Master Thesis
Zurich, October 2020
Towards Simultaneous
Topology and Form Finding
Krispin Wandel
Supervisors:
Dr. Roi Poranne
Dr. Bernhard Thomaszewski
Examiner:
Prof. Stelian Coros
Computational Robotics Lab
Department of Computer Science | ETH Zurich
Abstract
This thesis originated from a collaboration with the architecture department that
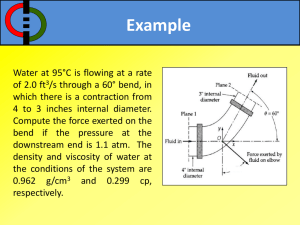
works on the project Semiramis. Semiramis is a large sculpture consisting of multiple
islands as shown in Fig. A.1. There are several interesting problems arising from
the Semiramis project. In this thesis we dealt with two main objectives.
The first one is about finding a form for the islands. The islands consist of planar polygonal wooden panels which are glued together. In order to find interesting
shaped wooden panels, the goal was to create a tool that could automatically generate these wooden panels with only a few design parameters. For this purpose, we
developed a novel approach that can flatten a high resolution mesh.
The second objective targets various shape and structural constraints. In particular, on the one hand we optimize the shape so that the area of the wooden panels
and the total glue line between those panels do not exceed pre-defined limits, and
on the other hand we want to optimize the shape so that the loads acting on each
joint are minimized.
i
Thanks to my supervisors Dr. Roi Poranne and Dr. Bernhard Thomaszewski for
introducing me to exciting topics in optimization and for having fruitful discussions.
ii
Contents
1 Introduction
2 Panelization
2.1 Introduction & Related Work
2.2 Panelization . . . . . . . . . .
2.3 Planarization . . . . . . . . .
2.4 Results & Discussion . . . . .
2.5 Conclusion & Future Work . .
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3 Shape Optimization
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Geometric Constraints . . . . . . . . . . . . . . . . . . . . .
3.2.1 Penalty Terms . . . . . . . . . . . . . . . . . . . . . .
3.2.2 Results . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Structural Constraint . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Sensitivity Analysis . . . . . . . . . . . . . . . . . . .
3.3.2 Discrete Shell Model . . . . . . . . . . . . . . . . . .
3.3.3 Comparison between Discrete and Solid Shell Model .
3.3.4 Maximum Bending Load Constraint . . . . . . . . . .
3.3.5 Results . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.6 A Note on Compression Only Shells . . . . . . . . . .
4 Conclusion
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
4
4
6
6
.
.
.
.
.
.
.
.
.
.
.
9
9
9
9
10
12
12
13
20
20
22
22
28
A Further Notes & Figures
29
A.1 Implementation Details . . . . . . . . . . . . . . . . . . . . . . . . . . 29
A.2 Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
iii
List of Figures
2.1
2.2
Bend element . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Pipeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1
3.2
3.3
3.4
3.5
3.6
3.7
Maximum area and glue length optimization . . . . . . . . . . . . .
Island . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Beam model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Geometric constructions for the bend element . . . . . . . . . . . .
Comparison between DcS and SoS . . . . . . . . . . . . . . . . . . .
Maximum bend stress optimization . . . . . . . . . . . . . . . . . .
Optimization over all penalty terms. Semiramis island before (left)
and after (right) optimization. . . . . . . . . . . . . . . . . . . . . .
Simultaneous minimization of area, glue and maximum bend stress
penalty. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Using Sensitivity Analysis to find a compression only shell for a dome.
Green = compression, red = tension. . . . . . . . . . . . . . . . . .
3.8
3.9
.
.
.
.
.
.
5
7
11
14
15
18
21
23
. 24
. 25
. 27
A.1 Vegetale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
iv
List of Tables
2.1
3.1
The results strongly depend on the course of the sliders. However, in
the results above we kept the sliders roughly the same during optimization with values around τ = 3.0e−6 , wB = 2.5e2 , wL2 = 1.5e−2 ,
wmembrane = 2.5e−2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
Wood material parameters . . . . . . . . . . . . . . . . . . . . . . . . 20
v
Chapter 1
Introduction
Architecture always longs for the new and tries to push the limits of the possible.
Complex structures also drive many research groups in robotics, materials science,
simulation and optimization fields to constantly explore new methods. This work is
also motivated by a construction project of D-ARCH, ETH. The building project is
called Semiramis and takes its name from the ”Hanging Gardens of Semiramis”. Also
known as ”The Floating Gardens of Babylon”, according to reports, was a gigantic
building whose large terraces were greened. Semiramis, however, is somewhat more
modest in its construction and consists of several islands supported by pillars in the
air, forming the garden terraces. Fig. A.1 shows a draft of Semiramis. In this work
we were concerned with finding a form for the Semiramis islands. To understand
why this is important for the architects, some context is needed. In architecture,
the creator usually only has a rough idea of the final result at the beginning. But
this is usually sufficient for a first small-scale prototype that can be presented to
investors. In the planning phase, however, the design must be finalized, taking
into account costs and structural constraints. In the conventional procedure, the
architect plans the building on his own and then sends his design to the structural
engineer, on whose evaluation the architect again adjusts his building plan. This is
an iterative and long-winded process. Antoni Gaudi (1852-1926) is one of the most
famous architects who broke out of this cycle. In the Sagrada Familia in Barcelona,
he found new and complex forms for vaults by modeling them with chains of strings
and different weights. By playing with the weights, he was able not only to change
the shape of the vault, but also to guarantee its structural integrity. This was a
first form of a parametric and inverse design process. Parametric in the sense that
Gaudi modified the shape of the vault not directly but indirectly by weights (the
parameters) and inverse in the sense that the parameters were adapted based on the
static (settled) solution of the string network. Gaudi needed a whole decade until
the final planning of the vault, because the modeling by strings and weights was very
complex. Today this design process can be accelerated by computer-aided software.
