Damped Harmonic Oscillator: Displacement, Velocity, Energy
advertisement

See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/250891631
Under-damped harmonic oscillator with large damping: Displacement,
velocity, acceleration and energy
Article in International Journal of Mathematical Education · September 1997
DOI: 10.1080/0020739970280510
CITATIONS
READS
4
2,194
1 author:
Pushpendra K. Jain
University of Botswana
158 PUBLICATIONS 468 CITATIONS
SEE PROFILE
Some of the authors of this publication are also working on these related projects:
Influence of Ru additions on the hardness and densification of WC-VC-Co alloys View project
African Materials Science and Engineering Network, University of Botswana Node. View project
All content following this page was uploaded by Pushpendra K. Jain on 06 October 2015.
The user has requested enhancement of the downloaded file.
rNT. J. MATH. EDUC.scr. TECHNoL.,7997, vol-. 28, No. 5, 735-748
Under-darnped harrnonic oscillator with large darnping:
displacernent, velocity, acceleration and energy
by PUSHPENDRA K. JAIN
Department of Physics, University of Botswana, P Bag 0022, Gaborone, Botswana
(Receiaed10 Nooember 1995)
The damped simple harmonic motion of an oscillator is analysed, and its
instantaneous displacement, velocity and acceleration are represented gr.aphically by the projection of a rotating radius vector of reducing magnitude on to the
diameter of a circle. The effect of damping on velocity, acceleration and energy
are analysed and discussedin terms of a phase angle. The instantaneous energy
of the oscillator is not a pure exponential decay function of time; rather it is
given by an exponential decay function with a 'ripple' superimposed on it.
However, the energy decay per oscillation is exponential irrespective of the
magnitude of damping.
1. Introduction
The free vibrations of a simple harmonic motion die out gradually due to
dissipation of energy as work is done against the damping force. For a mechanical
oscillator of mass ?r, spring constant k, and velocity-dependent damping force
(-)bo, the equation of motion is
d2x
'v d.x
arr+iar*wfix:o
(1)
: (hlm)t/2 is the natural
where (.y12): (blm) is the damping coefficient,and c..rs
frequency of the oscillator. The displacement r(t) depends on the magnitude of
damping. There are three distinct possibilities that arise in obtaining solutions to
equation (1), namely aA > 021q, wf,: (1214), and,wf, < (.y'19. These give rise to
under-damped and critically damped oscillations, and over-damped motion,
respectively. We are interested in the under-damped case for which the general
solution of equation (1) is:
c((t): Asexp (-ltl2) sin (u.,r
* 0)
(2)
where As and 0 are the maximum amplitude and the initial phase angle,
respectively, which are determined from the initial conditions. Clearly, from
equation (2) the_resulting motion is oscillatory, periodic, with angular frequency
u: (a?,-.y2 l4)r/z and with exponentially decreasingamplitude [1, 2]. For small
damping, 'yl2<rr.rs, the energy of the system also decays exponentially [2], and is
given by:
: +kA|exp(-7r)
E(t) : |ne1t12
(3)
In this article we introduce a graphical representation of the damped oscillatory
motion in terms of the projection of a uniformly rotating radius vector of
exponentially decreasing magnitude on to the diameter of a circle. Although a
0020-739X197 $12 00 O 1997 Taylor & Francis Ltd
P. K. Jain
736
graphical representation of undamped simple harmonic motion is found in the
literature [3], it has not been applied to the caseof damped motion. The graphical
representation facilitates visual understanding of the motion. The effect of damping on the motion is clearly presented as a continual decreasein the instantaneous
amplitude of the motion given by the exponentially decreasing radius vector. The
displacement and velocity are related to each other through a damping-dependent
phase angle, a physical interpretation of which is possible only from the graphical
presentation of the motion. The effect of large damping on velocity, acceleration
and energy is analysed as (1 12) approachesc,.re.
The energy of a damped oscillator is commonly believed to decay exponentially. In this article it is shown that the instantaneous energy of a damped
oscillator is not really given by a pure exponential function; rather it is given by
the product of an exponential function and an oscillatory function. The exponential decay law for energy can be applied only for three cases: (i) For successive
positions of maximum displacements; (ii) for successivepositions of zero displacements; and (iii) for complete cycles of oscillations.
