POSITION
CONTENT
EQUIPMENT
REQUIRED
CONTROL
ASSIGNMENT
SYSTEM
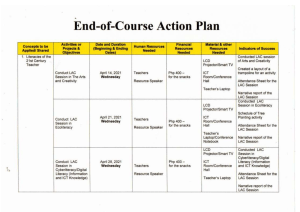
The use of motor drive in an open
system is investigated.
loop positional control
Qty
Designation
Description
1
OA150A
Op Amp Unit
AU150B
Attenuator Unit
PA150C
Pre-Amp Unit
SA150D
Servo Amplifier
PS150E
Power Supply
DCM150F
DC Motor
IP150H
Input Potentiometer
OP150K
Output Potentiometer
GT150X
Reduction Gear Tacho Unit
DC Voltmeter 30-0-30V
(or voltmeter in GT150X)
PRELIMINARY
PROCEDURE
mM
Attach the OA150A, PS150E, IP150H and OP150K to the
Baseplate by means of the magnetic fixings.
m™
Connect the Power Supply to the mains supply line. DO
NOT switch on yet.
56
5
oa (ae fi eine tot te ee
SIMPLE
*
Modular Servo
Scanned
by CamScanner
Scanned by
|b bok
ww
Modular Servo
SIMPLE
POSITION
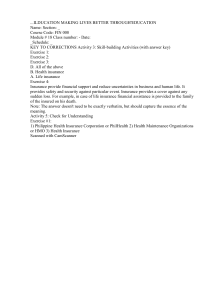
OBJECTIVE
CONTROL
ASSIGNMENT
5
When you have completed this assignment you will:
™
M™
KNOWLEDGE
LEVEL
SYSTEM
Have observed the operation of a basic open-loop position
control system.
Appreciate the need for closed-loop feedback in a position
control system.
Before starting this assignment you should:
M™
Be familiar with the components of the DC Modular Servo
and preferably have completed Assignment 1,
Familiarisation.
Understand the term ‘error channel’.
mM
Understand how two rotary potentiometers can be used to
form an error channel.
BELEK
EUDUDU
UU
Mm
a7
Scanned
by CamScanner
Scanned by
Position
INTRODUCTION
Control
System
Assignment
5
Two rotary potentiometers can be used to generate an error
signal to show the misalignment of the output cursor with that
of the input cursor.
Now if the output potentiometer is mounted on the shaft of a
geared motor, we would have the basis of an automatic
position control system. That is, we use the error signal to drive
the motor in a direction such as to reduce the misalignment to
zero.
Before going on to carry out such an investigation, it would be
as well to see what happens in a manual system.
So
set up as in fig 3.5.1, but remember
students
will
to
work
together
to
that ideally two
carry
out
the
al uk kk
investigation.
have
©) Input Praeriicameter
®
Op. Awp. Unit OAISOA
Fig 3.5.1
58
(alla ec at a ft a Mat
Simple
nn el eu el ede bee
Modular Servo
Scanned
by CamScanner
Scanned by
Modular Servo
Glinple
Poaltion Control System
PRAGCTIGAL
Manual
Control
Assignment
5
6.4
Posttion
System
Sel the feedback selector switch on the OA150A to the 100kQ
resistor,
Set the rotary potentiometers to zero and zero
operational amplifier output, using the voltmeter.
set the
Initially one student should slowly turn the knob on the input
potentiometer and set it at any value in the ranges 0 to -15V
and 0 to 415V.
Let the other student watch the voltmeter connected to the
output Vo and by turning the shaft of the other
potentlometer return the voltmeter reading to zero.
rotary
After setting the input cursor to various positions, each time
first returning to zero, try seeing if the student operating the
output potentiometer can manage to keep the needle of the
voltmeter at zero if the position of the input is slowly and
continuously varied.
Finally, try suddenly changing the position of the input cursor,
whilst attempting to keep the error at zero.
Question
5.1
Write down
the needle,
zero point.
your observations on what
for the different inputs, as
happened
it neared
to
its
You will, no doubt have noticed that it was quite easy to get the
voltmeter to register zero for a slow movement but when the
movement was fast (step input), the correcting action needed
to bring the needle to zero could not occur immediately
because of over-compensation or what is known as overshoot.
