PMSG Machine Design & Control for Wide Speed Range
advertisement

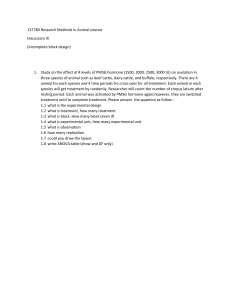
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/273168140 Machine design and control strategy for wide-speed-range PMSG systems Article in COMPEL International Journal of Computations and Mathematics in Electrical · January 2015 DOI: 10.1108/COMPEL-03-2014-0054 CITATIONS READS 6 331 2 authors: J. X. Shen Dongmin Miao Zhejiang University Zhejiang University 156 PUBLICATIONS 3,045 CITATIONS 17 PUBLICATIONS 165 CITATIONS SEE PROFILE All content following this page was uploaded by J. X. Shen on 22 September 2015. The user has requested enhancement of the downloaded file. SEE PROFILE COMPEL: The International Journal for Computation and Mathematics in Electrical and Electronic Engineering Machine design and control strategy for wide-speed-range PMSG systems Jianxin Shen Dong-Min Miao Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) Article information: To cite this document: Jianxin Shen Dong-Min Miao , (2015),"Machine design and control strategy for wide-speed-range PMSG systems", COMPEL: The International Journal for Computation and Mathematics in Electrical and Electronic Engineering, Vol. 34 Iss 1 pp. 92 - 109 Permanent link to this document: http://dx.doi.org/10.1108/COMPEL-03-2014-0054 Downloaded on: 14 January 2015, At: 21:43 (PT) References: this document contains references to 10 other documents. To copy this document: permissions@emeraldinsight.com The fulltext of this document has been downloaded 7 times since 2015* Access to this document was granted through an Emerald subscription provided by 453579 [] For Authors If you would like to write for this, or any other Emerald publication, then please use our Emerald for Authors service information about how to choose which publication to write for and submission guidelines are available for all. Please visit www.emeraldinsight.com/authors for more information. About Emerald www.emeraldinsight.com Emerald is a global publisher linking research and practice to the benefit of society. The company manages a portfolio of more than 290 journals and over 2,350 books and book series volumes, as well as providing an extensive range of online products and additional customer resources and services. Emerald is both COUNTER 4 and TRANSFER compliant. The organization is a partner of the Committee on Publication Ethics (COPE) and also works with Portico and the LOCKSS initiative for digital archive preservation. *Related content and download information correct at time of download. The current issue and full text archive of this journal is available on Emerald Insight at: www.emeraldinsight.com/0332-1649.htm COMPEL 34,1 Machine design and control strategy for wide-speed-range PMSG systems 92 Jian-Xin Shen and Dong-Min Miao Department of Electrical Engineering, Zhejiang University, Hangzhou, China Abstract Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) Purpose – The purpose of this paper is to focus on the machine design and control strategy of the permanent magnet synchronous generator (PMSG) system, especially utilized in variable speed applications, in order to stabilize the output voltage on the dc link over a wide speed range. Design/methodology/approach – Different ac/dc power converter topologies are comparatively studied, each with an accordingly designed PMSG, so as to investigate the influence of the armature winding inductance as well as the relationship between the PMSG and power converter topologies. Findings – Pulse width modulation (PWM) rectifier is preferable for the said application due to its good performance and controllability. Moreover, by employing the PWM rectifier, relatively large inductance of the PMSG is considered for both short-circuit current reduction and field regulation. Originality/value – Field-regulating control is realized with a space vector PWM (SVPWM) rectifier, which can weaken the PMSG magnetic field during high-speed operation, while even properly enhance the field at low speed, ensuring a small change of the PMSG output voltage and a stable dc voltage. Keywords Field-regulating, Permanent magnet synchronous generator, Power converter topology, PWM rectifier, Space vector pulse width modulation, Wide speed range Paper type Research paper COMPEL: The International Journal for Computation and Mathematics in Electrical and Electronic Engineering Vol. 34 No. 1, 2015 pp. 92-109 r Emerald Group Publishing Limited 0332-1649 DOI 10.1108/COMPEL-03-2014-0054 1. Introduction Permanent magnet synchronous generator (PMSG) systems are gaining extensive applications. A PMSG is often connected to an ac/dc power converter, and the obtained dc power is then directly utilized by a dc load, or further converted to ac power with a dc/ac converter (note, hereafter the dc/ac converter is also regarded as a special dc load). The PMSG is often driven by a variable-speed power plant, for example, when it is applied for wind energy (Chan and Lai, 2007), aircraft generator (Ning et al., 2012), vehicle alternator (Xia et al., 2011), and so on. In all these cases, the output voltage of the dc power (after the ac/dc converter) and/or the ac power (after the dc/ac converter) should be stable. However, in a PMSG, the permanent magnets excite a constant airgap field, thus the induced electromotive force (EMF) is proportional to the rotor speed. It is desirable to regulate the field with some techniques in order to stabilize the output of the variable-speed PMSG. In recent years, a variety of mechanical methods for field-regulating have been proposed (Capponi et al., 2009; Javadi and Mirsalim, 2008; Shen and Miao, 2013). Also, electromagnetic methods have been studied, using hybrid (electric and permanent magnet) excitation (Chau et al., 2006), or, injecting an extra field-regulating current into the PMSG armature windings with an individual inverter (Wu et al., 2006). This work was supported by the Natural Science Foundation of China (51377140, 51077116) and the National Basic Research Program of China (2013CB035604, 2011CB707204). Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) On the other hand, in the permanent magnet synchronous motor (PMSM) applications, field-weakening control, a type of field-regulation, has been widely used in order to extend the motor speed range under the restriction of a constant dc power supply. However, until now, few papers have concerned the field-regulating control in the PMSG systems. Although back-to-back power converter topology is proposed in the large-scale wind power PMSG, and field-weakening at the extended speed is mentioned, no detailed approaches have been addressed. This paper focusses on the variable-speed PMSG system, concerning the ac/dc power converter topologies as well as the machine designs. Both simulation and experimental verifications are presented. Machine design and control strategy 93 2. Ac/dc power converter topologies and machine designs There are three categories of ac/dc power converter topologies for the variable-speed PMSG, viz., the diode rectifier with a dc/dc converter, the thyrister rectifier, and the pulse width modulation (PWM) rectifier. According to the characteristics of each ac/dc converter, specific machine should be designed so that it can properly cooperate with the ac/dc converter. To illustrate the system design considerations, an aircraft PMSG system is taken as an example. Its dc output voltage is 270 V over a wide rotor speed range of 800B8,000 rpm. The rated dc power is 1.5 kW, thus, the PMSG rated power is designed as 1.65 kW by roughly considering the energy loss of the ac/dc converter. The outer diameter of the PMSG armature core is restricted to 200 mm, and the stack length is fixed at 100 mm. A. Using diode rectifier and dc/dc converter Figure 1 shows the PMSG system in which the dc/dc converter is used to boost or reduce the rectified dc voltage to the demanded voltage on the dc load. There are several types of dc/dc converters, such as the commonly used boost converter, the buck converter, and the boost/buck converter, which are shown in Figure 2. (1) Using boost converter. The output voltage Uo of the boost converter is always greater than the input voltage Ui, and, Ui is actually the output voltage of the diode rectifier. The duty cycle a of the switching device (such as MOSFET or IGBT) is given in (1), where ton is the turn-on time interval and T is the switching cycle: a¼ PMSG ton T ð1Þ dc/dc converter dc load Figure 1. PMSG system with diode rectifier and dc/dc converter COMPEL 34,1 (a) Ui switch dc load Uo dc load Uo 94 – (b) Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) switch Ui – (c) switch dc Uo load Ui Figure 2. Schematics of common dc/dc converters – Notes: (a) Boost converter; (b) Buck converter; (c) Boost/buck converter The relationship between the input and output voltages is: Uo T 1 ¼ ¼ Ui T ton 1 a ð2Þ In the studied system, the demanded Uo is 270 V, thus, the PMSG should be specifically designed to ensure that Ui at 8,000 rpm under no-load condition is slightly lower than 270 V, and a is approaching 0. Consequently, Ui at 800 rpm under load condition will be much lower than 270 V, and a must be rather approaching 100 percent. To satisfy these, a PMSG is accordingly designed, denoted as PMSG-1. It employs shaped permanent magnets on the rotor surface, as Figure 3 shows. Its armature inductances and resistance are small, being L ¼ 0.138 mH, M ¼ 0.035 mH, and R ¼ 0.0055 ohm, respectively. (2) Using buck converter. In this case, Uo is always less than Ui, and their relation is expressed in (3), assuming that the current in the inductor is continuous: Uo ton ¼a ¼ Ui T ð3Þ Machine design and control strategy Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) 95 Figure 3. Cross-section of PMSG The PMSG should then be designed to ensure that Ui at 800 rpm under load condition is slightly greater than 270 V with a approaching 100 percent. Thus, Ui at 8,000 rpm under no-load condition will be much greater than 270 V, and a must be close to 0. A machine (PMSG-2) is also accordingly designed, having the same stator core and the same rotor as the PMSG-1, but much more turns and thinner wire gauge of the armature windings (note, the PMSG-2 has the same slot-filling factor as the PMSG-1, and also as the PMSG-3 and -4 which will be described hereafter). Its armature inductances are L ¼ 28.3 mH and M ¼ 7.5 mH, and the resistance is R ¼ 1.0 ohm, all are much greater than those of the PMSG-1. (3) Using boost/buck converter. Figure 2(c) shows the basic schematic of a boost/ buck converter, in which the output is of the opposite polarity of the