N O T E S ON T H E C E N T R A L F O R C E r"
R. B R O U C K E
Dept. of Aerospace Engineering and Engineering Mechanics, University of Texas at Austin,
Austin, Texas, U.S.A.
(Received 18 January, 1980)
Abstract. In this article we collect several results related to the classical problem of two-dimensional
motion of a particle in the field of a central force proportional to a real power of the distance r. At
first we generalize Whittaker's result of the fourteen powers of r which lead to integrability with
elliptic functions. We enumerate six more general potentials, including Whittaker's fourteen potentials as particular cases (Sections 2 and 3).
Next, we study the stability of the circular solutions, which are the singular solutions of the
problem, in Whittaker's terminology. The stability index is computed as a function of the exponent n
and its properties are explained, especially in terms of bifurcations with other families of ordinary
periodic solutions (Sections 4, 5 and 7). In Section 6, the detailed solution of the inverse cube force
problem is given in terms of an auxiliary variable which is similar to the eccentric anomaly of the
Kepler problem.
Finally, it is shown that the stable singular circular solutions of the central force problem generalize
to stable singular elliptic solutions of the two-fixed-center problem. The stability and the bifurcations
with other families of periodic solutions of the two-fixed-center problem are also described.
I. Introduction
In this article we collect several results related to the motion of a particle in the
plane under the effect of a central force proportional to a real power n of the
radius vector r. The original intention of the study of this well-known integrable
problem was to compare integrable and non-integrable systems. The last sections
of the article contain the most important conclusion of this comparison.
The problem of central force motion has been studied since the early times of
Newton and Euler. In the nineteenth century, several attempts were made to
solve central force problems with elementary functions or with elliptic integrals
(Legendre, 1825; Stader, 1853; Nobile, 1908). Most of these results are collected in
such classical textbooks as Whittaker's treatise on analytical dynamics (Whittaker,
1959; pp. 86-116 of the first edition in 1904). Many of the results concern the force
A/r2+ B/r 3 and center around Newton's theorem on revolving orbits. Whittaker
also studied the force A i r 4 + B/r 5, although little is known in the literature on forces
which are linear combinations of several terms r". Some other classical books
treating the central force problem are Goldstein (1957, pp. 72-76 and 91), McCuskey
(1963, pp. 23-24 and 29), Moulton (1914, pp. 81-96 and the historical sketch on p. 97)
and Danby (1970, pp. 57-64 and 84).
However, during the course of our study and the examination of the classical
literature, some new general properties were discovered. In Sections 2 and 3 we
Astrophysics and Space Science 72 (1980) 33-53.0tNM-640X/80/0721-0033503.15.
Copyright 9 1980 by D. Reidel Publishing Co., Dordrecht, Holland, and Boston, U.S.A.
34
R. BROUCKE
generalize Whittaker's results (1959, pp. 81-82) which states that for, exactly
fourteen values of the exponent n, the problem can be solved with elliptic
integrals. We find six more general potentials, all functions of the radius-vector r
only, which can be integrated with elliptic integrals and which contain Whittaker's fourteen exponents as special cases.
Our Six potentials are linear combinations of four terms of the form r ". The
arbitrary constants can be adjusted in order to approximate some potentials such
as those occurring in satellite theory. The satellite theories of Sterne (1960),
Vinti (1969), Garfinkel (1959), and Aksnes (1970) are all examples where a
reference orbit is sought which can be integrated in terms of the elliptic
integrals. Many other problems can also be found where particular cases of our
potentials may be used. For instance, a potential A i r + B/r 2 has been used in the
atmospheric drag problem. Also, the potential A / r + B / r 2 is used in relativity
theory or in the J2 harmonic, at least for the equatorial case. The effect of the
term B/r 2 is essentially a precession of the orbits, as is known from Newton's
T h e o r e m 44 of revolving orbits (Newton, Vol. 1, Book 1, 1686; Whittaker, 1959,
p. 83). We note that all six of our general potentials contain the term A / r 2, so
that in all cases N e w t o n ' s theorem could be applied. A classical example in
physics is the Lenard-Jones potential A/r~2+B/r6 which, however, is not a
particular case of one of our six potentials.
In Sections 4 and 5 we discuss the circular solutions which play a v e r y special
role. The stability and characteristic exponents of these solutions are discussed
in order to give some insight to the meaning of the characteristic exponents of
non-integrable systems - more particularly, in order to explain the bifurcation of
families of periodic solutions. The stability of circular orbits in a central force
field has already been studied in the classical literature (Danby, 1970, p. 58; Pars,
1965, p. 146), but we extend these results to a detailed discussion of the stability
curve as a function of the exponent n of the force r" and the consequences of its
structure: the bifurcations to families of non-circular periodic orbits. Section 7
gives some examples of families of periodic s o l u t i o n s - which are natural branches of the family of circular o r b i t s - t h r o u g h the bifurcation phenomenon. In
the study of these solutions, it was found that three potentials are rather special,
not only because they are integrable with elementary functions but also for
several other reasons. These are the potentials A l r (Kepler problem), A r 2
(harmonic oscillator) and A / r 2, which is the so-called N e w t o n - C o t e s spirals
problem (Whittaker, 1959; pp. 82-83). In Section 6 we develop a solution of the
Cotes spirals problem with the use of a regularization of the form dt = r ds and
the use of an eccentric anomaly, showing a remarkable analogy with the Kepler
problem: both problems can be reduced to a harmonic oscillator, through the
same change of variables.
