")
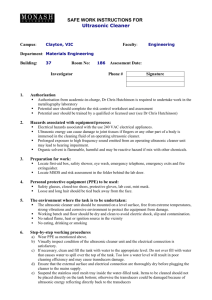
ULTRASONICS VOLUME APRIL-JUNE 1 1963 A PRACTICAL INTRODUCTION ULTRASONIC by ALAN TO CLEANING E. CRAWFORD* Cleaning is probably the commonest use to which ultrasound is put, and one which is being improved continually. This article explains the two most important effects which lie behind ultrasonic cleaning, cavitation and emulsification, and then shows from a practical point of view how cavitation, and hence cleaning, is influenced by the type of transducer and the design of the cleaning tank. Different transducer materials working at different temperatures are considered, and pulsed systems are compared to continuously vibrating ones. A typical power supply is described T HE application of high power ultrasonic energy in industry is of comparatively recent origin. While many of the effects were studied during the immediate pre-war period, it is only in the last decade that some of the promising results have been applied in practice. There are many reasons for this delay, but as in many similar research activities, the transition from the laboratory to the factory floor is far from a simple scaling-up process. Apart from the basic problem of power increases, there are others such as reliability of operation, operator training and practical economics of running costs and capital outlay. Despite the progress made in transducer and generator development, very few of the hundreds of suggested applications have as yet been adopted in production. Of these applications the technique of ultrasonic cleaning is predominant. World sales of specialized ultrasonic equipment for this purpose probably already exceed one million pounds sterling each year, and the process has been accepted for use under the most stringent conditions. THEORY OF OPERATION The removal of soils or adulterants from a solid surface by the use of ultrasonic energy is a complex process, and a number of characteristics play an active part in producing a cleaning action. Any acoustic wave consists of an *Sonics Division, Elliott Bros (London), Ltd. alternating pressure front moving at a defined velocity through a medium. Under normal tank conditions a standing wave develops owing to reflections, and the wavefront is then stationary, but the alternate pressure and rarifaction phase still exists. In most liquids there is a minimum amplitude threshold for a given frequency above which the phenomenon of cavitation occurs. There is also a finite wavelength of the sound wave, dependent on the frequency and the medium in which it is propagated. All these factors influence the cleaning action. It will be realized that the alternating pressure will produce high accelerations in the liquid and this in turn will accelerate to high velocity any suspended particles. The ultrasonic intensity in a free acoustic field can be expressed as z=$ 02 or P = 2/2pcz where Z is the intensity level (ergs/cm2/sec), P the peak sound pressure (dyn/cm2), p the density of the medium (g/cm3) and c the velocity of sound through it (cm/s). In practical figures, with an intensity of 5 W/cm2 in water the peak pressure will be 3.8 x lo6 dyn/cm2 or approximately 3.8 atm. This will always be the minimum value, as in a standing wave condition it must be multiplied by the effective standing wave ratio. With the large number of reflecting surfaces available in a cleaning tank there will invariably be some standing waves. ULTRASONICS/ April-June I963 65 high frequencies are used there is often a considerable hydrodynamic flow of liquid away from the transducer and the standing wave system is generally disturbed. Suspended particles are then kept in continuous motion owing to the overall agitation of the liquid. Early ultrasonic cleaners operated at frequencies above 250 kc/s and were usually energized as continuous wave systems. They were relatively inefficient as cleaners since their action depended entirely on momentum transfer, but some success was achieved in the cleaning of small mechanisms such as watch assemblies. Reports were also made on the cleaning of textile waste and woven fabrics, and this was probably due to the rapid liquid movement through the threads.l Rapid progress in cleaning did not occur until low frequency systems were developed and full advantage was taken of the cavitation effect. High frequency systems continued to be marketed concurrently under the somewhat erroneous belief that there was a better cleaning action on surfaces containing machined cavities of small size, a relationship between wavelength and physical dimensions of the cavity being supposed. At a frequency as high as 1 