-stepping algorithm the scheme proceeds as
follows. In the first substep vortices move with the local velocity to satisfy the
inviscid part of the equations. In three dimensions vortex stretching is considered at this substep by a change in the strength of the vorticity-carrying
elements. Diffusion effects are taken into account at the following substep.
Chorin envisioned the resolution of diffusion effects in the mean, exploiting the
stochastic character of the diffusion equation. He introduced the well-known
method of random walk, in which particles undergo a Brownian-like motion to
simulate the effects of diffusion. Viscous splitting and random-walk methods
are described in Sections 5.1 and 5.2, respectively.
Although physically appealing, the random-walk method suffers some limitations, essentially because of its lack of pointwise accuracy. In the 1980s other
methods were proposed to allow more flexibility in the choice of numerical parameters and increase the accuracy with which diffusion effects are described.
The first such scheme was introduced in 1983 [169] with the idea of modifying the strengths of the particles instead of their locations. It again required
a viscous splitting step algorithm and relied on the Green's function solution
of the diffusion equation for small time steps. The integral was discretized by
use of the locations of the Lagrangian computational elements as quadrature
points. It amounts to neighboring particles with Gaussian shapes exchanging
their vorticity so as to simulate diffusion effects.
It is interesting to mention here the close link of this formulation with the description of the diffusive process envisioned by Lighthill [138]. Lighthill states
that "vorticity is proportional to the angular momentum of a spherical particle
about its mass center, and when it diffuses/rora one particle to another the relevant angular momentum is about quite a different point. The correct view relates
diffusion of vorticity to that of momentum, through that of momentum gradient." This is a consistent definition with the redistribution of particle strengths
as each component of vorticity is proportional to a momentum gradient. This
observation serves as one more manifestation of the close link of physics and
mathematical concepts in the development of vortex methods. These so-called
resampling methods are discussed in Section 5.3.
Subsequently it was realized that the idea of redistribution of the particle
strengths could be generalized in the framework of integral approximation of
the diffusion equation. Moreover these observations lead to the realization that
5. Viscous Vortex Methods
123
viscous splitting is not a prerequisite for these methods. Physically speaking,
diffusion is acting in a continuous manner on the vorticity field while it is
transported along the trajectories of the fluid elements. The result was a class
of methods admitting high accuracy in both time and space discretization and
able to handle a variable viscosity coefficient, which we would call, in general,
particle strength exchange (PSE) methods. The PSE method is discussed and
analyzed in Section 5.4.
Section 5.5 is devoted to two other variants on the theme of viscous redistribution. Thefirstone is in the spirit of the free Lagrange methods, originally used
for compressible flow calculations [86]. These techniques are close relatives of
finite-element methods and are based on Voronoi diagrams for the generation
of a well-triangulated space from the irregular particle locations. These techniques have been implemented in two-dimensional flows, but they introduce a
significant degree of complexity into the method and may require considerable
effort to be extended to three-dimensional flows. The second one consists of
adaptively determining the amount of vorticity to be transferred between neighboring particles through discrete versions of the momentum properties used for
the derivation of PSE schemes.
An immediate observation of the results obtained by means of the available
viscous schemes is that vortex methods face the same problems as all standard
numerical methods regarding the scales that can be resolved. Returning to
the realm of engineering applications, we may consider then the applicability
of viscous vortex methods to such simulations. As will be further elucidated,
viscous vortex methods retain their adaptive properties and they can still be used
as computational tools for the simulation of complex unsteady flows. However,
as one cannot expect to resolve all the scales of the flow, turbulence models or
large-eddy-simulation-(LES-) type formulations are necessary to apply viscous
vortex methods to most problems of engineering interest.
As a matter of fact, it appears that earlier successes of two-dimensional
viscous vortex methods (including the core expansion scheme) in reproducing
flow quantities measured experimentally were due to the turbulence modeling
implied by these techniques, rather than an accurate treatment of the diffusion.
More recently, formal turbulence modeling and LES methodologies have been
introduced. In the former category we discuss the method of hairpin removal,
introduced by Feynman in 1957 [82] and Chorin in 1990 [52]. In the latter we
consider recent results that rely on the formulation of the PSE scheme for flows
of variable, nonlinear, spatial diffusivity.
In closing this introduction, let us mention that, in order to focus on the treatment of diffusion effects by vortex methods, we will deal in this chapter, except
124
5. Viscous Vortex Methods
for its last section, with two-dimensional flows for which the Navier-Stokes
equations become in a Lagrangian frame a diffusion-type equation. However, it
must be pointed out that all the described numerical schemes can easily incorporate the treatment of vorticity stretching as described in Chapter 3. Some of
our numerical illustrations will indeed concern three-dimensional simulations.
Most often the numerical analysis carries on to three dimensions as well.
Except in Section 5.1 below, in which the implications in numerical accuracy of the viscous splitting is discussed for the full Navier-Stokes equations,
we would prove the convergence of the schemes in only the linear case. The
underlying claim is that if, on the one hand, one is able to prove stability and
consistency in the approximation of the viscous terms and if, on the other hand,
convergence is well understood for the nonlinear Euler equations (see the convergence results in Chapters 2 and 3), convergence for the full Navier-Stokes
equations will follow.
5.1. Viscous Splitting of the Navier-Stokes Equations
The evolution of the vorticity field in a two-dimensional viscous flow is described by the Navier-Stokes equations which may be expressed in a velocityvorticity (u, co) formulation as
dco
— = dt
u
Vco + vAco.
(5.1.1)
The velocity field is obtained by solving the Poisson equation (Au = — Vxco).
The evolution of theflowis considered in discrete time steps. In each time step
the vorticity field is convected (according to u • Vco) and diffused (according
to v Aco). The algorithm of viscous splitting consists of substeps in which the
convective and the diffusive effects are considered successively. The algorithm
may involve several substeps in order to increase the accuracy of the viscous
splitting.
The two-step viscous splitting algorithm may then be expressed as
• convection:
dco
dt
1- u • Vco = 0;
• diffusion:
dco
— = vAco.
dt
5.7. Viscous Splitting of the Navier-Stokes Equations
125
Equivalently the viscous splitting algorithm may be expressed in a Lagrangian
frame as
• convection:
dxp
~dt~
dco
dt
• diffusion:
dx
^
=0,
dt
dt
= vAco(xp),
where x^ and cop denote the locations and the vorticity, respectively, carried
by the fluid elements. In the viscous splitting algorithm, in the first substep the
fluid elements are advanced with the local flow velocity. Diffusion acts at these
new locations to modify the vorticity field of the flow.
5.7.7. The Model of the Linear Convection-Diffusion Equation
Before analyzing the viscous splitting algorithm for the Navier-Stokes equation, we discuss a viscous splitting algorithm for the simpler case of a linear
convection-diffusion equation.
We consider the viscous evolution of a scalar field W(x, t) convected by
the known velocity field c(x, t) according to the following linear convectiondiffusion equation:
+ c . VW = vAW,
with initial condition W(x). By denoting by A the convection (c • V) operator
and by B the diffusion operator (v A),
c V -> A,
vA -> B,
we may express the above equation as
dW
= A W + BW
dt
126
5. Viscous Vortex Methods
[since our interest is ultimately in fully discrete schemes, we may prefer to view
A and B as spatial discretizations of (c • V) and (vA), respectively]. Integrating
the above equation in operator form, we may express the solution as
W(t) = Woe(A+B)t.
We can construct the solution of the above equation by advancing in discrete
time steps (St). The equation
dW
= AW + BW
dt
is solved at each interval [nSt, (n + l)8t] with W(n8t) = Wn as the initial
condition. The solution may be expressed in operator form as
In a two-step viscous splitting algorithm, the equation is solved in the following two substeps:
Substep 1 - convection:
dW
= AW.
dt
When Wn is used as the initial condition, the solution of this substep may be
expressed as
With Wn+^ as the initial condition, the diffusion equation is solved at the
following substep.
Substep 2 - diffusion:
dW = BW.
dt
The result of this two-step procedure is
In general
eB8teA8t
/ e(A+B)8t
5.7. Viscous Splitting of the Navier-Stokes Equations
111
This may be clarified by a Taylor series expansion of the exponential forms for
a small time step:
eBS,eAS,
=
[
o>2
"I
I + 8t(A + B) + — (A + B)(A + B) + • • • ,
where / is the identity operator. It can be easily verified that the two expansions
are equivalent only if the operators A and B commute, i.e., if AB = BA. In
the present case, this would be the case for a velocity field independent of x.
Generally speaking, the two-step viscous splitting algorithm is second-order
accurate at each time step and first-order accurate overall.
Note that higher-order algorithms may be devised by considering further
substeps. Higher-order schemes can be devised by considering the following
three-substep procedure, which may be expressed in operator form as
yy
e8teBSt/2\
^
A Taylor series expansion reveals that this procedure introduces errors of O (8t)3
at each time step and O(8t)2 overall.
We are reminded here that the above results hold for the idealized problem
in which the velocity field is known a priori. In the case of the Navier-Stokes
equations the nonlinear relationship of velocity and vorticity do not allow for
this simplification.
We present below a rigorous analysis for the error introduced by viscous
splitting in the fully nonlinear case in two dimensions.
5,1.2. Error Estimates for the Viscous Splitting of the
Navier-Stokes Equations
In this section we make constant use of the notations and results of Appendix A.
2
Let us also introduce some additional notation. For 8t > 0 and COQ e L°°(R
)n
1
2
L (R ), we denote by E(t)coo the solution at time t to the Euler equation:
- ^ + (u • V)a> = 0
ot
with initial conditions a)0. The velocity field is obtained from the solution of
the Poisson equation Au = — V x co by means of the Biot-Savart law as
u(x)= /
•
/
K(x-y)a>(y)dy,
128
5. Viscous Vortex Methods
where, for two-dimensional flows,
K(x
M x - y)^
2TT | x - y | 2
} =
We denote by Hv(t)o)o the solution at time t of the diffusion equation,
dco
— = vAco,
dt
with initial vorticity OJQ. It is well known that the solution of the diffusion
equation may be expressed in integral form as
co(x, t) = f g(x-
y, vt)coo(y)dy = Hv(8t)co0(x),
(5.1.2)
where Q (the "heat kernel") is the Green's function solution to the diffusion
equation. In two dimensions
£(x - y, s) = - L e - l - y l 2 / ^
Ans
{5A3)
The viscous splitting of Navier-Stokes equation (5.1.1) produces the following
sequence of:
ojn+l = Hv(8t)E(8t)con,
(5.1.4)
where of is sought as an approximation of the exact solution oj(-,tn), at time
tn = n8t. The convergence of this method is given by the following theorem:
Theorem 5.1.1 [24]. Ifco0 e W3oo(R2)nW3l(R2)
holds for all p e [1, +oo]:
then the following estimate
\\ajn-o)(.,tn)\\0,p<C(T)v8t.
(5.1.5)
We reproduce here the essential steps in the proof given in Ref. 67. We denote
by Sv the operator that gives the exact solution co of the Navier-Stokes equations,
and we start from the following induction expression:
con+l - co(>, tn+i) = Hv(8t)E(8t)[o)n
v
- co(., tn)]
v
- [S (8t) - H (8t)E(8t)]co(., tn).
(5.1.6)
We know (see Appendix A) that neither the heat equation nor the Euler equations
increase Lp norms; hence
\\Hv(8t)E(8t)[con-aj(.,tn)]\\o,p
< \\(on-a>(',tn)\\0tP.
(5.1.7)
5.7. Viscous Splitting of the Navier-Stokes Equations
129
It remains now to prove that, for X smooth enough,
\\[Sv(8t) - Hv(St)E(8t)]X\\0,p
< Cv8t2.
(5.1.8)
Let us set /x(-, 0 = [Sv(t) - Hv(t)E(t)]X. From the definitions of S\ H\ and
E, we get
- ^ = [-( a y • V)Sv(t) + vASv(t) ot
+Hv(t)(a-V)E(t)]X,
vAHv(t)E(t)
where a"(-, t) and a(-, t) stand for K * [Sv(t)X] and K * [E(t)X], respectively.
We can rewrite the above equation as
^
a
VIXVAIX
+ R \ + RV2,
(5.1.9)
Ot
with
RV(-91) = // y (0(a • V)E(t)X - (a • V)Hv(t)E{t)X.
With zero initial conditions for /x, the stability for advection-diffusion equations
requires control of the source terms R\ and R^. Using either the maximum
principle if p = +00 or multiplying Eq. (5.1.9) by \JJL\P~2IJL, if p is finite, one
easily obtains
j
t
,
p
<\\(RV{ + Rv2)(;t)\\Op.
(5.1.10)
We now turn to estimating R\ and R2. For R\, we first write
Next we observe that
\\Hv(t)E(t)X\\Up
< \\E(t)k\\i,p
< C(||A.||i,i +
\\X\\Uoo).
On the other hand, elliptic regularity properties of the convolution by K yield
||(a - a")(-, OH,,.*, < C{\\[Sv(t) - £(r)]A.||0,oo + \\[Sv(t) - E(t)]X\\0A} .
But it is readily seen that
\\[Sv(t) - £(r)]A.||ol00 + \\[Sv(t) - £(f)]A.||0.i < Cvr(||A.||2.i
130
5. Viscous Vortex Methods
hence we get
K G , olio,, < cvt(\\x\\2A + ii^ib,oo)2.
(5.1.H)
For Rv2, we write Hv = Id + H\ where
\\Hv(t)f\\k,p < vmax\\AHv(tf)f\\k,p
< Cvt\\f\\k+2,p.
The contributions of the identity obviously cancel in R^, and we are left with
Since /x(-, 0) = 0, when combined with relations (5.1.10) and (5.1.11), this
proves relation (5.1.8). In view of Eqs. (5.1.6) and relation (5.1.7) we thus have
\\con+\ - co(-, f w + i ) | | o , p < \\o>n ~ <*>(', tn)\\o,P + C v 8 t 2
and by induction our desired estimate (5.1.5).
5.2. Random-Walk Methods
The random-walk method was introduced by Chorin [49] for the simulation of
slightly viscousflowsby vortex methods. The method relies on the probabilistic
interpretation of the Green's function integral solution to the diffusion equation
and on the relationship between diffusion and random walk (Brownian motion)
of vorticity-carrying particles.
The implementation of the method is inherently linked to the viscous splitting
algorithm. The vorticity field established after the convection step is used as
an initial condition for the diffusion equation. In order to simulate diffusion
effects, the particles then undergo a Brownian motion. The positions of the
particles are updated over one time step 8t according to the following rule:
x"p+l=x"p+ep,
(5.2.1)
where £np are random numbers drawn with a Gaussian probability distribution:
G(y, e/2) =
1_ , ^
(V2)
(5.2.2)
with zero mean and variance s = 2v8t (d is the dimension). Subsections 5.2.1
and 5.2.2 show that sampling of the vorticity field at these particle locations
indeed approximates the solution of the diffusion equation.
52. Random-Walk Methods
131
Equations (5.2.1) and (5.2.2) provide the recipe of the random walk in the
absence of boundaries. As is evident, the method of random walk is simple and
maintains the Lagrangian character of vortex methods. We will see in Chapter 6
how random walks of particles near boundaries account for no-slip boundary
conditions.
5.2.1. Design
Although it is customary to analyze this method with tools from stochastic differential equations, following Ref. 36 we will adopt the viewpoint of quadrature
rules based on random choice of quadrature points. This is consistent with the
view that vortex methods operate on integrals discretized by use of the locations
of the computational elements as quadrature points.
Let us first recall that the solution to the heat equation can be given the
following integral representation:
co(x, t) = / Q(x - y, vt)co0(y) dy,
where Q denotes the heat kernel. In order to derive a particle approximation
of co it is convenient to integrate the vorticity field with a test function 0. A
particle representation of co amounts to discretizing the integral by a quadrature
on the particle locations. The accuracy of this approximation is discussed in
Appendix A.
Integrating co against 0 gives
G(x - y, vt)co0(y)c/)(x) dx dy.
We now approximate this integral by using quadrature points uniformly distributed according to the measure Q(x — y, t) dx; more precisely, given the
explicit form of Q in Eq. (5.1.3) and using successively the changes of variables
(x, y) —> (x, r) —> (x, u) defined by
x — y = rel°,
/
thenw=exp(
we can rewrite
{(o(-,t),<t>) = —
2TC
/ dy /
dO I
J
JO
JO
where R(u, t) = ^/—4tlogu.
r2
132
5. Viscous Vortex Methods
The integral is calculated numerically with TV random quadrature points
(yP, up, 0p) uniformly distributed in [0, I] 2 x [0, 1] x [0, 2n]. Formula (A. 1.4)
in Appendix A yields
1
<<»(., t), 0) « - X^^(y P )0[y P + R(up, vt)ei0'],
P=\
where the % sign means an approximation in the sense of the expectation with
respect to all possible drawings of random numbers. The approximation error
is analyzed in Subsection 5.2.2.
This derivation shows that it is admissible to approximate the vorticity after
one time step by a set of particles located at the points yp — R(up, vt)el9p; in
other words,
co(x, t) % —^2(Oo(y p)S[x
P=\
-yp-
R(up, vt)ei0"].
Note that, while the initial distribution had a compact support, the particles
yp + R(up,vt)el6p may lie anywhere in R2. However, they are essentially
located within a distance of 0{y/vi) from the support of COQ. This reflects the
fact that diffusion acts instantaneously to spread out the support of the vorticity
field.
Simulating n steps of the diffusion equation is equivalent to convolving
n times the diffusion kernel Q, for
<?(-, nvSt) = (?(., vSt) • • • • • <?(•, vSt) ,
and the solution at time tn = n8t can be expressed explicitly as
(co(-, tn), 0) = / <uo(yi)<?(y2 - yi, v8t)G(y3 - y2, vSt) • • •
G(yn ~ yn-u v8t)G(* - y«, v«r)0(x) dy
{
• • • dyn dx.
Using now the change of variables,
zi = y i , z 2 = y 2 - y i , . . . , z n = y n - y n _ i , z n + i = x - y n ,
we have x = zi + • • • + z n + i; setting z7 = rjel$J and uj = exp[—(r j)2/4v8t],
5.2. Random-Walk Methods
133
we obtain the following approximation:
- R(ulp, v8t)eldp
(o(x, tn) « — ^2(jOo(y p)8\x-yp
p
+ R(u2p, v8t)eie2p + • • • 4- R(unp,
v8t)ew?
The N points [y^, (6lp, ulp)i] are randomly distributed with a uniform density
in [0, I] 2 x [0, 2n]n x [0, l]n. It is important to note that, for a given number
of particles N, the large dimension of the integration space, In + 1 for n time
steps, does not affect the accuracy of this approximation since it is based on the
law of large numbers. This will be seen more clearly in the numerical analysis
below.
We can now define the random-walk method for the original convectiondiffusion problem (5.1.1) by inserting regular Euler advection steps between
two successive random walks. The resulting approximate vorticity coh can be
written as
(oh(x9t) = -YjCD0(yP)8\x-Xh(t)],
(5.2.3)
with Xhp defined by
Xhp(t) = X h ( t ' , y n p , t n ) ,
for
tn<t<tn+{
and
y"p = X*(rB; f~\
*„_,) + R{u"p, vSt)ew'i
As usual X7* denotes the characteristics associated with the velocity field u^ =
Ke • coh, where the mollification Ke is defined from the Biot-Savart kernel K,
as discussed in Section 2.3.
5.2.2. Numerical Analysis
We present the convergence analysis of random-walk techniques for the solution
of the linear convection-diffusion equation:
dco
ot
h div (aa>) - v Aco = 0,
(5.2.4)
<y(.,0) =co0.
(5.2.5)
134
5. Viscous Vortex Methods
For the convergence analysis of random-walk techniques in viscous splitting
algorithms for the solution of the full Navier-Stokes equations we refer to
Refs. 94 and 139.
In our proof, we will follow the approach suggested by Brenier [36], which
is based on quadrature estimates. This proof is quite simple and illustrates well
the importance of the randomness involved in the simulation of the diffusion.
Since we have already proved the convergence of the splitting, we fix a time
step 8t and compare the random-walk solution with the sequence of defined
in Eq. (5.1.4) (in the present situation, the Euler step is replaced by a simpler
linear advection step).
Let us now introduce some additional notation. We denote by ^ the space of
sequences in [0, I] 2 . A point in *I> will be noted as
Y = [Yo, Yi = (Ml,
0I/2TT),
...,Yn = (un, 0n/27z),
where Yo is the initial condition and (M/, 0,-) are in [0, 1] x [0, 2n].
We next define the sequence of mappings Gk defined by induction for k e
[0,n] in the following way:
G°(Y0) = Yo; G*(Y 0 ,..., Y*) = X[fc; Gk-\Y0,...,
+
Y*_,)
R(uk,vAt)eiek,tk-l],
where tk = k8t and X are the characteristics associated with the flow a.
In other words, Gn consists of n successive random walks parameterized
by the vectors Y/, / e [1, n], starting from the vector Yo and alternating with
n advection steps. An element Y G ^ defines through the mappings Gk the
evolution of a single particle.
We then denote by Q = *I>N the set of all possible random choices. These
include the particle initializations and the successive drawings for the random walks. The random-walk method is thus parameterized on the choice of
quadrature points in Q. Given a sequence (Yl) e Q, we will finally denote
by coN[-, tn, (Y')l random-walk approximation (5.2.3) using the TV first elements of (Y*), that is, particles YQ, . . . , Y^ for the initialization and for the
fcth, k < n random walk, the quadrature points Yj. = (u\, O^/ln),..., Yf =
iuNk,0»/2n).
In order to analyze the accuracy of the approximation we consider a mollification of the vorticity field discretized on the computed particle locations. This
mollification is defined as usual by
<o?[x, tn, (Y<)] = [<Dh\y, tn, (Y f )]k(x -
y)dy,
where t;£ is a cutoff function. We can now state Theorem 5.2.1.
5.2. Random-Walk Methods
135
Theorem 5.2.1. Assume that coo is in L2 (R2); then for almost all random choice
(Yl) e £2, we have
when N —• oo, e -> 0 with Ns
2
—> oo.
Proof. We compare co£ with ofe = of * fe, as we know that a>" tends to &>n at
a rate depending on the moment conditions of the cutoff fe. On the one hand,
in view of the definition of the mapping Gn and Eq. (5.1.4) we can write
[x-GB(Yo,...,Y(I)]dYo-"dYII.
On the other hand we also have
I
^iVr,. + / v ' M
\ ^ , . (\ri \ y \
O)£ [X,tn, (Y )J = ^ 2 ^ ^ ° i Y oi ^ L X ~
v
r^n (\riY
G
V 0' • • "
\ri
Y \~\
njj-
^ [ • » ^«» (Y')l is thus a quadrature estimate for co", with a random choice of
quadrature points, as analyzed in Appendix A. More precisely, Lemma A. 1.3
enables us to write
JdxJ
K(x) - <[x, tn,
< 1 J |a>0(Y0)Ux - G B (Y 0 ,..., YB)
We then use the bound |fe| < C6:~2 to obtain
- G"(Y 0 ,..., Y,,)]
2
U x - G"(Y 0 ,..., Yn
The function of x on the right-hand side above can be seen as the result of n
advection-diffusion steps, acting on \OJO\2, followed by a convolution with |fe |.
Since the advection velocity field has been assumed divergence free, none of
these steps increase its integral, which is thus bounded by that of \coo\2.
This finally yields
jdx J
-wNe[x,tn,
from which our claim follows.
(Y'")]|2 < j - ^
136
5. Viscous Vortex Methods
Combined with relation (5.1.5), this result shows the convergence of the
random-walk method for almost all random drawings. In two dimensions, the
number of particles N asymptotically scales as h~2, where h is the mean spacing between nearby particles. The condition Ns2 —> oo in the assumption of
Theorem 5.2.1 thus relates to the usual overlapping condition h <^C s. The low
convergence rate h/s2 in relation (5.2.6), however, indicates that a large number
of particles would be required for obtaining a reasonable pointwise accuracy
for the computed vorticity.
5.2.3. Results for Random-Walk Simulations
To illustrate the method of random walk we first consider here some simple
one-dimensional numerical experiments that confirm the above convergence
analysis.
We consider the following problem:
— = vAco,
dt
x
<W(JC,O) = xe~ \
(5.2.7)
(5.2.8)
The solution to this problem may be expressed in integral form as
/»OO
Q{x - y, vt) ye~y2 dy,
co(x, t) = /
J — oo
where Q is the one-dimensional heat kernel.The above integral may be calculated explicitly to give
afx(x,t) =
xe-x2/(l+4vt)/(l+4vt)3/2.
In the context of the random walk, the integral solution may be interpreted
as follows: Place N randomly spaced particles on the line x > 0, in the computational domain, and at positions xf,i = 1,..., Af, and assign to each particle a
strength of f(xt)/N, where f(x{) = cofa, 0). Then let the particles undergo
a random walk by changing the positions of the particles at each time step 8t
under the following rule:
Jcf
+I
=xf+^,
(5.2.9)
where §" are Gaussian independent random variables having mean 0 and variance 2v8t. Now as we let the number N of particles go to infinity we may
observe that the expected distribution of the particle strength on the x axis
5.2. Random-Walk Methods
137
would approximate the exact solution:
lim S£,/(*>(* ^ * + ' * , r
N^OO
Ndx
r) =
^
t).
(5.2,0)
In Figure 5.1 the results of the computation for several numbers of particles,
with a time step 8t = 0.5 and a sampling interval of dx = 0.175, are shown.
One may observe the slow convergence of the method that, in accordance with
relation (5.2.6), has been estimated to be of 0{\/^/~N) in Ref. 153. In order
to check this estimate a series of numerical experiments was performed for
several numbers of particles, and the rms error of these experiments is plotted
versus the number of particles in Figure 5.2. The characteristic law of —1/2 is
observed.
It is evident from these results that to get a reasonable accuracy, large numbers
of particles are necessary.
Note also that the sampling interval is important in the presentation of the
solution. In Figure 5.3 we plot the results for sampling increments of dx = 0.073
and dx = 0.292 for 5000 particles spread over 0 < x < 3.5.
In the field of incompressible flows, the random-walk method was the first
numerical technique to incorporate in a consistent way viscous effects while
not limiting the adaptive Lagrangian character of vortex methods. Since its
inception in 1973 it has served the scientific community as a computational tool
for the simulation/modeling of unsteady flows around complex configurations.
These simulations have shown that a vortex method that uses the random-walk
method can reproduce the global quantities of the flow in a consistent way. In
that respect, a simple accuracy criterion is given by the evolution of the angular
impulse J |x|2o;(x) dx, which, for the Navier-Stokes equations, must increase
proportionally to the viscosity and the total circulation. Random-walk methods
can reproduce this law with a reasonable accuracy.
Note that, unlike in grid-based methods, the Reynolds number does not impose directly a limitation to the spacing of the computational elements to ensure
stability. Another interesting feature of random-walk methods is that they are
physically appealing. In particular they yield a natural expansion of the support
of the vorticity.
The possibility of incorporating a consistent treatment of viscous effects
while using a Lagrangian vortex method has led to research efforts in the use
of random vortex methods as a computational tool for direct numerical simulations. Smith and Stansby [188] used the random-walk method in conjunction
with a cloud in cell methodology for the simulation of the flow past an impulsively started cylinder. They demonstrated that the random-walk method can
capture the main features of the vortices developed in the wake and provide
138
5. Viscous Vortex Methods
(a)
(b)
(c)
(d)
Figure 5.1. Random-walk solution of problem (5.2.8). The number of particles used is (a) 500, (b) 1000, (c) 2500, (d) 5000.
5.2. Random-Walk Methods
-1.4
139
- 1 / 2 slope
Random Walk
-1.6
-1.8
-2.0
O
-2.2
-2.4
-2.6
-2.8
2.0
2.5
3.0
Log N
3.5
4.0
Figure 5.2. Convergence study for random-walk solution of problem (5.2.8). Sampling every 20 points, v = 10 4 , St = 0.1,
T = 10.
140
5. Viscous Vortex Methods
0.35
0.30
-
Figure 5.3. Random-walk solution of problem (5.2.8). The variation of results is due to sampling interval change.
5.3. Resampling Methods
141
reasonable estimates for quantities such as the forces experienced by the body
and velocities in the wake. As perhaps could have been expected, the accuracy
of their simulation increases in the later stages of the evolution of the flow
as convective effects become more dominant. In the earlier stages, when viscous phenomena near the surface of the body induce large friction forces, the
method seems inadequate to capture quantities such as the drag coefficient or
instantaneous vorticity values.
Sethian and Ghoniem [185] conducted a systematic study of the randomwalk method combined with the vortex sheet method (see Subsection 6.3.2)
in simulations of the flow past a backward-facing step. Their two-dimensional
simulations showed a convergence of the method in capturing quantities such as
the eddy size and the average velocity profiles in close comparison with related
experimental findings. These results demonstrated the ability of the method to
model turbulent flows. The engineering community has extensively used vortex
methods to obtain estimates of the flow field on a wide variety of applications
such as estimating wind loads on buildings and bridges, hydrodynamic loads
on offshore structures, and mixing in internal combustion engines.
However, because of their low convergence rate, random-walk methods that
use a small number of elements should be viewed as providing a model of the
flow, rather than an approximation of the Navier-Stokes equations. One of
the drawbacks of the method is that it actually does not offer many degrees of
freedom if one wishes to improve its pointwise accuracy. This lack of pointwise
accuracy is probably responsible for the difficulties of this method in three
dimensions. For three-dimensional flows, indeed, as we already mentioned,
it is crucial to preserve a reasonable topology of the filaments, which can be
guaranteed only if there is a good control of the accuracy everywhere in the flow
and not only in the average. We will see how other Lagrangian methodologies
can alleviate this difficulty. Finally the approximation of diffusion by random
walk also implicitly affects the accuracy in the convection, as it makes regridding
strategies difficult to implement in order to correct the effects of the flow strain
on the particle distribution (this will be more apparent in the discussion in
Chapter 7).
5.3. Resampling Methods
Resampling methods were originally proposed as an alternative to random-walk
methods with possible higher accuracy. They were introduced in 1983 [66,169]
in the context of a viscous splitting algorithm and are based on the integral form
of Eq. (5.1.2) of the explicit solution of the diffusion equation.
142
5. Viscous Vortex Methods
Simulations of viscousflowsthat use the resampling technique are performed
with a fractional step algorithm. Each step consists of the following two substeps:
1. Move the particles to simulate the advection part of the vorticity equation.
2. Simulate the diffusion by resampling the vorticity field induced by one particle on its neighbors.
Unlike the random-walk method, in resampling schemes diffusion is simulated
by a change in the strength of the particles and not their locations.
In this and the following section, we will consider particle approximations
of the vorticity field while distinguishing between the values of circulation
and vorticity at the particle locations. We recall that particle circulations are
obtained by multiplying vorticity by the volume of the particle. In contrast with
random-walk methods, which can be defined only in terms of circulations, the
algorithms we describe can be stated in terms of local vorticity values as well.
Assume that at time step tn the vorticity particle distribution is given by
<» h(x, tn) = Y,
VPK8
lx " xkp^}'
t5'3-1)
In this formula, vp are the volumes of the initial particles - or equivalently the
weights of a quadrature formula for which these particles are used as integration
points - that, in the case of a divergence-free flow field, are time independent
and of are the local values of the vorticity at time tn at the particle locations
[x'fe)].
We solve for the diffusion equation with the vorticity field coh(-,tn) as the
initial condition. We recall that the solution of the diffusion equation may be
expressed as
coh(x,tn+l) =
[g(x-y,v8t)coh(y,tn)dy,
where Q is the diffusion kernel [given by Eq. (5.1.3) in two dimensions]. Substituting Eq. (5.3.1) into the above equation and evaluating it at the (unchanged)
particle locations, we obtain that
Formula (5.3.2) is the induction rule that allows us to update the particles
weights from one time step to the next.
5.3. Resampling Methods
143
This method, although quite natural, has the drawback of not conserving the
total circulation. In order to obtain a conservative scheme we use the property
of the heat kernel
J
G(x-y,v8t)dy =
so that we may also write
coh(x,tn+i) = a)h(x,tn)+ / <?(x-y, vSt) [coh(y, tn)-coh(x, tn)]dy.
Substituting now Eq. (5.3.1) into the above equation and evaluating it at the
particle locations, we obtain a conservative scheme for updating of the particle
strengths as
~~
(5.3.3)
This last equation can be interpreted as the result of a balance of the vorticity
received by and expelled from a given particle during one time step (see [112]).
It can also be rewritten as
\tn) -xhq(tn),
v8t]
The term within braces on the right-hand side can be seen as a quadrature error
based on the particle locations for the Gaussian function. It is therefore arbitrarily small, which shows that formula (5.3.3) is actually only a correction over
formula (5.3.2).
The convergence of the method based on Eq. (5.3.2) has been proved in
Refs. 66, 67, and 68. The modified scheme of Eq. (5.3.3) can be proved to be
convergent by similar arguments. Not surprisingly, an essential ingredient in the
convergence proof is that particles overlap enough to give a correct sampling
of the Gaussian kernel. This condition may be written as
h «; \fvbt.
At first glance, this condition contradicts the usual stability condition (v8t <
Ch2) for explicit time discretization of diffusion equations. However, the parameter St is the splitting time step, and not a diffusion time step, so that actually
v and 8t should not be seen here as independent parameters. This point will be
further discussed below.
144
5. Viscous Vortex Methods
5.3.1. Other Resampling Schemes
Other resampling methods have been more recently proposed. First it has been
observed that the Gaussian function Q, which may be expensive to calculate,
can be replaced in Eq. (5.3.2) or (5.3.3) with any cutoff function r\e with radial
invariance and sharing with Q the following moment properties:
frj(x)dx=l,
I xfrj(x)dx
= 2,
i = l,2,
(5.3.4)
provided the parameters s and St are linked through the relation s1 = v8t.
In other terms one can use the numerical dissipation involved in the successive regularization of the particles into blobs of shape r\e to simulate the
physical diffusion. These regularizations, when properly scaled, do provide the
right amount of diffusion. One can view Eq. (5.3.2), with Q replaced with rj as
the discrete analog, through quadrature rules of
con+l =
rie*con.
A Taylor series expansion of of by use of the symmetry properties of rj readily
shows that, under assumptions (5.3.4),
rie*con = con+ £2Acon + 0{sA).
Setting s2 = v8t, we thus obtain the right scaling to perform a time step of
the diffusion equation. Note that by choosing rj to be a Gaussian and the above
scaling we recover Eq. (5.3.2).
In practice one keeps e fixed (and more or less equal to the cutoff parameter
used in the computation of the velocity for the Euler step) and varies 8t as a
function of v. Note that if v decreases, one can use only a few splitting steps
(zero if v = 0!). It thus may become important to use a different time stepping
for advecting the particles in the numerical integration of the Euler equations
(in other words to perform several Euler substeps for one diffusion step).
We will not get into more details about this resampling technique. We will
see in Section 5.4 that this class of methods can be viewed as resulting from a
particular time discretization within a more general class of deterministic methods, and we will gather in Section 5.4 numerical illustrations corresponding to
the various possible approaches.
Another resampling method, proposed in Ref. 157, consists of redistributing
the vorticity on particles located on a uniform grid. This can be done to prevent
numerical discrepancy resulting from an excessive distortion of the Lagrangian
grid. However, this scheme is not conservative, and it is more advisable to
decouple the viscous resampling and the regridding steps. Another possibility
to avoid accuracy problems due to the distortion of the Lagrangian grid while
5.4. The Method of Particle Strength Exchange
145
keeping advantage of the localization feature of vortex methods is to homogenize the grid by moving randomly each particle within a square of size h before
resampling (see Ref. 37 for the convergence proof of a method in this spirit in
which resampling is done with a completely random choice).
All these methods, except the last one based on random rezoning, are second
order in space. Their time accuracy is limited only by the splitting of the NavierStokes equations. This means that a high-order splitting method, like the one
analyzed in Ref. 24, which alternates half steps of advection and diffusion,
virtually yields second-order methods.
5.4. The Method of Particle Strength Exchange
In this section we derive a general framework for the construction of high-order
viscous algorithms for vortex methods introduced by Mas-Gallic in 1987 [147].
The starting point is the Lagrangian description of the Navier-Stokes equations as approximated on the particle locations:
^
= vAov
(5.4.1)
The goal of the method is to derive formulas for consistent evaluations of Acop
on the particle locations.
5.4.1. Design
The key idea is to replace the diffusion operator by an integral one. The links
between integral and diffusion operators have long been exploited in thefieldof
kinetic equations, but in general in the other direction, namely, to derive a diffusion approximation of integral operators that model collisions of particles. The
motivation here is that integrals are much better suited for particle methods than
second-order differential operators: As already observed on many occasions,
inserting particles inside an integral is indeed equivalent to writing a numerical
quadrature of this integral.
Let us now describe in detail the resulting methods. Let r\ be a kernel satisfying the following moment properties:
/ XiXjf](x) dx = 28(j
for /, 7 = 1,2,
/ x[]xi22r](x)dx = 0 if i! + / 2 = 1 or 3 < i{ + i2 < r + 1,
[\x\r+2\r](x)\dx<oo.
(5.4.2)
146
5. Viscous Vortex Methods
For e > 0 we set r)£ (x) = s~2rj(x/s) (recall that we consider the two-dimensional
case; here and subsequently appropriate modifications need to be done for three
dimensions). We then consider the integral operator A£ defined by
A£co(x) = s~l / [co(y) - co(x)] r]£(y - x) dy.
(5.4.3)
This provides an integral approximation of the Laplace operator according to
the following result.
Proposition 5.4.1. Under assumptions (5.4.2), if co e Wr+2'P(R2) for some
/? € [1, +oo], then the following estimate holds (with the notation defined in
Appendix A):
\\A£co - Aco\\0,p < CV|Mlr+2, P .
(5.4.4)
Proof. Let us check this assertion only for p = +oo. The Taylor expansion of
co at the point x to the order r + 2 yields
co(y) = co(x) + (y - x, V)tw(x) + • • • +
+ O(|y-xr +2 |H| r+2 , oo ).
— (y - x, V) (r+1) o;(x)
(r + 1)!
When this expansion is used on the right-hand side of Eq. (5.4.3), by assumptions (5.4.2), the contributions of all the terms of the form /(y-x) Q '^ e (y-x) dy
vanish except for the terms
d2co
f
7
d2co
f
\y -x\r+2r]£(y-x)dy
9
/ (y2 - x2)zr]£(y - x) dy
J
— T(x) / (yi -x{yri£(y-x)dy+— T(x)
dxf
J
dx$
1
,
which, after the change of variables z = [(y - x)/e] in the integrals, yields
A£co(x) = Aco(x) +
0{sr).