Finally, in the last section we show an analogy between the two-fixed-center
problem and the central force problem. Integrable dynamical systems usually
have mostly ordinary periodic solutions with all zero characteristic exponents,
NOTES ON THE CENTRAL
FORCE
35
r"
but also some singular periodic solutions with a pair of non-zero characteristic
exponents. In the central force problem, the circular orbits are these singular
solutions, while in the two-fixed-center problem the circular orbits transform
into a family of elliptic orbits. The principal p r o p e r t y of these singular orbits is
that the fundamental integrals fail to be independent on these orbits.
2. Equations of Motion
We consider planar motion under the action of a central force f depending only
on the radius vector r. In polar coordinates the equations of motion are
t" - - r O 2 =
f(r),
(2.1a)
r0 + 2~0 = 0.
(2. lb)
T h e y have fiae angular m o m e n t u m integral r 2 0 = C and the energy integral
E = ~(rl .2 + rZ02) -
f0f(r)
dr = c o n s t . ,
(2.2)
which can also be expressed in terms of the radial coordinate r alone: i.e.,
r2= 2[E + ~i f ( r ) d r ] - C 72 "
(2.3)
We shall only discuss the case where the force is derivable f r o m a potential
function which is a real p o w e r of the radius r - i.e.,
U
f f(r) dr =Arm ,
(2.4)
where A is an arbitrary constant and the exponent m is not necessarily an
integer. We shall exclude the case m = 0, although this is not a completely
meaningless case: it corresponds to a uniform radial motion with no force and
constant speed. At this point we also exclude the forces which are proportional
to the inverse distances and which have a logarithmic potential ( dr]r = In r),
although this is an important limiting case. In what follows we shall be interested
not only in the potentials of the f o r m (2.4), but also in sums of such potentials,
where each term has a different value of m. In particular, we shall examine the
question of finding the m o s t general sum of this type which can be solved with
elliptic integrals.
Under the assumption of the existence of the potential function (2.4), the
energy equation (2.3) can be written as
i2
=
2(E
+ U)
-
C2r
-2
.
(2.5)
In order to simplify and eventually integrate this equation, we p e r f o r m e d the
following change of variable, r to v - i . e . ,
r = v~;f =av~-If;,
(2.6)
36
R. BROUCKE
where a is a real exponent (a # 0). The energy equation (2.5) now takes the form
OZ2/) 2 = 2 E l ) 2-2a +
2Av '~'n-2"+2
-
-
C 2 / j 2-4a ;
(2.7)
E and C being the constants of energy and angular momentum. This equation
will be studied in detail in the next section.
3. Integration with Elliptic Integrals
We are now interested in finding values of a and m which allow the reduction of
(2.7) to standard elliptic integrals. This can be done (see Whittaker and Watson,
1965; p. 512) if the equation can be written in the f o r m
/5 = v k = X / i f ( v ) ,
(3.1)
where k is some integer and where P(v) represents a fourth-degree polynomial
in the new radial coordinate v. In other words, the right-hand side of (2..7) should
be a polynomial of maximum degree 4, eventually multiplied by a factor v 2k
which is an even integer power of v. Consequently, the exponents 2 - 2 a and
2 - 4 a must be integers whose difference is 4 at the most. In other words, 2a
must be one of the integers from - 4 to +4. Therefore o~ can only have one of
these eight values:
a = -2,--~,-1,-~,~,
Each of these eight values of a can, in turn, be used to discuss the possible
values of m : the c o m p o n e n t a m - 2a + 2 must be an integer which differs by 4
units, at the most, from the two other exponents 2 - 2 a and 2 - 4 a . As an
example, we discuss here only one case corresponding to a = - 8 9 the seven
other cases being entirely similar. Here we have 2 - 2 a = 3 and 2 - 4 a = 4 ;
therefore, the exponent m a + 2 - 2 a = 3 - m/2 can only range from 0 to 6, the
integer 2k being either 0 or 2. We have then the two solutions:
2k = 0 ; m = - 2 , 2 , 4 , 6 ,
2k = 2; m = - 6 , - 4 , - 2 , + 2 .
(3.3)
We find that the two solutions differ only by the sign of m. However, this is not
the case with the solutions corresponding to the other values of a. If all the other
values of a are examined in detail, we find a total of only six distinct groups of
solutions. The same group of m-values is obtained for several different values of
a or 2k. Table I lists all six groups of values of m. Each group in m can he
obtained with the two values of a indicated and the value of 2k given in the
column next to the colume for ~. Note that we speak here in terms of groups of
values rather than values of m ; this is because the values of the same group can
be combined to give a new potential function containing several terms, each
term having an arbitrary coefficient and a different power of m. Therefore, we
NOTES
ON
THE
CENTRAL
FORCE
37
rn
TABLE I
The six groups of values of the exponent m. Next
to the columns for c~ are the columns of values of
2k which correspond to the value of ~.
m
a
2r
oe
2r
-2, _3,-1,- 89
-2,-~, -~,3
22
- 2 , - 1 , 1,2
-4,-3,-2,-1
-2,2,4,6
-6,-4,-2,2
-2
-_~3
-1
-1
-~
-~f
6
2
-6
4
~
-4
2
4
0
2
1
1
~
{
-2
-4
0
-2
h a v e the following six general potential f u n c t i o n s w h i c h are integrable in terms o f
the elliptic f u n c t i o n s :
U = A r -2 + B r -3/2 + C r -I + D r -1/2 ,
(3.4a)
U = A r -2 + B r -4/3 + C r -213 Jr- D r 2/3 ,
(3.4b)
U = A r -2 + B r -1 + C r + D r 2 ,
(3.4c)
U = A r -4 + B r -3 + C r -2 + D r -1 ,
(3.4d)
U = A r -2 + B r 2 + C r 4 q- D r 6 ,
(3.4e)
U = A r -6 +
(3.4f)
B r -4 + C r -z + D r 2 .
