DESIGN OF ELECTRICAL MACHINES
TABLE OF CONTENTS
NO
I
TITLE
SYLLABUS
QUESTION BANK
CLASS WORK PROBLEMS
TWO MARKS
UNIT – I – INTRODUCTION
1.1 Design
1.2 Engineering Design
1.3 Considerations To Evolve A Good Design
1.4 Design Factors
1.4.2 Electromagnetic Fields
1.4.1 Electrostatic Fields
1.5 The Basic Structure Of An Electromagnetic
Rotating Electrical Machine
1.6 Limitations In Design
1.7 Constructional Details Of Machines
1.8 Specification Of Machines
1.8.1 Specification
1.8.2 The Standard Specifications Issued For
Electrical Machines,
1.8.3 Indian Standard Specifications Numbers
Along With Year.
1.9 Recend Trends In Design
1.10 Basic Principles
1.10.1 Faraday’s Law Of Electromagnetic
Induction
1.10.2 The Change In Flux Linkages Can Be
Caused In Three Ways
1.10.3 Biot-Savart’s Law
1.10.4 Force Between Current Carrying
Conductor
1.11 General Design Procedure
1.11.1 Main Dimension Of The Rotating
Machines
PAGE
1
1
1
1
2
4
6
8
9
11
14
1.12.Properties Of Materials Used In Electrical
Machines
1.12.1 Properties Of High Conductivity
1.12.2 Properties Of Copper
1.12.3properties Of Annealed Copper
1.12.4 Magnetic Materials
1.12.5 Soft Magnetic Materials
1.12.6 Hard Magnetic Materials
1.12.7 Electrical Properties Of Insulating
Materials
1.12.8 Applications Of Insulating Materials
1.13 Recent Trend In Design
1.13.1 Advantages Of Use Of A Digital
Computer
1.13.2 Computer Aided Design ( Cad)
1.13.2.1 Analysis Method
1.13.2.2 Synthesis Method
1.13.2.3 Hybrid Method
1.13.3 The Method Of Design Optimization
Using Computers
1.13.4 Flow Diagram For Analysis Method Of
Design.
1.13.6 Flow Diagram For Synthesis Method Of
Design.
1.13.5 Advantages Of Analysis Method
1.14 Basic Principles Of Magnetic Circuits
1.15 Difference Between Electric And Magnetic
Circuits
I
16
22
26
29
1.16 Similarities In Electric And Magnetic Circuit
30
1.17 Magnetization Curves
1.18 Reluctance Of The Airgap In Machines With
Smooth Aramture
1.18.1 Reluctance Of Airgap In Machines With
Open Armature Slot
1.18.2 Case (I) Reluctance Of Airgap Neglecting
Fringing Effect
1.18.3 Case (I) Reluctance Of Airgap Including
The Effect Of Fringing
1.18.4 The Gap Contraction Factor For Slots
1.18.5 Estimation Of Carter’s Gap Co-Efficient
For Slots
30
32
1.19 Effects Of Ventilating Ducts On Reluctance Of
Airgap
1.19.1 Gap Contraction Factor For Ducts (Kgd)
1.19.2 Total Gap Contraction Factor
1.20 Gap Contraction Factor For Induction Motor
1.20.1 Stator Slot Opening
1.20.2 Rotor Slot Pitch
1.21 Mmf For Airgap
1.21.1 Mmf For Airgap In Rotating Machines
1.21.2 Mmf Of Air Gap In Machines With Smooth
Armature.
1.22 Mmf For Teeth
1.22.1 Methods
1.22.1 .1 Graphical Method
1.22.1 .2 Three Ordinate Method (Simpson’s Rule)
1.22.1 .3 Bt1/3 Method
1.21.3 Mmf Of Air Gap In Machines With Open
Armature Slot And Radial Ventilating Ducts
1.21.4 Effect Of Salient On The Mmf For Airgap
1.23 Real And Apparent Flux Density
1.24 Magnetic Leakage
II
36
38
39
41
42
1.24.1 The Leakage Flux Affects The Following
Performance Of Various Machines
1.25 Slot Leakage Reactance (Reactive Voltage)
43
1.26 Unbalanced Magnetic Pull
45
1.27 Magnetic Loading
47
1.28 Electric Loading
1.28.1 Specific Magnetic And Electric Loading
48
1.29 Output Equation
48
PROBLEMS
48
UNIT II
DC MACHINES
2.1 Constructional Elements
66
2.2 Output Equation
67
2.3 Alternative Expression For Power Developed In
Armature
68
2.4 Separation Of D And L For Dc Machines
69
44
2.5 Choice Of Armature Diameter
II
2.6 Choice Of Specific Loading
2.7 Choice Of Specific Electric Loading
2.8 Selection Of No. Of Poles
2.8.1 Advantages Of Large Number Of Poles
2.8.2 Disadvantages Of Large Number Of Poles
2.8.3 Guiding Factor / Condition Factor For
Choice
Of Number Of Poles
2.9 Length Of Airgap
IV
72
73
75
78
PROBLEMS
79
2.10 Area of cross section of armature conductor
84
2.11 Design of commutator and brushes
85
2.12 Efficiency and losses
86
UNIT III
TRANSFORMER
3.1 Constructional Details
3.2 Output Equation Of Single Phase Transformer
3.3 Output Equation Of Three Phase Transformer
III
71
100
100
103
3.4 Emf Per Turn
3.5 Design Of Cores
3.5.1 Two Stepped Core / Cruciform Core
3.5.2 Ratio Of Area Of Core And Circumscribing
Circle
3.6 Choice Of Flux Density In The Core
3.7 Over All Dimension Of The Transformer
3.8 Design Of Windings
3.9 Cooling Of Transformers
3.9.1 Methods Of Cooling Transformer Are
3.9.2 T/F Oil As A Cooling Medium
3.9.3 Temperature Rise In Plain Walled Tanks
3.10 Design Of Tank With Cooling Tubes
105
3.11 Dimensions Of Tank
3.12 Estimation Of No Load Current Of Transformer
3.13 No Load Current Of Three Phase Transformer
115
PROBLEMS
118
UNIT - IV
105
108
109
111
112
114
128
130
INDUCTION MOTORS
4.1 Constructional Details
4.2 Separation Of D And L For Induction Motors
4.3 Choice Of Specific Loadings
132
4.4 Choice Of Specific Electric Loading
134
4.5 Choice Of Specific Magnetic Loading
134
4.6 Main Dimension
134
4.7 Stator Winding
135
4.8 Length Of Mean Turn
135
4.9 Stator Conductors
135
4.10 Stator Core
136
4.11 Choice Of Stator Slot
137
4.12 Area Of Stator Slot
138
4.13 Stator Teeth
4.14 Depth Of Stator Core
133
133
138
138
4.15 Length Of Air Gap
139
4.16 Choice Of Rotor Slots
139
4.17 Design Of Squirrel Cage Rotor
140
4.18 Design Of End Rings
141
4.19 Design Of Wound Rotor
141
4.20 Rotor Teeth
142
4.21 Rotor Core
142
4.22 Slip Rings & Brushes
4.23 Output Equation And Output Co-Efficient Of Ac
Machines (Induction Machine)
PROBLEMS
142
142
144
UNIT - IV
INDUCTION MOTORS
V
5.1 Introduction
5.1.1 (I)Salient Pole Machines
5.1.2 (Ii)Cylindrical Rotor Machines
5.2 Output Equation
159
5.3 Design Of Salient Pole Machines
159
159
5.4 Types Of Poles
5.5 Short Circuit Ratio (SCR)
5.5.1 Effect Of SCR On Machine Performance
160
161
5.5.2. Summarizing, High Value Of SCR Leads To
5.6 Choice Of Specific Magnetic Loading
161
5.7 Choice Of Specific Electric Loadings
161
5.8 Number Of Stator Slots
162
5.9 Methods Of Eliminating Harmonics
5.10 Length Of Air Gap
5.10.2 Disadvantage Of Large Air Gap
5.10.1 Advantage Of Large Air Gap Are
5.10.3 Estimation Of Air Gap Using Scr
5.11 Turbo Alternator
162
5.12 Armature Design Of Salient Pole Alternator
166
5.13 Field Design (Salient Poles)
5.14 Design Of Damper Winding
168
PROBLEMS
5.15 Dispersion Coefficient
5.15.1 Higher Value Of Dispersion Co Efficient
171
163
164
170
174
ELECTRICAL MACHINE DESIGN
UNIT I: INTRODUCTION
Principles of electrical machine design - General design considerations Specifications of machines- Limitation in design- Recent trends in design – CAD
– Flow chart methods - Review of properties of materials used in electrical machines
- Magnetic circuit calculations- Introduction
to
Finite
element
method
mathematical formulation - magnetic field calculations.
UNIT II: DC MACHINES
Constructional details- Output equation - Choice of specific electric and magnetic
loadings - Separation of D and L for rotating machines. Estimation of number of
conductors / turns - Coils - armature Slots - Conductor dimension - Slot dimension.
Choice of number of poles - Length of air gap - Design of field system, Interpoles,
Commutator and Brushes.
UNIT III: TRANSFORMERS
Constructional details-Classification – output equation - Core section - Window
dimensions - Yoke dimension - Overall dimension - Determination of number of turns
and length of mean turns of windings- Resistance of windings- Leakage reactance- No
load current calculation – Regulation, losses and efficiency.
UNIT IV: INDUCTION MOTORS
Three phase Induction Motor: Constructional details - Output equation - Choice of
specific loadings - Design of stator, squirrel cage rotor, windings and slots Calculation of circuit parameters - No load current - efficiency and temperature rise
from design data. Single phase Induction Motor: Design of running and starting
windings for capacitor start induction motor.
UNIT V: ALTERNATORS
Constructional details – Output equation – Choice of specific electric and magnetic
loadings- Estimation of D and L – Stator slots- Length of airgap- Conductors/turnStator yoke design-Design of damper windings- Design of field windings- Rotor design
of turbo alternator.
TEXT BOOKS
1. A.K. Sawhney, A.Chakrabarti, "A Course in Electrical Machine Design", Dhanpat
Rai & Company, sixth edition 2006.
2.
V.N. Mittle and A. Mittle, ‘Design of Electrical Machines’, Standard Publications
and Distributors, Delhi, 2002.
3.
S en, S.K, "Principles of E lectric Machine D esign with C omputer
Programmes", Oxford & IBH Publishing Co. Pvt. Ltd., 2001, Reprint 2004.
4. M.V.K. Chari and P.P. Silvester, "Finite Elements in Electric and Magnetic
Field Problems", John Wiley, 1980.
REFERENCE BOOKS
5.
K.G. Upadhyay, ‘Design of Electrical Machines’, New Age nternational
Publishers, 2008.
6.
R.K. Agarwal, "Principles of Electrical Machine Design", S.K.Kataria and Sons,
Delhi, 2002.
7.
Shanmugasundaram, A., Gangadharan G. and Palani R., "Electrical Machine
Design Data Book", New Age international publishers (P) ltd., First edition 17979,
Reprint 2005.
8.
H .M.Rai, "Principles of Electrical Machine Design", Sathya prakashan, Delhi.,
1988
9.
P.P. Silvester and Ferrari, "Finite
Cambridge University Press, 1984.
Element
for
Electrical
Engineers",
10. A.E.Clayton, "Performance and design of Direct Current Machines", The
English Language Book Society and sir Isaac pitman and sons Ltd., London, 1962.
UNIT - I
INTRODUCTION
Basic Principles of Machine Design
Principles of electrical machine design - General design considerations Specifications of machines- Limitation in design- Recent trends in design – CAD
– Flow chart methods - Review of properties of materials used in electrical machines
- Magnetic circuit calculations- Introduction to Finite element method mathematical formulation - magnetic field calculations.
1.1 DESIGN
Design is defined as a creative physical realization of theoretical concepts.
1.2 ENGINEERING DESIGN
Engineering Design is a application of science, technology and invention to produce
machines to perform specified tasks with optimum economy and efficiency.
1.3 Considerations to evolve a good Design
1. Cost
2. Durability
3. Compliance with performance criteria as laid down in specifications.
4. Compliance with the performance specification and consumer requirements.
A good design is one where the machine has reasonable operating life,say between 20
to 30 years and has a low initial cost. This is for motors.
Induction motors used for general purpose applications.
Large synchronous machines and transformers which are used in power system must
be designed with reliability and durability in operation as the major considerations
with less initial cost.
-------------------------------*---------------------------------
1.4 Design Factors
The mechanical force required for movement in Rotating electrical machines can be
produced both by
1. Electrostatic fields
2. Electromagnetic fields
Both the fields stores some energy .
1.4.1 Electrostatic fields
in electrostatic machines, the energy density is limited by the dielectric strength of
the medium used.
For Air dielectric medium the energy density about 40J/m3
1.4.2 Electromagnetic fields
Magnetic effects is used for production of force.
Maximum value of flux density that can be used is about 1.6wb/m2.
The energy density about 1MJ/m3 (in airgap)
Approximately energy density is 25,000
The force produced by electrostatic effects are very weak.
A small current can produce large mechanical force by electromagnetic means
and therefore all the modern electrical machines are electromagnetic type.
------------------*--------------------------
1.5 THE BASIC STRUCTURE
ELECTRICAL MACHINES
It consists of following parts
1.
2.
3.
4.
5.
Magnetic circuits
Electric circuits
Dielectric circuits
Thermal circuits
Mechanical parts
OF
AN
ELECTROMAGNETIC
ROTATING
Magnetic circuits
It provides the path for the magnetic flux and consists of airgap, stator and rotor
teeth and stator and rotor cores (yokes)
Electric circuits
It consists of stator and rotor winding.The winding of a transformer or a rotating
machine conveys electrical energy to or from the working region and is concerned with
production of emf and development of magneto mechanical force.winding are formed
from suitable insulated conductors.
Dielectric circuits
The dielectric circuit consists of insulation required to isolate one conductor from
another and also the windings from the core. The insulating materials are essentially
non-metallic and may be organic or inorganic ,natural or synthetic.
Thermal circuits
The thermal circuits is concerned with mode and media for dissipation of heat
produced inside the machine on account of losses.
Mechanical parts
Fig
(1.5
)
Basic
structure
ofrotating
machines
Main mechanical parts
1. Frame
2. Bearings
3. Shaft
A successful design brings out an economic compromise for space occupied by
iron, copper (aluminum) insulation and coolant (which may be air,hydrogen,water
or oil)
--------------------*--------------------------
1.6 LIMITATIONS IN DESIGN
Saturation
Temperature rise
Insulation
Efficiency
Mechanical parts
Commutation
Power factor
Consumers specifications
Standard specifications
Saturation
Electromagnetic machines use ferromagnetic materials
The maximum allowable flux density to be used is determined by the saturation level
of the ferromagnetic material used.
A high value of flux density results in increased excitation resulting in higher cost for
the field system.
Temperature rise
The most important parts of the machine is insulation.
The operating life of a machine depends upon the types of insulating materials used in
its construction .
The life of s insulating materials in turn depends upon the temperature rise of the
machine.
Proper cooling and ventilation techniques are required to keep the temperature rise
within safe limits.
Insulation
The insulation materials used in a machine should be able to withstand the electrical
,mechanical and thermal stresses which are produced in the machines.
The type of insulation is decided by the maximum operating temperature of the
machine parts where it is put.
And also the size of the insulation is decided by maximum voltage stress and
mechanical stresses produced.
Efficiency
The efficiency of the machine should be as high as possible to reduce the operating
costs.
In order to design a highly efficient machine, the machine and electric loadings used
should be small and this requires the use of large amount of material.
Mechanical parts
The construction of mechanical parts should be as simple as possible and also it is
technologically good.
The design of mechanical part is particularly important in case of high speed
machines.
For example
In turbo alternator ,the rotor slot dimensions are so selected that the mechanical
stresses at the bottom of rotor teeth do not exceed the maximum allowable limit.
In induction motors ,the length of airgap is kept as small as possible in order to have
a high power factor.
The length of airgap and also that of the size of the shaft are mainly decided by the
mechanical considerations.
In large machines,the size of the shaft is decided by considering the critical speed
which depends on the deflection of the shaft.
Commutation
The problem of commutation is important in the case of commutator machines.
Commutation condition limit the maximum output that can be taken from a
machine.
Power factor
Poor power factor results in larger values of current for the same power and therefore
large conductor sizes have to be used.
Power factor problem is particularly important in the case of induction motors.
The size and hence cost of induction motors can be reduced by using a high value of
flux density in the airgap but results in saturation in iron parts of machine and
consequently a poor power factor.
Thus the value of flux density depends upon the power factor.
Consumer’s specifications
The specifications as laid down in the consumer’s order have to be met and the design
evolved should be such that it satisfied all the specifications and also the economic
constraints imposed on the manufacturer.
Standard specifications
This specifications are the biggest strain on the design because both the manufacturer
as well as the consumer cannot get away from them without satisfying them.
-------------------------------*-----------------------------
1.7 CONSTRUCTIONAL DETAILS OF MACHINES
Electrical machines design involves application of science and technology to produce
cost effective, durable, quality and efficient machines.
The machines should be designed as per standard specifications.
Electrical machines classifications
1. Static (stationary) machines
Transformer (converts electrical energy from one voltage level to another
voltage level.
2. Dynamic machines
a. Motors
b. Generators
Rotating machines converts electrical energy to mechanical energy or
viceversa.
This above said conversions in any electrical machine takesplace through magnetic
field.
Required magnetic field produced by an electromagnetic which requires core and
winding.
The basic principle of operation of all electrical machine is governed by faraday’s law of
electromagnetic induction.
Constructional Elements Of Transformer
1.
2.
3.
4.
IRON CORE
PRIMARY AND SECONDARY WINDING
TRANSFORMER TANK
COOLING TUBES
Constructional Elements Of Rotating Machines
1. STATOR
2. ROTOR
3. Others.
DC machine
Stator
a. Yoke
b. Field pole
c. Pole shoe
d. Field winding
e. Inter pole
Rotor
a. Armature core
b. Armature winding
c. Commutator.
d.
Others
a. Brush
b. Brush holder
Squirrel cage induction motor
Stator
a. Frame
b. Stator core
c. Stator winding
Rotor
a. Rotor core
b. Rotor bars
c. End rings
Classification of design problems
•
1. Electromagnetic Design
•
2. Mechanical Design
•
3. Thermal Design
•
4. Dielectric Design
--------------------*-------------------------------
1.8 SPECIFICATION OF MACHINES
1.8.1 SPECIFICATION
The specification are guidelines for the manufacturers to produce economic products
without compromising quality.
The quality of the certified products will be periodically monitored by the standard
organization.
1.8.2 The standard specifications issued for electrical machines,
1. Standard ratings of machines
2. Types of enclosure
3. Standard dimensions of conductors to be used
4. Method of marking ratings and name plate details.
5. Performance specifications to be used
6. Types of insulation and permissible temperature rise
7. Permissible losses and range of efficiency
8. Procedure for testing of machine parts and machines
9. Auxiliary equipments to be provided
10.Cooling methods to be adopted
in India ,the Indian standards organization (ISO) has laid down their specification(ISI)
for various products.
Recently they have released revised standard ISO 9002.
The name plate of the rotating machine has to bear the following details as per ISI
specifications.
1. KW or KVA rating of machine
2.
3.
4.
5.
6.
7.
8.
Rated working voltage
Operating speed
Full load current
Class of insulation
Frame size
Manufacturers name
Serial number of the product.
1.8.3 INDIAN STANDARD SPECIFICATIONS NUMBERS ALONG WITH YEAR.
Standard specification of induction motor
IS 325 – 1966
: Specifications for three phase induction motor.
IS 1231 – 1974
: specifications for foot mounted induction motor
IS 4029 – 1967
: Guide for testing three phase induction motors
IS 12615 – 1986
: specifications for energy efficient induction motor
IS 13555 – 1993
: Guide for selection and application of three phase induction
Motor for different types of driven equipment.
Standard specification of Transformer
IS 1180 – 1989
: Specifications for outdoor 3 phase distribution transformer upto
100KVA
IS 2026 – 1994
: Specification of power transformer
IS 11171 – 1985
: Dry type power transformer
IS 10561 – 1983
: Application guide for power transformer
IS 13956 -1994
: Testing transformers
IS 1885 – 1993
: Specification for electric and magnetic circuits
IS 996 – 1979
: Specifications for single phase AC and universal motor.
----------------------------------* ------------------------------------------1.9 RECEND TRENDS IN DESIGN
Universally accepted classification of electrical machines based upon constructional
features and power outputs exists are
1. Small size machines
2. Medium size machines
3. Large size machines
4. Larger size machines
Small size machines
Electrical machines having a power outputs upto about 750W may be called small
machines.
Medium size machines
Electrical machines having power outputs ranging from a few kilowatt upto
approximately 250KW may be classified as medium size machines.
Large size machines
Electrical machines with power outputs in the range of 250KW upto about 5000KW
are classified as large size machines.
The machines are usually designed and manufactured as a series and have a definite
power output range.
Larger size machines
These machines are manufactured on special orders from customer to meet their
specific demands.
Therefore ,large machines are designed on individual basis .
The power outputs of these machines may be as high as hundreds of megawatts.
The process of design of a single machine may be divided into three major design
problems.
Classification of design problems
1.
2.
3.
4.
Electromagnetic design
Mechanical design
Thermal design
Dielectric design
The aspect of modern day design of electrical machines is designing a number of
machines,all of which form part of a single system.
For example
Generators ,motors and transformer form a part of an electromechanical energy
network.
The different machines of such a system are inter connected and react upon each
other ,sometimes considerably and on occasions disasteroulsy.
