Módulo 2 - Material Complementar
Boas-vindas!
Prezado(a) Aluno(a):
Durante o estudo sobre os fundamentos das comunicações via satélite senti
uma necessidade de compreender como o satélite é controlado em sua
órbita e, além disso, como podemos estudar um plano orbital. Já imaginava
encontrar alguma matemática por trás dessas perguntas e por isso, desenvolvi
o Capítulo 1 – Satélite e Órbitas desde Material Complementar com explicações
conceituais sobre o posicionamento orbital, as leis que governam o movimento
de um satélite, os conhecidos ângulos de Azimute e Elevação entre outros
pontos interessantes. Já posso adiantar para o leitor que não serão cobradas
avaliações neste módulo sobre este material complementar, ou seja, trata-se
de informações que agregam ainda mais aos nossos estudos sobre a tal falada
mecânica celeste.
O Capítulo 2 possui o objetivo de estudar uma arquitetura de comunicação para
os satélites por meio da compreensão das funções do segmento espacial, do
segmento terreno e do segmento de controle. Um enfoque é dado nos estudos
do segmento espacial na tentativa de “diagramar” o funcionamento dos
satélites. Repare que: ainda não iremos mergulhar em planos de canalização e
bandas de frequências (L – C – Ka – Ku entre outras). Estamos interessados em
compreender (em um primeiro momento) conceitualmente o funcionamento de
um satélite baseando-se na teoria da engenharia de telecomunicações.
Bons estudos!
Lista de Ilustrações
Figura 1 - Forças atuantes em um sistema de satélite com orbita circular........................................................................7
Figura 2 - Aplicação das Leis de Newton e determinação da velocidade do satélite em órbita circular..........................9
Figura 3 - Aplicação da primeira Lei de Kepler para órbitas elípticas em sistemas de satélites.....................................11
Figura 4 - Órbita elíptica de um satélite e seus parâmetros geométricos........................................................................13
Figura 5 - Aplicação da segunda Lei de Kepler ao movimento orbital de satélites. .......................................................14
Figura 6 - Aplicação da segunda Lei de Kepler por intermédio do momento angular do satélite. .................................15
Figura 7 - Conceitos sobre o período de dia solar e o período de dia sideral. ..............................................................18
Figura 8 - Orientações dos planos orbitais. .....................................................................................................................19
Figura 9 - Conceitos sobre excentricidade da órbita elíptica. .........................................................................................20
Figura 10 - Tipos de planos orbitais – LEO – MEO – GEO................................................................................................21
Figura 11 - Cálculos para determinação da altura de um satélite geoestacionário. .......................................................23
Figura 12 - Conceitos sobre o sub-ponto de um satélite. ...............................................................................................24
Figura 13 - Definição dos planos para determinação do Ângulo de Azimute. ................................................................25
Figura 14 - Determinação do ângulo de Azimute em função da posição relativa entre a estação terrena e o subponto
do satélite..........................................................................................................................................................................26
Figura 15 - Conceitos referentes ao sistema de coordenadas de longitude e latitude. ..................................................27
Figura 16 - Esquema geométrico para determinação do ângulo de azimute. ................................................................28
Figura 17 - Definição dos planos para determinação do Ângulo de Elevação. ..............................................................29
Figura 18 - Ilustração para entendimento dos conceitos do ângulo de elevação. .........................................................30
Figura 19 - Ilustração do software Google Earth para determinação da posição relativa entre a estação terrena e o
subponto do satélite. ........................................................................................................................................................31
Figura 20 - Conceitos sobre a declinação magnética da Terra........................................................................................33
Figura 21 - Carta de Declinação Magnética do Observatório Nacional [2].....................................................................34
Figura 22 - Exemplo de cálculo da declinação magnética para a cidade de Campinas ................................................36
Figura 23 - Conceito da distância inclinada e área de cobertura.....................................................................................38
Figura 24 - Exemplo de cálculo da distância inclinada na comunicação entre duas estações terrenas. ......................41
Figura 25 - Arquitetura do sistema de comunicação via satélite......................................................................................46
Figura 26 - Tipos de estações terrenas em um sistema de comunicação via satélite.....................................................47
Figura 27 - Parâmetros relacionados ao desempenho no sistema de comunicação via satélite....................................48
Figura 28 - Relações entre os parâmetros técnicos de planejamento e o provimento de serviços em sistema de satélite... 50
Figura 29 - Subsistemas do segmento espacial ..............................................................................................................51
Figura 30 - Conceitos relacionados ao lançamento de satélites e órbitas de transferência. ..........................................54
Figura 31 - Conceitos sobre o fenômeno – efeito fotovoltaico. .......................................................................................57
Figura 32 - Vantagens e desvantagens dos satélites: Três Eixos e Spin. ........................................................................59
Figura 33 - Diagrama da arquitetura do subsistema de rastreamento, telemetria e comando. ......................................61
Figura 34 - Conceitos sobre o sistema local de coordenadas para controle de altitude de satélites GEO. ..................64
Figura 35 - Diagrama em blocos conceitual do subsistema de controle de altitude.......................................................65
Figura 36 - Diagrama em blocos conceitual de um sistema de comunicação via satélite. ............................................67
Figura 37 - Diagrama em blocos conceitual do sistema payload Bent Pipe de um satélite comunicação. ...................69
Figura 38 - Esquemas de conversão (direta ou dupla) para Downconverter dos sinais de Uplink. ...............................71
Figura 39 - Diagrama simplificado de funcionamento do TWTA. .....................................................................................72
Figura 40 - Diagrama simplificado de funcionamento dos amplificadores SSPAs. .........................................................74
Figura 41 - Diagrama simplificado de funcionamento de um transponder regenerativo.................................................76
Figura 42 - Diagrama de um sistema de comunicação digital via satélite.......................................................................78
Figura 43 - Diagrama em blocos de um sistema de comunicação digital.......................................................................80
Figura 44 - Conceitos sobre o desempenho e o processo de recepção de sinais em sistemas de comunicações.....82
Lista de Siglas e Abreviações
ADC - Analog-to-Digital Converter
AWGN - Additive White Gaussian Noise
BER - Bit Error Rate
DAC - Digital-to-Analog Converter
DTH - Direct-to-Home
DVB-S/S2 - Digital Video Broadcast - Satellite
EIRP - Effective Isotropic Radiated Power
GEO - Geostacionary Earth Orbit
GSO - Geosynchronous Earth Orbit
HPA - High Power Amplifiers
IF - Intermediate Frequency
IMUX - Input Multiplexer
LEO - Low Earth Orbit
LNA - Low Noise Amplifier
LTE - Long Term Evolution
MCC - Master Control Center
MEO - Medium Earth Orbit
OMUX - Output Multiplexer
SNR - Signal-to-Noise Ratio
SSPA - Solid State Power Amplifier
TTC - Tracking, Telemetry and Command
TWT - Travelling Wave Tube
TWTA - Travelling Wave Tube Amplifiers
VSAT - Very Small Aperture Terminal
Sumário
Capítulo 1 - Satélites – Órbitas......................................................................................................................... 6
1.1. Lei da Gravitação de Newton........................................................................................................ 8
1.2. Segunda Lei de Newton aplicada ao Movimento ........................................................................ 9
1.3. Leis de Kepler.............................................................................................................................. 10
1.3.1. Primeira Lei de Kepler.................................................................................................. 10
1.3.2. Segunda Lei de Kepler................................................................................................. 14
1.3.3. Terceira Lei de Kepler................................................................................................... 16
1.4. Plano Orbital de um Satélite........................................................................................................ 18
1.4.1. Orientação do Plano Orbital ........................................................................................ 19
1.4.2. Excentricidade do Plano Orbital.................................................................................. 20
1.4.3. Distância em relação à Terra........................................................................................ 21
1.4.3.1. Ângulos de Visada do Sistema de Satélite .................................................. 24
1.4.3.1.1. Ângulo de Azimute......................................................................... 25
1.4.3.1.2. Ângulo de Elevação ...................................................................... 29
1.4.3.1.3. Exemplo – Azimute e Elevação..................................................... 31
1.4.3.1.4. Declinação Magnética................................................................... 33
1.4.3.2. Cálculo da Distância Inclinada do Satélite (Slant Range)............................ 38
1.4.3.2.1. Exemplo – Cálculo da Distância Inclinada.................................... 41
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite........................................................... 45
2.1. Fundamentos dos Sistemas de Comunicações Digitais via Satélite......................................... 48
2.2. Segmento Espacial – Funções e Subsistemas do Satélite........................................................ 51
2.2.1. Sistema Plataforma do Satélite.................................................................................... 52
2.2.1.1. Subsistema de Hardware – Infraestrutura Mecânica................................... 52
2.2.1.2. Subsistema de Propulsão ............................................................................ 53
2.2.1.3. Subsistema de Controle de Temperatura..................................................... 55
2.2.1.4. Subsistema de Energia – Alimentação......................................................... 56
2.2.1.4.1. Exemplo – Subsistema de Energia Solar...................................... 58
2.2.1.5. Subsistema de Rastreamento, Telemetria e Comando (Monitoramento).... 61
2.2.1.6. Subsistema de Controle de Órbita e Altitude............................................... 63
2.2.1.6.1. Sensores para Controle de Altitude.............................................. 66
2.2.2. Sistema Payload do Satélite ....................................................................................... 67
2.2.2.1. Sistema – Transponder Transparente Bent Pipe.......................................... 69
2.2.2.1.1. Subsistema de Amplificação dos Satélites de Comunicação...... 72
2.2.2.2. Sistema – Transponder Regenerativo........................................................... 75
2.2.2.3. Técnicas de Comunicações Digitais em Sistemas de Satélite.................... 77
2.2.2.3.1. Fundamentos da Transmissão Digital........................................... 77
Quiz 1.............................................................................................................................................................. 84
Quiz 2.............................................................................................................................................................. 85
Referências Bibliográficas.............................................................................................................................. 87
Capítulo 1 - Satélites – Órbitas
As localizações orbitais de um dispositivo espacial em sistemas de comunicações via satélite influenciam significativamente na determinação de
sua cobertura e nas características operacionais
dos serviços que estão ativos.
Não é o objetivo deste capítulo do módulo
retratar de forma aprofundada a mecânica orbital dos satélites dado a complexidade de dedução e análise da física aplicada ao movimento de
corpos celestes. Ainda assim, é muito importante
mencionar que o entendimento da dinâmica orbital provê informações valiosas para análise de
questões que relacionam os tipos de órbitas de
satélite com determinadas aplicações, suas implicações nas comunicações, além de conceitos
relacionados à estabilidade orbital, requisitos de
lançamento e a própria operacionalização do
sistema de satélite. Assim, esta seção descreve
as características gerais das órbitas de satélites
Anotações
evidenciando quais são as principais órbitas utilizadas para as comunicações via satélite.
Enquanto uma trajetória descreve um caminho traçado por um corpo em movimento, uma
órbita é uma trajetória que é periódica. Um satélite artificial que se move em torno do planeta
Terra retrata um movimento orbital enquanto um
veículo de lançamento descreve uma trajetória
de lançamento. Esse conceito é importante uma
vez que o estabelecimento da órbita final de um
satélite pode ocorrer em um plano de trajetórias
com órbitas de transferência, por exemplo. Neste
sentido, embora sejam conceitualmente distintos,
os termos trajetória e órbita possuem um relacionamento estreito na análise da mecânica orbital
de satélites. Em um primeiro momento, pode-se
mencionar que o movimento dos satélites artificiais e naturais em torno do planeta Terra é governado por duas forças. Uma delas é de natureza
Capítulo 1 - Satélites – Órbitas
7
centrípeta a qual é direcionada para o centro do
planeta Terra devido à força gravitacional de atração de nosso planeta Terra enquanto a outra é a
força centrífuga a qual atua na direção contrária
ao centro da Terra conforme mostra a Figura 1.
Figura 1 - Forças atuantes em um sistema de satélite com orbita circular.
No contexto orbital, é importante notar que
a força centrífuga é a força exercida durante o
movimento circular pelo corpo-objeto que se movimenta em torno do corpo-objeto que é orbitado.
No caso do sistema Terra-Satélite, o satélite é o
corpo que exerce a força centrífuga. No entanto,
é a força centrípeta a responsável pelo movimento circular. Na ausência da força centrípeta, o satélite continuaria se movendo em linha reta com
determinada velocidade após a injeção orbital. A
Anotações
força centrípeta, atuando com uma determinada
angulação perpendicular à direção de velocidade do satélite em relação ao centro da Terra, faz
com que o movimento retilíneo se transforme em
um movimento circular ou elíptico dependendo
da velocidade do satélite. A partir da força centrípeta tem-se a aceleração centrípeta a qual pode,
de fato, mudar a direção do vetor de velocidade
do satélite. Com isso, a força centrífuga é compreendida como uma força exercida pelo satélite
8
Capítulo 1 - Satélites – Órbitas
com direção contrária, ou seja, se opondo e promovendo uma reação à força centrípeta (3ª Lei
de Newton – Para cada ação tem-se outra ação
equivalente e contrária reação). Isso significa que
existe uma aceleração centrífuga no sentido contrário ao centro da Terra devido à existência da
aceleração centrípeta. Logo, a única força radial
que atua sobre os satélites que orbitam a Terra
é a força centrípeta. A força centrífuga não atua
sobre o satélite, pelo contrário, é uma força de
reação exercida pelo próprio satélite.
1.1. Lei da Gravitação de Newton
Essas duas forças podem ser explicadas de forma mais detalhada com o auxílio das leis da gravitação universal de Newton e especificamente, da
segunda de Newton para o movimento. De fato,
as mesmas leis físicas que governam o movimento dos planetas em torno do sol são aplicadas e
governam o movimento dos satélites naturais e
artificiais em torno da Terra. A formulação da conhecida Lei da Gravitação de Newton remete ao
seguinte pensamento-lei:
• Cada partícula atrai outras partículas
com uma dada força gravitacional cuja
magnitude é diretamente proporcional
ao produto das respectivas massas das
partículas e inversamente proporcional
ao quadrado da distância que as separam (equação 1.1):
G × m1 × m2
r2
m1 e m2 → massas de duas partículas
F=
(1.1)
G → constante gravitacional, G =
6.67 × 10−11 m3 kg s 2
A força com a qual uma partícula de massa m1 atrai outra partícula de massa m2 é equivalente à força que a partícula m2 exerce sobre
a partícula m1. A magnitude das forças é igual,
mas opostas em termos de direção. Já a aceleração experimentada por cada partícula dependerá
das suas respectivas massas. Conceitualmente, a
aceleração de um corpo é uma medida da força
empregada por unidade de massa. Isso significa
que quanto maior é a massa de um corpo alvo
Anotações
de uma determinada força, menor será a aceleração experimentada pelo corpo. No sistema TerraSatélite o planeta Terra possui massa muito maior
e, portanto, praticamente não é acelerado pela
força que o satélite exerce (pois o satélite tem
massa muito menor). Já a aceleração resultante
da força atuante no satélite em função da força
gravitacional exercida pela Terra tem influência no
movimento orbital do próprio satélite dada a sua
massa muitas vezes menor.
Capítulo 1 - Satélites – Órbitas
9
1.2. Segunda Lei de Newton aplicada ao Movimento
A lei que relaciona a massa de um corpo com a
força e a aceleração é justamente a segunda lei
de Newton aplicada ao movimento. Um satélite
em órbita com uma velocidade orbital v experimentará uma aceleração centrípeta proporcional
à v2/r, em que r é a distância do satélite ao centro da Terra. Considerando uma massa m para
o satélite, uma força de reação centrífuga exercida pelo satélite igual à mv2/r será equivalente
à força gravitacional exercida sobre o satélite.
A Figura 2 mostra a aplicação da 2ª e da 3ª lei
de Newton evidenciando as forças que existem
no movimento orbital circular de um satélite em
torno da Terra. Igualando a força gravitacional
exercida pela Terra sobre o satélite em direção ao
centro do planeta com a força centrífuga em função da velocidade do satélite é possível determinar a velocidade orbital do satélite a qual é dada
em função da constante gravitacional geocêntrica
μ=3.986013x105 km3/s2.
Figura 2 - Aplicação das Leis de Newton e determinação da velocidade do satélite em órbita circular.
Anotações
10
Capítulo 1 - Satélites – Órbitas
Com a determinação da velocidade orbital
do satélite v é possível calcular o tempo orbital
T que o satélite leva para completar a trajetória
circular, dada pela seguinte equação:
2 × π × r 2 × π × r 3/ 2
=
T =
µ
µ
(1.2)
r
1.3. Leis de Kepler
Neste momento, é interessante compreender os
fundamentos de pesquisa que Newton utilizou
como pilar de estudos para formular e desenvolver seus notáveis trabalhos na temática do
movimento dos corpos do sistema solar. Johannes Kepler, astrônomo e matemático alemão é
o autor das três leis que governam a mecânica
celeste denominadas Leis de Kepler as quais foram utilizadas e refinadas por Newton (em meados de 1665) em seus trabalhos com as leis do
1.3.1. Primeira Lei de Kepler
A primeira Lei de Kepler estabelece que a órbita
de um satélite em torno da Terra é elíptica com o
centro de massa da Terra sendo um dos pontos
focais da elipse. A Figura 3 descreve a órbita elíptica de um satélite evidenciando o centro de massa
do planeta Terra em dos pontos de foco da elipse. Uma órbita elíptica é caracterizada por um semieixo maior (a) e por uma excentricidade elíptica
a qual é definida como a razão entre a distância
compreendida entre centro da elipse e o centro da
Terra (ponto focal) e o semieixo maior da elipse (a).