E a c h of these potentials c o n t a i n s f o u r terms, one o f w h i c h is a term in r - 2 in
e a c h case. In actually solving the c o r r e s p o n d i n g d y n a m i c a l s y s t e m s , this term
could be neglected. Its effect can be r e c o v e r e d b y applying N e w t o n ' s t h e o r e m of
r e v o l v i n g orbits (Whittaker, 1959; p. 83): if the solution w i t h o u t the r-Z-term is
r = F ( O ) , then the solution with the r 2-term is of the f o r m r = F ( a O ) , w h e r e a is
a c o n s t a n t and the time intervals b e t w e e n c o r r e s p o n d i n g points in the two orbits
are the same.
W e also notice that if o n l y a s i n g l e t e r m is t a k e n in e a c h potential function, we
find that there are e x a c t l y f o u r t e e n values o f m which are solvable b y elliptic
integrals. T h e y w e r e f o u n d b y L e g e n d r e and Nobile (see Whittaker, 1959; p. 81).
A m o n g the f o u r t e e n values of m, nine are integer and five are fractional:
I
m= -6,-4,-3,-2,-1,
m = - 53, -~,1 -~,4 -~,2 23.
1,2,4,6 ;
(3.5)
N o t e that W h i t t a k e r gives the p o w e r n of r in the f o r c e rather than the potential
f u n c t i o n (n = m - 1).
W e finally m e n t i o n an i m p o r t a n t subset of values of m : t h e y lead to a s y s t e m
w h i c h is solvable with e l e m e n t a r y f u n c t i o n s rather t h a n elliptic integrals. T h e
38
R. BROUCKE
discussion is similar to what has just been said, but the polynomial P ( v ) must
be of second degree only. Consequently, we must have [2a[~<2, with 2a
integer. There are thus only four possible values: a = - 1 , _l, 89 1. This leads
to three possible values of m: - 2 , - 1 and 2 - t h e Cotes spirals, the Kepler
problem, and the harmonic oscillator. As for the linear combinations, only two
groups are possible: namely,
U = A r -I + B r 2,
(3.6a)
U = A r 2 + B r 2.
(3.6b)
and
They are solved by first solving the Kepler problem and the harmonic oscillator
and then applying Newton's revolving orbit theorem to include the effect of the
r-2-term.
4. The Circular Solutions and their Stability
If is seen from the equations of motion (1) that there is an important special
solution corresponding to ? = ~ = 0 = 0. It is a uniform rotation along a circle of
given radius r, with angular velocity given by
02=
(4.1)
-f(r)/r = -Amr"-2.
In order to have an attractive rather than a repulsive force, we take A m = - 1 .
The attractive force per unit mass is then U~ = - r m-I. In order to analyze the
linear radial stability of these circular motions we begin by giving the Hamiltonian of the problem and we derive the variational equations of the circular
orbits.
Let us consider the Hamiltonian
H = - ~1(
pr
+ p~2-0f -~/ -
(4.2)
U(r),
with the potential function U = A r m ( A m = - 1 ) .
motion are
=pr,
_ p ~20 +
Or -- r 3
0
The canonical equations of
=~,
(4.3)
[Jr,
19o = O .
The variational equations corresponding to the above system are
-3(p20]r 4) + grr
1
0
0
0
-- 2(po/r 3)
0
0
0
0
0
0
a/$
,~po
x
: J [;0J
(4.4)
NOTES ON THE CENTRAL
FORCE
39
r n
W e solve the variational equations relative to the circular solution (r = 1;t: =
0; Po = 1). T h e A - m a t r i x of the a b o v e variational e q u a t i o n is c o n s t a n t in this
case: i.e.,
A=
0
-3+Ur,
-2
0
1 0
0 0
0 0
0 0
01
1
1
0l
_l
(4.5)
The c h a r a c t e r i s t i c
exponents
o~ o f the circular solution are given b y the
c h a r a c t e r i s t i c e q u a t i o n in s o f the f o r m
det ( a - s I ) = s2(s 2 - (Urr - 3)) = 0 .
(4.6)
In the p r e s e n t case Urr = --(m -- 1)r m-z = 1 -- m. W e h a v e the e q u a t i o n
s2(s2 + m + 2 ) = 0 .
(4.7)
W e h a v e t w o cases to consider:
1. m < - 2 . In this case the r o o t s are real: i.e.,
c~ = + X / - Z 2
-m
.
(4.8)
The s t a b i l i t y i n d e x is given b y
1 =
k = a + ~-
e Z i i ~ q-- e _ Z n ~
= 2 ch ( 2 I I ~ / ~ ) .
(4.9)
W e h a v e k > 2 and all the circular solutions are u n s t a b l e .
2. m > - 2 . H e r e we have two p u r e imaginary characteristic e x p o n e n t s
= +- i X / 2 + m
(4.10)
9
The s t a b i l i t y i n d e x is n o w given by
k = A +~-1 = e2mX/2 + m + e-Znix/2-+---mm=
cos ( 2 I I ~ )
.