Particle approximation of the diffusion can then be defined from numerical
integrations of A e . The resulting scheme is written as
coh(x, t) = Y, vpcohp(t)8(x - xhp),
(5.4.5)
where the trajectories of the particles xh are computed with the velocity field
5.4. The Method of Particle Strength Exchange
147
K£ • coh and cohp(t) obey the following system of ODEs
£
Concerning moment conditions (5.4.2), let us first observe that, for symmetry
reasons, any function r\ with radial invariance would satisfy
j
f
/ xtri(x)dx=
f
/ x\x2rj(x)dx = 0,
J
r
/
x*ri(x)dx== / X2T](x)dx
Jj
and thus would provide, on proper rescaling, a kernel satisfying conditions
(5.4.2) for r = 2. Several constructions of the kernel ij are proposed in Ref. 73.
They in particular relate moment conditions (5.4.2) to the cutoff conditions determining the accuracy of vortex blobs in inviscid calculations (see Section 2.4).
One possibility is to use
If f is a cutoff of the order of r, then it is straightforward to check that r\ satisfies
conditions (5.4.2) with the same value of r. This choice was later rediscovered
by Fishelov. However, Fishelov's scheme, which is derived in Ref. 83 from the
approximation Aco ~ co • A£ e, is given by
Therefore it does not incorporate the correction term — cop Ylq vq A£e (x£ — x^),
which in Eq. (5.4.5) implicitly results from the integral approximation approach. Like the resampling scheme of Eq. (5.3.2), it therefore fails to be conservative.
Another systematic construction of arbitrarily high-order kernels consists of
using the formula
(5.4.7)
If f satisfies the cutoff moment properties at order r (in the sense of Section 2.3),
then it is readily seen that rj satisfies Eq. (5.4.2) at the same order. For a cutoff
148
5. Viscous Vortex Methods
with radial symmetry, as is most often the case, this formula gives
It is noteworthy that, if one starts from the Gaussian kernel Q(x) = (4n) l
exp(—|x| 2/4), the above construction gives rj = Q. For a more general presentation of these methods and their extension to anisotropic diffusion, we refer to
Ref. 73.
One advantage of the PSE schemes just described over the resampling methods introduced in Section 5.3 is that their definition does not require any viscous
splitting of the Navier-Stokes equations. The time discretization of Eq. (5.4.6)
can be done through classical time-stepping schemes, leading to a method that
can be virtually of any order in space and time, provided the proper choice of rj
is made. It is, however, interesting to note that, if system (5.4.6) is discretized
by the explicit forward Euler scheme with a time step 8t, one advances from
time tn = n8t to time tn+\ by
/i+l
n
v8t
ST
( n
n\
( n
n\
which is the resampling scheme of Eq. (5.3.3), with rj instead of Q and e2 = v8t.
As stated in Section 5.3, resampling schemes can thus be seen as a particular
low-order time discretization of PSE schemes. Finally, as we will see in Subsection 5.4.3, the PSE schemes can also be formulated for spatially varying s.
5.4.2. Numerical Analysis
Before sketching the analysis of these methods in the linear case, let us point
out the particular role played by nonnegative even kernels r\. For this class of
kernels, one can easily check that the algorithm is unconditionally enstrophy
decreasing, which is what can be expected for the Navier-Stokes equations in
the absence of boundaries.
If we indeed define by £h(t) = J2P vp\c°hp(t)\2 a discrete version of the enstrophy £(t) = J \to(x, t)\2 dx, we get from Eq. (5.4.6)
Writing then oop = \ (cop + coq) + \ (cop — coq) and observing that, by symmetry,
since rj is even, the contribution of the first term in the sum is zero, we obtain
5.4. The Method of Particle Strength Exchange
149
provided that 77 > 0. Furthermore it can be shown (see Ref. 62) that, on reinitialization of the particle distribution to guarantee the overlapping of particles
for all time, the discrete enstrophy has the same decay property as for the
continuous equation, that is,
£h(t) < - ,
vt
where C depends on only the initial vorticity.
The drawback of nonnegative kernels is that they are second order only, as
the moments of order 4 cannot vanish.
We give now the main steps of the convergence analysis in the linear case
for general diffusion approximations (we refer to Ref. 73 for details). We focus
again on the linear convection-diffusion equations (5.2.4) and (5.2.5), and we
assume that the initial particle distribution consists of particles located at the
nodes of a uniform grid of mesh size h.
We first give some notation: Sv(t), and S^(t) will respectively denote the
linear operators that give the solutions, at time t, of Eq. (5.2.4) and of the same
equation with A replaced by Ae (susequently referred to as the Ae equation).
We first observe that
Asco = e~2{o) * rje — Xco),
where X = J rj(x) dx. This implies that, for all p e [1, 00],
HAfitt>||L, <Ce- 2 |M| L / >,
(5.4.9)
and the A£ equation immediately yields
We thus obtain a finite bound for the enstrophy (for finite times) only if
vs~2 = 0(1). As a result, the Ae model and the particle method that has
been derived from it, must be seen as a vanishing viscosity model (however, if
r\ > 0, it does provide a valid approximation for fixed v and £ ->• 0).
From now on we assume that the parameter e is linked with v by
vis1 % 0(1).
(5.4.10)
If we subtract the A£ equation from Eq. (5.2.4) and use relation (5.4.4), we
obtain, under the assumptions of Eq. (5.4.2) and provided that Svcoo is smooth
150
5. Viscous Vortex Methods
enough (COQ e W r + 2 o ° is actually a sufficient condition),
d(Sve-Sv)coo , J: ,
y
e
dt
- Sv)co0] - vA£[(Sv£ - Sv)w0] =
0{vr/1).
We now use relation (5.4.9) and approximation (5.4.10) together with the stability properties of the advection equation to deduce, for t < T,
\\Sv£(t)co0 - Sv(t)a)0\\LOO < C{T)vr/1.
(5.4.11)
The Ae equation can thus be viewed as giving the [r/2] first terms in an
asymptotic expansion, with respect to v, of the solution to the convectiondiffusion equation with small viscosity. This result easily extends to the nonlinear Navier-Stokes equations (one must then use the elliptic regularity properties
stated in Section A.3 to deal with the nonlinear terms in the advection equation).
Let us now continue our analysis and in particular investigate the effect of
the particle approximation itself. To denote the particle approximation of Ae
on the moving particles, let us set
A£,h,t0) = s~2 ] P vp{co[xp(t)] - co(x)}rie[xp(t) - x],
p
where the subscript h refers to the particle discretization and co = Svtoo, co£ =
S^coo. We also define
ep(t) =cop(t)
-cae[xp(t),t].
By subtracting Eq. (5.4.6) from Eq. (5.2.4), we obtain
—- = (A £-A^hj)cos[xp(t),t]-\-v8~2^2vq(eq-ep)r]£(xp-xq).
(5.4.12)
q
We next observe that the definition of the particle paths X together with a
straightforward application of the quadrature error estimate (A. 1.3) allows us
to write
&e,h,tcoe(x) = s~2 f {(oe{X(t\ y, 0)] - a>e(x)}rfc[X(f; y, 0) - x] dy
+ O(hm£-m-2)
= A£co£(x) + O(hm£-m-2).
(5.4.13)
This estimate is actually valid on suitable smoothness assumptions on cos and
5.4. The Method of Particle Strength Exchange
151
on the particle paths X, which in turn respectively follow from the smoothness
of too and the velocity field a.
We also note that
vq(eq -ep)r]£(xp
-xq)
q
vq\r]£{xq -xp)\
\r](x)\dx+O(hms-m)\
< max \eq\
(5.4.14)
.
Combining relations (5.4.12), (5.4.13), and (5.4.14) thus leads to
M O I <C \hms-m + (l+hme-m) [ max\ep(s)\ds\ .
L
^o
P
If the usual overlapping condition h < £ is met, this shows, by Gronwall's
theorem, that
max |gp(01 =
p
O(hms~m).
It remains to recall relation (5.4.11) to obtain the error estimate (stated in terms
of v for convenience):
- co[xp(t),
max |
t]\ =
O(vr/2
p
This result is the expected convergence result for the semidiscrete particle
method. Let us now briefly comment on the stability requirements for the fully
discrete algorithm, and in particular the already mentioned explicit first-order
time discretization (5.4.8) of Eq. (5.4.6). Under the scaling v = Cs2 one easily
deduces from Eq. (5.4.8) that
max \copn+l I < max \copn
p
p
vq\r]E(xq
C8t
-xp)\
L q
< max \conp\{\ + CSt[k +
O(hms-m)]}.
This shows that the algorithm is stable, provided that h = O(e). Now if one
152
5. Viscous Vortex Methods
uses nonnegative cutoff, which allows for smaller values of £, one gets
< max \co
max
p
'
y
if
vhte'1
- xp) < 1.
(5.4.15)
Since
Xg -xp)
~ A =
rj(x)dx,
(5.4.16)
relation (5.4.15) is a stability condition similar to that found in finite-difference
methods. However, if one uses relation (5.4.15) to choose the maximal time
step allowed, one has to be careful that, in the absence of remeshing, £ \ v q \ ij£
(xq — xp)\ can significantly differ from X in parts of the flow where particle
spacings get highly distorted, e.g., around stagnation points. Of course at these
points the accuracy of the algorithm is questionable (the apparent conflict with
the error estimates comes from the fact that, as in the inviscid case, these estimates involve constants that depend, in particular, on the smoothness of the
flow map; these constants can grow exponentially in time), and local regridding
is certainly necessary. However, it may be desirable to have a method that at
least does not blow up in these situations and does not require choosing a time
step much smaller than needed in the rest of the flow. One way suggested in
Ref. 62 is to modify PSE scheme (5.4.8) into
( 5 A 1 7 )
In this formulation the algorithm is stable under the condition
v8ts~2X < 1.
5.43. PSE Schemes with Variable-Size Blobs
The PSE methodology has enough flexibility in dealing with viscous effects
to allow the treatment of variable viscous scales in the vorticity redistribution
scheme. The use of variable-blob size has already been considered in the inviscid case (see Subsection 2.6.3). The underlying idea is that one may wish to
5.4. The Method of Particle Strength Exchange
153
use fewer particles and thus reduce the computational cost in zones of the flow
where vorticity gradients are small, for example in the far wake behind obstacles. This can be done through merging of nearby vortices or, more generally,
by periodically remeshing the particle distribution on a variable size mesh.
As we have seen above, a consistent treatment of the diffusion requires the
overlapping of the particles on a scale given by the kernel used in the PSE
formula. As a result, a locally coarser particle resolution must go with an increasing diffusion range s. The simple recipe used to incorporate variable blobs
in the Biot-Savart law [Eq. (2.2.13)] would consist of replacing s with e(y) in
definition (5.4.3) of A£. However, this technique would not be consistent. The
reason is that, if one follows the argument developed in Subsection 2.6.3, the
Taylor expansion of s would bring new terms in the factor of the second-order
moments of the cutoff rj.
The correct way to implement a variable-blob size in a PSE scheme is through
a change of variables mapping the variable grid to a uniform one. For simplicity
let us focus on the one-dimensional case. We denote by x, y locations in the
physical space, with variable grid size, and by x, y locations on the mapped
coordinates, where the grid size is uniform. We assume that the mapping is
given by the formulas
x = f(x), x = g(x), co(x) = cb(x).
Writing derivatives in the mapped coordinates yields
d2co
d \
deb]
where h(x) = gf(x). Next, we use the following integral approximation, the
proof of which relies on Taylor expansions at second order similar to those in
the proof of relation (5.4.4):
d
—
\
dcb~\
_o f h(x)
m j cJ) —
~e
/
dx [
dx\
J
, ..vy/
2
„
, ~
[<JO(X) — co(y)\r)[
yJn
'\
.
y
e
)
dy.
In the above formula, the kernel r) satisfies the moment properties of Eqs. (5.4.2)
and 8 is a constant blob size. This leads to the following PSE scheme for the
heat equation in one dimension with v = 1:
dcop
~1T=£
_3
. v - ^ - h(xp) + h(xq)
"h(xp)\vq
^—
-(co q-cop)r][
(xp-xq\
,
/-/I1O.
(5.4.18)
154
5. Viscous Vortex Methods
where vq denote the volumes of the mapped particles. Note that the volumes of
the physical and the mapped particles are related through the Jacobian of the
mapping:
vq = vqh(xq),
which establishes that scheme (5.4.18) is indeed conservative. To extend this
approach to two- or three-dimensional flows, one must handle integral approximations of differential terms involving diffusion tensors. We refer to Ref. 73
for general formulas to deal with this case.
In complete convection-diffusion problems, the use of variable-blob sizes
must be combined with regridding techniques, such as those designed in
Section 7.2, to make sure that the particle discretization is everywhere consistent with the local blob sizes. The overlapping condition needed to derive
Eq. (5.4.18) in particular requires that the frequency of regridding is such as
to deter particles in the low-resolution regions from traveling too far in the
high-resolution zones.
5.4.4. Results
In order to illustrate the particular aspects of the method and to compare its
advantages and drawbacks with the random-walk method, we consider first
the one-dimensional initial boundary-value problem for the diffusion equation
described by Eqs. (5.2.7) and (5.2.8). In Figure 5.5 we present the rms error
by the PSE scheme for which a Gaussian kernel is used. Comparing with the
respective results obtained by using the random-walk method, we can clearly
observe a 2-order-of-magnitude improvement in the results of the present calculations. Note that in this case the particles remain uniformly distributed. For
convection-diffusion problems, the accuracy of the PSE scheme to handle diffusion is based on the ability of the method to approximate the Laplacian operator
on the irregular particle locations, while providing a natural way for the diffusive
expansion of the support of the vorticity field. Unlike the random-walk method,
resampling schemes and the method of PSE require that particles overlap at all
times and that ghost particles always surround the vorticity-carrying elements
to provide a natural expansion of the vorticity field. We will see in Section 7.1
how regridding techniques allow us to accommodate these constraints.
Our next illustration deals with the merging of two like-signed Gaussians
subject to an axisymmetric strain field. Figure 5.5 is a comparison of a PSE
scheme and a spectral finite-difference calculation of Buntine and Pullin [38].
The good agreement between these results confirm that PSE methods give an
5.4. The Method of Particle Strength Exchange
• T
1
o
155
- exact soln.
numerical soln.
-
0.3
\
/
t-
-
x 0.2
3
0. 1
/
0 (J
^s.
i
i
b=©
^*—-o-—<q
2
x
Figure 5.4. PSE solution of problem (5.2.8) with 50 equidistant particles.
©
Q
156
5. Viscous Vortex Methods
0.03
0.06
0.09
(a)
Figure 5.5. Comparison of (a) a spectral calculation by Buntine and Pullin [38] and (b) a
PSE calculation of the merging of two Gaussians Reynolds number V/lnv = 640.
5.4. The Method of Particle Strength Exchange
157
Figure 5.6. Vorticity contours of vortex shedding behind a circular cylinder at Re = 200,
using a variable blob vortex method.
accurate treatment of the diffusion. Illustrations of PSE schemes for threedimensional flows will be given in Chapters 6 and 8.
Ourfinalexample illustrates theflexibilityof PSE schemes to handle variable
diffusion scales. Vortex methods are very well suited for external flows because
they allow an exact treatment of the far-field conditions and their computational
effort is restricted to vortical zones of the flow. They can be made even more
efficient if one can take advantage of the decay of vorticity gradients in the
wake to save computational elements. This can be done by using the methodology explained in Subsection 5.4.3. In the case of a wake behind a cylinder,
shown in Figures 5.6 and 5.7, the blob size is proportional to the distance to
the center of the obstacle. Particles are mapped to a uniform mesh through the
mapping (x, y) -> (rr = log r, 0) where r, 0 are the polar coordinates. In the
mapped coordinates the diffusion is given as Aco = r~2Ar>^cb which allows
us to use simple PSE formulas. Figure 5.6 shows the classical development of
a Karman street in the wake for a Reynolds number of 200. Figure 5.7 shows
the corresponding particle locations. The total number of particles in the last
picture is approximately 6,000.
The efficiency and the simplicity of the variable-blob approach in this flow
results from the fact that there is a natural global mapping that accounts for the
scales that are to be resolved. For more complex geometries, it is possible to
combine several local mappings, corresponding to different parts of the flow.
Figure 5.8 gives an example in which particles around each cylinder have volumes given by r2drd0, whereas in the intermediate zone they have uniform
volumes. The grids shown in the figure illustrate the resolution of the particle
distribution (for clarity it corresponds to 1 /4 of the actual resolution used in
this computation), but of course particles are present only in the support of the
vorticity.
158
-2
5. Viscous Vortex Methods
10
22
Figure 5.7. Particle locations for vortex shedding behind a circular cylinder at Re = 200.
34
5.5. Other Redistribution Schemes
159
Figure 5.8. Simulation of flow past a pair of circular cylinders (Re = 400) through the
combination of several local mappings.
5.5. Other Redistribution Schemes
We describe here two additional schemes in which the diffusion is approximated
by redistributing the vorticity among neighboring particles.
5.5.7. Russo's Triangulated Viscous Vortex Method
The method we now describe is in the spirit of the triangulated vortex method
that will be described later in Chapter 7. It has been introduced by Russo [174,
175] as a deterministic alternative to the random-walk method and is based on
the observation that a particle method can deal with viscous terms as soon as
one is able to project second derivatives of Dirac masses onto particles. This
can be done in an elegant way by use of the weak formulation of derivatives.
More specifically, let us denote by 0 a test function vanishing at the boundary
of the computational domain and consider a single particle, located at x p and
160
5. Viscous Vortex Methods
denoted by 8Xp. From the identity
one can deduce
if one is able to write
-]Tc^0(x,).
(5.5.1)
Relation (5.5.1) can be seen as a difference formula for the Laplacian on the
Lagrangian mesh (x^). Such a formula can be established once a triangulation
linking the particles is built, in a way that is reminiscent of the procedure used in
the so-called free Lagrangian method [86] (the method also bears some analogy
to finite-volume techniques). Following Ref. 174, we focus on triangulations
resulting from a Voronoi diagram (we postpone to Section 7.1 a more complete
description of this technique). In this case, each particle x^ lies in the center of
a cell Pp, and the triangles are obtained by linking particles in connected cells
(see Figure 7.2 in Chapter 7). To obtain relation (5.5.1), the idea is to introduce
fluxes through integration by parts, by writing
\Pp\A<t>(xp) ~ [ A(j>(y)dy
J
/
where \PP\ denotes the cell area (or volume in three dimensions). The normal
derivative on the right-hand side above is then approximated by finite differences across the corresponding cell edge:
JdPn $n
(y)dy ~
where the notation ~ means that the sum is restricted to the particles in adjacent
cells and lpq denotes the length of the common edge (or, in three dimensions,
the area of the common face) to the cells centered in x^ and xq.
Formula (5.5.1) follows then with
\Pp\r~q | X/,-x,.| P
4
The diffusion scheme that arises from formulas (5.5.1) and (5.5.2) now is
5.5. Other Redistribution Schemes
161
given by
where particles are advected by the local velocity and circulations are updated
with
dTn
x
"
dt
(5.5.3)
From Eq. (5.5.2) it is readily seen that
from which results the conservativity of scheme (5.5.3). The scheme is also
enstrophy decreasing: if one defines the enstrophy with the formula
where vp are the time-independent volumes of the particles (not to be confused
with the varying cell volumes), then
E
By using elementary tools from linear algebra (in particular Gershgorin theorem) and formula (5.5.2), we readily see that the matrix [apq] has only negative
eigenvalues, implying that the right-hand side above is negative.
Compared with resampling methods devised earlier, this method avoids the
introduction of blobs for the diffusion equation, thus bypassing the quadrature
error and the associated overlapping condition. However, its applicability has
been hampered so far by difficulties with stability. Indeed, an explicit Euler
time discretization of Eq. (5.5.3) with time step 8t would yield
rn+l=rnp(l-v8tapp)+
J2
a
P« rr
<5-5'4)
q~-p,q^p
Since apq > 0 for q ^ /?, this scheme is stable if one can check that, for all /?,
vStapp < 2,
or, equivalently,
8t <
pq±P
|x
" x^
162
5. Viscous Vortex Methods
In view of the incompressibility of the flow, one can assume that the cell volumes remain of the order of the particle volumes vp, say h2 (in two dimensions).
If the particle distribution is uniform, then lpq and \xp — xq\ are of the same
order and the stability condition is similar to that obtained for explicit time discretization of finite-difference schemes. However, if the flow strain elongates
the cells, making lpq large compared with \xp —x q\, the condition may lead to
drastic time-step restrictions. Note that the same difficulty has been mentioned
for PSE schemes. The remedies suggested at this time [namely correction algorithm (5.4.17) and/or remeshing strategies] would be difficult to translate into
the present scheme. Remeshing in particular would affect the cost of the construction of Voronoi diagram, which can be limited to O(N) operations insofar
as it is only locally updated at each time step.
Russo [174] presents an implicit alternative to Eq. (5.5.4). The resulting
scheme is unconditionally stable but requires the inversion of a matrix that,
as a consequence of particle distortion, can become highly irregular. The experiments reported in Ref. 174 show that a conjugate gradient approach to the
solution of the linear system that must be solved at each iteration leads to a
considerable computational overhead over the repeated cost of the construction
of the Voronoi diagram.
5.5.2. The Redistribution Scheme of Shankar-van Dommelen
This scheme [186] consists of updating at each time step the circulations of the
particles with the formula
rn+l = V rn fn
l
p
Z^
q
qJpq>
(5 5 5)
KJ.J.J)
where f^q represents the amount of vorticity to transfer through diffusion between particles during a time step 8t. The influence range, which determines
the number of particles involved in the above sum, is taken of the order of
^/v8t. The parameters / ^ are computed at each time step in order to satisfy
the following constraints:
(5.5.7)
(5.5.8)
5.5. Other Redistribution Schemes
163
The superscripts / and j indicate the component indices. Because of Eq. (5.5.6),
scheme (5.5.5) can be rewritten in a PSE setting as
and conditions (5.5.7) and (5.5.8) can be seen as a discrete version of the firstand the second-order PSE conditions in Eqs. (5.4.2). The numerical analysis
follows along the same lines and reveals that the method is second order.
It is interesting to remark that the method is reminiscent of an earlier version
of the adaptive method of Strain that we will outline in Chapter 7. In this method
[190], proposed in the context of inviscid flows, the volumes of the particles are
processed at each time step in such a way as to decrease the quadrature error in
the calculations of the particle velocities. This is achieved by constraining the
quadrature rule to be exact for the Biot-Savart kernel multiplied by polynomials
up to a given degree. Transposing this idea in the context of PSE schemes, with
a second-order PSE kernel instead of the Biot-Savart kernel, would precisely
lead to discrete moment properties (5.5.7) and (5.5.8).
The present method also bears some similarity with the triangulated method
discussed earlier in this section in that it relies on only particle quantities without resorting to any a priori cutoff functions and the associated overlapping
constraints; as far as viscous effects are concerned, it is thus potentially free of
any remeshing need. Reference 186 reports results for flows around an impulsively cylinder that compare well with the results obtained by the PSE method
(see Chapter 6).
This method, however, carries some limitations and uncertainties. For stability reasons the amount of transfered vorticity has to be positive, which precludes the higher-order momentum properties that would be necessary to obtain
higher-order schemes. Moreover system (5.5.6)-(5.5.8) is most likely either underdetermined or overdetermined, depending on the number of particles in the
diffusion range of a given particle. In the former case, the authors use a linear
programming technique to determine a solution, which results in a significant
computational overhead. The results given in Ref. 186 indicate that the computation of the fpq more than doubles that of the velocity evaluations, whereas,
in PSE schemes, the diffusion evaluation, even when combined with a remeshing procedure, has a relatively minimal (~2% of the convection step) cost. In
the proposed redistribution scheme (second case) it is necessary to insert new
particles, thus reintroducing remeshing but in a less clear-cut way than through
the interpolation techniques devised in Chapter 7.
164
5. Viscous Vortex Methods
5.6. Subgrid-scale Modeling in Vortex Methods
Subgrid-scale modeling is commonly associated with the concept of Large Eddy
Simulations (LES). Its need stems from the fact that, while one is generally interested in only large-scale structures of theflow,because of the nonlinearity of
the Navier-Stokes equations, one cannot ignore the effect of the nonresolved
small scales.
In grid-based methods, small scales must be explicitly parameterized in order
to allow energy transfers to and from large scales. In contrast, vortex methods
do not involve any minimal scale in their dynamics and have the ability to allow small scales to proliferate. This is particularly clear in the example of the
evolution of a single filament subject to stretching and folding. The creation of
small loops and hairpins is the signature of small scales appearing in the course
of the calculation.
One may wonder whether these microstructures are physical or merely numerical artifacts. On the one hand, the fact that vortex methods solve exactly
the inviscid equations pleads in favor of the former interpretation. On the other
hand, one may argue that round-off error can at least partially trigger these small
scales, suggesting a numerical artifact. The important practical issue is actually
that, no matter how relevant the small scales produced in a vortex calculation
are, their accurate resolution would require an increasing number of points,
eventually driving the computation to overwhelming computational costs.
A natural action to overcome this difficulty is to remove, or at least control,
the developing microstructures, hopefully without affecting the significant large
scales. We describe in this section two approaches to address this issue.
The first one consists, in the context of inviscid three-dimensional filament
calculations, of modeling dissipation effects by locally modifying the topology
offilaments.This covers thefilamentsurgery techniques introduced by Leonard
[134] and the hairpin removal algorithms of Chorin [52, 53]. In the second approach, dissipation is explicitly introduced to remove small scales. In this class
of methods we describe the core expansion technique and a more recent turbulent viscosity model derived within the framework of PSE schemes [64].
5.6.1. Filament Reconnection and Hairpin Removal
In a vortex filament calculation, nearby filaments may attract each other until the corresponding numerical vortex tubes overlap, eventually canceling the
overall vorticity. Filament reconnection is a way to mimic viscous effects, on
the scale of the filament separations, to reconnect the filaments on the basis
of their combined vorticity field. Reconnection can also take place within a
single filament whenever it creates entangled loops. Similarly, a single filament
5.6. Sub grid-scale Modeling in Vortex Methods
165
submitted to stretching can fold on itself, producing small hairpins. Rather than
refining the filament discretization to resolve these hairpins, which presumably
do not contribute to the large-scale features of the flow, it is advisable to remove them. It is interesting to observe here that the concept of hairpin removal
was first discussed by Feynman in 1957 [82] in the context of turbulent flows
in superfluids. In Figure 5.9 we sketch Feynman's ideal of the breakup of an
inviscid vortex ring into "rotons."
The procedure suggested by Chorin [52] for hairpin removal consists of considering the angles made by successive segments along each filament. Hairpin
removal takes place whenever this angle goes beyond a certain predetermined
threshold. The two segments are then replaced by their sum, thus reducing the
length of the filament. Conversely, splitting of a filament into two filaments
is done by consideration of the segments along the filaments that are distant
from each other by less than a given threshold (which must be set smaller than
the length of individual segments) and application of the same angle condition. The filament is split into two new filaments by the introduction of two
counterrotating segments. The same strategy can be used for the reconnection
of approaching filaments (in this case distances and angles segments belonging to two filaments are monitored). As noted in Ref. 53, the methods bear, at
least formally, important similarities to the contour surgery techniques devised
for contour dynamics methods (we refer to Subsection 3.2.3 for the analogy
between vortex filament and contour dynamics methods).
Numerical experiments are reported in Ref. 53 concerning the simulation of
vortex rings. They indicate that these procedures allow considerable savings
through the reduction of computational elements while preserving reasonably
well the invariants of theflow.The limitations of the method are in the number
of ad hoc parameters that require tuning (minimum distance, maximum angle,
as well as the frequency of the operation). Also it has difficulties, inherent in
vortex filament methods, in handling Reynolds-number-dependent effects, if
viscous, rather than inviscid, solutions are sought.
5.6.2. The Core-Spreading Technique
This method was originally proposed as an alternative to the random-walk
method to solve the Navier-Stokes equations. It was based on the observation
that Gaussians are explicit solutions to the heat equations and consisted of using spreading Gaussian blobs around the particles while keeping constant the
circulation carried by the particles.
However, this method cannot be used if consistent approximations to the
Navier-Stokes equations are sought, and the core-spreading method should be
166
5. Viscous Vortex Methods
A
G O
id;
(b)
(a)
--
It
Figure 5.9. From Ref. 82: "A vortex ring (a) can break up into smaller rings if the transition between states (b) and (c) is allowed
when the separation of vortex lines becomes of atomic dimensions. The eventual small rings (d) may be identical to rotons."
5.6. Sub grid-scale Modeling in Vortex Methods
167
seen merely as a diffusion model that is valid only in the limit of vanishing viscosity. The reason for this inconsistency is that, for a fixed viscosity value, the
size of the blobs can no longer be considered as a small smoothing parameter.
Because of the strain in the flow, the spreading blobs cease therefore to yield a
consistent approximation of the flow in the advection phase. This was clearly
demonstrated by Greengard [90].
A plausible cure for this inconsistency would be to break the Gaussian cores
after each diffusion step into new particles. This may be viewed as another
version of the resampling schemes described earlier. The prospect of injecting
physical considerations in the evolution of the particle core size has prompted
several research efforts in this topic. These are works presently in progress that
we will not discuss further in this book.
5.6.3. A Turbulent Viscosity Model
We outline here a subgrid-scale model based on a rigorous analysis of the
truncation error involved in vortex calculations.
In the following we denote by () thefilteringoperation resulting from the mollification by a given cutoff. As we have seen in Chapter 3, all three-dimensional
vortex schemes (based on either point particles or filaments) share the property
that, in the absence of time discretization, they satisfy the equation
du
ot
h div (uo;) - (a; • V)u = 0
(5.6.1)
where u is obtained from the particle vorticity field u) through a mollified BiotSavart law. On mollifying Eq. (5.6.1), we obtain the following equation for the
vortex blobs (or vortex tubes, if a vortex filament method is used):
— + divuu? - (a; • V)u = 0.
(5.6.2)
dt
When compared with the Euler equation for the fields u and ZJ, this equation involves a truncation error e that we can split into two terms, ei and e 2,
corresponding to the convection and the stretching terms, respectively:
ei = div ua; — uu?,
e2 = (UJ • V)u - {uj - V)u.
(5.6.3)
(5.6.4)
One may observe that these error terms are reminiscent of the comutation error
resulting from filtering nonlinear terms in the Navier-Stokes equations. These
are the terms that are commonly modeled to obtain the governing equations
168
5. Viscous Vortex Methods
of LES. They account for the transfer of enstrophy (in the case of a vorticity
formulation) between large and small scales.
The fact that vortex methods solve filtered equation (5.6.2) indicates that,
by themselves, these methods realize some kind of turbulence modeling. This
confirms the already mentioned fact that, unlike that of grid-based methods,
their dynamics is not constrained to any minimal scale (beyond the initialization stage, of course). From Taylor expansions that are closely related to those
involved in the derivation of PSE schemes, one can show that, if the cutoff is
radially symmetric, the error term ei can be approximated by
ei — div (u — u)u; + m^s1 div ([Du] Vu;),
(5.6.5)
where s is the cutoff length and ni2 = 1/2 J xf$(x) dx. The first term on the
right-hand side above is an advective term that does not contribute to enstrophy transfers between large and small scales and thus can be disregarded. In
contrast, the second one involves dissipation as well as antidiffusion, as is seen
by consideration of the eigenvalues of the tensor Du: Since div u = 0, the
trace of the tensor vanishes, implying that dissipation in one direction comes
with antidiffusion in a transverse direction (note that in this discussion we have
implicitly assumed that the cutoff has a nonvanishing second-order momentum; if this were not the case, the error term ei would involve a hyperviscosity
tensor).
It is now natural to assert that the antidiffusion (or backscatter, to use turbulence modeling terminology) is responsible for the spontaneous appearance
of microstructures in vortex calculations. In three-dimensional calculations,
hairpins are one particular manifestation of these microstructures, and hairpin
removal can be viewed as a backscatter control device. In two-dimensional
calculations, the amplification of round-off errors in vortex sheet calculations
[130] or in periodic turbulence experiments [64, 100] can be traced back to the
same origin. In vortex sheet calculations, filtering and/or mesh refinement has
been used by Krasny to prevent the appearance of spurious microstructures that
overwhelm the large-scale features of the flow.
A more clear-cut way to control the backscatter has been proposed in Ref. 64,
based on the truncation error analysis just outlined. It consists of identifying
the antidiffusive part of ei through an enstrophy balance calculation. Recalling
that filtering is the result of the convolution by a kernel fe and multiplying
Eq. (5.6.3) by a;, we obtain
= // w(y)w(x)[ue(x) - ue(y)] • V&(x - y)dxdy,
ei(x)u;(x) dx =
5.6. Subgrid-scale Modeling in Vortex Methods
169
where u£ = u * fe. We then write u>(x) = cj(y) + [CJ(X) - u;(y)]. Because of
the incompressibility of the flow, it is readily seen through integration by parts
that the contribution of o;(y) vanishes. This contribution indeed reflects the advective part of the truncation error already mentioned about on the right-hand
side of relation (5.6.5). We are thus left with
/ ei(x)a;(x)dx = / M X ) - a;(y)My)[u e (x) - ue(y)] • V£e(x - y)dx dy.
We now write u;(y) = l/2{[u;(y) + u;(x)] + [u;(y) — CJ(X)]}. By symmetry the
first term does not contribute to the integral and, finally,
/ ei(x)u(x)dx
= ~2
^W -
CJ(X)] 2 [U £ (X)
- ue (y)] • V£e(x -
y)dxdy.
(5.6.6)
Backscatter and dissipation produced by vortex methods at a given location x
as the results of nearby particles located at y are thus distinguished by the sign
of the quantity
In the case of a cutoff that is a positive decaying function of the radius, approaching particles contribute to dissipation, whereas diverging particles yield
backscatter.
To remove the backscatter a natural scheme is to modify the weights of the
particle in such a way as to cancel the positive contribution in relation (5.6.6).
This leads to the scheme
- ^ = J^^P
- "q)vq{[u(xp)
- u(xq)]. V&(x p - x ^ } _ ,
(5.6.7)
where {a}- = min{0, a}.
This scheme can be seen as a PSE method for the diffusion model -div([Du]+
Vu;). In the above scheme, the choice was to remove all the backscatter produced
by the flow strain. This has the advantage of providing us with a parameter-free
method. The numerical experiments reported in Ref. 64 for two-dimensional turbulence show that this choice seems appropriate for inviscid flows. Figure 5.10
shows the evolution of a random initial vorticity field with a periodic vortex-incell method (see Chapter 8). The bottom pictures correspond to a purely inviscid
scheme and show an overwhelming proliferation of small scales, whereas the
LES model of Eq. (5.6.7) allows these small scales to organize into filaments
(which later on will merge into a unique dipole). In Figure 5.11, we have represented the intensity of the subgrid-scale disssipation at all particle locations
Figure 5.10. Successive stages, from left to right, in the evolution of a random vorticity
field in an inviscid calculation (bottom pictures) and with the LES model of Eq. (5.6.7)
(top pictures).
Figure 5.11. Contours of vorticity strength (left) & magnitude of turbulent viscosity
(right) for two successive times (high values of viscosity correspond to light gray levels).
170
5.6. Subgrid-scale Modeling in Vortex Methods
171
for two selected times. The vorticity is shown on the top pictures and the gray
levels of the dissipation on the bottom pictures. These pictures show the correlations between hyperbolic zones in the flow and regions of high dissipation,
whereas in the core of the eddies the flow remains essentially inviscid.
It is natural to wonder whether a less strict backscatter control would be
more efficient in other situations. The additional coefficient to introduce in
Eq. (5.6.7) would somehow play the role of the minimum distance/angle used
in hairpin removal algorithms. The added flexibility could be also seen as reflecting the possibility of using a different cutoff (or a different scale) in the
averaged equation (5.6.2) and in the mollification of the Biot-Savart law. In
viscous calculations, one way to choose this coefficient would be by ensuring
that the backscatter does not exceed the molecular dissipation.
Vorticity Boundary Conditions for the
Navier-Stokes Equations
In this chapter we present boundary conditions for the vorticity-velocity formulation of the Navier-Stokes equations and we describe their implementation
in the context of vortex methods. We restrict our discussion to flows bounded
by impermeable, solid walls, although several of the ideas can be extended to
other cases such as free-surface flows.
The direct numerical simulation of wall-bounded flows requires accurately
resolving the unsteady physical processes of vorticity creation and evolution
in small regions near the boundary. Vortex methods directly resolve the vorticity field, and they automatically adapt to resolve strong vorticity gradients in
regions near the wall, but they are faced with the algorithmic complication of
dealing with the no-slip boundary condition. The no-slip boundary condition is
expressed in terms of the velocity field at the wall and does not involve explicitly
the vorticity.
Mathematically we may understand this difficulty by considering the kinematic and dynamic description of the flow motion and observing that there is
an inconsistency between the number of equations and the number of boundary
conditions. The kinematic description of the flow, relating the velocity to the
vorticity, is an overdetermined set of equations if we prescribe all the components of the velocity at the boundary. On the other hand, no vorticity boundary
condition is readily available for the Navier-Stokes equations that govern the
dynamic description of the flow.
Physically, the no-slip boundary condition expresses the requirement that
the flow field must adhere to the boundary. This condition imposes a torque
onto the fluid elements adjacent to the wall, which in turn, may impart a rotational motion to the fluid. Hence the no-slip boundary condition is physically
manifested by the creation of vorticity at the boundary. In a vorticity-velocity
formulation, vorticity boundary conditions are required for formulating and
172
6. Vorticity Boundary Conditions for the Navier-Stokes Equations 173
quantifying this vorticity creation process. Indeed, vorticity boundary conditions are often presented as models of vorticity creation rather than rigorous
mathematical constraints.
In general we may distinguish between schemes that involve the boundary
value of the vorticity (Dirichlet-type boundary condition) or the wall-normal
vorticity flux (Neumann-type boundary condition). The Neumann form of the
boundary condition is in general preferred, because, as we will see, it is directly
related to the local production of vorticity at a no-slip wall.