MC/S, the wavelength in water is still as large as 1a4 mm, and it has been found that cavities with diameters very much less than this are effectively cleaned at low frequencies when cavitation is present. CAVITATION Fig. 1. Focusing effect of a tube segment transducer The maximum acceleration of any suspended particle will be the peak particle acceleration in the beam. This can be expressed as where w is the angular frequency. For 5 W/cm2 at a frequency of 20 kc/s the maximum acceleration is 3.34 x IO6 cm/s2 or 3,400 g. The displacement amplitude is then given by X=w A and at this frequency and intensity the amplitude will be approximately 2.12 X low4cm. With operation at the high-frequency end of the ultrasonic spectrum, these figures change appreciably, particularly the amplitude and acceleration. For 10 W/cm2 in water at a frequency of 1 MC/S, the peak particle acceleration becomes 2.35 x 10s cm/s2 or 240,000 g. Correspondingly, the amplitude decreases to 6 x low6cm. The direct effect of high intensity ultrasonic waves on a contaminated surface in water is to vibrate small particles of the soiling medium by a transfer of momentum from the moving liquid to the particles. The movement will depend on the size of the particles and the frequency; a wavelength appreciably greater than the particle size will excite the particles into oscillation, and larger sizes will move at decreasing amplitudes. The accelerating force is opposed by the particle inertia and thus has less influence on large bodies. Loosely adhering particles on soiled surfaces are therefore removed and remain in suspension adjacent to the surface if a standing wave is present. When relatively 66 uLmsoNrcs/April-June 1963 It is now considered that the primary cleaning effect is caused by cavitation. Under normal circumstances this phenomenon occurs when the peak alternating pressure in the ultrasonic wave exceeds the external atmospheric pressure. The rapid variation in pressure produces gas- or vapour-filled voids in the liquid. The eventual collapse of these voids generates intense shock waves with pressure amplitudes several orders larger than the initiating pressure. When a bubble collapse occurs adjacent to a soiled surface, particles of adulterant are disrupted from the surface and dispersed. Increasing cavitation will eventually reach a point where the surface itself is abraded and it is therefore necessary to impose a limit on the acoustic intensity when delicate objects are being cleaned. For some years a qualitative test of cleaning efficiency has been to immerse a piece of aluminium foil in the ultrasonic bath and to note the time for disruption of the foil. There are three phases in the cavitation process : an initial liberation of dissolved gas resulting in large numbers of visible bubbles, the stimulation of resonance in bubbles of a finite size, and the eventual collapse of the bubble, producing a large amplitude shock wave. The first phase of gas liberation occurs at quite low sonic intensities and is seen over a wide frequency range. Fig. 1 shows the focusing effect of a tube segment transducer in which the streams of gas bubbles liberated by cavitation trace out the beam path. At the focus there is a high concentration of acoustic energy, and the cavities formed at this centre are no longer filled with gas. The pressure amplitude exceeds the vapour pressure of the liquid and the cavities are filled with vapour. The collapse of vapour cavities produces shock waves of even greater amplitude than those produced by gas-filled bubbles. Cavitation stimulated by acoustic energy is basically due to resonance effects in the bubbles. The bubble usually forms round a nucleus such as a microscopically small suspended particle or the minute particles of gas clinging to a boundary layer in the liquid. Owing to the alteration in wavelength, bubbles of different sizes will resonate as the frequency is changed. At any given intensity and frequency, only cavities within a particular range of sizes will be stimulated into cavitation, the upper size limit being approximately that at which the bubble will resonate. For example, the resonant radii of air bubbles in water at 1 atm are about 0.6 mm at 10 kc/s, 0.05 mm at 100 kc/s and 0.004 mm at 1 MC/S. Cavitation commences with a growth stage in which bubbles too small to cavitate are set into oscillation by the sound field and grow by a rectified diffusion process until they reach the resonant size. The oscillations then rapidly increase in amplitude and result in an eventual collapse. This violent collapse produces large shock waves that can exceed 1,000 atm.2 The