Anotações
movimento e gravitação universal. As Leis de Kepler acerca do movimento planetário podem ser
aplicadas a quaisquer dois corpos no espaço que
interagem por intermédio da gravitação. A explicação das três Leis de Kepler auxilia na compreensão mais detalhada do movimento orbital dos
satélites em torno da Terra abrindo o horizonte de
análise para posteriores conclusões dos sistemas
de comunicações via satélite.
Capítulo 1 - Satélites – Órbitas
11
Figura 3 - Aplicação da primeira Lei de Kepler
para órbitas elípticas em sistemas de satélites.
Assim, uma órbita circular pode ser interpretada como um caso particular da órbita elíptica
com excentricidade igual a zero, ou seja, os pontos focais se convergem em um único ponto central tornando a elipse um círculo. Na modelagem
matemática dos movimentos elípticos é possível
calcular a velocidade de um satélite utilizando
o princípio da conservação de energia que vale
para todos os pontos espaciais da órbita elíptica.
O princípio da conservação da energia estabelece
que a energia não pode ser criada, nem destruída
e sim transformada de uma forma para outra. Na
análise do movimento orbital de satélites, os fundamentos da conservação de energia podem ser
Anotações
aplicados à luz dos conceitos das energias dos
tipos cinética e potencial em um satélite. Assim, o
princípio da conservação de energia estabelece
que a soma das energias de movimento (cinética)
e potencial do satélite resulta em uma constante.
O valor dessa constante B em uma órbita elíptica
depende da interação entre a Terra e o satélite
e, portanto, de suas massas em conjunto com o
semieixo maior da órbita elíptica.
B= −
G × m1 × m2
2a
(1.3)
12
Capítulo 1 - Satélites – Órbitas
De forma específica, a energia cinética de
um satélite em movimento é dependente da velocidade orbital v e da massa do satélite m2 enquanto
a energia potencial a uma dada distância r é dependente da interação gravitacional entre a Terra e
o satélite de acordo com as seguintes equações:
Energia Cinética (Sat) =
Energia Potencial (Sat) = −
1
m2 v
2
G × m1 × m2
r
(1.4)
(1.5)
Com o objetivo de determinar a velocidade
de um satélite em órbita elíptica pode-se somar
as energias cinética e potencial igualando-as à
constante B da equação (1.3), resultando no seguinte desenvolvimento matemático:
G × m1 × m2
G × m1 × m2
1
m2 v 2 −
=
−
r
2
2a
2 1
v2 =
G × m1 −
r a
=
v
Anotações
2
1
µ −
r a
(1.6)
Capítulo 1 - Satélites – Órbitas
Observando a equação (1.6), percebe-se
que é possível determinar a velocidade orbital de
um satélite a uma dada distância em função da
constante gravitacional e do semieixo maior da
elipse orbital. A Figura 4 mostra um satélite em
órbita elíptica em conjunto com os parâmetros
geométricos necessários para determinação da
velocidade e que definem a orbita do satélite em
torno da Terra. Um dos parâmetros mais importantes seriam os pontos de apogeu e perigeu do
sistema orbital. O ponto espacial da órbita elíptica
no qual o satélite fica mais distante da Terra é denominado de apogeu enquanto o ponto espacial
no qual o satélite fica mais próximo do centro da
Terra é denominado de perigeu.
Figura 4 - Órbita elíptica de um satélite e seus parâmetros geométricos.
Anotações
13
14
Capítulo 1 - Satélites – Órbitas
1.3.2. Segunda Lei de Kepler
A linha que interliga o centro da Terra com o satélite retrata o raio orbital do satélite e é utilizada
para verificar que o próprio satélite ilumina áreas
equivalentes no plano orbital em equivalentes intervalos de tempo. A Figura 5 mostra as diferentes áreas iluminadas por um satélite em diferentes pontos espaciais da órbita elíptica. A segunda
Lei de Kepler estabelece que, considerando o
mesmo de tempo na trajetória do satélite, estas
áreas são iguais.
Figura 5 - Aplicação da segunda Lei de Kepler ao movimento orbital de satélites.
Anotações
Capítulo 1 - Satélites – Órbitas
Assim, em uma posição orbital perto do perigeu, dentro de um tempo de trajetória de 1 hora,
o satélite orbitando a uma dada velocidade cobre
uma área 1. Pela segunda Lei de Kepler, em uma
posição orbital perto do apogeu, dentro do mesmo tempo de trajetória de 1 hora, o satélite irá cobrir uma área 2 a qual é igual à área 1. Este resultado mostra que a velocidade orbital do satélite
não é constante. De fato, o satélite se move mais
rápido (maior velocidade) conforme se aproxima
da Terra enquanto sua velocidade decresce nos
pontos mais distantes do centro da Terra. A prova
para essa análise reside na modelagem do vetor
velocidade do próprio satélite a luz da segunda
Lei de Kepler. Especificamente, a segunda Lei de
Kepler é explicada por intermédio do conceito físico da conservação do momento angular do satélite o qual é determinado pelo produto entre a
massa do satélite, a sua velocidade angular e o
vetor raio. A Figura 6 mostra as equações que
descrevem a conservação do momento do satélite em função da componente de velocidade (v’)
perpendicular ao raio orbital.
Figura 6 - Aplicação da segunda Lei de Kepler por intermédio do momento angular do satélite.
Anotações
15
16
Capítulo 1 - Satélites – Órbitas
Essa componente de velocidade é obtida
pelo produto entre a velocidade do satélite v e o
ângulo entre a direção de movimento do satélite e o plano perpendicular ao raio orbital. Assim,
pela segunda Lei de Kepler, o momento angular
rvcos(α) é constante e, portanto, encontra-se uma
relação inversamente proporcional entre a velocidade perpendicular orbital e a distância r do
satélite. Isso significa que em pontos espaciais
pertos da Terra, indo para o perigeu (r pequeno),
a velocidade perpendicular orbital é maior (mantendo o momento angular constante). Em contrapartida, para pontos espaciais distantes da Terra,
(apogeu, r grande), a velocidade perpendicular
orbital é menor (equilibrando o momento angular). Em outras palavras, para qualquer satélite
em órbita elíptica, o produto interno entre o vetor
de velocidade e o vetor de raio orbital é constante
para todos os pontos espaciais da órbita elíptica.
1.3.3. Terceira Lei de Kepler
A terceira Lei de Kepler, também conhecida como
lei dos períodos, estabelece que o quadrado do
período do tempo orbital de um corpo (satélite)
é proporcional ao cubo da distância média entre
dois corpos no espaço. Especificamente para o
caso da órbita elíptica, o quadrado do período do
tempo orbital é calculado em função do cubo (terceira potência) do semieixo maior da órbita elíptica. Ainda assim, a dedução matemática para o
tempo orbital pode ser conduzida considerando
uma órbita circular (caso particular da órbita elíptica) com raio orbital r, de acordo com:
G × m1 × m2 m2 × v 2
=
r
r2
v = w × r → Velocidade → Velocidade Angular
G × m1 × m2 m2 × ( w × r )
=
= m2 × w2 × r
2
r
r
2
Isolando o termo da velocidade angular na
equação (1.7) e considerando a relação entre o
período T e a velocidade angular, segue o seguinte desenvolvimento:
Anotações
(1.7)
Capítulo 1 - Satélites – Órbitas
G × m1 × m2 m2 × ( w × r )
=
= m2 × w2 × r
2
r
r
G × m1
2π
2
→
=
w=
w
T
r3
17
2
(1.8)
4π 2 3
T =
r
G
m
×
1
2
Com isso, é possível estabelecer uma relação entre o período orbital T e o raio orbital r para
uma órbita circular. A relação do período orbital
para órbita elíptica pode ser obtida substituindo a
distância r pelo valor do semi-eixo maior da elipse
a, resultando em:
2π 2 3/ 2
2π 2 3/ 2
T
=
→T
r =
a (Órbita Elíptica)
µ
µ
µ
r = 2 T 2/3
4π
Sob essa condição, um período orbital específico pode ser dimensionado por intermédio
da escolha adequada do raio orbital. Isso permite
à engenharia de planejamento de órbitas de satélite estudar e selecionar períodos orbitais mais
adequados aos requisitos das aplicações levando
os satélites a determinadas posições de altitude.
As coordenadas de órbita dos satélites são
especificadas em relação ao período de dia sideral (sidereal day) ao invés do período de dia em
relação ao sol (sun day). O período de dia em relação ao sol o qual forma a base de referência
Anotações
(1.9)
para todos os padrões de tempo globais é baseado na rotação da Terra tomando o Sol como referência enquanto o tempo sideral é baseado na
rotação da Terra em relação a uma estrela infinitamente distante (fixa). São períodos de revolução
muito próximos. Especificamente, o dia solar tem
duração exata de 24 horas e o dia sideral tem duração de tempo igual à 23h 56min e 4s resultando
em um tempo total de 86.164 segundos conforme
mostra a Figura 7. Assim, um dia sideral tem duração ligeiramente menor (0.3%) quando comparado com o dia solar.
18
Capítulo 1 - Satélites – Órbitas
Figura 7 - Conceitos sobre o período de dia solar e o período de dia sideral.
1.4. Plano Orbital de um Satélite
Assim, baseado no sistema de tempo sideral, um
raio orbital pode ser escolhido (por exemplo) com
o objetivo de fazer o período de revolução de um
satélite ser exatamente igual ao período de rotação da Terra resultando em um efeito posicional
estacionário para o satélite. Para um observador
na Terra, tudo se passa como se o satélite estivesse parado. Neste sentido, a configuração da
órbita do satélite deve ser caracterizada por certas particularidades para que o satélite seja visto
de forma fixa no céu. Com isso, torna-se necessário definir as características do plano orbital
de um satélite. É por intermédio das diferentes
Anotações
configurações de órbita que existem diferentes
tipos de órbita – mais adequadas a certos tipos
de aplicações. De forma inicial, é possível citar
três informações principais que caracterizam um
plano de órbita de um satélite:
• Orientação do plano orbital;
• Excentricidade da órbita;
• Distância em relação à Terra.
Capítulo 1 - Satélites – Órbitas
1.4.1. Orientação do Plano Orbital
Um plano orbital de um sistema de satélite pode
ter diferentes orientações em relação ao plano do
equatorial da Terra (referente à linha do equador).
O ângulo formado entre o plano orbital e o plano
equatorial é denominado de ângulo de inclinação
do satélite. A Figura 8 mostra os tipos de orientações para o plano orbital de um sistema de satélite evidenciando as órbitas – equatorial – polares
e inclinadas.
Figura 8 - Orientações dos planos orbitais.
Anotações
19
20
Capítulo 1 - Satélites – Órbitas
No caso da orientação equatorial o ângulo
de inclinação do satélite é igual a zero fazendo
com que o plano orbital do satélite coincida com
o plano equatorial da Terra. Ressalta-se que a coordenada de latitude está relacionada com o ângulo medido entre o plano do equador e a superfície de referência. Isso significa que a coordenada
de latitude para o satélite é 0º quando este estiver
configurado em um plano orbital equatorial. Para
um ângulo de inclinação igual à 90º, o plano orbital é dito como polar enquanto para um ângulo de
inclinação entre 0º e 180º, o plano orbital é dito
como inclinado. Assim, para uma inclinação entre 0º e 90º o satélite se move na mesma direção
que a rotação da Terra e como resultado tem-se
uma órbita progressiva. No caso de uma inclinação entre 90º e 180º o satélite se move em uma
direção contrária a direção de rotação da Terra resultando em uma órbita regressiva. A maioria dos
satélites é lançada em órbitas progressivas uma
vez que a própria velocidade de rotação da Terra
pode ser usada a favor da velocidade orbital do
satélite (economizando energia no lançamento).
1.4.2. Excentricidade do Plano Orbital
Referente à excentricidade do plano orbital, esta
pode ser classificada em elíptica ou circular dependendo do valor da excentricidade da órbita.
Assim, conforme exposto, existem diferentes formas de se estimar a excentricidade de um plano
orbital. A Figura 9 mostra as distâncias envolvidas
em uma órbita elíptica evidenciando os pontos
de perigeu e apogeu. A excentricidade de uma
órbita pode ser obtida por intermédio da relação
entre as distâncias (diferença e soma) ao ponto
de perigeu e apogeu do sistema. Neste sentido,
quanto à excentricidade de uma órbita está entre
zero e um tem-se um plano orbital elíptico. Quando a excentricidade da órbita é igual a zero, o plano orbital é circular.
Figura 9 - Conceitos sobre excentricidade da órbita elíptica.
Anotações
Capítulo 1 - Satélites – Órbitas
21
1.4.3. Distância em relação à Terra
Em um primeiro momento, é importante ressaltar que dependendo dos objetivos do sistema
de satélite, têm-se planos orbitais mais adequados para determinadas aplicações. Isso significa que os planos orbitais podem configurar
diferentes distâncias até a Terra. Dependendo
da distância em relação à Terra, é possível
classificar os planos orbitais em órbitas baixas
(LEO – Low Earth Orbit), órbitas médias (MEO
– Medium Earth Orbit) e órbitas geoestacionárias GEO (Geostacionary Earth Orbit) conforme
destaca a Figura 10.
Figura 10 - Tipos de planos orbitais – LEO – MEO – GEO.
Os satélites LEO orbitam ao redor da Terra com distâncias que podem variar de 160 km a
500 km de altura em relação à superfície terrestre.
São satélites de órbitas baixas com períodos orbitais muito curtos. Por estar a distâncias bem próximas, o atraso de propagação dos sinais tem pequena duração e isso pode facilitar as aplicações
de comunicações do satélite. De fato, com atrasos de propagação menores em virtude das distâncias menores, o satélite não precisa trabalhar
Anotações
com elevada potência de transmissão levando a
uma possível redução dos custos em seu desenvolvimento resultando em projetos de construção
mais compactos para o sistema de satélite. No
entanto, devido ao período orbital curto dos satélites LEO, estes não podem oferecer uma cobertura 24 horas para uma determinada estação terrena. São necessários vários satélites LEO para
que a cobertura de uma estação seja feita a todo
o momento. O projeto Motorola Iridium (lançado
22
Capítulo 1 - Satélites – Órbitas
em meados de 1999) é um exemplo da utilização
de satélites LEO para implantação de um sistema
de comunicação via satélite [1]. Existem 66 satélites Iridium formando uma constelação de satélites
de órbita baixa com o objetivo de fornecer um serviço móvel digital para transmissão de sinais de
sistemas de telefonia. O termo Iridium que define
o nome do projeto foi proposto inicialmente com
uma arquitetura de 77 satélites o qual representa
o número atômico do elemento químico (Iridium).
Os satélites de órbita média (MEO) normalmente são de órbitas polares e são utilizados
principalmente em comunicações para navegação. Estão situados a alturas que podem variar
de 10.000 km a 20.000 km em relação à superfície terrestre. Os satélites MEO podem cobrir
boa parte (grandes regiões) do planeta Terra e
possuem período orbital entre 6 e 12 horas. No
entanto, as distâncias envolvidas implicam em
atrasos bem maiores que os satélites LEO. Neste sentido, o interessante seria a busca por um
plano orbital que pudesse atender ao requisito
de cobertura 24 horas conforme citado anteriormente e ao mesmo tempo, fosse caracterizado
1
3
por particularidades que favorecem o sistema de
lançamento e controle do satélite.
A Terceira Lei de Kepler remete ao fato de
que existe uma relação direta entre o raio orbital de um plano orbital e o período de revolução
(orbital) de um satélite. Conforme destacado anteriormente, é possível, para a engenharia de planejamento de satélites, estabelecer requisitos de
operação para que o tempo orbital de um satélite
seja igual ao tempo de rotação da Terra. Dessa
forma, o satélite poderia ser utilizado para prover
uma cobertura de 24 horas para uma determinada região da Terra. Assim, a partir de um tempo
orbital adequado, se a excentricidade do plano
orbital for igual a zero e o ângulo de inclinação do
satélite for 0º (plano equatorial) o satélite terá um
efeito posicional estacionário como se fosse um
ponto fixo no céu. Esta característica confere o
nome geoestacionário ao plano orbital GEO.
Assim, baseado na Terceira Lei de Kepler e
tomando o sistema de tempo-dia sideral é possível calcular o raio orbital que resulte em um período orbital igual à 23h 56min 4s de acordo com o
seguinte desenvolvimento matemático:
2
µ
Raio Orbital = 2 × Tempo Orbital 3
4π
1
3
(1.10)
2
3.9860064 × 105
3
Raio Orbital =
42.164,176 km
× ( 86.164.09 ) =
2
π
4
Com o valor do raio orbital relacionado
ao tempo orbital parametrizado e sabendo que
o raio da Terra (equatorial) é igual a 6.378 km
torna-se possível estimar a altura de um satélite
Anotações
geoestacionário (35.786 km) para o estabelecimento de comunicações com 24 horas de cobertura conforme mostra a Figura 11.
Capítulo 1 - Satélites – Órbitas
23
Figura 11 - Cálculos para determinação da altura de um satélite geoestacionário.