input. Here, Uo can be either greater or less than Ui, and their relation is given in (4): Uo ton a ð4Þ ¼ ¼ 1a Ui toff While using the same stator core and rotor as the PMSG-1, the PMSG-3 is specifically designed to ensure that, around the moderate speed (2,500 rpm) and load, Ui is 270 V with a being 0.5. Thus, at lower speed down to 800 rpm and under heavier load, the dc/dc converter works as a booster with a40.5, while at higher speed up to 8,000 rpm and under lighter load, the dc/dc converter works as a bucker with ao0.5. Compared with the above-mentioned two systems, the duty cycle of the boost/buck converter will not approach the extreme values of 100 percent or 0. Clearly, the design of PMSG-3 is between those of PMSG-1 and PMSG-2, having L ¼ 1.96 mH, M ¼ 0.55 mH, and R ¼ 0.071 O, respectively. (4) Comparative study. The design parameters of the three PMSGs are listed in Table I. The amplitude value of the line-line no-load voltage (i.e. the open-circuit induced EMF) of the PMSG at the maximum speed (8,000 rpm) is the maximum voltage COMPEL 34,1 Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) 96 Table I. Design parameters of studied PMSGs Stator core outer diameter (mm) Stator core inner diameter (mm) Stator stack length (mm) Rotor outer diameter (mm) Magnet thickness (mm) Magnet volume (cm3) Rotor inner diameter (mm) Number of stator slots Number of coils per phase Coils parallel branch Coil pitch/slot pitch Number of turns in series per phase Copper wire gauge (mm) PMSG-1 PMSG-2 PMSG-3 PMSG-4 200 124 100 120.2 6 159.1 35 24 4 1 5 18 f0.71 61 200 124 100 120.2 6 159.1 35 24 4 1 5 252 f0.63 6 200 124 100 120.2 6 159.1 35 24 4 1 5 68 f0.71 18 200 84 100 80 5 85.2 35 24 4 1 5 160 f0.71 13 imposed on the power devices; hence, it determines the device voltage rating. The maximum voltages for the three PMSGs are listed in Table II. Clearly, the device voltage rating for the PMSG-1 system can be 600 V only, and that for the PMSG-3 system should be at least 1,700 V. However, the maximum voltage (3,480 V) with the PMSG-2 system is much greater than the demanded dc voltage (270 V), and, it is very difficult to choose appropriate power devices with sufficient voltage rating. In practice, five or even more devices with a voltage rating of 1,200 V should be connected in series to perform as a single device. Further, the duty cycle a of the dc/dc converters at the maximum speed with no load is also listed in Table II. It is seen that a for the PMSG-1 and -2 systems is quite close to 0, hence, the dc/dc converters operation is not sufficiently stable, and the current and output voltage usually contain remarkable ripples. However, this is not the case for the PMSG-3 system with a boost/buck power converter. On the other hand, the line-line voltage at the minimum speed (800 rpm) with the rated load for each PMSG is less than one-tenth of the above-mentioned maximum voltage. Moreover, the phase angle of the armature current is uncontrollable by the diode rectifier, hence, the PMSG power factor is usually low due to the winding impedance. From this point of view, low self- and mutual-inductances of the armature windings are desired. When the PMSGs work at the minimum speed with the rated power, the machine voltage and current as well as the dc voltage after the diode rectifier are all given in Table III. The current rating of the power devices should be chosen according to these currents, which can be 150, 10 and 40 A for the PMSG-1, -2 and -3 systems, respectively. It is now seen that the power devices of the PMSG-3 system have both Table II. Specifications at 8,000 rpm with no load Machine Maximum voltage (V) Power device voltage rating (V) Dc voltage after diode rectifier (V) Duty cycle of dc/dc converter (%) PMSG-1 PMSG-2 PMSG-3 PMSG-4 245 3,480 920 270 600 1,200*5 1,700 600 245 3,480 920 – 9.3 7.8 22.7 – Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) moderate ratings of voltage and current, while those of the PMSG-1 system need a very large current rating (generally speaking, meaning higher cost and lower reliability), and those with the PMSG-2 system need an extraordinarily high voltage rating. Furthermore, as can be seen from Table III, the duty cycle a of the dc/dc converters for the PMSG-1 and -2 is very close to 100 percent, which may deteriorate the performance and reliability. But a for the PMSG-3 system is, as preferred, of a moderate value. From the above analysis, it can be concluded that, by considering the device rating of voltage (see Table II) or current (see Table III) as well as the duty cycle at the extreme speeds (see Tables II and III), the PMSG system using the diode rectifier and the buck or boost dc/dc converter is not really suitable for the wide-speed-range operation. However, the boost/buck converter, which seems the best to cooperate with the diode rectifier, is practically much more complicated than the schematic in Figure 2(c), hence, is usually expensive and of bulky volume. Moreover, the voltage rating of the boost/ buck converter devices is still much higher than the demanded dc voltage, boosting the cost and potentially reducing the reliability. On the other hand, the short-circuit current is another important issue to consider. Table IV gives the armature currents of the three PMSGs when they are short-circuited at the