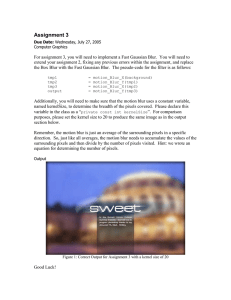
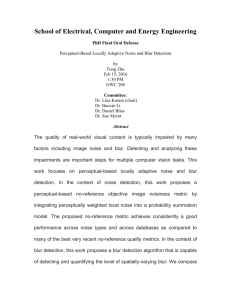
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/243480771 Image resolution limits resulting from mechanical vibrations. II - Experiment Article in Optical Engineering · May 1991 DOI: 10.1117/12.55843 CITATIONS READS 27 290 4 authors, including: Ofer Hadar Norman S Kopeika Ben-Gurion University of the Negev Ben-Gurion University of the Negev 161 PUBLICATIONS 1,410 CITATIONS 308 PUBLICATIONS 4,511 CITATIONS SEE PROFILE Some of the authors of this publication are also working on these related projects: Next generation encrypted adaptive video streaming understanding View project Image restoration via Ising-like models View project All content following this page was uploaded by Norman S Kopeika on 24 August 2015. The user has requested enhancement of the downloaded file. SEE PROFILE Image resolution limits resulting from mechanical vibrations. Part 2: Experiment S. Rudoler 0. Hadar M. Fisher Abstract. A theoretical model, developed by Wulich and Kopeika that gives the MTF for flow vibration frequency sinusoidal image motion applicable N. S. Kopeika, MEMBER SPIE Ben-Gurion University of the Negev Department of Electrical and Computer Engineering Beer-Sheva, Israel lL-84105 to reconnaissance, robotics, and computer vision, is evaluated experimentally to determine (1) accuracy of the MTF model and the validity of assumptions upon which it is based, (2) accuracy of "lucky shot" theoretical analysis to determine the number of independent images required to obtain at least one good quality image, and (3) accuracy of prediction for average blur radius. In most cases agreement between theory and experiment is quite good. Discrepancies are not too great and are attributed to problems with underlying theoretical assumptions where uniform linear motion cannot be assumed. The theory and experiment here are confined to low-frequency sinusoidal vibration where blur radius and spatial frequency content are random processes. Subject terms: image motion; modulation transfer function; mechanical vibrations. Optical Engineering 30(5), 577-589 (May 1991). CONTENTS 1. INTRODUCTION 1. Introduction 2. Experimental setup 2.1. Resolution chart 2.2. Camera 2.3. ITEX Series 2000 Image Processor 2.4. VAXstation II/GPX 3. Experimental MTF measurement 4. Lucky shot analysis 5. Average blur radius 6. Conclusions 7. Acknowledgment 8. References Paper 2893 received March 28, 1990; revised manuscript received Sept. 26, 1990; accepted for publication Nov. 25, 1990. This paper is a revision of a paper presented at the SPIE conference Airborne Reconnaissance XIV, July 1990, San Diego, Calif. The paper presented there appears (unrefereed) in SPIE Proceedings Vol. 1342. 1990 Society of Photo-Optical Instrumentation Engineers. Image motion as a result of vibrations is often the limiting factor in image resolution for moving systems, such as in reconnaissance, robotics, computer vision, etc. It is quite useful to model the expected image degradation as part of system analysis for two reasons: 1. To make system design much more cost effective; it makes no sense, for example, to utilize an expensive high-resolution sensor in a situation where vibrational blur limits image quality to resolution much less than that achievable with the sensor. 2. To permit image processing so as to improve the final image; knowledge of a vibrational motion MTF can strongly facilitate the image processing and perhaps even reduce stabilization requirements and, hence, cost. OPTICAL ENGINEERING / May 1991 / Vol. 30 No. 5 / 577 Downloaded from SPIE Digital Library on 30 Nov 2010 to 132.72.80.136. Terms of Use: http://spiedl.org/terms RUDOLER, HADAR, FISHER, KOPEIKA tx + te zw I— w 0 -J 0 C/) 0 Fig. 1 . Blur radius das a function of exposure time te for exposures shorter than vibration period T0. The effects of sinusoidal type image motion, which often results upon a probability distribution function calculated for sinusoidal from mechanical vibrations, can be divided into high and low vibrational frequencies. In the first case, the time exposure is frequency of image motion and time exposure such that te < longer than the vibrational period and the image blur is therefore the entire peak-to-peak translation ofthe image. Assuming image motion T0. As a result of this probability distribution function, average image blur was found to be almost directly proportional to the relative time exposure te/To; i.e. ,2 ; 3.57D x(t) = D cos2irtIT0 , (2) , (3) Minimum and maximum blur radii are the MTF for the high vibration frequency case is1 M5(f) = Jo(2ifD) . T0 (1) where Jo is the zero-order Bessel function,fis spatial frequency, and D is the amplitude of the sinusoidal