"t
>
W
/
i
I
FANUC AC SPINDLE SERVO UNIT
i
\
\
MAINTENANCE MANUAL
A
V
I
1
J
i
i
;
V
v
/
//
*
I
v
i
9
9
m
/
B-53425E/09
©FANUC
I
LTD, 1981
)
VJT
This manual describes the following products:
Name of products
Abbreviation
FANUC AC SPINDLE SERVO UNIT MODEL
1
MODEL
1
FANUC AC SPINDLE SERVO UNIT MODEL
2
MODEL
2
FANUC AC SPINDLE SERVO UNIT MODEL
3
MODEL
3
FANUC AC SPINDLE SERVO UNIT MODEL
6
MODEL
6
FANUC AC SPINDLE SERVO UNIT MODEL
8
MODEL
8
FANUC AC SPINDLE SERVO UNIT MODEL 12
MODEL 12
FANUC AC SPINDLE SERVO UNIT MODEL 15
MODEL 15
FANUC AC SPINDLE SERVO UNIT MODEL 18
MODEL 18
•fr-
FANUC AC SPINDLE SERVO UNIT MODEL 22
MODEL 22
FANUC AC SPINDLE SERVO UNIT MODEL 30
MODEL 30
FANUC AC SPINDLE SERVO UNIT MODEL AO
MODEL AO
FANUC AC SPINDLE SERVO UNIT MODEL IS
MODEL IS
FANUC AC SPINDLE SERVO UNIT MODEL 1.5S
MODEL 1.5S
FANUC AC SPINDLE SERVO UNIT MODEL 2S
MODEL 2S
FANUC AC SPINDLE SERVO UNIT MODEL 3S
MODEL 3S
FANUC AC SPINDLE SERVO UNIT MODEL 2K
MODEL 2H
FANUC AC SPINDLE SERVO UNIT MODEL 2VH
MODEL 2VH
-
1
AC SPINDLE SERVO
UNIT series
1
In this manual we have tried as much as possible to
describe all the various matters.
However, we cannot describe all the matters which must not
be done, or which cannot be done, because there are so
1Vi
many possibilities.
Therefore, matters which are not especially described as
possible in this manual should be regarded as “impossible”.
A
. -
im
--*-V
\
X
'•
V
*
CONTENTS
AC SPINDLE SERVO UNIT (200/220V AC INPUT)
I.
.
1
...
3
3
OUTLINE
Structure
1.1
7
7
7
7
7
8
DAILY MAINTENANCE AND MAINTENANCE TOOLS
2.1 AC Spindle Motor
2.2 AC Spindle Servo Unit
2.3 Maintenance Tools
2.3.1 Tools used for adjustment
2.4 Major Maintenance Parts
2.
.
3.
-
TROUBLESHOOTING
Power Voltage Check
Power On Indicator Lamp OIL does not Light
Alarm Lamp Lights .on PCB
Motor does not Rotate, or Motor does not Rotate the Specified
Revolutions
3.5 Vibrations or noises are Noticeable during Rotation
3.6 Abnormal Noise is Produced from Motor during Deceleration
3.7 Speed Overshooting or Hunting Occurs
3.8 Cutting Power is Low
3.9 Orientation is not Correct
3.10 Acceleration/Deceleration Time is Long
3.1
3.2
3.3
3.4
.
...
...
4.
i
30
30
30
30
31
31
31
31
SETTING AND ADJUSTMENT
5.1 Setting of Unit and PCB
5.2 Setting and Adjustment of Spindle Orientation Control Circuit
32
32
.
37
Option
6.
38
EXCHANGE METHODS OF FUSES AND PCB
6.1 Exchange of Fuses
6.2 Exchange of PCB
6.2.1 MODEL 1/2/ small MODEL 3
40
6.2.2 MODEL 3
6.3 Exchange of Spindle Orientation Control Circuit PCB
6.3.1 MODEL 1/2/small MODEL 3
6.3.2 MODEL 3 - 40
38
40
40
42
43
43
44
-
7.
27
27
27
28
28
28
29
INSTALLATION
4.1 Installation Procedure
4.2 Power Connection
4.2.1 Power voltage and capacity check
4.2.2 Protective earth connection
4.2.3 Power connection
4.3 AC Spindle Motor Connection
4.4 Signal Cable Connection
....
5.
9
9
11
12
.
SPINDLE ORIENTATION CONTROL CIRCUIT
7.1 Configuration
7.2 Adjustment of Position Coder System Spindle Orientation
Control Circuit
7.2.1 Setting and adjustment of spindle orientation control circuit
;
1
in 2-step spindle speed change
.
45
45
46
J
X»
46
•1
J
Setting and adjustment’ for spindle orientation control circuit
3 or 4 step spindle speed change
7.3 Adjustment of Magnetic Sensor Spindle Orientation
Control Circuit
7.3.1 Mounting method of magnetizing element and magnetic sensor
7.3.2 Setting and adjustment of spindle orientation control circuit
in 2-step speed change spindle for standard type
7.3.3 Setting and adjustment of spindle orientation control circuit
in 2-step spindle speed for high speed
7.3.4 Setting and adjustment of spindle orientation control circuit
in case of 3-step spindle speed change
7.3.5 Method of checking the spindle position loop gain
7.2.2
...
55
55
56
63
70
74
AC SPINDLE SERVO UNIT (380/4 15V AC INPUT TYPE)
II.
1.
OUTLINE
Configuration
77
77
2.
DAILY MAINTENANCE AND MAINTENANCE TOOL
77
3.
INSTALLATION
77
1.1
4.
SETTING AND ADJUSTMENT
Setting on PCB
78
78
TROUBLESHOOTING AND COUNTERMEASURE
81
...
4.1
5.
DIGITAL AC SPINDLE SERVO UNIT (MODEL 3
III.
I
1.
-
22)
I-
85
85
OUTLINE
Configuration
1.1
.
>
•.
%
2.
DAILY MAINTENANCE AND INSTRUMENTS FOR MAINTENANCE
86
3.
INSTALLATION
86
.
4
.
52
’
SETTING
5.
t
6.
7.
--
87
87
88
96
...
4.1 Method of Parameter Setting
4.2 Number and Contents of Parameter
4.3 Rank at Setting
4
TROUBLESHOOTING AND COUNTERMEASURE
98
»
•
tf
.METHOD OF REPLACEMENT OF FUSE AND PRINTED CIRCUIT BOARD
100
100
SPINDLE ORIENTATION CONTROL CIRCUIT
T
1
*
DIGITAL AC SPINDLE SERVO UNIT (MODEL IS, 1.5S, 2S, 3S, 2H, 2VH)
IV.
.
1
OUTLINE
1.1
*
Configuration
\
103
103
2.
DAILY MAINTENANCE AND MAINTENANCE TOOL
104
3.
INSTALLATION
104
i
4.
105
SETTING
4.1 Parameter Setting Method
4.2 Number and Content of Parameter
4.3 Setting Rank
4.4 Setting Method of Short Pin
4.5 Adjustment Method of Variable Resistor
105
106
113
114
115
5.
TROUBLESHOOTING AND COUNTERMEASURE
116
6.
REPLACEMENT METHOD OF FUSE AND PCB
117
7.
SPINDLE ORIENTATION CONTROL CIRCUIT
117
APPENDIXES
APPENDIX 1
CONNECTION DIAGRAMS
121
APPENDIX 2
CABLE ENTRANCE DIAGRAM
132
APPENDIX 3
CABLE SPECIFICATIONS
134
APPENDIX 4
MAIN CIRCUIT DIAGRAM
139
4.1 Main Circuit
139
MOUNTING LAYOUT OF SPINDLE SERVO UNIT PARTS
(OTHER THAN PCB)
142
APPENDIX 6
MOUNTING LAYOUT OF SPINDLE CONTROL CIRCUIT PCB
151
APPENDIX 7
MAJOR PARTS LIST
158
APPENDIX 8
PCB ADJUSTMENTS
161
APPENDIX 5
uAPPENDIX 9 CHECKING METHOD FOR PCB
1. Check Terminal
2. Check Terminal Data Confirmation Method
3. Digital AC Spindle (MODEL 3 to 22)
4. Digital AC Spindle (MODEL IS, 1.5S, 2S, 3S, 2H, 2VH)
APPENDIX 10
1.
2.
MAGNETIC SENSOR SIGNALS CHECKING METHOD
Application
Check Procedure
APPENDIX 11
PARAMETER LIST FOR DIGITAL AC SPINDLE SERVO UNIT
168
168
176
180
184
187
187
187
190
t
I.
AC SPINDLE SERVO UNIT
(200/220 V AC INPUT)
X
, /‘J
’ •t
1.
OUTLINE
This manual describes maintenance of AC SPINDLE SERVO UNIT and its options.
(For applicable units of this manual, see Table 1.1 (a),(b))
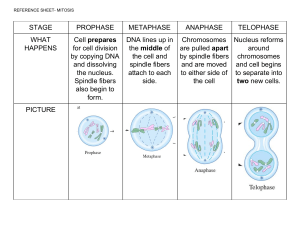
1.1 Structure
The AC SPINDLE SERVO UNIT consists of the following units and parts.
P) Unit
(basic)
(1) Spindle control unit
2 PCB
3) ROM
(basic)
(2) Resistance unit *1
(basic)
(3) Fuses (for spare)
connections)
(basic)
(4) Connectors (for
(option)
(5) DA converter
(option)
(6) Power transformer
(7) Spindle orientation control circuit (option)
(8) Speed gain selection control circuit (option)
(9) Spindle selection control circuit
(option)
(10) Unit cover *2
(option)
(11) Unit adapter *2
(option)
(12) Fan unit *3
(option)
3
-
AC spindle servo unit
*1
(Basic)
r
I
i
i
I-—1
I
Resistance unit
1
Magnetics
cabinet
sequence
i
Connectors
1“
Spindle
control
I
J
unit
Fuses
NC
AC
spindle
motor
(Option)
I
I
Spindle orientation
control circuit
D/A
converter
Speed gain
selection
control circuit
Unit cover
Unit
adapter
Spindle selection
control circuit
Fan unit
T
I
I
3-phase
power supply
Power transformer
(option)
1/2/small
*1:
The resistance unit is employed for MODEL
(A06B-6052-H001, H002, H003) only.
*2:
These options are used for MODEL 8 and 12 (A06B-6044-H108, HI 12) only.
*3:
This fan unit is used for MODEL 30 and 40 (A06B-6044-H130, H140) only.
Fig 1.1 Block diagram
4
-
type 3
Table 1.1 (a) Major components (basic)
MODEL of AC
spindle servo unit
External
Standard
radiation type
type
External
radiation type
Applicable AC
spindle motor
specification
drawing number
ROM
PCB
Standard
Specified number
type
Type
A06B-6052-H001
A06B-6052-C001
A16B-1100-0080
A16B-1100-0090
A06B-6052-C501
J21
A06B-1001-B100 ,-B200
MODEL 2
A06B-6052-H002
A06B-6052-C002
A16B-1100-0080
A16B-1100-0091
A06B-6052-C502
J22
A06B-1002-B100 ,-B200
A06B-6052-H003
A06B-6052-C003
A16B-1100-0080
A16B-1100-0092
A06B-6052-C503
J23
A06B-070A-B001,-B002
A06B-1003-B100.-B200
MODEL 3
A06B-60AA-H203
A06B-60AA-H007
A06B-60AA-H103
A06B-60AA-C203
A06B-60AA-C008
A06B-60AA-C103
A20B-0009-0530
A20B-1000-0690
A06B-60AA-C507/J10 J10
MODEL 6
A06B-60AArH206
A06B-60AA-H008
A06B-60AA-H106'
A06B-60AA-C206
A06B-60AA-C008
A06B-60AA-C106
A20B-0009-0531
A20B-1000-0691
A06B-60AA-C508/J11 Jll
A06B-0707-B001 ,-B002
A06B-1006-B100 ,-B200
High-speed MODEL 6
A06B-60AA-H260
A06B-60AA-H009
A06B-60AA-B160
A06B-60AA-C208
A06B-60AA-C009
A06B-60AA-C108
A20B-0009-0532
A20B-1000-0692
A06B-60AA-C521
J7A
A06B-1006-B903 ,-B90A
MODEL 8
A06B-60AA-H208
A06B-60AA-H010
A06B-60AA-H108
J02
A06B-0706-B001 f-B002
A06B-1008-B100, -B200
MODEL 12
A06B-60AA-H2 12
A06B-60AA-H112
A06B-60AA-C212
A06B-60AA-C010
A06B-60AA-C112
A20B-0009-0533
A20B-1000-0693
A06B-60AA-C510
J03
A06B-0705-B001 ,-B002
MODEL 15
A06B-60AA-H023
A06B-60AA-H0 11
A06B-60AA-C017
A06B-60AA-C011
A20B-0009-053A
A06B-60AA-C511
J0A
A06B-0708-B001,-B002
A06B-1015-B100 ,-B200
MODEL 18
A06B-60AA-H03A
A06B-60AA-H016
A06B-60AA-C019
A06B-60AA-C012
A20B-0009-0538
A06B-60AA-C516
J05
A06B-0709-B001 ,-B002
MODEL 22
A06B-60AA-H027
A06B-60AA-H017
A06B-60AA-C018
A06B-60AA-C013
A20B-1000-0539
A06B-60AA-C5 17
J06
A06B-07 10-B001 ,-B002
Ln
I
Unit number
MODEL 1
Small type MODEL 3
I
Specification number
A06B-60AA-C509
*
A06B-1012-B100 , -B200
MODEL 30
A06B-60AA-H130
A06B-60AA-C130
A20B-1000-0700
A06B-60AA-C536
J07
A06B-1030-B100 ,-B200
MODEL AO
A06B-60AA-H1 A0
A06B-60AA-C1 A0
A20B-1000-0701
A06B-60AA-C529
J08
A06B-10A0-B 100 ,-B200
Note 1) Mounting parts of PCB A20B-0009-0530 - 0539 are identical to each other,
but their setting and adjustment differ from each other.
0693 are identical to each other,
Note 2) Mounting parts of PCB A20B-1000-0690
but their setting and adjustment differ from each other.
0701 are identical to each other,
Note 3) Mounting parts of PCB A20B-1000-0700
but their setting and adjustment differ from each other.
0092 are identical to each other,
Note A) Mounting parts of PCB A16B-1100-0090
and adjustment differ each other.
Note 5) The ROM mounting position shows MD25 (MH28 in case of A16B-1100-0080)
(See appendix 6 PCB parts wiring diagram)
Note 6) The ROM type is indicated as shown in the right figure.
-
except for ROM,
except for ROM,
J02
except for ROM,
001 D
ROM type
ROM edition
but their setting
ROM address
Table 1.1 (b) Order specification
Name
Specification No.
(BCD)
A06B-6041-J031
D/A
converter
D/A
converter (BINARY)
PCB No.
A06B-604 1-J032
Orientation AS
(Position coder type, 2-stage
speed change gear spindle)
A06B-6052-J110
A20B-0008-0240
Orientation BS
(Position coder type, 2-stage
speed change gear spindle)
A06B-6052-J111
A20B-0008-024 1
Orientation CS
(Magnetic sensor type, 2-stage
speed change gear spindle)
A06B-6052-J120
A20B-0008-0030
Orientation GS
(Magnetic sensor type, 2-stage
speed change gear spindle)
A06B-6052-J122
A20B-0008-0031
Speed gain selection control
circuit
A06B-6052-J701
A16B-1700-0020
A06B-6041-J110
A20B-0008-0240
A06B-6041-J111
A20B-0008-0241
Orientation C
(Magnetic sencer type,
2-stage speed change gear spindle)
A06B-6041-J120
A20B-0008-0030
Orientation D
(Magnetic sencer type,
2-stage speed change gear spindle)
A06B-6041-J121
A20B-0009-0520
Orientation E
(Position coder type,
4-stage speed change gear spindle)
A06B-6041-J130
A20B-1000-0460
A06B-6041-J131
A20B-1000-0461
Orientation G
(Magnetic sencer type,
2-stage speed change gear spindle)
A06B-6041-J122
A20B-0008-0031
Speed gain selection control
circuit
A06B-6044-J701
A16B-1700-0020
0)
c.
t-H
—njI
i
E
in
CM
r—H
HJ
n
c
2:
Orientation A
(Position coder type,
2-stage speed change gear spindle)
Orientation B
(Position coder type,
2-stage speed change gear spindle)
Orientation F
(Position coder type,
4-stage speed change gear spindle)
6
2. DAILY MAINTENANCE AND MAINTENANCE TOOLS
Check and clean the following items once every 6 months or so for using the AC
spindle motor and AC spindle servo units under a normal condition for a long
time.
Take the check frequency into consideration according to the contamination
degrees in each item.
2.1 AC Spindle Motor
If the ventilation hole, cooling fan, and fan finger guard (net) of the AC
spindle motor become dusty, the radiation efficiency of the motor drops. Clean
the AC spindle motor by using the factory air and a vacuum cleaner.
2.2 AC Spindle Servo Unit
Since a cooling fan is mounted at the upper part of the servo unit, its nearby
resistor and other parts become dusty after a long-time use. If they are dusty,
clean them using the vacuum cleaner or the like.
2.3 Maintenance Tools
2.3.1 Tools used for adjustments
Use tools indicated in Table 2.3.1 (a)
Table 2.3.1 (b) for repairing troubles.
for adjustments and tools indicated in
Table 2.3.1 (a) Tools used for adjustments
Specification
Name
AC Voltmeter
1
300 V +2% or less
<\»
Use
AC power voltage
measurement
©, ©
screwdrivers
©
©
large, medium size
large, medium, small
size
Table 2.3.1 (b) Tools used for repairing troubles
AC Voltmeter
Use
Specification
Name
1
300 V +1% or less
AC power voltage
measurement
DC voltmeter
1 mV
less
'v,
500 V +1% or
DC power voltage
measurement and offset
voltage check
Resistance value check
Circuit tester
©, ©
screwdrivers
©
©
large, medium size
large, medium, small
size
7
-
2.4 Major Maintenance Parts
For maintenance parts, see appendix 7 Major maintenance parts.
-8-
3.
TROUBLESHOOTING
Perforin troubleshooting, referring to each item in Table 5
trouble conditions if a trouble occurred.
(b)
according to
Table 5 Sort of trouble conditions
Reference
item
Trouble conditions
Item
1
Power voltage check
3. 1
2
Power ON indicator lamp PIL does not light.
3.2
3
Alarm lamp does not light on PCB.
3.3
4
Revolutions are not as specified.
3.4
5
Motor does not rotate.
3.4
6
Vibrations and noises are noticeable during rotation.
3.5
7
An abnormal noise is produced from motor during deceleration.
3.6
8
Motor speed overshoots or hunting occurs.
3.7
9
Cutting power drop
3.8
10
Spindle orientation is not correct.
3.9
11
Acceleration/deceleration time is longer than specified.
3. 10
3.1 Power Voltage Check
Check AC power voltage and DC power voltage on PCB check terminals and standard
values are as specified in Table 3.1.
Table 3.1 Power voltage check
AC power voltage check
DC power voltage check
on PCB
Check at INPUT terminals R,S,T (See 4.2)
Voltage
Check terminal
Standard value
+24 V
+24 V
-
0 V
About 25 V +10%, ripple
about 0.5 V
+15 V
+15 V
-
0 V
+15 V +4%
(Not adjustable)
+5 V
+5 V
-
0 V
+5 V +1%
-
0 V
-15 V
-15 V
9
-
(Adjustable by RV15)
-15 V +4%
(Not adjustable)
Check terminal positions
a
c
N
®
24V
LT
5 ® OV
+5V
®+l 5 V
0-15V
®
a
C
N
6
CN9
0-1 5
®0V
® +5
0 +1 5
®+2 4
|C
N,
a
LT
4
a
CN1
CN2
CN1
CN3
I [cN3l
Model 3
Model 1, 2, small 3
|CN2[
LT
~ 40
4
i
I
10
-
3.2 Power ON Indicator Lamp OIL does not Light
Table 3.2 Check procedure and remedy
Causes
Item
Remedy-
Check procedure
1
AC power is not
supplied
Check it at power
input terminals R,S,T.
2
Fuse F4 is blown out.
See appendix 5.
Replace F4 (5A)
3
Fuses AF1, AF2, and
AF3 are blown out.
Check if alarm indi¬
cations of fuses AF1,
AF2, AF3 appear. See
appendix 5.
Replace fuses AF1, AF2,
AF3. Replace PCB, if
these fuses are blown
out again soon after
replacing them.
4
PCB connectors CN6 and
CN7 are not plugged
Check if the connector
guide groove appears on
the PCB connector
surface
Insert connectors
correctly.
Check voltage at check
terminals 19A-CT and
I9B-CT of PCB.
Measuring voltage
values should be about
AC 19 V between these
terminals
Replace transformer TF.
Lamp PIL is lit by +5 V
and -15 V.
Check power voltage
according to Table 3.1.
Replace PCB.
.
correctly.
5
Neither 19A nor 19B is
output because of
defective transformer
TF.
.
.
.
6
PCB power circuit is
defective
.
Note) Item 2 and 3 differ in AC spindle servo unit model
1/2/small model
3 as
follows.