Normalmente, o valor da distância da órbita GEO (35.786 km) pode ser aproximado para
36.000 km nos cálculos de sistemas de satélite
que não exijam precisão matemática detalhada
(estimativas rápidas de cálculo para diagnósticos, por exemplo). É importante notar que o plano orbital geoestacionário é ideal e não pode ser
alcançado perfeitamente por satélites reais em
virtude das diferentes forças espaciais que atuam
no satélite, além da força gravitacional da Terra.
A trajetória perfeita de uma órbita GEO é
muito difícil de ser mantida precisamente, pois
exigiria um gasto expressivo de energia para o
Anotações
controle dos sistemas de estabilidade do satélite a fim de manter a posição correta dentro da
órbita. Isso significa que estabelecer uma órbita
em um plano precisamente equatorial com inclinação e latitude zero implicaria em alta complexidade e custos energéticos para o sistema de satélite. Na prática, o plano orbital geoestacionário
possui uma ligeira (pequena) inclinação levando
a uma reduzida excentricidade (não zero) da órbita. Esta órbita real geoestacionária, presente
na prática dos sistemas de satélite também é conhecida como órbita geossíncrona – GSO (Geosynchronous Earth Orbit). Especificamente, um
24
Capítulo 1 - Satélites – Órbitas
tempo orbital de revolução igual (ou aproximadamente) ao dia sideral e a direção do movimento
do satélite no mesmo sentido de rotação da Terra são as condições para que um plano orbital
(com qualquer inclinação) seja classificado como
geossíncrono. Um satélite ideal geoestacionário
possui o mesmo sincronismo presente em um
plano GSO, mas com inclinação essencialmente
igual a zero. Neste sentido, embora os dois termos (GEO e GSO) sejam usados de forma intercambiável na prática, um satélite geoestacionário
é sempre geossíncrono, mas o contrário não é
verdadeiro. De fato, o importante é verificar que
as forças extras do sistema planetário interferem
no estabelecimento de uma órbita perfeitamente
geoestacionária. Neste sentido, torna-se necessário estabelecer um controle síncrono da órbita
geoestacionária a fim de controlar a posição de
satélite dentro de um range geoestacionário síncrono (GSO).
1.4.3.1. Ângulos de Visada do Sistema de Satélite
Os ângulos de visada de um sistema de satélite
estão relacionados com as coordenadas de localização para que as estações terrenas consigam
estabelecer as comunicações com um determinado satélite. Uma vez que a estação terrena esteja dentro da área de cobertura do satélite, um
processo de apontamento deve ser feito para que
o sistema de comunicação possa ter sucesso no
estabelecimento das comunicações. Este processo de apontamento da antena da estação terrestre é baseado nos conhecimentos dos ângulos de Azimute e Elevação da estação terrena. O
ângulo de elevação E do sistema de satélite tem
relação direta com a distância do satélite com a
estação terrena.
Com o objetivo de estudar e determinar os
ângulos de visada torna-se necessário conhecer
a posição do satélite na órbita a qual é feita por
meio de um subponto de satélite. O subponto de
um satélite é determinado pela localização na superfície terrestre que interliga diretamente o satélite ao centro da Terra, ou seja, é a projeção de localização terrestre do satélite pelo eixo direto que
liga o centro da Terra ao satélite em uma dada
posição orbital (Figura 12). É por intermédio do
Anotações
subponto do um satélite que é possível determinar qual é o ângulo de Azimute de uma estação
terrena. Para um observador posicionado no subponto terrestre de um satélite, o próprio satélite
estaria bem acima (verticalmente) do observador.
Figura 12 - Conceitos sobre
o sub-ponto de um satélite.
Capítulo 1 - Satélites – Órbitas
25
1.4.3.1.1. Ângulo de Azimute
A Figura 13 mostra os planos que são utilizados
para a definição do ângulo de Azimute de uma
estação terrena. O ângulo de Azimute A de uma
estação terrena é definido como o ângulo produzido pela linha de intersecção entre o plano local
horizontal e o plano que passa através da estação terrena, do satélite e do centro da Terra em
relação ao norte verdadeiro. É possível notar que
a linha de intersecção entre os planos mencionados (horizontal e o plano Satélite-Terra-Centro)
pode resultar em diferentes retas-tangentes no
ponto da estação terrena. Isso significa que a determinação do ângulo de Azimute de uma estação é dependente das relações entre a posição
– localização da estação terrena e do subponto
do satélite.
Figura 13 - Definição dos planos para determinação do Ângulo de Azimute.
Anotações
26
Capítulo 1 - Satélites – Órbitas
Assim, considerando a posição fixa da estação terrena têm-se quatro combinações que relacionam a posição relativa entre a estação terrena (ET) e
o subponto do satélite (SS). Essas quatro combinações são mostradas na Figura 14 e por intermédio
da posição relativa pode-se calcular o ângulo de Azimute ponderado pela seguinte análise:
• Se a estação terrena estiver posicionada no hemisfério Norte:
»» A = 180° - A’, se a estação terrena estiver a oeste do sub-ponto do satélite
»» A = 180° + A’, se a estação estiver a
leste do sub-ponto do satélite.
• Se a estação terrena estiver posicionada no hemisfério sul:
»» A = A’, se a estação terrena estiver a
oeste do sub-ponto do satélite
»» A = 360° - A’, se a estação estiver a
leste do sub-ponto do satélite.
Figura 14 - Determinação do ângulo de Azimute em função da posição
relativa entre a estação terrena e o subponto do satélite
Anotações
Capítulo 1 - Satélites – Órbitas
O ângulo de Azimute intermediário (A’) depende das coordenadas de latitude e longitude
da estação terrena e da longitude do satélite. A
Figura 15 ressalta os conceitos do sistema de
coordenadas com os sinais aplicados à longitude
(referente ao meridiano de Greenwich) e latitude
(referente à linha do equador).
Figura 15 - Conceitos referentes ao sistema
de coordenadas de longitude e latitude.
A Figura 16 mostra um esquema geométrico contemplando as coordenadas de longitude
do satélite e da estação terrena em conjunto com
a latitude da estação terrena para determinação
do ângulo de azimute do sistema. É interessante notar que o ângulo de azimute é medido no
sentido horário (0º a 360º) a partir do norte verdadeiro até a intersecção dos planos TSO e TPM. O
referido plano TSO engloba o satélite, a estação
terrena e o centro da Terra enquanto o plano TPM
é o plano local horizontal da estação terrena.
Anotações
27
28
Capítulo 1 - Satélites – Órbitas
Figura 16 - Esquema geométrico para determinação do ângulo de azimute.
Assim, com a informação das coordenadas
de longitude do satélite (θs), da longitude da estação terrena (θlong) e da latitude da estação terrena (θlat), é possível, através de manobras de
MP
A ' = arctan
MT
(
tan θ − θ
s
long
A ' = arctan
sin (θ lat )
Logo, baseado na análise da posição relativa do subponto do satélite em relação à estação
terrena e a partir das coordenadas de posição do
Anotações
trigonometria-matemática, calcular a tangente inversa dos segmentos MP e MT para determinar o
ângulo de Azimute intermediário (A’):
)
(1.11)
satélite e da estação terrena, torna-se possível
calcular o ângulo de azimute do sistema de satélite para o apontamento da antena na estação.
Capítulo 1 - Satélites – Órbitas
1.4.3.1.2. Ângulo de Elevação
O Ângulo de elevação E é o ângulo produzido entre a linha de intersecção do plano local
horizontal com o plano que interliga a estação
terrena, o satélite e o centro da Terra com a linha
que interliga o satélite com a estação terrena conforme mostra a Figura 17.
Figura 17 - Definição dos planos para determinação do Ângulo de Elevação.
Anotações
29
30
Capítulo 1 - Satélites – Órbitas
A Figura 18 mostra um esquema geométrico para a ilustração do ângulo de elevação em
mais detalhes. Assim, o ângulo de elevação (E)
pode ser interpretado como uma medida do grau
de inclinação do caminho de visada até o satélite
e tem influência direta na determinação da distância entre o satélite e a estação terrena, além de
questões relacionadas à atenuação por chuva e
gases atmosféricos.
Figura 18 - Ilustração para entendimento dos conceitos do ângulo de elevação.
O cálculo do ângulo de elevação é mostrado
na equação 1.12 e depende diretamente das coordenadas de latitude e longitude da própria estação
terrena, do raio orbital, do raio da Terra e da coordenada de longitude do satélite resultando em:
E
(
)
r − R cos (θ lat ) cos θ s − θ long
arctan
−1
R sin cos cos (θ lat ) cos θ s − θ long
Anotações
{
(
)}
−1
− cos cos (θ lat ) cos θ s − θ long
(
)
(1.12)
Capítulo 1 - Satélites – Órbitas
31
1.4.3.1.3. Exemplo – Azimute e Elevação
Uma estação terrena é localizada por meio das
coordenadas de longitude (30º West - Oeste) e
latitude (60º North - Norte). Com esse par de localizações, o objetivo seria determinar os ângulos
de Azimute e Elevação da estação terrena em relação a um satélite geoestacionário com coordenada de longitude de 50º –West – Oeste. O raio
orbital do sistema é de 42.164 km (considerando
um raio equatorial-Terra igual a 6.378 km).
da estação terrena (60º ao Norte) releva que a
estação está localizada no hemisfério Norte. Além
disso, nota-se pela Figura 19 que a estação terrena está a leste do subponto do satélite. Com isso,
a ponderação no cálculo do ângulo de Azimute
intermediário segue a seguinte condição:
Solução: O primeiro ponto de análise reside na posição relativa entre a estação terrena e o
satélite. Neste sentido, a coordenada de latitude
»» A = 180º + A’, se a estação terrena estiver a leste do subponto do
satélite;
• Se a estação terrena estiver posicionada
no hemisfério norte:
Figura 19 - Ilustração do software Google Earth para determinação da posição
relativa entre a estação terrena e o subponto do satélite.
Anotações
32
Capítulo 1 - Satélites – Órbitas
Com estas informações (latitude e longitude
da estação terrena e a longitude do satélite) é possível calcular o ângulo de Azimute da seguinte forma:
(
)
(
)
tan θ − θ
tan −50º − ( −30 ) º
tan ( 20º )
long
s
0.364
arctan
arctan
=
=
A ' arctan =
arctan
sin (θ lat )
sin ( 60º )
sin ( 60º )
0.866
0.364
=
=
=
A ' arctan
( 0.420 ) 0.397radianos
0.866 arctan
180
22.78º
=
×
A ' 0.397 radianos=
π
(1.13)
A= 180º + A '= 180º +22.78º
A = 202.78º (Ângulo de Azimute)
θ s → Longitude do Satélite = 50ºW
θ long → Longitude da Estação Terrena = 30ºW
θ lat → Latitude da Estação Terrena = 60ºN
Considerando o raio orbital do satélite r =
42.164 km e o raio da Terra (equatorial) R = 6.378
km em conjunto com as coordenadas de longitude e latitude da estação terrena e da diferença
(
)
de longitude entre satélite e estação terrena, é
possível calcular o ângulo de elevação da estação de acordo com o seguinte desenvolvimento
matemático:
r − R cos (θ lat ) cos θ s − θ long
E arctan
− cos −1 cos (θ lat ) cos θ s − θ long
−1
R sin cos cos (θ lat ) cos θ s − θ long
42.164 − 6.378 × cos ( 60º ) cos ( 20º )
− cos −1 cos ( 60º ) cos ( 20º )
E arctan
6.378 × sin cos −1 ( cos ( 60º ) cos 20º )
42.164 − 2.996, 67
− cos −1 0.4698
E = arctan
6.378 × sin cos −1 0.4698
39.167,33
−1
E arctan
=
= 0.3462
− cos 0.4698
5630,32
{
(
{
{
E= 0.3462 ×
Anotações
180
= 19.83º
π
)}
}
}
(
)
(1.14)
Capítulo 1 - Satélites – Órbitas
33
Portanto, os ângulos de azimute e elevação
da estação terrena são:
Ângulo de Elevação da estação terrena E = 19.83º
Ângulo de Azimute da estação terrena A = 202.78º
(1.15)
1.4.3.1.4. Declinação Magnética
Um ponto importante a se considerar sobre o ângulo de Azimute está relacionado com a declinação magnética da Terra. Foi visto que o ângulo
de Azimute é uma medida angular, contada no
sentido horário, a partir do norte geográfico até
a intersecção dos planos contendo o satélite, a
estação terrena em questão e o centro da Terra,
em relação ao plano horizontal. Em função do
magnetismo terrestre, existe uma diferença de
direção entre o norte geográfico e o norte magnético. Essa diferença é referenciada como a declinação magnética da Terra. Assim, a declinação
magnética de um local é uma medida do ângulo
formado entre a direção do norte magnético em
relação ao norte geográfico, conforme mostra a
Figura 20.
Figura 20 - Conceitos sobre a declinação magnética da Terra.
Anotações
34
Capítulo 1 - Satélites – Órbitas
Assim, o polo norte geográfico não coincide
com o polo norte magnético. Logo, o apontamento por meio de uma bússola magnética indica
uma direção que é diferente do norte geográfico
o qual é conhecido como norte verdadeiro.
A maioria dos apontamentos de um sistema de irradiação através das antenas é feita com
o auxílio da bússola magnética. Isso significa que
o ângulo de Azimute para apontamento em um
sistema de satélite é influenciado pela declinação
magnética da Terra em virtude da diferença entre o
norte geográfico (verdadeiro) e o norte magnético.
De forma geral, essa declinação magnética
pode ser interpretada como um desvio entre o
Azimute verdadeiro e o correspondente Azimute
magnético. Com isso, é estabelecida uma forma de calcular a declinação magnética da Terra
para que o ângulo de Azimute magnético possa
ser corrigido levando a um correto apontamento
de Azimute das antenas em sistemas de satélite. O cálculo da declinação magnética da Terra
é realizado com o auxílio da carta de declinação
magnética da correspondente localidade. Neste
sentido, é importante destacar que a declinação
magnética se altera para cada localidade em
questão e também ao longo do tempo. O Observatório Nacional [2] fornece a carta de declinação
magnética do Brasil a qual é mostrada na Figura
21 e colocada como anexo do Módulo 2 – Sistemas de Comunicações Digitais via Satélite.
Figura 21 - Carta de Declinação Magnética
do Observatório Nacional [2].
Anotações
Capítulo 1 - Satélites – Órbitas
O cálculo da declinação magnética é realizado em função das curvas da carta de declinação magnética em conjunto com informações
referente ao ano de observação e confecção da
carta, além de uma tabela de valores que descrevem a fração do ano. É possível notar que existem duas famílias de curvas na carta de declinação magnética mostradas na Figura 21 (além da
Tabela de valores de fração do ano). As curvas
Isogônicas (vermelhas) unem os pontos que possuem mesma declinação magnética enquanto as
35
curvas Isopóricas (azuis) as quais indicam as regiões que possuem a mesma variação anual de
declinação magnética. Assim, localizada a região
para o cálculo da declinação magnética tornase necessário realizar uma interpolação com as
curvas fornecidas para encontrar precisamente
os valores interpolados das curvas Isogônicas e
Isopóricas. Com estes valores, é possível utilizar
a seguinte equação para determinação da declinação magnética de uma dada localidade:
D = CIG + ( A + FA ) × CIP
D → Declinação Magnética
CIG → Valor Interpolado da Curva Isogônica
A → Diferença entre o ano de confecção do mapa de declinação magnética e o ano da observação
FA → Fração do Ano (Tabela de Valores)
(1.16)
CIP → Valor Interpolado da Curva Isopórica
Exemplo de Cálculo de Declinação Magnética:
A Figura 22 mostra um exemplo de análise para a interpolação dos valores da carta de
declinação magnética realizada para a cidade de
Campinas. O primeiro ponto a se observar é a forma como deve ser feita a interpolação dos valores das curvas (Isogônica e Isopórica):
• Procedimento de Interpolação das
Curvas:
Com uma régua colocada de forma ortogonal a uma das curvas, mede-se a
distância (linear) entre as curvas que
compreendem-circundam a cidade alvo
para o cálculo da declinação magnética.
A interpolação é feita medindo-se a relação entre a distância entre as curvas e a
distância do ponto da cidade alvo com
as curvas analisadas.
Anotações
Em um primeiro momento, são analisadas as curvas Isogônicas de declinação
(vermelhas) que compreendem a cidade
de Campinas (as curvas estão entre -20º e
-21º). Baseado em uma regra de proporção é possível calcular o calor de Cig resultando em uma declinação de -20.370º.
O mesmo procedimento de interpolação
é realizado para as curvas de variação de
declinação magnética anual entre -6.0’ e
-5.5’– Isopóricas (azuis). É importante ressaltar que o espaçamento entre as curvas
Isogônicas é dado em graus (º) enquanto
para as curvas Isopóricas é dado em minutos (‘). Assim, o valor de Cip interpolado
é de -5.631’ (minutos).
36
Capítulo 1 - Satélites – Órbitas
Figura 22 - Exemplo de cálculo da declinação
magnética para a cidade de Campinas
A carta de declinação analisada foi confeccionada no ano de 2012. Assim, o valor da variável A é dado pela diferença entre o ano em que
a observação está sendo feita (2014) e o ano de
confecção da carta (2012) resultando em A = 2.
