See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/349721510
Introduction to Wave Physics
Book · March 2021
CITATIONS
READS
0
2,566
1 author:
Anthony L Gerig
Viterbo University
25 PUBLICATIONS 174 CITATIONS
SEE PROFILE
All content following this page was uploaded by Anthony L Gerig on 06 March 2021.
The user has requested enhancement of the downloaded file.
Introduction to Wave Physics
Anthony L. Gerig, Ph.D.
ii
©
Copyright
2021 Anthony L. Gerig
All rights reserved.
Dedication
To Julie, Clayton, Gretchen and my students
iii
iv
DEDICATION
Contents
Dedication
iii
Preface
ix
1 One-dimensional Waves
1.1 Wave Functions . . . . . . . . . . .
1.2 Harmonic Waves . . . . . . . . . .
1.3 Complex Representation . . . . . .
1.4 Interference . . . . . . . . . . . . .
1.5 One-dimensional Wave Equation . .
1.5.1 Wave Equation for a String
1.5.2 Separation of Variables . . .
1.6 Fourier Transforms . . . . . . . . .
1.7 Energy Transmission . . . . . . . .
1.8 Reflection and Transmission . . . .
1.9 Finite Media . . . . . . . . . . . . .
1.9.1 Fixed Strings . . . . . . . .
1.9.2 Free Strings . . . . . . . . .
1.9.3 Joined Strings . . . . . . . .
1.10 Radiation . . . . . . . . . . . . . .
1.11 Vector Waves and Polarization . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
2
4
7
9
13
14
15
18
21
22
26
26
30
33
34
37
2 Three-dimensional Wave Functions
2.1 Three-dimensional Wave Equations
2.2 Separable Solutions . . . . . . . . .
2.2.1 Rectangular Wave Functions
2.2.2 Spherical Wave Functions .
2.2.3 Cylindrical Wave Functions
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
41
41
44
45
49
60
v
vi
CONTENTS
2.3
Energy Transmission . . . . . . . . . . . . . . . . . . . . . . . 65
2.3.1 Acoustic (Scalar) Intensity . . . . . . . . . . . . . . . . 65
2.3.2 Electromagnetic (Vector) Intensity . . . . . . . . . . . 69
3 Interference
73
3.1 Plane Waves . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.2 Spherical Waves . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.3 Application: Linear Arrays . . . . . . . . . . . . . . . . . . . . 80
4 Reflection and Transmission
4.1 Plane Waves at Normal Incidence
4.1.1 Acoustic Waves . . . . . .
4.1.2 Electromagnetic Waves . .
4.2 Plane Waves at Oblique Incidence
4.2.1 Acoustic Waves . . . . . .
4.2.2 Electromagnetic Waves . .
4.3 Non-Plane Waves . . . . . . . . .
5 Cavities and Waveguides
5.1 Rectangular Cavity . .
5.1.1 Acoustic . . . .
5.1.2 Electromagnetic
5.2 Cylindrical Cavity . .
5.3 Spherical Cavity . . . .
5.4 Rectangular Waveguide
5.4.1 Acoustic . . . .
5.4.2 Electromagnetic
5.5 Cylindrical Waveguide
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6 Radiation
6.1 Boundary Condition Method . . . . . .
6.1.1 Pulsating Sphere . . . . . . . .
6.1.2 Vibrating Sphere . . . . . . . .
6.1.3 Sources Near Boundaries . . . .
6.2 Inhomogeneous Wave Equation Method
6.2.1 Radiation by Point Sources . .
6.2.2 Radiation by Extended Sources
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
87
88
88
90
92
92
97
102
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
103
. 104
. 104
. 108
. 113
. 117
. 122
. 122
. 128
. 132
.
.
.
.
.
.
.
135
. 135
. 136
. 138
. 140
. 140
. 143
. 149
CONTENTS
7 Diffraction
7.1 Kirchoff Diffraction Theory
7.2 Rectangular Aperture . . . .
7.3 Circular Aperture . . . . . .
7.4 Multiple Apertures . . . . .
vii
.
.
.
.
.
.
.
.
.
.
.
.
8 Scattering
8.1 Scattering Terminology . . . . . .
8.2 Boundary Condition Method . . .
8.3 Inhomogeneous Medium Method
8.4 Kirchoff Method . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
159
. 159
. 165
. 169
. 172
.
.
.
.
177
. 177
. 180
. 187
. 193
viii
CONTENTS
Preface
This book developed out of a one-semester course on Waves and Optics that I
taught junior and senior physics majors at Viterbo University. I had planned
to adopt a text for the course that would prepare students both for further
work in the areas of acoustics, electromagnetics and optics, and for the rigors of a senior-level course in quantum mechanics. However, I had difficulty
finding an undergraduate-level textbook that addressed all three topics of
radiation, diffraction and scattering, and that consistently covered material
in three dimensions. I therefore chose not to require a textbook and instead
pulled material from various sources to produce course notes that were distributed to the class. Former students who were doing graduate research
or were employed in the areas described above often mentioned that they
were continuing to use the notes in the course of their work. Consequently, I
decided to to make the notes more usable by converting them into this text.
The book is designed to proceed from simple to complex, using onedimensional waves to introduce major concepts in the first chapter, and extending each of those concepts to three dimensions in subsequent chapters
for rectangular, cylindrical and spherical coordinates. Both scalar and vector waves are addressed, using acoustic waves as the primary example of
the former and electromagnetic/optical waves as the primary example of the
latter.
Because three-dimensional waves are covered extensively, readers should
be familiar with multivariable calculus and have some exposure to curvilinear
coordinates. Courses in differential equations, mid-level mechanics and midlevel electricity/magnetism are helpful, but not required.
ix
x
PREFACE
Chapter 1
One-dimensional Waves
Waves are interesting, but also vital, natural phenomena. They are commonly the physical mechanism that is responsible whenever energy or information is transmitted from one location to another. Without them, there
would be no light or sound, and many modern technologies would be nonexistent, including radio communication, microwave ovens, medical ultrasound,
X-ray imaging, radar, sonar, fiber-optics, etc.
Fundamentally, a wave is a variation, or a change, in a physical quantity
that propagates through space over time. For example, when a stone strikes
the surface of a body of water, it creates movement, or a displacement, in the
water at that location. That displacement, however, isn’t confined to a single
location. The moving water exerts a force on the surrounding water, which
causes it to become displaced. That water exerts a force on the neighboring
water, which causes it to become displaced and so on. In this manner, the
displacement propagates outward from the location of the strike in the form
of expanding circular ripples on the surface of the water.
There are many physical quantities that will propagate when varied.
Waves can be classified according to whether the propagating quantity is
a scalar, vector or tensor. Examples of propagating scalar quantities include
fluid pressure, which is experienced as sound, and the quantum mechanical wave function for a spin-less particle. Examples of propagating vector
quantities include electromagnetic fields, which are experienced as light, and
material displacements like that described above for water. An example of a
propagating tensor quantity is the metric tensor associated with gravity.
Waves can be further categorized according to whether the propagation occurs in one, two or three spatial dimensions. An example of a one1
2
CHAPTER 1. ONE-DIMENSIONAL WAVES
dimensional wave is a displacement wave propagating along a plucked string.
A good example of a two-dimensional wave is the one described above: a displacement wave propagating across the surface of a body of water. Examples
of three-dimensional waves include an electromagnetic/optical wave propagating outward from an antenna, or a pressure/acoustic wave propagating
outward from a speaker.
The primary purpose of this book is to introduce the reader to the fundamental aspects of wave behavior and the mathematics necessary to describe
that behavior. It focuses on three-dimensional waves due to their importance
and prevalence. However, the first chapter introduces many of the foundational concepts using one-dimensional waves, with displacement waves on a
string as the primary example, because they ease the reader into the required
mathematics. The remaining chapters extend the concepts to three dimensions, using acoustic waves as the primary example of a three-dimensional
scalar wave and electromagnetic waves as the primary example of a threedimensional vector wave.
1.1
Wave Functions
A wave is represented mathematically by a wave function, which is a mathematical function that yields the value of the propagating quantity at each
location in space for any given time. It can be determined intuitively for most
one-dimensional waves. Consider, for example, a Gaussian pulse propagating
on a string with speed v as illustrated in Figure 1.1. The figure plots the
displacement of the string ψ as a function of position x, which is called the
waveform, both initially and at a later time t. (Note that although displacement is a vector quantity ψ that can point in any direction perpendicular
to the string, here it is constrained to the plane of the page to simplify the
mathematics and can be represented by a scalar ψ.) For a Gaussian pulse,
the initial waveform is given by the function:
x2
ψ(x) = Ae− 2σ2
where σ is a measure of the pulse width. The shape of the waveform at t is
identical, but shifted in the positive x direction a distance vt. The function
for this waveform can therefore be obtained by subtracting vt from x in the
original function:
ψ(x)
1.1. WAVE FUNCTIONS
3
vt
x
Figure 1.1: A pulse propagating on a string in the positive x direction with
speed v.
ψ(x, t) = Ae−
(x−vt)2
2σ 2
Because the value of t is arbitrary, this function yields the displacement of
the string at each location in space for any time and is therefore the wave
function for the pulse. For a pulse traveling in the opposite direction, the
wave function is obtained by adding vt rather than subtracting it. The
process is identical for any other wave on the string, so the wave function
can be written generally as:
ψ(x, t) = f (x ± vt)
where the function f specifies the shape of the initial waveform.
(1.1)
4
CHAPTER 1. ONE-DIMENSIONAL WAVES
The propagation speed for most waves is determined by the properties
of the medium, or material, through which they propagate. For displacement waves, the propagation speed is higher when medium elements respond
quickly to the movement of neighboring elements, which occurs when they are
lighter and the forces exerted between them are stronger. The propagation
speed for a displacement wave on a string is given by:
s
T
(1.2)
v=
µ
where T is the tension in the string and µ is the linear mass density of the
string. The lower the mass density and the higher the tension, the faster the
propagation.
1.2
Harmonic Waves
When a propagating quantity oscillates harmonically, it produces a specific
type of wave called a harmonic wave. Imagine, for example, that the displacement of a string at the origin is given by:
2π
t = A cos 2πf t
T
where A is the amplitude, or maximum displacement, of the string, T is the
period, or the time it takes to complete one cycle, and f is the frequency,
which is the inverse of the period and a measure of the number of cycles
completed per unit time. The top pane of Figure 1.2 illustrates the motion.
Because the motion propagates, the displacement at every other location
along the propagation direction is also harmonic, but delayed by a time equal
to the distance from the origin divided by the propagation speed. Assuming
propagation in the positive x direction, the displacement at the location x is
therefore given by:
ψ(t) = A cos
x
ψ(x, t) = A cos 2πf (t − )
v
2πf
ψ(x, t) = A cos
(vt − x)
v
2πf
ψ(x, t) = A cos
(x − vt)
v
1.2. HARMONIC WAVES
5
ψ(t)
T
A
t
ψ(x)
λ
A
x
Figure 1.2: Harmonic motion of a string element (top) and the initial waveform produced by the motion (bottom).
which is the wave function for the harmonic wave.
Inserting t = 0 into the wave function to get the initial waveform yields:
ψ(x) = A cos
2πf
x
v
which is plotted in the bottom pane of Figure 1.2. The distance between
identical displacements on the waveform is called the wavelength λ, and is
equal to the distance the displacement at a given location propagates away
in the time it takes the string at that location to complete one cycle and
return to the same displacement:
λ = vT =
v
or v = f λ
f
(1.3)
6
CHAPTER 1. ONE-DIMENSIONAL WAVES
Notice that because the wavelength and period are proportional, the wavelength and frequency are inversely related quantities, meaning that if one
increases, the other decreases by the same factor.
Substituting the wavelength into the wave function and accounting for
the possibility of propagation in the negative x direction:
ψ(x, t) = A cos
2π
(x ± vt)
λ
Using Equation 1.3, this can be rewritten as:
v
2π
x ± 2π t)
λ
λ
2π
ψ(x, t) = A cos ( x ± 2πf t)
λ
ψ(x, t) = A cos (kx ± ωt)
ψ(x, t) = A cos (
where k = 2π/λ is called the wavenumber and ω = 2πf the angular frequency
of the harmonic wave. The two can be related using Equation 1.3:
ω = kv
(1.4)
Because the cosine function is even, A cos (kx + ωt) = A cos (−kx − ωt) and
the wave equation can be recast as:
ψ(x, t) = A cos (±kx − ωt)
where the positive sign indicates propagation in the positive x direction and
the negative sign propagation in the negative x direction (the reason for
switching the location of the ± will become clear later). Finally, the wave
function above assumes that the displacement of the string at the origin is
initially at a maximum (ψ(0, 0) = A) as illustrated in the top pane of Figure
1.2. If this is not the case, a phase angle φ (often referred to simply as the
phase) is required in the argument of the wave function to shift the curve to
a different initial displacement (ψ(0, 0) = A cos(φ)). Including it yields the
wave function for a harmonic wave in its most general form:
ψ(x, t) = A cos (±kx − ωt + φ)
(1.5)
1.3. COMPLEX REPRESENTATION
1.3
7
Complex Representation
An imaginary number is the square root of any negative number and is
written in the following manner:
√
√ √
−n = n −1 = bi
where
√
√
i = −1 and b = n
A complex number is a number with real and imaginary parts, and is expressed as:
a + bi
where
Re(a + bi) = a and Im(a + bi) = b
Taking the complex conjugate of a complex number is defined as reversing the
sign on its imaginary part by flipping the sign in front of i, and is represented
by a superscript asterisk:
(a + bi)∗ = a − bi
Complex numbers can be plotted in two dimensions as shown in Figure 1.3,
where the real part is the horizontal coordinate and the imaginary part the
vertical coordinate. As illustrated in the figure, the complex number can
also be represented as a vector called a phasor with magnitude A and angle
θ given by:
√
a2 + b2 and θ = tan−1 b/a
or
a = A cos θ and b = A sin θ
A=
(1.6)
(1.7)
Euler’s identity expresses a complex exponential as a complex number,
and can be derived by Taylor expanding the exponential:
8
CHAPTER 1. ONE-DIMENSIONAL WAVES
Figure 1.3: Plot of a complex number in two dimensions.
(iθ)0 (iθ)1 (iθ)2 (iθ)3
+
+
+
...
0!
1!
2!
3!
1
1
= (1 − θ2 + ...) + i(θ − θ3 + ...)
2
6
= cos θ + i sin θ
eiθ =
(1.8)
Making use of Euler’s identity, any complex number can be written in terms
of its phasor magnitude and angle using a complex exponential:
a + bi = A cos θ + iA sin θ = Aeiθ
(1.9)
Using this expression, any harmonic wave function can be written as the real
part of a complex number:
1.4. INTERFERENCE
9
Re(Aei(±kx−ωt+φ) ) = A cos (±kx − ωt + φ) = ψ(x, t)
(1.10)
which is referred to as its complex representation. Equivalently, it is the
horizontal component of a phasor as in Figure 1.3 with θ = ±kx−ωt+φ. For
simplicity, it is common practice to drop the real operator when working with
the complex representation as long as the mathematics are not affected and it
is understood that the imaginary part is extraneous. The phase angle is also
commonly combined with the amplitude to produce a complex amplitude:
ψ(x, t) = Aei(±kx−ωt+φ) = Aeiφ ei(±kx−ωt) = Ãei(±kx−ωt)
The benefit of using the complex/phasor representation for harmonic
wave functions is that mathematical operations are generally easier to perform on an exponential/vector than a cosine function. In particular, derivatives and integrals can be applied simply by adding or removing factors of
the exponent. Adding and subtracting harmonic wave functions is also much
easier using phasors, as will be demonstrated in the next section.
1.4
Interference
When multiple waves encounter one another at the same location, they interact to produce a combined wave in a phenomenon defined as interference.
The Superposition Principle dictates that the combined wave is simply the
sum of the interfering waves.
As an example, consider the interference between two identical harmonic
waves with different phase angles whose wave functions are given by:
ψ1 = Aei(kx−ωt) and ψ2 = Aei(kx−ωt+φ)
The combined wave function is therefore:
ψ = ψ1 + ψ2
= Aei(kx−ωt) + Aeiφ ei(kx−ωt)
= (A + Aeiφ )ei(kx−ωt)
where the sum of the complex amplitudes for the interfering waves yields
the complex amplitude for the combined wave, and can be found by adding
10
CHAPTER 1. ONE-DIMENSIONAL WAVES
their phasors as illustrated in Figure 1.4. Because the three phasors form an
isosceles triangle, the phase angle for the combined wave is given by:
φc = φ/2
(1.11)
The amplitude for the combined wave is determined by applying Equation 1.6
to the real (A+A cos φ) and imaginary (A sin φ) components of the resultant,
and using the trigonometric identity cos x = 2 cos2 (x/2) − 1 to simplify the
result:
p
(A + A cos φ)2 + (A sin φ)2
p
= 2A2 + 2A2 cos φ
p
= 2A2 + 2A2 [2 cos2 (φ/2) − 1]
= 2A cos(φ/2)
Ac =
(1.12)
Notice that when the phase difference between the interfering waves φ is
zero or an even multiple of π, all three phasors in Figure 1.4 align, meaning
that their corresponding wave functions also align as illustrated in Part (a)
of Figure 1.5. The interfering waves are therefore said to be in phase. The
amplitude of the combined wave in this case is simply the sum of the amplitudes of the interfering waves (Ac = 2A), which is also its maximum value.
Because the interfering waves reinforce one another, this type of interference
is called constructive. When the phase difference is an odd multiple of π,
the phasors for the interfering waves and their corresponding wave functions
in Part (b) of Figure 1.5 are anti-aligned. The amplitude of the combined
wave is therefore the difference between the amplitudes of the interfering
waves (Ac = 0). Because the interfering waves cancel each other, this type
of interference is called destructive. Between these two extremes, there is
no alignment between the phasors or their corresponding wave functions as
illustrated in Part (c) of Figure 1.5, and the interfering waves are said to
be out of phase. The amplitude of the combined wave is also between the
extremes and the interference is therefore called incomplete.
As another example, consider the interference between two identical harmonic waves traveling in opposite directions whose wave functions are given
by:
ψ1 = Aei(kx−ωt) and ψ2 = Aei(−kx−ωt)
1.4. INTERFERENCE
11
c
c
Figure 1.4: Addition of phasors representing the complex amplitudes of interfering harmonic waves, where the resultant represents the complex amplitude
of the combined wave.
The combined wave function is therefore:
ψ = ψ1 + ψ2
= Aeikx e−iωt + Ae−ikx e−iωt
= A(eikx + e−ikx )e−iωt
Applying Euler’s identity:
= A[cos kx + i sin kx + cos (−kx) + i sin (−kx)]e−iωt
= 2A cos (kx)e−iωt
CHAPTER 1. ONE-DIMENSIONAL WAVES
ψ(x)
12
ψ(x)
(a) x
ψ(x)
(b) x
(c) x
Figure 1.5: Interfering (dashed and dotted) and combined (solid) harmonic
wave functions at t = 0 for (a) constructive interference, (b) destructive
interference, and (c) incomplete interference when φ = π/4.
Taking the real part:
ψ = 2A cos (kx) cos ωt
Notice that every point on the string now has the same time dependence
(cos ωt), meaning that they all oscillate in unison. There no delay between
the movement at one location and the corresponding movement at another
location farther down the string, implying that the displacement no longer
propagates. This type of wave is therefore referred to as a standing wave. In
addition, the amplitude of the oscillation is no longer uniform, but varies with
location on the string according to the absolute value of the leading term in
the wave function |2A cos kx|. Whenever kx = nπ or x = n(λ/2) where n is
1.5. ONE-DIMENSIONAL WAVE EQUATION
13
an integer, the amplitude takes on its maximum value of 2A. These locations
occur every half-wavelength, and are called anti-nodes. Whenever kx =
(n+1/2)π or x = (n+1/2)(λ/2), the amplitude is equal to zero and the string
is motionless. These locations also occur every half-wavelength between the
anti-nodes, and are called nodes. Figure 1.6 illustrates the motion of the
string, highlighting node and anti-node locations.
Antinode
ψ(x)
N ode
t =0
(1/8)T
(3/8)T
(1/2)T
x
Figure 1.6: A standing wave on a string generated by interfering harmonic
waves traveling in opposite directions. The waveform is shown at several
different times to illustrate the motion.
1.5
One-dimensional Wave Equation
Not all varying physical quantities propagate. The only ones that produce
waves are those whose dynamics are governed by the wave equation, which
14
CHAPTER 1. ONE-DIMENSIONAL WAVES
in one-dimension is given by:
∂ 2ψ
1 ∂ 2ψ
=
∂x2
v 2 ∂t2
(1.13)
where v is the propagation speed.
1.5.1
Wave Equation for a String
Consider string displacement as an example. Figure 1.7 shows a representative string element of length dx under tension T with mass density µ.
The vertical displacement of the string ψ is governed by the component of
Newton’s second law in that direction:
Figure 1.7: A representative string element of length dx under tension T
with mass density µ.
1.5. ONE-DIMENSIONAL WAVE EQUATION
X
15
Fψ = maψ
From the figure:
∂ 2ψ
T sin θx+dx − T sin θx = (µdx) 2
∂t
µ ∂ 2ψ
sin θx+dx − sin θx
=
dx
T ∂t2
Applying the small angle approximation sin θ ≈ tan θ:
µ ∂ 2ψ
tan θx+dx − tan θx
=
dx
T ∂t2
Using tan θ = slope of string =
∂ψ
:
∂x
∂ψ
∂x x+dx
−
∂ψ
∂x x
µ ∂ 2ψ
=
2
dx
T ∂t
2
µ∂ ψ
∂ ∂ψ
=
∂x ∂x
T ∂t2
∂ 2ψ
1 ∂ 2ψ
=
∂x2
T /µ ∂t2
which is
pthe wave equation, where the propagation speed of the displacement
is v = T /µ as given in Equation 1.2.
1.5.2
Separation of Variables
The general solution to the wave equation (Equation 1.1) was found earlier
using an intuitive approach. Its validity can be demonstrated by plugging it
into the wave equation:
16
CHAPTER 1. ONE-DIMENSIONAL WAVES
1 ∂ 2ψ
1 ∂
[±vf 0 (x ± vt)]
=
v 2 ∂t2
v 2 ∂t
1
= 2 v 2 f 00 (x ± vt)
v
∂2
f (x ± vt)
=
∂x2
∂ 2ψ
=
∂x2
However, it is much more difficult to apply the same approach in multiple
spatial dimensions. A more methodical technique called separation of variables is required. By assuming that the solutions to the wave equation can
be separated into a product of functions of a single, independent variable,
the equation can be separated into multiple, one-dimensional equations that
are easier to solve.
The method is best illustrated by initially applying it to the one-dimensional wave equation. The first step is to assume that the solutions can be
written as a product of functions of a single variable:
ψ(x, t) = X(x)T (t)
Inserting this function into the wave equation yields:
1
d2 T (t)
d2 X(x)
=
X(x)
dx2
v2
dt2
2
2
2
v d X(x)
1 d T (t)
=
2
X(x) dx
T (t) dt2
T (t)
Because x and t are independent variables, the above equation can only hold
true for all values of x and t if both sides are equal to the same constant.
Otherwise, changing the value of x while holding t constant, for example,
would change the left-hand side without affecting the right-hand side and
the equality would no longer be valid. This constant is referred to as the
separation constant, and can be represented by any combination of other
constants. For reasons that will become clear later, −ω 2 is chosen as the
separation constant in this case:
1.5. ONE-DIMENSIONAL WAVE EQUATION
17
v 2 d2 X(x)
1 d2 T (t)
2
=
−ω
=
X(x) dx2
T (t) dt2
The above can now be written as two separate equations, one a function of
t alone and the other a function of x alone:
d2 X(x) ω 2
d2 T (t)
+
X(x)
=
0
and
+ ω 2 T (t) = 0
dx2
v2
dt2
The two equations are identical and equivalent to the equation of motion
for a simple harmonic oscillator, which has both complex and real solutions.
The complex solutions are given by:
˜ −ikx
T (t) = ãeiωt + b̃e−iωt and X(x) = c̃eikx + de
where ã, b̃, c̃ and d˜ are complex integration constants and k = ω/v. Multiplying the solutions produces the full wave function:
˜ i(−kx−ωt)
ψ(x, t) = X(x)T (t) = b̃c̃ei(kx−ωt) + b̃de
˜ i(−kx+ωt) (1.14)
+ ãc̃ei(kx+ωt) + ãde
The final two terms are redundant and can be dropped by setting ã = 0 because their real parts are identical to those for the first two terms. Combining
the complex integration constants and writing them as complex exponentials
yields:
ψ(x, t) = A1 ei(kx−ωt+φ1 ) + A2 ei(−kx−ωt+φ2 )
These solutions are the propagating harmonic wave functions of Equation
1.10, and will be referred to as the travelling wave solutions.
The real solutions for X(x) and T (t) are given by:
T (t) = a cos ωt + b sin ωt and X(x) = c cos kx + d sin kx
where a, b, c and d are integration constants. Multiplying the solutions produces the full wave function:
ψ(x, t) = A1 cos kx cos ωt + A2 cos kx sin ωt
+ A3 sin kx cos ωt + A4 sin kx sin ωt (1.15)
18
CHAPTER 1. ONE-DIMENSIONAL WAVES
where the integration constants have been combined. These solutions are the
wave functions for harmonic standing waves, and will therefore be referred
to as the standing wave solutions. Because standing waves are produced
by interfering harmonic waves traveling in opposite directions, the standing
wave solutions are linear combinations of the traveling wave solutions and
not independent.
1.6
Fourier Transforms
It may initially seem that the solutions produced by the separation of variables method are not exhaustive. After all, there are many wave functions
that take the form of Equation 1.1 that are not harmonic. However, harmonic waves with different frequencies, amplitudes and phases can interfere
to produce other types. For the moment, consider harmonic waves traveling
in the positive x direction exclusively. According to the Superposition Principle, the wave function for a set of interfering harmonic waves spanning a
continuous and infinite range of frequencies/wavenumbers is given by:
Z
ψ(x, t) = Re
∞
F̃ (k)ei(kx−ωt) dk
0
where the integral represents a continuous sum over frequency/wavenumber
and F (k) is an amplitude density (unit of amplitude per unit wavenumber)
to account for the multiplication by dk.
Extending the lower limit on the integral to negative infinity allows the
frequencies/wavenumbers to take on negative values. The real parts of the
corresponding wave functions are identical to those for their positive counterparts (cos (kx − ωt) = cos (−kx + ωt)), so including them is redundant.
However, they play a useful role if the amplitude density for −k is required
to be the complex conjugate of that for k, F̃ (−k) = F̃ (k)∗ , because the
imaginary parts of their wave functions cancel:
1.6. FOURIER TRANSFORMS
19
F̃ (k)ei(kx−ωt) + F̃ (−k)ei(−kx+ωt)
= F̃ (k)ei(kx−ωt) + F̃ (k)∗ ei(−kx+ωt)
= F (k)eiφ ei(kx−ωt) + F (k)e−iφ ei(−kx+ωt)
= F (k)ei(kx−ωt+φ) + F (k)ei(−kx+ωt−φ)
= F (k) cos (kx − ωt + φ) + iF (k) sin (kx − ωt + φ)+
F (k) cos (−kx + ωt − φ) + iF (k) sin (−kx + ωt − φ)
= 2F (k) cos (kx − ωt + φ)
Including the negative wavenumbers with this condition on their amplitude
densities therefore simplifies the mathematics by allowing the real operator
to be dropped from the integral:
Z ∞
F̃ (k)ei(kx−ωt) dk
ψ(x, t) =
−∞
Next, assume that the harmonic waves can interfere to produce a general
traveling wave of the form f (x − vt) with initial waveform f (x). To be true,
there must be a function F̃ (k) such that:
Z ∞
F̃ (k)eikx dk
(1.16)
f (x) = ψ(x, 0) =
−∞
It can be found by applying what is commonly referred to as Fourier’s Trick.
Both sides of the equation are multiplied by a second complex exponential,
and then integrated over space:
Z
∞
f (x)e
−∞
−ik0 x
ZZ
∞
0
F̃ (k)eikx e−ik x dkdx
Z ∞−∞
Z ∞
0
=
F̃ (k)
ei(k−k )x dxdk
dx =
−∞
−∞
Integrating a complex exponential yields a delta function multiplied by 2π,
so:
Z ∞
=
F̃ (k)2πδ(k − k 0 )dk
−∞
= 2π F̃ (k 0 )
20
CHAPTER 1. ONE-DIMENSIONAL WAVES
Dropping the prime from k 0 yields:
1
F̃ (k) =
2π
∞
Z
f (x)e−ikx dx
(1.17)
−∞
which is called the Fourier transform of f (x). Its inverse, Equation 1.16, is
called the inverse Fourier transform of F̃ (k) or the Fourier integral of f (x).
Notice that if f (x) is a real function:
Z ∞
1
F̃ (−k) =
f (x)e−i(−k)x dx
2π −∞
Z ∞
1
=
f (x)eikx dx
2π −∞
Z ∞
∗
1
f (x)e−ikx dx
=
2π −∞
Z
∗
∞
1
−ikx
f (x)e
dx
=
2π −∞
= F̃ (k)∗
so the condition required to include the negative wavenumbers in the Fourier
integral is guaranteed. Inserting the time dependence into the initial waveform to get the wave function:
Z
∞
f (x − vt) =
F̃ (k)e
ik(x−vt)
Z
∞
F̃ (k)ei(kx−ωt) dk
dk =
(1.18)
−∞
−∞
For a wave that propagates in the negative x direction, the sign is simply
reversed:
Z
∞
f (x + vt) =
F̃ (k)e
i(kx+ωt)
Z
∞
dk =
−∞
F̃ (k)ei(−kx−ωt) dk
(1.19)
−∞
Consider the specific example of a Gaussian pulse. F̃ (k) is determined
by evaluating Equation 1.17:
1
F̃ (k) =
2π
Z
∞
−∞
Ae−x
2 /2σ 2
e−ikx dx
1.7. ENERGY TRANSMISSION
21
which can be found in a table of integrals:
A√
2 2
2πσ 2 e−k σ /2
2π
Aσ
2 2
= √ e−k σ /2
2π
=
If the pulse is travelling in the positive x direction, its wave function is given
by:
Z ∞
(x−vt)2
Aσ
2 2
−
2
2σ
√ e−k σ /2 ei(kx−ωt) dk
=
ψ(x, t) = Ae
2π
−∞
Notice that the Fourier transform of the Gaussian pulse F̃ (k) is also Gaussian, but its width is determined by the value of 1/σ rather than σ. The
width of the Fourier transform, also called the bandwidth of the pulse, is
therefore inversely related to the width of the pulse. The broader the pulse,
the narrower the range of interfering harmonic waves required to produce
it. The reverse is also true. This trade-off is universal regardless of pulse
shape and is responsible for a wide variety of physical phenomena, including
Heisenberg’s Uncertainty Principle in quantum mechanics.
Because any traveling wave can be viewed as a combination of interfering
harmonic waves, the separation of variables solutions are exhaustive. For
this reason, the remainder of the book will focus on the mechanics of harmonic waves. The behavior of any other wave can be determined simply by
adding the results for its constituent harmonic waves (multiplying by F̃ (k)
and integrating).