Item'
Causes
Check procedure
Remedy
.
2
Fuse FI is blown out.
FI is mounted on the
lower PCB. See
appendix 6.
Replace FI (5A)
3
Fuse AF1 or fuse
resistors FR1, 2 are
Check if alarm indi¬
cation of fuse AF1
appears or not. See
appendix 6.
Replace fuse AF1 or
fuse resistors FR1, 2.
Replace PCB, if these
parts are blown out
again soon after
replacing them.
blown out.
11
1
3.3 Alarm Lamp Lights on PCB
An alarm is displayed by four binary codes using LEDs mounted on PCB as shown in
Table 3.3.
8
4
1
1
I--
2
1
I
I
Alarm display LED
oooo
ALARM CODE
Fig. 3.3 (a)
Table 3.3 (a) Contents of alarms
(T)
Alarm contents in AC spindle servo unit model
1/2/small model 3.
Alarm display (o: Light)
No.
Contents of alarms
8
4
1
2
1
i*
o
2
o
3
o
6
o
o
7
o
o
8
o
9
o
Motor is overheated (thermostat operates).
Speed is deviated from the command value
due to overload and others.
o
Regenerative circuit is faulty.
The motor speed exceeds the maximum rated
speed (analog system detection).
o
The motor speed exceeds the maximum rated
speed (digital system detection)
.
Power voltage is higher than specified.
o
Radiator for power semiconductors is
overheated.
10
o
o
11
o
o
12
o
o
13
o
o
14
o
o
+15 V power voltage is abnormally low.
o
DC link voltage is abnormally high.
DC link current is flows excessively.
o
CPU and peripheral parts are defective.
ROM is defective.
o
r
12
-
I
(?)
Alarm contents in MODEL 3-40.
Alarm display (o: Light)
Contents of alarms
No.
8
4
2
1
1
o
2
o
3
o
Motor is overheated (thermostat operates).
Speed is deviated from the command value
due to overload and others.
o
Fuse F7 in DC link is blown out.
Fuses FI, F2, or F3 in AC input circuit
are blown out.
4
o
5
o
6
o
o
7
o
o
o
Fuse AF2 or AF3 on PCB is blown out._
The motor speed exceeds the maximum rated
speed (analog system detection).
o
The motor speed exceeds the maximum rated
speed (digital system detection).
Power voltage (+24 V) is higher than
specified.
8
o
9
o
10
o
o
11
o
o
12
o
o
13
o
o
14
o
o
o
15
o
o
o
o
Radiator for power semiconductors is
overheated.
+15 V power voltage is abnormally low.
o
DC link voltage is abnormally high.
DC link current is flows excessively.
o
CPU and peripheral parts are defective.
ROM is defective.
o
Option circuit is in trouble.
13
-
1) Alarm No.
|T]
Motor is overheated.
Causes
Item
1
Built-in fan motor of
spindle motor is
defective.
2
Overload operation
Check procedure
Remedy
Replace fan motor.
Check it using a load
meter.
3
Motor cooling system
is dirty.
4
Disconnection or poor
contact of wiring
2) Alarm No.
f2l
1
Clean it using
compressed air or
vacuum cleaner.
Check connections
between motor and servo
unit.
Confirm the connection
of connector for
signal.
Speed is deviated from the command value.
Causes
Item
Re-examine cutting
conditions and tools.
Overload
Check procedure
Remedy
Check it using a load
meter.
Re-examine cutting
conditions and tools.
2
Transistor module is
defective.
Transistor collectoremitter is open.
Replace transistor
module.
3
Blow out of fuse in
regeneration circuit.
Check fuses F5 and F6
for continuity by using
a circuit tester.
ation/deceleration
..
4
Blow out or poor
connection of the
driver protective
fuse on PCB.
Check fuses FA, FB,
FG for blown out or
missing.
5
Speed feedback signal
is defective.
Check the speed feed¬
back signal level.
6
Wiring failure
(disconnection, poor
contact, etc.)
Check if connection
cables are normally
connected.
Check if the acceler¬
on
cycle is to frequent.
Replace fuses.
Connect fuses securely,
and replace blown out
fuses, if any.
Adjust RV18 and RV19.
Set duty to about 50%.
Note 1) Speed feedback signal check
Observe the speed feedback signal using an oscilloscope under the rota¬
tion command off (motor stop, drive power off) condition after turning
on the power supply. Observe it at the following check terminals, while
slowly turning the motor by hand.
14
-
Normal wave form6
Check terminals
CH3-0V
(PA)
CH4-0V
(PB)
CH5-0V
(RA)
CH6-0V
(RB)
CH7-0V
Vp-p= 0.36
0.5 v
About 2.5V
OV-
Same as shown above
DC 2.5 V +0.2 V
Same as shown above
(Adjus! RV18)
CH7
0V
CH8-0V
4.5 V
CH8
(In case of CW rotation)
—
t
-4r_
0
(Adjust RVI9)
v
(Duty : 504)
(CH7 and CH3 signals are inverted in
CCW direction.)
0.4 V
3) Alarm No. [3]
(T) MODEL 1/2/small MODEL 3 regenerative circuit is faulty.
In MODEL 1/2/small MODEL 3, alarm No. 3 indicates that the regenerative
circuit is faulty. A transistor may be defective.
Locate a defective element, and replace it according to the following
procedure.
Replace PCB if a transistor is faulty due to a trouble of control PCB.
Please contact our service center, if repair is difficult.
«_
15
-
Procedure
Description
1
Turn off AC power supply (turn off the magnetics cabinet breaker)
and disconnect the motor power cable.
2
Remove two screws of the plate which fixes the upper PCB, and
check the resistance values of the transistor collector (CG)emitter (EG), collector (CG)-base (BG) , and base (BG)-emitter (EG)
of lower PCB, respectively.
(See appendix 6 PCB mounting drawing)
/fill
o
\IM
BG
CG
EG
CG
EG
BG
Criteria (when circuit tester is set to xlOft range)
Check
terminal
C-E
Circuit tester
Normal
terminal
Connect C to
Several 100ft
Short, infinite
Connect C to
terminal
Infinite
Short, several
loon
Connect C to
Several 100ft
Short, infinite
Infinite
Short, several
100ft
Several 100ft
Short, infinite
Several 100ft
Short, infinite
+
terminal
C-B
+
terminal
Connect C to
B-E
Faulty
terminal
Connect B to
+
terminal
Connect B to
-
terminal
If a transistor is broken, the collector-emitter and collectorbase are shorted, respectively.
3
Remove the screws of the lower PCB and short bar holder, and
replace faulty parts. Apply silicon grease without fail when
replacing parts.
4
After replacement, reset the lower PCB and short bar holder as
before, and check the circuit according to procedure 2.
I
16
-
Procedure
Description
5
Check regenerative transistor driver circuit of lower PCB.
(T) Turn on AC input power supply. Don't apply any rotation
commands (SFR,SRV).
(2) Measure the BG-EG voltage by using a circuit tester (2ÿ5 V
range). Particularly be careful not to receive any electric
shock, since a high voltage (DC 300 V) is applied nearby.
jCriteria]
A faulty circuit can be checked at glance, since it is
different from other normal circuits.
Base-emitter voltage (based on emitter)
Normal
About -0.8 V
-1.3 V
Faulty
About
0.0 V
-0.8 V
If a PCB was confirmed to have been faulty, check if the fuse on
driver circuit is blown out or not by using a circuit tester.
If the fuse is blown out, replace it and check the circuit again to
make sure that the trouble has been recovered.
6
Fix two screws of the plate which fixes the upper PCB.
7
Connect the motor power cable and start operation again.
(2)
40 DC link fuse (F7) is blown out.
MODEL 3
40, alarm No. 3 indicates that the DC link fuse (F7) is
In MODEL 3
blown out.
In this case, a transistor module may be defective.
Locate and replace the defective element according to the following
procedure.
Replace PCB if the transistor module may be faulty due to a trouble of
the control PCB.
Please contact FANUC service center, if repair is difficult.
(The fuse name is F4 in MODEL 30 and 40)
Procedure
1
Description
Turn off AC power supply (turn off the magnetics cabinet breaker)
and disconnect the motor power cable.
17
-
Procedure
Description
2
Remove PCB and check the resistance values of the transistor
module collector (Cl ,C2)-eraitter (E1,E2), connector (Cl,C2)-base
(B1,B2) and base (Bl,B2)-emitter (E1,E2), respectively.
/
CM
(+)
A
Ex]
@
© ©
HU
H
y© © ©
u
H
CQ
PQ
CM
CM
U
rH
©
$
/
CQ
<N
CQ
Notch
r.
Criteria (circuit tester range xlOft)
Terminal
to be
observed
C-E
Circuit tester
Normal
terminal
Connect C to
Faulty
Several 100J2
Short, infinite
Infinite
Short, several
loon
Connect C to
+ terminal
Several 100ft
Short, infinite
Connect C to
Infinite
Short, several
100ft
Several 100ft
Short, infinite
Several 100ft
Short, infinite
4- terminal
Connect C to
C-B
B-E
terminal
terminal
Connect B to
+
terminal
Connect B to
-
terminal
If a transistor is broken, the collector-emitter and collectorbase are shorted, respectively.
Apply a coat of silicon grease without fail
3
Replace faulty parts.
when replacing them.
4
After replacement, recheck the circuit according to procedure 2.
I
18
-
I
\
Description
Procedure
5
Check the transistor drive circuit on PCB.
(T) Remove DC link fuse F7 and turn on AC input power supply.
Don't' apply any rotation commands (SFR,SRV).
the base-emitter voltage of eight transistors (U,V,W
Measure
(2)
regenerative control circuits) (at connectors CN6,7) by using a
5 V range).
circuit tester (2
Particularly be careful since a high voltage (DC 300 V) is
applied to CN6 and CN7. Be careful not to damage any connector
when checking the connector using the probe.
[Criteria!
A faulty circuit can be checked at glance, since it is different
from other normal circuits.
Base-emitter voltage (based on emitter)
Normal
About -0.8 V i -1.3 V
Faulty
About
0.0 V
%
-0.8 V
Connector CN6 terminal
1
2
5C
3
5B
4
5E
5
6C
6
7
6B
6E
8
7C
9
7B
10
7E
11
8C
12
8B
13
8E
14
15
-i
Conneetor CN7 terminals
1
1C
2
IB
3
IE
4
2C
5
2B
6
2E
7
3C
8
3B
9
3E
10
4C
11
12
4B
4E
13
14
15
%
/; •: 1
V
(References)
The following figure indicates waveforms undeT' normal and
abnormal conditions. Refer to these waveforms, when it is
difficult to check a trouble by using a circuit tester.
Be careful since a high voltage (about DC 300 V) is applied
to CN6 and CN7.
-H
Apply normal rotation and reverse rotation commands.
(The velocity command is Orpm)
Observe the base-emitter' waveform of each transistor (U,V,W
regenerative circuits) at CN6 and CN7 connectors by using an
insulated oscilloscope.
When F7 is removed, alarm No. 3 occurs.
Short check terminals "ARS" and OV using a clip or the like.
After observation, detach the clip without fail.
19
-
Procedure
Description
5
Normal waveform
Faulty waveform
about
+1.0
-1.5V
0V
about
+1.0
— 1.5V
0V
about
-1.0~
-1.5V
about
-0.0—
-0.8V
l
166Msec
166*isec
Perform the following repair, if a PCB was found to have been
faulty.
(1) Fuses FA, FB...FG of the driver circuit are mounted in and
after PCB version No. 17H.
Check if these fuses are normal by using a circuit tester. If
a fuse is blown out, replace it, and check steps (1),(2) again
to make sure that the trouble has been recovered.
(2) Replace PCB if a PCB does not correspond to (1) or no fuse is
blown out in (1).
Connect the motor power cable, replace fuse F7, and restart the
operation.
6
4) Alarm No.
0
AC input fuses (FI, F2, F3) are blown out.
Check procedure
Item
Causes
1
High impedance on AC
power supply side.
(Note 1)
(Example)
Two transformers are
connected in series or
when a variable auto¬
transformer is
connected
° Alarm No. 4 lights
Transistor module is
See alarm No. 3.
.
2
defective
.
0
only when the motor
speed is reduced
from high speed.
Alarm No. 4 may also
light, irrespective
of normal condition
of FKF3.
20
-
Remedy
° Replace the
power
supply having low
power impedance.
0
Looseness of input
cable connector.
Example :
Open phase due to
loosened screws.
See alarm No. 3.
Replace transistor
module and fuse.
Item
After disconnecting
cables of diode modules
DMlÿ and thyristor
modules SM1ÿ3, check
A-K by using a circuit
Diode module or
thyristor module is
defective
3
Remedy
Check procedure
Causes
.
Replace defective
parts and fuses.
tester.
(Defective parts are
generally shorted.)
4
5
Surge absorbers or
capacitors are
defective.
Check surge absorbers
Z1V3 and capacitors
Input fuses not blown
Check if it is not
applicable to item 1.
out
Replace defective
parts and fuses.
C4ÿ6.
.
Replace the PCB if not
applicable to item 1.
Note) Power impedance checking method.
>R
g AC spindle
servo unit
To AC power
supply
T
>G
AC voltmeter
AC spindle
motor
W<
G,
E
I Calculation formula
E0" E1
—
E0
where
2
Eÿ:
Eÿ:
x 100 (%) < 7 (%)
Voltage when the motor stops operating.
Voltage during acceleration of motor or voltage just before the
motor speed begins lowering with a load applied.
Input power specifications
Specifications
Name
Nominal rated voltage
AC200/230V
Allowable voltage
fluctuation width
-15%
Power frequency
50/60Hz
Power impedance
Voltage fluctuation due to load (120% load
at 30 minute rating): Less than 7%
+10%
21
5) Alarm No.
Item
Q[]
Fuses AF2 or AF3 on PCB are blown out.
Check procedure
Causes
1
PCB is defective
2
Power voltage is
Check AC input voltage.
See 5 in para 3.2.
Remedy
Replace PCB.
abnormal.
Note) This alarm does not occur in MODEL 1/2/small MODEL 3.
6) Alarm No.
[6]
Overspeed (analog detection)
Item
Causes
1
PCB setting failure or
adjusting failure
Wrong specification of
2
ROM (memory IC)
3
Check procedure
Check PCB for normal
setting and adjustment
(S2, S3, S5)
Change S5 setting.
Check specification
referring to Table 1.1.
Replace ROM.
.
PCB is defective.
7) Alarm No.
[7]
Remedy
Replace PCB.
Overspeed (digital detection)
Same as in alarm No. 6
8) Alarm No.
[8]
+24V overvoltage
Causes
Item
Check procedure
1
AC power voltage
exceeds +10% of the
rated value.
Check power voltage.
2
Setting failure of
voltage selection
toggle switch.
Check power voltage.
9) Alarm No.
[9]
Setting from 200V to
230V.
Radiator is overheated.
Causes
Item
Remedy
Check procedure
Remedy
1
Cooling fan is
defective.
Check if fan is
stopping.
Replace fan.
2
Overload operation.
Check load by using a
load meter.
Re-examine the cutting
condition.
3
Dusty and dirty.
Clean using compressed
air or vacuum cleaner.
[0| +15V voltage drop.
This alarm indicates abnormally low AC power voltage (-15% or less).
10) Alarm No.
22
-
11) Alarm No.
Item
0
Overvoltage of DC link circuit.
(Regenerative circuit is faulty
Causes
... Regeneration failure)
Remedy
Check procedure
Check fuses F5, F6 by
using a circuit tester.
If these fuses are
blown out, check
transistor module by
the same procedure as
in alarm No. 3.
Replace fuses.
1
Fuses F5 and F6 are
blown out.
2
High power impedance.
Examine AC power
specification.
3
PCB is defective.
Replace PCB.
Note) Item 1 does not apply to MODEL
12) Alarm No.
Item
0
1/2/small
MODEL 3.
Overcurrent flows to DC link circuit.
Causes
1
Output terminals or
internal circuit of
motor is shorted.
Check connections.
2
Transistor module is
defective
Check it by the same
procedure as in alarm
No. 3.
.
3
Remedy
Check procedure
Replace defective
parts.
Replace PCB.
PCB is defective.
Note) Method of replacing transistor modules in MODEL
1/2/small
MODEL 3.
Procedure
Description
1
Turn off AC power supply (turn off the magnetics cabinet breaker)
and disconnect the motor power cable.
2
Disconnect the cables (including flat cables) which connect the
upper and lower PCB.
3
Remove one upper screw and one lower screw, and open the cabinet
to the front left together with the mounting plate without
detaching the upper PCB.
23
-
Procedure
4
Description
Check resistance values of the following terminals of transistor
modules on the lower PCS by using a circuit tester.
(1) P (collector) - Uo,Vo,Wo (emitter)
(2) Uo,Vo,Wo (collector) - N (emitter)
(3) P (collector) - B1,B2,B3 (base)
(4) Uo,Vo,Wo (collector) - B2,B4,B6 (base)
(5) B1,B3,B5 (base) - Uo,Vo,Wo (emitter)
(6) B2,B4,B6 (base) - N (emitter)
(See appendix 6 PCB installation drawing.)
OP
B1
B2
u0
B1
IS
B3
B5
O u0
O v0
B4
B6
o-K So-K Ao-|< Z\
16
N
P
ffl fiSj]s
B2
O-K A
Ow„
cH< AcH< A
ON
Criteria (circuit tester range x 10ft)
Terminal
to be
observed
C-E
Circuit tester
terminal
Connect C to
Faulty
Several 100ft
Short, infinite
Connect C to
terminal
Infinite
Short, several
100ft
Connect C to
Several 100ft
Short, infinite
Connect C to
terminal
Infinite
Short, several
100ft
Connect B to
4- terminal
Several 100ft
Short, infinite
Connect B to
Several 100ft
Short, several
+
terminal
C-B
Normal
+ terminal
B-E
-
terminal
If a transistor is broken, the collector-emitter and collectorbase are usually shorted, respectively.
24
Procedure
Description
3
Replace faulty parts.
Remove the lower PCB first (See Table 6.2 (a)-(l)).
Divide the connection part of the short bar holder into 2 parts by
using cutting pliers or the like, remove the right side part, and
replace the transistor module. Apply a coat of silicon grease
without fail when replacing these parts.
4
After replacement, mount the short bar holder and mount the lower
PCB onto the short bar holder (See Table 6.2 (b)-(l)).
Recheck the circuit according to procedure 2.
5
Check the PCB transistor driver circuit.
(1) Turn on the AC input power supply. Don't apply any rotation
commands (SFR,SRV).
(2) Measure the base-emitter voltage of six transistors (U,V,W
phases) by using a circuit tester.
Particularly be careful since a high voltage is applied to the
vicinity of the driver circuit so as not to receive any
electric shock.
[Criteria]
A faulty circuit can be checked at glance, since it is
different from other normal circuit.
Base-emitter voltage (based on emitter)
Normal
About -0.8 V
Faulty
About
0.0 V
%
-1.3 V
-0.8 V
(Reference)
The following figure shows normal and abnormal waveforms as a
reference when they cannot be checked easily by using a circuit
tester.
Particularly be careful since a high voltage (about 300V) is
applied to the vicinity of the driver circuit.
Apply normal rotation or reverse rotation command.
(The velocity command specifies 0 rpm)
Observe the base-emitter waveform of each transistor (U,V,W
phases) at each terminal of the lower PCB by using an insulated
oscilloscope.
Short the check terminal ARS to 0 V by using a clip or the like.
Disconnect the clip without fail after observation.
.
25
-
Procedure
Description
Normal waveform
Faulty waveform
about
+1.0
-1.5V
about
+1.0
-1.5V
0V
0V
about
-1.0~
-1.5V
about
0.0~
-0.8V
166mscc
166jisec
Repair the circuit if the PCB was confirmed to be faulty. Fuses
FA, FB...FG of the driver circuit are mounted on PCB. Check these
fuses for normal condition by using a circuit tester. Replace
faulty fuses, if any, and check (1),(2) again to make sure that
the trouble has been recovered.
Connect the motor power cable and restart the operation.
6
13) Alarm No. Q
Replace PCB.
14) Alarm No.
Item
1
0
CPU alarm.
ROM is defective.
ROM is not mounted at
all or not properly
mounted.
2
Check procedure
Causes
Check if ROM is
unplugged from the
socket or if its leads
are broken.
O
Option alarm.
Causes
Item
Mount ROM properly.
Replace ROM having
correct specification.
(see Table 1.1)
ROM is defective.
15) Alarm No.
Remedy
Check procedure
Remedy
1
Spindle selector
circuit or other option
PCB are faulty.
Replace PCB.
2
Option PCB connection
is in error.
Check and correct the
r
connection.
-
26
-
3.4 Motor does not Rotate, or Motor does not Rotate at the Specified Revolutions
Item
1
Causes
Fault analysis
Check procedure
Alarm lamp lights on
spindle servo unit when
rotation command is
Remedy
Proceed to 3.3.
given.
Alarm lamp does
light.
2
Command signal
connection failure
3
PCB is defective.
not
Proceed to item 2 or
3.
Check signal cable
Connection.
Replace PCB.