diameter of the void must be smaller than the resonant size, and so an increase in frequency will result in fewer bubbles being available for the occurrence of rectified diffusion and in an increase in the minimum power required to produce cavitation. The ratio of the initial radius to the collapse radius decreases with frequency and the generated shock wave will have a smaller amplitude with increasing frequency.3 With a frequency of 10 kc/s the acoustic intensity for cavitation in aerated water at room temperature and atmospheric pressure is about O-3 W/cm2. This increases to Fig. 2. Cleaning a wafer switch by cavitation l-0 W/cm2 at 100 kc/s and 500 W/cm2 at 1 MC/S. The surface tension, and thus the vapour pressure, influences these onset figures, and many organic liquids will cavitate at somewhat lower ones. Similarly, a reduction in atmospheric pressure also reduces the thresholds. Ultrasonic cleaning baths usually incorporate an arrangement of transducers positioned at the base of the tank. The liquid snrface and the sides of the tank constitute reflecting faces, and articles placed in the tank also provide surfaces from which a standing wave formation will be created. This means that gaseous bubbles will collect at nodal points in the standing wave and provide further reflecting surfaces. In early equipments using continuous wave power supplies it was necessary to move the articles in the bath to avoid the masking effect of the reflecting layers. It was realized that by pulsing the electrical input, time would be allowed between pulses for the bubbles to disperse and promote continuous cavitation over the entire volume of liquid within the sound field. A pulsed system also somewhat simplifies the electrical circuit, and most of the present-day equipments incorporate pulsed supplies, usually at twice mains frequency. Some designs use a swept-frequency generator to achieve the same purpose, and this also allows unselected transducers to be used. With transducers of high Q-factor a multiple element array would normally require close frequency matching to ensure that full power is delivered by each element. When a sweep frequency of a bandwidth covering the frequency spread of the transducers is used, there will always be one or more transducers delivering full power at any given time. However, acoustic power within the bath must be uneven owing to the random excitation of the individual elements. The cleaning effect due to intense cavitation is strikingly shown in Fig. 2 where dirt from a wafer switch is being rapidly dispersed. SURFACE ADULTERATION The removal of dirt from contaminated surfaces is a problem experienced in all industries. The contaminant can be of many forms and be held to the surface by a number of forces. In the simplest case a clean surface will collect dust by atmospheric deposition. Electrostatic forces will sometimes prevent removal but generally there is no cleaning problem. Perhaps the most common soiling is found where solid particles are bonded to the surface by an oily film. This film can be either organic or inorganic, and if partial carbonization has occurred because of heat, its removal will present greater difficulties. Finally, there is contamination due to a chemical bond such as an oxide film. In practice, combinations of all three types of soiling are generally experienced. One of the widely known effects of ultrasonic cavitation is that of emulsification. Oil can be finely dispersed through water to form an emulsion and this process forms the basis for simple ultrasonic cleaning. A soiled oily surface immersed in water and subjected to. intense ultrasonic energy will have the soiling removed by two separate processes. The oil film initially emulsifies leaving solid particles adhering to the surface. These are in turn dispersed by the vibration amplitude, leaving a clean surface. When oxide film or scale is present, it is generally necessary to soften or re-form the surface by chemical means before a cleaning action can take place. It is obvious that, while water can be used, there are distinct advantages in choosing a solution that will dissolve uLTRAsoNICs/April-June 1963 67 or alter the bonding medium. In the early days of ultrasonic cleaning it was common to employ organic solvents such as trichlorethylene. Developments in surface chemistry have now resulted in a range of water-soluble detergents that show many advantages over organic solvents, and these have largely replaced them in practical cleaning systems. The correct choice of a solvent or detergent is important and is made after a study of the type of soiling present. TRANSDUCER