Bedru B. and Seid H
ECONOMETRICS
A TEACHING MATERIAL FOR DISTANCE
STUDENTS MAJORING IN ECONOMICS
Module II
Prepared By:
Bedru Babulo
Seid Hassen
Department of Economics
Faculty of Business and Economics
Mekelle University
August, 2005
Mekelle
Econometrics: Module-II
Bedru B. and Seid H
Econometrics
Module II
II
Introduction to the module
The principal objective of the course, “Introduction to Econometrics”, is to provide an
elementary but comprehensive introduction to the art and science of econometrics. It enables
students to see how economic theory, statistical and mathematical methods are combined in the
analysis of economic data, with a purpose of giving empirical content to economic theories and
verify or refute them.
Module II of the course is a continuation of module-I. In the first module of the course the first
three chapters - introductory chapter, the simple classical regression models, and the multiple
regression models - are presented with a fairly detailed treatment. In the two of chapters of
Module-I i.e. on the chapters on ‘Classical Linear Regression Models’ , students are introduced
with the basic logic, concepts, assumptions, estimation methods, and interpretations of the
classical linear regression models and their applications in economic science.
The ordinary least square (OLS) estimation method discussed in module-I possess the desirable
properties of estimators provided that the basic classical assumptions are satisfied. But in many
real world instances, the classical assumptions of linear regression models may be violated.
Therefore, module-II pays due attention to violations of these assumptions, their consequences,
and the remedial measures. Specifically, Autocorrelation, Heteroscedasticity, and Multicolliearity
problems will be given much focus.
Besides the discussions on ‘violations of classical assumptions’, three more chapters viz.
Regression on Dummy Variables; Dynamic Econometric Models; and an Introduction to
Simultaneous Equation Models are also included in Module-II.
Chapters of Module-II in Brief
Chapter Four: Violations of the assumptions of Classical Linear Regression models
4.1 Heteroscedasticity
4.2 Autocorrelation
4.3 Multicollinearity
Chapter Five: Regression on Dummy Variables
Chapter Six: Dynamic econometric models
Chapter Seven: An Introduction to Simultaneous Equation models
Econometrics: Module-II
Bedru B. and Seid H
Enjoy the Reading!!!
Chapter Four
Violations of basic Classical Assumptions
4.0 Introduction
In both the simple and multiple regression models, we made important
assumptions about the distribution of Yt and the random error term ‘ut’. We
assumed that ‘ut’ was random variable with mean zero and var(u t ) = σ 2 , and that
the errors corresponding to different observation are uncorrelated, cov(u t , u s ) = 0
(for t ≠ s) and in multiple regression we assumed there is no perfect correlation
between the independent variables.
Now, we address the following ‘what if’ questions in this chapter. What if the
error variance is not constant over all observations? What if the different errors
are correlated? What if the explanatory variables are correlated? We need to ask
whether and when such violations of the basic clssical assumptions are likely to
occur. What types of data are likely to lead to heterosedasticity (different error
variance)?
What type of data is likely to lead to autocorrelation (correlated
errors)? What types of data are likely to lead to multicollinearity? What are the
consequences such violations on least square estimators? How do we detect the
presence of autocorrelation, heteroscedasticity, or multicollineairy? What are the
remedial measures? How do we build an alternative model and an alternative set
of assumptions when these violations exist? Do we need to develop new
estimation procedures to tackle the problems? In the subsequent sections (4.1, 4.2,
and 4.3), we attempt to answer such questions.
4.1 Heteroscedasticity
4.1.1 The nature of Heteroscedasticty
Econometrics: Module-II
Bedru B. and Seid H
In the classical linear regression model, one of the basic assumptions is that the
probability distribution of the disturbance term remains same over all observations
of X; i.e. the variance of each u i is the same for all the values of the explanatory
variable. Symbolically,
var(u i ) = Ε[u i − Ε(u i )] = Ε(u i2 ) = σ u2 ; constant value.
2
This feature of homogeneity of variance (or constant variance) is known as
homoscedasticity. It may be the case, however, that all of the disturbance terms
do not have the same variance. This condition of non-constant variance or nonhomogeneity of variance is known as heteroscedasticity. Thus, we say that U’s
are heteroscedastic when:
var(u i ) ≠ σ u2 (a constant) but
var(u i ) = σ ui2 (a value that varies)
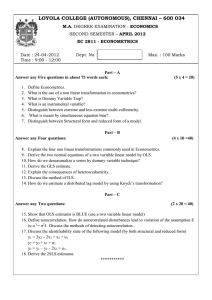
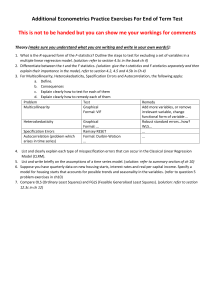
4.1.2 Graphical representation of heteroscedasticity and homoscedasticity
The assumption of homoscedasticity states that the variation of each u i around its
zero mean does not depend on the value of explanatory variable. The variance of
each u i remains the same irrespective of small or large values of X; the
explanatory variable. Mathematically, σ u2 is not a function of X; i.e. σ 2 ≠ f ( X i )
Fig. (a) Homosecdastic error variance
Econometrics: Module-II
Bedru B. and Seid H
fig.(b) Heteroscedastic error variance
If the variance of U were the same at every point or for all values of X, definite
restriction would be place on the scatter of Y against X when plotted in the three
dimensions, we should observe something approximating the pattern of fig (a). In
contrast, consider fig (b) shows that the conditional variance of Yi (which in fact is
u i ) increases as X increases.
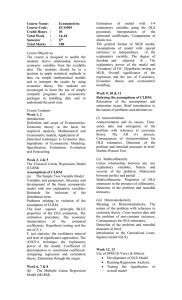
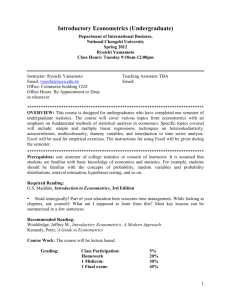
If σ u2 is not constant but its value depends on the value of X; it means that
σ ui2 = f ( X i ) . Such dependency is depicted diagrammatically in the following
figures. Three cases of heteroscedasticity all shown by increasing or decreasing
dispersion of the observation from the regression line.
In panel (a) σ u2 seems to increase with X. in panel (b) the error variance appears
greater in X’s middle range, tapering off toward the extremes. Finally, in panel
Econometrics: Module-II
Bedru B. and Seid H
(c), the variance of the error term is greater for low values of X, declining and
leveling off rapidly an X increases.
The pattern of hetroscedasticity would depend on the signs and values of the
coefficients of the relationship σ ui2 = f ( X i ) , but u i ’s are not observable. As such
in applied research we make convenient assumptions that hetroscedasticity is of
the forms:
i.
σ ui2 = K 2 ( X i2 )
ii.
σ 2 = K 2 (X i )
iii.
σ ui2 =
K
etc.
Xi
4.1.3 Matrix Notation of Heteroscedasticity
The variance covariance matrix developed in chapter 2 is represented as:
Ε(U i2 ) Ε(U 1U 2 ) .......... Ε(U 1U n )
Ε(U 1U 2 ) Ε(U 22 ) .......... Ε(U 2U n )
Ε(UU ' ) =
:
:
:
2
Ε(U 1U n ) Ε(U 2U n ) .......... Ε(U n )
If Ε(U i2 ) ≠ σ u2 (a constant value), then Ε(UU ' ) ≠ σ 2 I n given that Ε(U iU j ) = 0 . If
Ε(U i2 ) = σ ui2 (a value that varies)
λ1
0
Ε(UU ' ) =
:
0
0
λ2
:
0
0
0
………………………………………..3.10
:
.......... λ n
..........
..........
Where λi = Ε(U i2 ) . In other words, variance covariance matrix in the present case
is a diagonal matrix with unequal elements in the diagonal.
4..1.4 Examples of Heteroscedastic functions
I. Consumption Function: Suppose we are to study the consumption expenditure
from a given cross-section sample of family budgets:
C i = α + β Yi + U i ; where:
Econometrics: Module-II
Bedru B. and Seid H
C i = Consumption expenditure of ith household; Yi = Disposable income of ith household
At low levels of income, the average consumption is low, and the variation below
this level is less possible; consumption cannot fall too far below because this
might mean starvation. On the other hand, it cannot rise too far above because
money income does not permit it. Such constraints may not be found at higher
income levels. Thus, consumption patterns are more regular at lower income
levels than at higher levels. This implies that at high incomes the u' s will be high,
while at low incomes the u' s will be small. The assumption of constant variance
of u' s is therefore, does not hold when estimating the consumption function from
across section of family budgets.
ii. Production Function: Suppose we are required to estimate the production
function X = f ( K , L) of the sugar industry from a cross-section random sample of
firms of the industry. Disturbance terms in the production function would stand
for many factors; like entrepreneurship, technological differences, selling and
purchasing procedures, differences in organizations, etc. other than inputs, labor
(L) and capital (K) considered in the production function. The factors mentioned
above, which are not considered explicitly in the production function show
considerable variance in large firms than in small ones. This leads to breakdown
of our assumption on homogeneity of variance terms.
It should be noted that the problem of heteroscedasticity is likely to be more
common in cross-sectional data than in time-series data. One deals with members
of population at a given point of time, such as individual consumers or their
families, firms, industries. These members may be of different size such as small,
medium or large firms or low, medium or high income. In time series data on the
other hand, the variables tend to be of similar orders of magnitude because one
generally collects data for the same entity over a period of time.
Econometrics: Module-II
Bedru B. and Seid H
4.1.5 Reasons for Hetroscedasticity
There are several reasons why the variances of u i may be variable. Some of these
are:
1. Error learning model: it states that as people learn their error of behavior
become smaller over time. In this case σ i2 is expected to decrease.
Example: as the number of hours of typing practice increases, the average number of
typing errors and as well as their variance decreases.
2. As data collection technique improves, σ ui2 is likely to decrease. Thus banks that
have sophisticated data processing equipment are likely to commit fewer errors in
the monthly or quarterly statements of their customers than banks with out such
facilities.
3. Heteroscedasticity can also arise as a result of the presence of outliers. An
outlier is an observation that is much different (either very small or very large) in
relation to the other observation in the sample.
4.1.6 Consequences of Hetroscedasticity for the Least Square estimates
What happens when we use ordinary least squares procedure to a model with
hetroscedastic disturbance terms?
1.The OLS estimators will have no bias
βˆ =
Σx u
Σxy
= β + i 2i
2
Σx
Σx
ΣxΕ(u i )
Ε( βˆ ) = β +
=β
Σx 2
Similarly ;
αˆ = Y − βˆX = (α + β X + U ) − βˆX
Ε(αˆ ) = α + β X + Ε(U ) − Ε( βˆ ) X = α
i.e., the least square estimators are unbiased even under the condition of
heteroscedasticity.
It is because we do not make use of assumption of
homoscedasticity here.
Econometrics: Module-II
Bedru B. and Seid H
2. Variance of OLS coefficients will be incorrect
Under
homoscedasticity, var(βˆ ) = σ 2 ΣK 2 =
σ2
Σx 2
,
but
under
hetroscedastic
assumption we shall have: var(βˆ ) = ΣK i2 Ε(Yi 2 ) = ΣK i2σ ui2 ≠ σ 2 ΣK i2
σ ui2 is no more a finite constant figure, but rather it tends to change with an
increasing range of value of X and hence cannot be taken out of the summation
(notation).
3.OLS estimators shall be inefficient: in other words, the OLS estimators do not
have the smallest variance in the class of unbiased estimators and, therefore, they
are not efficient both in small and large samples. Under the heteroscedastic
assumption, therefore:
var(βˆ ) = ΣK 2 Ε(Y 2)
i
i
Under homoscedasticy, var(βˆ ) =
Σxi2σ ui2
xi
2
= ∑ 2 Ε(Yi ) =
− − − − − − − − − 3.11
(Σxi2 ) 2
Σx
σ2
Σx 2
− − − − − − − − − − − − − − − − − − − 3.12
These two variances are different. This implies that, under heteroscedastic
assumption although the OLS estimator is unbiased, but it is inefficient.
variance is larger than necessary.
To see the consequence of using (3.12) instead of (3.11), let us assume that:
σ ui2 = K iσ 2
Where K i are same non-stochastic constant weights. This assumption merely
states that the hetroscedastic variances are proportional to K i ; σ 2 being facto of
proportionality. Substituting this value of σ ui2 in (3.11), we obtain:
σ2
σ 2 Σk i xi2
ˆ
var(β ) =
= 2
(Σxi2 )(Σxi ) 2
Σx
Σk i xi2
2
Σxi
Σk x 2
= (var(βˆ ) Homo . i 2 i − − − − − 3.13
Σxi
Econometrics: Module-II
Its
Bedru B. and Seid H
That is to say if x 2 and k i are positively correlated and if and only if the second
term of (3.13) is greater than 1, then var(βˆ ) under heteroscedasticty will be greater
than its variance under homoscedasticity. As a result the true standard error of β̂
shall be underestimated. As such the t-value associated with it will be over
estimated which might lead to the conclusion that in a specific case at hand β̂ is
statistically significant (which in fact may not be true). Moreover, if we proceed
with our model under false belief of homoscedasticity of the error variance, our
inference and prediction about the population coefficients would be incorrect.
4.1.7 Detecting Heteroscedasticity
We have observed that the consequences of heteroscedasticty are serious on OLS
estimates. As such, it is desirable to examine whether or not the regression model
is in fact homosedastic. Hence there are two methods of testing or detecting
heteroscedasticity. These are:
i.
Informal method
ii.
Formal method
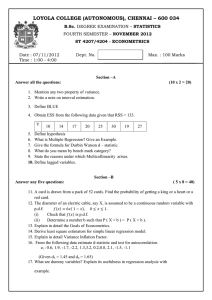
i. Informal method
This method is called informal because it does not undertake the formal testing
procedures such as t-test, F-test and the like. It is a test based on the nature of the
graph. In this method to check whether a given data exhibits hetroscedsticity or
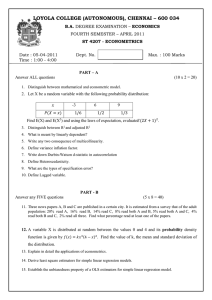
not we look on whether there is a systematic relation between residual squared
ei2 and the mean value of Y i.e. (Yˆ ) or with X i . In the figure below ei2 are plotted
against Yˆ or ( X i ) . In fig (a), we see there is no systematic pattern between the two
variables, suggesting that perhaps no hetroscedasticity is present in the data.
Figures b to e, however, exhibit definite patterns. . For instance, c suggests a
linear relationship where as d and e indicate quadratic relationship between
ei2 and Yi .
Econometrics: Module-II
Bedru B. and Seid H
ii.
Formal methods
There are several formal methods of testing heteroscedasticty which are based on
the formal testing procedures mentioned earlier. In what follows, we will see some
of the major ways of detecting heterosedasticity.
a. Park test
Park formalizes the graphical method by suggesting that the variance of random
disturbance σ i2 is some function of the explanatory variable X i . The functional
form he suggested was: σ i2 = σ 2 X iβ e vi
Or ln σ i2 = ln σ 2 + β ln X i + vi − − − − − − 3.14
where v is the stochastic disturbance term.
Since σ i2 is generally not known, park suggests using ei2 as proxy and running the
following regression.
ln ei2 = ln σ 2 + β ln X i + vi
ln ei2 = α + β ln X i + vi − − − − − − − 3.15 Since σ 2 is constant.
Econometrics: Module-II
Bedru B. and Seid H
Equation (3.15) indicates on how to test hetroscedasticity by testing on whether
there is a significant relation between X i and ei2 .
Let
H0 : β = 0
Against H 1 : β ≠ 0
If β turns out to be statistically significant, it would suggest that hetroscedasticity
is present in the data. If it turns out to be insignificant, we may accept the
assumption of homoscedasticity. The park test is thus a two-stage test procedure;
in the first stage, we run OLS regression disregarding the hetroscedasticity
question. We obtain ei from this regression and then in the second stage we run
the regression in equation (3.15) above.
Example: Suppose that from a sample of size n=100 we estimate the relation
between compensation and productivity.
Y = 1992.342 + 0.2329 X i + ei − − − − − − − 3.16
SE = (936.479) (0.0098)
t=
(2.1275)
(2.333)
R 2 = 0.4375
The results reveal that the estimated slope coefficient is significant at 5% level of
significant on the bases of one tail t-test. The equation shows that as labour
productivity increases by, say, a birr, labor compensation on the average increases
by about 23 cents.
The residual obtained from regression (3.16) were regressed on X i as suggested by
equation (3.15) giving the following result.
ln ei2 = 35.817 − 2.8099 ln X i + vi − − − − − −(3.17)
SE = (38.319) (4.216)
t
= (0.934) (−0.667)
R 2 = 0.0595
The above result revealed that the slope coefficient is statistically insignificant
implying there is no statistically significant relationship between the two variables.
Following the park test, one may conclude that there is no hetroscedasticity in the
error variance. Although empirically appealing, the park test has some problems.
Econometrics: Module-II
Bedru B. and Seid H
Gold Feld and Quandt have argued that the error term vi entering into
ln ei2 = α + β ln X i + vi may not satisfy the OLS assumptions and may itself be
hetroscedastic. Nonetheless, as a strict explanatory method, one may use the park
test.
b. Glejser test:
The Glejser test is similar in sprit to the park test. After obtaining the residuals ei
from the OLS regression. Glejser suggest regressing the absolute value of U i on
the X i variable that is thought to be closely associated with σ i2 . In his experiment,
Glejser use the following functional forms:
1
+ vi
Xi
ei = α + β X i + vi ,
ei = α + β
ei = α + β X i + vi ,
ei = α + β X i + vi
ei = α + β
1
+ vi ,
Xi
; where vi is error term.
ei = α + β X i2 + vi
Goldfeld and Quandt point out that error term vi has some problems in that its
expected value is non-zero, i.e. it is serially correlated and irrorrically it is
heteroscedstic. An additional difficulty with the Glejser method is that models
such as:
ei = α + β X i + vi and
ei = α + βX i2 + vi
are non-linear in parameters and therefore cannot be estimated with the usual OLS
procedure. Glejester has found that for large samples the first four preceding
models give generally satisfactory results in detecting heterosedasticity. As a
practical matter, therefore, the Glejester technique may be used for large samples
and may be used in small samples strictly as qualitative device to learn something
about heterosedasticity.
c. Goldfield-Quandt test
This popular method is applicable if one assumes that the heteroscedastic
variance σ i2 is positively related to one of the explanatory variables in the
regression model. For simplicity, consider the usual two variable models:
Econometrics: Module-II
Bedru B. and Seid H
Yi = α + β i X i + U i
Suppose σ i2 is positively related to X i as:
σ i2 = σ 2 X i2 − − − − − − − 3.18; where σ 2 is constant.
If the above equation is appropriate, it would mean σ i2 would be larger, the larger
values of X i .If that turns out to be the case, hetroscedasticity is most likely to be
present in the model. To test this explicitly, Goldfeld and Quandt suggest the
following steps:
Step 1: Order or rank the observations according to the values of X i beginning
with the lowest X value
Step 2: Omit C central observations where C is specified a priori, and divide the
(n − c)
observations
2
(n − c)
Step 3: Fit separate OLS regression to the first
observations and the last
2
(n − c)
observations, and obtain the respective residual sums of squares RSS, and
2
remaining (n-c) observations into two groups each of
RSS2, RSS1 representing RSS from the regression corresponding to the smaller
X i values (the small variance group) and RSS2 that from the larger X i values (the
large variance group). These RSS each have
(n − c)
(n − c − 2 K )
− K or
df , where: K is the number of parameters to
2
2
be estimated, including the intercept term; and
Step 4: compute λ =
df is the degree of freedom.
RSS 2 / df
RSS1 / df
If U i are assumed to be normally distributed (which we usually do), and if the
assumption of homoscedasticity is valid, then it can be shown that λ follows F
distribution with numerator and denominator df each (n-c-2k)/2.
λ=
RSS 2 /(n − c − 2 K ) / 2
~ F (n -c) (n -c)
−K ,
−K
RSS1 /(n − c − 2 K ) / 2
2
2
Econometrics: Module-II
Bedru B. and Seid H
If in application the computed λ (= F ) is greater than the critical F at the chosen
level of significance, we can reject the hypothesis of homoscedasticity, i.e. we can
say that hetroscedasticity is very likely.
Example: to illustrate the Goldfeld-Quandt test, we present in table 3.1 data on
consumption expenditure in relation to income for a cross-section of 30 families.
Suppose we postulate that consumption expenditure is linearly related to income
but that heteroscedasticity is present in the data. We further postulate that the
nature of heterosedastic is given in equation (3.15) above.
