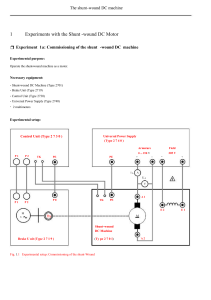
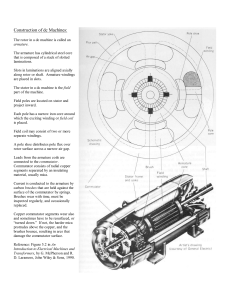
DC Machines Dr Gamal M. A. Sowilam DC Machine Fundamentals Electrical Energy Applications such as light bulbs and heaters. Mechanical Energy Applications, such as fans and rolling mills, Converters that are used to continuously translate electrical input to mechanical output or vice versa are called electric machines. The process of translation is known as electromechanical energy conversion. If the conversion is from mechanical to electrical, the machine is said to act as a generator. If the conversion is from electrical to mechanical, the machine is said to act as a motor. Electromechanical energy conversion. In these machines, conversion of energy from electrical to mechanical form or vice versa results from the following two electromagnetic phenomena: 1. When a conductor moves in a magnetic field, voltage is induced in the conductor. 2. When a current-carrying conductor is placed in a magnetic field, the conductor experiences a mechanical force. Any DC machine can act either as a generator or as a motor. Electrical and mechanical, are different in nature. In the electrical system the primary quantities involved are voltage and current, while the analogous quantities in the mechanical system are torque and speed. Coupling field between electrical and mechanical systems. DC Machine Fundamentals DC Machine is most often used for a motor. The major advantages of dc machines are the easy speed and torque regulation. Applications: machine tools, conveyors, fans, pumps, hoists, cranes, paper mills, rolling mills, etc (large), traction motors (medium), and control devices (small) The electronically controlled ac drives are gradually replacing the dc motor drives in factories. Nevertheless, a large number of dc motors are still used by industry and several thousand are sold annually. Motional Voltage, e if a conductor of length l moves at a linear speed v in a magnetic field B, the induced voltage in the conductor is where B, l, and v are mutually perpendicular. The polarity of the induced voltage can be determined from the so-called right-hand screw rule. Electromagnetic Force, f For the current-carrying conductor shown in Figure, the force (known as Lorentz force) produced on the conductor is The direction of the force can be determined by using the right-hand screw rule If a screw is turned in the same way, the direction in which the screw will move represents the direction of the force f. Basic Structure of Electric Machines Cylindrical machine (uniform air gap). Salient pole machine (non-uniform air gap). Structure of electric machines. Stator: This part of the machine does not move and normally is the outer frame of the machine. Rotor: This part of the machine is free to move and normally is the inner part of the machine. If the stator or rotor (or both) is subjected to a time-varying magnetic flux, the iron core is laminated to reduce eddy current losses. The thin laminations of the iron core with provisions for slots The conductors placed in the slots of the stator or rotor are interconnected to form windings. The winding in which voltage is induced is called the armature winding. The winding through which a current is passed to produce the primary source of flux in the machine is called the field winding. Permanent magnets are used in some machines to provide the major source of flux in the machine. DC Machine Variable speed, large and small power range. Field winding produces flux symmetrically distributed about pole axis = direct axis. Armature winding in rotor Alternating voltage is induced. Mechanical commutator and brush assembly rectify the voltage. Commutator-brush combination makes armature current distribution fixed in space. mmf of armature winding along quadratic axis maximum torque EVOLUTION OF DC MACHINES Consider a turn a-b placed on diametrically opposite slots of the rotor. The two terminals a and b of the turn are connected to two slip rings. Two stationary brushes pressing against the slip rings provide access to the revolving turn a-b. There are two voltages are in series and aid each other. The voltage induced in the turn, eab (same as the voltage e12 across the brushes), is alternating in nature, and its waveform is the same as that of the flux density distribution wave in space. Induced voltage in a dc machine. (a) Two-pole de machine. (b) Induced voltage in a turn. Let us now replace the two slip rings by two commutator segments (which are copper segments separated by insulating materials) as shown in Figure. Segment C, is connected to terminal a of the turn and segment C, to terminal b of the turn. For counterclockwise motion of the rotor the terminal under the N pole is positive with respect to the terminal under the S pole. Voltage