Now if we analyse our experiment we can see that the position
of the input potentiometer slider gives us a reference voltage
and that the position of the output potentiometer slider is used
to feed back an inverted signal that is summed and compared
in the operational amplifier to form our error signal Vo, which
will then give a reading on the voltmeter.
In this system muscle power is the Controller with finger
movement being used as the Actuator. There is even a stage
of pre-amplification in which our eye observes the meter
reading and signals the brain to send a message along the
nerve fibres to the muscles in our arm and hand.
=
Scanned
by CamScanner
Scanned by
CamScanner
Modular Servo
reference
{ transducer
+
3
3
comparator
(eyes)
—
pre-amplifier
(input
:
: potentiometer) }
oeneacacncsecnst
5
Assignment
System
Control
Position
|
actuator
controller
(brain)
(muscles)
(fingers)
transducer
(output
jg $<
potentiometer)
Fig 3.5.2
Because in fig 3.5.2 information is fed back for comparison
with a reference signal, the system is a closed loop one.
We
are
now
going to show
how the motor can
be used
make a simple automatic positional control system. As a
to
first
step we shall simply cause the motor, through a gear box, to
drive the shaft on the output
position.
What
sort
of
automatic
control
system
would
As there is no electrical feedback signal to form
signal, the system is an open loop one.
an
this
error
be?
PTT
5.2
anapnpp?
Question
potentiometer to a required
IEeeee)
Simple
60
Scanned
by CamScanner
Scanned by
Modular Servo
Simple
Position
Control
System
Assignment
5
6
tT
8
YY
Pi Feedback
DCMI150F
LE
ren
/
owe
deM
|
/
i
Reduction Gear Tacho Unit
/
O_))
w
1
Oo
ov
a
1
Jum
@a Sow
Fl input Potentiometers
eet | El ouput Potentiometer
PASAT
°
OPIS
Fig 3.5.3
62
Scanned
by CamScanner
Scanned by
a
Modular Servo
Simple Position Control System
PRACTICAL
5.2
Assignment 5
Attach the AU150B, SA150D and DCM150F to the Baseplate
by means of the magnetic fixings.
Fix the plug from the Servo Amplifier into the Power Supply.
Fix the plug from the Motor Unit into the Servo Amplifier.
Attach the GT150X to the baseplate by means of the magnetic
fixing and position it so that it is connected to the motor shaft
by means of the flexible coupling.
Set up as in fig 3.5.3
A simple
open-loop
Control
motor-driven
Position
System
Use the push-on
coupling to link a low-speed
GT150X to the output potentiometer shaft.
Starting
with
AU150B
the
potentiometer
knob
shaft of the
at the
fully
counter-clockwise position gradually turn it till the motor just
rotates and record:
Scale position at which the
motor just rotates
(1)
Direction in which the output
rotary potentiometer moves
(2)
Return the output rotary potentiometer cursor to zero by turning
the GT150X high-speed shaft.
Decide on a position in the direction (2), you wish the
potentiometer shaft to turn to and then turn the AU150B
potentiometer knob to position (1). As the cursor nears the
required angle, reduce this input signal so that the cursor
comes to rest nearly at the required point.
Repeat using increasingly large input signals instead of value
(1).
Question
5.3
What happens as you try to get
rest at the required angle?
the
cursor
to
come
to
The system is limited in that the motor drive was unidirectional;
let us see if we can control the direction of rotation of the motor
by, say, reconnecting Terminal
connection of the power supply.
Question
5.4
1 on the AU150B
to a -15V
What result did you get on changing from a positive
to a positive and negative supply and trying to drive
the
motor?
63
Scanned
by CamScanner
Scanned by
Control
System
Assignment
5
As Terminal 3 is at +15V and Terminal 1 at -15V then
positions 0 to 5 will give you decreasing positive voltages and
5 to 10 increasing negative voltages.
Now let us look at the mimic on the Servo Amplifier, fig 3.5.4.
Inputs 1 and 2 are connected to a pair of transistors which are
part of a circuit arrangement known as a ‘long tailed pair’. The
emitter currents of each transistor are added together and the
total current is held at a fixed value by a constant current
source which is represented on the mimic diagram by the
resistor to -15 volts. When both inputs are at the same voltage,
the current in each transistor will be equal and so the output
voltage (measured at the collector of each transistor) are the
same. This means that no current flows through the motor.