The necessary
reordering of the data for the application of the test is also presented in table 3.1.
Table 3.1 Hypothetical data on consumption expenditure Y($) and income X($). (Data ranked by X values)
Y
55
65
70
80
79
84
98
95
90
75
74
110
113
125
108
115
140
120
145
130
152
144
175
180
135
140
178
191
137
189
X
80
100
85
110
120
115
130
140
125
90
105
160
150
165
145
180
225
200
240
185
220
210
245
260
190
205
265
270
230
250
Y
55
70
75
65
74
80
84
79
90
98
95
108
113
110
125
115
130
135
120
140
144
152
140
137
145
175
189
180
178
191
X
80
85
90
100
105
110
115
120
125
130
140
145
150
160
165
180
185
190
200
205
210
220
225
230
240
245
250
260
265
270
Dropping the middle four observations, the OLS regression based on the first 13
and the last 13 observations and their associated sums of squares are shown next
(standard errors in parentheses). Regression based on the last 13 observations
Econometrics: Module-II
Bedru B. and Seid H
Yi = 3.4094 + 0.6968 X i + ei
(8.7049)
(0.0744)
R = 0.8887
2
RSS1 = 377.17
df = 11
Regression based on the last 13 observations
Yi = −28.0272 + 0.7941X i + ei
(30.6421)
(0.1319)
R = 0.7681
2
RSS 2 = 1536.8
df = 11
From these results we obtain:
λ=
RSS 2 / df 1536.8 / 11
=
RSS1 / df 377.17 / 11
λ = 4.07
The critical F-value for 11 numerator and 11 denominator for df at the 5% level is
2.82.
Since the estimated F (= λ ) value exceeds the critical value, we may
conclude that there is hetrosedasticity in the error variance. However, if the level
of significance is fixed at 1%, we may not reject the assumption of
homosedasticity (why?) Note that the ρ value of the observed λ is 0.014.
There are also other tests of hetroscedasticity like spearman’s rank correlation test,
Breusch-pagan-Goldfe y test and white’s general hetroscedastic test. But at these
introductory level the above tests are enough.
4.1.8 Remedial measures for the problems of heteroscedasticity
As we have seen, heteroscedasticity does not destroy the unbiasedness and
consistency property of the OLS estimators, but they are no longer efficient. This
lack of efficiency makes the usual hypothesis testing procedure of dubious value.
Therefore, remedial measures concentrate on the variance of the error term.
Consider the model
Y = α + β X i + U i , var(u i ) = σ i2 , Ε(u i ) = 0
Ε(u i u j ) = 0
Econometrics: Module-II
Bedru B. and Seid H
If we apply OLS to the above then it will result in inefficient parameters since
var(u i ) is not constant.
The remedial measure is transforming the above model so that the transformed
model satisfies all the assumptions of the classical regression model including
homoscedasticity. Applying OLS to the transformed variables is known as the
method of Generalized Least Squares (GLS).
In short GLS is OLS on the
transformed variables that satisfy the standard least squares assumptions. The
estimators thus obtained are known as GLS estimators, and it is these estimators
that are BLUE.
4.1.8.1 The Method of Generalized (Weight) Least Square
Assume that our original model is: Y = α + βX i + U i where u i satisfied all the
assumptions except that u i is heteroscedastic.
Ε(u i ) 2 = σ i2 = f (k i )
If we apply OLS to the above model, the estimators are no more BLUE. To make
them BLUE we have to transform the above model.
Let us assume the following types of hetroscedastic structures, under two
conditions: hetroschedasticity when the population variance σ i2 is known and
when σ i2 is not known.
a. Assume σ i2 known:
Ε(u i ) 2 = σ i2
Given the model Y = α + β X i + U i
The transforming variable of the above model is
σ i2 = σ i so that the variance of
the transformed error term is constant. Now divide the above model by σ i .
Y
σi
=
α βX i U i
+
+
− − − − − − − − − (3.19)
σi σi σi
The variance of the transformed error term is constant, i.e.
u
var i
σi
u
= Ε i
σi
2
1
1
= 2 Ε(u i ) 2 = 2 σ i2 = 1 Constant
σi
σi
Econometrics: Module-II
Bedru B. and Seid H
We can know apply OLS to the above model. The transformed parameters are
BLUE. Because all the assumptions including homoscedasticity are satisfied to
(3.1).
ui
σi
=
1
σi
u
∑ σ i
i
∑ w uˆ
i
(Yi − α − βX i )
2
2
1
1
= ∑
(Yi − α − βX i ) 2 , Let wi = 2
σi
σi
2
i
= Σwi (Yi − αˆ − βˆX i ) 2
The method of GLS (WLS) minimizes the weighted residual sum of squares
∂ ∑ wi uˆ i2
= −2Σwi (Yi − αˆ − βˆX i ) = 0
∂αˆ
Σwi (Yi − αˆ − βˆX i ) = 0
Σwi Yi − αˆΣwi − βˆΣwi X i = 0
⇒ Σwi Yi − βˆΣwi X i = αˆΣwi
αˆ =
Σwi Yi βˆΣwi X i
−
= Y * − βˆX *
Σwi
Σwi
where Y * is the weighted mean and X * is the weighted mean which
are different from the ordinary mean we discussed in 2.1 and 2.2.
2.
∂ ∑ wi uˆ i2
= −2Σwi (Yi − αˆ − βˆX i )( X i ) = 0
∂βˆ
Σwi (Yi − αˆ − βˆX i )( X i ) = 0
2
Σwi (Yi X i − αˆX i − βˆX i ) = 0
2
Σwi Yi X i − αˆΣwi X i − βˆΣwi X i = 0
⇒ Σwi Yi X i = αˆΣwi X i + βˆΣwi X i
2
substituting αˆ = Y * − βˆX * in the above equation we get
2
Σwi Yi X i = (Y * − βˆX * )Σwi X i + βˆΣwi X i
2
= Y * Σwi X i − βˆX * Σwi X i + βˆΣwi X i
Econometrics: Module-II
Bedru B. and Seid H
Σwi Yi X i − Y * Σwi X i = βˆ (Σwi X i2 − X * Σwi X i )
2
Σwi Yi X i − Y * X * Σwi = βˆ (Σwi X i2 − X * Σwi )
βˆ =
Σwi Yi X i − Y * X * Σwi
2
Σwi X i2 − X * Σwi
=
Σx * y *
Σx *
2
where x* and y* are weighted deviations.
These parameters are now BLUE.
b. Now assume that σ i2 is not known
Lets assume that Ε(u i ) 2 = σ i2 = k i f ( X i ) , the transformed version of he model may
be obtained by dividing through out the original model by
f (X i ) .
Case a. Suppose the heteroscedasticity is of the form
Ε(u i ) 2 = σ i2 = k 2 X i2 ,
the transforming variable is
Y = α + βX i + U i where
var(u i ) = σ i2 = K i2 X i2 .
X 2 = X if
The transformed
U
α βX i U i
α
Y
=
+
+
=
+β + i
Xi Xi
Xi
Xi Xi
Xi
model is:
u
Ε i
Xi
2
1
K2X 2
= 2 Ε(u i2 ) =
= K 2 constant
2
Xi
Xi
which proves that the new random term in the model has a finite constant
variance (= K 2 ) . We can, therefore, apply OLS to the transformed version of the
model
α
Xi
+β +
Ui
. Note that in this transformation the position of the coefficients
Xi
has changed: the parameter of the variable
1
Xi
in the transformed model is the
constant intercept of the original model, while the constant of term of the
transformed model is the parameter of the explanatory variable X in the original
model. Therefore, to get back to the original model, we shall have to multiply the
estimated regression by K i .
Case b. Suppose the heteroscedasticity is of the form : Ε(u i2 ) = σ i2 = k 2 X i
Econometrics: Module-II
Bedru B. and Seid H
The transforming variable is
The transformed model is:
=
u
Ε i
X
i
Xi
Y
Xi
α
Xi
=
α
Xi
+
+ β Xi +
βX i
Xi
+
Ui
Xi
Ui
Xi
2
= 1 Ε(U i ) 2 = 1 k 2 X = k 2
X
X
⇒ Constant variance; thus we can apply OLS to the transformed model.
There is no intercept term in the transformed model. Therefore, one will have to
use the ‘regression through the origin’ model to estimate α and β . In this case,
therefore, to get back to the original model, we shall have to multiply the
estimated regression by
Xi
Case c. suppose heteroscedasticity is of the form
Ε(u i2 ) = σ i2 = k 2 [Ε(Yi )]
2
The transforming variable is
Ε(vi ) 2 = Ε(Yi ) = α + β X i
Ui
βX i
Y
α
=
+
+
− − − − − − − − − − − − − − − (i )
α + βX i α + βX i α + βX i α + βX i
Ui
Ε
α + βX i
1
1
2
=
Ε(u i ) 2 =
K 2 [Ε(Yi )] = K 2
2
2
[Ε(Yi )]
(α + β X i )
The transformed model described in (i) above is however not operational in this
case. It is because values of α and β are not known. But since we can obtain
Yˆ = αˆ + βˆX i , the transformation can be made through the following two steps.
1st : we run the usual OLS regression disregarding the heteroscedasticity problem
in the data and obtain Yˆ using the estimated Yˆ , we transform the model as
follows.
X U
Y
1
=α +β i + i
Yˆ
Yˆ
Yˆ
Yˆ
Econometrics: Module-II
Bedru B. and Seid H
It should be, therefore, be clear that in order to adopt the necessary corrective
measure (which is through transformation of the original data in such a way as to
obtain a form in which the transformed disturbance terms possesses constant
variance) we must have information on the form of heteroscedasticity. Also since
our transformed data no more posses heteroscedasticity, it can be shown that the
estimate of the transformed model are more efficient (i.e. they posses smaller
variance) then the estimates obtained from the application of OLS to the original
data.
Let’s assume that a test reveals that original data possesses heteroscedasticity and
that heteroscedasticity of the form σ i2 = K 2 X i2 is being assumed.
Our original model is therefore:
Yi = α + βX i + U i , Ε(U i ) = σ i2 = K 2 X 2
Apply OLS to the above heteroscedastic model
βˆ = β +
Σk i u i
Σx 2
Σk u
var(βˆ ) = Ε( βˆ − β ) 2 = Ε i 2 i
Σx
2
2
=
=
Ε ( Σk i u i + 2 ΣX i X i u i u i )
(Σx )
2 2
i
Σxi2 Ε(u i ) 2
(Σx )
2 2
i
K 2 Σxi2 X 2
=
( Σx 2 ) 2
On transforming the original model we obtain:
ˆ
βˆ =
Yi
α Ui
=β+
+
Xi
Xi Xi
Y
1
−α
Xi
Xi
ˆ
var(βˆ ) =
σ i2 Σ( 1 X )2
nΣ ( 1 X
Since var(βˆ ) in OLS =
K 2 Σ( 1 X )
=
− ( 1 X ) 2 ) nΣ( 1 X − ( 1 X )) 2
2
σ u2 ΣX i2
n Σx 2
Econometrics: Module-II
Bedru B. and Seid H
4.2 Autocorrelation
4.2.1 The nature of Autocorrelation
In our discussion of simple and multiple regression models, one of the
assumptions of the classicalist is that the cov(u i u j ) = Ε(u i u j ) = 0 which implies that
successive values of disturbance term U are temporarily independent, i.e.
disturbance occurring at one point of observation is not related to any other
disturbance. This means that when observations are made over time, the effect of
disturbance occurring at one period does not carry over into another period.
If the above assumption is not satisfied, that is, if the value of U in any particular
period is correlated with its own preceding value(s), we say there is
autocorrelation of the random variables. Hence, autocorrelation is defined as a
‘correlation’ between members of series of observations ordered in time or space.
There is a difference between ‘correlation’ and autocorrelation. Autocorrelation is
a special case of correlation which refers to the relationship between successive
values of the same variable, while correlation may also refer to the relationship
between two or more different variables. Autocorrelation is also sometimes called
as serial correlation but some economists distinguish between these two terms.
According to G.Tinner, autocorrelation is the lag correlation of a given series with
itself but lagged by a number of time units. The term serial correlation is defined
by him as “lag correlation between two different series.”
Thus, correlations
between two time series such as u1 , u 2 .........u10 and u 2 , u 3 .........u11 , where the former
is the latter series lagged by one time period, is autocorrelation. Whereas
correlation between time series such as u1 , u 2 .........u10 and v 2 , v 2 .........v11 where U
and V are two different time series, is called serial correlation. Although the
distinction between the two terms may be useful, we shall treat these terms
synonymously in our subsequent discussion.
Econometrics: Module-II
Bedru B. and Seid H
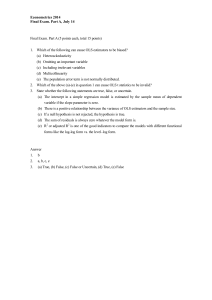
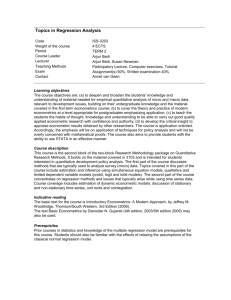
4.2.2 Graphical representation of Autocorrelation
Since autocorrelation is correlation between members of series of observations
ordered in time, we will see graphically the trend of the random variable by
plotting time horizontally and the random variable (U i ) vertically.
Consider the following figures
Ui
Ui
Ui
t
t
(a)
t
(b )
Ui
(c)
Ui
t
: : : : : : :: :: : : : :
t
:::::::::::::
(d)
(e)
The figures (a) –(d) above, show a cyclical pattern among the U’s indicating
autocorrelation i.e. figures (b) and (c) suggest an upward and downward linear
trend and (d) indicates quadratic trend in the disturbance terms.
Figure (e)
indicates no systematic pattern supporting non-autocorrelation assumption of the
classical linear regression model.
We can also show autocorrelation graphically by plotting successive values of the
random disturbance term vertically (ui) and horizontally (uj).
Econometrics: Module-II
Bedru B. and Seid H
The above figures f and g similarly indicates us positive and negative autocorrelation respectively while h indicates no autocorrelation.
In general, if the disturbance terms follow systematic pattern as in (f) and (g) there
is autocorrelation or serial correlation and if there is no systematic pattern, this
indicates no correlation.
42.3 Reasons for Autocorrelation
There are several reasons why serial or autocorrelation a rises. Some of these are:
a. Cyclical fluctuations
Time series such as GNP, price index, production, employment and
unemployment exhibit business cycle. Starting at the bottom of recession, when
Econometrics: Module-II
Bedru B. and Seid H
economic recovery starts, most of these series move upward. In this upswing, the
value of a series at one point in time is greater than its previous value. Thus, there
is a momentum built in to them, and it continues until something happens (e.g.
increase in interest rate or tax) to slowdown them. Therefore, regression involving
time series data, successive observations are likely to be interdependent.
b. Specification bias
This arises because of the following.
i. Exclusion of variables from the regression model
ii. Incorrect functional form of the model
iii. Neglecting lagged terms from the regression model
Let’s see one by one how the above specification biases causes autocorrelation.
i. Exclusion of variables: as we have discussed in chapter one (module I), there
are several sources of the random disturbance term (ui). One of these is
exclusion of variable(s) from the model. This error term will show a
systematic change as this variable changes. For example, suppose the correct
demand model is given by:
yt = α + β 1 x1t + β 2 x 2t + β 31 x3t + U t − − − − − − − − − − − − 3.21
where
y = quantity of beef demanded, x1 = price of beef, x 2 = consumer
income, x3 = price of pork and t = time. Now, suppose we run the following
regression in lieu of (3.21):
yt = α + β 1 x1t + β 2 x 2t + Vt − − − − − − − − − − − − ------3.22
Now, if equation 3.21 is the ‘correct’ model or true relation, running equation
3.22 is the tantamount to letting Vt = β 3 x3t + U t . And to the extent the price of
pork affects the consumption of beef, the error or disturbance term V will reflect
a systematic pattern, thus creating autocorrelation. A simple test of this would
be to run both equation 3.21 and equation 3.22 and see whether autocorrelation,
Econometrics: Module-II
Bedru B. and Seid H
if any, observed in equation 3.22 disappears when equation 3.21 is run. The
actual mechanics of detecting autocorrelation will be discussed latter.
ii. Incorrect functional form: This is also one source of the autocorrelation of
error term. Suppose the ‘true’ or correct model in a cost-output study is as
follows.
Marginal cost= α 0 + β1output i + β 2 output i 2 + U i − − − − − − − − − − − − 3.23
However, we incorrectly fit the following model.
M arg inal cos t i = α 1 + α 2 output i + Vi -------------------------------3.24
The marginal cost curve corresponding to the ‘true’ model is shown in the figure
below along with the ‘incorrect’ linear cost curve.
As the figure shows, between points A and B the linear marginal cost curve
will consistently over estimate the true marginal cost; whereas, outside these
points it will consistently underestimate the true marginal cost. This result is
to be expected because the disturbance term Vi is, in fact, equal to (output)2+
ui, and hence will catch the systematic effect of the (output)2 term on the
marginal cost. In this case, Vi will reflect autocorrelation because of the use
of an incorrect functional form.
iii. Neglecting lagged term from the model: - If the dependent variable of a
certain regression model is to be affected by the lagged value of itself or the
Econometrics: Module-II
Bedru B. and Seid H
explanatory variable and is not included in the model, the error term of the
incorrect model will reflect a systematic pattern which indicates
autocorrelation in the model. Suppose the correct model for consumption
expenditure is:
C t = α + β 1 y t + β 2 y t −1 + U t -----------------------------------3.25
but again for some reason we incorrectly regress:
C t = α + β 1 y t + Vt ---------------------------------------------3.26
As in the case in (3.21) and (3.22); Vt = β 2 y t −1 + U t
Hence, Vt shows systematic change reflecting autocrrelation.
42.4 Matrix representation of autocorrelation
The
variance-covariance matrix of the error terms developed in chapter two (module I)
is:
Ε(u i2 ) Ε(u1u 2 )............ Ε(u1u n )
Ε(u u ) Ε(u 2 )................ Ε(u u )
2 1
2 n
2
Ε(UU ' ) =
:
:
:
Ε(u u ) Ε(u u )............. Ε(u 2 )
n 1
n 2
n
In the case of the assumption of non-autocorrelation and homoscedasticity.
Ε(UU ' ) =
σ2
0
0
:
0
σ2
:
0
........
........
1 0 ........ 0
= σ 2 0 1 ........ 0 = σ 2 I --------3.27
n
: :
:
1
σ 2
0 0
0
0
:
The assumption of no autocorrelation is responsible for the appearance of zero offthe diagonals, whereas the assumption of homoscedasticity establishes the equality
of diagonal terms. The Following three examples of variance-covariance matrices
help to understand the concept of autocorrelation and hetroscedasticity.
Econometrics: Module-II
Bedru B. and Seid H
3 0 0
0 5 0
0 0 3
Hetroscedasticity with
no autocorrelation
1
1
2
1
1
2
1
1
2
0
1
2
1
3
1
2
1
4
1
2
1
1
2
2
2
1
4
1
Homoscedasticity
Hetroscedasticity with
with autocorrelation
autocorrelation
4.2.5 The coefficient of autocorrelation
Autocorrelation, as stated earlier, is a kind of lag correlation between successive
values of same variables. Thus, we treat autocorrelation in the same way as
correlation in general. A simple case of linear correlation is termed here as
autocorrelation of first order. In other words, if the value of U in any particular
period depends on its own value in the preceding period alone, we say that U’s
follow a first order autoregressive scheme AR(1) (or first order Markove scheme)
i.e. u t = f (u t −1 ) . ------------------------- - -------------3.28
If ut depends on the values of the two previous periods, then:
u t = f (u t −1 , u t − 2 ) ---------------------------------- 3.29
This form of autocorrelation is called a second order autoregressive scheme and so
on. Generally when autocorrelation is present, we assume simple first form of
autocorrelation: ut = f(ut-1) and also in the linear form:
u t = ρu t −1 + vt --------------------------------------------3.30
where ρ the coefficient of autocorrelation and V is a random variable satisfying
all the basic assumption of ordinary least square.
Ε(v 2 ) = σ v2
Ε(v) = 0,
and
Ε (v i v j ) = 0
for i ≠ j
The above relationship states the simplest possible form of autocorrelation; if we
apply OLS on the model given in ( 3.30) we obtain:
n
∑u u
t
ρ̂ =
t −1
t =2
n
∑u
--------------------------------3.31
2
t −1
t =2
Econometrics: Module-II
Bedru B. and Seid H
Given that for large samples: Σu t2 ≈ Σu t2−1 , we observe that coefficient of
autocorrelation ρ represents a simple correlation coefficient r.
n
ρˆ =
∑ ut u t −1
t =2
n
∑u
t =2
2
t −1
n
=
n
∑ ut ut −1
∑ u 2 t −1
t =2
n
∑u u
t
t =2
2
=
t −1
t =2
Σu t2 Σu t2−1
= rut
u t −1
(Why?)---------------------3.32
⇒ −1 ≤ ρˆ ≤ 1 since − 1 ≤ r ≤ 1 ---------------------------------------------3.33
This proves the statement “we can treat autocorrelation in the same way as
correlation in general”. From our statistics background we know that:
if the value of r is 1 we call it perfect positive correlation,
if r is -1 , perfect negative correlation and
if the value of r is 0 ,there is no correlation.