(4.11)
I n this c a s e the circular solutions are therefore, stable. H o w e v e r , the limiting
values k = - 2 or + 2 are r e a c h e d for several special values of m. W e have k = + 2
w h e n e v e r 2 + m is a p e r f e c t square integer; for instance, m = - 1 , 2, 7 . . . . . At
these special values o f m the stability c u r v e is tangent to k = +2. H o w e v e r , w h e n
m = - 2 , the stability c u r v e c r o s s e s the line k = +2.
T h e stability index k is equal to - 2 w h e n e v e r X/2 + rn is of the f o r m (2/3 + 1)/2
1 17
w i t h / 3 integer. F o r / 3 = 0, 1, 2 this gives m = -~,7 ~,-~.
Similar c o n c l u s i o n s , but a
little m o r e insight, are o b t a i n e d b y considering the variational e q u a t i o n in r,
w h i c h is of the f o r m
6~ = - ( m + 2) 6 r .
This again leads to stability o n l y w h e n m > - 2 .
(4.12)
In the stable case an a p p r o p r i a t e
40
R. B~:OUCKE
solution is
8r = C cos X/m + 2 t ,
(4.13)
where C is the initial value of the perturbation. After a single revolution t = 2II,
the perturbation is
6rT
=
C cos(~/m + 2 x 2H).
(4.14)
This shows that at e v e r y revolution an initial perturbation is multiplied b y a
factor cos (2HX/m +2). This factor is unity when we have resonance b e t w e e n
the principal circular motion with period 2II and the perturbation, which happens
w h e n ~ / m + 2 is an integer or rn + 2 a perfect square. The stability curve
(stability index k = A + 1/A versus the e x p o n e n t n = m - 1) is given in Figure 1.
The stability diagram shows a remarkable coincidence in the central force
problem: the stability index k reaches the limiting value k = + 2 at the three
values of n ( - 3 , - 2 , + 1) which are integrable with e l e m e n t a r y functions, without
the need of elliptic integrals. The solutions corresponding to n = - 2 and +1
(Kepler p r o b l e m and harmonic oscillator) are well known. In Section 6 we give a
detailed solution of the case n = - 3 .
In Section 8 we shall discuss a generalization of the Kepler p r o b l e m (n = - 2 )
to the two-fixed-center problem. Therefore, we give here the general f o r m of the
m o n o d r o m y matrix R of the periodic solutions of the K e p l e r problem. For the
elliptic orbits this is
0
0
0
1
;0
0
t3
1
8
0
0
1
1
R=
a
'
with a6 - / 3 h = 0 and r a n k (R - I ) = 1.
For the circular orbits, this m o n o d r o m y matrix b e c o m e s
o o o
R=
_
1
0
0
1
0
0
a
-a
1
where again rank (R - I ) = 1.
L e t us finally explain the contradictory situation of the non-zero characteristic
exponents of'this perfectly integrable dynamical system. N o n - z e r o characteristic
exponents c o r r e s p o n d to eigenvalues )t and l/?t different f r o m unity. In all
integrable system, the eigenvalues are normally equal to 1. W h y do we h a v e two
eigenvalues different f r o m 17
This question can be explained because, on the circular orbits, the two
independent integrals of the p r o b l e m fail to be independent: the gradients of the
energy and angular m o m e n t u m integrals are parallel. This is easily seen b e c a u s e
tn:-
-n = - 3
[Cotes Spirals
k
Fig. 1.
(Kepler)
n = -2
. n = +1 Harmonic
Oscillator
n=m-I
Stability index of circular orbits in the central force field.
--I
2
k
,(-n = 6
n
0
>
Z
C~
0
Z
H
Z
0
,-]
42
R. B R O U C K E
if the two integrals are
E = ~(72 +
/z
r202) _ __
r m
(4.15)
and
C = r zO
(4.16)
we have the gradients (in phase space)
grad C =
(2rO, O, O, r2),
g r a d E = ( r~+mtx
r-~,
(4.17)
0, b, r20 ) .
(4.18)
These two vectors are parallel because the (2 x 4)-matrix of components is of
rank 1: i.e.,
F 2rO
r21 = r2(rO2-r~+l )
det LrO2
= r2i:
(4.19)
r20
is zero on the circular orbit.
5. The Non-circular Solutions
We shall give here the most important property of the non-circular solutions of
the potential function U = Ar m (with Am = - 1). We restrict ourselves to negative
values of m. We shall show again that there are two important cases to be
discussed, separated by the special case m = - 2 . We shall only discuss the
subcircular motion inside the circular orbit. This is no loss of generality. The
transformation u = 1/r allows us to map outside orbits into inside orbits, and
vice-versa.
We take initial conditions ~0 = 0; r0 = 1 and assume the velocity at this point to
be smaller than the circular velocity at the same point. Thus, 00 < 1; C < 1. The
energy of the subcircular orbit is
C 2 r "~
E=~r~r2§ m
C2 1
2 ~m"
(5.1)
We are now interested in studying the minimum value of the radius vector r on
any given orbit.
Let us first consider the radial acceleration
C2
/: = r3
1
r3+a ,
(5.2)
where we have defined the positive quantity 2 + a = - m . The above expression
f o r / : is c o m p o s e d of two terms, with opposite sign. When r = 1, the acceleration
N O T E S ON T H E C E N T R A L F O R C E r "
43
is n e g a t i v e : /: : C 2 - 1 < 0 . W h e n r < 1 t h e r e a r e t w o c a s e s :
1. I f o~ > 0 , t h e s e c o n d t e r m d o m i n a t e s w h e n r ~ 0 a n d / ; is a l w a y s negative: ?
a n d r a l w a y s decrease.