displacement. The total blur radius for the high vibration frequency case is the peak-topeak displacement, which is 2D. The low vibration frequency situation, as shown in Fig. I , involves time exposures te shorter than the vibration period T0. In this case, the blur radius d is a random process that depends upon the time the exposure takes place. This type of blur is often more damaging than the high vibration frequency blur because in real-life situations D for low vibration frequencies is in many cases much greater than D for high vibration frequencies.2 Equation (2) is inappropriate for the low-frequency blur, although it has been used often in the past for want of a better MTF model. A theoretical model was developed recently that describes statistically random process , low-frequency blur radii and spatial frequency content.2 This includes best case, worst case, and average image degradation. In addition, a lucky shot model was developed that predicts the number of independent time exposures required to obtain at least one picture with a given probability Q so that its blur radius will be less than a given value of d. This is also equivalent to obtaining at least one picture with a spatial frequency content greater than a given spatial frequency bandwidth.2 The theoretical model was based dmin D[ 1 — cos(— /2i) \ T0 () ] dmax , 2D sn[() ()] (5) respectively. As seen in Fig. 1 , minimum blur occurs when exposure takes place at a vibration extremum, while maximum blur occurs when the exposure is centered at x(t) = 0. In all cases, the shorter the time exposure the smaller the blur radius. The translation of the mechanical data on vibration to the spatial frequency domain was accomplished using the assumption that for short time exposures the image velocity is essentially uniform, where the MTF for linear motion is1'2 M,(f) = sinc'rrfd . (6) The purpose of this paper is to report experimental results of the theoretical analysis for low mechanical frequency sinusoidal image motion.2 The experiments centered on the legitimacy of utilizing Eq. (6) for short exposure sinusoidal image motion, the accuracy of the lucky shot analysis prediction of the number of independent images required to obtain at least one good image when d < d0 'yd with a probability Q, and the accuracy of 578 / OPTICAL ENGINEERING / May 1 991 / Vol. 30 No. 5 Downloaded from SPIE Digital Library on 30 Nov 2010 to 132.72.80.136. Terms of Use: http://spiedl.org/terms IMAGE RESOLUTION LIMITS RESULTING FROM MECHANICAL VIBRATIONS. PART 2: EXPERIMENT Resolution chart Motion Vibration Platform Oscilloscope Function Generator Fig. 2. Experimental setup. .62.5 .189 .256 .370 .556 .455 .286 Lii i.00 .833 1.43 platform. Fortunately, the back and forth motion of the machine is sinusoidal. By attaching the resolution chart to the shaker, it was possible to vibrate it sinusoidally in the horizontal direction. The shaker has a very small frequency range that effectively 0.08. limited trials to te/T0 2.1. Resolution chart Figure 3 is the resolution chart used in these experiments. The numbers across the top of the chart represent the frequency in lines per millimeter (1pm) of each of the line sets. This chart was made using Cricket Draw software and an Apple laser printer. The resolution chart was vibrated sinusoidally by the shaker. A piezoelectric motion sensor was attached to the vibration plat- form so the motion of the platform could be displayed and measured. This signal was sent to a vibration meter that amplified it and sent it on to an oscilloscope. A Bruel and Kjaer AccelFig. 3. Resolution chart. Spatial frequencies in lines per millimeter. Eq. (3) for predicting average blur radius. The essential exper- imental setup is described in Sec. 2. The experimental MTF measurements are presented in Sec . 3 , the accuracy of the lucky shot analysis in Sec. 4, and the determination of average blur radius in Sec. 5, followed by conclusions in Sec. 6. 2. EXPERIMENTAL SETUP Figure 2 describes the main test setup used for these experiments. Unfortunately, an easily controllable vibration table was not available. Instead a chemistry shaker was used as a vibration erometer Type 4370 and Vibration Meter Type 25 1 1 were used. The vibration meter sent the oscilloscope a voltage proportional to the position of the moving resolution chart (Hameg Digital Storage Scope HM 205-2). The y-axis of the scope represented the position of the chart, while the x-axis displayed time. It was therefore possible to measure the position of the chart, as well as the amplitude and frequency of vibration. If a picture of the scope display was taken, the received image was only that which the scope beam traced during the exposure time. Since the