Therefore the machines for such a system cannot be designed in isolation and the
designs of all the machines have to be complete concurrently since the design of ine
machine depends upon that of the others.
The problem thus is that of optimization of the system.
To design a series of machines having different ratings to fit into a single frame size.
In this case ,the finished designs of machines must be produced in groups ,where all
designs with in a group are independent.
The evolution of design to meet the specified optimum criteria is a matter of long and
tedious iterations and this fact has led to the applications of fast digital computers to
the design of electrical machines and transformers.
The digital computers has completely revolutionalized the field of electrical machine
deisgn.
The computer aided design has the advantages of eliminating tedious and time
consuming hand calculations thereby releasing the designer from numerical.
---------------------------* ----------------------------------
1.10 BASIC PRINCIPLES
The action of electromagnetic machines can be related to three basic principles which
are,
1. Induction
2. Interaction
3. Alignment
1.10.1 Faraday’s law of electromagnetic induction
This law states that emf induced in a closed electric circuit is equal to the rate of
change of flux linkages.
Flux linkages Ψ = NФ
N – the number of turns in a coil
Ф – flux linking
But flux Ф does not link with all the turns or alternatively all the turns do not link
with the same link.
Total flux linkages
Ψ =N1Ф1+N2Ф2+………………..NnФn
Nk=The number of turns which link with flux ФK
In this case there is a change in the value of the flux linkages of the coil,an induced
emf is produced is given by,
e=
(volt)
(-) sign indicates that the direction of the induced emf.
1.10.2 The change in flux linkages can be caused in three ways
1. The coil is stationary with respect to flux and the flux varies in magnitude with
respect to time.
2. The flux is constant with respect to time and is stationary and the coil moves
through it.
3. Both the changes mentioned above occur together (ie)the coil moves through a
time varying field.
Method I
Where the coil is stationary and the flux is time varying an emf called transformer
or pulsational emf is produced.
There is no energy conversion takes place is energy transference.
This principles used in transformers.
Method II
The flux cutting rule can be employed to illustrate the emf generated in a
conductor moving in a constant stationary field.
The emf generated in d conductor of length moving at right angles to a uniform
,stationary,time invarying magnetic field.
e=- Blv (volt)
where
B – flux density ,wb/m2(T)
l=length of conductor ,(m)
v- linear velocity of conductors (m/s)
the generated emf in this case is called a “motioned emf”.
Emf generated due to motion of conductor ,since motion is involved in the
production of this emf,the process involves electromechanical energy conversion.
This principles is utilize in rotating machines like DC ,induction
machines,synchronous machines.
Method III
A conductor or coil is moving across a stationary time varying magnetic field
(flux)and therefore both transformer as well as motional emf are produced in the
conductor or coil.
This process involves both transformer and energy conversion.
This principles is utilized in the commutator machines.
1.10.3 Biot-Savart’s Law
This law gives the value of force produced on account of interaction between a
magnetic field and a current carrying conductor
Fe=Blisin newton
B
l
i
– Flux density, wb/m2 (T)
- length of conductor,m
- current carried by conductor,A
– Angle between the direction of current and the direction of magnetic field
The direction of force produced is perpendicular to both current and magnetic field.
Conductor and magnetic field are perpendicular to each other and thus =
90˚,sin90̊˚= 1
fe=Bli newton
1.10.4 Force between current carrying conductor
Flux density
B= μH
B=μ
Electromagnetic force
F = BI2l
F=μ
F=
I2l
I1I2 newton
------------------------------* --------------------------------------1.11 GENERAL DESIGN PROCEDURE
In general electrical machines having two windings
Two winding
Transformer
DC machines
Induction machine
&
Synchronous machines
Primary
Winding
secondary
winding
Armature winding
stator
Winding
Rotor
Winding
Field winding
The general design procedure is to relate the main dimensions of the machines to its
rated power outputs.
An electrical machine is designed to deliver a certain amount of power called rated
power.
Rated power is the maximum power that can be delivered by the machine safety.
In DC machines the power rating is expressed in KW
In AC machines the power rating is expressed in KVA
In case of motor the output power is expressed in HP
Active part
In electrical machines the core and winding of the machine are together called active
part.
Because the energy conversion takes place only in the part active part of the
machines.
For all the machines the general output equation can be developed for DC machines
which relates the power output to volume of active part (D2L),speed, magnetic and
electric loading.
Similarly a general output equation can be developed for AC machine which relates
KVA rating to volume of the active part (D2L), speed, magnetic and electric loading.
1.11.1 MAIN DIMENSION OF THE ROTATING MACHINES
In rotating machines the active part is cylindrical in shape.
The volume of the cylindrical is given by the product of area of cross-section and
length (AxL)
D – Diameter of the cylinder
L – Length of the cylinder
Then volume of cylinder =
Fig (1.11.1) Main Dimensions of Rotating Machines
In DC machines
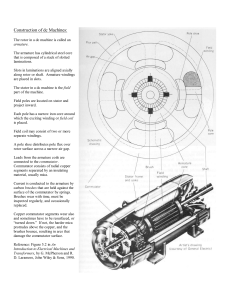
Fig (1.11.1 ) Construction of DC machine
D – Diameter of the armature
L – Length of the armature
In AC machines
D – Inner diameter of stator
L – The length of stator core
Dr – Diameter of Rotor
lg-Length of airgap
--------------------*-----------------------
1.12.PROPERTIES OF MATERIALS USED IN ELECTRICAL MACHINES
Electrical conducting materials
1. High conductivity materials
2. High resistivity materials (Alloys)
High conductivity materials
This type of materials used for making all types of windings required in electrical
machines,apparatus and devices.
Also used for transmission and distribution of electric energy.
This materials having least (resistance) resistivity.
High resistivity materials (Alloys)
This type of materials used for making resistance and heating devices.
1.12.1 Properties of high conductivity
1. Highest possible conductivity (least resistivity)
2. Least possible temperature coefficient of resistance
3. Adequate mechanical strength in particular,high tensile strength and
elongation characteristizing to a certain degree of the flexibility .ie absence of
brittleness .
4. Rollability and drawability which is important in the manufacture of wire of
small and intricate sections.
5. Good welability and solderability which ensure high reliability and low electrical
resistance of the joints.
6. Adequate resistance to corrosion.
Materials
1. Copper
2. Aluminum
3. Iron and steel
4. Alloys of copper
Copper
Copper is the most widely used electrical conductor.
1.12.2 Properties of copper
1. High electrical conductivity with excellent mechanical properties.
2. Relative immunity from oxidation and corrosion under service condition.
3. It is highly malleable and ductile metals.
1.12.3Properties of Annealed copper
1.Density ,kg /m3 – 8900
2.Melting point, ˚C – 1083
3.Thermal conductivity , W / m ˚C – 350
4. Resistivity , Ωm – 0.01724x10-6
5.Specific strength ,MN/m2 – 220 - 250
Aluminum
Aluminum is joining ever increasing applications for a number of economic and
engineering reasons.
The high demand for conductor materials which cannot be met by copper production
alone.
Therefore ,aluminum which is the conductor materials next to copper id used.
Pure aluminum is softer than copper,therefore can be rolled into thin sheets (foils)
Table Comparison of Aluminum and copper wires
Item
Cost
Cross section
Diameter
Volume
weight
Breaking strength
Copper
1
1
1
1
1
1
Aluminum
0.49xPe / Pa
1.62
1.27
2.04
0.49
0.64
Where
Pc – unit price by weight of copper
Pe – unit price by weight of Aluminum
Iron and Steel
Steel alloyed with chromium and aluminum is used for making starters,Rheostats
where lightness combined with robustness and good heat dissipation are important
considerations.
Cast iron is used in the manufacture of resistance grids to be used in the starters of
large motors.
Alloys of copper
1. Bronze (cadmium ,beryllium)
2. Brass
3. Copper silver alloys
High resistivity materials
Conductors of high resistance are used where it is actually desired to dissipates
electrical energy as heat.
ie In starting and regulating devices for motors
1. Nickel – standard resistance and resistance boxes
2. Silver - rheostats
3. Iron - making high temperature elements for electric furnaces heating devices
and loading Rheostats.
Electrical carbon materials
Electrical carbon materials are manufactured from graphite and other forms of carbon
coal.
Used for making brushes for electrical machines.
1.12.4 Magnetic materials
1. Ferromagnetic materials
2. Paramagnetic materials
3. Diamagnetic materials
Types of magnetic materials
1. Soft magnetic materials
2. Hard magnetic materials
1.12.5 Soft magnetic materials
The hysteresis loss depends upon the area of hysteresis loop.
For this reason, magnetic cores used in alternating magnetic fields are made from
materials whose hysteresis loop are more or less narrow.
Fig (1.12.5) Soft magnetic materials
Soft magnetic materials are used in the manufacture of
1.
2.
3.
4.
Electrical machines
Transformers
Electrical apparatus
Instruments and devices
1.12.6 Hard magnetic materials
Fig (1.12.6) Hard magnetic materials
These materials are used in certain types of electrical machines of low power rating
and in all kinds of instruments and devices requiring permanent magnetic which set
up magnetic fields of their own.
Soft magnetic materials
1. Solid core materials
2. Electrical sheet and strip
3. Special purpose alloys
Solid core materials
These materials are normally used for parts of magnetic circuits carrying steady flux
such as cores of DC electromagnets, relays and field frames of DC machines.
Materials used for soft –solid core materials.
1.
2.
3.
4.
5.
Soft iron
Relay steel
Cast steel
Cast iron
Ferro cobalt
Insulating materials
It is essentially
1. Non metallic
2. Organic (or) inorganic
3. Uniform (or) heterogeneous in composition
4. Natural (or) synthetic.
Many of them are natural origin
1.
2.
3.
4.
5.
Paper
Cloth
Paraffin
Wax
Natural resins
In organic insulating materials
1. Glass
2. Ceramics
3. Mica
1.12.7 Electrical properties of insulating materials
An ideal insulating material
1.
2.
3.
4.
5.
High dielectric strength ,sustained at elevated temperatures
High resistivity or specific resistance
Low dielectric hysteresis
Good thermal conductivity
High degree of thermal stability (ie) it should not deteriorate at high
temperature.
The above said properties of insulating materials vary widely with many factors.
1.
2.
3.
4.
Dimension of test piece
RMS value ,waveform and frequency of impressed voltage
Temperature and moisture content of test piece
Mechanical pressure on test piece.
1.12.8 Applications of insulating materials
1. Wires for magnet coils and windings of machines
2. Laminations
3. Machines and transformers.
---------------------------*-----------------------------1.13 RECENT TREND IN DESIGN
The digital computer has completely revolutionalized the field of design of electrical
machines.
The computer aided design eliminates the tedious and time consuming hand
calculations thereby releasing the designer from numerical drudgery to enable time to
grapple with physical and logical ideas thereby accelerating the design process.
The use of computer makes possible more trial designs and enables sophisticated
calculations to be made without intolerable tedium and excessive time.
1.13.1 Advantages of use of a digital computer
1. It has capabilities to store amount of data,count integers ,round off results
down to integers and refer to tables,graphs and other data in advance.
2. It makes it possible to select an optimized design with a reduction in cost and
improvement in performance.
3. A large number of loops can be incorporated in the design programme and
therefore it makes it easier to compare different designs out of which the best
suited can be selected.
4. It performs all simple arithmetic operations at a high speed and makes ot
possible to produce designs in a short time.
5. It is capable of automatic operation,going from one step to another without the
attention of operator.
6. It reduces the probability of error with the result highly accurate and reliable
results are obtained.
7. Larger manufacturing savings can be obtained by optimization of design.This
optimization is economically feasible only through the use of digital computers.
8. It is capable of taking logical decisions by itself if programmed into thereby
saving the man hour of the design engineers which can be utilized for other
gainful work.
1.13.2 COMPUTER AIDED DESIGN ( CAD)
In the earlier stages ,the use of digital computers for design of transformer only.
In the year 1956,moore and Williams discussed the use of digital computer for
design of rotating machines.
A flow chart was developed giving basic procedure for design of polyphase induction
motors.
The concept of optimization in electrical machine design was introduced by godwin.
The concept of two commonly acceptable approaches to machine design
1. Analysis method
2. Synthesis method
1.13.2.1 Analysis Method
In this method the choice of dimensions, materials and types of construction are made
by the designer and these are presented to the computer as input data.
The performance is calculated by the computer and is returned to the designer for him
to examine.
The designer examines the performance and makes another choice of input,if
necessary and the performance is recalculated.
COMPUTER AIDED DESIGN OF ELECTRICAL MACHINES
The process of design any electrical may be broadly divided into three major aspects.
1. Electrical design
2. Mechanical design
3. Thermal design
ADVANTAGES OF COMPUTER AIDED DESIGN
The computer can handle large volume of data to make a number of trials designs.
Speed and accuracy of calculations are very high.
It can be programmed to satisfying take logical decisions.
An optimized design with least cost and the required performance can be easily
obtained.
Generally any design method can be
1. Analysis method
2. Synthesis method
3. Hybrid method
Analysis method
A preliminary design is made by the designer regarding the machine dimensions,
materials and other constructional features and these are given as input data to the
computer and the performance quantities are calculated.
The designer examines the performance and accordingly alters the input data and
then feed them to the computer again.
The computer calculates the new performance with the revised data.
This process is repeated till the required performance is achieved.
1.13.2.2 Synthesis Method
The required performance values are also given to the computer as input.
The computer through an iterative process alters the dimensions till the required
performance is obtained.
1.13.2.3 Hybrid Method
By some human intervention a combination of analysis and synthesis methods are
adopted.
1.13.3 The method of design optimization using computers
1.
2.
3.
4.
5.
Choice of independent variables
Variable transformation
Forming the constraint functions for the performance
Forming the objective function (OBJ)
Applying the minimization technique till the OBJ becomes with in the chosen
tolerance.
1.13.4 Flow diagram for Analysis method of design.
Start
Human decision
NO
Input
`
Performance
calculations
Performance
Is
Decision
OK?
Stop
Output
1.13.5 ADVANTAGES OF ANALYSIS METHOD
1. It is fairly easy to program to use and to understand.
2. It results in considerable time saving thereby giving quick returns on the
investments made.
3. The results of analysis method are highly acceptable by designers.
1.13.6 Flow diagram for synthesis method of design.
Start
Performance specification
Assume suitable values for
variable
Design calculations
Adjust
values of
variables
Performance calculations
Compare calculated and
desired performance
NO
IS
Performance
satisfactory
Yes
Calculate total cost
Stop
Print design values
1.14 BASIC PRINCIPLES OF MAGNETIC CIRCUITS
The magnetic circuit is the path of magnetic flux.
The various elements in the flux path of salient pole machines are
Poles
Pole shoes
Air gap
Armature teeth
Armature core
Yoke
The various elements in the flux path of non –salient pole machines are
Stator core
Stator teeth
Air gap
Rotor teeth
Rotor core
Fig (1.14) Magnetic circuits in electrical machines
In electric circuit the emf circulates current against resistance when a closed path is
provided.
In magnetic circuit the mmf creates flux in a closed path against reluctance of the
path.
The coil wound on an iron core with N turns and carrying a current I will produce an
mmf of NI Ampere turns
Mmf =NI (AT)
AT – unit of mmf
The equation which relates flux ,mmf and reluctance is given by
Flux =
Ф=
Ф = AT x Λ ,
(or)
Λ=
– permeance
Reluctance of the magnetic materials can be estimated using the following equation
Reluctance
S=
x
S=
- permeability of the magnetic materials
–
- Relative permeability
Absolute permeability of free space.
H/m
The strength of the magnetic field is measured by the term magnetizing force (H).
Flux =
H=
; mmf = Flux X Reluctance per unit length
Mmf = Flux X Reluctance
H=ФX
H=Ф
X
=Ф
(B =
,A=
,
=
)
H=
For the case of a materials of length l and carrying a uniform flux,the total mmf AT is
H=
H=
AT = H x l = at x l
In a series magnetic circuit
Total reluctance
S = S1+S2+S3+………………..
S1,S2,S3 – Reluctance of individual parts
Total mmf acting around a complete magnetic circuit is
Total mmf
AT = ФS
AT = Ф (S1+S2+S3+………………..)
= AT1+AT2+AT3+………………..
= at1l1+at2l2+at3l3+……………...
AT =
In a parallel circuit
Total flux divides between the paths in inverse proportion to their releuctances.
In parallel circuit
Total flux Ф = Ф1+ Ф2+ Ф3+………………
Divide by AT
=
=
+
+
+ +………= …………
Λ = Λ1+ Λ2+ Λ3+………….
S- Total reluctance of magnetic circuit
S1,S2,S3 – Reluctance of individual parts
Λ – Total permeance of magnetic circuit
Λ1 Λ2 Λ3 – Permeance of individual parts.
----------------------------*----------------------------------
1.15 DIFFERENCE BETWEEN ELECTRIC AND MAGNETIC CIRCUITS
ELCTRIC CIRCUIT
MAGNETIC CIRCUIT
Current actually flows in the
electric circuit.
Flux does not flow but it is only
assumed to flow.
When current flows, the
energy is spent continuously
Energy is needed only to create the
flux but not to maintain it.
Resistance of the electric
circuit is independent of
current strength.
Reluctance of the magnetic circuit
depends on total flux or flux density
in the materials.
1.16 SIMILARITIES IN ELECTRIC AND MAGNETIC CIRCUIT
ELCTRIC CIRCUIT
MAGNETIC CIRCUIT
The emf circulates the
current in a closed path.
The mmf creates flux in a closed
path.
Flow of current is opposed by
resistance of the circuit.
The creation of flux is opposed by
reluctance of the circuit.
The path of current is called
electric circuit.
The path of the flux is called
magnetic circuit.
Resistance R = ρl / A = l / σA
σ conductivity
Reluctance ,S = l / μA
Current =
Flux =
Current density
δ=
Flux density
B=
------------------------------*---------------------------------1.17 MAGNETIZATION CURVES
B- H or B-at CURVES)
SOME ESSENTIAL DIFFERENCES BETWEEN ELECTRIC CIRCUIT AND
MAGNETIC CIRCUITS.
The electric current is assumed to be the flow of free electrons but there is no flow of
magnetic flux .
In an electric circuit energy is consumed so long as the current flows while in a
practical magnetic circuit,energy is expanded in creating flux and to maintain it.
The most important difference between electric and magnetic circuits arises from the
fact that whereas the resistance of an electric circuit is not directly dependent upon
value of current flowing and may be regarded as constant.
The value of reluctance of a magnetic materials is dependent upon the value of flux
passing through it.
The relative permeability of ferro magnetic materials may vary between a flow hundred
and about five hundred thousand.
The actual values of permeability and reluctance are hardly used in magnetic circuit
calculations.
The magnetization curves of magnetic materials relating flux density B to mmf per uint
length ,H or at per mt are used for the rapid determination of necessary excitation.
The analytic relations between B and H prove more convenient
B=
B=
-
A,ao,a1,a2,b1,b2 – constants
Fig (1.17.1 )Magnetization Curves
Fig (1.17.2) B H curve for iron
For non magnetic materials (like air) have a constant value of permeability and so the
B-at curve for them is a straight line passing through the origin.
Mmf per metre
H =
H=
= 800000B
Where B – wb/m2
-------------------------*----------------------------
1.18 RELUCTANCE OF THE AIRGAP IN MACHINES WITH SMOOTH ARAMTURE
All rotating machines will have a small airgap between armature and pole surface.
Fig (1.18) Reluctance Of The Airgap In Machines With Smooth
Aramture
The flux is uniform spread over the entire slot pitch and goes straight across the
airgap
L – length of the core
lg-airgap length
ys – slot pitch
Ws – width of slot
Wt – width of teeth
Reluctance of the magnetic path is
S – l / μA
l- length of magnetic path
μ –permeability of the medium
A – Area of cross section of the magnetic path.
The area of cross section of the magnetic path over one slot of the armature.
Sg =
Sy-Reluctance of the airgap
lg-length of airgap
μo-Permeability of air
-Area of cross section of airgap over one slot (The product of the length of armature
and slot pitch)
Ys-slot pitch
1.18.1 Reluctance of airgap in machines with open armature slot
Fig (1.18.1 ) slotted armature surface
In armature with open and semi enclosed slots, the flux will flow through the teeth of
the armature.
Hence effective area of the flux path is decreased ,which results increased reluctance
of airgap.
1.18.2 Case (i) Reluctance of airgap neglecting fringing effect
Fig (1.18.2) slotted armature surface
Consider the armature with open type of slots
Flux is only confined to the teeth width.
Reluctance of the airgap in machines with open armature slots Sg =
1.18.3 Case (ii) Reluctance of airgap including the effect of fringing
In armature with open slots the flux would fringe around the tooth and this fringing
would increase the area of cross section of flux path.(δWs).
Fig (1.18.3) Reluctance of airgap including the effect of fringing
Contracted slot pitch
Ys’ = Wt+ δWs
Adding and subtracting Ws
Ys’ = Wt+Ws+ δWs-Ws
Ys’ = Ys+ δWs-Ws
Ys’ = Ys-Ws(1-δ)
Ys’ = Ys - KcsWs
Kcs – (1-δ) – carter’s gap co-efficient for slots.
Reluctance of airgap in machine with open armature slot Sg=
Sg=
Sg =
1.18.4 The gap contraction factor for slots
Kgs - Gap contraction factor for slots
Kgs =
Kgs =
Kgs =
Kgs =
Kgs =
,Kgs >unity
1.18.5 Estimation of carter’s gap co-efficient for slots
Kcs = carter’s gap co-efficient for slots
Kcs =
Kcs = Wo / lg : Wo = slot opening
Open type slots
Fig (1.18.5) carter’s airgap co efficient
parallel sided open slots
Kcs = [
Where Y =
-----------------* ---------------------------------
1.19 Effects of ventilating Ducts on Reluctance of Airgap
When the length of the armature is higher than the diameter or length is greater than
0.1metre ,radial ventilating ducts are provided for better cooling of the core.