The first sucessful attempt to introduce boundary conditions in calculations
of viscous flows by use of vortex methods is due to Chorin [49]. He introduced a
fractional step algorithm in which vortex blobs are created on the surface of the
body in order to enforce the no-slip boundary condition. However, the existence
of such blobs on the boundary introduces an artificial smoothing region for the
vorticity field near the surface of the body that significantly increases the overall
numerical dissipation of the algorithm. To alleviate this difficulty Chorin [50]
proposed the vortex sheet method based on a coupling of the solution of the
Prandtl boundary-layer equations near the body and the full Navier-Stokes
equations away from it. However, this approach seems to encounter difficulties
with fully separated flows [12] in which a well-defined boundary-layer region
fails to exist and requires tuning of several critical numerical parameters, such as
the extent of the region of validity of the boundary-layer equations. Convergence
analysis of this algorithm is hindered by the fact that it does not result from
a well-defined vorticity boundary condition, independent of the geometry of
the domain. As a matter of fact, the only convergence proof so far for this
algorithm [29] is restricted to the two-dimensional half-plane case, and it relies
on the extension of the vorticity and the use of integral representations over the
entire plane.
In an effort to derive exact vorticity boundary conditions, free of any ad hoc
parameters, several methods have been proposed. Anderson [6] computes the
time derivative of the tangential component of the velocity in terms of the time
derivative of the vorticity in the domain. Using the vorticity-velocity form of the
Navier-Stokes equations leads to an integrodifferential equation for the wallnormal vorticity flux. Another way to construct exact boundary conditions was
proposed by Cottet [59]. In order to alleviate the mathematical inconsistency
mentioned above, he proposed to solve for the Poisson's equation that relates
the vorticity and the velocity by using velocity boundary conditions. A vorticity
boundary condition is then derived by enforcing the identity co = V x u at the
boundary.
These formulations hint at a direct coupling of the kinematic and the dynamic
descriptions of the flow. The resulting set of equations is equivalent to the
174 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
original set of the Navier-Stokes equations in primitive variables. However,
energy estimates are not always available for these models and it is not clearly
understood under which conditions natural discretizations of the equations will
lead to stable numerical algorithms.
Returning to the realm of fractional step algorithms, Cottet [62] and
Koumoutsakos et al. [124] independently proposed a splitting algorithm to
replace the no-slip boundary condition with an equivalent vorticity flux condition. In Ref. 62 this algorithm is presented as an extension to general geometries
of Chorin's vorticity creation algorithm. In Ref. 124, the scheme is viewed as a
quantification and extension of the vorticity creation process as envisioned by
Lighthill [138] and formulated by Kinney and his co-workers [115, 116]. The
vorticity creation process is considered as a fractional step algorithm bridging
the kinematic and dynamic description of theflow.Given a certain vorticity field
the presence of boundaries is accounted for by the distribution on their surface
of a vortex sheet whose role is to enforce the kinematic boundary condition of
no-through flow. This vortex sheet is then distributed diffusively into the flow
by translating its strength into a Neumann boundary condition for the vorticity
equation, which can be handled in an integral representation of the vorticity
field. In the context of vortex methods, this consists of modifying the strength
of the particles in the vicinity of the boundary.
In Section 6.1 we present the no-slip boundary condition and its formulation
in terms of a vorticity boundary condition from the physical and mathematical
point of view. Section 6.2 is devoted to the derivation of exact vorticity boundary
conditions in the absence of any numerical approximation of the Navier-Stokes
equations. We then discuss in Section 6.3 several fractional step algorithms
for the Navier-Stokes equations and we emphasize the underlying vorticity
boundary conditions and their implementation in the context of vortex methods
in two and three dimensions.
6.1. The No-Slip Boundary Condition
We formulate the no-slip boundary condition for incompressible flow in a domain V where a body enclosed by a surface S is traveling with a speed Ub(t)
and rotating with angular velocity Qb(O around its center of mass located at x b
(Fig. 6.1).
At an impermeable boundary, kinematics dictate that the normal component
of the flow velocity (u) at any location on the body surface (xs) must be equal
to the normal velocity of the body. Hence, at the boundary S of V,
u(x 5 )-n = UJ n,
where U, = U^ + Qb x (xs - xb).
(6.1.1)
6.1. The No-Slip Boundary Condition
175
Figure 6.1. Sketch showing the different contributions to the flow field of a body in
translation and rotation immersed in a viscous incompressible flow field.
The boundary condition for the tangential component of the velocity results
from an experimental fact. Molecular viscosity acts so that, at their interface,
the tangential components of the velocity of the fluid and the velocity of the
body are the same:
u(xs) -s = Vs -s.
(6.1.2)
This experimental fact is valid in situations in which the fluid is to a good
approximation a continuum. Equations (6.1.1) and (6.1.2) are the constituents
of the no-slip boundary condition:
u(xs)=Us.
(6.1.3)
Fluid elements in contact with the wall are subjected to the flow velocity and
the motion of the wall. This may result in a net torque onto the fluid elements
that may in turn impart a rotational motion to the fluid. The no-slip boundary condition is then physically manifested by the creation of vorticity at the
boundary.
In viscous incompressible flows, boundaries are the only source of vorticity.
As the vorticity field determines the evolution of the flow it is of paramount
importance that numerical simulations resolve accurately this physical vorticity
creation process by accurately enforcing the no-slip boundary condition.
6.1.1. Vorticity and its Production at a Solid Wall
In the vorticity-velocity formulation of the Navier-Stokes equations we seek
boundary conditions for the vorticity field, equivalent to the no-slip boundary
condition. These boundary conditions may appear in a Dirichlet (wall vorticity)
or a Neumann (wall-normal vorticity flux) form.
Before the numerical implementation of vorticity boundary conditions is
discussed, it is helpful to outline the physical character of the wall vorticity and
the wall-normal vorticity flux.
176 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
The wall-normal vorticity flux is a measure of the vorticity that enters the
flow at the boundaries. The equation for the evolution of the vorticity field at
the wall degenerates into a diffusion type equation that may be expressed as:
Da;
—
Dt
=div(vVa;)|
wall
W aii.
(6.1.4)
The fluid elements adjacent to the wall acquire vorticity according to the source
term defined by the tensor:
Jj = vVu).
The tensor Jf is defined as the wall vorticity flux tensor [105]. We are interested
in the vorticity acquired by the fluid elements near the wall, and hence in the
wall normal component of this source tensor, defined as the wall vorticity flux
vector:
<r
n J
f
v
.
This flux is responsible for the overall production of vorticity: integrating the
vorticity equation over the fluid domain gives the following form of Kelvin's
theorem of conservation of circulation.
dr
f du
— = v I — (s)ds.
dr
Js 3n
Another important feature of the vorticity fluxes is their relationship with pressure gradients on the walls. To clarify this point, let us assume that the velocities are evaluated in a frame moving with the body, so that we have to deal
with a velocity vanishing at the wall (Us = 0). We consider a local curvilinear orthogonal coordinate system around the body, with axes (ei, e2, e3),
where ei, e2 are parallel to the surface S. Let us denote by £1, §2, §3 the coordinates in these axes and by h\, h2, h3 the corresponding scale factors, such that
dx = h\d%\*\ + h2d^2e2 + h3d%3e3.
In these coordinates the wall is defined by §3 = 0. We may write:
co = V x u =
\d(h3u3)
h2h3 [[
i)
d(h2u2)
9§2
3(/J3K3)]
M2I
Since u\ = u2 = 0 on §3 = 0, we already obtain
co3 = 0 on §3 = 0.
6.1. The No-Slip Boundary Condition
111
In other words, the wall-normal component of the vorticity is zero at the wall. If
we now write the velocity-pressure formulation of the Navier-Stokes equation
and take its tangential components on the wall, we get, on S,
1 dp
(V x UJ) • s = — Au • s =
v 3s
for all tangent vectors s. Since &>3 = 0, taking successively s = ei, s = e 2 gives
v
d(h2o)2)
~h2~h~3
v
a?3
d(h\(D\)
1 dp
=
~h~iWi'
I dp
These relations link the wall-normal fluxes of the tangential components of the
vorticity to the pressure gradients in the corresponding directions. In particular they imply that vorticity fluxes can be deduced from measurements of
the pressure at the walls. Reciprocally, if one wishes to recover the pressure
from a velocity-vorticity calculation, identifying the proper vorticity boundary condition allows one to specify the pressure boundary condition needed to
complement the Poisson equation Ap = div [(u • V)u].
Finally, let us mention that the vorticity at the boundary is related to the
values of the wall shear stresses: at a solid wall
n • r = — fin x a;,
where r is the shear-stress tensor, which is defined by
and /x, the dynamic viscosity, is the molecular viscosity v divided by the density.
Thus, prescribing the vorticity field at the boundary is physically equivalent to
prescribing the wall shear stress.
6.1.2. Mathematical
Formulation
For simplicity, we present the mathematical formulation for two-dimensional
flows past stationary solid walls or a single closed body. The case of threedimensional flows will be discussed in Section 6.3.
The set of governing equations and boundary conditions may be expressed
as follows.
178 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
• The governing Navier-Stokes equations in velocity-vorticity formulation:
dco
ot
\-(u-Vco) = vAco in V.
(6.1.5)
• Initial conditions:
&>(•, 0) =
COQ
in V.
• For an incompressible flow the velocity field may be expressed in terms of
the streamfunction ^ as
u = V x vl> in V,
and the streamfunction is related to the vorticity by
-AV=co
inV.
(6.1.6)
• The boundary condition of no-through flow (u • n = 0) can be expresssed as
vI/=0
onS.
(6.1.7)
• The no-slip boundary condition, which requires additionally that the tangential component of the velocity vanishes at the wall:
— = 0 on S.
(6.1.8)
9n
We have discussed in Chapter 4 that, for a given motion of the body, the vorticity
field determines the flow field satisfying the condition of no-through flow. In
fact, the set of equations (6.1.6)—(6.1.8) is overdetermined, as only the normal
component of the velocity at the wall is necessary tofixtheflowuniquely. At the
same time, there is not a vorticity boundary condition available for convectiondiffusion equation (6.1.5).
There is a restricted class of vorticity distributions that satisfy the no-slip
condition on the tangential component of the velocity. Proper vorticity boundary
conditions for the Navier-Stokes equations must result in a vorticity field in the
interior of the domain that satisfies the set of equations
- A ^ = a) in V,
*I> = 0 on dS,
which automatically yields
— =0
dn
on S.
6.2. Vorticity Boundary Conditions for the Continuous Problem
179
We call such a vorticity field admissible. As noted in Ref. 168, a characterization
of admissible vorticityfieldsis that they are orthogonal to any harmonic function
in Q. This results from straightforward integration by parts.
It is clear that it is possible to derive proper vorticity boundary conditions
for the Navier-Stokes equations. In a primitive variable (u — p) formulation
of the Navier-Stokes equations the no-slip boundary condition is explicitly
enforced. At the same time, one may envision the vorticity field as evolving
with an implicit boundary condition, the vorticity or the vorticity flux that is
established at the boundary.
The task, of course, is to derive these vorticity boundary conditions without a priori knowledge of the flow field. We distinguish between two types
of methodologies to achieve this goal. In the first type, one attempts to derive
vorticity boundary conditions that can directly complement the governing equations in the absence of any discretization. We call this approach the continuous
algorithm, as it allows the set of the governing Navier-Stokes equations and
the boundary conditions to be solved simultaneously. The second type, which
is more widely implemented, comprises the so-called viscous splitting algorithms. In this case the boundary conditions are implemented in a fractional
step algorithm similar to that seen in Chapter 5 that formulates the problem as
a succession of inviscid and viscous substeps.
6.2. Vorticity Boundary Conditions for the Continuous Problem
We have chosen to outline here two particular formulations because of their
apparent simplicity (for a thorough discussion of vorticity boundary conditions
we refer to the book of Quartapelle [168]). The first one, due to Anderson [6],
results in a Neumann boundary condition, whereas the second, suggested by
Cottet [59], may result in either a Dirichlet or a Neumann boundary condition.
The idea behind the method suggested in Ref. 6 is that, if one assumes that
the initial vorticity field is consistent with no-slip boundary conditions, one
needs only to enforce that the time derivative of the vorticity is admissible, i.e.,
— — / G d(x-y)a)(y,t)dy
at an Jv
= O;
xeS,
where Gj is the Green's function associated with the Laplace equation in V
with a homogeneous Dirichlet boundary condition on S. After the integral and
derivatives are exchanged, the Navier-Stokes equation yields
Gd(x - y)[-(u • V)o) + vA<y](y, t)dy = O; xe S,
180 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
which, after integration by parts of the term Gj Aco, leads to
dco
d
a / A ~(x-y)co(y,t)dy
an Jv an
o
1
^
^
"
(6.2.1)
This is an integrodifferential equation for the wall-normal derivative of the
vorticity field. Observe that Eq. (6.2.1) couples values of the vorticity on the
boundary with values of both the velocity and the vorticity in the fluid domain.
In turn the velocity and vorticity in the fluid domain are conditioned by the
boundary values of the vorticity.
The approach followed in Ref. 59 (see also [72]) is based on the the representation of the velocity in terms of the vorticity in the flow and the boundary
values of the velocity through the Poincare formula (see Chapter 4). This formula consists of viewing the velocity as the solution of the following system:
Au = - V x co.
This system can now be supplemented with boundary conditions on both components of the velocity at the wall. The expected pitfall of this approach is that,
for a given vorticity field co, the velocity satisfying
— Au = V x co in V,
u = 0 on S
is not necessarily divergent free, thus violating the assumption of incompressibility. Therefore this velocity does not necessarily satisfy V xu = co. However,
it turns out that enforcing V x u and u; to coincide on the boundary is enough
to make them coincide everywhere. This requirement supplements the set of
the governing equations, giving us the following system of equations:
dco
at
h (u • V)co - vAco = 0 in V,
co(-, 0) =
COQ
in V,
- A u = V x co in V,
u = 0 on S,
co = V x u
on S.
From this formulation, it is also possible to derive a Neumann-type boundary
6.3. Viscous Splitting Algorithms
181
condition. For a nonrotating body, the correct boundary condition is
dco
d
1 f d
— = — (V x u) - — / — [V x
3n
an
\S\ Js on
u(y)]dy.
(6.2.2)
The role of the constant substracted to 8/3n(V x u) on the right-hand side above
is to ensure that at all times Kelvin's theorem, for the conservation of circulation,
is enforced (we refer to Ref. 63 for a proof that the resulting system is equivalent
to the Navier-Stokes equations with the no-slip boundary condition).
In closing this section, we emphasize that, from a numerical point of view,
the equivalence with the original problem is not enough to ensure the stability
of the numerical methods based on these formulations. To ensure this stability,
one has to derive the so-called energy estimates. These estimates indicate how
the errors in the computation of the velocity will interfere, through the vorticity
boundary condition, with the numerical scheme used for the discretization of
the vorticity equation in the fluid domain. To our knowledge such estimates
are not available for either one of the above two methodologies. However,
the computations performed by these authors (in general with finite-difference
discretizations) do indicate that these boundary conditions are stable.
6.3. Viscous Splitting Algorithms
We have already seen in Chapter 5 that the viscous splitting is a natural approach to design diffusion algorithms for vortex methods. It is also a popular
methodology for enforcing the no-slip boundary condition in the context of
vortex methods. It is a fractional step algorithm, handling successively the inviscid and the viscous physical processes as described by the different terms
of the Navier-Stokes equations. In 1963, Lighthill [138] used the concept of
a fractional step algorithm to describe the generation of vorticity at a solid
boundary. However, he never explicitly formulated this process. Ten years later
a number of numerical methodologies appeared, formulating the concept of
vorticity generation at the boundary and deriving vorticity boundary conditions
for the vorticity-velocity formulation of the Navier-Stokes equations.
Starting from the formulation of Lighthill's algorithm, we outline the different
steps of viscous splitting. This helps elucidate the differences and the similarities
of the various methodologies that have been proposed.
63.1. Vorticity Creation at a Solid Wall: LighthilVs Model
Let us assume that at the nth time step (corresponding to time t — 8t) an admissible vorticity field has been computed and we seek to advance the solution
182 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
to the next time step (time t). This is accomplished in the following two substeps:
Substep 1: Using as initial conditions /(x) = of (xn, n8t), we solve the system
— +u-Va; = 0
dt
co(-,t-8t) = f
inV,
(6.3.1)
inV,
(6.3.2)
- A ^ = co in V,
^ =0
on S.
(6.3.3)
(6.3.4)
The solution of the Poisson equation gives
where (see Chapter 4):
tya)=
f
Jv
co(x\t)G\x-xf\dxf,
tyy represents the solution to the homogeneous equation satisfying the boundary conditions, and 4>ext results from the external field (Fig. 6.1). As was
discussed in Chapter 4, *I>y may be represented by the flow field induced by
a vortex sheet y distributed on the surface of the body:
JsY
X ,t)G\x-x'\dx\
and the solution of this problem is reduced to identifying the strength of the
vortex sheet in order to satisfy the no-through-flow boundary condition. It
was shown in Chapter 4 that a convenient method of solving for the vortex
sheet is to solve the integral equation:
y(x) + 2 [ — (G\x - x'|) y(x) dx' = -2/i(x),
Js dn
(6.3.5)
where
h(x) = —— (x) + -T-^00 - Us • s.
(6.3.6)
dn
an
We obtain a unique solution for this equation by adding a constraint on the
strength of the vortex sheet. This constraint is usually provided by Kelvin's
circulation conservation theorem:
y(x) dx = -2A[Qb(t + 8t) - Qb(t)l
s
where A denotes the area of the body.
(6.3.7)
6.3. Viscous Splitting Algorithms
183
At the end of this step a vorticity field has been established in the fluid and
a vortex sheet has been established on the surface of the body. We may think
of the vortex sheet y as part of the interior vorticity, so that the resulting
vorticity is
co' = co — y (8) SsAssume further that the vortex sheet y ® 8S is slightly detached inside V.
Then one can view the velocity field associated with co' as satisfying the
no-slip condition at the boundary and undergoing a sudden jump inside the
domain.
Substep 2: Lighthill concludes the description of his model by stating that the
vorticity per unit area has been created and is equal to the negative of this
vortex sheet strength. What remains incomplete in this model is how this
vorticity enters the fluid adjacent to the wall or how the vortex sheet strength
may be incorporated in a vorticity-type boundary condition.
We will try to clarify this point in the following subsections. One may already
observe that the strength of the vortex sheet has dimensions of velocity (or length
over time). To obtain an appropriate (dimensionally correct) vorticity boundary
condition, this vortex sheet strength can be manipulated so that a Dirichletor a Neumann-type boundary condition may be obtained. This is basically the
point of diversion of the various formulations involving vorticity boundary
conditions. In order to get a Dirichlet-type boundary condition, Chorin [49]
divides the strength of the vortex sheet by a length equal to the elementary
discretization length on the body surface, whereas Wu [202] multiplies the
strength by the mesh size in the normal direction to obtain the vorticity on the
body. Alternatively, Kinney and his co-workers [115,116] envision this vortex
sheet as equivalent to a vorticity flux over a small time interval (thus dividing
the sheet strength by time to obtain the proper units of acceleration). An integral
constraint is imposed on all formulations on the vorticity created at the wall so
as to satisfy Kelvin's theorem of production of circulation.
6.3.2. Chorin's Algorithm and the Vortex Sheet/Vortex Blob Method
The goal of Chorin's algorithm is to reformulate the vorticity production mechnisms described above in terms of a rigorous splitting algorithm.
As in the case of an unbounded domain (see Section 5.1), it is natural to
split the Navier-Stokes equation into an inviscid and a viscous part. Compared
with the full space, the situation is complicated by the fact that the inviscid part
can only handle the no-through-flow boundary condition. Thus each viscous
184 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
substep in the algorithm is singular in the sense that it starts with a velocity field
violating its boundary condition. As a result, the convergence proof [21] for the
splitting algorithm is far more involved than the one given in Section 5.1.
If one considers the velocity-pressure formulation, one way to enforce the
no-slip boundary condition in the viscous step is to provide an odd extension
of the velocity field across the boundary and to solve the Stokes equation in the
full space. The algorithm described in Ref. 54 proceeds as follows.
• Solve the Euler equation in Q with u • n = 0 on S.
• Extend the velocity across dQ and solve the Stokes equation in R 2.
In a vorticity-velocity formulation, this odd extension is equivalent to the creation of a singular vorticity distribution at the boundary - a vortex sheet - with
strength equal to the jump of the tangential component of the velocity that is
twice the slip at the boundary. The Stokes step then preserves the symmetry of
the velocity across the boundary, while regularizing thefields.Thus the vorticity
is even across the boundary and smooth so it satisfies dco/dn = 0 on S.
If one wishes now to reformulate this algorithm in V and in terms of the
vorticity, a natural candidate is the following algorithm, where At > 0, tn = At,
and con approximates the vorticity at time tn
Substep 1: Solve over one time step the Euler equation with a no-through-flow
boundary condition and initial vorticity field con\ let ton+\/2 be the resulting vorticity and u n+ i/2 be the related velocity, with the normal component
vanishing at the boundary.
Substep 2: Cancel the slip by incorporating a vortex sheet in the interior vorticity: this gives a new vorticity field
&/H-1/2 = U>n+\/2 ~ (U«+l/2 * S) 0 8S-
(6.3.8)
Substep 3: Solve over one time step the heat equation with the homogeneous
Neumann boundary condition,
dco
— vAco = 0
<B(-,0) = con+x/2
dco
an
= 0
(6.3.9)
in V,
onS
in V,
(6.3.10)
(6.3.11)
to finally obtain con+\.
One recognizes in Eq. (6.3.8) the vorticity field already described in Lighthill's
formulation. As it is clear in the formulation that uses the extension across the
6.3. Viscous Splitting Algorithms
185
Figure 6.2. Evolution of the velocity profile in the initial stage of a Stokes step.
boundary, the vortex sheet has to be considered as part of the interior vorticity,
and the effect of the diffusion step that follows is in particular immediate regularization of the discontinuous velocity profile, establishing a boundary layer
(see Fig. 6.2). Note that the factor of 2 in the strength of the vortex sheet when
the Stokes equation is solved in the full space has disappeared here. The reason
is that in the full-space version only half of the boundary layer spreads into V.
The circulation conservation principle can be again called for as a check that
the coefficients are correct in both cases. Subsection 6.3.3 will further elucidate
these points.
The Vortex Sheet/Vortex Blob Algorithm
This is a vortex method [50] based on the vorticity creation algorithm just
outlined, with the addition of two main ingredients. The first one is the use of
the Prandtl boundary-layer approximation for the flow field near the surface
of the body. This approximation in particular yields a simple expression of the
slip at the end of the first substep. The second one is the use of flat vortex sheet
elements, rather than vortex blobs, in the boundary layer. This prevents vortex
elements from leaking outside the fluid domain and allows for a more natural
discretization of the vortex sheet involved in the second step of the algorithm.
The Prandtl equations are based on the assumption that, at the boundary,
velocity gradients are essentially in the component parallel to the wall, and
diffusion of vorticity is essentially normal to the wall. To exploit these assumptions, one needs to work in local coordinates adapted to the boundary geometry.
This is in general done through a mapping of the physical domain onto a halfspace geometry. For simplicity we thus focus on the half-space case: If we
denote by x and y the tangential and the normal coordinates, respectively (V is
defined by y > 0) and by (w, v) the velocity vector in this coordinate system,
the Prandtl equations then are given by
dco
dco
dco
2
dt
dx
dy
dy1
co = 0 ,
CO =
— -
(6.3.12)
du
(6.3.13)
186 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
supplemented by the continuity equation, no-slip boundary conditions at y = 0,
and a far-field condition in general written for the u component at a distance
r ^ of the wall:
K(x,roo,0 = Uoo(x,t).
(6.3.14)
A vortex sheet approximation of co consists of writing
co ~ ^2ajbe(x
~ xj)$(y — yj)-
(6.3.15)
j
In the above equation 8 is the one-dimensional Dirac mass in the y direction
and b£ is a one-dimensional cutoff function in the x direction, given by bE(x) =
e~xb(x/e). The weight OLJ is the result of the multiplication of dl, a grid size in
the direction x, and a quantity of the size of a velocity.
A direct integration of Eq. (6.3.13), with the right-hand side given by
Eq. (6.3.15), yields
u(x, y) = Uoo(x) + ^2<Xjbe(x - Xj)H(yj - y),
(6.3.16)
j
where H denotes the Heaviside function. The continuity equation in turn allows
us to deduce the value of v:
v(x,y) =
^
ox
y -^T ajb'e(x - Xj) min(y, yj).
*—r
(6.3.17)
j
If one starts from a given collection of sheets, one step of the overall algorithm
includes the following substeps.
Substep 1: Compute u and v with Formulas (6.3.16) and (6.3.17); move the
sheets with this velocity.
Substep 2: Compute u at y = 0; create new sheets at the boundary with strengths
oij = —U(XJ)
dl.
Substep 3: Random walk the sheets in the y direction, using the ideas of
Section 5.2, to solve for the diffusive part of Eq. (6.3.12). If a sheet crosses the
boundary, reflect it on the other side. If a sheet moves beyond r^, transform
it into a vortex blob.
For substep 2, instead of using one vortex sheet with varying strength at every
wall point, one in general prefers to introduce several elementary vortex sheets
that have all the same strengths. These originally collocated vortex sheets scatter
in the first subsequent random walk.
6.3. Viscous Splitting Algorithms
187
Note that the reflection of particles at the boundary amounts to extending
in an even fashion the vorticity outside the domain, as prescribed in Ref. 54.
It thus translates homogeneous Neumann boundary condition (6.3.11). There
is no factor of 2 in the strengths of the vortex sheets because, because of this
reflection, all sheets created at the boundary end up in the fluid domain V.
One may observe that the use of vortex sheets near the wall allows avoiding the inconsistency mentioned in Section 4.5 resulting from the vortex blobs
that overlap the boundary. However, this is at the expense of using the Prandtl
approximation, which requires relying on a mapping of the domain into a halfspace geometry. Moreover, it is well known that this approximation ceases to
be valid as soon as the flow detaches from the wall. Another difficulty associated with the method is related to the interface condition, in which vortex
sheets turn into vortex blobs. The value of r^ is in general taken of the order
of the boundary-layer width. As for L^, it is computed on the basis of the
Biot-Savart law, with a vorticity field consisting of both the vortex sheets and
blobs. Formula (6.3.16) certainly ensures a continuous value of the tangential
component of the velocity, but, as pointed out by Anderson and Reider [12],
not necessarily of the normal component, creating oscillations in the interface
zone. This problem can be fixed in the context of a finite-difference method if
an appropriate linear system is solved to enforce the continuity of both components of the velocity, but, to our knowledge, not in the context of random-walk
methods.
The vortex sheet/vortex blob method has been extensively used in conjunction with the random-walk method for the simulation of slightly viscous flows
around obstacles. We refer for example to Ref. 188 for flows around cylinders and to Ref. 185 for a validation study of the method for flow over a
backward-facing step at high and moderate Reynolds numbers. These studies
show that the method is appropriate to obtain the qualitative features of the
flows.
Pucket [166] gives an extensive numerical study of the convergence properties of the vortex sheet/vortex blob method. The relevant numerical parameters
that govern the accuracy of the method are the circulations of the individual
vortex sheet introduced at the wall, the length of the sheets, and the time step.
It appears that reducing the first two parameters does not allow us to obtain
converged results if the time step is not reduced at the same time. We present in
Figures 6.3 and 6.4 two illustrations of a convergence study by Mortazavi, of
the vortex sheet method in which the circulations of the sheets and the time step
are reduced. Figure 6.3 shows the averaged velocity profiles, and Figure 6.4
shows the averaged streamlines.
188 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
1.00.9-
I
I
J* * *
0 0 0
0.8- X X
I
!
gama-0167
garaa».0OB3
gama*.0042
gama«0033
gazn*-.0027dt».025,lm>05
0.0-0.5
AVERAGE VELOCITY PROFILE
Figure 6.3. Velocity profiles behind a backward-facing step for decreasing values of the
sheet circulations (Courtesy of I. Mortazavi).
6.3.3. A Vorticity Creation Algorithm with Vorticity Flux
Boundary Conditions
Our goal in this section is to clarify further the links among the no-slip condition, vorticity creation, and vorticity flux boundary condition in the context of
splitting-based vortex algorithms.
We first focus on the continuous problem in two dimensions, that is, in
the absence of spatial discretization, and we give a reformulation of vorticity
creation algorithms that is intrinsic in the sense that it carries on to general
geometries. We then show how integral formulations allow us to handle vorticity
flux boundary conditions in a vortex method. We finally discuss the threedimensional case.
6.3. Viscous Splitting Algorithms
189
Figure 6.4. Convergence study for the vortex sheet/vortex blob method: averaged streamlines for the flow behind a backward-facing step for different numerical parameters
values (Courtesy of I. Mortazavi).
The Continuous Problem
The formulation of the no-slip condition, in terms of a splitting algorithm with
a vorticity flux boundary condition, has been proposed independently by Cottet
[63], and Koumoutsakos et al. [ 124]. The latter approach consists of an enhanced
implementation, in the context of vortex methods, of the algorithm originally
proposed by Kinney and his co-workers [115, 116]. To describe this algorithm
in more detail, we follow the approach described in Ref. 63.
To understand the links between vorticity creation and vorticityfluxboundary
conditions, let us go back to the form of Eqs. (6.3.8)—(6.3.11) of the vorticity
creation algorithm, and first observe that, if we assume some kind of time
continuity of the heat equation, it is natural to expect that (recall that, for
190 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
simplicity, we deal with vanishing velocity at the boundary)
uh • s(-, t) -+ 0
when
t - > tn,t > tn.
This claim can actually be proved in an appropriate functional framework, at
least for the half-space case, through the use of integral representations. As a
result, one can rewrite step 2 of the vorticity creation algorithm [Eq. (6.3.8)] as
—(u h.s)(',t)®8sdt.
(6.3.18)
This leads us to reformulate the algorithm in a slightly different way; in this
version we consider two vorticity fields coh{ and (x>\ that are respective solutions
of the following two problems, in the same time interval [tn, tn+\]:
Problem 1:
- vAco\ = 0 in V,
(6.3.19)
c
(6.3.20)
~df ~
9n
= 0 on S.
(6.3.21)
Problem 2:
-
dt
V&Q)h2 = 0
co%(;tn)=con
in V,
inV,
(6.3.22)
(6.3.23)
where uh{ refers to the velocity field associated with co\.
We then set <j)n+\ = co\{-, tn+\). This is the result of one step of the algorithm. Note immediately that system (6.3.19)—(6.3.21) does not produce any
net vorticity in the flow, and thus the circulation of Ui is constant. Therefore
boundary condition (6.3.24) prescribes the right amount of total circulation to
enter the flow (zero in the present case).
It is important to note that, in the half-plane case, the only difference between
the original algorithm and formulation (6.3.19)—(6.14.24) is that the former
scheme uses one additional time discretization when it incorporates the vortex
sheet in the flow (while the modified scheme does it in a continuous way). We
can readily check this by extending the solution of Eq. (6.3.22) to the whole
6.3. Viscous Splitting Algorithms
191
plane: If V = {(x\, x2), x2 > 0} and we set
(cbh2(xux2)
CO$(Xi,X2) = <
[(D2(Xi,—X 2)
if*2>0
if X2 < 0
then <5>2 satisfies
—- -
dt
vAw2 = 2v—-(JCI)
3n
® 8(x 2) in R2.
Using Eq. (6.3.24), we can split this last equation into two substeps: first a
diffusion equation with zero right-hand side, which, translated as a boundaryvalue problem, would be equivalent to Eqs. (6.3.9)—(6.3.11), then the equation
£ - - * £ « ••>•*•
The result of this last step is precisely Eq. (6.3.8) (the apparent discrepancy
caused by the factor of 2 comes from the fact that if the vortex sheet is diffused,
only half of it will fall in V).
The advantage of formulation (6.3.19)-(6.3.24) is that it is free of any assumption on the geometry. Another interesting feature of this algorithm is that
its convergence can be rigorously proved. This scheme is actually enstrophy
decreasing, which is what should be expected for the solution to the Stokes
problem. This stability property is a key ingredient in proving its convergence
(we refer to Ref. 63 for this proof).
If we now turn to the full Navier-Stokes equations, a natural generalization of
the method summarized by system (6.3.19)-(6.3.24) would consist of restoring
advection terms and replacing Eq. (6.3.24) with
4*
If we recognize on the right-hand side a particle derivative along the flow determined by Ui and note that this flow is parallel to the wall, the same arguments
as those given above show that this formulation is closely related to Chorin's
algorithm in the half-space case. The convergence of the algorithm based on
Eq. (6.3.25) is an open question.
Integral Techniques
In this subsection we describe the algorithm proposed in Ref. 124. This algorithm is implemented through integral technique vorticity flux boundary conditions in a vortex code based on the PSE method described in Section 5.4.
192 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
The method is again based on a viscous splitting of the Navier-Stokes equations, and we will focus on the approximation of a diffusion step. We thus have
successively to solve for a diffusion equation, compute the slip, and turn it into
a vorticity flux boundary condition, along the lines of system (6.3.19)-(6.3.24).
We first observe, that if we write 002 = co\ + to, co solves
dco
ot
vAw = 0,
in V x [0,f],
co(x,0) = 0 i n V ,
dco
d
v— = F(x, t) =
(u • s)
dn
dt
on S x [0, t].
(6.3.26)
The solution of the above equation may be expressed in integral form [85] as
co(x,t) = I f Q[x-£,v(t-T)-\iL(£,T)d£dT,
Jo Js
where the diffusion potential /x(x, t) is determined as the solution of
1
2
(6.3.27)
v / / —[xJo
Jo Js 9n
(6.3.28)
and Q is the Gaussian kernel:
|x| 2
G(x, r) = - — exp - The resulting expressions for the vorticity field involve integrals over only the
surface of the body. We may discretize those integrals with a boundary integral
method by assuming that the surface of the body comprises a set of discrete
panels (straight or curved) and assuming a certain variation (constant, linear,
etc.) of the unknown function /z(x, t) in space (over the panels) and time.
For small values of v the kernel Q is stiff, so in order to evaluate accurately
the surface integrals, it is advisable to use explicit integration formulas. Hence
the vorticity field induced by a panel with index / and length d, centered at xh
may be expressed as an integral over time:
1 /"
coi(x,t) = - / / x / ( r ) 0 ( x - x / , r - r)dz,
(6.3.29)
2 Jo
where, in a coordinate system x = (x, y) with the x axis parallel to the wall,
6.3. Viscous Splitting Algorithms
193
The time integral is evaluated with the midpoint rule. Finally, the strength of
the particles Vj = a>(\j)Vj are updated by
8t
where M is the number of panels on the wall.
To complete the evaluation of the vorticity field in the domain it remains to
determine the surface density \x. Following the derivation of Ref. 93, we solve
Eq. (6.3.28) explicitly by exploiting the local character of the Green's function
G and its normal derivative on the body.
Consider the double-layer heat potential, which is defined as
=f[
If we describe the shape of the body around the panel location xw by using a
Taylor's series expansion, we have that
HM(x», St) « ^ ^
vW^72 + O
Substituting the above result into the equation for the heat potential (6.3.28),
we find for points (s) along the surface of the body that
H(s) ^ -2F(s) \l - K(s)y/nv8t/2\
.
(6.3.31)
Note that for the case of a cylinder of radius R, the curvature is constant (K =
l/R), and for the case of a flat plate the curvature is zero so that the surface
potential is a function of only the vorticity flux.
Combining now Eq. (6.3.30) and approximation (6.3.31) we obtain an algorithm for updating the particle strengths in the domain so that the no-slip
boundary condition is enforced:
M
r; + 1 = r ; + Vj st ^
qi
(1
f
_N 0(x,- - X/, st/2),
(6.3.32)
where the / index refers to the panels, the j index to the particles, and the n
index to time; the vortex sheet strength is derived from Eq. (6.3.26) by the
first-order formula
qt = — (ui -s)(Si).
ot
194 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
In computations, 0 can be calculated efficiently with tabulated values, thus
avoiding the costly evaluation of the error functions that are involved. Also the
local character of 0 requires the interaction of each panel only with its nearby
particles, resulting in a computational cost that scales as O(M). To summarize,
the algorithm implemented in Ref. 124 proceeds as follows:
• Advect particles and solve for the diffusion in V with a PSE scheme.
• Compute the slip on S.
• Use formula (6.3.32) to distribute the resulting boundary vorticity flux onto
the particles in V.
Two observations should be made here concerning this algorithm. First, the
curvature term in formula (6.3.31) clearly indicates the discrepancy that would
result from the direct implementation of the half-space formula of vorticity
creation, as used in vortex sheet algorithms. This error is probably hidden by
the other source of errors involved in vortex sheet methods (random walk and
Prantl approximation in particular). Second, in the algorithm just described,
unlike the one described in the previous paragraph [Eqs. (6.3.19)-(6.3.24)],
the second diffusion step is not implemented with an homogeneous Neumann
boundary condition. However, it conserves the total circulation, and the complete algorithm is therefore consistent with Kelvin's theorem; the results that
we present now seem to indicate that this version of the vorticity flux has the
same convergence features as the splitting method of Eqs. (6.3.19)-(6.3.24).
Figure 6.5 shows the results of the algorithm of Ref. 124 for the viscous flow
around a purely rotating cylinder. We may construct an analytic solution to this
problem by assuming the streamfunction of the flow to be of the form [96]
If the angular velocity of the cylinder is Q sin at, under the assumption of
symmetry, the vorticity equation reduces to a diffusion-type equation whose
analytic solution is given by
w(r, t) = Acos(at) [keix{c)K~(cr) - kerx(c)K+(cr)]
- Asin(aO [kei{(c)K+(cr) - ker{(c)K~(cr)],
with the definitions
K^icr) =ker(cr) ± kei(cr)
fr
c = \ / —,
V
,
l
Qc
A = ——
=
V2 kf()
=—,
+ ktf()
6.3. Viscous Splitting Algorithms
T = 1.0, Re = 40
i
1.0
o
b
Vorticity
0.5
-0.5
195
i
»
i
1
\
1
1
Exact
A Numerical
1
"\
-\
:\
: \
- \
-
f ^ A .-A—...
«
-
-
-
-1.0
-
1.0
^ ^
1.5
l
x/R
2.0
i
f
t
2.5
Figure 6.5. Vorticity field around a purely rotating cylinder with Q = l,cr = l a t R e =
U D / v = 40, M = 180, St = 0.025.
where ker\(x), kei\{x) and ker(x), kei(x) are the Kelvin's functions of order
1 and 0, respectively. In Figure 6.5 we show the results of the computed and analytical vorticity field for T = 1 and v = 0.5. In order to avoid the computation
of the transient solution in this computation, the vorticity field was initialized
with the analytical solution at the end of a period.