2. Displacement
Let us consider a specific caseof initial conditions obtained by setting the initial
phase angle 0: 0 in equation (2). This corresponds to the initial condition:
by applying an
x(r : 0) : 0, and the oscillator is given an initial velocity at t:0
impulse. The displacement of the oscillator then becomes:
*(t) : As exp (ltlz)
sin (o-,1): eU) sin (art)
(4)
and the zeros of
T h e d i s p l a c e m e n ti s z e r o f o r u t : n l r ,
where n:0,1.,2,...,
displacement are equally spaced by A(c.;l) : zr. Because of the exponential time
dependenceof the amplitude, the displacement is not maximum for sin (ar4 : 1 as
one may expect. The maxima of the oscillatory motion are obtained by setting the
first derivative of displacement at the turning points equal to zero. From equation
(4) we get:
#
: Ae)ucos
(at)+ ff
"i^1,r7
: eQ)lo"o,
(c,,'r)
l.i" 1"4]
(s)
g i v e s t h e l o c a t i o n o f m a x i m a a s iu t : { n t r * t a n - l ( Z r l l ) } :
and {dx(t)ldr}:0
(nn + d).The correspondingmaximum displacementsare:
xmax: *le
exp {-Qlza)(mr
+ {)} sin ($) : +As(uf us) exp {-Ql2a)(nn
+ d)}.
The successivemaxima of displacement are also equally spaced by A(u.'t) : zr but
they are not half way between the zero displacements as is the case for an
undamped simple harmonic motion [2]. For very small damping as 1f2-0,
d - rl2, and as the damping increases@decreases,approaching zero as 1f 2 - ws
in the limiting caseof critical damping. Thus, besidesthe exponentially decreasing
amplitude, the effect of damping is the angular shift of the maximum of motion
towards the zero displacement just proceeding it, as compared to the case of
undamped motion for which the successivemaximum and zero displacements are
equally spacedby a phase anglerf 2.
737
Damped SHM
.r(/):0
r(/):0
Figure 1.
A rotating radius vector diagram for the displacementof an under-damped
oscillatorymotion.
Consider now, an exponentially decreasingradius vector A(t) : As exp (ltl2)
rotating clockwise about the origin with a uniform angular frequency c,.'.The
displacement of the damped harmonic oscillator at time I is then given by the
projection of A(t) on to the x-axis (Figure 1) in the same way as an undamped
simple harmonic motion is given by the projection of a uniformly rotating radius
vector of constant length on to a diameter of the circle described by the tip of
the radius vector [3]. In the case that the initial phase angle d 10, it is simply
added to the angular displacement ut of the radius vector to obtain the displacement of the oscillator at time l. Figure 1 also shows the phase relationship (angle
d) between the successivemaximum and zero disolacements.
3. Velocity
The instantaneous velocity of the oscillator is given by equation (5). The term,
A(t)a cos(art), in equation (5), besides being proportional to A(t)w, is out of phase
by rl2 from the displacement. In this respect this term is similar to the velocity of
an undamped oscillator. At zero displacement since ut: n'n, this is the only term
which contributes to velocitv. Thus:
for r(t)
ry= AQ)wcos(wt)
--+ 0
(6)
On the rotating radius vector diagram (Figure 2) this term is represented by a
P. K. Jain
738
(dx(t)tdt)
Figure 2.
Rotating radius vector diagram to represent the velocity of an under-damped
harmonic oscillator.
component A(t)w of the velocity of the tip of the radius vector normal to it, and its
projection along the r-axis is A(t)wcos(wt).
The term, {dA(t) ldt} sin (cut),gives the contribution to velocity due to the rate
of change of amplitude. As the energy of the oscillator is dissipated due to
damping, the amplitude of the oscillator decreasesand the rate of change of
amplitude contributes to the velocity of a damped oscillator. For very small
damping (ll2<c,,'s) the rate of dissipation of energy and the associatedrate of
change of amplitude are very small, and the velocity can again be approximated by
equation (6).
On the rotating radius vector diagram (Figure 2) the second term in equation
(5) is represented by the component (1 l2)A(t) of the velocity of the tip of the
radius vector parallel to it and directed towards the origin. Its projection along
the x-axis is (1 l2)A(l) sin(c..'t)which is proportional to the displacement. As the
damping increases,the contribution of this term to the velocity increase and the
oscillations die out at a faster rate.
Both the terms in equation (5) can be combined into a single expression in
terms of a phaseangle a if we set o:Dcos a and 112: Dsina, where D2:
(w2+ f l\ : aB and tancr: (t12").This gives:
dx(t)
dt
For very small damping 612 -
: A(t)uocos (cut* o)
(7)
0), a = 0, and equation (7) gives the velocity of an
DampedSHM
739
undamped simple harmonic oscillator. For large damping as 112 ---+tto, ot n rf 2
and. a --+ 0. This implies that in the critical damping case the displacement
gradually reduces to zero without oscillations, and the velocity is in phase with
the displacement and it is not zero as is the case of an oscillatory motion at
maximum displacement.