y-component of that trace was the motion of the vibration platform, it was possible to measure d, the movement of the resolution chart, during the exposure time. The vibration platform, sensor, and amplifier essentially generate a sinusoidal wave on the scope. This signal can be simulated by using a function generator instead of the vibration equipment. The advantage to OPTICAL ENGINEERING / May 1991 / VI. 30 No. 5 / 579 Downloaded from SPIE Digital Library on 30 Nov 2010 to 132.72.80.136. Terms of Use: http://spiedl.org/terms RUDOLER, HADAR, FISHER, KOPEIKA this simulated motion is that measurement can be taken from the scope for a wide range of vibration frequencies not available from the shaker. The drawback, of course, is that there is no moving resolution chart to photograph using this method. As will be seen both the actual vibration equipment and the function generator were useful in these experiments . An IEC Model F3 1 function generator was used. hardware are written in C on the VAX and call up the ITEX C library of routines. The microVAX is also used for data analysis. In addition to the C compiler and the ITEX library, the VAXLAB signal processing software was used extensively to perform such functions as fast Fourier transforms and graphing. 3. EXPERIMENTAL MTF MEASUREMENT 2.2. Camera A Cohu CCD camera was used in this experiment along with a Fuji optical lens with adjustable focus and aperture. The camera has a fixed exposure time of 20 ms over which the incoming light is integrated. The CCD is a 754 x 488 pixel semiconductor matrix. Each pixel integrates the incoming light for 20 ms. During the next 20 ms, the data is shifted into a buffer and written out serially onto the communication channel . (Each pixel is transferred as an analog level, no A/D conversion takes place in the camera, and the signal is essentially time multiplexed and sent to ITEX hardware.) The output of the camera is in video format. During this 20 ms interval while the data is being transferred, the CCD array is integrating the incoming light for the next picture. Thus, during each 20 ms interval, one picture is being taken while the last picture is being sent to the ITEX hardware. One other important aspect of the CCD array is that the whole array is exposed simultaneously. One can assume that each pixel was exposed to the same motion. This is consistent with the theoretical analysis in Ref. 2. A much more complicated situation occurs in some systems where each pixel is exposed at a different time. 2.3. ITEX Series 2000 Image Processor The ITEX hardware receives the video signal from the camera and can either send it directly to the image display or encode it for processing and storage. The ITEX 2000 has special image processing hardware and firmware as well as a full library of C software. It is accessed and controlled through a VAX computer and all its functions are called from C . It has some local memory, but stores data on the VAX drives. Note that the ITEX uses an interlaced format. Every image that is sent to the display is actually the combination of two 20 ms pictures. It displays the first picture on even rows, and the second picture on odd rows. This gives a 40 ms image. It is simple enough for the computer to separate the two pictures, however, and use one or the other. In the work discussed here, the even rows were used. The resolution of the ITEX encoder is 512 x 256. It fills a 512 x 512 buffer using the interlaced method described earlier. Because the vibration table moves in the horizontal direction in these tests, advantage was made of higher horizontal resolution (in both the camera and the encoder). The accuracy of the encoder is 8 bits, which is 256 gray levels. 2.4. VAXstation II/GPX A microVAX workstation operates under VMS and is the user's interface to all the imaging hardware. Programs to use the ITEX 580 Initially an attempt was made to take a picture of the moving resolution chart, and to record the amount of motion d simultaneously. While the motion is being measured continuously, recording it during the exact interval that an image was being taken proved problematic . While the ITEX hardware uses the sync pulse of the camera to decide when to snap a shot, it does not send a signal out defining which sync pulse it began its picture. An attempt was made, using two cameras, to first photograph the chart and then the scope (where the motion is displayed). If there were a constant delay between the two pictures, it would have been possible to calculate d from the second picture. Unfortunately, the delay between the two images varies making this method impractical. Because of the problem in measuring d, the only way to obtain an estimate of d was by looking at the blurred