Another illustration of the accuracy of the vorticity flux boundary conditions
is the computation of the drag of an impulsively started cylinder. In the early
stages of the flow development, the drag coefficient is inversely proportional
to the diffusion length «J(yt), thus exhibiting a rather singular behavior. For
small times analytical solutions exist [16, 57] for various quantities of the flow,
including the drag coefficient. In Figure 6.6, we present the drag coefficient
obtained using the vorticity flux boundary conditions (a PSE scheme accounts
for diffusion) and we compare with the analytic results for various Reynolds
numbers.
At later times the analytic solutions are no longer valid, and we compare the
time history of the drag coefficient (see Figure 6.7) at a Reynolds number of
3000 with the drag coefficient obtained by using a spectral-element calculation (Henderson, (private communication)). The plateau at approximately t = 2
196 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
8
6
o
4
Q
i"
•i
Re = 40
• V
\
^55
2
0
0.0
Re = 1000
2.0
\
«HHH
0.5
0.0
0.2
0.4
0.6
Time
0.8
1.0
0.0
Re = 550
I"
0.2
o
Q
n R
0.2
0.4
0.6
Time
0.8
1.0
1.0
I
-
-
, , , , , ,
0.0
).O
0.8
Re = 9500
2.0
2 i.o
0.4
0.6
Time
0.0
0.2
0.4
0.6
Time
0.8
1.0
Figure 6.6. Linear plot of the early time history of the drag coefficient for an impulsively started circular cylinder. Solid curves [57], dashed curves [16], symbols, present
computations.
6.3. Viscous Splitting Algorithms
197
T= t U/ R
Figure 6.7. Drag coefficient for an impulsively started cylinder at Re = 3,000. Solid
line (Vortex methods), Bullets 14th order spectral element method, Dashed line, 12th
order spectral element method, with refinement near the separation points.
corresponds to the formation and the eruption of secondary vorticity (see
Figure 6.8 for the flow evolution) and cannot be captured if the near-wall vorticity field is not accurately resolved. This is one of the features of this flow that
makes this problem particularly challenging for various numerical schemes. As
is shown in Figure 6.7, a spectral-element method produces the same results as
a vortex method when the grid is properly refined in the region of secondary
separation.
In vortex methods the computational elements automatically adapt to resolve
these sensitive regions of the flow, resulting in robust calculations. Simulations
with finite-difference [12] and spectral-element methods [84] exemplify these
difficulties and use large numbers of grid points and relatively small time steps to
produce results that are in good quantitative agreement with the results presented
in Figure 6.8.
Finally, Figure 6.9 shows the evolution of the vorticity field in a dipole wall
interaction at a Reynolds number of 3200. The method uses a vortex-in-cell technique to evaluate the particle velocities and a PSE scheme for the diffusion. The
vorticity boundary conditions are handled by the integral just described, but the
diffusion step preceding the computation of the slip is done with homogeneous
Neumann boundary conditions. In other words, the method that is implemented
corresponds exactly to system (6.3.19)—(6.3.24). Because of the simplicity
of the geometry, homogeneous Neumann boundary condition (6.3.21) is easily
oo
ON
I
I
Figure 6.8. Vorticity contours behind an impulsively started cylinder at Re = 9500 with a PSE scheme that uses vorticity flux
boundary conditions [125].
6.3. Viscous Splitting Algorithms
199
(a)
(b)
I
\
(c)
Figure 6.9. Successive stages for the rebound of a dipole impinging at a wall at Re = 3200
with a PSE algorithm and vorticity flux boundary conditions.
200 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
(d)
Figure 6.9. (Continued)
enforced by use of particle images with identical circulations. It is interesting
to mention that comparisons of the results obtained by this method with those
obtained in Ref. 128 by use of the method of Ref. 124 showed no discernible
differences. It is also worth mentioning that careful comparisons of these simulations with results obtained by high-order finite-difference methods [159]
showed that, although first order in time (because of the splitting involved in
the method), the present algorithms compare well, for the same grid size, with
high-order finite-difference boundary vorticity formulas (see Ref. 133 for more
discussions on these tests), with the advantage (as usual for vortex methods) of
allowing much bigger time steps.
The Three-Dimensional Case
The formulation of vorticity boundary conditions in terms of integral equations linking boundary terms and vorticity in the flow has been addressed in
Ref. 40. Here we focus on a splitting-type algorithm in the spirit of what we
just presented for the two-dimensional case.
Vorticity boundary conditions for three-dimensional viscous flows have,
compared with the two-dimensional case, two additional difficulties. First,
since vorticity is a vector, one needs three instead of one boundary condition. Secondly, vorticity created at the boundary must be divergence free, and
this constraint must somehow enter the boundary conditions. To simplify the
exposition, we assume that the boundary is a flat plate located at x?> = 0. The
general case follows by use of a local coordinate axis parallel and orthogonal
to the wall, along the same lines as given in Subsection 6.1.1. We also assume
a velocity vanishing at the wall.
6.3. Viscous Splitting Algorithms
201
As we already mentioned in Subsection 6.1.1, one vorticity boundary condition immediately follows from the no-slip condition: The normal component
of the vorticity vanishes at the wall:
co3=0
on 9ft.
(6.3.33)
It is worthwhile to note that a consequence of this condition is that at the wall
(u • V)&>3 = (u; • V)w3 = 0. Hence the normal component of the vorticity
equation written at the wall yields
= 0 on S.
dx*
(6.3.34)
Let us now turn to the tangential components of the vorticity. A natural extension of the two-dimensional vorticity flux boundary conditions is to enforce
no-slip for the components u \ and u2 of the velocity by creation of vorticity for
the components co2 and co\, respectively.
This leads to the following three-dimensional version of algorithm (6.3.19)(6.3.24):
Substep 1: Solve the convection diffusion for the three components of the
vorticity with the homogenuous Dirichlet boundary condition for the normal component and homogeneous Neumann boundary conditions for the
tangential components:
^3
^
T
°-
(6.3.35)
Substep 2: Compute the slip (u\, u2) at the boundary.
Substep 3: Repeat substep 1 for the tangential components, with the new
Neumann boundary conditions
dcOi
U2
dcD2
Ml
dx3
At
dx3
At
/ * Q Q ^
Let us now check that this procedure guarantees that the vorticity remains for
all time divergence free: Since (u\, u2) is associated with a vorticity field with
a vanishing normal component, it satisfies
| ^ - | ^ = 0 .
x
x
(6.3.37)
202 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
In addition we observe that writing the Navier-Stokes equation as solved in
step 1 at the wall yields
= 0.
(6.3.38)
Now if we compute the normal derivative of the vorticity divergence at the wall,
we find
—
(diva;) = —l-l)+—l^l)+—J..
(6.3.39)
In view of approximation (6.3.36) and Eq. (6.3.38), this gives
— (diva;) = 0
for x3 = 0.
(6.3.40)
3n
On the other hand, taking the divergence of the vorticity equation solved in
substep 3 gives
9
— (diva;) + (u • V)divu; - vA(divcj) = 0 in V.
dt
(6.3.41)
Supplemented with boundary condition (6.3.40), Eq. (6.3.36) implies that UJ
remains divergence free for all times.
Let us now briefly describe some of the existing techniques for vorticity creation used in vortex methods. Three-dimensional versions of the vortex sheet/
vortex blob method described in Section 6.3 have been implemented, for example, in Ref. 88. They consist of creating vortex tiles parallel to the wall at
the boundary, which then undergo random walk and reflection at the boundary.
As in two dimensions, they are based on the Prandtl equations, and vortex tiles
are transformed into vortex blobs as they leave the boundary layer. Besides
the limitations of this technique already mentioned for the two-dimensional
case related to the validity of the Prandtl model and curvature effects, the
three-dimensional case raises additional difficulties in this scheme. The boundary condition on the normal component is implicitly dealt with by the fact
that vortex blobs entering the boundary layer lose their normal component.
This is, however, at the price of having no normal vorticity at all present
in the whole boundary layer. Moreover the algorithm does not give a clearcut way to control the divergence of the vorticity created at the wall, which
probably makes it inappropriate for simulating strong vortex-wall interactions.
6.3. Viscous Splitting Algorithms
203
.
':'.'''.'
•
:
'
'
'
(a)
(b)
Figure 6.10. Vorticity magnitude isosurface and contours in a cross section of the orthogonal component of the vorticity for a vortex ring hitting a wall at an angle (for clarity
only half of the isosurfaces are shown), (a): t = 24; (b): t = 40; (c): t = 64.
204 6. Vorticity Boundary Conditions for the Navier-Stokes Equations
(c)
Figure 6.10. (Continued)
In a PSE scheme, the boundary conditions derived above [namely Eqs. (6.3.35)
and (6.3.36)] can be implemented in a rigorous way, through integral representations formulas similar to those derived above. The homogeneous boundary
condition - Dirichlet for the normal component, and Neumann for the tangential components - can be treated either by image techniques (which means that
vortex sources with opposite normal components and equal tangential components in a 8 neighborhood of the boundary are used in the PSE formula) or by
a heat potential at the boundary.
Figure 6.10 shows the rebound of a vortex ring hitting a wall at an angle of
30° simulated with this method. The Reynolds number based on the circulation
of the ring and the viscosity is 1400. The cross sections indicate the magnitude
of the component of the vorticity orthogonal to this cross-section. Velocity and
stretching were computed on a Eulerian 1283 grid and then interpolated back
to the particles through a vortex-in-cell approach, as described in Section 8.2.
At this time of the calculation, the number of particles has increased from
6.3. Viscous Splitting Algorithms
205
600,000, to cover the initial ring, to approximately 1.2 million, in response to
stretching, vorticity flux from the wall, and diffusion (regridding based on the
techniques designed in Section 7.2 was done in this simulation at every time
step).
Lagrangian Grid Distortions:
Problems and Solutions
In vortex methods the flow field is recovered at every location of the domain
when one considers the collective behavior of all computational elements. The
length scales of the flow quantities that are been resolved are characterized
by the particle core rather than the interparticle distance. These observations,
which stem from the definition itself of vortex methods and are confirmed by its
numerical analysis, differentiate particle methods from schemes such as finite
differences.
The essense of the method is the "communication" of information between
the particles, that requires a particle overlap. As a result, a computation is
bound to become inaccurate once the particles cease to overlap. Computations
involving nonoverlapping finite core particles should be regarded then as modeling and not as direct numerical simulations. Excluding case-specific initial
particle distributions (e.g., particles placed on concentric rings to represent an
azimuthally invariant vorticity distribution) the loss of overlap (and excessive
overlap) is an inherent problem of purely Lagrangian methods.
The cause of the problem is the flow strain that may cluster particles in one
direction and spread them in another in the neighborhood of hyperbolic points
of the flow map, resulting in nonuniform distributions. At the onset of such
particle distributions no error is usually manifested in the global quantities
of the flow such as the linear and the angular impulse. However, locally the
vorticity field becomes distorted and spreading of the particles results in loss of
naturally present vortical structures, whereas particle clustering results in the
appearance of unphysical ones on the scale of the interparticle separation.
A mathematical explanation of this can be found in the numerical analysis of
Section 2.6. The equation governing the error involves a right-hand side that is
related to the truncation error of the method and that is amplified exponentially
in time at a rate given by thefirst-orderderivatives of theflow.These derivatives
206
7. Lagrangian Grid Distortions: Problems and Solutions
207
are precisely related to the amount of strain contained in the flow. Ultimately,
although the method can in principle be of high order, the strain-related large
constants in the error estimate prevent this order from being achieved in practice.
As we have already seen in Section 2.4, a characteristic example of this
pathology is the simulation of the evolution of an axisymmetric vortex patch by
use of particles initially distributed on a rectangular grid. Although the linear
and quadratic diagnostics of the flow do not exhibit any unphysical behavior,
an examination of the vorticity field reveals unphysical nonsmooth vortical
structures that eventually destroy the whole calculation and the error between
the computed and the exact (steady-state) velocity fields dramatically increases.
It is worth noting that, at least for this particular case, the accuracy deterioration
does not go beyond a certain level. One reason is that it is reasonable to think
that, whatever strain is developed by theflow,the first-order accuracy predicted
in the case of a random initial choice will always hold, as this error does not
involve any derivatives of the flow, but only the fact that the flow is divergence
free. Moreover, in this specific case, because particles are moving on concentric
circles, a minimal overlapping is always ensured.
In a numerical simulation, the clustering and the spreading of the particles
have various consequences, depending on the particular numerical schemes that
are implemented with the vortices. For two-dimensional inviscid flows they result in a loss of accuracy on the computed velocity, which in severe cases can
result in the appearance of undesirable small scales; this has been observed,
for example, for long-time vortex sheet calculations [130], in the evolution of
elliptical vortices, or for periodic turbulence experiments starting for random
initial data [100]. For three-dimensional flows, in regions of high strain the
depletion of particles gets more dramatic as this flow geometry is in general
associated with vorticity intensification. For viscous flows, when the diffusion
is calculated through the PSE scheme defined in Section 5.4 or other related
schemes, constraints on the overlapping of particles are even more severe: If
a given particle does nor overlap with its neighbors, it simply cannot diffuse
its vorticity at all. When, on the other hand, particles accumulate, the local
Reynolds number diminishes, which can lead to numerical instabilities related
to the explicit time discretization of the diffusion term used in this method [64].
To overcome these difficulties there are two possible strategies, which can
be used either independently or combined: The first one consists of restarting
the particles every few time steps at fresh locations where the overlapping is
well controlled. The second one consists of processing the circulation carried
by the particles in order to correct the effect of the distortion of the flow and
allow particles to still give an accurate description of the vorticity. We will
successively investigate these two strategies.
208
7. Lagrangian Grid Distortions: Problems and Solutions
7.1. Circulation Processing Schemes
We discuss here several methods of remeshing that may seem different in nature.
However, they all have as a common strategy the modification of the weights of
the particles, either explicitly for the first method or through quadrature rules
for the triangulated and adaptive quadrature methods.
One may wonder about the justification of modifying the weights of the
particles, since the method is essentially based on the conservation of the circulation of each particle. One argument that can be used here is that the incompressibility of the flow is not satisfied at the discrete level. The discrete notion
of incompressibility requires that the particle density remain constant, i.e., a
constant number of particles is contained in each box for a uniform subdivision
of the domain. In practice, however, this is satisfied only in the limit of infinitesize boxes or an infinite number of points. One may view all the methods that
we will describe as a way to correct the volumes of the particles in order to
improve this aspect of the calculation.
7.1.1. Beale's Method
In this method [20] corrected circulation values are computed at each time step
in order to recover the vorticity field at the particle locations.
Assume that particles, located at (x p ), carry vorticity values UJP. The idea is
to compute circulations f3p such that
qMxp-Xq)
= Wp
(7.1.1)
for all particle of index p. The function £e above is the mollifier to be used,
together with the processed values (/3q), for the computation of the velocity.
It is important to realize that Eq. (7.1.1) is actually a discrete deconvolution
problem. One can thus anticipate difficulties in its solution, in particular when
the right-hand side is not smooth. We will come back to this issue later in this
section.
Let us denote by vq the volumes of the particles and by otq = vqujq their
circulations. If we use the matrix notation [Apq] = [vpt;£(xp — xq)], A is a
sparse N x N matrix, if TV is the number of particles, and Eq. (7.1.1) is given by
A/3 = a.
(7.1.2)
For more than a few hundred particles, the size of the matrix does not allow for
a direct inversion and one has to resort to iterative methods for the solution of
the equations. The iterative procedure suggested by Beale to solve Eq. (7.1.1)
7.1. Circulation Processing Schemes
209
IU
y
10"2
J
o
WWWVYWW
:
J^P
o
v
0
o
o
o
10"3
^
\
/
o
O
\
/
y ^
/
y
-
/
O
O
in-<
BOOGOCr
i
10
15
20
25
30
35
40
45
50
Time
Figure 7.1. Improved accuracy through iterations (7.1.3) for the vorticity co(x) — (1 —
|x| 2 ) 3 . Solid curve, original scheme, e = 3h; A, original scheme, s = 2h; Q, Beale's
method, s = 2h; dashed curve, Beale's method, s = 3h.
is based on the observation that the circulations a.q are natural guesses for (3q;
in other words A ~ /, where / denotes the identity. Rewriting Eq. (7.1.2) as
/3 = a
(A-
leads thus to the following natural iterations:
/""•>W - I - 1
/'"I/?
^
(7.1.3)
Two-dimensional calculations based on circular-patch explicit solutions show
a dramatic improvement in the accuracy of the velocity when only two or three
iterations (7.1.3) are performed. Figure 7.1 illustrates that this improvement
appears even at the initial stage. Iterations (7.1.3) are therefore sometimes used
to prepare the particles to better fit the initial vorticity field. The main feature of
iterations (7.1.3) is, that the gain in accuracy remains all along the calculation
despite the distortions developed in the particle distribution. This procedure is,
however, rather sensitive to the value of the ratio s/h (it is clear in Figure 7.1
that the performance of the iterations is better for s/h = 3 than for s/h = 2).
210
7. Lagrangian Grid Distortions: Problems and Solutions
As noted by Beale, one has to be aware that the sum on the right-hand side
of Eq. (7.1.3) is in principle infinite, as particles having initially no circulation
may receive some. Even when the vorticity has compact support, in some cases
one has to be careful to lay ghost particles in an s layer (if e is the width of the
cutoff support) around the nonzero-strength particles.
The iterative method of Eq. (7.1.3) has been also successfully tested in the
context of PSE schemes by Choquin and Lucquin-Desreux [47]. In this case the
processed weights are used inside the integral, giving the amount of vorticity
exchanged by the particles. Of course the PSE scheme must be applied to the
original weights and not to the processed weights; if n processing iterations of
Eq. (7.1.3) are performed at a given time step, circulations are updated through
f
The analysis of Beale's technique for the two-dimensional Euler equations
reveals some interesting features. It is possible to prove that the iterations affect
both error sources involved in the vortex method: the particle discretization and
the regularization. If the original cutoff is of order r, it turns out that performing
m iterations of Eq. (7.1.3) amounts to using a cutoff of order mr, and the error
estimate proved in [20] is
u-u/, = O(emr).
(7.1.4)
An alternative point of view on the convergence of iterations (7.1.3) is given by
a Fourier analysis, assuming that the particles lie on a uniform (one dimensional
for simplicity) mesh, with mesh size h. If we denote by a and J3 the discrete
Fourier transforms of ex and /3, Eq. (7.1.2) is equivalent to
He
On the other hand the iterative scheme of Eq. (7.1.3) can be rewritten as
/ f + 1 = a + /f(l-fc&),
(7.1.6)
which gives
(3 = a
1 _(!_/£)*
^
Hs
.
(7.1.7)
We thus recover Eq. (7.1.2) for n tending to infinity, provided that f has a
positive real part.
7.1. Circulation Processing Schemes
111
Formula (7.1.7) further allows us to predict the speed of convergence of
iterations (7.1.3). Note first that, because of the aliasing errors (which will be
analyzed later), the smoothness of £ does not imply that lE(k) tends to 0 as A:
tends to infinity. This means that the discrete deconvolution problem (7.1.1), or
its Fourier version (7.1.5), is better behaved than the continuous one. However,
the iterations can be very slowly convergent, depending on the parameter values.
More precisely, assume that £ has a bandlimited Fourier transform Tt, with, say,
a unit bandwidth. Further assume that ey>>h, which is the usual overlapping
condition that has to be satisfied in vortex methods. In one dimension, the
discrete Fourier transform of £e can be written as
This shows that the denominator of Eq. (7.1.5) can vanish for wave numbers of
the order of l/e. The discrete deconvolution problem then becomes ill posed,
unless OL itself has vanishing Fourier modes for k > l/s (which would mean
that the vorticity is analytic).
In more realistic situations in which the Fourier transform of the cutoff is
not bandlimited, but decays fast at infinity - because of its smoothness - if its
Fourier transform is positive (as for a Gaussian), one never strictly runs into the
above ill-conditioning problems. However, the right-hand side of Eq. (7.1.5) still
gets small denominators for wave numbers of the order of l/s, implying slow
convergence for Eq. (7.1.3), except if the corresponding Fourier coefficients of
the vorticity are small. Another observation is that increasing the overlapping
of particles has the unpleasant effect of making the solution of Eq. (7.1.2) more
difficult, except if one can make sure that the vorticity is smooth (which is
the case in the radial vorticity test we have shown), in which case there is a
compensating effect in the decay of the Fourier coefficients of the cutoff and of
the vorticity.
To summarize, lack of regularity of the vorticity and strong overlapping are
two factors that can substantially slow down the iterations, which makes this
method difficult to use in many practical situations. This confirms observations
of Winckelmans and co-workers in the context of three-dimensional flows (see
Refs. 200 and 201 and Section 3.4). Efficient procedures to invert system (7.1.1)
are still a current research topic.
7.1.2. Triangulated Vortex Methods
Although this method has been originally proposed in a more general context
[41], we chose to present it here as we believe that its main interest is to give
an elegant way to deal with distorted particle distributions.
212
7. Lagrangian Grid Distortions: Problems and Solutions
The method is actually reminiscent of the Free Lagrange methods. It consists
of constructing at each time step a triangulation whose nodes are the particle
locations.
We are concerned here with two-dimensional flows. The circulations of the
particles in this case remain unchanged, and the first task is to derive on this
triangulation a piecewise linear interpolation to these circulations.
If r is a given triangle, one has to deal there with a vorticity field of the form
(Dh(x) = a + bx\ + cx2.
The coefficients a, b, and c can be easily obtained from the coordinates of
the vertices of the triangle and the vorticity values at these points. In view of
the Biot-Savart law, the computation of the velocity will then be obtained by
addition of the contributions of each over a triangle integral:
K(x-y)coh(y)dy.
The calculation of these integrals breaks down to evaluating the quantities
y[yidy,
forO<i+j<l.
(7.1.8)
These can be computed analytically in polar coordinates. The efficiency of the
overall procedure is then conditioned by
• the accuracy of the piecewise linear interpolation,
• the computational cost of the repeated triangulations,
• the possibility of using a fast code to compute the integrals of Eq. (7.1.8) for
all triangles r and all particles x.
Let us address these issues successively. Concerning the first point, we remark
that this is a classical problem in finite-element analysis. We derive the interpolation error by mapping each triangle onto a reference triangle. The error
estimates are then driven by the derivatives of the mapping, which themselves
can be evaluated in terms of the size of the triangle.
For a piecewise linear interpolation, one typically gets
(we refer to Appendix A for the norm notation), where /i max denotes the maximum size of the triangles. Note that the desingularization of the particles is implicitly done in the linear interpolation step, and there is no further need to introduce any cutoff for the velocity evaluations. The O(h2) accuracy is a definite
advantage over vortex blob methods that use second-order cutoff, which would
7.1. Circulation Processing Schemes
213
yield O (s2) accuracy with s^>h. However, we have seen in Section 2.6 that the
control of the flow derivatives appears in an essential way in the convergence
proof [see estimate (2.6.4), for example]. In the context of the triangulated
method, these estimates are classically obtained through so-called inverse inequalities, which involve the internal diameters of the triangles. Stability of
the method thus requires that all sides of the triangles be approximately equal
lengths so that the triangulation is regular. For the simplest choice, which would
be to connect the initially neighboring particles, the stretching of the flow map
would result in stretching the triangles (or increasing their aspect ratio) in such
a way as to deteriorate the theoretical second-order accuracy.
As a remedy, Russo and Strain [176] suggested a strategy based on Delaunay
triangulations. Given a cloud of nodes to connect, the principle of these triangulations is precisely to optimize the aspect ratio of the triangles. There are
several possible ways to construct fast Delaunay triangulations. One popular
way is through the construction of so-called dual Voronoi polygons, which are
defined as
Pi = {x; |x - X,-1 < |x - Xj I for all j ^ i } ,
where Xj are the particles. Delaunay triangles are then obtained by connecting
points whenever they belong to adjacent polygons (see Figure 7.2).
Figure 7.3 shows the Delaunay triangulation built on particles rotating on
circles of different speeds, subject to a vorticity co{r) = (I — r 2 ) 7 , together
with the triangulations obtained by following the initial triangulation along
the flow map. The gain in regularity is evident. Except for a few triangles at late
times, the Delaunay triangulation essentially remedies the distortion due to the
stretching of the flow map and effectively leads to a triangulated vortex scheme
that is second-order accurate. This is confirmed by Figure 7.4, which shows
the velocity errors corresponding to the two types of triangulation. While the
effect of the distortion in the original triangulation is a deterioration in the
accuracy, the Delaunay triangulation allows us to stabilize the error.
Let us now discuss the computational complexity of triangulated methods.
The construction of Delaunay triangulations always involves a distance minimization step. This minimization can be efficiently done in O(N) operations if
particles are presorted in cells, so that the search is limited to neighbors. The
cell division goes together with a linked list similar to the one needed by all fast
solvers (see Appendix B). If the particle distribution is highly nonuniform it
may, however, happen that the optimization cost degenerates to the O (N2) worst
case. To balance the calculation load among all cells optimally and further speed
up the calculation, Russo and Strain use an adaptive strategy to make sure that
214
7. Lagrangian Grid Distortions: Problems and Solutions
l
/
Figure 7.2. Voronoi and Delaunay diagrams associated with a set of particles.
all cells contain approximately the same number of points. Although this adds
to the complexity of the algorithm, this strategy allows us to gain a considerable
speed up for N > 200. Timing results reported by Russo and Strain indicate
that the triangulation time is less than one tenth of the velocity evaluation time.
This leads us to the third issue raised above concerning the fast evaluation of
velocities. Fast solvers of the kind described in Appendix B have not been implemented, as the triangulations hinder the transfer of the multipole expansions,
therefore making difficult the construction of tree data structures.
However, the computational cost of the velocity evaluations can be reduced
by use of a single level of refinement in these calculations. First, on dividing the
computational domain into Nc cells, one can split the velocity into a local- and
a far-field component. When necessary, cells are refined so that their borders
are not crossed by triangle edges. The local component resulting from triangles
7.1. Circulation Processing Schemes
215
Figure 7.3. Lagrangian (top row) and Delaunay (middle row) triangulations for the
evolution of circular patches at times 0, 27r, and An. The bottom figures correspond to
the Delaunay triangulations at later times (t = 87r, \6TT, and 327r)(courtesy of J. Strain).
in a given cell is computed directly. For the far-field component,
K ( X
-x')
one expands K(x - x') in a Laurent series about the center of the cell containing
x; in complex notations, up to a 2n factor,
1
1
z c
00
- tT0^z~c
If p terms are retained in the expansion [where p is related to the desired
216
7. Lagrangian Grid Distortions: Problems and Solutions
u.u
g
-2.0
o
-4.0
ror
CD
>
a5
E
LUIXBL
f
-6.0
-8.0
-10.0
0.0
5.0
10.1
15.1
20.1 25.1
15.1
20.1 25.1
Time
(a)
" 1 2 "°0.0
5.0
10.1
Time
(b)
Figure 7.4. L°° relative error forthe velocity in the triangulated vortex method for various
mesh sizes by use of (a) a Lagrangian triangulation or (b) a Delaunay triangulation for
a circular patch where co(x) = (1 — |x| 2 ) 7 (courtesy of J. Strain).
accuracy e by p — O(log s)] the far field is thus given by
(7.1.9)
Cjz TcC n=0
where the coefficients d% have the form
/\z'-c)na>(z')dz'.
Jc
7.1. Circulation Processing Schemes
217
Since the vorticity is known as a polynomial of degree 1 on each triangle, one
has to evaluate only the terms
f
JTT
for 0 < a, P < 1. If TV is the number of triangles, the coefficients d% are
evaluated in O(pN) operations and expansions (7.1.9) for all vertices require
O (pNNc) operations. For a relatively uniform particle distribution the optimal
value of TVC is TV1/2, yielding 0(TV3/2 logs) operations.
A further speed up of the algorithm can be obtained if the above Laurent
series is translated into Taylor series. We refer to Ref. 176 for details. The
resulting algorithm has an O(TV4//3) computational cost.
In closing this section, let us mention that the triangulated method can be
adapted to allow local refinements in the spirit of finite-element methods (see
Ref. 41 for details).
7.1.3. Adaptive Quadrature
Besides the technical difficulties that one would face in implementing the
method in three dimensions, one drawback of the triangulated vortex method
just described is that it is limited to second order. From this point of view,
the method proposed by Strain [191] that we now describe can be seen as a
generalization of the triangulated vortex method.
Since particles give access to only pointwise values of the vorticity (although
one can imagine particles carrying informations about derivatives as well), it
is hard to propose higher-order triangulated vortex methods, unless one goes
to some kind of macroelements that would combine several triangles together.
Adaptive quadratures are in this spirit while avoiding as much as possible
technicalities that in general go with macroelements.
The second order of the triangulated vortex method was related to the fact
that vorticity values yield exact quadrature for linear functions on triangles. The
idea is therefore to construct quadrature rules that are exact for polynomials
of arbitrary degrees. To get order p accuracy for the quadrature rule requires
exactness for polynomials of a degree less than or equal to p — 1 and thus m =
pip + l)/2 degrees of freedom (assuming that we are in two dimensions). In
principle one thus should divide the computational domain into cells containing
m points a7 and find quadrature weights Wj in each cell B so that
x"x% dx = y2 WJ (ai)a {aiY
B
for all a, p such that a + p < p.
j
(7.1.10)
218
7. Lagrangian Grid Distortions: Problems and Solutions
Even so, a solution of this system does not necessarily exist. For example, if
all points are on the same line, say the x axis, they will not give any information
concerning the dependence on the y direction. The method suggested by Strain
is to design a tree data structure across all particles dividing the computational
domain into cells containing morm + 1 points. System (7.1.10) is then solved in
the least-squares sense. If the solution yields large values for the weights, the cell
is merged with its neighbor, thus increasing the number of quadrature points, and
the procedure is repeated. The accuracy of the quadrature rule is then O(HP),
where H is the side of the largest cell resulting from this merging procedure. Of
course this technique does not require any particular treatment, compared with
classical fast solvers (see Appendix B) for the fast evaluation of the velocities.
Figure 7.5 shows the relative L 1 velocity errors obtained for the circular patch
20.0
12.8
c
o
9.6
0
0
>
-Mr,
6.4
J5
0
3.2"
8>
0.0
0.0
5.0
10.0
Time
15.0
20.0
(b)
Figure 7.5. L' relative errors for the velocity with the adaptive quadrature method for
various mesh sizes for (a) p = 4 and (b) p — 6; co(x) = (1 - |x| 2 ) 3 (courtesy of
J. Strain).
7.2. Location Processing Techniques
219
coo(x) = (1 - |x| 2 ) 3 when an adaptive quadrature method corresponding to
p = 4 or p = 6 is used. It shows that in this case the adaptive strategy allows us
to maintain the desired level of accuracy all along the calculation.
Adaptive quadrature techniques raise two issues. First, the computations of
the quadrature weights can be seen as a processing of the volumes of the particles
in order to correct the effect of the strain in the particle distribution. A similar
interpretation could have been done for the triangulated vortex method, except
that this method differs from regular vortex methods by a particular way to
desingularize the particles (as a matter of fact, this is the only difference between
the triangulated vortex method and the adaptive quadrature method for p = 2).
A second comment, which is valid for all the methods described in this
section, is that this method performs well as long as the strain does not take
apart particles too much (that is, here, as long as H remains of the order of h).
This is the case for circular patches, but in more severe situations, such as flows
with saddle points (e.g., boundary layers, shear layers), it seems unavoidable
to regrid the particles during the simulation.
7.2. Location Processing Techniques
We are interested here in replacing the (occasionally) strained grid distribution
with a new Lagrangian regular grid and simultaneously transporting accurately
the vorticity from the old grid to the new. As a matter of fact, this is a situation
that we have already encountered in two dimensions (the vortex sheet calculations of Section 2.1) and in three dimensions (shear layers and jet calculations
of Section 3.2). In both cases it was important to compensate for the strain in the
flow by continuous insertion of new elements. The particular geometry of the
flow, however, enabled us to do it in a rather simple and efficient way through
a monitoring of the distance between adjacent elements. The strength of the
new elements in these cases can be obtained by simple, low-order interpolation
without any spreading of the vorticity outside the support of the vorticity.
For more general flows or when it is not possible to keep track of the connectivity of the elements (because of the diffusion, for example) one must
clearly be more careful in the way circulation is assigned to the new elements.
In the following we consider the one-dimensional problem and in particular the interpolation of scalar quantities (such as the vorticity field in twodimensional flows), bearing in mind that all the techniques described below
apply in a straightforward way to any dimension, by using simple tensor product formulas.
We denote by (xp) and (xp) respectively the old (distorted) and the new
(regular) particle locations, and we denote by cbp, Vp and cop, Vp the local
220
7. Lagrangian Grid Distortions: Problems and Solutions
vorticity values and circulations at the old and the new locations. The new
particles are assumed to lie on a grid with spacing h. The natural way to compute
Fp is through a classical interpolation rule:
£ ( ^ )
(7.2.1)
In the above formula, W is an interpolation kernel whose properties determine
the type and the quality of the interpolation. For reasons that will be subsequently clear, we will immediately require that the function W satisfies
To measure the discrepancy between the old and the new particle distributions,
we multiply the above quantity by a test function 0 (which in practice may be
thought of as a blob function, for the evaluation of the vorticity, or a regularized
Biot-Savart kernel for the evaluation of the velocity). We get
E =
p
P
which, by virtue of Eq. (7.2.1), becomes
/
^F— /- V
A fp
Y„ —
\
(7.2.4)
p
We have thus to evaluate the function
f(x) =
^
q
Because of Eq. (7.2.2), this can be rewritten as
' xa - x
Taylor expansions of 0 yield
a.
X„
q
7.2. Location Processing Techniques
221
From this formula it results that if W satisfies
q
then
f(x) = Oihm),
and the regridding procedure will be of order m.
It is worth noting that moment conditions (7.2.5) can be seen as the discrete
analog of the ones encountered in the definition of cutoff functions. Note also
that conditions (7.2.5) are equivalent to the conditions
) =xa
forO<|a|<m-l
(7.2.6)
q
[this is seen when (JC — xq)a is developed and moment properties are used
at previous orders], which means that the interpolation formula is exact for
polynomials of a degree less than or equal to m — 1 (we then say that it is exact
to the degree m — 1 or, equivalently, of order m) and brings us into the classical
analysis framework for interpolation formulas.
Finally conditions (7.2.5) can also be interpreted in terms of conservation of
moments for the particle distributions. For m = 2, for example, one can deduce
from Eq. (7.2.5) that
p,q
rq[(x - ~xq) + (xq -
Xp)]w
x -x )\v (Xp
~Xq
p
This identity expresses the conservation of the linear impulse [condition (7.2.2)
immediately implies the conservation of total circulation] when one is switching
222
7. Lagrangian Grid Distortions: Problems and Solutions
from the old to the remeshed distribution. Conservation of higher moments
would follow along the same lines from higher-order moment properties of the
interpolation kernel.
We now come to the construction of more efficient interpolation kernels.
We note in passing that this work will be useful in defining vortex-in-cell
schemes and, more generally, techniques that require exchanging information
between a regular grid of finite-difference type and a Lagrangian particle grid
(see Chapter 8).
7.2.7. Interpolation Formulas: General Definitions and Fourier Analysis
To facilitate the analysis we restrict our attention to an equispaced regular grid
with unit mesh size onto which we map the quantities of interest.
The general interpolation formula in one dimension then is given by:
Q(x) = ^qn
W(x-n).
(7.2.7)
n
Let us introduce here some vocabulary from interpolation theory. We say that
Eq. (7.2.7) is an ordinary interpolation formula if Q(x) interpolates exactly the
given ordinates qn, i.e., if
l,
W(n)=0,
(n#0),
or, alternatively,
Qin)=qn.
Interpolation formulas that do not have this property spread the value qn among
the neighboring grid points and are thus referred to as smoothing interpolation
formulas.
Following Schoenberg [184], we analyze the properties of the interpolating
functions through their behavior in the Fourier space. The characteristic function
g(k) of the interpolating (even) function W(x) is defined as
g(k)
= /
W(x)e~ikxdx.
J— 00
We assume that g is a smooth function, which means that W decays fast at
infinity, a condition that is always satisfied in practice. A justification of this
function lies in the following result, which provides a useful criterion to check
the accuracy of interpolation formulas.
72. Location Processing Techniques
223
Theorem 7.2.1. Consider the interpolation formula
+ 00
Q(X) = Y, I" Wi-X - *«)•
—oo
Let the interpolating function W(x) decay fast enough to satisfy the condition
IWQOI < Ae~Blxl,
where A > 0, B > 0.
The formula is of degree m if the following two conditions hold simultaneously:
g(k) — 1 has a zero of order m at k = 0,
(7.2.8)
g{k) has zeros of order m at all k = Inn (n / 0).
(7.2.9)
Proof. From the definition of g we may write that
i{k+2nn)y
dy
[ °° W(y)e-
=
J—oo
Now, by multiplying both sides by e2ninx and summing over all n to take into
account all the alias coefficients, we get that
+ OO
/>+OO
e2ninx
-00
/
+°°
w(y)
e-i(k+2nn)y dy
=
X^ e2ninXg(k + Inn).
-00
" - ^
By Poisson's summation formula we obtain
+00
+00
and finally
+OO
+00
ikx
llzinx
53 eik" w(x -n) = eeikx
Y,
g(k + Inn).
Y eellzinx
Note that for x = 0 the above formula provides a classical relation between the
Fourier transform of the discrete smoothing formula and the continuous Fourier
transform of the smoothing function as J2-Z eiknW(n) = Yl-™8(k + 2nn).
Now, by fixing x and expanding the left-hand side of the equation, we obtain
v=0
224
7. Lagrangian Grid Distortions: Problems and Solutions
On the right-hand side, assumption (7.2.9) implies that the terms g(k + 27in)
e2ninx for n _£. Q^ a ^ t e r e X p a n s i o n around Inn, do not contribute any terms in k
of order less than m. So the equation becomes
v!
^
- t t ) = eikxg{k)
+
—oo
v=0
Assumption (7.2.8) allows us to expand g(k) around k = 0 to get
g(k) = 1 + 0{km).
Expanding elxk, we finally may write
nvW(x — n) =
v=0
'
-oo
v=0
It remains now to identify the coefficients of the successive powers ofk on both
sides of the above equation to obtain that the interpolation formula is exact to
•
the order m — 1.
It should be observed that assumption (7.2.8) translated back in the physical
space is just the moment properties
f W(y)dy = 1,
f yaW(y)dy = O, if 1 < |a| < m - 1.
This is not surprising, since Eq. (7.2.6) can be rewritten as
In view of quadrature estimate (A. 1.3) proved in Appendix A, the above lefthand side can be estimated as
[xaW(x)dx
+ 0 (hm W (-)
) = f xaW(x)dx
Letting h tend to 0 gives the continuous moment properties for W. The additional
conditions (7.2.9) are needed as a result of the sampling that has to follow the
convolution in the interpolation process.