By the same analogy if the value of ρ̂ is 1 it is called perfect positive
autocorrelation, if ρ̂ is -1 it is called perfect negative autocorrelation and if ρ = 0 ,
no autocorrelation.
If ρ̂ =0 in u t = ρu t − 1 + v t i.e. u t is not correlated.
4.2.6 Mean, Variance and Covariance of Disturbance Terms in Autocorrelated
Model: To examine the consequences of autocorrelation on ordinary least square
estimators, it is required to study the properties of U. If the values of U are found
to be correlated with simple markove process, then it becomes:
U t = ρu t −1 + vt with / ρ / ≤ 1
vt fulfilling all the usual assumptions of a disturbance term.
Our objective, here is to obtain value of u t in terms of autocorrelation coefficient
ρ and random variable vt . The complete form of the first order autoregressive
scheme may be discussed as under:
Econometrics: Module-II
Bedru B. and Seid H
U t = f (U t −1 ) = ρU t −1 + vt
U t −1 = f (U t − 2 ) = ρU t − 2 + vt −1
U t − 2 = f (U t −3 ) = ρU t −3 + vt − 2
U t − r = f (U t −( r +1) ) = ρU t − ( r +1) + vt − r
We make use of above relations to perform continuous substitutions in
U t = ρu t −1 + vt as follows.
U t = ρU t −1 + vt
= ρ ( ρU t − 2 + vt −1 ) + vt , u t −1 = ρU t − 2 + vt −1
= ρ 2U t − 2 + ρvt −1 + vt
= ρ 2 ( ρU t −3 + vt −3 ) + ( ρvt −1 + vt )
U t = ρ 3U t −3 + ρ 2 vt −3 + ρvt −1 + vt
In this way, if we continue the substitution process for r periods (assuming that r is
very large), we shall obtain:
U t = vt + ρvt −1 + ρ 2 vt − 2 + ρ 3 vt −3 + − − − − − − − − -------------3.35
ρ r → 0 since / ρ / ≤ 1
∞
u t = ∑ ρ r vt − r -----------------------------------------------------------3.36
r =0
Now, using this value of u t , let’s compute its mean, variance and covariance
1. To obtain mean
∞
Ε(U t ) = Ε ∑ ρ r vt − r = Σρ r Ε(vt − r ) = 0 since Ε(vt − r ) = 0 ----------3.37
r =0
In other words, we found that the mean of autocorrelated U’s turns out to be zero.
2. To obtain variance
By the definition of variance
2
∞
∞
∞
Ε(U ) = Ε ∑ ρ r vt − r = ∑ ( ρ r ) 2 Ε(vt − r ) 2 = ∑ ( ρ r ) 2 var(Vt − r ) ;since
r =0
r =0
r =0
2
var(vt − r ) = E (Vt − r )
2
i
∞
1
= ∑ ρ 2 r σ 2 = σ 2 (1 + ρ 2 + ρ 4 + ρ 6 + ................ + ∞) = ρ 2
2
r =0
1 − ρ
σ2
--------------------------------(3.38) ; Since / ρ / < 1
(1 − ρ 2 )
σ2
Thus, variance of autocorrelated u i is
which is constant value.
1− ρ 2
var(U t ) =
Econometrics: Module-II
Bedru B. and Seid H
From the above, the variance of Ui depends on the nature of variance of Vi. If the
variance of Vi is homoscedaistic, Ui is homomscedastic and if Vi is hetroscedastic,
Ui is hetroscedastic.
3. To obtain covariance:
By the definition of covariance:
= E (U tU t −1 ) ------------------------------------------------------------------------(3.39 )
Since u t = vt + ρvt −1 + ρ 2 vt −2 + ........
∴U t −1 = vt −1 + ρvt − 2 + ρ 2 vt −3 + ........
Substituting the above two equations in equation 3.39, we obtain
cov(U tU t −1 ) = Ε(vt + ρvt −1 + ρ 2 vt − 2 + ........)(vt −1 + ρvt − 2 + ρ 2 vt −3 + ........)
= Ε{vt + ρ (vt −1 + ρvt − 2 + ........)}(vt −1 + ρvt − 2 + ρ 2 vt −3 + ........)
= Ε[vt (vt −1 + ρvt − 2 + ........) + Ε( ρ (vt −1 + ρvt − 2 + ........) 2 ] ; since E (vt vt − r ) = 0
= 0 + Ε( ρ (vt −1 + ρvt − 2 + ........) 2 )
= Ε( ρ (vt −1 + ρvt − 2 + ........) 2 )
= ρΕ(vt −1 + ρ 2 vt − 2 + ...... + 2 times cross products)
2
2
= ρ (σ v2 + ρ 2σ v2 + ...... + 0)
= ρ (σ v2 (1 + ρ 2 + ρ 4 + ......)
ρσ 2
since ρ < 1 --------------------------------------------------------3.40
1− ρ 2
ρσ v2
∴ cov(U t , U t −1 ) =
= ρσ u2 ……………………………………………….3.41
1− ρ 2
Similarly
cov(u t , u t −2 ) = ρ 2σ u2 ………………………………………….3.42
cov(U t , U t −3 ) = ρ 3σ u2 ….........................................................................3.43
=
and generalizing cov(U t ,U t − s ) = ρ sσ u2 (for s ≠ t ) . Summarizing on the bases of
the preceding discussions, we find that when ut’s are autocorrelated, then:
σ2
U t ~ N 0, v 2 and; E ( U tU t − r ) ≠ 0 --------------------------------3.44
1- ρ
Econometrics: Module-II
Bedru B. and Seid H
4.2.7 Effect of Autocorrelation on OLS Estimators.
We have seen that ordinary least square technique is based on basic assumptions.
Some of the basic assumptions are with respect to mean, variance and covariance
of disturbance term. Naturally, therefore, if these assumptions do not hold good on
what so ever account, the estimators derived by OLS procedure may not be
efficient. Now, we are in a position to examine the effect of autocorrelation on
OLS estimators. Following are effects on the estimators if OLS method is applied
in presence of autocorrelation in the given data.
1. OLS estimates are unbiased
We know that: β̂ = β + Σk i u i
Ε( βˆ ) = β + Σk i Ε(u i ) ⇒ We proved Ε(u i ) = 0 -- from (3.37). Therefore, Ε( βˆ ) = β
2. The variance of OLS estimates is inefficient.
The variance of estimate β̂ in simple regression model will be biased down wards
(i.e. underestimated) when u’s are auto correlated. It can be shown as follows.
β̂ = β + Σk i u i ; ⇒ βˆ − β = Σk i wi
We know that:
Var ( βˆ ) = Ε( βˆ − β ) 2 = Ε(Σk i u i ) 2
2
2
= Ε(k1u1 + k 2 u 2 + ...... + k n u n ) 2 = Ε(k1 u1 + k 22 u 22 + ....... + k n2 u n2 + 2k1k 2 u1u 2 + .... + 2k n −1 k n u n −1u n )
= Ε(∑ k i u i + 2Σk i k j u i u j )
2
2
2
= Σk i Ε(u i ) 2 + 2Σk i k j Ε(u i u j )
If Ε(u i u j ) = 0 which means if there is no autocorrelation, the last term disappears
so that: var(βˆ ) = σ u2 Σk i2 =
σ u2
Σx 2
However, we proved that Ε(u t u t − s ) ≠ 0 but equal to ρ sσ u2
xi x j
σ2
∴Var ( βˆ ) = 2 + 2σ u2 Σ
ρ 2 ---------------------------3.45
Σx
(Σxi2 ) 2
In the absence of autocorrelation Var ( βˆ ) =
σ2
Σx 2
Econometrics: Module-II
Bedru B. and Seid H
But in the presence of autocorrelation
var(βˆ ) auto = var(βˆ ) nonauto + 2σ u2 Σ
xi x j
(Σx )
2 2
i
ρ s ----------------------------3.46
-If ρ is positive and x is positively correlated
Var ( βˆ ) auto > Var ( βˆ ) nonauto .
σ2
The implication is if wrongly use Var ( βˆ ) = 2 while the data is autocorrelated.
Σx
var(β ) is underestimated because if the data is autocorrelated the true variance is
xi x j
σ2
σ2
2
2
+
2
σ
Σ
ρ
not
.
u
Σx 2
(Σxi2 ) 2
Σx 2
In the case the explanatory variable X of the model is random, the covariance of
successive values is zero (Σxi x j = 0) , under such circumstance the bias in
var(β ) will not be serious even though u is autocorrelated.
3. Wrong Testing Procedure
If var(βˆ ) is underestimated, SE ( βˆ ) is also underestimated, this makes t-ratio large.
This large t-ratio may make β̂ statistically significant while it may not.
4. Wrong testing procedure will make wrong prediction and inference about the
characteristics of the population.
4.2.8 Detection (Testing) of Autocorrelation
There are two methods that are commonly used to detect the existence or absence
of autocorrelation in the disturbance terms. These are:
1. Graphic method
Dear distance student, you recalled from section 3.2.2 that autocorrelation can be
presented in graphs in two ways. Detection of autocorrelation using graphs will be
based on these two ways.
Given a data of economic variables, autocorrelation can be detected in this data
using graphs in the following two procedures.
Econometrics: Module-II
Bedru B. and Seid H
a. Apply OLS to the given data whether it is auto correlated or not and obtain
the error terms. Plot et horizontally and et −1 vertically. i.e. plot the
following observations (e1 , e2 ), (e2 , e3 ), (e3 , e4 ).......(en , en +1 ) .If on plotting, it is
found that most of he points fall in quadrant I and III, as shown in fig (a)
below, we say that the given data is autocorrelated and the type of
autocorrelation is positive autocorrelation. If most of the points fall in
quadrant II and IV, as shown in fig (b) below the autocorrelatioin is said to
be negative. But if the points are scattered equally in all the quadrants as
shown in fig (c) below, then we say there is no autocorrelation in the given
data.
Econometrics: Module-II
Bedru B. and Seid H
2. Formal testing method
This method is called formal because the testis based on the formal testing
procedure you have seen in your statistics course. It is based on either the z-test, ttest, F-test or X2 test. If a test applies any of the above, it is called formal testing
method. Different econometricians and statisticians suggest different types of
testing methods. But, the most frequently and widely used testing methods by
researchers are the following.
A. Run test: Before going to the detail analysis of this method, let us define what
a run is in this context. Run is the number of positive and negative signs of the
error term arranged in sequence according to the values of the explanatory
variables, like “++++++++-------------++++++++------------++++++”
By examining how runs behave in a strictly random sequence of observations one
can derive a test of randomness of runs. We ask this question: are the observed
runs too many or too few compared with number of runs expected? If there are
too many runs, if would mean the Uˆ ' s change sign frequently, thus indicating
negative serial correlation. Similarly, if there are too few runs, they may suggest
positive autocorrelation.
Now let: n = total number of observations = n1 + n2
n1 = number of + symbols; n2 = number of – symbols; and k = number of runs
Under the null hypothesis that successive outcomes (here, residuals) are
independent, and assuming that n1 > 10 and n2 > 10 , the number of runs is
distributed (asymptotically) normally with:
Mean: Ε(k ) =
2n1 n 2
+1
n1 + n 2
Variance: σ k2 =
2n1 n2 (2n1n 2 − n1 − n 2 )
(n1 + n 2 ) 2 (n1 + n 2 − 1)
Econometrics: Module-II
Bedru B. and Seid H
Decision rule: Do not reject the null hypothesis of randomness or independence
with 95% confidence. If [Ε(k ) − 1.96σ k ≤ k ≤ 1.96σ k ]; reject the null hypothesis if
the estimated k lies outside these limits.
In a hypothetical example of n1 = 14,
Ε(k ) = 16.75,
n2 = 18 and k = 5 we obtain
σ k2 = 7.49395 ⇒ σ k = 2.7375
Hence the 95% confidence interval is:
[16.75 ± 1.96(2.7375)] = [11.3845,22.1155]
since k=5, it clearly falls outside this interval. There fore we can reject the
hypothesis that the observed sequence of residuals is random (are of independent)
with 95% confidence.
B. The Durbin-Watson d test: The most celebrated test for detecting serial
correlation is one that is developed by statisticians Durbin and Waston. It is
popularly known as the Durbin-Waston d statistic, which is defined as:
t =n
d=
∑ (e
t
− et −1 ) 2
t =2
t =n
∑e
------------------------------------3.47
2
t
t =1
Note that, in the numerator of d statistic the number of observations is n − 1
because one observation is lost in taking successive differences.
It is important to note the assumptions underlying the d-statistics
1. The regression model includes an intercept term. If such term is not present,
as in the case of the regression through the origin, it is essential to rerun the
regression including the intercept term to obtain the RSS.
Econometrics: Module-II
Bedru B. and Seid H
2. The explanatory variables, the X’s, are non-stochastic, or fixed in repeated
sampling.
3. The disturbances U t are generated by the first order auto regressive scheme:
Vt = ρu t −1 + ε t
4. The regression model does not include lagged value of Y the dependent
variable as one of the explanatory variables. Thus, the test is inapplicable
to models of the following type
yt = β1 + β 2 X 2t + β 3 X 3t + ....... + β k X kt + ry t −1 + U t
Where y t −1 the one period lagged value of y is such models are known as
autoregressive models. If d-test is applied mistakenly, the value of d in such
cases will often be around 2, which is the value of d in the absence of first
order autocorrelation. Durbin developed the so-called h-statistic to test
serial correlation in such autoregressive.
5. There are no missing observations in the data.
In using the Durbin –Watson test, it is, there fore, to note that it can not be
applied in violation of any of the above five assumptions.
t =n
Dear distance student, from equation 3.47 the value of d =
∑ (e
t
− et −1 ) 2
t =2
t =n
∑e
2
t
t =1
Squaring the numerator of the above equation, we obtain
n
n
∑e + ∑e
2
t
d=
t =2
2
t −1
− 2Σet et −1
t =2
------------------3.48
Σet2
n
However, for large samples
∑e
t =2
n
2
t
≅ ∑ et2−1 because in both cases one
t =2
observation is lost. Thus,
Econometrics: Module-II
Bedru B. and Seid H
n
d=
2∑ et2
t =2
Σe
2
t
−+
2Σet et −1
Σe t
Σet et −1
d ≈ 2 1− n
et
∑
t =1
but ρ =
Σet et −1
from equation
Σet
d = 2(1 − ρˆ )
From the above relation, therefore
ρˆ = 0, d ≅ 2
if ρˆ = 1, d ≅ 0
ρˆ = −1, d ≅ 4
Thus we obtain two important conclusions
i.
Values of d lies between 0 and 4
ii.
If there is no autocorrelation ρˆ = 0, then d = 2
Whenever, therefore, the calculated value of d turns out to be sufficiently close to
2, we accept null hypothesis, and if it is close to zero or four, we reject the null
hypothesis that there is no autocorrelation.
However, because the exact value of d is never known, there exist ranges of values
with in which we can either accept or reject null hypothesis. We do not also have
unique critical value of d-stastics. We have d L -lower bound and d u upper bound
of he initial values of d to accept or reject the null hypothesis.
For the two-tailed Durbin Watson test, we have set five regions to the values of d
as depicted in the figure below.
Econometrics: Module-II
Bedru B. and Seid H
The mechanisms of the D.W test are as follows, assuming that the assumptions
underlying the tests are fulfilled.
Run the OLS regression and obtain the residuals
Obtain the computed value of d using the formula given in equation 3.47
For the given sample size and given number of explanatory variables, find
out critical d L and d U values.
Now follow the decision rules given below.
1. If d is less that d L or greater than (4 − d L ) we reject the null hypothesis of
no autocorrelation in favor of the alternative which implies existence of
autocorrelation.
2. If, d lies between d U and (4 − d U ) , accept the null hypothesis of no
autocorrelation
3. If how ever the value of d lies between d L and d U or between (4 − d U )
and (4 − d L ) , the D.W test is inconclusive.
Example 1. Suppose for a hypothetical model Y = α + β X + U i ,if we found
d = 0.1380 ; d L = 1.37; d U = 1.50
Based on the above values test for autocorrelation
Solution: First compute (4 − d L ) and (4 − d U ) and compare the computed value
of d with d L , d U , (4 − d L ) and (4 − d U )
(4 − d L ) =4-1.37=2.63
(4 − d U ) =4-1.5=2.50
Since d is less than
d L we reject the null hypothesis of no autocorrelation
Example 2. Consider the model Yt = α + βX t + U t with the following observation on X and Y
X
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Y
2
2
2
1
3
5
6
6
10
10
10
12
15
10
11
Econometrics: Module-II
Bedru B. and Seid H
Test for autocorrelation using Durbin -Watson method
Solution:
1. regress Y on X: i.e. Yt = α + βX t + U t :
From the above table we can compute the following values.
Σxy = 255,
Y = 7,
Σ(ei − et −1 ) 2 = 60.21
Σx 2 = 280,
X = 8,
Σet2 = 41.767
Σy 2 = 274
βˆ =
Σxy 255
=
= 0.91
Σx 2 280
αˆ = Y − βˆX = 7 − 0.91(8) = −0.29
Y = −0.29 + 0.91X + U i
Yˆ = 0.28 + 0.91X ,
R 2 = 0.85
Σ(et − et −1 ) 2 60.213
d=
=
= 1.442
41.767
Σet2
Values of d L and d U on 5% level of significance, with n=15 and one explanatory
variable are: d L =1.08 and d U =1.36.
(4 − d u ) = 2.64
d U < d < 4 − d U = (1.364 2.64)
d * = 1.442
Since d* lies between dU < d < 4 − dU , accept H0. This implies the data is autocorrelated.
Although D.W test is extremely popular, the d test has one great drawback in that
if it falls in the inconclusive zone or region, one cannot conclude whether
autocorrelation does or does not exist. Several authors have proposed
modifications of the D.W test.
Econometrics: Module-II
Bedru B. and Seid H
In many situations, however, it has been found that the upper limit d U is
approximately the true significance limit. Thus, the modified DW test is based on
d U in case the estimated d value lies in the inconclusive zone, one can use the
following modified d test procedure. Given the level of significance α ; if
1. ρ = 0 versus H 1 : ρ > 0 if the estimated d < dU , reject H0 at level α , that is
there is statistically significant positive correlation.
2. H 0 : ρ = 0 versus H 1 : ρ ≠ 0 if the estimated d < dU or (4 − d u ) < dU reject H0
at level 2α statistically there is significant evidence of autocorrelation,
positive or negative.
4.2.9 Remedial Measures for the problems of Autocorrelation
Since in the presence of serial correlation the OLS estimators are inefficient, it is
essential to seek remedial measures. The remedy however depends on what
knowledge one has about the nature of interdependence among the disturbances. :
This means the remedy depends on whether the coefficient of autocorrelation is
known or not known.
A. when ρ is known- When the structure of autocorrelation is known, i.e ρ is
known, the appropriate corrective procedure is to transform the original model or
data so that error term of the transformed model or data is non auto correlated.
When we transform, we are wippiy of the effect of ρ .
Suppose that our model is
Yt = α + β X t + U t − − − − − − − − 3.49
and
U t = ρU t −1 + Vt ,
| ρ |< 1 − − − − 3.50
Econometrics: Module-II
Bedru B. and Seid H
Equation (3.50) indicates the existence of autocorrelation. If ρ is known, then
transform Equation (3.49) into one that is not autocorrelated. The procedure of
transformation will be given below.
Take the lagged form of equation (1) and multiply through by ρ ..
ρ y = ρα + ρβ X t −1 + ρU t −1 − − − − − − − − 3.51
t −1
Subtracting (3) from (1), we have:
Yt − ρYt −1 = (α − ρα ) + ( β X t − ρβX t −1 ) + (U t − ρU t −1 ) − − − − − 3.52
By rearranging the terms in (3.50), we have
Vt = U t − ρU t −1
which on substituting the last term of (3.52) gives
Yt − ρYt −1 = (α − ρα ) + β ( X t − ρX t −1 ) + vt − − − − − − − 3.53
Let:
Yt* = Y − ρy t −1
a = α − ρα = α (1 − ρ )
X t* = X t − ρX t −1
Equation (3.53) may be written as:
Yt* = a + BX t* + vt − − − − − − − −(3.54)
It may be noted that in transforming Equation (3.49) into (3.54) one observation
shall be lost because of lagging and subtracting in (3.52). We can apply OLS to
the transformed relation in (3.54) to obtain αˆ and βˆ for our two
parameters α and β .