rectification by commutators and brushes. (a) DC machine with commutator segments. (b) Single-turn machine. (c) Multi-turn machine. Current reversal in a turn by commutators and brushes. (a) End a touches brush B1 ; current flows from a to b. (b) The turn is shorted; turn is in inter-polar region. (c) End a touches brush B2 ; current flows from b to a. Note that turn a-b is short-circuited by the brushes when its sides pass midway between the field poles (i.e., the q-axis). In the case of a dc motor, current will be fed into the armature through the brushes. The current in the turn will reverse when the turn passes the inter-polar region and the commutator segments touch the other brushes. DC Machines Construction • Stator: Stationary part of the machine. The stator carries a field winding that is used to produce the required magnetic field by dc excitation. Often know as the field. • Rotor: The rotor is the rotating part of the machine. The rotor carries a distributed winding, and is the winding where the emf is induced. Also known as the armature. • The field windings produce an air gap flux distribution that is symmetrical about the pole axis (also called the field axis, direct axis, or d-axis ). • The voltage induced in the turns of the armature winding is alternating. A commutator-brush combination is used as a mechanical rectifier to make the armature terminal voltage unidirectional and also to make the mmf wave due to the armature current fixed in space. The brushes are so placed that when the sides of an armature turn (or coil) pass through the middle of the region between field poles, the current through it changes direction. This makes all the conductors under one pole carry current in one direction. As a consequence, the mmf due to the armature current is along the axis midway between the two adjacent poles, called the quadrature (or q) axis. For improved performance, interpoles (in between two main field poles) and compensating windings (on the face of the main field poles) are required. DC motor stator with poles Rotor of a dc motor. Details of the commutator of a dc motor. Armature Windings Large machines have more than two poles most of the conductors are in region of high flux density • electrical degrees θed • mechanical degrees θmd • p number of poles ed p md 2 • pole pitch = distance between centers of two adjacent poles =180oed • coil pitch = distance between two sides of a coil • full-pitch coil pitch = pole pitch • short-pitch: coil pitch < pole pitch (mainly in ac-machines) Armature Windings - Lap winding one coil between two adjacent commutator bars 1/p of the total coils are connected in series suitable for high-current low voltage number of parallel paths = number of poles = number of brushes Armature Windings - Wave winding p/2 coil connected in series between two adjacent commutator bars. The brushes are located under the field poles at their centers. suitable for high voltage low current. • number of parallel paths = 2 • number of brushes positions = 2 or more • number of brushes is increased in large machines to minimize the current density In brushes. Armature Windings - Voltage As the armature rotates in the magnetic field produced by the stator poles, voltage is induced in the armature winding. The induced voltage in a turn a-b The average value of the induced voltage in the turn is p et 2 B() lm r m B() A 2 rl p The voltages induced in all the turns connected in series for one parallel path across the positive and negative brushes will contribute to the average terminal voltage Ea. N Np Ea et m K a m a a N = total number of turns in the armature winding a = number of parallel paths Ka Np a Ka Zp 2 a Z the total number of conductors =2N Ea independent of operation mode • in generator: generated voltage • in motor back emf Armature Windings - Torque The force on a conductor Ia f c B()lic B()l a The torque on a conductor Tc f c r The average torque on a conductor Ia pI a Tc B( ) l r a 2 a The total torque developed T 2 NTc N p I a K a I a a • Machine constant Np Ka a Power balance T K a I a E a K a m E a I a K a m I a T m Example 1 A four pole dc machine has an armature of radius 15 cm and an effective length of 30 cm. The poles cover 75% of the armature periphery. The armature winding consists of 35 coils, each coil having seven turns. The coils are accommodated in 35 slots. The average flux density under each pole is 0.85T. If the armature is lap-wound, (a) Determine the armature constant Ka. (b) Determine the induced armature voltage when the armature rotates at 1000 rpm. (c) The current in the coil and electromagnetic torque developed when the armature current is 400 A. (d) The power developed by the armature. Example 2 If the dc machine armature in example 1 is wave-wound, repeat parts (a)-(d). Example 3 A lap-wound