As a matter of fact, a related point of view on interpolation accuracy is given
by Hockney and Eastwood [103], based on a splitting of the interpolation error
into a convolution and sampling errors. The sampling, or aliasing error, in the
Fourier space can be evaluated as the sum of the contribution of modes that are
7.2. Location Processing Techniques
225
separated by a multiple of the grid size. More precisely, if qn are the values taken
by a smooth function q and if we define the continuous interpolated quantity as
Qc(x) =
[q(x')W(x-x')dx',
whose values at x = xp give the mesh-defined function, its discrete and continuous Fourier transforms are linked through
Q(k) =
The contribution from the nth term is called the nth alias contribution and the
sum is called the alias sum (these concepts have already been encountered
in the discussion of Beale's method in Section 7.1). On sampling values of
the continuous function on the grid locations, the mesh has no clear way to
distinguish between the principal harmonic and its aliases, thus overestimating
or underestimating the correct value of the interpolated function, depending on
the phase of the primary harmonic and its aliases. In the physical space the effect
of aliasing may be described as loss of information due to the finite size of the
grid. This loss of information is dependent on the mesh size and the smoothness
of the interpolating function. In the physical space, smoothness is related to the
number of continuous derivatives of the interpolating function, while in the
transformed space it is translated as the rate of decay of the transform (and
hence the order of the low-pass filter). A function W that is continuous in all
derivatives up to the nth has a transform W(k) that decays as £~ (n+1) .
Following Hockney and Eastwood [103], we may explain the smoothness
constraint in the context of low-pass filters. Consider a smooth function Qc that
has a transform that is bandlimited in the interval [—(k c/2), kc/2]. Now if we
use a grid with size h such that the grid wave number kg = 2n/h is such that
kg > kc, then the smooth function is being oversampled. We are in principle then
able to recover the correct function without aliasing effects, although at some
excessive computational cost (unnecessarily small h). The function would be
critically sampled (at a minimum possible computational cost) when h is such
that kg = kc. Beyond this critical spacing the function would be undersampled
and the function we recover would be modified by the contribution of the aliases.
So from the above analysis we see that the grid spacing is the main factor that
determines the possibility for the accurate interpolation of a function, depending
on the smoothness of the interpolated function. One may note here that through
the overlap constraint the present analysis is linked to the particle core size. In
order to take full advantage of the computational grid we need also interpolation
226
7. Lagrangian Grid Distortions: Problems and Solutions
schemes that would act as low-pass filters with a finite bandwidth removing all
the harmonics that are larger than kg. An ideal low-pass filter in the transformed
space would then be the function
ro,
W(k) = Tl(k/kg) = I 1/2,
[ 1,
if*/*, > 1/2
if k = kg
if k/kg < 111
It is then easily seen that this function would totally suppress the alias contributions. Conditions (7.2.8) and (7.2.9) are satisfied at any order. Unfortunately,
the above bandlimited transform corresponds to a function that is not limited
in the physical space as it is the transform of the function
h
(x/2h)
Hence the complete alias elimination would imply interpolation to all mesh
points as this function has a very slow decay. Such a dealiasing operation would
therefore lead to a computationally impractical scheme. Good interpolation
schemes then are those that are bandlimited in the physical space (thus involving
a few interpolating points and hence few operations) and at the same time are
close approximations of the ideal low-pass filter in the transformed space.
A measure of the effectiveness (s) of the interpolating scheme in a given
computational grid to eliminate the effect of aliasing is given by the relative
magnitude of W at the principal wave number and its alias, i.e.,
s =
W(k)
(7.2.10)
The rest of this section is devoted to the derivation of interpolation formulas
of practical use. We will adopt successively two points of view. In the first
one we will construct interpolation kernels of increasing smoothness, while in
the second one we will try to optimize the shape of the kernel with respect to
conditions (7.2.8) and (7.2.9).
7.2.2. Smoothing Interpolation Formulas
As the first classical example let us consider the piecewise linear interpolation
function given by
ifx < - 1 orx > - 1
W(x)={l+x
if-l<*<0
ifO <x < 1
7.2. Location Processing Techniques
227
The characteristic function of this equation may be expressed as
g(k) =
nk
which has zeros of multiplicity 2 at k = ± 1 , ±2, ± 3 , . . . , which means that
condition (7.2.9) is satisfied for m = 2. Moreover, direct expansion of g(k) for
small k gives that
g(k) = 1 + 7 r 2 / : 2 / 6 + - - so that condition (7.2.8) is also satisfied, and the above interpolation formula
is then exact for linear functions. The form of this interpolation formula in
Fourier space suggests a certain class of splines, the so-called B-splines, that
may be used for interpolation with a desired degree of smoothness. Their Fourier
transform is given by the formula
As m increases, the decay of the Fourier transform at large wave numbers
gets faster, resulting in smoother functions and less severe aliasing effects. The
effectiveness coefficient e of the mth B-spline, as given by formula (7.2.10), is
-(ra+1)
In the physical space, the smoothing function is obtained through successive
convolutions of the top-hat function (which itself corresponds to m = 1). For
a given m one obtains a piecewise polynomial of degree m - 1, which is of
class Cm~2 and with support extending to 2m — 3 grid points (in two or three
dimensions this number should be raised of course to the power 2 or 3). For
m = 2 we recover the tent function, which is associated with the so-called
cloud-in-cell interpolation scheme for vortex-in-cell methods (see Section 8.1):
)
—
|JC|
if |JC| > 1
if not
For m = 3, the piecewise quadratic function is sometimes referred to as the
TSC (for triangular-shaped cloud) interpolation function:
if
M3(x)={
| ( - W + 3/2)
2
2
\(x + 3/2) - \(x + 1/2)
|JC|
> 3/2
ifl/2<|jc|<3/2.
2
if 0 <
|JC|
< 1/2
228
7. Lagrangian Grid Distortions: Problems and Solutions
1.25
1
1 /
/
0.75 -_
/
/ '
•'•'
• • ' /
\
-
-
M1
M2
M3
M'4
\
\
\
N
'
'
\
/
0.5
/
</
0.25 -
/'il
:/
-0.25
-
2
-
\
1
0
1
2
Figure 7.6. B-splines of increasing smoothness and the M'A function.
These functions are presented in Figure 7.6. For a formula giving B-splines in
a systematic way, we refer to the book of Hockney and Eastwood [103].
Note now that, based on Theorem 7.2.1, the B-splines can interpolate only
exactly linear functions as the Fourier transform of the rath-order spline has a
zero of order ra for k = ± 1 , ± 2 , . . . , but has a zero of only multiplicity 2 for
k = 0. So although with increasing order they improve the smoothness of the
interpolating quantity on the grid from the possibly scattered particle locations,
their accuracy is limited to second order.
Monaghan [156] has presented a systematic way of increasing the accuracy
of the interpolating functions while maintaining the smoothness properties. His
idea, which is based on extrapolation, is actually reminiscent of a technique
we mentioned in Section 2.3 to construct higher-order kernels through a combination of a cutoff and its radial derivative. If W is an interpolation kernel of
second order and class Cm~l with ra > 3, consider the new kernel
W(x) = -(3W + xW).
It is readily seen from integration by parts that this kernel has a vanishing secondorder moment. Moreover, if W is the B-spline %*(m\ its Fourier transform has
(sin £/£) m in factor and FWf = %FW has (sin ?/?) m ~ 1 in factor. We can thus
conclude that, if ra = 3 or ra = 4 , the interpolation will be exact for quadratic
functions, and the interpolation will be third-order accurate. If ra > 5 it will
7.2. Location Processing Techniques
229
be fourth-order accurate. For reference we present here the original and the
improved interpolating formulas that correspond torn = 4:
0
if|jc|>2
l
M4(x)={ e(~M +2)
3
ifl<W<2,
3
3
-|x|+2) -f(-|*l + D
{
0
if |JC| < 1
if|*|>2
i(2-\x\)2(l-M)
_5^
+
ifl<|*|<2.
3|p
if |JC | < 1
(7.2.11)
This last formula has been used with significantly improved results in SPH (for
Smooth Particles Hydrodynamics) simulations by Monaghan [155, 156]. We
will see below that it is also a very efficient tool for vortex simulations in two
and three dimensions. The function M\ is plotted in Figure 7.6.
7.2.3. Ordinary Interpolation Formulas
In this type of formula the goal is to treat directly algebraic system (7.2.6),
prescribing the exactness of the interpolation for a given degree while somewhat
relaxing the smoothness constraint. If we set Wt = W(x - x/), this system can
be rewritten as
If P is the number of grid points in the support of W, we have P parameters
allowing us, in principle, to satisfy up to P moment conditions. Rewriting Wt
in terms of W then yields the desired interpolation function. For P = 2 we find
(again) the tent function, which allows us to conserve the linear impulse and is
second order. For P = 3, we obtain the third-order interpolation function
A 2 (JC) =
^ (1 -
.0,
ifO < x < 1/2
JC2,
*)(2
-
JC)/2,
if 1/2 <JC < 3 / 2
otherwise
.
(7.2.12)
230
7. Lagrangian Grid Distortions: Problems and Solutions
% Old p a r t i c l e
+ New p a r t i c l e
J+2
J+l
1-1
1+1
WALL
Figure 7.7. Remeshing in a bounded domain.
This function has been successfully used by several authors [125, 187]. For
P •=• 4, the result is Everett's fourth-order formula:
( (1 - x2)(2 - x)/2,
A3(x)
=
I (1 -
JC)(2 -
10,
JC)(3 -
ifO < x < 1
JC)/6,
if 1 < x
<
2.
otherwise
One interesting feature of this construction is that it allows some flexibility
in dealing with bounded domains (so far all our interpolation formulas were
derived in the absence of boundaries).
When boundaries are present the remeshing procedure is complicated as the
new mesh points have to be outside the body. It is obvious then that the schemes
used for an unbounded domain have to be modified for particles that are located
in an (/, / ) cell that is adjacent to the boundary. A scheme similar to the A2
scheme described above requires again nine points and conserves the same
quantities as for the unbounded case. In Figure 7.7 the nine cells affected by a
cell adjacent to the wall are shown. The interpolating kernel is again the product
of two one-dimensional forms, but now
with A/ = A 2, and
Aj
=
v(2-v)
v{v -
10,
for cells J
for cells J + 1
for cells / + 2,
for all other J
7.2. Location Processing Techniques
231
where v = (x — xf)/h, x' is the center of the cell next to the boundary and /
here denotes the off-boundary direction.
Note that the kernels derived so far in this section do not have continuous
derivatives. The second-order kernel is not even continuous. This implies that
when interpolating quantities having large fluctuations for small particle separation they might introduce large interpolation errors from small errors in the
actual particle locations. As a consequence one has to be careful when using
these interpolation kernels not to allow too important distortions in the particles, which implies frequent regridding. By contrast, the M'4 scheme [formula
(7.2.11)] achieves the same order of accuracy, but with a greater smoothness. (It
is of class Cl.) This makes it more flexible regarding the frequency of remeshing.
To illustrate this point, we show several calculations of the evolution of an
elliptical vortex patch. The dynamics of this particular flow, already considered
in Section 2.4, eventually produces very high strain that results in ejection of
thin filaments of vorticity. It is impossible to resolve reasonably these filaments
without regridding the particles. Figure 7.8 shows vorticity values along the
principal axis of the ellipse obtained with the A2 scheme and the M4 scheme.
Both formulas were used with a frequency of one remeshing every four time
steps. The A2 scheme does allow us to capture the filaments but produces overshoot and oscillations that are avoided by the M\ scheme. Figure 7.9 shows the
number of particles as a function of time and the enstrophy obtained with the
remeshing formulas. They indicate that the smoother results obtained by the M 4
formula do not go with an increased spreading of the vorticity. Both formulas
lead to an enstrophy decay of ~4%, which is fairly low, given the steep gradients
produced by its dynamics and the small number of points in this simulation.
Figure 7.10 shows a comparison of how the minimal numerical dissipation
introduced by the M4 formula allows high-resolution vortex simulations, indicating that an initially elliptical vorticity profile may relax in an inviscid flow
to a nonaxisymmetric configuration in agreement with the analysis and experiments of Driscoll and Fine [74]. More details on these calculations can be found
inRef. 127.
The case of a circular patch, already considered several times in this chapter,
although less severe than the ellipse just considered, allows us to quantify the
accuracy of the remeshing procedure. Figure 7.11 compares the L2 particle
velocity error for coo(x) = (1 — |x| 2 ) 3 when no-remeshing, the A2 remeshing,
and the M'4 remeshing formulas are used. These curves indicate that, when the
initial grid is refined, the M'A scheme does allow us to retain the gain in the
velocity accuracy for all times.
A conclusion of these tests and of other simulations for a variety of twoand three-dimensional flows is that the M4 formula provides a fairly good
0.6
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
0.8
1
1
Figure 7.8. Effect of remeshing on the vorticity of an elliptical vortex: vorticity on the
axes of (a) an ellipse, remeshing formula A2 (7.2.12); (b) remeshing formula M'A (1.2.11)
(courtesy of M. L. Ould-Salmi).
Figure 7.9. Effect of remeshing on the vorticity of an elliptical vortex: (a) number of
particles, (b) enstrophy for A2 (dashed curves) and M'A (solid curves) formulas (courtesy
ofM. L. Ould-Salihi).
234
7. Lagrangian Grid Distortions: Problems and Solutions
(a)
(b)
Figure 7.10. Comparison of the asymptotic state of an inviscid ellipse simulation (b) by
vortex methods with the remeshing M\ [127] (a) with the experimental results of Driscoll
and Fine [74].
7.2. Location Processing Techniques
235
Figure 7.11. Error curves for coo(x) = (1 — |x| 2 ) 3 : no remesh, h = 0.1 (solid curve); no
remesh, h — 0.05 (dotted curve); remeshing A2 (A); and remeshing M\ (Q).
compromise between accuracy and smoothness. Near walls, it is possible to
combine the M\ scheme in the directions parallel to the wall and the A2 scheme
in the direction normal to the wall. Note that, in the case of no-slip boundary
condition, the sensitivity of the A2 scheme to excessive distortion in the particle
distribution has minor effects in this case when it is used in the normal direction:
By the continuity condition, the normal derivative of the normal component of
the velocity vanishes at the boundary, and thus the strain essentially acts in the
directions parallel to the wall.
To conclude this subsection, let us mention several side effects of remeshing
techniques. In three-dimensional calculations one observes that, besides maintaining an accurate grid, remeshing produces subgrid dissipation that facilitates
underresolved calculations. For viscous calculations, it allows the vorticity to
spread its support. The remeshing frequency has then to satisfy vAtr < e1.
Moreover, if blobs of variable size are used (see Subsections 2.6.3 and 5.4.3)
regridding is crucial, even in the absence of distortion in the particle distribution,
to maintain the overlapping condition for both the Biot-Savart law and the diffusion. Finally, when vortex methods on different grids are combined through
236
7. Lagrangian Grid Distortions: Problems and Solutions
domain-decomposition techniques (see Section 8.3) regridding provides a very
simple way to transfer vorticity from one domain to another.
7.2.4. The ALE Remeshing Scheme
For completeness, let us describe an alternative technique for the rezoning of
the distorted grid associated with the particles. This technique may be devised
based on a technique initially applied to the Arbitrary Lagrangian-Eulerian
(ALE) method. In this interpolation the regridding procedure may be carried
out with an integral formulation for the remapping of the vorticity field, which
is
f/ =
/ / (o(x) dx,
where f / is the circulation assigned to the particle in cell A t of the new mesh
and co(x) is the vorticity of the old (distorted) mesh. The above integral may be
expressed in discrete form as
where A/7 denotes the overlapping area of the old cell / and the new cell j . This
remeshing procedure involves then the computation of those overlap areas.
An efficient algorithm for a piecewise constant vorticity field is presented by
Dukowicz and Kodis [76].
By Stokes formula, the surface integral is translated into a line integral,
ck
u
dl
along the contour Ck that defines the overlap region of the old and the new cell.
We may efficiently compute this integral by traversing first the cells of the old
grid and then the cells of the new grid and accordingly adding the contributions.
In comparison with the methods described in Section 7.2, the ALE technique
is more complicated, hard to vectorize, and introduces additional numerical
dissipation as it conserves only the circulation of the flow. However, it seems
advantageous when one is dealing with remeshing of a vortex field around
a complex configuration. There the interpolations described above encounter
problems near the boundaries as they have to be modified for each geometry.
The ALE method does not care about the specifics of the boundary as it deals
directly with the particle cells that may have any geometric configuration.
—
8
—
Hybrid Methods
In numerical simulations it is desirable to use numerical methods that are well
suited to the physics of the problem at hand. As the dominant physics of a flow
can vary in different parts of the domain, it is often advantageous to implement
hybrid numerical schemes.
In this chapter we discuss hybrid numerical methods that combine, to various extents, vortex methods with Eulerian grid-based schemes. In these hybrid
schemes, Lagrangian vortex methods and Eulerian schemes rn.ay be combined in
the same part of the domain, in which each method is used in order to discretize
different parts of the governing equations. Alternatively, vortex methods and
grid-based methods can be combined in the same flow solver, in which each
scheme resolves different parts of the domain. In this case we will discuss
domain-decomposition formulations. Finally we consider the case of using different formulations of the governing equations in different parts of the domain.
In that context we discuss the combination of the velocity-pressure formulation
(along with grid-based methods) and the velocity-vorticity formulation (along
with vortex methods) for the governing Navier-Stokes equations.
For simplicity, we often use in this chapter the terminology of finite-difference
methods but it must be clear that in most cases the ideas can readily be extended
to other Eulerian methods, such as finite-element or spectral methods.
One of the attractive features of vortex methods is the replacement of the
nonlinear advection terms with a set of ordinary differential equations for the
trajectories of the Lagrangian elements, resulting in robust schemes with minimal numerical dissipation. One class of hybrid vortex methods that tries to
retain this feature is the Vortex-In-Cell (VIC) scheme, which was introduced
in 1973 by Christiansen [55]. In VIC calculations, an Eulerian grid can be implemented in order to compute efficiently the velocity field on the Lagrangian
particles. Moreover this Eulerian grid can be used in order to compute diffusion
237
238
& Hybrid Methods
and baroclinic terms in the governing equations. In the first case, the goal is to
obtain a fast computation of the particle velocities in regular bounded domains,
whereas in the second case, the goal is to take advantage of the efficiency of
Eulerian schemes to deal with second-order elliptic or hyperbolic problems.
Another class of hybrid method, which we term Lagrangian-Eulerian
domain-decomposition methods, use high-order grid methods and vortex methods in different parts of the domain. For example, a finite-difference scheme
can be implemented near solid boundaries, and vortex methods can be implemented in the wake in order to provide the flow solver with accurate far-field
conditions. The fact that Eulerian methods can offer moreflexibilitythan vortex
methods to deal with viscous boundary conditions, in particular when they are
based on a suitable velocity-pressure formulation, can be an attractive feature
of Lagrangian-Eulerian domain-decomposition methods.
In the first section we describe various interpolation techniques that are
present in all hybrid methods, as they are used to transfer vorticity (or more
generally any Lagrangian quantity carried by the particles) between the particles and the fixed grid. In Section 8.2 we discuss VIC methods for inviscid
or viscous flows, and finally in Section 8.3, we describe several techniques for
particle-grid domain-decomposition algorithms.
8.1. Assignment and Interpolation Schemes
8.1.1. General Setting
In this chapter we denote by (x,-) the vertices of a fixed Eulerian mesh and by
(xp) the locations of particles with volumes vp carrying vorticity values up.
The particle approximation of a vorticity field u is then
u/(x) = ^^ vpWp8(x - xp).
p
The problem of transferring vorticity values from the particles to the grid can
be viewed as a particular case of the general interpolation procedures presented
in Chapter 7. However, there are two features in the assignment problem that
require some further discussion. First, while in Chapter 7 we were interested
in interpolating circulations, particle-grid methods have to deal with pointwise
vorticity values. Moreover, remeshing constraints were imposed only by particle considerations while in particle-grid methods one has also to incorporate
constraints imposed by the type of the grid-based solver. These in turn depend
on the equations and the domain that is discretized by the Eulerian grid.
8.1. Assignment and Interpolation Schemes
239
The definition of assignment schemes starts with the choice of a grid-based
family of functions (orfilters)0; satisfying
'- =
L
(8.1.1)
In practice, each function 0/ has a small compact support around the grid point
x;. If the grid is constructed through tensor products of one-dimensional meshes,
with uniform mesh size e, we can obtain the functions 0/ from a single function
0 by writing
£
The assignment scheme can then be summarized as
uji = — y ^ v p(jjp(pi(xp),
i
(o.i.z)
p
where Vt denotes the volume (that is, sd in the case of a Cartesian mesh in
d dimensions) around the grid point xt. The first essential requirement concerning the assignment scheme is its conservativity, which results from Eq. (8.1.1):
Conversely, interpolation of a grid quantity onto a distribution of particles located at points xp can be achieved through
Wp = '$2wi<l>i(Xp).
(8.1.3)
i
When the points x* are the nodes of a triangulation, a natural choice for the
functions 0/ is the basis of Lagrange finite elements related to this triangulation. These are functions that are piecewise continuous polynomials and satisfy
4>i(Xj) = Sij.
In the case of a Cartesian mesh, the basis functions 0 are usually constructed
by successive convolutions of the top-hat function (x) in the square of size s
centered at x,. These functions constitute the so-called B-splines, already seen
in Section 7.2 (see Figure 7.6).
The choice 0 = x * X yields a continuous piecewise bilinear function. In this
case each particle distributes its weight among the four nearest grid points, with
rates proportional to the respective distances from these points. This scheme,
240
8. Hybrid Methods
which was originally used in Ref. 55, is known as the area-weighting [or CloudIn-Cell (CIC)] scheme, as the rate of weight assigned from a particle to a grid
point can be found by measurement of the amount of overlapping between
the volume of the particle and the volume of each grid cell. The next term in
this hierarchy of functions is 0 = x * X * X> which yields a C1 piecewise
continuous quadratic function for each variable. The related assignment and
interpolations are generally referred to as the Triangular-Shaped Cloud (TSC)
(see for example Ref. 69).
It is important to point out that the assignment schemes related to Cartesian
meshes can be easily extended to other mesh configurations, for example polar
meshes. Besides, an important case is meshes in rectangular geometries with
refinement along one or more directions that can be mapped onto Cartesian
meshes. We denote by F the mapping between the physical space and the
Cartesian mesh and set
x^ = F(xp),
& =<pi o T 1 .
Then formulas (8.1.2) and (8.1.3) become, respectively,
ut = y ^2 vpu>p<pi(xp), Ljp
1
P
It should be noted that all the schemes described above lead to assignment
schemes that conserve, in addition to the circulation, the linear impulse of the
vorticity field. From Eq. (8.1.2) we get
Next we observe that, for all values of x,
^x,-</>,-(x) = x,
(8.1.4)
i
which gives
Note that, in case of a finite-element formulation, Eq. (8.1.4) is satisfied as
soon as the finite-element space contains polynomials of degree at least 1. A
numerical comparison of several filters, including the CIC and the TSC filters,
is done in Ref. 79.
8.1. Assignment and Interpolation Schemes
241
The conservation of higher moments requires higher-order accurate assignment schemes and the use of finite elements that would contain polynomials at
least of degree 2 (in this case the x,- would include, besides the vertices of the
triangles, points in the edge of the triangulation), or, in the case of a Cartesian
mesh, the use of assignment functions of high order as designed in Section 7.2.
8.1,2. Stability and Accuracy Considerations
Besides accuracy and conservativity, stability is an important requirement for
interpolation schemes. Numerical oscillations produced during the interpolation of quantities between grid and particles can accumulate and may result in
numerical instabilities. This has indeed been a major difficulty in the original
Particle-In-Cell algorithm introduced by Harlow in the context of gas dynamics.
The usual way to avoid oscillations is to ensure that the assignment scheme
is enstrophy decreasing. Brackbill and Ruppel [34] (see also Ref. 33) have suggested to combine assignment formula (8.1.2) with a calculation of local cell
volumes on the grid by using the same assignment kernel, namely,
Replacing the cell volumes by these values is clearly a consistent approximation as it amounts to a quadrature formula for the basis functions (pi. In the
case of finite elements or for grids that can be mapped to a Cartesian grid, we
can compute volumes by using either the finite-element basis or by mapping
first the particles to the Cartesian geometry and then by using the Cartesian
assignment basis, leading to volume formulas similar to Eq. (8.1.5). Vorticity
values on the grid points are then obtained by Eq. (8.1.2).
Observe that with this formula, modifying the volume evaluation does not
affect the circulations V/u;/ on the grid. However, volume calculation (8.1.5)
has the advantage of guaranteeing a grid enstrophy (^). V/u;?) that does not
exceed the particle enstrophy (^2p vpu?2p).
Proposition 8.1.1. Scheme (8.1.2)-(8.1.5) is conservative and L2 stable in the
sense that
(8.1.7)
242
& Hybrid Methods
Proof. For Eq. (8.1.6) we just observe that, from Eq. (8.1.2),
/
i
P
P
i
but ]TV 4>i = 1, so we get the desired identity. For the stability estimate we write
Since wpwq < 1/2(u2p + ^ ) , this gives
i
that is,
i
i
p
i
Using Eq. (8.1.1) again leads now to relation (8.1.7).
p
•
As a side effect, the volume formula also improves the accuracy of the assignment scheme. Replacing the volume of the cell sd by VJ compensates for
the computation of grid values when the particle distribution gets distorted.
This can be seen by considering the effect of this scheme on a constant vorticity field. With formula (8.1.5), the vorticity field will be recovered exactly,
irrespectively of how particles are strained. Another situation in which the improvement is readily seen is near boundaries. A simple-minded implementation
of formula (8.1.2) with uniform volume values would lead to 0(1) errors, because it misses particles that, in a smooth extension of the vorticity, would lie
on the opposite side of the boundary. By not accounting also for these particles,
formula (8.1.5) introduces a compensation effect in Eq. (8.1.2). Actually this
procedure amounts to an extension of the particle distributions by particles with
constant weights outside the computational domain, resulting in a first-order
assignment scheme.
In the case of a steep vorticity profile, the accuracy of the assignment
scheme can be improved by translating Beale's iterative method, described
in Section 7.1, into the particle-grid framework. In this context, this method is
designed to ensure that successive assignment-interpolations do not spread
the vorticity onto an increasing number of points. It is also efficient to assign
vorticity values at grid points near a boundary.
8.1. Assignment and Interpolation Schemes
243
To simplify the forthcoming discussion let us denote by 3 a particle distribution made of points £p with volumes vp, and by A (3) and 7(3) the assignment
and the interpolation operators, respectively. If V = (c*;^) is a vector containing the particle values of a function a;, the new particle quantities after an
assignment-interpolation sequence can be written as
V =1(E)A(E)(V).
(8.1.9)
Of course, since the assignment and the interpolation have been defined in a
consistent way, one has V ~ V, that is,
7(3)A(3)~7d.
(8.1.10)
Our goal now is to find new particle quantities V such that
V = 7(3)A(3)(V).
(8.1.11)
In view of relation (8.1.10) and rewriting
7(3)A(3) = Id + [7(3)A(3) - Id],
it is natural to compute V as the limit of the following iterations:
Vn+X =V + [Id-
7(3)A(3)]V n
= V + Vn - 7(3)A(3)V n .
(8.1.12)
If the number of particles and the number of grid points are of the order of N,
each iteration amounts to 0{N) operations. As already noted in Section 7.1,
problem (8.1.11) is the discrete analog of a deconvolution process and as such
it is ill posed. However, as a finite number of iterations (8.1.12) are performed,
this deconvolution affects only a finite range in the Fourier spectrum. In the
context of VIC methods, this algorithm is a way to restore information at a
subgrid level, depending on the number of iterations that are performed.
It is worthwhile to note in this example that the relevance of Eq. (8.1.12)
is based on assumption (8.1.10). Thus, in the presence of boundaries, it is
important to use the assignment scheme with volume calculation (8.1.5) and
not uniform volume values that would produce an 0(1) error at the boundary.
Finally, let us mention that in practice the gain obtained through Eqs. (8.1.5) and
(8.1.12) is limited to the case when particles are not regridded. When regridding
techniques described in Section 7.2 are used, Eq. (8.1.2) with Vj = sd turns out
to give a satisfactory accuracy.
244
8. Hybrid Methods
8.2. Vortex-In-Cell Methods
In this section we focus on the case in which grid and particle discretizations
coexist throughout the computational domain, but are used to solve different
parts of the governing equations. We first investigate the case of inviscid flows,
in which the grid is used to compute particle velocities, then we address viscous
flows, in which a grid solver is also used to resolve the diffusion terms of the
equations.
8.2.1. Inviscid Flows
For inviscid flows the grid is used only to compute efficiently the particle
velocityfieldthrough the computation of the streamfunction. In two dimensions,
for every time step the algorithm can be summarized as follows.
• Assign vorticity to the grid by using Eq. (8.1.2).
•
•
•
•
Solve A\P = —u) on the grid.
Differentiate the streamfunction on the grid to get velocities on the grid.
Interpolate velocity values from the grid to the particles.
Move the particles.
This scheme can handle efficiently wall boundary conditions, either Dirichlet
(for the no-through-flow condition) or periodic, when the geometry of the domain is regular enough so that fast Poisson solvers are available. In order to
restore the subgrid information carried by the particles, in the spirit of ParticleParticle, Particle Mesh algorithm, (see Hockney & Eastwood) Anderson [5]
corrects this scheme by considering the local interaction of particles. This provides a fast and accurate method for particle velocity calculations.
Note that a CIC assignment scheme does not need any correction at the
boundary to correctly assign vorticity from any particle in the computational
domain onto the grid. If a smoother assignment scheme is used (e.g., TSC), the
vorticity carried by particles in the first half of the cell would spread to a grid
point outside the domain. In this case, iterative procedure (8.1.12) can be used
to restore accurate values of the vorticity on the first grid points.
The same techniques can be used without modifications in three dimensions
with the vortex filament method [69]. For three-dimensional vortex particle
schemes, a straightforward extension of the method is to compute the stretching
by differentiation of the velocity on the grid and then interpolation on the
particles. A conservative variant of this method consists of writing the stretching
term in the conservative form div (<JJ : u). In this method, grid values of u and
UJ are multiplied and then differentiated on the grid and finally interpolated on
8.2. Vortex-In-Cell Methods
245
Figure 8.1. Successive stages (from left toright,top to bottom) of the reconnection of
two rings of opposite circulation by a VIC method.
the particles. Note that this scheme can be seen as the VIC equivalent of the
conservative grid-free scheme described in Chapter 3 [Eq. (3.1.9)]. Figure 8.1
shows a time sequence of vorticity isosurfaces obtained with this method for the
classical problem of the reconnection of two vortex rings of opposite circulation
in a periodic box. The bridge linking the two rings after the second reconnection
ultimately disappears, leaving two rings at an angle of ~90° from the original
ones. This simulation corresponds to a Reynolds number of 400. Diffusion is
solved by a PSE scheme, and remeshing with the M4 scheme [formula (7.2.11)]
is performed at every time step. The particle spacing would correspond to a 64 3
discretization of the computational box. At the end of the calculation (after 300
steps), the vorticity support is covered by ~30, 000 particles.
It is sometimes believed that particle-grid transfers induce some numerical
dissipation in VIC codes. To measure to which extent this is true, we give in
Figure 8.2 a comparison, for a classical isotropic homogeneous turbulence
experiment, between a VIC and a spectral method at the same 1283 resolution.
246
8. Hybrid Methods
le+OO
le-01 r
le-07
r
le-08
Figure 8.2. Homogeneous isotropic turbulence by a spectral method (solid lines) and a
VIC method (dashed lines), (a) spectra; (b) energy curves; (c) enstrophy curves.
The initial turbulent field has a peak at low wave numbers and random phases.
The Reynolds number, based on the Taylor microscale, is 75. Figure 8.2(a)
shows the spectra at times 0, 1,2, 6, and 10. Figure 8.2(b) and (c) show the
energy and enstrophy evolutions, respectively. All the other statistics, as well
as the coherent structures in the vorticity field, are in excellent agreement.
Given the fact that it is in general considered that, for this type of flow,
grid-based methods require at least twice as many points in each direction
to agree with spectral methods, the VIC method can be considered as rather
accurate. Note that the VIC calculation was remeshed at every time-step. These
simulations thus serve also as a check of the subgrid-scale effects of remeshing.
The numerical analysis of VIC methods can be done within the framework
already used for the numerical analysis of two- and three-dimensional, grid-free
vortex methods. If we represent the grid-particle scheme used to compute the
particle velocities in the operator form,
uh =
8.2. Vortex-In-Cell Methods
247
16.0
Figure 8.2. {Continued)
248
& Hybrid Methods
the task is reduced to proving Lp stability estimates of Calderon's type for
the operator Sh, similar to those valid for the Biot-Savart law in grid-free vortex
methods (Theorem A.3.1). Such estimates are in general available by formulation of the grid Poisson solver in a finite-element framework. We refer to Ref. 60
for details on an analysis for two-dimensional VIC methods based on this idea.
8.2.2. Viscous Schemes
In viscous flow simulations, VIC techniques can be used in conjunction with
the viscous splitting (see Section 5.1) of the Navier-Stokes equations.
We denote by unp and xnp the particle vorticities and locations at time tn =
nAt. The solution is advanced through the following substeps:
• Convection: Vorticity values are assigned to the grid, the velocity field is
computed by means of a Poisson solver, and the velocity field is interpolated
on the particles in order to advance their locations, as in the case of the
inviscid flows described above. At the end of this step, particles reach their
new locations xnp+l.
• Vorticity values and cell volumes are again assigned to the grid, yielding quantities that we denote respectively by u;" +1/2 and Vtn+l through the
formulas
• Diffusion: The diffusion equation is solved on the grid, and we obtain the
final grid values for the vorticity field. Particle values can be obtained through
another interpolation.
The diffusion step of this algorithm can be formulated in a general form by
use of a variational methodology. However, in order to be more specific, we
will assume a two-dimensional uniform grid and use a stable and conservative,
finite-difference scheme for the Laplacian (e.g., the five-point box scheme)
denoted by A e . Then the grid vorticity values at time tn+\ are obtained by the
solution of the diffusion equation:
= vSt A s (w? +1 ).
(8.2.2)
The above equation corresponds to an implicit diffusion solver. We can obtain
an explicit formula by replacing CJ" +1 with uJ\^ on the right-hand side. It
remains to update the particle vorticity values. Although it would seem natural
to interpolate CJ" +1 onto the particles, it is better computationally to interpolate
8.2. Vortex-In-Cell Methods
249
vorticity increments rather than the values themselves. The final result is then
given by
We can see the motivation for this formula best by considering the case v = 0:
in this case, Eqs. (8.2.2) and (8.2.3) do not modify the particle vorticity. On the
other hand, the formula u>np+l = ^ . u;"+10/ (*£+1/2) will most likely introduce
some numerical dissipation and thus modify the effective viscosity value in
the overall algorithm. A variant of this method, used for example in Ref. 42
(see also Ref. 157), is to restart at the end of each diffusion step fresh particles at the grid location, by using the vorticity values CJ" +1 . This technique,
however, is still not free of the numerical dissipation introduced by assignment
scheme (8.2.1). In addition, it requires using the same spacing for the grid and
for the particles, something that violates the overlapping condition necessary
to ensure the consistency of Eq. (8.2.1).
We now proceed to show that the algorithm defined by Eqs. (8.2.1)—(8.2.3)
is conservative and stable. To check the conservativity we observe that, since
the grid solver has been assumed conservative, by Eq. (8.2.2),
y v?+i<4+i = y vr i v +l/2 ,
i
i
and thus, by Eq. (8.2.3),
-;) = E K+1 -
We now turn to the stability of the algorithm (we follow here the proof given
in Ref. 170). We will see that this property heavily relies on the fact that cell
volumes are computed on the basis of the particle locations. Let us multiply
Eq. (8.2.2) by u?"+1 and sum over /. We get
^—>
/
/
i
We then observe that, by assumption on the finite-difference diffusion solver,
< 0. Writing 2u>"+1/2cc^+1 < |u?" +1/2 | 2 + |u?^+1|2 then yields
250
& Hybrid Methods
Let us now check that the grid-particle interpolation procedure (8.2.3) satisfies
(8.2.5)
We first rewrite Eq. (8.2.3) as
where <5u>;'+1 stands for u ^ 1 - u>"+l/2, whence
From Eq. (8.2.1) we deduce that
H\) =
+1/2
+{ 2
+{ 2
Writing 2^
^ + 1 / 2 == JlJl
' ' + < + 1 - 5u;f+1 yields
1/2
ij
P
(8.2.6)
But
ij
P
:+l
2
+1 2
8.3. Eulerian-Lagrangian Domain Decomposition
251
Combining this last inequality with Eq. (8.2.6) leads to relation (8.2.5). By the
stability of grid solver (8.2.4), this in turn implies that
which proves the stability of the overall algorithm.
Note that if an explicit grid solver is used instead of Eq. (8.2.3), to obtain
relation (8.2.4) one would have in general to fulfill a stability constraint of the
type vAt < Ce2.
VIC methods for inviscid or viscous flows may be viewed as an appealing alternative to pure grid-free vortex methods in simple geometries. In this
case, finite-difference methods for the diffusion equation allow more flexibility compared with that of the methods described in Chapter 6 in the treatment
of the no-slip boundary conditions. As we already pointed out, the use of a
fast Poisson solver also enables fast velocity evaluations. Compared with pure
finite-difference methods, VIC methods offer the advantage of a robust and
accurate treatment of the convective part of the equations with time steps not
constrained by convective CFL conditions. We refer to Ref. 133 for detailed
numerical results on VIC methods, including systematic comparisons with highorder finite-difference techniques.
8.3. Eulerian-Lagrangian Domain Decomposition
The motivation for such techniques stems from the observation that the strengths
and the weaknesses of grid-based and vortex schemes can be seen as complementary, depending on the physical problem. In certain cases it is advantageous
to implement grid-based methods to resolve regions of the flow in which viscous effects are important while using a Lagrangian vortex method for the
convection-dominated part of the domain.
For example, for flows around one or several obstacles, one possibility is
to rely on existing grid-based codes to resolve the flow around each obstacle
while using a vortex method in between the obstacles. Compared with a purely
Eulerian method, this approach removes most of the geometrical constraints
that would arise from the need to adjust a single mesh to several bodies (if these
bodies are in relative motion, this geometrical constraint becomes even more
severe, as a new geometry has to be meshed at every time step). Moreover, vortex
methods provide an accurate way to implement far-field boundary conditions
for the Eulerian scheme that otherwise would have to be modeled.