αˆ =
aˆ
and it can be shown that
1− ρ
2
1
var αˆ =
var(aˆ )
1− ρ
Econometrics: Module-II
Bedru B. and Seid H
Because α̂ is perfectly and linearly related to â .
Again since vt satisfies all
standards assumptions, the variance of αˆ and βˆ would be given by our standard
OLS formulae.
var(αˆ ) =
σ u2 ΣX t2 *
n
n∑ ( X t* − X ) 2
, var(βˆ ) =
σ u2
n
∑ (ΣX
*
t
− X t* ) 2
ti
Estimators obtained in equation 6 are efficient, only if our sample size is large so
that loss of one observation becomes negligible.
B. When ρ is not known
When ρ is not known, we will describe the methods through which the coefficient
of autocorrelation can be estimated.
Method I: A priori information on ρ
Many times an investigator makes some reasonable guess about the value of
autoregressive coefficient by using his knowledge or institution about the
relationship under study. Many researchers usually assume that ρ =1 or -1.
Under this method, the process of transformation is the same as when ρ is known.
When ρ =1, the transformed model becomes;
(Yt − Yt −1 ) = ( X t − X t −1 ) + Vt ; where Vt = U t − U t −1
Note that the constant term is suppressed in the above. B̂ is obtained by taking
merely the first differences of the variable and obtaining line that passes through
the origin. Suppose that one assumes ρ =-1 instead of ρ =1, i.e the case of perfect
negative autocorrelation. In such a case, the transformed model becomes:
Yt + Yt −1 = 2α + β ( X t + X t −1 ) + vt
Or
Yt + Yt −1
( X t + X t −1 ) vt
=α +β
+
2
2
2
Econometrics: Module-II
Bedru B. and Seid H
This model is then called two period moving average regression model because
Yt + Yt −1
on
2
actually we are regressing the value of one moving average
( X t + X t −1 )
2
another
This method of first difference in quite popular in applied research for its
simplicity. But the method rests on the assumption that either there is perfect
positive or perfect negative autocorrelation in the data.
Method II: Estimation of ρ from d-statistic: From equation ( 3.47 ), we obtained
d ≈ 2(1 − ρˆ ) . Suppose we calculate certain value of d-statistic in the case of certain
d ≈ 2(1 − ρˆ )
data. Given the d-value we can estimate ρ from this.
1
⇒ ρˆ ≈ 1 − d
2
As already pointed out, ρ̂ will not be accurate if the sample size is small. The
above relationship is true only for large samples. For small samples, Theil and
Nagar have suggested the following relation:
ρˆ =
n 2 (1 − d 2 ) + k 2
………………………………………………..3.55
n2 − k 2
where n=total number of observation; d= Durbin Watson statistic ; k=number of
coefficients (including intercept term). Using this value of ρ̂ we can perform the
above transformation to avoid autocorrelation from the model.
Method III: The Cochrane-Orcutt iterative procedure: In this method, we
remove autocorrelation gradually starting from the simplest form of a first order
scheme. First we obtain the residuals and apply OLS to them;
et = ρet −1 + vt …………………………………………………….3.56
We estimate ρ̂ from the above relation. With the estimated ρ̂ , we transform the
Econometrics: Module-II
Bedru B. and Seid H
original data and then apply OLS to the model.
(Yt − ρˆYt −1 ) = α (1 − ρˆ ) + β ( X t − ρˆX t −1 ) + Vt − ρˆu t −1 ……………......…3.57
we once again apply OLS to the newly obtained residuals
et* = ρet*−1 + wt ……………………………………………………………3.58
We use this second estimate ρ̂ˆ to transform the original observations and so on
we keep proceeding until the value of the estimate of ρ converges. It can be
shown that the procedure is convergent. When the data is transformed only by
using this second stage estimate of ρ , it is then called two stages Cochrane-Orcutt
method. However one can follow an alternative approach to use at each step of
interaction, the Durbin Watson d-statistic to residuals for autocorrelation or till the
estimates of ρ do not differ substantially from one another.
Method IV: Durbin’s two-stage method: Assuming the first order autoregressive
scheme, Durbin suggests a two-stage procedure for resolving the serial correlation
problem. The steps under this method are:
Given Yt = α + β X t + u t -----------------------------------(3.59)
U t = ρU t −1 + vt
1. Take the lagged term of the above and multiply by ρ
ρYt −1 = ρα + ρβX t −1 + ρu t −1 --------------------------(3.60)
2. Subtract (3.60) from (3.59)
Yt − ρYt −1 = α (1 − ρ ) + β ( X t − ρX t −1 ) + u t − ρu t −1 ------(3.61)
3. Rewrite (3.61) in the following form
Yt = α (1 − ρ ) + ρYt −1 + β X t − βρ X t −1 + vt
Yt = α * + ρYt −1 + β X t − γX t −1 + vt
Econometrics: Module-II
Bedru B. and Seid H
This equation is now treated as regression equation with three explanatory
variables X t , X t −1 and Yt −1 . This provides estimate of ρ which is used to construct
new variables (Yt − ρˆYt −1 ) and ( X t − ρˆX t −1 ). In the second step, estimators of
α and β are obtained from the regression equation:
(Yt − ρˆYt −1 ) = α * + β ( X t − ρˆX t −1 ) + u t* ; where α * = α (1 − ρ )
4.3 Multicollinearity
4.3.1 The nature of Multicollinearity
Originally, multicollinearity meant the existence of a “perfect” or exact, linear
relationship among some or all explanatory variables of a regression model. For kvariable regression involving explanatory variables x1 , x 2 ,......, x k , an exact linear
relationship is said to exist if the following condition is satisfied.
λ1 x1 + λ 2 x 2 + ....... + λ k x k + vi = 0 − − − − − − (1)
where λ1 , λ 2 ,.....λ k are constants such that not all of them are simultaneously zero.
Today, however , the term multicollineaity is used in a broader sense to include
the case of perfect multicollinearity as shown by (1) as well as the case where the
x-variables are inter-correlated but not perfectly so as follows
λ1 x1 + λ 2 x 2 + ....... + λ 2 x k + vi = 0 − − − − − − (1)
where vi is the stochastic error term.
The nature of multicollinarity can be illustrated using the figures below. Let, in
the figures y, x1 , & x 2 and represent respectively the variation in y (the dependent
variable) and x1and x2 (explanatory variables). The degree of collinearity can be
measured by the extent of overlap (shaded area) of the x1 and x2. In the fig.(a)
below there is no overlap between x1 and x 2 and hence no collinearity. In figs. ‘b’
through ‘e’, there is “low” to “high” degree of collinearity. In the extreme if
x1 and x 2 were to overlap completely (or if x1 is completely inside x2, or vice
versa), Collinearity would be perfect.
Econometrics: Module-II
Bedru B. and Seid H
Note that: multicollinearity refers only to linear relationships among the xvariables. It does not rule out non-linear relationships among the x-variables.
For example: Y = α + β 1 xi + β 1 xi2 + β1 xi3 + vi − − − − − − (3.31)
Where: Y-Total cost and X-output.
The variables xi2 and xi3 are obviously functionally related to xi but the relationship
is non-linear. Strictly, therefore, models such (3.31) do not violate the assumption
of no multicollineaity.
However, in concrete applications, the conventionally
measured correlation coefficient will show xi , xi2 and xi3 to be highly correlated,
which as we shall show, will make it difficult to estimate the parameters with
greater precision (i.e. with smaller standard errors).
4.3.2 Reasons for Multicollinearity
1. The data collection method employed: Example: If we regress on small
sample values of the population; there may be multicollinearity but if we
take all the possible values, it may not show multicollinearity.
2. Constraint over the model or in the population being sampled.
Econometrics: Module-II
Bedru B. and Seid H
For example: in the regression of electricity consumption on income (x1)
and house size (x2), there is a physical constraint in the population in that
families with higher income generally have larger homes than with lower
incomes.
3. Overdetermined model: This happens when the model has more
explanatory variables than the number of observations. This could happen
in medical research where there may be a small number of patients about
whom information is collected on a large number of variables.
4.3.3 Consequences of Multicollinearity
Why does the classical linear regression model put the assumption of no
multicollinearity among the X’s? It is because of the following consequences of
multicollinearity on OLS estimators.
1. If multicollinearity is perfect, the regression coefficients of the X variables are
indeterminate and their standard errors are infinite.
Proof: - Consider a multiple regression model with two explanatory variables,
where the dependent and independent variables are given in deviation form as
follows. y i = βˆ 1 x 1 i + βˆ 2 x 2 i + e i
Dear distance student, do you recall the formulas of β̂1 and β̂ 2 from our discussion
of multiple regression?
βˆ 1 =
Σ x 1 y Σ x 22 − Σ x 2 y Σ x 1 x 2
Σ x 12i Σ x 22 − ( Σ x 1 x 2 ) 2
βˆ 1 =
Σ x 2 y Σ x 12 − Σ x 1 y Σ x 1 x 2
Σ x 12 Σ x 22 − ( Σ x 1 x 2 ) 2
Assume x 2 = λx1 ------------------------3.32
Where λ is non-zero constants. Substitute 3.32in the above β̂1 and β̂ 2 formula:
βˆ
1
Σ x1 yΣ (λ x1 ) 2 − Σ λ x1 yΣ x1λ x1
=
Σ x 12i Σ ( λ x 1 ) 2 − ( Σ x 1 λ x 1 ) 2
Econometrics: Module-II
Bedru B. and Seid H
=
Σ x1 yλ 2 Σ x1
λ (Σ x
2
2
1
)
2
2
− λ Σ x1 yΣ x1
− λ
2
2
(Σ x1 )
2
2
=
0
0
⇒ indeterminate.
Applying the same procedure, we obtain similar result (indeterminate value) for
β̂ 2 . Likewise, from our discussion of multiple regression model, variance of β̂1 is
given by : var(βˆ1 ) =
σ 2 Σx 22
Σx12 Σx12 − (Σx1 x 2 ) 2
Substituting x 2 = λx1 in the above variance formula, we get:
σ 2 λ 2 Σx12
= 2
λ (Σx12 ) 2 − λ2 (Σx12 ) 2
=
σ 2 λ2 Σx12
0
=∞
⇒ infinite.
These are the consequences of perfect multicollinearity. One may raise the
question on consequences of less than perfect correlation. In cases of near or high
multicollinearity, one is likely to encounter the following consequences.
2. If multicollineaity is less than perfect (i.e near or high multicollinearity), the
regression coefficients are determinate
Proof: Consider the two explanatory variables model above in deviation form.
If we assume x 2 = λx1 it indicates us perfect correlation between x1 and x 2
because the change in x2 is completely because of the change in x1.Instead of exact
multicollinearity, we may have: x 2i = λx1i + vt Where λ ≠ 0, vt is stochastic error
term such that Σxi vi = 0 . In this case x2 is not only determined by x1,but also
affected by some other variables given by vi (stochastic error term).
Substitute x 2 = λx1i + vt in the formula of β̂1 above
βˆ1 =
Σx1 yΣx 22 − Σx 2 yΣx1 x 2
Σx12i Σx 22 − (Σx1 x 2 ) 2
Econometrics: Module-II
Bedru B. and Seid H
Σx1 yλ2 Σx12 + Σvi2 − (λΣyi x1i + Σy i vi )λΣx12i
=
Σx 22i (λ2 Σx 22i + Σvi2 ) − (λΣx12 ) 2
≠
0
⇒ determinate.
0
This proves that if we have less than perfect multicollinearity the OLS coefficients
are determinate.
The implication of indetermination of regression coefficients in the case of perfect
multicolinearity is that it is not possible to observe the separate influence of
x1 and x 2 . But such extreme case is not very frequent in practical applications.
Most data exhibit less than perfect multicollinearity.
3. If multicollineaity is less than perfect (i.e. near or high multicollinearity) , OLS
estimators retain the property of BLUE
Explanation:
Note: While we were proving the BLUE property of OLS estimators in simple
and multiple regression models(module-I); we did not make use of the assumption
of no multicollinearity. Hence, if the basic assumptions which are important to
prove the BLUE property are not violated ,whether multicollinearity exist or not
,the OLS estimators are BLUE .
3. Although BLUE, the OLS estimators have large variances and covariances.
var(βˆ 2 ) =
σ 2 Σx 22
Σx12 Σx 22 − (Σx1 x 2 ) 2
Multiply the numerator and the denominator by
σ 2 Σx 22 .
var(βˆ 2 ) =
(Σx Σx
2
1
=
2
2
1
2
Σx 2
)
− (Σx1 x 2 ) 2 .
1
2
Σx 2
Σx 2
Σx12 −
2
σ2
=
σ2
(Σx1 x 2 ) 2
Σx12 − 1 −
Σx12 Σx12
1
=
(Σx1 x 2 ) 2
Σx12
σ2
Σx12 − (1 − r122 )
Where r122 is the square of correlation coefficient between x1 and x 2 ,
Econometrics: Module-II
Bedru B. and Seid H
If x 2 = x1i + vi , what happen to the variance of β̂1 as r122 is line rises.
As r12 tends to 1 or as collinearity increases, the variance of the estimator increase
and in the limit when r12 = 1 variance of β̂1 becomes infinite.
Similarly cov(β 1 , β 2 ) =
− r12σ 2
(1 − r122 ) Σx12 Σx12
.
(why?)
As r12 increases to ward one, the covariance of the two estimators increase in
absolute value. The speed with which variances and covariance increase can be
seen with the variance-inflating factor (VIF) which is defined as:
VIF =
1
1 − r122
VIF shows how the variance of an estimator is inflated by the presence of
multicollinearity. As r122 approaches 1, the VIF approaches infinity. That is, as the
extent of collinearity increase, the variance of an estimator increases and in the
limit the variance becomes infinite. As can be seen, if there is no multicollinearity
between x1 and x 2 , VIF will be 1.
Using this definition we can express var(β1 ) and var(βˆ 2 ) interms of VIF
σ2
σ2
ˆ
ˆ
var(β 1 ) = 2 VIF and var(β 2 ) = 2 VIF
Σx1
Σx 2
Which shows that variances of βˆ1 and βˆ 2 are directly proportional to the VIF.
4. Because of the large variance of the estimators, which means large standard
errors, the confidence interval tend to be much wider, leading to the acceptance of
“zero null hypothesis” (i.e. the true population coefficient is zero) more readily.
5. Because of large standard error of the estimators, the computed t-ratio will be
very small leading one or more of the coefficients tend to be statistically
insignificant when tested individually.
Econometrics: Module-II
Bedru B. and Seid H
6. Although the t-ratio of one or more of the coefficients is very small (which
makes the coefficients statistically insignificant individually), R2, the overall
measure of goodness of fit, can be very high.
Example: if y = α + β 1 x1 + β 2 x 2 + .... + β k x k + vi
In the cases of high collinearity, it is possible to find that one or more of the partial
slope coefficients are individually statistically insignificant on the basis of t-test.
But the R2 in such situations may be so high say in excess of 0.9.in such a case on
the basis of F test one can convincingly reject the hypothesis that
β1 = β 2 = − − − = β k = 0 Indeed, this is one of the signals of multicollinearity-
insignificant t-values but a high overall R2 (i.e a significant F-value).
7. The OLS estimators and their standard errors can be sensitive to small change
in the data.
Dear Readers! These are the major consequences of near or high multicolinearity.
If you have any comments or suggestion, you are welcome!
4.3.4 Detection of Multicollinearity
A recognizable set of symptoms for the existence of multicollinearity on which
one can rely are:
a. High coefficient of determination ( R2)
b. High correlation coefficients among the explanatory variables (rx x ' s )
i
j
c. Large standard errors and smaller t-ratio of the regression parameters
Note: None of the symptoms by itself are a satisfactory indicator of
multicollinearity. Because:
i. Large standard errors may arise for various reasons and not only because of the
presence so linear relationships among explanatory variables.
Econometrics: Module-II
Bedru B. and Seid H
ii. A high rx x is only sufficient but not a necessary condition (adequate condition)
i
j
for the existence of multicollinearity because multicollinearity can also exist even
if the correlation coefficient is low.
However, the combination of all these criteria should help the detection of
multicollinearity.
4.3.4.1 Test Based on Auxiliary Regressions:
Since multicollinearity arises because one or more of the regressors are exact or
approximately linear combinations of the other regressors, one may of finding out
which X variable is related to other X variables to regress each Xi on the
remaining X variables and compute the corresponding R2, which we designate as
Ri2 , each one of these regressions is called auxiliary to the main regression of Y on
the X’s. Then, following the relationship between F and R2 established in chapter
three under over all significance , the variable,
Ri =
R x21 , x2 , x3 ,... xk / k − 2
1 − R x21 , x2 , x3 ,... xk /( n − k + 1)
~ F( k − 2, n − k +1)
where: - n is number of observation
- k is number of parameters including the intercept
If the computed F exceeds the critical F at the chosen level of significance, it is
taken to mean that the particular Xi collinear with other X’s; if it does not exceed
the critical F, we say that it is not collinear with other X’s in which case we may
retain the variable in the model.
If Fi is statistically significant, we will have to decide whether the particular Xi
should be dropped from the model.
Note that according tot Klieri’s rule of thumb, which suggest that multicollinearity
may be a trouble some problem only if R2 obtained from an auxiliary regression is
greater than the overall R2, that is obtained from the regression of Y on all
regressors.
Econometrics: Module-II
Bedru B. and Seid H
4.3.4.2 The Farrar-Glauber test -
They use three statistics for testing
mutlicollinearity There are chi-square, F-ratio and t-ratio.
This test may be
outlined in three steps.
A. Computation of χ2 to test orthogonalitly: two variables are called orthogonal
if rx x = 0 i.e. if there is no any colinearity between them. In our discussion of in
i j
multiple regression models, we have seen the matrix representation of a three
explanatory variable model which is given by
Σx12
x' x = Σx 2 x1
Σx3 x1
Σx1 x3
Σx 2 x3
Σx32
Σx1 x 2
Σx
Σx3 x 2
2
2
Divide each elements of x’x by Σxi Σx j and compute the determinant
Σx12
(Σx 2 ) 2
1
Σ
x
2 x1
⇒
Σx 2 Σx 2
1
2
Σx3 x1
2
2
Σx1 Σx1
1
⇒ r12
r13
r12
1
r23
Σx1 Σx 2
Σx 22
(Σx 22 )
Σx3 x 2
2
2
Σx1 Σx1
Σx 2 x 3
Σx 22 Σx32
Σx32
(Σx32 ) 2
Σx1 x3
Σx1 x 2
2
Σx12 Σx32
r13
r23
1
The value of the determinant is equal to zero in the case of perfect
multicollinearity. (since r12 , r23 = 1)
On the other hand, it the case of orthogonality of the x’s, therefore rij = 0 and the
value of he determinant is unity. It follows, therefore, that if the value of this
determinant lies between zero and unity, there exist some degree of
mutlicollinearity. For detecting the degree of multicollinearity over the whole set
of explanatory variables, Glauber and Farrar suggests χ2 to test in the following
way.
Econometrics: Module-II
Bedru B. and Seid H
H 0 : x' s are orthogonal (i.e. rxi x j = 0)
H 1 : x' s are not orthogonal (i.e. rxi x j = 1)
Glauber and Farrar have found that the quantity
χ2 = -[ n –1 – 1/6(2k+5)] . log e {value
of the standardized determinant};
has a χ2
distribution with 1/2k(k-1) df. If the computed χ2 is greater than the critical value
of χ2, reject H0 in favour of multicollinearty. But if it is less, then accept H0.
B. Computation of t-ratio to test the pattern of multicollinearity
The t-test helps to detect those variables which are the cause of multicollinearity.
This test is performed based on the partial correlation coefficients through the
following procedure of hypothesis.
H 0 : rxi x j . x1 , x2 , x3 ,...xk = 0
H1 : rxi x j . x1 , x2 , x3 ,...xk ≠ 0
In the three variable model
rx21x2 . x3 =
(r12 − r13 r23 ) 2
(How?)
(1 − r232 )(1 − r232 )
2
2
x1 x3 . x3
r
(r − r r )
= 13 2 12 23 2
(1 − r23 )(1 − r12 )
rx22 x3 . x1 =
t* =
(r23 − r12 r13 ) 2
(1 − r132 )(1 − r122 )
(r 2 xi x j − x1 , x2 , x3 ,...xk ) n − k
(How?)