2. I f a < 0 , t h e first t e r m d o m i n a t e s w h e n r ~ 0 a n d /: b e c o m e s p o s i t i v e : t:
increases and may become positive.
S i m i l a r c o n c l u s i o n s a r e o b t a i n e d b y c o n s i d e r i n g t h e e x p r e s s i o n f o r ~2:
/.2 = C 2
2
2+~
k
2
2+o~
1
r 2+~
C2
r2.
(5.3)
A g a i n t h e b e h a v i o r d e p e n d s o n the sign o f t h e c o n s t a n t c~, d u e to the f a c t t h a t the
l a s t t w o t e r m s in t h e a b o v e e x p r e s s i o n h a v e o p p o s i t e signs. W h e n r t e n d s to
zero, we may have the following two situations:
1. F o r c~ > 0, t h e p o s i t i v e t e r m 1/r 2 + ~ d o m i n a t e s a n d f2 r e m a i n s p o s i t i v e . T h e
m o t i o n is t h u s p o s s i b l e i r r e s p e c t i v e o f t h e size o f r.
2. F o r a < 0 , t h e n e g a t i v e t e r m - C 2 ] r " d o m i n a t e s . T h e r e f o r e r r e a c h e s a
m i n i m u m v a l u e b e l o w w h i c h ~2 w o u l d b e c o m e n e g a t i v e .
N o t e t h a t in t h e limiting c a s e m = - 2 , ?2 is a l w a y s p o s i t i v e f o r all r(0 < r ~< 1);
t h u s t h e r e is no i n f e r i o r limit f o r r in t h e c a s e m = - 2 . W e c a n also s h o w t h a t f o r
r = 1 - e a n d e s m a l l p o s i t i v e , f2 is p o s i t i v e f o r all ~. T h i s is e a s y to see b e c a u s e , f o r
small e, w e h a v e r 2 = 1 - 2e, r e = 1 - ~E and t h e i n e q u a l i t y
C2(1-2)(1-1-2~)-[1-(1-c~)(1+2E)]~>0
(5.4)
1 -- C 2 ~ 0,
(5.5)
r e d u c e s to
w h i c h is a p r o p e r t y o f the a n g u l a r m o m e n t u m C = r20 n e a r the c i r c u l a r m o t i o n .
A s a c o n c l u s i o n , f o r m < - 2 , all n o n - c i r c u l a r m o t i o n s will t e r m i n a t e at the
s i n g u l a r i t y r = 0 in the s u b c i r c u l a r c a s e . In the c a s e o f - 2 < rn < 0 a n d n o n - z e r o
a n g u l a r m o m e n t u m , t h e r e a r e finite p o s i t i v e e x t r e m a f o r r: a so c a l l e d p e r i a p s i s
a n d a n a p o a p s i s . In the n e x t s e c t i o n we a n a l y z e in d e t a i l the s o l u t i o n o f t h e
i m p o r t a n t limiting c a s e o f t h e i n v e r s e c u b e f o r c e s (m = - 2 ) .
6. The Inverse Cube Forces
W e t a k e n o w a c l o s e r l o o k at t h e p l a n a r s y s t e m w i t h a p o t e n t i a l f u n c t i o n
U = tx/r m w i t h m = 2, w h e r e / x is a c o n s t a n t . B e f o r e w e i n t r o d u c e t h e m e t h o d o f
s o l u t i o n w e first d r a w t h e a t t e n t i o n of the r e a d e r to the L a g r a n g e - J a c o b i
i d e n t i t y , w h i c h g i v e s t h e s e c o n d d e r i v a t i v e o f t h e h a l f - m o m e n t of i n e r t i a ! = r2/2
as
i ' = (2 + M ) U + 2 E = (2 + m)/xr m + 2 E ,
(6.1)
w h e r e E is t h e e n e r g y c o n s t a n t . This e q u a t i o n s h o w s t h a t t h e r e a r e t w o
i m p o r t a n t s p e c i a l v a l u e s o f m. F i r s t , w h e n m = + 2 (the h a r m o n i c o s c i l l a t o r ) t h e
a b o v e e q u a t i o n is linear, w i t h c o n s t a n t coefficients, in r 2 a n d its s o l u t i o n is
44
R. B R O U C K E
immediate. On the other hand, when m = =2, the term in r m disappears and its
solution is also trivial: a double integration of J( = 2E gives
r 2 = 2Et 2+ Ct + D,
(6.2)
where C and D are constants of integration. If the energy constant E is
negative, we conclude that r 2 will be non-negative only b e t w e e n two specified
time intervals (tl, t2). On the other hand, r is m a x i m u m (rA) at the midpoint
tA = (tl + t2)/2.
It should be mentioned that we are in the presence of the only case where the
so-called e l e v e n t h integral (Losco, 1977) takes on a finite form, rather than just
being an integral of the variational equations (Wintner, 1947; pp. 115-117).
Another interesting f o r m of the solution is obtained b y introducing the change
of variables dt = r ds. The equation of motion for the radius r takes the new
form
d2r
ds 2 --- (2 + m ) l x r l§ + 2 E r .
(6.3)
We see that, in the present form, there are two values of m which result in a
drastic simplification (m = - 2 and m = - 1 ) , bringing the total n u m b e r of s i m p l e
cases to three ( + 2 , - 1 and - 2 ) . W h e n m = - 1 , we have the well-known
regularized f o r m of the K e p l e r problem, which we will not treat here.