The software ”Grasshopper” is one of the pioneers in this field and enables architects
to find new forms through generative algorithms. Semiramis aims to impress with
innovation in a similar way to Gaudi a hundred years ago. One aspect of this is
to make the shapes of the islands interesting and unique, while at the same time
meeting structural as well as geometric and financial requirements. For this purpose
a Grasshopper plugin should be created, which is similar to the principle of the
Parametric Inverse Design process and finds a valid shape for the island based on
1
CHAPTER 1. INTRODUCTION
a smooth target mesh (design parameter). The goal of this work was to implement
this plugin. There were three big challenges that we had to solve:
• The islands consist of a wooden shell which serves as a carrier for the earth
and the planting and is composed of several wooden plates glued together.
Our tool must therefore generate a surface consisting of planar polygons. At
the same time, we want to stay as close as possible to the target mesh.
• The surface must also fulfill geometric constraints. On the one hand, the
surface of each polygon is limited to a given maximum, since the robots that
join the wooden panels have a maximum lifting capacity. On the other hand,
the glue line between the wooden plates must not be too long for financial
reasons.
• The final challenge was that the adhesive can only withstand a certain edge
bending stress. This creates an inverse design problem in which we optimize
the shape based on measurements in the static equilibrium of our physical
model of the island.
Due to the complexity of the problem, we have decided to treat point 1 of points 2
& 3 separately. That means we will split the plugin into two parts. We will treat
these two parts accordingly in the next two chapters.
2
Chapter 2
Panelization
2.1
Introduction & Related Work
We present a new approach that can find a simplified representation of a high resolution input mesh. The simplified version will consist of flat surfaces which are
formed by minimizing a continuous version of the L0 norm over angles between
neighbouring triangles and the L2 norm that penalizes the distance to the original
input mesh. Our approach has been used in the architecture project Semiramis in
order to generate planar polygonal wooden panels.
Mesh simplification methods have been mostly focused on triangle and quad
meshes. One popular method that belongs to this class of algorithms is [1] that
contracts vertices based on quadratic error metrics while maintaining a triangle
mesh. However, with extreme mesh simplifications, triangles cannot capture enough
information to achieve satisfactory results.
Variational Shape Approximation (VSA) [2] tries to obtain a multi-planar surface
by using k shape proxies. It uses a similar approach to k-means clustering, but it
tries to find shape proxies instead of means. From these shape proxies a simplified
surface can be reconstructed. Clustering is also used in [3], in which the authors
present a method to compute and fabricate multi-planar models. However, their
method generates a simplified mesh by iterating over two steps. First, they solve
a multi-label-minimum-graph-cut problem to find clusters and in the second step,
their method continuously deforms the input mesh so that the triangles converge to
clusters to which they were previously assigned. The authors found that the results
produced by their method were visually more appealing than those generated by
VSA. However, their method takes minutes to process a mesh, while VSA only
needs a few seconds. Moreover, their approach requires fine-tuning of many hyperparameters which can be overwhelming for the end user.
Both, their method and VSA, try to solve a k-mean equivalent problem. This
problem is in general NP-hard and, thus, only local solutions can be found using
iterative algorithms. In contrast, we introduce a novel but simple objective that can
be optimized through standard gradient descent methods. Thus, our tool can be
accelerated via a GPU and lets the end user find a simplified form interactively.
3
2.2. PANELIZATION
2.2
CHAPTER 2. PANELIZATION
Panelization
Our goal is to find a small set of planar polygons pk that build a surface Sgoal that is
close to a given input mesh Min . In our method, we gradually deform the triangles in
Min to get an output mesh Mout that matches such a surface. Operating directly on
Min has two major advantages: First, we are warranted to have the same topology
as Min and, second, we get an uv-texture mapping from Min to Mout almost for
free. In the following, we will derive an objective on Min , f (Min ), that defines the
deformation from Min to Mout .
For convenience, let us introduce bend elements bl that consist of two neighbouring triangles tb,1 = (A, B, C) and tb,2 = (A, D, B) with bend angle θb (see Fig. 2.1).
A planar polygon pk in Mout is a set of neighbouring triangles such that for all bend
elements inside pk (tb,1 ∈ pk and tb,2 ∈ pk ) θb is zero.
A small set of planar polygons corresponds to a small set of bend elements with
non-zero bend angle. This observation yields the following objective:
X
(2.1)
f1 (Mout ) = wB ·
|θb |L0 + wL2 · |Min − Mout |2L2
|
{z
}
b ∈ Mout
B
{z
}
|
A
In (A) we penalize the number of non-zero bend angles using L0 -regularization with
weight wA and in (B) we add a term for staying close to the input mesh.
Since |θb |L0 is non-convex and non-smooth, optimizing f1 directly is very hard.
However, similar to the approach in [4], we can replace |θb |L0 with a smooth sigmoid
function that is convex near zero:
|θb |L0 ,smooth =
θb2
,
θb2 + τ
(2.2)
where τ handles the sharpness of the sigmoid function. τ influences our algorithm
as follows. For a high value of τ our sigmoid function becomes a quadratic-convex
function and, thus, our algorithm would simply smooth the mesh. So if we start
from a high value for τ and then reduce the value of τ during the optimization, this
will first smooth the input mesh, then cause creasing, and finally result in planar
surfaces. Furthermore, we want to note that, intuitively, a higher value for wB should
reduce the number of clusters. However, the derivative of our sigmoid function, for
small τ , is close to zero for θb 6= 0. Also, the non-convexity of the sigmoid function
makes it difficult to give any guarantees about the influence of wB .
We also added a triangle membrane energy part to regularize the amount of
deformation each triangle experiences during optimization. The associated weight
for this energy is wmembrane .