minimum and maximum speeds, each being much greater than the rated current. The short-circuit current is in direct proportion to the induced EMF, but is restricted by the armature winding impedance, of which the reactance should be the dominant part, since a low resistance is usually preferred so as to reduce the ohmic loss. From Table IV, it can be seen that the short-circuit current is hardly influenced by the machine speed because both the induced EMF and the winding reactance are in direct proportion to the speed, while the winding resistance is much smaller than the reactance. Therefore, on one hand, a high inductance is essential to achieve a low short-circuit current. And, on the other hand, as analyzed above, a low inductance is preferred to reduce the voltage variation when the PMSG is loaded, so that the PMSG maximum current at the minimum speed under the rated load is as low as possible. In conclusion, it is critical to compromise these two aspects when designing the PMSG system. Machine Armature current (RMS value) (A) Power device current rating (A) Dc voltage after diode rectifier (V) Duty cycle of dc/dc converter (%) PMSG-1 PMSG-2 PMSG-3 PMSG-4 63.1 4.44 16.9 12.5 150 10 40 30 18.2 291 76.7 – 93.3 92.8 77.9 – Machine At 800 rpm (A) At 8,000 rpm (A) PMSG-1 PMSG-2 PMSG-3 PMSG-4 325 25.1 92.7 25.7 356 25.5 94.6 25.8 Machine design and control strategy 97 Table III. Specifications at 800 rpm with rated power Table IV. Comparison of short-circuit armature current (RMS value) COMPEL 34,1 98 B. Using thyrister rectifier Among all kinds of power switches, the thyrister has, in general, the greatest voltage and current ratings, and is of low cost and high reliability. The thyrister rectifier can be regarded as a combination of the diode rectifier and the buck dc/dc converter. However, its dc output voltage is rich of ripple, especially when the triggering angle is large. The relation between the thyrister rectifier dc output voltage Udc and the PMSG line-line voltage amplitude Uab is as in (5): 3 Udc ¼ Uab cosat p ð5Þ Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) where at is the triggering angle. Clearly, for the application of the above-mentioned aircraft PMSG system, the generator should be designed as the same as the PMSG-2, or similar to the PMSG-2 but with a slightly lower induced EMF. Therefore, at the maximum speed of 8,000 rpm and with no load, the maximum voltage imposed on the thyrister is extraordinary (up to 3,480 V), making it very difficult to choose the thyristers with sufficient voltage rating. C. Using PWM rectifier The PWM rectifier is being extensively studied and applied. For most applications, it is powered by ac mains supply, which has both constant frequency and stable sine-wave voltage. Inductors are required between the mains power supply and the PWM rectifier. Here, the PWM rectifier is proposed to operate with a PMSG, as shown in Figure 4. In this case, the PMSG winding inductances is used to replace the inductors, therefore, they should be designed with an appropriate value. Moreover, the induced EMF vector E of the PMSG is equivalent to the ac voltage vector of the mains supply, while the terminal voltage vector U of the PMSG is equivalent to the voltage vector after the inductors, which is directly applied on the PWM rectifier. The PWM rectifier is a boost converter, say, its actual output dc voltage Udc is always higher than the dc voltage when all the power switches are turned off (i.e. when the PWM rectifier operates as a diode rectifier). From this point of view, the PMSG-1 is suitable for the PWM rectifier. However, a PMSG with higher induced EMF is proposed in this paper, as will be explained in Subsection 3-B. DC Load PMSG Figure 4. PMSG system with PWM rectifier ω, θ ia, ib, ic, Controller Udc Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) The PMSG system shown in Figure 4 is similar to a traditional PMSM system, except that in the PMSM system the power converter is a PWM inverter and the energy flows from the dc bus to the ac motor, while in the PMSG system the power converter is a PWM rectifier and the energy flows from the ac generator to the dc bus. For simplicity of analysis and control, the PMSG system can be regarded as a special PMSM system with a negative input power. Of course, the traditional space vector PWM (SVPWM) can be employed for the field-oriented control and magnetic field regulation of the PMSM and PMSG. As long as the PWM rectifier outputs a stable dc voltage Udc, the amplitude of the line-line voltage of the PMSG is always Udc, hence, the actual voltage imposed on the power devices does not change even if the PMSG speed and the PWM duty cycle vary. However, the PWM duty cycle changes the fundamental component of the PMSG terminal voltage, where the fundamental component can be denoted as the vector U. Large winding inductances are beneficial to lower the short-circuit current, but also possibly lead to large voltage variation when the PMSG is loaded. However, with PWM rectifier, this contradictory consideration is not really crucial, because the current vector I becomes controllable, hence, the voltage vector U is also under control. Thus, the inductances are actually designed to be large, in order to achieve good field-regulating effect, which is going to be examined later. Moreover, the