Observando a tabela de valores para fração do
ano e considerando o mês de agosto (exemplo),
tem-se o valor de FA = 0.6. Com esses valores
pré-definidos em conjunto com os valores interpolados provenientes da carta torna-se possível
calcular a declinação magnética na cidade de
Campinas de acordo com o seguinte desenvolvimento mostrado novamente:
Anotações
D = CIG + ( A + FA ) × CIP
D → Declinação Magnética
CIG = −20.370º
A=2
FA = 0.6
CIP = −5.631'
D = −20.370º + ( 2 + 0.6 ) × −5.631'
D =−20.370º + ( −14.6404 ')
D=
−20º 22 '12 ''− 0º14 '38.4 ''
−20º 36 '50.4 '' =
−20.614º
D=
(1.17)
Capítulo 1 - Satélites – Órbitas
37
O segundo ponto importante é verificar a
relação existente entre o norte verdadeiro (geográfico) e o norte magnético. O norte apontado
pela bússola é o Norte Magnético. E o ângulo de
azimute calculado é em relação ao Norte Geográfico. Para se obter o valor correto do Azimute
verdadeiro (Norte Geográfico) basta somar ou
subtrair a declinação magnética (que é o ângulo
formado entre o norte geográfico e o norte magnético) do valor indicado pela bússola (Azimute
magnético). No caso no qual o polo magnético
está a oeste do polo geográfico, a declinação
magnética é ocidental e possui valor negativo.
No caso da declinação magnética oriental (polo
magnético a leste do polo geográfico) a declinação é positiva. No caso do Brasil, a declinação
magnética é ocidental e, portanto, com valor negativo. Isso significa que, para o caso do Brasil,
o Azimute verdadeiro é igual ao Azimute magnético menos a declinação magnética conforme
mostra a equação:
Azv
= Azm + ( − D )
Azv → Azimute verdadeiro (relação ao Norte Geofráfico)
Azv → Azimute magnético (medido pela Bússola)
D → Declinação magnética (calculada)
Para o caso de declinação magnética oriental, o valor do Azimute magnético medido deve
ser somado com a declinação magnética positiva
calculada resultando em:
Azv
= Azm + D
Anotações
(1.19)
(1.18)
38
Capítulo 1 - Satélites – Órbitas
1.4.3.2. Cálculo da Distância Inclinada do Satélite (Slant Range)
A distância inclinada D (Slant Range) é o valor
que define a distância (metros) entre o satélite e
a estação terrena. O ângulo de elevação E possui relação com a distância inclinada a qual impacta diretamente no tempo de propagação dos
sinais nas comunicações por satélite. Além disso, já é importante mencionar que quanto maior
é a distância entre o satélite e a estação terrena
(maior D), maiores são os efeitos de atenuação
por propagação do sinal transmitido para o satélite na subida (uplink) e também na descida
(downlink). A Figura 23 evidencia dois conceitos
importantes para os satélites de comunicações.
Figura 23 - Conceito da distância inclinada e área de cobertura.
Anotações
Capítulo 1 - Satélites – Órbitas
O primeiro conceito é o ângulo de cobertura
(relacionado com a área de cobertura do satélite).
O segundo conceito é justamente a distância inclinada que define o quão distante o satélite está
em relação à estação terrena. Essa informação é
fundamental para o desenvolvimento de projetos
de sistemas de comunicações via satélite bem
39
como a sua análise de desempenho. É interessante notar que a distância inclinada difere da
altura do satélite (referente à órbita) dependendo do ângulo de elevação utilizado. A equação
abaixo retrata os parâmetros necessários para o
cálculo da distância inclinada em um sistema de
satélite:
R
2
R 2 + ( R + H ) − 2 R ( R + H ) sin E + sin −1
R + H
D → Distância Inclinada
R → Raio da Terra (6.378 km)
H → Altura do Satélite acima da superfície terrestre
D=
cos
E
(1.20)
E → Ângulo de Elevação da estação terrena
É interessante notar que a área de cobertura depende diretamente do ângulo de cobertura mostrado na Figura 23, o qual possui relação
com o ângulo de elevação de acordo com a seguinte equação:
R
Ângulo de Cobertura= α= sin
R + H
−1
Isso significa que a distância inclinada está
relacionada com o ângulo de cobertura e depende
do ângulo de elevação da antena na estação terrena. Se o ângulo de elevação E for igual à 90º, o
termo cossenoidal da equação se anula levando à
distância inclinada ao valor de altura do satélite (H)
conforme o seguinte desenvolvimento matemático:
Anotações
cos E
(1.21)
40
Capítulo 1 - Satélites – Órbitas
D=
R
2
R 2 + ( R + H ) − 2 R ( R + H ) sin 90º + sin −1
R + H
D=
R2 + ( R + H ) − 2R ( R + H ) ×1
D=
R 2 + ( R + H ) − 2 R 2 − 2 RH
D=
R 2 + ( R + H ) − 2 R 2 − 2 RH
D=
R 2 + R 2 + RH + RH + H 2 − 2 R 2 − 2 RH
D=
R2
D=
R2
D
=
=
D
para E = 90º
2
2
2
(
+ (R
+ (R
(1.22)
)
)
) − 2R
2
+ 2 RH + H 2 − 2 R 2 − 2 RH
2
+ 2 RH + H 2
2
− 2 RH
H2 H
=
Assim, para E = 90º, a distância D entre o
satélite e a estação terrena é igual à altura do satélite em sua órbita em relação à superfície terrestre (H = 35.768 km). Como consequência, tem-se
um tempo de propagação menor para comunicações e, ao mesmo tempo, menor atenuação
por propagação em virtude da distância reduzida. Para o caso em que E=0º, tem-se a elevação
D=
cos90º ,
R
2
R 2 + ( R + H ) − 2 R ( R + H ) sin 0º + sin −1
R + H
mínima da antena da estação terrena levando a
uma distância inclinada (D) maior do que a altura
do satélite. Isso implica em maior atenuação por
propagação em função da maior distância entre
o satélite e a estação terrena. A equação abaixo
mostra o valor da distância inclinada entre um satélite e uma estação terrena com ângulo de elevação igual a zero em órbita geoestacionária:
cos 0º , para E = 0º
6.378
2
6.3782 + ( 6.378 + 35768 ) − 2 × 6.3678 ( 6.378 + 35768 ) sin 0º + sin −1
=
E 0º
cos 0º , para
6.378 + 35768
D = 41.660,61 km
Anotações
(1.23)
Capítulo 1 - Satélites – Órbitas
41
1.4.3.2.1. Exemplo – Cálculo da Distância Inclinada
A Figura 24 mostra um esquema ilustrativo de
duas estações terrenas que se comunicam por
intermédio de um satélite geoestacionário. As informações de localização de cada estação são:
• Coordenadas da Estação Terrena A:
»» Latitude: 30ºN
»» Longitude: 60ºW
• Coordenadas da Estação Terrena B:
»» Latitude: 45ºN
»» Longitude: 90ºW
• Coordenadas do Satélite:
»» Latitude: 0º (Equador)
»» Longitude: 105ºW
Figura 24 - Exemplo de cálculo da distância inclinada
na comunicação entre duas estações terrenas.
Anotações
42
Capítulo 1 - Satélites – Órbitas
comunicações intermediárias no sistema
Estação A – Satélite e Estação B – Satélite.
Inicialmente, o objetivo é estabelecer uma
comunicação bidirecional entre as estações com
taxa de transmissão igual a 10 Mbps (velocidade). A partir da estimação da distância inclinada
entre as estações e o satélite GEO, qual seria o
tempo de propagação total para transferir um pequeno arquivo de imagem com tamanho igual a
62.5kbytes (500x103 bits)? Considere o raio orbital do satélite r = 42.164 km (H = 35.768 km) e o
raio da Terra R = 6.378 km.
–– Essa condição (cálculo e ajuste dos ângulos de visada da estação terrena em
conjunto com as antenas do satélite) determina o correto apontamento do sistema para que as comunicações possam
ser estabelecidas.
• Estação Terrena A (Latitude = 30ºN e
Longitude = 60ºW):
Solução:
–– A primeira análise consiste na determinação dos ângulos de visada (elevação)
das estações terrenas para o respectivo satélite GEO a fim de estabelecer as
»» Cálculo do ângulo de elevação EA:
42.164 − 6.378 × cos ( 30º ) cos ( 105º −60º )
E A arctan
6.378 × sin cos −1 ( cos ( 30º ) cos 105º −60º )
E A = 30.25º
{
}
− cos −1 cos ( 30º ) cos ( 105º −60º )
(1.24)
• Estação Terrena B (Latitude = 45ºN e
Longitude = 90ºW):
»» Cálculo do ângulo de elevação EB:
42.164 − 6.378 × cos ( 45º ) cos ( 105º −90º )
EB arctan
6.378 × sin cos −1 ( cos ( 45º ) cos 105º −90º )
EB = 36.05º
{
Anotações
}
− cos −1 cos ( 30º ) cos ( 105º −90º )
(1.25)
Capítulo 1 - Satélites – Órbitas
43
Com os ângulos de elevação (EA e EB) calculados torna-se possível estimar a distância inclinada entre cada estação terrena e o satélite GEO
conforme as seguintes equações:
DA =
R
2
R 2 + ( R + H ) − 2 R ( R + H ) sin E A + sin −1
cos E A , para E A = 30.25º
+
R
H
6.378
2
6.3782 + ( 6.378 + 35768 ) − 2 × 6.3678 ( 6.378 + 35768 ) sin 30.25º + sin −1
cos30.25º
6.378 + 35768
DA = 38.571, 25 km
DA
=
DB =
=
DB
(1.26)
R
2
R 2 + ( R + H ) − 2 R ( R + H ) sin EB + sin −1
cos EB , para EB = 36.05º
R
+
H
6.378
2
6.3782 + ( 6.378 + 35768 ) − 2 × 6.3678 ( 6.378 + 35768 ) sin 36.05º + sin −1
cos36.05º
6.378 + 35768
(1.27)
DB = 38.075,90 km
Assim, a distância total inclinada entre as
duas estações terrenas é dada pela soma de DA
com DB resultando na seguinte distância total Dtotal:
Dtotal = DA + DB = 38.571,25 km + 38.075,90 km = 76.647212 km
(1.28)
O tempo de propagação dos sinais transmitidos neste range total de distância se relaciona com
a velocidade da luz (3x108ms) da seguinte forma:
(1.29)
O tempo requerido para transmitir uma
Anotações
44
Capítulo 1 - Satélites – Órbitas
imagem (arquivo) de 500x103 bits de informação
em um link de transmissão de 10 Mbps é da ordem de
Taxa de Transmissão = 10 Mbps
Tamanho do Arquivo (dados) = 62.5kbytes (500 × 103 bits): (1 byte = 8 bits)
10 × 106 bits ------------ 1s
500 × 103 bits ---------- ?
Tempo de Transferência = 50ms
Tempo total de atraso (propagação) = 255.49ms + 50ms = 305.49ms
Anotações
(1.30)
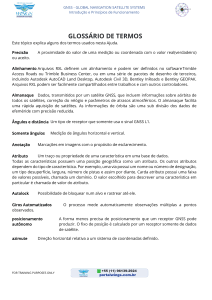
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
A Figura 25 ilustra inicialmente a arquitetura do
sistema de comunicação via satélite que é composta por segmentos de operação. Em cada segmento têm-se vários subsistemas constituindo
uma série de elementos de operação na rede de
comunicação por satélite.
A aplicação que será implementada sobre
a arquitetura (exemplos iniciais: comunicações
fixas por satélite, comunicações móveis, radiodifusão, comunicações de controle e medidas) determina quais são os subsistemas presentes nos
segmentos de operação do sistema de comunicação via satélite.
O segmento espacial é retratado pelos satélites ativos que estão em órbita formando a
constelação do segmento espacial. O segmento
terreno é caracterizado pelas estações terrenas
que se comunicam com o segmento espacial por
intermédio dos links de subida (uplink) e descida
Anotações
(downlink). O segmento de controle é composto
por um centro mestre de controle (MCC – Master
Control Center) o qual é responsável por realizar
as funções de rastreamento, comando e monitoramento (TTC – Tracking, Telemetry and Command) do satélite, além da gerência dos recursos
do próprio satélite.
46
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
Figura 25 - Arquitetura do sistema de comunicação via satélite
O objetivo de um sistema de comunicação
via satélite é viabilizar a implantação de serviços
de comunicação com elevada cobertura e qualidade por intermédio de um sistema de satélites dispostos em uma órbita operacional. Neste
sentido, dependendo das aplicações e serviços
da rede de comunicação por satélite, existem diferentes tipos de estações terrenas. A Figura 26
mostra os três tipos de estações terrenas que caracterizam diferentes configurações operacionais
para o segmento terreno.
Anotações
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
47
Figura 26 - Tipos de estações terrenas em um sistema de comunicação via satélite.
A estação terrena de interface possui o objetivo de interconectar o segmento espacial a uma
rede de comunicação terrestre realizando assim a
funcionalidade de um gateway dentro do sistema.
Logo, o subsistema de transmissão da estação
terrena de interface deve ser composto pelos blocos funcionais (equipamentos e sistemas) que interpretam e se comunicam com o segmento espacial além dos blocos que compõem o sistema de
telecomunicações que interliga a estação terrena
de interface com a rede de comunicação terrestre.
Essa rede transporte terrestre é responsável por
entregar e receber o fluxo de sinais dos terminais
de usuários que utilizam as aplicações implementadas no sistema de comunicação via satélite.
Anotações
A estação terrena de usuário é retratada
por equipamentos de comunicação portáteis
como handsets, estações móveis (menos complexas do que estações terrenas de interface)
permitindo ao usuário se conectar diretamente
com o segmento espacial. Isso significa que, por
intermédio desse tipo de estação, é possível realizar um by-pass sobre as redes de transporte
que interligam o segmento espacial ao segmento terrestre. Um exemplo de estação terrena de
usuário são os equipamentos VSATs (Very Small
Aperture Terminals) que operam com antenas de
diâmetro reduzido e são caracterizados pela sua
versatilidade na utilização de vários tipos de serviços por satélite.
48
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
As redes VSATs têm ajudado muitas empresas e corporações na busca por soluções de comunicação que utilizam sistemas de satélites. O
princípio do by-pass terrestre e da radiodifusão
das informações para pontos remotos de recepção possibilitam a implementação de serviços de
forma mais flexível e rápida. Naturalmente, dependendo dos objetivos da aplicação-solução implementada sobre a arquitetura e dos requisitos exigidos para o estabelecimento das comunicações,
um aumento de complexidade da estação pode
limitar o uso das VSATs tornando necessária a utilização de estações maiores.
Por intermédio do segmento espacial, as
estações de serviço podem ser utilizadas como
estações terrenas coletoras de informações dos
usuários (hub stations) e também como distribuidoras de informação para os usuários (feeder stations). As comunicações entre usuários acontecem por meio dos terminais de usuários que são
dispositivos como smartphones, computadores
entre outros dispositivos que são conectados à
rede de transporte terrestre ou a equipamentos
VSATs para comunicação.
2.1. Fundamentos dos Sistemas de Comunicações Digitais via Satélite
O desempenho de um link de comunicação entre equipamentos de transmissão e recepção em
um sistema de satélites depende da geração e
da detecção de um sinal de rádio (ou óptico) retratado por um sinal de onda portadora conforme
mostra a Figura 27.
Figura 27 - Parâmetros relacionados ao desempenho no sistema de comunicação via satélite.
Anotações
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
No lado da transmissão, a análise de desempenho e operação do transmissor está relacionada com a habilidade deste em gerar um
sinal robusto com uma potência efetivamente irradiada (EIRP – Effective Isotropic Radiated Power) adequada para as comunicações. No lado
da recepção, o desempenho do equipamento
receptor é dependente da figura de mérito G/T
que representa o ganho da antena utilizada na
recepção (em uma determinada direção) sobre a
temperatura equivalente de ruído do sistema. O
sucesso no estabelecimento das comunicações
em sistemas de satélite é o resultado da correta
detecção dos sinais de RF nos enlaces entre as
estações terrenas e os satélites.
Os links de subida (uplink) e descida (downlink) consistem na transmissão do sinal de portadora de RF enquanto os links entre satélites podem ser implementados com sinais no espectro
de RF (micro-ondas) ou, até mesmo, no espectro
óptico. Assim, o desempenho destes enlaces de
comunicação depende das condições de recepção e do conjunto de parâmetros citados os quais
são planejados e configurados para que a correta detecção dos sinais seja alcançada. A medida
utilizada para verificar as condições de desempenho de um link de satélite relaciona a potência do
sinal portadora recebida (C) pelo ruído (N) presente no sistema de comunicação resultando na
figura de mérito C/N. No âmbito dos projetos de
sistemas de comunicações via satélite também é
muito comum utilizar a relação entre a potência
do sinal portadora recebida (C) com a densidade espectral de potência do ruído (N0). Em um
primeiro momento, é importante perceber que o
valor da relação C/N ou C/N0 tem impacto significativo na qualidade do serviço oferecido a qual é
interpretada com outra figura de mérito denominada BER – Taxa de Erro de Bit (Bit Error Rate). A
BER é um indicador de desempenho utilizado no
contexto de sistemas de comunicações digitais e
Anotações
49
reflete a estimativa da probabilidade de erro de bit
do sistema digital.