2.3
Planarization
Due to the substitution of |θb |L0 with |θb |L0 ,smooth and the L2 -regularization term,
bend angles are not guaranteed to attain exactly zero. A non-planar polygon p̂k in
Mout is a set of neighbouring triangles for which the bend angle |θb | of each bend
element b inside p̂k is smaller than some threshold θ̃. We will now discuss how we
can planarize these non-planar polygons.
4
2.3. PLANARIZATION
CHAPTER 2. PANELIZATION
Figure 2.1: Bend element
We use the iterative local/local planarization algorithm from [5]. Their method
iterates over two local optimization steps. The first one fits a plane to the vertices
in p̂k and the second one solves the plane equations for each vertex in a weighted
least square manner.
More formally, the first local optimization problem can be formulated as:
X
min
(nk · qi + dk )2
nk ,dk
vi ∈ p̂k
(2.3)
2
s.t. ||nk ||L2 = 1,
where qi denotes the solution for the vertices found by the previous iteration of the
algorithm. Note that this problem is equivalent to Principal Component Analysis
(PCA) where nk corresponds to the principal component with smallest Eigen Value
(EV).
The second local optimization problem can be defined as the following weighted
least square problem for each vertex qi :
X
min µs · ||vi − qi ||2L2 + (1 − µs ) ·
(nk · qi + dk )2 ,
(2.4)
qi
k: qi ∈p̂k
where µs is a parameter that in each step s controls how far we go into the direction
of the solution to the plane equations while staying close to the input mesh. We
start with µ0 = 1 and decrease its value with each step by a rate of r ∈ (0, 1),
µs+1 = r · µs , which leads to visually more pleasing results. A solution to Eq. (2.4)
can be found by solving the standard weighted least square system of equations:
I(3)
v
T
T
I(3) N W
· qi = I(3) N W i ,
N
d
5
(2.5)
2.4. RESULTS & DISCUSSION
CHAPTER 2. PANELIZATION
with
N = nTk k: qi ∈p̂
k
d = dk k: qi ∈p̂
k
µs · I(3)
0
W =
0
(1 − µs ) · I(|k : qi ∈ p̂k |)
2.4
(2.6)
(2.7)
(2.8)
Results & Discussion
We have summarized the pipeline of our approach again in Fig. 2.2 using a Semiramis
island. In Table 2.1 we show results for different shapes. In general, the found shape
looks visually appealing. However, there are a few points to note.
First of all you notice that some planar surfaces are much larger than others.
For example, in the cow the teat areas are much smaller than the belly areas. If
the designer doesn’t want this, he could for example smooth the mesh at the teat
area first. Generally, the designer cannot determine the minimum/maximum size or
number of areas in advance with our tool. This is only possible to a certain extent
indirectly by controlling τ and wB . For the same reason we cannot compare our
algorithm with [2] and [3] at the moment, because they allow you to specify the
number of clusters.
Since our algorithm works directly on the input mesh, unwanted artifacts may
also occur. For example, if you look very closely at the elephant’s neck, you can
see that there is an area that consists of only one triangle. However, such artifacts
could usually be corrected by mesh editing tools, such as an edge flip tool.
Another challenge is to ensure that during optimization the triangles do not
become singular or intersect themselves. Although we have a membrane energy in
our target function, it is not always easy to find a compromise between the membrane
energy weight and the bending energy weight. Singular triangles become especially
problematic when trying to cluster the triangles because the triangle normals are no
longer meaningful, and, thus, it is not clear to which cluster those triangles belong
to. An artifact of this can be seen for example in the left leg of the elephant. In
principle, however, this problem could also be solved by a mesh post edit process
which removes the singular triangles.
2.5
Conclusion & Future Work
In this chapter we have introduced a new approach to mesh simplification. Instead
of formulating the problem as an NP-hard cluster problem like in [2] and [3], we
only need to minimize a simple function and can use standard gradient methods.
This makes our algorithm so fast that the designer gets immediate feedback when
adjusting the parameters.
From our shown results you can see that our approach is a promising way. The
next step is to clarify how the choice of our parameters (τ and weights) affects the
algorithm. Furthermore, we want to use mesh edit tools to help the algorithm to find
better solutions. The last and most difficult task would be to make the algorithm
sensitive to the given number and size of surfaces.
6
2.5. CONCLUSION & FUTURE WORK
CHAPTER 2. PANELIZATION
Figure 2.2: Pipeline
7
2.5. CONCLUSION & FUTURE WORK
Original
After Panelization
CHAPTER 2. PANELIZATION
After Planarization
Table 2.1: The results strongly depend on the course of the sliders. However, in the
results above we kept the sliders roughly the same during optimization with values
around τ = 3.0e−6 , wB = 2.5e2 , wL2 = 1.5e−2 , wmembrane = 2.5e−2 .
8
Chapter 3
Shape Optimization
3.1
Introduction
In the previous chapter, we presented a simplification algorithm that helps the architects to find a shape for the Semiramis islands that consists of planar surfaces on
the one hand and is close to the architect’s sketch on the other. In this algorithm,
however, we have not yet considered the geometric and structural conditions.
The goal of the second part of this thesis was to optimize the simplified mesh so
that it satisfies the following three constraints while staying close to the input mesh.
First, due to the maximum load capacity of the robotic arms, that work in team to
assemble the wood shell of the island, the wood panels of the shell shall not exceed a
certain weight limit. This constraint translates into a maximum-area constraint as
the material and height for the wood panels is fixed. Second, the glue line that holds
the wood panels together is constrained by length because of financial reasons. The
third constraint imposes a maximum bend load that can act on the joint between
two panels.
While the first two constraints are of pure geometric nature, the last constraint
is a structural one that involves simulating a physical model of the island. Our
approach is to obtain a solution shape by minimizing an objective function that
has three penalty terms corresponding to the three constraints. In the following
sections, we will first derive a formulation for the geometric penalty terms and then
discuss the structural one including the physical model of the island.