(1 − r 2 xi x j . x1 , x2 , x3 ,...xk )
if t*>t (tabulate), H0 is rejected
t*<t (tabulated), H0 is accepted, we accept Xi and Xj are not the cause of
muticollinearity since ( rx x is not significant)
i
j
Econometrics: Module-II
Bedru B. and Seid H
4.3.4.3 Test of multicollinearity using Eigen values and condition index:
Using Eigen values we can drive a number called condition number K as
follows: k =
max imum eigen value
Minimum eigen value
In addition using these value we can drive the condition index (CI) defined as
CI =
Decision rule:
Max.eigen value
= k
min . eigen value
if K is between 100 and 1000 there is moderate to strong
muticollinearity and if it exceeds 1000 there is sever muticollinearity.
Alternatively if CI( = k ) is between 10 and 30, there is moderate to strong
multicollineaity and if it exceeds 30 there is sever muticollinearity.
Example . If k=123,864 and CI=352 – This suggest existence of multicollinearity
4.3.4.4 Test of multicollinearity using Tolerance and variance inflation factor
σ2
ˆ
var(β 1 ) = 2
Σx1
1 σ2
= 2 VIF
2
1
−
Σx i
R
i
where Ri2 is the R 2 in the auxiliary regression of Xj on the remaining (k-2)
regressors and VIF is variance inflation factor.
Some authors therefore use the VIF as an indicator of multicollinearity: The
larger is the value of VIFj, the more “trouble some” or collinear is the variable Xj.
However, how high should VIF be before a regressor becomes troublesome? As a
rule of thumb, if VIF of a variable exceeds 10 (this will happens if Ri2 exceeds
(0.9) the variable is said to be highly collinear.
Other authors use the measure of tolerance to detect multicollinearity. It is defined
as
TOLi = (1 − R 2j ) =
1
VIF
Clearly, TOLj =1 if Xj is not correlated with the other regressors, where as it is
zero if it is perfectly related to other regressors.
Econometrics: Module-II
Bedru B. and Seid H
VIF (or tolerance) as a measure of collinearity, is not free of criticism. As we have
σ2
ˆ
seen earlier var(β ), = = 2 (VIF ) ; depends on three factors σ 2 , Σxi2 and VIF . A
Σx i
high VIF can be counter balanced by low σ 2 or high Σxi2 . To put differently, a
high VIF is neither necessary nor sufficient to get high variances and high
standard errors. Therefore, high multicollinearity, as measured by a high VIF may
not necessary cause high standard errors.
4.3.5.Remedial measures
It is more difficult to deal with models indicating the existence of multicollinearity
than detecting the problem of multicollinearity. Different remedial measures have
been suggested by econometricians; depending on the severity of the problem,
availability of other sources of data and the importance of the variables, which are
found to be multicollinear in the model.
Some suggest that minor degree of multicollinearity can be tolerated although one
should be a bit careful while interpreting the model under such conditions. Others
suggest removing the variables that show multicollinearity if it is not important in
the model. But, by doing so, the desired characteristics of the model may then get
affected. However, following corrective procedures have been suggested if the
problem of multicollinearity is found to be serious.
1. Increase the size of the sample: it is suggested that multicollinearity may be
avoided or reduced if the size of the sample is increased. With increase in the size
of the sample, the covariances are inversely related to the sample size. But we
should remember that this will be true when intercorrelation happens to exist only
in the sample but not in the population of the variables. If the variables are
collinear in the population, the procedure of increasing the size of the sample will
not help to reduce multicollinearity.
2. Introduce additional equation in the model: The problem of mutlicollinearity
may be overcome by expressing explicitly the relationship between multicollinear
Econometrics: Module-II
Bedru B. and Seid H
variables. Such relation in a form of an equation may then be added to the original
model. The addition of new equation transforms our single equation (original)
model to simultaneous equation model. The reduced form method (which is
usually applied for estimating simultaneous equation models) can then be applied
to avoid multicollinearity.
3. Use extraneous information – Extraneous information is the information
obtained from any other source outside the sample which is being used for the
estimation. Extraneous information may be available from economic theory or
from some empirical studies already conducted in the field in which we are
interested. Three methods, through which extraneous information is utilized in
order to deal with the problem of multicollinearity.
a. Method of using prior information: Suppose that the correct specification
of the model is Y = α + β 1 X 1 + β 2 X 2 + U i , and also X 1 and X 2 are found to
be collinear. If it is possible to gather information on the exact value of
β1 or β 2 from extraneous source, we then make use of such information in
estimating the influence of the remaining variable of the model in the
following way.
Suppose β 2* known a priori, then:
Y − β 2* X 2 = α + β 1 X 1 + U
Applying OLS method: βˆ1 =
Σx1 ( y − βˆ 2* x 2 ) Σx1 y − βˆ 2* Σx1 x 2
=
Σx12
Σx12
i.e. β̂1 is the OLS estimator of the slope of the regression of
(Y − β 2* X 2 ) on X 1 .
Thus, the estimating procedure described is equivalent to correcting the dependent
variable for the influence of those explanatory variables with known coefficients
(from extraneous source of information) and regressing this residual on the
remaining explanatory variables.
Econometrics: Module-II
Bedru B. and Seid H
b. Methods of transforming variables: This method is used when the
relationship between certain parameters is known as a priori. For instance,
suppose that we want to estimate the production function expressed in the
form Q = ALα K β e u where Q is quantity produced L-labor input and K- the
input of capital. It is required to estimate α and β .
On logarithmic
transformation, the function becomes:
ln Q = ln A + α ln L + β ln K + u i
Q* = A * +αL * + βK * +U
The asterisk indicates logs of the variables. Suppose, it is observed that K and L
move together so closely that it is difficult to separate the effect of changing
quantities of labor inputs on output from the effect of variation in the use of
capital. Again, let us assume that on the basis of information from some other
source, we have a solid evidence that the present industry is characterized by
constant returns to scale. This implies that α + β = 1 , we can therefore, on the basis
of this information, substitute β = (1 − α ) in the transformed function. On
combining the results, the relationship becomes:
Dˆ t = α + βˆPt + β 2*Yt + uˆ t
Where β̂1 is derived from the time series data, β̂ 2* is obtained by using the crosssection data.
By following the pooling technique, we have skirted the
multicollinearity between income and price.
The methods described above are no sure methods to get rid of the problem of
multicollinearity. Which of these rules work in practice will depend on the nature
of the data under investigation and severity of the multicollinearity problem.
Econometrics: Module-II
Bedru B. and Seid H
Chapter Five
Regression on Dummy Variables
5.1 The nature of dummy variables
In regression analysis the dependent variable is frequently influenced not only by
variables that can be readily quantified on some well-defined scale (e.g., income,
output, prices, costs, height, and temperature), but also by variables that are
essentially qualitative in nature (e.g., sex, race, color, religion, nationality, wars,
earthquakes, strikes, political upheavals, and changes in government economic
policy). For example, holding all other factors constant, female college professors
are found to earn less than their male counterparts, and nonwhites are found to
earn less than whites. This pattern may result from sex or racial discrimination, but
whatever the reason, qualitative variables such as sex and race do influence the
dependent variable and clearly should be included among the explanatory
variables. Since such qualitative variables usually indicate the presence or absence
of a “quality” or an attribute, such as male or female, black or white, or Christian
or Muslim, one method of “quantifying” such attributes is by constructing
artificial variables that take on values of 1 or 0, 0 indicating the absence of an
attribute and 1 indicating the presence (or possession) of that attribute.
For
example, 1 may indicate that a person is a male, and 0 may designate a female; or
1 may indicate that a person is a college graduate, and 0 that he is not, and so on.
Variables that assume such 0 and 1 values are called dummy variables.
Alternative names are indicator variables, binary variables, categorical variables,
and dichotomous variables.
Dummy variables can be used in regression models just as easily as quantitative
variables.
As a matter of fact, a regression model may contain explanatory
variables that are exclusively dummy, or qualitative, in nature.
Econometrics: Module-II
Bedru B. and Seid H
Example: Yi = α + β Di + u i ------------------------------------------(5.01)
where Y=annual salary of a college professor
Di = 1 if male college professor
= 0 otherwise (i.e., female professor)
Note that (5.01) is like the two variable regression models encountered previously
except that instead of a quantitative X variable we have a dummy variable D
(hereafter, we shall designate all dummy variables by the letter D).
Model (5.01) may enable us to find out whether sex makes any difference in a
college professor’s salary, assuming, of course, that all other variables such as age,
degree attained, and years of experience are held constant. Assuming that the
disturbance satisfy the usually assumptions of the classical linear regression
model, we obtain from (5.01).
Mean salary of female college professor: E (Yi / Di = 0) = α -------(5.02)
Mean salary of male college professor:
E (Yi / Di = 1) = α + β
that is, the intercept term α gives the mean salary of female college professors
and the slope coefficient β tells by how much the mean salary of a male college
professor differs from the mean salary of his female counterpart, α + β reflecting
the mean salary of the male college professor. A test of the null hypothesis that
there is no sex discrimination ( H 0 : β = 0) can be easily made by running
regression (5.01) in the usual manner and finding out whether on the basis of the t
test the estimated β is statistically significant.
5.2 Regression on one quantitative variable and one qualitative variable with
two classes, or categories
Consider the model: Yi = α i + α 2 Di + β X i + u i ----------------------------(5.03)
Econometrics: Module-II
Bedru B. and Seid H
Where: Yi = annual salary of a college professor
X i = years of teaching experience
Di = 1 if male
=0 otherwise
Model (5.03) contains one quantitative variable (years of teaching experience) and
one qualitative variable (sex) that has two classes (or levels, classifications, or
categories), namely, male and female. What is the meaning of this equation?
Assuming, as usual, that E (u i ) = 0, we see that
Mean salary of female college professor: E (Yi / X i , Di = 0) = α 1 + β X i ---------(5.04)
Mean salary of male college professor: E (Yi / X i , Di = 1) = (α + α 2 ) + β X i ------(5.05)
Geometrically, we have the situation shown in fig. 5.1 (for illustration, it is
assumed that α 1 > 0 ). In words, model 5.01 postulates that the male and female
college professors’ salary functions in relation to the years of teaching experience
have the same slope (β ) but different intercepts. In other words, it is assumed that
the level of the male professor’s mean salary is different from that of the female
professor’s mean salary (by α 2 ) but the rate of change in the mean annual salary
by years of experience is the same for both sexes.
Econometrics: Module-II
Bedru B. and Seid H
If the assumption of common slopes is valid, a test of the hypothesis that the two
regressions (5.04) and (5.05) have the same intercept (i.e., there is no sex
discrimination) can be made easily by running the regression (5.03) and noting the
statistical significance of the estimated α 2 on the basis of the traditional t test. If
the t test shows that α̂ 2 is statistically significant, we reject the null hypothesis that
the male and female college professors’ levels of mean annual salary are the same.
Before proceeding further, note the following features of the dummy variable
regression model considered previously.
1. To distinguish the two categories, male and female, we have introduced
only one dummy variable Di . For if Di = 1 always denotes a male, when
Di = 0 we know that it is a female since there are only two possible
outcomes.
Hence, one dummy variable suffices to distinguish two
categories. The general rule is this: If a qualitative variable has ‘m’
categories, introduce only ‘m-1’ dummy variables. In our example, sex
has two categories, and hence we introduced only a single dummy variable.
If this rule is not followed, we shall fall into what might be called the
dummy variable trap, that is, the situation of perfect multicollinearity.
2. The assignment of 1 and 0 values to two categories, such as male and
female, is arbitrary in the sense that in our example we could have assigned
D=1 for female and D=0 for male.
3. The group, category, or classification that is assigned the value of 0 is often
referred to as the base, benchmark, control, comparison, reference, or
omitted category. It is the base in the sense that comparisons are made
with that category.
Econometrics: Module-II
Bedru B. and Seid H
4. The coefficient α 2 attached to the dummy variable D can be called the
differential intercept coefficient because it tells by how much the value of
the intercept term of the category that receives the value of 1 differs from
the intercept coefficient of the base category.
5.3 Regression on one quantitative variable and one qualitative variable with
more than two classes
Suppose that, on the basis of the cross-sectional data, we want to regress the
annual expenditure on health care by an individual on the income and education of
the individual. Since the variable education is qualitative in nature, suppose we
consider three mutually exclusive levels of education: less than high school, high
school, and college. Now, unlike the previous case, we have more than two
categories of the qualitative variable education. Therefore, following the rule that
the number of dummies be one less than the number of categories of the variable,
we should introduce two dummies to take care of the three levels of education.
Assuming that the three educational groups have a common slope but different
intercepts in the regression of annual expenditure on health care on annual income,
we can use the following model:
Yi = α 1 + α 2 D2i + α 3 D3i + βX i + u i --------------------------(5.06)
Where Yi =
annual expenditure on health care
X i = annual expenditure
D2 = 1 if high school education
= 0 otherwise
D3 = 1 if college education
= 0 otherwise
Note that in the preceding assignment of the dummy variables we are arbitrarily
treating the “less than high school education” category as the base category.
Therefore, the intercept α 1 will reflect the intercept for this category.
Econometrics: Module-II
The
Bedru B. and Seid H
differential intercepts α 2 and α 3 tell by how much the intercepts of the other two
categories differ from the intercept of the base category, which can be readily
checked as follows: Assuming E (u i ) = 0 , we obtain from (5.06)
E (Yi | D2 = 0, D3 = 0, X i ) = α 1 + β X i
E (Yi | D2 = 1, D3 = 0, X i ) = (α 1 + α 2 ) + β X i
E (Yi | D2 = 0, D3 = 1, X i ) = (α 1 + α 3 ) + β X i
which are, respectively the mean health care expenditure functions for the three
levels of education, namely, less than high school, high school, and college.
Geometrically, the situation is shown in fig 5.2 (for illustrative purposes it is
assumed that α 3 > α 2 ).
5.4 Regression on one quantitative variable and two qualitative variables
The technique of dummy variable can be easily extended to handle more than one
qualitative variable. Let us revert to the college professors’ salary regression
(5.03), but now assume that in addition to years of teaching experience and sex the
skin color of the teacher is also an important determinant of salary. For simplicity,
assume that color has two categories: black and white. We can now write (5.03)
as :
Yi = α 1 + α 2 D2i + α 3 D3i + βX i + u i -------------------------------------------(5.07)
Econometrics: Module-II
Bedru B. and Seid H
Where Yi = annual salary
X i = years of teaching experience
D2 = 1 if female
=0 otherwise
D3 = 1 if white
=0 otherwise
Notice that each of the two qualitative variables, sex and color, has two categories
and hence needs one dummy variable for each. Note also that the omitted, or base,
category now is “black female professor.”
Assuming E (u i ) = 0 , we can obtain the following regression from (5.07)
Mean salary for black female professor:
E (Yi | D2 = 0, D3 = 0, X i ) = α 1 + β X i
Mean salary for black male professor:
E (Yi | D2 = 1, D3 = 0, X i ) = (α 1 + α 2 ) + β X i
Mean salary for white female professor:
E (Yi | D2 = 0, D3 = 1, X i ) = (α 1 + α 3 ) + β X i
Mean salary for white male professor:
E (Yi | D2 = 1, D3 = 1, X i ) = (α 1 + α 2 + α 3 ) + β X i
Once again, it is assumed that the preceding regressions differ only in the intercept
coefficient but not in the slope coefficient β .
An OLS estimation of (5.06) will enable us to test a variety of hypotheses. Thus,
if α 3 is statistically significant, it will mean that color does affect a professor’s
salary. Similarly, if α 2 is statistically significant, it will mean that sex also affects
a professor’s salary.
If both these differential intercepts are statistically
significant, it would mean sex as well as color is an important determinant of
professors’ salaries.
Econometrics: Module-II
Bedru B. and Seid H
From the preceding discussion it follows that we can extend our model to include
more than one quantitative variable and more than two qualitative variables. The
only precaution to be taken is that the number of dummies for each qualitative
variable should be one less than the number of categories of that variable.
5.5 Testing for structural stability of regression models
Until now, in the models considered in this chapter we assumed that the qualitative
variables affect the intercept but not the slope coefficient of the various subgroup
regressions. But what if the slopes are also different? If the slopes are in fact
different, testing for differences in the intercepts may be of little practical
significance. Therefore, we need to develop a general methodology to find out
whether two (or more) regressions are different, where the difference may be in
the intercepts or the slopes or both.
5.6 Interaction effects
Consider the following model:
Yi = α 1 + α 2 D2i + α 3 D3i + βX i + u i ---------------------------------(5.08)
where Yi = annual expenditure on clothing
X i = income
D2 = 1 if female
= 0 if male
D3 = 1 if college graduate
= 0 otherwise
Implicit in this model is the assumption that the differential effect of the sex
dummy D2 is constant across the two levels of education and the differential
effect of the education dummy D3 is also constant across the two sexes. That is, if,
say, the mean expenditure on clothing is higher for females than males this is so
whether they are college graduates or not. Likewise, if, say, college graduates on
Econometrics: Module-II
Bedru B. and Seid H
the average spend more on clothing than non college graduates, this is so whether
they are female or males.
In many applications such an assumption may be untenable. A female college
graduate may spend more on clothing than a male graduate. In other words, there
may be interaction between the two qualitative variables D2 and D3 and therefore
their effect on mean Y may not be simply additive as in (5.08) but multiplicative
as well, as in the following model:
Yi = α 1 + α 2 D2i + α 3 D3i + α 4 ( D2i D3i ) + β X i + u i -----------------(4.09)
From (4.09) we obtain
E (Yi | D2 = 1, D3 = 1, X i ) = (α 1 + α 2 + α 3 + α 4 ) + β X i ------------(4.10)
which is the mean clothing expenditure of graduate females. Notice that
α 2 = differential effect of being a female
α 3 = differential effect of being a college graduate
α 4 = differential effect of being a female graduate
which shows that the mean clothing expenditure of graduate females is different
(by α 4 ) from the mean clothing expenditure of females or college graduates. If
α 2 , α 3 , and α 4 are all positive, the average clothing expenditure of females is
higher (than the base category, which here is male nongraduate), but it is much
more so if the females also happen to be graduates.
Similarly, the average
expenditure on clothing by a college graduate tends to be higher than the base
category but much more so if the graduate happens to be a female. This shows
how the interaction dummy modifies the effect of the two attributes considered
individually. Whether the coefficient of the interaction dummy is statistically
significant can be tested by the usual t test. If it turns out to be significant, the
simultaneous presence of the two attributes will attenuate or reinforce the
individual effects of these attributes.
Needless to say, omitting a significant
interaction term incorrectly will lead to a specification bias.
Econometrics: Module-II
Bedru B. and Seid H
5.7 The use of dummy variables in seasonal analysis
Many economic time series based on monthly or quarterly data exhibit seasonal
patterns (regular oscillatory movement). Examples are sales of department stores
at Christmastime, demand for money (cash balances) by households at holiday
times, demand for ice cream and soft drinks during the summer, and prices of
crops right after the harvesting season. Often it is desirable to remove the seasonal
factor, or component, from a time series so that one may concentrate on the other
components, such as the trend. The process of removing the seasonal component
from a time series is known as deseasonalization, or seasonal adjustment, and the
time series thus obtained is called the deseasonalized or seasonally adjusted, time
series. Important economic time series, such as the consumer price index, the
wholesale price index, the index of industrial production, are usually published in
the seasonably adjusted form.
5. 8 Piecewise linear regression
To illustrate yet another use of dummy variables, consider fig 5.3, which shows
how a hypothetical company remunerates its sales representatives.
Econometrics: Module-II
Bedru B. and Seid H
It pays commissions based on sales in such manner that up to a certain level, the
target, or threshold, level X*, there is one (stochastic) commission structure and
beyond that level another.
(Note:
Besides sales, other factors affect sales
commission. Assume that these other factors are represented by the stochastic
disturbance term.) More specifically, it is assumed that sales commission increases
linearly with sales until the threshold level X*, after which also it increases
linearly with sales but at a much steeper rate. Thus, we have a piece-wise linear
regression consisting of two linear pieces or segments, which are labeled I and II
in fig. 5.3, and the commission function changes its slope at the threshold value.
Given the data on commission, sales, and the value of the threshold level X*, the
technique of dummy variables can be used to estimate the (differing) slopes of the
two segments of the piecewise linear regression shown in fig. 5.3. We proceed as
follows:
Yi = α 1 + β X + β 2 ( X i − X *) Di + u i ------------------------------------(5.11)
where Yi = sales commission
X i = volume of sales generated by the sales person
X*= threshold value of sales also known as a knot (Known in advance)
D=1 if X i > X *
= 0 if X i < X *
Assuming E (u i ) = 0, we see at once that
E (Yi | Di = 0, X i , X *) = α 1 + β 1 X i ---------------------------------------(5.12)
which gives the mean sales commission up to the target level X* and
E (Yi | Di = 1, X i , X *) = α 1 − β 2 X * + ( β 1 + β 2 ) X i ----------------------(5.13)
which gives the mean sales commission beyond the target level X*.