armature is used in a six-pole dc machine. There are 72 coils on the armature, each containing 12 turns. The flux per pole in the machine is 0.039 Wb and the machine spins at 400 rpm. Determine the induced voltage Ea. Example 4 A 12 pole dc generator a wave wound armature containing 144 coils of 10 turns each. Flux per pole is 0.05 Wb and it is running at a speed 200 rpm. a) Ea = ? b) If a 1k ohm resistor is connected to the terminals of generator, T = ? Magnetization A dc machine has two circuits: a field circuit and an armature circuit. The mmf produced by these two circuits are: the field mmf is along the direct axis and the armature mf is along the quadrature axis. The flux passes through the pole, air gap, rotor teeth, rotor core, rotor teeth, air gap, and opposite pole and returns through the yoke of the stator of the machine. Review d-q axis At low values of flux, the magnetic material may be considered to have infinite permeability. The magnetic flux in each pole is then If Fp is increased, flux will increase and saturation will occur in various parts of the magnetic circuit, particularly in the rotor teeth. It is more convenient if the magnetization curve is expressed in terms of armature induce voltage Ea at a particular speed (Fig. a). The magnetization curve obtained experimentally by rotating the dc machine at 1000 rpm and measuring the open-circuit armature terminal voltage as the current in the field winding is changed (Fig b). Represents the saturation level in the magnetic system of the dc machine for various values of the excitation mmf. Classification of DC Machines The field circuit and armature circuit can be interconnected in various ways to provide a wide variety of performance characteristics-an out standing advantage of dc machines. The field poles can be excited by two field windings, a shunt filed winding and a series field winding. The shunt winding has a large number of turns and takes only a small current (< 5% rated armature current). The series winding has fewer turns but carries a large current. If both windings are used, the series winding is wound on top of the shunt winding. The various connections of the field circuit and armature circuit are shown in the figures. In the separately excited dc machine, the field winding is excited from a separate source. In the self-excited dc machine, the field winding may be connected in series with the armature, resulting a series dc machine. It may connected across the armature, resulting in a shunt machine. Both shunt and series windings may be used , resulting in a compound machine. If the shunt winding is connected across the armature, it is known as shortshunt machine. In an alternative connection, the shunt winding is connected across the series connection of armature and series winding, and the machine is known as long-shunt machine. DC Motors The dc machine can operate as a generator and as a motor. When the dc machine operates as a motor, the input to the machine is electrical power and the output is mechanical power. In fact, the dc machine is used more as a motor. DC motors can provide a wide range of accurate speed and torque control. DC motor • Separately Excited and Shunt Motors Field and armature windings are either connected separate or in parallel. • Series Motors Field and armature windings are connected in series. • Compound Motors Has both shunt and series field so it combines features of series and shunt motors. Comparisons of DC Motors Shunt Motors: “Constant speed” motor (speed regulation is very good). Adjustable speed, medium starting torque. Applications: centrifugal pump, machine tools, blowers fans, reciprocating pumps, etc. Series Motors: Variable speed motor which changes speed drastically from one load condition to another. It has a high starting torque. Applications: hoists, electric trains, conveyors, elevators, electric cars. Compound motors: Variable speed motors. It has a high starting torque and the no-load speed is controllable unlike in series motors. Applications: Rolling mills, sudden temporary loads, heavy machine tools, punches, etc Shunt Motor The armature circuit and the shunt field circuit are connected across a dc source of fixed voltage Vt Separately Excited DC Motor Example 5 A variable speed drive system uses a dc motor which is supplied from a variable-voltage source. The drive speed is varied from 0 to 1500 rpm (base speed) by varying the terminal voltage from 0 to 500 V with the field current maintained constant. (a) Determine the motor armature current if the torque is held constant at 300N up to the base speed. (b) Determine the torque available at a speed of 3000 rpm if the armature current is held constant at the value obtained in part (a). Neglect all losses. Series Motor Example 6 A 220 V, 7 hp series motor is