1.7
Energy Transmission
Physical quantities generally carry energy when they propagate. For a string,
it is the transfer of mechanical energy from one element to the next that
causes displacement to propagate. Calculating the energy transfer is usually
a straightforward process. Consider, for example, a harmonic wave propagating along a string in the positive x direction, where the wave function is
given by Equation 1.5. The mechanical power transferred to a representative
string element, like the one shown in Figure 1.7, by the neighboring element
to the left is given by:
22
CHAPTER 1. ONE-DIMENSIONAL WAVES
P =F ·v
where v is its velocity and F is the force exerted by the neighboring element.
Because the motion of the element is transverse:
P = Ft v
where Ft is the transverse component of the force, which in this case is the
vertical component of the tension in the string. From the figure:
P = −T sin θx
∂ψ
∂t
As noted in the derivation of the wave equation, sin θx ≈ ∂ψ/∂x:
∂ψ ∂ψ
∂x ∂t
= −T [−kA sin (kx − ωt + φ)][ωA sin (kx − ωt + φ)]
= T kωA2 sin2 (kx − ωt + φ)
= −T
substituting T = µv 2 from Equation 1.2 and k = ω/v:
P = µvω 2 A2 sin2 (kx − ωt + φ)
Because the average of sine squared over one period is equal to one half, the
average transmitted power is:
1
Pav = µvω 2 A2
2
Although this result is particular to a string, it is generally the case for any
harmonic wave that the energy transmission is a function of the propagation
speed and the squared amplitude.
1.8
Reflection and Transmission
To this point, waves that travel through a uniform medium have been considered exclusively. Finding wave functions for media whose properties vary
1.8. REFLECTION AND TRANSMISSION
23
continuously can be difficult and is beyond the purview of this book. However, cases where waves encounter boundaries between uniform media with
different properties will be addressed. When a propagating wave strikes such
a boundary, some of its energy is generally reflected and some is transmitted.
For boundaries with simple shapes, wave functions for the the reflected and
transmitted waves can be calculated by enforcing certain physical laws at
those boundaries, referred to as boundary conditions.
Figure 1.8: Reflection/transmission of a harmonic wave by a boundary at
x = 0 between strings with different mass densities.
Consider, as an example, a harmonic wave propagating on a semi-infinite
string that encounters a boundary with a second semi-infinite string possessing a different mass density as illustrated in Figure 1.8. The incident,
reflected and transmitted wave functions are:
24
CHAPTER 1. ONE-DIMENSIONAL WAVES
ψi (x, t) = Ãi ei(ki x−ωt)
ψr (x, t) = Ãr ei(−ki x−ωt)
ψt (x, t) = Ãt ei(kt x−ωt)
(1.20)
where ki = ω/vi and kt = ω/vt . The complex amplitude of the incoming wave
is arbitrary. The other two are determined by imposing boundary conditions
on the waves. The first condition enforces continuity at the boundary, meaning that the conjoined strings must stay connected. Because the boundary
is located at x = 0, this condition requires that:
ψ+ (0, t) = ψ− (0, t)
ψt (0, t) = ψi (0, t) + ψr (0, t)
Ãt = Ãi + Ãr
where the incident and reflected waves are added because they interfere to
produce a combined wave on the same string. The second condition enforces
Newton’s third law at the boundary, meaning that the forces exerted by
the strings on one another must be equal. Imposing this condition on the
transverse component of the tension requires:
T sin θ+ = T sin θ−
As noted in the derivation of the wave equation, sin θ ≈ tan θ = ∂ψ/∂x:
T
∂ψ
∂ψ
(0, t) = T
(0, t)
∂x +
∂x −
T ikt Ãt = T iki Ãi − T iki Ãr
kt Ãt = ki Ãi − ki Ãr
The two equations produced by imposing the boundary conditions can
be used to solve for the complex amplitudes of the reflected and transmitted
waves in terms of the complex amplitude of the incident wave. Substituting
the first equation into the second:
1.8. REFLECTION AND TRANSMISSION
25
kt (Ãi + Ãr ) = ki Ãi − ki Ãr
Ãi (ki − kt ) = Ãr (ki + kt )
ki − kt
Ãr
=
ki + kt
Ãi
Substituting this result back into the first equation:
ki − kt
Ãt = Ãi +
Ãi
ki + kt
ki + kt ki − kt
+
= Ãi
ki + kt ki + kt
Ãt
2ki
=
ki + kt
Ãi
The impedance for a string is defined as:
Impedance = Z =
p
µT
(1.21)
p
Using this definition, a substitution can be made for k = ω/v = ω/ T /µ =
Zω/T into the results above for Ãr and Ãt such that they can be written in
a form that is dependent upon the properties of the media alone:
Zi − Zt
Ãr
=
Zi + Zt
Ãi
2Zi
Ãt
=
T =
Zi + Zt
Ãi
R=
(1.22)
(1.23)
where R is referred to as the reflection coefficient and T the transmission
coefficient for the boundary.
Notice that for transmission into a very heavy string (µt µi ), R → −1
and T → 0. The incident wave is almost completely reflected and flipped
(corresponding to a 180-degree phase change), and the transmitted wave is
almost nonexistent. In the extreme limit as µt → ∞, the incident string is
unable to move at the boundary and is referred to as fixed. In the opposite
26
CHAPTER 1. ONE-DIMENSIONAL WAVES
direction (µt decreases), the reflection coefficient decreases and the transmission coefficient increases. When µt = µi , R = 0 and T = 1, implying that the
transmission is complete and there is no reflection. As the transmitted string
becomes lighter than the incident string, reflection and transmission both increase and the reflected wave no longer undergoes a phase change. When
the transmitted string becomes very light (µt µi ), R → 1 and T → 2.
The incident wave is almost completely reflected and the transmitted wave,
although present, carries almost no energy due to the string’s lack of mass.
In the extreme limit as µt → 0, the incident string is effectively unattached
at the boundary and therefore referred to as free.
1.9
Finite Media
The previous section examined the behavior of waves in semi-infinite media
with a single boundary. This section will address finite media with two
boundaries, each of which could be fixed, free or joined to another medium.
The wave functions for such a medium can be found by applying appropriate
boundary conditions at both ends.
1.9.1
Fixed Strings
As an initial example, consider a string fixed at both ends. In this case,
there is no wave incident upon one of the boundaries that sets the string
in motion. Rather, the string is ’plucked’ to generate an initial wave that
continuously reflects off of the boundaries and interferes with itself. For an
initial harmonic wave, the reflected waves traveling in opposite directions
interfere to produce standing waves. Consequently, boundary conditions are
applied to the standing wave solutions to the wave equation (Equation 1.15)
rather than the traveling wave solutions.
Assume that the boundaries for the string are located at x = 0 and x = L.
Because the force at a fixed boundary is effectively infinite, the boundary condition enforcing Newton’s third law is not applied. The continuity condition
requires ψ = 0 at both boundaries given that the ends of the string do not
move. Applying this condition to Equation 1.15 at x = 0:
1.9. FINITE MEDIA
27
0 = ψ(0, t) = A1 cos 0 cos ωt + A2 cos 0 sin ωt
+ A3 sin 0 cos ωt + A4 sin 0 sin ωt
= A1 cos ωt + A2 sin ωt
This can only be true for all times if A1 = A2 = 0, leaving:
ψ(x, t) = A3 sin kx cos ωt + A4 sin kx sin ωt
(1.24)
Applying the continuity condition for the second boundary at x = L:
0 = ψ(L, t) = sin kL(A3 cos ωt + A4 sin ωt)
which can only be true for all times if:
nπ
(1.25)
L
where n is an integer, meaning that the wavenumber has a discrete set of
possible values. The fixed string wave functions are therefore given by:
sin kL = 0 ⇒ kL = nπ ⇒ kn =
ψ(x, t) = sin kn x(A3 cos ωt + A4 sin ωt)
(1.26)
where each of the standing waves in the discrete set is referred to as a normal
mode.
Because the allowed wavenumbers are discrete, the corresponding wavelengths and frequencies are also discrete:
2π
2L
=
kn
n
and
2πv
πv
ωn = 2πfn =
=
n
λn
L
λn =
(1.27)
(1.28)
where the set of allowed frequencies is commonly referred to as a harmonic
series. Rearranging the top equation, L = (λn /2)n, makes it clear that for
the nth normal mode, exactly n half wavelengths span the string as illustrated
in Figure 1.9. Fundamentally, the set of normal modes is the subset of all
harmonic standing waves that possess nodes at x = 0 and x = L where the
string is required to be motionless.
CHAPTER 1. ONE-DIMENSIONAL WAVES
ψ(x)
28
n=1
n=2
n=3
n=4
x
Figure 1.9: The first four normal modes at t − 0 for a string fixed at both
ends.
Of course, multiple normal modes can exist on the same fixed string and
interfere with one another. The combined wave function is given by the sum:
ψ(x, t) =
X
sin kn x(A3n cos ωn t + A4n sin ωn t)
(1.29)
n
where the individual amplitudes, A3n and A4n , are determined by the initial
state of the string when it is set in motion. Consider, for example, a string
that is plucked such that its initial shape is given by the function f (x) and
its initial velocity by v(x). Applying the first condition:
1.9. FINITE MEDIA
29
f (x) = ψ(x, 0) =
X
sin kn x(A3n cos 0 + A4n sin 0)
n
=
X
A3n sin kn x
n
The values for A3 n can be found by applying a variant of Fourier’s trick. Each
side of the equation is multiplied by a second sine function and integrated
over the length of the string:
Z
L
f (x) sin km xdx =
X
0
Z
A3n
L
sin kn x sin km xdx
0
n
The result of the second integral is 0 unless m = n, in which case it is L/2:
Z
L
f (x) sin km xdx = A3m
0
L
2
Recasting the subscript:
A3n
2
=
L
L
Z
f (x) sin kn xdx
(1.30)
0
Applying the second condition:
X
∂ψ
(x, 0) =
ωn sin kn x(−A3n sin ωn 0 + A4n cos ωn 0)
∂t
n
X
=
A4n ωn sin kn x
v(x) =
n
Using Fourier’s trick yields:
A4n
2
=
Lωn
Z
L
v(x) sin kn xdx
(1.31)
0
Because the functions f (x) and v(x) are completely general, any wave that is
initiated on the string can be viewed as a combination of interfering harmonic
standing waves.
30
1.9.2
CHAPTER 1. ONE-DIMENSIONAL WAVES
Free Strings
Next, consider the case where one end of the string segment is fixed and
the other end is free. If the fixed end is located at x = 0, the harmonic
wave functions for the string are given by Equation 1.24 after the continuity
condition has been enforced. Because the other end is free, the continuity
condition does not apply there, but the transverse component of the force
must be zero. Applying this condition at x = L:
0=
∂ψ
(L, t) = k cos kL(A3 cos ωt + A4 sin ωt)
∂x
which can only be true for all times if:
1
1 π
cos kL = 0 ⇒ kL = n +
π ⇒ kn = n +
2
2 L
(1.32)
where n is an integer. The final fixed-free wave functions are therefore given
by Equation 1.26 where A3 and A4 are determined by the initial state of the
string.
The discretized wavelengths and frequencies for the fixed-free string are
given by:
2L
2π
=
kn
n + 1/2
and
2πv
πv
1
ωn = 2πfn =
=
n+
λn
L
2
λn =
(1.33)
(1.34)
Solving the top equation for L = (λn /2)n + λn /4 indicates that n half wavelengths plus a quarter wavelength span the string for the nth normal mode as
illustrated in Figure 1.10. The set of normal modes for the fixed-free string is
therefore the subset of harmonic standing waves that possess nodes at x = 0
and antinodes at x = L.
For a string segment that is free at both ends, the transverse component
of the force must be zero at both boundaries. Applying this condition to
Equation 1.15 at x = 0 yields:
31
ψ(x)
1.9. FINITE MEDIA
n=1
n=2
n=3
n=4
x
Figure 1.10: The first four normal modes at t = 0 for a string fixed at one
end and free at the other.
∂ψ
(0, t) = −A1 k sin 0 cos ωt − A2 k sin 0 sin ωt
∂x
+ A3 k cos 0 cos ωt + A4 k cos 0 sin ωt
= A3 k cos ωt + A4 k sin ωt
0=
A3 and A4 must therefore be equal to zero, leaving:
ψ(x, t) = cos kx(A1 cos ωt + A2 sin ωt)
Applying the same boundary condition at x = L:
0=
∂ψ
(L, t) = −k sin kL(A1 cos ωt + A2 sin ωt)
∂x
(1.35)
32
CHAPTER 1. ONE-DIMENSIONAL WAVES
which follows only if:
π
L
where n is an integer. The final wave functions are therefore:
sin kL = 0 ⇒ kL = nπ ⇒ kn = n
ψ(x, t) = cos kn x(A1 cos ωt + A2 sin ωt)
(1.36)
(1.37)
where A1 and A2 are determined by the initial state of the string segment.
Because the condition on the wavenumber is identical to that for a fixed
string, the permitted wavelengths and frequencies are the same. However, the
corresponding normal modes are shifted a quarter wavelength, as illustrated
in Figure 1.11, such that antinodes are located at x = 0 and x = L where
the string is free.
=1
=2
=3
=4
ψ(x)
n
n
n
n
x
Figure 1.11: The first four normal modes at t = 0 for a string free at both
ends.
1.9. FINITE MEDIA
1.9.3
33
Joined Strings
Finally, consider the case where the string segment is joined to semi-infinite
strings at either end, with a traveling harmonic wave incident from the negative x direction as illustrated in Figure 1.12. The incident, reflected and
transmitted wave functions are identical to those for a single boundary (see
Equation 1.20). The incident and reflected wave functions within the segment
are given by:
ψis (x, t) = Ãis ei(ks x−ωt)
ψrs (x, t) = Ãrs ei(−ks x−ωt)
Figure 1.12: Reflection/transmission of a harmonic wave by a string segment.
Applying the continuity condition at both boundaries yields:
Ãi + Ãr = Ãis + Ãrs and Ãis eiks L + Ãrs e−iks L = Ãt eikt L
34
CHAPTER 1. ONE-DIMENSIONAL WAVES
Applying Newton’s third law at both boundaries produces:
Ãi ki − Ãr ki = Ãis ks − Ãrs ks and Ãis ks eiks L − Ãrs ks e−iks L = Ãt kt eikt L
Substituting for the wavenumber in terms of the impedance (k = Zω/T ),
these become:
Ãi Zi − Ãr Zi = Ãis Zs − Ãrs Zs and Ãis Zs eiks L − Ãrs Zs e−iks L = Ãt Zt eikt L
The four boundary condition equations can be used to solve for the unknown complex amplitudes in terms of the incident amplitude. The reflection
and transmission coefficients are given by:
(1 − Zt /Zi ) cos ks L − i(Zt /Zs − Zs /Zi ) sin ks L
Ãr
=
(1 + Zt /Zi ) cos ks L − i(Zt /Zs + Zs /Zi ) sin ks L
Ãi
2Zi Zs
Ãt
T =
=
(Zs Zt + Zi Zs ) cos ks L − i(Zi Zt + Zs2 ) sin ks L
Ãi
R=
The amplitudes for the waves within the string segment are given by:
(Zi + Zs ) + (Zs − Zi )R
Ãis
=
2Zs
Ãi
(Zs − Zi ) + (Zi + Zs )R
Ãrs
=
2Zs
Ãi
Because all four equations are complex, there are typically phase differences
between the waves.
1.10
Radiation
Waves are produced by sources, such as a stone striking the surface of a
body of water, an oscillator vibrating a string, or a finger plucking a string
segment. The generation of a wave by a source is defined as radiation. The
corresponding wave function can be determined as long as the behavior of
the source is well-characterized. If it acts at a single point in time, the initial
1.10. RADIATION
35
conditions it produces in the medium can be used to calculate the wave
function as illustrated in the previous section for a fixed string. However, if
it acts continuously, a different approach is required.
One option is to treat the location of the source as a boundary for the
medium, and impose a boundary condition consistent with the behavior of
the source on the general solutions to the wave equation. For example,
consider the case of a harmonic oscillator attached to an infinite string. If
the oscillator is attached at the origin of the coordinate system, the infinite
string is effectively split into two semi-infinite strings, each with a boundary
located at x = 0. The condition on each boundary is that its motion must
match that of the source:
ψ(0, t) = Ãe−iωt
This condition is imposed on the general solutions to the wave equation,
which in this case are the traveling wave solutions:
ψ(x, t) = Ã+ ei(kx−ωt) + Ã− ei(−kx−ωt)
Sources only produce waves that propagate outward from their location, so
Ã− = 0 for the semi-infinite string on the positive side of the origin and
Ã+ = 0 for the semi-infinite string on the negative side, leaving:
ψ+ (x, t) = Ã+ ei(kx−ωt) and ψ− (x, t) = Ã− ei(−kx−ωt)
where ψ+ (x, t) and ψ− (x, t) are the wave functions for the strings on the
positive and negative sides of the origin respectively. Applying the boundary
condition to both yields:
Ãe−iωt = ψ± (0, t) = ñ e−iωt
à = ñ
Consequently, the source produces an outward propagating harmonic wave
on each side with complex amplitude Ã. The two wave functions can be
combined into a single expression using an absolute value operator:
ψ(x, t) = Ãei(k|x|−ωt)
(1.38)
36
CHAPTER 1. ONE-DIMENSIONAL WAVES
A second option is to adapt the wave equation to account for the presence
of the source and solve it. Referring back to Figure 1.7, Newton’s second law
dictated that the equation of motion for a string element was given by:
∂ 2ψ
∂t2
If there is an additional force acting on the element to produce radiation, the
equation of motion becomes:
T sin θx+dx − T sin θx = (µdx)
∂ 2ψ
∂t2
where F (x, t) is the force per unit length (force density) applied to the element. Following the same steps used to derive the wave equation, this
becomes:
T sin θx+dx − T sin θx + F (x, t)dx = (µdx)
∂ 2ψ
1 ∂ 2ψ
−F (x, t)
−
=
(1.39)
2
2
2
∂x
v ∂t
T
Specifically for the case of a harmonic oscillator attached to the string at the
origin:
1 ∂ 2ψ
−F̃
∂ 2ψ
− 2 2 =
δ(x)e−iωt
(1.40)
2
∂x
v ∂t
T
where F̃ is the complex amplitude of the force applied by the oscillator
and the delta function specifies that it is located at the origin. From here,
various techniques can be used to solve the equation, but Equation 1.38 can
be verified as the solution.
Non-harmonic sources are more complicated, but can be handled by taking advantage of the Principle of Superposition. Just as any waveform can
be written as a sum of harmonic waveforms as in Equation 1.16, the time
dependence of any source f (t) can be represented as a sum of the time dependencies for harmonic sources:
Z
∞
f (t) =
F̃ (ω)e−iωt dω
(1.41)
−∞
where F̃ (ω) is the Fourier transform of f (t):
Z ∞
1
F̃ (ω) =
f (t)eiωt dt
2π −∞
(1.42)
1.11. VECTOR WAVES AND POLARIZATION
37
A non-harmonic source can therefore be treated as a combination of harmonic
sources whose complex amplitudes are determined by its Fourier transform.
The Principle of Superposition then dictates that the wave function produced
by the combination is the sum/integral of the wave functions generated by
the individual harmonic constituents. For a string driven by a non-harmonic
source located at the origin, for example, the wave function produced would
be given by:
Z ∞
F̃ (ω)ei(k|x|−ωt) dω
(1.43)
ψ(x, t) =
−∞
1.11
Vector Waves and Polarization
This final section of the chapter addresses the behavior of one-dimensional
vector waves, which have been ignored until now to simplify the introduction
of new concepts. Beginning with the wave equation, the version for a vector
quantity is identical to that for a scalar quantity:
1 ∂ 2ψ
∂ 2ψ
=
∂x2
v 2 ∂t2
Writing ψ in terms of its rectangular components yields:
∂2
(ψx x̂ + ψy ŷ + ψz ẑ) =
∂x2
∂ 2 ψy
∂ 2 ψz
∂ 2 ψx
x̂
+
ŷ
+
ẑ =
∂x2
∂x2
∂x2
(1.44)
1 ∂2
(ψx x̂ + ψy ŷ + ψz ẑ)
v 2 ∂t2
1 ∂ 2 ψx
1 ∂ 2 ψy
1 ∂ 2 ψz
x̂
+
ŷ
+
ẑ
v 2 ∂t2
v 2 ∂t2
v 2 ∂t2
which can be broken up into three separate equations, one for each unit
vector:
∂ 2 ψn
1 ∂ 2 ψn
=
n = x, y, z
∂x2
v 2 ∂t2
Each of these is a scalar wave equation that is independent of the other
two, meaning that the methods of the previous sections can be employed to
find the wave functions for each of the components independently, and then
recombined to form a vector afterward.
Vector waves can possess all three components, but it is not a requirement.
A transverse wave, for example, is a wave for which the propagating vector
38
CHAPTER 1. ONE-DIMENSIONAL WAVES
quantity is perpendicular to the propagation direction. Such waves can have z
and/or y components, but no x component. A displacement wave on a string
is a perfect example. A longitudinal wave, on the other hand, is a wave for
which the propagating vector is parallel to the propagation direction. These
waves only possess an x component. A common example is a displacement
wave on a coiled spring, where the individual coils move move forward and
backward along the length of the spring creating regions of compression and
rarefaction as illustrated in Figure 1.13.
Figure 1.13: A snapshot of a longitudinal wave propagating along coiled
spring.
To this point in the chapter, string displacement has been restricted to
a single plane, making it a scalar quantity. Without that constraint, the
displacement becomes a vector quantity with both z and y components. For
harmonic waves traveling in the positive x direction, the independent wave
1.11. VECTOR WAVES AND POLARIZATION
39
functions for the two components are given by:
ψy = Ay ei(kx−ωt+φy ) and ψz = Az ei(kx−ωt+φz )
How the two components sum to produce a vector wave for different combinations of amplitude and phase is referred to as the wave’s polarization.
The simplest possible case is when the phases are equal. The combined
wave function becomes:
ψ(x, t) = (Ay ŷ + Az ẑ)ei(kx−ωt+φ)
Consider the motion of the string at the specific location x = 0. Taking the
real part of the equation above leaves:
ψ(x, t) = (Ay ŷ + Az ẑ) cos (ωt − φ)
This is simply a vector at angle tan−1p
(Az /Ay ) with respect to the y-axis
whose length oscillates between A = A2y + A2z and −A. The motion is
therefore identical to that of a string constrained to a plane, but tilted at an
angle. Because the movement occurs along a single line, it is referred to as
linear polarization.
The motion becomes more complicated if the phases are not equal. If
they differ by ninety degrees but the amplitudes are equal, the combined
wave function becomes:
ψ(x, t) = Aei(kx−ωt+φ) ŷ + Aei(kx−ωt+φ±π/2) ẑ
Taking the real part at x = 0 leaves:
ψ(x, t) = A cos (ωt − φ)ŷ + A cos (ωt − φ ∓ π/2)ẑ
ψ(x, t) = A cos (ωt − φ)ŷ ± A sin (ωt − φ)ẑ
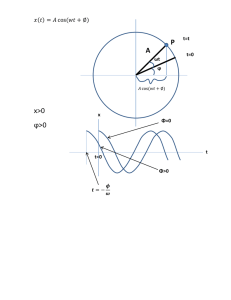
This vector has a constant length A and traces out a circle in the yz plane
with angular velocity ±ω as illustrated in Figure 1.14. For this reason, the
motion is referred to as circular polarization. As x increases, the string
motion continues to be circular but is increasingly out of phase with the
motion at x = 0. Consequently, the movement of the entire string looks like
a rotating corkscrew.
If the phases differ by ninety degrees but the amplitudes are unequal, the
shape traced by the vector goes from being a circle to an ellipse whose major
40
CHAPTER 1. ONE-DIMENSIONAL WAVES
Figure 1.14: The motion of a string at x = 0 for a circularly polarized wave.
and minor axes are determined by the values of Ax and Ay . This type of
motion is therefore referred to as elliptical polarization. If the phases differ
by an angle other than ninety degrees, the ellipse is tilted.
Chapter 2
Three-dimensional Wave
Functions
The initial step in extending the concepts introduced in the first chapter to
three dimensions is to find the harmonic solutions to the three-dimensional
wave equation by applying the separation of variables technique. The bulk of
this chapter is devoted to deriving those solutions in the rectangular, spherical and cylindrical coordinate systems. The remainder focuses on energy
transmission by acoustic waves as the primary example of three-dimensional
scalar waves, and electromagnetic waves as the primary example of a threedimensional vector waves.
2.1
Three-dimensional Wave Equations
The three-dimensional wave equation is an intuitive extension of the onedimensional equation. The scalar form in rectangular coordinates is given
by:
∇2 ψ(x, y, z, t) =
1 ∂ 2ψ
∂ 2ψ ∂ 2ψ ∂ 2ψ
+
+
=
∂x2
∂y 2
∂z 2
v 2 ∂t2
(2.1)
where ∇2 is referred to as the Laplacian operator and is the divergence of
the gradient operator:
∇2 = ∇ · ∇ =
∂2
∂2
∂2
+
+
∂x2 ∂y 2 ∂z 2
41
42
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
where:
∇=
∂
∂
∂
x̂ +
ŷ + ẑ
∂x
∂y
∂z
For an acoustic wave, ψ represents the pressure in a material medium. If the
compressibility of the medium is κ, defined as the inverse of the bulk modulus
B, and the mass density is ρ, then:
r
v=
1
=
κρ
s
B
ρ
(2.2)
The three-dimensional vector wave equation is identical:
∇2 ψ =
1 ∂ 2ψ
v 2 ∂t2
(2.3)
For an electromagnetic wave:
1
v=√
µ
(2.4)
where is the permittivity and µ the permeability of the medium through
which the wave propagates. The electric (E) and magnetic (B) field vectors
that comprise the wave separately satisfy the wave equation. However, the
wave equations for the fields are less restrictive than Maxwell’s equations
from which they are derived:
∇ · E = 0 Gauss’s Law (sourceless)
∇·B =0
∂B
Faraday’s Law
∇×E =−
∂t
∂E
∇ × B = µ
Ampere’s Law (sourceless)
∂t
(2.5)
(2.6)
(2.7)
(2.8)
The solutions must therefore meet additional criteria to be valid. In particular, Equations 2.5 and 2.6 specify that both fields must be divergenceless,
while Equations 2.7 and 2.8 indicate that they are not independent, i.e. the
solution to one of the fields determines the solution to the other.
2.1. THREE-DIMENSIONAL WAVE EQUATIONS
43
Imposing these additional conditions can be difficult, so in some instances
it is easier to introduce and solve for potentials from which the vector quantities can be obtained. Because the magnetic field is divergenceless, it can be
written as the curl of another vector field which is referred to as the vector
potential :
B =∇×A
(2.9)
Plugging the vector potential into Faraday’s law yields:
∂
∇ × E = − (∇ × A)
∂t ∂A
=0
∇× E+
∂t
Because the curl of the term in parentheses is zero, it can be written as the
gradient of a scalar field, which is named the scalar potential :
∂A
∂t
∂A
E = −∇V −
∂t
−∇V = E +
(2.10)
Plugging Equations 2.10 and 2.9 into Gauss’s and Faraday’s laws:
∇ · E = −∇2 V −
∂
(∇ · A) = 0
∂t
and
∇ × B = ∇ × ∇ × A = −µ∇
∂V
∂ 2A
− µ 2
∂t
∂t
or using the vector identity ∇ × ∇ × A = ∇(∇ · A) − ∇2 A:
∂V
∂ 2A
−∇2 A + ∇(∇ · A) = −µ∇
− µ 2
∂t
∂t
2
∂V
∂
A
∇2 A − µ 2 − ∇ ∇ · A + µ
=0
∂t
∂t
44
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
Solving these two equations for the potentials and plugging the results into
Equations 2.10 and 2.9 produces the same results for E and B as solving
Maxwell’s equations directly. They are not simple equations in their current
form, but because the electric and magnetic fields are calculated by taking
derivatives of the potentials, there is some freedom in setting the values of
V and A without effecting the results for E and B. This freedom is referred
to as gauge freedom, and picking a particular form for V and A is referred
to as setting the gauge.
The Lorentz Gauge sets V and A such that:
∂V
(2.11)
∂t
Plugging this additional condition into the two equations above yields:
∇ · A = −µ
∂ 2V
∂ 2A
2
and
∇
A
=
µ
(2.12)
∂t2
∂t2
which are clearly wave equations. Consequently, finding appropriate wave
functions for the scalar and vector potentials and plugging the results into
Equations 2.10 and 2.9 is an equivalent alternative to solving the wave equation for the electric and magnetic fields directly and imposing any additional
conditions required by Maxwell’s equations.
∇2 V = µ
2.2
Separable Solutions
Solutions to the three-dimensional wave equation can be found by employing
the separation of variables technique introduced in the first chapter. The first
step is to separate the time dependence of the solutions from their spatial
dependence. Beginning with scalar wave functions and assuming that they
can be written as a product of time and space dependent functions:
ψ(r, t) = ψ(r)T (t)
Plugging this expression into the wave equation:
T (t)∇2 ψ(r) =
Dividing through by ψ(r, t):
d2 T (t)
1
ψ(r)
v2
dt2
2.2. SEPARABLE SOLUTIONS
45
v2
1 d2 T (t)
∇2 ψ(r) =
ψ(r)
T (t) dt2
Choosing −ω 2 as the separation constant:
d2 T (t)
ω2
2
2
+ ω T (t) = 0 and ∇ ψ(r) + 2 ψ(r) = 0
dt2
v
The solutions to the first equation, which were introduced in the first chapter,
are:
T (t) = a cos ωt + b sin ωt Standing Wave Solutions
or
T (t) = ãeiωt + b̃e−iωt
Traveling Wave Solutions
As in one dimension, ã is generally set to zero to avoid redundant terms in
the traveling wave functions. Substituting k = ω/v, the spatial equation
becomes:
∇2 ψ(r) + k 2 ψ(r) = 0
(2.13)
which is called the Helmholtz equation.
2.2.1
Rectangular Wave Functions
The next step in the process is to assume ψ(r) can be written as a product of functions of a single spatial variable, which vary depending upon the
coordinate system being used. Beginning with the rectangular coordinate
system:
ψ(r) = X(x)Y (y)Z(z)
Plugging this expression into the Helmholtz equation yields:
YZ
d2 Y
d2 Z
d2 X
+
XZ
+
XY
+ k 2 XY Z = 0
dx2
dy 2
dz 2
Dividing through by ψ(r):
46
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
1 d2 X
1 d2 Y
1 d2 Z
+
+
= −k 2
X dx2
Y dy 2
Z dz 2
Because each of the terms is dependent upon a single spatial variable, the
equation can only hold true for all values of x, y and z if each term is
a constant. Choosing −kn2 as the separation constant for the nth spatial
variable:
d2 X
+ kx2 X = 0
2
dx
d2 Y
+ ky2 Y = 0
2
dy
d2 Z
+ kz2 Z = 0
2
dz
where:
kx2 + ky2 + kz2 = k 2
(2.14)
The solutions are given by:
X(x) = c cos kx x + d sin kx x
Y (y) = f cos ky y + g sin ky y
Z(z) = h cos kz z + l sin kz z
or
˜ −ikx x
X(x) = c̃eikx x + de
Y (y) = f˜eiky y + g̃e−iky y
Z(z) = h̃eikz z + ˜le−ikz z
Standing Wave Solutions
Traveling Wave Solutions
where, as in one dimension, the standing wave solutions are linear combinations of the traveling wave solutions and therefore not independent.