SA150D
Feedback
+24V
control
voltage
ree
9s
monitor
control
ov
+15V
-15V
OV
current
monitor
-15V
Servo Amplifier
Fig 3.5.4
7
Position
rpreprrrrrrprrr
Simple
8 FPF HHASAAASAAAAKRSHA
Modular Servo
Now if the voltage at Input 1 is raised, then the current through
transistor 1 increases (and so the voltage at its collector falls).
But, since the sum of the emitter currents is fixed this means
that the current in the other transistor must reduce (and so the
voltage at its collector increases).
64
So we
get a voltage
Scanned
by CamScanner
Scanned by
Simple
Position
Control
Assignment
System
5
a
la
eh
Modular Servo
amplifiers to provide a high current drive for the motor
armature.
Similar reasoning applies if we have the voltage at Input 1
lower than Input 2 except that the output voltage across the
motor is reversed and so it rotates in the other direction.
To summarise; the circuit arrangement provides two ways to
drive the motor as shown in fig 3.5.5.
*
+
*
armature
Vi, i vi
Vin [ V2
-
OV
Fig 3.5.5
(
|
Luu
( ,ueUDECDROXDDBY
difference across the collectors which is then input to power
Dual input in which speed in each direction is determined by
which of the two inputs, Vi or Vo, is the greater. The motor is
stationary when Vy = Vo.
Any voltage which is common to both inputs will not result in
any motor current and this is often an advantage, for instance,
in industrial systems where there may be noise or interference
affecting the signal wires to a power amplifier.
In later assignments the necessary input signals are provided
by a specialised
Inputs 1 and 2.
Pre-Amplifier Unit which
is connected to
“aT yO
‘ae
»
wh
ib
18
“wb
ib
a
tb
a
ib
ip
ib
{
S| bu
Single input in which direction and speed are controlled by
varying either V4 or Vo.
65
Scanned
by CamScanner
Scanned by
Modular Servo
Simple
Position
PRACTICAL
ASPECTS
Control
Assignment
System
5
Let us draw together the threads of understanding that we
have gained from this assignment.
We started by setting up a control system that produced an
error which we visually had to interpret before making a
manual correction to the system output. It was seen that the
delay between the change in state i.e a step input and action
to follow could cause over-compensation or ‘overshoot’.
We then started to mechanise the system by attaching a
geared motor to the output rotary potentiometer but found that
the control was difficult because visual interpretation was
needed to determine when the motor should be stopped.
In the following assignment we will deal with three points. The
use of a special amplifier, the Pre-Amplifier that can output
forward or reverse drive signals depending on whether it
receives a positive or negative input. Using the error signal as
an input into the Pre-Amplifer, with its magnitude used to
determine the amount of motor drive and its polarity as to the
direction of rotation. However, the last item of overshoot can
be a more difficult problem to deal with and later assignments
will spend some considerable time on some of the methods
available to deal with the problem.
66
Scanned
by CamScanner
Scanned by
TYPICAL RESULTS AND ANSWERS
ASSIGNMENT 5
~F
i
y
eo ee
Modular Servo
=
Question 5.1
You will find that for a fixed position of the input dial the meter
can be set to zero quite rapidly and accurately.
For a steady rotation of the input it will be difficult to hold the
Pn
meter exactly at zero.
os
==
er
For sudden dial movements the meter can be brought to zero
but only after a large initial error and possibly several
overshoots.
wo
This will be an open-loop control system.
=a
| -
‘
Question
5.2
=
.
|
=~
Question 5.3
‘
Question 5.4
The output dial will usually overshoot the desired position but,
if reactions are fast, it could fall short of it and then be ‘inched
On’ to the desired position.
The output dial can now be brought
to a desired position by
g
rotating in either direction although this is difficult to do
manually.
=
=
i>
i
——?
—_
=
—
|
2
a)
2
2
2
@
@
67
Scanned
by CamScanner
Scanned by
CLOSED-LOOP
POSITION
SYSTEMS
CONTROL
ASSIGNMENT
6
The use of a servo motor in an automatic position control
system is investigated.