W h e n m = - 2 , Equation (6.3), which represents the Cotes spirals problem, is
reduced to the other familiar problem: the harmonic oscillator
d2r
(6.4)
= 2Er.
We will assume that E is negative. The general solution, in terms of two
constants of integration (A, B), can be written as
/x = A cos u + B sin u ,
(6.5)
where u is the quantity ~ .
In what follows we call u the e c c e n t r i c
a n o m a l y , b y analogy with K e p l e r problem. The equation
r
dt = r d s = ~ d u ,
(6.6)
relating the time and the eccentric anomaly, can now be integrated as
dt = (A cos u + B sin u) ds,
t - tA = ~
1
( A sin u - B cos u) ;
(6.7)
(6.8)
the constant of integration being tA.
T h e r e will be no loss of generality if we m a k e a translation in time in such a
w a y that u = 0 w h e n t = tA. This requires that the a b o v e constant of integration
NOTES ON THE CENTRAL
FORCE
rn
45
B be zero. The equation
d r = ~ / - 2 T (B cos u - A sin u)
ds
(6.9)
also shows that if B = O, d r / d s is zero at U = 0 and r has thus an e x t r e m u m
rA = A . Equations (6.5) and (6.8) take on a more elegant f o r m with the new
choice of constants: namely,
r = rA COS U,
(6.10)
-tA)
(6.11)
n(t
sin u,
=
where the so-called m e a n m o t i o n
(6.12)
n = N/~2E/rA
has b e e n defined. The time tA is the instant of m a x i m u m distance (or apoapsis)
r=rA.
Equations (6.10) and (6.11) allow us to obtain a r e m a r k a b l e expression for r 2
as a function of time in the f o r m
r 2 = r~ [1 - n Z ( T - TA)2],
(6.13)
which is consistent with the previously discovered Equation (6.2) for r 2. This
equation shows again that the motion is real only during the time interval
tA
ra
<~ t <~ t +
ra
-v -E '
(6.14)
and that this motion is s y m m e t r i c with respect to the apoapsis r = ra. The two
e x t r e m u m points both c o r r e s p o n d to r = 0.
Inspection of Equation (6.10) for the positive quantity r also shows immediately that the motion is restricted to the interval
II
II
- ~ - ~< u ~< + ~ - .
(6.15)
Substitution of these limits in (6.11) shows that
- 1 <~ n ( t
-
ta) ~ + 1
,
(6.16)
which is equivalent to the conditions (6.14).
In order to describe the polar angle 0 as a function of the time t, it is natural to
start f r o m the angular m o m e n t u m equation
zd0
r20 = r -d-{ = C .
(6.17)
The solution can be obtained immediately if we again substitute dt = r ds. We
then obtain, with the use of (6.10),
dO=
Cdu
RA~/-2E
cos u '
(6.18)
46
R. B R O U C K E
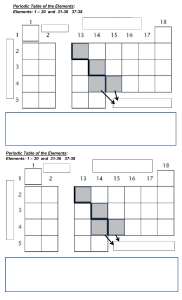
Fig. 2. Spiral solution in the inverse cube force problem.
which integrates into one of the three forms
0
C____ In tan II + u_,
r A ~
4 2
O -- ra~ - 0
(6.19a)
ln ~/l1 -+ sin
u
sin u '
(6.19b)
C
raN/-S-2-~gd -~ u,
(6.19c)
where the symbol gd is used for the well-known Gudermannian function. In the
above three formulas we have neglected a constant of integration 00 which
would have the only effect of rotating the orbits by a fixed angle. The solution
for 0 also shows that this angle varies all the way from - ~ to +o0 when u
describes its allowable interval of 180 degrees. Because of this the motion in the
(r, 0)-plane will appear as a spiral around the origin r = 0 at both ends (see
Figure 2).
The form of the orbit is completely determined by two initial conditions: ra
(the initial value of the radius vector) and the corresponding velocity VA
perpendicular to it. The energy E and angular momentum C are related to these
initial conditions by
2
r~
and
C = VArA
(6.20)
if we assume that VA and C both have the same sign.
7. S o m e E x a m p l e s
of Periodic Solutions
In this section we return to the general problem with an attractive force - r " . We
want to illustrate here the importance of the stability curve (Figure 1) of a family
of singular periodic solutions of an integrable dynamical system. The theory of
bifurcations of periodic solutions is completely applicable here in the same way
as in the non-integrable systems. This theory can in fact be used to predict the
location and number of revolutions of new families of ordinary periodic solutions (see Whittaker, 1959; pp. 395 and 406).
NOTES ON T H E C E N T R A L F O R C E
f n
47
It is known that if the stability index of a stable circular solution is represented b y k = k~ = h + 1/h = 2 cos/3, the stability index of the same circular solution, traveled p times, will be kp = h p + h -p = 2 cos p/3. A bifurcation with a new
family of non-circular periodic solutions is possible whenever kp = +2 or h p = 1;
in other words whenever cos p/3 = + 1 - for instance, when/3 = 360 ~ 180~ 120 ~ or
90 ~ This corresponds to k~ = k = +2, - 2 , - 1 or 0. In order to illustrate the
theory, we made a numerical verification for nine different cases, corresponding
to the above four values of k. The corresponding values of the exponent of the
force, n = m - 1 , are computed with the use of (4.11). For k = - 2 we have
n = - 9 and --], which are bifurcation points with a double period. For k = - 1
we have bifurcations to families of periodic solutions with a triple period. We
computed the families corresponding to four cases. Equation (4.11) gives n =
(343)2-3, with 3'--1, 2, 4 and 5, giving n = - 2 . 8 8 8 g , -2,5556, -1.2222 and
-0.2222. Finally, in the case k = 0, we have bifurcations with families of periodic
orbits with quadruple period; the exponent n given by (4.11) is here (1+
27)~/16 3 with y an integer, For 3' = 0, 1, 2 we find n = -2.9375, -2.4375 and
- 1.4375.