imposed voltage on the power devices is proportional to the dc output voltage as long as the controller is working properly, hence, the voltage rating of the power devices can be determined according to the demanded dc voltage. For the abovementioned aircraft PMSG system, the voltage rating of the PWM rectifier devices can be 600 V only, since its actual imposed voltage is constantly 270 V even at the maximum speed with no load, as listed in Table II. For the wide-speed-range application, if the PMSG operates at high speed, field-weakening control can be applied in order to obtain an expected stable dc output voltage. However, at the very low speed, appropriate field-strengthening can be considered. To realize field weakening or strengthening, it is not necessary to use an additional power converter like what was proposed by (Wu et al., 2006). Instead, the field-regulating current, viz., a negative d-axis current (id) for field-weakening or a positive id for field-strengthening, can be easily injected into the PMSG armature windings with the PWM rectifier. The effectiveness of such field regulation has been verified in the previous work (Miao and Shen, 2012). The field regulation not only helps to output a stable dc voltage, but also extends the operational speed range. Nevertheless, demagnetization to the permanent magnets under field-weakening or magnetic saturation under field-strengthening must be considered during the machine design. To describe the field-weakening capability of the permanent magnet machine, a coefficient Km is defined as in (6), where cm is the flux linkage in the armature windings which is generated by the magnets, Im is the amplitude of the rated armature current, and Ld is the d-axis inductance: Km ¼ cm L d Im ð6Þ A smaller value of Km stands for a better field regulating capability if demagnetization or saturation has been avoided by proper machine design. In order to design a smaller Km, the PMSG magnetic load should be decreased while the electrical load should be Machine design and control strategy 99 COMPEL 34,1 Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) 100 increased, by decreasing the rotor size and magnets volume, and enlarging the stator size (e.g. reducing the stator inner diameter) to contain more turns of armature windings. Again, a prototype machine is designed, denoted as PMSG-4. It has the same structure as shown in Figure 4, and its parameters are listed in Table I. If its armature windings are open-circuited, its maximum line-line voltage at 8,000 rpm is 1,030 V. However, when it cooperates with the PWM rectifier, its maximum voltage is 270 V only, as already given in Table II (note, the PMSG-4 does not work together with a dc/dc converter, while the PWM rectifier duty cycle changes dynamically, hence, no duty cycle is listed in Table II). The inductances of the PMSG-4 are L ¼ 11.5 mH and M ¼ 2.3 mH, respectively, and the resistance is R ¼ 0.217 ohm. Its rated armature current (viz., that at the minimum speed of 800 rpm and under the rated load) is 12.5 A, hence, the current rating of the power devices is 30 A only, as listed in Table III. Moreover, the PMSG-4 has much better field-regulating capability than all the other three machines, as illustrated in Table V. Especially, if the armature current is fully utilized to weaken the field (i.e. id ¼ Im ¼ 17.7 A), finite element analysis (FEA) shows that the permanent magnets are still safe from being demagnetized. Moreover, the short-circuit currents of the PMSG-4 at the minimum and maximum speeds are also listed in Table IV, which are just twice the rated current and are usually acceptable. From this point of view, the PMSG-4 has better short-circuit performance than the other three machines, too. In summary, the PWM rectifier is the best option for the wide-speed-range PMSG system, on account of the synthetic concerns of good field-regulating capability, low short-circuit current and controllable voltage amplitude of the machine, as well as low voltage and current ratings of the power devices. Moreover, the ripple in the output dc voltage is minor. Therefore, the PMSG system with the PWM rectifier is further investigated in the following sections. 3. Simulation study A. PMSG modeling A PM synchronous machine, no matter it is a motor or a generator, always satisfies the voltage balancing equation as in (7): U ¼ E þ R I þ joLq Iq þ joLd Id ð7Þ where E is the induced EMF vector which is always located on the q-axis with an amplitude of ocm, while o is the electric angular speed, and o ¼ por, where p is the number of pole pairs of the machine, and or is the mechanical angular speed. Id and Iq are the d- and q-axis current vectors, namely, the two components of the stator current vector I, while their amplitudes are id and iq, respectively. Generally, when the machine operates as a motor, iq is positive and the machine input electric power is positive, too. While, both iq and the input electric power are negative when the machine runs as a Table V. Comparison of field-regulating capability Machine cm (Wb) Ld (mH) Im (A) Km PMSG-1 PMSG-2 PMSG-3 PMSG-4 0.0844 1.199 0.317 0.498 0.176 35.8 2.46 13.8 89.2 6.28 23.9 17.7 5.38 5.33 5.39 2.04 generator. In many cases, the voltage drop on the winding resistance is neglected so as to simplify the analysis, thus, the