Outro parâmetro importante que se soma às
informações da Figura 27 é a largura de banda
(B) dos sinais transmitidos. A largura de faixa ocupada depende da taxa de transmissão dos sinais
(que possui relação com a qualidade de serviço
requerida) além das técnicas de comunicações
utilizadas no sistema de comunicação. Neste
sentido, já seria interessante mencionar aqui que
existe uma relação de compromisso entre a potência (energia) utilizada nas comunicações e a
largura de banda ocupada pelos sinais. De fato, a
potência planejada para o sistema de satélite tem
forte impacto tanto na estação terrena como no
próprio satélite (tamanho – componentes – elementos – estrutura). Enquanto a largura de banda
está diretamente relacionada com a qualidade e
quantidade de serviços que podem ser transmitidos no sistema de comunicação via satélite. Estes parâmetros de planejamento na transmissão
e recepção bem como os indicadores de desempenho são postos em conjunto e analisados com
uma série de fatores no desenvolvimento dos
projetos de sistemas de comunicações via satélite bem como a sua análise de desempenho.
A Figura 28 ilustra de forma conceitual
como as questões técnicas de planejamento tem
relação com o provimento de serviços que são
implementados por intermédio de uma rede de
satélites. O provedor de serviços deve compor
seu planejamento do sistema de comunicação
via satélite ponderado pela arquitetura da operadora de satélite bem como pelos termos de contrato que são estabelecidos no desenvolvimento
de negócios entre as entidades. Assim, o provedor de serviços aluga um recurso do satélite
alocando os serviços e utilizando a capacidade
contratada do satélite.
50
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
Figura 28 - Relações entre os parâmetros técnicos de planejamento
e o provimento de serviços em sistema de satélite
A Figura 28 mostra um exemplo de aplicação na qual o provedor de serviços fornece
conectividade via satélite aos seus usuários podendo oferecer diferentes serviços via rede de
distribuição terrestre. De certo modo, o provedor
de serviços também poderá receber via satélite
outros serviços retransmitindo-os para os seus
clientes (usuários).
O papel da operadora de satélite é retratado
pela gerência e operação da sua rede de satélites tanto do ponto de vista técnico como administrativo (gerencial) a fim de comportar toda a
demanda alocada dos diversos clientes sem sobrecarregar o sistema de satélite. Neste sentido,
o planejamento de sistemas de comunicações
via satélite está presente tanto nos provedores
de serviço que contratam a operadora de satélite bem como na própria operadora que pode
Anotações
aumentar a estrutura da sua rede expandindo o
sistema e assim potencializando seus negócios.
Um dos objetivos principais das empresas
que contratam os serviços de operadoras de satélites é gerar receitas as quais dependem do número de conexões estabelecidas com sucesso
mantendo equilibradas as relações de compromisso técnicas entre potência e largura de banda
na alocação dos recursos requisitados.
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
2.2. Segmento Espacial – Funções e Subsistemas do Satélite
Para compreender como se torna possível utilizar de forma eficiente os recursos de um satélite de comunicação a fim de estabelecer links de
qualidade, torna-se necessário estudar o funcionamento do segmento espacial, ou seja, seria interessante examinar o satélite como um sistema.
Realizada uma primeira análise do sistema podese explorar os blocos funcionais que compõem
o satélite em sua dinâmica de funcionamento. O
segmento espacial é composto por dois sistemas
principais – Plataforma & Payload – conforme
mostra a Figura 29.
Figura 29 - Subsistemas do segmento espacial
Anotações
51
52
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
2.2.1. Sistema Plataforma do Satélite
O sistema plataforma consiste em toda a estrutura do satélite comportando vários subsistemas que estão relacionados com a aplicação do
segmento espacial e também com o segmento
de controle na arquitetura de um sistema de satélites. Isso significa que existem determinados
subsistemas de um satélite que são controlados
pelos sinais provenientes do segmento de controle. Esta seção traz uma descrição introdutória
de cada subsistema presente na plataforma do
satélite com o objetivo de elevar os conhecimentos sobre o segmento espacial, além do payload
de telecomunicações.
2.2.1.1. Subsistema de Hardware – Infraestrutura Mecânica
O subsistema de hardware para a mecânica de
estrutura do satélite possui relação com praticamente todos os outros subsistemas uma vez que
constitui toda a composição física do satélite bem
como a conexão dos vários subsistemas existentes, além da conexão entre o satélite e o veículo
de lançamento.
O formato da estrutura mecânica de um
satélite depende do método de estabilização utilizado para manter o satélite estável com apontamento correto para Terra. Neste sentido, a
composição física do satélite e o seu método de
estabilização dependem também da aplicação
(missão) do sistema de satélite. Não é o objetivo aqui aprofundar no subsistema de hardware
para mecânica de estrutura uma vez que existem
muitas particularidades de desenvolvimento de
elevada complexidade envolvidas na construção
de um satélite. Mas ainda assim, seria interessante comentar sobre os dois principais métodos de
estabilização empregados para prover a estabilidade e apontamento das antenas dos satélites:
• Método de Estabilização Rotacional Spin (Spin Stabilization):
Um satélite que possui seu subsistema
Anotações
de hardware – infraestrutura baseado
neste método possui (usualmente) o formato cilíndrico por causa dos requisitos
de balanceamento mecânico em torno
de um eixo central. Assim, é possível
manter o satélite em órbita por meio do
controle de rotação (spin) do próprio satélite em relação ao seu eixo central. É
importante ressaltar que forças externas,
como a própria radiação solar e meteoritos podem provocar torques indesejáveis no satélite levando-o a condições
de instabilidade. Nestes casos, o controle de estabilidade atua para manter
o satélite estável dentro do plano de órbita. Além disso, com o uso de antenas
direcionais (voltadas para a Terra) temse um subsistema de controle (motor) o
qual atua na plataforma (shelf) das antenas girando-as no sentido contrário ao
de rotação do satélite com o intuito de
promover o apontamento fixo das antenas direcionais.
• Método de Estabilização dos Três Eixos (Tree Axis Stabilization):
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
53
Um satélite que possui seu subsistema
de hardware – infraestrutura baseado
neste método possui circuitos e elementos de estabilização para cada um dos
três eixos do corpo do satélite o qual
permanece fixo no espaço. Em razão
disso, o controle de altitude do satélite
atua com rodas e motores de propulsão/
reação os quais são usados para correção e controle (de forma separada ou
combinada) dos eixos do satélite com o
objetivo de atingir a estabilidade.
2.2.1.2. Subsistema de Propulsão
O subsistema de propulsão é utilizado para fornecer a força necessária para imprimir a velocidade adequada ao satélite para realização de
manobras no espaço dentro do período de vida
do satélite. Isso significa que o subsistema de
propulsão tem papel fundamental no momento
de execução do plano lançamento e de transferência de órbita dos satélites geoestacionários.
O processo de lançamento de um satélite
em uma órbita depende principalmente da velocidade apropriada em cada ponto de trajetória
do plano orbital desde a estação de lançamento
terrena até o ponto final de estabilidade orbital.
Isso significa que existe um veículo de lançamento ao qual o satélite é acoplado em conjunto com
o subsistema de propulsão para que o sucesso
seja alcançado em todas as etapas de lançamento do satélite.
Anotações
A Figura 30 mostra de forma ilustrativa o
processo de transferência orbital de um satélite
para órbita geoestacionária. O processo de posicionamento orbital é realizado por meio de órbitas
de transferência. No caso dos satélites geoestacionários, tem-se como objetivo obter uma órbita
circular no plano equatorial. A órbita de transferência é utilizada como uma etapa intermediária
visando um planejamento de posicionamento
eficiente ponderado pelas questões de energia e
estabilidade orbital do sistema de satélite.
54
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
Figura 30 - Conceitos relacionados ao lançamento
de satélites e órbitas de transferência.
Assim, o veículo de lançamento injeta o satélite no ponto de perigeu de uma órbita elíptica
de transferência com uma determinada velocidade. Neste ponto, o satélite orbita se comunicando
com o segmento de controle a fim de garantir a
estabilidade nesta etapa de transição de órbita.
No ponto de apogeu da órbita de transferência o
subsistema de propulsão atua aumentando a velocidade do satélite de forma controlada para que
a transição de órbita seja alcançada e a trajetória
Anotações
geoestacionária tenha seu início. Com isso, a eficiência e a precisão do subsistema de propulsão
influenciam diretamente no sucesso de transição
orbital em sistemas de satélites.
É interessante comentar que o subsistema
de propulsão é baseado no conceito da terceira lei
de Newton a qual relaciona a toda força de ação
uma forma de reação com direção oposta. Assim,
por meio da injeção de velocidade em um corpo
em uma dada direção, tem-se uma força-empuxo
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
55
em direção contrária. Em subsistemas de propulsão líquidos ou sólidos, a ejeção de corpos com
massa com elevadas velocidades produzem a
geração de gases de alta pressão pela elevada
temperatura de decomposição dos propulsores
que são usados para alterar a trajetória e realizar
manobras nos satélites.
2.2.1.3. Subsistema de Controle de Temperatura
O subsistema de controle de temperatura é fundamental para que o satélite opere com temperatura dentro dos níveis admissíveis em função dos
tipos de componentes e equipamentos internos
do sistema. De fato, os satélites que orbitam a
Terra experimentam grandes variações de temperatura que devem ser controladas em um ambiente hostil que é o espaço sideral.
A garantia de sucesso na operação e processamento nos circuitos de um satélite é dependente do subsistema de controle de temperatura.
Com isso, o objetivo deste subsistema é garantir que todos os componentes que compõem os
blocos funcionais do satélite operem dentro de
um range de temperatura seguro para as operações do satélite. No entanto, é importante ressaltar que diferentes partes e componentes do
satélite operam com temperaturas nominais diferentes. A maioria dos circuitos eletrônicos internos que compõem o satélite opera dentro de um
range entre −20ºC a +55ºC enquanto as células
solares operam com range bem maior (−190ºC a
+60ºC). Isso exige eficiência e flexibilidade na atuação do subsistema de controle de temperatura.
Especificamente, existem fontes internas
(como os subsistemas de amplificação) e externas
(radiação solar e a radiação proveniente da Terra)
que produzem variação de temperatura no satélite. Assim, o objetivo específico do subsistema
Anotações
de controle de temperatura é realizar a remoção
ou a realocação do calor nas partes do satélite
procurando equilibrar a temperatura das diversas
partes que compõem toda a estrutura do sistema.
Thermal Blankets e Thermal Shields são técnicas
usadas como “escudos” de proteção (localizados
em pontos críticos do satélite) contra as variações
de temperatura. Espelhos de radiação (Radiation
Mirrors) são colocados em torno de circuitos eletrônicos essenciais para evitar a incidência de radiação sobre partes críticas do satélite. Além dessas técnicas, são usados bombeadores de calor
(heat pumps) para redistribuir o calor proveniente
dos circuitos que operam com elevada temperatura para outras partes do satélite criando um
caminho de transferência para o escape do calor
gerado pelo sistema.
56
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
2.2.1.4. Subsistema de Energia – Alimentação
A energia necessária para todo o funcionamento
e controle do satélite é de responsabilidade do
subsistema de alimentação e energia do satélite.
Trata-se de um dos subsistemas mais importantes na arquitetura de funcionamento com o principal objetivo de coletar e transformar a energia
solar, por meio de um conjunto (array) de células
solares, em energia elétrica distribuindo-a para
os outros subsistemas do satélite.
É interessante ressaltar que o subsistema
de energia-alimentação também é composto por
um banco de baterias que fornecem energia em
períodos de eclipse, situações de emergência e
no próprio momento de lançamento (no qual as
células solares ainda não estão em operação).
Ainda assim, a fonte de energia predominante em
um sistema de satélite é a do tipo solar dada as
condições favoráveis devido à relativa proximidade do sol. Para termos uma ideia, a incidência de
radiação solar no satélite possui densidade de potência média com valores em torno de 1.4 kW/m2.
Assim, dependendo da eficiência das células solares (que cai com o passar do tempo) é possível
estimar as condições de geração de energia do
satélite dentro do seu período de vida útil.
Uma reserva de combustível e energia fica
sempre armazenada para ser utilizada no final da
operação do satélite a fim de retirá-lo da órbita
e executar as manobras e ações de finalização
de operação do satélite. Dependendo da aplicação-missão do satélite os requisitos de potência
podem variar de algumas centenas de watts até
dezenas de quilowatts.
Os satélites com formatos cilíndricos (estabilização rotacional) utilizam painéis solares neste formato e são desenvolvidos com mais células
solares quando comparados com os satélites de
estabilização com três eixos. De fato, os satélites
Anotações
projetados com os três eixos de sustentação utilizam painéis solares planos dispostos nos eixos de estrutura (que podem ser rotacionados)
podendo alcançar uma área de exposição para
radiação maior. Isso significa que o projeto de estrutura, o formato e os tipos de componentes que
compõem o subsistema de energia são projetados à luz da aplicação do satélite sempre visando
a máxima eficiência na conversão de energia.
O princípio de operação de uma célula solar é baseado no efeito fotovoltaico. O efeito fotovoltaico consiste na geração de um potencial
elétrico em um circuito retratado por uma junção
P-N quando esta é exposta à radiação solar. A Figura 31 mostra o princípio conceitual por trás do
efeito fotovoltaico. A luz solar incidente na célula
fotovoltaica é composta por fótons ou partículas
de energia solar as quais são dotadas de energia.
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
57
Figura 31 - Conceitos sobre o fenômeno – efeito fotovoltaico.
Ao incidir sobre a célula, essa energia pode
ser absorvida, refletida ou até mesmo atravessar a
célula por meio da superfície de contato. Isso significa que pode ocorrer uma reflexão (a radiação
é refletida pela superfície), uma refração (a radiação atravessa a superfície e o material) ou uma
absorção (a radiação penetra na superfície, mas
não sai do material). Neste sentido, o fenômeno
da célula fotovoltaica consiste na transferência de
energia do fóton incidente para os elétrons que
compõem a camada N da junção P-N (material
semicondutor) da célula fotovoltaica levando-os
ao estado de condução (banda de condução). O
resultado é um movimento de elétrons no sentido N da junção e outro movimento de lacunas no
Anotações
sentido P da junção. Este movimento de cargas
origina um campo elétrico na junção P-N em oposição ao campo original da junção estabelecendo
um potencial elétrico entre os pontos do material
semicondutor. Esta polarização estabelece um
ordenamento dos elétrons resultando em uma
corrente elétrica que pode circular por um circuito
elétrico (trata-se de um efeito muito interessante).
58
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
2.2.1.4.1. Exemplo – Subsistema de Energia Solar
Pressuponha um caso de um satélite baseado no
método de estabilização rotacional (spin stabilization method) em órbita geoestacionária. Nosso
desafio não seria projetar o subsistema de energia deste satélite (uma vez este desafio requer
uma análise e estudos mais complexos sobre os
fenômenos de energia no espaço), mas sim estimar o dimensionamento de células para compor um painel solar que atenda a um requisito de
energia do projeto do satélite.
Assim, é necessário que o subsistema de
energia seja capaz de gerar 2.0 kilowatts (2.000
watts) de energia a partir das células solares com
o objetivo de alimentar os circuitos de acionamento e controle do subsistema de propulsão do
satélite. Considere que o fluxo solar que atinge
perpendicularmente as placas solares tenha densidade (no pior dos casos) de aproximadamente
1.250 watts/m2. A área de cada célula solar é de
4 cm2 e a eficiência média de conversão das células solares (incluindo perdas nas conexões) é
de aproximadamente 15%. Qual seria o número
de células solares necessárias (estimação) para
compor os painéis solares do subsistema de
energia do satélite?
Solução:
–– O primeiro ponto seria relacionar as variáveis de projeto com a expressão que
define a potência gerada pelas células solares, de acordo com a seguinte
equação:
Pgerada = φ × n × s ×η
Pgerada → Potência a ser gerada pelo conjunto de células solares
φ → Fluxo solar (densidade) normal ao conjunto (array) de células solares (W/m 2 )
n → Número de células solares
(2.1)
s → Área de superfície de cada célula solar (m 2 )
η → Eficiência de conversão de cada célula solar
Neste sentido, é possível estabelecer, analisar e planejar ações que podem ser tomadas no
planejamento de projeto do subsistema de energia para maximizar a potência gerada pelo satélite. A eficiência de conversão energética, o número
e o tamanho-área das células solares são fatores
que levam ao aumento direto da geração de energia solar do sistema. No entanto, questões como
Anotações
o espaço necessário bem como o controle de estabilidade de grandes estruturas requerem ainda
mais energia do sistema resultando em diversas
relações de compromisso no desenvolvimento de
interconexões entre os diversos subsistemas do
satélite com o subsistema de energia.
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
59
Com isso, a partir do requisito de potência
imposto (2.000 watts), é possível calcular o número de células (n) necessárias para obtenção da
potência gerada requerida de acordo com:
n
=
Pgerada
2.000 ( W )
=
= 26.666, 67 células solares
φ × s ×η 1.250 W/m 2 × 4 × 10−4 m 2 × 0.15
(
)
( )
Por definição, um painel solar é retratado por
um conjunto de conexões série-paralelo de várias
células solares. A potência gerada (potencial de
tensão e corrente) de uma única célula solar não
é suficiente para abastecer os componentes dos
blocos funcionais dos subsistemas do satélite. O
arranjo série-paralelo das células solares (compondo o painel solar) é a solução para atingir a
capacidade de fornecimento de energia requerida
pelo satélite. Logo, são necessárias mais de 26.000
células solares com eficiência média de conversão
de 15% para gerar uma potência de 2 kilowatts.