In all nine cases it was verified numerically that the families of periodic orbits
exist, with the period as predicted by the bifurcation theory. For each family
about twenty-five periodic orbits were computed. Each family starts with
x0 = 1.0 and Y0 = 1.0 (the circular orbit). The value of x0 is kept constant to fix the
scale factor present in the problem. The initial value Y0 is then decreased in
about twenty-five steps down to 0.80 and the exponent n is adjusted in order to
achieve periodicity. These initial conditions are shown in Figure 3 for all nine
families, The stability curve k is repeated on this figure in order to show the
correspondence, in Figure 4 we show six typical non-periodic solutions with
initial conditions xo = 1.0, Y0 = 0.8, belonging to the families 1, 2, 3, 4, 5 and 7,
The corresponding values of the exponent n are given in the figure. The present
results have all been obtained with the aid of numerical integrations, but it is
clear that most of the properties of these periodic solutions could be derived
from the theory of elliptic integrals and Jacobi's elliptic functions.
The present non-circular periodic solutions are the ordinary type of periodic
solutions and are therefore expected to have all zero characteristic exponents, In
order to verify this property we computed the stability of these solutions with
several different methods, all based on numerical integrations, The principai
method that we use to obtain the stability information is the construction of the
m o n o d r o m y matrix, R, via solutions of the variational equations. It is found that
the m o n o d r o m y matrix R has the general form
R
1 0 0 0
a 1 0 /3
3,0
1 8
00
0 1
48
R. B R O U C K E
J
1
\
I
2
J
/
i
i
J
I
0
&
I
I
\
_~
~I
_
~r
o
~
~-
~
~f
~i
~E
~
~
~
'
0
bZ
-"
6
6
_
o
6.
6
,
~
.~
~
o
,o
_o ~
o
~
~ . oo
~.
o,
49
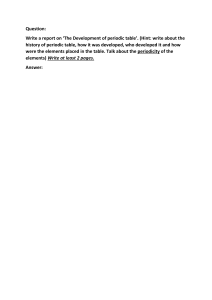
N O T E S ON T H E C E N T R A L F O R C E r"
~
(3
1.0 x
)
~
~
(7)
'y n=-2.525034
(4)
1.0
x
y n=-I.2357667
Y
i
- - ~ 1 . 0
F i g . 4.
X
'
~
o
.0X
Some typical periodic solutions in the central force problem.
where ~6 - f l y ~ O. The four eignevalues are +1 and the rank of R - I is 2.
In another method of stability calculations we construct the H6non matrix
with H 6 n o n ' s theory of isoenergetic surfaces of section (H6non, 1965). For the
present integrable problem, the H 6 n o n matrix has the general form
H=
0
1
"
50
R, B R O U C K E
The H6non matrix can also be constructed in terms of the elements of the
(4 x 4)-monodromy matrix with the formulas given by Contopoulos (1970, p. 111)
or by Markellos (1976). In the present problem, which has s y m m e t r y with
respect to the x-axis, we also computed the G u y o t matrix (H6non and Guyot,
1970) with half-revolution orbits. The G u y o t matrix has, in this instance, the
form
o:E ~
with det G = A D = 1. The exact relationship between the H4non and the G u y o t
matrices are given in H6non and Guyot (1970, p. 352).
Another method for computing the stability of these periodic orbits is to
construct the H6non or the G u y o t matrix by numerical integration of Hill's
equation (Deprit and Henrard, 1967) for the normal deviation n, given by
ii +On = 0 ,
where the factor 0, corresponding to equations of motion Y = Ux, Y =- Uy, is given
by
0 = 3~ 2 - (U~x92 + S y y x 2 - 2 U x y . ~ f c ) / V 2 ,
where V is the magnitude of the velocity and 4~ its direction. In the case of
symmetric periodic solutions, intersecting the x-axis at right angle at t = T]2 and
t = T, a numerical integration with an identity matrix as initial values, gives the
G u y o t matrix at t = T[2 and the H 6 n o n matrix at t = T.
All five stability methods were applied to our periodic solutions and all lead to
the same principal conclusion: all four characteristic exponents of the orbits are
zero.
8. The Analogy with the Two-Fixed Center Problem
We shall indicate here the existence of a family of ellipses in
problem of two fixed centers, which are singular orbits and
considered as generalizations of the circular orbits which are the
of the Kepler problem.
The problem of two fixed centers (Charlier, 1902; Deprit,
equations of motion
X
the integrable
which can be
singular orbits
1960) has the
X--C
5~ = - m l ~ - m 2
r3 ,
Y
Y
The force is the Newtonian attraction by the two masses mr(0, 0) and m2(c, 0).
The problem has, of course, the energy integral
I.
2
2~
N O T E S ON T H E C E N T R A L F O R C E r"
51
but it also has the so-called Euler integral (Whittaker, 1959; p. 283), which can be
written in rectangular coordinates (Lagerstrom and K e v o r k i a n , 1963) as
X
1~12 + C m l -r!- -
X--C
cm2
= C.