3.5 Vibrations or Noises are Noticeable during Rotation
Item
Causes
1
Motor is defective.
2
PCB is defective.
Check procedure
Remedy
Replace motor.
Run the motor idly.
Replace PCB.
When the connector CN2
from AC spindle servo
unit while rotating the
motor, overheat alarm
occurs, and the motor
runs idly. If vibra¬
tions and noises are
reduced during idle run
as compared with normal
rotation time, the
control circuit is
defective
.
3.6 Abnormal Noise is Produced from Motor during Deceleration
During deceleration of the motor, energy is regenerated to the power supply
through the regenerative control circuit (this energy is consumed by resistors
in MODEL 1/2/small MODEL 3)
If the regenerative energy is excessive, the regeneration limiter circuit
operates to change the motor current waveform, causing an abnormal noise to be
produced from the motor.
If such a case, turn RV6 (this is normally set to division 3) counterclockwise
untill no abnormal noise is produced. When RV6 is turned counterclockwise, the
deceleration time increases.
!*
27
-
3.7 Speed Overshooting or Hunting Occurs
Item
.1
Causes
PCB setting or
adjustment failure.
Check procedure
Increase gain by
turning RV12
(standard division 5)
Remedy
Readjust RV12.
clockwise.
2
Spindle hunting occurs.
Decrease gain by
turning RV12
counterclockwise
Readjust RV12.
.
3.8 Cutting Power is Low
Item
Causes
Check procedure
1
ROM specification is
wrong.
Check it referring to
Table 1.1.
2
Torque limitation
command is applied.
Check signal.
3
Loosened belt.
Check belt for proper
tension.
Remedy
Replace ROM.
3.9 Orientation is not Correct
Item
Causes
Check procedure
Remedy
1
Setting or adjusting
failure of orientation
Check if circuit is set
and adjusted as
specified in data
sheet
Refer to setting and
adjustment of spindle
orientation control
circuit in chapter 7.
control circuit.
.
Orientation control
circuit PCB is
defective
Replace PCB.
3
Spindle control PCB is
maladjusted.
Adjust PCB.
4
Position detection
(position coder or
magnetic sensor) is
2
.
defective
.
Check the output signal
waveform of the
position detector.
(For the magnetic
sensor, refer to
appendix 10.)
28
-
Replace the position
coder or magnetic
sensor
.
3.10 Acceleration/Deceleration Time is Long
Item
Causes
Check procedure
Remedy
Check signal.
1
Torque limitation
command is applied.
2
ROM specification is
wrong.
3
Defection of the
regenerative circuit.
See alarm No. 2
item 3, 4.
4
PCB is maladjusted.
If RV6 is set lower
than necessary, the
deceleration time
increases (see para.
Replace ROM.
3.6).
29
-
Readjust RV6.
4.
INSTALLATION
4.1 Installation Procedure
Observe the checking procedure shown in the following table at the installation
time.
Item
1
2
Remarks
Description
Check if specification of motor,
servo unit, options, etc. are
Check if motor corresponds to
units, PCB, and ROM correctly
correct
according to table 1.1.
.
Check appearance for damage
Check resistors, and PCB parts
mounted on the upper part for
damage
.
3
Check the working AC power supply
for voltage, voltage fluctuation,
power capacity (KVA) and
frequency.
See table 4.2.1.
4
Connect the earth wire, power
See 4.2, 4.3, 4.4 and appendix 1.
cable, drive power cable, and
signal cable (See note 1).
5
Check setting and adjustment
results
6
Turn on AC power supply, and make
sure that green lamp PIL light on
See 5.1.
.
PCB.
7
Give rotation command to check the
normal rotation and reverse
rotation movement.
8
Check the operation over the
entire velocity range.
9
Adjust spindle orientation
circuit
See section 7.
.
Note) Check the connection with discharge resistor for MODEL
1/2/small
MODEL 3.
4.2 Power Connection
4.2.1 Power voltage and capacity check
Measure the AC power voltage before connecting the power supply, and take the
following measure according to power voltage.
-
30
-
Table 4.2.1 (a) Measure to AC power voltage
AC power voltage
170 V
210 V
*
Nominal
Measures
voltage
220 V
200 V
Set toggle switch SW to 200 V
253 V
230 V
Set toggle switch SW to 230 V
380 V
550 V
Set input voltage to 230 V by using
insulation transformer
Higher than
254 V
The input power specification of the AC spindle servo unit is as specified in
Table 4.2.1 (a).
Use a power source having the power capacity having a sufficient allowance so
that no trouble due to voltage drop occurs with the maximum load.
Table 4.2.1 (b) Input power specifications of AC spindle servo unit
Nominal rated voltage
AC 200
V/230
Allowable voltage fluctuation
-15%
+10%
Frequency
50
Power
capacity
Motor model
*
V (SW selection), 3 phases
Hz/60Hz +1
Hz (Note 1)
1
2
3
6
8
12
15
18
22
30
40
4
7
9
12
17
22
26
32
37
54
63
Capacity (KVA)
with 30-minute
rating
Note 1) Model 40 (A06B-6052-H140) requires the 50/60 Hz
this selection is not required for other models.
selection.
However,
4.2.2 Protective earth connection
Connect the protective earth to connection terminal G before connecting the
power supply.
Use the protective earth having sufficient capacity as compared with the feeder
circuit breaker capacity.
4.2.3 Power connection
Connect the power cable after protective earth connection.
The power phase rotation is not specified for AC spindle servo unit.
4.3 AC Spindle Motor Connection
Connect the AC spindle motor according to the connection diagram in appendix 1.
If the drive power cable connection sequence is in error, vibrations are
produced or alarm No. 2 occurs to stop the motor. Connect protective earth "G"
without fail.
4.4 Single Cable Connection
Connect the signal cable according to the connection diagram in appendix 1.
31
5.
SETTING AND ADJUSTMENTS
5.1 Setting of Unit and PCB
For the parts on the unit and PCBs, refer to mounting layout of parts (APPENDIX
5 and 6). Confirm the following setting before turning on the power switch.
Table 5.1 (a) Setting to be confirmed before turning on the power switch
Check items
No.
Remarks
1
Setting of voltage selection
See para. 4.2
2
Setting (short bars) check
See table 5 1 (b)
.
Table 5.1(b) Setting
Setting
Setting at
terminal
number
SI
Contents
Machine ready
signal (MRDY)
shipment
from FANUC
Setting
Used
OFF
0]
o
Not used
ON
OFF
ON
01
ON
S2
Analog over¬
ride
Used
OFF
Same as the
ON
Used
ON
Not used
OFF
above
01
ON
0) ON
0J
o
S4
Velocity
command signal
OFF
o J
Not used
S3
0
Use of
external
analog voltage
ON
OFF
OFF
0 ]°N
o
command
Use of R01
ON
R12 commands
32
-
ON
o
01
ON
I
Setting
terminal
number
S5
MODEL
1
2
Contents
Setting of
velocity feed¬
back amount to
rated command
Setting at
shipment
from FANUC
Setting
4000, 4500,
8000 rpm
A,B: OFF
°
A
6000 rpm
B: ON
o
A
0
Eh
Set to the
rating of
the motor
employed
B
Small
MODEL
3
A: ON
20000 rpm
o B
B: Shorted
4500 rpm
H
B
°
MODEL
3
s
6000 rpm
A: Shorted
8000 rpm
A and
B: Opened
40
A
o B
0*
lB
A
°
Depends on motor and PPW version
numbers. See table 5.1 (c)
S6
Velocity
control
phase com¬
S6
S7
pensation
S7
S8
Delay time
required until
motor is de¬
energized
0 sec/option
0.2 sec/
standard
ON
0] ON
Machine ready
signal func¬
MCC is turned
OFF
0fÿON
S9
OFF
0]
o
off
ON
ON
(Note 2)
OFF
tion
S10
Overcurrent
detection
MCC is not
turned off
ON
Labeled
OFF
start/
ON
0.6
8 sec
A
3.5
40 sec
B
stop time
constant
switching
(Adjust by
RV20)
I
o
Not labeled
Soft
0J
O
level
SIX
0] ON
o
Eli
33
-
ON
°
B
0
B
Eh
°
-
ON
A
Determined
as speci¬
fied on
the unit
label
(Note 3)
A
Setting
Setting at
terminal
number
Contents
Maximum
Speed-zero
detecting
S15
shipment
from FANUC
Setting
ON
revolution
10000 % 20000
rpm
Maximum
revolution
lower than
10000 rpm
o
0
ON
0
OFF
Set to the
rating of
the motor
employed.
(Note 4)
OFF
o
Note 1) Be careful since S5 setting differs between MODEL 1, 2, small MODEL 3
and MODEL 3-40.
Note 2) Insert a short bar without fail even when setting is turned off.
Note 3) Turn on S10 only when the label at the upper part of the PCB mounting
plate represents that S10 is turned on.
Note 4) S15 is used for AC spindle servo unit MODEL 1/2/small MODEL 3 only.
Note 5) Presence or absence of setting terminal S8 to S15.
a
b
c
S8
Presence
Presence
Absence
S9
Presence
Presence
Absence
S10
Absence
Presence*
Presence
Sll
Absence
Absence
Presence
S 15
Presence
Absence
Absence
a: MODEL 1, 2, small 3S
b: MODEL 3 to 22
c: MODEL 30, 40
*
S10 was added after PCB edition 17H.
-
34
-
;
RV19 of the spindle control circuit PCB have been
Variable resistors RV1
adjusted at factory before shipment, and their adjustments are no longer
necessary, in principle.
However, the set values of variable resistors shown in Table 5.1 (d) are
Readjust variable resistors shown in Table 5.1 (e)
changeable as required.
after turning on the power supply, if fine adjustment is required for offset,
rotating speed, etc.
1 OK
O
'
\
S2
Velocity command | DA 2
VCMD
—
(MAX 10V)
I
s3
10K
-WV
Q Q
-
8.2 K
1.8K
10K
1 00 K
r
0V
I
>
Analog override | OV
OVR]
I
rVRi
I
a
OVR2
OVR2
i
Use of override
Override range
Override range
Max 100%
Max 120%
Setting
Unuse of
override
S2
OFF
OFF
ON
S3
ON
OFF
OFF
Fig. 5.1 (a)
Analog override circuit
Table 5.1 (c) Setting of S6 and S7
i) PCB A20B-0009-0534
-
539
Applicable
motor
Type
Overall version
number of PCB
Setting
MODEL 15
J04
After 001F
After 14F
OFF
ON
MODEL 18
J05
After 001C
After 14F
OFF
ON
MODEL 22
J06
After 001A
After 14F
OFF
ON
ii) PCB A20B-1000-0690
Applicable
2
ROM
Version number
motor
-
0693
Setting
ROM
Type
Version number
S6
S7
MODEL 3
J10
After 001E
OFF
ON
MODEL 6
Jll
After 001E
OFF
ON
MODEL 8
J02
After 001G
OFF
ON
MODEL 12
J03
After 001G
OFF
ON
35
iii) PCB A2 OB- 1000-0 7 00
-
Applicable
0701
ROM
Type
motor
S6
Version number
Setting
S7
MODEL 30
J06
After 001A
OFF
ON
MODEL 40
J07
After 001A
OFF
ON
iv) PCB A16B-1100
-
0080
Applicable
Setting
ROM
S6
S7
lX£e
Version number
MODEL 1
J21
After 001A
OFF
ON
MODEL 2
J22
After 001A
OFF
ON
MODEL 3
J23
After 001A
OFF
ON
motor
1) Variable resistors whose set values are changeable.
Table 5.1 (d)
Variable
resistor
number
RV3
Use
Set speed arrival
level
Standard adjustment at
shipment from FANUC
Setting
change method
Sends speed arrival signal
when the motor speed reaches
115% of the command
85
speed
See appendix 8.
3% of the maximum speed is
detected
See appendix 8.
.
RV4
Speed detection
level
RV5
Torque limit value
See appendix 8.
RV20
Soft start/stop
time constant
adjust
See appendix 8.
(Note 1)
.
-
36
2) Variable resistors for fine adjustment of offset and rated speed.
Table 5.1 (e)
Variable
Adjusting method
Use
resistor
number
RV1
Adjusts the velocity command voltage level.
See appendix 8.
RV2
Adjusts the velocity command voltage offset.
See appendix 8.
RV9
Finely adjusts the rated speed in normal rotation
See appendix 8.
(Note 2)
(SFR)
.
Rll
Finely adjusts the rated speed in reverse
rotation (SRV).
See appendix 8.
(Note 2)
R13
Adjusts the offset when zero speed is commanded.
See appendix 8.
Note 1) Soft start/stop function is employed only for MODEL 30 and 40. RV20 is
not provided to other models.
Note 2) RV9A, B/RV11A, B are provided for AC spindle servo unit MODEL 1/2/small
MODEL 3. Their adjusting methods are the same as specified above.
Note 3) Don't change the setting of variable resistors other than specified in
Table 5.1 (d) and Table 5.1 (e) , since these variable resistors have
been adjusted at factory before shipment.
For adjustments of variable resistors, see APPENDIX 8.
5.2 Setting and Adjustment of Spindle Orientation Control Circuit Option
Refer to spindle orientation control circuit, in chapter 7.
-
37
6.
EXCHANGE METHODS OF FUSES AND PCB
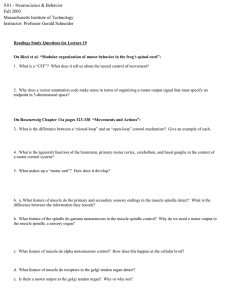
6.1 Exchange of Fuses
after opening the unit
Replace fuses FI - F7 in AC SPINDLE SERVO UNIT series
cover as shown in 6.1.
Open the cover toward the front right
side together with the sheet metal
after unscrewing upper and lower
screws (one each).
MODEL 8/12
MODEL 3/6
©_
FAN MOTOR
i
Mounting
u>
layout
of parts
oo
FAN MOTOR
ED
0
I
PCB
ED
ED
ED
ED
ED
HEAT SINK
HEAt SINK
CN9
Spindle orientation circuit
(magnetic sensor system)
ED
r
r
i
i
iCNA.
V
u
CN1 CN3 CN2 TB
QD
\
1 23
“Sllfe*
1D-‘D 11
1£ £
~
T T
-L 2 i.
£ £
T
XS
o
(i) Spindle servo unit for AC
spindle motor model 1, 2, 3
(A06B-6044-H103, 203
A06B-6044-H106, 206)
o
(ii)
Spindle servo unit for AC spindle
motor model 3 and 6,
•Small type spindle servo unit for
AC spindle motor models 8 and 12.
Fig. 6.1 How to open the AC SPINDLE SERVO UNIT series cover (1/2)
(A06B-6044-H108, 208
A06B-6044-H112, 212)
Open the cover toward the
front right side togetiier with
the sheet metal after unscrewing
Open the cover toward the front
right side together with the sheet
metal after unscrewing upper and
lower screws (one each).
upper and lower screws (one each).
ST
TP
TT
O
O
4
0
r
[)
r
PCB
PCB
PCB
CN9
Spindle orientation
circuit (position
II
coder system)
CNC
QNA CNB
CN1CN3 CN2 TB
o
a
I
f
(one each)
o
CN1 CN3 CN2 TB
1 23
CNI
e=> <r=>
ffl
LO
Open the cover
toward the front
right side after
unscrewing upper
and lower screws
so
A©
Remove the sheet
metal by removing
four screws.
I
©
1®
ll/s
r
X
©
J
D
220V
To magnetic
cabinet or NC
F F IF
l 2 3
230v
T1
alBIOI T2 22W
Mil
23
„
TB
laaai
mm HI
H
_
[B
Remove the sheet
metal by removing
four screws
"55
(IJW \/n.w
r'P
Mounting layout
of parts
5MTJ
i
Arrange to
the same size
Prom 3-phasc
AC power supply
12 and 15
(A06B-6044-H009, H010,
HOI 1 , H023)
—
Hffl
Pan motor
Power cable
18 and 22
From 3-phasc
AC power supply
SW
Power Pan
cable motor
To AC motor
AC motor
(iv) Spindle servo unit for
AC spindle motor models
s
/
o
(iii) Spindle servo unit for
AC spindle motor model 8,
CN2
To AC motor
Nr
200V
0/ 10 r
/AY |i-M
CN3
ft —-) 0 —i 0 '
(v) Spindle servo unit for AC spindle
motor
Fig. 6.1 How to open the AC SPINDLE SERVO UNIT series cover (2/2)
model 30 and 40.
(for model 40)
6.2 Exchange of PCB
6.2.1 MODEL 1/2/small MODEL 3
Table 6.2.1 (a) How to remove PCB
Procedure
Step
1
Disconnect cables from PCB and also disconnect cables which fix the
upper and lower PCB after turning off the power supply.
Record the correspondence between cables and connector numbers.
Removal of upper PCB
2-1
Remove two fixing screws of PCB.
•[]
[]»
Screw 2-M3
2-2
Open the claws of the upper
supports of PCB outward and pull
PCB this side while lifting it.
4ÿ
O
O
Pull this side
Removal of lower PCB
3-1
Remove one upper screw and one
lower screw, and open the PCB
together with the mounting
plate
.
0
I!
Screw 2-M4
./(/(/(/C/C/
-
40
-
I
Removal of lower PCB
3-2
Remove 28 screws on PCB and
remove PCB by pulling this side.
Screw M-5
Screw 27-M4
®®®
© © ®® ©
® ® 0©
® ®0 ®
0®
®B ® © ©
Table 6.2.1 (b) How to mount PCB
Procedure
Step
Mounting of upper PCB
1-1
Set the upper holes of PCB to
the upper supports of the
mounting plate, and push PCB
until a click is heard.
°u
o
1-2
Fix the lower part of PCB by
2 screws.
o
|]»
Screw 2-M3
©
-
41
Mounting of lower PCB
2-1
Insert PCB while setting PCB
holes to the conduits mounted
from the short bar holder, and
fix it by 28 screws.
®®
©
Screw
Screw M5
®
— M4
®® ®
®© ©©©®
®®®
®®
a®®
© ® © ® ®
2-2
Fix PCB together with its
mounting plate to the unit by
fixing the upper and lower
screws
©
n
.
Screw 2-M4
Ig'
y<Jc/c/l/<y
3
Connect cables to the connectors.
4
Check the ROM specification, PCB setting, and start operation.
c
6.2.2 MODEL 3 ~ 40
Table 6.2.2 (a) How to remove PCB
Procedure
Step
1
Disconnect cables from PCB after turning off power supply.
correspondence between cables and connector No.
2
Remove six screws fixing PCB.
Screw
6 -M3
D
0
0.
- 42 -
D
D
G
Record the
Procedure
Step
3
Gradually lift the upper right
and lower right part of PCB
forward at a time, and remove
PCB by disconnecting connectors
CN4 - 7 (pins are inserted from
the rear side)
o
o
D
D
.
0
o
o
Lift forward
Table 6.2.2 (b) How to mount PCB
Procedure
Step
1
After setting the guide holes
7 to
of PCB connectors CN4
the
unit side
the guide pins on
until
check
7
and insert CN4 (see
right
figure)
groove
appears on the PCB connector
surface
-
PCD
'
.
___
Connectors
CN4
~7
Guide hole
Guide line
I,
|
Insertion level
check groove
step 2 in Table
2
Fix PCB on the unit by using four screws.
6.2.2 (a).
3
Connect cables to the connectors.
4
Start operating the unit after confirming the ROM specification and PCB
setting.
Se
6.3 Exchange of Spindle Orientation Control Circuit PCB
6.3.1 MODEL 1/2/small MODEL 3
Table 6.3.1 How to remove PCB
Procedure
Step
1
Disconnect the flat cable which connects PCBs.
2
Remove four screws which fix
the spindle orientation control
circuit PCB plate.
<=>
-
43
-
0
<'=l Screw (M3)
6.3.2 MODEL 3 ~ 40
Table 6.3.2 How to remove PCB
Step
Procedure
1
Remove the entire PCB from the spindle control unit according to Table
6.2.2 (a) disconnect cables connection PCB.
2
Remove 4 screws which fix the
stays of spindle orientation
control circuit PCB.
Screw
M3
Orientation PCB
Mount PCB by reversing the procedure specified in Table 6.3.2.
-
44
-
I
7. SPINDLE ORIENTATION CONTROL CIRCUIT
and
installation,
for maintenance,
describes instructions
This chapter
adjustment when a pure electric orientation (constant position stop) function is
attached to the spindle of an NC machine tool.
7.1 Configuration
Spindle orientation command
Spindle
servo unit
----
i
—
Magnetic
cabinet
i
CNl
i
sequence
i
Spindle
C
motor
circuit
:
L
Tp-J
1
n
r
NC
Gear or belt
Spindle
J
Cutting tool
CNA
_J
CND
Orientation circuit A, E
(option)
non
Positi
cont_rol
loop
;
Direct coupling gear or
timing belt
Position coder
Fig. 7.1 (a) Configuration of spindle orientation using position coder
(Internal stop position setting type)
I
!
Spindle orientation control circuit B, F
Spindle
servo unit
Magnetic cabinet
sequence circuit
---NC
/
i
1
I__
I
I
L
(option)
Gear or belt
CNl
s
Spindle
CNB CNACNC
a
_l
motor
c=i
Spindle
a
I
L_*
\
Position
contr oiloop
!