3.2
3.2.1
Geometric Constraints
Penalty Terms
Maximum Area Constraint
Let pk , k = 1 . . . Npoly , be the Npoly planar polygons of the input mesh, Min =
SNpoly
k=1 pk , as in the previous chapter. Moreover, let t ∈ pk denote the triangles
that make up the planar polygon. If at is the area of a triangle t and amax is the
maximum allowed area a planar polygon can have, then we can define our maximum-
9
3.2. GEOMETRIC CONSTRAINTS
CHAPTER 3. SHAPE OPTIMIZATION
area penalty term as follows:
Npoly
farea (M ) = warea ·
X
fbarrier
X
at − amax ,
(3.1)
t∈pk
k=1
where warea is a weight and fbarrier is a one-sided quadratic barrier function:
(
0, x ≤ 0
fbarrier (x) =
x2 , x > 0
(3.2)
Maximum Glue Length Constraint
For the maximum-glue-length constraint we use a very similar approach to the
maximum-area constraint. We define eglue,j , j = 1 . . . Nglue , as the Nglue edges of
the mesh that belong to the glue line, that is, the edges between the planar polygons pk . If we denote emax as the limit in length that the glue line can attain, we
get the following penalty term for the maximum-glue-length constraint with weight
wglue :
fglue (M ) = wglue · fbarrier
NX
glue
keglue,j kL2 − emax
(3.3)
j=1
Planarity
The last geometric constraint enforces the triangles t ∈ pk to stay planar for k =
1 . . . Npoly . Let θb , b = 1 . . . NB , be the bend angle as defined in the previous chapter
(see Fig. 2.1). Since we want the bend angle to be zero for all bend elements inside
a polygon, the penalty term becomes:
Npoly
fplanar (M ) = wplanar ·
XX
θb2
(3.4)
k=1 b∈pk
3.2.2
Results
In Fig. 3.1 we show the result of the optimization over:
fpenalty = farea + fglue + fplanar
(3.5)
As input we took a Semiramis island (s. Fig. 3.1a) and set the limits to amax =
1.20m2 and emax = 109m which corresponds to a reduction by 10 percent and 5
in
percent, respectively, from the initial maximum values ain
max and emax of the input
mesh Min . Those limits were chosen randomly with the only restriction to be near
in
to ain
max and emax in order to get a solution that is not too far away from Min . From
the graphs in Fig. 3.1b and Fig. 3.1c we can clearly see that by optimizing fpenalty we
found a solution mesh (s. Fig. 3.1a) that fulfills both the area and glue constraint
while the polygons stay visually planar.
10
3.2. GEOMETRIC CONSTRAINTS
CHAPTER 3. SHAPE OPTIMIZATION
(a) Semiramis island before and after optimization
(b) Maximum area constraint
(c) Maximum glue length constraint
Figure 3.1: Maximum area and glue length optimization
11
3.3. STRUCTURAL CONSTRAINT
3.3
CHAPTER 3. SHAPE OPTIMIZATION
Structural Constraint
The structural penalty term is harder to compute than the geometric ones as it does
not only depend on the rest shape u but also on the deformed (or material) state x
of the mesh. Let f (x, u) be the penalty term for the maximum bend load constraint.
Then, the minimization of f (x, u) is subject to yet another constraint that describes
that x is in a static equilibrium:
min f (x, u)
u
(3.6)
s.t. g(x, u) = 0,
where g(x, u) is the total force acting on each node inside the deformed mesh. Luckily, Sensitivity Analysis (SA) allows us to use standard gradient based methods on
f (x, u) while satisfying g(x, u) = 0.
In the following sections, we will first cover SA which will give us an overview
of the terms that we have to compute. In particular, we will see that in each
optimization step we need to find a solution for x that satisfies the static equilibrium.
For that purpose, we will then continue the discussion with describing our physical
model for the island. Finally, we will use this physical model to derive a penalty
term for the maximum bending load constraint.
3.3.1
Sensitivity Analysis
Sensitivity Analysis (SA) aims at solving an optimization problem like in Eq. (3.6)
by using the Implicit Function Theorem:
Theorem 3.3.1 (Implicit Function Theorem) Let g(x, u) be a continuously dif∂g
(x, u) is invertible, then
ferentiable function and (x, u) such that g(x, u) = 0. If ∂x
there exists an open set U around u with a unique continuously differentiable function x(u) such that for all u ∈ U g(x(u), u) = 0.
In SA, we call u control variables and x state variables. Note that for physical
∂g
systems ∂x
(x, u) corresponds to the Hessian of the energy in the system and is usually
invertible for all u. Thus, by Theorem 3.3.1 we can assume that for every u there
exists a continuously differentiable mapping u → x(u) such that g(x(u), u) = 0. In
particular, this yields
dg(x(u), u)
∂g
∂g
=
S+
≡ 0,
du
∂x
∂u
(3.7)
where S is called the sensitivity term:
dx
∂g −1 ∂g
S=
=−
du
∂x ∂u
(3.8)
Finally, we get
df (x, u)
∂f dx ∂f
=
+
du
∂x du ∂u
∂f
∂f
=
S+
∂x
∂u
12
(3.9)
(3.10)
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
For second-order methods such as Newton we also need the Hessian of f (x, u)
with respect to u. Using standard differentiation rules we get (see [6] for a complete
derivation):
2
∂
∂ 2f
d2 f
∂f
∂ 2f
T ∂
T ∂ f
S
S+
S +S
+ 2
=
S+2·
(3.11)
du2
∂x
∂x2
∂x∂u
∂u
|∂x {z ∂u }
3rd order tensors
The authors of [6] also observed that in many cases one can approximate
sonable well by ignoring the third-order tensors in Eq. (3.11):
2
2
2
2
b = ST ∂ f S + 2 · ST ∂ f + ∂ f ≈ d f
H
∂x2
∂x∂u ∂u2
du2
d2 f
du2
rea-
(3.12)
b is positive definite and therefore does not require much regularization.