The role of the phase angle a in equation (7) must be understood and
interpreted carefully. o is not really a phase angle in the physical sense of an
angular phase lead or lag of velocity from the displacement, rather it is a
mathematical model to represent the effect of damping on the rate of dissipation
of energy and the rate of change of amplitude. o is related to the angular position of
the maxima of displacement by: e: (T12 - @).Thus the phase angle o in equation
(7) gives the angular position of the maxima of the damped oscillator measured
from the maxima of the corresponding undamped oscillator (Figure 2). On the
rotating vector diagram (Figure 2) equation (7) is shown by the tangential velocity
at: A(t)uo of the tip of the radius vector and its projection along the r-axis is
A(t)uscos (ot * o).
4. Acceleration
Acceleration of the damped simple harmonic oscillator is given by
#:
--,,o(r)cos
(,t)- (u -t)"(r) sin(o,,r)
- 1wA(t) cos (tut) -
(u-T).
(8)
Once again there are two contributions to the acceleration. The displacementdependent component of the acceleration is (-)(o/ -.y2 l4)x. On the rotating
radius vector diagram (Figure 3) it is represented by a radial acceleration
(w2 -f l\e(r)
parallel to A(t) and directed towards the origin so that its
projection on to the e-axis is proportional and opposite to the displacement *(r).
For very small dampineOl2 --+0) this component reducesto (-)wzx-- (-)wf;x,
the same as for an undamped simple harmonic oscillator.
The second component, (-)1uA(t) cos (c.,,t)on the rotating radius vector
diagram (Figure 3) is given by an acceleration 1aA(t) perpendicular to A(t). Its
projection onto the r-axis is (-)pA(t)
cos (a.,t)and it vanishes as 1f 2 -* 0. Close
to maximum displacement cos (cur)is very small and the contribution of this term
can again be neglected. Thus, for small damping and close to maximum displacement the acceleration can be approximatedby (-)uzx. In fact at the maximum
displacement as the velocity becomes zero, the damping force vanishes and the
acceleration then is: (-)r3*^*.
At zero displacement the r(t) dependent acceleration is zero and the velocity
reaches its maximum. As a result the damping force and corresponding acceleration are maximum. Thus for a damped harmonic oscillator the acceleration is not
zero at zero displacement as in the caseof an undamped oscillator, and x(l) : Q;g
not the dynamic-equilibrium position of a damped oscillator [2].
The two parallel and perpendicular components of acceleration of the tip of
A(t) can be resolved into the tangential and normal components a1 and a, along
.740
P. K. Jain
(d2x(t) t dt2)
Figure 3.
Representation of the acceleration of an under-damped harmonic oscillator by a
rotating radius vector diagram.
the tangentt and normal fi, respectively,to the trajectory(Figure 3). They are:
a,: -A(t)w2 sino -*ofrlsin
4"
a,:
-A(t)w2
o - 1wA(t)coso: -*rr,
.
(g)
- 1wA(t)sino: -A(t)aus
**efrlcose
+
"o.o
2 : () A(t)a!. F or
From equation (9) (aif a^l : Q I 2w): tar-e, anda : 1"1+
"?^1U
very small damping as 112 --+0, we have a --+0, e --- ao, A(t) + Ao and at --+0.
Thus for zerodampingd: &n: (-)A(t)al actingalongthe radiusvectorwhich is
the same as for an undamped
harmonic
oscillator.
5. Energy
The total instantaneous energy of the oscillator is given by the sum of its
instantaneous kinetic and potential energies, and can be obtained from any of the
equations (5) or (7) for velocity and equation (4) for the displacement. Thus:
E(t):tu(#)'+1n*1,1,
(10)
:lne(12(cosz(ort+a)+ stn2(tur))
For small damping (.y12< uo), o --+0, and equation (10) reduces to equation (3).
7+1
Damped SHM
a=nl4
o = 0.5s''
Y=1.0s'
0.9
o.7
0.6
r.1'
Po.u
0.4
0.3
o.2
0.1
o
Figure
4.
0.2
Normalized
0-4
0-6
0.8
1
1.2
1'4
1.6
'l'8
2
(or(radians)
energy of an under-damped
harmonic
oscillator
as a function
of u.rl.