Fig (1.19 )Effects of ventilating Ducts on Reluctance of Airgap
Ventilating ducts of width 10mm in between two stacks.
Carter’s co-efficient for ducts - Kcd
Kcd =
Contracted axial length
L’ = L – KcdndWd
Kcd – carter’s coefficient for ducts
Wd – Width of the ducts
nd-number of the ducts
1.19.1 Gap contraction factor for ducts (Kgd)
Kgd =
Kgd =
=
Kgd =
1.19.2 Total gap contraction factor
Kg =
Kg =
Kg =
X = Kgs X Kgd
Kg = Kgs x Kgd
Kgs - Gap contraction factor for slots
Kgd – Gap contraction factor for ducts
-----------------------*---------------------------------
1.20 Gap contraction factor for induction motor
In induction motor both rotor and the stator has slots.
Hence the gap contraction factor should be computed for both the stator and rotor.
Kgs = Kgss x Kgsr
Kgs – Total gap contraction factor for slots
Kgss - gap contraction factor for stator slots
Kgss =
Kgsr =
Yss – stator slot pitch
Wos – Stator slot opening
Kcss – Carter’s co-efficient for stator slots
Ysr – Rotor slot pitch
Wor – Rotor slot opening.
1.20.1 Stator slot opening
Yss =
Yss =
1.20.2 Rotor slot pitch
Ysr =
Ysr =
D –stator inner diameter
Sr – no of rotor slots
Ss – no of stator slots
---------------------------*--------------------------
1.21 MMF FOR AIRGAP
Non magnetic materials
Mmf per meter of the path in non magnetic materials =
=
~ 800000B AT/m
1.21.1 Mmf for airgap in rotating machines
In machines with open or semienclosed slots ,the flux concentrates on teeth ie the
flux is not uniformly distributed in the airgap.
These are radial ventilating ducts in the machines for cooling purposes .this results in
contraction of flux in the axial direction.
1.21.2 Mmf of air gap in machines with smooth armature.
Mmf / metre for airgap
atg=
=
= 800000Bav
Bav - Average flux density in the airgap
μ –μo-Permeability of airgap
lg-length of the airgap
mmf required for airgap of length lg in machines with smooth armature ATg =
800000Bavlg
1.21.3 Mmf of air gap in machines with open armature slot and Radial ventilating ducts
The Reluctance of airgap in machines with open armature slots
>
Smooth
Armature slots
Mmf required for airgap in machines with open armature slots and ducts =
Kg x ATg for airgap in machines with smooth armature surface
= Kg x 800000Bavlg
1.21.4 Effect of Saliency on the mmf for airgap
Fig (1.21.4) Air gap flux in salient pole machine
Mmf for airgap in salient pole machines = 800000BgKglg
Kg = Kgs Kgd Kgsal
Kg – total gap contraction factor
Field form factor
Kf =
Kf =
Bg =
,Also Kf ~Ψ =
=
-----------------------*---------------------------
1.22 MMF FOR TEETH
Fig (1.22 )Mmf For Teeth
1.22.1 METHODS
1. GRAPHICAL METHOD
2. THREE ORDINATE METHOD (SIMPSON’S RULE)
3. Bt1/3 method
1.22.1 .1 GRAPHICAL METHOD
The flux density at various sections of the tooth are determined.
Flux density at any section
Bt =
At –Area of cross section of tooth at the desired section
Bt- Flux density of tooth corresponding to At
nt-number of teeth under a pole
Ф – flux per pole
1.22.1 .2 THREE ORDINATE METHOD (SIMPSON’S RULE)
The mean value of at is given by atmean = at1+4at2+at3 / 6
At1=at for the root of teeth
At2= at for the centre of teeth
At3 – at for the tip of tooth
Mmf required for the tooth ATt = atmean *lt
ATt = atmean *ds
1.22.1 .3 Bt1/3 method
Total mmf for tooth ATt =at1/3 *lt
ATt = at1/3 *ds
ds=lt
lt –length of teeth
ds- depth of slot.
----------------------------*--------------------------
1.23 Real and Apparent flux Density
Higher flux densities the flux passing through the slots becomes large and can not be
neglected .
Apparent flux Density
Bapp = total flux in a slot pitch / tooth area
Real flux density
Breal = Actual flux in the tooth / tooth area
In machines – two parallel paths for the flux over one slot pitch
1.
Iron path of tooth
2.
Air and conductor path of slot
The apparent flux density = Bapp = total flux over a slot pitch /iron area over a slot
pitch
Bapp = Breal +BaK
Ba – flux density in air
Ba =μoH = μo atreal
Bapp = Breal +4π*10-7atreal (Ks-1)
1.24 Magnetic leakage
The flux which passes through unwanted path is called the leakage flux.
The designer has to provide a path of low reluctance so that comparatively little flux
leaks away from the desired path.
The leakage path flux affects the performance of transformer and rotating machines.
1.24.1 The leakage flux affects the following performance of various machines
1. Excitation demand of salient pole machines
2. Stray load losses
3. Forces between the windings under short circuit conditions
4. Commutation conditions in dc machines.
Fig (1.24) Magnetic leakage
Leakage co-efficient
Cl = total flux / useful flux
Cl = useful flux + leakage flux / useful flux
1.24.2 Types of leakage flux
1. Slot leakage flux
2. Tooth top leakage flux
3. Zigzag leakage flux
4. Overhang leakage flux
5. Harmonic or differential leakage flux
6. Skew leakage flux
7. Peripheral leakage flux
1.25 Slot leakage reactance (reactive voltage)
When the leakage flux is associated with a winding carrying alternating current.
This reactive voltage may be considered as a voltage drop due to a leakage reactance.
A slot consist of
Zs –conductors
Conductor carrying a current of Iz
Slot inductance = flux linkages / current
= ZsФsl / Iz ---------------(1)
Фsl –slot leakage flux
Фsl = mmf * permeance
Фsl = ZsIzΛs
- ---------------------(2)
Sub (2) in (1)
Ls =( Zs/ Iz) * Zs* Iz* Λs
Ls = Zs2Λs
Slot leakage reactance Xs = 2πf*slot inductance
Xs = 2πf Zs2Λs
Xs = 2πf Zs2Lλs [ Λs= Lλs ]
----------------*------------------------
1.26 UNBALANCED MAGNETIC PULL
Fig (1.26) Unbalanced Magnetic Pull
In rotating machines if the air gap around the armature peripheral is non uniform
then radial forces are developed in the rotor .
The radial forces will act perpendicular to rotor axis.
This force or pull is called the unbalanced magnetic pull.
Force due to a pole ,in dc machine
F= ½ B2/ μo Ap
Force due to pole in ac machine
F = Bm2 /3μo DL
Area per pole Ap = πDL / p
F – force between two poles ,N
Ap - area of each pole m2
B – flux density
μo – permeability of air H/m
Estimation of unbalanced magnetic pull
In ac machines
Magnetic pull per unit area Pm = ½ B2 / μo
Unbalanced magnetic pull due to pair of pole = Pp = 2ApPm(e / lg)
Unbalanced magnetic pull due to P number of poles UMP = pole pair *Pp
= p/2 *2Ap Pm(e/lg)
UMP = P ApPm(e/lg)
When the poles are located at an angle of θ with horizontal axis
The unbalanced magnetic pull acting downwards due to pair of poles
Unbalanced magnetic pull acting downwards due to a pair of poles = 4ApPm(e/lg)sin2θ
Effects of unbalanced magnetic pull
Saturation of magnetic materials due to reduction in air gap.
Excessive vibration and noise due to unbalanced radial forces
Design guidelines to reduce unbalanced magnetic pull
The following technique are employed
1. The length of the rotor can be kept small and diameter can be made higher
2. Ball bearings are employed and rotor is dynamically balanced
3. The combination of rotor and stator slots which produce vibrations are avoided.
…………………………………………………………………………………………………………….
1.27 Magnetic loading
•
1. Total Magnetic Loading (TML)
TML=Total flux entering and leaving the armature
.
TML=pØ
2. Specific Magnetic Loading (SML)
SML=(Flux per pole)/Area Under a pole SML=(pØ)/(¶DL)
1.28 Electric Loading
•
1. Total Electric Loading (TEL)
TEL=sum of currents in all the conductors on the armature
TEL=IzZ
3. Specific Electric Loading (SEL)
SEL=(Total Armature ampere conductors)
Armatue periphery at airgap
SEL ac =(IzZ)/¶D
1.28.1 Specific magnetic and electric loading
Machines
Specific magnetic loading Bav
in wb/m2
Dc machine
0.4 to 0.8
Induction motor
0.3 to 0.6
Synchronous machine 0.52 to 0.65
Turbo alternator
0.52 to 0.65
Specific electric loading ac in
amp.cond/m
15000 to 50000
5000 to 45000
20000 to 40000
50000 to 75000
1.29 Output Equation
•
The output of a machine can be expressed in terms of its
main dimensions, specific magnetic and electric loadings and
speed.
•
Pa=CoD2Ln
Where Output coefficient Co=¶2Bavac*10-3
PROBLEMS
P1) A 350 KW, 500V, 450rpm, 6-pole, dc generator is built with an armature
diameter of 0.87m and core length of 0.32m. The lap wound armature has 660
conductors. Calculate the specific electric and magnetic loadings.
Given data
P= 350KW
N= 450rpm = n=450 / 60 = 7.5rps
Z = 660
; p=6
D = 0.87m
V = 500V
L = 0.32m
To find
Bav and ac
Formula
Bav = pФ / πDL
ac=IzZ / πD
soln
The power output of the generator
P= VI *10-3 in KW
Full load current I = P / V*10-3 = 350 / (500*10-3)
I =700 amps
Neglecting field current Ia~ I
Current through each armature conductor Iz=
Iz = Ia / a
Iz = 700 /6
Iz = 116.67A ( a= p in lap wound)
1.Specific electric loading
ac=IzZ / πD = 116.67 *660 / (π *0.87)
ac=28173 amp.cond / m
induced emf in dc generator
E = ФZnP /a
E = ФZn ( for lap wdg p=a)
Flux / pole Ф =E /Zn
= 500 / 660*(450/60)
Ф = 0.101wb
2.specific magnetic loading
Bav = pФ / πDL
= 6*0.101/ π*0.87*0.32
Bav = 0.6929 wb/m2
…………………………………………………………………………………………………………..
P2) Calculate the MMF per meter for a flux density of 1.7wb/m and a
permeability of 23.5 x
10- 6H/m.
Given data
Flux density B = 1.7wb/m2
permeability μ = 23.5 x 10-6H/m
To find
Mmf / meter = ?
Formula used
B = μH
H=B/μ
Solution
H=B/μ
H = 72.3x103A/m
Result
Mmf / meter H =
72.3x103A/m
……………………………………………………………………………………………………
P3 ) The length of the iron path of a magnetic circuit is 50cm.the area of cross
section is 12.5cm2 µr = 800, what is the reluctance of the magnetic circuit.
Given data
l=50cm =50x10-2m
Area of cross section a=12.5cm2
a=12.5x10-4
μr=800
To find
Reluctance (S)
Formula used
S=
=
Solution
S = 3.98X105A/wb
……………………………………………………………………………………………………..
P4) Calculate the mmf required for the air gap with kg = 1.1, Lg =2mm, Bg
=1.5Wb/m2
Given data
Kg=1.1
Lg=2mm=2x10-3m
Bg=1.5wb/m2
To find
Mmf for airgap
Formula
Mmf = 800000kg lg Bg
Solution
Mmf = AT=8x105x1.1x2x10-3x1.5
Mmf = 2640A
Mmf = 2640AT
……………………………………………………………………………………………………………
P5) Calculate the mmf required for one air gap of a dc machine with an axial
length of 20 cm (no ducts) and a pole are 18 cm. The slot pitch is 27 mm, slot
opening 12 mm, air gap 6 mm and the useful flux per pole 25 mWb.
carter's coefficient for slot as 0.3.
Given data
Length L = 20cm = 20x10-2m
Pole arc b = 18cm = 18x10-2m
Slot pitch Ys = 27mm
Slot opening Wo = 12mm
No ducts Kg = Kgs
Airgap lg = 6mm = 6x10-3
Flux / pole Ф = 25mwb = 25x10-3wb
Kcs = 0.3
To find
Mmf required for airgap
Formula
Mmf required for airgap ATg = 800000kg lg Bg
Take
Formula for Kg and Bg
Since there are no ducts
Kg = Kgs
Kgs = gap contraction factor for slots
Kgs =
Kgs =
Kgs = 1.1538
For Bg
We know that
Bav =
=
,Ψ=
, pole arc – b
Pole pitch -
Flux density at the centre of the pole Bg =
Bg =
Bg =
Bg =
Bg =
=
Bg=
Bg= 0.6944 wb /m2
Soln
ATg = 800000 *Kg*Bg*lg
= 800000*1.1538*0.6944*6*10-3
ATg = 3845.75 AT
……………………………………………………………………………………………………………
P6) A 15 KW, 230 V, 4- pole dc machine has the following data: armature
diameter = 0.25 m, armature core length = 0.125 m, length of air gap at pole
center = 2.5 mm, flux per pole = 11.7 x 10-3 Wb, (pole arc/pole pitch) = 0.66.
Calculate the mmf required for air gap (i) if the armature surface is treated
as smooth (ii) if the armature is slotted and the gap contraction factor is 1.18.
Given data
Power developed = 15KW
Armature diameter D = 0.25m
Armature core length L = 0.125m
Length of air gap lg=2.5mm
Flux per pole Ф = 11.7*10-3wb
Pole arc (b) / pole pitch () = Ψ = 0.66
No of poles p=4
Gap contraction factor Kg=1.18
To find
Mmf required for airgap
1.
For smooth armature
2. For slotted armature
Formula
i)Mmf required for airgap with smooth armature ATg=800000 Bg lg
ii) mmf required for airgap with slotted armature ATg = 800000 Kg Bg lg
To find Bg
Bg = Bav / Ψ
Bav =
Bav =
Bav =0.47 wb /m2
Flux density at the centre of the pole
Bg = Bav / Ψ
Bg=0.4767 / 0.66
Bg=0.7223wb/m2
i)
Mmf required for airgap with smooth armature ATg=800000 Bg lg
= 800000*0.7223*2.5*10-3
ATg = 1445AT
ii) mmf required for airgap with slotted armature ATg = 800000 Kg Bg lg
= 800000 * 1.18*0.7223*2.5*10-3
ATg = 1705AT
………………………………………………………………………………………………………………
P7) Determine the air-gap length of a dc machine from the following particulars:
gross-length of core = 0.12m, number of ducts = one and is 10 mm wide, slot
pitch = 25 mm, slot width = 10 mm, carter's coefficient for slots and ducts =
0.32, gap density at pole center = 0.7 Wb/m2; field mmf/pole = 3900 AT, mmf
required for iron parts of magnetic circuit = 800AT,
Given data
Gross length L = 0.12m
No of ducts nd=1
Wd=10mm
Slot pitch Ys = 25mm
Slot width Wt = 10mm
Kcs = Kcd = 0.32
Gap density Bg=0.7 wb/m2
Mmf per pole = 3900AT
Mmf per iron = 800AT
To find
Airgap length lg=?
Formula
We know that
Mmf for airgap ATg = 800000 Kg Bg lg
lg = ATg /800000 Kg Bg
soln
mmf for airgap
ATg = mmf per pole – mmf for iron parts
ATg =3900 – 800
ATg = 3100AT
Gap contraction factor for slots
Kgs = Ys / (Ys – KcsWt)
= 25 / (25-0.32*10)
Kgs = 1.1468
Gap contraction factor for ducts
Kgd
=
Kgd =
Kgd = 1.02
Total gap contraction factor
Kg =Kgs * Kgd
Kg = 1.1468 * 1.02
Kg = 1.1782
lg=ATg / 800000*Bg*Kg
= 3100 / 800000*0.7*1.1782
lg=4.678*10-3
lg=4.7mm
……………………………………………………………………………………………………………
P8 ) The following data refers to a 20KW,2 pole DC motor ,Air gap =2.5mm,Area
under
each
pole
=
20x10-3m,air
gap
flux
density
=0.8wb/m2,vertical
displacement of rotor =0.4mm.calculate the unbalanced magnetic pull acting
downwards if the poles are located 45 degree with horizontal axis.
Given data
P= 20KW
p=2
lg=2.5mm
Area /pole Ap =20*10-3m
Airgap flux density Bg=0.8wb/m2
Displacement of rotor e= 0.4mm
θ=45˚
To find
Unbalanced magnetic pull acting downwards
Formula
Unbalanced magnetic pull due to 2 poles = 4ApPm (e /lg ) sin2θ
To find Pm
Magnetic pull per unit area = Pm = ½ B2 / μo
Soln
Pm = ½ B2 / μo = ½ (0.82 / 4π*10-7)
Pm = 254.64 *103N/m2
Unbalanced magnetic pull due to 2 poles = 4ApPm (e /lg ) sin2θ
= 4* 20*10-3 * 254.64*103*(0.4/2.5)*(sin45)2
Unbalanced magnetic pull due to 2 poles = 1629.7 ~1630N
………………………………………………………………………………………………………………
P9 ) Calculate the unbalanced magnetic pull of 4 pole DC machine having air gap
flux density of 0.85wb/m2, and a gap length of 2mm. the area of each pole is
24x10-3m2 and poles are symmetrically mounted. The accentricity is 15% in the
air gap.
Given data
p=4
lg=2mm
B=0.85wb/m2
Ap=24*103m2
Accentricity= e = 15% of lg
To find
Unbalanced magnetic pull due to four poles = p*Ap*Pm*(e/lg)
Formula
Magnetic pull per unit area Pm = ½ B2 / μo
Pm = ½ 0.852 / 4π*10-7
Pm= 287.4736*103 N/m2
e=15% of lg
e=15 /100*2
e=0.3mm
Unbalanced magnetic pull due to four poles = p*Ap*Pm*e/lg
= 4* 24*10-3*287.47 *103*(0.3/2)
Unbalanced magnetic pull due to four poles
=4139.6 N
……………………………………………………………………………………………………………
P10 )Calculate the apparent flux density at a section of the teeth of an armature
of a DC machine from the following data at that section, slot pitch=24mm, slot
width=tooth width=12mm, length of armature core including 5 ducts of 10mm
each=0.38m, iron stacking factor=0.92, true flux density in teeth at that section
is 2.2wb/m2 for which the mmf is 70,000AT/m.
Given data
Slot pitch Ys = 24mm
Slot width = tooth width
Ws = 12mm
L = 0.38m
Wt =12mm
Ducts = 5 nos
Wd= 10mm
Stacking factor Sf= 0.92
B real = 2.2wb/m2
at=70000AT/m
To find
Apparent flux density Bapp =?
Formula
Bapp = Breal + [μo at (Ks-1)]
Soln
Ks =
Li = stacking factor * (core length – total width of ducts )
Li = Sf ( L -5Wd)
Li = 0.92* ( 0.38 – 5*10*10-3)
Li = 0.3036
Ks =
=
Ks = 2.5
Bapp = Breal + [μo at (Ks-1)]
= 2.2 +4π*10-7*70000(2.5-1)
B
app
= 2.332 wb/m2
……………………………………………………………………………………………………………….
P11) Find the permeability at the root of the teeth of a DC machine armature
from the following data, slot pitch 2.1cm,tooth width at the root 1.07cm,gross
length 32cm,stacking factor=0.9 real flux density at the root of the teeth
2.25tesla,apparent flux density at the root 2.36tesla.
Given data
slot pitch 2.1cm = Ys = 2.1cm
tooth width Wt = 1.07cm
gross length L = 32cm= 32*10-2m
stacking factor Sf = 0.9
Breal = 2.25 tesla
Bapp = 2.36 tesla
To find
Permeability = ?
Formula
Breal = μ at
real
μ= Breal / at
real
Bapp = Breal +4π*10-7atreal (Ks-1)
Ks =
Ks =
( Li = SfL)
Soln
Bapp = Breal +4π*10-7atreal (Ks-1)
atreal = Bapp - Breal / μo(ks-1)
To find
Ks =
Ks =
Ks = 2.181
atreal
= Bapp - Breal / μo(ks-1)
= 2.36-2.25 / 4π*10-7(2.181-1)
atreal = 74120 AT/m
To find
μ= Breal / atreal
μ = 2.25 / 74120
μ = 30.356*10-6 H/m
……………………………………………………………………………………………………………….
P12)Calculate the mmf for air gap in a three phase induction motor from the
following data stator bore 500mm,core length = 220mm,stator slots 76,rotor
slots 94,slot opening 2mm,air gap length 0.9mm,take Kgd=1.15 and air gap flux
density 0.54wb/m2
Given data
Stator bore D = 500mm
Core length L = 220mm
Stator slots Ss = 76
Rotor slots Sr = 94
Slot opening Wos = 2mm
Wor = 2mm
Air gap length lg=0.9mm
Kgd = 1.15
Bav = 0.54wb/m2
To find
Mmf for air gap
Formula
Mmf for air gap = 800000 Bav Kg lg
Total gap contraction factor Kg = Kgs*Kgd
Soln
Carter’s co efficient for stator slots Kcs = 1/ (1+5lg/Wos)
Kcs =
Kcs = 0.3077
Kcss =Kcsr = 0.3077
Gap contraction factor for stator slots Kgss =
Gap contraction factor for rotor slots Kgsr =
Stator slot pitch Yss =
= π *500 / 76 = 20.67mm
Rotor slot pitch Ysr =
= π (500-2*0.9)/ 94 = 16.65mm
Kgss =
Kgss = 1.0307
Kgsr =
Kgsr = 1.0307
Kgs= Kgss *Kgsr
Kgs = 1.0307 *1.0307
Kgs = 1.0703
Total gap contraction factor
Kg = Kgs *Kgd
Kg = 1.0703*1.15
Kg= 1.2308
Mmf for air gap = 800000 Bav Kg lg
= 800000 *0.54*1.203*0.9*10-3
Mmf for air gap = 478.5AT
……………………………………………………………………………………………………………….