Often, H
In each step of SA we need to find x(u), that is, we need to find the static
equilibrium of the Semiramis island under gravity. In the next section, we will
discuss our physical model for the Semiramis island which gives us an energy term
that we can minimize in order to find x(u).
3.3.2
Discrete Shell Model
Physical Model
In the following, we will derive a simplified physical model for the Semiramis islands.
In Fig. 3.2 we can see a schematic cross section of an island. Note, since the plans for
the installation of the soil and vegetation were unclear, we ignored these influences.
Therefore, we were left to model the wood shell of the island consisting of planar
wood panels glued together and a metal frame which goes along the rim of the wood
shell. Moreover, as the characteristics of the glue were unknown, we modelled the
wood shell as one block of wood.
The wood shell consists of wood panels that are rather thin at a thickness of 8cm
compared to their maximum area of 1.226m2 . There are two major approaches to
model thin shells. The first one is called Solid Shells (SoS) [7] and the second one
Discrete Shells (DcS) [8]. We decided to work with DcS as it is a substantial simpler
method than SoS but still leads to similar results (see Section 3.3.3 for a discussion).
In addition, due to its simplicity, DcS requires fewer computing resources and, thus,
accelerates optimization.
DcS introduces a triangle membrane energy WM that reacts to stretch and shear
forces and a flexural energy WF defined on bend elements (see Fig. 2.1) that models
the bending behavior of our material. To give a motivation for those energies, let
us first look at a flat beam (see Fig. 3.3a) with a thickness Θ = 2 · h. If the beam
does not exhibit any bending stiffness, the easiest way to model the beam would be
by a chain of springs that only accounts for stretching (see Fig. 3.3b). We could
also extend the simple spring chain by adding interlocking springs which results in
bending stiffness (see Fig. 3.3c). This approach is commonly used to model thin
plates, for example clothes, and only works for surfaces that are flat in their rest
position because the springs ignore the sign of the bend angle θ (see Fig. 3.3d).
Nevertheless, we used that approach for our metal frame since the high bending
13
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
Figure 3.2: Island
stiffness of metal leads to very little deformation and thus avoids a jump through
from θ to −θ.
Springs are simple to implement but with this simplicity comes a great loss in
accuracy. We will now derive an energy stored in the beam as a function of its
displacement. Since this energy is physically grounded, the simulation will match
reality more precisely. Let us look at the deformed beam as shown in Fig. 3.4a. The
beam is divided into three bend elements consisting each of two adjacent edges. We
are interested in the strain
x (z) =
l(z) − l0 (z)
,
l0 (z)
(3.13)
where l is the length of the bend element at height z (see Fig. 3.4b). Given the
strain, we can compute the energy in the beam using Hooke’s law. Hooke’s law
describes the following linear relationship between stress and strain:
σx νσy
−
E
E
σy νσx ∗
y =
−
= 0,
E
E
x =
(3.14)
(3.15)
where E is the Young Modulus and ν the Poisson ratio. (∗) Here we assume that
the depth of the beam does not change under load and, thus, we can set the lateral
strain y to zero. Furthermore, we do not consider z because in our model the
thickness of the beam stays constant during bending. Under these assumptions, we
14
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
(a) Beam rest position
(b) Beam modeled with springs
(c) Beam modeled with interlocking springs
(d) Angle problem with spring model
Figure 3.3: Beam model
15
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
get:
(1 − ν 2 )σx
E
Ex
σx =
1 − ν2
x =
Finally, the energy within a bend element is given by:
Z Z h
1
el
σx x dzdA,
E =
A −h 2
(3.16)
(3.17)
(3.18)
where A is the area of the bend element which is constant along the z-axis for a flat
beam.
We will now derive an expression for x (z) that we can insert into Eq. (3.18)
which will yield the formula for the popular bend energy. The curvature within a
bend element can be described by
κ(z) =
d2 w
θ
≈
,
l(z)
dx2
(3.19)
where l is the length and θ the bend angle of the bend element (see Fig. 3.4a) and
w is as in Fig. 3.4b. Since
l(z)
1
=
κ(z)
θ
l(z) = θ · r(z)
r(z) =
(3.20)
(3.21)
and the rest length l0 (z) for a flat beam is constant along z-axis,
l0 (z) = l00 ,
(3.22)
we get
(r0 + z) · θ − l0 (z)
l0 (z)
0
l + z · θ − l00
=
l00
l0 − l00
θ
=
+z· 0
0
l0
l0
0
0
l − l0
+ z · κ0
=
0
l0
= M + B (z),
x (z) =
(3.23)
(3.24)
(3.25)
(3.26)
(3.27)
where M is the membrane strain and B the bend strain. Combining this result
16
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
with Eq. (3.18) yields:
Z Z
el
h
E =
A
−h
Z h
1
σx x dzdA
2
E2x
dzdA
2
A −h 2 · (1 − ν )
2 2
Z Z h
E M + z · ddxw2
dzdA
=
2 · (1 − ν 2 )
A −h
2 2
Z Z h
E
dw
2
= WM +
·
z ·
dzdA
2
2 · (1 − ν ) A −h
dx2
Z h
Z 2 2
E
dw
2
= WM +
·
z dz ·
dA
2
2 · (1 − ν ) −h
dx2
A
Z 2 2
E
(2h)3
dw
= WM +
·
dA
2
2 · (1 − ν )
12 A dx2
Z 2 2
dw
D
dA
= WM +
2 A dx2
= WM + WB ,
Z
=
(3.28)
(3.29)
(3.30)
(3.31)
(3.32)
(3.33)
(3.34)
(3.35)
where D is the flexural rigidity:
D=
E · (2h)3
,
12(1 − ν 2 )
(3.36)
We have now derived the energy for a beam bend element (see [9, equation 6.93]
for a more general formula). The discrete shell energy is not much different from
Eq. (3.35). In fact, it assumes that each bend element within the mesh behaves
like a beam but defines the membrane energy on triangles unlike the bend energy,
which is indeed defined on bend elements. We will now have a closer look on how
to compute the bend energy from a bend element and on the membrane energy
imposed on triangles.