image of the resolution chart. By assuming approximately linear motion and using a set of line stripes where the image is approximately uniformly gray, it is possible to estimate d, assuming that d is approximately equal to one resolution chart image stripe line width at this point. This method can be seen in Fig. 4 for a motion of 2 mm. This only gives an approximation ofd because only 1 1 sets of lines exist and at times the motion is nonlinear. In other words , the contrast becomes zero when d = 1/f, because at that point one black and white line pair appears uniformly gray. Using this method of calculating d, it is possible to correlate blur radius, MTF (sine wave response) and MCF (square wave response) for each image. Accordingly, software was written to calculate the MCF and MTF of each image. A standard image of the still resolution chart was used in this calculation. It was therefore not necessary to consider the MTF of the rest of the imaging system, because the only difference between the static image and the moving image was the motion itself. Using the results of this process it was possible to plot MTF, MCF, and sinc(irfd) from Eq. (6) for comparison purposes. The results of this experiment for blur radii d equal to the 1 1 different available resolution chart spatial line frequencies are shown in Figs. 5(a) through 5(k): The MTF is the noisy line that extends for the entire x-axis. This plot was made by dividing the FFT of the image of the vibrating resolution chart by the FF1.' of the image of the still resolution chart. It thus is a "noisy" version of the sine wave response. The MCF or square wave response is the dashed line. This is the modulation contrast of the vibrating image divided by the modulation contrast of the still image. The MCF is only taken at the frequencies conesponding to the 11 line pairs on the resolution chart. For large blurs, where only the widest line pair could be resolved, only one data point exists, because the MCF at all the other line pairs is zero (this is the case in Fig. 5). An ideal sinc function is also shown on the chart. The blur radius d chosen to plot the sinc(irfd) function on each graph is the width of the smallest line pair that / OPTICAL ENGINEERING / May 1991 / Vol. 30 No. 5 Downloaded from SPIE Digital Library on 30 Nov 2010 to 132.72.80.136. Terms of Use: http://spiedl.org/terms IMAGE RESOLUTION LIMITS RESULTING FROM MECHANICAL VIBRATIONS. PART 2: EXPERIMENT could be resolved. The estimate of d for which the sinc function was plotted was limited to a line width on the resolution chart. Although the MTF is a very noisy signal, the results shown in Fig. 5 clearly show that it is reasonably close to the predicted transfer function. The fact that the MTF is so jagged is an effect of using the FFT. This is a well known result due to the noise generated by the discreteness of the FFT.3 For the smallest and the largest blur radii [Fig. 5(k) and Fig. 5(a), respectively] the 2 mm 4mm >- MTF is not that close to the sinc function, especially for the smallest. This is because the use of the sinc function as an MTF here is based on the assumption of linear motion during a very short exposure of sinusoidal motion. However, when d is very small and approaches dmin, the implication is that the picture was taken at an extremum of the sine wave motion where the motion is highly nonlinear. Also, for too large d the assumption of linear motion and uniform velocity is inaccurate because of the relatively long exposure te/T that can include both an extremum and a linear portion of the sine wave. Consequently, we should expect that measured MTF in such cases is not quite identical to a sinc function. What is surprising is that despite the randomness it is not too much different from a sinc function. The sinc function is certainly a better approximation than the widely used Bessel function as shown in Fig. 6. The MCF (measured square wave response) is generally slightly offset from the MTF and the sinc function in Fig. 5 , but has roughly the same slope. This is probably due to the method used to calculate the MCF that chooses the minimum and maximum intensity points across each black-white line pair, thereby ignoring blurring that might occur at the edges of each white line, and therefore slightly overestimating MCF. The method used to calculate the FFT should be mentioned. A single array of data taken horizontally across the chart was analyzed. This means that the analysis is one-dimensional. The data beyond which resolution was zero (including false resolution) was blocked out. In other words, if only the first three line pairs up to 0.286 1pm could be resolved, all the data from the fourth line pair on was deleted (moving to the