Compared with a pure vortex method, the hybrid scheme adds flexibility to
the treatment of the no-slip boundary conditions, in particular if a velocitypressure formulation is chosen near the boundaries. As we will see, it also
252
8. Hybrid Methods
removes the source of inaccuracy in the treatment of kinematic boundary conditions, pointed out in Chapter 4, that result from a vortex blob's overlapping
with the solid boundaries. Finally, pushing the particle resolution away from
the boundaries simplifies the particle remeshing strategies.
Several options can be considered for the Eulerian solver, depending on the
chosen formulation - velocity-pressure or velocity-vorticity - and on the time
advancing scheme - explicit or implicit. As for the vortex method, one could
consider solving either the full Navier-Stokes equations or their inviscid approximations. This last option has been investigated in Ref. 61 and seems legitimate
for high Reynolds numbers, as viscous effects are mostly linked to vorticity
generation at the solid boundaries. However, combining viscous and inviscid
models through domain decomposition requires some care in the definition of
the interface condition. This additional cost does not seem justified by the negligible computational savings that inviscid vortex methods offer compared with
that of the viscous schemes.
When designing domain-decomposition techniques, it is customary to distinguish between overlapping and matching domain decomposition. For our
purpose, we consider only the first case. As we will see, because of the different nature of the solvers in each subdomain, it will greatly simplify the definition
of consistent interface boundary conditions to allow the transfer of information
between the subdomains, for a slight computational overhead compared with
a matching technique. For a hybrid technique based on matching subdomains,
we refer to Ref. 97.
Figure 8.3 sketches a typical domain decomposition with overlapping. For
the sake of simplicity we focus on the domain decomposition around a single
Figure 8.3. Eulerian-Lagrangian domain decomposition with overlapping.
8.3. Eulerian-Lagrangian Domain Decomposition
253
body in a fluid domain V. The Eulerian and Lagrangian domains are denoted by
Vi and V2, respectively, and S\ and £2 are the outer boundary of V\ and the
inner boundary of V2, respectively. Wefirstconsider the case in which velocityvorticity formulations are used in both domains and then turn to the case in which
a velocity-pressure formulation is used in the Eulerian domain.
8.3.1. Velocity-Vorticity Domain Decomposition
In this case, both the Eulerian and the Lagrangian schemes need to handle two
equations of a very different nature: an elliptic equation for the calculation of
the velocity from the vorticity, and a convection-diffusion parabolic equation
to update the vorticity at each time step. Following Ref. 61, we will clearly
distinguish between the domain-decomposition techniques that are required
for the solution to these two equations.
Computation of the Velocity from the Vorticity
In this section, we assume that the vorticity field is known both on the grid in
V\ and on the particles in V2. The computation of the velocity then amounts to
solving the elliptic system
A#=-u>
(8.3.1)
for the streamfunction \P. A popular domain decomposition procedure for this
problem is the Schwarz alternating method. It consists in solving alternatively
Eq. (8.3.1) in V\ and V2, each domain using as boundary condition the streamfunction value obtained in the other domain at the preceding iteration. In the
present case we are faced with the particular additional feature that the elliptic
solvers are of a different nature in each domain: a grid solver in V\, an integral
solver in V2, associated with the use of the Biot-Savart law. As seen in Chapter 4,
an integral representation of the solution of Eq. (8.3.1) in V2 is given by
f
f dG
= / G(x-y)o;(y)dy+ /
—(xJV2
JS2 °nx
+ / G ( x - y ) — (y)dy.
Js2
9n
(8.3.2)
In principle this would require to determine the single layer potential d\P/dn
at the boundary by solving an integral equation. In the context of a domain
decomposition the algorithm can be further simplified by using the values of
this potential, along with the values of #, obtained from the finite-difference
solution in V\. This procedure was used in [61] and proved to converge in [3].
254
8. Hybrid Methods
The integrals in the right-hand side of Eq. (8.3.2) are then discretized on the
particles lying in V2 and on fixed source points located on S2.
One iteration of the Schwarz alternative method can be summarized as follows:
• Given & on Si, solve Eq. (8.3.1) in V {.
• Deduce values for iP'and d\P/dn on source terms on S2.
• Use these values to evaluate the right-hand side of Eq. (8.3.2) and compute
4^on Si.
After convergence of these iterations, the final velocity is obtained through the
grid values in V\ and by formula (8.3.2) in V2 — V\. Particle velocities in V2 n V\
are obtained by interpolation of the grid values.
Some comments are in order concerning the expression of the vorticityfieldto
be used in Eq. (8.3.2). As we have seen in Chapter 4, the vortex method solution
in V2 can be either represented by particles or blobs. The blob representation
can lead to inconsistency because of possible overlapping with the boundary S2.
In the present case, this inconsistency is irrelevant, provided the two interfaces
are separated by at least a distance of the order of e, because the difference
between the velocity fields created by a point particle and a blob of size s located
in the neighborhood of S2 vanishes away from S2. This feature illustrates the
flexibility that the domain-decomposition approach offers to the vortex method
in the treatment of boundary conditions. Thisflexibilitywill be further apparent
below in the treatment of the vorticity boundary condition and in regridding
techniques.
Solution to the Vorticity Convection-Diffusion Equation
We now assume that the velocity is known everywhere at a given time step t n,
and our goal is to update the vorticity in both domains. The method relies on two
main ingredients: the PSE scheme described in Section 5.4 and the regridding
techniques discussed in Section 7.2.
Let us denote by <J[ the grid solution in V\ and by u^ = Y1P vp^np^(x ~ X P
the particle solution in V2 at time tn. We first assume that an explicit scheme is
used in V\. To update oj\ on the interior nodes in V\ requires the knowledge of
the vorticity at time tn on the grid points lying on Si. Likewise, to update the
particle solution in UJ2 on the basis of the particle equations
one has to know the circulation and locations at time tn for those particles that
8.3. Eulerian-Lagrangian Domain Decomposition
255
may affect the vorticity in W2. If p is the size of the support of the kernel r\
used in PSE formula (5.4.6), one may easily estimate that these particles lie in
a layer around S2 of width U At + ps, where U is an estimate of the maximum
absolute value of the velocity. We subsequently call Vn this layer.
To obtain the missing information on these grid points on Si and particles
in V\2, we have to resort to the particle-grid operators described in Section 8.1
in the following way: We obtain values of u/[ on Si by assigning to these grid
points the circulation of nearby particles in V2 (this of course requires that the
distance between Si and S2 be larger than the width of the assignment function).
Conversely, vorticity values on particles in V\2 are computed by interpolating
grid values ufx. It is worthwhile to emphasize that, by allowing these particles
to play the role of the interface boundary condition for the vortex method,
one simplifies the treatment of vorticity boundary conditions for the vortex
method. The overlapping assumption allows us to take advantage of a natural
extension of the vortex solution outside its computational domain, something
that of course would not be possible if vortex methods were used all the way
to the boundary. It allows us, for example, to bypass the integral formulation
described in Subsection 6.3.3.
The method can be summarized as follows. For each time-step
• compute the velocity on the grid as well as on particles by using the method
described in the previous paragraph,
• project particles onto the grid to get vorticity grid values on Si and interpolate
from the grid to get particle circulations in V\2,
• update particles in V2 with a PSE scheme, and grid values in V\.
If we consider the case in which the Eulerian method is based on an implicit
treatment of the diffusion, the only difference with the explicit case is that
the vorticity boundary condition on Si will be obtained by projection from the
vortex solution obtained at the end, rather than at the beginning, of the time-step.
In this case, the algorithm proceeds as follows:
• Compute velocity in the whole domain with the method of Subsection 8.3.1.
•
•
•
•
Interpolate vorticity values at the particles in V\ 2.
Move particles and solve for the diffusion in V 2.
Project new particle vorticity to get vorticity boundary condition on Si.
Solve the implicit Eulerian scheme with this boundary condition.
Note that of course both the explicit and the implicit method require a vorticity boundary condition on the obstacle reflecting the no-slip condition. For a
256
& Hybrid Methods
discussion of this topic in the context of finite-difference schemes we refer to
Refs. 78, 110.
Reg ridding for Accurate Vorticity Transfer
A clear consistency requirement for the procedure just outlined is that particle
locations yield accurate quadrature formulas in V2 U V\2, so that grid information can be accurately translated onto particles and vice versa. In the original
method, as described in Ref. 61, particles were continuously injected upstream
of the obstacle, and the consistency of the interface conditions relied on the
assumption that the flow would by itself carry particles in the vortical regions
of the flow.
A more robust way to ensure a consistent particle discretization in the interface zone is by periodically remeshing the particle distribution. By using one of
the interpolation formulas indicated in Section 7.2, one obtains a new consistent
particle solution in V2. That is due to the fact that V2 does not contain blobs that
would intersect S. After N time steps, particles have moved but still allow an
accurate description of the vorticity in V2 and transfer of vorticity through the
procedure above outlined, provided that
\U\NAt <d(S,Si)-pe.
(8.3.3)
Inequality (8.3.3) allows us to estimate the frequency of remeshing needed. It
is actually very likely that preserving a regular particle grid for the NavierStokes solver in V2 would impose a more drastic restriction on the remeshing
frequency.
The above argument leads to the same conclusion as for the wall boundary
conditions: Using an Eulerian solver near the body allows us to bypass the
technical difficulties that remeshing would meet in this region.
Figure 8.4 demonstrates that the domain-decomposition method ensures a
smooth transfer of vorticity between the Eulerian and the Lagrangian subdomains. In the Eulerian domain a fourth-order compact finite-difference method
was used [78] on a polar grid of 51 x 161 points. Grid-particle interpolation
and particle regridding are done with the M\ formula. The vortex domain starts
at r = 1.32, and the finite-difference domain ends at r — 2. In the present simulation, the vorticity remains mostly attached to the obstacle, and the vortex
solution merely provides an accurate far-field solution for the finite-difference
solver.
To conclude this section let us emphasize that the techniques just described
apply with little modifications to particle-particle domain decomposition. In
this case one wishes to use particle discretizations of both the boundary layer and
the wake, but with a different resolution. Typically particles would be remeshed,
257
8.3. Eulerian-Lagrangian Domain Decomposition
1.5
-0.5
-1
-1.5
-1.5
-1
0.5
-0.5
1
1.5
2.5
3.5
1.5
2.5
3.5
(a)
1.5
0.5
-0.5
-1.5
-1.5
-1
t - _
-0.5
•
_- r
0.5
1
(b)
Figure 8.4. Time evolution (isovorticity lines) for theflowbehind an impulsively started
cylinder by the domain-decomposition method of Subsection 8.3.1. The Reynolds number is 550. The dashed circles indicate the outer limit of the finite-difference domain.
258
8. Hybrid Methods
-0.5 -
_1.5
_1
_o,5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
1.5
0.5
-0.5
-1.5
-1.5
0.5
1
1.5
td!
Figure 8.4. (Continued)
2,5
3.5
8.3. Eulerian-Lagrangian Domain Decomposition
259
by means of local mappings, on a polar grid with refinement in the normal
direction around the obstacles, on a uniform Cartesian grid in between the
obstacles and on another polar grid in their wakes. Each subdomain is resolved
by means of a vortex method with variable blobs, as discussed in Section 2.2
and Subsection 5.4.3 (see Figure 5.8). We achieve the transfer of boundary
conditions from one subdomain to another simply by remeshing the particles
in the overlapping zone on grids by using local mappings corresponding to the
desired resolutions. A more detailed discussion on this topic can be found in
Ref. 133.
8.3.2. Velocity-Pressure and Velocity-Vorticity Domain Decomposition
Although it involves different formulations of the fluid equations, this case is
not more difficult to deal with than the previous one. In particular, the pressure term in the Eulerian domain does not require specific interface boundary
conditions.
Here again we have to distinguish between explicit and implicit solvers in
the Eulerian zone. The choice between these two options is in general dictated
by the type of discretization chosen there (for example afinite-elementmethod
will be based on an implicit treatment of the diffusion, whereas finite-volume
methods favor fully explicit solvers).
Let us first discuss the case of an implicit Eulerian solver. In this case, to
advance the solution from time tn to time tn+\ in V\, one has to solve a system
of the form
(Id + vA^A)u n+1 + Vpn+X = F\
V • u n + 1 = 0,
(8.3.4)
where Fn depends on un and the nonlinear term evaluated at time tn. One thus
needs a boundary condition for u rt+1 at the interface S\. On the other hand, the
(explicit) vortex scheme allows us to update the vorticity field in S2 to time
tn+\ by using velocity values and vorticity values on particles around S2 at
time tn (we assume for the time being that forward Euler time stepping is used
to push particles and calculate circulations). It is thus natural to recover the
value of un+l at S\ through a Schwarz algorithm similar to the one outlined in
Subsection 8.3.1. The difference is that the Eulerian solver has to work on the
full Navier-Stokes equations (8.3.4) instead of dealing with only the elliptic
system (8.3.1).
For each time step, the coupling scheme can be summarized as follows:
• Differentiate velocity grid values to obtain vorticity in V\.
• Interpolate vorticity grid values onto particles in V\2-
260
& Hybrid Methods
• Update particle location and circulations in V2 with a PSE scheme.
• Iterate the velocity values on S\ with the Schwarz algorithm, iterating between
the Biot-Savart law and Eqs. (8.3.4).
In case a multilevel time-advancing method is chosen in one of or both subdomains, the above procedure has to be adapted to provide also velocity boundary
conditions at the interface at intermediate time levels.
Of course the precise way Eqs. (8.3.4) are implemented depends on the
kind of Eulerian method used in V\. For a finite-element method, pressure and
velocities have to be discretized in compatible finite-element spaces, and no
boundary conditions need to be prescribed on the pressure. Finite-difference
methods in general use projection algorithms. In summary, Eqs. (8.3.4) are
first solved without the solenoidal constraint; then the velocity is projected
onto divergence-free fields by the addition of the pressure term; the pressure
is determined through the solution of a Poisson equation with a Neumann
boundary condition to ensure the correct through flow.
If now an explicit scheme is used in the Eulerian domain, a finite-difference
scheme can advance the velocity values at the first substep of a projection
algorithm on all interior points in V\ by use of only velocity values at time
tn. However, the value of u n+1 on Si is required for providing the boundary
condition for the calculation of the pressure in the projection step. This boundary
condition is computed through a Schwarz iterative algorithm. More precisely,
if we set
un = un + At[vAun + (un • V)u n ],
the Schwarz algorithm consists of calculating a velocity a on Si through the
following iterations:
• Solve Ap = V • u" with dp/dn = a • n on Si.
• Set u = u n 4- Vp and input this value on S2 to compute the velocity in V2
through the Biot-Savart law.
• Compute new value of the velocity a on Si.
Compared with that of the implicit scheme, the advantage of the present method
is that each iteration of the Schwarz algorithm involves the inversion of only
one Laplacian, instead of three in two dimensions or four in three dimensions.
We refer to Refs. 132 and 133 for numerical illustrations of these methods.
Appendix A
Mathematical Tools for the Numerical
Analysis of Vortex Methods
The goal of this appendix is to provide the mathematical background needed in
the numerical analysis of vortex methods and, more generally, particle methods.
The two first sections are devoted to particle approximations of the solutions to advection equations. The third section summarizes some mathematical
features of the Navier-Stokes equations. The numerical analysis carried out in
Chapters 2 and 3 results from a combination of the results hereafter derived.
As we have seen in several occasions, the basic feature of vortex methods is
that the data, that is the initial vorticity and the source terms at the boundary,
are discretized on Lagrangian elements where the circulation is concentrated.
These elements are termed particles, and mathematically they consist in delta
functions. In Section A.I we answer the following question: in which sense
can a set of particles be used to approximate a given smooth function? We
then proceed in Section A.2 to demonstrate that particles moving along a given
flow are explicit exact weak solutions, in a sense that we precisely define, of the
corresponding advection equation. This is the mathematical reason why particle
methods are suitable for the numerical approximation of transport equations.
We then show stability properties for the weak form of the transport equation.
Together with the results of Section A. 1, these stability estimates are the central
tool for the numerical analysis of particle methods for linear equations.
For the numerical analysis of vortex methods, it then remains to handle the
non-linear features of the flow equations. This is the purpose of Section A.3,
where in particular we give the Calderon theorem which allows to control in
an optimal way the nonlinear coupling resulting from the calculation of the
velocity in terms of the vorticity.
In all this appendix, our computational domain, which we will denote
by Q, will be either the whole space Rd, or a square box with periodic
boundary conditions, or a bounded domain. In this later case we will assume
261
262
Appendix A. Mathematical Tools
no-through-flow-type boundary conditions, that is the velocity field (a) satisfies
a • n = 0 at the boundary, where n denotes the outward normal to the boundary.
In the periodic case all coefficients will of course be supposed periodic.
The functional framework will be based on the Sobolev spaces Wm'p(Q)
of functions which are, together with their derivatives of order up to m, in
LP(Q). If one wishes to deal with periodic geometries, then the functions will
in addition be assumed to be periodic. If Q is bounded and no-through-flowtype boundary conditions are prescribed, we will assume the functions to vanish
at the boundary, together with their derivatives (that is we will work with the
spaces W™' P(Q)).
In all three cases (R J , periodic box, or bounded domains and functions vanishing at the boundary), to simplify the notations, when there is no ambiguity we
will denote by Wm>p the resulting Sobolev spaces. We will denote by || • \\ mfP
the natural norms and by | • | m/7 the associated semi-norms of these spaces.
We will finally denote by W~m'p the distribution space made by all continuous linear form on Wm'p*, where p* denotes the conjugate exponent to p
(l/p + l/p* = 1), and by || • \\- m,p its norm. We refer to [2] for the mathematical properties of these spaces.
Finally if X is a functional Banach space and T is a positive time, we will
use the spaces Lp(0, T\ X) of functions of x and t, which are for all time in X
and are in Lp as vector valued functions of time.
A.I. Data Particle Approximation
If one looks for a functional framework in which one could quantify the degree
of approximation of a function by a Dirac mass (or particle), it is clear that the
space M of bounded measures is not appropriate: consider 2 particles xi and
X2 arbitrarily close to each other, but distinct; then the difference has norm 2 in
M (take the duality of 8(x — \\) — 8(x — X2) against a continuous test function
0 having the value 1 at xi and —1 at X2), and thus does not tend to 0 when
xi — x2 tends to 0. Therefore a bigger functional space has to be found, or, by
duality, a space which acts on test functions in a space which is smaller than
the space of continuous function. Good candidates for the test function spaces
are the Sobolev spaces Wm'p(Q), which by Sobolev inclusions are made of
continuous functions if m > d.
A. 1.1. Deterministic Initializations
Let us assume that u is a smooth function and that particles are laid on a regular
lattice: for h > 0 given, xp = p/z, p e Zd, if Q = Rd. If Q is a d-cube
A.I. Data Particle Approximation
263
we divide it in cells of size h and take for the particles the center of each
cell.
Then the particle discretization of u defined by
p
is an approximation of u in the sense of
Theorem A .1.1. Letm>d. Assume u e Wm'°°(Q)D Wm'l(Q). Then the following error estimate holds, for all p e]l, +00[
\\u-uh\\-m,p<Chm.
(A. 1.2)
Proof. Let 0 a test function in Wm'p*. If we denote by Bp the cell centered at
xp with side of length h, we have
(K - K*, 0) = ] T I /
I|(X)0(X) dx - \Bp\u(Xp)(j)(xp) I .
Our estimate thus amounts to a quadrature estimate related to the midpoint
quadrature rule for the function u(j). Observe that, depending on the situation
under consideration, this function is either a periodic function or a function vanishing at the boundary (in particular, for the no-flow case, under our assumptions
on w, ucj) is indeed in W™' l(Q)).
This quadrature rule is actually of infinite order:
Lemma A.1.2. If'g e WmA for some m > d then
y g(x)dx-\Bp\g(xp)\
<Chm\g\mA.
This assertion can be proved by using either Bramble-Hilbert lemma or Poisson's summation formula [8]. However the second proof is not optimal in the
sense that it requires more regularity than really necessary and we only sketch
the proof based on Bramble-Hilbert lemma. One first checks that there exist
coefficients ca such that for all g which are polynomials of order less than m
g(x) dx - g(0) =
V
ca I dag(x) dx,
264
Appendix A. Mathematical Tools
where B denotes the unit d-dimensional square. By Bramble-Hilbert lemma
and the Sobolev embedding W m l C C°, for m >d, this implies that
g(x) dx It remains now to map B into Bp and to add up all the resulting contributions
(this is the technique also used to control projection errors in finite-element
methods). A classical scaling argument, produces a factor of the order of/z|a| in
front of the contribution of the derivatives of order a. To conclude, it remains
to notice that the contribution of the sum of the integrals of derivatives on Q
vanishes (recall that if Q is bounded, we deal either with periodic functions or
functions vanishing at the boundary, so that this property is true), leaving us
only with the highest order derivatives in the estimate, with a factor O(hm).
With the estimate (A. 1.3) it is now easy to prove (A. 1.2), since one can write
|W0L,1 < \W\\m,p\\<t>\\m,p*
and u e Wm'P(Q) for all values of p.
u
Remark.
1. The above result clearly applies to geometries which can be smoothly mapped
onto rectangles (for instance circular domains through the use of polar coordinates). In this case, the uniform quadrature weights in the mapped space,
once multiplied by the Jacobean of the mapping give the actual values of the
volumes around the particles in the physical space.
2. If one wishes to allow test functions that do not vanish at the boundary, the
accuracy of the midpoint quadrature formula breaks down to second order; if
one seeks higher order particle approximations it is necessary to use Gausstype quadrature points. We do not pursue on this matter which is classical
in numerical integration.
A. 1.2. Random Initializations
We now analyze two quadrature formulas of Monte Carlo type, that is, formulas
which are based on the use of random number sequences.
The first method we wish to deal with is the genuine Monte Carlo method,
where particles are initialized using independent random variables in the support
of the function to approximate. More precisely if £2 is the unit square [0, 1]^,
let us consider the space 3 of all sequences £ = (£1? £2> • • •) with values
A.I. Data Particle Approximation
265
in £2. A sequence of particle initializations consists in the choice of a particular
sequence within this space, and one specific initialization is given by the TV first
elements in this sequence, for a finite value of N. In practice it requires the call
of a random generator number. Note that this formula is also the basic ingredient
underlying random walk methods for the simulation of viscous flows.
One can prove that this formula is consistent, for almost all sequences £, in
the following sense
Lemma A.1.3. Let g e L2(Q). Then
[ \g(x)\2dx
(A. 1.4)
Proof. By setting g = g — J Qgdx, we are brought back to the case when
JQgdx = 0. In this case, if we develop the left-hand side of (A. 1.4), we find
If / =£ j , Fubini's theorem implies that the corresponding term in the above
sum will be the square of the integral of g, that is zero. We are thus left with
which yields the expected estimate.
•
The interest of this quadrature estimate is clearly that it requires only weak
regularity of g. However its convergence is rather slow and we now present
a method which can be seen as a compromise between mid-point formulas,
which are potentially high-order accurate but require smoothness, and the fully
random technique just analyzed.
This quadrature formula consists in splitting the computational box in cells
of uniform size h\ then, instead of taking the center of the cell, one chooses
randomly a point inside these boxes. If we denote by X;, / e [1, N]9 the leftbottom corner of the cell number /, the particle will have location x t +£,•/*,
where £t is chosen randomly in [0, 1]^. One can prove
Lemma A.1.4. Assume g e Wl'°°(Q). Then
Li
N
7-1 V ^
266
Appendix A. Mathematical Tools
Proof. It goes along the same lines as for the formula (A. 1.4). If we assume
that g has mean value 0, on expanding the left-hand side of (A. 1.5), one
gets
+
Xi + ti
V
g(x)dx
hdN2
\g(x)\2dx
where Bt denotes the cell number /. Next we observe that
2
g(x)dx = 0
or, equivalently,
v- r
g(x)dx / g(x)dx
g(x)dx = 0.
Thus
l
\g(x)\2dx-h~d
dx
g(x)dx
B<
We next note that, by a straightforward expansion of g:
\g(x)\2dx-h
-d
1
g(x)dx
2
= hd0{h\g\l0
and (A. 1.5) follows.
For d = 2 we get a second-order accuracy if the function g is differentiable.
This must be compared with the mid-point formula which yields the same
accuracy but for a function which is twice differentiable. However in the case
of the Monte Carlo method, the order of accuracy is to be taken in a statistical
sense. Also observe that the amelioration of this formula over the genuine Monte
Carlo obviously deteriorates as the dimension increase.
A.2. Classical and Measure Solutions
267
The quadrature formulas that we have seen use uniform distributions of
points. The particle weights that result are given by the local value of the function to approximate. Alternatively, one may also consider quadrature formulas
where the weights are constant, but the distribution of points adjust to the function to approximate. This type of quadrature formulas can be useful in some
particular situations (they are actually a well-known tool in applications of
particle methods to plasma physics) but are clearly of more delicate use.
A.2. Classical and Measure Solutions to Linear Advection Equations
In this section we summarize the mathematical background needed for the
definition and the numerical analysis of particle methods. The outline of this
section is as follows; wefirstrecall some basic facts related to classical solutions
of linear advection equations, including a precise regularity result. Then we use
the notion of measure solution to give a mathematical meaning to particle
approximations as it was first described in [169]. Finally we exploit further
this notion of weak solutions to derive error estimates in distribution spaces for
particle approximations. Our analysis will be based on techniques described in
[60] then further simplified in [44, 45]. We will be working in J-dimension (in
practice d = 2 or 3), a = (a\,..., ad) will denote a vector field and a0 a scalar
function. We will denote by L the operator defined by
Lu =
du
ot
h div(aw) + a§u
and by L* its formal adjoint:
L u=
du
dt
(a • V)u + aou.
A.2.1. Classical Solutions: Explicit Expression
and Regularity Properties
Let us first recall how smooth solutions of the advection equation can be explicitly written, using the notion of characteristics.
If / and wo are given functions in Q we will call u a classical solution of the
advection equation
Vu
= /;
K ( . , 0 ) = W0
(A.2.1)
a distribution solution of this equation which is continuous with respect to x e Q
and t. We will denote by X(f; x, s) the characteristics associated to the vector
268
Appendix A. Mathematical Tools
field a, passing through x at time s, that is the solution to the system:
— =a(X,O; X(s;x,s)=x.
(A.2.2)
dt
It is well known that this system has a unique solution as soon as a is Lipschitz
continuous with respect to x.
The existence and uniqueness of classical solutions are given by
Theorem A.2.1. Assume u0 eC°, f e Ll(0, T\ C°). Assume further thata e
L°°(0,T\ Wl'°°(Q))with a-n = 0 at the boundary if we deal with bounded domains with no-through-flow boundary conditions, and ao e L ] (0, T\ C°(Q)).
Then the problem (A.2.1) has a unique classical solution given by
M(X, t) = w o (X(O;x, O ) e x p
( /f
['
— f(X(s;x,t),s)exp[
J0
ao(X(s;
x, t),s) ds
( fl
/
\Js
;x, t),o)da
\
) ds.
(A.2.3)
If ao = f = 0 the above result means that the solution merely propagates along
the characteristics. Actually writing u in the corresponding Lagrangian coordinates reduces our PDE to a first-order linear ODE for the function of time
t —> u(X(t; x, s), t). Upon inverting the flow map, the explicit integration of
this ODE gives the formula (A.2.3).
Observe that, in the case of no through-flow boundary conditions, if UQ and
/ vanish at the boundary, the same property is true for u(-,t) at later times.
This clearly results from (A.2.3), once it is observed that, due to the no throughflow condition, characteristics which intersect the boundary, must remain for
all times on the boundary. Let us now deal with the so-called conservative form
Lu = f;
II(.,O) = MO
(A.2.4)
of the advection equation. Although it is obviously equivalent to the form
(A.2.1), up to some changes of signs and to the addition of the term div a
to ao in the operator L*, it is worthwhile to rewrite the solution of (A.2.4) in a
slightly different way, emphasizing its conservative features. Let us denote by
J(t;x, s) the Jacobian of the transform x - • X(t; x, s)
J(t;x,s)
Then we have
= det—
ax
A.2. Classical and Measure Solutions
269
Proposition A.2.2. Under the same assumptions asfor Theorem A.2.1, ifao = 0
the classical solution of (A. 2.4) can be written
w(x, 0 = wo(X(O; x, t))J(O; x, t) + / f(X(s; x, t), s)J(s; x, 0 ds.
Jo
//M 0 e Ll(Q) and f e Ll(0, T\ Ll(Q)) then u e L°°(0, T\ lL(Q)) and
/ u(x,t)dx=
Jn
/ uo(x)dx+
/
JQ
/
JO JQ
f(x,s)dxds.
This result follows easily from theorem A.2.1 and the well known fact that the
Jacobean is solution to the ODE
j = Jdiv a.
The second equality above can be seen as the integral counterpart of the pointwise conservation expressed in Theorem A.2.1. In the important particular case
of a divergence free velocity field a, the Jacobian remains equal to 1 for all
time, and both conservations, pointwise and in the mean, hold.
We now state a regularity result for equation (A.2.1). This result will be
crucial in the stability estimates for weak solutions needed in the numerical
analysis of the vortex methods.
Theorem A.2.3. Letm > 1, p > 1, T > 0 and assume a0, a e L°°(0, T\Wm'p).
Assume further that there exist 2 constants A and M such that the following
estimates are valid for t e [0, T]
A^la^Okoo < M
, Olkoo + 2 ^
A
l^o(-, Okoo < M
(A.2.5)
(A.2.6)
k=\
Then, ifu0 e Wm'p and f e L{(0, T\ Wm>p), the classical solution u to (A.2.1)
belongs to L°°(0, T;Wm'p). Moreover there exist constants Ck only depending
on M and T such that, for k < m
l«(-, t)\k,p < C { J 2 Ak~' (l«ol/. P + J I/O, t)\ll pdt
+ Ak-1 (\\uo\\o,P + J ll/0,Ol
(A.2.7)
270
Appendix A. Mathematical Tools
Proof. For a given m, we proceed by induction on k < m. For k = 0, we write
the solution on the form (A.2.3) and we estimate the Lp norm of the right-hand
side using the change of variables along the characteristics y = X(0; x, t) for the
contribution of u0 and y = X(s; x, t) for the contribution of / . We observe that,
due to (A.2.5), |tf|i,oo < M, and thus the jacobians of these change of variables
are bounded by exp MT and the Lp estimate (A.2.7) for k = 0 follows.
We next differentiate k times the original equation with respect to all possible
combination of variables. This gives a system of equations which can be written
in the following general form
- (a - V)Dku = Dkf + B(Da, Dku)
ot
k
k
/=2
i= \
where Dl v denotes the vector made up of all derivatives of order / of v and
B, Ph Qt denote various bilinear forms. If we denote by F the above right-hand
side, formula (A.2.3) yields
Dku(x,t) = Dku0(X(0',x,t)) - /
F(X(s-,x,t),s)ds.
Jo
Arguing as for k = 0 we get
\\Dku(-, t)\\0,P
< C(M, T) [ll^Mollcp + / ' \\F{.; *)llo,P ds\ .
It remains now to develop F to obtain the following bound
0 , t)\k,p
< C(M, T) I \uo\k,P + /
I I / O , s)\k,p + laokoolwO, 5)10,/
k-l
\u(',s)\itP(\a\k+i-it0O-\
We now use (A.2.5)-(A.2.6) to estimate the derivatives of a and ao, and we
assume that (A.2.7) is true for all derivatives of u up to order k — 1. We obtain
/ I/O,
/-*
A.2. Classical and Measure Solutions
/
l/O.OIy.pdO + A^dlllollo.p + /
271
ll/0,Ollo,pdol|
< C{M,T)1
Jo
k-l
•,s)\\ OtPds + y 2
f
f(;t)\j,f
Jo
which ends our proof.
A.2.2. Measure Solutions and Justification of Particle Approximations
To give a mathematical meaning to particle approximations, we now need to
define measure solutions to the advection equation in its conservative form
(A.2.4). We will have to deal with continuous functions either vanishing at
infinity, or at the boundary of the computational domain Q, or periodic in Q,
depending on the case we wish to focus on. To avoid unnecessary notational
complications, we will denote by C° the corresponding space. M will be the
space of Radon measures on Q, and (•, •) the duality pairing between M and C°.
Definition A.2.4. For u0 e M and f e L{(0, T; M), u e L°°(0, T\ M) will
be called a measure solution to (A.2.4) if it satisfies
I (u('9t),L*4>(.,t))dt
Jo
= (uo,<K',O))+
[ (/(•, t),<K.,t))dt
(A.2.8)
Jo
for all test function 0 such that <p(-, T) = 0 and
0 G C°([0, T]; C°); L*0 e lL(0, T; C°).
(A.2.9)
In view of (A.2.8), it is clear that the space of test functions should at least fulfill
the regularity requirements given in (A.2.9). The existence and uniqueness
theorem which follows confirms that these conditions actually define the right
test function space.
Theorem A.2.5. Assume a and a$ satisfy the same regularity assumptions as
in Theorem A.2.1. Then for all u0 e M and f e Ll(0, T;M), problem
272
Appendix A. Mathematical Tools
(A.2.8)-(A.2.9) has a unique measure solution, which is given by:
i
( r
\
\ Jo
(M(-, 0, 0) = ( "0, 0(X(f; -, O))exp - / ao(X(s; -, 0), s) d
/
rt
+ / ds < /(.,j),0(X(r;.,j))exp
JO
rt
- / tfO(X(a; -, 5), a) da
\
Js
(A.2.10)
for all continuous test function 0.
Proof. Let us first check the uniqueness. Since the problem is linear we have
to show that 0 is the only solution to the homogeneous problem
/ (w(«, 0 , £*0O, 0) = 0, for all admissible 0.
Jo
Let V e Ll(0, T\ C°). In view of TheoremA.2.1, the problem
has a unique classical solution on [0, T]. This solution obviously satisfies the
properties required for the test function in (A.2.9). We therefore have
{u(-,t),if(-,t))dt
= 0, for all f e Ll(0, T; C°),
0
which implies u = 0.
Let us now prove that the formula (A.2.10) actually gives a solution to our
problem. If we replace 0 by L*0 in the right-hand side of (A.2.10) and if we
denote by A\ the term in front of w0 and by A2 the contribution of / , before
integration in time, we observe that
, r)exp - /
ao(X,s)ds
JO
- / ao(X,s)dsj\
where to simplify the notations we have replaced (X(s; x, 0), s) by (X, s).
Therefore
f
Ai(>9t))dt = -(u0,Uoi,T)exp(--[
ao(X, s) ds\ - 0(X, 0)
A.2. Classical and Measure Solutions
273
But (/>(•, T) = 0 and, with our notational convention, (X, 0) = (x, 0). Thus
Jo
For the contribution of / we similarly observe that
( f*
\
L*0(X(r, x, s),0exp( - / ao(X(a; x), a) ds I
\
=
Js
J
S 0(X(f;x, s),0exp( - / «o(X(a; x, s), a) ds ) >,
so that we have to compute
I=
= -- [[ dt
dt IIds
J
Jo
J
Jo
/(., s)9 j t U(X(t; ., s), t) exp("- / ao(X(a; ., 5), a) ^ ) } ) •
Integrating first over f then over s yields
' =- /
ds j
dtj/f(.,s)A<t>(X(t',;S),t)
( r
M
\
x e x p l - / a o (X((j;-,5),(7)^
)
\ Js
J)I
= /
d5(/(.,5),0O,5)>,
Jo
which finally proves that u satisfies (A.2.8).
D
Notice that the definition as well as the formula (A.2.10) is the most natural
extension of classical solutions: starting from the formula giving the classical
solution, if one takes the duality of the resulting function with a test function,
one obtains the formula (A.2.10) by using a change of variables along the
characteristics in the integrals. Let us also observe that the above theory can be
readily extended to forcing terms / which are time measure instead of integrable
time functions. Within this framework we can now define particle solutions.
Corollary A.2.6 (Fundamental example ofparticle solutions).
1) Assume uo = G?O<5(X — Xo) and f = 0. Then the measure solution of
(A.2.4) is given by
w(x, 0 = a(t)8(x - x(0)
(A.2.11)
274
Appendix A. Mathematical Tools
where x(t) = X(t; x, 0) and a satisfies
da
+ao(x(f),0a = 0; a(0) = a0.
dt
2) Ifu0 = 0and f = po8(x - x0) <g> 8(t - t0) then
u(x,t) =
p(t)8(x-X(t;xo,to))
where P(t) = Ofor t < to and, for t > t0,
dB
-j- + ao(X(t; xo, to), 0/3(0 = 0; P(t0) = Podt
Proof. These formulas easily follow from the general formula (A.2.10). Let us
only check the first one. If u is given by (A.2.11), then we have
which is precisely (A.2.10), once the ODE giving a has been explicitly integrated.
•
If ao = 0, the conservation of the weights of the particles in the solution
formula (A.2.11) can be seen as the result of a compensation effect between
the evolution of the local volumes (in case the flow is not incompressible) and
the modification of the local values of the underlying solution to the advection
equation.
Before going further let us point out that the above framework applies to the
case of systems as well. In this case the operator L takes the form
ot
U is a vector solution, a is a vector field and a : U is the vector of components
(52j ajUi)t anc* Ao is a square matrix. All the results and definitions above
remain unchanged, except for the definition of L* were Ao has to be replaced
by its transpose matrix. In particular, formula (A.2.11) remains valid (a is then
a vector-valued coefficient). This important point is useful for the definition and
analysis of vortex methods in three dimensions.
We now are in a position to address the second question raised in the preamble of this appendix, in the case of a deterministic initialization of the particles
(we do not consider here the case of random initializations, for which things
are far more subtle). From Theorem A. 1.1, we know that, for this type of
A.2. Classical and Measure Solutions
275
initialization, the initial discrepancy between the exact initial data and its particle approximation is naturally measured in a distribution space of the kind
W~m'p(Q). We have also seen that both the exact and the particle solutions
are explicit solutions to the advection equation. We therefore have to look for
stability properties of the advection equation in these spaces.
Regarding the smoothness of theflowfielda and of the coefficient «o, we will
keep the assumptions (A.2.5)-(A.2.6) already made to establish the regularity
result for the classical solutions. For a sake of simplicity in the notations, the
following stability result is stated for scalar problems. Its extension to systems
is straightforward.
Theorem A.2.7. Let m > 1. Under the assumptions (A.2.5)-(A.2.6), if fo e
W~m'P andfeLl(0,T;
W~m^\ the Cauchy problem
has a unique weak solution 0 e L°°(0, T\W~m'p).