machine model can be expressed by the phasor diagrams in Figure 5, where (a) is of the PMSM and (b) is of the PMSG. Moreover, a positive value of id means that the armature current helps to strengthen the magnetic (a) Machine design and control strategy q 101 U jωLdId jωLqIq Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) E jωLdId U iq > 0 id < 0 iq > 0 Iq I I id > 0 Id Id (b) d q U jωLdId E jωLqIq jωLdId U Id Id d iq < 0 iq < 0 id < 0 id > 0 I Iq I Notes: (a) PMSM, solid lines showing field-strengthening and dashed lines showing field-weakening; (b) PMSG, solid lines showing field-strengthening and dashed lines showing field-weakening Figure 5. Phasor diagrams COMPEL 34,1 Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) 102 field, and vice versa. Thus, a proper id can be injected by the inverter to the PMSM or by the PWM rectifier to the PMSG in order to regulate the magnetic field. This further, as can be seen from Figure 5, affects the terminal voltage U in both aspects of amplitude and phase angle. For the PMSG system, U is also the fundamental component of the input ac voltage of the PWM rectifier. It should be pointed out that the actual PMSG terminal voltage is not of sine-wave, but contains pulses due to the PWM. B. Control strategy Figure 6 shows the system block diagram in the Matlab/Simulink environment. The PWM signals are generated by a closed-loop control and SVPWM module, which is detailed in Figure 7. The machine core saturation or the magnets demagnetization due to the field regulation is neglected. The machine core loss is not considered, though it actually reduces if field-weakening is applied. The power devices are considered as ideal switches. By ignoring the power loss of the PWM rectifier, the system power balancing can be expressed as (8): 3 ocm iq ¼ Udc Idc ð8Þ 2 The left hand of (8) is the electromagnetic power of the PMSG when neglecting the rotor saliency, which is the same as the machine output power if the winding resistance PWM Rectifier [PWM] Speed + w PMSG B i – + – + C – A m N S Figure 6. Block diagram of PMSG system in Simulink g A C – + C AC Current Sensors wm p [w] thetam p [theta] R B [Udc] m [iabc] v + – DC Voltage Sensor Rotor Position and Speed Measurement Udc id* ω Figure 7. Block diagram of closed-loop control and SVPWM module in Simulink Udc* ia ib ic uα* SVPWM PI U iq* – Udc ud* dq0 I + abc dq0 uq* αβ0 u * β id iq theta PWM Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) is neglected. The right hand is the dc link power. Clearly, the dc output voltage Udc is influenced by the product of o and iq, and also by the load condition. Therefore, in order to achieve the demanded Udc, iq should be adjusted dynamically with closed-loop control, such as the conventional PI control in Figure 7. Moreover, it seems that id should always be set to 0 since it is not related to Udc. However, when the machine speed o is higher than a certain threshold othr, the required q-axis current i*q should be extremely small. Nevertheless, the actual iq is out of control, being greater than the required i*q. This is because, at high speed, the induced EMF is also high, and, even if all the power devices are turned off, the diodes in the PWM rectifier will form a diode rectifier and naturally convert the ac voltage to dc voltage which is already higher than the demanded Udc. In other words, the high end of the speed range is limited to the threshold othr. Note, for the PMSG-4, othr is designed as a moderate value between the minimum (800 rpm) and the maximum (8,000 rpm) speed. However, this problem can be solved by injecting a negative id into the armature windings, which weakens the magnetic field inside the PMSG and reduce the amplitude of the terminal voltage U. This extra id will, of course, increase the winding ohmic loss, but is beneficial to extend the maximum operation speed, and also to reduce the machine core loss at high speed. The required d-axis current i*d should be generated automatically according to the machine model and the operation condition. When the actual speed is lower than othr, i*d is fixed as 0. However, when the actual speed is greater than othr, a negative i*d is required to restrict the amplitude of U vector to Udc/sqrt(3) (Liu et al., 2011). Thus, i*d can be calculated as in (9) if the winding resistance is not considered, where i*q should be determined in advance by the closed-loop control of Udc. In the simulation and experiment hereafter, i*d is either manually set so as to investigate its influence, or automatically determined as in (9): 8 < 0; qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi ooothr Udc 2 ð9Þ id ¼ cm ðLq iq Þ2 3o2 : ; oXo thr Ld On the other hand, from (8) it is seen that at the very low speed, as long as iq is large enough (of course the actual armature current should be limited below the rated value), the required dc voltage Udc can always be achieved, while id seems useless. However, in such a case, the duty cycle of the PWM rectifier usually approaches 0 or 100 percent, making the turn-on or turn-off period very short. This will deteriorate the rectifier operation condition and bring ripple to the dc voltage. To solve this problem, it is proposed here to inject a positive id to the PMSG armature windings, so as to strengthen the magnetic field in the PMSG and increase