Neste ponto, é importante comentar sobre o
tipo de satélite (referente ao método de estabilização) e sua influência na quantidade de células solares do subsistema de energia solar. No caso do
satélite do tipo spin-stabilization tem-se o painel
solar cilíndrico enquanto o satélite de três eixos
utiliza os painéis planos (retangulares) para disposição das células solares. Fica evidente que cada
um dos tipos de satélite possui suas vantagens e
desvantagens conforme mostra a Figura 32.
Figura 32 - Vantagens e desvantagens dos satélites: Três Eixos e Spin.
Anotações
(2.2)
60
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
A principal vantagem do satélite de três eixos reside nos mecanismos de controle para rotação dos painéis solares planos com o objetivo de
capturar o máximo de energia solar refletindo em
maior potencial de conversão energético e distribuição de eletricidade interna no satélite. Em contrapartida, devido ao maior tempo de exposição à
radiação, os painéis solares operam com elevada
temperatura e a eficiência de conversão das células se reduz com o tempo de operação-exposição.
O satélite do tipo rotacional (Spin-Stabilization) possui uma particularidade que se apresenta ao mesmo tempo como uma vantagem e
uma desvantagem. Devido à própria natureza de
funcionamento do eixo central do satélite spin,
somente um terço das células solares do painel
cilíndrico ficam totalmente expostas à radiação
solar. Isso ocorre uma vez que o satélite spin
rotaciona como uma dada taxa (revoluções por
minuto). Neste sentido, são necessárias mais células solares para atingir um determinado requisito de energia o que pode elevar o tamanho e
massa do satélite. Em contrapartida, o fato de as
células solares estarem expostas a temperaturas
mais elevadas (voltadas para o sol) e temperaturas mais baixas (voltadas para o lado oposto à
radiação) reflete em um melhor desempenho, em
termos de eficiência energética, quando comparado com o satélite de três eixos.
Assim, com a disposição das células solares no corpo cilíndrico do satélite Spin, a área do
corpo cilíndrico (Ac) é proporcional ao diâmetro
D e ao comprimento do corpo L vezes a constante π. Enquanto a área do painel retangular do
satélite de três eixos é dada pelo produto entre o
comprimento e largura do retângulo (nota-se que
o desmembramento cilíndrico origina um retângulo) de acordo com a seguinte análise:
Acilindro = π × D × L (Área do corpo cilíndrico do satélite spin)
Apainel= D × L (Área de um painel solar retangular do satélite de três eixos)
A
π × D× L
= π
Relação entre Áreas → cilindro=
Apainel
D× L
(2.3)
Logo, a relação entre as áreas é igual á
constante π. Isso significa que a área dos painéis
solares requerida para o satélite spin é π vezes
maior quando comparada com a área requerida
para o caso do satélite de três eixos. Para o satélite Spin, o número total de células que capturam
radiação solar é igual ao número total de células
solares dividido pela constante π.
Número de Células requeridas (totais) = 26.666,67 × π =
83.775 células totais
Anotações
(2.4)
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
61
2.2.1.5. Subsistema de Rastreamento, Telemetria e Comando (Monitoramento)
O subsistema TTC (Tracking, Telemetry and
Command) monitora e controla o satélite durante
todo o seu período de operação. O subsistema
de rastreamento (Tracking) utiliza as informações
de ângulos, distância e velocidade para determinar precisamente a posição do satélite acompanhando-o em sua trajetória no plano orbital
(órbita). O subsistema de telemetria (Telemetry)
coleta as informações relacionadas às condições
de operação (status) sobre a “saúde” técnica do
satélite, codifica tais informações e transmite para
o centro mestre de controle (MCC) do segmento
de controle. Enquanto o subsistema de comando
recebe, interpreta e envia comandos configurando as funções do satélite de forma remota.
A Figura 33 mostra o diagrama em blocos
da arquitetura do subsistema TT&C que caracteriza o funcionamento do segmento espacial.
Figura 33 - Diagrama da arquitetura do subsistema de rastreamento, telemetria e comando.
Anotações
62
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
É possível notar que a estação de controle é
composta por uma seção de recepção de sinais
retratada pelo subsistema de recepção de telemetria e rastreamento e uma seção de transmissão a
qual é responsável por enviar sinais de controle e
comando ao satélite. Por isso existem os enlaces
de subida e descida de controle do satélite.
Os sinais transmitidos pelo satélite por meio
das antenas TT&C (downlink de controle) revelam
as medidas de todo o status de operação do satélite. A partir dessas informações, os subsistemas
de telemetria-recepção e rastreamento processam tais sinais (detectando-os) repassando-as
para o centro mestre de controle TT&C. Neste
ponto ocorre a análise-processamento da operação do sistema de satélite resultando em ações
de configuração e comandos que são enviados
pelo subsistema de transmissão de controle.
Com isso, é possível perceber que a eficiência no
processo de comando e controle do satélite depende do subsistema de telecomunicações utilizado no enlace de controle, do correto posicionamento do satélite bem como do apontamento
das antenas que compõem o subsistema TT&C
e principalmente do processamento das medidas
da estação terrena para o controle de órbita e altitude do satélite.
Assim, de forma mais específica, é possível
relatar os objetivos e funções de cada elemento
do subsistema TT&C:
• Rastreamento (Tracking): refere-se a
determinação da órbita, da posição e do
movimento do satélite no plano orbital
atual. A função de rastreamento pode
ser implementada com várias técnicas
e mecanismos que envolvem sinais de
controle denominados beacon signals
enviados pelo satélite e processados
na estação terrena de controle. Medidas angulares que podem ser feitas
Anotações
por sensores do próprio satélite e nas
estações terrenas são muito utilizadas
para determinar a posição do satélite na
órbita. A distância do satélite pode ser
estimada por intermédio da análise dos
atrasos temporais de sinais-pulsos que
são enviados pelo satélite e recebidos
na estação terrena de controle.
• Telemetria (Telemetry): refere-se com o
processo de captura – coleta de dados
dos sensores distribuídos no satélite e
a retransmissão dessas medidas para a
estação terrena de controle. Especificamente, os níveis de tensão/corrente medidos eletronicamente pelos sensores
refletem as condições do subsistema de
alimentação, a temperatura de subsistemas (fundamental para o funcionamento
do satélite), entre outras condições em
pontos críticos do sistema.
• Comando (Command): é interpretado
como a função objetivo do processamento de telemetria. Comandos (sinais
de controle) são enviados para o satélite
a fim de configurar toda a operação do
satélite ponderada pelas análises dos
sinais de telemetria. Alterações e configurações nos subsistemas de controle
de órbita e altitude, no apontamento das
antenas do satélite bem como nos modos de operação da plataforma e payload são tipos de ações que são enviadas
pela estação de controle através da função de comando e controle mestre.
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
2.2.1.6. Subsistema de Controle de Órbita e Altitude
É sabido que várias forças externas (força gravitacional da Terra, do Sol e de outras estrelas) podem
atuar na plataforma do satélite movendo o próprio
satélite e suas antenas da posição ótima orbital e
de apontamento. Assim, o subsistema de controle
de altitude pode ser interpretado como parte do
subsistema TT&C, pois combina uma série de elementos que fazem o sensoriamento de qualquer
mudança no alinhamento do satélite e no apontamento de suas antenas. Com isso, os blocos
funcionais que compõem os subsistemas TT&C e
de controle de órbita e altitude estão presentes no
satélite e na estação terrena de controle.
Estes blocos funcionais que são, na verdade, as técnicas e mecanismos (circuitos) implementados para realizar as funções de controle do
satélite (altitude – órbita – rastreamento – telemetria) estão também presentes em diferentes tipos
de veículos espaciais como foguetes teleguiados,
espaçonaves e sondas espaciais para exploração
do espaço. O que muda nesse cenário são os
objetivos específicos de aplicação e os requisitos
de projeto resultando em blocos funcionais mais
ou menos adequados a certas aplicações. Satélites de Comunicações utilizam um subsistema de
controle de altitude mais autônomo (interno) que
pode operar em conjunto com o centro de controle TT&C em situações críticas de operação.
Conceitualmente, a altitude de um satélite é
determinada pela sua orientação em relação aos
eixos de estrutura e os eixos de um plano de referência de coordenadas. Especificamente, temse um sistema local de coordenadas (retratado
na literatura) formado pelos eixos YAW – PITCH
– ROLL conforme mostra a Figura 34.
Anotações
63
64
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
Figura 34 - Conceitos sobre o sistema local de coordenadas para controle de altitude de satélites GEO.
Este sistema de coordenadas é centrado no
centro de massa do próprio satélite. O eixo YAW
é caracterizado por apontar na direção do centro
de massa da Terra. O eixo ROLL está contido no
plano orbital (perpendicular ao eixo YAW) e aponta na direção de velocidade do satélite. Enquanto o eixo PITCH é perpendicular aos outros dois
eixos (YAW e ROLL) e tem direção complementar
aos outros eixos a fim de formar um sistema de
coordenadas regular (para o caso dos satélites
GEO, o eixo PITCH aponta para o sul do satélite).
A altitude de um satélite é representada
pelos ângulos de rotação entre esses eixos do
sistema local de coordenadas (YAW – PITCH –
ROLL) e de um sistema fixo de coordenadas.
Anotações
Assim, um dos objetivos do controle de altitude consiste em manter os eixos mecânicos alinhados corretamente com o sistema local de
coordenadas. Isso significa que existe um range
de medida para rotação angular de cada eixo
(±0.05º Roll ou ±0.2º Yaw, por exemplo) refletindo a precisão da orientação do corpo do satélite. Com o propósito de medir, de forma precisa,
as angulações entre os eixos do sistema local
de coordenadas tem-se uma série de sensores
de atuação posicionados no corpo do satélite
para que o controle de altitude seja estabelecido. A Figura 35 mostra um diagrama conceitual
de funcionamento do subsistema de controle de
altitude de um satélite de comunicação.
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
65
Figura 35 - Diagrama em blocos conceitual do subsistema de controle de altitude.
Os sensores de apontamento angular conseguem medir o ângulo de apontamento em
relação a alguma referência possuindo a habilidade de detectar mudanças entre dois eixos.
Neste ponto, é possível perceber que a acurácia
Anotações
e precisão dos sensores influenciam diretamente
na eficiência do processo de controle de altitude
do satélite. No Loop de controle de altitude, os sinais provenientes dos sensores de apontamento
são interpretados por sensores eletrônicos a fim
66
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
de compor uma saída calibrada para o processamento central de controle de altitude (que é um
sistema de processamento-computacional interno no satélite). Esse controle central detém a inteligência de análise para interpretar o conjunto de
sinais dos sensores de controle e ativar/desativar
os motores acoplados nos eixos de estrutura do
satélite. Neste ponto, têm-se os avanços de desenvolvimento de controle robótico e mecânico
para que as mais difíceis manobras de movimentação e rotação sejam realizadas para trabalhar a
estrutura do satélite de forma precisa e eficiente.
Pequenas mudanças de orientação do corpo do
satélite, por exemplo, são realizadas com controle avançado das velocidades envolvidas no movimento dos motores do sistema.
2.2.1.6.1. Sensores para Controle de Altitude
Os sensores de medida e atuação do controle de
altitude do satélite conseguem medir a orientação
dos eixos do satélite em função de uma referência
externa – como o Sol, a Terra entre outras estrelas
e até mesmo a progressão destas mudanças de
orientação com o tempo. A principal característica de um sensor é a sua precisão de medida a
qual impacta nas ações de alinhamento para o
controle de altitude do satélite.
• Sensores Solares: Estes tipos de sensores operam de forma similar às células solares uma vez que produzem diretamente
um sinal elétrico a partir da radiação solar.
A diferença é que estes sensores conseguem medir o ângulo entre a sua base
de sustentação e a direção de incidência
de luz. Essa informação angular é usada
como base para a atuação dos motores na
busca de equilíbrio dos eixos do satélite.
• Sensores da Terra: O planeta Terra e sua
atmosfera são interpretados no espectro
infravermelho (sua radiação) como um
corpo negro esférico com uma temperatura equivalente a 255 Kelvin. Visualizando o planeta Terra do espaço é muito
Anotações
interessante perceber que a imagem do
planeta contrasta significativamente com
o plano de fundo sideral (temperatura de
4 Kelvin) no domínio do espectro infravermelho. Isso significa que medir a radiação infravermelha proveniente da Terra permite identificar o seu contorno na
comparação com a radiação do espaço
sideral. Essa informação também é usada pelo subsistema de controle de altitude para estabilizar o satélite.
• Sensores de Estrelas: Estes tipos de
sensores se baseiam no fato de que é
possível comparar mapas de estrelas
capturados (pelos sensores) com mapas de referência observando as posições relativas entre as estrelas. Estes
sensores estão muitas vezes acoplados
a sistemas de processamento digitais de
sinais que utilizam algoritmos de rastreamento e reconhecimento de padrões
de mapas estelares. Por intermédio das
comparações e dos algoritmos torna-se
possível estimar a altitude e a velocidade angular dos satélites em diferentes
pontos do plano orbital.
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
67
2.2.2. Sistema Payload do Satélite
O sistema payload de um satélite constitui uma
de suas partes mais importantes. Enquanto o
sistema plataforma consiste em toda estrutura
funcional de estabilidade do satélite o payload
realiza suas principais tarefas de missão espacial. É possível utilizar uma analogia retratando o
payload como o cérebro do satélite constituindo
uma unidade de processamento central. O sistema payload é composto pelos blocos funcionais
(circuitos) que realizam os objetivos de missão
do satélite. De forma mais específica, os tipos de
equipamentos e subsistemas internos do sistema
payload dependem do tipo de aplicação-missão
do satélite. No caso dos satélites de comunicação a estrutura básica que caracteriza o payload
de um satélite é o seu transponder.
A responsabilidade do payload do satélite é
realizar (por intermédio dos transponders) a recepção, amplificação e retransmissão dos sinais
provenientes das estações terrenas para outras
partes da Terra atendendo a uma área de cobertura. O estudo do funcionamento do sistema de
transponders de um satélite deve ser ponderado
pela análise inicial do funcionamento de um sistema de comunicação via satélite evidenciando
a responsabilidade do payload neste sistema. A
Figura 36 mostra um diagrama de um sistema de
comunicação digital via satélite retratando o sistema plataforma e o sistema payload do satélite.
Figura 36 - Diagrama em blocos conceitual de um sistema de comunicação via satélite.
Anotações
68
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
A responsabilidade da estação terrena de
transmissão é realizar uma série de processamentos com os sinais de informação (provenientes de
uma fonte de informação) de tal forma a compor
um serviço de transmissão. Especificamente, existem vários processos dentro da estação terrena
que possuem a finalidade de gerar um sinal robusto aos efeitos do canal de comunicação que interliga a estação terrena de transmissão ao satélite. De
igual importância, são utilizadas técnicas de codificação e transmissão de sinais para que a ocupação de largura de faixa seja a mínima possível.
Neste ponto já é possível perceber que a
transmissão via satélite envolve a alocação de um
recurso (largura de banda no satélite) o qual deve
ser utilizado da melhor maneira possível (maximizando a eficiência na utilização dos recursos nos
projetos de sistemas de comunicações). Ao mesmo tempo, as características de configuração dos
processos envolvidos resultam em um desempenho para o sistema de comunicação via satélite
de subida (uplink).
Com isso, os sinais recebidos pelo satélite
são detectados, amplificados e retransmitidos
em uma frequência adequada para o processo
de downlink constituindo outro sistema-enlace
de comunicação. O equipamento (principal) responsável por realizar esse processo de recepção
– transmissão dos sinais no satélite é o transponder. Portanto, o bloco funcional transponder em
um satélite de comunicação pode ser interpretado como uma série de equipamentos-dispositivos que realizam a interligação (link) dentro do
satélite levando o sinal recebido no uplink para o
circuito de downlink.
O sinal de downlink é retransmitido para
uma estação terrena, um receptor DTH (Direct-toHome) ou até mesmo um receptor móvel e possui
nível muito pequeno em função das degradações
com as grandes distâncias do canal de comunicação. Uma série de processamentos duais à
Anotações
estação terrena de transmissão são implementados pela estação terrena de recepção com objetivo de recuperar os sinais de informação. Logo, o
sucesso na recuperação dos dados pelo sistema
de recepção depende da eficiência do processo
de retransmissão do transponder.
Existem dois tipos de transponders que
podem ser utilizados em sistemas de satélite de
comunicações: Os Transponders Transparentes
(Bent Pipes) e os Transponders Regenerativos.
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
69
2.2.2.1. Sistema – Transponder Transparente Bent Pipe
A Figura 37 mostra o diagrama em blocos do sistema payload Bent Pipe com as principais etapas
envolvidas no processo de retransmissão de sinais evidenciando os transponders transparentes
do satélite.
Figura 37 - Diagrama em blocos conceitual do sistema payload Bent Pipe de um satélite comunicação.