Cutting tool
Direct coupling gear or
timing belt
Position coder
External stop position command
signal
12-bit binary
(4096 360°)
Fig. 7.1 (b) Configuration of spindle orientation using position coder
(External stop position setting type)
Note 1) If a position coder is mounted on a lathe, etc., it is applicable to
this system.
Note 2) Asterisked cable route is employed when the position coder of the lathe
or sync, feed position coder in machining center is combined.
-
45
----1
______
Spindle orientation command
| N119
-j
I
I
NC
I
I
I
L
Spindle
servo unit
Gear or belt
I
Magnetic
cabinet
sequence
circuit
CN1
:
Spindle
1
motor
CNA
§
i
Spindle
j
a
Position
control
loop
Spindle orientation control
circuit C, D, G (option)
Magnetic
sensor
-
JsfH
J \
w-'i
Cutting tool
Magnetic clcmcn
(direct-coupled)
Magnetic sensor
Amplifier
Fig. 7.1 (c)
Configuration of spindle orientation using magnetic sensor
7.2 Adjustment of Position Coder System Spindle Orientation Control Circuit
7.2.1 Setting and adjustment of spindle orientation control circuit in 2-step spindle speed change
The MODEL 3ÿ40 require orientation A, B (A06B-6041-J110, Jill), while MODEL
1/2/small MODEL 3 require orientation AS or BS (A06B-6052-J110 , Jill). Setting
and adjustment for PCB A20B-0008-0240, 0241 are described in the followings.
1) Display contents
The following display is done using LED.
Lighting
color
LED No.
Symbol
LED 1
ORIENTATION
Green
Lights when orientation command
(0RCM1, 2 ON) is input.
LED 2
LOW
Green
Lights when cluth switching signal *CTH
contact is closed. It means that cluth LOW
Description
is selected.
LED 3
IN-POSITION
OUT
Green
Light when orientation end signal 0RAR1-2
is sent.
LED 4
IN-POSITION
ADJUST
Green
Lights when spindle enters within 1 pulse
width of orientation command position.
Adjust OFFSET adjusting RV3/RV5 so that
this LED4 lights at gear HIGH/LOW, and the
stop positions at gear HIGH and LOW
coincide with each other.
-
46
2) Setting
a) Setting position coder power supply
If the position coder power supply +5 V is supplied from the spindle
amplifier, short the circuit between +5 V - 5 H and 0 G - 0 V. Open the
0 V when +5 V is supplied from NC
5 H and 0 G
circuit between +5 V
machine tool.
b) Setting of SW4 and SW5
-
Position coder
Type
SW4
SW5
Balanced type
Type A
Right
Right
Unbalanced type
Type B
Left
Left
c) Setting of SH01, SH02, SH03
Set SH01, SH02, and SH03 according to the following table.
-
47
.
\
-. Table 7.2.1
’•V
Setting of SH01, SH02 and SH03
-
x
SH01
1
Setting contents
No
2
3
4
5
SH02
6
7
16' 15 14 13 12 11 10
1
2
Setting of rotating direction
in the first orientation after
turning on the power switch.
Setting of rotating direction
in the second and sub¬
sequent orientation.
O indicates short-circuit, while
CCW
O
x
cw
x
o
e
l
3
4
5
SH03
6
7
8
1
2
9 16 15 14 13 12 11 10
9
2
3
2
1
I I
indicates opening .
Remarks
I
(Standard)
CCW direction
only
CW direction
only
x
O
x
x
O
x
( Standard)
Same as rotat¬
ing direction
3
Setting to clamp the orien¬
tation speed determined by
position gain to 1, 2/3 and
1/3.
I
03
4
Setting by spindle rotation
and rotating direction of
position coder.
I
( Standard)
1t
X
X
2/3
O
x
1/3
x
O
Same direction
Opposite
direction
+2 pulse
5
Setting of the in-position
width when orientation end
signals (ORAR1, 2) are
output.
+4
O
x
x
o
Depens upon machine tools. Hunting occurs,
if this setting is inverted.
O O O O O O
O
+8
7
Setting by hysteresis of
position coder
Setting according to the
types of spindle servo unit.
(Note)
*
*
O
O
(+16 pulse corresponds to +4.. 3°)
o o
o o o
+ 32
O
O
O
No compensation
x
x
+1 pulse
O
x
-1 pulse
X
O
(Standard)
DC
O
X
When DC spindle servo unit is used.
AC
x
O
When AC spindle servo unit is used.
Sending condition (C) of orientation end signal are as below:
*
o o o
+ 16
+64
6
O
The angle position is located with the in-position setting pulse range.
Speed zero signal is turned on.
ORCM is turned on.
d) Setting of position switches (SW1, 2, 3)
Setting switch
SW1
Pulse number per 1 division
4096/16
Angle change amount
per 1 division
= 256 pulses-
256/16 = 16 pulses
SW2
16/16
SW3
every 22.5°
every 1.4°
every 0.088°
= 1 pulse
SW1 to SW3 are digital switch with 16 scale.
The spindle can be stopped at an optional point during one rotation in the
unit of 1/4096 x 360° = 0.088° by setting these switches in the order of
SW1, SW2, SW3.
3) Adjustments
Name of
No.
Item
variable
resister
1
2
Speed feedback
voltage OFFSET
RV1
Gear HIGH
RV2
position gain
Standard
adj ustment
Measuring point
5
divisions
TSA2
CH14 (TSA2)
Adjust RV1 until
TSA2 voltage
becomes 0 +1 mV.
Set the gain to
the maximum within
a range where the
spindle does not
overshoot.
3-4
Spindle motion
divisions
or CHI 4
Description
3
Gear HIGH
offset
RV3
About 5
divisions
LED4 (ADJUST)
Adjust RV3 until
LED4 lights or
flickers.
4
Gear LOW
position gain
RV4
3-6
divisions
Spindle motion
or CHI 4
Set the gain to
the maximum within
a range where the
spindle does not
overshoot.
Gear LOW
RV5
About 5
divisions
LED4 (ADJUST)
Adjust RV5 until
LED4 lights or
5
offset
flickers
6
7
Speed loop
gain (in case
of DC spindle
motor)
RV6DC
Speed loop
gain (in case
of AC spindle
motor)
RV6AC
0 division
CH14
.
Make sure that
hunting.
the rigidity
increases during
stop by turning
these RV clock¬
wise.
motor not
CH14
7
divisions
-
49
-
Applies to overall version number 05C and higher
1
n
il©©
3103 RW
LA
r
1
mm GAIN
dc/ac
c
["
.
f
r
OUT
r
T
7
9
8
ADJUST
I
i
1 r
6.
IN- POSITION
.'O *0 30 <o
T
3
TSA I/TSA Z/VCMDZ/VCMD3 ElV CWUÿS DT/* FWiy* INCL/7.S
2
i
5
OFUEN—
TAT ION LOW
CN9
LED1-4
4
5 UO 2
Vffl. SI
U IKi
HI
£rM2
El
ov
1
28
SW2
uH
SWl
22,"
Ll[®]3
s- s1010
WL.
(H rmlN
r
1
SHOI
ICFFSET
E —
r«B
RV1
+ 15V
sc
70
1
+ SC
PA
PD
PA
7
A20B-O00B-024tf/02
I
J
CNA
2
00
20
ESD465B
_
*
(P.C
(P.C
TYPE B)
2,H
J]
TYPE A)
CNC
4
7
L
"
PUI3E
6
|
CNB
B'73
i
1 )xÿ
SKIHIJ
j
«1
•20
(SHIELD)
OV,
ESD445B
//\
l
L
S\V4
s-
1010 1010 3)X2°"J
3
2
PP
ffiV +15V-1SV
>0 ,20 30 <0 OO
5
SW5
SU3
O
*ro
* »»0120
0O *0 ‘0O
ov
-
-
270 E
GAIN
1
J
iliU
+24V
TSA2
O
-1
»0 D
OFFSET
Ln
J'
L
13O 14O 15O16O 17O IBO 19O20 O21O22 O
[”
I
AJ
ST1
1
J L
5
13
7
7
J L
8
J L
9
Overall version number
Fig. 7.2.1 (a) Mounting positions of check terminals, variable resistors, setting pins, and light-emitting diodes (LED)
(PCB A20B-0008-0240, 0241)
o
A20B-1000-0461/01
Him
ORIENTATION
LED1 LED2 LED3 LED 4
o
O o
O
CN9
QAJN&V SHD3
O', 0$cc
CTH
1
CMD TSA2 TSAI VCMD3
PUT
<T5
SY
ADJUST
IN-PO 8ITION
+
uavUoooooo
i
CTM
RVB
ooooooooo
INCL VOID2
+24V OV
PP
NP
ZS SQ2 SQ1 SIK0*EIK1
TSA2
OFFSET
o
)
INTO 5
D9
©
Q\1N
I
-|RV
JT
4
)
Ui
I
F4
©
O5nv
Mi
_U— RV
O’
O O
o so o o
o_ PA
o. o sc
*PD4SV%V*PA
ONC
DMJlIO’OttO’T
SVV1
TYPE
B
*SC
SW2
ION
oo
5H
CNA
CNB
CNC
Fig. 7.2.1 (b) Mounting place of check terminal, variable register, setting pin, LED
(PCB A20b-1000-0460, 0461)
SVV3
s
7.2.2 Setting and adjustment for spindle orientation control circuit 3 or 4 step spindle speed change
Orientation E, F (A06B-604 1-J130, J131) are required. Setting and adjustments
for the PCB A20B-1000-0460, 0461 are described in the followings.
1) Display contents
Symbol
LED No.
Description
LED1
ORIENTATION
Lights when orientation command is input.
LED 2
CTH
Lights when CTH signal (spindle speed change) is input.
LED3
CTM
Lights when CTM signal (spindle speed change) is input.
LED4
IN-POSITION
OUT
Lights when the machine is positioned within the setting
pulse width of the stop position after orientation
motion.
The stop position width is set by SH02 01-06 pins.
LED5
IN-POSITION
ADJUST
Lights when the machine is positioned within +2 pulses
of the specified stop position.
Adjust RV3 so that LED5 lights when the orientation has
been completed.
2) Setting
a) Setting position coder power supply
If the position coder power supply +5 V is supplied from the spindle
amplifier, short the circuit between +5 V
0 V. Open the
5 H and 0 G
circuit between +5 V
5 H and 0 G - 0 V when +5 V is supplied from NC
-
machine tool.
b) Setting of balanced type and unbalanced type
Position coder
Setting for setting terminal 1-9
Balanced type
Insert short-circuit bars on the type A side (9 positions)
Unbalanced type
Insert short-circuit bars on the type B side (9 positions)
c) Setting of SH01, SH02, SH03
Set SH01, SH02, and SH03 according to the following table.
-
52
Table 7.2.2 Setting of SH01, SH02 and SH03
O indicates short-circuit, while
x
SH01
1 2
Setting contents
No
3
4
5
SH02
6
I
I
7
2
Setting of rotating direction
in the second and sub¬
sequent orientation.
CCW
O
x
CW
CCW direction
only
CW direction
only
x
o
1 2
3
4
5
SH03
6
7
I I
16' 15 14 13 12 11 10
Setting of rotating direction
1 in the first orientation after
turning on the power switch.
8
indicates opening.
9 16 15 14 13 12 11 10
8
I
9
1 2
2
Remarks
3
(Standard)
x
O
x
x
O
x
(Standard)
Same as rotat¬
ing direction
3
Setting to clamp the orien¬
tation speed determined by
position gain to 1, 2/3 and
1/3.
I
Ln
U>
4
Setting by spindle rotation
and rotating direction of
position coder.
1
( Standard)
1
X
X
2/3
O
x
1/3
x
O
Same direction
Opposite
direction
0
x
x
O
+2 pulse
5
Setting of the in-position
width when orientation end
signals (ORAR1, 2) are
output.
+4
Depens upon machine tools. Hunting occurs,
if this setting is inverted.
O
0
o o o o o
+B
6
7
Setting according to the
types of spindle servo unit.
(Note)
O
(+16 pulse corresponds to +1.3°)
o o
O O O
+32
O
O
O
No compensation
x
X
+1 pulse
O
x
-1 pulse
x
O
-
(Standard)
DC
O
x
When DC spindle servo unit is used.
AC
x
O
When AC spindle servo unit is used.
Sending condition (C) of orientation end signal are as below:
* The angle position is located with the in-position setting pulse range.
*
O
+ 16
+64
Setting by hysteresis of
position coder
o o o o
Speed zero signal is turned on.
* ORCM is turned on.
d) Setting of position switches (SW1, 2, 3)
Angle change amount
per 1 division
Pulse number per 1 division
Setting switch
SW1
4096/16
SW2
256/16
SW3
16/16
= 256 pulses
every 22.5°
= 16 pulses
every 1.4°
= 1 pulse
every 0.088°
The spindle can be stopped at an optional point during one rotation in the
unit of 1/4096 x 360° = 0.088° by setting these switches in the order of
SW1, SW2, SW3.
3) Adjustment
Name of
variable
Item
No.
Standard
adjusting
Value
resister
1
RV1 DC
(for DC
motor)
0 division
Orientation
RV1A AC
7 divisions
high gain
(for AC
motor)
Orientation
high gain
2
fr
f,
3
i
•rVelocity
**
RV3
5
Low gear
position gain
. CTH-0N. CTM-ON
RV4
6
!
5 divisions
TSA2
5 divisions
VCMD3
r.
Fine position
adjustment
$
Rigidity increases when
turning clockwise during
•
&
&
\
2 divisions
Spindle
motion
(TSA2)
K
m
M.. Low gear
position garft
CTH-0N. CTMOFF
Z
M. Low g'eÿr
position gain
•
2 divisions
High gear
position gain
Set the gain to the
maximum within a range
where the spindle does
overshoot.
Spindle
motion
(TSA2)
Set the gain to the..
maximum within a ,range
where the spindle does
not- overshoot
.
2 divisions
Spindle
motion
(TSA2)
Set the gain to the
maximum within a range
where the spindle does
not overshoot.
RV7
2 division
Spindle
motion
(TSA2)
Set the gain to the—
maximum within a range
where the spindle does
not overshoot.
CTH-OFF. CTMOFF
__
_w
*
. .
Adjust so that LED5
(ADJST) lights at high
.ÿgear position gain.
RV6
CTH-OFF. CTMON
8
AHÿst until the voltage
becomes 0 +1 mV when the
spindle is stopping.
npt
§
7
'f.
•
i
r
RV2
Z*
Description
stop..
feedback
voltage
offset
i
Measuring
point
-
54
•
ii
No.
Item
ER voltage
offset
adjustment
9
Name of
Standard
variable
adjusting
resister
value
0 +1 mV
RV8
Measuring
point
Description
Adjusted before
delivery.
ER
Note) ,i v
1. Set SW1 - 3 as follows.
0 division
8 divisions, SW2, SW3
SW1
i2. Set, No. 1-4 setting pins (type A/B) to OFF.
3. Pferfprm the above adjustments after motor has been
rotating/yith the orientation command turned on.
...
...
h-
\
-T%
7.3 Adjustment of Magnetic Sensor Type Spindle Orientation Control Circuit
)
A-
7.3.1 Mounting method of magnetizing element and magnetic sensor
Determine the mounting directions of the magnetizing element and magnetic sensor
If they are not mounted correctly, the
according to the following . procedure
spindle may repeat normal rotation and reverse rotation without being stopped,
the hunting occurs, or the spindle stops at the position where the magnetizing
element end is opposite t'jp the sensor head.
.
Bifiv
magnetising element and
Mounting procedure of
Procedure
Item
1
magnetic sensor
.
Mount the magnetizing element is such a way as the reference hole faces
as shown in Fig. 7.3.1 when the spindle is turned by the spindle motor
normal rotation command (SFR, VCMD: Positive).
s>
2
3
Mount the magnetic sensor head so that the pin hole of
opposite to the reference hole.
-.the flange
Vp
is
\
Adjust the gap between the magnetizing, element and the sensor head, so
that the minimum gap value L becomes L = 1.5 +0-5 mm.
. p>
:>
Reference hole
. Movinig direction of mnignetizing clement
when the spindle moto:r turns in normal
direction (SFR).
r
1/,
-4-
Pin hole
.
Jr
i
'
I
4*
- v
Mapnciizing clement
-,
Sensor head
V
Fig. 7.3.1 (a)
direction of magnetizing element (Reference drawing)
•o
l.
%.
.
iU
iH
,
V
•3
7.3.2 Setting and adjustment of spindle orientation control circuit in 2-step speed change spindle for standard type
The MODEL 3 to 40 require the orientation C (A06B-6041-J120) , while MODEL
MODEL 3 require orientation C (A06B-6052-J120) , (PCB A20B-0008-0030)
is used. This circuit is set and adjusted as follows.
1) Setting and adjustment of setting terminals (SH)
Table 7.3.2 (a) shows the setting and functions of setting terminal (SH).
Select these terminals by user.
Terminal SH01 is provided for adjustment and testing at site. Set this SH01
terminal after turning on the power supply, and disconnect it after
adjustment without fail.
(Make sure that LED7 goes out).
1/2/small
Table 7.3.2 (a) Setting and functions of setting terminals (SH)
Setting and functions of setting terminals (SH)
(The double frame indicates standard setting)
Setting
(Note 1)
SH
1-2
01
02
o
x
Function
Remarks
2-3
(Note 2)
o
Sets the test model.
x
Rotates the motor shaft end
clockwise when the orientation
command is given before
operating the spindle after
turning on the power supply.
o
Rotates
Set for adjustment only.
SH03 setting takes
precedence of SH02.
This is effective only
when SH03: 1-2 are
shorted.
counterclockwise
•'
03
o
x
o
x
Orients in the direction the
spindle was turning just before
the orientation command was
given.
SH02 setting becomes
effective.
Orients the spindle counter¬
clockwise at all times.
x
x
t
Orients the spindle clockwise at
all times.
\
AM.
‘4
-
56
-
\
Setting
(Note 1)
Remarks
Function
SH
1-2
2-3
04
x
x
Since the position loop
gain of spindle is
Sets the initial orientation
speed to about 60 (spindle
position loop gain sec
spindle
.
*
in general, the
5 sec
initial speed is about
300 rpm without limita¬
) of the
tion.
o
x
Limits the initial orientation
speed to 1/3.
x
o
Limits the initial orientation
speed to
05
2/3.
o
x
For DC spindle servo unit.
x
o
For AC spindle servo unit.
_ ...
t
Note 1) o indicates short-circuit, while x indicates opening.
Note 2) Method of setting the TEST MODE.
(1) Turn on spindle orientation command.
(2) Spindle orientation end signal (0RAR1, 2) is not sent.
(3) The spindle turns at the initial orientation speed, while the SW1
(INITIALIZING BUTTON) is being depressed and the spindle stops at
the fixed position when SW1 is released.)
(4) Red LED7 lights in this mode.
2) LED display contents
Seven indicator lamps LED1
7 are mounted on spindle orientation control
circuit C PCB. The following table shows their display contents.
Neither LED1 nor LED2 is mounted on PCB of 01A version.
:
LED display contents
LED
Display contents
1
ORIENTATION
(Orientation in progress)
Lighting
color
Green
Description
Lights when spindle orientation
command is given (0RCM1 and 2 are
shorted)
2
LOW
(Clutch (gear) LOW)
Green
.
Lights when clutch X-gear) LOW
signal is turned on (*CTH1 and 2
-
are shorted)
3
MS PEAK LEVEL
Green
(Magnetic flux detection
signal peak value adjust¬
.
This adjusting indicator lights
when the peak value-kif the. magnetic
flux detection signal; (MS) exceeds
+1°
v: _"1...
ing indicator)
’*
-
57
v
1
LED display contents
LED
4
Lighting
color
Display contents
SLOWDOWN PERIOD
Description
Green
Lights when the spindle approaches
the stop position and enters
the low speed rotation area during
spindle orientation motion.
Green
Lights when the magnetic
signal (output) value is
setting range of 0.1° as
converted spindle angle.
This LED5 may also light
sensor is not positioned
magnetizing element.
(Low-speed rotation period
adjusting indicator)
5
6
IN POSITION FINE
(In-position adjusting
indicator)
IN-POSITION
flux
within the
a
when the
on the
Lights when the spindle is within
+1° of the aimed adjusting position
after completion of spindle
orientation. The spindle
Green
(In-position in progress)
orientation end signal (0RAR1 and 2
are shorted) is sent when this LED
is lighting in a mode other than
TEST mode.
7
TEST MODE
(Test mode in progress)
Red
Lights when setting terminal SH01
pins are shorted. The orientation
end signal is not sent in this mode
even if the orientation motion is
executed.
3) Setting of variable resistors
Set the variable resistor scale as shown in the following table before
starting adjustments.
Asterisked items are readjusted during adjustment procedure described later.
Set these items also as the preliminary setting.