Bend Energy
Let us consider a bend element b as shown in Fig. 2.1. In order to compute the
curvature of the bend element, we do not only need the bend angle θb but also
the length of the bend element lb . One way to define lb is by setting it equal to
the average over line segments l(s) each associated to a point s on the hinge edge
eb = (A, B) (A,B as in Fig. 2.1).
Z
1
l(s)ds
(3.37)
lb :=
keb k eb
ab
=
,
(3.38)
3 · keb k
where ab denotes the area of the bend element. How we define ab is again up to
us. A common choice, however, is the diamond region around the hinge of the bend
17
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
(a) Bend element in a deformed beam
(b) Bend element in a deformed beam with local coordinate system
Figure 3.4: Geometric constructions for the bend element
18
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
element:
ab =
atb,1 + atb,2
3
(3.39)
Finally, given θb and lb , we can compute the curvature κb of the bend element:
κb =
3 · keb,0 k · (θb − θb,0 )
θb − θb,0
=
lb,0
ab,0
(3.40)
Note that using ∆θb = θb − θb,0 in the curvature corresponds to a flat beam with
bend angle ∆θb . This simplification is only valid for thin shells as with non-zero
rest bend angle, the assumption that lb,0 is constant along the z-axis is violated
otherwise.
We have now all terms to compute the bend energy:
Z 2 2
D
dw
b
WB =
dA
(3.41)
2 A dx2
D
(3.42)
≈
· ab,0 · κ2b
2
D 3 · keb,0 k2 · (θb − θb,0 )2
=
·
,
(3.43)
2
ab,0
Membrane Energy
We use the Saint Venant–Kirchhoff (StVK) material model with strain energy density function
WStVK (E) =
λ
[tr(E)]2 + µtr(E 2 ),
2
(3.44)
where (λ, µ) are the Lamé constants and E is a strain tensor. In our model we use
the non-linear Green strain:
1
E = (F T F − I),
(3.45)
2
where F is the deformation gradient that maps material vectors to their spatial
counterpart.
dx = F dX
(3.46)
Note that the material vectors are two dimensional while the spatial vectors are
three dimensional.
We will now derive an expression for F analytically: Let Bi , i = 1 . . . 3, be
the linear basis functions defined on the triangle t0 = (X1 , X2 , X3 ) in material
space. Then, we can express each point x inside the corresponding deformed triangle
t = (x1 , x2 , x3 ) as a function of material coordinates:
x(X) = x1 · B1 (X) + x2 · B2 (X) + x3 · B3 (X)
(3.47)
The deformation gradient will then be:
F =
dB1 (X)
dB2 (X)
dB3 (X)
dx(X)
= x1 ·
+ x2 ·
+ x3 ·
dX
dX
dX
dX
19
(3.48)
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
Parameter
Value
E (Young modulus)
ν (Poisson ratio)
ρ (density)
Θ (thickness)
4.0e8 GPa
0.2
0.5e3 kg / m3
0.08 m
Table 3.1: Wood material parameters
Note that the sum of the basis functions has to be one. Therefore, we get the
following relationships between the basis function gradients:
B1 (X) + B2 (X) + B3 (X) = 1
dB1 (X) dB2 (X) dB3 (X)
+
+
=0
dX
dX
dX
dB1 (X)
dB2 (X) dB3 (X)
=−
−
dX
dX
dX
(3.49)
(3.50)
(3.51)
Let us define et,i , i = 1 . . . 3, as the edge opposite to xi in triangle t. Furthermore,
let us denote hi as the shortest distance from xi to et,i . Based on the definition of
linear triangle basis functions, we then get the following relationships:
||∇Bi ||L2 hi = 1
∇Bi =
e⊥
t,i
||e⊥
t,i ||h
(3.52)
=
e⊥
t,i
2at
,
(3.53)
where e⊥
t,i denotes the vector orthogonal to et,i and with length ket,i k. Finally, this
allows us to compute F as follows:
"
#
T
dB2 (X)
F = x2 − x1 x3 − x1 dBdX(X) T
(3.54)
3
dX
3.3.3
Comparison between Discrete and Solid Shell Model
For all our simulations we use the material parameters as shown in Table 3.1. As
we can see from Fig. 3.5, the discrete shell model has a similar static solution as
the solid shell model. However, the discrete shell model seems to overestimate the
stresses, in particular, at the joints between two panels. This error could come from
the fact that the panels are not extremely thin at a height of 8 cm and, thus, could
potentially violate the assumption of the discrete shell model that, at rest shape,
the bend length is constant across the z-axis.
3.3.4
Maximum Bending Load Constraint
The maximum bending load constraint enforces an upper tension limit on the joints
between two panels based on the glue characteristics. Because the stresses take on
their extrema at the surface of the wood shell, we have to look at the top and bottom
20
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
(a) Bend stresses at the outer surface of the (b) Bend stresses at the outer surface of the
shell as found by DcS, bottom view
shell as found by SoS, bottom view
(c) Bend stresses at the outer surface of the (d) Bend stresses at the outer surface of the
shell as found by DcS, top view
shell as found by SoS, top view
(e) Comparing bend stresses for planes (foreground DcS)
(f) Color map for bend stresses
Figure 3.5: Comparison between DcS and SoS
21
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
bend stresses. From Eq. (3.17) and Eq. (3.27) we get the following formulation for
these bend stresses for each bend element b:
lb − lb,0
lb,0
= h · κb
b,M =
(3.55)
hb,B
(3.56)
−h
b,B = −h · κb
E
σbh =
· (b,M + hb,B )
1 − ν2
E
σb−h =
· (b,M + −h
b,B )
1 − ν2
The penalty term is then very similar to the geometric ones:
X
fbend (M ) =
fbarrier (σbh − σmax ) + fbarrier (σb−h − σmax ),
(3.57)
(3.58)
(3.59)
(3.60)
b
where σmax denotes the maximum bending load that the glue can handle.