Os transponders do tipo Bent Pipe processam os sinais de uplink alterando somente duas
características essenciais dos sinais de entrada:
Amplitude e Frequência. Em um primeiro momento, é possível intuir que a conversão de frequência entre Uplink e Downlink possibilita o desacoplamento entre a entrada e a saída de sinais
Anotações
de um satélite de comunicação. De forma equivalente, e devido aos elevados níveis de potência utilizados pelos satélites, pode-se pressupor
que os sinais retransmitidos possam ser captados pela antena de recepção do satélite (caracterizando uma realimentação). Nesta situação, a
canalização de frequência adequada para Uplink
70
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
e Downlink em conjunto com a utilização de sistemas de filtragem robustos e controle de níveis
de sinal garante a sintonia eficiente de Uplink e
Downlink. O objetivo seria aumentar a isolação do
sistema de retransmissão do satélite bem como a
sua imunidade às interferências. Assim, a primeira etapa que compõe o payload de um satélite é
o subsistema de filtragem de entrada para Uplink.
Após a filtragem do sinal de Uplink, tem-se
um processo de amplificação de baixa figura de
ruído – LNA (Low Noise Amplifier) (esse conceito
será abordado mais adiante). De fato, o sinal de
Uplink proveniente da estação terrena de transmissão está corrompido com inúmeros efeitos
advindos do canal de comunicação que interliga
a estação terrena ao satélite. Além disso, já é possível adiantar que os próprios circuitos eletrônicos que compõem o satélite também são fontes
de ruído que tornam o sinal ainda mais ruidoso.
O problema surge pelo fato de que o sinal
de Uplink possui nível muito reduzido (na faixa
de picoWatts) sendo susceptível aos efeitos dos
ruídos. O próprio processo de recepção de sinais em um sistema de comunicação digital é
dependente das ações de um tipo de ruído onipresente em sistemas eletrônicos – conhecido
como ruído AWGN (Additive White Gaussian Noise). Isso demanda certa qualidade no desenvolvimento do LNA que vai a bordo do payload Bent
Pipe para que a relação sinal ruído (SNR – Signal-to-Noise Ratio) seja a mais elevada possível.
No entanto, além dos amplificadores realizarem
o processo de amplificação (elevando o nível do
sinal de entrada) – amplifica-se também o ruído
presente no sinal de Uplink. Além disso, o próprio circuito de amplificação eletrônica também
gera seu próprio ruído interno de conturbação.
Neste sentido, o LNA é um dispositivo desenvolvido para amplificar o sinal de Uplink a níveis
aceitáveis pelos transponders sem adicionar ruídos de elevada amplitude.
Anotações
A conversão de frequência para retransmissão dos sinais é feita por intermédio do Mixer retratando a etapa de Downconverter. O processo
de Downconverter é o batimento de frequência –
translação espectral do sinal de entrada de Uplink
para uma frequência adequada ao Downlink. A
conversão de frequência poderia ser o primeiro
processo do Front End do satélite, mas as perdas
no Mixer (e a sua alta figura de ruído) podem fazer com que o sinal após o Downconverter esteja
muito degradado em termos de qualidade (SNR).
Por isso, é essencial que o LNA atue em conjunto
com o sistema de filtragem preparando o sinal de
Uplink para o processo de Downconverter atendendo aos requisitos de temperatura equivalente
de ruído do sistema (iremos estudar esse conceito mais adiante).
Seguido o processo de Downconverter,
tomando o ganho de potência inicial fornecido
pelo LNA e considerando as perdas intrínsecas
no Mixer, torna-se necessário realizar o processo de amplificação principal para retransmissão.
Dependendo de fatores como a frequência de
operação para Uplink e Downlink, torna-se difícil
alcançar elevados ganhos de potência para Downlink devido às limitações tecnológicas dos circuitos de amplificação do próprio satélite. Nestes
casos, a etapa de Downconverter pode ser desenvolvida como uma forma de dupla conversão
utilizando uma frequência intermediária menor do
que a frequência de Downlink.
A Figura 38 mostra os dois esquemas de
conversão na recepção dos sinais de Uplink:
Conversão única de frequência e Conversão dupla de frequência.
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
71
Figura 38 - Esquemas de conversão (direta ou dupla) para Downconverter dos sinais de Uplink.
O Front End de recepção com conversão única realiza a etapa de Downconverter direto para
a frequência de Downlink entregando os sinais
de RF para as etapas seguintes do payload. Já
no esquema de conversão dupla de frequência,
o primeiro Mixer realiza uma translação espectral
para uma frequência intermediária seguido de um
primeiro estágio de amplificação intermediário.
Uma seção de Upconverter atua transladando o
sinal de IF amplificado para a frequência desejada de Downlink encaminhando-o para os próximos estágios de amplificação do satélite.
Do ponto de vista de retransmissão, em virtude da instabilidade dos amplificadores de alta
potência, é mais interessante realizar o processo
de amplificação de forma paralela dividindo o ganho total de potência do sistema em mais de uma
unidade amplificadora operando com sinais de
entrada diferentes em frequências diferentes. Neste sentido, toda a largura de banda é separada em
Anotações
canais por intermédio de um banco de filtros (RF)
de radiofrequência implementados como um multiplexador de entrada – IMUX (Input Multiplexer).
Logo, o objetivo do IMUX é realizar uma subcanalização do sistema de retransmissão do satélite.
O termo Multiplexação é usado neste âmbito designando aos equipamentos OMUX (Output
Multiplexer) e IMUX as funcionalidades de combinação de sinais de diferentes frequências de diferentes fontes em único sinal de saída ou encaminhamento (roteamento-análise) de um sinal único
em diferentes saídas de acordo com suas frequências. Cada filtro passa-faixa do IMUX é projetado para operar com a largura de banda de um determinado canal do sistema de subcanalização.
O sinal de saída de cada filtro de RF do IMUX é
amplificado por diferentes HPA (High Power Amplifiers) ponderados por Drivers (pequenos circuitos pré-amplificadores) utilizados para excitar de
forma adequada os amplificadores HPA.
72
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
2.2.2.1.1. Subsistema de Amplificação dos Satélites de Comunicação
Os amplificadores utilizados para realizar o processo principal de amplificação (HPA) são os
tubos-guias de onda de amplificação TWTA
(Travelling Wave Tube Amplifiers). Assim, os eletrônicos sólido-ativos (circuitos eletrônicos, integrados, chips) os quais dominam a etapa de amplificação na indústria de dispositivos móveis são
utilizados em situações de amplificação com potências relativamente baixas enquanto os guias
de onda ativos se destacam na etapa de amplificação de alta potência do segmento espacial.
A Figura 39 mostra um diagrama simplificado do funcionamento de um tubo-guia de ondas ativo para amplificação de sinais (TWTA) dos
transponders de um satélite de comunicação.
Existem três componentes principais na estrutura
do amplificador TWTA – que são o emissor-gatilho de elétrons, o circuito-estrutura de RF para
atraso de onda e o elemento coletor.
Figura 39 - Diagrama simplificado de funcionamento do TWTA.
Anotações
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
O TWT (Travelling Wave Tube) constitui toda
a estrutura do tubo-guia de ondas em si enquanto o TWTA aparece como o circuito completo de
amplificação de alta potência baseado no tuboguia de ondas associado a uma fonte de energia.
O TWT é representado fisicamente por um tubo
com características lineares no vácuo que é atravessado por um feixe eletrônico estreito o qual é
guiado por um campo magnético.
Não é o propósito aqui aprofundar em detalhes no pensamento-design por trás da modelagem de funcionamento dos TWTAs, mas sim destacar a elegância, a sofisticação e a complexidade
desta tecnologia no alcance de um processo de
amplificação eficiente e confiável. De fato, o que
ocorre é que tal amplificação é alcançada por intermédio da transferência de energia do feixe de
elétrons para o sinal de micro-ondas (onda guiada) que entra no tubo (Input RF → Output RF). O
feixe eletrônico é gerado por um gatilho de interação e combinação entre a aplicação de um potencial no catodo, um anodo e a geração de calor.
É possível visualizar na Figura 39 que o
calor aumenta a temperatura do catodo com o
objetivo de provocar a emissão de elétrons presentes no material do catodo. Tal como nos tubos
eletrônicos das televisões, o catodo determina a
eficiência de emissão eletrônica com certo formato de feixe. Os elétrons provenientes do aquecimento do catodo são acelerados para o anodo o
qual possui um alto potencial positivo em relação
ao catodo proporcionando a formação do feixe
de elétrons que passa através da estrutura aberta
entre as placas de anodo. Alguns tipos de gatilhos possuem uma grade (alimentada com um
potencial negativo) entre o catodo e o anodo com
a finalidade de controlar a corrente do catodo e
por consequência o feixe de elétrons. Após o gatilho catodo-anodo tem-se uma estrutura guiada
em espiral (helix) na qual ocorre a interação entre
o feixe eletrônico (emitido) e a onda guiada pelo
Anotações
73
TWTA. O feixe de elétrons é guiado dentro da estrutura espiral até o coletor que é mantido com
potencial elevado em relação ao catodo.
O sinal parcialmente amplificado – filtrado
entra no circuito de um transponder e é submetido ao processamento TWTA interagindo com o
feixe de elétrons do tubo-guia de onda (TWT). O
sinal de entrada é, de fato, pura energia de microondas (ondas eletromagnéticas) e viaja no espaço na velocidade da luz (c = 3x108 ms) a qual é
muito maior do que a velocidade dos elétrons do
feixe eletrônico. Devido à espiral interna do TWTA,
as micro-ondas que se propagam e atravessam
o tubo tem a sua velocidade axial (eixo) reduzida comparando-se com a velocidade do feixe de
elétrons. Este requisito é fundamental para que
o fenômeno de transferência de energia do feixe
eletrônico ocorra para a onda de RF que entra no
dispositivo. É muito interessante perceber que a
interação entre o feixe de elétrons e a onda de
RF toma a forma de uma “Modulação de Velocidade” (Velocity Modulation), pois alguns elétrons
são acelerados mais enquanto outros são acelerados menos. Em outras palavras, o feixe eletrônico é modulado pelo sinal de RF resultando em
um agrupamento focal de elétrons no interior da
espiral formando uma verdadeira rede de transferência de energia que é usada para alcançar a
amplificação do sinal.
É justamente essa energia cinética (proveniente do movimento dos elétrons) (por meio do
agrupamento focal dos elétrons) que é transferida para o sinal de micro-ondas. Isso só se torna
possível devido à estrutura de atraso da onda fazendo com que a velocidade da onda de RF seja
equivalente à velocidade do feixe de elétrons.
Atenuadores são utilizados no centro da espiral
a fim de controlar e processo de amplificação
tornando o dispositivo mais estável enquanto os
anéis magnéticos permanentes conformam (estritamente) o feixe eletrônico dentro da espiral
74
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
do TWTA. O coletor, localizado à direita do amplificador tem uma função muito importante no
sistema quanto à própria eficiência de amplificação do TWTA. Baseado no pressuposto de que
o objetivo de amplificação é alcançado com a
transferência de energia cinética do feixe para o
sinal de RF, pode-se intuir que a velocidade dos
elétrons se reduz ao longo da direção longitudinal do tubo em direção ao coletor. No entanto,
ao serem atraídos pelo coletor (com elevado potencial positivo) os elétrons ainda possuem alguma energia acumulada (menor do que a energia
inicial do gatilho-disparo). Uma operação de amplificação eficiente é alcançada se a velocidade
dos elétrons antes de atingirem o coletor tenha
valor próximo de zero (significa que toda a energia foi transferida para o sinal de RF). Com isso,
placas com potencial negativo são colocadas em
certos estágios do coletor para que os elétrons
tenham maior dificuldade em alcançar o estágio
final do coletor e, por consequência, transfiram
mais energia para o sinal de RF aumentando a
eficiência de amplificação [3] [4].
Neste sentido, a amplificação ativa do TWTA
é, de fato, um fenômeno eletromagnético, pois
a energia cinética de movimento dos elétrons
do feixe eletrônico é transferida para a onda de
micro-ondas conforme a propagação do sinal ao
longo do TWT retratando um fenômeno elegante
e digno de estudos em todo o campo de RF.
Os amplificadores de estado sólido – SSPAs
(Solid State Power Amplifiers) entram no contexto
combinando suas potencialidades com o sistema
TWTA. Os SSPAs foram introduzidos no âmbito
de comunicações via satélite em meados de 1980
com o objetivo de promover a coexistência entre
diferentes tecnologias de amplificação nas plataformas espaciais. Os sistemas SSPAs utilizam
transistores de efeito de campo para realizar a amplificação operando com potências relativamente
baixas (entre 5 W e 10 W). Ganhos de potência
mais elevados podem ser obtidos conectando os
estágios transistorizados formando cascatas de
amplificação. Diferentemente de um TWTA, um
SSPA não é um único dispositivo e sim uma associação transistorizada para amplificação de sinais
em cascata conforme mostra a Figura 40.
Figura 40 - Diagrama simplificado de funcionamento dos amplificadores SSPAs.
Anotações
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
Os amplificadores transistorizados-ativos são
os elementos-circuitos responsáveis por realizar a amplificação do sinal de entrada do SSPA.
Os circuladores são projetados e colocados no
estágio de amplificação com o intuito de isolar o SSPA protegendo-o dentro do sistema de
amplificação com outros circuitos do sistema
de comunicação do satélite. Assim, qualquer
energia de micro-ondas refletida no sistema
de amplificação é direcionada para uma carga
acoplada ao circulador.
A alta linearidade e a relação de massa-potência dos sistemas de amplificação SSPAs são
pontos atrativos para os satélites de comunicações quando comparados com os amplificadores em tubo TWTAs. Muitos satélites de
2.2.2.2. Sistema – Transponder Regenerativo
Os transponders regenerativos são caracterizados por processarem os sinais de Uplink alterando suas características para a posterior retransmissão via Downlink. De forma mais específica,
tem-se um processamento interno em banda
base (onboard baseband processing) para tratamento e regeneração dos sinais recebidos via
Uplink por meio do front end do satélite. O objetivo principal de um sistema com payload regenerativo é alcançar um melhor desempenho de
operação no estabelecimento dos enlaces de
Downlink para as estações terrenas. A Figura 41
mostra um diagrama geral evidenciando a etapa
de processamento onboard no payload de um satélite de comunicação.
Anotações
75
comunicação em banda C operam com sistemas SSPAs. No entanto, a eficiência de amplificação dos SSPAs no modo de operação linear
é relativamente baixa (por volta de 30% a 40%)
quando comparada com a eficiência dos tubos
TWTAs (70%) [3] [4]. Ambas as tecnologias são
alvos de intensa pesquisa que culminam no aumento de eficiência na busca por uma relação
custo-benefício na qual a questão de gasto
energético se torna fundamental. Ao mesmo
tempo, a demanda por mais capacidade nos
canais-transponders e maior potência dos satélites está cada vez mais presente e abrindo, de
alguma forma, espaço competitivo e de combinação entre as tecnologias SSPA e TWTA.
76
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
Figura 41 - Diagrama simplificado de funcionamento de um transponder regenerativo.
É possível observar que existe um processador digitais de sinais interno ao payload do satélite
que pode realizar processos de tratamento de sinais
com finalidades de codificação, correção de erros,
regeneração, reformatação e até mesmo roteamento de sinais em banda base. Logo, todos os avanços
e potencialidades das comunicações digitais são
transportados para dentro do payload regenerativo
expandindo suas características e funcionalidades.
Por intermédio de um banco de demoduladores digitais, o sinal de Uplink (já posto em frequência intermediária pelo front-end) é transladado
para banda base resultando em um fluxo digital
(bits) de informação em conjunto com sinais controle (dependendo das características de camada
física do sistema de comunicação digital). O sistema de processamento onboard processa o fluxo
digital e implementa funcionalidades de regeneração, além de codificações para melhorar o desempenho do sistema de comunicação como um
todo. Um banco de moduladores digitais forma
um sistema de transmissão para adequação dos
Anotações
sinais regenerados às características de transmissão de Downlink. Assim, em conjunto com o
sistema de modulação digital segue a seção de
Upconverter de sinais para translação do espectro dos sinais em banda base para a frequência
de Downlink (podendo fazer tal conversão com
estágios intermediários, por exemplo).
Neste sentido, os repetidores regenerativos
conseguem atingir melhor desempenho de qualidade no enlace quando comparados com os transponders bent pipes transparentes. A possibilidade
de regeneração e remodelação dos sinais resulta
em melhor desempenho do satélite do ponto de
vista de comunicação digital. Em contrapartida,
trata-se de um payload mais complexo envolvendo
circuitos digitais que devem estar suportados por
circuitos de monitoramento e controle para garantir
o sucesso da operação digital dentro do payload.
Logo, a implementação de um sistema regenerativo em um satélite deve ser justificada pelas vantagens apresentadas por essa abordagem e principalmente, pela aplicação-missão do satélite.
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
77
2.2.2.3. Técnicas de Comunicações Digitais em Sistemas de Satélite
Um dos pontos mais importantes no estudo dos
payloads em sistemas de comunicações via satélite consiste na análise das técnicas de comunicações digitais que são utilizadas no sistema de
processamento interno onboard do payload. Esses conceitos tratados nessa seção são o insumo
inicial para compreender as potencialidades que
existem nos padrões de transmissão de sinais via
satélite como os sistemas DVB-S/S2. Uma verdade é que as características avançadas desses
padrões de tecnologia via satélite (entre outros
exemplos como LTE-4G, Wi-Fi, WiMAX, ISDB-Tb)
só foram viabilizadas no âmbito dos sistemas de
comunicações quando a teoria de comunicação
digital foi desenvolvida e transportada para os
processadores digitais de sinais (da teoria de sinais e sistemas). Por isso, em um primeiro momento do curso, torna-se interessante ressaltar
a importância de duas definições: o conceito do
processo de modulação de sinais e a diferenciação das transmissões analógicas e digitais.