Setting and preparation of variable resistors
Name of
variable
RV
4
1*
2*
3
5.0
6.0
© © ©
5
6*
7*
2.0
5.0
8
9*
10*
11*
12DC 12 AC
resistor
Variable
resistor
scale
position
I
-
58
-
©
2.0
5.0
5.0
0
7.0
I
(T)
Setting of RV3 and RV4
Set RV3 and RV4 according to the distance H between the rotation center
line of magnetizing element and the center of the sencer head face.
H (mm)
6CK65
Scale
position
(2)
7.0
V75
5.0
6.0
4.0
v85
>v90
a-95
vlOO
3.0
2.5
2.0
1.5
'vllO
0.5
1.0
Setting of RV5
when the spindle
Set RV5 according to the spindle HIGH revolutions N
HM
motor turns at the
2,000
NHM
(rpm)
Scale
position
rated revolutions.
v
O/
'YJ
'v
2,200
2,500
2,700
3,100
3,500
4,000
7.5
6.5
5.5
4.5
3.5
2.5
4,500
5,000
5,500
6,000
2.0
1.5
1.0
0.5
(3) Setting of RV8
Set RV8 according to the spindle
RH/L
Scale
position
HIGH/LOW reduction
gear ratio R
H/L’
-2.0
-2.2
-2.5
-2.8
-3.2
-3.7
-4.4
-5.3
-6.0
2.0
3.0
4.0
5.0
6.0
7.0
8.0
9.0
9.5
5
6
-7.0
10
7
0
9
2
1
0
10
Variable resistor scale
4) Adjustment of variable resistors
12, 12DC, and 12AC according to the following table. Adjust the
Adjust RV1
offset and gain of spindle control circuit PCB before adjusting the orienta¬
When RV12 and RV13 of the spindle control circuit PCB are
tion circuit.
changed, the stop position may be deviated.
-
-
59
-
Table 7.3.2 (b) Adjustments of variable resistors
Set the teat mode for the following adjustments by shorting SH01 pins.
Name of
Item
variable
resistor
1
RV1
Item
to
3
RV2
RV3
(specification)
TS OFFSET
Tachogenerator
(Compenoffset
sation for the
difference of the
slow down time in
normal and reverse
rotating direc¬
tion)
Compare the slow
down time during the
orientation in
normal and reverse
directions after
completion of this
adjustments
The standard setting
value is 5 divisions.
Adjust RV1 until the
difference of the
slow down time
between normal and
reverse rotation
become shorter than
0. 1 sec.
MS PEAK LEVEL
MS signal ampli¬
tude value.
Keep depressing SW1
Set VR2 to the posi¬
tion where LED3 (MS
PEAK LEVEL) starts
.
2
Adjusting method
Conditions
be adjusted
.
(initializing
button)
.
SLOWDOWN REFERENCE
flickering.
See 7.3.2 (3)
1
.
See 7.3.2 (3)
1
.
Slowdown speed
reference.
4
RV4
AMS PEAK LEVEL
AMS signal ampli¬
tude value.
5
RV5
SLOWDOWN TIME IN
HIGH MODE
Set the clutch
(gear) HIGH mode.
LED4 (SLOWDOWN
PERIOD) should
Slowdown time in
clutch (gear) high
mode
Stop the spindle at
the fixed position
by depressing SW1
once
*CTH signal
clearly light at a
moment just before
.
.
the spindle stops.
is OFF (option).
6
7
RV6
RV7
GAIN (H)
Position loop
gain.
Same as specified
above.
Turn RV6 clockwise
such an extent as
does not cause any
overshoot when the
spindle stops.
IN-POSITION (H)
Spindle stop
position (H)
Same as specified
above.
LED5 (IN-POS FINE)
should light during
lighting of LED6
(IN-POSITION)
SLOWDOWN TIME IN
LOW MODE
Set the clutch
(gear) LOW mode.
Stop the spindle at
the fixed position
by depressing SW1
once. *CTH signal
is turned on
(closed)
.
8
RV8
Slowdown the in
clutch (gear) low
mode.
to
.
.
-
60
LED (SLOWDOWN
PERIOD) should
clearly light at a
moment just before
the spindle stops.
(See item 5 in this
table. )
Name of
Item
variable
resistor
9
10
Item
RV9
GAIN (L)
Position loop
gain.
Same as specified
above
RV10
IN-POSITION (L)
Spindle stop
position (L)
Same as specified
above
.
11
12
13
RV11
Adjusting method
Conditions
adjusted
to be
.
(specification)
.
.
RV12
HIGH GAIN DC
High gain.
RV12
HIGH GAIN AC
AC
High gain.
LED 5 (IN-POS FINE)
should light during
lighting of LED6
(IN-POSITION)
.
The spindle stop
position can be
finely adjusted
within a range +1°
the spindle angle.
POSITION SHIFT
Spindle stop posi¬
tion shift.
DC
Turn RV9 cloc'lcwise
to such an extent as
does not cause any
overshoot when the
spindle stops.
Adjust RV12 when DC
spindle servo unit
is used.
Standard adjusting
value: 7 divisions.
Adjust RV12 when AC
spindle servo unit
is used.
Standard adjusting
value: 7 divisions.
After adjustments, cancel the test mode, and make sure that the LED7 (red)
goes out.
*
-
61
i
ORIEN¬
+15 CD
A OV
TATION
ovdl
150ÿ
H
i
2
LEDI
r
3
i
ir
1
6
7
INDICATORS Fdl AllJUSTINO
'r*B lkI!AK SUMIXJVTJ tN-POSITJtN IN
LEVH
PERIOD
FINE
HDSITKN
r
5
4
CN9—
'
LOW
~
LED2ÿVy
8
TEST MODS
ST1 (OV) A
OFFSET
|CD [(TEAKIEVfct
AJ
Applies to overall version number 03C and lower
Applies to overall version
number 04C and higher
RV1
r®5
LF-lXÿVy LEDSÿÿI
LED3
n
iw
LOV
EFEI3NCE
I /tp\ |(AMS
VI/ lIT.AK LEVEL
C
C
®w-1
rtVG
CQAIN
D
[®]€.TICW
l
H D
J:
E
E
DinECTICN
hJ
SH05
I
F FKPJ
RV|2
os
91102 SH03
I
F
INT.FIX
inai HA IN
AC
Applies to overall version number 04C
and higher
SH04
©
©
(MSA )( LSA)(+RS«)(75)(MnCT)(*I5)(VCWnc)(VTNin) (NNQ)
G
10
20
30
40
50
fiO
70
HO
90
UIECK TEININALS
FANUC
A20D-000D-003
i
J 1
(INTO)(AKB)( SDRF) <*G )(TSA !)( TSA2 )(0 V)
100 110 120 130
140
1ÿ0 160 2)
e.
\
II
made in JAPAN
3
4
I
J
J I
13
7
5
5
J L
I TACT I
G
_
I SWITQI 1
CNA
(INITIALIZE!
7
CHAIN
I I
L
ElSma, T .
UV11
[©fe,m
I
SWi I
6J l
f©l
nvg
DUTTCrO
8
Overall .rsion number indication
Fig. 7.3.2 Mounting positions of check terminals, variable resistors, setting pins and light-emitting diodes (LED)
(PCB A20B-0008-0030)
G
7.3.3 Setting and adjustment of spindle orientation control circuit in 2-step spindle speed for high speed
3 to 40 require the orientation G (A06B-6041-J122) , while MODEL
MODEL 3 require orientation GS (A06B-6052-J122) , (PCB A20B-0008-0031)
is used. This circuit is set and adjusted as follows.
1) Setting and adjustment of setting terminals (SH)
Table 7.3.3 (a) shows the setting and functions of setting terminal (SH).
Select these terminals by user.
Terminal SH01 is provided for adjustment and testing at site. Set this SH01
terminal after turning on the power supply, and disconnect it after
adjustment without fail.
(Make sure that LED7 goes out).
The MODEL
1/2/small
Table 7.3.3 (a) Setting and functions of setting terminals (SH)
Setting and functions of setting terminals (SH)
(The double frame indicates standard setting)
Setting
(Note 1)
SH
1-2
01
02
03
Remarks
Function
2-3
(Note 2)
o
Sets the test model.
o
x
Rotates the motor shaft end
clockwise when the orientation
command is given before
operating the spindle after
turning on the power supply.
x
o
Rotates
o
x
Orients in the direction the
spindle was turning just before
the orientation command was
Set for adjustment only.
SH03 setting takes
precedence of SH02.
This is effective only
xjhen SH03: 1-2 are
shorted.
counterclockwise
given.
x
o
Orients the spindle counter¬
clockwise at all times.
X
x
Orients the spindle clockwise at
all times.
-
63
-
SH02 setting becomes
effective.
Setting
(Note 1)
Function
SH
1-2
2-3
04
x
x
Sets the initial orientation
speed to about 60 (spindle
Since the position loop
gain of spindle is
position loop gain sec
in general, the
5 sec
initial speed is about
300 rpm without limita¬
tion.
spindle
05
Remarks
*
of the
.
o
x
Limits the initial orientation
speed to 1/3.
x
o
Limits the initial orientation
speed to 2/3.
o
x
For DC spindle servo unit.
x
o
For AC spindle servo unit.
Note 1) o indicates short-circuit, while x indicates opening.
Note 2) Method of setting the TEST MODE.
(1) Turn on spindle orientation command.
(2) Spindle orientation end signal (0RAR1, 2) is not sent.
(3) The spindle turns at the initial orientation speed, while the SW1
(INITIALIZING BUTTON) is being depressed and the spindle stops at
the fixed position when SW1 is released.)
(4) Red LED7 lights in this mode.
I
2) LED display contents
Seven indicator lamps LED1
7 are mounted on spindle orientation control
circuit G and GS PCB. The following table shows their display contents.
LED display contents
Lighting
color
LED
Display contents
1
ORIENTATION
(Orientation in progress)
Green
LOW
Green
2
Description
Lights when spindle orientation
command is given (0RCM1 and 2 are
shorted)
.
(Clutch (gear) LOW)
Lights when clutch (gear) LOW
signal is turned on (*CTH1 and 2
are shorted)
3
MS PEAK LEVEL
Green
(Magnetic flux detection
signal peak value adjust¬
ing indicator)
-
64
.
This adjusting indicator lights
when the peak value of the magnetic
flux detection signal (MS) exceeds
+10 V.
LED display contents
Lighting
color
Description
LED
Display contents
4
SLOWDOWN PERIOD
(Low-speed rotation period
adjusting indicator)
Green
Lights when the spindle approaches
the stop position and enters
the low speed rotation are a during
spindle orientation motion.
5
IN POSITION FINE
(In-position adjusting
Green
Lights when the magnetic
signal (output) value is
setting range of 0.1° as
converted spindle angle.
This LED5 may also light
sensor is not positioned
magnetizing element.
indicator)
6
IN-POSITION
TEST MODE
a
when the
on the
•->
Green
Lights when the spindle is within
+1° of the aimed adjusting position
after completion of spindle
orientation. The spindle
orientation end signal (0RAR1 and 2
are shorted) is sent when this LED
is lighting in a mode other than
TEST mode.
Red
Lights when setting terminal SH01
pins are shorted. The orientation
end signal is not sent in this mode
even if the orientation motion is
executed.
(In-position in progress)
7
flux
within the
(Test mode in progress)
3) Setting of variable resistors
Set the variable resistor scale as shown in the following table before
starting adjustments.
Asterisked items are readjusted during adjustment procedure described later.
Set these items also as the preliminary setting.
Setting and preparation of variable resistors
Name of
variable
RV
1*
2*
5.0
5.0
3
4
5
6*
7*
8
9*
©
5.0
5.0
©
5.0
10*
II*
12DC 12 AC
resistor
Variable
resistor
scale
position
© ©
-
65
-
5.0
5.0
0
8.0
(T)
Setting of RV3 and RV4
Set RV3 and RV4 according to the distance H between the rotation center
line of magnetizing element and the center of the head face.
H (mm)
Scale
position
(2)
*50
*55
*60
*65
*70
*80
*90
*100
*110
9. 5
7. 0
5. 0
4.0
3. 0
2. 5
2.0
1.5
1.0
1.0
Setting of RV5
Set RV5 according to the spindle HIGH revolutions N
when the spindle
HM
motor turns at the rated revolutions.
NHM
(rpm)
Scale
position
(3)
40*45
6,000
'b
<b
6,500
7,000
7,500
8,000
8,500
6.0
5.0
4.5
4.0
3.5
Setting of RV8
Set RV8 according to the spindle
,
H/L
R
Scale
position
a,
'b
9,000
9,500 10,000 11,000 12,000
3.0
2.5
2.5
HIGH/LOW reduction
2.0
gear ratio R
H/L*
*2. 2
*2.5
*2.8
*3. 2
*3.7
*4.5
*5.0
*6. 0
*7.0
2. 0
3.0
4.0
5.0
6.0
7. 0
8.0
8.0
9.0
4
•V
1.0
5
6
7
B
2
9
1
0
10
Variable resists! scale
4) Adjustment of variable resistors
Adjust RV1 - 12, 12DC, and 12AC according to the following table. Adjust the
offset and gain of spindle control circuit PCB before adjusting the orienta¬
When RV12 and RV13 of the spindle control circuit PCB are
tion circuit.
changed, the stop position may be deviated.
-
66
-
Table 7.3.3 (b) Adjustments of variable resistors
Set the test mode for the following adjustments by shorting SH01 pins.
Item
1
Name of
variable
resistor
RV1
Item
adjusted
be
to
TS OFFSET
Tachogenerator
(Compenoffset
sation for the
difference of the
slow down time in
normal and reverse
rotating direc¬
tion)
.
2
RV2
MS PEAK LEVEL
MS signal ampli¬
tude value.
3
RV3
Adjusting method
Conditions
(specification)
Compare the slow
down time during the
orientation in
normal and reverse
directions after
completion of this
adjustments
The standard setting
value is 5 divisions.
Adjust RV1 until the
difference of the
slow down time
between normal and
reverse rotation
become shorter than
0.1 sec.
Keep depressing SW1
Set VR2 to the posi¬
tion where LED3 (MS
PEAK LEVEL) starts
flickering.
.
(initializing
button)
.
SLOWDOWN REFERENCE
See 7.3.3 (3)
1
.
See 7.3.3 (3)
1
.
Slowdown speed
reference
.
4
RV4
AMS PEAK LEVEL
AMS signal ampli¬
tude value.
5
RV5
SLOWDOWN TIME IN
HIGH MODE
Slowdown time in
clutch (gear) high
mode.
6
RV6
GAIN (H)
Position loop
gain.
Set the clutch
(gear) HIGH mode.
Stop the spindle at
the fixed position
by depressing SWl
once
*CTH signal
is OFF (option)
.
LED4 (SLOWDOWN
PERIOD) should
clearly light at a
moment just before
the spindle stops.
.
Same as specified
above
.
Turn RV6 clockwise
to such an extent as
does not cause any
overshoot when the
spindle stops.
7
RV7
IN-POSITION (H)
Spindle stop
position (H)
8
RV8
.
Same as specified
above
.
LED 5 (IN-POS FINE)
should light during
lighting of LED6
(IN-POSITION)
SLOWDOWN TIME IN
LOW MODE
Slowdown the in
Set the clutch
(gear) LOW mode.
Stop the spindle at
clutch (gear) low
mode.
the fixed position
by depressing SWl
*CTH signal
once
is turned on
(closed)
.
.
-
67
.
LED ( SLOWDOWN
PERIOD) should
clearly light at a
moment just before
the spindle stops.
(See item 5 in this
table. )
Name o f
Item
variable
resistor
9
10
11
12
13
RV9
RV10
RV11
Item
GAIN (L)
Position loop
gain.
Adjusting method
(specification)
Same as specified
above
Turn RV9 clockwise
to such an extent as
does not cause any
overshoot when the
spindle stops.
IN-POSITION (L)
Same as specified
Spindle stop
position (L)
above.
LED5 (IN-POS FINE)
should light during
lighting of LED6
(IN-POSITION)
.
.
.
POSITION SHIFT
Spindle stop posi¬
tion shift.
RV12
HIGH GAIN DC
DC
High gain.
RV12
HIGH GAIN AC
High gain.
AC
Conditions
to be adjusted
The spindle stop
position can be
finely adjusted
within a range +1°
the spindle angle.
Adjust RV12 when. DC
spindle servo unit
is used.
Standard adjusting
value: 7 divisions.
Adjust RV12 when AC
spindle servo unit
is used.
Standard adjusting
value: 7 divisions.
After adjustments, cancel the test mode, and make sure that the LED7 (red)
goes out.
-
68
-
A
+150
&
-15D
i
2
r
r
1 I
1
8
7
6
INDICATORS PCR ADJUSTING
TEST MDE
'MS PEAK elXXMXJW iN-I'Oii if ItN IN
ORIEN¬
LOW
LEVEL
PERIOD
TOSITHN
FINE
TATION
LED7
LIEI xfijUZrz'ifij LED3
1
1I
CN9
i
'
i
5
'
3
RVI
jOrrecr
Isn[ ©
LEDJÿy LED5ÿ?; LEDiÿJ
STI(oV) A
r
A1
B
-1
J
B
[©lik
[®)(E
FENCE
c
LEVEL
»
C
[©1Sptwi]
[©]COVIN
RVC
D
l@HS.TW.
I
o>
I
DinECTICN
r
31102 3H03
I
2
3
It
F
3
F
INT.FDC
F
J:
1©]ÿ“ÿ]
E
VD
H D
SH05
RV12
DC
AC
inai
ov IN
Jg
SH04
©
©
l
( MSA )( L3A) (+FVD) (7S ) (MDST ) (+IiJ) (VCMD2) ( V(MD3) (NNQ) ( INTX3)(A>£3)( SDRF) (AC )(T3A1)(T9A2)( 0 V)
fiO
70
50
100
BO
1 10 1 20
140 1$0 160 2D
90
1 30
40
30
20
10
CHECK TEIMINAl-3
J L
made in JAPAN
FANUC
A20B-0008-0031
2
JI
3
J L
4
5
_
_
) |
3
I TACT
6
I
CNA
13
7
_1
iI
awi
SWITOI
I
I
I
m
L
7
I
L
HE™ T .
[©&"
(INITIALIZING DGITCN)
6
COVIN
E
8
Overall version number indication
Fig. 7.3.3 Mounting positions of check terminals, variable resistors, setting pins and light-emitting diodes (LED)
(PCB A20B-0008-0031 )
G
7.3.4 Setting and adjustment of spindle orientation control circuit in case of 3-step spindle speed change
PCB A20B-0009-0520 is employed as spindle orientation control circuit D
(A06B-604 1— J1 21)
This paragraph describes the setting and adjusting methods of
.
this circuit.
Note) Be careful since the maximum spindle revolution range is limited at each
speed change step.
Maximum spindle
revolution range
High speed
4000
Medium speed
1000
Low speed
250
-
8000 rpm
2000 rpm
677 rpm
1) Setting and functions of setting terminals (SH) same as in 7.3.2
2) LED display contents
LED No.
Symbols
Lighting
color
Description
LED1
ORIENTATION
Green
Lights when orientation
command is input.
LED2H
GEAR/CLUTCH
Green
Lights when gear /clutch is set to
high positions.
LED2M
Lights when gear/clutch is
medium position.
LED2L
Lights when gear/clutch is set to
low position.
set to
LED3
MS PEAK LEVEL
Green
Lights when the peak value of MS
signal from magnetic sensor is
higher than +10 V.
LED4
SLOWDOWN PERIOD
Green
Lights during the period from the
constant low speed just before
completion of orientation to the
arrival of magnetizing sensor at
the sensor position.
LED5
IN-POSITION FINE
Green
Lights when the spindle is
positioned within +0.1° of the stop
position after completion of
orientation.
LED 6
IN-POSITION
Green
Lights when the spindle is
positioned within +1.0° of the stop
position after completion of
orientation. Orientation end
signal is sent when this LED is
lighting in a mode other than TEST
mode.
LED 7
TEST MODE
Lights when setting terminal SH01
is shorted across 01 and 02.
Red
70
3) Adjustments
Observe the following procedure in the test mode after turning on the power
supply.
Item
1
Variable
resistor
RV1
Adjustment item
Conditions
Adjusting method
TS OFFSET
Tachogenerator
(Compenoffset
sation for the
difference of the
slow down time in
normal and reverse
rotating direc¬
tion)
Compare the slow
down time during the
orientation in
normal and reverse
directions after
completion of this
adjustments
The standard setting
value is 5 divisions.
Adjust RV1 until the
difference of the
slow down time
between normal and
reverse rotation
become shorter than
0. 1 sec.
MS PEAK LEVEL
MS signal ampli¬
Keep depressing SW1
Set VR2 at the posi¬
tion where LED3
beging flickering.
Check the distance
from the spindle
center to the sensor
head.
Set RV3 and RV4
according to
(Note 1).
LED4 should clearly
light for a moment
(about 0.2 sec) just
before stopping.
.
2
RV2
.
tude value.
3
RV3
SLOWDOWN REFERENCE
(Slowdown speed
reference. )
4
RV4
AMS PEAK LEVEL
(AMS signal ampli¬
tude value.)
5
RV5
SLOWDOWN TIME
Repeat turning on
(HIGH)
(Slowdown time)
and off SW1 while
LED2H (clutch (gear)
HIGH) is lighting.