Thus, β1 gives the slope of the regression lien in segment I, and β1 + β 2 gives the
slope of the regression line in segment II of the piecewise linear regression shown
Econometrics: Module-II
Bedru B. and Seid H
in fig 5.3. A test of the hypothesis that there is no break in the regression at the
threshold value X* can be conducted easily by noting the statistical significance of
the estimated differential slope coefficient β̂ 2 .
Summary:
1. Dummy variables taking values of 1 and 0 (r their linear transforms) are a
means of introducing qualitative regressors in regression analysis.
2. Dummy variables are a data-classifying device in that they divide a sample
into various subgroups based on qualities or attributes (sex, marital status,
race, religion, etc.) and implicitly allow one to run individual regressions
for each subgroup. If there are differences in the response of the regress
and to the variation in the quantitative variables in the various subgroups,
they will be reflected in the differences in the intercepts or slope
coefficients, or both, of the various subgroup regressions.
3. Although a versatile took, the dummy variable technique needs to be
handled carefully. First, if the regression contains a constant term, the
number of dummy variables must be less than the number of classifications
of each qualitative variable. Second, the coefficient attached to the dummy
variables must always be interpreted in relation to the base, or reference,
group, that is, the group that gets the value of zero. Finally, if a model has
several qualitative variables with several classes, introduction of dummy
variables can consume a large number of degrees of freedom. Therefore,
one should always weigh the number of dummy variables to be introduced
against the total number of observations available for analysis.
4. Among its various applications, this chapter considered but a few. These
included (1) comparing two (or more) regressions, (2) deseasonalizing time
series data, (3) combining time series and cross-sectional data, and(4)
piecewise linear regression models.
Econometrics: Module-II
Bedru B. and Seid H
5. Since the dummy variables are non stochastic, they pose no special
problems in the application of OLS. However, care must be exercised in
transforming data involving dummy variables. In particular, the problems
of autocorrelation and heteroscedasticity need to be handled very carefully.
Test your-self question
In studying the effect of a number of qualitative attributes on the prices
charged for movie admissions in a large metropolitan area for the period 19611964, R. D.Lampson obtained the following regression for the year 1961:
Yˆ = 4.13 + 5.77 D1 + 8.12 D2 − 7.68 D3 − 1.13D4 + 27.09 D5 + 31.46 log X 1 + 0.81X 2 + 3other dummy var iables
(2.04)
(2.67)
(2.51)
(1.78)
(3.58)
(13.78)
(0.17)
R 2 = 0.961
where : D1 = theater location: 1 if suburban, 0 if city center
D2 = theater age: 1 if less than 10 years since construction or major
renovation, 0 otherwise.
D3 = type of theater: 1 if outdoor, 0 if indoor
D4 = parking: 1 if provided, 0 otherwise
D5 = Screening policy: 1 if first run, 0 otherwise
X 1 = average percentage unused seating capacity per showing
X 2 = Average film rental, cents per ticket charged by the distributor
Y = adult evening admission price, cents
and where the figures in parentheses are standard errors.
a. Comment on the results.
b. How would you rationalize the introduction of the variable X 1 ?
c. How would you explain the negative value of the coefficient of D4 ?
Econometrics: Module-II
Bedru B. and Seid H
Chapter Six
Dynamic econometric models
6.1 Introduction
While considering the standard regression model, we did not pay attention to the
timing of the explanatory variable(s) on the dependent variable. The standard
linear regression implies that change in one of the explanatory variables causes a
change in the dependent variable during the same time period and during that
period alone. But in economics, such specification is scarcely found. In economic
phenomenon, generally, a cause often produces its effect only after a lapse of time;
this lapse of time (between cause and its effect) is called a lag. Therefore, realistic
formulations of economic relations often require the insertion of lapped values of
the explanatory or insertion of lagged dependent variables.
6.2 Autoregressive and distributed lag models
In regression analysis involving time series data, if the regression model includes
not only the current but also the lagged (past) values of the explanatory variables
(the X’s), it is called distributed large models. For example:
C t = α + β 0Yt + β 1Yt − 2 + β 2Yt − 2 + U t
is a distributed lag model of consumption function. This means that the value of
the consumption expenditure (C t ) at any given time depends on the current and
past values of the disposable income (Yt ) . The general form of a distributed lag
model (with only lagged exogenous variables) is written as:
Yt = α + β 0 X t + β 1 X t −1 + β 2 xt − 2 + − − − − + β s X t − s + − − +U t
The number of lags, s, may be either finite or infinite. But generally it is assumed
to be finite. The coefficient β 0 is known as the short run, or impact, multiplier
because it gives the change in mean value of Y following a unit change in X in the
Econometrics: Module-II
Bedru B. and Seid H
same time period t. If the change in X is maintained at the same level thereafter,
then,(β0+β1)gives the change in the (mean value of) Y in the next period,(β0+β1+
β2) in the following period, and so on. These partial sums are called interim, or
intermediate, multipliers. Finally, after ‘s’ periods we obtain which is known as
the long run, distributed-lag multiplier provided the sum β exists.
s
∑β
i
= β 0 + β1 + β 2 + − − − − − − + β s = β
i =0
It should be noted that distributed lag model is not to be confused with
autoregressive model.
If the regression model includes lagged values of the
explanatory variables it is called distributed lag model where as of the model
includes one or more lagged values of the dependent variable among its
explanatory
variables,
Yt = α + β X t + βX t −1 + U t
it
is
called
represents
an
autoregressive
distributed-lag
model.
model
Thus,
whereas
Yt = α + β X t + γYt −1 + Wt is an example of an autoregressive model.
The Reasons for Lags:
There are three major reasons why lags may occur.
1. Psychological reasons: As a result of the force of habit (inertia), people,
for example, do not change their consumption habits immediately following
a price decrease or an income increase perhaps because the process of
change may involve some immediate disutility. Thus, those who become
instant milliners by winning lotteries may not change the lifestyle to which
they were accustomed for a long time because they may not know how to
react to such windfall gain immediately. Of course, given reasonable time,
they may learn to live with their newly acquired fortune. Also, people may
not know whether a change is “permanent” or ‘transitory”.
Thus, my
reaction to an increase in my income will depend in whether or not the
increase in permanent.
If it is only a nonrecurring increase and in
Econometrics: Module-II
Bedru B. and Seid H
succeeding periods my income returns to its previous level, I may save the
entire increase, whereas someone else in my position might decide to “live
it up”.
2. Technological reason: suppose, for instance, the price of capital relative
to labor declines making substitution of capital for labor economically
feasible. Of course, addition of capital takes time (gestation period)
moreover, if the drop in price is expected to be temporarily, firms may not
rush to substitute capital for labor, especially if they expect that after
temporarily drop the price of capital may increase beyond its previous
level.
3. Institutional reasons: These reasons also contribute to lags. For example,
contractual obligations may prevent firms from switching from one source
of labor or raw material to another. As another example, those who have
placed funds in long term saving accounts for fixed durations such as one
year, three years or seven years are essentially “locked” in even though
money market conditions may be such that higher yields are available.
6.3 Estimation of distributed lag models
Suppose we have the following distributed lag model in one explanatory variable.
Yt = α + β 0 X t + β1 X t − 2 + β 2 xt − 2 + − − − − + β s X t − s + − − +U t ------------(6.01)
In (6.01) the length of the lag, that is, how far back into the past we want to go
hasn’t been defined. Such a model is called an infinite (lag) model, whereas
models with specified lags are called a finite (lag) distributed-lag model.
How do we estimate α and β in (6.01)? We may adopt two approaches:
I. Ad Hoc estimation of distributed-lag models
II. A priori restriction on β ' s by assuming that the β ' s follow some
systematic pattern.
Econometrics: Module-II
Bedru B. and Seid H
I.
Ad Hoc estimation of distributed lag models
Since the explanatory variable X t is assumed to be non-stochastic (or at least
uncorrelated with the disturbance term Ut), X t −1 , X t − z − − and so on, are nonstochastic too. Therefore in principle, OLS can be applied to the above model
(6.01). The Ad Hoc approach is undertaken as follows.
First, regress Y on X t , then Yt on X t , X − 1 , then Yt on X t , and X t − 2 , this procedure
will continue until the regression coefficients of the lagged variables start
becoming statistically insignificant and/or the coefficient of at least one of the
variables changes signs from positive to negative vise versa. Consider the
following hypothetical example.
Yˆt = 8.37 + 0.17 X t
Yˆt = 8.27 + 0.111X t + 0.06 X t −1
Yˆt = 8.27 + 0.109 X t + 0.071X t −1 − 0.055 X t − 2
Yˆt = 8.32 + 0.108 X t + 0.063 X t −1 + 0.022 X t − 2 − 0.020 X t −3
Proponents of this approach chose the second regression as the “best” one because
in the last two equation the sign of X t − z was not stable and in the last equation the
sign of X t −3 was negative, which may be difficult to interpret economically.
Although seemingly straight forward, ad hoc estimation suffers from many
drawbacks, such as the following:
a. There is no guide as to what is the maximum lag length
b. As one estimates successive lags, there are fewer degrees of freedom
left, making statistical inference some what shaky
c. More importantly, in economic time series data, successive values
(lags) tend to be highly correlated; hence multicollinearity rears its
ugly head.
d. The sequential search for the lengths of lags opens the researcher to
the charge of data mining.
Econometrics: Module-II
Bedru B. and Seid H
In view of the preceding problems, the ad hoc estimation procedure has very little
to recommend it. Some prior or theoretical considerations are brought to bear upon
the variousβ’s if we are to make headway with the estimation problem.
Methods based on A priori restriction on β ' s
II.
II.1 The koyck approach to distributed lag models
In order to reduce the number of lags in the given distributed lag model, the
present model makes an assumption that the impact of explanatory variables (on
the dependent variable) it the most distant past is less than what is in most recent
periods. More specifically, the Koyck lag formulation assumes that the weights
(impacts) are declining continuously.
Assume the original model is:
Y = α 0 + β 0 X t + β 1 X t −1 + β 2 xt − 2 + − − − − + β s X t − s + − − +U t
U ~ N(0, σ 2 )
Ε(u i u j ) = 0
Ε(u i xi ) = 0
According to Koyck:
β i = λi β 0
⇒ β1 = λβ 0 ,
β 2 = λ2 β 0
λ is known as the rate of decline or decay, of the distributed lag and 1- λ is known
as the speed of adjustment. But assuming non-negative values for λ , koyck rules
out the β ’s from changing sign, and by assuming λ <1, lesser weight is assigned to
the decline β ’s than current one. Also, the long run multiplier is a finite amount in
Koyck scheme.
∞
∑β
i =0
i
1
= β0
1− λ
Substituting the values of β ’s in the original model we obtain:
Econometrics: Module-II
Bedru B. and Seid H
Y = α 0 + β 0 X t + (λβ 0 ) X t −1 + (λ2 β 0 ) xt − 2 + − − − − − + U t
Lagging by one period and multiply by λ we get:
λYt −1 = λα 0 + (λβ 0 ) X t −1 + (λ2 β 0 ) xt −2 + (λ3 β 0 ) xt −3 + − − − − − + λU t −1
Substituting λYt −1 from Yt we obtain
Yt − λYt −1 = α (1 − λ ) + β 0 X t + (U t − λU t −1 )
Let α * = α (1 − λ ),Vt = U t − λU t −1
Yt = α * + β 0 X t + λYt −1 + Vt
The above procedure of transformation is known as koyck transformation. If the
koyck hypothesis concerning the lag scheme and assumptions concerning Vt are
accepted, ordinary least square can be applied to obtain estimators of α , β 0 and λ .
From
these
estimates,
the
estimates
of
the
original
parameters
α 0 , β 1 , β 2 ,− − − β k can be easily obtained through:
αˆ =
α*
,
1− λ
β i = λi β 0
However, the following features of the koyck transformation may be taken note
of:
a. Our original model was a distributed lag model but he transformed model is
autoregressive model because Yt −1 appears as one of the explanatory
variables.
Koyck transformation, therefore, also helps to convert
distributed lag model into an auto regressive model.
b. In the new formulation the error term Vt = U t − λU t −1 is found to be auto
correlated despite the fact that the disturbance term of the original model is
non-auto correlated. It can be seen as under
Ε(VtVt −1 ) = Ε(U t − λU t −1 )(U t −1 − λU t −2 )
= Ε(U tU t −1 − U t λU t − 2 − λU 2 t −1 − λ2U t −1U t − 2 )
= −λΕ(U 2 t −1 )
= −λσ u2 ≠ 0
Econometrics: Module-II
Bedru B. and Seid H
c. The lagged variable Yt −1 is not also independent of the error term Vt i.e.
Ε(U t Yt −1 ) ≠ 0 this is because Yt is directly dependent on Vt . Similarly Yt −1 on
Vt −1 . But since Vt and Vt −1 are not independent, Yt −1 will obviously be related
to Vt .
Due to these two problems, the Koyck transformation of the distributed lag model
will give rise to biased and inconsistent estimates. In addition to these estimation
problem, the Koyck hypothesis is quite restrictive in the sense that it assumes that
impact of past periods decline successively in a specific way. But the following
are also possible.
⇒
1. β 0 > β 1 > β 2 > β 3 − − − −
2. β 0 = β 1 = β 2 = β 3 − − − −
3. β 0 < β 1 < β 2 < β 3 − − − −
II.2 Rationalization of the Koyck Model: Adaptive Expectations (AE) Model
The Koyck model is ad hoc since it was obtained by a purely algebraic process; it
is devoid of any theoretical underpinning. But this gap can be filled if we start
from a different perspective. Suppose we postulate the following model:
Yt = β 0 + β 1 X t* + u t -----------------------------------------------------(i)
where: Y=demand for money (real cash balances)
X*= equilibrium, optimum, expected long-run or normal rate of interest
u= error term
Equation (i) postulates that the demand for money is a function of expected (in the
sense of anticipation) rate of interest. Since the expectational variable X* is not
directly observable, let’s propose the following hypothesis about how expectations
are formed:
X * − X t*−1 = γ ( X t − X t*−1 ) ---------------------------------------------(ii) where γ ,
such that 0< γ ≤ 1, is known as the coefficient of expectation. The hypothesis is
Econometrics: Module-II
Bedru B. and Seid H
known as the adaptive expectation, progressive expectation, or error learning
hypothesis, popularized by Cagan and Friedman.
What equation (ii) implies is that “economic agents will adapt their expectations
in the light of past experience and that in particular they will learn from their
mistakes.” More specifically, (ii) states that expectations are revised each period
by a fraction γ of the gap between the current value of the variable and its
previous expected value. Thus, for our model this would mean that expectations
about interest rates are revised each period by a fraction γ of the discrepancy
between the rate of interest observed in the current period and what its anticipated
value had been in the previous period. Another way of stating this would be to
write (ii) as: X t* = γX t + (1 − γ ) X t*−1 -------------------------------------------------(iii)
which shows that the expected value of the rate of interest at time t is a weighted
average of the actual value of the interest rate at time ‘t’ and its value expected in
the previous period, with weights of ‘ γ ’ and ‘1- γ ’, respectively.
If γ =1,
X t* = X t , meaning that expectations are realized immediately and fully, that is, in
the same time period. If, on the other hand, γ =0, X t* = X t*−1 , meaning that
expectations are static, that is, “conditions prevailing today will be maintained in
all subsequent periods.
Expected future values then become identified with
current values.” Substituting (iii) into (i), we obtain
[
]
Yt = β 0 + β 1 γX t + (1 − γ ) X t*−1 + u t
= β 0 + β1γX t + β 1 (1 − γ ) X t*−1 + u t ---------------------------(iv)
Now, lag equation (i) by one period, multiply it by 1- γ , and subtract the product
from (iv). After simple algebraic manipulations, we obtain:
Yt = γβ 0 + γβ1 X t + (1 − γ )Yt −1 + u t − (1 − γ )u t −1
= γβ 0 + γβ1 X t + (1 − γ )Yt −1 + vt -----------------------------(v)
where vt = u t − (1 − γ )u t −1 .
Econometrics: Module-II
Bedru B. and Seid H
Let us note the difference between (i) and (v). In the former, β1 measures the
average response of Y to a unit change in X*, the equilibrium or long-run value of
X. In (v), on the other hand, γβ1 measures the average response of Y to a unit
change in the actual or observed value of X. These responses will not be the same
unless, of course, γ =1, that is, the current and long-run values of X are the same.
In practice, we first estimate (v). Once an estimate of γ is obtained from the
coefficient of lagged Y, we can easily compute β1 by simply dividing the
coefficient of X t (= γβ 1 ) by γ .
Note that like the Koyck model, the adaptive expectations model is autoregressive
and its error term is similar to the Koyck error term.
II. 3 Another Rationalization of the Koyck model: the stock adjustment, or
partial adjustment model
The adaptive expectation model is one way of rationalizing the Koyck model.
Another rationalization is provided by Marc Nerlove in the so-called stock
adjustment or partial adjustment model. To illustrate this model, consider the
flexible accelerator model of economic theory, which assumes that there is
equilibrium, optimal, desired, or long-run amount of capital stock needed to
produce a given output under the given state of technology, rate of interest, etc.
For simplicity assume that this desired level of capital Yt* is a linear function of
output X as follows:
Yt* = β 0 + β 1 X t + u t ------------------------------------------------(1)
Since the desired level of capital is not directly observable, Nerlove postulates the
following hypothesis, known as the partial adjustment, or stock adjustment,
hypothesis:
Yt − Yt −1 = δ (Yt* − Yt −1 ) --------------------------------------------(2)
Econometrics: Module-II
Bedru B. and Seid H
where δ , such that 0 < δ ≤ 1 , is known as the coefficient of adjustment and where
Yt − Yt −1 = actual change and (Yt* − Yt −1 ) =desired change.
Since Yt − Yt −1 , the change in capital stock between two periods, it is nothing but
investment, (2) can alternatively be written as:
I t = δ (Yt* − Yt −1 ) ----------------------------------------------------------------(3)
where I t = Investment in time period t.
Equation (2) postulates that the actual change in capital stock (investment) in any
given time period t is some fraction δ of the desired change for that period. If
δ =1, it means that the actual stock of capital is equal to the desired stock; that is,
actual stock adjusts to the desired stock instantaneously (in the same period).
However, if δ =0, it means that nothing changes since actual stock at time t is the
same as that observed in the previous time period. Typically, δ is expected to lie
between these extremes since adjustment to the desired stock of capital is likely to
be incomplete because of rigidity, inertia, contractual obligations, etc. – hence the
name partial adjustment model. Note that the adjustment mechanism (2)
alternatively can be written as:
Yt = δYt * + (1 − δ )Yt −1 -------------------------------------------------(4)
showing that the observed capital stock at time t is a weighted average of the
desired capital stock at that time and the capital stock existing in the previous
time period, δ and (1- δ ) being the weights. Now substitution of (1) into (4)
gives:
Yt = δ ( β 0 + β 1 X t + u t ) + (1 − δ )Yt −1
= δβ 0 + δβ 1 X t + (1 − δ )Yt −1 + δu t ----------------------------------(5)
This model is called the partial adjustment model.
Since (1) represents the long-run, or equilibrium, demand for capital stock, (5) can
be called the short-run demand function for capital stock since in the short run the
existing capital stock may not necessarily be equal to its long-run level. Once we
Econometrics: Module-II
Bedru B. and Seid H
estimate the short-run function (5) and obtain the estimate of the adjustment
coefficient δ
(from the coefficient of Yt −1 ), we can easily derive the long-run
function by simply dividing δβ 0 and δβ 1 by δ and omitting the lagged Y term,
which will then give (1).
The partial adjustment model resembles both the Koyck and adaptive expectation
models in that it is autoregressive. But it has a much simpler disturbance term: the
original disturbance term u t multiplied by a constant δ . But bear in mind that
although similar in appearance, the adaptive expectation and partial adjustment
models are conceptually very different. The former is based on uncertainty (about
the future course of prices, interest rates, etc.), whereas the latter is due to
technical or institutional rigidities, inertia, cost of change, etc. However, both of
these models are theoretically much sounder than the Koyck model.
The important point to keep in mind is that since Koyck, adaptive expectations,
and stock adjustment models – apart from the difference in the appearance of the
error term – yield the same final estimating model, one must be extremely careful
in telling the reader which model the researcher is using and why. Thus,
researchers must specify the theoretical underpinning of their model.
II. 4 Combination of adaptive expectations and partial adjustment models
Consider the following model:
Yt* = β 0 + β1 X t* + u t ------------------------------------------------------ (a)
where Yt* = desired stock of capital and X t* = expected level of output.
Since both Yt* and X t* are not directly observable, one could use the partial
adjustment mechanism for Yt* and the adaptive expectations model for X t* to
arrive at the following estimating equation.