left). To keep the array 512 pixels long, so it could be used by the FFT, all the deleted pixels were filled with a white value. A comparison of measured MCF (square wave response) with MTF expressions in Eqs. (2) and (6) is shown in Fig. 6 where Eq. (2) is inappropriate because te < T0 and Eq. (6) is an approximation for low vibration frequency MTF. In Fig. 6 vibration frequency is a parameter and te 15 again equal to 20 ms. Despite the randomness of blur radius, square wave response is generally higher than sine wave response, as it should be. Of importance here is that square wave response is noticeably closer to the sinc function approximation than to the inappropriate Besselfunction, which has often been used in the past. In Fig. 5, te/T0 0.05. In Fig. 6, 0.02 < teIT0 < 0.08. Again, for the longest and shortest relative time exposures (te/T0), the sinc function MTF approximation in Fig. 6 is less accurate than for medium relative time exposures, as discussed with regard to Fig. 5. As te/T increases, blur radii increase and the spatial frequency content is more limited. The Bessel function in Eq. (2) is not a function of the random variable d but rather of D, which is constant. The sinc function MTF approximation is a function of d and therefore more closely resembles the measured MCF (Fig. 6) and MTF (Fig. 5) without noise. In general, the larger the blur radius, the closer the resemblance [H (a) r ' i . I kA t' ______ (b) Fig. 4. (a) unbiurred image: static images of 0.5 (left) and 1 (right) 1pm (or 0.25 and 0.5 1pm spatial frequencies), respectively. (b) effect of 2 mm blur radius (i.e., 2 mm movement during exposure) on 0.5 (left) and 1 (right) 1pm spatial frequencies. In the latter case, 0.5 1pm are reduced to one uniform shade of gray with zero contrast. dID decreases Eqs. (2) and (6). However, as d* because of relatively short exposures or time exposures centered between at extrema of the vibration [when d* approaches d1 in Eq. (4)], the sinc function becomes a better MTF approximation than the constant Bessel function. In any event, the blur radius is a random variable that can vary greatly even for a given exposure time, depending upon the portion of the vibrational sine wave function at which the exposure takes place. This randomness of the low-frequency sinusoidal motion MTF can be seen in Fig. 7. Here, T0 is the reciprocal of the vibration frequency and te 5 again 20 ms. Therefore, Figs. 7(a) and 7(b) represent MTF curves where te/T and d* are constant in each graph. Yet each curve in a given graph represents a different MTF corresponding to a different instant of time or portion of the sine wave, over which the exposure takes place. Thus, for low-frequency vibrations there is no unique MTF. Conclusions of these MTF measurements for short-exposure low frequency sinusoidal image motion are: 1. of the randomness of the instant of exposure, there is no unique MTF (Fig. 7). Because 2. In many short-exposure cases the sinc function MTF approximation for linear motion is a good, reasonable approximation for sinusoidal motion (Figs. 5 and 6). 3. When the sinc function MTF curve is less identical to actual MTF, it is still a lot better approximation at low mechanical frequencies than the widely used Bessel function (Figs. 6 and 7), which really is appropriate for high vibration frequencies only. OPTICAL ENGINEERING / May 1 991 / Vol. 30 No. 5 / 581 Downloaded from SPIE Digital Library on 30 Nov 2010 to 132.72.80.136. Terms of Use: http://spiedl.org/terms RUDOLER, HADAR, FISHER, KOPEIKA 0 2 C B 1.5 2 2 Spatial frequency (b) (a) 02 0 2 U- 5 I— 5 Spatial trequancy Spatial frequency (dl (c) U- 02 0 S I- 2 U- F- S Ot 0.3 0.2 Spatial trequency (e) (f) Fig. 5. Comparison of MTF (noisy solid curve), predicted MTF (sinc function prediction—solid curve), and measured MCF (square wave response—dashed curve) forvarious blur radii d. Spatial frequency is in lines per millimeter. 582 / OPTICAL ENGINEERING / May 1991 / Vol. 30 No. 5 Downloaded from SPIE Digital Library on 30 Nov 2010 to 132.72.80.136. Terms of Use: http://spiedl.org/terms IMAGE RESOLUTION LIMITS RESULTING FROM MECHANICAL VIBRATIONS. PART 2: EXPERIMENT IL C 0 U. 0.2 0.3 0.4 0.5 Spatiat frequency sp.t frequency (h) (9) .--- - j d0.9mm 25L 2 0 0 1.5 1' F h)i !l 051 0L____T... 04 06 vti.;Itt!It) Spatial frequency Spatial frequency (j) (I) 0 Spatial frequency (k) Fig. 5 continued. OPTICAL ENGINEERING / May 1 991 / Vol. 30 No. 5 / 583 Downloaded from SPIE Digital Library on 30 Nov 2010 to 132.72.80.136. Terms of Use: http://spiedl.org/terms RUDOLER, HADAR, FISHER, KOPEIKA —'— 1 .2 d=2.7mm 1 -_.= d = 1.8mm ''SiNC '\\\ 0.8- J'\ \ 0 0.8 2.5 \'\ \\ \ 0.6k 0 0.6 \\ '" 0.4 0.4 0.2 0.2 C 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 Spatial frequency Spatial frequency (a) (b) 1.2 .