For the initial conditionsunder discussionthe total energyaI t:0 is kinetic,
:1t1Z\nef,cosza, so that equation(10)
i.e.E(t- 0) : Es: (112)m(lsarscoso)'
for energycan be expressedas:
E(t) :ro-]
, "*p (-'vr)(cos2 (wt * a)sin2 (4.'r))
(11)
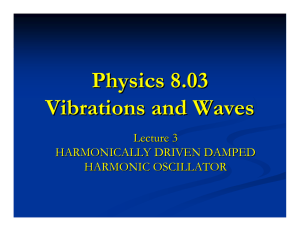
Equation (11) gives an exponential decay of energy with a superimposed ripple due
to the oscillatory sinusoidal functions of c,,rland a, and not a smooth exponential
decay as suggestedby equation (3). Figure 4 shows E(t) lEo as a function of ut fot
o : i r l 4 , u , , : 0 ' 5 s - 1 a n d c o r r e s p o n d i n g l y? : 1 s - r .
-l
At the zero displacement (ut: nr) and maximum displacement (ut: ntr d)
which is an exponential decay
positions equation (11) gives E(t):.Esexp(-7t)
(3).
it
is to be noted that Es is the
However,
to
equation
law for energy similar
present
case is Eo : (l lz)kAf, cosza
for
the
which
initial energy of the oscillator
(3).
of damping, the energy of
for
all
values
Thus,
and not (1 l2)kAl as in equation
minima decays
two
successive
the oscillator between two successivemaxima and
oscillations
successive
exponentially. If E"+r and En is the energy for two
by
a factor of
then En+r/En: exp(-2r'yla). The energy decays
(Lt:2rla),
exp (-2tr1f w) over each complete oscillation , and En: Eo exP ?"1:f) where ? is
the period of one oscillation. For all other displacements of the oscillator the
instantaneous energy depends on both ut and o as given by equation (11).
The total energy is also related to the initial energy Es at t: 0 and the work
done (WD) against the damping force, i.e'
7+2
P. K. Jain
E(t): Es- (WD)g-.:
:Eo
-
no-
a*
louo
(r2)
fom'a,
From equation (12) the rate of change of energy is:
dE(r)
, 2-
-uu
d(WD)
( 13 )
---------
dt
dt
Using equation (10) for the total energy one can explicitly obtain equation (13)
mathematically. More importantly, equation (13) shows that the rate of change of
energy is zero at the turning points of oscillations and is maximum at zero
displacement. Therefore, the graph of E(t) against time has a varying slope as
the oscillator passespoints of maximum and zero displacements in the course of its
oscillations. The graph is horizontally parallel to the time axis (zero slope) at the
maximum displacement, and is steep with a large slope at the zero displacement
positions. Figures 5 (a, b, and c) show the energy of a heavily damped harmonic
so
o s c i l l a t o r f o r d i f f e r e n t r e g i o nosf u t f o r t h e c a s ea : r 1 4 , r , . ' : 0 ' 5 S - 1 , ? : 1 s - l
that $ : Tl+.The graphs (i) are for E(t) lEg as given by equation (11) and graphs
(ii) are the pure exponential decay graphs. The following features of energy are
clearly displayed by these figures.
(i) E(t)lEs graph is an exponential decay graph with a superimposed,ripple.
(ii) At wt:0,
(2r+4)...
the E(t)lEy graph crosses
d, r, (tr*Q),2r,
the exponential graph. Thus, at the points of maximum and zero displacements the energy decay is exponential. This feature of energy is
a= n/4
rrl= 0.5s-1
Y = 1 . 0s - '
0 =nl4
rS
r!
,^
't.5
2
rrl/(radians)
Figure 5(a)
743
DampedSHM
\
3.6
3.8
4
col(radians)
Figure 5(b)
r-i
E z's
a: rl4
<o: 0.5 s-t
? = 1.0sn
6=tl4
6'
ul
o
;o 1 . s
E
E
2r
I
0'5
s.6
5.8
6
6.2
6.4
6.6
co/(radians)
Qr+Q)
I
6.8
7
7.2
Figure 5(c)
Figure 5. Normalized energy of a heavily under-damped oscillator (graphs i) as compared
to the exponential energy decay (graphs e7)of the lightly damped case. Figures (a),
(b), and (c) display the different regions of art.
P. K. Jain
744
consistent with the features of energy of an undamped oscillator as
discussedbelow.