Econometrics: Module-II
Bedru B. and Seid H
Yt = β 0δγ + β 1δγX t + [(1 − γ ) + (1 − δ )]Yt −1 − (1 − δ )(1 − γ )Yt − 2 + [δu t − δ (1 − γ )u t −1 ]
= α 0 + α 1 X t + α 2Yt −1 + α 3Yt − 2 + vt ---------------------------------------------(b)
where vt = δ [u t − (1 − γ )u t −1 ] . This model too is autoregressive, the only difference
from the purely adaptive expectations model being that Yt −2 appears along with
Yt −1 as an explanatory variable. Like Koyck and the AE models, the error term in
(b) follows a moving average process. Another feature of this model is linear in
the α ’s, it is nonlinear in the original parameters.
A celebrated application of (a) has been Friedman’s permanent income hypothesis,
which states that “permanent” or long-run consumption is a function of
“permanent” or long-run income.
The estimation of (b) presents the same estimation problems as the Koyck’s or the
AE model in that all these models are autoregressive with similar error structures.
II.4 The Almon approach to distributed lag models
The Almon lag model possesses two advantages over the Koyck procedure. First,
it does not violate any of the ordinary least square basic assumptions concerning
the disturbance term. Second it is far more flexible than Koyck method in terms
of the form of lag scheme. It is because; this method does not hypothesize any
form of lag before hand.
This model assumes that any pattern of lag scheme among β ' s can be described by
polynomial.
This idea is based on a theorem in mathematics known as
Weierstrass’s theorem, which states that under general conditions a curve may be
approximated by a polynomial whose degree is one more than the number of
turning points in the curve. Suppose that the β ' s in a given distributed lag model
are expected to decrease first, then increase and again decrease
Econometrics: Module-II
Bedru B. and Seid H
Suppose our original model to be estimated is:
Y = α 0 + β 0 X t + β 1 X t −1 + β 2 xt − 2 + − − − − + β s X t − s + − − +U t ,
assuming the above
polynomial:
β i = a0 + a1i + a 2 i 2 + a3i 3 where a0 , a1 , a 2 , and a3 are parameters to be estimated.
We are, now in a position to obtain all β ' s by setting i equal to the value of the
subscript of the particular coefficient.
β 0 = a0
β 1 = a 0 + a1 + a 2 + a 3
β 2 = a0 + 2a1 + 4a 2 + 8a3
β 3 = a 0 + 3a1 + 9a 2 + 27 a3
β k = a0 + ka1 + k 2 a 2 + k 3 a3
Naturally therefore, what is needed to be estimated is only four parameters of the
polynomial
function:
β i = a0 + a1i + a 2 i 2 + a3i 3 .
Obtaining
the
values
of
a 0 , a1 , a 2 , and a 3 , we are able to estimate all the parameters of the original
distributed lag model. Substituting values of β ' s in the original model,
Yt = α 0 + α 0 X t + (a 0 + a1 + a 2 + a 3 ) X t −1 + (a 0 + 2a1 + 4a 2 + 8a3 ) xt − 2 + − − − − +U t
k
k
k
k
Yt = α 0 + a 0 ∑ X t −i + a1 ∑ iX t −i + a 2 ∑ i 2 X t −i + a 3 ∑ i 3 X t −i + U i
i =1
i =1
i =1
i =1
Yt = α 0 + a 0 w0 + a1 w1 + a 2 w2 + a 3 w3 + U t
k
k
i =1
i =1
where: w0 = ∑ X t −i , w2 = ∑ iX t −i -----------------------------------------------(c)
This is the final form (or transformed form) of Almon Lag model. We can now
apply OLS method to estimate αˆ 0 , aˆ 0 , aˆ1 , aˆ 2 , and aˆ 3 to obtain β ' s in the original
form. Note that vt remains in its original form.
Econometrics: Module-II
Bedru B. and Seid H
Chapter Seven
An Introduction to Simultaneous Equation models
7.1 Introduction
In all the previous chapters discussed so far, we have been focusing exclusively
with the problems and estimations of a single equation regression models. In such
models, a dependent variable is expressed as a linear function of one or more
explanatory variables. The cause-and-effect relationship in such models between
the dependent and independent variable is unidirectional. That is, the explanatory
variables are the cause and the independent variable is the effect. But there are
situations where such one-way or unidirectional causation in the function is not
meaningful.
This occurs if, for instance, Y (dependent variable) is not only
function of X’s (explanatory variables) but also all or some of the X’s are, in turn,
determined by Y. There is, therefore, a two-way flow of influence between Y and
(some of) the X’s which in turn makes the distinction between dependent and
independent variables a little doubtful. Under such circumstances, we need to
consider more than one regression equations; one for each interdependent
variables to understand the multi-flow of influence among the variables. This is
precisely what is done in simultaneous equation models.
A system describing the joint dependence of variables is called a system of
simultaneous equation or simultaneous equations model.
The number of
equations in such models is equal to the number of jointly dependent or
endogenous variables involved in the phenomenon under analysis. Unlike the
single equation models, in simultaneous equation models it is not usually possible
(possible only under specific assumptions) to estimate a single equation of the
model without taking into account the information provided by other equation of
the system. If one applies OLS to estimate the parameters of each equation
Econometrics: Module-II
Bedru B. and Seid H
disregarding other equations of the model, the estimates so obtained are not only
biased but also inconsistent; i.e. even if the sample size increases indefinitely, the
estimators do not converge to their true values.
The bias arising from application of such procedure of estimation which treats
each equation of the simultaneous equations model as though it were a single
model is known as simultaneity bias or simultaneous equation bias. To avoid this
bias we will use other methods of estimation, such as, Indirect Least Square (ILS),
Two Stage Least Square (2SLS), three Stage Least Square(3SLS), Maximum
Likelihood Methods and the Method of Instrumental Variable (IV).
What happens to the parameters of the relationship if we estimate by applying
OLS to each equation without taking into account the information provided by the
other equations in the system? The application of OLS to estimate the parameters
of economic relationships presupposes the classical assumptions discussed in
chapter one of this course. One of the crucial assumptions of the OLS is that the
explanatory variables and the disturbance term is independent i.e. the disturbance
term is truly exogenous. Symbolically: E[XiUi] = 0. As a result, the linear model
could be interpreted as describing the conditional expectation of the dependent
variable (Y) given a set of explanatory variables. In the simultaneous equation
models, such independence of explanatory variables and disturbance term is
violated i.e. E[XiUi] ≠ 0. If this assumption is violated, the OLS estimator is
biased and inconsistent.
Simultaneity bias of OLS estimators: The two-way causation in a relationship
leads to violation of the important assumption of linear regression model, i.e. one
variable can be dependent variable in one of the equation but becomes also
explanatory variable in the other equations of the simultaneous-equation model.
In this case E[XiUi] may be different from zero. To show simultaneity bias, let’s
consider the following simple simultaneous equation model.
Econometrics: Module-II
Bedru B. and Seid H
Y = α 0 + α1 X + U
--------------------------------------------------(10)
X = β 0 + β 1Y + β 2 Z + V
Suppose that the following assumptions hold.
Ε(U ) = 0 ,
Ε(V ) = 0
Ε(U ) = σ ,
2
2
u
Ε(V 2 ) = σ u2
Ε(U iU j ) = 0 ,
Ε(ViV j ) = 0, also Ε(UiVi ) = 0;
where X and Y are endogenous variables and Z is an exogenous variable.
The reduced form of X of the above model is obtained by substituting Y in the
equation of X.
X = β 0 + β 1 (α 0 + α 1 X + U ) + β 2 Z + V
X =
β U +V
β 0 + α 0 β1 β 2
Z + 1
+
1 − α 1 β1
1 − α 1 β1
1 − α 1 β1
− − − − − − − − − − − − − − − − − − − − − (11)
Applying OLS to the first equation of the above structural model will result in
biased estimator because cov( X iU i ) = Ε( X iU j ) ≠ 0 . Now, let’s proof whether this
expression.
cov( XU ) = Ε[{X − Ε( X )}{U − Ε(U )}]
= Ε[{X − Ε( X )}U ] − − − − − − − − − − − − − − − − − − − − − − − − − (12)
β + α 0 β1 β 2
β U +V
Z + 1
= Ε 0
+
1 − α 1 β1
1 − α 1 β1
1 − α 1 β 1
β 0 + α 0 β 1 β 2
−
Z U
−
1 − α 1 β1
1 − α 1 β 1
Substituting the value of X in equation (11) into equation (12)
U
= Ε
( β 0 − α 0 β 1 + β 2 Z + β 1U + V − β 0 + β 1α 0 − β 2 Z )
1 − α 1 β1
U
= Ε
( β 1U + V )
1 − α 1 β1
1
Ε( β 1U 2 + UV )
=
α
β
1
−
1 1
Econometrics: Module-II
Bedru B. and Seid H
β1
βσ2
Ε(U 2 ) = 1 u ≠ 0 , since E(UV) = 0
=
1 − α 1 β1
1 − α 1 β1
That is, covariance between X and U is not zero. As a consequence, if OLS is
applied to each equation of the model separately the coefficients will turn out to be
biased. Now, let’s examine how the non-zero co-variance of the error term and
the explanatory variable will lead to biasness in OLS estimates of the parameters.
If we apply OLS to the first equation of the above structural equation (10)
Y = α 0 + α 1 X + U , we obtain
αˆ1 =
=
Σxy
Σx 2
=
Σx(Y − Y )
Σx 2
Σx(α 0 + α 1 X + U )
Σx 2
But, we know that Σx = 0 and
αˆ = α 1 +
=
=
ΣxY
Y Σx
; (since
is zero)
2
Σx
Σx 2
α 0 Σx
Σx
2
+ α1
ΣxU ΣxU
+
Σx 2
Σx 2
ΣxX
= 1 , hence
Σx 2
ΣxU
− − − − − − − − − − − − − − − − − − − − − −(13)
Σx 2
Taking the expected values on both sides;
ΣxU
Ε(αˆ ) = α 1 + Ε 2
Σx
Since, we have already proved that Ε(ΣXU ) ≠ 0 ; which is the same as Ε( XU ) ≠ 0 .
Consequently, when Ε( XU ) ≠ 0 ; Ε(αˆ ) ≠ α , that is α̂ 1 will be biased by the amount
equivalent to
Σxu
.
Σx 2
7.2 Definitions of Some Concepts
• Endogenous and exogenous variables
In simultaneous equation models variables are classified as endogenous and
exogenous. The traditional definition of these terms is that endogenous variables
are variables that are determined by the economic model (within the system) and
exogenous variables are those determined from outside. Exogenous variables are
Econometrics: Module-II
Bedru B. and Seid H
also called predetermined.
Predetermined groups can be divided into two
categories which are considered in general as exogenous variables. These are:
current and lagged exogenous and lagged endogenous.
For instance;
X t and X t −1 depict the current and lagged exogenous variables and Yt −1 depicts
lagged endogenous variable. This is on the assumption that X’s symbolize the
exogenous variables and Y’s symbolize the endogenous variables. Thus, X t , X t −1
and Yt −1 are regarded as predetermined (exogenous) variables.
Since the exogenous variables are predetermined, they are supposed to be
independent of the error terms in the model.
Consider the demand and supply functions.
Q d = β 0 + β 1 P + β 2Y + U 1 − − − − − − − − − − − − − − − − − −(14)
Q s = α 0 + α 1 P + α 2 R + U 2 − − − − − − − − − − − − − − − − − −(15)
where : Q=quantity , Y=income, P=price, R=Rainfalls, U 1 &U 2 are error terms.
Here P and Q are endogenous variables and Y and R are exogenous variables.
• Structural models
A structural model describes the complete structure of the relationships among the
economic variables. Structural equations of the model may be expressed in terms
of endogenous variables, exogenous variables and disturbances (random
variables). The parameters of structural model express the direct effect of each
explanatory variable on the dependent variable. Variables not appearing in any
function explicitly may have an indirect effect and is taken into account by the
simultaneous solution of the system. For instance, a change in consumption affects
the investment indirectly and is not considered in the consumption function. The
effect of consumption on investment cannot be measured directly by any structural
parameter, but is measured indirectly by considering the system as a whole.
Econometrics: Module-II
Bedru B. and Seid H
Example: The following simple Keynesian model of income determination can
be considered as a structural model.
C = α + β Y + U -----------------------------------------------(16)
Y = C + Z ----------------------------------------------------(17)
for α >0 and
where:
0<β<1
C=consumption expenditure
Z=non-consumption expenditure
Y=national income
C and Y are endogenous variables while Z is exogenous variable.
• Reduced form of the model:
The reduced form of a structural model is the model in which the endogenous
variables are expressed a function of the predetermined variables and the error
term only.
Illustration: Find the reduced form of the above structural model.
Since C and Y are endogenous variables and only Z is the exogenous variables,
we have to express C and Y in terms of Z. To do this substitute Y=C+Z into
equation (16).
C = α + β (C + Z ) + U
C = α + βC + βZ + U
C − β C = α + βZ + U
C (1 − β ) = α + β Z + U
C=
α
β
+
1− β 1− β
U
Z +
----------------------------------(18)
1− β
Substituting again (18) into (17) we get;
Y=
α
1
+
1− β 1− β
U
Z +
--------------------------------(19)
1− β
Econometrics: Module-II
Bedru B. and Seid H
Equation (18) and (19) are called the reduced form of the structural model of the
above. We can write this more formally as:
Structural form equations
C = α + βY + U
Reduced form equations
C=
Y =C+Z
Y=
α
β
+
1− β 1− β
U
Z +
1− β
α
U
Z +
1− β
1
+
1− β 1− β
Parameters of the reduced form measure the total effect (direct and indirect) of a
change in exogenous variables on the endogenous variable. For instance, in the
β
above reduced form equation(18),
measures the total effect of a unit
1− β
change in the non-consumption expenditure on consumption. This total effect is
1
1− β
β , the direct effect, times
,the indirect effect.
The reduced form equations can be obtained in two ways:
1) To express the endogenous variables directly as a function of the
predetermined variables.
2) To solve the structural system of endogenous variables in terms of the
predetermined variables, the structural parameters, and the disturbance
terms.
Consider the following simple model for a closed economy.
Ct = a1Yt + U1 ---------------------------------------------------------(i)
It = b1Yt + b2Yt-1 + U2-----------------------------------------------(ii)
Yt = Ct +It + Gt-------------------------------------------------------(iii)
This model has three equations in three endogenous variables (Ct , It , and Yt ) and
two predetermined variables (Gt, andYt-1).
Econometrics: Module-II
Bedru B. and Seid H
To obtain the reduced form of this model, we may use two methods (direct method
and solving the structural model method).
Direct Method: Express the three endogenous variables(Ct
,
It
,
and Yt ) as
functions of the two predetermined variables (Gt, andYt-1) directly using π’s as the
parameters of the reduced form model as follows.
Ct = π11Yt-1 + π12Gt + V1 ------------------------------------(iv)
It , =π21Yt-1 + π22Gt +V2 -------------------------------------(v)
Yt =π31Yt-1 + π32Gt + V3 ------------------------------------(vi)
Note: π11 , π12 , π21 , π22 , π31 , and π32 are reduced from parameters. By solving the
structural system of endogenous variables in terms of predetermined variables,
structural parameters and disturbances, the expressions for the reduced parameters
can be obtained easily. For instance, the third structural equation (iii) can be
expressed in reduced form as follows:
Yt = b2/ (1-a1-b1)Yt-1 + 1/(1-a1-b1) Gt + (U1 +U2)/ (1-a1-b1). This equation is
obtained by simply substituting structural equations (i) and (ii) in (iii). Form this
expression: π31 = b2/ (1-a1-b1)
π32 = b2/ (1-a1-b1)
Test yourself Questions:
a) Determine the reduced form equations for the structural equations (ii) and
(iii).
b) Indicate the expressions for π11 , π12, π21 , and π22 form (a) above.
How to estimate the reduced form parameters?
The estimates of the reduced from coefficients (π’s ) may be obtained in two ways.
1) Direct estimation of the reduced coefficients by applying OLS.
2) Indirect estimation of the reduced form coefficients:
Steps:
i)
Solve the system of endogenous variables so that each equation contains
only predetermined explanatory variables. In this way we may obtain
Econometrics: Module-II
Bedru B. and Seid H
the system of parameters’ relations (relations between
π’s and
structural parameters)
ii)
Obtain the estimates of the structural parameters by any appropriate
econometric method.
iii)
Substitute the estimates of the structural coefficients into the system of
parameters’ relations to find the estimates of the reduced coefficients,.
• Recursive models
A model is called recursive if its structural equations can be ordered in such a way
that the first equation includes only the predetermined variables in the right hand
side; the second equation contains predetermined variables and the first
endogenous variable (of the first equation) in the right hand side and so on. The
special feature of recursive model is that its equations may be estimated, one at a
time, by OLS without simultaneous equations bias.
OLS is not applicable if there is interdependence between the explanatory
variables and the error term. In the simultaneous equation models, the endogenous
variables may depend on the error terms of the model; hence the OLS technique is
not appropriate for estimation of an equation in a simulations equations model.
However, in a special type of simultaneous equations model called Recursive,
Triangular or Causal model, the use of OLS procedure of estimation is
appropriate.
Consider the following three equation system to understand the
nature of such models:
Y1 = α 10 + β 11 X 1 + β 12 X 2 + U 1
Y2 = α 20 + α 21Y1 + β 21 X 1 + β 22 X 2 + U 2
Y3 = α 30 + α 31Y1 + α 32Y2 + β 31 X 1 + β 32 X 2 + U 3
In the above illustration, as usual, the X’s and Y’s are exogenous and endogenous
variables respectively. The disturbance terms follow the following assumptions.
Ε(U 1U 2 ) = Ε(U 1U 3 ) = Ε(U 2U 3 ) = 0
Econometrics: Module-II
Bedru B. and Seid H
The above assumption is the most crucial assumption that defines the recursive
model. If this does not hold, the above system is no longer recursive and OLS is
also no longer valid. The first equation of the above system contains only the
exogenous variables on the right hand side. Since by assumption, the exogenous
variable is independent of U 1 , the first equation satisfies the critical assumption of
the OLS procedure. Hence OLS can be applied straight forwardly to this equation.
Consider the second equation. It contains the endogenous variable Y1 as one of the
explanatory variables along with non-stochastic X’s. OLS can be applied to this
equation only if it can be shown that Y1 and U 2 are independent of each other. This
is true because U1, which affects Y1 is by assumption uncorrelated with U 2 , i.e.
Ε(U 1U 2 ) = 0 .
Y1 acts as a predetermined variable in so far as Y2 is concerned.
Hence OLS can be applied to this equation. Similar argument can be stretched to
the 3rd equation because Y1 and Y2 are independent of U 3 . In this way, in the
recursive system OLS can be applied to each equation separately.
Let us build a hypothetical recursive model for an agricultural commodity, say
wheat. The production of wheat = Y1 , may be assumed to depend on exogenous
factors: X 2 = climatic conditions; and X 3 =last season’s price. The retail rice =
Y2 may be assumed to be the function of production level = Y1 and exogenous
factor X 4 = disposable income. Finally the price obtained by the producer = Y3 can
be expressed in terms of the retail price Y2 and exogenous factor X j = the cost of
marketing the producer.
The relevant equations of the model may be described as under:
Y1 = α 1 + β 2 X 2 + β 3 X 3 + U 1
Y2 = α 4 + β 1Y1 + α 5 X 4 + U 2
Y3 = α 6 + β 2Y2 + α 7 X 5 + U 3
Econometrics: Module-II
Bedru B. and Seid H
In the first equation, there are only exogenous variables and are assumed to be
independent of U 1 . In the second equation, the causal relation between Y1 and
Y2 is in one direction. Also Y1 is independent of U 2 and can be treated just like
exogenous variable. Similarly since Y2 is independent of U 3 , OLS can be applied
to the third equation. Thus, we can rewrite the above equations as follows:
Y1 − α 1 − α 2 X 2 − α 3 X 3 = U 1
− β1Y1 + Y2 − α 4 − α 5 X 4 = U 2
− β 2Y2 + Y3 − α 6 − α 7 X 5 = U 3
We can again rewrite this in matrix form as follows:
0
1
− β
1
1
0
−β
1 4 4 2 4 24
0
0
1
3
Coefficient matrix of
endogenous var iables
0
0
Y1 − α 1 − α 2 − α 3
Y + − α
0
0
− α5
0
2 4
Y3 − α 6
0
0
0
−α
1 4 4 4 4 4 4 2 4 4 4 4 4 473
coefficient matrix of
exogenous var iable
X 1 U 1
X = U
2 2
X 3 U 3
X 4
X 5
The coefficient matrix of endogenous variables is thus a triangular one; hence
recursive models are also called as triangular models.