P13) University repeated question
Calculate mmf required for the air gap of a machine having core length of 0.32m
including 4 ducts of 10mm each ,pole arc of 0.29m,slot pitch of 65.4mm ,slot
opening of 5mm,air gap length of 5mm,flux per pole of 52mwb,given carter’s
coefficient is 0.18 for opening /gap =1 and is 0.28 opening / gap =2 .
Given data
L= 0.32m
nd=4
Wd=10mm
Wo = 5mm
Lg=5mm
b=0.29m
Ф = 52*10-3wb
Ys = 65.4mm
Kcs = 0.18
Kcd = 0.28
Find
Mmf required for air gap =?
Formula
Mmf = 800000 Bg Kg lg
Soln
Bg=Bav / Ψ
= pФ / πDLb
[ Ψ = b / ]
= pФπD / πDLbp
Bg = Ф / L*b
Bg = 52*10-3 / 0.32*0.29
Bg = 0.56
Kg = Kgs *Kgd
Kgs =
= 65.4*10-3 / 65.4*10-3-0.18*5*10-3
Kgs = 1.01
Kgd =
= 0.32 / 0.32 –(0.28*4*10*10-3)
Kgd = 1.003
Kg = Kgs *Kgd
Kg = 1.01*1.003
Kg= 1.013
ATg = 800000 *0.56*1.013*5*10-3
ATg = 2269.12 AT
…………………………………………………………………………………………………………
UNIT II
DC MACHINES
Constructional details- Output equation - Choice of specific electric and
magnetic loadings - Separation of D and L for rotating machines. Estimation of
number of conductors / turns - Coils - armature Slots - Conductor dimension Slot dimension. Choice of number of poles - Length of air gap - Design of field
system, Interpoles, Commutator and Brushes.
Consists of
- Constructional Elements
- Output Equation
- Choice of specific loadings
- Selection of number of poles
- Length of airgap
- Armature design
- Field system design
- Commutator and brushes
- Efficiency and Losses
2.1 CONSTRUCTIONAL ELEMENTS
(i) Armature
(1) winding
(2) core
(3) commutator
(ii) Field
(1) winding
(2) core
(3) pole shoe
(iii) Frame.
A.MUMTHAJ,AP/ EEE
EMD
Page 6 6
2.2 OUTPUT EQUATION
The output of a machine can be expressed in terms of its main dimensions,
specific magnetic and electric loadings and speed.
Pa=CoD2Ln
Where Output coefficient Co=¶2Bavac*10-3
The equation which relates the power output to D.L,Bav,ac and n of the machines is
known as input equation.
Induced emf in armature
E = ФZNp / 60*a
E = ФZnp /a
------------------------------------------------(1)
The conductors are connected in parallel paths ,if a – number of parallel path,then
Current through each conductor is
Iz= Ia/ a
Or
Ia = Iz a
------------------------(2)
We know that
Specific magnetic loading Bav = pФ / πDL
Or
pФ = πDLBav ------------(3)
Specific electric loading ac = Iz z / πD
Or
Iz z = πD ac ---------------(4)
In dc generator
Power generated in the armature = induced emf * armature current
In dc motor
Power generated in the armature = induced emf(back emf) * armature current
Power generated in the armature Pa = E Ia*10-3 in KW ---------------(5)
A.MUMTHAJ,AP/ EEE
EMD
Page 6 7
Substituting E and Ia from eqn 1 and eqn 2 in eqn 5
(5) ------------
Pa = (ФZnp / a ) * aIz *10-3
Pa = pФ*Iz z *n *10-3
------------------------(6)
Substituting pФ and Iz z value in eqn (6)
Pa= πDLBav*πDac*n*10-3
Pa = π2Bavac*10-3*D2Ln
Pa = CoD2Ln
--------------------------------------------------(7)
Where Co = π2Bavac*10-3
Co – o/p co efficient
D2L – volume of active part
Pa volume of active part *speed
-----------------------------*---------------------------------
2.3 ALTERNATIVE EXPRESSION FOR POWER DEVELOPED IN ARMATURE
Power developed in armature in KW = total magnetic loading * total electric loading *
speed in rps * 10-3
Pa = pФ*IzZ*n*10-3
Power developed in armature of a DC generator = (o/p power )+(Armature cu
loss)+(field
cu loss )
Power developed in armature of a DC generator = (input power) –
(Friction,windage,Iron
losses)
if P = output
η -efficiency
input power = P / η
A.MUMTHAJ,AP/ EEE
EMD
Page 6 8
power developed by armature of a DC motor = (output power )+(friction,windage,iron
losses)
in case of large machines the friction,windage and iron losses can be neglected .
Pa = P / η (for generator )
Pa = P ( for motors)
Total losses = (input power ) – (output power )
=P/η–P
Total losses = P(1-η/η)
-------------------------------------*----------------------------------------------------------------2.4 SEPARATION OF D AND L FOR DC MACHINES
Separation of D and L depends on
1. Pole proportional
2. Peripheral speed
3. Moment of inertia
4. Voltage between adjacent commutator segments
Pole proportional
Fig (2.4 )Pole proportional
A.MUMTHAJ,AP/ EEE
EMD
Page 6 9
The dimension of the machine are decided by the square pole criterion
This states that foe a given flux and cross section area of pole, the length of mean turn
of field winding is minimum when the peripheral forms a square.
Length = pole arc
L= b= Ψ
Ψ – 0.64 to 0.72 ; Ψ = b / ; b= Ψ
L / = 0.64 to 0.72
However in practice L is slightly greater than pole arc
b=L / = 0.7 to 0.9
for square pole criteria choose
L / = 0.7
L – core length
Ψ – ratio of pole arc to pole pitch.
Peripheral speed
The peripheral speed of armature is sometimes a limiting factor to the value of
diameter
The peripheral speed should not exceed about 30m/sec
Moment of inertia
For low moment of inertia diameter should be made as small as possible.
Voltage between adjacent commutator segments
Maximum voltage between adjacent segments Ecm = 2BgmLVaTc
Bgm - maximum airgap flux density under load condition
Tc – turns per coil
-------------------------------*---------------------------------------Choice of armature length
A.MUMTHAJ,AP/ EEE
EMD
Page 7 0
The factors to be considered for the choice of armature length are
1. Cost
2. Ventilation
3. Voltage between adjacent commutator segments
4. Specific magnetic loading
Core length is very large then ventilation of the core will be difficult
The voltage between adjacent commutator segments at load is to be limited to 30V
Emf should not exceed 7.5 / TcNc -----------------(1)
Tc- turns per coil
Nc –number of coils between adjacent segments
Nc = 1(simplex lap winding )
Nc = p/2 (simplex wave wdg)
P – no of poles
Induced emf of a conductor = Bav Lmax Va --------------------(2)
Va – peripheral speed
Equate (1) and (2)
Bav Lmax Va
= 7.5 / TcNc
Maximum value of armature core length
Lmax = 7.5 / (Tc*Nc*Bav*Va)
--------------------------*----------------------------------------
2.5 Choice of armature diameter
The factors to be considered for the choice of armature diameter
1. Peripheral speed
2. Pole pitch
3. Specific electric loading
4. Induced emf per conductor
A.MUMTHAJ,AP/ EEE
EMD
Page 7 1
5. Power output
Pole pitch
Pole
Pole pitch (mm)
2
Upto 240
4
240 to 400
6
350 to 450
Above 6
450 to 500
Maximum value of armature diameter
D max = Pa*103 / π ac*ez
ez-emf per conductor
-------------------------*----------------------------2.6 CHOICE OF SPECIFIC LOADING
Choice of specific magnetic loading
Depends on, 1. Flux density in teeth
2. Frequency of flux reversal
A.MUMTHAJ,AP/ EEE
EMD
Page 7 2
3. Size of machine
(i) Flux density
Large values of Bav in teeth increases field mmf.
Higher mmf results in increase of iron loss, cu loss & cost of cu.
Bav does not exceed 2.2wb/m2
(ii) Frequency of flux reversal
If f is high then iron losses in arm. Core & teeth would be high.
So high value of Bav is not used.
(iii) Size of machine .
If size increases Bav also increases.
As the dia increases the width of the tooth also increases, permitting increased value
of Bg without saturation.
Bg bet 0.55 to 1.15Wb/m2 & Bav 0.4 to0.8 wb/m2
---------------------------*---------------------------
2.7 CHOICE OF SPECIFIC ELECTRIC LOADING
Depends on, 1. Temperature rise
2. Speed of machine
3. Voltage
4. Size of machine
5. Armature reaction
6. Commutation
(i) Temperature rise
Higher ac results in high temp rise of wdgs.
Temp rise depends on type of enclosure & cooling techniques employed.
Ex. In m/cs. Using class F insulation which can withstand a temp. of 155’c, the value
of ac can be approx. 40% higher than that used in m/cs. Designed for class
A.MUMTHAJ,AP/ EEE
EMD
Page 7 3
A insulation which can withstand a temp. of only 105’c.
(ii) Speed of machine
If N is high, ventilation of the machine is better & therefore greater losses
can be dissipated. Thus higher ac can be used for high N.
(iii) Voltage
In high V m/cs large space is reqd. for insulation & therefore less space for
conductors.
Ie. Space left for conductors is less & therefore we should use a small value of ac.
(iv) Size of m/c
In large size m/cs it is easier to find space for accommodating conductors.
Hence ac can be increased with increase in dimensions.
(v) Armature reaction
With high ac, arm. Reaction will be severe. To counter this field mmf is
increased & so cost goes high.
(vi) Commutation .
Ac=Iz*Z
D*Π
High value of ac will have either
(i) Large Z OR
(ii) small dia D
(i) M/c have large Z having large no. of turns; L is proportional to square
of no. of turns; so large ac
(ii) If small dia, it is not possible to usewide slots because otherwise the space left for
teeth will become smaller giving rise to high B in them. Only way is us ting deeper
slots to use. But the deeper slots increases the L value.
Increased L increases reactance voltage which delays the commutation.
High ac worsens the commutation condition in m/cs.
From commutation point of view small ac is desirable.
A.MUMTHAJ,AP/ EEE
EMD
Page 7 4
Ac lies bet. 15,000 to 50,000amp.cond/m
-------------------------*------------------------
2.8 SELECTION OF NO. OF POLES
The selection of number of poles depends on
1. Frequency
2. Length of commutator
3. Weight of iron parts
4. Weight of copper
5. Labour chargers
6. Flash over and distortion of field form.
The aim of the designer to select the main dimensions as will result in the minimum
cost and yet at the same time meet the desired specifications.
As for as the magnetic circuit is concerned it is necessary to choose a suitable no. of
poles and to suitably proportion them. A proper design of the electric circuit requires
suitable dimensions which result in satisfactory arrangements for
wdg and
commutator.
For choice of no. of poles let us assume D,L,Bav & ac are const.P only variable.
Frequency between 25 to 50Hz
Increasing the number of poles,the weight of iron in the armature core can be
decreased .
2.8.1 Advantages of large number of poles
Large number poles results in reduction of the following
1. weight of armature core and yoke (Wi)
2. cost of armature and field conductors
3. overall length and diameter of machine
4. length of commutator
5. distortion of field form under load conditions.
2.8.2 Disadvantages of large number of poles
A.MUMTHAJ,AP/ EEE
EMD
Page 7 5
Large number poles results in increase of the following
1. frequency of flux reversals
2. labour charges
3. possibility of flash over between brush arms.
2.8.3 Guiding factor / condition factor for choice of number of poles
1.
The frequency should lie between 25 to 50HZ
2. The value of current per parallel path limited to 200amps
current /brush arm should not be more than 400amps
current / parallel path = Ia / p for lap wdg
= Ia /2 for wave wdg
Current / brush arm = 2Ia / p for lap wdg
= Ia for wave wdg
p-number of poles
3. The armature mmf should not be too large
Armature mmf per pole
Output in KW
Armature mmf per pole in AT
Upto 100
5000 or less
100 to 500
5000 to 7500
500 to 1500
7500 to 10000
Over 1500
Upto 12500
(i) Frequency
F=pn/2
If p is high then f also increases which may lead to excessive iron
A.MUMTHAJ,AP/ EEE
EMD
Page 7 6
losses in arm. Teeth and core.
In case of high speed turbo alternators the no. of poles used is 2
oterwise the frequency will become high giving rise to excessive iron losses.
(ii) Weight of iron parts
No. of poles effects the no. of parts in magnetic circuit
(a) Yoke area
For 2 pole m/c
Total flux around the airgap is const
=ØT
Flux per pole
= ØT/2
At yoke the flux further divided into 2 parts & therefore
Yoke has to carry a flux of ØT/4
For 4 pole m/c
Flux per pole = ØT/4
At yoke the flux further divided into 2 parts & therefore
Yoke has to carry a flux of ØT/8
Thus if the no. of poles is doubled, the flux carried by yoke is halved.
The flux carried by yoke is inversely proportional to no. of poles.
Therefore by using no. of poles, the area of cross section of yoke is
proportionatelydecreased.
(b) Armature core area
The flux per pole divides itself in 2 paths in the armature core.
For 2 pole m/c
Flux in the arm. = ØT/4
For 4 pole m/c
Flux in the arm. = ØT/8
Thus we can safely use a large no. of poles so as to reduce the wt of
iron in the yoke.But increase in no. of poles would result in higher iron
A.MUMTHAJ,AP/ EEE
EMD
Page 7 7
loss in arm. Core owing to increased frequency of flux reversals.
We can examine this here.
For 2 pole m/c
Eddy ct loss in arm. Core α Bc2f2α Bc2(pn/2)2
s α (ØT/4A2)2*(2*n/2)2
α (ØT2n2)/16A22
For 4 pole m/c
Eddy ct loss in arm. Core α Bc2f2 α Bc2(pn/2)2
s α (ØT/8A4)2*(4*n/2)2
α (ØT2n2)/16ª42
-----------------------------------*--------------------------------
2.9 LENGTH OF AIRGAP
A small gap is provided between the rotor and stator to avoid the friction
between the stationary and rotating parts.
A large value of airgap results in
1. Lesser noise
2. better cooling
3. Reduced pole face losses
4. Reduced circulating losses
5. Less distortion of field form
6. Higher field mmf which reduces armature reaction
Lengthof airgap (lg) =
-----------------------*---------------------------------------
A.MUMTHAJ,AP/ EEE
EMD
Page 7 8
PROBLEMS
P1) Find the main dimensions of a 200KW, 250V, 6 pole, 1000 rpm generator.
The maximum value of flux density in the gap is 0.87 Wb/m2 and the ampere
conductors per metre of armature periphery are 31000. The ratio of pole arc to
pole pitch is 0.67 and the efficiency is 91 percent. Assume the ratio of length of
core to pole pitch = 0.75
Given data
P=200KW
V=250V
P=6
N=1000rpm = 1000/ 60 rps
Flux Density In The Gap = Bg=0.87wb/m2
AmpCond / metre ac =31000
Pole arc / pole pitch =Ψ = 0.67
Effi ciency η =91%
Length of core / pole pitch = L / = 0.75
Formula
Pa=CoD2Ln
Soln
Power developed in armature Pa=P / η
= 200 / 0.91
Pa = 219.78KW
To find Co
Output coefficient Co = ∏2Bavac*10-3
Bg = Bav / Ψ
Bav = BgΨ
Co = ∏2 BgΨac*10-3
Co = ∏2*0.67*0.87*31000*10-3
A.MUMTHAJ,AP/ EEE
EMD
Page 7 9
Co = 178.34KW/m3-rps
Then Pa = CoD2Ln
D2L = Pa / Co*n
= 219.78 / (178.34*(1000/60))
D2L = 0.0739m3
Given L / = 0.75
L=0.75 *
L = 0.75 *πD / p = 0.75*π*D/ 6
L=0.3927D
D2L = 0.0739
D2(0.3927D)= 0.0739
0.3927D3 = 0.0739
D = (0.0739 / 0.3927)1\3
D= 0.57m
L=0.3927D
L= 0.22m
Result
The diameter of the armature, D = 0.57 m
The length of the armature, L = 0.22 m
……………………………………………………………………………………………………………
P2 ) Find the main dimensions and the number of poles of a 37 KW, 230V, 1400
rpm shunt motor so that a square pole face is obtained. The average gap density
is 0.5 Wb/m2 and the ampere conductors per metre are 22000. The ratio of pole
arc to pole pitch is 0.7 and the full load efficiency is 90 percent.
Given Data
37 KWSquare pole face
A.MUMTHAJ,AP/ EEE
= 0.7
EMD
Page 8 0
230 V
Bav = 0.5 Wb/m2
1400 rpm
ac = 22000
= 90%
Soln
If poles p= 2 ,then f = PN/ 120 = 2*1400 / 120 = 23.33Hz
If polesp= 4 ,then f= 4*1400/ 120 = 46.67Hz
Power input Pi = VI*10-3KW
Power input Pi = power o/p / η
I = P / ηV*10-3
I = 37 / 0.9*230*10-3
I = 178.74A
Ia = I = 178.74A
Armature current is less than 200A,hence the current per parallel path will not
exceed the upper limit of 200A.
When p=4,the frequency f=46Hz,which lies in the range of 25 to 50Hz
Hence p = 4 is the best choice.
o/p co efficient Co = ∏2Bavac*10-3
Co = ∏2*0.5*22000*10-3
Co = 108.57 KW / m3-rps
Then Pa = CoD2Ln
D2L = Pa / Co*n
D2L = 37 / 108.57 *(1400/60)
D2L = 0.0146m3
Pole arc / pole pitch = 0.7 ( for square pole flux)
Length / pole pitch = L / = 0.7
L= 0.7
L= 0.7( π*D) / p
= 0.7*π*D / 4
A.MUMTHAJ,AP/ EEE
EMD
Page 8 1
L= 0.5498D
D2L = 0.0146
D2(0.5498D) = 0.0146
D3(0.5498) = 0.0146
D= (0.0146 / 0.5498 )1/3
D= 0.3m
L = 0.5498D
L = 0.5498 * 0.3
L = 0.165m
Result
Number of poles, p = 4
Diameter of armature, D = 0.3 m
Length of armature, L = 0.165 m
-------------------------*---------------------------------P3) Calculate the main dimensions of a 20Hp, 1000 rpm, 400V, dc motor. Given
that bav = 0.37 Wb/m2 and ac = 16000 amp.cond./m. Assume an efficiency of
90%.
Given Data
P=20 Hp = 20 * 0.746 = 14.92KW
Bav = 0.37 Wb/m2
N = 1000 rpm = 1000/60
n =16.66rpm
V=400 V
ac = 16000 amp.cond./m
= 90%
Formula
Pa = Co = D2Ln KW
Power i/p Pi = P / η
A.MUMTHAJ,AP/ EEE
EMD
Page 8 2
Pi = 14.92 / 0.9
Pi = 16.57KW
Also Pi = VI *10-3
Load current I = Pi / V*10-3
I = 16.57 / 400*10-3
I = 41.45A
Ia = I = 41.45A
Let
P=2 ; f= N*p / 120 = 2*1000 / 120 = 16.67Hz
P=4; f= N*p / 120 = 4*1000 / 120 = 33.33Hz
P=6 ; f= N*p / 120 = 6*1000 / 120 = 50Hz
Frequency lie in the range of 25 to 50Hz for minimum cost the highest possible choice
of poles should be chosen.
Hence p=6
Output co efficient
Co = ∏2Bavac*10-3
Co = ∏2*0.37*16000*10-3
Co = 58.428 KW / m3-rps
Power developed in armature
Pa = CoD2Ln
D2L = Pa / Co*n
D2L = 14.92 / 58.428*16.66
D2L = 0.0153m3
Square pole face
L / = 0.7
L= 0.7( π*D) / p
= 0.7*π*D / 6
A.MUMTHAJ,AP/ EEE
EMD
Page 8 3
L= 0.3665D
D2L = 0.0153
D2 (0.3665D) = 0.0153
D30.3665 = 0.0153
D = (0.0153 / 0.3665 )
1/3
D = 0.34m
L= 0.3665D
L = 0.3665*0.34
L= 0.127m
Result
Diameter of armature, D = 0.35 m
Length of armature, L = 0.128 m
……………………………………………………………………………………………………………..
2.10 Area of cross section of armature conductor
Area of X section depends current through a conductor (Iz) , current density δa
Large value of current density results in smaller size of conductors,low cost,higher
temperature rise high copper loss and lesser area of slot.
Current density of copper conductor is 4 to 7A/mm2
Current through armature conductor Iz=Ia / a
Area of X section of armature conductor aa=Iz / δa
Armature current Ia = Pa / E*10-3
Magnetic circuit
The path of magnetic flux is called magnetic circuit
Magnetic circuit comprises
Yoke / frame
Poles
A.MUMTHAJ,AP/ EEE
EMD
Page 8 4
Airgap
Armature teeth and armature core.