SYSTEMS Two methods of converting electrical energy to high-power ultrasonic energy are at present available. Magnetostrictive transducers use the change in dimensions produced in Fig. 3. Construction of a Multipower transducer A. Radiating face; B. Low density material; C. High density material; D. Cone spring washers; E. Piezoelectric ceramic discs(4 in all); F. Compression bolt certain materials when they are placed in a magnetic field. Piezoelectric transducers are based on the dimensional change occurring in some crystal structures when an electrostatic field is present. Both systems are used in ultrasonic cleaning baths, but magnetostrictive transducers are mainly restricted to applications where localized highintensity fields are required.* The first high frequency generators used quartz plates cut from single crystals, but the high impedance of the transducers necessitated very high energizing voltages and accurate frequency adjustment because of the high Q-factor of the system. The development of barium titanate piezoelectric ceramic provided a more adaptable .material, but manufacturers were still biased towards the high frequency end of the ultrasonic spectrum and barium titanate plates were used to generate frequencies between 100 and 400 kc/s.5 The mechanical Q-factor of barium titanate ceramic is very much lower than that of quartz and so is the electrical impedance at resonance. Power supplies became simpler, requiring less precise frequency control and lower energizing voltages. During the early 195Os, studies of the mechanism of cavitation conclusively showed the advantage of reducing 68 ULTRASONICS/A~~~I-J~~~ 1963 the frequency and as a result it steadily decreased, eventually reaching 40 kc/s. Being a mechanically resonant structure, a transducer is generally operated as a half-wavelength element. In barium titanate this corresponds to a thickness of about 2 in and is the largest dimension for a practical single element transducer. Before a polycrystalline piezoelectric can be energized, it is necessary to prepolarize it by means of a large electrostatic field, and there are many difficulties in polarizing a thickness of more than 2 in. Similarly, the energizing voltage must also be increased with increasing thickness and this produces problems in generator design. Barium titanate has a Curie point at about 100°C; that is, at this temperature the initial polarization of the material is permanently destroyed. Dielectric and mechanical losses cause a normal temperature rise when the material is driven at cavitation power densities, and without the provision of elaborate cooling systems the operation of a barium titanate cleaning bath is restricted to about 85°C. More recent developments in cleaning fluids have produced solutions which should be used at temperatures of over lOO”C,and the limitations of barium titanate have restricted their general employment. The discovery of the piezoelectric effect in polarized lead zirconate-titanate ceramic gave a further impetus to ultrasonic cleaning by providing a material capable of operating safely up to at least 250”C6>’ The greatly increased efficiency gave promise of higher power densities, but once again thickness limitations governed the lower frequency limit. With lead zirconatetitanate there is even difficulty in reaching 40 kc/s, and because of this limitation, the material is rarely used as a half-wavelength resonator for cleaners. To solve this problem the principle of mass loading was employed. In the early days of submarine detection Langevin showed that a sandwich composed of a thin slice of piezoelectric material and two metal masses could be excited into resonance at a frequency governed by the dimensions of the metal blocks.8 The quartz crystal used by Langevin has been replaced by barium titanate or lead zirconate-titanate and it is now possible to design transducers operating down to at least 10 kc/s. Sandwich transducers are generally assembled using epoxide resins as the jointing medium. During the extension phase of the cyclic motion of the transducer, considerable stresses are imparted across the cement joint and this limits the maximum amplitude. A new form of sandwich transducer based on a pre-stressed structure overcomes this problem. Known as the Multipower transducer it combines a bolted structure with asymmetrical operation giving a single-face power gain. s~l” Dissimilar metals are used for the two loading blocks, usually aluminium and steel. To follow the law of conservation of momentum, the amplitude at the face of the aluminium block must be higher than that at the steel