At zero and maximum displacements the total energy is kinetic or
potential, respectively. In going from the position of a maximurn or a zero
displacement to the next corresponding position, the phase angle changes
by n'so that the cosine and sine functions in the expressionsfor the kinetic
and potential energies, respectively, return to the same value. Therefore,
from the ratio of energy at zeros or maxima the angular functions cancel
out. Since the amplitude of the damped motion is exponentially timedependent the energy decay at these points results in an exponential
function. However, between the successivemaximum and zero positions
the phase change is (trl2 * o) so that the energy ratio between these points
is not smooth-exponential. At the intermediate positions also, due to nonconservation of energy of the oscillator, the kinetic and potential energy
terms do not add up to a smooth exponential function resulting in a
rippled-exponentialdecay of energy.
(iii) Over a complete oscillation the phase changesby 2r, and the energy decay
over complete cycles of oscillations is also exponential. This exponential
decay law for energy over complete oscillations can be applied to
oscillations starting at any initial phase.
(iv) At ,t:d,
("+d), Qr+il...
t h e s l o p eo f t h e E ( t ) l E s g r a p h i s z e r o s o
that the rate of change of energy at points of maximum displacement is
r , 2 r , . . . t h e s l o p ei s s t e e pa n d t h e r a t e o f c h a n g eo f e n e r g y
z e r o .A t a t : 0 ,
at zero displacement positions is large. The change in slope of the energy
position is
graph at the first maximum displacement (wt: d:"1+)
clearly seen in Figure 4 also.
(v) Since the rippled-exponential energy graph for the heavily damped
oscillator crosses the smooth exponential graph at zeros and maxima of
displacement, the ripple has twice the frequency of the oscillator. Because
the maxima do not lie half way between the zeros, the ripple is not
symmetrical. Figure 6 shows the oscillatory ripple function:
[{cos2(u.,r+ a) + sin2(ut)} lcos2 a]
for a:
r l 4 a n d u . r : 0 . 5s - 1 .
6. Critically darnped motion
For critically damped motion (l l2 : u.rs)the general solution of the equation of
motion is given as:
x(t) : (F + Gt) exp(1t12) : (r. + Gr) exp (-rot)
(14)
where F and G are constants determined from the initial conditions. We consider
two simple casesof critically damped motion.
Case I. The system is given an initial velocity z6 by applying an impulse at
I : 0 and r : 0. The system reachesa maximum displacement xo at t: l0 and then
relaxes back to zero displacement (Figure 7(a), graph i). The displacement,
7+5
DarnpedSHM
o
2:5
a
t
i.
2
+
+
1.5
o
o
1
/
\
\
(r+d)
I
2r
jl
).r,
01234s678910
cor(radians)
Figure 6.
The ripple function [{cos2(r.rr+ o) + sin2(art)}/ cos2o] for a:
0'5 s-t for a heavilydampedoscillator.
rl4 and t.r:
velocity and energy are given by
x : ztotexp (-ltlZ)
-l')
ff: *(t
"r?ttlz)
E(t):fu4(t.+- r) "*p1-r4
:
(1s)
.ry- 7r).*p(-7r)
"o(t
The maximum displacement is reached at to:211
xs: {(2vs)h}exp(-l)
so that x(t) :rcoexp (l - yl2),
and has a value
and corresponding
{A1t: zlt) lao} : e*p(-2).
Case II. The system is given an initial displacement tc: tcoat t:0
(Figure
7(b), graph ii). The corresponding displacement, velocity and energy are:
/
n\
r : xo (1 exv ?ltl2)
,t)
d,x
o:
xo.yz
,
_-:f
texp(_ttl2)
: iu\(t .ry+ r) 1-74
E(t)
"*p
: uo(t .ry+ 7r) (-7u)
""p
(16)
746
P. K. Jain
/t\
(a): Case- I
l\
r\
t\
t\
t\
\
t\
a
^
E(t)/dt):0
f{)
II
I
I
Y
trl
nnt
yilz
P
^t
)<
l{
(ii) x(t)lxo
rq
yt/2
Figure 7. Normalized displacements(graphs i and iii) and normalized energy (graphs e7
and ia) for two casesof a criticallydampedmotion. (a) x :0 and o : ao at I : 0, and
(b)":)co^r,dla:0att:0.
In all the expressionsgiven by equations (15) and (16) 112 can be replaced by ro,
the natural frequency of the system.