Consider the traveling wave solutions for a simple case where kx = ky = 0.
The wave function becomes:
ψ(r, t) = XY ZT = Ãei(±kx x−ωt)
which, as in one dimension, represents a harmonic wave propagating along
the x axis with wavenumber kx = k = ω/v. In this particular case, the wave
function does not vary in the y or z directions. Consequently, for any plane
perpendicular to the x axis, ψ oscillates in unison at all points on the plane.
Such a surface is called a wavefront, and this type of wave is referred to as a
plane wave because its wavefronts are planar.
2.2. SEPARABLE SOLUTIONS
47
For the more general case:
ψ(r, t) = Ãei(±kx x±ky y±kz z−ωt)
which can be simplified by introducing what is referred to as the wavevector :
k = ±kx x̂ ± ky ŷ ± kz ẑ
(2.15)
where
q
ω
|k| = kx2 + ky2 + kz2 = k =
(2.16)
v
from Equation 2.14. Inserting the wavevector into the wave function yields:
ψ(r, t) = Ãei(k·r−ωt) = Ãei(krk −ωt)
(2.17)
where rk is the projection of r onto k, or the length/component of r along
the wavevector direction (see Figure 2.1). This wave function therefore represents a harmonic wave propagating in the direction of increasing values of rk
along the wavevector. Given that all points on a plane perpendicular to the
wavevector have the same value of rk and therefore oscillate in unison, the
wavefronts for these waves are also planar and perpendicular to the direction
of propagation.
As in one dimension, any possible three-dimensional wave function can be
written as a sum of harmonic plane wave functions using a three-dimensional
Fourier transform. Any three-dimensional wave can therefore be viewed as a
combination of interfering harmonic plane waves.
Also as in one dimension, the vector wave equation can be split into three
independent scalar wave equations, one for each vector component. When
solved using the separation of variables technique in rectangular coordinates,
the resulting harmonic plane waves can have different wavevectors for each
component. However, most physical vector waves must satisfy additional
conditions that require them to be identical. Under that assumption, the
traveling wave solutions are given by:
ψ(r, t) = Ãx ei(k·r−ωt) x̂ + Ãy ei(k·r−ωt) ŷ + Ãz ei(k·r−ωt) ẑ = Ãei(k·r−ωt) (2.18)
If there are no restrictions on the amplitudes or phases of the components of
Ã, the waves can be longitudinal, transverse (with linear, circular or elliptical
polarization), or a combination of the two.
48
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
Figure 2.1: Visualization of a plane wave propagating in the direction of the
wavevector.
For electromagnetic fields, additional conditions are placed on the solutions by Maxwell’s equations. Applying Gauss’ law to the electric field:
0 = ∇ · E = ∇ · Ãei(k·r−ωt)
= iÃx kx ei(k·r−ωt) + iÃy ky ei(k·r−ωt) + iÃz kz ei(k·r−ωt)
= Ãx kx + Ãy ky + Ãz kz
= Ã · k
This result implies that the electric field must be perpendicular to the direction of propagation, meaning that the wave must be transverse. Because the
magnetic field is also divergenceless, it must also be a transverse wave.
2.2. SEPARABLE SOLUTIONS
49
For all harmonic waves, where the time dependence is given by e−iωt ,
Faraday’s law and Ampere’s law become:
∇ × E = iωB and ∇ × B = −i
ω
v2
(2.19)
Applying Faraday’s law:
i
i
B = − ∇ × E = − ∇ × Ãei(k·r−ωt)
ω
ω
i
= − [(iky Ez − ikz Ey )x̂ + (ikz Ex − ikx Ez )ŷ + (ikx Ey − iky Ex )ẑ]
ω
i
= − (ik × E)
ω
k
= k̂ × E
ω
1
= k̂ × E
(2.20)
v
This result requires the electric and magnetic fields to be perpendicular to
one another, and their amplitudes to differ by a multiplicative constant equal
to the propagation speed (see Figure 2.2). Applying Ampere’s law yields the
same result.
2.2.2
Spherical Wave Functions
Unlike in one dimension, there are alternative coordinate systems in three
dimensions that also possess separable solutions to the wave equation. One
example is the spherical coordinate system, which is illustrated in Figure 2.3
along with the transformations to/from the rectangular coordinate system.
These transformations, along with the chain rule, can be applied to rewrite
the Laplacian operator in terms of spherical coordinates:
1 ∂
∂
1 ∂2
1 ∂
2 ∂
r
+
sin θ
+
∇ = 2
r ∂r
∂r
sin θ ∂θ
∂θ
sin2 θ ∂φ2
2
Inserting this result into the scalar wave equation produces:
1 ∂
1 ∂
∂ψ
1 ∂ 2ψ
1 ∂ 2ψ
2 ∂ψ
r
+
sin
θ
+
=
r2 ∂r
∂r
sin θ ∂θ
∂θ
v 2 ∂t2
sin2 θ ∂φ2
(2.21)
50
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
Figure 2.2: Illustration of the relationship between the electric and magnetic
fields for an electromagnetic plane wave.
which can be solved using separation of variables.
The first step is to separate the time dependence, which yields the Helmholtz equation written in terms of spherical coordinates:
1 ∂
1 ∂
∂ψ(r)
1 ∂ 2 ψ(r)
2 ∂ψ(r)
r
+
sin θ
+
+ k 2 ψ(r) = 0
r2 ∂r
∂r
sin θ ∂θ
∂θ
sin2 θ ∂φ2
The next step is to assume a separable solution of the form:
ψ(r) = R(r)Θ(θ)Φ(φ)
Plugging this expression into the Helmholtz equation and dividing by ψ produces:
2.2. SEPARABLE SOLUTIONS
51
Figure 2.3: The spherical coordinate system, consisting of a radial coordinate
r, a zenith angle θ, and an azimuthal angle φ. The corresponding unit vectors
are also shown.
1
d
dΘ
1
d2 Φ
1 1 d
2 dR
r
+
sin θ
+
+ k2 = 0
r2 R dr
dr
Θ sin θ dθ
dθ
Φ sin2 θ dφ2
Multiplying through by r2 sin2 θ and isolating the φ-dependent term:
1 d
sin θ
R dr
2
1
d
dΘ
1 d2 Φ
2 dR
2 2
r
+
sin θ
+k r =−
dr
Θ sin θ dθ
dθ
Φ dφ2
Choosing m2 as the separation constant:
52
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
d2 Φ
+ m2 Φ = 0
dφ2
and
1
d
dΘ
1 d
2 dR
2 2
2
r
+
sin θ
+ k r = m2
sin θ
R dr
dr
Θ sin θ dθ
dθ
(2.22)
Dividing by sin2 θ and isolating the r- and φ-dependent terms:
1 d
m2
d
dΘ
1
2 dR
2 2
r
+k r =
sin θ
−
R dr
dr
dθ
sin2 θ Θ sin θ dθ
Choosing l(l + 1) as the separation constant:
1 d
sin θ dθ
m2
+ l(l + 1) −
Θ=0
sin2 θ
and
1 d
dR
r2
+ k 2 r2 = l(l + 1)
R dr
dr
dΘ
sin θ
dθ
(2.23)
The second equation can be simplified:
d
2 dR
r
+ [k 2 r2 − l(l + 1)]R = 0
dr
dr
d2 R
dR
2r
+ r2 2 + [k 2 r2 − l(l + 1)]R = 0
dr
dr
d2 R 2 dR
l(l + 1)
2
+
+ k −
R=0
dr2
r dr
r2
The solutions to Equation 2.22 are typical:
Φ(φ) = c cos mφ + d sin mφ Standing Wave Solutions
or
˜ −imφ Traveling Wave Solutions
Φ(φ) = c̃eimφ + de
(2.24)
2.2. SEPARABLE SOLUTIONS
53
However, m must be an integer for Φ to be a single-valued function, i.e. Φ
must have the same value at φ and φ + 2π. The solutions to Equation 2.23
are a series of special functions called Associated Legendre Polynomials:
|m|
Θ(θ) = Pl (cos θ)
where l must be an integer for Θ not to explode at 0 and π, and |m| must be
less than or equal to l for Θ to be non-zero. The first few are given in Table
2.1 and plotted in Figure 2.4.
P00 (cos θ) = 1
P10 (cos θ) = cos θ
√
P11 (cos θ) = 1 − cos2 θ = sin θ
P20 (cos θ) = 3 cos2 θ − 1
√
P21 (cos θ) = cos θ 1 − cos2 θ = cos θ sin θ
P22 (cos θ) = 1 − cos2 θ = sin2 θ
P30 (cos θ) = 5 cos3 θ − 3 cos θ
√
P31 (cos θ) = (5 cos2 θ − 1) 1 − cos2 θ = (5 cos2 θ − 1) sin θ
P32 (cos θ) = cos θ(1 − cos2 θ) = cos θ sin2 θ
P33 (cos θ) = (1 − cos2 θ)3/2 = sin3 θ
Table 2.1: Associated Legendre Polynomials to l = 3.
When multiplied together, the solutions for Φ and Θ provide the full angular
dependence of the separable wave functions and are referred to as Spherical
Harmonics:
|m|
Ylm = CΘ(θ)Φ(φ) = CPl (cos θ)e±imφ
where C is a constant that normalizes the integral of |Ylm |2 over all angles.
The first few are listed in Table 2.2.
Finally, Equation 2.24 has both standing wave and traveling wave solutions. The standing wave solutions are a combination of special functions
called spherical Bessel functions:
54
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
P1m(cos θ)
1
0
−1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
P2m(cos θ)
2
1
0
−1
−1
P3m(cos θ)
2
0
−2
−1
cos θ
Figure 2.4: Associated Legendre Polynomials from l = 1 to 3. Solid lines are
for m = 0, dashed lines for m = 1, dotted lines for m = 2, and dashed-dotted
lines for m = 3.
R(r) = f jl (kr) + gnl (kr) Standing Wave Solutions
where the jl are spherical Bessel functions of the first kind, and the nl are
spherical Bessel functions of the second kind or spherical Neumann functions.
Both are combinations of decaying sinusoids. The first few are provided in
Table 2.3 and plotted in Figure 2.5. Notice that the spherical Neumann
functions explode at the origin and are therefore not viable solutions at that
location. The traveling wave solutions are a combination of spherical Hankel
functions:
2.2. SEPARABLE SOLUTIONS
55
r
1
4π
r
3
cos θ
Y10 =
4π
r
3
Y1±1 = ∓
sin θe±iφ
8π
r
5
0
Y2 =
(3 cos2 θ − 1)
16π
r
15
cos θ sin θe±iφ
Y2±1 = ∓
8π
r
15
Y2±2 =
sin2 θe±2iφ
32π
r
7
0
Y3 =
(5 cos3 θ − 3 cos θ)
16π
r
21
±1
Y3 = ∓
(5 cos2 θ − 1) sin θe±iφ
64π
r
105
cos θ sin2 θe±2iφ
Y3±2 =
32π
r
35
Y3±3 = ∓
sin3 θe±3iφ
64π
Y00
=
Table 2.2: Spherical Harmonics to l = 3.
(1)
(2)
R(r) = f˜hl (kr) + g̃hl (kr) Traveling Wave Solutions
where
(1)
(2)
hl (kr) = jl (kr) + inl (kr) and hl (kr) = jl (kr) − inl (kr)
(1)
(2)
and the hl are spherical Hankel functions of the first kind and the hl are
spherical Hankel functions of the second kind. Because the spherical Bessel
functions are combinations of sinusoids, the spherical Hankel functions are
combinations of complex exponentials. For example:
56
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
sin kr
kr
cos kr
n0 (kr) = −
kr
sin kr cos kr
j1 (kr) =
−
(kr)2
kr
cos kr sin kr
n1 (kr) = −
−
(kr)2
kr
cos kr
3
sin kr
−3
j2 (kr) =
−1
2
(kr)
kr
(kr)2
3
cos kr
sin kr
−1
−3
n2 (kr) = −
2
(kr)
kr
(kr)2
15
6 sin kr
15
cos kr
j3 (kr) =
−
−
−
1
(kr)3 kr
kr
(kr)2
kr
15
6 cos kr
15
sin kr
n3 (kr) = −
−
−
−1
3
2
(kr)
kr
kr
(kr)
kr
j0 (kr) =
Table 2.3: Spherical Bessel functions to l = 3.
sin kr
cos kr
eikr
−i
= −i
kr
kr
kr
−ikr
sin kr
cos kr
e
(2)
h0 =
+i
=i
kr
kr
kr
The full solutions to the wave equation are given by the product of the
terms above along with the solutions to the time-dependent equation:
(1)
h0 =
ψ(r, θ, φ, t) = R(r)Θ(θ)Φ(φ)T (t)
Like the rectangular solutions, the spherical solutions can be combined by
integrating over k and summing over l and m to produce any legitimate
three-dimensional wave function.
Consider the traveling wave solutions for l = m = 0:
±ikr e
˜ e−iωt = Ã ei(±kr−ωt)
(1)(c̃ + d)
ψ(r, t) = ∓
kr
r
2.2. SEPARABLE SOLUTIONS
57
1.5
l
l
l
l
jl (kr)
1
0.5
=0
=1
=2
=3
0
−0.5
0
5
0
5
10
15
10
15
0.5
nl (kr)
0
−0.5
−1
−1.5
kr
Figure 2.5: Spherical Bessel functions to l = 3.
where all of the multiplicative constants have been absorbed into Ã. This
function represents a harmonic wave traveling in the direction of increasing/
decreasing values of r, i.e. propagating away from/towards the origin. Because all points on a spherical shell surrounding the origin have the same
value of r and therefore oscillate in unison, the wavefronts are spherical.
Consequently, waves of this type are referred to as spherical waves. As for
plane waves, the wavefronts are perpendicular to the direction of propagation
(see Figure 2.6). Unlike plane waves, the amplitude decreases with distance
from the origin by a factor of r.
If the standing wave solutions are used for Φ, the wave functions for l > 0
take the form:
(1)
(2)
|m|
ψ(r, t) = [f˜hl (kr) + g̃hl (kr)]Pl (cos θ)(c cos mφ + d sin mφ) e−iωt
58
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
Figure 2.6: Visualization of a spherical wave propagating away from the
origin.
Because the spherical Hankel functions are combinations of complex exponentials, these wave functions all contain terms of the form ei(±kr−ωt) and are
therefore spherical waves. At large distances from the origin (kr 1 ⇒ r λ), the higher order 1/(kr) terms in the spherical Hankel functions drop out
such that:
(−i)l+1 ikr
il+1 −ikr
(2)
≈
e
hl ≈
e
(2.25)
kr
kr
Absorbing the angular dependence and complex constants into a single term,
the wave functions become:
(1)
hl
ψ(r, t) =
Ã(θ, φ) i(±kr−ωt)
e
r
(2.26)
2.2. SEPARABLE SOLUTIONS
59
where the only difference from the case where l = 0 is that the amplitude
possesses angular dependence.
Because the rectangular components of a vector wave independently solve
the wave equation, the separable solution in spherical coordinates for each is
the same as for a scalar. Assuming that the wavenumbers are identical, the
traveling wave solutions take the form of Equation 2.26 at large distances
from the origin with different amplitudes for each component. Pulling the
common terms leaves an expression for a simple spherical wave:
1
ψ(r, t) = [A˜x (θ, φ)x̂ + Ãy (θ, φ)ŷ + Ãz (θ, φ)ẑ] ei(±kr−ωt)
r
Ã(θ, φ) i(±kr−ωt)
=
e
r
(2.27)
For electromagnetic waves, Maxwell’s equations require the electric and
magnetic fields to be divergenceless. Rigorously enforcing this additional
condition on the general spherical solutions is complicated and beyond the
level of this book. However, applying Guass’ law in spherical coordinates to
Equation 2.27 specifically:
"
#
1 ∂
Ã
(θ,
φ)
r
r2
ei(±kr−ωt)
0=∇·E = 2
r ∂r
r
"
#
"
#
1 ∂
Ãθ (θ, φ) i(±kr−ωt)
1 ∂ Ãφ (θ, φ) i(±kr−ωt)
+
sin θ
e
+
e
r sin θ ∂θ
r
r sin θ ∂φ
r
The last two terms are proportional to r−2 and can be dropped for large
values of r. Differentiating the first term produces:
Ãr (θ, φ) ±ikr
e
± ikre±ikr
2
r
Dropping the first term, which is proportional to r−2 , yields:
0 = e−iωt
Ãr (θ, φ) i(±kr−ωt)
e
r
This equation holds only if Ãr = 0, i.e. the electric field has no radial component. The electric field must therefore be perpendicular to the direction of
0 = ±ik
60
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
propagation. Because the magnetic field is also divergenceless, it must also be
perpendicular to the propagation direction. Consequently, electromagnetic
spherical waves must be transverse like plane waves.
The electric and magnetic fields can be related by applying Equation 2.19.
Using the product rule ∇ × (ba) = ∇b × a + b∇ × a:
−i
∇×E
ω
±ikr
e
−i −iωt
e±ikr
∇
=
e
× Ã(θ, φ) +
∇ × Ã(θ, φ)
ω
r
r
B=
The curl is proportional to r−1 , which means that the term on the right is
proportional to r−2 and can be dropped. Calculating the gradient on the left
yields:
−i −iωt ∂ e±ikr
e
r̂ × Ã(θ, φ)
B=
ω
∂r
r
−i −iωt
e±ikr e±ikr
=
e
− 2
±ik
r̂ × Ã(θ, φ)
ω
r
r
Dropping the second term, which is proportional to r−2 leaves:
ei(±kr−ωt)
k
B = ± r̂ × Ã(θ, φ)
ω
r
k
= ± r̂ × E
ω
1
= k̂ × E
v
which is identical to the relationship between the electric and magnetic fields
for plane waves, and requires them to be perpendicular to one another.
2.2.3
Cylindrical Wave Functions
The cylindrical coordinate system is the other primary example of an alternative three-dimensional coordinate system. Figure 2.7 displays the coordinates
2.2. SEPARABLE SOLUTIONS
61
Figure 2.7: The cylindrical coordinate system, consisting of a radial coordinate r, an azimuthal angle φ, and an elevation z. The corresponding unit
vectors are also shown.
along with transformations to/from the rectangular system. These transformations, along with the chain rule, can be applied to rewrite the Laplacian
operator in terms of cylindrical coordinates:
∇2 =
1 ∂
1 ∂2
∂2
∂2
+
+
+
∂r2 r ∂r r2 ∂φ2 ∂z 2
Inserting this result into the scalar wave equation yields:
∂ 2 ψ 1 ∂ψ
1 ∂ 2ψ
1 ∂ 2ψ ∂ 2ψ
+
+
=
+
∂r2
r ∂r
r2 ∂φ2
∂z 2
v 2 ∂t2
which can be solved using separation of variables.
(2.28)
62
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
Separating the time dependence first yields the Helmholtz equation in
terms of cylindrical coordinates:
1 ∂ 2 ψ(r) ∂ 2 ψ(r)
∂ 2 ψ(r) 1 ∂ψ(r)
+
+
+
+ k 2 ψ(r) = 0
∂r2
r ∂r
r2 ∂φ2
∂z 2
Inserting a separable solution of the form:
ψ(r) = R(r)Φ(φ)Z(z)
dividing by ψ, and isolating the z-dependent term produces:
1 dR
1 d2 Φ
1 d2 Z
1 d2 R
2
+
+
+
k
=
−
R dr2
rR dr
r2 Φ dφ2
Z dz 2
Choosing kz2 as the separation constant:
d2 Z
+ kz2 Z = 0
dz 2
and
2
1 dR
1 d2 Φ
1dR
+
+
+ k 2 − kz2 = 0
R dr2
rR dr
r2 Φ dφ2
(2.29)
The bottom equation can be simplified by introducing a wavevector:
k = kr r̂ + kz ẑ
where
p
ω
|k| = kr2 + kz2 = k =
v
such that kr2 = k 2 − kz2 and:
1 dR
1 d2 Φ
1 d2 R
+
+
+ kr2 = 0
R dr2
rR dr
r2 Φ dφ2
Multiplying through by r2 and isolating the φ-dependent term:
r2 d2 R
r dR
1 d2 Φ
2 2
+
+
r
k
=
−
r
R dr2
R dr
Φ dφ2
Choosing the separation constant m2 yields:
(2.30)
(2.31)
2.2. SEPARABLE SOLUTIONS
d2 Φ
+ m2 Φ = 0
dφ2
and
2
d R 1 dR
m2
2
+ kr − 2 R = 0
+
dr2
r dr
r
63
(2.32)
(2.33)
The solutions to Equation 2.29 are identical to those for the rectangular
z coordinate:
Z(z) = h cos kz z + l sin kz z Standing Wave Solutions
or
Z(z) = h̃eikz z + ˜le−ikz z Traveling Wave Solutions
The solutions to Equation 2.32 are identical to those for the spherical φ
coordinate:
Φ(φ) = c cos mφ + d sin mφ Standing Wave Solutions
or
˜ −imφ Traveling Wave Solutions
Φ(φ) = c̃eimφ + de
where m must be an integer.
Equation 2.33 is comparable to Equation 2.24 and has similar solutions.
The standing wave solutions are called Bessel functions:
R(r) = f Jm (kr r) + gNm (kr r) Standing Wave Solutions
where the Jm are Bessel functions of the first kind and the Nm are Bessel
functions of the second kind or Neumann functions. Both are expressed as
an infinite series of polynomials. The first few of each type are plotted in
Figure 2.8. Notice that the functions look like decaying sinusoids, and at
large distaces from the origin (kr r 1 ⇒ r λ):
r
2
1 π cos kr r − m +
Jm (kr r) ≈
πkr r
2
2
r
2
1
π
Nm (kr r) ≈
sin kr r − m +
πkr r
2
2
(2.34)
64
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
Like their spherical counterparts, the Neumann functions explode at the
origin and are not viable solutions at that location. The traveling wave
solutions are a combination of Hankel functions:
1.5
m
m
m
m
J m(kr r)
1
0.5
=0
=1
=2
=3
0
−0.5
0
5
10
15
5
10
15
Nm (kr r)
0.5
0
−0.5
−1
−1.5
0
kr r
Figure 2.8: Bessel functions to m = 3.
(1)
(2)
R(r) = f˜Hm
(kr r) + g̃Hm
(kr r) Traveling Wave Solutions
where
(1)
(2)
Hm
(kr r) = Jm (kr r) + iNm (kr r) and Hm
(kr r) = Jm (kr r) − iNm (kr r)
(1)
(2)
and the Hm are Hankel functions of the first kind and the Hm are Hankel functions of the second kind. Substituting Equation 2.34 for the Bessel
functions in their definitions indicates that they are decaying complex exponentials at large distances from the origin:
2.3. ENERGY TRANSMISSION
65
r
2 i[kr r−(m+ 12 )( π2 )]
e
πkr r
r
2 −i[kr r−(m+ 12 )( π2 )]
(2)
Hm (kr r) ≈
e
πkr r
(1)
Hm
(kr r)
≈
(2.35)
The full solutions to the wave equation are given by the product of the
terms above along with the solutions to the time-dependent equation:
ψ(r, φ, z, t) = R(r)Φ(φ)Z(z)T (t)
Like the rectangular and spherical solutions, the cylindrical solutions can
be combined by integrating over k and summing over m to produce any
legitimate three-dimensional wave function. As for the spherical solutions,
the separable solution in cylindrical coordinates for each of the rectangular
components of a vector wave is the same as for a scalar.
2.3
Energy Transmission
In three dimensions, the energy transmitted by a wave is spread over a surface
perpendicular to the direction of propagation. Consequently, the fundamental measure of energy transmission is instantaneous intensity, or the power
transmitted per unit area. It is a vector quantity that points in the direction
of energy flow/propagation and is represented by S. Average intensity, or
simply intensity, is the time-averaged power transmitted per unit area. It
is represented by I and is calculated for harmonic waves by averaging the
instantaneous intensity over one period:
Z
1 T
Sdt
(2.36)
I=
T 0
Just as the equation derived for power transmission in the first chapter was
particular to a string, the calculation of instantaneous intensity is specific to
the type of wave being considered.
2.3.1
Acoustic (Scalar) Intensity
Acoustic waves are propagating pressure variations within a fluid caused by
the displacement of particles that comprise the fluid. When the particles
66
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
move, they collide with neighboring particles causing them to move, which
allows the motion to propagate through the fluid longitudinally like on a
coiled spring. In locations where the particle density is high (a compression)
the pressure is higher than normal, whereas in locations where the particle
density is low (a rarefaction) the pressure is lower than normal (see Figure
2.9). The relationship between particle displacement, velocity and pressure
is given by Euler’s equation, which is an expression of Newton’s second law
for materials:
∂u
∂ 2ψ
= −∇p
(2.37)
=ρ
2
∂t
∂t
where ρ is fluid density, ψ is particle displacement, u is particle velocity and
p is the pressure.
ρ
Figure 2.9: Illustration of particle motion and the resulting density/pressure
variations for a harmonic acoustic wave.
2.3. ENERGY TRANSMISSION
67
Just as the mechanical power transferred by an object can be calculated
by taking the dot product between its velocity and the force it applies, the
instantaneous intensity for an acoustic wave at a given location is given by
the product of particle velocity and pressure at that location:
S = pu
(2.38)
where the energy propagation and particle velocity directions are identical
because the wave is longitudinal. Euler’s equation can be used to substitute
a simple expression for the particle velocity in terms of the pressure:
Z
1
∇pdt
u=−
ρ
For harmonic plane waves in particular:
Z
h
i
1
u=−
∇ Ãei(k·r−ωt) dt
ρ
Z
h
i
1
ik Ãei(k·r−ωt) dt
=−
ρ
1 k h i(k·r−ωt) i
=
Ãe
ρω
i
1 h
= k̂ Ãei(k·r−ωt)
ρv
p
= k̂
ρv
Plugging this result into the equation for instantaneous intensity yields:
S=
p2
k̂
ρv
(2.39)
Note that when physical quantities are multiplied/squared, as pressure is
above, they must be real. Otherwise, the imaginary parts of complex representations become real when multiplied and contribute to the real part of
the product. Consequently:
S=
1 i(k·r−ωt+φ) Re Ae
ρv
2
k̂ =
A2
cos2 (k · r − ωt + φ)k̂
ρv
(2.40)
68
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
and the intensity is given by:
1
I=
T
Z
T
0
A2
A2
cos2 (k · r − ωt + φ)k̂dt =
k̂
ρv
2ρv
(2.41)
which is very similar to the expression for the average power transmitted by
a harmonic wave on a string (see Section 1.7). The modulus of a complex
number is defined as:
p
√
√
|Ã| = ÃÃ∗ = Aeiφ Ae−iφ = A2 = A
(2.42)
which is equal to its phasor magnitude, just as the modulus of a vector:
q
|A| = A2x + A2y + A2z = A
is equal to its magnitude. Consequently, the intensity can also be written in
terms of the complex amplitude as:
I=
|Ã|2
k̂
2ρv
(2.43)
For harmonic spherical waves at large distances from the origin:
"
#
Z
1
Ã(θ, φ) i(±kr−ωt)
u=−
∇
e
dt
ρ
r
Applying the gradient operator in terms of spherical coordinates yields:
"
#
"
#
∂ Ã(θ, φ) i(±kr−ωt)
Ã(θ, φ) i(±kr−ωt)
∇
e
= r̂
e
r
∂r
r
"
#
"
#
1 ∂ Ã(θ, φ) i(±kr−ωt)
1 ∂ Ã(θ, φ) i(±kr−ωt)
e
+ φ̂
e
+ θ̂
r ∂θ
r
r sin θ ∂φ
r
#
"
Ã(θ, φ) i(±kr−ωt)
Ã(θ, φ) i(±kr−ωt)
= r̂ −
e
± ik
e
r2
r
+ θ̂
1 ∂ Ã(θ, φ) i(±kr−ωt)
1 ∂ Ã(θ, φ) i(±kr−ωt)
e
+
φ̂
e
r2 ∂θ
r2 sin θ ∂φ
2.3. ENERGY TRANSMISSION
69
The terms of order r−2 can be dropped at large distances from the origin
leaving:
u=
1 ±k Ã(θ, φ) i(±kr−ωt)
p
e
r̂ = ± r̂
ρ ω
r
ρv
The instantaneous intensity is therefore given by:
S=±
A2 (θ, φ)
p2
r̂ = ±
cos2 (±kr − ωt + φ)r̂
ρv
ρvr2
(2.44)
|Ã(θ, φ)|2
A2 (θ, φ)
r̂
=
±
r̂
2ρvr2
2ρvr2
(2.45)
and the intensity by:
I=±
Notice that the intensity is almost identical to that for plane waves, but drops
off as 1/r2 . Physically, this is a consequence of energy conservation. The
total radiated power for a spherical wave can be calculated by integrating its
intensity over the surface of a spherical shell at any distance from the origin
r. Energy conservation requires the result to be the same regardless of the
value of r, but this follows only if the intensity drops off (1/r2 ) at the same
rate that the surface area of the spherical shell increases (r2 ).
2.3.2
Electromagnetic (Vector) Intensity
The instantaneous intensity for electromagnetic waves is given by the Poynting Vector :
S=
1
E×B
µ
(2.46)
For harmonic plane and spherical waves, B = (1/v)k̂ × E such that:
S=
1
1
E × (k̂ × E)
µ
v
Because the waves are transverse, the cross products yield a simple result:
S=
1
|E|2 k̂
µv
The electric field for a plane wave is given by:
(2.47)
70
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
E = Ãei(±k·r−ωt)
Without loss of generality, the z-axis can be chosen to point along the direction of propagation such that:
E = Ax ei(kz−ωt+φx ) x̂ + Ay ei(kz−ωt+φy ) ŷ
Using the real part to calculate E because multiplication is required, the
Poynting Vector becomes:
S=
1 2
[A cos2 (kz − ωt + φx ) + A2y cos2 (kz − ωt + φy )]ẑ
µv x
(2.48)
The intensity is therefore given by:
I=
|A|2
1
(A2x + A2y )ẑ =
k̂
2µv
2µv
(2.49)
Making use of the definition of the modulus of a complex vector:
p
à · Ã∗
q
= Ax eiφx Ax e−iφx + Ay eiφy Ay e−iφy + Az eiφz Az e−iφz
q
= A2x + A2y + A2z = |A|
|Ã| =
(2.50)
it can also be written in terms of the complex vector amplitude:
I=
|Ã|2
k̂
2µv
The electric field for a spherical wave is given by:
Ã(θ, φ) i(±kr−ωt)
e
r
Aθ i(±kr−ωt+φθ )
Aφ i(±kr−ωt+φφ )
=
e
θ̂ +
e
φ̂
r
r
E=
Inserting the real part into the expression for the Poynting Vector:
(2.51)
2.3. ENERGY TRANSMISSION
71
A2φ
1 A2θ
2
2
S=±
cos (±kr − ωt + φθ ) + 2 cos (±kr − ωt + φφ ) r̂ (2.52)
µv r2
r
The intensity is therefore:
I=±
|A(θ, φ)|2
|Ã(θ, φ)|2
1
2
2
(A
+
A
)r̂
=
±
r̂
=
±
r̂
φ
2µvr2 θ
2µvr2
2µvr2
(2.53)
Notice that the expressions for the intensities of both the plane and spherical
waves are almost identical to their acoustic counterparts.