2.2.2.3.1. Fundamentos da Transmissão Digital
Definição
Sabe-se que, em essência, o processo de modulação de sinais consiste na translação do espectro
dos sinais que inicialmente estão em banda base
para banda passante. De forma dual, o processo
de demodulação (o qual ocorre no receptor) é retratado pela translação espectral dos sinais em
banda passante para banda base. Além disso, é
possível ressaltar que o transporte de informação
por canais de comunicação sem fio (como é o
caso dos enlaces de satélite) envolve a geração
estável de um sinal de onda portadora de alta frequência. Assim, no âmbito da transmissão analógica é importante buscar a seguinte definição:
A Transmissão Analógica transporta a informação por meio da variação contínua de algum
parâmetro do sinal transmitido (sinal de onda portadora).
Esse parâmetro citado na definição acima é
justamente alguma característica da onda portadora, como a sua fase, amplitude ou frequência,
por exemplo. Logo, embora se tratando de um
conceito inicial, é muito importante atentar que
a informação a ser transmitida pelo sistema de
comunicação está contida na variação destas características da onda portadora. É neste sentido
que a portadora “transporta” a informação.
Anotações
Esse conceito se torna diferente dentro do
contexto das comunicações digitais justamente
pela questão diferencial entre o mundo analógico
(contínuo) e o digital (discreto). Assim, é possível
definir o conceito de transmissão digital da seguinte forma:
Definição
78
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
A Transmissão Digital transporta ou representa a informação por meio de uma variação
discreta das características de um conjunto finito de formas de onda digitais.
É interessante notar que existe um conjunto (finito – que ambos Tx e Rx conhecem) de formas de onda digitais as quais serão geradas para
representar as informações digitais. De fato, uma
forma de onda digital (Digital Waveform) é um sinal
(forma de onda) que representa um símbolo digital. Neste ponto, a transmissão digital se diferencia
da transmissão analógica pela caracterização de
um alfabeto finito de símbolos digitais os quais são
representados por formas de onda digitais.
A Figura 42 mostra um sistema de Uplink
digital de satélite para transmissão dos símbolos
digitais que são gerados pelo transmissor digital.
Figura 42 - Diagrama de um sistema de comunicação digital via satélite.
Anotações
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
Especificamente, o bloco de fonte de informação é, de fato, o responsável pela geração das
informações referente à aplicação. É possível ter
fontes de informações digitais ou analógicas. Um
sistema de captação com câmeras em estúdio,
sinais de um sistema de telemetria e controle, sinais digitais com diversos serviços incluindo voz,
dados, vídeo, áudio e o escoamento de tráfego
de alguma rede de telecomunicações compõem
diversos exemplos que podem ser interpretados
como possíveis fontes de informação para transmissão via satélite. Com isso, é importante destacar que um processo de codificação de fonte
pode compor a primeira etapa da cadeia de geração de sinais para o transmissor digital.
O objetivo de um codificador de fonte (Encoder) é realizar a compressão do sinal utilizando
técnicas de processamento digital de sinais para
reduzir a taxa de transmissão do sinal de entrada.
Com isso, a largura de banda ocupada pelo sinal
é reduzida levando a alguma otimização na ocupação eficiente da largura de faixa disponível. Este é
um assunto muito importante nesse âmbito de comunicações via satélite: primeiro porque se deseja
transmitir serviços com elevada taxa de transmissão (refletindo em qualidade de serviço) e segundo porque os recursos disponíveis (espectro) para
realizar as transmissões se encontram cada vez
mais disputados elevando os custos em torno de
todas as atividades de operação. Por isso, é muito
importante compreender como se faz uma análise
de desempenho de um sistema de comunicação
digital (o qual depende da largura de banda e da
taxa de transmissão do sistema) – aplicando estes
conceitos aos enlaces de satélite.
A camada de multiplexação gera o fluxo multiplexado de serviços (com os respectivos sinais)
que alimenta o sistema de transmissão da estação
terrena. A responsabilidade do transmissor digital é
modular o fluxo digital adequando os sinais ao canal de propagação em uma frequência de Uplink
Anotações
79
apropriada para transmissão de sinais para o satélite. É muito importante ressaltar que as formas de
onda transmitidas são amplificadas e enviadas para
a antena de transmissão da estação terrena. Os sinais de RF (modulados) na saída do transmissor
digital são irradiados como ondas eletromagnéticas que possuem suas características (frequência
– fase – amplitude) moduladas por símbolos digitais
dentro de um alfabeto de modulação conhecido –
retratando assim o conceito de modulação digital
de sinais. Neste contexto, a tarefa do receptor digital é realizar uma investigação sobre os sinais recuperados pelo front end do satélite a fim de identificar
quais os símbolos digitais foram transmitidos.
Para compreender essa análise em mais detalhes, seria interessante explicar o funcionamento
de um sistema de comunicação digital via satélite à
luz do conceito de transmissão digital. A transferência de dados digitais em um enlace de satélite se faz
por intermédio de um sistema de modulação digital
o qual possui a seguinte responsabilidade: realizar
a adequação (com máxima eficiência) dos sinais de
informação ao canal pelo qual serão transmitidas as
informações (do ponto de vista de qualidade e de
custos). Da teoria de transmissão digital, é possível
utilizar ótimas referências na literatura de engenharia de telecomunicações como [5] [6] [7] [8] [9] as
quais identificam o processo de modulação digital
consistindo em duas etapas: Um Mapeamento Digital seguido da efetiva Modulação de Sinais.
Para entender esse conceito de mapeamento
digital e modulação digital, o diagrama da Figura 43
ilustra as etapas que compõem um sistema de comunicação digital com enfoque no funcionamento
do modulador digital e no demodulador digital. Desde já, é importante notar que o funcionamento de um
modulador digital é complexo e particular para cada
tecnologia. Assim, trata-se de um esquema simplificado e geral que possui informações interessantes
para o estudo dos sistemas de modulação que formam o núcleo de um payload de comunicação.
80
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
Figura 43 - Diagrama em blocos de um sistema de comunicação digital
O ponto principal a ser analisado no diagrama vem com a busca dos conceitos de modulação (translação do espectro dos sinais) e mapeamento digital (geração de símbolos digitais).
Investigando o modulador digital no diagrama da
Figura 43, verifica-se que a efetiva translação de
espectro (a efetiva modulação) só ocorre de fato
no estágio de Upconverter, ou seja, a modulação
acontece na forma de estágios de translação e
somente após o mapeamento digital. Este mapeamento digital também é conhecido na literatura
como modulação digital de sinais. Repare que
o mapeamento digital ocorre no domínio digital
(banda base) dentro de um processador digital
Anotações
de sinais. A grande vantagem e elegância dos
sistemas de comunicações digitais residem no
fato de que inúmeros processamentos digitais de
sinais são realizados aumentando a robustez dos
sinais que serão transmitidos e por consequência, melhorando o desempenho dos sistemas de
comunicações.
O processo de mapeamento digital possui suas
bases na teoria de comunicação digital (na análise do espaço de sinais) com o objetivo de criar os
símbolos digitais em um plano de sinais – conhecido como constelação digital de sinais: com um
eixo em fase (I – in-phase) e quadratura (Q – quadrature). Isso significa que os símbolos digitais
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
são compostos por uma componente em fase
e uma componente em quadratura (por isso o
chamado mapeamento I&Q). Após o mapeamento de símbolos tem-se um tipo especial de filtro
que visa limitar a largura de faixa dos sinais e ao
mesmo tempo prover robustez ao sinal que será
transmitido (um dos filtros mais utilizados nesta etapa é o filtro raiz cosseno elevado). O DAC
(Digital-to-Analog Converter) realiza a conversão
digital-analógica para início da translação do espectro dos sinais. Com isso, os símbolos complexos se transformam em formas de onda “digitais”
(pois pertencem a um alfabeto finito-conhecido)
que modulam uma onda portadora em frequência intermediária (IF – Intermediary Frequency).
Após esse estágio de translação para frequência intermediária, tem-se a etapa de Upconverter
para radiofrequência (RF) seguida do processo
de amplificação e filtragem dos sinais que serão transmitidos. Logo, o sistema de modulação
é caracterizado por uma parte totalmente digital
a qual processa os bits do fluxo digital com técnicas de processamento digital de sinais e uma
parte analógica caracterizada pela translação de
espectro dos sinais em banda base para o canal
de RF desejado.
Fazendo a projeção dessa análise para comunicações via satélite, o desafio dos sistemas de comunicação é retratado pela geração de sinais de
Uplink e Downlink robustos e que ao mesmo tempo estejam estritamente conformados dentro do
canal de RF. Essa abordagem é muito importante uma vez que processo de amplificação é por
Anotações
81
natureza não-linear e gerando espúrios e interferências fora da largura de banda de interesse.
Ao enfrentar as adversidades do canal sem fio,
o demodulador digital tem a responsabilidade de
realizar a translação do espectro do sinal em banda passante para banda base por meio da etapa
de Downconverter para uma frequência intermediária. Após o mixer de FI tem-se a digitalização
do sinal para a realização da demodulação digital
e recuperação dos bits codificados. A Figura 44
traz os conceitos relacionados com o processo
de recepção e com o desempenho dos sistemas
de comunicações digitais. Os efeitos e adversidades do canal são visualizados na constelação
de sinais como um deslocamento de um símbolo
digital em relação a sua posição ideal na constelação da modulação digital. Em função desses
efeitos, o receptor deve realizar o processo de recepção (interpretado em três etapas – detecção,
decisão e decodificação dos sinais) fazendo uma
estimativa de qual foi o símbolo transmitido.
82
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
Figura 44 - Conceitos sobre o desempenho e o processo
de recepção de sinais em sistemas de comunicações
No entanto, sabe-se que podem ocorrer
erros que dependem do grau de severidade dos
efeitos do canal (condições de propagação, ruído AWGN, interferências e instabilidades nos
próprios circuitos de telecomunicações). Todos
esses efeitos (que dependem de muitos fatores
como frequência de operação, taxa de transmissão entre outros) são somados e provocam
erros de decodificação no processo de demapeamento digital (conversão dos símbolos
Anotações
estimados nos bits de informação correspondentes). Logo, torna-se necessário caracterizar
o receptor e investigar o seu desempenho em
termos de probabilidade de erro de bit (BER –
Bit Error Rate) a qual relaciona a quantidade de
bits errados sobre o total de bits transmitidos
no sistema de comunicação. Quanto menor é
a estimativa da probabilidade de erro de bit do
sistema, menor é o número de erros e melhor
é a qualidade do enlace de comunicação. Em
Capítulo 2 - Arquitetura dos Sistemas de Comunicações via Satélite
outras palavras, quanto maior é a BER de um
sistema de comunicação digital menor será a
qualidade do enlace comprometendo a transmissão e recepção dos serviços. Observando
com mais detalhes essa questão do mapeamento digital, é possível notar que o arranjo da
constelação de sinais bem como a quantidade
de símbolos que formam a modulação digital
têm influência no desempenho do sistema de
comunicação. Portanto, o interessante para o
receptor, tanto nos enlaces de Uplink quando
Downlink é operar com a maior relação de energia entre o sinal desejado (símbolos digitais) e
os efeitos do canal (interpretados como ruído
que corrompem os símbolos na constelação).
Sob essa perspectiva, os processos de detecção – decisão e decodificação se tornam mais
fáceis para o receptor digital. Por isso, a análise
dos projetos de enlace de comunicações via
satélite deve ser ponderada pelos requisitos de
operação das aplicações-serviços, pelas questões de configuração do sistema de comunicação, e principalmente pelas das condições de
recepção do sistema.
Anotações
83
Quiz 1
Após ter lido todas as páginas de seu livro digital, chegou a hora de
colocar o seu conhecimento à prova. Coloque V para as afirmativas
verdadeiras e F para as falsas.
Confira as respostas corretas no final do livro.
1- Nos estudos sobre o funcionamento do segmento espacial, o sistema-plataforma é retratado por todos
os componentes de telecomunicações do satélite enquanto o sistema de infraestrutura de mecânica de
hardware é responsável pelo equilíbrio do eixo de estabilização do satélite.
2 -Sem dúvida, o subsistema de controle e temperatura deve operar bem acima da saturação que o
satélite alcance a sua máxima eficiência no processo de repetição de sinais.
3 - O Apogeu é o ponto orbital mais próximo da Terra enquanto o Perigeu é o ponto mais distância da Terra.
4 - A Terceira Lei de Kepler estabelece uma relação entre o período orbital e o raio orbital.
5 - O Satélite do Tipo Bent-Pipe possui elevado desempenho em função da demodulação dos sinais
recebidos e por intermédio da aplicação de códigos corretores de erros.
6 - O sistema payload é composto pelos blocos funcionais (circuitos) que realizam os principais objetivos
de missão do satélite.
7 - Em sistemas de comunicações via satélite, a transmissão de sinais envolve a alocação de um recurso
(largura de banda no satélite) o qual deve ser utilizado da melhor maneira possível
Quiz 2
Chegou a hora de fazer um pequeno teste para avaliar o que você
aprendeu. Responda as questões abaixo e confira as respostas
corretas no final do livro.
Este questionário não é avaliativo, mas sim para fixação do conteúdo.
1 - Qual seria o motivo principal dos valores de frequência para Uplink serem mais do que para Downlink?
a) De fato, as frequências maiores para
Uplink são mais indicadas por serem
mais adequadas para as transmissões
espaciais, ou seja, estas frequências
altas sofrem menos com os efeitos do
meio de propagação.
b) De fato, nas estações terrenas tem-se um
controle maior na geração do sinal de RF a
fim de enfrentar as adversidades do canal
que interliga a estação com o satélite.
Assim, o sentido de Downlink é privilegiado
pelos próprios desafios (que são maiores),
pois quanto menor é o valor da frequência
do sinal de RF, menores são os efeitos de
perda no espaço livre. No entanto, deve-se
observar que os efeitos de absorção de
energia pela atmosfera sempre irão existir.
c) De fato, as frequências de Uplink são
padronizadas dessa forma (sempre
maiores) para facilitar o planejamento de
enlace de canalização em sistemas de
satélites.
2 - O modelo de figura de ruído de um Downconverter em um satélite segue:
a) A modelagem equivalente passiva
para dispositivos do tipo mixer
b) A modelagem equivalente em banda
base para dispositivos do tipo mixer
c) A modelagem equivalente ativa para
dispositivos do tipo mixer
3 - As definições e conceitos para Figura de Ruído são:
a) A Figura de Ruído é definida como a
razão entre a relação portadora-ruído
de saída pela entrada em dispositivoselementos do sistema e quanto maior
é o seu valor (em dB), melhor se torna
a qualidade do sinal ao ser processá-lo
pelo dispositivo.
b) A Figura de Ruído é definida como a razão
entre a relação G/T dos dispositivos (ativos
e passivos) e quanto menor é o seu valor,
mais degradante é o dispositivo analisado.
c) A Figura de Ruído é definida como a
razão entre a relação portadora-ruído
de entrada pela saída em um elemento
ou dispositivo (passivo ou ativo) e
quanto menor é o seu valor menor será
a degradação de portadora-ruído na
análise do dispositivo.
4 - O que é Backoff em Sistemas de Comunicações via Satélite?
a) É um avanço de potência no
dimensionamento do sistema
para aproveitar ao máximo os
amplificadores do satélite
b) É um recuo de potência no
dimensionamento do sistema para
evitar problemas de intermodulação
em virtude da não-linearidade do
processo de amplificação.
c) É um recuo de potência do sistema
para aumentar a energia gasta pelo
sistema de amplificação.
Respostas - Quiz 1
Problema
1
2
3
4
5
6
7
Resposta
F
F
F
V
F
V
V
Respostas - Quiz 2
Problema
1
2
3
4
Alternativa
b
c
c
b
Referências Bibliográficas
[1] Projeto Iriduim © Iridium Communications Inc. – www.iridium.com
[2] Obsertatório Nacional – Cartas de Declinação Magnética
http://www.on.br/ - http://www.on.br/conteudo/modelo.php?endereco=servicos/servicos.html
[3] Elbert, R. B. Introduction to Satellite Communication (Third Edition): Artech House – (2008).
[4] Kolawole, O. M. Elbert, R. B. Satellite Communications Engineering (Third Edition): CRC Press (Taylor
& Francis Group) – (2014).
[5] Haykin, S. Communications Systems, 4th Edition. MacMaster University, Jhon Wily and Sons, 2001.
[6] Proakis, J. Salehi, M. Digital Communications, 5th Edition. MacGraw – Hill, 2008.
[7] Lin, S. Costello Jr, D. J. Error Control Coding, 2thEdition. Prentice Hall, June 7, 2004.
[8] Maral, G. VSAT Networks (Second Edition), John Wiley & Sons (2003) S.
[9] Jeruchim, M. C. Balaban, P. Shanmugan, K. S. Simulation of Communications Systems, Modelling,
Methodology and Techniques. Information Technology: Transmission, Processing, and Storage, Series
Editor: Jack Keil Wolf, 2002.