3.3.5
Results
We used the material parameters as listed in Table 3.1. Furthermore, it is important
to note that we parametrize the high resolution mesh with a low resolution mesh
that we already used for minimizing the area and glue penalty. In Fig. 3.6 we show
the results for only minimizing fbend + fplanar . As we can see, the maximum bend
stress is greatly reduced. However, it is also important to note that not all bend
stresses fall below σmax , or only very slowly with a lot of deformation. There are
multiple reasons why a few triangles could stay above the stress limit. First, this
problem could be related to issues with the high resolution input mesh (either the
resolution is too low or the triangulation is not nice). Second, the problem could
origin from violations of the discrete shell assumptions. Lastly, the fplanar penalty
term could hinder the algorithm to optimize fbend further.
In our second experiment (see Fig. 3.7 and Fig. 3.8) we minimized all penalty
terms:
fpenalty = farea + fglue + fplanar + fbend
(3.61)
We can find a solution that satisfies the area and glue constraint, but some bend
stresses stay above σmax as in our previous experiment. However, it is still very good
to see that for most bend elements the bend stress seems to decrease by a lot. This,
ultimately, enables the designer to find a shape that is structurally more stable while
satisfying the area and glue constraint.
3.3.6
A Note on Compression Only Shells
It would be very desirable if we did not have to rely on the glue. However, this would
mean that our wooden shell would only experience compression forces. Especially
for vaults this is a big issue. A summary of research in this area can be found here
[10]. In particular, we want to highlight [11] which tries to find a compression-only
22
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
(a) Maximum bend stress relative to σmax be- (b) Maximum bend stress relative to σmax durfore optimization (red = bend stress is exceed- ing optimization
ing σmax )
(c) Maximum bend stress relative to σmax after optimization
(d) Maximum bend stress constraint
Figure 3.6: Maximum bend stress optimization
23
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
(a) Area and Glue
(b) Area and Glue
(c) Maximum Bend Stress relative to limit
(d) Maximum Bend Stress relative to limit
(e) Maximum Bend Stress
(f) Maximum Bend Stress
(g) Bend stress at outer surface, bottom view
(h) Bend stress at outer surface, bottom view
Figure 3.7: Optimization over all penalty terms. Semiramis island before (left) and
after (right) optimization.
24
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
(a) area
(b) glue
(c) maximum bend stress
Figure 3.8: Simultaneous minimization of area, glue and maximum bend stress
penalty.
25
3.3. STRUCTURAL CONSTRAINT
CHAPTER 3. SHAPE OPTIMIZATION
masonry model while minimizing the distance to a target structure. This paper
is inspired by Graphic Statics which concerns about finding a compression only
structure using graphical methods (which is equivalent to solving a linear program).
Unfortunately, we could not use their approach in our case, because the Semiramis
islands open up to the top. This detail makes our problem much more difficult
compared to conventional vaults.
We have also tried to find a compression-only structures using Sensitivity Analysis. We observed that for compression only structures the tensile traction forces
for each triangle must be compression forces. We can compute those tensile traction
forces as follows. First, we need the Cauchy stress tensor:
σ=
∂WStVK
∂E
(3.62)
Then, the tensile traction force t(nt,i ) corresponding to edge normal nt,i , i = 1 . . . 3,
of triangle t can be determined as follows:
t(nt,i ) = nTt,i σt nt,i
(3.63)
Note that for implementation purposes it is more convenient to compute the same
quantity using the second Piola-Kirchhoff stress tensor instead. We can then optimize the following function:
fcompression =
3
XX
t
fbarrier (t(nt,i ))
(3.64)
i=1
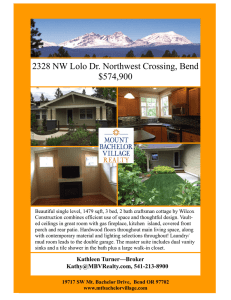
We found that this approach works on some cases. For example, we found a
compression only shell for a dome using this technique (see Fig. 3.9). However, while
it worked well in this example, generally, the approach is not guaranteed to find a
compression only structure. One major problem is that there does not always exist a
smooth transition from a configuration in tension to a configuration in compression.
For example, using a force diagram, it is easy to see that two beams are much more
stable in a tilted configuration than if the two beams are horizontally aligned. At
last, we were not able to find a compression only structure for the Semiramis islands
using this approach.
However, it would be interesting to further explore the possibilities of SA in this
area. For example, while we optimized over all nodes of the input mesh it might be
compelling to optimize in a smaller search space by parametrizing the mesh with
only a few parameters.
26
3.3. STRUCTURAL CONSTRAINT
(a) before optimization
CHAPTER 3. SHAPE OPTIMIZATION
(b) during optimization
(c) after optimization
Figure 3.9: Using Sensitivity Analysis to find a compression only shell for a dome.
Green = compression, red = tension.
27
Chapter 4
Conclusion
The architects wanted a tool that would allow them to find a shape for the Semiramis
islands through inverse design. The difficulty was to find a form for the islands that
would come close to the architect’s vision, but would consist of planar surfaces, since
the islands are assembled from wooden panels, and had to satisfy several geometrical
and structural constraints. Initially, it was planned to find this shape by means of a
simultaneous optimization across all these objectives. Due to the complexity of this
problem, we then decided to approach the problem in two steps. First, we wanted
to find a shape that consists of planar polygons and comes close to a smooth target
mesh designed by the architect. For this purpose we developed a new method that
allows the architect to interactively find a simplified form of the target mesh. In a
second step, the simplified mesh should be optimized to meet the geometrical and
structural requirements. Especially the structural constraint was a challenge because
we had to optimize the mesh based on the observation of the island in the static
equilibrium. This meant that we needed a physical model of the Semiramis islands.