the voltage U. A trade-off is that both the stator iron loss and winding ohmic loss increase slightly. Nevertheless, such a trade-off is acceptable in practical applications. The key issue is to determine the value of id automatically, according to the machine parameters, speed and load condition. This will be discussed in detail in a future paper. When considering the winding resistance and rotor saliency of the PMSG, the power balancing model should be refined from (8). Furthermore, in the salient PMSG, id not only regulates the magnetic field but also contributes to the electromagnetic power. Therefore, the determination of id and iq is rather complicated. However, the determination for the non-salient PMSG can still be used, since the inaccuracy in the model (8) is located inside the Udc closed-loop, and the demanded Udc can still be Machine design and control strategy 103 COMPEL 34,1 Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) 104 achieved. Of course, with this model simplification, the PMSG armature current may become slightly higher. C. Simulation results The PMSG-4 and PWM rectifier system which uses the above control strategy is analyzed with Simulink simulation. Figure 8 shows the maximum allowable speed when the machine is fed with different field-weakening current id. Clearly, to achieve a low dc voltage, the maximum operation speed is limited. Moreover, the lower the fieldweakening effect is, the lower the maximum speed. This agrees with the aboveaddressed analysis. Note, the maximum allowable speed with id ¼ 0 is actually the threshold speed othr. Figure 9 shows the dc output voltage when the PMSG-4 runs at different speeds (800, 3,200, 5,600 and 8,000 rpm, respectively) with different i*d. When i*d is fixed at 0, only at the low speed of 800 rpm the dc voltage of 270 V can be achieved, while the dc voltage is out of control if the speed is 3,200 rpm or higher. However, when i*d is fixed at 30 A, the dc voltage of 270 V can always be obtained over the full speed range. This agrees with Figure 8. On the other hand, if i*d is dynamically determined by (9), the dc voltage of 270 V can still be obtained, however, its armature current and ohmic loss will be lower than those when i*d is fixed at 30 A. Therefore, a dynamic i*d is preferable. It should be pointed out that, in order to achieve the 1.5 kW and 270 V dc outputs at the maximum speed of 8,000 rpm, i*q should be 1.2 A as derived from (8), and i*d should be 30 A as seen from Figure 8. Hence, the armature current RMS value will be 21.2 A, greater than the pre-determined value of 12.5 A which has been listed in Table III. However, it is acceptable to enlarge the rated current of the PMSG-4 from 12.5 A to 21.2 A, because the winding current density is still 4.1 A/mm2 only, and, as concluded from FEA (see Figure 10), the permanent magnets are still safe from being demagnetized. However, the current rating of the PWM rectifier devices should be increased to 50 A. Moreover, id does cause extra ohmic loss in the windings. 4. Experimental investigation A test bench, as shown in Figure 11, is built to experimentally verify the PMSG and PWM rectifier system. Instead of the PMSG-4, an existing PMSG 8,000 Figure 8. Relationship between maximum operation speed and field-weakening current Maximum Speed (rpm) 7,000 Udc*= 270V Udc*= 150V Udc*= 100V 6,000 5,000 4,000 3,000 2,000 1,000 0 –30 –20 –10 Field-weakening Current id* (A) 0 Machine design and control strategy Rotating Speed (rpm) 9,600 8,000 6,400 4,800 3,200 1,600 105 800 600 400 200 DC Voltage (V) with id* = –30A 0 300 DC Voltage (V) with Dynamic id* Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) DC Voltage (V) with id* = 0A 0 1,000 250 200 150 100 50 0 300 250 200 150 100 50 0 Figure 9. Simulation results of dc output voltage at different speed with different id Time (0.1s/div) B (T) 1.2 1.1 1.0 0.9 0.8 0.7 0.6 0.5 0.4 0.3 in the laboratory is used as an example. Its parameters include: Ld ¼ 1.41 mH, L q ¼ 0.33 mH, R ¼ 0.3 ohm, cm ¼ 0.0215 Wb, p ¼ 5, and its speed range is 300B3,000 rpm. The PMSG is driven by an inverter-fed induction motor. A low demanded dc voltage (5 V) is set so as to investigate the field-weakening effect Figure 10. Flux density in magnetization direction inside magnet with id ¼ 30 A and iq ¼ 1.2 A COMPEL 34,1 Induction Motor 106 PMSG Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) DC Load Figure 11. Test bench Central Control Unit PWM Rectifier at a relatively low speed. Resistors are connected to the dc output of the PWM rectifier as the load. Both simulation and test results are presented in Figure 12(a). The step-changing speed command is set into the inverter, while the actual speed of the induction motor and the PMSG changes slowly due to the moment of inertia. i*d is determined with (9), and the dc output voltage from experiment agrees well with that from simulation, although improvement of the PI closed-loop control is expected to further dynamically stabilize the dc voltage. Also, waveforms of the PMSG line-line voltage and dc voltage, as well as that of the PMSG armature current, are all shown in Figure 12(b). Clearly, the voltage amplitude on the power devices of the PWM rectifier is the same as the dc voltage, but much lower than the induced EMF at the maximum speed. 