……………………………………………………………………………………………………………
2.11 DESIGN OF COMMUTATOR AND BRUSHES
Fig (2.11) Design Of Commutator And Brushes
The commutator and brush arrangement are used to convert the bidirectional internal
current to unidirectional external current or viceversa. The current flows through the
brushes mounted on the commutator surface. The brushes are located at the
magnetic neutral axis which is midway between adjacent poles. When a armature
conductor pass through the magnetic neutral axis, the current in the conductor
reverses from one direction to the other. Since the brushes are mounted on magnetic
neutral axis, the coil undergoing current reversal is short circuited by carbon brush.
During this short circuit period, the current must be reduced from its original value to
zero and then built up to an equal value in the opposite direction. This process is
called the time of commutation.
The process of commutation is classified into
(i)Resistance commutation
A.MUMTHAJ,AP/ EEE
EMD
Page 8 5
(ii)Retarted commutation
(iii)Accelerated commutation
(iv)Sinusoidal commutation
---------------------------------------------------------------------------------------------------------------------
2.12 EFFICIENCY AND LOSSES
Efficiency of a machine is defined as the ratio of output of the machine to the input
supplied to the machine.
Losses in the dc machine are given as follows
(i)Iron loss
(ii)Copper loss
(iii)Windage and friction loss
P4) Design a suitable commutator for a 350 KW, 600 rpm, 440 V, 6 pole dc
generator having an armature diameter of 0.75 m. The number of coils is 288.
Assume suitable values wherever necessary.
Given Data
P = 350 KW ; no of coils C = 288
Armature diameter = D = 0.75 m
p=6
V = 440 V
N = 600 rpm
To find
Diameter of commutator
Length of commutator
Soln
Diameter of commutator = 0.6 to 0.8 *D
Dc = 0.75 D
Dc = 0.75 * 0.75
Dc = 0.56m
Peripheral speed of the commutator Vc = πDcn
Vc = π*0.56*(600/ 60)
Vc = 17.59m/sec
A.MUMTHAJ,AP/ EEE
EMD
Page 8 6
Vc>15m/s ,hence reduce Dc
ii) Dc=0.64 D = 0.64*0.75 = 0.480
Vc = π*0.480 *(600/60) = 15.08m/sec
Vc = 15m/sec
Hence Dc=0.48m
Mimimum width of the commutator = 4mm
Number of commutator segments = number of coils =288
Width of commutator = commutator pitch
The actual commutator pitch ,βc=πDc / C
βc=π*0.48 / 288
βc=5.2*10-3m
βc=5.2mm
commutator pitch is above the minimum value of 4mm
length of commutator Lc= nb(Wb+Cb)+C1+C2
armature current , Ia = P*103 / V = 350*103 / 440
Ia = 795.5amps
Current per brush area = 2Ia / p (lap wdg)
= 2*795.5 / 6 = 265.2A
Current per brush is limited to 70amps
Number of brushes nb= current /
brush area / (70)
nb = 4
let nb = 6 ; Ab = Ib/ δb ; δb= Ib / Ab
current per brush δb = 265.2 / 6 = 44.2amps.
(current carried by each brush )
Thickness of brush tb = 3*width of the commutator segments
= 3*5.2
A.MUMTHAJ,AP/ EEE
EMD
Page 8 7
tb=15.6mm
width of brush Wb = ab / tb
ab = current carried by each brush / current density in brush
ab = 44.2 / 75*10-3
ab = 590mm2
Wb= 589.3 / 15.6
Wb = 37.77mm
Length of commutator Lc= nb(Wb+Cb)+C1+C2
Cb = 5mm
C1 = 20mm
C2 = 20mm
Lc= 6(38+5)+20+20
Lc= 298mm
Lc= 0.298m
Result
Number of commutator segments
=
288
Diameter of commutator
=
0.48 m
Width of commutator segment
=
5.2 mm
Number of brushes
=
6
Thickness of brush
=
15.6 mm
Width of brush
=
38 mm
Length of commutator
=
0.3 m
………………………………………………………………………………………………………………
P5)
Draw the winding diagram in the developed form for a 4-pole, 12 slots
simplex lap connected dc generator with commutator having 12 segments.
Indicate the position of brushes.
A.MUMTHAJ,AP/ EEE
EMD
Page 8 8
Soln
Number of coils = number of commutator segments
No of commutator segments = 12
Pole =4
No of coils C= 12
No of coil sides = 2C= 2*12 = 24
Coil sides per slot = no of coil sides / no of slots
= 24 / 12
Coil sides per slots = 2
Step I
Representation of poles
Step II
Representation of coil sides
Top coil sides represented by odd number
Bottom side represented by even number
A.MUMTHAJ,AP/ EEE
EMD
Page 8 9
Coil sides per pole = no of coil sides / no of poles = 24/ 4 = 6
Step III
Representation of direction of current
Under north pole marked - upwards
Under south pole marked - downward
Winding pitches
Lap winding
Back pitch Yb = 2C
+K
P
Yb=(2*12 / 4) +K = 6+K
Let K= 1;Yb = 6+1 = 7 coil sides
Winding pitch
A.MUMTHAJ,AP/ EEE
EMD
Page 9 0
Y = 2 ( for lap Y is always +2)
Front pitch
Yf = Yb-Y = 7-2 = 5 coil sides
Commutator pitch
Yc = 1 segment ( for lap Yc is always +1)
The front and back connections of the coil sides are determined as shown below,
Let us start with top coil side marked 1
Bottom coil side of the first coil (back connection) = top coil side of first coil +back
Pitch
= 1+Yb = 1+7 = 8
Top coil side of the second coil (front connection) = bottom coil side of first coil – front
Pitch
= 8 – Yf = 8-5 =3
Winding calculations
1+7 = 8
8-5 = 3
3+7 = 10
10-5=5
5+7 = 12
12-5= 7
7+7 = 14
14-5=9
9+7=16
16-5=11
11+7=18
18-5=13
13+7=20
A.MUMTHAJ,AP/ EEE
EMD
Page 9 1
20-5=15
15+7=22
22-5=17
17+7=24
24-5=19
19+7=26-24=2
26-5=21
21+7=28-24=4
28-5=23
23+7=30-24=6
6-5=1
Back connection
1
8
3
10
5
12
7
14
9
16
11
18
13
20
15
22
17
24
19
2
21
23
4
6
Front connection
8
3
A.MUMTHAJ,AP/ EEE
EMD
Page 9 2
10
5
12
7
14
9
16
11
18
13
20
15
22
17
24
19
2
21
4
23
6
1
Winding table
1
11
19
8
3
18
2
10
13
21
5
20
4
12
15
23
7
14
22
6
9
17
16
24
1
lap winding
no of brush = no of poles
In this winding there will be four brushes and in this four brushes two will be
positive and two will be negative.
On observing the currents entering at the commutator segments we can place positive
brushes at segments 4 and 10
In segments 4 and 10 the current enter the commutator segments.
In segments 1 and 7 the current leaves the commutator segments .hence negative
brushes can be placed at segments 1 and 7.
+ve
A.MUMTHAJ,AP/
EEE
EMD
-
Ve
Page 9 3
Place of +ve brush
place of –ve brush
……………………………………………………………………………………………………………….
P6) Draw the winding diagram for a 4-pole, 13 slots, simplex wave connected dc
generator with a commutator having 13 segments. The number of coil sides per
slot is 2. Indicate the position of brushes.
Number of coils = number of commutator segments
No of commutator segments = 13
Pole =4
No of coils C= 13
No of coil sides = 2C= 2*13 = 26
Coil sides per slot = no of coil sides / no of slots
= 26 / 13
A.MUMTHAJ,AP/ EEE
EMD
Page 9 4
Coil sides per slots = 2
No of coil sides per pole = no of coil sides / no of poles = 26 / 4 = 6.5
6+6+7+7 = 12+14 = 26 – no of coil sides
Step I
Representation of poles
Step II
Representation of coil sides
A.MUMTHAJ,AP/ EEE
EMD
Page 9 5
Top coil sides represented by odd number
Bottom side represented by even number
Step III
Representation of direction of current
Under north pole marked - upwards
Under south pole marked - downward
Winding pitches
Back pitch Yb = 2C
+K
P
= (2*13/4) +K = 6.5K
Let K = 0.5
Yb = 6.5+0.5 = 7 coil sides
Commutator pitch
Yc= C+1 / (p/2) = 13+1 / (4/2) = 7
Winding pitch
A.MUMTHAJ,AP/ EEE
EMD
Page 9 6
Y = 2Yc ; Y = Yb+Yf
Front pitch Yf = Y –Yb
= 2Yc-Yb = 2*7-7
Yf = 7
Bottom coil side of the first coil (back connection) =top coil side of first coil +back
pitch
= 1+Yb = 1+7 = 8
Top coil side of the coil lying one pole pitch from first coil (front connection) = bottom
coil side of first coil + front pitch
= 8+Yf
= 8+7 = 15
Winding calculations
1+7= 8
8+7=15
15+7=22
22+7=29-26=3
3+7=10
10+7=17
17+7=24
24+7=31-26=5
5+7=12
12+7=19
19+7=26
26+7=33-26=7
7+7=14
14+7=21
21+7=28-26=2
A.MUMTHAJ,AP/ EEE
EMD
Page 9 7
2+7=9
9+7=16
16+7=23
23+7=30-26=4
4+7=11
11+7=18
18+7=25
25+7=32-26=6
6+7=13
13+7=20
20+7=27-26=1
Back connection
front connection
1
8
8
15
15
22
22
3
3
10
10
17
17
24
24
5
5
12
12
19
19
26
26
7
7
14
14
21
21
2
2
9
9
16
16
23
23
4
14
11
11
18
18
25
6
6
13
20
20
25
13
1
In simplex wave winding the number of brushes are always two.
A.MUMTHAJ,AP/ EEE
EMD
Page 9 8
……………………………………………………………………………………………………………….
A.MUMTHAJ,AP/ EEE
EMD
Page 9 9
UNIT III
TRANSFORMER
Constructional details-Classification – output equation - Core section - Window
dimensions - Yoke dimension - Overall dimension - Determination of number of
turns and length of mean turns of windings- Resistance of windings- Leakage
reactance- No load current calculation – Regulation, losses and efficiency.
3.1 CONSTRUCTIONAL DETAILS
Fig (3.1) Constructional Details Of Transformer
3.2 OUTPUT EQUATION OF SINGLE PHASE TRANSFORMER
Output equation
The equation which relates the rated KVA output of a transformer to the area of core
and window is called output equation .
Output KVA depends - flux density (core area ) – ampere turns (window area)
Cross section of core type single phase transformer
A.MUMTHAJ,AP/ EEE
EMD
Page 1 0 0
Cross section of shell type single phase transformer
Fig (3.1 ) cross section view of single phase transformer
The induced emf in a transformer
E = 4.44fФmT volts
Emf / turn = E / T = 4.44 fФm
Window space factor
Kw = conductor area in window / total area of window
Kw =Ac / Aw
----------------------------------------------------(1)
Conductor area in window
Ac= AwKw
------------------------------------------------------(2)
A.MUMTHAJ,AP/ EEE
EMD
Page 1 0 1
Current density δ is same in both the windings
Current density δ = Ip / ap = Is / as --------------------------(3)
Area of cross section of primary conductor
ap=Ip / δ -----------------------------------------------------(4)
Area of cross section of secondary conductor
as=Is / δ
--------------------------------------------------(5)
if we neglect magnetizing mmf then primary ampere turns is equal to secondary
ampere turns
Ampere turns,AT = IpTp = IsTs ----------------------------------(6)
Total copper area in window Ac = copper area of py wdg + copper area of sy wdg
= no of py turns*area of cross section + no of turns
Of py wdg
*area of cross
section of sy wdg
= Tpap+Tsas
= Tp Ip / δ
+ Ts Is / δ
= 1 / δ ( TpIp+TsIs)
= 1/δ ( AT+AT)
Ac
= 2AT / δ ---------------------------(7)
Equating eqn (2) and (7)
KwAw = 2AT \ δ
Ampere turns ,AT = KwAwδ / 2
KVA rating of single phase transformer is given by Q = VpIp*10-3
Q = EpIp*10-3
Multiply and divide by Tp
= Ep / Tp *TpIp*10-3
Q = Et*AT*10-3 -----------(8)
Substituting
A.MUMTHAJ,AP/ EEE
EMD
Page 1 0 2
Et = 4.44fФm
AT = KwAwδ / 2
Q = 4.44 fФmKwAwδ / 2 *10-3
Q = 2.22 f ФmKwAwδ*10-3
Q = 2.22 f BmAiKwAwδ*10-3
…………………………………………………………………………………………………………
3.3 OUTPUT EQUATION OF THREE PHASE TRANSFORMER
Fig (3.3 ) cross section view of three phase transformer
The induced emf in a transformer
E = 4.44fФmT volts
Emf / turn = E / T = 4.44 fФm
In case of three phase transformer ,each window has two primary and two
secondary winding
Window space factor
Kw = conductor area in window / total area of window
Kw =Ac / Aw
----------------------------------------------------(1)
Conductor area in window
Ac= AwKw
------------------------------------------------------(2)
Current density δ is same in both the windings
Current density δ = Ip / ap = Is / as --------------------------(3)
Area of cross section of primary conductor
A.MUMTHAJ,AP/ EEE
EMD
Page 1 0 3
ap=Ip / δ -----------------------------------------------------(4)
Area of cross section of secondary conductor
as=Is / δ
--------------------------------------------------(5)
if we neglect magnetizing mmf then primary ampere turns is equal to secondary
ampere turns
Ampere turns,AT = IpTp = IsTs ----------------------------------(6)
Total copper area in window Ac = copper area of py wdg + copper area of sy wdg
= 2*no of py turns*area of cross section + 2*no of turns
Of py wdg
*area of cross
section of sy wdg
=2 Tpap+2Tsas
= 2Tp Ip / δ
+ 2Ts Is / δ
= 2 / δ ( TpIp+TsIs)
= 2/δ ( AT+AT)
Ac
= 4AT / δ ---------------------------(7)
Equating eqn (2) and (7)
KwAw = 4AT \ δ
Ampere turns ,AT = KwAwδ / 4
KVA rating of single phase transformer is given by Q = 3VpIp*10-3
Q = 3EpIp*10-3
Multiply and divide by Tp
= 3 (Ep / Tp *TpIp*10-3
Q = 3 Et*AT*10-3 -----------(8)
Substituting
Et = 4.44fФm
AT = KwAwδ / 4
A.MUMTHAJ,AP/ EEE
EMD
Page 1 0 4
Q = 3 *4.44 fФmKwAwδ /4 *10-3
Q = 3.33 f ФmKwAwδ *10-3
Bm = Фm / At ; Фm= Bm*At
Q = 3.33 f Bm AtKwAwδ *10-3
……………………………………………………………………………………………………………
3.4 Emf per turn
The transformer design starts with selection of an appropriate value for emf per turn
Et = 4.44fФm
Et =K√Q
K =√4.44 f (Фm/AT) *103
K depends type , service condition , method of construction of transformer
Q – KVA rating for single phase transformer
Q –KVA / phase for three phase transformer
-------------------------------*---------------------------------------------
3.5 DESIGN OF CORES
A.MUMTHAJ,AP/ EEE
EMD
Page 1 0 5
Fig (3.5 ) Types Of Transformer Core
For core type transformer the cross-section may be
(i)
Rectangular
(ii)
Square
(iii)
Stepped
For shell type transformer
The cross section may be rectangular ,when rectangular cores are used the coils are also
rectangular in shape .
In core type transformer with rectangular core the
Ratio of depth / width = 1.4 to 2
In shell type transformer
Rectangular cores the width of the central limb is 2 to 3 times the depth of the core.
Square core
d- diameter and diagonal of the square core
a – side of square
Diameter of core / circle
d=√a2+a2
d=√2a2
d=√2 * a
A.MUMTHAJ,AP/ EEE
EMD
Page 1 0 6
side of square a=d / √2
gross core area Agi = area of square
a2=(d / √2)2
a2 = 0.5d2
stacking factor = Sf= 0.9
net core area Ai =stacking factor*gross core area
= 0.9 * 0.5d2
Ai = 0.45d2
Area of circle = πd2 / 4
The ratio =net core area /area of circle = 0.58
The ratio = gross core area /area of circle = 0.64
Core area factor Kc = net core area / square of circumscribing circle (dia of circle)
= 0.45d2 /d2
Kc= 0.45
3.5.1 TWO STEPPED CORE / CRUCIFORM CORE
a-length of the rectangular
b-breath of the rectangular
d-diameter of the rectangular
A.MUMTHAJ,AP/ EEE
EMD
Page 1 0 7
θ-Angle between the ddaginal and length of the rectangular
Agi =0.618d2
Sf= 0.9
Ai = 0.9*0.618d2
Ai =0.56d2
The ratio =net core area /area of circle = 0.71
The ratio = gross core area /area of circle = 0.79
Core area factor Kc = net core area / square of circumscribing circle (dia of circle)
= 0.56d2 /d2
Kc= 0.56
3.5.2 Ratio of area of core and circumscribing circle
3.6 Choice of flux density in the core
Flux density decides –area of cross section of core and core loss
Higher value of flux density –small core area ,lesser cost ,reduction in length of mean
turn of wdg ,higher iron loss,large magnetizing current.
Choice of flux density depends
1.service condition (distribution / power T/F)
2. materials used for laminations of core
Laminations are made up of
cold rolled silicon steel (higher flux density )
A.MUMTHAJ,AP/ EEE
EMD
Page 1 0 8
Hot rolled silicon steel (low flux density)
When hot rolled silicon steel is used for laminations
Bm =1.1 to 1.4 wb/m2 - for distribution T/F
Bm = 1.2 to 1.5 wb/m2 - for power T/F
When cold rolled silicon steel is used for laminations
Bm = 1.55 wb/m2 -T/F with voltage rating up to 132KV
Bm = 1.6 wb/m2 - T/F with voltage upto 132KV to 275KV
Bm = 1.7 Wb/m2 - 275KV to 400KV
---------------------------*--------------------------------------------
3.7 OVER ALL DIMENSION OF THE TRANSFORMER
The main dimensions of the transformer are
(i)
Height of window(Hw)
(ii)
Width of the window(Ww)
The other important dimensions of the transformer are
A.MUMTHAJ,AP/ EEE
(i)
width of largest stamping(a)
(ii)
(iii)
diameter of circumscribing circle
distance between core centres(D)
(iv)
(v)
height of yoke(Hy)
depth of yoke(Dy)
(vi)
overall height of transformer frame(H)
(vii)
overall width of transformer frame(W)
EMD
Page 1 0 9
Fig (3.7 ) Over All Dimension Of single phase core type The
Transformer
A.MUMTHAJ,AP/ EEE
EMD
Page 1 1 0
3.8 DESIGN OF WINDINGS
Transformer consist of High voltage winding and low voltage winding
Design of wdg involves the determination of number of turns and area of cross section of the
conductor used for wdg.
Number of turns = using voltage rating and emf per turns.
The area of cross section – using rated current and current density
Number of turns in low voltage winding TLV = VLV / Et or AT / ILV
Number of turns in high voltage winding THV = TLV * VHV / VLV
Where
VLV = Rated voltage of low voltage winding
ILV = Rated current of low voltage winding
VHV = Rated voltage of high voltage winding
In step up T/F
TLV = Tp
VLV = Vp
THV = Ts
VHV = Vs
In step down T/F
THV = Tp
VHV = Vp
TLV = Ts
VLV = Vs
Rated current in a winding = KVA per phase *10-3 / voltage rating of the winding
The area of cross section of primary and secondary winding conductors are estimated by
assuming a current density
A.MUMTHAJ,AP/ EEE
EMD
Page 1 1 1
The choice of current density(δ) depends on the allowable temperature rise , copper
loss,method of cooling .
δ for various types of T/F
δ =1.1 to 2.2 A/mm2 for distribution T/F
δ = 1.1 to 2.2 A/mm2 for small power T/F with self oil cooling.
δ =2.2 to 3.2 A/mm2 for large power transformer with self oil cooling or air blast .
δ=5.4 to 6.2 A/mm2 for large power T/F with forced circulation of oil or with water
cooling coils.
Area of cross section of primary winding conductor ap=Ip / δ
Area of cross section of secondary winding conductor as=Is / δ
---------------------------------*------------------------------------------------------------
3.9 COOLING OF TRANSFORMERS
Losses developed in the transformer core and windings are converted into thermal energy and
causes heating of corresponding transformer parts .
The heat dissipation in transformer occurs by conduction, convection and radiation
3.9.1 Methods of cooling transformer are
1. Air natural
2. Air Blast
3. Oil natural
4. Oil natural air forced
5. Oil natural water forced
6. Forced circulation of oil
7. Oil forced air natural
8. Oil forced air forced
9. Oil forced water forced
A.MUMTHAJ,AP/ EEE
EMD
Page 1 1 2
The transformers are provided with cooling tubes to increase the heat
dissipating area. The tubes are mounted on the vertical sides of the
transformer tank. But the increase in dissipation of heat is not proportional
increase in area, because the tubes would screen some of the tank surface
preventing radiations from the screened surface. On the other hand the tubes
will improve the circulation of oil. This improves the dissipation of loss by
convection. The circulation of oil is due to more effective pressure heads
produced by columns of oil in tubes.
Natural cooling is suitable up to 10MVA
Forced oil and air circulation are employed for transformers of capacities 30MVA
Forced oil and water is used for T/F designed for power plants .
3.9.2 T/F oil as a cooling medium
For the T/F oil,the specific heat dissipation due to convection of oil is given by
Λ conv = 40.3 (θ/H)
¼
W/m2-˚C
Θ-temp difference of the surface relative to oil ˚C
H – height of dissipating surface ,m
3.9.3 Temperature Rise in plain walled tanks
The T/F core and wdg assembling is placed inside a container called tank.