mechanically coupled to a fan and draws 25 amps and runs at 300 rpm when connected to a 220 V supply with no external resistance connected to the armature circuit ( Rae= 0). The torque required by the fan is proportional to the square of the speed. Ra= 0.6 ohm and Rsr= 0.4 ohm. Neglect armature reaction and rotational loss. (a) Determine the power delivered to the fan and the torque developed by the machine. (b) The speed is to be reduced to 200 rpm by inserting a resistance Rae in the armature circuit. Determine the value of this resistance and the power delivered to the fan. Power Flow and Efficiency of dc motor How to obtain the following characteristics Speed Control Numerous applications require control of speed, as in rolling mills, cranes, hoists, elevators, machine tools, and locomotive drives. DC motors are extensively used in many of these applications. Control of dc motors speed below and above the base (rated) speed can easily be achieved. The methods of control are simpler and less expensive than ac motors. Solid-State Control In recent years, solid state converters have been used to control the speed of dc motors. The converter used are controlled rectifiers or choppers: Controlled Rectifiers If the supply is ac, controlled rectifiers can be used to convert a fixed ac supply voltage into variable-voltage dc supply. Choppers A solid state chopper converts a fixed-voltage dc supply into a variable-voltage dc supply. Closed-loop Operation Open loop operation: If load torque changes, the speed will change too. May not be satisfactory in many applications where a constant speed is required Close loop operation: the speed can be maintained constant by adjusting the motor terminal voltage as the load torque changes. DC GENERATORS 1. Separately excited dc generator Armature Reaction (AR) If the current flows in the armature circuit it produces its own mmf (hence flux) acting along the qaxis. The flux produced by the armature mmf opposes flux in the pole under one half of the pole and aids under the other half of the pole, Compensating Winding The zero flux density region shifts from the q-axis and this causes poor commutation leading to sparking. Much of the rotor mmf can be neutralized by using a compensating winding, which is fitted in slots cut on the main pole faces. The compensating winding is connected in series with the armature winding so that its mmf is proportional to the armature mmf. EXAMPLE A 12 kW, 100 V, 1000 rpm dc shunt generator has armature resistance Ra = 0.1 , shunt field winding resistance Rfw= 80 , and Nf= 1200 turns per pole. The rated field current is 1 ampere. The magnetization characteristic at 1000 rpm is shown in Figure. The machine is operated as a. separately excited dc generator at 1000 rpm with rated field current (a) Neglect the armature reaction effect. Determine the terminal voltage at full load. (b) Consider that armature reaction at full load is equivalent to 0.06 field amperes. (i) Determine the full-load terminal voltage. (ii) Determine the field current required to make the terminal voltage Vt = 100 V at full-load condition. Solution (a) (b) (i) From Figure, at this field current =0.94A (ii) From Figure, the effective field current required is SHUNT (SELF-EXCITED) GENERATOR Voltage buildup in a self-excited dc generator. 1. Residual magnetism must be present in the magnetic system. 2. Field winding mmf should aid the residual magnetism. 3. Field circuit resistance should be less than the critical field circuit resistance. Effect of field resistance. EXAMPLE The dc machine in above Example is operated as a self-excited (shunt) generator at no load. (a) Determine the maximum value of the generated voltage. (b) Determine the value of the field circuit control resistance (Rfc) required to generate rated terminal voltage. (c) Determine the value of the critical field circuit resistance. Solution (a) The maximum voltage will be generated at the lowest value of the field circuit resistance, Rfc = 0. Draw a field resistance line (Figure) for Rf = Rfw= 80 . The maximum generated voltage is (b) Draw a field resistance line that intersects the magnetization curve at 100 V (Figure). For this case, (c) Draw the critical field resistance line passing through the linear portion of the magnetization curve (Figure. For If = 0.5, Ea is 85 V. COMPOUND DC MACHINES Short Shunt Equivalent circuits of compound de machines of Short shunt. (b) Long shunt. Long Shunt Equivalent circuits of compound dc machines of Long shunt. For either connection, assuming magnetic linearity, the generated voltage is When these two fluxes aid each other the machine is called a cumulative compound machine, and when they oppose each other the machine is called a differential compound machine. SERIES GENERATOR Power Flow and Efficiency of dc generator