7.3 Problems of simultaneous equation models
Simultaneous equation models create three distinct problems. These are:
1.
Mathematical completeness of the model:
any model is said to be
(mathematically) complete only when it possesses as many independent
equations as endogenous variables. In other words if we happen to know
values of disturbance terms, exogenous variables and structural
parameters, then all the endogenous variables are uniquely determined.
2.
Identification of each equation of the model: Many times it so happens
that a given set of values of disturbance terms and exogenous variables
yield the same values of different endogenous variables included in the
model. It is because the equations are observationally indistinguishable,
Econometrics: Module-II
Bedru B. and Seid H
what is needed is that the parameters of each equation in the system
should be uniquely determined.
Hence, certain tests are required to
examine the identification of each equation before its estimation.
3.
Statistical estimation of each equation of the model: Since application
of OLS yield biased and inconsistent estimates, different statistical
techniques are to be developed to estimate the structural parameters.
Some of the most common simultaneous methods* of estimation are:
i)
The indirect least square method(ILS)
ii)
The two-stage least square method(2SLS)
iii)
The three-stage least square method(3SLS)
iv)
Limited information maximum likelihood method (LIML)
v)
The instrumental variable method (IV)
vi)
The mixed estimation method; and
vii)
The full information maximum likelihood method (FIML)
Of the three problems, we are going to discuss the second problem (the
identification problem) in the following section.
7. 4 The identification problem
In simultaneous equation models, the Problem of identification is a problem of
model formulation; it does not concern with the estimation of the model. The
estimation of the model depends up on the empirical data and the form of the
model. If the model is not in the proper statistical form, it may turn out that the
parameters may not uniquely estimated even though adequate and relevant data
are available. In a language of econometrics, a model is said to be identified only
when it is in unique statistical form to enable us to obtain unique estimates of its
parameters from the sample data. To illustrate the problem identification, let’s
consider a simplified wage-price model.
*
These methods of estimation are not discussed in this module as they are beyond the scope of this
introductory course.
Econometrics: Module-II
Bedru B. and Seid H
W = α + βP + ϒE + U --------------------------------------(i)
P = λ + µ W + V ------------------------------------------------(ii)
where W and P are percentage rates of wage and price inflation respectively, E is a
measure of excess demand in the labor market while U and V are disturbances, E
is assumed to be exogenously determined. If E is assumed to be exogeneoulsy
determined, then (i) and (ii) represent two equations determining two endogenous
variables: W and P. Let’s explain the problem of identification with help of these
two equations of a simultaneous equation model.
Let’s use equation (ii) to express ‘W’ in terms of P:
W =
−λ
µ
+
1
µ
P−
V
µ
-------------------------------------------------(iii)
Now, suppose A and B are any two constants. Let’s multiply equation (i) by A,
multiply equation (ii) by B and then add the two equations. This gives
( A + B )W = Aα − B
λ
B
B
+ Aβ + P + AϒE + AU − V
µ
µ
µ
or
B
Bλ Aβ + B
AU − V
µ
Aϒ
µ -------------------(iv)
V +
P+
E +
A+ B
A+ B
A+ B
A+ B
Aα −
W=
Equation (iv) is what is known as a linear combination of (i) and (ii). The point
about equation (iv) is that it is of the same statistical form as the wage equation (i).
That is, it has the form:
W = constant + (constant)P + (constant)E + disturbance
Moreover, since A and B can take any values we like, this implies that our wage
price model generates an infinite number of equations such as (iv), which are all
statistically indistinguishable from the wage equation (i). Hence, if we apply OLS
or any other technique to data on W, P and E in an attempt to estimate the wage
equation, we can’t know whether we are actually estimating (i) rather than one of
the infinite number of possibilities given by (iv). Equation (i) is said to be
Econometrics: Module-II
Bedru B. and Seid H
unidentified, and consequently there is now no way in which unbiased or even
consistent estimators of its parameters may be obtained.
Notice that, in contrast, price equation (ii) cannot be confused with the linear
combination (iv), because it is a relationship involving W and P only and does not,
like (iv), contain the variable E. The price equation (ii) is therefore said to be
identified, and in principle it is possible to obtain consistent estimates of its
parameters. A function (an equation) belonging to a system of simultaneous
equations is identified if it has a unique statistical form, i.e. if there is no other
equation in the system, or formed by algebraic manipulations of the other
equations of the system, contains the same variables as the function(equation) in
question.
Identification problems do not just arise only on two equation-models. Using the
above procedure, we can check identification problems easily if we have two or
three equations in a given simultaneous equation model.
However, for ‘n’
equations simultaneous equation model, such a procedure is very cumbersome. In
general for any number of equations in a given simultaneous equation, we have
two conditions that need to be satisfied to say that the model is in general
identified or not. In the following section we will see the formal conditions for
identification.
7. 5 Formal Rules (Conditions) for Identification
Identification may be established either by the examination of the specification of
the structural model, or by the examination of the reduced form of the model.
Traditionally identification has been approached via the reduced form. Actually
the term ‘identification’ was originally used to denote the possibility (or
impossibility) of deducing the values of the parameters of the structural relations
from a knowledge of the reduced form parameters. In this section we will examine
Econometrics: Module-II
Bedru B. and Seid H
both approaches.
However, we think that the reduced form approach is
conceptually confusing and computationally more difficult than the structural
model approach, because it requires the derivation of the reduced from first and
then examination of the values of the determinant formed form some of the
reduced form coefficients. The structural form approach is simpler and more
useful.
In applying the identification rules we should either ignore the constant term, or, if
we want to retain it, we must include in the set of variables a dummy variable (say
X0) which would always take on the value 1. Either convention leads to the same
results as far as identification is concerned. In this chapter we will ignore the
constant intercept.
7.5.1 Establishing identification from the structural form of the model
There are two conditions which must be fulfilled for an equation to be identified.
1. The order condition for identification
This condition is based on a counting rule of the variables included and excluded
from the particular equation. It is a necessary but not sufficient condition for the
identification of an equation. The order condition may be stated as follows.
For an equation to be identified the total number of variables (endogenous and
exogenous) excluded from it must be equal to or greater than the number of
endogenous variables in the model less one. Given that in a complete model the
number of endogenous variables is equal to the number of equations of the model,
the order condition for identification is sometimes stated in the following
equivalent form. For an equation to be identified the total number of variables
excluded from it but included in other equations must be at least as great as the
number of equations of the system less one.
Let:
G = total number of equations (= total number of endogenous variables)
K= number of total variables in the model (endogenous and predetermined)
Econometrics: Module-II
Bedru B. and Seid H
M= number of variables, endogenous and exogenous, included in a
particular equation.
Then the order condition for identification may be symbolically expressed as:
(K − M ) ≥
(G − 1)
excluded
var iable ≥ [total number of equatioins − 1]
For example, if a system contains 10 equations with 15 variables, ten endogenous
and five exogenous, an equation containing 11 variables is not identified, while
another containing 5 variables is identified.
a. For the first equation we have
G = 10
K = 15
M = 11
Order condition:
( K − M ) ≥ (G − 1)
; that is, the order condition is not satisfied.
(15 − 11) < (10 − 1)
b. For the second equation we have
G = 10
K = 15
M =5
order condition:
( K − M ) ≥ (G − 1)
(15 − 5) < (10 − 1)
; that is, the order condition is satisfied.
The order condition for identification is necessary for a relation to be identified,
but it is not sufficient, that is, it may be fulfilled in any particular equation and yet
the relation may not be identified.
2. The rank condition for identification
The rank condition states that: in a system of G equations any particular equation
is identified if and only if it is possible to construct at least one non-zero
determinant of order (G-1) from the coefficients of the variables excluded from
that particular equation but contained in the other equations of the model. The
practical steps for tracing the identifiablity of an equation of a structural model
may be outlined as follows.
Econometrics: Module-II
Bedru B. and Seid H
Firstly. Write the parameters of all the equations of the model in a separate table,
noting that the parameter of a variable excluded from an equation is equal to zero.
For example let a structural model be:
y1 = 3 y 2 − 2 x1 + x 2 + u1
y 2 = y 3 + x3 + u 2
y3 = y1 − y 2 − 2 x3 + u 3
where the y’s are the endogenous variables and the x’s are the predetermined
variables. This model may be rewritten in the form
− y1 + 3 y 2 + 0 y 3 − 2 x1 + x 2 + 0 x3 + u1 = 0
0 y1 − y 2 + y 3 + 0 x1 + 0 x 2 + x3 + u 2 = 0
y1 − y 2 − y 3 + 0 x1 + 0 x 2 − 2 x3 + u 3 = 0
Ignoring the random disturbance the table of the parameters of the model is as
follows:
Variables
Equations
Y1
Y2
Y3
X1
X2
X3
1st equation
2nd equation
3rd equation
-1
0
1
3
-1
-1
0
1
-1
-2
0
0
1
0
0
0
1
-2
Secondly.
Strike out the row of coefficients of the equation which is being
examined for identification. For example, if we want to examine the identifiability
of the second equation of the model we strike out the second row of the table of
coefficients.
Thirdly. Strike out the columns in which a non-zero coefficient of the equation
being examined appears. By deleting the relevant row and columns we are left
with the coefficients of variables not included in the particular equation, but
contained in the other equations of the model. For example, if we are examining
for identification the second equation of the system, we will strike out the second,
third and the sixth columns of the above table, thus obtaining the following tables.
Econometrics: Module-II
Bedru B. and Seid H
Table of structural parameters
Y1
Y2
Y3
-1
1
nd
0
→2
rd
1
3
↓
3
-1
-1
↓
0
1
-1
st
Table of parameters of excluded variables
X1
-2
0
0
X2
X3
Y3
X1
X2
1
0
0
↓
0
1
-2
-1
-2
1
1
0
0
Fourthly. Form the determinant(s) of order (G-1) and examine their value. If at
least one of these determinants is non-zero, the equation is identified. If all the
determinants of order (G-1) are zero, the equation is underidentified.
In the above example of exploration of the identifiability of the second structural
equation we have three determinants of order (G-1)=3-1=2. They are:
∆1 =
−1 − 2
1
0
≠0
∆2 =
−2
1
0
0
=0
∆3 =
−1
1
1
0
≠0
(the symbol ∆ stands for ‘determinant’) We see that we can form two non-zero
determinants of order G-1=3-1=2; hence the second equation of our system is
identified.
Fifthly. To see whether the equation is exactly identified or overidentified we use
the order condition ( K − M ) ≥ (G − 1). With this criterion, if the equality sign is
satisfied, that is if ( K − M ) = (G − 1) , the equation is exactly identified. If the
inequality sign holds, that is, if ( K − M ) < (G − 1) , the equation is overidentified.
In the case of the second equation we have:
G=3 K=6 M=3
And the counting rule ( K − M ) ≥ (G − 1) gives
(6-3)>(3-1)
Therefore the second equation of the model is overidentified.
The identification of a function is achieved by assuming that some variables of the
model have zero coefficient in this equation, that is, we assume that some
variables do not directly affect the dependent variable in this equation. This,
however, is an assumption which can be tested with the sample data. We will
Econometrics: Module-II
Bedru B. and Seid H
examine some tests of identifying restrictions in a subsequent section. Some
examples will illustrate the application of the two formal conditions for
identification.
Example 1. Assume that we have a model describing the market of an agricultural
product. From the theory of partial equilibrium we know that the price in a market
is determined by the forces of demand and supply. The main determinants of the
demand are the price of the commodity, the prices of other commodities, incomes
and tastes of consumers. Similarly, the most important determinants of he supply
are the price of the commodity, other prices, technology, the prices of factors of
production, and weather conditions. The equilibrium condition is that demand be
equal to supply. The above theoretical information may be expressed in the form
of the following mathematical model.
D = a 0 + a1 P1 + a 2 P2 + a3Y + a 4 t + u
D = b0 + b1 P1 + b2 P2 + b3 C + b4 t + w
D=S
Where: D= quantity demanded
S= quantity supplied
P1 = price of the given commodity
P2 = price of other commodities
Y= income
C= costs (index of prices of factors of production)
t= time trend. In the demand function it stands for ‘tastes’; in the supply function it stands for
‘technology’.
The above model is mathematically complete in the sense that it contains three
equations in three endogenous variables, D,S and P1. The remaining variables, Y,
P2, C, t are exogenous. Suppose we want to identify the supply function. We
apply the two criteria for identification:
1. Order condition: ( K − M ) ≥ (G − 1)
In our example we have:
Therefore,
K=7 M=5 G=3
(K-M)=(G-1) or (7-5)=(3-1)=2
Econometrics: Module-II
Bedru B. and Seid H
Consequently the second equation satisfies the first condition for identification.
2. Rank condition
The table of the coefficients of the structural model is as follows.
Variables
Equations
st
1 equation
2nd equation
3rd equation
D
P1
P2
-1
0
1
a1
b1
a2
b2
0
0
Y
a3
0
0
t
S
C
a4
b4
0
-1
1
b3
0
0
0
Following the procedure explained earlier we strike out the second row an the
second, third, fifth, sixth and seventh columns. Thus we are left with the table of
the coefficients of excluded variables:
Complete table of
Structural parameters
-1
0
1
a1
b1
a2
b2
Table of parameters of
variables excluded from
the second equation
a3
0
0
a4
b4
0
1
1
0
-1
a3
b3
-1
1
0
0
0
0
From this table we can form only one non-zero determinant of order
(G-1) = (3-1) =2
∆=
−1
a3
−1
0
= (0)(−1) − (−1)(a3 ) = a 3
The value of the determinant is non-zero, provided that a3 ≠ 0 .
We see that both the order and rank conditions are satisfied. Hence the second
equation of the model is identified.
condition the equality holds:
Furthermore, we see that in the order
(7-5) = (3-1) = 2.
Consequently the second
structural equation is exactly identified.
Example 2. Assume the following simple version of the Keynesian model of
income determination.
Consumption function:
C t = a 0 + a1Yt − a 2Tt + u
Investment function:
I t = b0 + b1Yt −1 + u
Taxation function:
Tt = c0 + c1Yt + w
Definition:
Yt = C t + I t + Gt
Econometrics: Module-II
Bedru B. and Seid H
This model is mathematically complete in the sense that it contains as many
equations as endogenous variables. There are four endogenous variables, C,I,T,Y,
and two predetermined variables, lagged income (Yt −1 ) and government
expenditure (G).
A. The first equation (consumption function) is not identified
1. Order condition: ( K − M ) ≥ (G − 1)
There are six variables in the model (K=6) and four equations (G=4).
The
consumption function contains three variables (M=3).
(K-M)=3
and
(G-1)=3
Thus (K-M)=(G-1), which shows that the order condition for identification is
satisfied.
2. Rank condition
The table of structural coefficients is as follows
Variables
Equations
C
Y
T
I
Yt −1
G
1st equation
2nd equation
3rd equation
4th equation
-1
a1
a2
0
0
0
-1
0
0
-1
0
1
0
0
0
1
0
1
1
C1
-1
b1
0
0
We strike out the first row and the three first columns of the table and thus obtain
the table of coefficients of excluded variables.
Complete table of
structural parameters
Table of coefficients of
excluded variables
-1 a1 a 2 0
0
0
b1
0
0
-1
0
0
0 -1 b1
0 c1 -1 0
0
0
0
0
0
1 -1 0
1
1
-1
0
0
0
We evaluate the determinant of this table. Clearly the value of this determinant is
zero, since the second row contains only zeros. Consequently we cannot form any
Econometrics: Module-II
Bedru B. and Seid H
nonzero determinant of order 3(=G-1). The rank condition is violated. Hence we
conclude that the consumption function is not identified, despite the satisfaction of
the order criterion.
B. The investment function is overidentified
1. Order condition
The investment function includes two variables. Hence
K-M = 6-2
Clearly (K-M) > (G-1), given that G-1=3. The order condition is fulfilled.
2. Rank condition
Deleting the second row and the fourth and fifth columns of the structural
coefficients table we obtain .
Complete table of structural
Parameters
-1
0
0
1
a1
a2
0
0
-1
0
c1
-1
0
-1
0
1
0
b1
0
0
Table of coefficients of
excluded variables
0
0
0
1
-1
0
-1
a1
c1
-1
a2
-1
0
0
0
1
The value of the first 3x3 determinant of the parameters of excluded variables is
∆ 1 = −1
c1
−1
−1
0
− a1
0
1
0
−1
+ a2
0
1
c1
−1
= 1 + a1 − a 2 c1 ≠ 0
(provided a1 − a 2 c1 ≠ −1 )
The rank condition is satisfied since we can construct at least one non-zero
determinant of order 3=(G-1).
Applying the counting rule ( K − M ) ≥ (G − 1) we see that the inequality sign holds:
4>3; hence the investment function is overidentified.
Self-test Question: Detect the identificability of the tax equation .
Econometrics: Module-II
Bedru B. and Seid H
7.5.2 Establishing identification from the reduced form
Like that of the identification conditions from structural equations, there are two
conditions for identification based on the reduced form of the model, an order
condition and a rank condition.
The order condition is the same as in the
structural model. The rank condition here refers to the value of the determinant
formed from some of the reduced form parameters, π‘s.
1. Order condition (necessary condition), as applied to the reduced form
An equation belonging to a system of simultaneous equations is identified if
(K − M )
≥
(G − 1)
Total number of number of
excluded var iables ≥ equations less one
where K, M and G have the same meaning as before:
K= total number of variables, endogenous and exogenous, in the entire
model
M= number of variables, endogenous and exogenous, in any particular
equation
G= number of structural equations=number of all endogenous variables in
the model
If (K-M) = (G-1), the equation is exactly identified, provided that the rank
condition set out below is also satisfied. If (K-M)>(G-1), the equation is
overidentified, while if (K-M)<(G-1), the equation is underidentified, under the
same proviso.
2.Rank condition as applied to the reduced form
Let G* stand for the number of endogenous variables contained in a particular
equation. The rank condition as applied to the reduced form may be stated as
follows.
An equation containing G* endogenous variables is identified if and only if it is
possible to construct at least one non-zero determinant of order G*-1 from the
Econometrics: Module-II
Bedru B. and Seid H
reduced form coefficients of the exogenous (predetermined) variables excluded
from that particular equation.
The practical steps involved in this method of identification may be outlined as
follows.
Firstly. Obtain the reduced form of structural model. For example assume that
the original model is
y1 = b12 y 2 + y11 x1 + y12 x 2 + u1
y 2 = b23 y 3 + y 23 x3 + u 2
y3 = b31 y1 + b32 y 2 + y 33 x3 + u 3
This model is complete in the sense that it contains three equations in three
endogenous variables. The model contains altogether six variables, three
endogenous ( y1 , y 2 , y 3 ) and three exogenous ( x1 , x 2 , x3 ).
The reduced form of the model is obtained by solving the original equations for
the exogenous variables. The reduced form in the above example is:
y1 = π 11 x1 + π 12 x 2 + π 13 x3 + v1
y 2 = π 21 x1 + π 22 x 2 + π 23 x3 + v 2
y3 = π 31 x1 + π 32 x 2 + π 33 x3 + v3
where the π’s are functions of the structural parameters.
Secondly. Form the complete table of the reduced form coefficients.
Exogenous Variables
Equations
1st equation: y1
2nd equation: y 2
3rd equation: y 3
x1
x2
x3
π 11
π 12
π 13
π 21
π 31
π 22
π 32
π 23
π 33
Strike out the rows corresponding to endogenous variables excluded from the
particular equation being examined for identifiability. Also strike out all the
Econometrics: Module-II
Bedru B. and Seid H
columns referring to exogenous variables included in the structural form of the
particular equation.
After these deletions we are left with the reduced form coefficients of exogenous
variables excluded (absent) from the structural equation. For example, assume that
we are investigating the identification procedure are found by striking out the first
row (since y1 , does not appear in the second equation) and the third column
(since x3 , is included in this equation).
Complete table of reduced
form coefficients
Table of reduced form
coefficients of excluded
exogenous variables
π 11
π 12
π 13
π 21
π 21
π 31
π 22
π 32
π 23
π 33
π 31
π 22
π 32
Thirdly. Examine the order of the determinants of the π’s of excluded exogenous
variables and evaluate them. If the order of the larges non-zero determinant is
G*-1, the equation is identified. Otherwise the equation is not identified.
Major References
Gujarati, D.N., 1995. Basic Econometrics (3rd ed.), Mc Graw Hill
Koutsoyiannis, A., 1997. Theory of Econometrics (2nd ed.), Macmillan
Madanani, G.M.K., 1995. Basic Econometrics (3rd ed.), Macmillan
Thomas,R.L., 1997. Modern Economtetrics: An Introduction, Addison-wesley
We hope you enjoyed the reading! Any comments are welcome!
Econometrics: Module-II