EQUIPMENT
REQUIRED
Qty
Designation
Description
1
OA150A
Op Amp Unit
AU150B
Attenuator Unit
PA150C
Pre-Amp Unit
SA150D
Servo Amplifier
PS150E
Power Supply
DCM150F
DC Motor
IP150H
Input Potentiometer
OP150K
Output Potentiometer
GT150X
Reduction Gear Tacho Unit
3
CONTENT
fF § RKCKAERKAAAAAA
SS § 8 SF _§_8.
Pe Pr_. RP PRPPS
Modular Servo
DC Voltmeter 30-0-30V
(or voltmeter in GT150X)
m
Attach the AU150A, PA150C and PS150E to the Baseplate
™
Connect the Power Supply to the mains supply line. DO
NOT switch on yet.
Pf
} aS
by means of the magnetic fixings.
68
i
PRELIMINARY
PROCEDURE
Scanned
by CamScanner
Scanned by
Modular Servo
CLOSED-LOOP
OBJECTIVE
POSITION
SYSTEMS
ASSIGNMENT
6
When you have completed this assignment you will:
M™
M@
KNOWLEDGE
LEVEL
ConTROL
Have established the operating characteristic of the
Pre-Amplifier
Have observed the action of a simple motor driven
closed-loop position control system
Before starting this assignment you should:
mM
Be familiar with the components of the DC Modular Servo
and preferably have completed Assignment 1,
Familiarisation.
m@
Understand the operation of electronic amplifiers.
mM
Understand the operation of a simple position control
system.
69
Scanned
by CamScanner
Scanned by
sdular Garvo
Closed-Loop
Position
Control
Assignment
Systems
6
Set up as in fig 3.6.1 and switch on power,
@
Aterandor Unit AUISB
@
Preamplifier Unld PAIS
Switch In ‘normal position
@
Power Supply '
J
Fig 3.6.1
In this assignment we will look at the Pre-Amplifier, PA150C,
which has two signal inputs and two outputs. If there is a
positive voltage on either of its inputs then one of its outputs
INTRODUCTION
becomes positive; whilst if one of its outputs becomes negative
then the other output becomes positive.
Before we use the PA150C to control the motor, we will carry
out a practical to find its characteristics.
PRACTICAL
6.1
Characteristics
the
of
Pre-Amplifier
PA150C
On the upper potentiometer of AU150B,
using the voltmeter,
set the output between terminal 2 and OV to +1V.
To be able to obtain accurate readings we need a fine control
and so we are going to use the lower potentiometer to give us
fractions of the one volt that we have selected.
Connect terminal 6 of the lower potentiometer to terminal 2 of
the upper potentiometer. This means that the scale positions 1
to 10 give us input values in tenths of a volt.
We are now in a position to measure output values of the
PA150C for different values of inputs to see how the amplifier
behaves.
70
Scanned
by CamScanner
Scanned by
Madular Sorva
Closed-Loop
a
ST
Poston
TSR
Control
RTS RTS Ee Ral ence
Systems
Assignment
6
=
For each scale position on the lower potentiometer take
readings with the valtmeter of each of the PA150C outputs win
respect to OV as In tig 3.6.2. After you have done this repeat for
the differant outputs with the voltmeter across both outputs.
Record your results In your own copy of fig 3.6.2
Now connect tarminal 3 of the upper potentiometer to the -15V
Supply and repeat your readings.
Input signal
Pre-amplitier output
Vi volts
Vo (3)
Vo (4)
Vo (4-3)
Fig 3.6.2
Exercise
6.1
Plot
as
on
graphs
of
in fig 3.6.3
how
amplifier
you
the
and
have
outputs.
input
fig
volts
3.6.4.
connected
against
The
the
the
curves
voltmeter
output
will
volts
depend
across
the
71
Scanned
by CamScanner
Scanned by
CamScanner
Systems
Control
Assignment
A
15
pre-amplifier output V (4)
\
>
e| |
|
2
>
\
3
2
\Lat
3
/
HAA BAAR
pre-amplifier output V 9(3)
{10
‘a.
\Let I
E
o
Q
40.4
40.30
402
«40.1
Qo
0.1
02
pre-amplifier input volts V j
Fig 3.6.3
03
04
O05
-06
fe
205
nner
+0.6
6
PP RHF HH
Position
annannaen
Closed-Loop
SSA SAADA.