--lNCT_. \\ \'\\. d=l2mm SINC_______________— 1 " '\ 0.8 L 0.8 0 'N 0.6 \ \\ \,' 0.4k \\\ \\ 0 \:::.\ \ '\\ \\\\\ \ '\\ \. 0.4 I- 02 ---,, N\\ \ 0 ...----L.. 0.1 0.2 . 0.3 . . . . 0.4 0.5 0.6 0.7 0.9 Spatial frequency (c) 0—..--0 \\\\ \\, ' \ \ 0.2 \\ \\ \"\\ \ \ -.-- 0.8 \\\ N 0.2 - 0'— d=0.7mm , --\\ \ \ \ 06 1 0.4 0.6 0.8 . .—'---.-.-.-..-- 1 1.2 1.4 1.6 Spatial frequency (d) Fig. 6. Comparison of measured MCF (square wave response) with MTF expressions in Eq. (2) and Eq. (6) for different blur radii with vibration frequency as a parameter. Spatial frequency is in lines per millimeter. 4. LUCKY SHOT ANALYSIS A completely different method of measuring d was also used. In this process it was decided not to try and capture the image of the resolution chart, but just to photograph the scope display. The received image is just the path that the scope beam traced during the 20 ms exposure time. This approach is demonstrated for a 20 ms exposure time in Figs. 8(a) through 8(c). It is easy to see that although both traces in Figs. 8(b) and 8(c) are the same time length (x-axis), they have very different blur radii d(y-axis). By measuring the y-component of length of the trace, an accurate measure of d can be obtained. Instead of measuring d in millimeters or in volts, however, d can be measured by the 584 number of pixels occupied by the trace in the image. If a full cycle is then stored on the scope, D (the amplitude of the sine wave) can also be pictured and measured in pixels. Since it is only the relative blur d* that is of concern, it can be determined as (d pixels)/(D pixels). This leads to a fairly accurate method of measuring relative blur (d*). The one problem with this method is that because of interlace the accuracy of the measurement is 2 pixels at each end of the trace for a total accuracy of pixels. If the trace is small, less than 40 pixels, this error can become significant. One last problem with this method is that for small blur radii, when the beam does not travel very far, its image tends to "bloom", that is it gets slightly longer and thicker, because the beam is moving slowly and the CCD in- / OPTICAL ENGINEERING / May 1991 / Vol. 30 No. 5 Downloaded from SPIE Digital Library on 30 Nov 2010 to 132.72.80.136. Terms of Use: http://spiedl.org/terms IMAGE RESOLUTION LIMITS RESULTING FROM MECHANICAL VIBRATIONS. PART 2: EXPERIMENT MCF for 1 hz vibrations UC-, 0 (a) U- Spatial frequency -I_ (b) (a) (c) U- 0 Fig. 8. Various blur radii for a 20 ms exposure: (a) full cycle, (b) lucky shot, and (c) bad shot. 0 U- tegrates its luminance. This effect degrades further the accuracy Spatial frequency (b) of measurements for small values of d. Software was written to apply the scope trace method of measuring d. It allowed about 500 shots to be taken. This large number of shots is important so that a statistically valid number of samples can be taken. After 500 blur radii are measured for a specific te/T0, d* 5 calculated and then the probability of obtaining a lucky shot for a given value of d is calculated, where a lucky shot is an image with relative blur radius less than 4 Finally, the number of shots required to guarantee (with Q percent of confidence) such a lucky shot is derived. From the samples taken it is calculated P(d)=, U- 0 0 (7) where U- P(d) = d* d= Spatial frequency (c) b= B= Probability that d* < d relative blur desired maximum relative blur number of shots with d* < d total number of shots taken then (1 — Q) = [1 — P(d)1', where N is the number of shots required to have at least 1 shot where d* < d (a lucky shot) Fig. 7. Comparison of measured MCFs with MTF expressions in Eq. (2) and Eq. (6) for blur radii and relative time response (t/t0) constant in each graph where t = 20 ms: (a) T0 = 1 000 ms and (b) T 333 ms. Spatial frequency is in lines per millimeter. and Q is the desired confidence, finally giving ln(1 — Q) N= ln[1 — P(d)J (9) OPTICAL ENGINEERING / May 1991 / Vol. 30 No. 5 / 585 Downloaded from SPIE Digital Library on 30 Nov 2010 to 132.72.80.136. Terms of Use: http://spiedl.org/terms RUDOLER, HADAR, FISHER, KOPEIKA Vibration Platform vs. Theory Vibration Platform vs. Function Generator teIro •G Mc 0.05 2.5hz Q.=O.8 .