F2
It is also well known (Deprit, 1960, p. 73; Oertel and Singer, 1960) that the
problem has a family of periodic solutions which are ellipses
(x - c/2) 2
y2
x a 2 _ (c/2)2
a2
1,
with semi-major axis equal to
m2)
(ml --
a-
2E
In the limiting case where c tends to zero, we find the circular solutions of the
Kepler problem with total mass ml + m 2 . Deprit (1960) already showed that the
ellipses are singular solutions of the two-fixed-center problem. We m a d e a
numerical verification of this fact b y computing the m o n o d r o m y matrix R and
the characteristic exponents of the ellipses. We find that the m o n o d r o m y matrix
has the expected two unit eigenvalues, with rank (R - I ) = 3. It has the general
form
R
=
f ab eil
c
h
-i
d
i
-f
j
-b
g
a
"
All the orbits are stable, as is seen in the stability diagram (Figure 5). The
diagram corresponds to two equal masses ml = m2 = 89located on the x-axis at
+-I.
We note a remarkable point on this diagram where the stability index k is
tangent to the value - 2 , at the periodic orbit with initial conditions x0 = +0.610,
~0 = 2.885. Exactly as in the central force problem, we verified that this is
actually the beginning of a new branch of ordinary periodic solutions with t w i c e
the period of the ellipses. The double-period orbits resemble the first orbit
(n = -2.702) given in Figure 4. M a n y other bifurcations of multiple period orbits
are expected to branch out of the singular family of stable ellipses. Both
p r o b l e m s - t h e central forces r" and the two fixed-center p r o b l e m - c l e a r l y
illustrate how the linearly stable singular periodic orbits are the real ' b a c k b o n e '
of m a n y other branches of periodic orbits.
The m o n o d r o m y matrix of the particular elliptic orbit with k - - - 2 is of the
form
R=
c
h
-i
-a
i
j
-f
a
-b
-a
'
52
R.
BROUCKE
k
2-
/
.I..2
I
I
.5
I
.4
I"
.5
.6
.7
I
I
t
.8 /
I
t
~
1
2
Xo
-2
Fig. 5. Stability index of the elliptic orbits in the two-fixed center problem.
w i t h e i g e n v a l u e s + 1 , + 1 , - 1 , - 1 a n d r a n k (R - I ) =
-=1'o
3. T h e H 6 n o n m a t r i x is
o
w h e r e t h e u p p e r right e l e m e n t is k n o w n to b e i d e n t i c a l w i t h t h e e l e m e n t (1, 3) o f
t h e m a t r i x R, b o t h b e i n g z e r o in t h e p r e s e n t c a s e ( C o n t o p o u l o s , 1970).
References
Aksnes, K.: 1970, Astron. 3". 1066.
Charlier, C. L.: 1902, Die Mechanik des Himmels, Leipzig, Verlag non Veit.
Contopoulos, G.: 1970, Astron. J. 75, 108.
Danby, J. M. A.: t970, Fundamentals of Celestial Mechanics, MacMillan Company, New York.
Deprit, A.: 1960, in Mathematiques du 20~me sidcle, Vol. 1, Dept of National Education, Brussels, p.
45.
Deprit, A. and Henrard, J.: 1967, Astron. J. 72, 158.
Garfinkel, B.: 1959, Astron. J. 64, 353.
Goldstein, H.: 1957, Classical Mechanics, Addison-Wesley Publishing Company, Reading, Mass.
NOTES ON THE CENTRAL FORCE r n
53
H6non, M.: 1965, Ann. d'Astrophys. 28, 992.
H6non, M. and Guyot, M.: 1970, in G.E.O. Giacaglia (ed.), Periodic Orbits, Stability and
Resonances, Reidel Publ. Co., Dordrecht, p. 349.
Lagerstrom, P. A. and Kevorkian, J.: 1963, Astron. J. 68, 84.
Legendre, A. M.: 1825, Trait~ sur les Fonctions elliptiques.
Losco, L.: 1977, Celest. Mech. 15, 477.
Markellos, V. V.: 1976, Astrophys. Space Sci., 43, 449.
McCuskey, S. W.: 1963, Introduction to Celestial Mechanics, Addison-Wesley Publishing Company,
Reading, Mass.
Moulton, F. R.: 1914, An Introduction to Celestial Mechanics, The Macmillan Company, New York.
Newton, I.: 1686, Philisophiae Naturalis Principia Mathematica, Vol. l (Molte's translation,
University of California Press, Berkeley and Los Angeles, 1966).
Nobile: 1908, Giomale di Mat. 46, 313.
Oertel, G. K. and Singer, S. F.: 1960, Astron. Acta 5, 356.
Pars, L. A.: 1965, A Treatise on Analytical Dynamics, tohn Wiley and Sons, New York.
Stader, J. F.: 1853, Jr. reine angew. Math. 46, 262.
Sterne, T. E.: 1962, An Introduction to Celestial Mechanics, Interscience Tracts on Physics and
Astronomy, No. 9, Interscience Publishers, New York, p. 127.
Vinti, J. P.: 1969, Astron. J. 74, 25.
Whittaker, E. T.: 1959, Analytical Dynamics of Particles, Cambridge University Press, Cambridge.
Whittaker, E. T, and Watson, G. N.: 1965, A Course of Modem Analysis, Cambridge
University Press, Cambridge.