Modular Servo
72
Scanned
by CamScanner
Scanned by
CamScanner
Modular Servo
Position
Closed-Loop
>
_
|-08 Y
2
|-o6
$
|
2
\
16
s
-0.4
E
-0.2
3
PS
“12
NY
6
Assignment
Systems
Control
8
Qa.
-8
a
0
voltage across pre-amplitier
+4
+8
+12
outputs V,6(4-3)
+0,2
>
«+16
V
N.
40.4
»
+0.6
}
+0.8
Fig 3.6.4
The ratio of the output voltage V, to the input voltage V; gives
the gain K.
Exercise
6.2
Question
6.1
State
why
you
should
measure
straight part of the curve.
Question
6.2
Explain
Question
6.3
State the range of
should be kept to.
Question
6.4
What input
outputs?
Using
the
the
straight
Pre-Amplifier.
curves.
the
reasons
value
part
for
of the
the
signals
will
give
curves
find
the
non-linear
that
a
you
nil
the
gain
gain
on
portions
think
voltage
the
of
the
of
the
inputs
across
the
If the answer to this is not zero it is because there is a
zero
offset in PA150C. This can be eliminated using the ‘zero set'
control.
73
Scanned
by CamScanner
Scanned by
Closed-Loop
Position
PRACTICAL
6.2
A simple Motor Driven
Closed-loop Position
Control System
Control
Assignment
Systems
6
Retain the units of the first practical and also attach the
OA150A, DCM150F and IP150H and OP150K
Baseplate by means of the magnetic fixings.
to the
Connect the Servo Amplifier connector plug into the Power
Supply.
Connect the
Amplifier.
Motor
Unit
connector
plug
into the
Servo
We are now in a position to use the outputs of the PC150C to
control the motor rotation and provide to it an error signal from
the OA150A
Set up as in fig 3.6.5.
74
AAN.
RePe
AARAAA
RRPR
SF ATAAAA
PePprrrrrPrr
Modular Servo
Scanned
by CamScanner
Scanned by
Closed-Loop
Position
Assignment
Contro} Systems
6
ea et
{ia
» » »
vb
bebo
1 Ecce | Grace 1 ead)
as
bw
ed Rema
bw
eet
a
a
a aad wa ve
ee
TUT
Ob
7%
i
ée¢¢ed
Modular Seno
Ons pad Avomdum eer
OP1SeK
Fig 3.6.5
75
Scanned
by CamScanner
Scanned by
bs
Modular Servo
Closed-Loop
Position
Control
This time
Assignment
Systems
we
shall utilise the
error signal
output
6
V, of the
operational amplifier to drive the output potentiometer via the
pre-amplifier and motor.
The upper potentiometer on the AU150B can now be used as
a gain control and should initially be set to zero before
switching on the power. Adjust the PA150C ‘zero set' so that
the motor does not rotate.
Now set the IP150H to some arbitrary angle and increase the
gain control setting. The output potentiometer cursor should
rotate to an angle nearly equal to that of the input potentiometer cursor .
If the output cursor stops before arriving at the set position, one
is faced with the fact that the system is tolerant to an error and
the motor will not respond till the error exceeds a certain value.
In the next assignment we shall study this effect, which is know
as 'deadband'. For the purpose of this practical, increase the
gain so that this tolerance is overcome and you get the correct
alignment.
Exercise
6.3
Note the different results obtained in your copy of
fig 3.6.6 for several settings of the input shaft angle.
Output cursor position in degrees
Required
PRACTICAL
ASPECTS
Actual
Misalignment
Fig 3.6.6
In a position control system it is of great importance that there
should be a smooth stop at any required position. If there is an
overshoot then there must be a reverse movement to
compensate. If movement is rapid where the system gain is
high, it becomes very difficult to get smooth, accurate arrest.
Indeed, the correcting movement might also produce an
overshoot that will again need correction and in an extreme
case a system could be moving to and fro across a required
position in a state of instability.
So far we have dealt with motors in the unloaded state. The
Speed/Torque characteristics of a motor may not produce a
suitable response under load. To overcome this problem
gearboxes are very often used. However, they then introduce
the further problem of free play in the gears or backlash.
76
Scanned
by CamScanner
Scanned by