Moreover this solution can be written 0 == X^=o 0*> where (pk e W~kjP for
0 < k < m and there exists a constant C{M, T) only depending on M and T
such that for t e [0, T]
A1-w||0uO,Ollo,p +
<C(M,T)
M|0o||-m,p+ / | | / O , * ) | | - m , p ^
(A.2.12)
This theorem will be the main ingredient for a unified convergence theory for
the two- and three-dimensional Euler equations. Before giving its proof let us
comment briefly on its meaning. First of all, if one thinks of the constant A
involved in the regularity assumptions for a, «o as an 0(1) term, then (A.2.12)
is just the natural stability result one could expect in the distribution spaces.
Next, if one allows A to take large values, A is then a scale factor which measures
the regularity of the flow field (in a viscous flow one can for instance think of
A as the square root of the Reynolds number), the splitting of the solution into
components of increasing smoothness and the estimates of these components
indicate that there is a compensation effect which makes that the largest part
of the solution concerns smooth (compared to the data) components of the
solution. In vortex methods these solutions will have to be regularized, and the
smoother the error components are, the less one will have to pay in the error
estimate for this regularization.
276
Appendix A. Mathematical Tools
Let us also mention that it is possible to generalize this result by allowing the
exponent p to take different values for the different components of the solution
(see Ref. 60 for this more general setting). This flexibility turns out to be useful
for the analysis of vortex methods in unbounded domains.
To establish our result, we need a distribution representation result, which is
nothing but a precise rephrasing of a classical result in distribution theory
Lemma A.2.8 [60]. Let T be a distribution that satisfies
m
^
(A.2.13)
for some positive constants Ck and all functions <p that are C°° with compact
support in Q (or periodic if we are in this situation). Then we can write
aeN2,|a:|<ra
\\TJ\-lalp < c w .
Proof. Denoting by p* the conjugate exponent to p, we classically begin by
viewing T as a linear continuous form on the subspace H e (LP*)N for an
appropriate value of N, containing the N-uplets made up by all derivatives of
order up to m of functions of Wm'p*.
We then provide (LP*)N with the following norm:
(fa)\a\<m ~* / ^ C<x II fa \\o,p* •
\a\<m
By virtue of relation (A.2.13), T has a norm less than or equal to 1 on H.
Thus we can extend T to the whole space (LP*)N, with a norm still less than
or equal to 1. But we know the forms of all such continuous linear mappings:
there exist Lp functions ga such that the extended mapping T can be given by
the following expression:
\a\<m *
It is now not difficult to check that this implies
l
d
A.2. Classical and Measure Solutions
277
By the choice we have made for the norm in H, we also have
|a|<m
|a|<m
for all (0 a ) e (Lp*)N. This proves that
\\ga\\o,P <c\a\,
and it remains to set Ta = [(dlalga)/(dx^
decomposition.
\OL\ <m
• • • dx% d)] to obtain the desired
D
We can now give the Proof of Theorem A.2.7.
Proof of Theorem A.2.7. We will prove only estimate (A.2.12) (see Ref. 60
for the existence and uniqueness of weak solutions in W~m'p). From Definition
A.2.4, the natural notion of weak solutions of Eq. (A.2.4) in W~m'p is
/ (f(;t),if(;
Jo
(A.2.14)
for all admissible test function (in the sense of (A.2.9) with C° replaced by
Wm'p*), where (•, •) denotes now the duality pairing between W~ m'p and Wm'p*.
Let £ be a function in L 1 (0, T; Wm'p*) and \j/ be the (classical) solution to
In view of Theorem A.2.3 (up to changing t into — t) we know that \// e
L°°(0,T\ Wm'p*) and, more precisely, for k < m and t < T,
p.
<C
k l
~ / H£(-,OlloW+ Y\ Ak~l /
Jo
fTZv
\tt',t)\k,p. dt
JO
(A.2.15)
We next choose the function £ of the form k(t)!=9 where X e Ll(0, T) and
^ G Wm'p*. Combining relations (A.2.14) and (A.2.15) yields
r
T
o
,F
MO (<P(-, t), £} dt < C\ \\<t>0\\-m,p + /
L
\ fT
1/
i
Il/O,
t)\\-m,p
Jo
v-
x / \k(t)\dt\ U m - 1 |||||o,p'+ J2 A
•
Itkp*
\
278
Appendix A. Mathematical Tools
This relation, valid for all X e Ll(0, T), implies that for all t e [0, T] and all
§ e Wm>p*
70
V^
Ain-i
Our claim follows then immediately from the representation Lemma A.2.8. •
A.3. Mathematical Facts about the Flow Equations
This section is devoted to some results concerning the incompressible NavierStokes equations. We focus on the statement of the results, without proofs, that
are necessary in the convergence studies in Chapters 2 and 3. For a thorough
mathematical discussion with emphasis on the vorticity form of the equations
we refer to a review article [142], books [193, 143], and the references therein.
As we have seen on several occasions, the flow equations couple two problems
of a different nature: a kinematic part (the calculation of the velocity in function
of the vorticity) and a dynamic part (the transport-diffusion equation for the
vorticity). It is thus convenient to give a separate account of the mathematical
properties related to these problems.
A.3.1. Kinematics
The kinematic part of the flow equations consists of solving the system
div u = 0,
V x u = w,
supplemented by boundary conditions. For the sake of simplicity, in the notation we consider here only periodic boundary conditions or equations in the
whole space R2 or R3 that vanish at infinity, but the estimates below extend to
domains with solid boundaries and the no-through-flow boundary condition. If
the vorticity is divergence free (a condition that of course applies only in three
dimensions) and is integrable, the solution this problem can be written as
u = K*u>.
(A.3.1)
A3. Mathematical Facts about the Flow Equations
279
In the case of periodic boundary condition, the above convolution should be
taken on an extension by periodicity of the vorticity to the whole space. Since,
roughly speaking, one obtains the velocity by integrating the vorticity, one may
expect that it is more regular. The following theorem summarizes the smoothing
property of the Biot-Savart kernel.
Theorem A.3.1 (Calderon). Let 1 < p < oo. For periodic boundary conditions, one has
p
.
(A.3.2)
For peridodic boundary conditions or solutions in Rd, d = 2, 3, one has
|K*o;|i, p <C|M|o,p,
(A.3.3)
and, if p < d and \/q = \/p — \/d (q = oo if p = d),
l|K*w||o,* <C|M| 0 ,p.
(A.3.4)
Note that, although it is natural to expect derivatives of the velocity to have
the same regularity as the vorticity, estimates (A.3.2) and (A.3.3) are not true
for p — oo. L°° estimates, however, can be recovered by use of the following
interpolation estimates, valid for p > d:
INIo,oc<C|N|^||7;,
s=d/p.
(A.3.5)
Relation (A.3.4) results from estimate (A.3.3) and Sobolev inequalities. The
fact that, in relation (A.3.4), q is larger than p reflects the fact that the velocity
decays at infinity at a slower rate than the velocity (typically, for a vorticity
with zero circulation and compact support, the velocity decays no faster than
l/r").
Finally it is important to stress that the above estimates can be rephrased
within the framework of distribution introduced in Section A.I. In the case of
boundary conditions, estimates (A.3.2) equivalently is given by
||K*w|| Of , < C | M U , P .
(A.3.6)
We refer to Ref. 60 for similar results in the case Q = R 2, R3. The regularization properties of K can be further strengthened if one uses mollified kernels.
For simplicity we assume here that we are in the periodic case. If £ is a smooth
cutoff function with a unit integral let us set £e = s~d^(x/s) and K£ = K*£ e .
280
Appendix A. Mathematical Tools
Let T e W~m'p(Q) with m > 1. By the representation Lemma A.2.8, we can
write
\a\<m-\
with / „ e
and ||/ a ||_i i P < C\\T\\.m,p. Therefore
|a|<ra-l
It is readily seen by a change of variables that || dat;E ||o, 1 <
of relation (A.3.6), we obtain
, and, in view
(A.3.7)
Let us finally sketch the proof of the Poincare identity [Eqs. (4.2.12) and
(4.3.19)]. We will focus on the three-dimensional case. Let us start with scalar
formula (4.2.12). We consider a volume of fluid, as shown in Figure A.I. The
volume of fluid may contain bodies, but it can be rendered simply connected
if thin tubes are drawn that join the surface of the body with the outer surface.
Since l/|x - x'| does not satisfy Laplace's equation at x we exclude this point
from the volume by surrounding it with a sphere with a surface E and of radius s.
Figure A.I. Geometrical definitions of a domain that includes a body.
A3. Mathematical Facts about the Flow Equations
281
t
Figure A.2. Infinitesimal volume around a point x (see Eq. A.3.9).
By using the Green's theorem we obtain
_
\
$ n
V-B(x,e) | v
v /|
lx ~ x I
X — X
(A.3.8)
Integration over the infinitesimal tubes joining £ and S2 and 5i and S2 vanishes
by continuity of <l>. On the surface £ we have that (see Fig. A.2)
x - x' = - e e r , n = - e r , dx' = £2sin(0)
V-
1
|x — x'\
x - x'
er
\x — x
s3
_Y'|3
dO d<t>,
(A.3.9)
(A.3.10)
Hence
n-VcD(x/)
|x — x'
p2ji
,
-<D(x ; )n.V
pn
f dcp f
7o
Jo
1
x
-
x
I
e2^si
£2
(A.3.11)
(A.3.12)
(A.3.13)
On the other hand
/
JB(x,e) l x ~
X
r
1
Hence, taking the limit as e - • 0, we obtain Eq. (4.2.12).
(A.3.14)
282
Appendix A. Mathematical Tools
In the case of a two-dimensional domain we use i/r = log(|x|) in the Green's
theorem and we can obtain similar results.
Let us now turn to vector identity (4.3.19). We define
A(x) = - 1 - [-^±-dx'.
An JV.
|X
(A.3.15)
- x'|
Using Poisson's formula, we obtain that
)
V™*
.
if x in Ve
(A.3.16)
A relationship between the vorticity and the velocity field can be obtained with
the vector identity:
V x V x A = V(V-A) - AA.
(A.3.17)
Taking the curl and the divergence of the vector quantity A we have that
V x A = - 1 f<y**Md*
An JVi |x - x'|
V •A = ± / ( V U ) ( x ) ^
An JVi |x - x'|
+
+
JL f ^ ^ l ^
(A.3.18)
i- [ * ^ l d * .
An JSi |x - x'|
(A.3.19)
An JSi |x - x'|
Finally Poincare formula (4.3.19) is obtained when Eqs. (A.3.16), (A.3.18),
and (A.3.19) are substituted in Eq. (A.3.17).
A.3.2. Dynamics
We now turn to the full, nonlinear flow equations. We quickly review some
important features of these equations, and distinguish between inviscid and
viscous flows.
Inviscid Case
In two dimensions, the incompressible Euler equations consist of a transport
equation with the vorticity coupled with system (A.3.1) for the velocity calculation. As for the linear transport equation, the vorticity is advected with the
flow: With the notations introduced in Section A.I for the characteristics,
x, t) = cc>0[X(0; x, 0L
(A.3.20)
where CJQ is the initial vorticity field. Note that this formula is valid for flows in
A3. Mathematical Facts about the Flow Equations
283
the R2 as well as in domains with solid walls and either periodic or no-throughflow boundary conditions. Of course it requires that the characteristics be well
defined, which implies some kind of regularity in the flow. One can prove that
a bounded vorticity is enough to ensure this minimal smoothness. If the initial
vorticity is bounded, formula (A.3.20) forces the vorticity to remain bounded
for all time, and a boot-strap argument yields a bounded solution to the flow
Euler equations.
If the initial vorticity is not bounded, one can still prove the existence of weak
solutions to the Euler equations as long as UJQ e LP(R2) for some p > 1, and
in this case it results from the incompressibility of the flow that \\co(-, Olio,/? =
|&>ollo,/?- For p = 2,in particular, this is the conservation of the enstrophy. An
important case of even weaker regularity is the case of a vortex sheet. As we
have said in Chapter 2, if the strength of the sheet is an analytic function, it
remains so for a short time. Without this analyticity assumption, weak solutions
can be obtained if the strength has a definite sign.
In three dimensions the vorticity transport equation is augmented by the
stretching term (CJ • V)u, which causes the enstrophy to change in time.
The vorticity and the velocity gradients involve derivatives of the same order, so the stretching term acts a quadratic forcing on the vorticity equation.
The possibility of a blow up of the solution in a finite time, even starting from
a very smooth initial vorticity, cannot be excluded.
Viscous Equations
In the presence of viscosity, the molecular dissipation has a mollifying effect on
the fields. In two dimensions and for periodic boundary conditions or flows in
the whole space, this results in a decay of the enstrophy (for wall-bounded flows
with no-slip boundary conditions, this is not true due to the vorticity generation
at the walls). It also guarantees the well posedness of the equations for less
smooth initial vorticity (for example, an initial vorticity consisting of a vortex
sheet or even Dirac masses).
In three dimensions, it gives the existence of finite-energy solutions for all
times. However, the existence of solutions that remain smooth for all time is an
open problem.
Appendix B
Fast Multipole Methods for
Three-Dimensional N-Body Problems
A fundamental issue in the use of vortex methods is the ability to use efficiently
large numbers of computational elements for simulations of viscous and inviscid
flows.
The traditional cost of the method scales as O(N2) as the TV computational
elements and particles induce velocities at each other, making the method unacceptable for simulations involving more than a few tens of thousands of
particles. We reduce the computation cost of the method by making the observation that the effect of a cluster of particles at a certain distance may be
approximated by a finite series expansion. When the space is subdivided in
uniform boxes it is straightforward to construct an O(N3^2) algorithm [189]. In
the past decade faster methods have been developed that have operation counts
of O(N log N) [17] or O(N) [91], depending on the details of the algorithm. In
these algorithms the particle population is decomposed spatially into clusters
of particles (see, for example, Figure B.I) and we build a hierarchy of clusters
(a tree data structure) - smaller neighboring clusters combine to form a cluster
of the next size up in the hierarchy and so on. The hierarchy allows one to determine efficiently where the multipole approximation of a certain cluster is valid.
The Af-body problem appears in manyfieldsof engineering and science ranging from astrophysics to micromagnetics and computer animation. In the past
few years these Af-body solvers have been implemented and applied in simulations involving vortex methods. Koumoutsakos and Leonard [ 125] implemented
the Greengard-Rohklin (GR) scheme in two dimensions for vector computer
architectures, allowing for simulations of bluff-body flows with millions of
particles. Winckelmans et al. [201] presented three-dimensional, viscous simulations of interacting vortex rings by using an implementation of a Barnes-Hut
(BH) scheme for parallel computer architectures. Bhatt et al. [30] presented
a vortex filament method to perform inviscid vortex ring interactions, with an
284
285
Appendix B. Fast Multipole Methods
1f
k
V.
IJ
•
Figure B.I. A spiral distribution of particles decomposed into a hierarchy of clusters.
alternative implementation of a BH scheme for a Connection machine parallel
computer architecture.
Historically the BH method was first implemented for large-scale astrophysical simulations. Several Af-body algorithms are extensions of tree codes originally developed for gravitational interactions [201]. This has been motivated
not only by the ease of implementation to a variety of applications, but also by
the fact that in three dimensions the GR scheme suffers from the large computational cost of O(p4) associated with the translation of a /?th-order multipole
expansion. This cost has prohibited the use of large numbers of terms in the
multipole expansions and has led to the general adoption of the BH method for
Af-body solvers. In a related effort to simplify the multipole expansion schemes,
Anderson [7] presented a computational scheme based on the Poisson integral
formula (hereafter referred to as PI). Greengard [92] presented a strategy to
286
Appendix B. Fast Multipole Methods
reformulate the translation of the expansions of the original GR scheme as convolution operators, thus enabling the use of fast Fourier transforms (FFTs) and
the reduction of the computational cost to O(p2) operations. This strategy has
been concisely summarized and extended in the work of Epton and Dembart
[80]. If one can overcome the O(p4) difficulty, it may be beneficial to adopt the
GR strategy, as by using a sufficiently large number of expansions, we avoid
the costly pairwise interactions. The pairwise interactions usually account for
most of the computational cost of the algorithm, and we try to minimize their
number by using large numbers of expansions. Note that a large number of
pairwise interactions may lead to algorithms of, say, O(NlA) that would be inefficient for simulations involving hundreds of millions of particles [30]. Finally
the particulars of the problem at hand and the distribution of the Lagrangian
computational elements can play important roles in the selection of a suitable
method. For example, Brady [35] has constructed an efficient N3/2 algorithm
for three-dimensional vortex sheet simulations, keeping only a few terms in
the expansions. On the other hand the efficiency of the approach of using large
numbers of terms in the expansions has been quite effective in simulations of
two-dimensional bluff-body and inviscid flows.
In this appendix we present a summary of the GR multipole expansion scheme
with efficient O(p2) multipole translations for general Af-body problems. We
compare the efficiency of computing the expansions based on the GR and
the PI formulations. We discuss also the implementation of a suitable tree
data structure that has been shown to be quite effective for vector computer
architectures.
B.I. Multipole Expansions
We present a summary of the multipole expansions technique as presented by
Greengard and Rohklin [91] and Anderson [7]. We conduct some computations
to assess the accuracy and the efficiency of the two techniques and describe the
fast multipole translation theory following Epton and Dembart [80]. Finally we
describe our tree data structure and its implementation so as to take advantage
of vector computer architectures.
B.I.I. The Greengard-Rohklin Formulation
In order to introduce the subject of multipole expansions, we consider a unit
source at a point Q(x') (Figure B.2). This unit source induces a potential at
point P(x) given by
vi/(p; Q) = vi/(X; x ') =
|xx'|
,
(B.I.I)
B.I. Multipole Expansions
287
Figure B.2. Coordinate definition for multipole expansion.
where the spherical coordinates of x and x' are given by (r, 0, 0) and (p, a, f$)
respectively. The distance between the two points is denoted by R and the angle
between vectors x and x' is denoted as y. If we define /x = p/r and u = cos y
then the potential at point Q may be expressed as
1
R
(B.1.2)
For /x = p/r < 1, we use the generating formula for Legendre polynomials
Pn so that the potential is expressed as
(B.1.3)
n=0
This equation describes the far-field potential at a point P, that is due to a charge
of unit strength centered at Q. To obtain a computationally tractable formulation
we proceed to express the Legendre functions in terms of spherical harmonics,
Pn(cosy)= 2_^ Y-m(a,P)Y™(6,(p)
(BAA)
m=—n
and the spherical harmonics in terms of the associated Legendre polynomials,
(B.1.5)
288
Appendix B. Fast Multipole Methods
The following numerically stable formulas are used for calculations:
(n-m)P™(u)
= (In P™(u)
Y)uP™_ x(u) - (n + m - \)P™_ 2(u)
= (-l) m (2m - 1)!(1 - u1)^.
(B.I.6)
(B.1.7)
Summarizing, we see that the far-field representation of the potential induced
by a collection of Nv sources centered around Q with coordinates (pt, at, # )
is expressed as
*(P; {</,}) = J2 E ^ r C ( « . *>)•
(B.1.8)
n=0m——n
where:
Note that if we wish to form a local expansion of the field around the origin
then we express 1/R as
^ =
=
(B.I.10)
B.I.2. Translation of Multipole Expansions
Once the multipole expansions due to a collection of sources have been computed, one is usually interested in computing the far-field coefficients of the
same collection expanded about some other point, say S, so that the potential
would be represented as
P) = Y, Yl ^ T l O 0 ' *)
(B.I.12)
n=0m=—n
where (or, 0 , O) are the spherical coordinates of the distance between points P
andS.
This defines the translation problem for multipole expansions for fast multipole methods. Following Refs. 92 and 80 we present a concise summary of
the theory underlying the translation of multipole expansions. We make use of
B.I. Multipole Expansions
289
the following definitions of harmonic outer functions (9™ and inner functions
jm.
rn+\
(B.I.13)
(B.I.14)
More specifically for |x| > |x'| we obtain
(B.I.15)
'=0 m'=—n'
and for the inner expansions we get that
(B.I.16)
'=0 m'=—n'
so now we may express the equation for the potential induced at point x from
a unit source at point x' as
1
x—
- = O0°(x-x').
(B.I.17)
In order to exhibit further the formulation of these translation operators we
consider the configuration shown in Figure B.3. We wish to determine the potential induced by a collection of sources within a sphere centered at xo and
having radius Ro [denoted as s(x 0 , Ro)] to a collection of points/sources within
a sphere s(x 3 , R3). This is achieved in the following steps:
Figure B.3. Sketch for the translation of the multipole expansions.
290
Appendix B. Fast Multipole Methods
(i) We compute a set of multipole expansion coefficients C™ [by using
Eq. (B.1.8)] for the far-field representation of a set of sources distributed
within S(XQ, RQ). Then the far-field representation of the field induced by
this cluster of particles at a location x is given by
C
n°nm(*
~ *>)•
(B.I.18)
n=0m=—n
(ii) We translate the outer expansion about Xo to an outer expansion about xi
(child to parent):
oo
/
^(x) = J2 E DJO^ix-x,),
(B.I.19)
/=o j=-i
where
/
n
D{ = Y, E C C ( x i - xo).
(B.1.20)
n=0m=—n
(iii) We translate the outer expansion about xi to an inner expansion about X2
(box-box interaction):
00
/
/=o j=-i
where
E
/
n
> =Y,Y,
n=0m=—n
ATor+rm(x2 - x,>.
(B.1.22)
(iv) We translate the inner expansion about X2 to an inner expansion about X3
(parent to child):
00
/
J2J2 F///(x - X3>'
1=0 j=~i
(B L23)
-
where
/
n
F/ = Y,T,
n=0m=—n
£
"C7'(X3 - x2).
(B.1.24)
B.2. The Poisson Integral Method
291
(v) Once the coefficients of the multipole expansions have been computed in
the sphere s(x 3 , R3) we perform a local expansion by using Eq. (B.I.11)
to compute the potential at the individual points.
The above representations for the translation operations of spherical
harmonics reveal that they require the evaluation of double summations
that are essentially convolution operations over the coefficients of the expansions and can essentially be computed with two-dimensional FFTs.
B.2. The Poisson Integral Method
In order to approximate the potential due to a collection of particles, Anderson
[7] proposed an alternative simplified technique. This technique is based on
the observation that a harmonic function (4>) external to a sphere of radius R
may be described with its boundary values g(Rs) on the surface of the sphere.
So given a point x we define x^, a point on the unit sphere that points in the
direction of x, so that:
g(Rs)ds,
(B.2.1)
where S2 denotes the surface of the unit sphere and Pn is thercth-orderLegendre
polynomial. We use a quadrature formula to integrate the function on the surface of the sphere with K integration points S; and weights W( to obtain an
approximation of the form
M
4TT
i—\
_n=0
\ r I
(B.2.2)
In order to compute the far-field multipole expansion of a cluster of particles
based on this formulation, the function g(Rs) is determined on certain quadrature points on the surface of a sphere by use of the direct interactions of the
potential induced by the sources onto the evaluation points. Subsequently these
coefficients are used in approximation (B.2.2) to compute the potential induced
at distances sufficiently large compared with the radius of the cluster. In order
to translate the expansions, we may use the above formula again by considering
the coefficients of g(Rst) on the inner sphere to be sources themselves. We
complete the method by observing that a local expansion approximation may
292
Appendix B. Fast Multipole Methods
Figure B.4. Sketch for the translation of the multipole expansions with the PI technique.
be constructed by using the following formula.
rM
(B.2.3)
Note that the expansions are in terms of r/R in this formula.
Anderson [7] showed that approximations with M = 2p + 1 terms may be
compared with multipole schemes that have p terms retained in the expansions.
The strength of this method relies on its simplicity and its easy extension from
two to three dimensions. This is exhibited if the implementation of this technique
is considered in the context of an O (N) algorithm for the computation of the
potential field induced by a set of particles within a sphere s (xo, Ro) to a cluster
of points in s (xo, Ro) (Figure B .4). This interaction is performed in the following
steps:
(i) The potential induced by the particles (denoted in Figure B.4 by dots)
is computed on quadrature points properly selected on the surface of the
enclosing sphere (denoted in Figure B.4 by + ), thus constructing the
function g(RoSi)
(ii) The potential induced by the quadrature points on ,s(xo, Ro) is computed
on the quadrature points of s(x\, R\) with approximation (B.2.2).
(iii) The coefficients g(R\Si) are considered to be sources themselves so that
the coefficients g(/?2S/) are computed with approximation (B.2.2).
(iv) The coefficients g(/?3S/) are computed subsequently by performing a local
expansion from the quadrature points on sphere s (X2, Ri) to the quadrature
points on the sphere s(x 3 , R3) with approximation (B.2.3).
B. 3. Computational Cost
293
(v) By use of approximation (B.2.3) the potential on the particles inside the
sphere s(x3, /?3) is computed with the coefficients
The simplicity of the formulas implemented in this technique make it an
attractive alternative to the multipole expansion method of GR. We consider
below a comparison of the two methods in terms of their accuracy and computational cost.
B.3. Computational Cost
The computational cost, associated with the multipole expansions of the GR
scheme, scales as O (p2 N) for the multipole-particle operations and as O (log TV
p2) for the multipole translation operations that use the convolution formulation discussed above. For the PI formulation, assuming K integration points
and M terms in the Poisson kernel, the cost scales as O(K x M x N) for
the particle-multipole interactions and as O(K x K x M) for the multipole
translation. Both algorithms have error terms that scale as (R/r)L+l, where
L corresponds to p terms in the multipole method and to M + 1 for the PI
scheme. The number of the required integration points (K) corresponding to
5th-, 7th-, 9th-, and 14th-order quadrature formulas require 12, 24, 32, and 72
points, respectively, or approximately K ^ 2m 2 /5 points for an mth-order integration formula. So in order to achieve the same accuracy with the PI method
as with the multipole scheme we require that m & M % P. This then implies
a computational cost of O (p3 N) for the particle-multipole interactions while
it implies an O(log N p5) cost associated with the multipole translations.
Although such estimates depend on the particular implementation of the
method, it is evident that for the same order of accuracy the multipole method
with fast translation operations would lead to much faster computations, especially for large expansion orders. Moreover, in the particular implementation
of the methods it was easier to unroll the computational loops involving the
particle-multipole interactions for the GR scheme than the respective operations in the PI scheme. In (Figure B.5) we present also the relative error as
computed by the two methods by using P = 8 and different values of m in the
PI method.
In Figure B.6 we present some representative timing results for the construction of the multipole expansions as well as for the particle-multipole interactions. A number of N particles were distributed randomly inside a cube of side
2 and the potential was evaluated on L points uniformly distributed along a
line extending from the center of the cube and along one of its sides. The first
Appendix B. Fast Multipole Methods
294
LU
10
r/R
Figure B.5. Relative errors of the GR and the PI multipole expansion schemes: Solid
curves, GR, P = 8; dashed curve, PI, m = 14; dotted curve, m = 9; dashed-dashed
curve, m = 7; dashed-dotted curve, m = 5.
N
10
5
L
10 5
6
10
6
Multipoles
m=5
m=7
m=9
m = 14
P =8
0.0708
0.1397
0.1863
0.4191
0.1023
0.5268
0.5844
0.7111
1.4219
1.8968
4.2680
1.0251
5.2724
5.8516
6.4145
10.8925
0.9585
0.6395
1.0870
0.0959
10
Figure B.6. Computational cost of the fast multipole method and the PI method.
line corresponds to the CPU time required for the construction of the multipole
expansions while the second line corresponds to the CPU time required for performing the particle-multipole expansions. It is observed then that when the GR
multipole expansion scheme is used, 1-order-of-magnitude faster calculations
are achieved for the same order of accuracy.
B.4. Tree Data Structures
A key issue in the implementation of fast multipole methods is the associated data structure and the computer platform. We present a methodology that
BA. Tree Data Structures
295
has been successfully implemented for the GR algorithm on vector computer
architectures. Several of its features could be carried over to parallel platforms involving large numbers of vector processors. The GR scheme relies
on a predetermined tree data structure and a large number of terms to be kept
in the expansions while the BH scheme determines the interaction list while
traversing the tree data structure, and a trade-off is made between the number
of terms kept in the expansions (usually two to four) and the distance at which
the expansions are favored over direct interactions.
In order to exploit the observation that the effect of a cluster of particles at a
certain distance may be approximated by a finite sum of series expansions by
using the equations described above, we need to organize the particles into a
hierarchy of clusters. This hierarchy of clusters allows us to determine efficiently
when the approximation is valid. In order to establish the particle clusters we
may resort to a tree-building algorithm.
The contribution of a cluster of particles to the potential of a given vortex
can then be computed to desired accuracy if the particle is sufficiently far from
the cluster in proportion to the size of the cluster and a sufficiently large number of terms in the multipole expansion are taken. This is the essence of the
particle-box method, requiring O(N log N) operations. One then tries to minimize the work required by maximizing the size of the cluster used while keeping
the number of terms in the expansion within a reasonable limit and maintaining
a certain degree of accuracy.
The box-box scheme goes one step further as it accounts for box-box interactions as well. These interactions are in the form of shifting the expansions
of a certain cluster with the desired accuracy to the center of another cluster.
Then those expansions are used to determine the velocities of the particles in
the second cluster. This has as the effect of minimizing the tree traversals for
the individual particles requiring only O(N) operations.
In order to construct the tree data structure, the three-dimensional space is
considered to be a cube enclosing all computational elements. We apply the
operation of continuously subdividing a cube into eight identical cubes until
each cube has only a certain maximum number of particles in it or a maximum
allowable level of subdivisions has been reached.
The hierarchy of boxes defines a tree data structure that is common for both
algorithms. The tree construction proceeds level by level starting at the finest
level of the particles and proceeding upward to coarser box levels. Because of
the simplicity of the geometry of the computational domain, the addressing of
the elements of the data structure is facilitated significantly. As the construction
proceeds, pointers are assigned to the boxes so that there is direct addressing of
thefirstand the last particle index in them as well as direct access to their children
296
Appendix B. Fast Multipole Methods
and parents. This facilitates the computation of the expansion coefficients of
the children from the expansions of the parents for the box-box algorithm and
the expansions of the parents from those of the children for the particle-box.
The data structure is used to determine when the expansions are to be used
and when pairwise interactions have to be calculated. It helps in communicating
to the computer the geometric distribution of the particles in the computational
domain. The particles reside at the finest level of the structure. Clusters of
particles form the interior nodes of the tree, and hierarchical relations are established. The data structure adds to the otherwise minimal memory requirements
of the vortex method.
The tree has to be reconstructed at every step as the particles change positions
in the domain. There are several ways that nearby particles could be clustered
together and some of the decisions to be made are
The center of expansions. Usually the geometric center of the cells is used
as it facilitates the addressing of the data structure.
The cluster size. In our experience we find beneficial to follow a hybrid strategy as we keep at least Lmin particles per box until we reach a predetermined
finest level of boxes. The number Lmin may be chosen by the user, depending on the particle population and configuration so as to achieve an optimal
computational cost.
Addressing the clusters. As particles are usually associated with a certain box,
it is efficient to sort the particle locations in the memory so that particles that
belong to the same box occupy adjacent locations in the memory devoted to the
particle arrays. Such memory allocation enhances the vectorization significantly
as very often we loop over particles of the same box (e.g., to construct the
expansions at the finest level, or to compute interactions) and the loops have an
optimum stride of one.
We now describe two algorithms, a particle-box (PB) and a box-box (BB),
in which we may distinguish three stages:
• Building the data structure (tree).
• Establishing the interaction lists (by nonrecursively descending the tree).
• Computing pairwise interactions for all particles in the domain.
The building of the data structure is common for PB & BB algorithms, but they
differ in the tree descent and the pairwise interactions. Care has been exercised
at all stages to maximize vectorization. In our respective two-dimensional implementation, the building of the data structure consumes ^5%-7% of the time,
the descent consumes another 5%-10%, so that the largest amount is spent in
computing the pairwise interactions.
B.4. Tree Data Structures
297
B.4.1. The Particle-Box Algorithm
Step 1: Building the Data Structure (Tree). Step la: For each of the cubes
at each level that is not further subdivided, we compute the p terms of the
multipole expansions. These expansions are used to describe the influence
of the particles at locations that are well separated from their cluster.
Step 1b: We construct the expansions of all parent boxes by shifting the
expansion coefficients of their children. The tree is traversed upward in this
stage. Rather than constructing the expansions of all the members of a family
(that is, traverse each branch until the root is reached) we construct the
expansions of all parent boxes at each level simultaneously. This enables long
loops over the parent boxes at each level. Care is taken so that the procedure is
fully vectorized by taking advantage of the regularity of the data structure and
the addressing of the boxes in the memory. Moreover, the regularity of the data
structure allows us to precompute many coefficients that are necessary for
the expansions. Straightforward implementation of these translations leads
to a computational cost of O (p4). This has been the major reason that several
implementations of the algorithm have used only up to p = 3 terms in the
multipole expansions. However, such an approach results in large numbers
of particle-particle interactions and hence a large computational cost. We
can implement the technique proposed in Ref. 92 (see above) to reduce the
computational cost of this translation to O(p2) operations by observing that
this translation amounts to a convolution, and we use FFTs.
Step 2: Establishing of Interaction Lists. In the present algorithm a breadthfirst search is performed at each level to establish the interaction lists of each
particle (cell). This search is facilitated by the regularity of the data structure
and the identification arrays of the cells in the tree. At each level interaction
lists are established for the particles (cells) by looping across the cells of a
certain level.
Note that this depth-first search for interaction lists is further facilitated by
the fact that every particle belongs to a childless box. It is easy then to observe that all particles in the same box share the same interaction list, which
comprises members of the tree that belong to coarser levels. In this way the
tree is traversed upward for all particles in a childless box and downward
separately for each particle. It is evident that this procedure is more efficient
for uniformly clustered configurations of particles because there would be
more particles that belong to childless boxes at the finest level.
Step 3: Computation of the Interactions. Once the interaction lists have
been established, we compute the velocities of the particles by looping over
the elements of the lists. For particles that have the same boxes in their
298
Appendix B. Fast Multipole Methods
interaction list, this is performed simultaneously so that memory referencing
is minimized. Moreover, by systematically traversing the tree, we make the
particle-particle interactions symmetric so that the cost of this computation
is halved. The cost of this step is O(Np2).
B.4.2. The Box-Box Algorithm
This scheme is similar to the particle-box scheme except that here every node
of the tree assumes the role of a particle. In other words, interactions are not
limited to particle-particle and particle-box but interactions between boxes are
considered as well. Those interactions are in the form of shifting the expansion
coefficients of one box into another and the interaction lists are established with
respect to the locations of every node of the tree.
The scheme distinguishes five categories of interacting elements of the tree
with respect to a cell denoted by c.
• List 1: All childless boxes neighboring c.
• List 2: Children of colleagues (boxes of the same size) of c's parents that are
well separated from c. All such boxes belong to the same level with c.
• List 3: Descendants (not only children) of c's colleagues whose parents are
adjacent to c but are not adjacent to c themselves. All such boxes belong to
finer levels.
• List 4: All boxes such that box c belongs to their list 3. All such boxes are
childless and belong to coarser levels.
• List 5: All boxes well separated from c's parents. Boxes in this category do
not interact directly with the cell c.
If the cell c is childless it may have interacting pairs that belong to all four
lists. However, if it is a parent it is associated with boxes that belong to lists
2 and 4, as described above. These observations are directly applied in our
algorithm and we may distinguish again the following 4 steps.
Step 1: Building the Data Structure. This procedure is the same as that for
the particle-box scheme. This fact enables us to compare directly the two
algorithms and assess their efficiency.
Step 2: Construction of Interaction Lists. To establish the interaction lists
we proceed again level by level, starting at the coarsest level. For each level
we distinguish childless and parent boxes. In establishing lists 1 and 3 we
need only loop over childless boxes, whereas to establish lists 2 and 4 we
loop over all cells that are active in a certain level.
B.4. Tree Data Structures
299
Step 2a: Here we establish lists 1 and 3. We start at the level of the parents
of box c and we proceed level by level, examining again breadth first, until
we reach the finest level of the structure (the particles). The elements of list 1
are basically the particles and account for the particle-particle interactions.
Care is exercised so that this computation is symmetric, and we need to traverse the tree downward only, thus minimizing the search cost. The elements
of list 3 are the boxes and are accountable for the particle-box interactions
in this scheme.
Step 2b: Here we establish interaction lists 2 and 4 for all boxes in the
hierarchy. We start at the coarsest possible level and proceed downward
until reaching the level of box c to establish the interaction lists. To do so
for a certain box, we start by examining boxes that are not well separated
from their parents (otherwise they would have been dealt with at the coarser
level). Subsequently the children of those boxes are examined to establish
interaction lists.
Step 3: Computations of the Interactions. In this scheme we consider three
kinds of interactions: the box-box, particle-box, and particle-particle interactions. The latter two categories were discussed in the previous section.
For the box-box interactions, once the respective interaction lists have been
established (with members of lists 2 and 4), we need to transfer those expansions down to those of the children and add them to the existing ones.
We vectorize this procedure by looping over the number of boxes at each
level. The use of pointers to access the children of each box enhances this
vectorization. Note that we can calculate an arbitrarily high number of expansions efficiently by unrolling the loop over the number of expansions into
the previously mentioned loop.
In summary, a fast N-body solver can be implemented for a number of different cases in vortex methods (such as fast velocity evaluation among vortices,
solution of the systems arising in panel methods, fast Poisson solver for the
streamfunction-vorticity formulation in complex geometries, etc.). The speed
and the efficiency of the final computer code may depend strongly on the physical problem as well as on the programmer and the particular computer architecture that is being implemented.
Bibliography
[1] Abramowitz, M. and Stegan, LA. 1964, Handbook of Mathematical Functions,
Dover, New York.
[2] Adams, R. 1975, Sobolev Spaces, Academic, New York.
[3] Albuquerque, C. 1999, Ph.D. thesis, University of Lisbon, Portugal.
[4] Anderson, C. 1985, A vortex method for flows with slight density variation,
J. Comput. Phys. 61, 417-444.
[5] Anderson, C. 1986, A method of local corrections for computing the velocity
field due to a distribution of vortex blobs, J. Comput. Phys. 62, 111-123.
[6] Anderson, C. 1989, Vorticity boundary conditions and boundary vorticity
generation for two-dimensional viscous incompressibleflows,J. Comput. Phys.
80, 72-97.
[7] Anderson, C. 1992, An implementation of the fast multipole method without
multipoles, SIAM J. Sci. Stat. Comput. 13, 923-947.