72
CHAPTER 2. THREE-DIMENSIONAL WAVE FUNCTIONS
Chapter 3
Interference
Chapter 1 considered the interference between identical, traveling harmonic
waves with different phase angles or opposite propagation directions. The
former gave rise to constructive, destructive and incomplete interference, and
the latter to standing waves. This behavior naturally extends to three dimensions. If two identical plane waves propagate in the same direction, they
interfere to produce another plane wave whose amplitude is determined by
their phase difference. If they propagate in opposite directions, they interfere to produce standing waves with nodal and anti-nodal planar surfaces
perpendicular to the propagation direction. Likewise, if two identical spherical waves propagate in the same direction (toward or away from the origin),
they interfere to produce another spherical wave whose amplitude is determined by their phase difference. If they propagate in opposite directions,
they interfere to produce standing waves with nodal and anti-nodal spherical
surfaces.
However, there are additional types of interference in multiple dimensions
that are not possible in one dimension. This chapter addresses two of the
most significant: the interference between two identical plane waves traveling in different directions, and between identical outgoing spherical waves
centered at different locations.
3.1
Plane Waves
If two identical plane waves are traveling in different directions, a coordinate
system can be introduced such that their wave vectors lie in the xy-plane
73
74
CHAPTER 3. INTERFERENCE
and are bisected by the x-axis as illustrated in Figure 3.1. If the origin of the
coordinate system is placed appropriately, the phase angles can be matched
such that the wave functions are given by:
Figure 3.1: Wave vectors for two interfering plane waves, where the coordinate system is oriented such that the vectors lie in the xy-plane and are
bisected by the x-axis.
ψ1 = Ãei(kx x+ky y−ωt)
ψ2 = Ãei(kx x−ky y−ωt)
The combined wave function is therefore:
3.2. SPHERICAL WAVES
75
ψ = ψ1 + ψ2
= Ã(eiky y + e−iky y )ei(kx x−ωt)
= 2Ã cos (ky y)ei(kx x−ωt)
(3.1)
which is the product of the wave functions for a plane wave traveling along
the x-axis (the direction that bisects the wave vectors) and a standing wave
along the y-axis (the orthogonal direction). The combined wave propagates
along the x-axis like a plane wave, but its amplitude varies sinusoidally in the
y direction like a standing wave. For two vector plane waves with identical
polarizations, the result is the same but with a vector amplitude:
ψ = 2Ã cos (ky y)ei(kx x−ωt)
3.2
Spherical Waves
Consider two identical, outgoing spherical waves whose centers are separated
by a distance d as illustrated in Figure 3.2. Using the geometry from the
figure, the wave functions for for the shifted spherical waves are given by:
Ã(θ1 , φ) i(k|r−r1 |−ωt)
e
|r − r1 |
Ã(θ2 , φ) i(k|r−r2 |−ωt)
e
ψ2 =
|r − r2 |
ψ1 =
The sum can not be simplified with the wave functions in their current form.
However, at large distances from the wave centers where r d and r λ, the far-field approximation can be applied. This approximation asserts
that the amplitude terms of the wave functions are insensitive to the precise
locations of the wave centers at large distances, and can be approximated by
the amplitude for a wave centered on the origin:
Ã(θn , φ)
Ã(θ, φ)
≈
(3.2)
|r − rn |
r
The complex exponentials are more sensitive, but their distances can be
approximated by:
76
CHAPTER 3. INTERFERENCE
Figure 3.2: Geometry for two interfering spherical waves (solid lines) and the
far-field approximation (dashed lines).
|r − rn | ≈ r − r̂ · rn
(3.3)
as illustrated in Figure 3.2 where |r − r1 | and r − r̂ · r1 are approximately
equal. The conversion in Figure 2.3 can be used to write r̂ in terms of
spherical coordinates:
r̂ = sin θ cos φx̂ + sin θ sin φŷ + cos θẑ
such that:
|r − r1 | ≈ r − r̂ · r1 = r − r̂ · (d/2)ẑ = r − (d/2) cos θ
|r − r2 | ≈ r − r̂ · r2 = r − r̂ · (−d/2)ẑ = r + (d/2) cos θ
(3.4)
3.2. SPHERICAL WAVES
77
Substituting these values along with the amplitude approximation yields:
ψ = ψ1 + ψ2
≈
Ã(θ, φ) i[kr−k(d/2) cos θ−ωt] Ã(θ, φ) i[kr+k(d/2) cos θ−ωt]
e
+
e
r
r
which is the wave function for two interfering spherical waves centered on
the origin with different phase angles. Consequently, the combined wave:
Ã(θ, φ) i(kr−ωt)
ψ ≈ e−ik(d/2) cos θ + eik(d/2) cos θ
e
r
≈ e−ik(d/2) cos θ 1 + eikd cos θ ψsph
is also a spherical wave centered on the origin ψsph whose amplitude is determined by the phase difference (kd cos θ) between the waves stemming from
the difference in their propagation distances. The remaining sum can be evaluated using phasors as illustrated in Figure 3.3. Making use of the trigonometric identity cos x = 2 cos2 (x/2) − 1, the magnitude and angle of the
resultant are given by:
q
p
A(θ) = [1 + cos (kd cos θ)]2 + sin2 (kd cos θ) = 2 + 2 cos (kd cos θ)
p
= 2 + 2[2 cos2 (k(d/2) cos θ) − 1] = 2 cos [k(d/2) cos θ]
φ = k(d/2) cos θ
Inserting this result yields:
ψ ≈ e−iφ [A(θ)eiφ ]ψsph
≈ A(θ)ψsph = 2 cos [k(d/2) cos θ]ψsph
If, as usual, the intensity of the spherical wave is proportional to its squared
amplitude, then:
I ≈ A2 (θ)Isph = 4 cos2 [k(d/2) cos θ]Isph
(3.5)
where Isph is the intensity for ψsph . A2 (θ) is referred to as the interference
pattern and is plotted as a function of angle in Figure 3.4 for λ/d = 1/2. For
78
CHAPTER 3. INTERFERENCE
Figure 3.3: Phasor addition for two interfering spherical waves. Note that
φ = α/2 because the phasors form an isosceles triangle.
vector waves, the derivation is identical so ψsph can simply be replaced by its
vector equivalent.
The interference between the spherical waves is constructive when they
are in phase such that their phasors in Figure 3.3 align. This occurs at angles
for which the phase difference between the waves is an integer multiple of 2π:
kd cos θ = 2πn
λ
cos θ = n
d
(3.6)
A(θ) is at its maximum value of 2 at these angles, indicating that the amplitude of the combined wave is twice the amplitude of the individual waves.
3.2. SPHERICAL WAVES
79
4
3
2
z
1
0
−1
−2
−3
−4
−4
4
−2
2
0
0
2
−2
4
−4
y
x
Figure 3.4: The interference pattern as a function of angle (θ and φ) for two
spherical waves where λ/d = 1/2.
The corresponding maximum value of the interference pattern is 4, and a
cone with this length appears in Figure 3.4 at each of the angles.
The interference is destructive when the waves are completely out of phase
such that their phasors anti-align. This occurs at angles for which the phase
difference between the waves is an odd multiple of π:
kd cos θ = π + 2πn
1 λ
cos θ = n +
2 d
(3.7)
Given that A(θ) and the amplitude of the combined wave are equal to zero,
a nodal cone appears in Figure 3.4 at each of these angles. Notice that
80
CHAPTER 3. INTERFERENCE
Equations 3.6 and 3.7 indicate the spacing between maxima/nodal cones
increases with wavelength and decreases with distance between wave centers
d.
3.3
Application: Linear Arrays
A linear array is a line of evenly spaced wave sources or receivers. When
an array is used to generate waves, the individual sources usually produce
spherical waves. Consider an array of N such sources separated by a distance
d (see Figure 3.5). The wave function for the array is given by:
ψ=
N
X
ψn =
N
X
Ã(θn , φ)
n=1
n=1
|r − rn |
ei(k|r−rn |−ωt)
Applying the far-field approximation where r−r̂·rn = r+[n−(N +1)/2]d cos θ
as illustrated in the figure for n = 2:
ψ≈
N
X
Ã(θ, φ)
r
n=1
ei[kr+k(n−
N +1
)d cos θ−ωt]
2
which is equivalent to the wave function for N interfering spherical waves
centered on the origin with different phase angles. The combined wave:
"
ψ≈
N
X
#
e
i[k(n− N2+1 )d cos θ]
n=1
"
≈ e
−ik( N 2−1 )d cos θ
N
X
Ã(θ, φ) i(kr−ωt)
e
r
#
eikd cos θ(n−1) ψsph
n=1
is therefore also a spherical wave centered on the origin ψsph whose amplitude
is determined by the phase difference (kd cos θ) between the waves. The
remaining sum can be determined using phasors as illustrated in Figure 3.6,
however, it can also be evaluated directly as a geometric series:
N
X
n=1
e
ikd cos θ(n−1)
=
N
X
n=1
x
n−1
xN − 1
eiN kd cos θ − 1
=
= ikd cos θ
x−1
e
−1
which can be separated into a magnitude and angle for the resultant phasor:
3.3. APPLICATION: LINEAR ARRAYS
81
Figure 3.5: Geometry for a linear array with N sources. The case for an
odd value of N is shown, but the expression for the far-field approximation
is the same for an even value as long as the origin is located between the two
middle sources.
eiN kd cos θ − 1
eikd cos θ − 1
eiN (k/2)d cos θ − e−iN (k/2)d cos θ eiN (k/2)d cos θ
= i(k/2)d cos θ
e
− e−i(k/2)d cos θ ei(k/2)d cos θ
sin [N (k/2)d cos θ] ik( N −1 )d cos θ
2
=
e
sin [(k/2)d cos θ]
sin [N (k/2)d cos θ] ik( N −1 )d cos θ
2
=N
e
N sin [(k/2)d cos θ]
A(θ)eiφ =
Substituting this result into the array wave function yields:
82
CHAPTER 3. INTERFERENCE
Figure 3.6: Phasor addition for a linear array.
ψ ≈ e−iφ A(θ)eiφ ψsph
sin [N (k/2)d cos θ]
ψsph
≈ A(θ)ψsph = N
N sin [(k/2)d cos θ]
If the intensity is proportional to the squared amplitude:
2
I = A (θ)Isph = N
2
sin [N (k/2)d cos θ]
N sin [(k/2)d cos θ]
2
Isph
(3.8)
A representative interference pattern is plotted in Figure 3.7 for λ/d = 1/2
and N = 4. For vector wave sources, ψsph can simply be replaced by its
vector equivalent.
3.3. APPLICATION: LINEAR ARRAYS
83
The interference is constructive when the waves are in phase such that all
of the phasors in Figure 3.6 align. This occurs at angles for which the phase
difference between the waves is an integer multiple of 2π:
kd cos θ = 2πn
λ
cos θ = n
d
(3.9)
At these angles, A(θ) is at its maximum value of N , indicating that the
amplitude of the combined wave is N times the amplitude of the individual
waves, and the interference pattern is at its corresponding maximum value
of N 2 . A cone with this length (N 2 = 16) appears in Figure 3.7 at each of
the angles, where Equation 3.9 dictates that the spacing between them is
determined by wavelength and source separation d.
The interference is destructive at angles for which the tip of the last phasor
in Figure 3.6 meets the tail of the first such that A(θ) and the amplitude of
the combined wave are equal to zero. For this to be the case, the sum of the
phase differences between the waves (N α = N kd cos θ) must be equal to an
integer multiple of 2π:
N (kd cos θ) = 2πm
m
kd cos θ = 2π
N
mλ
cos θ =
Nd
(3.10)
where m is an integer. Notice, however, that if m is an integer multiple of N ,
the phase difference between the waves becomes an integer multiple of 2π:
m
nN
= 2π
= 2πn
N
N
meaning that the phasors align, the interference is constructive, and Equation
3.10 becomes identical to Equation 3.9. Figure 3.8 illustrates for m = 0...4
when N = 4. The interference is destructive for m = 1...3, but constructive when m = 0 or 4. Broadly speaking, there are always 3 angles where
the interference is destructive between angles where the interference is constructive. These angles appear in the right pane of Figure 3.7 where the
kdcosθ = 2π
84
CHAPTER 3. INTERFERENCE
Figure 3.7: The interference pattern for a linear array where λ/d = 1/2 and
N = 4. The two-dimensional plot on the right is included to make the nodes
between maxima visible.
interference pattern is equal to zero between angles where it is equal to its
maximum (N 2 = 16). More generally, m runs from 1 to N − 1 between n = 0
and n = 1, from N + 1 to 2N − 1 between n = 1 and n = 2, and so on such
that there are N − 1 nodes between maxima in the interference pattern.
The maximum corresponding to n = 0 at θ = 90 degrees is present for
all arrays and is called the main lobe. The others are referred to as side
lobes, and the number present is determined by the ratio λ/d in Equation
3.9. If it is greater than one, for example, then there is no solution for θ
at any value of n other than zero and there are no side lobes. In practice,
arrays are generally used to determine the direction of objects that reflect
the waves that they generate. Consequently, the absence of side lobes is
3.3. APPLICATION: LINEAR ARRAYS
85
Figure 3.8: Phasor addition showing constructive and destructive interference
for a linear array with 4 elements.
desirable because any sizable reflections are known to have been produced
by objects located somewhere along the direction of the main lobe. The main
lobe can be scanned to search in multiple directions either by adjusting the
phase angles of the sources to make the interference constructive along angles
other than 90 degrees, or by physically rotating the array.
The narrower the main lobe, the better the array can localize the direction
of a reflector. Its size is defined as the angular separation between the nearest
nodes on either side, which correspond to m = ±1. In the right pane of
Figure 3.7, half of a main lobe is visible at 90 degrees with the m = 1 node
immediately to the left marking its edge. The angular separation between
the nodes can be calculated by differentiating Equation 3.10:
86
CHAPTER 3. INTERFERENCE
dm
Nd
=−
sin θ
dθ
λ
λ 1
∆θ =
∆m
N d sin θ
Plugging in ∆m = 1 − (−1) = 2 and θ = 90 degrees yields:
2λ
(3.11)
Nd
which indicates that the size of the main lobe is determined both by the ratio
λ/d and N , which is a measure of the size of the array. The larger the array,
the narrower the main lobe.
∆θmain lobe =
Chapter 4
Reflection and Transmission
In one dimension, the boundary between media where reflection and transmission occurs is a point. In three dimensions, it is a surface. These surfaces
can have an infinite variety of shapes. Complex surfaces will be addressed
in subsequent chapters, but this one focuses on the simplest case of a planar boundary. It begins by considering the reflection and transmission of
plane waves at normal incidence to the boundary, then proceeds to oblique
incidence. Finally, the reflection and transmission of other types of traveling
waves is briefly discussed.
As in one dimension, boundary conditions must be applied at interfaces
between media to find wave functions for reflected and transmitted waves.
Because these conditions vary depending on wave type, this chapter will address acoustic and electromagnetic reflection/transmission as representative
scalar and vector examples respectively. For acoustic waves, the pressure
must be equal across the boundary to satisfy Newton’s third law. In addition, the normal component of particle velocity must be equal to maintain the
integrity of the boundary. These conditions are expressed mathematically as:
⊥
u⊥
1 = u2
p1 = p2
(4.1)
The boundary conditions for electromagnetic waves are found by enforcing
Maxwell’s equations and are very similar:
1 E1⊥ = 2 E2⊥
B1⊥ = B2⊥
k
k
E1 = E2
1 k
1 k
B1 = B2
µ1
µ2
87
(4.2)
88
4.1
4.1.1
CHAPTER 4. REFLECTION AND TRANSMISSION
Plane Waves at Normal Incidence
Acoustic Waves
Consider an acoustic plane wave incident upon a flat boundary between media as illustrated in Figure 4.1.
Figure 4.1: Geometry for determining reflection and transmission coefficients
for an acoustic plane wave normally incident on a flat boundary between
media.
The incident, reflected and transmitted wave functions are given by:
pi = Ãi ei(k1 x−ωt)
pr = Ãr ei(−k1 x−ωt)
pt = Ãt ei(k2 x−ωt)
where the complex amplitudes of the reflected and transmitted waves are
determined by applying boundary conditions. The first one requires (see
Equation 4.1):
4.1. PLANE WAVES AT NORMAL INCIDENCE
89
pi (0, t) + pr (0, t) = pt (0, t)
Ãi + Ãr = Ãt
Applying the second boundary condition:
uix (0, t) + urx (0, t) = utx (0, t)
For a plane wave (see Subsection 2.3.1):
u=
p
k̂
ρv
Making this substitution:
Ãi
Ãr
Ãt
x̂ +
(−x̂) =
x̂
ρ1 v1
ρ1 v1
ρ2 v2
Ãr
Ãt
Ãi
−
=
ρ1 v1 ρ1 v1
ρ2 v2
The specific acoustic impedance for a wave is defined as the ratio of its pressure to particle speed. For a plane wave, it is given by:
Specific Acoustic Impedance = Z =
p
= ρv
u
(4.3)
Plugging it in yields:
Ãi Ãr
Ãt
−
=
Z1 Z1
Z2
Multiplying this equation by Z2 and subtracting the equation for the first
boundary condition:
Z2
Z2
− 1 Ãi −
+ 1 Ãr = 0
Z1
Z1
(Z2 − Z1 )Ãi = (Z2 + Z1 )Ãr
The reflection coefficient is therefore given by:
90
CHAPTER 4. REFLECTION AND TRANSMISSION
R=
Ãr
Z2 − Z1
=
Z2 + Z1
Ãi
(4.4)
and the transmission coefficient by:
T =
Ãt
Ãi + Ãr
2Z2
=
=1+R=
Z2 + Z1
Ãi
Ãi
(4.5)
Notice that for transmission from a high impedance medium, such as
water, into a low impedance medium, such as air, R → −1 and T → 0. The
incident wave is almost completely reflected with a 180-degree phase change,
while the transmitted wave is nearly absent. Because the pressure at the
boundary is nearly zero (pi + pr → Ãi + Ãr = Ãi − Ãi = 0), it is referred to
as a pressure release boundary. As Z1 decreases/Z2 increases, the reflection
coefficient approaches zero and the transmission coefficient increases. When
the two are equal, R = 0 and T = 1 indicating complete transmission.
Beyond this point, both coefficients increase and the reflection coefficient
becomes positive, indicating that the reflected wave no longer undergoes a
phase change. As Z2 becomes much larger than Z1 , R → 1 and T → 2.
The incident wave is almost completely reflected and the transmitted wave,
although present, carries very little energy due to the large impedance of the
medium (see Equation 2.43). Because the normal component of the fluid
velocity at the boundary is nearly zero (uix + urx → Ãi /ρ1 v1 − Ãr /ρ1 v1 =
Ãi /ρ1 v1 − Ãi /ρ1 v1 = 0), it is referred to as a rigid boundary.
4.1.2
Electromagnetic Waves
Figure 4.2 shows an electromagnetic plane wave normally incident upon a
planar boundary. In general, the electric and magnetic field vectors can have
components both parallel and perpendicular to the plane of incidence (the
plane that contains both the incident wavevector and the y-axis, i.e. the plane
of the page). Consider initially the parallel electric field component (Ey )
and the corresponding perpendicular magnetic field component (Bz ) given
by Equation 2.20, which are the ones shown in the figure. The incident,
reflected and transmitted wave functions for these components are:
4.1. PLANE WAVES AT NORMAL INCIDENCE
91
Figure 4.2: Geometry for determining reflection and transmission coefficients
for an electromagnetic plane wave normally incident on a flat boundary between media.
Eiy = Ãi ei(k1 x−ωt)
Ery = Ãr ei(−k1 x−ωt)
Ety = Ãt ei(k2 x−ωt)
Ãr
Ãt i(k2 x−ωt)
Ãi i(k1 x−ωt)
e
Brz = − ei(−k1 x−ωt) Btz =
e
v1
v1
v2
Because there are no components of the fields perpendicular to the boundary,
the corresponding boundary conditions in Equation 4.2 can be ignored. For
the parallel component of the electric field:
Biz =
Eiy (0, t) + Ery (0, t) = Ety (0, t)
Ãi + Ãr = Ãt
92
CHAPTER 4. REFLECTION AND TRANSMISSION
For the parallel component of the magnetic field:
1
1
1
Biz (0, t) + Brz (0, t) = Btz (0, t)
µ1
µ1
µ2
Ãi
Ãr
Ãt
−
=
µ1 v1 µ1 v1
µ2 v2
With the substitution of µ for ρ, the two equations above are identical to
those obtained by applying acoustic boundary conditions. Consequently:
R=
µ2 v2 − µ1 v1
Ãr
=
µ2 v 2 + µ1 v 1
Ãi
(4.6)
and:
Ãt
2µ2 v2
=1+R=
(4.7)
µ2 v2 + µ1 v1
Ãi
The process can be repeated for the other two field components (Ez and By ),
but the results are identical.
Note that v = 0 for conductors because they can not support propagating
electromagnetic waves. Consequently, R = −1 and T = 0 for an electromagnetic wave incident upon a conducting surface. Conducting boundaries are
therefore the electromagnetic equivalent of acoustic pressure release boundaries.
T =
4.2
4.2.1
Plane Waves at Oblique Incidence
Acoustic Waves
Figure 4.3 shows an acoustic plane wave incident upon a planar boundary
at oblique incidence. The incident, reflected and transmitted wave functions
are given by:
pi = Ãi ei(k1 cos θi x+k1 sin θi y−ωt)
pr = Ãr ei(krx x+kry y+krz z−ωt)
pt = Ãt ei(ktx x+kty y+ktz z−ωt)
Applying the first boundary condition:
4.2. PLANE WAVES AT OBLIQUE INCIDENCE
93
Figure 4.3: Geometry for determining reflection and transmission coefficients
for an acoustic plane wave obliquely incident on a flat boundary between
media.
pi (0, y, z, t) + pr (0, y, z, t) = pt (0, y, z, t)
Ãi ei(k1 sin θi y−ωt) + Ãr ei(kry y+krz z−ωt) = Ãt ei(kty y+ktz z−ωt)
For this equation to be valid at all values of y and z, the exponents must be
equal. This requires the y and z components of the wavevectors be be equal.
For the z components:
ktz = krz = kiz = 0
which implies that all three wavevectors must lie in the same plane. If θr and
θt are the angles of the reflected and transmitted wavevectors with respect
94
CHAPTER 4. REFLECTION AND TRANSMISSION
to the x-axis, then the remaining components of the vectors can be written
as:
krx = −k1 cos θr kry = k1 sin θr
ktx = k2 cos θt kty = k2 sin θt
Making this substitution for the y-components of the wavevectors:
k1 sin θi = k1 sin θr = k2 sin θt
which requires:
θi = θr
Law of Reflection
and
sin θt
sin θi
=
Snell’s Law
v1
v2
(4.8)
(4.9)
Snell’s law is also referred to as the law of refraction, and implies that the
transmitted wavevector is bent toward/away from the x-axis relative to the
incident wavevector when the wave passes into a slower/faster medium. With
the y and z components of the wavevectors equal, the boundary condition
equation becomes:
Ãi + Ãr = Ãt
Applying the second boundary condition:
uix (0, y, z, t) + urx (0, y, z, t) = utx (0, y, z, t)
pi (0, y, z, t)
pr (0, y, z, t)
pt (0, y, z, t)
cos θi −
cos θr =
cos θt
Z1
Z1
Z2
Ãi i(k1 sin θi y−ωt)
Ãr i(k1 sin θr y−ωt)
Ãt i(k2 sin θt y−ωt)
e
cos θi −
e
cos θr =
e
cos θt
Z1
Z1
Z2
The law of reflection and Snell’s law guarantee that the exponents are identical, so:
Ãi
Ãr
Ãt
cos θi −
cos θr =
cos θt
Z1
Z1
Z2
4.2. PLANE WAVES AT OBLIQUE INCIDENCE
95
Substituting the first boundary condition equation into the second:
Ãi
Ãr
Ãi + Ãr
cos θi −
cos θr =
cos θt
Z1
Z1
Z2
Ãi (Z2 cos θi − Z1 cos θt ) = Ãr (Z1 cos θt + Z2 cos θr )
Using the law of reflection to substitute θi for θr yields the reflection coefficient:
R=
Z2 cos θi − Z1 cos θt
Ãr
=
Z2 cos θi + Z1 cos θt
Ãi
(4.10)
where cos θt can be obtained from Snell’s law:
s
cos θt =
p
2
1 − sin θt =
v22
1 − 2 sin2 θi
v1
(4.11)
The corresponding transmission coefficient is given by:
T =
Ãt
2Z2 cos θi
=1+R=
Z2 cos θi + Z1 cos θt
Ãi
(4.12)
Both coefficients vary with the angle of the incident wave. Often, there
is an angle at which the reflection coefficient is zero and the transmission
coefficient is one. Because the wave is completely transmitted at this angle,
it is referred to as the angle of intromission. The reflection coefficient also
changes sign at this angle, indicating the phase of the reflected wave flips 180
degrees. The angle can be found by setting the reflection coefficient equal to
zero and solving for the incident angle:
96
CHAPTER 4. REFLECTION AND TRANSMISSION
Z2 cos θi − Z1 cos θt
Z2 cos θi + Z1 cos θt
0 = ρ2 v2 cos θi − ρ1 v1 cos θt
s
v2
ρ2 v2 cos θi = ρ1 v1 1 − 22 sin2 θi
v1
0=
ρ22 v22 cos2 θi = ρ21 v12 − ρ21 v22 (1 − cos2 θi )
(ρ22 v22 − ρ21 v22 ) cos2 θi = ρ21 v12 − ρ21 v22
s
v12 /v22 − 1
cos θi =
ρ22 /ρ21 − 1
(4.13)
For the angle to be real, the speed and density ratios must either both be
greater than one or less than one. If they are greater than one, the speed ratio
must be smaller than the density ratio. If they are less than one, the speed
ratio must be larger than the density ratio. Consequently, not all boundaries
possess an angle of intromission.
If the propagation speed in the incident medium is less than the propagation speed in the transmitted medium (v1 < v2 ), there is an incident angle
for which the transmitted angle is 90 degrees. It is referred to as the critical
angle (θc ), and can be found using Snell’s law:
sin (π/2)
sin θc
=
v1
v2
v1
sin θc =
v2
(4.14)
At this angle, the reflection coefficient is given by:
R=
Z2 cos θi − Z1 cos(π/2)
=1
Z2 cos θi + Z1 cos(π/2)
indicating complete reflection. Beyond the critical angle, Snell’s law yields no
real solution for the transmitted angle (sin θt > 1), implying that the incident
wave continues to be completely reflected. For this reason, any wave with
an angle of incidence greater than or equal to the critical angle is said to
undergo total internal reflection.
4.2. PLANE WAVES AT OBLIQUE INCIDENCE
4.2.2
97
Electromagnetic Waves
Figure 4.4 shows the electric field component parallel to the plane of incidence and the corresponding perpendicular magnetic field component for an
electromagnetic wave obliquely incident upon a planar boundary. Because
boundary conditions must be enforced at x = 0 for all values of y and z, the
required conditions on the acoustic wavevectors (the y and z components
must be identical) also apply to the electromagnetic wave vectors. Consequently, the law of reflection and Snell’s law are valid and can be used in
applying the boundary conditions of Equation 4.2. The first produces:
Figure 4.4: Geometry for determining reflection and transmission coefficients
for an electromagnetic plane wave obliquely incident on a flat boundary between media (the electric field component parallel to the plane of incidence
and the corresponding perpendicular magnetic field component are shown).
98
CHAPTER 4. REFLECTION AND TRANSMISSION
1 E1⊥ = 1 E1⊥
1 Eipr (0, y, z, t) sin θi − 1 Erpr (0, y, z, t) sin θr = 2 Etpr (0, y, z, t) sin θt
pr
pr
1 Ãpr
i sin θi − 1 Ãr sin θr = 2 Ãt sin θt
pr v2
pr
1 Ãpr
sin θi
i sin θi − 1 Ãr sin θi = 2 Ãt
v1
pr
pr
v1 1 Ãpr
i − v1 1 Ãr = v2 2 Ãt
Ãpr
Ãpr
Ãpr
i
− r = t
µ1 v1 µ1 v1
µ2 v2
Applying the second boundary condition:
k
k
E1 = E2
pr
pr
Ei (0, y, z, t) cos θi + Er (0, y, z, t) cos θr = Etpr (0, y, z, t) cos θt
pr
pr
Ãpr
i cos θi + Ãr cos θi = Ãt cos θt
The third boundary condition is irrelevant in this case, and applying the
fourth yields:
1 k
1 k
B1 = B2
µ1
µ2
1
1
1
Eipr (0, y, z, t) −
Erpr (0, y, z, t) =
Etpr (0, y, z, t)
µ1 v 1
µ1 v 1
µ2 v2
pr
pr
pr
Ãi
Ã
Ã
− r = t
µ1 v1 µ1 v1
µ2 v2
which is identical to the first equation and therefore redundant. Plugging
the first equation into the second yields the reflection coefficient:
Ãpr
i
cos θi +
Ãpr
r
cos θi =
µ2 v2 pr µ2 v2 pr
à −
Ã
cos θt
µ1 v1 i
µ1 v 1 r
pr
pr
pr
µ1 v1 cos θi Ãpr
i − µ2 v2 cos θt Ãi = −µ1 v1 cos θi Ãr − µ2 v2 cos θt Ãr
Rpr =
Ãpr
µ2 v2 cos θt − µ1 v1 cos θi
r
pr =
µ2 v2 cos θt + µ1 v1 cos θi
Ãi
(4.15)
4.2. PLANE WAVES AT OBLIQUE INCIDENCE
99
where cos θt is obtained from Snell’s law. From the first equation:
T pr =
Ãpr
µ2 v 2
2µ2 v2 cos θi
t
(1 − Rpr ) =
pr =
µ1 v 1
µ2 v2 cos θt + µ1 v1 cos θi
Ãi
(4.16)
The process can be repeated to find the reflection and transmission coefficients for the perpendicular electric field/parallel magnetic field components.
Using the geometry of Figure 4.5 to apply the boundary conditions:
Figure 4.5: Geometry for determining reflection and transmission coefficients
for an electromagnetic plane wave obliquely incident on a flat boundary between media (the electric field component perpendicular to the plane of incidence and the corresponding parallel magnetic field component are shown).