The walls of tank dissipated heat by both radiation and convection
For a temp rise of 40˚C above the ambient temp of 20˚C ,the specific heat dissipation are as
follows
1. Specific heat dissipation due to radiation
λrad =6 W/m2-˚C
2. Specific heat dissipation due to convection
λcon=6.5 W/m2-˚C
Total specific heat dissipation in plain walled tank is 12.5 W/m2-˚C
The temperature rise
θ= total loss / specific heat dissipation *heat dissipating surface of the tank
A.MUMTHAJ,AP/ EEE
EMD
Page 1 1 3
θ=Pi+Pc / 12.5St
Pi= Iron loss
Pc=copper loss
St -heat dissipating surface of the tank
------------------------------------*_---------------------------------------------------3.10 DESIGN OF TANK WITH COOLING TUBES
Functions of cooling tubes
Cooling tubes used to increase the heat dissipating area
Tubes are mounted on the vertical sides of the T/F tank
Tubes will improve the circulation of oil
Let
The dissipating surface of the tank = St
The dissipating surface of the tubes =XSt
Loss dissipated by surface of the tank by radiation and convection = (6+6.5)St
=12.5 St
Loss dissipated by tubes by convection
= 6.5 * 135 / 100*XSt
= 8.8 XSt
Total loss dissipated by walls and tubes
= 12.5 St +8.8 X St
= (12.5+8.8X) St
Actual total area of tank walls and tubes
= St+XSt
= St(1+X)
Loss dissipated per m2 of dissipating surface
= total loss dissipated / total
area
= St(12.5+8.8X) / St(1+X)
= 12.5 +8.8X / (1+X)
A.MUMTHAJ,AP/ EEE
EMD
Page 1 1 4
θ
Temperature rise in T/F with cooling tubes
= total loss / loss dissipated
Total loss ,Ploss = Pi+Pc
θ
= Pi+Pc / St(12.5+8.8X)
(or)
12.5+8.8X
X
Total area of cooling tubes
= Pi+Pc / θSt
={ [Pi+Pc / θSt] -12.5}*(1/8.8)
=XSt
= (1/8.8) [Pi+Pc / θSt - 12.5 ]St
= (1/8.8) [Pi+Pc / θ - 12.5St ]
Surface area of each tube = π dt lt
lt-length of the tube
dt-diameter of the tube
Total number of tubes nt = total area of tubes / area of each tubes
nt=1/ 8.8 πdtlt
* [Pi+Pc/θ - 12.5 St]
standard diameter of the cooling tubes – 50mm
length of the tubes depends in the height of the tank
tubes are arranged with a centre to centre spacing of 75mm
--------------------------------------------*------------------------------------------------------3.11 DIMENSIONS OF TANK
A.MUMTHAJ,AP/ EEE
EMD
Page 1 1 5
Fig (3.11) Over All Dimension Of The Transformer
A.MUMTHAJ,AP/ EEE
EMD
Page 1 1 6
C1= clearance between wdg and tank along the width
C2 = clearance between the winding and tank along the length
C3 =clearance between the T/F frame and the tank at the bottom
Doc =outer diameter of coil
Width of the tank
WT = 2D+Doc+2C1 for three phase
WT =D+Doc +2C1 for single phase
Length of the tank
LT = Doc +2C2
Height of the tank
HT =H+C3+C4
Clearance between T/F frame and tank
Clearance in mm
Voltage
KVA rating
C1
C2
C3
C4
Up to 11KV
<1000 KVA
40
50
75
375
UP TO 11KV
1000 TO 5000 KVA
70
90
100
400
11KV TO 33KV
< 1000 KVA
75
100
75
450
11KV TO 33KV
1000 TO 5000 KVA
85
125
100
475
------------------------------------*-------------------------------------------------------
A.MUMTHAJ,AP/ EEE
EMD
Page 1 1 7
PROBLEMS
P1 ) Calculate the core and window areas required for a 1000 KVA, 6600/400 V,
50 Hz, and single phase core type transformer. Assume a maximum flux density
of 1.25 Wb/m2 and a current density of 2.5 A/mm2.
Voltage/turn = 30 V.
Window space factor = 0.32
Given Data
1-phase Core type
T/F KVAn = 1000KVA
f = 50 Hz
Maximum flux density Bm= 1.25 Wb/m2
Primary voltage Vp = 6600V
Secondary voltage Vs= 400 V
Current density = 2.5 A/mm2
Voltage per turn Et = 30 V
Window space factor Kw = 0.32
To find
Core area Ai
Window Area Aw
Formula
Core area
Flux density Bm= Фm / Ai
Ai = Фm / Bm
Window area = Q = 2.22f Bm Ai Kw Aw δ*10-3
Aw = Q / 2.22f Bm Ai Kw δ*10-3
Soln
To find Фm
Emf per turn Et = 4.44 f Фm
Фm= Et / 4.44 f
Фm = 30 / 4.44*50
Фm = 0.1351wb
Bm= Фm / Ai
A.MUMTHAJ,AP/ EEE
EMD
Page 1 1 8
Ai = Фm / Bm = 0.1351 / 1.25
Net area of cross section of core Ai = 0.108m2 = 0.108*106mm2
To find Aw
Aw = Q / 2.22f Bm Ai Kw δ*10-3
= 1000 / 2.22*50*1.25*0.108*0.32*2.5*106*10-3
Aw = 0.0834m2
Window area ,Aw = 0.0834*106mm2
Result
Net core Area, Ai = 0.108 m2 = 0.108 x 106 mm2
Window Area, Aw = 0.0834 m2 = 0.0834 x 106 mm2
……………………………………………………………………………………………………………….
P2) Estimate the main dimensions including winding conductor area of a
3=phase, -y core type transformer rated at 300 KVA, 6600/440 V, 50 Hz.
A
suitable core with 3-steps having a circumscribing circle of 0.25 m diameter and
a leg spacing of 0.4 m is available.
Emf/turn = 8.5V, =2.5 A/mm2 Kw=0.28,
Sf=0.9 (stacking factor).
Given Data
3=phase, - y , Core type T/F , 3-stepped core
KVA rating = 300 KVA
6600/440V
50 Hz
Et = 8.5 V
= 2.5 A/mm2
d = 0.25m
Kw = 0.28
leg spacing = 0.4 m ; Sf = 0.9
To find
Main dimensions (Tp,Ts) , (ap,as),Ai,Aw,Hw,Ww
A.MUMTHAJ,AP/ EEE
EMD
Page 1 1 9
Formula
Number of secondary turns per phase Ts = Es / Et
Number of primary turns per phase Tp = Ts *(Vp / Vs)
To find number of secondary turns per phase
Here secondary is star connected
Secondary voltage per phase Vs = 440 / √3
Vs = 254V
Es~Vs
No of secondary turns per phase
Ts = Es / Et = 254/8.5
Ts = 29.8 ~30 turns
No of primary turns per phase
Tp = Ts*(Vp/Vs)
Tp = 30 * (6600 / 254)
Tp = 779.5~780 turns
The area of cross section of primary conductor ap = Ip / δ
Primary is delta connected
The phase current on primary
Ip = ILP / √3
KVA rating of transformer Q= √3VLPILP*10-3 --------------(1)
Q = √3VLSILS*10-3 ------------(2)
VLP – Line voltage on primary
VLS – Line voltage on secondary
A.MUMTHAJ,AP/ EEE
EMD
Page 1 2 0
ILP – Line current on primary
ILS – Line current on secondary
ILP = Q / √3*VLP*10-3
ILP = 300 / √3*6600*10-3
ILP = 26.24A
The phase current on primary
Ip = ILP / √3
Ip = 26.24 /√3
Ip = 15.15A
The area of cross section of primary conductor ap = Ip / δ
ap=15.15 / 2.5
ap=6.06mm2
ILS = Q / √3VLS*10-3
ILS = 300 / √3*400*10-3
ILS = 393.65A
In secondary star connection
ILS = Is
The area of cross section of secondary conductor as = Is / δ
as=393.65 / 2.5
as=157.5mm2
window area
Aw = Ac/ Kw
The copper area in window
A.MUMTHAJ,AP/ EEE
EMD
Page 1 2 1
Ac = 2(apTp+asTs)
Ac = 2(6.06*780+157.5*30)
Ac = 18903.6mm2
Aw = 18903.6 / 0.28
Aw = 67512.86mm2 = 67512.8*10-6m
Net core area Ai
Ai = Sf*Agi
For 3 stepped core,the ratio = gross core area / area of circumscribing circle = 0.84
Area of circumscribing circle = πd2 / 4
= π*(0.25)2 / 4
= 0.049m2
Gross core area Agi = 0.84*0.049
Agi =0.041m2
Ai = Sf*Agi
Ai = 0.9 *0.041
Ai = 0.0369m2
Ai = 0.037*106mm2
Given that ,leg spacing =0.45m
Leg spacing = width of window
Width of window Ww = 0.45m
Height of window
Hw = Aw / Ww
Hw = 67512.86*10-6 / 0.45
A.MUMTHAJ,AP/ EEE
EMD
Page 1 2 2
Hw = 0.15m
Result
Number of primary turns/phase,
Tp= 776
Number of secondary turns/phase
Ts= 30
Area of cross-section of primary conductor,
ap= 6.06 mm2
Area of cross-section of secondary conductor,
as= 157.5 mm2
Net core area,
Ai= 0.0369 m2
Window area,
Aw= 0.067 m2
Height of window,
Hw= 0.15 m
Width of window,
Ww= 0.45 m
……………………………………………………………………………………………………………….
P3) Determine the dimensions of core and window for a 5 KVA, 50 Hz, 1-phase,
core type transformer. A rectangular core is used with long side twice as long as
short side. The window height is 3 times the width. Voltage per turn = 1.8 V.
Space factor = 0.2, = 1.8 A/mm2, Bm = 1 Wb/m2
Given data
Q = 5KVA ,1-phase core type Rectangular core
f=50Hz
long side = 2*short side
Hw= 3Ww
Et = 1.8V
Kw = 0.2
δ=1.8A/mm2
Bm=1wb/m2
A.MUMTHAJ,AP/ EEE
EMD
Page 1 2 3
To find
Dimension of the core axb = ?
Dimension of the window HwxWw=?
Soln
Hw
Ww
b
a
Et= 4.44fФm
Фm = Et / 4.44f
= 1.8 / 4.44*50
Фm= 0.0081wb
Net core area = Ai = Фm / Bm
Ai = 0.0081 /1
Ai = 0.0081m2
Cross section of the core is rectangle
Agi = length *breath
Agi = a*b
Gross core area Agi = Ai / Sf
[ Ai = Sf*Agi , Agi = Ai / Sf]
Agi = 0.0081 / 0.9
Agi = 0.009m2
Agi = axb given that a= 2b
Agi = 2bxb
Agi = 2b2
b2=Agi/ 2
b= 0.067m
a = 2b = 2*0.067 = 0.134m
A.MUMTHAJ,AP/ EEE
EMD
Page 1 2 4
KVA rating of single phase transformer
Q = 2.22*f*Bm*Ai*Kw*Aw*δ*10-3
Aw = Q / 2.22*f*Bm*Ai*Kw*δ*10-3
Aw = 5 / 2.22*50*1*0.0081*0.2*1.8*106*10-3
Aw = 0.0154m2
Window area
Aw = Hw*Ww
Given that Hw = 3Ww
Aw = 3Ww*Ww = 3Ww2
Ww = √Aw/3 = √0.0154 /3
Ww = 0.0716m
Hw = 3*0.0716 = 0.2148m
Result
The net core area, At
= 0.0081 m2
The dimensions of the core, a x b = 0.134 x 0.067 m
The window area, Aw,
= 0.0154 m2
The dimensions of window, Hw x Ww
= 0.2148 x0.0716 m
……………………………………………………………………………………………………………….
P4) The tank of 1250 KVA, natural oil cooled transformer has the dimensions
length, width and height as 0.65 x 1.55 x 1.85 m respectively. The full load loss
= 13.1 KW, loss dissipation due to radiations = 6 W/m2-0C, loss dissipation due to
convection = 6.5 W/m2-0C, Improvement in convection due to provision to tubes
= 40 %, Temperature rise = 400C, Length of each tube = 1 m, Diameter of tube =
50 mm.
Find the number of tubes for this transformer.
Neglect the top and
bottom surface of the tank as regards the cooling.
Given data
KVA = 1250KVA
Tank dimension = lengthxwidthxheight
= 0.65x1.55x1.85
Full load loss = 13.1KW
λrad=6W/m2-˚c
A.MUMTHAJ,AP/ EEE
EMD
Page 1 2 5
λconv = 6.5 W/m2-˚c
improvement in cooling =40%
θ = 40˚c
lt=1m
dt=50mm
To find
Number of tubes
Formula
Total no of cooling tubes = total area of tubes / area of each tubes
Soln
Tank dimension
Lt = length = 0.65m
Wt = width = 1.55m
Ht = Height = 1.85m
Heat dissipating surface of tank St = Area of vertical sides
= 2(LtHt+WtHt)
= 2Ht(Lt+Wt)
= 2*1.85*(0.65+1.55)
St = 8.14m2
Loss dissipated by tank walls by Radiation and convection = (6+6.5)St
= 12.5St
Heat dissipating area of tubes = XSt
Loss dissipated by cooling tubes due to convection = 6.5*140 / 100 *XSt
A.MUMTHAJ,AP/ EEE
EMD
Page 1 2 6
= 9.1XSt
Total loss dissipated by tank and tubes = 12.5St+9.1XSt
= St(12.5+9.1X)
Temperature rise in transformer with cooling tubes = total loss / total loss dissipated
Total loss = Ploss = 13.1KW = 13.1*103W
θ = 13.1*103 / St(12.5+9.1X)
12.5+9.1X = 13.1*103 / θSt
X = 1 / 9.1 [13.1*103/θSt – 12.5]
X = 1/9.1[13.1*103/40*8.14-12.5]
X = 3.0476
Total area of tubes XSt
= XSt
= 3.04*8.14
Total area of tubes
= 24.8075m2
Area of each tubes = πdtlt
= π*50*10-3*1
Area of each tube = 0.157m2
Total number of cooling tubes = 24.8075 / 0.157
Total number of cooling tubes = 158 tubes
Diameter of the tube is 50mm
Distance between the tube is half of the diameter
Let distance between tubes = 25mm
Width of the tank is 1550mm,if we leave spacing of 62.5mm on either sides then we
can arrange 20 tubes widthwise with spacing of 75mm between centres of tubes.
A.MUMTHAJ,AP/ EEE
EMD
Page 1 2 7
On length of the tank is 650mm,if we leave 62.5mm on either sides then we can
arrange 8 tubes with same spacing
Plan of the cooling tubes
……………………………………………………………………………………………………………….
3.12 Estimation of No load current of Transformer
No load current - 1. Magnetizing component
2. Loss components
Magnetizing components depends on the mmf required to establish the desired flux.
The loss component of no load current depends on the iron loss.
Ly
Lc
lc
ly
A.MUMTHAJ,AP/ EEE
EMD
Page 1 2 8
No load current of single phase transformer
Total length of core = 2lc
Total length of yoke = 2ly
lc=Hw = height of window
ly=Ww = width of window
mmf for core = mmf per meter for maximum flux density in core * total length of core
= atc*2lc
Mmf for core = 2atclc
Mmf for yoke = mmf per metre for maximum flux density in yoke * total length of yoke
= aty*2ly
Mmf for yoke = 2 atyly
Total magnetizing mmf ATo = mmf for core +mmf for yoke +mmf for joints
ATo = 2atclc+2atyly+mmf for joints
Maximum value of magnetizing current
= ATo / Tp
Magnetizing current is sinusoidal then ,
RMS value of magnetizing current
Im = ATo / √2*Tp
Magnetizing current is not sinusoidal then,
Im = ATo / KpkTp ; Kpk - peak factor
The loss component of no load current Il=Pi / Vp
Pi = iron loss
A.MUMTHAJ,AP/ EEE
EMD
Page 1 2 9
Vp = terminal voltage of primary winding
Iron loss are calculated by finding the weight of core and yokes.
No load current Io =√Im2+Il2
………………………………………………………………………………………………………..
3.13 No load current of three phase transformer
Ly
Lc
lc
Total length of core = 3lc
lc
ly
Total length of yoke = 3ly
mmf for core = mmf per meter for maximum flux density in core * total length of core
= atc*3lc
Mmf for core = 3atclc
Mmf for yoke = mmf per metre for maximum flux density in yoke * total length of yoke
= aty*2ly
Mmf for yoke = 2 atyly
Total magnetizing mmf ATo = mmf for core +mmf for yoke +mmf for joints
ATo = 3atclc+2atyly+mmf for joints
Total magnetizing mmf per phase = ATo = 3atclc+2atyly+mmf for joints / 3
Maximum value of magnetizing current
= ATo / Tp
Magnetizing current is sinusoidal then ,
A.MUMTHAJ,AP/ EEE
EMD
Page 1 3 0
RMS value of magnetizing current
Im = ATo / √2*Tp
Magnetizing current is not sinusoidal then,
Im = ATo / KpkTp ; Kpk - peak factor
Total iron loss for 3-phase transformer, Pi = 3VpIl
Vp = terminal voltage of primary winding
Loss components of no load current
Il = Pi / 3Vp
No load current Io =√Im2+Il2
--------------------------------*-------------------------------------------------------------------
A.MUMTHAJ,AP/ EEE
EMD
Page 1 3 1
UNIT - IV
INDUCTION MOTORS
Three phase Induction Motor: Constructional details - Output equation - Choice
of specific loadings - Design of stator, squirrel cage rotor, windings and
slots - Calculation of circuit parameters - No load current - efficiency and
temperature rise from design data. Single phase Induction Motor: Design of
running and starting windings for capacitor start induction motor.
Consists of
-
Construction
-
Output equation
-
Choice of loadings
-
Main dimensions
-
Stator winding
-
Stator core
-
Length of airgap
-
Choice of rotor slots
Design of Squirrel cage
rotor
-
Design of Wound rotor
4.1 CONSTRUCTINAL DETAILS
Consists of two major parts
.
(i)Stator
(ii)Rotor
Stator consists of
(i)Core
(ii)Winding
Rotor is of two types
(i)Squirrel cage
(ii )Wound rotor
Squirrel cage rotor consists of
(i)core
ii)copper or aluminium bars
(iii)end rings
Wound rotor consists of
(i)core
(ii)winding
(iii)slip rings & brushes
Fig (4.1 ) Induction Machine
4.2 Separation of D and L for induction motors
The operating characteristics of an induction motor are mainly influenced by the ratio L /.
The ratio of L / for various design features are listed below
For minimum cost L /
= 1.5 to 2
For good power factor L /
= 1.0 to 1.25
For good efficiency L /
= 1.5
For good over all design L /.
= 1.0
Generally L / lies between 0.6 to 2
= √0.18L
--------------------------------------------------------------------------------------------------------------------
4.3 CHOICE OF SPECIFIC LOADINGS
The value of output coefficient depends upon the choice of specific electric loading(ac)
& specific magnetic loading(Bav).
Choice of specific electric loading depends on
1. copper loss
2. Temperature rise
3. Voltage rating
4. Overload capacity
Choice of specific magnetic loading depends on
1. Power factor
2. iron loss
3. overload capacity
--------------------------------------*---------------------------------------------4.4 CHOICE OF SPECIFIC ELECTRIC LOADING
A large value of ‘ac’ results in higher copper losses & higher temperature rise. For
machines with high voltage rating smaller values of ‘ac’ should be prepared. Since for
high voltage machines the space required for insulation is large.
For high overload capacity, lower values of ‘ac’ should be selected. Since large values
of ‘ac’ results in large number of turns per phase, leakage reactance will be high. Large
values of leakage reactances results in reduced overload capacity.
It also depends upon size of motor and loading .
It varies between 5000 to 45000 amp.cond/m
-------------------------------*----------------------------------------------------------
4.5 CHOICE OF SPECIFIC MAGNETIC LOADING
Bav lies between 0.3 to 0.6 wb/m2
For machines
Cranes rolling mills Bav = 0.65 wb/m2
With large values of Bav, the magnetizing current will be high, which results in poor
power factor. However in induction motors the flux density in the airgap should be
such that there is no saturation in any part of the magnetic circuit.
A large value of Bav results in increased iron loss & decresed efficiency. With higher
values of Bav higher values of over load capacity can be obtained. Since the higher
Bav provides large values of flux per pole, the turns per phase, will be less & so the
leakage reactance will be less. Lower value of leakage reactance results in higher over
load capacity.
------------------------------------------*-------------------------------------------------------
4.6 MAIN DIMENSION
The main dimensions of induction motor are the diameter of stator bore,D & the
length of stator core,L.
In induction motors most of the operating characteristics are decided by L/ ζ ratio of
the Motor.
L/ ζ ratio
For minimum cost
1.5 to 2
For good power factor
1 to 1.25
For good efficiency
For good overall design
1.5
1
------------------------------------------------------------------------------------------4.7 Stator winding
For small motors upto 5HP, single layer windings like mush Winding, whole coil
concentric winding & bifurcated concentric winding are employed.
.
For large capacity machines, double layer windings(either lap or wave winding) are
employed with diamond shaped coils.
Stator turns per phase
The turns per phase Ts, can be estimated from stator phase voltage and maximum
flux in the core. The maximum flux(φm) in thecore can be estimated from Bav,D,L and
p.
Bav = pφm/ӅDL
Stator turns per phase = Es/(4.44*Kws*f*φm)
Es= Stator phase voltage
---------------------------------------------------------------------------------------------------------
4.8 Length of mean turn
The Length of mean turn for voltage upto 650 Vcan be calculated by
Length of mean turn = 2L+2.3 ζ +0.24 in m
-----------------------------------------------------------------------------------------------------------------4.9 Stator conductors
The area of cross section (as) of stator conductors can be estimated from the
knowledge of current density, KVA rating of the machine & stator phase voltage.