6
RV6
Turn RV6 clockwise
GAIN (HIGH)
(Position loop
to such an extent as
does not cause any
gain)
overshoot when the
spindle stops.
7
RV7
IN-POSITION (H)
(Spindle stop
position adjust¬
ment)
Same as above
Adjust RV7 so that
LED5 lights con¬
currently while LED6
is lighting. LEDS
may flicker.
8
RV8
SLOWDOWN TIME
Repeat turning on
and off SWI, while
LED2L (clutch (gear)
LOW) is lighting.
Same as in item 5 in
this table.
(LOW)
(Slowdown time)
9
RV9
GAIN (LOW)
(Position loop
Same as in item 6 in
this table.
gain)
-
71
Item
Variable
resistor
Adjustment item
10
RV10
IN-POSITION (LOW)
Conditions
(Spindle stop
position adjust¬
ment)
Adjusting method
Repeat turning on
and off SW1, while
LED2L (clutch (gear
LOW) is lighting.
Same as in item 7 in
this table.
11
RV11
SLOWDOWN TIME
(MEDIUM)
(Slowdown time)
Repeat turning on
and off SW1 while
LED2M (clutch (gear
MEDIUM) is light¬
Same as in item 5 in
this table.
12
RV13
GAIN (MEDIUM)
(Position loop
gain)
ing.
Same as in item 6 in
13
14
RV14
this table.
IN-POSITION
(MEDIUM)
(Spindle stop
position adjust¬
ment)
RV11
Same as in item 7 in
this table.
POSITION SHIFT
The spindle stop
(Spindle stop
position shift)
position can be
finely adjusted down
to
+1°
angle
.
at
spindle
Set the key position
of ATC arm to the
keyway position of
spindle.
15
RV15DC
HIGH GAIN DC
High gain
Adjustment using DC
spindle servo unit.
Standard adjusting
value: 0 division.
16
RV15AC
HIGH GAIN AC
High gain
Adjustment using AC
spindle servo unit.
Standard adjusting
value: 7 divisions.
Reset the test mode after adjustments.
Note 1) Adjust RV3 and RV4 according to the distance
center to the sensor as follows.
H (mm)
RV3, 4 scale
50
60
70
80
90
100
110
120
9.5
6.5
4.5
3.0
2.2
1.5
1.0
0.5
Spindle
(H)
from the spindle
,7
3.
2
i
.8
o
10
Variable resistor
scale divisions
.Magnetizing element
Sensor
H (mm)
-
72
/
n
A
{
1 5 ) ( »5 ) (OV) (-IS) IWSA)
RVl S 1 2DQ'AC
fe[|[©T©1
E
A
I
mw
CN9
(LSA)(*f«T»(ZSHMIlSTH*lS)tV(NDS!)
Applies to overall version number 05B and higher.
rORIEJi- -irTSA
lrUS PEAK-,r3LCWDW TAkflPEAK JT
1REFERTMIÿ LEVEL
WATIGNJLOFFSERJJJ4SX2L
r
i*
RV3
RV 2
RV<
LEDi
®
RVl
@3
( WO) ( R/Tfl) (AMS ) (5DRF) (M3 ) (TSAI ) (TSA2 )(0 V)
OOOO OO (>000
-OOOO OOOOOO
6
3
5
4
7
p \&\ Hi
.
"[
CEAJVOJ)
H
STI
TCH)
L
M
Ljli2 111 L£EC Ml LpW
LED4
1
l.
K?5
M'n
lff»
RV6
RVl 3
RV9
RVl 4
RVl 0
HI 11IS
IJSS J*, m n m
rir*-posiÿ
12
B
LEDS
flN-POSl-*] LEDG
C
RV7
(ÿUN)
n m H[£•)
%
LED7
r
~
8W 1
D
3101
TEST MCDE
UJ
H
nos mar
E
I
RVl 1
F
II II
G
—
A2 OB— 00 0 9 0 5 20/|
1
2
20
13
9402 SH04
MADE IN JAPAN
SH03
3
4
J
u
7
5
_
14
B
1 CNA
7
8
j
L
\ Overall version number
Fig. 7.3.4 Mounting positions of check terminals, variable resistors, setting pins, and light emitting diodes (LED)
(PCB A20B-0009-0520)
9
SHIFT
7.3.5 Method of checking the spindle position loop gain
spindle position loop gain can be checked according to the following
procedure. Check it after adjusting the spindle orientation control circuit.
The
Procedure of checking the spindle position loop gain
1
Set the mode to TEST mode (LED7 ON) after shorting setting terminal SH01
pins
.
2
Release setting terminal SH04 1-2 and 2-3 pins to release the speed
limitation of orientation.
3
Measure spindle revolutions Ns (H) , Ns(L) rpm when SW1 (INITIALIZING
button) is depressed (turned on) and the spindle clutch (gear) is set to
HIGH (*CT *CTH1, 2: Open) and LOW (*CTH1, 2: Closed), respectively.
4
The spindle position loop gain can be obtained by the following formula.
(sec_1)
K (H or L) = N (H or L)
55
s
P
where K (H) : Position loop gain when the spindle is set to HIGH gear
(clutch).
K (L) : Position loop gain when the spindle is set to LOW gear
(clutch).
*
-
74
t
II.
AC SPINDLE SERVO UNIT
(380/415V AC INPUT)
1.
OUTLINE
This Section describes maintenance of the
unit
.
380/415V
AC input type spindle servo
1.1 Configuration
The
AC380/415V AC spindle
Model Name
Model 30
Model 40
2.
servo unit consists of the unit, PC board, and ROM.
Specification
DWG No.
Unit DWG
No.
A06B-6054
-HO 30
A06B-6054
A06B-6054
-H040
A06B-6054
-C040
PCB
DWG No.
-C040
A20B-1001
-0620
ROM
Specified
DWG No.
Classification
A06B-6054
-C530
JUA
A06B-6054
-C540
JUB
DAILY MAINTENANCE AND MAINTENANCE TOOL
See item 2 in Chapter I in this manual.
3.
INSTALLATION
supply line, power line and signal line connections, refer to the
A single-phase AC220V power supply line
connection is added to this unit. The fan for AC spindle motor cooling employs
a 3-phase motor.
For a signal line soft start/stop cancel SOCN is added
thereto.
For power
"Connection Diagram" in Appendix 1.
77
4.
SETTING AND ADJUSTMENT
4.1 Setting on PCB
For the location on the PCB, refer to the "Parts Location" in Appendix 6.
Before turning power ON, check the following setting.
Table 4.1 (a) Setting
Setting
terminal
Setting at
Contents
shipment
from factory
Setting
number
SI
S2
Machine ready
signal (MRDY)
Analog over¬
Used
OFF
o
ON
Used
OFF
0] ON
OFF
Same as the
o
ON
0]
Velocity
command signal
o
ON
0]ON
Not used
OFF
0o-l
Use of
external
analog voltage
command
Use of R01
-
ON
ON
OFF
OFF
0JON
o
|]J0N
ON
R12 commands
Setting of
velocity
feedback
ON
Used
above
S5A
S5B
0
o
Not used
S4
OFF
' ON
o
Not used
ride
S3
0— 1
S5A
S5B
2000 rpm
OFF
OFF
3500 rpm
ON
OFF
4500 rpm
OFF
ON
Not used
ON
ON
amount to
rated command
S8
Delay time
required until
motor is de¬
energized
0 sec/option
OFF
0
o
0.2 sec/
standard
ON
I
78
0]ON
o
ON
(Note 1)
Setting at
Setting
terminal
number
Sll
Soft
start/
shipment
from factory
Setting
Contents
0.6
8 sec
A
o
B
3.5
40 sec
B
0
B
A
stop time
constant
switching
(Adjust by
RV20)
o
A
Note 1) Insert a short bar without fail even when setting is turned off.
RV19 of the spindle control circuit PCB have been
Variable resistors RV1
adjusted at factory before shipment, and their adjustments are no longer
necessary, in principle.
However, the set values of variable resistors shown in Table 4.1 (b) are
changeable as required.
Readjust variable resistors shown in Table 4.1 (c)
after turning on the power supply, if fine adjustment is required for offset,
rotating speed, etc.
1) Variable resistors whose
set
values are changeable.
Table 4.1 (b)
Variable
resistor
number
Use
Standard adjustment at
shipment from factory
Setting
change method
RV3
Set speed arrival
level
Sends speed arrival signal
when the motor speed reaches
85 - 115% of the command
speed.
See appendix 8.
RV4
Speed detection
level
3% of the maximum speed is
detected
See appendix 8.
RV5
Torque limit value
See appendix 8.
RV20
Soft start/stop
time constant
adjust
See appendix 8.
(Note 1)
.
-
79
2) Variable resistors for fine adjustment of offset and rated speed.
Table 4.1 (c)
Variable
resistor
number
Use
Adjusting method
RV1
Adjusts the velocity command voltage level.
See appendix 8.
RV2
Adjusts the velocity command voltage offset.
See appendix 8.
RV9
Finely adjusts the rated speed in normal rotation
(SFR)
See appendix 8.
(Note 2)
Rll
Finely adjusts the rated speed in reverse
rotation (SRV)
See appendix 8.
(Note 2)
R13
Adjusts the offset when zero speed is commanded.
See appendix 8.
.
.
Note 1) For details, refer to the "PCB Adjustment" in Appendix 8 in this manual.
Note 2) Adjust the number of revolution both in the forward direction (CCW) and
the reverse direction (CW) , using RV9.
-
80
5.
TROUBLESHOOTING AND COUNTERMEASURE
See item 3 in Chapter I in this manual.
-
81
i
III.
DIGITAL AC SPINDLE SERVO UNIT
(MODEL 3 ~ 22)
1.
OUTLINE
This is the manual that describes maintenance of digital AC spindle servo unit
(MODEL 3
22).
-
1.1
Configuration
Digital AC SPINDLE SERVO UNIT consists of unit part, printed circuit board, and
ROM.
Table 1.1 Element of configuration
Name of
AC
spindle
servo
Specification of
spindle servo unit
Specification
of unit part
*Note
*Note
A06B-6055-H103#H500
A06B-6055-H203#H500
A06B-6055-H103
A06B-6055-H203
unit
MODEL 3
6000rpm
MODEL 6
A06B-6055-H106//H501 A06B-6055-H106
6000rpm
A06B-6055-H206//H501
A06B-6055-H206
MODEL 8
A06B-6055-H108//H502
A06B-6055-H208//H502
A06B-6055-H108
A06B-6055-H208
4500rpm
6000rpm
A06B-6055-H108//H503
A06B-6055-H208//H503 1
MODEL 12
4500rpm .
A06B-6055-H112#H504
A06B-6055-H212//H504
MODEL 12
A06B-6055-H112#H505
A06B-6055-H212//H505
MODEL 8
6000rpm
MODEL 15
A06B-6055-H115//H506
4500rpm
A06B-6055-H215//H506
A06B-6055-H112
A06B-6055-H212
A06B-6055-H115
A06B-6055-H215
Specifi¬
cation of
printed
ROM
circuit
board
Specifications
Type
A20B-1001
-0120
A06B-6055-H500
9600
A06B-6055-H501
9601
A06B-6055-H502
9602
A06B-6055-H503
9603
A06B-6055-H504
9604
A06B-6055-H505
9605
A06B-6055-H506
9606
A06B-6055-H507
9607
MODEL 15
A06B-6055-H115//H507
6000rpm
A06B-6055-H215(/H507
MODEL 18
A06B-6055-H118//H508
A06B-6055-H218//H508
A06B-6055-H118
A06B-6055-H218
A06B-6055-H508
9608
4500rpm
MODEL 22
A06B-6055-H122#H510
9610
A06B-6055-H222#H5 10
A06B-6055-H122
A06B-6055-H222
A06B-6055-H5 10
4500rpm
High¬
speed
MODEL 3
12000rpm
A06B-6055-H103//H512
A06B-6055-H203//H512
A06B-6055-H103
A06B-6055-H203
A06B-6055-H5 12
9612
A06B-6055-H108//H513
A06B-6055-H208#H513
A06B-6055-H108
A06B-6055-H208
A06B-6055-H513
9613
High¬
speed
MODEL 6
12000rpm
Note) Upper:
Lower:
Internal ventilation type
External radiation type
-
85
t
2.
DAIRY MAINTENANCE AND INSTRUMENTS FOR MAINTENANCE
See this maintenance manual, item 2 in Chapter I.
3.
INSTALLATION
See this
The same interface as for the conventional model is applied.
maintenance manual, item 4 in Chapter I, for procedure of installation, wiring
connection of power supply, and AC spindle motor connection.
-
86
-
4.
SETTING
Setting and
Setting is the same on the unit as for the . conventional model.
setting
been
into
changed
parameter
board
has
adjustment of the printed circuit
the
See
volume,
however.
with
from setting by short pin and adjustment
following instructions for setting.
4.1 Method of Parameter Setting
4.2 Number and Contents of Parameter
4.3 Rank at Setting
4.1 Method of Parameter Setting
Setting switch and display are configured on the printed circuit board as
follows
Check and change of setting for each mode can be made by operating
this switch as shown in the next page.
.
Display
oOOOQ
O uu uu
Setting switch
HE
o
UP
o
1) For checking present mode
a) Number of rotation is shown (in five digits) on the display normally.
Present mode number is indicated when "MODE" key is turned ON.
Mode number is indicated in two digits as
2) For checking setting data
a) Select the mode (parameter)
following procedure.
"F-XX".
the data that needs be checked in the
of
"DOWN"
b) Keep pressing four buttons "MODE",
for more than one second.
UP
’
c) Display is changed from blank
'Q
5
"DATA" key
simultaneously
SET
to
d) Turn OFF all the switches.
e) Present mode is displayed when "MODE" key is ON.
f) One mode is increased when
key is ON with "MODE" key ON.
g) More modes are continuously increased when
key ON.
h) One mode is subtracted when
"DOWN"
o
key is kept ON with "MODE"
key is ON with "MODE" key ON.
87
i) More modes are continuously increased when "DOWN" key is kept ON with
"MODE" key ON.
0
j) Data is displayed (in four digits) 0.5 second later when "MODE" key is
turned OFF.
k) Rotation number display is made in about 10 seconds after data display is
made
.
When all the switches are turned off, rotation number is displayed finally no
what the mode may be.
matter
3) For changing data
a) Refer to the procedure shown in (b) to (i) to select the mode (parameter)
to be changed.
b) Data is displayed in about 0.5 second after "MODE" key is turned OFF.
c) One data is increased when
key is ON.
up
d) More data is continuously increased when
e) One data is subtracted when
"DOWN"
key is kept ON.
key is ON.
f) More data is continuously increased when "DOWN" key is kept ON.
g) Motor is controlled by the data displayed.
h) Keep
"DATA" key
SET
change
ON for more than a second to replace by the data after
.
i) Display is changed from blank
completion of change.
for
to
j) Follow the procedure from a) for another data change.
k) Rotation number display is made in about 10 seconds after all the switches
are turned OFF. As for F-13, F-14, and F-30, rotation number display is
made about two seconds later, however.
4.2 Number and Contents of Parameter
1) Display of motor revolution number
Mode number
Display data (five digits)
Displays motor revolution
number (rpm)
F-00
2) Machine ready signal (MRDY) :
Mode number
F-01
Explanation:
Contents of data
Use/Non-use
Display data (four digits)
Contents of data
0, 1 (Standard setting:
0001
...
When machine ready signal (MRDY) is used
When machine ready signal (MRDY) is not used
-
88
-
Data
1
0
1)
3)
Use/Non-use of override function
Mode number
Display data (four digits)
F-02
Contents of data
0, 1 (Standard setting:
0001
Explanation:
1)
Data
1
...
When override function is used
When override function is not used
0
4) Override range setting
Mode number
0, 1 (Standard setting:
0001
F-03
Explanation:
Caution:
Contents of data
Display data (four digits)
Upper limit of override range =
Upper limit of override range =
-
1)
Data
120%
100%
—
—
1
0
When velocity override is not used for the mode F02 setting data =
0, set "0" into the setting data.
5) Setting of kind of velocity command (External analog voltage, DA converter)
Mode number
Display data (four digits)
F-04
Explanation:
Contents of data
0, 1 (Standard setting:
0001
When external analog voltage is used
When DA converter is used
0)
Data
0
1
6) Setting of maximum revolution number
Mode number
Display data (four digits)
Contents of data
0-3 (setting is performed
with motor specifications.)
F-05
Explanation:
Standard specification
-
High-speed specification
Setting data
5000 rpm
-
10000 rpm
0
6000 rpm
-
12000 rpm
1
-
15000 rpm
2
-
20000 rpm
3
- 89 -
7) Output limit pattern setting
Display data (four digits)
Mode number
F-06
0-3 (Standard setting:
0000
Explanation:
Contents of data
No other
function.
A. Output
conventional type units are equipped with this
Select a proper pattern specified as follows.
limiting is made
only
acceleration
and
at
deceleration. Acceleration/deceleration is slowly made and
operation is made with rated output at normal rotation.
(Setting data: 1) (A similar function to soft start/stop)
B. Acceleration/deceleration is made with maximum rated output,
and output limiting is made at normal rotation.
(Setting
data: 2)
C. Alteration of output specification is made for the machine
with motor and amplifier of the identical specifications.
(Setting data: 3)
Setting data
Contents
Output limiting is not made.
0
Output limiting is made only at
acceleration/deceleration.
Output limiting is made at normal rotation, not at
1
acceleration/deceleration.
2
Output is limited for all operations.
3
Output limit pattern 1
Setting data = 1, 2, 3
Output
Pm
1 1 0 096
(F - 0 7)
f
x Pm
Pou t=
1 0 0
0
Nb
Nm
Number of rotations
Output limit pattern 2
Setting data = 4, 5, 6
Output
Pm
1 0 096
(F-07)
x Pm
Pou t=
1 0 0
0
0)
Nb
Nm
Number of rotations
90
8) Setting of limit value at output limit
Display data (four digits)
Mode number
0
0100
F-07
Explanation:
Contents of data
-
100(Standard setting: 100)
Set the value to be limited at 100% of maximum rated output
(overload tolerance).
It is effective at output limit set on the mode F-06.
Output limit value = Maximum rated output x (Setting data) %
9) Delay time before cutting motor power supply
0
0005
F-08
Explanation:
Contents of data
Display data (four digits)
Mode number
-
255 (Standard setting:
5)
Delay time from zero speed signal detection to motor power
supply disconnection is set.
Delay time = (Setting data) x 40 msec.
10)
Use/Non-use
of
motor
supply
power
shutting off by machine ready signal
(MRDY)
Mode number
Display data (four digits)
F-09
Explanation:
Contents of data
0, 1 (Standard setting:
0000
0)
frequent switching of electro-magnetic
Only motor power supply is shut off
while electro-magnetic contactor stays ON, when machine ready
signal (MRDY) is turned OFF.
It
is
used
when
contactor is expected.
Data
1
0
...
When this function is used
When this function is not used
11) Velocity deviation offset adjustment at forward rotation command (SFR)
Mode number
F-10
Explanation:
Display data (four digits)
Contents of data
0
0128
-
255(Standard setting: 128)
This adjustment is made in order to stop motor at the time
forward rotation command (SFR) and velocity command voltage,
Add more data (UP) to
0V (zero rotation command) are given.
stop the motor turning counterclockwise (CCW) relatively to
its shaft.
-
91
12) Velocity deviation offset adjustment at reverse rotation command (SRV)
Mode number
F-ll
Explanation:
Display data (four digits)
0128
Contents of data
0
-
255(Standard setting: 128)
This adjustment is made in order to stop the motor at the time
reverse rotation command (SRV) and velocity command voltage,
OV (zero rotation command) are given.
Add more data (UP) to
stop the motor turning counterclockwise (CCW) relatively to
its shaft.
13) Speed deviation offset adjustment at orientation command (ORCM)
Mode number
F-12
Explanation:
Display data (four digits)
0128
Contents of data
0
-
255 (Standard setting: 28)
Use this parameter for adjustment in case LED 06 IN-POSITION
FINE can not be illuminated by adjustment volume on the
orientation circuit at orientation.
14) Rotation number adjustment at forward rotation command (SFR)
Mode number
Display data (four digits)
0
F— 13
Explanation:
Contents of data
-
255 (Setting is based on
specification.)
motor
Rotation number is adjusted as specified by the command when
velocity command is input at forward rotation command (SFR).
Increase more data (up) to increase rotation number.
15) Rotation number adjustment at reverse rotation command (SRV)
Mode number
Display data (four digits)
0
F-14
Explanation:
Contents of data
-
255 (Setting is based on
specification.)
motor
Rotation number is adjusted as specified by the command when
velocity command is input at reverse rotation command (SRV).
Increase more data (up) to increase rotation number.
16) Setting of rotation number at velocity command voltage, 10 V
Mode number
Display data (four digits)
0 - Rated rotation number
(Setting is based on motor
specification. )
F-15
Explanation:
Contents of data
Make sure to have this setting when rotation adjustment of
(14) and (15).
Set the value which rotation number at
velocity command voltage, 10 V is divided by 100.