100
CHAPTER 4. REFLECTION AND TRANSMISSION
pp
pp
0 = 0 Ãpp
i + Ãr = Ãt
Ãpp
Ãpp
Ãpp
i
sin θi + r sin θr = t sin θt
v1
v1
v2
Ãpp
Ãpp
Ãpp
i
cos θi − r cos θr = t cos θt
µ1 v1
µ1 v1
µ2 v2
Snell’s law and the law of reflection make the third equation equivalent to
the second and therefore redundant. Plugging the second into the fourth and
applying the law of reflection yields the reflection coefficient:
Ãpp
Ãpp
Ãpp
Ãpp
i
cos θi − r cos θi = i cos θt + r cos θt
µ1 v1
µ1 v1
µ2 v2
µ2 v2
pp
pp
pp
µ2 v2 cos θi Ãi − µ1 v1 cos θt Ãi = µ2 v2 cos θi Ãr + µ1 v1 cos θt Ãpp
r
R
pp
Ãpp
µ2 v2 cos θi − µ1 v1 cos θt
r
= pp
=
µ2 v2 cos θi + µ1 v1 cos θt
Ãi
(4.17)
From the second equation:
T
pp
Ãpp
2µ2 v2 cos θi
t
= pp
= 1 + Rpp =
µ2 v2 cos θi + µ1 v1 cos θt
Ãi
(4.18)
Because the reflection and transmission coefficients for the different field
components are not identical, their angles of intromission are different. Rpp
and T pp match the results for an acoustic wave with the substitution of µ for
ρ, so the angle of intromission for the perpendicular electric/parallel magnetic field components is given by Equation 4.13 with the same substitution.
A valid solution for the angle often does not exist, however, because most materials have nearly identical permeabilities. The angle of intromission for the
parallel electric/perpendicular magnetic field components can be calculated
by setting their reflection coefficient equal to zero:
4.2. PLANE WAVES AT OBLIQUE INCIDENCE
101
µ2 v2 cos θt − µ1 v1 cos θi
µ2 v2 cos θt + µ1 v1 cos θi
0 = µ2 v2 cos θt − µ1 v1 cos θi
s
v2
µ1 v1 cos θi = µ2 v2 1 − 22 sin2 θi
v1
0 = Rpr =
v24
sin2 θi
v12
µ21 v14 cos2 θi = µ22 v22 v12 − µ22 v24 (1 − cos2 θi )
µ2 v 2 v 2 − µ2 v 4
cos2 θi = 2 2 2 4 1 2 2 4 2
µ v − µ2 v2
v1 1
u 2
u
v2
−1
u
v1
cos θi = u
2
t
2
µ1 v1
v2
−
v1
µ2 v2
µ21 v12 cos2 θi = µ22 v22 − µ22
Because the permeabilities of most materials are nearly identical (µ1 ≈ µ2 ):
s
cos θi =
v22
v1
or tan θi =
2
2
v2 + v1
v2
(4.19)
In optics, this angle is commonly referred to as Brewster’s Angle. Because
the parallel electric field component is entirely transmitted at this angle, any
reflected light must be linearly polarized with its electric field perpendicular
to the plane of incidence/parallel to the planar surface.
Given that Snell’s law applies equally to electromagnetic and acoustic
waves, critical angles are calculated using the same formula (Equation 4.14).
However, the corresponding reflection coefficients for the two sets of field
components have opposite sign:
µ2 v2 cos(π/2) − µ1 v1 cos θi
= −1
µ2 v2 cos(π/2) + µ1 v1 cos θi
µ2 v2 cos θi − µ1 v1 cos(π/2)
=
=1
µ2 v2 cos θi + µ1 v1 cos(π/2)
Rpr =
Rpp
102
CHAPTER 4. REFLECTION AND TRANSMISSION
indicating a 180-degree phase change for the parallel electric/perpendicular
magnetic field components.
For waves incident upon a conducting surface (v2 = 0), Rpp , Rpr = −1
and T pp , T pr = 0 as expected. The component of the total electric field
parallel to the boundary must therefore be equal to zero at the boundary
kpr
kpr
pr
pr
pr
(Ei + Er → Ãpr
i cos θi + Ãr cos θr = Ãi cos θi − Ãi cos θi = 0 and
kpp
kpp
pp
pp
pp
Ei + Er → Ãpp
i + Ãr = Ãi − Ãi = 0). In addition, the component
of the total magnetic field perpendicular to the boundary must be equal
pp
to zero at the boundary (Bi⊥pr + Br⊥pr → Ãpp
i sin θi /v1 + Ãr sin θr /v1 =
pp
pp
Ãi sin θi /v1 − Ãi sin θi /v1 = 0).
4.3
Non-Plane Waves
It is much more difficult to apply boundary conditions at planar surfaces for
other types of traveling waves. The usual approach is to rewrite the wave as
a linear combination of plane waves as discussed in Chapter 2, calculate the
reflection coefficient for each, and sum the results. If, however, the boundary
is perfectly reflecting, the reflected wave is simply a mirror-image of the
incoming wave. If the boundary is rigid (R = 1), the reflected wave is in
phase with the incident wave. If it is a pressure release boundary, or in the
case of electromagnetic waves a conducting boundary (R = −1), the reflected
wave is 180 degrees out of phase with the incoming wave.
Chapter 5
Cavities and Waveguides
In three dimensions, a finite medium is bounded by surfaces. If the medium
is completely enclosed, it is called a cavity. If it is only partially enclosed
such that waves can freely propagate in one or two dimensions, it is called a
waveguide. This chapter examines the waves in both. As in one dimension,
the wave functions for finite media are determined by applying boundary
conditions to the separable solutions of the wave equation at the enclosing
surfaces. Because the conditions vary depending upon wave type, acoustic
waves will again be considered as a representative of scalar waves and electromagnetic waves as a representative of vector waves. Only the simplest
cases, where the boundaries are perfectly reflecting, will be addressed. Pressure release and rigid boundaries are the two types of perfectly reflecting
boundaries for acoustic waves. As discussed in Subsection 4.1.1, the pressure
must be zero at pressure release boundaries, and the normal component of
the particle velocity must be zero at rigid boundaries:
p = 0 Pressure Release
u⊥ = 0 Rigid
(5.1)
(5.2)
Electromagnetic waves are completely reflected by conducting surfaces. At
conducting boundaries, the parallel component of the electric field and the
perpendicular component of the magnetic field must be zero (see Subsection
4.1.2):
Ek = 0 B⊥ = 0
103
(5.3)
104
CHAPTER 5. CAVITIES AND WAVEGUIDES
The chapter begins by finding the acoustic and electromagnetic wave
functions for a rectangular cavity. It then proceeds to the more complicated
cases of cylindrical and spherical cavities for acoustic waves. Rectangular
waveguides are then addressed for both wave types, and cylindrical waveguides for acoustic waves. Because propagating harmonic waves are bounded
in one or more dimensions in each case, they interfere with their reflections
to produce a discrete set of possible standing waves along those directions
just as in one dimension.
5.1
5.1.1
Rectangular Cavity
Acoustic
Figure 5.1 shows a rectangular cavity with rigid walls. Because the cavity possesses rectangular symmetry, boundary conditions are applied to the
separable solutions in rectangular coordinates. The standing wave solutions
are required for each coordinate because the waves are bounded in all three
directions:
p(x, y, z, t) = (a cos ωt + b sin ωt)(c cos kx x + d sin kx x)
(f cos ky y + g sin ky y)(h cos kz z + l sin kz z)
where:
(ω/v)2 = k 2 = kx2 + ky2 + kz2
Because the rigid boundary condition pertains to particle velocity, Euler’s
equation is required to determine the corresponding condition on the pressure:
∂u
= −∇p
∂t
∂ux
∂uy
∂uz
∂p
∂p
∂p
ρ
x̂ + ρ
ŷ + ρ
ẑ = − x̂ −
ŷ − ẑ
∂t
∂t
∂t
∂x
∂y
∂z
ρ
For the boundaries at x = 0 and x = Lx , ux is the normal component of
particle velocity. The rigid boundary condition therefore requires ux = 0 and
through Euler’s equation:
5.1. RECTANGULAR CAVITY
105
Figure 5.1: Geometry for a rectangular cavity.
∂p
= 0 at x = 0, Lx
∂x
Applying this condition to the standing wave solution at x = 0 yields:
0 = (a cos ωt + b sin ωt)(dkx )(f cos ky y + g sin ky y)(h cos kz z + l sin kz z)
which can only be valid at all values of y, z, and t if d = 0. The solution
therefore becomes:
p(x, y, z, t) = cos kx x(a cos ωt + b sin ωt)
(f cos ky y + g sin ky y)(h cos kz z + l sin kz z)
106
CHAPTER 5. CAVITIES AND WAVEGUIDES
where the constant c has been absorbed into a and b. Applying the boundary
condition at x = Lx :
0 = −kx sin kx Lx (a cos ωt + b sin ωt)
(f cos ky y + g sin ky y)(h cos kz z + l sin kz z)
This can only be valid at all values of y, z, and t if:
sin kx Lx = 0 ⇒ kx Lx = lπ ⇒ kxl =
lπ
Lx
(5.4)
where l is an integer.
The process and the results are identical for the boundaries at y = 0, Ly
and z = 0, Lz . The final wave function is therefore:
p(x, y, z, t) = cos kxl x cos kym y cos kzn z(a cos ωlmn t + b sin ωlmn t)
mπ
nπ
lπ
kym =
kzn =
kxl =
Lx
Ly
Lz
s 2
2
2
m
n
l
ωlmn = vklmn = πv
+
+
Lx
Ly
Lz
(5.5)
(5.6)
(5.7)
where each combination of l, m and n represents a different normal mode and
the corresponding frequencies comprise a harmonic series. If any of the side
lengths (Lx ,Ly ,Lz ) are equal, multiple modes will share the same frequency
in a phenomenon referred to as degeneracy. Figure 5.2 shows cross-sections
of the solutions in the xy-plane for several values of l and m. The nodal
lines visible in the figure where p = 0 become planes when extended in the z
direction. There are l of these in the x direction and m in the y direction.
Because multiple normal modes can exist in the same medium at the
same time, the most general wave function for the cavity is given by:
p(x, y, z, t) =
X
cos kxl x cos kym y cos kzn z(almn cos ωlmn t + blmn sin ωlmn t)
l,m,n
(5.8)
The modal amplitudes, almn and blmn , are determined by applying initial
conditions and using Fourier integrals as outlined in Chapter 1 for a fixed
5.1. RECTANGULAR CAVITY
107
1
0
−1
0
1
l = 1,m = 1
l = 1,m = 0
1
0.5
1
x
2 0
y
0
−1
0
−1
0
1
0.5
1
x
2 0
y
1
1
0.5
1
x
2 0
y
l = 2,m = 2
l = 2,m = 1
1
0
0
−1
0
1
0.5
1
x
2 0
y
Figure 5.2: Cross-sections in the xy-plane of several normal modes for a rigid
rectangular cavity with Lx = 2 and Ly = 1.
string. As in that case, any possible wave initiated in the cavity can be
written as a linear combination of normal modes in this manner.
If the rigid walls of the cavity are replaced with pressure release boundaries, the boundary condition at x = 0 and x = Lx becomes:
p = 0 at x = 0, Lx
Applying it to the standing wave solution yields the wave function:
p(x, y, z, t) = sin kxl x(a cos ωt + b sin ωt)
(f cos ky y + g sin ky y)(h cos kz z + l sin kz z)
where:
108
CHAPTER 5. CAVITIES AND WAVEGUIDES
kxl =
lπ
Lx
Because the boundary condition is identical at y = 0, Ly and z = 0, Lz , the
results are the same along the other directions and the normal modes are
given by:
p(x, y, z, t) = sin kxl x sin kym y sin kzn z(a cos ωlmn t + b sin ωlmn t)
lπ
mπ
nπ
kxl =
kym =
kzn =
Lx
Ly
Lz
s 2
2
2
l
m
n
ωlmn = πv
+
+
Lx
Ly
Lz
(5.9)
(5.10)
(5.11)
The first few are illustrated in Figure 5.3, where there is one less nodal plane
along each direction than for the same mode in a rigid cavity.
5.1.2
Electromagnetic
Consider electromagnetic waves in a rectangular cavity with conducting walls
and the dimensions shown in Figure 5.1. The separable solution for each
component of the electric field is identical to that for acoustic pressure:
Es (x, y, z, t) = ãs e−iωt (cs cos kx x + ds sin kx x)
(fs cos ky y + gs sin ky y)(hs cos kz z + ls sin kz z)
s =x, y or z
where the complex form of the time dependence is being used to simplify the
mathematics. The condition that the parallel component of the electric field
vanish at each of the conducting boundaries requires:
Ex = 0 at y = 0, Ly and z = 0, Lz
Ey = 0 at x = 0, Lx and z = 0, Lz
Ez = 0 at x = 0, Lx and y = 0, Ly
5.1. RECTANGULAR CAVITY
109
1
0
−1
0
1
l = 2,m = 1
l = 1,m = 1
1
0.5
1
x
2 0
y
0
−1
0
−1
0
1
0.5
1
x
2 0
y
1
1
0.5
1
x
2 0
y
l = 2,m = 2
l = 1,m = 2
1
0
0
−1
0
1
0.5
1
x
2 0
y
Figure 5.3: Cross-sections in the xy-plane of several normal modes for a
pressure release rectangular cavity with Lx = 2 and Ly = 1.
Applying the top condition to the separable solution for Ex requires hx =
0, fx = 0, ky = mπ/Ly , and kz = nπ/Lz . Applying the remaining two
conditions results in similar restrictions on the solutions for Ey and Ez such
that:
Ex = ãx e−iωlmn t (cx cos kxl x + dx sin kxl x) sin kym y sin kzn z
Ey = ãy e−iωlmn t sin kxl x(fy cos kym y + gy sin kym y) sin kzn z
Ez = ãz e−iωlmn t sin kxl x sin kym y(hz cos kzn z + lz sin kzn z)
where:
110
CHAPTER 5. CAVITIES AND WAVEGUIDES
lπ
mπ
nπ
kym =
kzn =
Lx
Ly
Lz
s 2
2
2
l
m
n
= πv
+
+
Lx
Ly
Lz
kxl =
ωlmn
These solutions must also satisfy Maxwell’s equations. Forcing them to
be divergenceless:
0 = ∇ · E = ãx e−iωlmn t (−cx kxl sin kxl x + dx kxl cos kxl x) sin kym y sin kzn z
+ ãy e−iωlmn t sin kxl x(−fy kym sin kym y + gy kym cos kym y) sin kzn z
+ ãz e−iωlmn t sin kxl x sin kym y(−hz kzn sin kzn z + lz kzn cos kzn z)
For this to be valid at all values of x, y, z and t, the functions in each of the
summed terms must be identical. As a result, dx , gy and lz must be zero.
The equation then becomes:
0 = −ãx kxl e−iωlmn t sin kxl x sin kym y sin kzn z
− ãy kym e−iωlmn t sin kxl x sin kym y sin kzn z
− ãz kzn e−iωlmn t sin kxl x sin kym y sin kzn z
where the remaining constants have been absorbed into ãx , ãy , and ãz . Dividing by the common functions yields:
0 = ãx kxl + ãy kym + ãz kzn
which implies that one of the remaining constants is determined by the values
of the other two.
The corresponding magnetic field is obtained from Faraday’s law:
∂B
= iωB
∇×E =−
∂t
−i ∂Ex ∂Ez
−i ∂Ey ∂Ex
−i ∂Ez ∂Ey
Bx =
−
By =
−
Bz =
−
ω
∂y
∂z
ω
∂z
∂x
ω
∂x
∂y
5.1. RECTANGULAR CAVITY
111
Plugging in the solutions for the components of the electric field and using
−i = e−iπ/2 :
Bx =
1
(ãz kym − ãy kzn )e−i(ωlmn t+π/2) sin kxl x cos kym y cos kzn z
ωlmn
1
By =
(ãx kzn − ãz kxl )e−i(ωlmn t+π/2) cos kxl x sin kym y cos kzn z
ωlmn
1
Bz =
(ãy kxl − ãx kym )e−i(ωlmn t+π/2) cos kxl x cos kym y sin kzn z
ωlmn
These solutions also satisfy the remaining two Maxwell’s equations as well as
the remaining boundary condition that the perpendicular component of the
magnetic field vanish at each of the conducting surfaces:
Bx = 0 at x = 0, Lx
By = 0 at y = 0, Ly
Bz = 0 at z = 0, Lz
It is common practice to divide the solutions into two independent sets.
The first are referred to as transverse electric (TE) solutions because there
is no z component of the electric field, meaning that ãz = 0 and therefore
ãy = −(kxl /kym )ãx from Gauss’ law. Making these substitutions yields:
Ex = ax cos(ωlmn t + δ) cos kxl x sin kym y sin kzn z
kxl
Ey = −
ax cos(ωlmn t + δ) sin kxl x cos kym y sin kzn z
kym
Ez = 0
(5.12)
where the imaginary part of the solutions has been excluded and the remaining constants ax and δ are determined by initial conditions. The corresponding magnetic field components are given by:
112
CHAPTER 5. CAVITIES AND WAVEGUIDES
1 kzn kxl
ax cos(ωlmn t + δ + π/2) sin kxl x cos kym y cos kzn z
ωlmn kym
1
By =
kzn ax cos(ωlmn t + δ + π/2) cos kxl x sin kym y cos kzn z
(5.13)
ωlmn
2
2
+ kym
−1 kxl
Bz =
ax cos(ωlmn t + δ + π/2) cos kxl x cos kym y sin kzn z
ωlmn kym
Bx =
The second independent set are called transverse magnetic (TM) solutions
because there is no z component of the magnetic field, meaning that ãy kxl −
ãx kym = 0 and therefore ãy = (kym /kxl )ãx . In addition, from Gauss’ law:
2
kym
+ ãz kzn
kxl
2
2
kxl
+ kym
ãz = −
ãx
kxl kzn
0 = ãx kxl + ãx
The components of the electric field are therefore given by:
Ex = ax cos(ωlmn t + δ) cos kxl x sin kym y sin kzn z
kym
Ey =
ax cos(ωlmn t + δ) sin kxl x cos kym y sin kzn z
kxl
2
2
kxl
+ kym
Ez = −
ax cos(ωlmn t + δ) sin kxl x sin kym y cos kzn z
kxl kzn
(5.14)
and the components of the magnetic field by:
1 kym kxl − kym kzn
ax cos(ωlmn t + δ + π/2) sin kxl x cos kym y cos kzn z
ωlmn
kxl
2
2
2
+ kym
+ kzn
1 kxl
By =
ax cos(ωlmn t + δ + π/2) cos kxl x sin kym y cos kzn z
ωlmn
kzn
(5.15)
Bx =
Bz = 0
5.2. CYLINDRICAL CAVITY
5.2
113
Cylindrical Cavity
The wave functions for a cylindrical cavity of the type illustrated in Figure
5.4 are found by applying boundary conditions to the standing wave solutions
for cylindrical coordinates (see Subsection 2.2.3):
p(r, φ, z, t) = (a cos ωt + b sin ωt)[f Jm (kr r) + gNm (kr r)]
(c cos mφ + d sin mφ)(h cos kz z + l sin kz z)
where:
(ω/v)2 = k 2 = kr2 + kz2
Figure 5.4: Geometry for a cylindrical cavity.
114
CHAPTER 5. CAVITIES AND WAVEGUIDES
For rigid boundaries, the normal component of particle velocity (ur at r = a
and uz at z = 0, L) must be zero. Euler’s equation in cylindrical coordinates
is given by:
∂ur
∂uφ
∂uz
∂p
1 ∂p
∂p
r̂ + ρ
φ̂ + ρ
ẑ = − r̂ −
φ̂ − ẑ
(5.16)
∂t
∂t
∂t
∂r
r ∂φ
∂z
Consequently, the corresponding boundary conditions on the pressure are:
ρ
∂p
= 0 at r = a
∂r
∂p
= 0 at z = 0, L
∂z
Because the Nuemann functions explode at r = 0, g = 0 in the standing
wave solution. Applying the first boundary condition to what remains:
0
0 = (a cos ωt + b sin ωt)kr Jm
(kr a)
(c cos mφ + d sin mφ)(h cos kz z + l sin kz z)
0
where Jm
is the derivative of Jm . This can only be valid at all values of φ,
z, and t if:
0
0
0
Jm
(kr a) = 0 ⇒ kr a = Uml
⇒ krml = Uml
/a
(5.17)
0
0
where Uml
is the l’th root of Jm
. Because the slope of a function is zero at
0
its extrema, the l’th root of Jm is also the l’th extremum of Jm . Figure 5.5
shows the first two for m = 0.
Applying the remaining boundary condition at z = 0, L yields the same
results as for a rigid rectangular cavity. The normal modes are therefore:
p(r, φ, z, t) = Jm (krml r)(c cos mφ + d sin mφ)
cos kzn z(a cos ωmln t + b sin ωmln t)
nπ
0
krml = Uml
/a kzn =
L
s
2
nπ 2
0
Uml
ωmln = v
+
a
L
(5.18)
(5.19)
(5.20)
5.2. CYLINDRICAL CAVITY
115
1.5
0
U01
U01
0
U02
U02
J0(U )
1
0.5
0
−0.5
0
1
2
3
4
5
6
7
8
9
10
U
Figure 5.5: The first few roots and extrema for J0 .
where the constants c and d simply determine the orientation of the mode
about the z-axis, and are set by initial conditions along with a and b. Figure
5.6 shows cross-sections of the solutions in the xy-plane for several values of
m and l with c = 1 and d = 0. Notice the presence of nodal circles at the
roots of the Bessel functions and nodal lines that cut through the origin at
the roots of cos mφ. When extended in the z direction, these become nodal
cylinders and planes respectively. For the mln mode, there are m nodal
planes, l nodal cylinders, and an additional n horizontal nodal planes along
the z direction.
For pressure release boundaries, the boundary conditions on the pressure
are:
1
0
1
−1
−1
0
0
x
y
1 −1
1
0
1
−1
−1
0
0
x
l = 2,m = 0
CHAPTER 5. CAVITIES AND WAVEGUIDES
y
1 −1
l = 2,m = 1
l = 1,m = 1
l = 1,m = 0
116
1
0
1
−1
−1
0
0
x
y
1 −1
1
0
1
−1
−1
0
0
x
1 −1
y
Figure 5.6: Cross-sections in the xy-plane of several normal modes for a rigid
cylindrical cavity with a = 1.
p = 0 at r = a
p = 0 at z = 0, L
Applying the first boundary condition yields:
0 = (a cos ωt + b sin ωt)Jm (kr a)
(c cos mφ + d sin mφ)(h cos kz z + l sin kz z)
which can only be valid at all values of φ, z, and t if:
Jm (kr a) = 0 ⇒ kr a = Uml ⇒ krml = Uml /a
(5.21)
5.3. SPHERICAL CAVITY
117
where Uml is the l’th root of Jm . Figure 5.5 shows the first two for m = 0.
The results for the second boundary condition are the same as for a pressure
release rectangular cavity, so the normal modes are given by:
p(r, φ, z, t) = Jm (krml r)(c cos mφ + d sin mφ)
sin kzn z(a cos ωmln t + b sin ωmln t)
nπ
krml = Uml /a kzn =
L
s
2 nπ 2
Uml
ωmln = v
+
a
L
(5.22)
(5.23)
(5.24)
The first few are illustrated in Figure 5.7. Each has m nodal planes through
the origin, l − 1 nodal cylinders, and n − 1 horizontal nodal planes along the
z direction.
5.3
Spherical Cavity
For a spherical cavity of the type shown in Figure 5.8, boundary conditions
are applied to the standing wave solutions for spherical coordinates (see Subsection 2.2.2):
|m|
p(r, θ, φ, t) = (a cos ωt + b sin ωt)Pl (cos θ)
[f jl (kr) + gnl (kr)](c cos mφ + d sin mφ)
where:
ω/v = k
If the boundary is rigid, ur = 0 at r = a. Euler’s equation in spherical
coordinates is given by:
ρ
∂uθ
∂uφ
∂p
1 ∂p
1 ∂p
∂ur
r̂ + ρ
θ̂ + ρ
φ̂ = − r̂ −
θ̂ −
φ̂
∂t
∂t
∂t
∂r
r ∂θ
r sin θ ∂φ
The corresponding boundary condition on the pressure is therefore:
(5.25)
1
0
1
−1
−1
0
0
x
y
1 −1
1
0
1
−1
−1
0
0
x
l = 2,m = 0
CHAPTER 5. CAVITIES AND WAVEGUIDES
y
1 −1
l = 2,m = 1
l = 1,m = 1
l = 1,m = 0
118
1
0
1
−1
−1
0
0
x
y
1 −1
1
0
1
−1
−1
0
0
x
1 −1
y
Figure 5.7: Cross-sections in the xy-plane of several normal modes for a
pressure release cylindrical cavity with a = 1.
∂p
= 0 at r = a
∂r
Because the spherical Neumann functions explode at r = 0, g = 0 in the
standing wave solution. Applying the boundary condition therefore yields:
|m|
0 = (a cos ωt + b sin ωt)Pl (cos θ)kjl0 (ka)(c cos mφ + d sin mφ)
where jl0 is the derivative of jl . This can only be valid at all values of θ, φ,
and t if:
jl0 (ka) = 0 ⇒ ka = u0ln ⇒ kln = u0ln /a
(5.26)
5.3. SPHERICAL CAVITY
119
Figure 5.8: Geometry for a spherical cavity.
where u0ln is the n’th root of the derivative of jl , which is also the n’th
extremum of jl . Figure 5.9 shows the first two for l = 0. The normal modes
for a rigid spherical cavity are therefore given by:
|m|
p(r, θ, φ, t) = jl (kln r)Pl (cos θ)(c cos mφ + d sin mφ)
(a cos ωln t + b sin ωln t)
u0
kln = u0ln /a ωln = v ln
a
(5.27)
(5.28)
where c and d determine the orientation of the mode about the z-axis, and
are set by initial conditions along with a and b. Figure 5.10 shows the angular
dependence of the solutions for several values of l and m with c = 1 and d = 0.
Notice the presence of nodal planes along φ at the roots of cos mφ and nodal
120
CHAPTER 5. CAVITIES AND WAVEGUIDES
1.5
u001
u01
u002
u02
j0(u)
1
0.5
0
−0.5
0
1
2
3
4
5
6
7
8
9
10
u
Figure 5.9: The first few roots and extrema for j0 .
cones along θ at the roots of the Associated Legendre polynomials. Figure
5.11 shows the radial dependence specified by the spherical Bessel functions
for several values of l and n. Each root corresponds to the presence of a
nodal sphere at that radius.
For a pressure release boundary, applying the boundary condition p = 0
at r = a yields:
|m|
0 = (a cos ωt + b sin ωt)Pl (cos θ)jl (ka)(c cos mφ + d sin mφ)
which can only be valid at all values of θ, φ, and t if:
jl (ka) = 0 ⇒ ka = uln ⇒ kln = uln /a
(5.29)
where uln is the n’th root of jl . Figure 5.9 shows the first two for l = 0. The
normal modes are therefore:
1
0
−1
−1
1
0
0
−1
−1
x 1 −1 y
0
x
0
−2
−2
1
0
2
2
0
1
0
l = 2,m = 1
z
l = 2,m = 0
z
121
l = 1,m = 1
z
l = 1,m = 0
z
5.3. SPHERICAL CAVITY
0
y
0.5
0
−0.5
−0.5
0.5
0
x 2 −2 y
1 −1
0
x 0.5 −0.5 y
Figure 5.10: Angular dependence of several normal modes for a spherical
cavity.
|m|
p(r, θ, φ, t) = jl (kln r)Pl (cos θ)(c cos mφ + d sin mφ)
(a cos ωln t + b sin ωln t)
uln
kln = uln /a ωln = v
a
(5.30)
(5.31)
where the angular dependence is the same as for a rigid spherical cavity.
Figure 5.12 shows the radial dependence for several modes.
122
CHAPTER 5. CAVITIES AND WAVEGUIDES
1.5
l
l
l
l
jl (kln r)
1
= 1,n
= 1,n
= 2,n
= 2,n
=1
=2
=1
=2
0.5
0
−0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
r
Figure 5.11: Radial dependence of several normal modes for a rigid spherical
cavity with a = 1.
5.4
5.4.1
Rectangular Waveguide
Acoustic
Figure 5.13 shows a rectangular waveguide. Because waves are free to propagate along the z-axis, boundary conditions are applied to the separable
solutions in rectangular coordinates comprised of traveling wave functions
along that direction and standing wave functions along the other two:
p(x, y, z, t) = Ãei(±kz z−ωt) (c cos kx x + d sin kx x)(f cos ky y + g sin ky y)
where:
(ω/v)2 = k 2 = kx2 + ky2 + kz2
5.4. RECTANGULAR WAVEGUIDE
123
1.5
l
l
l
l
jl (kln r)
1
= 1,n
= 1,n
= 2,n
= 2,n
=1
=2
=1
=2
0.5
0
−0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
r
Figure 5.12: Radial dependence of several normal modes for a pressure release
spherical cavity with a = 1.
For rigid boundaries, applying the boundary conditions at x = 0, Lx and y =
0, Ly is identical to the process for a rigid rectangular cavity. Consequently,
the normal modes for the waveguide are given by:
p(x, y, z, t) = Ãei(±kz z−ωlm t) cos kxl x cos kym y
mπ
lπ
kym =
kxl =
Lx
Ly
s 2
2
lπ
mπ
ωlm = v
+
+ kz2
Lx
Ly
(5.32)
(5.33)
(5.34)
Consider the case where m = 0. Using Euler’s identity, the normal mode
for the wave propagating in the +z direction can be rewritten in the following
124
CHAPTER 5. CAVITIES AND WAVEGUIDES
Figure 5.13: Geometry for a rectangular waveguide.
manner:
1
1
Ãei(kz z−ωl0 t) cos kxl x = Ãei(kz z+kxl x−ωl0 t) + Ãei(kz z−kxl x−ωl0 t)
2
2
which represents two interfering plane waves propagating at the angles:
±kxl
kxl
= ± tan−1
kz
kz
with respect to the z-axis as illustrated in Figure 5.14. The second wave
is the reflection of the first off of the boundary at x = Lx , and the first is
the reflection of the second off of the boundary at x = 0. Consequently,
this normal mode simply represents an individual plane wave propagating
through the waveguide at angle θ while constructively interfering with its
θ = tan−1
5.4. RECTANGULAR WAVEGUIDE
125
reflections. Each value of l corresponds to a plane wave propagating at a
different angle. Other angles are disallowed because the interference between
the plane wave and its reflections is destructive.
Figure 5.14: Wavevectors for a plane wave and its reflection propagating
through a rectangular waveguide.
For the case where m 6= 0, the expansion of the modes becomes:
1
Ãei(kz z−ωlm t) cos kxl x cos kym y = Ãei(kz z+kxl x+kym y−ωlm t)
4
1 i(kz z+kxl x−kym y−ωlm t) 1 i(kz z−kxl x+kym y−ωlm t)
+ Ãe
+ Ãe
4
4
1 i(kz z−kxl x−kym y−ωlm t)
+ Ãe
4
126
CHAPTER 5. CAVITIES AND WAVEGUIDES
Figure 5.15 shows the wavevectors for the plane waves. The reflection for
each wavevector at one of the boundaries is one of the other three wavevectors. For example, when the wavevector in the first quadrant encounters the
boundary at x = Lx , its reflection is the wavevector in the second quadrant.