* Fcn. Gen. (e!ro = 0.05 - Machine 2.5hz Q=o.8 -4- Theory 15 13 •1 C,) 0 0 (I) U) 0 0 .0 C) .0 z z 0 E E 11 9 7 5 3 0 05 0.25 0.15 0.35 0.05 0.25 C.15 0.35 Relative Blur Relative B(ur (b) (a) Fig. 9. Experimental comparison between vibration platform (machine) and function generator for lucky shot experimental analysis. Table 1 . Vibration frequencies and methods for experimental lucky shot analysis. FREOUENCY :tctQ VIBRATION SOURCE D(PIXELS) 2.5 Hz 0.05 Vibration Platform 114 2.5 Hz 0.05 Function Generator 106 5.0 Hz 0.10 FunctionGenerator 189 7.5Hz 0.15 FunctionGenerator 189 10.0 Hz 0.20 Function Generator 189 These results are compared with theoretical predictions in Ref. 2 to see how closely they agree. As mentioned above, the vibration platform was only capable of motion at one of the frequencies of interest (teIT0 0.05). To test other vibrations frequencies, it was necessary to use simulated vibrations supplied by the function generator. To validate this approach, the statistical results of actual vibrations were compared with the signal-generated pseudovibrations. They agreed very well, thus validating this approach. Table I shows at which frequencies and with what method data were taken. In each of these cases d was measured for 500 statistically independent shots. The amplitude of the sine wave D is also shown, measured in pixels. The results of the two 2.5 Hz experiments agreed closely both with theory and the function generator approach, as shown in Fig. 9, thus justifying the use of only the function generator for vibration frequencies . A software program was also written to simulate the picture taking process. This program used a 586 randomly generated starting exposure time t and measured change in sine wave amplitude during the chosen exposure time. A large number of samples can be generated quickly this way and compared with the theoretical vibration platform and function generator results. If all the data agrees, that verifies the simulation and the data can be used to study more complex functions , such as vibrations involving the sum of two sine waves. Graphs comparing the probability for a lucky shot using the different methods and theoretical predictions from Ref. 2 are shown in Figs. 10(a) through 10(h). All figures are for Q = 80% confidence. To be 80% certain to take at least one picture with a relative blur less than d0ID for a given relative exposure time teIT, one reads along the x-axis to that relative blur and finds the corresponding point on the y-axis to know how many shots must be taken. For example, using Fig. 9(a), with a 2.5 Hz sine wave and a camera that takes a 20 ms image, to be 80% certain that the relative blur is less than 0. 15 in at least one shot, both theory and experimental results predict that seven shots must be taken. As seen in Fig. 9 the theoretical lucky shot analysis is wellcorroborated experimentally. 5. AVERAGE BLUR RADIUS Reference 2 also predicts that for short-time exposure the average blur d will be 3.57Dte/T0. This proved incorrect as shown in Table 2. It is clear that the experimental values of d are about 12 to 15% higher than expected, and that this difference between theory and experiment varies with relative time exposure te/Tø, as shown in Fig. 1 1 . Accordingly, the theoretical model was / OPTICAL ENGINEERING / May 1 991 / Vol. 30 No. 5 Downloaded from SPIE Digital Library on 30 Nov 2010 to 132.72.80.136. Terms of Use: http://spiedl.org/terms IMAGE RESOLUTION LIMITS RESULTING FROM MECHANICAL VIBRATIONS. PART 2: EXPERIMENT reexamined and, by using MATLAB software to minimize least mean square error, the relative blur radius was determined to be Fig. 10 where d* is larger than Eq. (10) for short exposures. For longer exposures this trend becomes reversed. Figure 1 1 shows that Eq. (10) is quite close to the actual measurements of the average blur radius for relatively short exposures . Eq. (10) - I* _ . _ 3 7433 • teIT0 . (10) D - A comparison between measured d* and Eq. (10) is shown in does not explain all of the discrepancies in Table 2, but a good deal of them. The rest is attributed to experimental errors and to difficulty in measuring d* , including the uncertainty of 4 pixels described earlier. Equation (10) is also limited to short Function Generator vs. Theory (eITO 2.5 "1 0 (1) 0 0 .0 E z •G 0.05 h 0 0.8 Computer SimuLation vs. Theory Fcn. Gen. teTIO = 0.05 Theory 15 15 13 13 11 Cr, 11 C') 9 0 9 C) .0 7 E z ii HL1 7 5 5 3 3 0.05 0.15 0.25 Relative Blur (a) teIro 5.0 hz Co 0 0 .0 E z:3 0.10 Q 0.8 0.35 (b) Function Generator vs. Theory 0 •— Simulation C -C Relative Blur C, .o. Theory 2.5 hz Q = 0.8 Computer Simulation vs. Theory -a-- Theory te/TO= 0.10 5.0 liz 0 = 0.8 Fcn. Con. 14 14 12 12 10 C/, 0 -0- Theory Simulation 10 C') 8 0 8 C) .0 6 E z:3 6 4 4 2 2 0 0 0.7 RelatIve Blur (c) 0.1 0.2 0.3 0.4 0.5 Relative Blur 0.6 0.7 (d) Fig. 1 0. Lucky shot comparison between theory and experiment (continued on next page). OPTICAL ENGINEERING / May 1 991 / Vol. 30 No. 5 / 587 Downloaded from SPIE Digital Library on 30 Nov 2010 to 132.72.80.136. Terms of Use: http://spiedl.org/terms RUDOLER, HADAR, FISHER, KOPEIKA Function Generator vs. Theory Camputersimutation vs. Theory -°- Theory teTro 