5. Conclusions The PMSG systems have gained extensive applications, especially for the variable-speed situations. Various power converter topologies utilized in the PMSG systems, such as the diode rectifier with three different dc/dc converters, the thyrister rectifier, and the PWM rectifier, are introduced, while the design considerations of the corresponding PMSGs are addressed. It has been seen that the PMSG system with a PWM rectifier is prior to use for the wide-speed-range applications, considering the voltage change due to load, the short-circuit current, the voltage and current ratings of the power devices, and the extension of the operation speed range. Performance of the PMSG system with the field-regulation by the PWM rectifier is investigated by both Matlab/Simulink simulation and experiment, validating the good workability and controllability. More studies regarding the field-strengthening at low operation speed and the determination of the d- and q-axis currents of the salient PMSG will be reported in future papers. d-axis Current Reference id* (A) Machine design and control strategy 3,500 3,000 2,500 2,000 1,500 1,000 500 0 20 107 10 0 –10 –20 DC Voltage by Experiment (V) DC Voltage by Simulation (V) 20 15 10 5 0 20 15 10 5 0 Time (20s/div) Line-Line Voltage and DC Voltage (V) (b) 10 8 6 4 2 0 –2 –4 –6 –8 dc voltage Line-Line voltage 20 Armature Current (A) Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) Rotating Speed Command (rpm) (a) 10 0 –10 –20 Time (0.001s/div) Notes: (a) Performance over the full speed range; (b) Voltage and current wavforms at 3,000 rpm Figure 12. Simulation and test results COMPEL 34,1 108 References Capponi, F.G., Terrigi, R., Caricchi, F. and Ferraro, L.D. (2009), “Active output voltage regulation for an ironless axial-flux PM automotive alternator with electromechanical flux weakening”, IEEE Transactions on Industry Applications, Vol. 45 No. 5, pp. 1785-1793. Chan, T.F. and Lai, L.L. (2007), “An axial-flux permanent-magnet synchronous generator for a direct-coupled wind-turbine system”, IEEE Transactions on Energy Conversion, Vol. 22 No. 1, pp. 86-94. Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) Chau, K.T., Li, Y.B., Jiang, J.Z. and Niu, S.X. (2006), “Design and control of a PM brushless hybrid generator for wind power application”, IEEE Transactions on Magnetics, Vol. 42 No. 10, pp. 3497-3499. Javadi, S. and Mirsalim, M. (2008), “A coreless axial-flux permanent-magnet generator for automotive applications”, IEEE Transactions on Magnetics, Vol. 44 No. 12, pp. 4591-4598. Liu, H.S., Zhu, Z.Q., Mohamed, E., Fu, Y.L. and Qi, X.Y. (2011), “Comparison of drive performance of PM synchronous machine fed by inverters with different PWM strategies in constant torque and constant power regions”, Conference Record of 2011 IEEE International Electric Machines and Drives Conference, Niagara Falls, Ontario, pp. 1334-1339. Miao, D.M. and Shen, J.X. (2012), “Simulation and analysis of a variable speed permanent magnet synchronous generator with flux weakening control”, Conference Record of International Conference on Renewable Energy Research and Application, Nagasaki, pp. 1-6. Ning, Y.H., Liu, C., Jiang, R.H., Xu, J.C. and Zhu, S.S. (2012), “A novel tangential radial hybrid excitation synchronous variable frequency aircraft generator”, Conference Record of 15th International Conference on Electrical Machines and Systems, Sapporo, pp. 1-5. Shen, J.X. and Miao, D.M. (2013), “Variable speed permanent magnet synchronous generator systems and control strategies”, Transactions of China Electrotechnical Society, Vol. 28 No. 13, pp. 1-8. Wu, Y.Y., Sun, X.D. and Chai, J.Y. (2006), “Voltage control of permanent-magnet/reluctance generator”, Advanced Technology of Electrical Engineering and Energy, Vol. 25 No. 4, pp. 63-66. Xia, Y.Y., Ahmed, K.H. and Williams, B.W. (2011), “A new maximum power point tracking technique for permanent magnet synchronous generator based wind energy conversion system”, IEEE Transactions on Power Electronics, Vol. 26 No. 12, pp. 3609-3620. About the authors Dr Jian-Xin Shen received the BS and MS degrees from the Xi’an Jiaotong University, China in 1991 and 1994, respectively, and the PhD degree from the Zhejiang University, China in 1997. He was with the Nanyang Technological University, Singapore (1997-1999), the University of Sheffield, UK (1999-2002), and IMRA Europe SAS, UK Research Centre, UK (2002-2004). Since 2004 he has been a Professor of Electrical Engineering at the Zhejiang University. His main research interests include design, control and applications of electrical machines and drives, and renewable energies. Dr Jian-Xin Shen is the corresponding author and can be contacted at: J_X_Shen@zju.edu.cn Downloaded by ZHEJIANG UNIVERSITY At 21:43 14 January 2015 (PT) Dong-Min Miao received the BS degree in Electrical Engineering from the Zhejiang University, China in 2011. She is currently pursuing the PhD degree at the Zhejiang University. Her research interests include machine design and control strategy of permanent magnet synchronous generator system. For instructions on how to order reprints of this article, please visit our website: www.emeraldgrouppublishing.com/licensing/reprints.htm Or contact us for further details: permissions@emeraldinsight.com View publication stats Machine design and control strategy 109