[8] Anderson, C. and Greengard, C. 1985, On vortex methods, SIAM J. Num. Anal.
22,413-440.
[9] Anderson, C. and Greengard, C , eds. 1988, Vortex Methods, Vol. 1360 of
Lecture Notes in Mathematics Series, Springer-Verlag, Berlin.
[10] Anderson, C. and Greengard, C. 1988, Vortex ring interaction by the vortex
method, in Ref. 9, pp. 23-36.
[11] Anderson, C. and Greengard, C, eds. 1991, Vortex Dynamics and Vortex
Methods, Vol. 28 of Lectures in Applied Mathematics Series, American
Mathematical Society, New York.
[12] Anderson, C. and Reider, M. 1994, Investigation of the Prandtl Navier-Stokes
equation procedures for two-dimensional incompressible flows, Phys. Fluids 6,
2380-2389.
[13] Appel, A. 1985, An efficient program for many-body simulation, SIAM J. Sci.
Stat. Comput. 6, 85-103.
[14] Aref, H. 1983, Integrable, chaotic and turbulent vortex motion in
two-dimensional flows, Ann. Rev. Fluid Mech. 15, 345-389.
[15] Baker, G.R. and Shelley, MJ. 1986, Boundary integral techniques for
multi-connected domains, J. Comput. Phys. 64, 112-132.
[16] Bar-Lev, M. and Yang, H.T. 1975, Initial flow field over an impulsively started
circular cylinder, J. Fluid Mech. 72, 625-647.
[17] Barnes, J.E. and Hut, P. 1986, A hierarchical O(N log N) force-calculation
algorithm, Nature (London) 324, 446-449.
301
302
Bibliography
[18] Batchelor, G.K. 1967, An Introduction to Fluid Dynamics, Cambridge
University Press, Cambridge.
[19] Beale, J.T. 1986, A convergent 3d vortex method with grid-free stretching, Math.
Comput. 46, 401-424.
[20] Beale, J.T. 1988. On the accuracy of vortex methods at large time, in
Computational Fluid Dynamics and Reacting Gas Flows, B. Engquist et al.,
eds., Springer-Verlag, New York, pp. 19-32.
[21] Beale, J.T. and Greengard, C. 1993, Convergence of Euler-Stokes splitting of
the Navier-Stokes equations, Commun. Pure Appl. Math. 46, 1083-1115.
[22] Beale, J.T., Cottet, G.-H., and Huberson, S., eds. 1993, Vortex Flows and
Related Numerical Methods, NATO ASI Series, Kluwer Academic, Dordrecht,
The Netherlands.
[23] Beale, J.T., Eydeland, A., and Turkington, B. 1991, Numerical Tests of 3-D
Vortex Methods Using a Vortex Ring with Swirl, Ref. 11, 1-10.
[24] Beale, J.T. and Majda, A. 1981, Rates of convergence for viscous splitting of the
Navier-Stokes equations, Math. Comput. 37, 243-259.
[25] Beale, J.T. and Majda, A. 1982, Vortex methods II: high order accuracy in 2 and
3 dimensions, Math. Comput. 32, 29-52.
[26] Beale, J.T. and Majda, A. 1985, High order accurate vortex methods with
explicit velocity kernels, J. Comput. Phys. 58, 188-208.
[27] Belotserkovskii, S.M., Skripach, B.K., and Tabachnikov, V.G. 1971, Wing in
Unsteady Gas Flow Nauka, Moscow.
[28] Belotserkovskii, S.M. and Lifanov, I.K.H. 1993, Methods of Discrete Vortices,
CRC, Boca Raton, FL.
[29] Benfatto, G. and Pulvirenti, M. 1986, Convergence of Chorin-Marsden product
formula in the half-plane, Commun. Math. Phys. 106, 427-458.
[30] Bhatt, S., Liu, P., Fernandez, V., and Zabusky, N. 1995, Tree codes for vortex
dynamics: Application of a programming framework, Workshop on Solving
Irregular Problems on Parallel Machines, Santa Barbara, CA, April 25-28.
[31] Blasius, H. 1908, Grenzchichten in Fliissigkeiten mit Kleiner Reibug. Z. Angew.
Math. Phys. 56, 1-20.
[32] Bouard, R. and Coutanceau, M. 1980, The early stage of development of the
wake behind an impulsively started cylinder for 40 < Re < 104, J. Fluid Mech.
101, 583-607.
[33] Brackbill, J. and Khote, D. 1988, FLIP: a method for low-dissipation particle in
cell method for fluid flow, Comput. Phys. Commun. 48, 25-38.
[34] Brackbill, J. and Ruppel, H. 1986, Flip: a method for adaptively zoned, particle
in cell calculations of fluid flows in two dimensions, J. Comput. Phys. 65,
314-343.
[35] Brady, M. 1998, Ph.D. dissertation, Caltech.
[36] Brenier, Y. 1985, Une methode particulaire pour les equations non lineaires de
convection-diffusion en dimension 1, Rapp. Rech. 0422, INRIA.
[37] Brenier, Y and Cottet, G.-H. 1995, Convergence of vortex methods with random
rezoning for the 2-D Euler and Navier-Stokes equations, SIAM J. Num. Anal.
32, 1080-1097.
[38] Buntine, J. and Pullin, D. 1989, Merger and cancellation of strained Vortices,
J. Fluid Mech. 205, 263-295.
[39] Caflish, R., ed. 1989, Mathematical Aspects of Vortex Dynamics, Society for
Industrial and Applied Mathematics, Philadelphia, PA.
[40] Casciola, CM., Piva, R., and Bassanini, P. 1996, Vorticity generation on aflat
surface in 3D flows, J. Comput. Phys. 129, 345-356.
Bibliography
303
[41] Chacon-Rebollo, T. and Hou, T.Y. 1990, A Lagrangian finite element method for
the 2-D Euler equations, Commun. Pure Appl. Math. 43, 735-767'.
[42] Chang, C.C. and Chern, R.L. 1991, A numerical study of flow around an
impulsively started cylinder by a deterministic vortex method, J. Fluid Mech.
233, 243-263.
[43] Cheer, A. 1989, Unsteady separated wake behind an impulsively started
cylinder flow, J. Fluid Mech. 201,485-505.
[44] Choquin, J.-P. 1987, Simulation numerique d'ecoulements tourbillonnaires de
fluides incompressibles par des methodes particulaires, These de l'Universite
Paris VI.
[45] Choquin, J.-P. and Cottet, G.-H. 1988, Sur Vanalyse d'une classe de methodes
de vortex tri-dimensionnelles, C. R. Acad. Sci. Paris 306, 739-42.
[46] Choquin, J.-P., Cottet, G.-H. and Mas-Gallic, S. 1988, On the validity of vortex
methods for nonsmooth flows, in Ref. 9, 56-67.
[47] Choquin, J.-P. and Lucquin-Desreux, B. 1988, Accuracy of a deterministic
particle method for the Navier-Stokes equations, Int. J. Num. Fluids 8,
1439_1458.
[48] Choquin, J.P. and Huberson, S. 1989, Particle simulation of viscous flow,
Comput. Fluids 17, 397-410.
[49] Chorin, A.J. 1973, Numerical study of slightly viscous flow, J. Fluid Mech. 57,
785-796.
[50] Chorin, A.J. 1978, Vortex sheet approximation of boundary layers, J. Comput.
Phys. 27, 428-442.
[51] Chorin, A.J. 1980, Vortex models and boundary layer instability, SIAM J. Sci.
Stat. Comput. 34, 1-21.
[52] Chorin, A.J. 1990, Hairpin removal in vortex interactions, J. Comput. Phys. 91,
1-21.
[53] Chorin, A.J. 1993, Hairpin removal in vortex interactions II, J. Comput. Phys.
107, 1-9.
[54] Chorin, A.J., Hugues, T.J., McCracken, M.F., and Marsden, J. 1978, Product
formulas and numerical algorithms, Commun. Pure Appl. Math. 31, 205-256.
[55] Christiansen, J.P. 1973, Numerical solution of hydrodynamics by the method of
point vortices, J. Comput. Phys. 13, 363-379.
[56] Cohen, A. and Perthamme, B. 1998, Optimal approximation of transport
equations by particle and pseudo particle methods, submitted.
[57] Collins, W.M. and Dennis, S.C.R. 1973, Flow past an impulsively started
circular cylinder, J. Fluid Mech. 60, 105-127
[58] Cottet, G.-H. 1982, Ph.D. thesis, Universite Paris 6, Paris.
[59] Cottet, G.-H. 1988, Vorticity boundary conditions and the deterministic vortex
method for the Navier-Stokes equation, in Ref. 39.
[60] Cottet, G.-H. 1988, A new approach for the analysis of vortex methods in 2 and
3 dimensions, Ann. Inst. Henri Poincare 5, 227-285.
[61] Cottet, G.-H. 1991, Particle-grid domain decomposition methods for the
Navier-Stokes equations in exterior domains, in Ref. 11, 100-118.
[62] Cottet, G.-H. 1991, Large time behavior of deterministic particle
approximations to the Navier-Stokes equations, Math. Comput. 56, 45-59.
[63] Cottet, G.-H. 1994, A vorticity creation algorithm for the Navier-Stokes
equations in arbitrary domain, in Navier-Stokes equations and related
non-linear problems, A. Sequeira (ed).
[64] Cottet, G.-H. 1996, Artificial viscosity models for vortex and particle methods,
J. Comput. Phys. 127, 299-308.
304
Bibliography
[65] Cottet, G.-H., Goodman, J., and Hou, T.Y. 1991, Convergence of the grid-free
point vortex method for the three-dimensional Euler equations, SIAM J. Num.
Anal. 28, 291-307.
[66] Cottet, G.-H. and Mas-Gallic, S. 1983, Une methode de decomposition pour une
equation de type convection-diffusion combinant resolution explicite et methode
particulaire, C. R. Acad. Sci. Paris 297, 133-136.
[67] Cottet, G.-H. and Mas-Gallic, S. 1987, A particle method to solve
transport-diffusion equations; Part II: the Navier-Stokes system, Internal
Report 158, Ecole Poly technique, Paris.
[68] Cottet, G.-H. and Mas-Gallic, S. 1990, A particle method to solve the
Navier-Stokes system, Num. Math. 57, 1-23.
[69] Couet, B., Buneman, O., and Leonard, A. 1981, Simulation of
three-dimensional flows with vortex-in-cell methods, J. Comput. Phys. 39, 305.
[70] Crighton, D.G. 1985, The Kutta condition in unsteady flow, Ann. Rev. Fluid
Mech. 17,411-445.
[71] Da Rios, L.S. 1906, Sul moto }un liquido indefinito con unfiletto vorticoso di
forma qualunque, Rend. Circ. Mat. Palermo, 22, 117-135.
[72] Daube, O. 1992, Resolution of the 2D Navier-Stokes equations in
velocity-vorticity form by means of an imfluence matrix technique, J. Comput.
Phys. 103, 402-414.
[73] Degond, P. and Mas-Gallic, S. 1989, The weighted particle method for
convection-diffusion equations, Math. Comput. 53, 485-526.
[74] Driscoll, C.F., and Fine, K. 1990, Experiments on vortex dynamics in pure
electron plasmas, Phys. Fluids B 6, 1359-1366.
[75] Dritschel, D.G. 1989, Contour dynamics and contour surgery: numerical
algorithms for extended, high-resolution modelling of vortex dynamics in two
dimensional, inviscid, incompressible flows, Comput. Phys. Rep. 1077-146.
[76] Dukowicz, J.K. and Kodis, J.W. 1987, Accurate conservative remapping
(rezoning) for arbitrary Lagrangian-Eulerian computations, SIAM J. Sci. Stat.
Comput. 8, 305-321.
[77] E, W. and Hou, T.Y. 1987, Convergence of the vortex method for oscillatory
vorticity field, CAM Report 10, Department of Mathematics, UCLA.
[78] E, W. and Liu J.G. 1996, Finite-difference schemes for incompressibleflowsin
vorticity formulation, in Vortex Flows and Related Numerical Methods II,
ESAIM Proc, 181-195, http://www.emath.fr/proc/Voll/.
[79] Ebiana, A.B. and Bartholomew, R.W. 1996, Design consideration for numerical
filters used in vortex-in-cell, Comput. Fluids 25, 61-75.
[80] Epton, M.A. and Dembart, B. 1995, Multipole translation theory for the
three-dimensional Laplace and Helmholtz equations, SIAM J. Sci. Stat. Comp.
16, 865-897.
[81] Falkner, V.M. 1953, The solution of lifting-plane problems by vortex lattice
theory, Aeronaut. Res. Counc. Rep. Mem. 25911-30.
[82] Feynman, R.P. 1957, Application of Quantum Mechanics to Liquid Helium,
Prog. Low temp. Phys. I, 16-53.
[83] Fishelov, D. 1990, A new vortex scheme for viscous flows, J. Comput. Phys. 86,
211-224.
[84] Fischer, P.F. 1997, An overlapping Schwarz method for spectral element
solution of the incompressible Navier-Stokes equations, J. Comput. Phys. 133,
84-101.
[85] Friedmann, A. 1964, Partial Differential Equations of Parabolic Type,
Prentice-Hall, Englewood Cliffs, NJ.
Bibliography
305
[86] Fritts, M.J., Crowley, W.P., and Trease, H.E., eds. 1985, The Free Lagrange
Method, Vol. 238 of Lecture Notes in Physics Series, Springer-Verlag, Berlin,
New York.
[87] Gagnon, Y., Cottet, G.-H., Dritschel, D., Ghoniem, A., and Meiburg, E.
eds. 1996, Vortexflowsand related numerical methods II, ESAIM Proc,
http://www. emath.fr/proc/Voll/.
[88] Gharakhani, A and Ghoniem, A. 1998, Simulation of the piston driven flow
inside a cylinder with an eccentric port, J. Fluids Eng. 120, 319-326.
[89] Greengard, C. 1985, The core spreading vortex method approximates the wrong
equation, J. Comput. Phys. 61, 345-348.
[90] Greengard, C. 1986, Convergence of the vortex filament method, Math. Comput.
47, 387-398.
[91] Greengard, L. 1988, On the efficient implementation of fast multipole
algorithms, Dept. of Computer Science Report 602, Yale University,
New Haven, CT.
[92] Greengard, L. and Rokhlin, V. 1987, A fast algorithm for particle simulation,
J. Comput. Phys. 73, 325-348.
[93] Greengard, L. and Strain, J. 1990, A fast algorithm for the evaluation of heat
potentials, Commun. Pure Appl. Math. XLIII, 949-963.
[94] Goodman, J. 1987, The convergence of random vortex methods, Commun. Pure
Appl. Math. 40, 189-220.
[95] Goodman, J., Hou, T.Y, and Lowengrub, J. 1990, Convergence of the point
vortex method for the 2-D Euler equations, Commun. Pure Appl. Math., 43,
415-430.
[96] Gray, A. and Mathews, G.B. 1952, A Treatise on Bessel Functions and Their
Applications to Physics, MacMillan, London.
[97] Guermond, J.L., Huberson, S., and Shen, W.S. 1993, Simulation of2D external
viscous flows by means of a domain decomposition method, J. Comput. Phys.
108, 343-352.
[98] Hald, O. 1979, Convergence of vortex methods II, SIAM J. Num. Anal. 16,
726-755.
[99] Hasimoto, H. and Kambe, T., eds. 1987, Fundamental Aspects of Vortex Motion,
IUTAM Proc, North-Holland, Amsterdam.
[100] Henshaw, W.D., Kreiss, H.-O., and Reyna, L.G. 1989, On the smallest scale for
the compressible Navier-Stokes equations, Theor. Comput. Fluid Dyn. 1, 65-95.
[101] Hess, J.L. 1975, Review of integral-equation techniques for solving potential
flow problems with emphasis on the surface-source method, Comput. Methods
Applied Mech. Eng. 5, 145-196.
[102] Hess, J.L. 1990, Panel methods in computational fluid dynamics, Ann. Rev.
Fluid Mech. 22, 255-274.
[103] Hockney, R.W. and Eastwood, J.W. 1981, Computer Simulation Using
Particles, McGraw-Hill, New York.
[104] Hoeijmakers, H.W.M. 1983, Computational Vortex Flow Aerodynamics,
AGARD Conf. Proc. 342-18, 1-35.
[105] Hornung, H. 1989, Vorticity generation and transport, in Proceedings of the
10th Australasian Fluid Mechanics Conference, University of Melbourne,
Australia.
[106] Hou, T.Y. 1990, Convergence of a variable blob vortex method for the Euler and
Navier-Stokes equations, SIAM J. Num. Anal. 27, 1387-1404.
[107] Hou, T.Y. 1991, Vortex methods with general variable blob shape function,
private communication.
306
Bibliography
[108] Hou, T.Y. and Lowengrub, J. 1990, Convergence of the point vortex method for
the 3-D Euler equations, Commun. Pure Appl. Math. 43, 965-981.
[109] Hou, T.Y., Lowengrub, J., and Krasny, R. 1991, Convergence of a point vortex
method for vortex sheets, SIAM J. Num. Anal. 28, 308-320.
[110] Hou, T.Y. and Wetton, B. 1992, Convergence of a finite difference scheme for
the Navier-Stokes equations using vorticity boundary conditions, SIAM J.
Num. Anal. 29, 615-639.
[111] Huberson, S., Jolles, A., and Shen, W. 1991, Numerical simulation of
incompressible viscous flows by means of particle methods, in Ref. 11,
369-384.
[112] Huberson, S. 1986, Modelisation asymptotique et numerique de noyaux
tourbillonaires enroules, These d'etat, Universite Pierre et Marie Curie.
[113] Katz, J. and Plotkin, A. 1991, Low-Speed Aerodynamics, McGraw-Hill,
New York.
[114] Katzenelson, J. 1989, Computational structure of the N-body problem, SIAM
J. Sci. Stat. Comput. 11, 787-815.
[115] Kinney, R.B. and Paolino, M.A. 1974, Flow transient near the leading edge
of a flat plate moving through a viscousfluid,ASME J. Appl. Mech. 41,
919-924.
[116] Kinney, R.B. and Cielak, Z.M. 1977, Analysis of unsteady viscousflowpast an
airfoil: Part I - theoretical development, AIAA J. 15, 1712-1717.
[117] Knio, O. and Ghoniem, A. 1990, Numerical study of three-dimensional vortex
methods, J. Comput. Phys. 86, 75-106.
[118] Knio, O. and Ghoniem, A. 1991, Three dimensional vortex simulation ofrollup
and entrainment in a shear layer, J. Comput. Phys. 97, 172-223.
[119] Knio, O. and Ghoniem, A. 1992, The 3-dimensional structure of periodic
vorticity layers under nonsymmetrical conditions, J. Fluid Mech. 242, 353-392.
[120] Knio, O. and Ghoniem, A. 1992, Vortex simulation of a 3-dimensional reacting
shear-layer with infinite-rate kinetics, AIAA J. 30, 105-116.
[121] Koumoutsakos, P. 1992, Simulation of unsteady separated flows using vortex
methods, Ph.D. dissertation, Caltech.
[122] Koumoutsakos, P. and Leonard, A. 1988, Improved boundary integral method
for inviscid boundary condition applications, AIAA J. 31, 401-404.
[123] Koumoutsakos, P. and Leonard, A. 1993, Direct numerical simulations using
vortex methods, in Ref. 22, 179-190.
[124] Koumoutsakos, P., Leonard, A., and Pepin, F. 1994, Viscous boundary
conditions for vortex methods, J. Comput. Phys. 113, 52-56.
[125] Koumoutsakos, P. and Leonard, A. 1995, High resolution simulations of the
flow around an impulsively started cylinder using vortex methods, J. Fluid
Mech. 296, 1-38.
[126] Koumoutsakos, P. and Shiels, D. 1996, Simulations of the viscousflownormal
to an impulsively started and uniformly acceleratedflatplate, J. Fluid Mech.
328, 177-226.
[127] Koumoutsakos, P. 1997, Inviscid axisymmetrization of an elliptical vortex,
J. Comput. Phys. 138, 821-857.
[128] Koumoutsakos, P. 1997, Active control of vortex-wall interactions, Phys. Fluids
9, 3808-3816.
[129] Krasny, R. 1986, Desingularization of periodic vortex sheet roll-up, J. Comput.
Phys. 65, 292-313.
[130] Krasny, R. 1986, A study of singularity formation in a vortex sheet by the point
vortex approximation, J. Fluid Mech. 167, 65-93.
Bibliography
307
[131] Krasny, R. 1991, Vortex sheet computations: roll-up, wake separation, in
Ref. 11,385-402.
[132] Lemine, M. 1997, Methodes de couplage particules-grille pour les ecoulements
incompressibles, Colloque national d'analyse numerique, Saint-Etienne.
[133] Lemine, M. 1998, Ph.D. thesis, Universite Joseph-Fourier, Grenoble, France.
[134] Leonard, A. 1975, Numerical simulation of interacting vortex filaments, in
Proceedings of the IV Intl. Conference on Numerical Methods of Fluid
Dynamics, Springer-Verlag, New York.
[135] Leonard, A. 1980, Vortex methods for flow simulation, J. Comput. Phys. 37,
289-335.
[136] Leonard, A. 1985, Computing three-dimensional incompressibleflowswith
vortex elements, Ann. Rev. Fluid Mech. 17, 523-559.
[137] Lifschitz, A., Suters, W.H., and Beale, J.T. 1996, The onset of instability in
exact vortex rings with swirl, J. Comput. Phys. 129, 8-29.
[138] Lighthill, MJ. 1963, Introduction. Boundary Layer Theory, J. Rosenhead, ed.
Oxford U. Press, New York, 54-61.
[139] Long, D.G. 1988, Convergence of the random vortex method in two dimensions,
J. Am. Math. Soc. 1, 779-804.
[140] Lugt, H.J. 1983, Vortex Flow in Nature and Technology, Wiley, New York.
[141] Lundgren, T.S. and Mansour, N.N. 1988, Oscillations of drops in zero gravity
with weak viscous effects, J. Fluid Mech. 194, 479-510.
[142] Majda, A. 1986, Vorticity and the mathematical theory of incompressible fluid
flow, Commun. Pure Appl. Math. 39, S179-S187.
[143] Marchioro, C. and Pulvirenti, M. 1994, Mathematical Theory of Incompressible
Nonviscous Fluids, Springer-Verlag, Berlin.
[144] Martensen, E. 1959, Berechnung der Druckverteilung an Gitterprofilen in
ebener Potentialstromung mit einer Fredholmschen Integralgleichung, Arch.
Ration. Mech. Anal. 3, 235-270.
[145] Martin, J.E. and Meiburg, E. 1991, Numerical investigation of
three-dimensional evolving jets subject to axisymmetric and azimuthal
perturbation, J. Fluid Mech. 230, 271-318.
[146] Martin, J.E. and Meiburg, E. 1992, Numerical investigation of
three-dimensionally evolving jets under helical perturbations, J. Fluid Mech.
243, 457-487.
[147] Mas-Gallic, S. 1987, Contribution a Vanalyse numerique des methodes
particulaires, These d'Etat, Universite Paris VI.
[148] Mas-Gallic, S. 1991, Deterministic particle method: diffusion and boundary
conditions, in Ref. 11, 433-465.
[149] Meiburg, E. and Lasheras, J.C. 1988, Experimental and numerical investigation
of the three-dimensional transition in plane wakes, J. Fluid Mech. 190, 1-37.
[150] Meiburg, E. 1989, Incorporation and test of diffusion and strain effects in the
two-dimensional vortex blob technique, J. Comput. Phys. 82, 85-93.
[151] Merriman, B. 1991, Particle approximation, in Ref. 11, 481-546.
[152] Mikhlin, S.G. 1964, Integral equations and their applications to certain
problems of mechanics, in Mathematical Physics and Engineering, 2nd ed.,
Macmillan, New York.
[153] Milizzano, F. and Saffman, P.G. 1977, The calculation of large Reynolds
Number two-dimensional flow using discrete vortices with random walk,
J. Comput. Phys. 23, 380-392.
[154] Monaghan, J.J. 1982, Why particle methods work, SIAM J. Sci. Stat. Comput.
3, 422.
308
Bibliography
[155] Monaghan, JJ. 1985, Particle methods for hydrodynamics, Comput. Phys. Rep.
3,71-124.
[156] Monaghan, JJ. 1985, Extrapolating B-splinesfor interpolation, J. Comput.
Phys. 60, 253-262.
[157] Najm, H. 1993, A hybrid vortex method with deterministic diffusion, in Ref. 22,
207-222.
[158] Nitsche, M. and Krasny, R. 1994, A numerical study of vortex ring formation at
the edge of a circular tube, J. Fluid. Mech. 276, 139-161.
[159] Orlandi, P. 1990, Vortex dipole rebound from a wall, Phys. Fluids A 1429,
75-110.
[160] Panton, R.L. 1994, Incompressible Flow, Wiley, New York.
[161] Pepin, F. and Leonard, A. 1990, Concurrent implementation of a fast vortex
method, in Proceedings of the Fifth Distributed Memory Computing
Conference I, pp. 453-462.
[162] Perlman, M. 1985, On the accuracy of vortex methods, J. Comput. Phys. 59,
200-223.
[163] Prager, W. 1928, Die Druckverteilung an Korpern in ebener Potentialstromung,
Phys. Z. 29, 865-869.
[164] Prandtl, W. 1904, Uber Flussigkeitbewegung bei sehr kleiner Reibung, in
Proceedings of the Fourth Mathematics Congress, Heidelberg, pp. 484-491.
[165] Prandtl, W. 1925, The Magnus effect and windpowered ships, Wissenschaften
13, 93-108.
[166] Puckett, E.G. 1989, A study of the vortex sheet method and its rate of
convergence, SIAM J. Sci. Stat. Comput. 10, 298-327.
[167] Pullin, D.I. 1992, Contour dynamics methods, Ann. Rev. Fluid Mech. 24,
89-115.
[168] Quartapelle, L. 1981, Vorticity conditioning in the computation of
two-dimensional viscous flows, J. Comput. Phys. 40, 453-477.
[169] Raviart, PA. 1983, An analysis of particle methods, in Numerical Methods in
Fluid Dynamics, Vol. 1127 of Lecture Notes in Mathematics Series,
Springer-Verlag, Berlin, 243-324.
[170] Raviart, P.A. 1987, Methodes particulars, Ecole d'ete CEA-INRIA-EDF,
unpublished lecture notes.
[171] Rehbach, C. 1978, Numerical calculation of three-dimensional unsteady flows
with vortex sheets, AIAA Paper 111-1978.
[172] Rosenhead, L. 1931, The Formation of vortices from a surface of discontinuity,
Proc. R. Soc. London Ser. A 134, 170.
[173] Rosenhead, L. 1932, The point vortex approximation of a vortex sheet, Proc. R.
Soc. London Ser. A 134, 170-192.
[174] Russo, G. 1991, A Lagrangian vortex method for the incompressible
Navier-Stokes equations, in Ref. 11, pp. 585-596.
[175] Russo, G. 1993, A deterministic vortex method for the Navier-Stokes equations,
J. Comput. Phys. 108, 84-94.
[176] Russo, G. and Strain, J.A. 1994, Fast triangulated vortex methods for the 2D
Euler equations, J. Comput. Phys. I l l , 291-323.
[177] Saffman, P.G. 1981, Dynamics of vorticity, J. Fluid Mech. 106, 49.
[178] Saffman, P.G. and Meiron, D.I. 1986, Difficulties with three-dimensional
weak solutions for inviscid incompressible flow, Phys. Fluids 29, 23732375.
[179] Saghbini, J.C. and Ghoniem, A. 1997, Numerical simulation of the dynamics
and mixing in a swirling flow, AIAA Paper 97-0507.
Bibliography
309
[180] Salmon, J.K. 1991, Parallel hierarchical N-body methods, Ph.D. dissertation,
Caltech.
[181] Salmon, J.K. and Warren, M. 1994, Skeletons from the treecode closet,
J. Comput. Phys. I l l , 136-155.
[182] Salmon, J.K., Warren, M.S., and Winckelmans, G. 1994, Fast parallel
tree codes for gravitational and fluid N-body problems, Int. J. Super. 8, 129—
142.
[183] Sarpkaya, T. 1989, Computational methods with vortices, J. Fluids Eng. 11,
15-52.
[184] Schoenberg, I.J. 1973, Cardinal Spline Interpolation, Society for Industrial and
Applied Mathematics, Philadelphia, PA.
[185] Sethian, J. and Ghoniem, A. 1984, Validation study of vortex methods,
J. Comput. Phys. 54, 425-456.
[186] Shankar, S. and van Dommelen, L. 1996, A new diffusion procedure for vortex
methods, J. Comput. Phys. 127, 88-109.
[187] Shiels, D. 1998, Simulation of controlled bluff body flow with a viscous vortex
method, Ph.D. dissertation, Caltech.
[188] Smith, P.A. and Stansby, P.K. 1988, Impulsively started flow around a circular
cylinder by the vortex method, J. Fluid Mech. 194, 45-77.
[189] Spalart, PR. and Leonard, A. 1981, Computation of separated flows by a
vortex-tracing algorithm, AIAA Paper 81-1246.
[190] Strain, J.A. 1996, 2D vortex methods and singular quadrature rules, J. Comput.
Phys. 124, 131-145.
[191] Strain, J.A. 1997, Fast adaptive 2D vortex methods, J. Comput. Phys. 132,
108-122.
[192] Ta Phuoc, L. and Bouard, R. 1985, Numerical solution of the early stage of the
unsteady viscous flow around a circular cylinder: a comparison with
experimental visualization and measurements, J. Fluid Mech. 160, 93-117.
[193] Temam, R. 1977, Navier-Stokes Equations, North-Holland, Amsterdam.
[194] Teng, ZJ. 1982, Elliptic vortex method for incompressibleflowat high Reynolds
number, J. Comput. Phys. 46, 54-68.
[195] Truesdell, C. 1954, The Kinematics ofVorticity, Indiana U. Press, Bloomington,
IN.
[196] van Dommelen, L. and Rundesteiner, E.A. 1989, Fast, adaptive summation of
point forces in the two-dimensional Poisson equation, J. Comput. Phys. 83,
126-148.
[197] Winckelmans, G. and Leonard, A. 1988, Weak solutions of the
three-dimensional vorticity equation with vortex singularities, Phys. Fluids 31,
1838-1839.
[198] Winckelmans, G. 1989, Topics in vortex methods for the computation of
three- and two-dimensional incompressible unsteady flows, Ph.D. dissertation,
Caltech.
[199] Winckelmans, G. and Leonard, A. 1989, Improved vortex methods for
three-dimensional flows, in Ref. 39, 25-35.
[200] Winckelmans, G. and Leonard, A. 1993, Contributions to vortex particle
methods for the computation of three dimensional incompressible unsteady
flows, J. Comput. Phys. 109, 247-273.
[201] Winckelmans, G.S., Salmon, J.K., Warren, M.S., Leonard, A., and Jodoin, B.
1995, Application of fast parallel and sequential tree codes to computing
three-dimensional flows with the vortex element and boundary elements method,
in Ref. 87, 225-240.
310
Bibliography
[202] Wu, J.C. 1976, Numerical boundary conditions for viscous flow problems,
AIAAJ. 14, 1042-1049.
[203] Ying, L.A. 1991, Convergence of vortex methods for initial boundary value
problems, Adv. Math. 20, 86-102.
[204] Zabusky, N.J., Hughes, M.H., and Roberts, K.V. 1979, Contour dynamics for
the Euler equations in two-dimensions, J. Comput. Phys. 30, 96-106.
[205] Zhu, J. 1989, An adaptive vortex method for two-dimensional viscous and
incompressible flows, Ph.D. dissertation, New York University.
Index
advection equation, 261, 267
weak solution of, 62, 82, 261, 267, 269,
275, 277
aliasing effect, 211,225-227
antidiffusion, 168
B-splines, 227-229
baroclinic, 9
Beale's iterative technique, 86, 208-211, 242
Birkoff-Rott equations, 13
blob
variable
for diffusion scheme, 152-154, 235
for velocity calculation, 21, 49-50, 235
vortex, 10,21, 173, 183
near boundaries, 114-117, 252
boundary condition
far-field, 18, 19,238,251,256
interface, for domain-decomposition method,
252, 255, 259, 260
kinematic, 93
no-slip, 172, 174,236,251
no-through-flow, 31-32, 244
periodic, 13, 27, 32-33
pressure, 177
in three dimensions, 200-205
vorticity, 179-181
vorticity flux, 189,201
boundary elements, 192
boundary layer, 185, 202, 256
Calderon theorem, 248, 279
Courant-Friedricks-Levy condition,
43,251
conformal mapping, 94
conservation
of mass, 5
of momentum, 5-6
conservation properties
in three dimensions, 59-61, 65-68
in two dimensions, 18, 53
contour dynamics method, 70, 84
convection-diffusion equation, 125, 154
convergence analysis
for particle strength exchange, 148-152
for random-walk, 133-136
for viscous splitting, 127-130
in three dimensions, 75-84
in two dimensions, 34-50
coordinate mapping
for boundary conditions, 187
for particle-grid operators, 240, 241
for variable-blob method, 153, 259
core-spreading method, 70, 74, 165-167
cutoff function, 10, 20-27, 33, 58
cylinder
impulsively started, 137, 195-198,
256-258
wake, 157
Delaunay triangulation, 213
diffusion equation, 125, 142, 192
distribution representation lemma, 276
domain-decomposition method, 237-238,
251-260
ellipse calculation, 29-31, 231-235
energy, 18, 51, 53, 54, 65-68, 181, 283
enstrophy, 148-149, 161, 168, 191, 282
Eulerian description, 3, 5
fast solver, 212, 214-218, 284-299
filament surgery, 64, 70, 164
filtering, 167, 168
finite-difference
methods, 18, 21, 237, 248-256, 260
311
312
Index
finite-difference (contd.)
schemes
for boundary conditions, 187
for Laplacian on irregular mesh, 160
for stretching computation in threedimensional schemes, 69, 82
Fourier analysis
for cutoff construction, 23-24
for deconvolution scheme, 210-211, 243
for interpolation scheme, 222-226
Fredholm
alternative, 102
integral equation, 101
material
derivative, 3
element, 2, 10, 19
line, 9, 12
measure solution, see advection equation, weak
solution
moment conditions
for cutoff functions, 22, 37
for diffusion, 147, 163
for regridding scheme, 45, 221, 222,
224, 229
Monte Carlo method, see random choice
multipole expansions, 114, 286-288
Gauss quadrature points, 27, 264
Green's function, see kernel
N-body problem, 114, 284
Navier-Stokes equation, 124
Neumann boundary condition
for diffusion, 189-194
for pressure, 260
numerical dissipation, 17, 18, 53, 237
hairpin, 164-165, 168
Hamiltonian system, 18, 52
Helmholtz decomposition, 85, 90-92
Helmholtz laws, 7
Images
method of, 94, 117
impulse
angular, 51, 53, 206
linear, 22, 51, 206, 222, 230
initialization, see particle initialization
interpolation technique
for filament method, 68, 69, 73
for particle-grid matching, 238-241, 255,
259
area-weighting formula, 239
triangular-shaped cloud formula, 240
for regridding scheme, 219, 222-230
Kelvin's theorem, 9-11, 19, 56, 61, 62, 105,
181,182
Kelvin-Helmholtz instability, 14, 71
kernel
construction of mollified, 14, 22, 25-27, 57,
58
for Biot-Savart law, 13, 32, 33, 56
for diffusion equation, 128, 130-132, 142,
143
for particle strength exchange scheme,
145-148
for Poincare identity, 95
Kutta condition, 91, 102, 106-107, 109
Lagrangian
description, 2
element, 10, 22
formulation, 19
Laplace's equation, 93-94
Large eddy simulations, 123, 164, 168
Lighthill's algorithm, 181
overlapping
condition, 10, 34, 36, 39, 45-47, 65, 84, 86,
206,207,211,236,248
subdomains, in domain-decomposition
method, 252, 255, 256
panel methods, 109-114
particle, 10, 18,20,21
approximation of function by, 261-264,
271-275
distortion, 206-207
initialization, 21, 26-30, 44, 262
solution to advection equation, 273
particle strength exchange scheme, 145-148,
197, 204, 207, 210, 245, 254, 255, 259
with variable blob size, 153
Poincare identity, 91, 95, 99, 100
proof of, 280-282
Poisson
equation, 12, 13,57,98
solver, 244
summation formula, 223, 263
Prandtl equation, see boundary layer
pressure, 6, 19, 259, 260
quadrature
adaptive, 217-219
quadrature formula
for midpoint rule, 14, 27, 29, 35, 48, 68, 82,
83, 263-264
for random choice, 28, 131, 134, 135,
264-266
random choice
for particle initialization, 27-30, 207,
264-267
Index
random choice (contd.)
for particle resampling, 47, 145
random walk, 130-141, 186, 202, 265
regridding scheme, 29, 45, 208, 221-237,
254-256
for interface condition in domaindecomposition method, 254
for three-dimensional calculation, 55,70,71,
87,89
regularization error, 35, 43, 79, 114
resampling, 141-145
Reynold's transport theorem, 4
Schwarz algorithm, 253, 259, 260
shear flows, 28, 29, 49, 54
shear layer, 70-72, 219
shedding, 157
Sobolev
inequality, 264
space, 262
spectral methods, 21, 197, 237, 245-246
stability
estimates for advection equation, 261, 269,
275
for particle strength exchange, 143
for particle-grid assignment, 241, 242
for viscous vortex-in-cell method, 249,
251
strain, 206, 207, 219, 231,236
streamfunction, 96, 98
stretching, 55-59, 64, 69, 81, 244
subgrid model, 55, 64, 164, 167
313
time discretization
forward Euler scheme, 43, 148
numerical analysis, 43
Runge-Kutta scheme, 21, 53
transport equation, see advection equation
tree data structure, 294-296
triangulated vortex method, 116, 159, 208,
211-216
velocity-pressure formulation
in domain-decomposition method, 237, 238,
251,252
viscous splitting, 124, 127, 181
Voronoi mesh, 160, 213, 214
vortex
blobs, see blob
dipole, 197, 199,200
patch, 209, 215, 216-219, 231-235
ring, 61, 72, 73, 86, 165, 201-205
shedding, 107-110
sheet, 10-18, 97-98, 173, 174, 183, 184,
282,283
tube, 7, 61,64
vortex-in-cell methods, 116, 204, 222, 237,
244-251
vorticity
boundary conditions, 178
definition, 1
divergence, 1,84-89,202
flux, 175-177, 189,205
wake, 64, 256
weak solutions, 12, 20, 35, 261, 275