0.15 7.5 hz tefTO= 0.15 Fcn. Gen. 0 0.8 -a- fleocy Q = 0.8 7.5 hz Sirnutation 15 13 U) 0 0 -C -C 0 00 E 0 '11 C)) (1 9 C) .0 z: E z :3 7 5 3 0.8 0.6 0.4 0.2 0.2 1.0 0.6 0.4 Relative BLur (f) (0) Function Generator vs. Theory Computer Simulation vs. Theory 020 te/TO Theocy 10hz Qa0.8 1.0 0.8 Relative Blur te/TO = 0.20 -':3- Theory -4- Fcn. Gen. 10hz 0=0.8 .4-S Sknutation 13 11 Ct) 0 0 -C -C C') C)) 0 0 C) .0 .0 z:3 z C) 9 7 E E :3 5 3 I 0.3 0.5 0.7 0.3 0.9 Relative Blur 0.5 0.7 Relative Blur 0.9 (h) (g) Fig. 1 0 continued. exposures. It is clear that as te/Tø approaches unity, d must approach 2D, as seen in Fig. 1 . Of course, for such a long time exposure, the assumption of uniform motion is certainly not valid for a sine wave. vibration on image quality and support the MTF model developed there within the limitations illustrated in Sec. 3. The predictions of the number of shots required to get a lucky shot were found to be extremely accurate. Although the data diverge for small relative blur (or a large number of shots), this is not 6. CONCLUSIONS The graphs shown in Figs. 5 , 6, and 8 clearly validate the predictions in Ref. 2 concerning the influence of slow sinusoidal surprising for two reasons. The first is the problems involved in measuring small values of d accurately, as mentioned earlier. The second reason is that since there are fewer events with small 588 / OPTICAL ENGINEERING / May 1 991 / Vol. 30 No. 5 Downloaded from SPIE Digital Library on 30 Nov 2010 to 132.72.80.136. Terms of Use: http://spiedl.org/terms IMAGE RESOLUTION LIMITS RESULTING FROM MECHANICAL VIBRATIONS. PART 2: EXPERIMENT 7. ACKNOWLEDGMENT Table 2. Comparison of theoretical and average blur radii. FREOUENCY VIBRATION SOURCE MEASURED 3..3LOie/Io 3.24311e/T_o This research was partially supported by the Paul Ivanier Center for Robotics and Production Management. VibrationPiatfomi 23.5 20.3 21.34 2.5 Hz Function Generator 23.6 18.9 19.84 5.0 Hz Function Generator 79.3 67.5 70.75 7.5 Hz Function Generator 114 99.2 106.12 8. REFERENCES 10.0 Hz FunctionGenerator 151 135 141.5 1 2.5 Hz . T. Trott, ''The effects of motion in resolution,' ' Photogramm. Eng. 26, 819— 827 (1960). 2. D. Wulich and N. S. Kopeika, "Image resolution limits resulting from mechanical vibrations," Opt. Eng. 26, 529—533 (1987). 3. F. Wahl, Digital Image Signal Processing, Artech House, Boston, 1987. N. S. Kopeika received the BS, MS. and Ph.D. degrees in electrical engineering from the University of Pennsylvania, Philadelphia, in , ,, 'a ' j t:'t.. tion of such devices for detection and recording of millimeter wave holograms. In 1973 he joined the Department of Electrical and Com,t -, . . .1 puter Engineering, Ben-Gurion University of the Negev, Beer-Sheva, Israel, where he is a professor and department chairman. During 1978-1979 he was a visiting associate professor in the department of Electrical Engineering, University of Delaware, Newark. His research interests include atmospheric optics, effects of surface phenomena on optoelectric device properties, optical communication, electronic properties of plasmas, laser breakdown of gases, the optogalvanic effect, electromagnetic wave-plasma interaction in various portions of the EM spectrum, and utilization of such phenomena in EM wave detectors and photopreionization lasers. He has published over 70 journal papers and has been particuIarly active in research of time response and impedance of properties of plasmas. In addition, he is the author of a general unified theory to explain EM wave-plasma interactions all across the electromagnetic spectrum. Recently, he has contributed towards characterizing the open atmosphere in terms of a modulation transfer function with which to describe effects of weather on image propagation. Kopeika is a Senior Member of IEEE and a member of SPIE, OSA, and the Laser and Electrooptics Society of Israel. . te/To Fig. 11. Comparison between average relative blur radius d* in Eq. (10) (lower curve) and experimental measurement (upper curve). values of d, the statistics are less valid at this point. If a larger number of samples were taken, the results likely would converge slightly for smaller relative blur. The theoretical prediction for average blur radius was fairly close to the experimental measurement, with some undershooting of it. A revised and more accurate value is described by Eq. (10). , 1966, 1968, and 1972, respectively. His Ph.D. dissertation, supported by a NASA Fellowship, dealt with detection of millimeter waves by glow discharge plasmas and the utiliza- t OPTICAL ENGINEERING / May 1 991 / Vol. 30 No. 5 / 589 View publication stats Downloaded from SPIE Digital Library on 30 Nov 2010 to 132.72.80.136. Terms of Use: http://spiedl.org/terms