For this purpose, we implemented a finite element simulation with discrete shells
to find the static equilibrium of the islands. Finally, we formulated a penalty term
for all constraints and were able to minimize them using sensitivity analysis. We
successfully showed that our optimization leads to a shape that meets all geometrical
constraints and is structurally more stable at the same time. In a next step, our
Rhino plugin has to be finalized to make our tools accessible for the architects.
28
Appendix A
Further Notes & Figures
A.1
Implementation Details
Our implementation is mainly based on Python. Python is often considered slow
because it is an interpreted programming language. However, it is often forgotten
that there are new technologies that can be used to significantly accelerate Python
code. In this thesis we have worked with Numba, for example. The developers
of Numba describe their library as an open source JIT compiler that translates a
subset of Python and NumPy code into fast machine code. Numba even allows you
to write CUDA code with Python, which has greatly accelerated the development
of our finite element GPU framework.
We generated the gradients and second-order tensors using Maple. Maple is a
leading software for symbolic calculations and can convert symbolic expressions into
code.
For the visualization of our results we developed a small 3D-plot library for
Jupyter notebooks. There are already many 3D-plot libraries for the Jupyter notebook environment, but they are limited to visualizations only and do not allow any
interaction with the displayed mesh. To the best of our knowledge our 3D plotting
library is the first one for Jupyter notebooks which allows you to move nodes in the
mesh. The library is mainly based on pythreejs, a python wrapper around the popular ThreeJS JavaScript library. However, our library is far from being published.
The main reason is that at the moment we have to send the whole mesh back and
forth between client and server for all interactions. The reason is that Jupyter Widgets are limited in their fundamental function when it comes to interactions that
only take place on the client side. A bright spot, however, is the PyIodide project,
which allows Python to run in a browser using WebAssembly. With this technology it would be possible in the future to make mesh interactions much more data
efficient.
To make our algorithms accessible to architects, we also had to implement a
Python-Rhino plugin. Since the Python environment in Rhino allows only limited
functionality, we had to make our tools accessible through a server. Therefore we
wrote a small message library which allows to exchange data between client and
server via the UDP protocol.
29
A.2. FIGURES
A.2
APPENDIX A. FURTHER NOTES & FIGURES
Figures
Figure A.1: Vegetale
30
Bibliography
1. Garland, M. & Heckbert, P. S. Surface Simplification Using Quadric Error
Metrics in Proceedings of the 24th Annual Conference on Computer Graphics
and Interactive Techniques (ACM Press/Addison-Wesley Publishing Co., USA,
1997), 209–216. isbn: 0897918967. https : / / doi . org / 10 . 1145 / 258734 .
258849.
2. Cohen-Steiner, D., Alliez, P. & Desbrun, M. Variational Shape Approximation.
ACM Trans. Graph. 23, 905–914. issn: 0730-0301. https://doi.org/10.
1145/1015706.1015817 (Aug. 2004).
3. Chen, D., Sitthi-amorn, P., Lan, J. T. & Matusik, W. Computing and Fabricating Multiplanar Models. Computer Graphics Forum 32, 305–315. eprint:
https://onlinelibrary.wiley.com/doi/pdf/10.1111/cgf.12050. https:
//onlinelibrary.wiley.com/doi/abs/10.1111/cgf.12050 (2013).
4. Poranne, R., Tarini, M., Huber, S., Panozzo, D. & Sorkine-Hornung, O. Autocuts: Simultaneous Distortion and Cut Optimization for UV Mapping. ACM
Trans. Graph. 36. issn: 0730-0301. https://doi.org/10.1145/3130800.
3130845 (Nov. 2017).
5. Poranne, R., Ovreiu, E. & Gotsman, C. Interactive Planarization and Optimization of 3D Meshes. Computer Graphics Forum 32, 152–163. eprint: https:
/ / onlinelibrary . wiley . com / doi / pdf / 10 . 1111 / cgf . 12005. https :
//onlinelibrary.wiley.com/doi/abs/10.1111/cgf.12005 (2013).
6. Zimmermann, S., Poranne, R. & Coros, S. Optimal control via second order
sensitivity analysis 2019. arXiv: 1905.08534 [math.OC].
7. Hauptmann, R. & Schweizerhof, K. A systematic development of ‘solid-shell’ element formulations for linear and non-linear analyses employing only displacement degrees of freedom. International Journal for Numerical Methods in Engineering 42, 49–69. eprint: https://onlinelibrary.wiley.com/doi/pdf/
10.1002/%28SICI%291097- 0207%2819980515%2942%3A1%3C49%3A%3AAIDNME349%3E3.0.CO%3B2-2. https://onlinelibrary.wiley.com/doi/abs/
10.1002/%28SICI%291097- 0207%2819980515%2942%3A1%3C49%3A%3AAIDNME349%3E3.0.CO%3B2-2 (1998).
8. Grinspun, E., Hirani, A. N., Desbrun, M. & Schröder, P. Discrete Shells in
Proceedings of the 2003 ACM SIGGRAPH/Eurographics Symposium on Computer Animation (Eurographics Association, San Diego, California, 2003), 62–
67. isbn: 1581136595.
9. Audoly, B. & Pomeau, Y. in, Oxford University Press (Jan. 2008).
31
BIBLIOGRAPHY
BIBLIOGRAPHY
10. Adriaenssens, S., Block, P., Veenendaal, D. & Williams, C. Shell Structures
for Architecture: Form Finding and Optimization isbn: 9780415840590 (Jan.
2014).
11. Panozzo, D., Block, P. & Sorkine-Hornung, O. Designing Unreinforced Masonry
Models. ACM Trans. Graph. 32. issn: 0730-0301. https://doi.org/10.1145/
2461912.2461958 (July 2013).
32