Current density in the stator wdg lies 3 to 5A/mm2
KVA rating of 3 phase machine
Q = 3EsIs*10-3
Es -stator phase voltage
Is – stator phase current
Q = 3IsEs*10-3
Stator phase current, Is = Q/(3Es*10-3)
as=Is/δs
as=Ӆds2/4
ds = √4as /π
δs – current density in stator conductors
as – Area of cross section of stator conductor
ds – diameter of stator conductors
if the diameter is more than 2 or 3mm bar or strip conductors are used.
----------------------------------------------------------------------------------------------------------
4.10 STATOR CORE
Fig (4.10) Stator slots
Stator core made up of laminations of thickness 0.5mm
The design of stator core involves
selection of number of slots,
estimation of dimensions of teeth
Depth of stator core.
Stator slots
Different types of slots are
1.open slots
2.semi enclosed slots
.
When open slots are used the winding coils can be formed and fully insulated before
installing & it is easier to replace the individual coils. Another advantage is that we
can avoid excessive slot leakage thereby reducing the leakage reactance
When semienclosed slots are used the coils must be taped & insulated after they are
placed in the slots. The advantages of semienclosed slots are less airgap contraction
factor giving a small value of magnetising current, low tooth pulsation loss & much
quieter operation.
In small motors round conductors are used and in large & medium size motors strip
conductors are used
---------------------------------------------------------------------------------------------------------
4.11 CHOICE OF STATOR SLOT
Number stator slots depends on
1.
2.
3.
4.
5.
6.
Tooth pulsation loss
Leakage reactance
Ventilation
Magnetizing current
Iron loss
Cost
stator slot pitch,yss = Gap surface/Total no. of stator slots
Ss -total stator slots
Ss = πD /Yss
Total no. of stator slots= Ss
Gap surface= ӅD
Total no. of stator slots(conductors ) = No. of phases*Conductors per phase
= 3*2Ts
Conductors per slot,Zss = Total no. of stator slots/Ss
Zss = 6Ts / Ss
Guide lines for selecting stator slots
Step (1)- the stator slot pitch various from 15mm to 25mm.calculate the range of
stator slots using the equation.
Stator slots Ss = πD /Yss
Minimum no of slots are obtained when Yss = 25mm
Maximum no of slots are obtained when Yss= 15mm
Step (2) stator slots should be multiple of q where q is slot /pole / phase
Ss = number of phases *poles * q
Step (3) select the choice of stator slots which are common between the values
obtained in step(1) and step(2)
Step (4)
the best choice of stator slots is given by the value of slots in the list
obtained from step(3) and satisfying the slot loading.
Slot loading = IzZss
Iz = current through a current
Zss = conductors per slots
----------------------------------------------------------------------------------------------------------
4.12 Area of stator slot
Area of each slot = Copper area per slot/space factor
= Zss*as/ space factor
Space factor vary from 0.25 to 0.4
After obtaining the area of the slot, the dimensions of the slot should be adjusted. The
slot should not be too wide to give a thin tooth.
----------------------------------------------------------------------------------------------------------
4.13 Stator teeth
Bts = 1.7 wb/m2 should not exceed this value
Bts - the mean flux density in stator tooth
Minimum teeth area per pole = φm/1.7
Teeth area per pole= (Ss/p)*Li*Wts
Minimum width of teeth, Wts= φm/(1.7*Ss/p*Li)
The minimum width of stator tooth is either near the gap surface or at one third
height of tooth from slot opening.
----------------------------------------------------------------------------------------------------------4.14 Depth of stator core
Fig (4.14) Cross Section Of Stator Core
The Depth of stator core depends on the flux density in the core.
Flux density lies between 1.2 to 1.5 wb/m2
Flux passing through the sector core is half of the flux per pole
Flux = Фm / 2
Depth of stator core dcs = φm/(2*Bcs*Li)
Bcs = Flux desity in stator core
Outer diameter of stator core
Do =D+2 (depth of stator slots +depth of core)
4.15 LENGTH OF AIR GAP
Length of air gap is decided by
1. Power Factor
2. Pulsation loss
3. Cooling
4. over load capacity
5. Unbalanced magnetic pull
6. Noise
For small IM
lg=0.2+2√DL in mm
lg=0.125+0.35D+L+0.015Va mm
lg=0.2+D in mm
lg=1.6√D-0.25 mm
--------------------------------------------------------------------------------------------------------4.16 CHOICE OF ROTOR SLOTS
With certain combination of stator and rotor slots, the following problems may develop
in the induction motor.
1.The motor may refuse to start
2.The motor may crawl at some subsynchronous speed
3.Severe vibrations are developed & so the noise will be excessive
The above effects are due to harmonic magnetic fields
developed in the machine. The harmonic fields are due to
1.winding
2.slotting
3.saturation
4.irregularities in air gap
The harmonic fields are superposed upon the fundamental sinewave field & induce
emfs in the rotor windings & thus circulate harmonic currents. These harmonic
currents in turn interact with the harmonic fields to produce harmonic torques.
Harmonic induction torque
Harmonic induction torqueses are torques produced by harmonic fields due to stator
winding and slots.
Harmonic synchronous torque
Harmonic synchronous torque are torques produced by the combined effect of same
order of stator & rotor harmonic fields.
Crawling
Crawling is a phenomenon in which the induction motor runs at a speed lesser than
subsynchronous speed.
Cogging
Cogging is a phenomenon in which the induction motor refuses to start.
----------------------------------------------------------------------------------------------------------
4.17 DESIGN OF SQUIRREL CAGE ROTOR
.
It consists of
1.laminated core
2.Rotor bars
3.End rings
The teeth being cantilevers respond to varying forces and set into vibrations. Thus
noise is produced.
Diameter of rotor,Dr=D-2lg;
lg-length of air gap
Design of rotor bars & slots
Rotor bar current is given by Ib=(6*Is*Ts*Kws*Cosφ)/Sr
Area of each rotor bar is given by ab = Ib/δb in mm2
Advantages of closed slots
1. Low reluctance
2. Less magnetising current
3. Queiter operation
4. Large leakage reactance & so starting current is limited
Disadvantages of closed slots
Reduced over load capacity
--------------------------------------------------------------------------------------------------------------------------------
4.18 DESIGN OF END RINGS
It can be shown that if flux distribution is sinusoidal then the bar current & end ring
current will also be sinusoidal.
Maximum value of end ring current,Ie(max) = (Sr*Ib(max))/2*p
However current is not maximum in all the bars under one pole at the same time but
varies according to sine law, hence the maximum value of the current in the endring is
the average value of the current of half the bars under one pole.
Maximum value of end ring current,Ie(max) = (Sr*Ib(ave))/2*p
RMS value of end ring current,Ie = Ie(max)/1.414
Area of cross section of end ring ae= Ie/δe in mm2
Also
Area of cross section of end ring ae = de*te
de- depth of end ring;
te- Thickness of endring
----------------------------------------------------------------------------------------------------------
4.19 DESIGN OF WOUND ROTOR
The wound rotor has the facility of adding external resistance to rotor circuit in order
to improve the torque developed by the motor. The rotor consists of laminated core
with semi-enclosed slots and carries a 3 phase winding.
Rotor windings
For small motors mush windings are employed.
For large motors double layer bar type wave windings are employed.
Number of rotor turns
Number of rotor turns can be calculated by
Number of rotor turns,Tr = (Kws*Ts*Er)/(Kwr*Es)
Ts- Number of stator turns
Rotor current , Ir = (0.85*Is*Ts)/Tr
Area of rotor conductor,ar = Ir/δr
Number of rotor slots
With certain combination of stator and rotor slots, the following problems may develop
in the induction motor.
1. The motor may refuse to start
2. The motor may crawl at some subsynchronous speed
3. Severe vibrations are developed & so the noise will be excessive
The above effects are due to harmonic magnetic fields developed in the machine. The
harmonic fields are due to
1.winding
2.slotting
3.Saturation
4. irregularities in air gap
----------------------------------------------------------------------------------------------------------
4.20 Rotor teeth
.
Minimum teeth area per pole = φm/1.7
Teeth area per pole
= (Sr/p)*Li*Wtr
Minimum width of teeth, Wtr= φm/(1.7*Sr/p*Li)
Minimum width of teeth, Wtr=[Ӆ(Dr-2dsr)/Sr]-Wsr
--------------------------------------------------------------------------------------------------------------------
4.21 Rotor core
Depth of rotor core dcr= φm/(2*Bcr*Li)
Where
Bcr= Flux density in the rotor core
Inner diameter of rotor lamination, Di= Dr-2(dsr+dcr)
Where dcr = depth of rotor core
----------------------------------------------------------------------------------------------------------
4.22 Slip rings & brushes
The wound rotor consists of 3 slip rings mounted on the shaft but insulated from it.
The rings are made of either brass or phosphor bronze.
.
The brushes are made up of metal graphite. The brush dimensions are decided by
assuming a current density of 0.1 to0.2 A/mm2
--------------------------------------------------------------------------------------------------------------4.23 Output equation and output co-efficient of AC machines (Induction
machine)
The equation of induced emf ,frequency,current through each conductor and total
number of armature conductors of an AC machine are given below
Induced emf per phase
Eph =4.44 fФTph Kws
The frequency of induced emf
f=pns / 2
current through each conductor
Iz = Iph / a
Iph – current per phase
a-number of parallel circuit or paths per phase
p-no of poles
ns-synchronous speed
Total number of armature conductors
Z – number of phases *2Tph
Z = 3*2Tph
Z = 6Tph
We know that
Specific magnetic loading
Bav = pФ / πDL ; pФ = πDLBav
Specific electric loading
ac=IzZ / πD = IzZ = πDac
KVA rating of a 3 –phase machine
Q =3Eph Iph *10-3
Substitute
Eph = 4.44 f ФTph Kws
Iph = Iz (a=1) one parallel path
Q = 3* 4.44 f Ф Tph Kws * Iz *10-3
= 3 * 4.44 (pns/2) ФTph Kws Iz * 10-3
= 6.66 p ns ФTph Kws Iz * 10-3
Q = 1.11 pФ Iz 6Tph ns Kws *10-3
We know that
6Tph = Z
Q = 1.11 pФ Iz Z ns Kws * 10-3
Q = 1.11* πDL Bav *πDac *ns * Kws * 10-3
Q = 1.11 π2 Bav ac Kws * 10-3 * D2 L ns
Q = 11 Bav ac Kws *10-3 * D2 L ns
Where
Co = 11 Bav ac Kws *10-3
-------- output co -efficient
Q =Co D2 L ns
-------- output equation
PROBLEMS
P1) Determine the approximate diameter and length of stator core, the number
of stator slots
and the number of conductors for a 11 KW, 400V, 3, 4-pole,
1425 rpm, delta connected induction motor. Bav = 0.45 Wb/m2, ac=23000 amp.
Cond/m, full load efficiency = 0.85, pf = 0.88, L/ = 1. The stator employs a
double layer winding.
Given Data
KVA INPUT = 11 KW
3
N= 1425 rpm
Bav = 0.45 Wb/m2
p=4-pole
ac = 23000 amp.cond/m
V=400 V
= 0.85
pf = 0.88
L/ = 1
To find
Diameter and length of stator core (D,L)
The no of stator slots (Ss)
The no of conductors (Zss)
Soln
KVA input = output / η*pf
delta connected
doublelayerwinding
= 11 / 0.85*0.88
KVA input = 14.7 KVA
Synchronous speed ns =2f / p
ns=2*50 / 4
ns=25rps
Kws = 0.955
To find D and L
KVA input = CoD2Lns
D2L = KVA i/p / Co*ns
Co = 11 Bav ac Kws *10-3
Co = 11 *0.955 *0.45 *23000*10-3
Co = 108.7268KVA/m3-rps
D2L = Q / Co*ns = 14.7 / 108.72*25
D2L = 0.0054m3 ----------------------------------------------(1)
Given that
=1
L = = 1 = πD /p = πD / 4
L = 0.1494D ---------------------------------------------------(2)
Substitute eqn (2) in eqn (1)
D2*0.1494D
= 0.0054
0.1494 D3 = 0.0054
D = 0.1902m
Eqn (2) becomes L = 0.1494*D
L = 0.1494*0.1902
L = 0.15m
To find
Stator slot Ss = no of phases *poles*q
For q = 2, Ss = 3*4*2 = 24
q=3, Ss = 3*4*3 = 36
q=4, Ss = 3*4*4 = 48
stator slot pitch should lie between 15mm to 25mm
stator slot pitch Yss = πD / Ss
when Ss = 36, Yss = π*0.19*103 / 36 = 16.58mm
when Ss = 36, Yss lies between 15mm to 25mm ,hence the stator slot pitch can be 36
Ss = 36
To find Ts
The stator is delta connected ,the line voltage is same as phase voltage VL= Vph,
VL= Vph, = 400V
Bav = pФ / πDL
Ф = Bav*πDL / p
Ф = 0.45*π*0.19*0.15 / 4
Фm = 0.01wb
Es = 4.44fФmKwsTs
Ts = Es / 4.44fФmKws
Ts = 400 / 4.44*50*0.01*0.955
Ts = 188
To find conductor per slot (Zss)
Zss = 6Ts / Ss
Zss = 6*188 / 36
Zss = 31.33 (Zss should be even integer for double layer wdg so it is 30 or 32
Let Zss = 32
Total stator conductor = Ss*Zss
= 36*32
= 1152
New value of turns per phase Ts = Zss *Ss / 6
Ts = 32 *36 / 6
Ts = 192
Result
Diameter of stator
= 0.19 m
Length of stator
= 0.15 m
Number of stator slots
= 36
Total stator conductor
= 1080 or 1152
……………………………………………………………………………………………………………...
P2) Estimate the stator core dimension ,no of stator slots
and no of stator
conductors per slots for a 100KW,3300V,50Hz,12 pole ,star connected slip ring
induction motor,Bav = 0.4wb/m2.ac= 25000amp-cond/m,η=0.9,pf = 0.9,choose
main dimensions to give best power factor .the slot loading should not exceed
500amp.cond, = √0.18L.
Given data
Q = 100KW, f=50Hz , star connected slip ring ,V = 3300V, p=12pole , IM
Bav = 0.4wb/m2
ac=25000ampcond/m
η = 0.9 , pf = 0.9
slot loading should not exceed 500 amp cond
to find
stator core dimension (D and L)
Ss = ?
No of stator conductor per slot?
Soln
KVA input Q= output / η*pf
= 100 / 0.9*0.9 = 123.457KVA
ns=2f / p = 2*50 / 12 =8.33rps
KVA input = Co D2Lns
Co = 11 Bav ac Kws *10-3
Co = 11 *0.4 *0.96 *25000*10-3
[ Kws = 0.96]
Co = 105.6KVA/m3-rps
KVA input = CoD2Lns
D2L = KVA i/p / Co*ns
D2L = 123.4 / 105.6*8.33
D2L = 0.1403m3
-------------------------------(1)
For best power factor
= √0.18L
= πD / p = √0.18L
Π2D2 / p2 =0.18L
D2 = 0.18* p2*L / Π2
D2 = 2.6262L
Put D2 in eqn (1)
D2L = 0.1403
2.6262L*L = 0.1403
L2 = 0.1403 / 2.6262
L= √0.1403 / 2.6262
L = 0.23m
D2 = 2.6262L
D = √2.6262*0.23
D = 0.78m
Stator in star connection
Es = EL / √3 = 3300 / √3 = 1905.2V
Flux per pole
Bav = pФ / πDL
Ф = Bav*πDL / p
Ф = 0.4*π*0.78*0.23/ 12
Ф = 0.018wb
Es = 4.44 fФmKwsTs
Stator turns per phase
Ts = Es / 4.44 fФmKws
Ts = 1905.25 / 4.44*50*0.0188*0.96
Ts = 478
Stator slot pitch should lie between 15mm to 25mm
Stator slot Ss = πD / Yss
Yss = 15mm
Yss = 25mm
Ss = π*0.78 / 15*10-3
Ss = π*0.78 / 25*10-3
Ss = 163
Ss = 98
Stator slot Ss should lie between 98 to 163
Stator slot Ss = number of phases *poles*q
When q = 2 ; Ss = 3*12*2 = 72
q = 3 ; Ss = 3*12*3 = 108
q = 4 ; Ss = 3*12*4 = 144
q = 5 ; Ss = 3*12*5 = 180
Ss values of 108 and 144 lie in the range of 98 to 163
Ss = 108 or Ss = 144
Check for slot loading
Slot loading = ZssIs
Is=KVA*103 /√3*VL = 123.4*103 / √3*3300
Is = 21.6A
When Ss =108
Ss = 144
Zss =6Ts / Ss = 6*478 / 108
Zss =6Ts / Ss = 6*478 / 144
Zss = 26.5
Zss = 19.9~20
Slot loading = Zss*Is
slot loading = 20*21.6 = 432
= 26*21.6
= 561.6 amp.cond
Slot loading doesnot exceed 500ampcond
Hence 144 slots is suitable for the machine
Zss = 20 , Ss = 144
Total stator conductor = Zss*Ss
= 144*20 = 2880
New value of turns per phase Ts = ZssSs / 6
= 20*144 / 6
Ts = 480
……………………………………………………………………………………………………………….
P3) Determine the D and L of a 70 Hp, 415V, 3-phase, 50-Hz, star connected, 6
pole induction motor for which ac = 30000 amp.cond/m and Bav = 0.51 wb/m2.
Take = 90 % and pf = 0.91.
Assume = L. Estimate the number of stator
conductors required for a winding in which the conduxtors are connected in 2parallel paths. Choose a suitable number of conductors/ slots, so that the slot
loading does not exceed 750 amp. cond.
Given Data
70 HP
415 V
Bav = 0.51 Wb/m2
3-phase
50 Hz
ac = 30000 amp.cond/m
= 0.9
pf = 0.91
star connected
6-pole
=L
slot loading < 750 amp.cond.
conductors are connected in 2-parallel paths.
Soln
KVA input Q = HP*0.746 / η*PF
Q = 70*0.746 / 0.9*0.91
KVA input Q = 63.76KVA
Synchronous speed ns=2f / p = 2*50 / 6 = 16.667rps
Q= CoD2Lns
D2L = Q / Co*ns
Co = 11 Bav ac Kws *10-3
Co = 11 *0.51 *0.955 *30000*10-3
[ Kws = 0.955]
Co = 160.72 KVA/m3-rps
D2L = Q / Co*ns
D2L = 63.76 / 160.72*16.667
D2L= 0.0238 ------------------------------(1)
Given that
=L
L = πD / p = πD / 6
L = 0.5236D
Sub in eqn (1)
D2L = 0.0238
D2*0.5236D = 0.0238
D = 0.36m
L = 0.5236*0.36
L = 0.186m
Total number of stator conductor
Total stator conductor =6Ts *no of parallel path ( 2Ts*no of phases)
= 6Ts*2
Total stator conductor
= 12Ts
To find Ts
Bav = pФ / πDL
Фm = Bav*πDL / p = 0.51*π*0.36*0.19 / 6
Фm=0.0183wb
Es = 4.44 fФmKwsTs
Stator turns per phase
Ts = Es / 4.44 fФmKws
Ts = (415 / √3) / 4.44*50*0.0183*0.955
(since induction motor in star
Connection )
Ts = 61.756 ~62
Slot pitch Yss should lie between 15mm to 25mm
When Yss = 15mm
Yss = 25mm
Ss = πD / Yss
Ss = πD / Yss
Ss = π*0.36 / 15*10-3
Ss =π*0.36 / 25*10-3
Ss = 75
Ss = 45
Ss should lie between 45 to 75
Stator slot = no of phase *poles *q
q=2 ; Ss = 3*6*2 = 36
q=3 ; Ss = 3*6*3 = 54
q=4 ; Ss = 3*6*4= 72
the value of Ss which lie between 45to 75
hence Ss =54 and Ss = 72
check for slot loading
when Ss = 54
when Ss = 72
slot loading = ZssIz
slot loading = ZssIz
To find Iz
Stator current per phase
Is=KVA *103 / √3VL
Is =63.76 *103 / √3 *415
Is = 88.7A
IL = Ip
Iz = Is /a
Iz =88.7 / 2
Iz = 44.35A
When Ss = 54
when Ss = 72
Zss = total stator conductor / Ss
Zss = total stator conductor / Ss
Zss = 744 /54
Zss = 744 /72
Zss = 13.77 ~14
Zss = 10.33 ~11
Slot loading =ZssIz
slot loading = ZssIz
= 14*44.35
= 11*44.35
= 620.9amp cond
= 487.85 amp cond
In both the cases the slot loading is not exceeded
For lower fabrication cost Ss = 54
For low temperature rise Ss = 72
Let Ss = 54
Zss = 14
Total stator conductor
= Zss *Ss
= 14*54
Total stator conductor
= 756 conductors
New value of turns per phase = Ts = Zss*Ss / (6*2)
Ts= 756 /12
Ts= 63
Result
Diameter of stator = 0.36 m
Length of rotor
= 0.19 m
Turns / phase
= 63
Number of stator slots
= 54
Conductors / slot
= 14
……………………………………………………………………………………………………………….