Alternatively, when it encounters the boundary at y = Ly , its reflection is
the wavevector in the fourth quadrant. Each mode therefore represents a
single plane wave constructively interfering with its reflections as it propagates through the waveguide. Different combinations of l and m correspond
to different possible wavevector orientations.
Figure 5.15: Wavevectors for a plane wave and its reflections propagating
through a rectangular waveguide.
As illustrated in the figure, the angle of the wavevector for mode lm with
respect to the z-axis is given by:
5.4. RECTANGULAR WAVEGUIDE
θ = sin−1
q
2
2
kxl
+ kym
k
127
r
= sin−1
lπ
Lx
2
+
mπ
Ly
ω/v
2
(5.35)
The angle increases as the mode number increases until it reaches 90 degrees and the wave no longer propagates. Consequently, there is a limited
number of modes that can travel through a waveguide for a given wavenumber/frequency. The frequency below which waves won’t propagate for a given
mode is called the cutoff frequency for that mode. From the above equation:
r
sin(π/2) = 1 =
s
ωclm = v
lπ
Lx
lπ
Lx
2
2
+
mπ
Ly
2
ω/v
2
mπ
+
Ly
(5.36)
The propagation speed for the combined wave through the waveguide,
also called the phase speed, varies by mode:
vplm =
ω
ω
=q
kz
2
2
k 2 − kxl
− kym
ω
=r
2 2
(ω/v)2 − Llπx + mπ
Ly
v
=p
1 − (ωclm /ω)2
(5.37)
(5.38)
Counterintuitively, its value is greater than v and increases with mode number as the propagation angle increases. However, it does not represent the
speed at which energy propagates through the waveguide. That quantity is
determined by the group velocity, which is the speed at which the constituent
reflecting plane waves travel through the channel:
128
CHAPTER 5. CAVITIES AND WAVEGUIDES
vglm = v cos θ = v
kz
k
r
(ω/v)2 −
=v
=v
lπ
Lx
2
+
mπ
Ly
2
ω/v
p
1 − (ωclm /ω)2
(5.39)
(5.40)
As expected, its value is less than v and decreases with increasing mode
number as the propagation angle increases.
For a waveguide with pressure release boundaries, the boundary conditions at x = 0, Lx and y = 0, Ly change to those for a pressure release
rectangular cavity. The normal modes therefore become:
p(x, y, z, t) = Ãei(±kz z−ωlm t) sin kxl x sin kym y
mπ
lπ
kym =
kxl =
Lx
Ly
s 2
2
mπ
lπ
ωlm = v
+
+ kz2
Lx
Ly
(5.41)
(5.42)
(5.43)
where the cosine functions have become sine functions that introduce negative signs into the plane wave expansion, indicating that they undergo a
180 degree phase change when reflected at the pressure release boundaries.
Otherwise, the results are identical.
5.4.2
Electromagnetic
For electromagnetic waves in a rectangular waveguide, the initial wave function for each component of the electric field is the same as for acoustic pressure:
Es (x, y, z, t) = Ãs ei(±kz−ωt) (cs cos kx x + ds sin kx x)(fs cos ky y + gs sin ky y)
s = x, y, or z
If the walls of the waveguide are conducting and have the dimensions shown
in Figure 5.13, the boundary condition on the electric field (E k = 0) requires:
5.4. RECTANGULAR WAVEGUIDE
129
Ex = 0 at y = 0, Ly
Ey = 0 at x = 0, Lx
Ez = 0 at x = 0, Lx and y = 0, Ly
Applying these conditions in the same manner as for a conducting rectangular
cavity yields:
Ex = Ãx ei(±kz z−ωlm t) (cx cos kxl x + dx sin kxl x) sin kym y
Ey = Ãy ei(±kz z−ωlm t) sin kxl x(fy cos kym y + gy sin kym y)
Ez = Ãz ei(±kz z−ωlm t) sin kxl x sin kym y
mπ
lπ
kym =
kxl =
Lx
Ly
s 2
2
lπ
mπ
ωlm = v
+
+ kz2
Lx
Ly
Forcing these solutions to be divergenceless:
0 = ∇ · E = Ãx ei(±kz z−ωlm t) (−cx kxl sin kxl x + dx kxl cos kxl x) sin kym y
+ Ãy ei(±kz z−ωlm t) sin kxl x(−fy kym sin kym y + gy kym cos kym y)
± ikz Ãz ei(±kz z−ωlm t) sin kxl x sin kym y
For this to be valid at all values of x, y, z and t, the functions in each of
the summed terms must be identical. Consequently, dx = gy = 0 and the
equation becomes:
0 = −Ãx kxl ei(±kz z−ωlm t) sin kxl x sin kym y
− Ãy kym ei(±kz z−ωlm t) sin kxl x sin kym y
± iÃz kz ei(±kz z−ωlm t) sin kxl x sin kym y
where the remaining constants have been absorbed into Ãx and Ãy . Dividing
by the common functions yields:
130
CHAPTER 5. CAVITIES AND WAVEGUIDES
0 = Ãx kxl + Ãy kym ∓ iÃz kz
which implies that one of the remaining constants is determined by the values
of the other two.
The corresponding magnetic field is obtained from Faraday’s law:
∂B
= iωB
∇×E =−
∂t
−i ∂Ez ∂Ey
−i ∂Ex ∂Ez
−i ∂Ey ∂Ex
Bx =
−
By =
−
Bz =
−
ω
∂y
∂z
ω
∂z
∂x
ω
∂x
∂y
Inserting the solution for the electric field and using −i = e−iπ/2 :
1
(Ãz kym ∓ iÃy kz )ei(±kz z−ωlm t−π/2) sin kxl x cos kym y
ωlm
1
By =
(±iÃx kz − Ãz kxl )ei(±kz z−ωlm t−π/2) cos kxl x sin kym y
ωlm
1
(Ãy kxl − Ãx kym )ei(±kz z−ωlm t−π/2) cos kxl x cos kym y
Bz =
ωlm
Bx =
These solutions also satisfy the remaining Maxwell’s equations and the
boundary condition on the magnetic field (B ⊥ = 0):
Bx = 0 at x = 0, Lx
By = 0 at y = 0, Ly
For the TE solutions, Ãz = 0 implying that Ãy = −(kxl /kym )Ãx from
Gauss’ law. Making these substitutions yields:
Ex = Ãx ei(±kz z−ωlm t) cos kxl x sin kym y
kxl
Ey = −
Ãx ei(±kz z−ωlm t) sin kxl x cos kym y
kym
Ez = 0
The corresponding magnetic field components are given by:
(5.44)
5.4. RECTANGULAR WAVEGUIDE
±i kz kxl
Ãx ei(±kz z−ωlm t−π/2) sin kxl x cos kym y
ωlm kym
±i
kz Ãx ei(±kz z−ωlm t−π/2) cos kxl x sin kym y
By =
ωlm
2
2
+ kym
−1 kxl
Bz =
Ãx ei(±kz z−ωlm t−π/2) cos kxl x cos kym y
ωlm kym
131
Bx =
(5.45)
For the TM solutions, Ãy = (kym /kxl )Ãx . In addition, from Gauss’ law:
2
kym
0 = Ãx kxl + Ãx
∓ iÃz kz
kxl
2
2
kxl
+ kym
Ãz = ∓i
Ãx
kxl kz
The components of the electric field are therefore given by:
Ex = Ãx ei(±kz z−ωlm t) cos kxl x sin kym y
kym
Ey =
Ãx ei(±kz z−ωlm t) sin kxl x cos kym y
kxl
2
2
kxl
+ kym
Ãx ei(±kz z−ωlm t) sin kxl x sin kym y
Ez = ∓i
kxl kz
(5.46)
and the components of the magnetic field by:
2
2
+ kym
+ kz2
∓i kxl
Bx =
kym Ãx ei(±kz z−ωlm t−π/2) sin kxl x cos kym y
ωlm
kxl kz
2
2
+ kym
+ kz2
±i kxl
By =
Ãx ei(±kz z−ωlm t−π/2) cos kxl x sin kym y
(5.47)
ωlm
kz
Bz = 0
Because the allowed wavevectors for electromagnetic and acoustic waves in
a rectangular waveguide are identical, the cutoff frequencies, phase speeds,
and group velocities are all the same.
132
5.5
CHAPTER 5. CAVITIES AND WAVEGUIDES
Cylindrical Waveguide
Figure 5.16 shows a cylindrical waveguide. The radial boundary condition is
applied to the separable solutions for cylindrical coordinates with standing
wave functions along that direction and traveling wave functions along the z
direction:
p(r, φ, z, t) = Ãei(±kz z−ωt) Jm (kr r)(c cos mφ + d sin mφ)
where the Neumann functions have been excluded because they explode at
the origin and:
(ω/v)2 = k 2 = kr2 + kz2
Figure 5.16: Geometry for a cylindrical waveguide.
5.5. CYLINDRICAL WAVEGUIDE
133
For rigid boundaries, applying the boundary condition at r = a is identical
to the process for a rigid cylindrical cavity. The normal modes are therefore
given by:
p(r, φ, z, t) = Ãei(±kz z−ωml t) Jm (krml r)(c cos mφ + d sin mφ)
0
krml = Uml
/a
s
2
0
Uml
ωml = v
+ kz2
a
(5.48)
(5.49)
(5.50)
where c and d determine the orientation of the mode about the z-axis.
Although the waves that propagate through
q the waveguide are more com2
2 . Consequently, the
+ kym
plex than plane waves, krml is equivalent to kxl
cutoff frequency is:
ωcml = v
0
Uml
a
(5.51)
and the phase speed/group velocity are:
vpml = r
ω
(ω/v)2 −
vgml
0
Uml
a
2
v
=p
1 − (ωcml /ω)2
r
0 2
U
2
(ω/v) − aml
=v
ω/v
p
= v 1 − (ωcml /ω)2
(5.52)
(5.53)
(5.54)
(5.55)
For a cylindrical waveguide with a pressure release boundary, the radial
boundary condition changes to that for a pressure release cylindrical cavity.
The normal modes therefore become:
134
CHAPTER 5. CAVITIES AND WAVEGUIDES
p(r, φ, z, t) = Ãei(±kz z−ωml t) Jm (krml r)(c cos mφ + d sin mφ)
krml = Uml /a
s
2
Uml
ωml = v
+ kz2
a
(5.56)
(5.57)
(5.58)
The expressions for the cutoff frequency, phase speed and group speed remain the same, but with the Bessel function roots (Uml ) replacing the Bessel
0
function extrema (Uml
).
Chapter 6
Radiation
Section 1.10 describes two different methods for finding the radiated wave
produced by a harmonic source in one dimension. The first is to treat the surface of the source as a medium boundary, and impose boundary conditions on
separable solutions to the wave equation that are consistent with the behavior of the source. The next section extends that method to three dimensions,
using pulsating (expanding and contracting) and vibrating (moving side to
side) spherical sources that produce acoustic waves as examples.
The second method is to adapt the wave equation to account for the
presence of the source and solve it. The remainder of the chapter addresses
this approach in three dimensions. It begins by discussing how the wave
equation can be solved when it includes a source term by recasting it in
integral form. It then applies the method to a series of point sources and
extended sources.
6.1
Boundary Condition Method
Applying boundary conditions to the separable solutions of the wave equation in a given coordinate system requires the surface of the boundary to
correspond to a constant spatial coordinate. In spherical coordinates, for example, the boundary must be spherical (r =constant), conical (θ =constant)
or planar (φ =constant). Consequently, the boundary condition method for
finding radiated wave functions is limited to sources with simple, symmetrical
shapes such as spheres, cylinders and cones.
135
136
CHAPTER 6. RADIATION
6.1.1
Pulsating Sphere
As a first example, consider a harmonically pulsating sphere radiating acoustic waves into a fluid. Because the radiator has a spherical shape and the
waves it produces are free to propagate, boundary conditions are applied to
the traveling wave solutions in spherical coordinates:
p(r, θ, φ, t) =
X
(1)
(2)
Ãlm e−iωt [f˜lm hl (kr) + g̃lm hl (kr)]
l,m
|m|
Pl (cos θ)(c̃lm eimφ + d˜lm e−imφ )
The radiated waves only propagate outward, so g̃lm = 0 leaving:
p(r, θ, φ, t) =
X
(1)
|m|
Ãlm e−iωt hl (kr)Pl (cos θ)(c̃lm eimφ + d˜lm e−imφ )
l,m
where f˜lm has been absorbed into Ãlm . Assuming that the pulsating sphere is
centered on the origin with radius a as illustrated in Figure 6.1, the velocity
of its surface is given by:
u(a, θ, φ, t) = ũ0 e−iωt r̂
(6.1)
The velocity of the surrounding fluid must be identical. This boundary condition on the fluid velocity can be applied to the pressure using Euler’s equation
in spherical coordinates:
∂uθ
∂uφ
∂p
1 ∂p
1 ∂p
∂ur
r̂ + ρ
θ̂ + ρ
φ̂ = − r̂ −
θ̂ −
φ̂
∂t
∂t
∂t
∂r
r ∂θ
r sin θ ∂φ
Plugging the expressions for fluid velocity and pressure at the sphere’s surface
into the radial component:
ρ
−iωρũ0 e−iωt r̂ = −
X
0 (1)
|m|
Ãlm e−iωt khl (ka)Pl (cos θ)(c̃lm eimφ + d˜lm e−imφ )r̂
l,m
0 (1)
(1)
where hl is the derivative of hl . Because the fluid velocity has no angular
dependence, this equation can only be valid if l = m = 0. Solving what
remains for the amplitude of the pressure:
6.1. BOUNDARY CONDITION METHOD
137
Figure 6.1: Geometry for a pulsating sphere.
iρvũ0
Ã00 =
0 (1)
h0 (ka)
Consequently, the wave function for the radiated pressure is given by:
iρvũ0
p(r, θ, φ, t) =
0 (1)
h0 (ka)
(1)
h0 (kr)e−iωt
(1)
Using h0 (kr) = −ieikr /kr, the solution can be rewritten as:
p(r, θ, φ, t) =
ei(kr−ωt)
0 (1)
h0 (ka) kr
ρvũ0
(6.2)
which is a simple, outgoing spherical wave. Substituting for the derivative of
the spherical Hankel function as well yields:
138
CHAPTER 6. RADIATION
p(r, θ, φ, t) = ρvũ0
(ka)2 −ika ei(kr−ωt)
e
ka + i
kr
For small spheres where ka 1, this becomes:
p(r, θ, φ, t) ≈ −iρvũ0 (ka)2
6.1.2
ei(kr−ωt)
kr
(6.3)
Vibrating Sphere
Next, consider a vibrating sphere. If the coordinate system is oriented such
that the sphere vibrates along the z-axis as illustrated in Figure 6.2, the
surface velocity of the sphere is given by:
u(a, θ, φ, t) = ũ0 e−iωt ẑ = ũ0 e−iωt cos θr̂ − ũ0 e−iωt sin θθ̂
(6.4)
where the unit vector ẑ has been rewritten in terms of its spherical components. Assuming that the surface of the sphere is smooth, only the radial
component of its velocity causes fluid motion. The fluid velocity at the surface of the sphere must therefore be:
u(a, θ, φ, t) = ũ0 cos θe−iωt r̂
Plugging this boundary condition into the radial component of Euler’s equation along with the separable solution for the pressure yields:
−iωρũ0 cos θe−iωt = −
X
0 (1)
|m|
Ãlm e−iωt khl (ka)Pl (cos θ)(c̃lm eimφ + d˜lm e−imφ )
l,m
For the angular dependence on the left and right to match, l = 1 and m = 0.
Solving for the amplitude of the remaining term in the sum:
Ã10 =
iρvũ0
0 (1)
h1 (ka)
The wave function for the radiated pressure is therefore:
p(r, θ, φ, t) =
iρvũ0
0 (1)
h1 (ka)
Given that:
(1)
h1 (kr) cos θe−iωt
6.1. BOUNDARY CONDITION METHOD
139
Figure 6.2: Geometry for a vibrating sphere.
(1)
h1 (kr)
1
i
=−
+
eikr
kr (kr)2
where the second term in the sum can be dropped in the far-field where
kr 1. Substituting this simplified form into the solution yields:
p(r, θ, φ, t) ≈ −
iρvũ0
0 (1)
h1 (ka)
cos θ
ei(kr−ωt)
kr
(6.5)
which is a spherical wave. Plugging in the derivative of the spherical Hankel
function:
p(r, θ, φ, t) ≈ −iρvũ0
(ka)3
ei(kr−ωt)
−ika
e
cos
θ
2i + 2(ka) − i(ka2 )
kr
140
CHAPTER 6. RADIATION
For small spheres where ka 1:
1
ei(kr−ωt)
p(r, θ, φ, t) ≈ − ρvũ0 (ka)3 cos θ
2
kr
6.1.3
(6.6)
Sources Near Boundaries
The boundary condition method can also be used to find the radiated wave
function for a source located near physical boundaries. However, the boundary conditions for the source must be applied to separable solutions that also
satisfy the boundary conditions for the physical boundaries. For example, if
a source is located inside a rectangular waveguide, the boundary conditions
for the source must be applied to the solutions derived in Section 5.4.
6.2
Inhomogeneous Wave Equation Method
More complex source shapes are amenable to the alternative method of
adapting the wave equation to account for the presence of the source, although finding solutions usually requires making approximations. In general,
the adapted scalar wave equation takes the form:
1 ∂ 2ψ
= −f (r, t)
(6.7)
v 2 ∂t2
where the exact expression for f depends upon the type of wave under consideration. For example, when a string is driven by a source, it represents
the ratio of the force per unit length applied by the source to the tension
in the string (see Equation 1.39). For harmonic sources, in particular, the
equation becomes:
∇2 ψ −
1 ∂ 2ψ
= −f (r)e−iωt
(6.8)
2
2
v ∂t
The first step in solving it, as in Section 2.2 for the sourceless wave equation,
is to remove the time dependence by assuming a separable solution of the
form:
∇2 ψ −
ψ(r, t) = ψω (r)e−iωt
Plugging it in yields the Helmholtz equation with a source term:
(6.9)
6.2. INHOMOGENEOUS WAVE EQUATION METHOD
∇2 ψω (r) + k 2 ψω (r) = −f (r)
141
(6.10)
The approach typically used to solve this equation is to first find the solution
for a point source with unit amplitude positioned arbitrarily at r 0 . The source
term becomes f (r) = δ(r − r 0 ) and the radiated wave function ψω (r) =
Gk (r, r 0 ) is called a Green’s function. Once the Green’s function is known,
it can be used to find the wave function for an arbitrary source term by
integrating it with the Helmholtz equation for the point source:
Z
0
0
0
Z
f (r )[∇ Gk (r, r ) + k Gk (r, r )]dr = −f (r 0 )δ(r − r 0 )dr 0
Z
Z
2
0
0
0
2
0
0
0
∇
f (r )Gk (r, r )dr + k
f (r )Gk (r, r )dr = −f (r)
2
2
0
where this is just the Helmholtz equation for the arbitrary source with the
solution:
Z
ψω (r) = f (r 0 )Gk (r, r 0 )dr 0
(6.11)
The Helmholtz equation has many Green’s functions, but the one that is
used for a particular source must satisfy the boundary conditions that are
relevant for that source. For example, if the source is located inside a cavity
or waveguide, the Green’s function must satisfy the boundary conditions for
the walls. Such Green’s functions can often be found or constructed, but the
scope of this book is limited to sources in what’s called free space where no
physical boundaries are present. The Green’s function in this case, which is
called the free space Green’s function, must approach zero as r approaches
infinity and is given by:
0
eik|r−r |
Gk (r , r) =
4π|r − r 0 |
0
(6.12)
Notice that this is simply the wave function for an isotropic, outgoing spherical wave centered at r 0 . Plugging it into Equation 6.11 yields:
Z
ψω (r) =
0
eik|r−r |
f (r )
dr 0
0
4π|r − r |
0
(6.13)
142
CHAPTER 6. RADIATION
which implies that any radiated wave can be viewed as a continuous collection
of interfering isotropic spherical waves whose amplitudes are determined by
the value of the source term.
For acoustics, the source term is given by:
∂
[ρq(r, t)]
(6.14)
∂t
where q(r, t) represents the volume flow density produced by the source,
and is the amount of fluid moved per unit time per unit volume by the
source at location r and time t. Given that the density of the fluid is ρ, the
product ρq(r, t) is simply the mass flow density produced by the source. For
a harmonic source:
f (r, t) =
∂
[ρq(r)e−iωt ] = −iωρq(r)e−iωt
∂t
such that the solution to the Helmholtz equation becomes:
Z
0
eik|r−r |
0
dr 0
pω (r) = −iωρ q(r )
0
4π|r − r |
The vector wave equation with a source term takes the form:
f (r, t) =
(6.15)
(6.16)
1 ∂ 2ψ
= −f (r, t)
(6.17)
v 2 ∂t2
which can be separated into three independent scalar wave equations corresponding to the rectangular coordinates. Each can be solved for a harmonic
source using the Green’s function approach, and the results recombined to
produce:
Z
0
eik|r−r |
0
ψω (r) = f (r )
dr 0
(6.18)
4π|r − r 0 |
For radiated electromagnetic waves, it is generally best to calculate the
wave functions for the electric and magnetic fields from the vector potential
because the results are guaranteed to be divergenceless. The source term for
the vector potential is given by:
∇2 ψ −
f (r, t) = µJ (r, t)
(6.19)
where J (r, t) is the current density (electric current per unit volume) produced by the source at location r and time t. For a harmonic source:
6.2. INHOMOGENEOUS WAVE EQUATION METHOD
f (r, t) = µJ (r)e−iωt
143
(6.20)
such that:
Z
Aω (r) = µ
0
eik|r−r |
dr 0
J (r )
4π|r − r 0 |
0
(6.21)
Once the integral is evaluated, the electric and magnetic fields can be calculated outside the source using the definition of the vector potential and
Ampere’s law:
B = ∇ × A and E =
6.2.1
iv 2
∇×B
ω
Radiation by Point Sources
Equations 6.13 and 6.18 are called radiation integrals and can be evaluated or
approximated for many different sources. The solutions for several significant
combinations of point sources will be explored first.
Monopoles
A monopole is a single, harmonic point source with amplitude F̃ (or F̃ for a
vector source) called the monopole strength. Its source term is therefore:
f (r) = F̃ δ(r − r0 )
(6.22)
which returns the free space Green’s function when inserted into the radiation
integral:
F̃ eik|r−r0 |
ψω (r) =
4π |r − r0 |
F̃ ei(k|r−r0 |−ωt)
ψ(r, t) =
4π |r − r0 |
For a monopole situated at the origin, the wave function becomes:
(6.23)
(6.24)
144
CHAPTER 6. RADIATION
F̃ eikr
4π r
F̃ ei(kr−ωt)
ψ(r, t) =
4π
r
ψω (r) =
(6.25)
(6.26)
Dipoles
A dipole is defined as a pair of interfering monopoles that oscillate 180 degrees
out of phase. Its wave function is therefore the sum of two monopole wave
functions:
F̃ ei(k|r−r2 |−ωt−π)
F̃ ei(k|r−r1 |−ωt)
+
4π |r − r1 |
4π
|r − r2 |
F̃ ei(k|r−r1 |−ωt)
F̃ ei(k|r−r2 |−ωt)
=
−
4π |r − r1 |
4π |r − r2 |
ψ(r, t) =
Centering the dipole on the origin as illustrated in Figure 6.3, the far-field
approximation can be applied as in Section 3.2 when r d, λ. Using a
distance vector d that points from the bottom monopole to the top monopole,
the distances in the complex exponentials become:
|r − r1 | ≈ r − r̂ · r1 = r − r̂ · d/2
|r − r2 | ≈ r − r̂ · r2 = r − r̂ · −d/2
and the amplitudes are replaced by the amplitude for a monopole centered
on the origin such that:
F̃ i(kr−kr̂·d/2−ωt)
F̃ i(kr+kr̂·d/2−ωt)
e
−
e
4πr
4πr
F̃ ikr̂·d/2
≈−
(e
− e−ikr̂·d/2 )ei(kr−ωt)
4πr
ψ(r, t) ≈
Using Euler’s identity to simplify the term in parentheses:
ψ(r, t) ≈ −
F̃
2i sin(kr̂ · d/2)ei(kr−ωt)
4πr
(6.27)
6.2. INHOMOGENEOUS WAVE EQUATION METHOD
145
Figure 6.3: Geometry for a dipole source.
If the monopoles are close relative to the wavelength (kd 1), the argument
of the sine function is small and the small-angle approximation (sin α ≈ α)
can be applied:
ei(kr−ωt)
(6.28)
4πr
where the product (F̃ d) is called the dipole moment.
The vector d and associated dipole moment are not required to point
along the z-axis as illustrated in Figure 6.3, but considering that case as an
example:
ψ(r, t) ≈ −ikr̂ · (F̃ d)
r̂ · (F̃ d) = sin θ cos φx̂ + sin θ sin φŷ + cos θẑ · F̃ dẑ = F̃ d cos θ
and:
146
CHAPTER 6. RADIATION
ei(kr−ωt)
4πr
As discovered in Chapter 3, interfering spherical waves always produce a
spherical wave in the far-field with an angular-dependent amplitude term
determined by their phase differences. The normalized interference pattern,
which is simply the squared angular dependence of the amplitude (cos2 θ), is
plotted in Figure 6.4.
ψ(r, t) ≈ −ik(F̃ d) cos θ
1
z
0.5
0
−0.5
−1
−0.4
0.4
−0.2
0.2
0
0
0.2
−0.2
0.4
−0.4
y
x
Figure 6.4: Normalized interference pattern for a dipole in the far-field when
kd 1.
Quadrupoles
A quadrupole is a pair of interfering dipoles arranged either longitudinally or
laterally as illustrated in Figures 6.5 and 6.6. The quadrupole wave function
6.2. INHOMOGENEOUS WAVE EQUATION METHOD
147
is therefore the sum of two shifted dipole wave functions. Using the geometry
in the figures and Equation 6.28 for the dipole wave functions:
ψ(r, t) ≈
− r2 · (−F̃ d) ei(k|r−r2 |−ωt)
−ik r d
− r1 · (F̃ d) ei(k|r−r1 |−ωt) −ik r d
+
4π
|r − r1 |
4π
|r − r2 |
Figure 6.5: Geometry for a longitudinal quadrupole source.
where the moment for the second dipole includes a negative sign because
its orientation is reversed. For the longitudinal quadrupole, the far-field
distances in the complex exponentials are the same as for a dipole. Consequently:
148
CHAPTER 6. RADIATION
Figure 6.6: Geometry for a lateral quadrupole source.
ikr̂ · (F̃ d) ikr̂·d/2
(e
− e−ikr̂·d/2 )ei(kr−ωt)
4πr
2kr̂ · (F̃ d)
≈−
sin(kr̂ · d/2)ei(kr−ωt)
4πr
ψ(r, t) ≈
Because kd 1, this simplifies to:
ei(kr−ωt)
(6.29)
4πr
Using a second distance vector d⊥ that points from the middle of the second
dipole to the middle of the first in Figure 6.6, the far-field distances in the
complex exponentials for the lateral quadrupole become:
ψ(r, t) ≈ −k 2 (r̂ · d)2 F̃
6.2. INHOMOGENEOUS WAVE EQUATION METHOD
149
|r − r1 | ≈ r − r̂ · r1 = r − r̂ · d⊥ /2
|r − r2 | ≈ r − r̂ · r2 = r − r̂ · −d⊥ /2
such that:
ikr̂ · (F̃ d) ikr̂·d⊥ /2
(e
− e−ikr̂·d⊥ /2 )ei(kr−ωt)
4πr
2kr̂ · (F̃ d)
≈−
sin(kr̂ · d⊥ /2)ei(kr−ωt)
4πr
ψ(r, t) ≈
Because kd 1:
ei(kr−ωt)
(6.30)
4πr
The two distance vectors aren’t required to point along the z-axis and
x-axis as illustrated in Figures 6.5 and 6.6 as long as they are perpendicular,
but considering that case as an example:
ψ(r, t) ≈ −k 2 (r̂ · d)(r̂ · d⊥ )F̃
r̂ · d = d cos θ
r̂ · d⊥ = d sin θ cos φ
such that:
ψlong (r, t) ≈ −k 2 (F̃ d2 ) cos2 θ
ei(kr−ωt)
4πr
ψlat (r, t) ≈ −k 2 (F̃ d2 ) cos θ sin θ cos φ
ei(kr−ωt)
4πr
where (F̃ d2 ) is called the quadrupole moment. The normalized interference
patterns for both are plotted in Figure 6.7.
6.2.2
Radiation by Extended Sources
Direct evaluation of the radiation integrals for extended sources is difficult
in most cases. An alternative approach is to rewrite the free space Green’s
CHAPTER 6. RADIATION
1
1
0.5
0.5
0
0
z
z
150
−0.5
−0.5
−1
−0.5
−1
−1
0.5
0
0.5
0
x 0.5 −0.5
0
y
0
x
1
−0.5
y
Figure 6.7: Normalized interference patterns for quadrupoles in the far-field
when kd 1.
function within the integrals as a linear combination of the spherical solutions
to the wave function, although the result is often just as difficult to evaluate.
The scalar integral, for example, becomes:
ψω (r) = ik
X
(1)
hl (kr)Ylm (θ, φ)
Z
f (r 0 )jl (kr0 )Ylm∗ (θ0 , φ0 )dr 0
(6.31)
l,m
A simpler approach is to apply the far-field approximation to the free space
Green’s function instead, but the result is only valid at large distances relative
to the size of the source and the wavelength (r r0 , λ):
1
ψω (r) ≈
4πr
Z
0
f (r )e
ik(r−r̂·r 0 )
eikr
dr =
4πr
0
Z
0
f (r 0 )e−ik·r dr 0
(6.32)
6.2. INHOMOGENEOUS WAVE EQUATION METHOD
151
where:
k = kr̂ = k sin θ cos φx̂ + k sin θ sin φŷ + k cos θẑ
Because the radiation integral represents a continuous collection of interfering spherical waves, the result is also a spherical wave where the angular
dependence of the amplitude is determined by the integral over the source
term. This integral can generally be evaluated, and solutions will be derived
for several acoustic and electromagnetic examples.