Rotation number (rpm) at velocity command voltage, 10V= (Setting data)xl00
-
92
-
17) Detection range of velocity arrival signal (SAR)
Display data (four digits)
Mode number
0
0015
F-16
Explanation:
Contents of data
-
100 (Standard setting: 15)
Setting of detection range of velocity arrival signal is made.
Speed arrival signal (SAR) is fed (ON) when motor revolution
number reaches to +(set data)% of command rotation number.
Detection range = Command rotation number x within +(Set data)%
18) Detection range of speed detection signal (SDT)
Display data (four digits)
Mode number
0
0003
F-17
Explanation:
Contents of data
-
100 (Standard setting:
3)
Setting of detection range of speed detection signal (SDT) is
made
Speed detection signal (SDT) is fed (ON) when motor
revolution number becomes less than the (set data)% of maximum
number of revolution.
.
Detection range = Maximum number of revolution x less than the (Set data)%
19) Setting of torque limit value
Display data (four digits)
Mode number
F- 18
0
0050
Explanation:
Contents of data
-
100 (Standard setting: 50)
Setting of torque limit value at torque limit signal (TLMH) ON
is made.
Torque limit value = Maximum rated torque x (Set data)%
20) Setting of
acceleration/deceleration
Mode number
F-19
Explanation:
time
Display data (four digits)
0010
Contents of data
0
-
255 (Standard setting: 10)
This setting is made when acceleration time from
maximum rotation number is more than five seconds.
Set value = Acceleration time (Second) x 2
-
93
stop
to
21) Limiting of regenerated power (adjustment of deceleration time)
Mode number
F-20
Explanation:
Display data (four digits)
0060
Contents of data
0
-
Adjust the deceleration time so that it is the same as
acceleration time.
Deceleration time is shortened when
setting value is large. Deceleration time gets longer when it
is small. Motor may make abnormal sounds if regenerated power
is excessively large, as the regeneration limit circuit
functions to change the waveform of the motor current. Make
the setting smaller in such a case.
22) Setting of velocity control phase compensation P:
Mode number
F-21
Display data (four digits)
0050
0
F-22
Display data (four digits)
0050
HIGH gear (CTH = 1)
Contents of data
-
23) Setting of velocity control phase compensation P:
Mode number
100 (Standard setting: 60)
255 (Standard setting: 50)
LOW gear (CTH = 0)
Contents of data
0
-
255 (Standard setting: 50)
24) Setting of velocity control phase compensation P at orientation:
(CTH = 1)
Mode number
F-23
Display data (four digits)
0100
Contents of data
0
-
255(Standard setting: 100)
25) Setting of velocity control phase compensation P at orientation:
(CTH = 0)
Mode number
F-24
Display data (four digits)
0100
0
F-25
Display data (four digits)
0030
-
0
F-26
Display data (four digits)
0030
94
-
HIGH gear (CTH = 1)
-
255 (Standard setting: 30)
LOW gear (CTH = 0)
Contents of data
0
-
255 (Standard setting: 100)
Contents of data
27) Setting of velocity control phase compensation I:
Mode number
LOW gear
Contents of data
26) Setting of velocity control phase compensation I:
Mode number
HIGH gear
-
255 (Standard setting: 30)
28) Setting of velocity control phase compensation I at orientation:
HIGH gear
(CTH = 1)
Mode number
Display data (four digits)
0
0030
F-27
Contents of data
-
255 (Standard setting: 30)
29) Setting of velocity control phase compensation I at orientation:
LOW gear
(CTH = 0)
Mode number
Display data (four digits)
0030
F-28
Contents of data
0
-
255 (Standard setting: 30)
30) Velocity detection offset
Mode number
Display data (four digits)
F-29
Explanation:
Contents of data
0 - 255 (Adjustment at
Shipping: about 128)
0128
Adjust it so that check terminal "TS3" is 0 mV, with the motor
stopped.
31) Adjustment of revolution number display
Mode number
Display data (four digits)
F-30
Explanation:
Contents of data
-
8191 (Adjustment at
0
Shipping: about 3990)
3990
It is setting for adjustment of display of motor revolution
Make the setting smaller when more number is
number.
displayed than actual number of motor revolution.
32) Setting of rigid tap mode
Mode number
F-31
Display data (four digits)
Contents of data
0-1 (Standard setting:
0000
0)
Data
Explanation:
Torque limit signal (TLML) is used the same
as for conventional type torque limit.
0
Torque limit signal (TLML) is used for
improvement of response characteristics
such as digit tapping function as
a switch for motor voltage
1
....
33) Setting of motor voltage at normal operation
Mode number
F-32
Display data (four digits)
0010
Contents of data
0
-
95
-
100 (Standard setting: 10)
34) Setting of motor voltage at orientation
Display data (four digits)
Mode number
F-33
Contents of data
0010
0
-
100(Standard setting: 10)
35) Setting of motor voltage at rigid tap mode
Display data (four digits)
Mode number
0100
F-34
Explanation:
Contents of data
0
-
100(Standard setting: 100)
This setting is effective when the set data of mode F-31 is
1!
II
36) Setting of speed zero signal (SST) detection level
Display data (four digits)
Mode number
0075
F-35
Explanation:
Contents of data
0
-
255 (Standard setting: 75)
It is setting for speed zero signal (SST) detection level.
Speed zero signal is output when the number of revolution of
motor becomes less than the (Set data/ 100)% of maximum number
of revolution.
Detection level = (max. number of revolution x (setting data/100)%}
4.3 Rank at Setting
is already set at shipping for the application similar to the
conventional kind. And therefore, the setting of A in the rank below usually
needs to be confirmed or altered by machine manufacturers.
Please have your own ranking at change of application conditions (change of
rotation number and special setting)
Please be sure not to change setting values.
Parameter
.
Setting of rank A (necessary to be confirmed without fail)
Rank
Mode number
A
F-01
Setting of
use/non-use of machine ready signal
F-02
Setting of
use/non-use
F-03
Setting of override range
F-04
Setting of kind of velocity commands (analog voltage, DA
converter)
Contents
-
96
of override function
-
Setting of rank B (when rotation number is changed)
Rank
Mode number
B
F-13
Rotation number adjustment of forward rotation
F-14
Rotation number adjustment of reverse rotation
F-15
Rotation number at maximum velocity command voltage (10 V)
Contents
Setting of rank C (when special setting is made)
Rank
Mode number
C
F-16
Detection range of velocity arrival signal
F-17
Detection level of velocity detection signal
F-18
Setting of Torque limit value
F-19
Setting of
F-20
Limiting of regenerated power (adjustment of deceleration
time)
F-09
Use/non-use
F-35
Speed zero signal detection level
Contents
acceleration/deceleration
time
of motor power supply shutting off by machine
ready signal
-
97
5.
TROUBLESHOOTING AND COUNTERMEASURE
See item 3 in Chapter I for troubleshooting and countermeasure depending on the
condition of trouble when there is a trouble.
Note that the following items have been changed.
1) Name of the display lamp for power ON is changed as LED1 from PIL.
2) Fuse (AF2, AF3) have been changed as fuse resistor (FR1, FR2)
3) Alarm display of four LEDs have been replaced by Direct display (AL-OO) with
five digits and seven segments.
4) Alarm contents are as follows.
.
Alarm contents
Alarm
Alarm display
Alarm contents
output
code
AL-01
Motor is overheated.
AL-02
Velocity deviation is excessive against command
velocity because of overload, etc.
No. 2
AL-03
Fuse F7 at DC link is blown.
No. 3
AL-04
Fuse FI, F2, or F3 at AC input is blown.
No. 4
AL-06
Velocity of motor is exceeded to the maximum rated
speed. (Analog system detection)
No. 6
AL-07
Velocity of motor is exceeded to the maximum rated
speed. (Digital system detection)
No. 7
AL-08
Power supply voltage is too high.
No. 8
AL-09
Heat sink for power semiconductor is overheated.
No. 9
AL-10
Voltage of +15 V power supply is abnormally low.
No. 10
AL-11
Voltage at DC link is abnormally high.
No. 11
AL-12
Current at DC link is too much.
No. 12
AL-13
Data memories of the CPU are in abnormal condition.
No. 13
AL-16
RAM in NVRAM is in abnormal condition.
AL-17
ROM in NVRAM is in abnormal condition.
AL-18
Sum check alarm of ROM.
AL-19
Excessive alarm of U phase current detection circuit
offset
AL-20
Excessive alarm of V phase current detection circuit
offset
AL-21
Excessive alarm of velocity command circuit offset.
(Thermostat operates)
.
.
0ÿ
0\k
0A
QY
-
98
-
No. 1
Alarm
Alarm display
Alarm contents
output
code
AL-22
Excessive alarm of velocity detection circuit offset.
AL-23
Excessive alarm of ER circuit offset.
AL-14
ROM is in abnormal condition.
AL-15
Spindle selection control circuit is in abnormal
condition.
99
No. 13
6.
METHOD OF REPLACEMENT OF FUSE AND PRINTED CIRCUIT BOARD
Replace the two ROMs and NVRAM for parameter to new PCB, when change the PCB.
After changing the PCB, perform the adjustment of F29 (speed offset) and set the
adjustment data.
See item 6 in Chapter I for other contents.
7.'
SPINDLE ORIENTATION CONTROL CIRCUIT
See item 7 in Chapter I for maintenance and adjustment of spindle orientation
control circuit.
See appendix for information of other maintenance.
-
100
-
t
IV.
DIGITAL AC SPINDLE SERVO UNIT
(MODEL IS, 1.5S, 2S, 3S, 2H, 2VH)
1.
OUTLINE
This material describes the maintenance of digital AC spindle servo unit model
IS, 1.5S, 2S , 3S, 2H, and 2VH.
1.1 Configuration
A digital AC spindle servo unit is composed of unit part, PCB part, and ROM.
Name
Model 1
8000 RPM
Specification
Unit
specification
PCB speci¬
fication
A06B-6059-H001#H501 A06B-6059-H001 A16B-1100
ROM
Drawing number Type
A06B-6059-H501 9801
-0200
+
Model 1.5S A06B-6059-H002//H508 A06B-6059-H002
8000 RPM
A16B-1100
-0240
A06B-6059-H508 9808
Model 2S
8000 RPM
A06B-6059-H002#H502 A06B-6059-H002
A06B-6059-H502 9802
Model 3S
6000 RPM
A06B-6059-H003//H503 A06B-6059-H003
A06B-6059-H503 9803
Model 2H
15000 RPM
A06B-6059-H002//H505 A06B-6059-H002
A06B-6059-H505 9805
Model 2VH
20000 RPM
AO6B-6O59-HOO30H5O7 A06B-6059-H003
A06B-6059-H507 9807
103
2.
DAILY MAINTENANCE AND MAINTENANCE TOOL
Refer to item 2 in Chapter I in this manual.
3.
INSTALLATION
The interface is the same as before. Relating to the installing procedures,
power supply line connection and AC spindle motor connection, refer to the item
4 in Chapter I in this manual.
104
4.
SETTING
The setting on the unit is the same as conventional digital AC SPINDLE SERVO
UNIT (MODEL 3-22).
4.1 Parameter Setting Method
4.2 Number and Content of Parameter
4.3 Setting Rank
4.4 Setting Method of Short Pin
4.5 Adjustment Method of Variable Resistor
4.1 Parameter Setting Method
The setting switch and the display part are arranged on the PCB like the figure
below.
As shown on the following pages, the setting in the respective modes can be
checked and changed by manipulating this switch.
Display part
88888
Setting switch
Sy
MODE U P
m
\TAlD0WN
o
1) To confirm the current mode
a) The speed is usually displayed at the display part (Five digits).
The
The current mode number can be displayed when "MODE" is turned on.
mode number is displayed as two digits of "F-XX".
2) To confirm the setting data
a) Select the mode of data to be checked (parameter) in the following manner.
b) Continuously turn 4 switches "MODE", "+ UP", " + DOWN" and "DATA SET" ON at
the same time for more than one second.
c) The display part changes from the blank to "FFFFF".
d) Turned off all switches.
e) The current mode is displayed when "MODE" is turned on.
f) When "+ UP" is turned ON with "MODE" ON, the mode is incremented by 1
(F01 - F02)
g) When "t UP" is continuously ON with "MODE" ON, the mode increases
continuously (F35 - F34)
h) When "+ DOWN" is turned ON with "MODE" ON, the mode is decremented by 1.
i) When "+ DOWN" is continuously ON with "MODE" ON, the mode decrements
continuously
j) With "MODE" OFF, the data is displayed (4 digits) in approx. 0.5 second.
k) Approx. 10 seconds after the data display is selected, the speed rpm
display is selected. When all switches are turned OFF in any mode, the
speed rpm is finally displayed.
.
.
.
105
3) To alter the data
a) Select the mode (parameter) to be changed according to the steps 2)-b) to
2)-i).
b) Turn "MODE" OFF: The data is displayed in approx. 0.5 second.
c) Turn "+ UP" ON: The data is incremented by 1.
d) Turn " + UP" ON continuously: The data is incremented continuously.
e) Turn " + DOWN" ON: The data is decremented by 1.
f) Turn " + DOWN" ON continuously: The data is decremented continuously.
g) The motor is controlled by using the displayed data.
h) When replacing the data with the modified data, keep turning "DATA SET" ON
for one second or more.
i) The display part changes from the blank to "88888" and modification of the
data completes.
j) When changing the data once again, follow the steps from 3)-a) above.
k) The speed is indicated automatically after about 10 sec.
4.2 Number and Content of Parameter
1) Motor speed indication
Mode number
Display data
(Five digits)
F-00
Contents of data
The speed of the motor is displayed.
(rpm)
2)
Use/no
use of the machine ready signal (MRDY)
Mode number
Display data
(Five digits)
F-01
0001
Explanation:
Contents of data
0, 1 (Standard setting:
0)
If the machine ready signal (MRDY) is used
If the machine ready signal (MRDY) is not used:
1
0
3) Output limit pattern setting
Mode number
Display data
(Four digits)
F-06
0000
Explanation:
Contents of data
0 to 6 (Standard setting:
0)
This function is not available for a conventional type.
In the following cases, please select a pattern which is
appropriate respectively.
A. When the output is limited only at acceleration and
deceleration, the motor accelerates and decelerates slowly,
and operates at the rated output during steady rotation
(Setting data: 1 or 4) (function similar to soft start and
stop)
B. When the motor
accelerates and decelerates at the maximum
the
rated output
rotation (Setting data:
and
106
output
2 or 5)
-
is
limited
during
steady
C. When the same motor and amplifier are used to operate the
machine as a different output specification machine (Setting
data: 3 or 6)
Setting data
Content
Item
Pattern 1
Patter 2
The output is not limited.
0
0
A
Output is limited only at
acceleration and deceleration.
1
4
B
No output is limited at accelera¬
tion and deceleration but it is
2
5
3
6
limited during steady rotation.
C
The output is limited over all
movements
.
(Output limit pattern 1):
The setting data = 1, 2, 3
Output
Catalog description
value
Pm
100%
Pout
_ [ F-07 ]
100
x Pm
0
Nm
Nb
Speed
(Output limit pattern 2) :
Output
The setting data =4, 5, 6
Catalog description
value
Pm
n 100%
Pout
0
Nm
Nb
Speed
107
_
[F-07]
x Pm
100
4) Limit value setting when the output is limited
Mode number
Display data
(Four digits)
F-07
0100
Explanation:
Contents of data
0 to 100 (Standard setting:
100)
With the maximum rated output (overload capacity) as 100%, set
the limit value to a value to be limited. This preset value is
available when the output is limited according to mode F-06
setting.
Output limit value = Maximum rated output x (setting data) %
5) Delay time to motor power interception
Mode number
Display data
(Four digits)
F-08
0005
Explanation:
6)
Use/no
Contents of data
0 to 255 (Standard setting:
5)
The delay time from 0 speed signal detection to the motor power
interception is set.
Delay time = (Setting data) x 40 msec
use of the motor power interception by the machine ready signal (MRDY)
Mode number
Display data
(Four digits)
F-09
0000
Explanation:
Contents of data
0, 1 (Standard setting:
0)
function is
The
used
when it
is
that
the
presumed
electromagnetic contactor is switched frequently.
When the
machine ready signal (MRDY) is turned OFF, only motor power is
interrupted, and the electromagnetic contactor remains ON.
1
If this function is used
If this function is not used: 0
7) Adjustment of speed error offset at the time of the forward rotation command
(SFR)
Mode number
Display data
(Four digits)
F-10
0128
Explanation:
Contents of data
0
-
255 (Standard setting:
128)
The speed error offset is adjusted when stopping motor
operation with the forward rotation command (SFR) and speed
command voltage 0 V (zero rotation command) applied. Increase
the data when stopping the motor rotating counterclockwise
(CCW) , as viewed from the shaft.
108
8) Adjustment of speed error offset at the time of the reverse rotation command
(SRV)
Mode number
Display data
(Four digits)
F— 11
0128
Explanation:
9) Adjustment of
(ORCM)
0
-
255 (Standard setting:
128)
The speed error offset is adjusted when stopping motor
operation with the reverse rotation command (SRV) and speed
command voltage 0 V (zero rotation command) applied. Increase
the data when stopping the motor rotating CCW, as viewed from
the shaft.
the
speed error offset at
Mode number
Display data
(Four digits)
F-12
0128
Explanation:
Contents of data
time of
the orientation command
Contents of data
0
-
255 (Standard setting:
128)
The parameter is used for adjustment when no adjustment is
possible so that the LED of IN-POSITION FINE lights up at
orientation, using the adjusting volume control on the
orientation circuit.
10) F13 and F14 are not used.
Please refer to item 4.5 for speed adjustment.
11) Speed adjustment when velocity command voltage is 10 V
Mode number
Display data
(Four digits)
Contents of data
0
F-15
-
Rated speed (It is decided by motor
specification)
Explanation:
When making velocity adjustments in para. 14) and 15) below, be
Set the value of Speed rpm at
sure to complete this setting.
10 V velocity command voltage/ 100.
Speed rpm at 10 V velocity command voltage =
(Setting data) x 100
12) Detection range of speed arrival signal (SAR)
Mode number
Display data
(Four digits)
F-16
0015
Explanation:
Contents of data
0
-
100 (Standard setting:
15)
The detection range of the speed arrival signal (SAR) is set.
The speed arrival signal (SAR) is outputted when the motor
speed reaches within + (Setting data) % of the command speed.
Detection range = Command speed x + (Setting data) /
109
13) Detection range of speed detecting signal (SDT)
Mode number
Display data
(Four digits)
F-17
0003
Contents of data
0
-
100 (Standard setting:
3)
The detection range of the speed detecting signal (SDT) is set.
The speed detecting signal (SDT) is outputted when the motor
speed becomes (Setting data) % of a maximum speed or less.
Detection range = Maximum speed x (Setting data) %
Explanation:
14) Setting of torque limit value
Mode number
Display data
(Four digits)
F-18
0050
0
-
100 (Standard setting:
50)
Torque limit value when the torque limit signal (TLMH) is
turned ON is set.
Torque limit value = Maximum ratings torque x (Setting data) %
Explanation:
15) Setting of
Contents of data
acceleration/deceleration
Mode number
Display data
(Four digits)
F-19
0010
Explanation:
time
Contents of data
0
-
255 (Standard setting:
10)
Set this time when the acceleration time between the stop and
the maximum speed rpm is longer than 5 seconds.
Preset time = Acceleration time (sec) x 2
16) Limit of regenerative power (Adjustment of deceleration time)
Mode number
Display data
(Four digits)
F-20
0060
Explanation:
Contents of data
0
-
100 (Standard setting:
60)
The deceleration time is adjusted to become the same as the
acceleration time.
The deceleration time shortens when the setting is enlarged.
The deceleration time lengthens when the setting is reduced.
However, when the regenerative power is excessive,
the
regenerative limit circuit is actuated and the motor current
waveform changes; therefore, abnormal noise may be produced
In this case,
from the motor.
this abnormal noise is
suppressed by reducing the setting.
110
17) Setting of velocity control phase compensation P:HIGH gear (CTH = 1)
Mode number
F-21
Display data
(Four digits) 0020
Contents of data
0
-
255 (Standard setting:
20)
18) Setting of velocity control phase compensation P:L0W gear (CTH = 0)
Mode number
Display data
(Four digits)
F-22
0020
Contents of data
0
-
255 (Standard setting:
20)
19) Setting of velocity control phase compensation P in orientation time:
gear (CTH = 1)
Mode number
Display data
(Four digits)
F-23
0040
Contents of data
0
-
40)
255 (Standard setting:
20) Setting of velocity control phase compensation P in orientation
gear (CTH = 0)
Mode number
Display data
(Four digits)
F-24
0040
HIGH
time:
LOW
Contents of data
0
-
40)
255 (Standard setting:
21) Setting of velocity control phase compensation I:HIGH gear (CTH = 1)
Mode number
Display data
(Four digits)
F-25
0010
Contents of data
0
-
255 (Standard setting:
10)
22) Setting of velocity control phase compensation I:LOW gear (CTH = 0)
Mode number
Display data
(Four digits)
F-26
0010
Contents of data
0
-
255 (Standard setting:
10)
23) Setting of velocity control phase compensation I in orientation time:
gear (CTH = 1)
Mode number
Display data
(Four digits)
F-27
0010
Contents of data
0
-
255 (Standard setting:
111
10)
HIGH
24) Setting of velocity control phase compensation I in orientation
time :
LOW
gear (CTH = 0)
Mode number
Display data
(Four digits)
F-28
0010
25) F-29 is not used.