face. By using the lighter metal as the radiator, considerably less energy is dissipated at the unused back face and the overall power gain into the liquid is made at least three times a normal symmetrical,system. The construction of this transducer is shown in Fig. 3. These are essentially systems with a relatively low mechanical Q-factor, and with a bandwidth of 4 kc/s around a designed resonant frequency of 20 kc/s, and thus obviate the necessity of tuning controls or feedback circuits. The bolted structure does not generally require cementing between the ceramic and metal masses since the mechanical bias suppresses the extension phase. TANK DESIGN Since no acoustic system can be studied without consideration of the complete structure, it is necessary to design cleaning tanks based on correct acoustic principles if maximum cleaning efficiency is to be obtained. There would be little point in mounting one transducer with a face area of 4 in2 in the centre of a tank bottom with an area of 100 in2 unless localized cleaning was required. The thin wall of a typical cleaning tank does not act as part of the transducer face but is merely a transmission diaphragm. Secondary vibrations of the tank structure play a minor part in the distribution of cavitation zones and a study of tank parameters has been the subject of a recent paper.ll It is general to cover the tank floor with transducers to ensure a minimum number of “dead spots” where little cleaning Fig. 4. Tank assembly with 12 transducers and a total input of 500 W Fig. 5. Immersible transducer and lead action is found. A typical tank assembly is shown in Fig. 4 where 12 transducers are energized by an average total input power of 500 W. Each transducer is driven at an intensity of 1.6 W/cm2 of radiating area. If internal losses in the transducers are assumed to be negligible, the total output of the units averaged over a tank bottom area of 813 cm2 results in a tank power density of 0.62 W/cm2. In all Multipower cleaning tanks there are approximately 25 W/l of liquid at average power, and twice this at peak power. The power supply used with this tank consists of a fully transistorized push-pull self-excited oscillator using multiple parallel-connected germanium transistors. Operating frequency is centred at 20 kc/s, which is determined by the inductance of a ferrite-cored output transformer and a suitable capacitance. Full-wave silicon rectifiers are used in the d.c. power supply, but the filter capacitor is of small value, leaving the generator output waveform heavily modulated at twice the mains frequency. Frequency modulation of sufficient magnitude to eliminate manual tuning of the low Q-factor transducers is developed by allowing the transformer ferrite core to saturate periodically. Peak transistor current due to the unsmoothed supply voltage is sufficient to alter the transformer inductance, and thus frequency modulates the selfexcited oscillator. The compact layout possible with this design enables generators to be stacked as modules. Immersible transducers of the type shown in Fig. 5 allow very large cleaning installations to be built. Each generator energizes two or more transducers, and thus provides an adaptable cleaning system for complex operations. The packing density of the power supplies is very high, 25 kW being easily contained in a standard 6 ft rack. CONCLUSIONS The demand for reliability in industry has stimulated the search for cleanliness. Clean rooms and mechanized assembly procedures ensure that soiling does not occur after piece parts are completed, but manufacturing operations invariably produce contaminants. The rapid growth of ultrasonic cleaning has been due to the many man-hours entailed in normal cleaning methods. Ultrasonic cleaners save time and often produce results unequalled by any other method, ensuring a progressive future for this technique. REFERENCES 1. “High frequency ultrasonic generator,” Mullard Ltd., 1949. 2. CRAWFORD,ALAN E., “Ultrasonic engineering,” Butterworths (1955). 3. NOLTINGK,B. E. and NEPPIRAS,E. A., Proc. Phys. Sot. London, Series B 63, 674 (1950); 64, 1032 (1951). 4. MYERS, J. A. and GOODMAN, J. E., Pharm. J., 585, December (1960). 5: AT~ERTON,L., Brit. Comm. and Electronics, 138, March (1957). 6. JAFFE,B., ROTH. R. S. and MARZULLO,S., J. appl. Phys. 25. 809, (1954) 7. CRAWFORD,A. E., Brit. J. appl. Phys. 12, 529 (1961). 8. LANGEVIN,P., Brit. Pat. No. 145,691: 1921. 9. RWH, S., Brit. Pat. No. 686,784: 1957. 10. CRAWFORD,A. E. Paper No. 23 at 4th I.C.A., Copenhagen, August, 1962. 11. ROD, R. L., Paper presented at Brno, September, 1962. ULTRASONICS/A~~~MWZ~I%3 69