In both cases(dE(r) latS: -baz as given by equation (13). In Figures 7(a) and
7(b) the graphs (iii) and (io) show (Z(t)lns) for the two cases, respectively. In
Case I there is clearly a turning point at *(t) : rcowhen the velocity is zero at
maximum displacement. For case II the decay of energy is smooth exponential. It
is also interesting to note from the graphs for E(t) lEs for the two cases that the
energy decays at a much faster rate in Case I than in Case II. In Case I the system
starts off with the maximum velocity as at t: 0. This results in a large dissipation
of energy due to initially large velocity-dependent damping force. In Case II the
system has zero initial velocity and its total energy is potential at t: 0. As the
system relaxes back to zero displacement, part of the loss in its potential energy is
DampedSHM
7+7
dissipated and part of it is changed to kinetic energy. Thus the change in its
is very slow and gradual as can also be seen from the
velocity from zero at t:0
exponential term in the expression for velocity in equation (16). Consequently the
damping force and the rate of dissipation of energy in Case II stays small.
7. Conclusions and discussion
A graphical approach to represent an under-damped harmonic oscillator by a
uniformly rotating radius vector of decreasingamplitude is introduced for the first
time. The displacement, velocity and acceleration of the oscillator with damping
force proportional to velocity are discussed with reference to the graphical
representation for the case,x(t) : 0 at t:0,
and the effect of damping on energy
is analysed. The method can be extended to any set of initial conditions. For
example, the case for which the displacement is expressed as x(t):
Asexp(-ltlz)
cos (cur),the energy relation correspondingto equation (11) is
E(t) :ro;;P
$in2 (at+ o) cos2(orr))
tr+srn-a)
(17)
where Eo : (ll})kAAQ + sinzo).
The effect of damping on velocity is expressedin terms of a phase angle which
gives an angular shift of the maximum displacement relative to its position for the
corresponding undamped motion. The velocity phase angle is a mathematical
model to represent damping and it is not a physical phase difference between the
velocity and the displacement.
For large damping the instantaneous energy depends on the damping parameter and the decay of instantaneous energy is not a smooth exponential function
of time as approximated for small damping. Rather it has a ripple superimposed on
the exponential function because of the variation in the rates of dissipation of
energy as the oscillator passes through the positions of maximum and zero
displacements. However, the decay of total energy from a zero to zero position,
maximum to maximum and for complete oscillations is exponential irrespective of
the magnitude of damping. This does not apply to decay of energy from a
maximum to zero or vice versa and to any other position of the oscillator. The
oscillatory-exponential behaviour of instantaneous energy as against the smooth
exponential decay could be ofinterest in electrical and electronic circuits and could
have electronic applications. The analysis is extended to the limiting caseof critical
damping. The case of over-damped motion is similar to that of critical damping
except that the corresponding expressions for displacement, velocity, and energy
are mathematically more complex becausethe solution of the equation of motion
involves hyperbolic functions.
Acknowledgrnent
Many useful discussionsand comments from Dr E. M. Lungu, Department of
Mathematics, tJniversity of Botswana are acknowledged with thanks.
748
Damped SHM
References
[1] Srnrcrr, M. R., 1967, Schaum'sOutlinc Series:Thmry and Problemsof Theoretical
Mechanics(New York: McGraw-Hill).
A. P., 7977, Vibrations and Waaes: MIT Introduttory Physics Ser'i.es
FnuNcn,
[2]
(Middlesex: Tfromas Nelson and Sons).
[3] Anva, A. P., 1979,Introductory CollegePhytics (New York: Macmillan).
r
. D U C .S c t . T E C H \ o L . , 1 9 9 8 , l ' o l - . 2 9 , \ o . 2 , 3 1 5
t\T. J. ]r..\THE
Corrigendum
Under-damped harrnonic oscillator with large darnping:.
displacement, velocity, acceleration and energy
b1' PL SHPENDRAK. JAIN
Departmentof Phr-sics,L nisersitv of Botsrvana,
PrivateBag 0022,Gaborone,Botsrvana
In the above paper, published in Int. J. Math. Educ. Sci. Technol.,?5,735-7+8,
equations (1), (11) and (17) are corrected to read as follo'x-s:
d2r
dx
*2 o:0
x
;, * ti l i
r v h e r e7 :
( 1)
(b/m).
E(t) :ro-f-.tp
cos, o
(-'yr)(cos2(r..,r
+ a) + sin2(r,.,r))
E(t) : E, jY*
(sin2(*'t * a) + cos2(i;t))
( 1 + s i n ' o )'
*i
lxrllr-719\ ,rt !ilJ oil r
View publication stats
.l..rr,r,r
t,r{JX
,\ lrr r,.:. I I,l
(11)
(17)