Pulsating Sphere
Consider the pulsating sphere illustrated in Figure 6.1 with surface velocity
given by Equation 6.1. Because the sphere only moves fluid at its surface,
the volume flow density it creates is given by:
q(r, t) = q(θ, φ, t)δ(r − a)
where q(θ, φ, t) is the volume flow per unit area at the surface:
Radial Surface Velocity × Area
Volume Flow
=
= ũ0 e−iωt
Area
Area
Plugging this into the radiation integral for acoustic sources (Equation 6.16)
with the far-field approximation applied yields:
Z
eikr
0
δ(r0 − a)e−ik·r dr 0
pω (r) ≈ −iωρũ0
4πr
Because the pulsating sphere possesses spherical symmetry, k can be aligned
with the z 0 -axis without loss of generality such that k·r 0 = k ẑ 0 ·(r0 sin θ0 cos φ0
x̂0 + r0 sin θ0 sin φ0 ŷ 0 + r0 cos θ0 ẑ 0 ) = kr0 cos θ0 . Making this substitution:
q(θ, φ, t) =
Z Z Z
eikr 2π π ∞
0
0
δ(r0 − a)e−ikr cos θ (r02 sin θ0 )dr0 dθ0 dφ0
pω (r) ≈ −iωρũ0
4πr 0
0
0
ikr
−ika cos θ0 π
e
e
≈ −iωρũ0
(2πa2 )
4πr
ika
0
ika
−ika
eikr
e
−
e
≈ −iωρũ0
(2πa2 )
4πr
ika
ikr
e
sin ka
≈ −iωρũ0
(4πa2 )
4πr
ka
152
CHAPTER 6. RADIATION
For small spheres where ka 1, the small angle approximation can be
applied to the sine function producing:
eikr ka
r ka
ikr
e
≈ −iρvũ0 (ka2 )
r
pω (r) ≈ −iρ(vk)ũ0 a2
(6.33)
which is identical to the result obtained earlier using the boundary condition
method. Notice that the pulsating sphere is like a monopole in that the
amplitude of the spherical wave it produces has no angular dependence.
Baffled Piston
A baffled piston is a flat, vibrating surface surrounded by a barrier that contains the fluid medium to the front side as illustrated in Figure 6.8. Because
the radiation is emitted into half the space, the source term is doubled. The
volume flow density is therefore:
q(r, t) = 2q(x, y, t)δ(z)
where:
q(x, y, t) =
Surface Velocity × Area
Volume Flow
=
= ũ0 e−iωt
Area
Area
Inserting this into the radiation integral:
ZZ
Z ∞
eikr
0
0
0
δ(z 0 )e−i(kx x +ky y +kz z ) dz 0 dx0 dy 0
pω (r) ≈ −iωρũ0
2πr
Piston Surface −∞
ZZ
0
0
≈ ψsph
e−i(kx x +ky y ) dx0 dy 0
(6.34)
Piston
Surface
ZZ
0
0
≈ ψsph
e−i(k sin θ cos φx +k sin θ sin φy ) dx0 dy 0
Piston Surface
Notice that the integral is simply the two-dimensional Fourier transform of
the piston surface and can often be evaluated. Several examples involving
different piston shapes will be addressed in the next chapter.
6.2. INHOMOGENEOUS WAVE EQUATION METHOD
153
Figure 6.8: A baffled, circular piston.
Vibrating Sphere
Consider the vibrating sphere in Figure 6.2 next with surface velocity given
by Equation 6.4. The volume flow density it creates is given by:
q(r, t) = δ(r − a)ũ0 cos θe−iωt
Plugging this into the radiation integral yields:
Z
eikr
0
pω (r) ≈ −iωρũ0
δ(r0 − a) cos θ0 e−ik·r dr 0
4πr
Because the vibrating sphere possesses azimuthal symmetry, k can be placed
in the x0 z 0 -plane without loss of generality such that k · r 0 = (k sin θx̂0 +
k cos θẑ 0 ) · (r0 sin θ0 cos φ0 x̂0 + r0 sin θ0 sin φ0 ŷ 0 + r0 cos θ0 ẑ 0 ) = (k sin θ)(r0 sin θ0
cos φ0 ) + (k cos θ)(r0 cos θ0 ). Making this substitution:
154
CHAPTER 6. RADIATION
eikr
pω (r) ≈ −iωρũ0
4πr
Z
2π
Z
π
Z
∞
δ(r0 − a) cos θ0
0
0
0
−i(kr0 sin θ sin θ0 cos φ0 +kr0 cos θ cos θ0 ) 02
e
ikr Z
e
≈ −iωρũ0
4πr
e
r sin θ0 dr0 dθ0 dφ0
2π
Z
π
cos θ0
0
0
−i(ka sin θ sin θ0 cos φ0 +ka cos θ cos θ0 ) 2
a sin θ0 dθ0 dφ0
For small spheres where ka 1, the exponential can be replaced with the
first two terms of its Taylor expansion (ex ≈ 1 + x) to simplify the integral:
eikr
pω (r) ≈ −iωρũ0
4πr
Z
2π
Z
0
π
[a2 cos θ0 sin θ0 − ika3 sin θ sin2 θ0 cos θ0 cos φ0
0
− ika3 cos θ cos2 θ0 sin θ0 ]dθ0 dφ0
The first and second terms both integrate to zero. The third yields:
eikr
[−ika3 cos θ(2π)(−1/3 cos3 θ0 )|π0 ]
4πr
eikr
1
≈ − (vk)ρũ0 ka3 cos θ(4π)
3
4πr
ikr
1
e
≈ − ρvũ0 (ka)3 cos θ
3
kr
pω (r) ≈ −iωρũ0
(6.35)
which nearly matches the result obtained earlier using the boundary condition method. Notice that the angular dependence of the amplitude in this
case is identical to that for a dipole aligned with the z-axis.
Linear Electromagnetic Antenna
For a linear electromagnetic antenna of length d placed in a coordinate system
where it is centered on the origin and oriented along the z-axis, the current
density is given by:
J (r, t) = δ(x)δ(y)I˜0 e−iωt ẑ
for − d/2 ≤ z ≤ d/2
(6.36)
6.2. INHOMOGENEOUS WAVE EQUATION METHOD
155
where the current carried by the antenna is assumed to vary harmonically
with amplitude I˜0 . Inserting this expression into the radiation integral for
electromagnetic sources (Equation 6.21) with the far-field approximation applied yields:
ikr Z
e
0
Aω (r) ≈ ẑµI˜0
δ(x)δ(y)e−ik·r dr 0
4πr
Z
eikr d/2 −i(k cos θ)z0 0
˜
≈ ẑµI0
e
dz
4πr −d/2
0
eikr e−ikz cos θ d/2
4πr −ik cos θ −d/2
eikr −2i sin(kd/2 cos θ)
˜
≈ ẑµI0
4πr
−ik cos θ
ikr
e
sin(kd/2
cos θ)
≈ ẑµI˜0
2
4πr
k cos θ
For a short antenna where kd 1, the small angle approximation can be
applied to the sine function such that:
≈ ẑµI˜0
ikr
kd/2 cos θ
e
2
Aω (r) ≈ ẑµI˜0
4πr k cos θ
eikr
µ
(6.37)
≈ ẑ I˜0 d
4π
r
The far-field spherical wave produced by any antenna can be written in
the form:
eikr
Ã(θ, φ)
r
Using the vector identity ∇ × (ba) = ∇b × a + b∇ × a:
Aω (r) ≈
eikr
eikr
× Ã(θ, φ) +
∇ × Ã(θ, φ)
r
r
∂ eikr
eikr
=
r̂ × Ã(θ, φ) +
∇ × Ã(θ, φ)
∂r
r
r
ikr
e
eikr
eikr
= ik
− 2 r̂ × Ã(θ, φ) +
∇ × Ã(θ, φ)
r
r
r
Bω = ∇ × A ω = ∇
156
CHAPTER 6. RADIATION
In the far-field, any term of order 1/r2 can be ignored. The curl yields a 1/r
term, so only the first term remains:
eikr
r̂ × Ã(θ, φ)
r
eikr
≈ ikr̂ ×
Ã(θ, φ)
r
≈ ikr̂ × Aω (r)
Bω ≈ ik
(6.38)
Inserting the vector potential for the linear antenna yields:
µ
eikr
µ ˜ eikr
φ̂
(6.39)
I0 d
= −i (I˜0 kd) sin θ
4π
r
4π
r
Because the wave is spherical, the corresponding electric field is perpendicular
with magnitude Eω = vBω :
Bω ≈ ikr̂ × ẑ
Eω ≈ −i
µ ˜
eikr
θ̂
v(I0 kd) sin θ
4π
r
(6.40)
Multipole Expansion
In evaluating the radiation integral for a vibrating sphere, the complex exponential was expanded to make integration possible. The same can be done
for any source. Inserting the Taylor expansion:
∞
X
1 n
x
e =
n!
n=0
x
into the radiation integral with the far-field approximation applied (Equation
6.32) yields:
∞
eikr X 1
ψω (r) ≈
4πr n=0 n!
Z
f (r 0 )(−ik · r 0 )n dr 0
(6.41)
where f is simply replaced by f for a vector wave. Although the sum is
infinite, the higher order terms quickly become negligible as long as the
source is small relative to the wavelength (k · r 0 1).
The first term in the expansion:
6.2. INHOMOGENEOUS WAVE EQUATION METHOD
157
Z
eikr
ψω0 (r) =
f (r 0 )dr 0
4πr
is the wave function for a monopole centered on the origin with monopole
strength:
Z
F̃ = f (r 0 )dr 0
The second term:
eikr
ψω1 (r) =
4πr
Z
eikr
f (r )(−ik · r )dr =
(−ik)r̂ ·
4πr
0
0
0
Z
f (r 0 )r 0 dr 0
is the wave function for a dipole with dipole moment:
Z
(F̃ d) = f (r 0 )r 0 dr 0
The third term is a sum of lateral and longitudinal quadrupole wave functions, the fourth term a sum of octopole fields, and so on. Equation 6.41 is
therefore referred to as the multipole expansion of the source wave function.
Notice that in the far-field where kr 1, the spherical wave function
approximation for the spherical Hankel functions introduced in Subsection
2.2.2:
(−i)l+1 ikr
e for kr 1
kr
can be substituted into Equation 6.31:
(1)
hl (kr) ≈
Z
eikr X
l+1 m
ψω (r) = i
(−i) Yl (θ, φ) f (r 0 )jl (kr0 )Ylm∗ (θ0 , φ0 )dr 0
r l,m
(6.42)
producing a result that is very similar to the multipole expansion. In fact,
the angular dependence of the Spherical Harmonics and multipole terms is
nearly identical for l = n, with minor differences due to inaccuracies in the
multipole expansion associated with the far-field approximation. For this
reason, the terms in an expansion like the one above are often referred to by
their multipole equivalents, i.e. the l = 0 term is called a monopole term, the
l = 1 term a dipole term, the l = 2 term a quadropole term, etc.
158
CHAPTER 6. RADIATION
Chapter 7
Diffraction
Chapter 4 addressed the interaction of plane waves with large, flat boundaries. This chapter describes their behavior when they encounter partial
boundaries. In particular, it explores the phenomenon known as diffraction,
which is the apparent bending of a wave when it passes around an edge of or
through an aperture in an otherwise impenetrable boundary (see Figure 7.1).
It begins by outlining the calculation of diffracted wave functions, and then
applies the method to rectangular apertures, circular apertures, and arrays
of apertures.
7.1
Kirchoff Diffraction Theory
In general, diffracted wave functions cannot be found by applying boundary
conditions to the separable solutions of the wave equation at partial boundaries. Instead, they are calculated using Green’s theorem, which asserts that
for any region of space with volume V 0 and surface S 0 , and any two wellbehaved functions ψ1 and ψ2 :
I
0
0
0
I
(ψ1 ∇ ψ2 − ψ2 ∇ ψ1 ) · dS =
S0
(ψ1 ∇02 ψ2 − ψ2 ∇02 ψ1 )dV 0
(7.1)
V0
Letting ψ2 be a solution to the scalar Helmholtz equation (ψω (r 0 )) and ψ1
be a scalar Green’s function (Gk (r, r 0 )):
159
160
CHAPTER 7. DIFFRACTION
Figure 7.1: Diffraction of plane wave through an aperture in two dimensions.
I
[Gk (r, r 0 )∇0 ψω (r 0 ) − ψω (r 0 )∇0 Gk (r, r 0 )] · dS 0
S0
I
=
{Gk (r, r 0 )[−k 2 ψω (r 0 )] − ψω (r 0 )[−δ(r − r 0 ) − k 2 Gk (r, r 0 )]}dV 0
0
IV
=
ψω (r 0 )δ(r − r 0 )dV 0
V0
= ψω (r)
Switching the order of the terms yields:
I
ψω (r) =
[Gk (r, r 0 )∇0 ψω (r 0 ) − ψω (r 0 )∇0 Gk (r, r 0 )] · dS 0
S0
7.1. KIRCHOFF DIFFRACTION THEORY
161
which indicates that the scalar wave function within any region of space
can be found by performing an integral over the surface of that region. To
find the wave function transmitted through/around a partial boundary, the
surface of the region is chosen to conform to the back side of the boundary on
one side and expand toward infinity on the other as illustrated in Figure 7.2.
The free space Green’s function is typically chosen to evaluate the surface
integral because it and its gradient approach zero for large values of r 0 and
therefore nullify the integral on the infinite side leaving:
Figure 7.2: Geometry used for diffraction problems.
1
ψω (r) =
4π
Z
bdry
0
ik|r−r 0 |
eik|r−r | 0
0
0
0e
∇ ψω (r ) − ψω (r )∇
· dS 0
|r − r 0 |
|r − r 0 |
which is called the Kirchoff integral theorem.
(7.2)
162
CHAPTER 7. DIFFRACTION
Notice that an exact solution to the integral requires knowledge of the
diffracted wave function on the boundary (ψω (r 0 )), which is generally unavailable. The Kirchoff approximation is therefore applied, which asserts
that the diffracted wave function and its gradient are approximately zero on
the back side of an impenetrable partial boundary, and that it is approxi0
mately equal to the wave function for the incident plane wave (Ãeiki ·r ) at
an edge or aperture. Making these substitutions yields:
1
ψω (r) ≈
4π
Z
edge/ap
0 0
eik|r−r | 0 iki ·r0 iki ·r0 0 eik|r−r |
∇ Ãe
− Ãe
∇
· dS 0
|r − r 0 |
|r − r 0 |
which is valid as long as the distance between r and the edge/aperture is
large relative to the wavelength. The gradient of the incident wave function
is:
0
0
∇0 Ãeiki ·r = iki Ãeiki ·r
while the gradient of the Green’s function is a straightforward extension of
the gradient for an isotropic spherical wave centered on the origin:
ikr0
0e
∇ 0
r
0
1 eikr 0
= ik − 0
r̂
r
r0
⇓
ik|r0 −r|
0
0
ik|r −r|
ik|r−r |
1
e
0e
0e
=∇ 0
= ik − 0
r 0d
−r
∇
0
|r − r |
|r − r|
|r − r| |r 0 − r|
ik|r−r0 |
1
e
= ik −
r 0d
−r
0
|r − r | |r − r 0 |
Because |r − r 0 | λ for the Kirchoff approximation to be valid, the second
term in the parentheses is much smaller than the first and can be ignored.
Inserting these results into the Kirchoff integral yields:
1
ψω (r) ≈
4π
Z 0
0
eik|r−r |
eik|r−r | 0d
iki ·r 0
iki ·r 0
(iki )Ãe
− Ãe
(ik)
r − r · dS 0
|r − r 0 |
|r − r 0 |
Substituting ki · dS 0 = −k cos θi dS 0 and r 0d
− r · dS 0 = cos θdS 0 from Figure
7.2:
7.1. KIRCHOFF DIFFRACTION THEORY
−iÃ
ψω (r) ≈
λ
Z
edge/ap
cos θi + cos θ
2
163
0
eiki ·r
0
eik|r−r | 0
dS
|r − r 0 |
(7.3)
Like the radiation integrals from Chapter 6, this integral represents a sum of
outgoing spherical wave functions. Consequently, any diffracted wave can be
viewed as a series of interfering spherical waves spanning the edge/apertures
of the boundary whose amplitudes and phase angles are determined by the
incident plane wave.
Because the rectangular components of a diffracted vector wave separately
satisfy the scalar wave equation, each can be found using the Kirchoff integral
and then recombined. With the Kirchoff approximation applied, the result
is identical to the scalar Kirchoff integral with the amplitude of the incident
plane wave replaced by its vector equivalent:
Z
0
cos θi + cos θ iki ·r0 eik|r−r | 0
−iÃ
e
dS
(7.4)
ψω (r) ≈
λ
2
|r − r 0 |
edge/ap
The Kirchoff integral can be difficult to solve analytically, so additional
approximations are usually required. If r is large relative to r0 over the range
of the integral, the far-field approximation can be applied:
−iÃ
ψω (r) ≈
λ
−iÃ
ψω (r) ≈
λ
cos θi + cos θ
2
cos θi + cos θ
2
1
r
Z
0
0
eiki ·r eik(r−r̂·r ) dS 0
edge/ap
ikr
e
r
Z
0
e−i(k−ki )·r dS 0
(7.5)
edge/ap
where θ is now fixed at the origin, i.e. the angle of r. For vector waves:
Z
−ià cos θi + cos θ eikr
0
ψω (r) ≈
e−i(k−ki )·r dS 0
(7.6)
λ
2
r edge/ap
Because the Kirchoff integral represents a continuous series of interfering
spherical waves, the result is also a spherical wave. The remaining surface
integral affects the angular dependence of the amplitude, and will be evaluated for several apertures in the examples that follow assuming a normally
incident plane wave where cos θi = 1 and ki · r 0 = 0. With the coordinate
system oriented such that the apertures lie in the xy-plane as illustrated in
Figure 7.3 for a rectangular aperture, the Kirchoff integral becomes:
164
CHAPTER 7. DIFFRACTION
Figure 7.3: Geometry used to calculate the diffracted wave for a rectangular
aperture.
Z
−ià 1 + cos θ eikr
0
e−ik·r dS 0
ψω (r) ≈
λ
2
r ap
ZZ
0
0
≈ ψsph
e−i(kx x +ky y ) dx0 dy 0 = ψsph S(θ, φ)
(7.7)
ap
or for vector waves:
−iÃ
ψω (r) ≈
λ
1 + cos θ
2
eikr
r
ZZ
0
0
e−i(kx x +ky y ) dx0 dy 0 = ψsph S(θ, φ) (7.8)
ap
where kx = kr̂x = k sin θ cos φ and ky = kr̂y = k sin θ sin φ in terms of
spherical coordinates. Notice that the surface integral S(θ, φ) is essentially
7.2. RECTANGULAR APERTURE
165
the two-dimensional Fourier transform of the aperture, but can also be interpreted as a phasor sum for the interfering spherical waves spanning the
aperture. It is also identical to the integral required for a baffled piston
(Equation 6.34), so the results in the examples that follow apply equally to
the radiation produced by baffled pistons with the same shapes.
If, as usual, the intensity of the diffracted spherical wave is proportional
to its squared amplitude, then:
I = S 2 (θ, φ)Isph
(7.9)
where Isph is the intensity for ψsph or ψsph . S 2 (θ, φ) is the interference pattern
produced by the spherical waves spanning the aperture, and is referred to as
the diffraction pattern.
7.2
Rectangular Aperture
The surface integral for the rectangular aperture in Figure 7.3 is given by:
Z
b/2
Z
a/2
S(θ, φ) =
e
−b/2
−i(kx x0 +ky y 0 )
0
Z
0
b/2
dx dy =
−iky y 0
e
−a/2
dy
−b/2
0
Z
a/2
0
e−ikx x dx0
−a/2
Evaluating the second integral yields:
Z
a/2
−ikx x0
e
Z
0
a/2
0
Z
a/2
sin kx x0 dx0
cos kx x dx − i
dx =
−a/2
0
−a/2
x0 a/2
sin kx
+i
kx
−a/2
sin(kx a/2)
=a
(kx a/2)
=
−a/2
cos kx x0 a/2
kx
−a/2
The first integral is identical so the full result becomes:
S(θ, φ) = ab
sin(kx a/2) sin(ky b/2)
(kx a/2) (ky b/2)
An example of the corresponding diffraction pattern:
(7.10)
166
CHAPTER 7. DIFFRACTION
S 2 (θ, φ) = (ab)2
sin2 (kx a/2) sin2 (ky b/2)
(kx a/2)2 (ky b/2)2
(7.11)
is illustrated in Figure 7.4.
1
0.8
0.6
20
0.4
10
0.2
0
0
−20
−10
−10
0
10
20
ky (1/m)
−20
kx (1/m)
Figure 7.4: Normalized diffraction pattern for a rectangular aperture with
a = 1.5 and b = 1 meters.
Consider a cross section of the surface integral/phasor sum along the
xz-plane where kx = k sin θ and ky = 0 such that:
Z
b/2
Z
a/2
S(θ, 0) =
e
−b/2
and:
−a/2
−ik sin θx0
dx0 dy 0 = ab
sin
ka
sin θ
2
ka
sin θ
2
7.2. RECTANGULAR APERTURE
167
2 sin
2
S (θ, 0) = (ab)
2
ka
2
sin θ
2
ka
sin θ
2
(7.12)
which is plotted in Figure 7.5. The complex exponential in the sum indicates
that the phasor angle for a spherical wave located at x0 on the aperture
surface is k sin θx0 . The total phase difference between the spherical waves
on one side of the aperture and those on the other is therefore given by:
α = k(a/2) sin θ − k(−a/2) sin θ = ka sin θ
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
−10
−8
−6
−4
−2
0
2
4
6
8
10
(ka/2) sin θ
Figure 7.5: Normalized diffraction pattern for a rectangular aperture in the
xz-plane.
Figure 7.6 illustrates the continuous phasor sum for several different values
of α. The waves are in phase and the interference is constructive when all
168
CHAPTER 7. DIFFRACTION
of the phasors align, which only occurs when α = 0 at θ = 0 and corresponds to the primary maximum in Figure 7.5. The value of the surface
integral/phasor sum at this angle is equal to the area of the aperture (ab),
which is unsurprising given that the number of interfering spherical waves
spanning its surface is determined by its size. The interference is destructive
whenever the tip of the last phasor meets the tail of the first such that the
sum is zero, and occurs at angles for which α is an integer multiple of 2π:
α = ka sin θ = 2πm
ka sin θ = 2πm
λ
sin θ = m
a
(7.13)
Figure 7.6: Phasor sum for a rectangular aperture at several angles.
7.3. CIRCULAR APERTURE
169
These angles correspond to the nodes in Figure 7.5. Almost half way between
the nodes are secondary maxima, the heights of which become progressively
smaller as the phasor sum wraps upon itself.
The angular widths of the primary and secondary maxima are determined by the locations of the nodes on either side and can be calculated by
differentiating Equation 7.13:
dm
a
= cos θ
dθ
λ
λ 1
∆θ =
∆m
a cos θ
Plugging in θ = 0 and ∆m = 1 − (−1) = 2 for the primary maximum yields:
2λ
(7.14)
a
which indicates that its width, as well as that of the entire diffraction pattern,
is proportional to the wavelength and inversely proportional to the size of
the aperture.
∆θprimary maximum =
7.3
Circular Aperture
Many acoustic and optical instruments make use of circular apertures/pistons
like the one illustrated in Figure 7.7. Switching from rectangular to cylindrical coordinates due to the circular symmetry of the aperture, the surface
integral becomes:
ZZ
−i(kx x0 +ky y 0 )
S(θ, φ) =
e
0
0
Z
2π
Z
dx dy =
ap
0
a
e−i(kx r
0
cos φ0 +ky r0 sin φ0 ) 0
r dr0 dφ0
0
Because the problem possesses azimuthal symmetry, the result must be independent of the azimuthal angle φ. Consequently, the integral can be evaluated for a single value of φ and applied to all other values. Choosing φ = 0,
which corresponds to the xz-plane, kx = k sin θ and ky = 0 such that:
Z 2π Z a
0
0
S(θ) =
e−ik sin θr cos φ r0 dr0 dφ0
0
0
170
CHAPTER 7. DIFFRACTION
Figure 7.7: Geometry used to calculate the diffracted wave for a circular
aperture.
where the solution can be obtained from a table of integrals:
S(θ) = πa2
2J1 (ka sin θ)
(ka sin θ)
(7.15)
The diffraction pattern for the circular aperture:
S 2 (θ) = (πa2 )2
4J12 (ka sin θ)
(ka sin θ)2
(7.16)
is plotted in Figure 7.8. Notice the similarity with the pattern for a rectangular aperture. Both have a primary maximum equal to the squared aperture
area located along the central axis. Both also possess diminishing secondary
maxima located between a series of nodes. The locations of the nodes for the
7.3. CIRCULAR APERTURE
171
circular aperture are specified by the roots of the Bessel function:
ka sin θ = U1l
λ
sin θ = U1l
2πa
(7.17)
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
−10
−8
−6
−4
−2
0
2
4
6
8
10
ka sin θ
Figure 7.8: Normalized diffraction pattern for a circular aperture.
and can be used to determine the angular widths of the maxima. For the
primary maximum in particular:
∆θprimary maximum = 2θfirst node ≈ 2 sin θfirst node
λ
λ
λ
λ
≈ U11
≈ (1.22π)
= 1.22 = 2.44
πa
πa
a
D
(7.18)
172
CHAPTER 7. DIFFRACTION
where D is the diameter of the aperture. The result is slightly larger than
for a rectangular aperture of comparable size, but the dependencies upon
wavelength and aperture size are identical.
7.4
Multiple Apertures
Double apertures are identical apertures placed sided by side as illustrated
in Figure 7.9 for two rectangular apertures. Because the diffracted wave for
an individual aperture is a spherical wave in the far-field, a double aperture
simply produces two interfering spherical waves. From Section 3.2, the wave
function for two interfering spherical waves oriented along the z-axis is:
ψ = 2 cos[k(d/2) cos θ]ψsph = 2 cos(kz d/2)ψsph
If the double aperture is aligned with the x-axis as in Figure 7.9, kz simply
becomes kx . Making this substitution and inserting the expression for the
spherical wave produced by a single aperture:
ψ = 2 cos(kx d/2)S(θ, φ)single ψsph
The diffraction pattern for the double aperture is therefore:
S 2 (θ, φ)double = 4 cos2 (kx d/2)S 2 (θ, φ)single
(7.19)
which is simply the product of the interference pattern for two spherical waves
and the diffraction pattern for a single aperture. For the double rectangular
aperture in particular:
2
S (θ, φ)double = 4 cos
2
2
2
2 sin (kx a/2) sin (ky b/2)
(kx d/2)(ab)
(kx a/2)2 (ky b/2)2
(7.20)
Consider a cross section of the pattern along the xz-plane where kx =
k sin θ and ky = 0:
2 ka
sin θ
2
2
2 sin
2
S (θ, 0)double = 4 cos (kd/2 sin θ)(ab)
(7.21)
2
ka
sin
θ
2
which is plotted in Figure 7.10 for d/a = 4. Because the aperture spacing is
larger than the aperture size, the single-aperture diffraction pattern is wider
than the interference pattern and forms an envelope around it.
7.4. MULTIPLE APERTURES
173
Figure 7.9: Geometry used to calculate the diffracted wave for a double
rectangular aperture.
Extending the results for a double aperture to a linear array of apertures,
the diffraction pattern for the array must be the product of the diffraction
pattern for a single aperture and the interference pattern for a linear array of
spherical waves. The interference pattern from Section 3.3 for a linear array
oriented along the z-axis is given by:
N
2
sin [N (k/2)d cos θ]
N sin [(k/2)d cos θ]
2
=N
2
sin (N kz d/2)
N sin (kz d/2)
2
so the diffraction pattern for an array of apertures aligned with the x-axis is:
2
S (θ, φ)linarray = N
2
sin (N kx d/2)
N sin (kx d/2)
2
S 2 (θ, φ)single
(7.22)
174
CHAPTER 7. DIFFRACTION
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
−10
−8
−6
−4
−2
0
2
4
6
8
10
(ka/2) sin θ
Figure 7.10: Normalized diffraction pattern for a double rectangular aperture
in the xz-plane where d/a = 4. The dotted line is the normalized diffraction
pattern for a single aperture.
For an array of rectangular apertures in particular, the diffraction pattern in
the xz-plane is:
S 2 (θ, 0)linarray = N 2
sin [N (k/2)d sin θ]
N sin [(k/2)d sin θ]
2
sin2
(ab)2
ka
2
sin θ
2
ka
sin
θ
2
(7.23)
which is plotted in Figure 7.11 for d/a = 4 and N = 4. Again, the singleaperture diffraction pattern forms an envelope around the interference pattern.
A two-dimensional array is essentially a linear array of spherical waves
along the y-axis produced by a series of linear arrays aligned with the x-
7.4. MULTIPLE APERTURES
175
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
−6
−4
−2
0
2
4
6
(ka/2) sin θ
Figure 7.11: Normalized diffraction pattern for a linear array of rectangular
apertures in the xz-plane where d/a = 4 and N = 4. The dotted line is the
normalized diffraction pattern for a single aperture.
axis. Consequently, the diffraction pattern is the product of the interference
pattern for a linear array along the y-axis with the diffraction pattern for a
linear array aligned with the x-axis:
2
S (θ, φ)array =
Ny2
sin (Ny ky dy /2)
Ny sin (ky dy /2)
2
Nx2
sin (Nx kx dx /2)
Nx sin (kx dx /2)
2
S 2 (θ, φ)single
(7.24)
where Nx and Ny are the number of apertures in the x and y-directions
respectively, and dx and dy are the spacings between them.
176
CHAPTER 7. DIFFRACTION
Chapter 8
Scattering
Earlier chapters have explored the interaction of plane waves with boundaries that are large and flat relative to the wavelength. This final chapter
addresses scattering, which is the reflection, transmission and diffraction of
incident waves by the surfaces of small objects. It begins by introducing
the terminology used to describe scattering, and then explores the methods used to calculate scattered wave functions, including an exact method
that involves applying boundary conditions at the scatterer surface, and two
approximate methods. One treats the scatterer as a localized variation in
medium properties, while the other applies the Kirchoff integral to the scatterer surface.
8.1
Scattering Terminology
Figure 8.1 shows a conceptual diagram of an incident plane wave scattered
by a small object. Notice that the scattered wave is a spherical wave at large
distances, just as radiated and diffracted waves are spherical in the far-field.
Consequently, the scattered wave function takes the following form in the
far-field:
ψs = Ãs (θ, φ, ω)
ei(kr−ωt)
r
or ψs = Ãs (θ, φ, ω)
ei(kr−ωt)
r
(8.1)
where there is an implicit dependence of the amplitudes upon the orientation of the scatterer relative to the incident plane wave, and of the vector
amplitude upon the polarization of the incident plane wave.
177
178
CHAPTER 8. SCATTERING
Figure 8.1: Scattering of a plane wave by a small object.
The amplitude of the scattered wave is dependent upon the properties
and shape of the scatterer, but is also proportional to the amplitude of the
incident plane wave Ai , e.g. doubling the incident amplitude doubles the
scattered amplitude. Dividing it out removes this dependence and leaves a
quantity that is solely dependent upon the object and can therefore be used
to characterize the scattering it produces:
L̃(θ, φ, ω) =
Ãs (θ, φ, ω)
Ai
or L̃(θ, φ, ω) =
Ãs (θ, φ, ω)
|Ai |
(8.2)
This normalized scattering amplitude is referred to as the scattering length
simply because it possesses units of length.
Once the scattering length of an object is known, it can be multiplied
by the amplitude of any incident plane wave to determine the amplitude of
8.1. SCATTERING TERMINOLOGY
179
the resulting scattered wave. In most situations, however, it is the scattered
power that is of interest rather than the scattered amplitude. Naively, the
total scattered power would be equal to the product of the incoming plane
wave’s intensity and the amount of its area that contacts the scatterer. From
Figure 8.1, it is clear that this quantity is the physical cross section of the
scatterer σp so:
Ps = Ii σp
(8.3)
Of course this simple model fails to account for diffraction of the incident
plane wave around the edges of the scatterer and transmission of the wave
through its surface. Consequently, the scattered power must determined from
the scattering length.