P4) Estimate the main dimensions, air-gap length, stator slots, stator turns per
phase and cross sectional area of stator and rotor conductors for a 3-phase,
15
HP, 400 V, 6 pole, 50 Hz, 975 rpm, induction motor. The motor is suitable for
star delta starting. Bav = 0.45 Wb/m2, ac = 20000 amp.cond/m, L\ = 0.85, =
0.9, pf = 0.85
Given data
star delta starting (the motor should be designed for delta connection)
3Ф KVA o/p = 15HP
V=400v
P=6 pole
f=50Hz
N=975rpm
Bav = 0.45 wb/m2
ac=20000amp.cond / m
L\ = 0.85, = 0.9, pf = 0.85
To find
Main dimension
Airgap length
Stator slots
Rotor slots
Stator turns per phase
Rotor turns per phase
Cross sectional area of stator
Cross sectional area of Rotor
Soln
KVA i/p = Q = HP*0.746 / η*pf
= 15*0.746 / 0.9*0.85
KVA i/p Q = 14.63KVA
Synchronous speed ns=2f / p = 2*50 / 6 = 16.667rps
Q= CoD2Lns
D2L = Q / Co*ns
Co = 11 Bav ac Kws *10-3
Co = 11 *0.45 *0.955 *20000*10-3
[ Kws = 0.955]
Co = 94.545 KVA/m3-rps
D2L = Q / Co*ns
D2L = 14.63 / 94.545 *16.667 = 9.284*10-3
L / =0.85
L = 0.85 *
= 0.85*πD / p
= 0.85*πD / 6
L = 0.445D
D2L = 9.284*10-3
D20.445D = 9.284*10-3
D3 = 9.284*10-3
D = 0.275m
L = 0.445D = 0.445*0.275
L = 0.12m
Фm = Bav*ФDL / p
Фm = 0.45 *π*0.275*0.12 / 6
Фm = 7.775*10-3wb
Stator turns per phase
Ts = Es / 4.44 fФmKws
Ts = 400 / 4.44*50*7.775*10-3*0.955
Ts= 242.66 ~242
Total stator conductor = 6Ts = 6*242 = 1452 conductors
Slot pitch lies between 15mm to 25mm
Yss = 15mm
Yss= 25mm
Ss =πD / Yss
Ss =πD / Yss
= π*0.275 / 15*10-3
= π *0.275 / 25*10-3
Ss = 58
Ss = 34
The number of slots lies between 34 to 58 stator slots
Stator slot = no of phase *poles *q
q=2 ; Ss = 3*6*2 = 36
q=3 ; Ss = 3*6*3 = 54
q=4 ; Ss = 3*6*4= 72
let Ss = 36
Zss = 6Ts / Ss = 1452 / 36 = 40.33 total stator conductor = Ss*Zss
= 36*40
= 1440 conductors
The new value of Ts =Zss*Ss / 6
= 40*36 / 6
Ts = 240
KVA input Q = √3VLIL*10-3 = 3EphIph*10-3
Iph = Q*103 / 3*Eph
= 14.62 *10-3 / (3*400)
Iph = 12.183A
Let δ = 3A/mm2
Cross sectional of stator conductor as= Iph / δ = 12.183 / 3
as=4.061mm2
Airgap length
Lg=0.2+2√DL = 0.2+2√0.275*0.12 = 0.5633mm
lg=0.6mm
Rotor slot
Sr- number of rotor slots
Sr should be less than Ss and (Ss-Sr) can not be
0 , ±p , ±2p , ±3p , ±5p , ±1 , ± (p±1) , ±2 , ± (p±2)
Let p = 6
Ss-Sr can not be
0 , ±6 , ±12 , ±18 , ±30 , ±1 , ±2 , ±5 , ±7 , ±8 , ±4
Here
Ss-Sr can be ±3 , ±9 , ±10 , ±11 , ± etc……….
Let Ss-Sr = ±3 ; Sr = Ss-3
Sr = Ss+3
Sr = Ss – 3 = 36- 3 =33
Area of cross section of rotot bar ab=Ib / δb
Rotor bar current Ib = 0.85*6Ts*Is / Sr
= 0.85 * 6*240 *12.183 / 33
Ib = 451.88A
δb=4A/mm2 ; ab=Ib / δb = 451.88 / 4
ab=112.96mm2
end ring current
Ie =SrIb / πp = 33*451.88 / π *6
Ie= 791.1A
Let δe=4A/mm2
Area of cross section of end ring ae=Ie / δe
ae=791.1 / 4
ae=197.775mm2
Result
Diameter of stator
= 0.275 m
Length of stator
= 0.12 m
Turns / phase
= 240 turns
Number of stator slots
= 36
Number of rotor slots
= 33
Area of cross-section of stator conductor
= 4.061 mm2
Area of cross-section of rotor bar
= 113 mm2
Area of cross-section of end ring
= 200 mm2
……………………………………………………………………………………………………………
P5) Design a cage rotor for a 40 HP, 3-phase, 400V,50 Hz, 6 pole, delta
connected induction motor having a full load of 87% and a full load pf of 0.85.
Take D = 33 cm and L = 17 cm. Stator slots – 54, conductors/slot = 14. Assume
suitable the missing data if any.
Given data
Q =40HP ; f=50Hz ; delta connected 3 phase IM
P=6 pole V=400V ; = 0.87 ; pf = 0.85
D= 33cm = 33 /100 =0.33m
L = 17cm = 0.17m
Stator slots =Ss = 54
Conductor per slots Zss = 14
To find
Cage rotor
Sr , ab,ae,Dr,Lr,lg
Ss-Sr cannot be
0 , ±p , ±2p , ±3p , ±5p , ±1 , ± (p±1) , ±2 , ± (p±2)
Let p = 6
Ss-Sr can not be
0 , ±6 , ±12 , ±18 , ±30 , ±1 , ±2 , ±5 , ±7 , ±8 , ±4
Here
Ss-Sr can be ±3 , ±9 , ±10 , ±11 , ± etc……….
Let Ss-Sr = ±3 ; Sr = Ss-3
Sr = Ss+3
Sr = Ss – 3 = 54- 3 =51
KVA i/p = Q = HP*0.746 / η*pf
= 40*0.746 / 0.87*0.85
KVA i/p Q = 40.351KVA
Rotor bar current Ib=6TsIs / Sr
Is = Iph = Q / 3Eph*10-3
Is = 40.351 / 3*400*10-3
Is = 33.62A
Total stator conductor = 6Ts
Ts = total stator conductor / 6
Ts= slots *conductor per slots/ 6
Ts = 54*14 / 6
Ts = 126
Ib=6*126*33.62 / 51
Ib=423.6A
Let δb = 4A/mm2
ab=Ib /δb
ab=423.6 /4 = 105.9 =106mm2
End ring current
Ie =SrIb / πp = 51*423.6 / π *6
Ie= 1146.139A
Let δe=4A/mm2
Area of cross section of end ring ae=Ie / δe
ae=1146.139/ 4
ae=286.53mm2
In IM length of rotor core = stator core
Length of rotor core Lr = 17cm = 0.17m
Length of airgap
Lg=0.2+2√DL = 0.2+2√0.33*0.17 = 0.7mm
lg=0.7mm
Diameter of Rotor
Dr = D-2lg
Dr = 0.33 -2*0.7*10-3
Dr = 0.3286m
Result
Length of rotor
= 0.17 m
Diameter of rotor
= 0.3286 m
Length of air-gap
= 0.7 mm
……………………………………………………………………………………………………………….
P6) A three phase induction motor has 54 stator slots with 8 conductors per slot
and 72 rotor slots with 4 conductors per slots. Find the number of stator and
rotor turns. Find the voltage across the rotor slip rings, when the rotor is open
circuited and at rest. Both stator and rotor is star connected and a voltage of
400 volt is applied across the stator terminals.
Given data
Three phase IM
Ss = 54
Zss = 8
Sr = 72
Zsr = 4
V=400V
To find
Ts and Tr
Soln
Stator conductor slots Zss = 6Ts /Ss
Ts = Zss*Ss / 6 = 8*54 / 6
Ts =72
Rotor conductor slots Zsr =6Tr /Sr
Tr = Zsr*Sr / 6
Tr = 4*72 / 6
Tr= 48
Let Kws = Kwr
Turns ratio of induction motor
=
Rotor emf at standstill
Er = Es
Er = (400 / √3) *(48 /72)
Er = 153.96V
Rotor emf between slip rings (line value) = √3 *Er
= √3*154
= 266.7V
……………………………………………………………………………………………………..............
UNIT –V
ALTERNATORS
Constructional details – Output equation – Choice of specific electric and
magnetic loadings- Estimation of D and L – Stator slots- Length of airgapConductors/turn- Stator yoke design-Design of damper windings- Design of
field windings- Rotor design of turbo alternator.
Consists of
-Introduction
-Output equation
- Choice of specific magnetic loadings
- Choice of specific electric loadings
-Short Circuit Ratio
-Length of airgap
- Number of stator slots
-Field design
5.1 INTRODUCTION
The synchronous machines may be classified into
(i)Salient pole machines
(ii)Cylindrical rotor machines
5.1.1 (i)Salient pole machines
These are driven by water wheels or diesel engines. They operate at low speeds and
so large number of poles is required to produce desired frequency. This type of
machine has projecting poles and field coils are mounted on the poles.
5.1.2 (ii)Cylindrical rotor machines
These are driven by steam turbines and gas turbines which run at very high
speeds. They have slots on the periphery of smooth cylindrical rotor. The field
conductors are placed on these slots.
-----------------------------------------------------------------------------------------------------5.2 OUTPUT EQUATION
----------------------------------------------------------------------------------------------------5.3 Design of Salient Pole Machines
Main dimensions of salient pole machines are D & L
D type of pole
L
Permissible peripheral speed
---------------------------------------------------------------------------------------------------5.4 Types of poles
Round poles
Rectangular poles
Round pole
Length of pole (L) = width of pole shoe (bs) (i.e L = bs)
– round pole
Length of pole = Length of stator core
Rectangular poles
The value of allowable peripheral speeds depends on the type of pole attachment
For bolted pole construction
For dovetail & T-head
50 m/sec
80 m/sec
-----------------------------------------------------------------------------------------------------5.5 Short Circuit Ratio (SCR)
The ratio of field current required to produce rated voltage on open circuit to
field current required to circulate rated current at short circuit.
= 1/ direct axis synchronous reactance = 1/ Xd
Thus SCR is the reciprocal of Xd, if Xd is defined in p.u.value for rated voltage and
rated current. But Xd for a given load is affected by saturation conditions that then
exists, while SCR is specific and univalued for a given machine.
Non-salient pole alternators : 1- 1.5 ; Salient pole alternators : 0.5 – 0.7
5.5.1 Effect of SCR on machine performance
i) Voltage regulation :A low SCR highXdwhich results in large voltage drop
which results in poor voltage regulation.
ii) Parallel operation :A low SCR which results in high Xd which results in low
synchronizing power which results in parallel operation becomes difficult.
.
iii) Short circuit current : A low SCR which results in high Xd which results in low
short circuit current. But short circuit current can be limited by other means not
necessarily by keeping a low value of SCR.
iv) self excitation :Alternators feeding long transmission lines should not be
designed with small SCR as this would lead to large terminal voltage on open
circuit due to large capacitance currents.
5.5.2. Summarizing, high value of SCR leads to
i)high stability limit
ii)low voltage regulation
iii)high short circuit current
iv)large air gap
The present trend is to design machines with low value of SCR, this is due to the
recent development in fast acting control and excitation systems
------------------------------------------------------------------------------------------------------
5.6 CHOICE OF SPECIFIC MAGNETIC LOADING
It depends on
Iron loss
Stability
Voltage rating
Transient short circuit current
Parallel operation
Higher value of magnetic loading
Increased iron loss
Decreased efficiency
Increase temperature rise
Decrease leakage reactance (Results in higher short circuit current)
Lower value of magnetic loading
Lower value of Bav used in high voltage machines.
Hence to limit short circuit current, a low value of magnetic loading should
be chosen.
------------------------------------------------------------------------------------------------------
5.7 CHOICE OF SPECIFIC ELECTRIC LOADINGS
Copper loss
Temperature rise
Voltage rating
Synchronous reactance
Stray load losses
A high value of ac has
1. Higher copper loss
2. Lower efficiency
3. Higher temperature rise
Ac
depends cooling coefficient
When machine designed with high value of ac has following characteristics
Poor voltage regulation
Low current under short circuit conditions
Low value of steady state stability limit
Low value of synchronising power.
Ac
lies in the range of 20000 to 40000 amp cond / m for salient pole machines.
Ac
lies in the range of 50000 to 75000 amp cond / m for Turbo alternator.
5.8 NUMBER OF STATOR SLOTS
Factors to be considered in the selection of number of slots :
.
1. Balanced 3-phase winding to be obtained
2. With large number of slot
i) Which results in large number of coils gives increased labour cost
ii) Cooling is improved
iii) Tooth ripples are less
iv) Flux density in the iron increases due to decreased tooth width
Guide lines: Slot pitch (ys)≤ 25 mm for low
voltage machines;
≤ 40 mm for machines upto 6 kV ;
≤ 60 mm for machines upto 15 kV
-----------------------------------------------------------------------------------------------------------
5.9 METHODS OF ELIMINATING HARMONICS
By using
i) Distributed windings
ii) Fractional coil pitch
iii) Fractional slot windings
iv) Skewing
v) Large airgap
Further calculations needed after determining D and L
i) Flux per pole = Φ = Bave (π DL/p )
ii)Tph is calculated from the EMF equation taking Eph= Vph
iii)Iph=(Q x 103) / √ 3 VL
iv) Armature MMF/pole = Ata= 2.7 IphTphKw/p
v)Effective area per pole = 0.6 – 0.65 times actual area
----------------------------------------------------------------------------------------------------------------
5.10 LENGTH OF AIR GAP
5.10.1 Advantage of large air gap are
Reduction in armature reaction
Small value of regulation
Higher value of stability
Better cooling
Less sensitive
Lower tooth pulsation loss
Less noise
Smaller unbalanced magnetic pull
5.10.2 Disadvantage of large air gap
Field mmf increased which results in larger field winding
High cost
For salient pole machine
For synchronous motors
5.10.3 Estimation of Air Gap using SCr
We know that
Mmf required for air gap = 800000 Bg Kglg ----------------------------- (1)
Mmf required for airgap is equal to 80% of no load field mmf
Therefore mmf required for air gap = 0.8 ATf0 ----------------------------- (2)
Equating (1) & (2)
800000 Bg Kg lg = 0.8 ATf0
----------------------------------(3)
armaturemmf per pole
current per phase
turns per phase
winding factor of stator
form factor
Sub
value in equation (3)
------------------------------------------------------------------------------------------------------------------
5.11 TURBO ALTERNATOR
Fig (5.11) Turbo alternator
Turbo alternators are characterised with long axial length and short
diameter. The high speed of the rotor limits the diameter of the rotor to about 1.2m
giving a peripheral speed of about 175 m/sec.
In turbo alternator the diameter is limited by the maximum peripheral speed
Va.
Peripheral spped
The output equation of ac machine is modified by using the above equation.
The KVA rating or output KVA
Length of the armature L can be estimated from the above equation.
The value of specific loading:
For conventionally cooled alternators
For large water cooled alternator
Length of air gap
Mmf for air gap
Mmf for air gap
---------------------------- (1)
----------------------------- (2)
Equation (1) & (2)
800000
800000
800000
The armature slot, winding, turns per phase and conductor designs of turbo
alternator are same as that of salient pole alternator.
-----------------------------------------------------------------------------------------------------
5.12 ARMATURE DESIGN OF SALIENT POLE ALTERNATOR
The winding used in synchronous machines may be single layer of double
layer type.
Number of armature slots
The factors considered for the selection of armature slots.
Smaller number of slots
Low cost
Hot spot temperature
Larger leakage reactance
Larger number of slots
Reduced tooth ripples and losses
Increase flux density at the teeth and hence iron loss
Stator slot pitch
values are
for low voltage machines
for 6Kv or low voltage machines
for machines upto 15Kv.
In salient pole machines
Stator slot / Pole / Phase is usually 2 to 4.
Turns per phase
If parallel path per phase = 1
If parallel path per phase = a
Armature conductors
If number of parallel path / phase = 1
Current through a conductor
If number of parallel path / phase = a
Current through a conductor
The range of current density
Therefore, Area of cross section of armature conductor,
5.13 FIELD DESIGN (SALIENT POLES)
Data needed for the design of the Field winding:
i)Flux density in the pole core
ii)Winding depth (df)
iii)Leakage factor (pole flux/gap flux)
iv).Field winding space factor (Sf)
v)Power dissipation (qf) in W/m2
vi)The ratio of field MMF to armature MMF
vii)Allow about 30 mm for insulation , flanges and height of the poleshoe.
In order to design the field wdg ,the exciter voltage must be known
The exciter voltage varies between 50V to 400 V
This is uaually specified by the customer
For small and medium size machines
Exciter voltage of 125V
For large size machines
Exciter voltage = 250V
Field wdg should be designed for a voltage to allow for the drop in voltage from 15
to 20% less than the exciter voltage to allow for the drop in voltage between field
and the exciter and to allow for variations in the reluctance of magnetic field.
Voltage across each field coil
Ef = (0.8 to 0.85) Ve / p
p-no of poles
Ve – exciter voltage
Height of the field coil (winding height )
Hf= hpl – h1-space taken by spool,flanges
Space taken by spool = 20mm
Height of the pole = hpl
Table (5.13) Depth of winding
Pole pitch in mm
Winding depth in mm
0.1
25
0.2
35
0.4
45
Voltage across each field coil
Ef= field current * resistance of each field coil at 75˚c
Ef = If [ TfρLmtf / af]
Tf – no of turns in each field coil
Lmtf – length of mean turn of the coils
Ef = ATfl*ρLmtf / af
Area of field conductors
Af= ATfl ρLmtf / Ef
Current density in field conductors δf
δf=3 to 4 A/mm2
field current
If= current density * area of conductors
If = δf af
Number of field turns
Tf = ATfl / If
In case wdg space available is less,increase the depth,If space is more ,decrease the
depth
The resistance of the wdg is calculated at 75˚c
Rf = Tf * ρ Lmtf / af
Copper loss in each field coil at 75˚c
Qf= If2 Tf (ρ Lmtf) / af
Dissipating surface of the coil is
S =2 Lmtf (hf+df)
Cooling co efficient to rotating field coils
Cf = 0.08 to 0.12 / 1+0.1Va
Temperature rise
θ=QfCf / S
The final check applied is to note the clearance between adjacent field coils from
the pole drawing .the minimum clearance between them should be 15mm.
------------------------------------------------------------------------------------------------------
5.14 DESIGN OF DAMPER WINDING
The design of damper wdg depends upon the purpose for which it is provided. In
syn generators ,it is provided to suppress the negative sequence field and to damp
the oscillations when the machine starts hunting ,while in syn motor its function is
to provide starting torque and to develop damping power when the machine starts
hunting .
Use of damper winding
1. Avoid hunting in machines
2. Suppress inverse rotating field (negative sequence field)
The amplitude of fundamental of mmf of one phase of a polyphase wdg is
AT1 = 4 / π ATm Kw1*
ATm = q Zs Is / √2
Sub Is =Iph (current in each conductor)
Conductors per slot
Zs = 2Tph /qp
ATm = q(2Tph / qp )* Iph / √2
ATm = √2 * Iph * Tph / p
Pulsating mmf
AT1 = 4√2 /π * (Iph Tph Kw1) / p
Pulsating mmf
1. Synchronous mmf
2. Inverse mmf
If the damper wdg is to suppress the inverse rotating field ,it must develop an equal
mmf as that of the inverse field.
Mmf of damper = 4√2 /2π * (Iph Tph Kw1) / p --------------------(1)
Ampere conductor per pole = ac
= 6 Iph Tph /p
Sub ac in eqn (1)
Mmf of damper winding = 4√2 /2π * ac / 6 *Kw1
= 0.143 ac
The area provided for damper wdg
Adδd = 0.143 ac
(or)
Ad = 0.143 ac / δd
Area per pole of damper pass provided
Ad = 0.2 ac / δd
The current density in the damper bars is usually taken as 3 to 4A/mm2
Total area of damper wdg is distributed into smaller cross sections depending upon
the number of bars used.
The damper winding slot pitch = stator slot pitch
Pole arc = number of bars per pole *Ys *0.8
The length of each damper bar
Ld = 1.1 L for small machines
Ld = L+0.1m, for larger machines
Cross section of each damper bar,
ad=total area of bars per pole /no of damper bars per pole
ad=Ad /Nd
In case of circular bars
ad= (π /4) dd2
dd = diameter of damper bars
The area of each ring short circuiting the bars
Aring = (0.8 to 1) Ad
-----------------------------------------------------------------------------------------------------
PROBLEMS
P1) For a 250KVA.1100V, 12 pole, 500 rpm, 3 phase alternator. Determine air
gap diameter, core length, number of stator conductors, number of stator
slots and cross section of stator conductors. Assuming average gap density as
0.6 wb/m2 and specific electric loading of 30000 amp. Cond/m,
.
Given data
Q = 250KVA, N = 500 rpm, ac = 30000 amp cond/m, V = 1100V
P = 12 pole, Bav = 0.6 wb/m2,
To find:
Air gap diameter (D), no of stator conductors, core length (L), no of stator slots,
cross section of stator conductors.
Solution:
Output equation:
Flux per pole
Alternators are generally star connected
Total armature conductors =
Stator slots = no of phases
poles
q
Let
Current per phase,
,
Current density
Area of cross section of armature conductor,
-----------------------------------------------------------------------------------------------------
5.15 DISPERSION COEFFICIENT
It is defined as the ratio of magnetizing current to ideal short circuit current.
Dispersion co-efficient
5.15.1 Higher value of dispersion co efficient result in
Poor power factor
Reduced over load capacity
Reduced output
------------------------------------------------------------------------------------------------------------------