The first step in the process is to relate the scattering length to the
scattered intensity. Because the scattered wave is spherical, its intensity is
given by:
Is = C
A2i |L̃(θ, φ, ω)|2
|Ãs (θ, φ, ω)|2
=
C
r2
r2
or Is = C
|Ai |2 |L̃(θ, φ, ω)|2
r2
where C is a constant of proportionality that depends on wave type. The
plane wave intensity and amplitude are related by the same constant (Ii =
CA2i ), so the equation can be rewritten:
Is =
Ii |L̃(θ, φ, ω)|2
r2
or Is =
Ii |L̃(θ, φ, ω)|2
r2
The scattered intensity can then be used to calculate the scattered power.
Because the total power transmitted by any three-dimensional wave is found
by integrating its intensity over a surface perpendicular to its propagation
direction, the total power for a scattered spherical wave is determined by
integrating its intensity over a spherical shell. Using a shell with radius r
and working in spherical coordinates:
180
CHAPTER 8. SCATTERING
2π
Z
Z
π
Is r2 sin θdθdφ
Ps =
0
Z
0
2π Z π
= Ii
I0
= Ii
|L̃(θ, φ, ω)|2 sin θdθdφ
0
|L̃(θ, φ, ω)|2 dΩ
where dΩ = sin θdθdφ is an increment of two-dimensional angle referred to
as solid angle.
Notice that the integral of the squared scattering length is related to the
incident intensity and scattered power in the same way as the physical cross
section of the scatterer. It is therefore referred to as the scattering cross
section of the scatterer and identified by the same variable:
Ps
σ(ω) =
=
Ii
I
I
2
|L̃(θ, φ, ω)| dΩ or σ(ω) =
|L̃(θ, φ, ω)|2 dΩ
(8.4)
The derivative:
dσ
(θ, φ, ω) = |L̃(θ, φ, ω)|2
dΩ
or
dσ
(θ, φ, ω) = |L̃(θ, φ, ω)|2
dΩ
(8.5)
is called the differential scattering cross section, and can be used to determine
the power scattered per unit solid angle in a particular direction specified by
θ and φ:
dP
d
dσ
(θ, φ, ω) =
(Is σ(ω)) = Is (θ, φ, ω)
(8.6)
dΩ
dΩ
dΩ
The value of the differential scattering cross section opposite the direction
of the incident plane wave is called the backscatter, and is of most practical
interest because the same device is often used to both generate the incident
wave and receive the scattered wave.
8.2
Boundary Condition Method
The scattering length for an object is determined theoretically by calculating
the amplitude of the scattered spherical wave for a given incident plane wave,
8.2. BOUNDARY CONDITION METHOD
181
and dividing the result by the amplitude of the incident plane wave. One
way of finding the scattered amplitude is to apply boundary conditions to the
incident, scattered and internal wave functions at the surface of the object.
The method is nearly identical to the process used in Chapter 4 to find
reflection and transmission coefficients for planar surfaces. Although exact,
like all methods that involve the application of boundary conditions, it is
limited to simple symmetrical shapes.
As an example, consider acoustic scattering from a fluid sphere as illustrated in Figure 8.2 where the wave speed and fluid density for the sphere
are vs and ρs respectively. Because the scatterer is spherical, boundary conditions are applied to the wave functions written in terms of the separable
wave equation solutions for spherical coordinates. The wave function for the
incident plane wave becomes:
Figure 8.2: Geometry used to calculate the scattering length for a fluid
sphere, where the plane wave in incident along the +z-axis.
182
CHAPTER 8. SCATTERING
pi (r, θ, φ, t) = Ai ei(−kz−ωt) = Ai
X
(−i)l (2l + 1)jl (kr)Pl0 (cos θ)e−iωt
(8.7)
l
The scattered pressure propagates outward and has no azimuthal dependence
due to the symmetry of the problem, so its wave function is given by:
ps (r, θ, φ, t) =
X
(1)
Ãl hl (kr)Pl0 (cos θ)e−iωt
l
The inside of the sphere is a cavity, so the internal wave function, which also
has no azimuthal dependence, is given by:
pt (r, θ, φ, t) =
X
B̃l jl (ks r)Pl0 (cos θ)e−iωt
l
The boundary conditions that are applied to the wave functions are identical to those used in Chapter 4 for a planar surface. The first is that the
pressures on the inside and outside of the sphere must be equal at the surface:
pi (a, θ, φ, t) + ps (a, θ, φ, t) = pt (a, θ, φ, t)
(1)
Ai (−i)l (2l + 1)jl (ka) + Ãl hl (ka) = B̃l jl (ks a)
Ai (−i)l (2l + 1)jl (ka) + Ãl [jl (ka) + inl (ka)] = B̃l jl (ks a)
The second is that the components of the particle velocity perpendicular to
the surface on the inside and outside of the sphere must be equal:
ur,i (a, θ, φ, t) + ur,s (a, θ, φ, t) = ur,t (a, θ, φ, t)
The pressures can be related to the radial components of particle velocity
using Euler’s equation written in terms of spherical components (Equation
5.25):
8.2. BOUNDARY CONDITION METHOD
183
∂ur
∂p
=−
∂t
∂r
∂p
−iωρur = −
∂r
i ∂p
ur = −
kvρ ∂r
i ∂p
ur = −
vρ ∂(kr)
ρ
Making this substitution into the boundary condition produces:
Ai
Ãl (1)0
B̃l 0
(−i)l (2l + 1)jl0 (ka) + hl (ka) =
j (ks a)
vρ
vρ
vs ρs l
Ãl
B̃l 0
Ai
(−i)l (2l + 1)jl0 (ka) + [jl0 (ka) + in0l (ka)] =
j (ks a)
vρ
vρ
vs ρs l
Using the two boundary condition equations to solve for the scattered
amplitude:
Ãl = −Ai
(−i)l (2l + 1)
1 + iCl
Cl =
vρjl0 (ks a)nl (ka) − vs ρs jl (ks a)n0l (ka)
vρjl0 (ks a)jl (ka) − vs ρs jl (ks a)jl0 (ka)
(8.8)
Substituting the far-field approximation for the spherical Hankel functions:
eikr
for kr 1
kr
into the wave function for the scattered pressure yields a spherical wave:
(1)
hl (kr) ≈ (−i)(l+1)
ps (r, θ, φ, t) =
ei(kr−ωt) X i (−1)l (2l + 1) 0
Ai
Pl (cos θ)
r
k
1 + iCl
l
(8.9)
Dividing its amplitude by the amplitude of the incident plane wave leaves
the scattering length for the sphere:
L̃(θ, φ, ω) =
X i (−1)l (2l + 1)
Pl0 (cos θ)
k
1 + iCl
l
(8.10)
184
CHAPTER 8. SCATTERING
For small spheres relative to the wavelength (ka 1), the spherical
Neumann function and its derivative in Cl are large and become larger for
higher values of l. Consequently, only the lower-order terms in the sum
contribute significantly to the scattering length. Keeping
p only the monopole
(l = 0) and dipole (l = 1) terms and substituting v = 1/κρ:
κs − κ 1 2 3 3ρs − 3ρ
1
− k a
cos θ (8.11)
L̃(θ, φ, ω) ≈ Lmonopole + Ldipole = k 2 a3
3
κ
3
2ρs + ρ
In Chapter 6, pulsating and vibrating spheres were associated with monopole
and dipole radiation respectively. In this case, unequal compressibilities give
rise to monopole scattering and unequal densities to dipole scattering, suggesting that the incident plane wave causes the scatterer to pulsate when
its compressibility is different from that of the surrounding medium and to
vibrate when its density is different from that of the surrounding medium.
Notice also that the scattering length is proportional to the squared frequency, implying that the cross sections are proportional to the fourth power
of the frequency. This small-scatterer behavior is called Rayleigh scattering
and is not specific to spheres or acoustic scattering.
For the extreme case of a rigid sphere, the boundary conditions applied
at its surface change. The component of particle velocity perpendicular to
its surface must be zero:
ur,i (a, θ, φ, t) + ur,s (a, θ, φ, t) = 0
Ai
Ãl (1)0
(−i)l (2l + 1)jl0 (ka) + hl (ka) = 0
vρ
vρ
Ai
Ãl
(−i)l (2l + 1)jl0 (ka) + [jl0 (ka) + in0l (ka)] = 0
vρ
vρ
l
0
(−i) (2l + 1)jl (ka)
(−i)l (2l + 1)
Ãl = −Ai 0
=
−A
i
jl (ka) + in0l (ka)
1 + in0l (ka)/jl0 (ka)
which implies that:
n0l (ka)
Rigid Sphere
(8.12)
jl0 (ka)
For the opposite case of a pressure release sphere, the pressure at its surface
must be zero:
Cl =
8.2. BOUNDARY CONDITION METHOD
185
pi (a, θ, φ, t) + ps (a, θ, φ, t) = 0
(1)
Ai (−i)l (2l + 1)jl (ka) + Ãl hl (ka) = 0
Ai (−i)l (2l + 1)jl (ka) + Ãl [jl (ka) + inl (ka)] = 0
(−i)l (2l + 1)
(−i)l (2l + 1)jl (ka)
= −Ai
Ãl = −Ai
jl (ka) + inl (ka)
1 + inl (ka)/jl (ka)
which means that:
Cl =
nl (ka)
jl (ka)
Pressure Release Sphere
(8.13)
Figure 8.3 shows the scattering length for rigid spheres of different sizes.
Notice that the monopole and dipole terms are dominant for the smaller
spheres, but that the higher-order terms become more significant as size
increases. For comparison, consider the scattering length for a sphere taking
only reflection of the incident plane wave into account. In that case, the
scattering cross section is equal to the physical cross section of the sphere:
I
dσ
2
sin θdθdφ
πa = σr =
dΩ r
Because spheres reflect waves isotropically, the differential scattering cross
section does not depend upon angle and can be removed from the integral
such that:
dσ
πa =
dΩ r
2
I
sin θdθdφ
dσ
4π
dΩ r
dσ
a2
=
dΩ r
4
a
L̃r =
2
πa2 =
For the larger spheres, the scattering length is nearly equal to this value in
the backward direction between 0 and 90 degrees. The lobes in the forward
direction destructively interfere with the incident plane wave to produce a
186
CHAPTER 8. SCATTERING
120
90 1
60
0.5
150
180
120
30
0
210
330
240
210
120
30
180
0
210
330
270
ka = 5
330
240
60
2
240
0
300
270
ka = 2
90 4
150
30
180
ka = 1
120
60
1
150
300
270
90 2
300
90 4
60
2
150
30
180
0
210
330
240
270
300
ka = 10
Figure 8.3: Normalized Scattering Length (|L̃|/(a/2)) for rigid spheres.
shadow with oscillating intensity caused by diffraction of the plane wave
around the edges of the sphere. In this particular case, there is no effect due
to transmission of the incident plane wave into/out of the sphere because
rigid boundaries are impenetrable.
Figure 8.4 plots the backscatter for a rigid sphere as a function of frequency. The results exhibit Rayleigh scattering at the lower frequencies and
approach pure reflection at higher frequencies. The oscillations at the higher
frequencies are caused by interference between the reflected wave and a portion of the incident plane wave that is diffracted around the entire sphere.
8.3. INHOMOGENEOUS MEDIUM METHOD
187
1.4
1.2
Backscatter/(a2 /4)
1
0.8
0.6
0.4
0.2
0
0
2
4
6
8
10
ka
Figure 8.4: Normalized backscatter as a function of frequency for a rigid
sphere.
8.3
Inhomogeneous Medium Method
For more complicated scatterer shapes, approximate methods are required to
find the scattered amplitude. The first treats scatterers as localized variations
in medium properties. For acoustics, the wave equation for an inhomogenous
medium is given by:
∇2 p −
1 ∂ 2p
= −[k 2 γκ (r)p(r, t) − ∇ · γρ (r)∇p(r, t)]
v 2 ∂t2
where γρ and γκ quantify the variations in medium density and compressibility introduced by the scatterers:
188
CHAPTER 8. SCATTERING
ρs (r) − ρ
ρs (r)
κs (r) − κ
γκ (r) =
κ
γρ (r) =
(8.14)
(8.15)
Assuming harmonic time dependence for the pressure p(r, t) = pω (r)e−iωt
produces the Helmholtz equation for inhomogeneous media:
∇2 pω + k 2 pω = −[k 2 γκ (r)pω (r) − ∇ · γρ (r)∇pω (r)]
which is identical to the Helmholtz equation for radiators with the source
term:
f (r) = k 2 γκ (r)pω (r) − ∇ · γρ (r)∇pω (r)
(8.16)
The scattered wave can therefore be determined by inserting this term into
the radiation integral:
Z
pω,s (r) =
0
[k 2 γκ (r 0 )pω (r 0 ) − ∇0 · γρ (r 0 )∇0 pω (r 0 )]
eik|r−r |
dr 0
4π|r − r 0 |
Recasting the integral in a more usable form:
Z
pω,s (r) =
0
eik|r−r |
[k γκ (r )pω (r ) + γρ (r )∇ pω (r ) · ∇ ]
dr 0
4π|r − r 0 |
2
0
0
0
0
0
0
and applying the far-field approximation to the free space Green’s function
yields:
eikr −ik·r0 0
e
dr
pω,s (r) = [k 2 γκ (r 0 )pω (r 0 ) + γρ (r 0 )∇0 pω (r 0 ) · ∇0 ]
4πr
Z
eikr
0
0
=
[k 2 γκ (r 0 )pω (r 0 )e−ik·r − γρ (r 0 )∇0 pω (r 0 ) · ike−ik·r ]dr 0
4πr
Z
(8.17)
Notice that evaluating the radiation integral requires knowledge of the
total pressure pω (r), which is the sum of the incident and scattered pressures.
8.3. INHOMOGENEOUS MEDIUM METHOD
189
Because the scattered pressure is initially unknown, the total pressure is
often approximated as the incident pressure alone. This approximation is
called the Born approximation, and is reasonable when the scattered wave is
weak relative to the incident wave. Its accuracy can be improved by making
recursive approximations, i.e. inserting the result for the scattered wave back
into the radiation integral along with the incident wave and reevaluating.
For an incident plane wave, the approximation yields:
Z
eikr
0
0
[k 2 γκ (r 0 )(Ai eiki ·r )e−ik·r
pω,s (r) ≈
4πr
0
0
− γρ (r 0 )∇0 (Ai eiki ·r ) · ike−ik·r ]dr 0
Z
eikr
0
0
[k 2 γκ (r 0 )e−i(k−ki )·r + γρ (r 0 )(ki · k)e−i(k−ki )·r ]dr 0
≈ Ai
4πr
Z
eikr
0
[k 2 γκ (r 0 ) + γρ (r 0 )(ki · k)]e−i(k−ki )·r dr 0
≈ Ai
4πr
If the incident plane wave propagates in the -z direction such that ki · k =
k 2 (r̂ · −ẑ) = −k 2 cos θ:
Z
k 2 eikr
0
[γκ (r 0 ) − γρ (r 0 ) cos θ]e−iK·r dr 0
pω,s (r) ≈ Ai
4πr
and:
Z
k2
0
[γκ (r 0 ) − γρ (r 0 ) cos θ]e−iK·r dr 0
(8.18)
L̃(θ, φ, ω) ≈
4π
where K = k − ki = k(r̂ + ẑ). For a single scatterer with a uniform interior,
the scattering length becomes:
Z
k2
0
[γκ − γρ cos θ]
e−iK·r dr 0
L̃(θ, φ, ω) ≈
4π
scat
k2
≈
[γκ − γρ cos θ]SF T
4π
(8.19)
where the integral is over the volume of the scatterer and:
Z
SF T =
e
scat
−iK·r 0
0
ZZZ
0
0
0
e−i(Kx x +Ky y +Kz z ) dx0 dy 0 dz 0
dr =
scat
(8.20)
190
CHAPTER 8. SCATTERING
is the three-dimensional Fourier transform of the scatterer.
For electromagnetic waves, the radiation integral for the electric field with
the far-field approximation applied is given by:
eikr
Eω,s (r) =
4πr
Z
0
0
[k × γ (r 0 )Eω (r 0 ) × ke−ik·r − ωk × γµ (r 0 )Bω (r 0 )e−ik·r ]dr 0
(8.21)
where γ and γµ quantify the variations in the medium permittivity and
permeability introduced by the scatterers:
(r) − s
µs (r) − µ
γµ (r) =
µs (r)
(8.22)
γ (r) =
(8.23)
Because the wave is spherical, the corresponding magnetic field is perpendicular with magnitude Bω,s = Eω,s /v. Applying the Born approximation for an incident plane wave where the corresponding magnetic field is
Bω = k̂i /v × Eω :
Z
eikr
0
0
[k × γ (r 0 )(Ai eiki ·r ) × ke−ik·r
Eω,s (r) ≈
4πr
0
0
− ωk × γµ (r 0 )(k̂i /v × Ai eiki ·r )e−ik·r ]dr 0
Z
eikr
0
[k × γ (r 0 )Ai × k − k × γµ (r 0 )(ki × Ai )]e−i(k−ki )·r dr 0
≈
4πr
Z
eikr
0
≈
[k × γ (r 0 )Ai × k + ki × γµ (r 0 )Ai × k]e−i(k−ki )·r dr 0
4πr
If the incident plane wave propagates in the -z direction:
k 2 eikr
Eω,s (r) ≈ |Ai |
4πr
Z
0
[r̂ × γ (r 0 )Âi × r̂ − ẑ × γµ (r 0 )Âi × r̂]e−iK·r dr 0
and:
k2
L̃(θ, φ, ω) ≈
4π
Z
0
[r̂ × γ (r 0 )Âi × r̂ − ẑ × γµ (r 0 )Âi × r̂]e−iK·r dr 0 (8.24)
8.3. INHOMOGENEOUS MEDIUM METHOD
191
For a single, uniform scatterer:
L̃(θ, φ, ω) ≈
k2
[r̂ × γ Âi × r̂ − ẑ × γµ Âi × r̂]SF T
4π
(8.25)
If the scatterer is small relative to the wavelength and the origin for the
SF T is placed within the scatterer, K · r 0 ≈ 0 such that the SF T yields
the volume of the scatterer. For an acoustic scatterer, the scattering length
becomes:
L(θ, φ, ω) ≈
k 2 Vscat
[γκ − γρ cos θ]
4π
(8.26)
which exhibits Rayleigh scattering as expected. For a spherical scatterer, in
particular:
k 2 a3
L(θ, φ, ω) ≈
3
κs − κ ρs − ρ
cos θ
−
κ
ρs
(8.27)
which is almost identical to the exact result obtained by applying boundary conditions (Equation 8.11). The discrepancy in the density terms is a
consequence of the Born approximation, and becomes significant when the
difference between the scatterer and medium densities is large. For an electromagnetic scatterer:
k 2 Vscat
[r̂ × γ Âi × r̂ − ẑ × γµ Âi × r̂]
L(θ, φ, ω) ≈
4π
(8.28)
where the bracketed terms determine the angular dependence of the scattering. The first is dependent upon the sine of the angle between r̂ and the
incident electric field along Âi , and the second upon the sine of the angle
between r̂ and the incident magnetic field along −ẑ × Âi .
For larger scatterers, the SF T changes the frequency/angular dependence
of the scattering and can often be evaluated for simple shapes. For a sphere
with radius a centered on the origin:
Z
a
Z
π
Z
SF T =
0
0
2π
0
e−iK·r r02 sin θ0 dφ0 dθ0 dr0
0
Because the problem possesses spherical symmetry, K can be aligned with
the z 0 -axis without loss of generality such that:
192
CHAPTER 8. SCATTERING
a
Z
Z
π
Z
2π
SF T =
0
Z
0
a
Z
= 2π
Z0 a
= 2π
Z0 a
= 2π
4π
=
K
Z0 a
e−iKr
0
π
e−iKr
0
0
cos θ0 02
r sin θ0 dφ0 dθ0 dr0
cos θ0 02
r sin θ0 dθ0 dr0
0
1 −iKr0 cos θ0 π 0 0
e
|0 r dr
iK
1 iKr0
−iKr0
r0 dr0
e
−e
iK
r0 sin Kr0 dr0
0
The final integral can be evaluated using integration by parts to yield:
4π 1
(sin Kr0 − Kr0 cos Kr0 )|a0
K K 2
4πa3 sin Ka cos Ka
=
−
Ka (Ka)2
Ka
j1 (Ka)
= 4πa3
Ka
SF T =
A simple substitution can be made for K:
p
(kr̂ + k ẑ) · (kr̂ + k ẑ)
√
= k 2 + k 2 + 2k 2 cos θ
r
1 + cos θ
= 2k
2
= 2k cos(θ/2)
K=
such that:
SF T = 4πa3
j1 (2ka cos(θ/2))
2ka cos(θ/2)
(8.29)
Figure 8.5 shows the corresponding acoustic scattering length, and compares
it with the exact result obtained by applying boundary conditions. Figure 8.6
8.4. KIRCHOFF METHOD
193
does the same for the backscatter. The agreement is good except in the forward direction for larger values of ka. For scatterers with more complicated
shapes, where analytic calculation of the SF T is impossible, the multipole
expansion can be applied to the SF T as it was to the radiation integral in
Subsection 6.2.2 and the resulting series evaluated.
90 0.1
120
90 0.2
60
0.05
150
120
30
180
330
240
0.1
150
0
210
60
300
30
180
0
210
330
240
300
270
270
ka = 1
ka = 5
Figure 8.5: Normalized acoustic scattering length (|L̃|/(a/2)) for a sphere obtained using the inhomogeneous medium method (dashed) and the boundary
condition method (solid). The density of the scatterer is 10 percent greater
and the compressibility 10 percent less than for the background.
8.4
Kirchoff Method
An alternative method for approximating the scattered amplitude employs
the Kirchoff integrals. Recall from Section 7.1 that for a scalar wave:
194
CHAPTER 8. SCATTERING
0.012
Backscatter/(a2 /4)
0.01
0.008
0.006
0.004
0.002
0
0
2
4
6
8
10
ka
Figure 8.6: Normalized acoustic backscatter for a sphere obtained using
the inhomogeneous medium method (dashed) and the boundary condition
method (solid). The density of the scatterer is 10 percent greater and the
compressibility 10 percent less than for the background.
I
ψω (r) =
[Gk (r, r 0 )∇0 ψω (r 0 ) − ψω (r 0 )∇0 Gk (r, r 0 )] · dS 0
S0
where ψω (r) is a desired wave function and the surface integral is performed
over the boundary of the spatial region for which that wave function is desired. For a scattered wave function, the inner boundary is typically chosen
to conform to the surface of the scatterer and the outer boundary is expanded
toward infinity. Selecting the free space Green’s function nullifies the integral
on the outer boundary leaving:
8.4. KIRCHOFF METHOD
1
ψω,s (r) =
4π
Z
scat
195
0
ik|r−r 0 |
eik|r−r | 0
0
0
0e
∇ ψω,s (r ) − ψω,s (r )∇
· dS 0 (8.30)
0
0
|r − r |
|r − r |
which is the scalar Kirchoff integral, but evaluated over the surface of the
scatterer rather than a diffracting boundary. Applying the far-field approximation to the free space Green’s function yields:
eikr
ψω,s (r) =
4πr
Z
0
e−ik·r [∇0 ψω,s (r 0 ) + iψω,s (r 0 )k] · dS 0
(8.31)
scat
The Kirchoff integral is identical for vector waves, so the same expression
can be used to calculate scattered vector wave functions with ψω,s replaced
by ψω,s .
Notice that an exact solution for the scattered wave function requires
prior knowledge of its values on the surface of the scatterer. Because these
are generally unknown, they are typically approximated using the Kirchoff
scattering approximation, which asserts that the scattered wave function at
each point on the illuminated/front surface of the scatterer is approximately
equal to the reflected wave function that would be produced by an infinite
planar boundary parallel to the surface at that location, and that at each
point on the dark/back surface of the scatterer, it is approximately equal to
the negative of the incident plane wave function at that location such that the
two destructively interfere to produce a shadow. These assumptions produce
reasonable results as long as the surface of the scatterer is relatively flat, i.e.
its curvature is large in comparison to the wavelength. The Kirchoff approximation is therefore valid for short wavelengths/high frequencies. Because the
approximation ignores the effects of waves inside the scatterer, transmission
through the scatterer boundary must also be relatively weak.
For a scalar plane wave incident upon an arbitrary scatterer as shown in
Figure 8.7, the scattered wave function and its gradient on the illuminated
surface of the scatterer are approximated by:
ψω,s (r 0 ) ≈ R(θi )Ai eikr ·r
0
∇0 ψω,s (r 0 ) ≈ ikr R(θi )Ai eikr ·r
0
196
CHAPTER 8. SCATTERING
Figure 8.7: Geometry for the Kirchoff scattering approximation.
where R(θi ) is the reflection coefficient for the corresponding planar surface.
Recall from Section 4.2 that imposing boundary conditions requires kr · r 0 =
ki ·r 0 at a planar surface. Making this substitution to simplify the calculation:
ψω,s (r 0 ) ≈ R(θi )Ai eiki ·r
0
∇0 ψω,s (r 0 ) ≈ ikr R(θi )Ai eiki ·r
0
Inserting these results into the Kirchoff integral yields the contribution to
the total scattered wave function by the illuminated side of the scatterer:
8.4. KIRCHOFF METHOD
197
Z
h
i
eikr
0
0
0
ψω,s,ill (r) ≈
e−ik·r ikr R(θi )Ai eiki ·r + ikR(θi )Ai eiki ·r · dS 0
4πr ill
Z
iAi eikr
0
≈
R(θi )[kr + k]e−i(k−ki )·r · dS 0
4πr ill
Z
ikAi eikr
0
≈
R(θi )[cos θi + cos θs ]e−i(k−ki )·r dS 0
(8.32)
4πr
ill
The corresponding contribution to the scattering length is given by:
i
L̃ill (θ, φ, ω) ≈
2λ
Z
0
R(θi )[cos θi + cos θs ]e−i(k−ki )·r dS 0
(8.33)
ill
Notice that for scattering in the forward direction where k ≈ ki , cos θs ≈
− cos θi and the surface integral vanishes. Physically, the scattering produced
by the illuminated side is due to reflection of the incident plane wave by the
scatterer surface, and very little reflection occurs in the forward direction.
The scattered wave function and its gradient on the dark surface of the
scatterer are approximated by:
ψω,s (r 0 ) ≈ −Ai eiki ·r
0
∇0 ψω,s (r 0 ) ≈ −iki Ai eiki ·r
0
Inserting these expressions into the Kirchoff integral yields the contribution
to the total scattered wave function by the dark side of the scatterer:
Z
h
i
eikr
0
0
0
e−ik·r −iki Ai eiki ·r − ikAi eiki ·r · dS 0
ψω,s,drk (r) ≈
4πr drk
Z
iAi eikr
0
[ki + k]e−i(k−ki )·r · dS 0
(8.34)
≈−
4πr drk
For scattering in the backward direction, k ≈ −ki and the surface integral vanishes. Physically, the scattering produced by the dark side is due to
diffraction of the incident plane wave around the edges of the scatterer, which
only occurs in the forward direction where k ≈ ki . This substitution can be
198
CHAPTER 8. SCATTERING
made within the bracketed term, but the complex exponential is more sensitive to small differences in k and ki . For an incident plane wave propagating
in the -z direction where ki = −k ẑ, the approximation k ≈ (kx x̂ + ky ŷ − k ẑ)
can be used such that:
Z
i2Ai eikr
0
ψω,s,drk (r) ≈ −
e−i[(kx x̂+ky ŷ−kẑ)−(−kẑ)]·r ki · dS 0
4πr
Z drk
ik2Ai eikr
0
0
≈
e−i(kx x +ky y ) dSz0
4πr
drk
On the dark side of the scatterer, dSz0 = −dx0 dy 0 where the integration limits
for x0 and y 0 correspond to the boundaries of the physical cross section of the
scatterer σp , so:
iAi eikr
ψω,s,drk (r) ≈ −
λ r
Z
0
0
e−i(kx x +ky y ) dx0 dy 0
(8.35)
σp
which is identical to the diffracted wave produced by an aperture with the
same shape as the physical cross section of the scatterer. When added to the
incident plane wave, the two destructively interfere to produce the diffracted
wave for a flat obstacle with the same shape as the physical cross section of
the scatterer. The corresponding contribution to the total scattering length
is given by:
i
L̃drk (θ, φ, ω) ≈ −
λ
Z
0
0
e−i(kx x +ky y ) dx0 dy 0
(8.36)
σp
Consider a rigid sphere as an example, where R(θi ) = 1. The illuminated
scattering length is difficult to calculate for all scattering angles, but is manageable for the backward direction. In that case, θs = θi and for a plane
wave incident along the -z direction, k − ki = k ẑ − −k ẑ = 2k ẑ such that:
i
L̃ill,back (ω) ≈
λ
Z
0
cos θi e−i2kz dS 0
ill
Working in spherical coordinates where θi = θ0 :
8.4. KIRCHOFF METHOD
i
L̃ill,back (ω) ≈
λ
π/2
Z
≈ ia2
199
Z
0
2π
λ
Z
2π
0
cos θ0 e−i2ka cos θ a2 sin θ0 dφ0 dθ0
0
π/2
0
cos θ0 sin θ0 e−i2ka cos θ dθ0
0
Substituting x = cos θ0 yields:
2
Z
L̃ill,back (ω) ≈ −ika
0
xe−i2kax dx
1
Z 0
1 −i2kax
−1 −i2kax 0
≈ −ika
xe
+
e
dx
i2ka
1
1 i2ka
1 −i2ka
1 −i2kax 0
2
≈ −ika
e
+ 2 2e
i2ka
4k a
1
1
1 −i2ka
1 −i2ka
2
e
+ 2 2 − 2 2e
≈ −ika
i2ka
4k a
4k a
2
At high frequencies where the Kirchoff approximation is valid, ka 1 and
the last two terms can be dropped leaving:
a
L̃ill,back (ω) ≈ − e−i2ka
(8.37)
2
Ignoring the variable phase, this result matches the scattering length calculated earlier for reflection from a rigid sphere L̃r . The scattered wave
produced by the dark side of the sphere is identical to the diffracted wave
produced by a circular aperture with radius a calculated in Section 7.3. The
corresponding scattering length is given by:
L̃drk ≈ −
iπa2 2J1 (ka sin θ)
λ
(ka sin θ)
(8.38)
which compares favorably with the exact result at forward angles and high
values of ka as illustrated in Figure 8.8.
200
CHAPTER 8. SCATTERING
12
10
|L̃|/(a/2)
8
6
4
2
0
135
140
145
150
155
160
165
170
175
180
θ
Figure 8.8: Normalized scattering length (|L̃|/(a/2)) for a rigid sphere
obtained using the Kirchoff method (dotted) and the boundary condition
method (solid) for ka = 10.
View publication stats