Contents of data
0
-
255 (Standard setting:
Please refer to item 4.5 for the speed
10)
detection
offset
adjustment.
26) F-30 is not used.
27) Setting of rigid tap mode
Mode number
Display data
(Four digits)
F-31
0000
Explanation:
Contents of data
0-1 (Standard setting:
0)
The torque limit signal (TLML) is used to a conventional torque
limit: 0
The torque limit signal (TLML) is used for motor voltage
switching when improved transient response characteristics are
required for rigid tapping operation, for example: 1
28) Setting of motor voltage when usually operated
Mode number
Display data
(Four digits)
F-32
0010
Contents of data
0
-
100 (Standard setting:
10)
29) Setting of motor voltage in orientation time
Mode number
Display data
(Four digits)
F-33
0010
Contents of data
0
-
100 (Standard setting:
10)
30) Setting of motor voltage in rigid tap mode
Mode number
Display data
(Four digits)
F-34
0100
Explanation:
Contents of data
0
-
100 (Standard setting:
100)
This preset value is effective when mode F-31 setting data is
1.
112
31) Detection range of 0 speed signals (SST)
Mode number
Display data
(Four digits)
F-35
0075
Explanation:
Contents of data
0
-
255 (Standard setting:
75)
The detection range of 0 speed signals (SST) is set.
0 speed signal (SST) is outputted when the speed of the motor
becomes (The setting data/100)% of a maximum speed or less.
The detection range = maximum speed x (The setting data/100)%
32) Detection range of load detection signal (LDT)
•
Mode number
Display data
(Four digits)
F-36
0090
Explanation:
Contents of data
0
-
100 (Standard setting:
90)
This function transmits a load detection signal when the motor
output exceeds the preset value % of the maximum output (120%
of 30-minute rating)
.
4.3 Setting Rank
For the usual applications, the parameter is factory preset before shipment;
therefore, the machine tool builder should normally check or modify only the
rank A setting.
When changing the operating conditions (change of speed rpm and special
setting),- the machine tool builder should divide the rank for use.
Please pay attention not to alter the setting value by mistake.
Setting of rank A (It must be confirmed without fail)
Rank
Mode number
A
F-01
Content
Setting of the
use/no
use of the machine ready signal
Setting of rank B (special setting)
Rank
Mode number
B
F-16
Detection range of speed arrival signal
F-17
Detection level of speed detecting signal
F-35
Detection level of 0 speed signal
F-18
Setting of torque limit value
F-06 , 07
F-19
Content
Setting of output limit
Setting of acceleration and deceleration time
113
Rank
Mode number
Content
g
F-20
Limit of regenerative power (Adjustment of deceleration
time)
F-09
Setting of the use/no use of the interception of the motor
power by the machine ready signal
F-36
Setting of load detection level
4.4 Setting Method of Short Pin
Name
SI
S2
S3
Control circuit mode
changeover
The setting is as shown on
the right, depending on the
speed rpm during the rating
command (VCMD = 10 V)
-
-
S4
S5
Setting
before
shipment
Setting pin status
Contents
Test mode
TEST
Normal operation mode
DRIVE
Detector I Detector II
Setting for gain switching
»
Setting
6000RPM
D
8000RPM
C
6000RPM
10000RPM
12000RPM
B
8000RPM
10000RPM
15000RPM
20000RPM
A
450RPM
Detector I. Gear
256 teeth
Detector II. Gear
128 teeth
Normal operation mode
OFF
For gain switching
ON
114
DRIVE
according
to each
model
OFF
4.5 Adjustment Method of Variable Resistor
Name
RVl
Adjustment before shipment
Contents
Adjustment for each model
Maximum speed adjustment in CWW
direction
RV2
Maximum speed adjustment in CW
direction
RV3
Offset adjustment of velocity detecting
circuit
Adjustment to 0 mV +1 mV, using
TS3 with rotation command OFF.
RV4
+5 V voltage adjustment
Adjustment to +5 V +0.1 V.
RV5
Gain adjustment when the gain is
switched
50%
RV6
Gain adjustment of velocity
detecting circuit for low
speeds
Apply VCMD (velocity
command voltage) 25 mV
+2 mV to adjust the speed
rpm for each model
Model
Adjusted value
Maximum speed
1.5S, 3S,
6S
15+3 rpm
6000 rpm
IS, 2S, 3
20+4 rpm
8000 rpm
2H
37.5 +8 rpm
15000 rpm
2VH
50 +10 rpm
20000 rpm
115
5.
TROUBLESHOOTING AND COUNTERMEASURE
When faults take place, refer to item 3 in Chapter I in this manual according to
trouble conditions, and locate the cause and take proper corrective measures.
At that time, it should be noted that the following item are modified.
1) Change from alarm display using 4 LED's to Alarm No. direct display (AL-XX)
using 5-digit segments.
2) To reset the alarm, turn "MODE" and "DATA SET" ON at the same time.
3) The alarm contents are as shown in the table below.
Content of alarm
Alarm display
Content of alarm
AL-01
The motor or servo unit becomes overheating.
(Thermostat action)
AL-02
The speed deviates substantially from the speed command due to
overload, for example, producing excessive speed error.
AL-03
The electric discharge circuit part is abnormal.
AL-04 to 05
(not used)
AL-06
The speed of the motor exceeds maximum ratings.
(Analog method detection)
AL-07
The speed of the motor exceeds maximum ratings.
(Digital method detection)
AL-08
The power supply voltage is too high.
(not used)
AL-09
AL-10
The voltage of power supply (+15 V) abnormally decreases.
AL-11
The voltage of DC link part is rising abnormally.
AL-12
'
AL-13 to 15
AL-16 to 23
The current of DC link part flows excessively.
(not used)
An arithmetic circuit and a peripheral circuit part are
abnormal.
No display
Abnormality is generated in ROM.
116
-
6.
REPLACEMENT METHOD OF FUSE AND PCB
When replacing PCB, re-mount 2 ROM's and NV RAM (parameter memory element) on a
For other settings and speed rpm adjustment, for example, do this as
needed. For others, refer to item 6 in Chapter I in this manual.
new PCB.
7.
SPINDLE ORIENTATION CONTROL CIRCUIT
Refer to item 7 in Chapter I in this manual for the maintenance of the spindle
orientation control circuit and the adjustment.
Please refer to the appendix for other maintenance.
117
APPENDIXES
*ÿ
APPENDIX 1 CONNECTION DIAGRAMS
Fig.
Fig.
Fig.
Fig.
Fig.
1
1
1
1
1
(a)
(b)
(c)
(d)
(e)
Fig. 1 (f)
Fig. 1 (g)
Fig. 1 (h)
Fig. 1 (i)
Fig. 1 (j)
Connection
Connection
Connection
Connection
Connection
diagram of MODEL 1/2/small MODEL 3
diagram of MODEL 3 'v 22
diagram of MODEL 30, 40
diagram of AC spindle servo unit (380V/415VAC input)
diagram of spindle orientation (with position coder
employed)
Detailed connection diagram of spindle orientation with position
coder employed (when the synchronous feed is combined with a turning
machine, machining center, etc.)
Detailed connection diagram of spindle orientation using position
coder (when the spindle orientation only is used with the machining
center)
Detailed connection diagram of spindle orientation using position
coder (when the stop position is externally set)
Connection diagram of spindle orientation (when magnetic sensor is
used)
Detailed connection diagram of spindle orientation using magnetic
sensor)
121
AC spindle servo unit
CNl
K5
MR5 0LFH
Magnetics
cabinet
control
panel
a
CN3
K6
MR2 OLMH
Q[
K7
SMI
LMl
Crimp style
terminal
(T 1 3>
—
No-fuse,
breaker
AC
power
I
N3
NJ
I
3 phase—
24
ov
4 8 0V
s
_Z.
G
.(*)
i
T1.
R
1
O O-K
I
iPower
I
(transformer!
o o
9(option) 6
S
*
K1
T
I
9
?
I
L-
9
O O-H
I
1
T
G
Crimp style
terminal
I
I
J
i
I
I
L_ÿ
33
j
I Fuse (5A) or
1
SARI
R0 1
37
2
SAR2
R02
TT
T
1B
R0 3 ARST1 SST 1
TtT
R0 4
37
R05
3H
TB OM,
CN2
CNl
20
T
ARST2 SST2
21
£
22
6
R08
_J 1
RO 9
•1 2
T
CTM MRDY2
2T
25
9
ORCM1 TLM5
26
10
RIO ORCM2 TLM6
1I
JJV
22.
Ri
OVRl A LMl
12
3 j ZB
R 1 2 OVR2 ALM2
4 5'
HE 13
SFR + 1 5 V OR
46
3
(J
SRV DAI
31
47
ESP 1 DA2
4B
32
E
ESP2
n
OS
M
ov
9
OH 2
IT
in
PB
TT
D
4
T1
K4
MR-20LFH
G
G
U
U
11
V
5
1_9
20
SS
a
i?
1H
K2
+5V
><
\v
T1
OM TB
2 SMI (screw
terminal
3 LMl
M3)
20 3ÿ
13
COM
7
18,
5
19
6
R
S
T
G
Crimp style
terminal
Power
Y
JL line
U
V
Tw
6
5
RB
RA
4
OV
9
8
SS
OH 1
OH2
,
Z
Pin
350690-
7
V ,X
W,Y
V
w
U
Fan motor
cable
a
Housing
350782-1
G
G
Screw
terminal M6
FMA FMB
FMA
FMB
Screw
AC
Spindle motor
terminal
M4
V
VV
11
17
ALB
AL4
3
SDT 2
15
AL2
2
49
LL
LMl
IHI
SMI
CTH
JH
OM
14
ALl
1
To
TV
OHI
11
RB
16
15
SDT 1
CN2
z
TLMH TLMH
R06 ORAR1 OT
T
39
23
RO 7 ORAR2 MRDY1
Ttr
TT
PA
In
RA
Connector
housing
AC spindle motor
350720- 1
Socket
connector
350609-1 Signcl
3
2
1
+5 V
PD
PA
4
I0
CN3
y
¥
T2
a
T2-I
K8
2
T 3— 1
2
Crimp style
terminal
Crimp style
terminal
Resistance unit
15H
Standard ( lkW )
-(j) Thermostat wive
()
j No-fusc breaker
K3
K9
To magnetic cabinet control panel
Table 1 (a) Connection diagram of MODEL 1/2/small MODEL 3
AC spindle servo unit
CN1
CN1
K5
MR50LFH
Magnetic
cabinet
a
CN3
control
panel
K6
MP2 0LMH
a
OM
K7
SMI
Crimp style lLMl
terminal
CT1—3)
ro
I
R
3-phase
T
1
i
£
1
I
6Power
I
o
transformeri
24 0V _s
Cj)(option) -Cj)
\
T
4 8 0V
G
6
*
i
O O
R
I
SARI
PA
0V
2
OH2
3 -i
R0 2
3 :>
R03
36
R0 4
37
R0 5
3H
2
SAR2
3
III
ARST1 SSTl
20
4
ARST2 SST2
5
21
6
R06
OT
23
23
7
RO 7 ORAR2 MRDY1
o
21
K1
(
J
T
G
17
RB
26
10
28
12
OVR2 ALM2
29
+1 5 V
n
+5 V
20
SS
13
OR
30
1 -t
DAI
OS
15.
SDT1
u
r,
V
1 OM
W
K2
7
\V
G
2
1
PA
+5V
6
5
4
RB
RA
OV
9
8
7
OH2
SS
OH 1
,Z
U
,Y
w
W
V ,X
U
V
n
2 SMI terminal
Screw
LMI M3)
terminal
M5
U
20 X 7
13
V
G
19 COM
T1
W
12
3
18
5
G
4
FMA
FMB
1 1
17
ALB
DA2
16
AL4
32
16
E
SDT2
15
II
14
AL2
8
AL1
10
Fuse holder
2
FMW
R
1
FMV
—
G
G
terminal M6
FMA
a
K3
FMB
Note 1
FMA FMB
FMA FMB
Screw
terminal
M4
AC
Spindle motor
FMU
K3
FMV
FMU FMV FMW
FMU FMV FMW
Note 2
FMW
Screw terminal
M4
S
CN3
G terminal is earthed
(screw terminal M6)
FMU
B
3
9
FMB
Housing
350782-1
Pin
3 50 6 90 1
Screw
terminal
TB
(screw-
48
OM
U
V
3
PD
Crimp style
ESP 1
18
a
G
ESP2
CTH
connector
MR-20LFH
a
i -j
19
AC spindle motor
Socket
K4
11
ai
LMl
a0
SMI
]D
OH 1
4
18
47
49
Crimp style
To
PB
Connector
housing
350720-1
350689- 1
CN2
3
8
R08 CTM MRDY2
25
TT
9
ROD ORCM1 TLM5
SFR
ASi
SRV
15
RA
1B
TLMH TLML
22
ORAR1
45
S
terminal
J
R0 1
R12
6—i-cTo-h
l
l
4
breaker
AC power
1 .1
R1 0 ORCM2 TLM6
•1 3
11
27
R1 1 OVR 1 A LMl
No-fuse ,
UJ
1
42
I
CN2
33
to
T
G
cabinet
Fig. 1 (b) Connection diagram of MODEL 3~22
Note 1) In case Model 3 to 15
Note 2) In case Model 18/22
AC spindle servo unit
panel
PA
G
2
IS
SAR2
RA
OM
K7
SMI
TBl LMl
Crimp style
terminal
I
R
3-phase
2 4 0V
S
f
9 Power
6
I
Q (option) Q
O Of
i
4 80V
G
6I
I
l
I
R
o
1 transform !
O OiL
.1
R0 3
36
R0 4
s
K1
37
R05
19
3
ARST1 SST1
25
4
21
5
ARST2 SST2
0RAR1
OT
39
23
7
22
6
R 07 0RAR2 MRDYl
•1 0
ROB
33
24
T
G
Crimp style
terminal
ia
in
PB
17
25
15V
+30
47
31
DAI
ESP 1 DA2
ia
u
u
G
—
V
is
+ 5V
20
7
V
HONDA V
MR-20RM1 W
SS
8
Crimp style
terminal
OR
14
OS
X
7
19 COM
6
13
12
5
18
11
17
ALB
1G
AL1
4
10
15
SDT 1
HONDA
MR-201
Screw, terminal
20
K2
Gj
1 OM TB
(screw
2 SMI
terminal
3 LMl M3)
3
9
T6
E
SDT 2
15
AL2
49
17
LMl
CTH
18
OM
14
OC
AL1
2
8
CN3
1
SUCN
MIO
U
FMU
FMV
K3
FMW
V
connector
:
5
12
19
K4
TB
11
RB
AC spindle motor
35 OG09- 1
MR-20LFH
4
32
50
D
OH 1
CTM MRDY2
SFR
8
SRV
SMI
OH 2
HOND.
MR-50RM CN2
8
26
I0
•1.2.
RIO ORCM2 TLMG
43
21
11
R1 1 OVR 1 A LMl
44
28
12
R 1 2 OVR2 ALM2
5
13
29
ESP 2
z
n
TLMH TLML
38
RO 6
RO 9 ORCMl TLM5
(Tl-3)
I
35
Q[
MR20LMH
AC power
0V
SARI
CN3
No-fusebreaker
1
1
34
R0 2
50LFH
KG
14
ROI
MR-
Connector
Housing
350720-1
Socket
CN2
i
CNl
K5
Magnetic
cabinet
control
aa
CNl
/J!
lG
3
2
1
PB
PA
•f 5V
G
5
RB
RA
B
SS
4
OV
9
OH 2
W,Y
G
V
W
G
Screw ter¬
minal M10
FMU
FMU FMV FMW
FMV
FMU FMV FMW
FMW
K10
AC
Screw
Spindle motor
terminal M4
Fan unit
or
n
FMB
Fuse holder
R
S
T
Fig. 1 (c) Connection diagram of MODEL 30, 40
OH 1
V ,X
Gl.GS
FMV
FMW
350690- 1
7
U
Screw terminal M4
™JlT2 |FMA
350782- 1
Pin
U ,Z
T1
W
Housing
Fan motor
AC spindle servo unit
CN1
a
CN1
K5
MR5 0LFH
Magnetic
cabinet
control
panel
CN3
K6
MR20LMH
Q[
OM
SMI
K7
TB LM1
Crimp style
terminal •
I
I
No-fusebreaker
AC power
2 4 0V
\
T
4 80V
G
1 -phase
200V
s
220A
220B
R
S'
I
S
L
O
Of
O
o-w
*
Kl
16
19
R0 3 ARSTl
36
20.
R04 ARST2
37
21
R0 5 TLMH
38
22
R06 ORAR1
39
23
R 07 ORAR2
•1 Q
ROB
41
R0 9
24
SSTl
17
RB
l8
6
OT
7
MRDY1
25
9
28
1 2
20
13
DAI
OR
11
OS
47
31
ia
30
48
32
16
G
E
SDT2
220B
OH 2
D
3
in
OH 1
4
4-5V
TB
u
u
—
MR-20RMI
V
7
HONDA y
9
SDT1
17
CTH
LM1
5Q
SMI
18
OM
K2
G
Crimp style
2 SMI
(screw
>C
terminal
M3)
HONDA
MR- 201
7
U
19 COM
12
6
V
W
18
5
G1.G5
11
4
3
2
14 AL1
1
OC
SOCN
CN3
FMU
FMV
Screw terminal
Ml 0
13
1 7 ALB
jo
16 AL4
9
15 AL2
8
\v
to
3
2
1
PB
PA
+5V
6
5
RB
9
RA
8
4
OV
7
OH 2
ss
OHl
Housing
350782- 1
Pin
350690- 1
U,Z
V ,X
W,V
G
U
V
W
G
Screw ter¬
minal M 10
terminal
TB
3 LM1
20
V
W
SS
1 OM
:
6
13
20
K4
motor
connector
5
12
19
AC spindle
350689- 1
MR-20LFH
8
+15V
220B
9
Socket
HOND.
MR-50RM CN2
CTM MRDY2
45
220A
0V
2
TLML
ESP2
Crimp
terminal
220A
i
PB
4
SFR
46
SRV
4
I
PA
5
ESP 1 DA2
Crimp style
terminal
14
SST2
T
I
.1
RA
3
ai
O O-K
3-phase
IS
SAR2
35
Rl 2 OVR 2 ALM2
1
R
34
9
ORCM1 TLM5
10
26
42
R10 ORCM2 TLM6
27
11
43
R1 1 OVR 1 ALM1
(Tl-3)
N?
Ui
ROI
l
SARI
R0 2
Connector
Housing
350720-1
CN2
33
K3
FMU FMV FMW
FMV
FMU FMV FMW
Screw
FMW
FMW
terminal M4
T1
Screw terminal M4
FMU T2
FMV
FMW
FMB
IFMA
K10
mm
Fuse holder
R
S
T2
FMU
T
G1 is connected with G2
on the terminal board T1
220V
Fig. 1 (d) Connection diagram of AC spindle servo unit (380V/415V AC input)
u
Fan unit
or
Fan motor
AC
Spindle motor
MR-50RMA
(*Nl\
NC or magnetic
sequence control
Spindle servo unit
CN 1
5n
I9
I7
48
\
K.5
32
n
7
18
MR-5 0LFII
45
16
LM1 BSP 2 ES P 1 SR V SFR
SMI
30
DA 2
l)A 1
15
1 fi
13
12
11
•1 0
39
38
37
3 fi
35
34
33
R11
Rl 0
RO 9
RO 8
RO 7
RO 6
R05
R04
RO 3
R02
RO 1
29
31
CTM SDT2 S DT 1
OM
II
Rl 2
f- l 5
14
13
12
OS
OR
A LM 2
MR 20LMH
To magnetic
sequence
control
To NC
I
CNC
K8
]r
CN A, CNn
25
24
23
20
21
22
19
11
09
10
08
07
06
ALM2 TIM6 TIM5 V1RDY2 MRDY 1
OT
04
05
03
02
01
TLML SST 2 S ST 1 SAR2 SARI
]
19
18
OO
tPB
PD
13
12
MR-20LFH
CN A
CNC Orientation control circuit
20
f
l 2N
06
17
16
15
14
14
15
16
1 7
18
19
20
PA
PA
*SC
SC
OL
H1 2
HI 1
H1 0
HO 9
HO 8
HO 7
*
(
05
+ 511 + 511
10
09
08
NZX
i IB
HA
1
NZZ
07
to
2 fi
CN 9
CNR
J4
27
28
V OVR 1 OVR1 ORCM2 ORCM1 CTM ORAR2 ORAR1 TLMH ARST2 ARST1
08
04
03
02
01
+-5H
OH
OH
OH
01
09
10
11
13
12
02
03
04
05
06
07
HOG
1105
HO 4
HO 3
HO 2
HO 1
J
I
MR - 2 ORMA ( CNA , D )
£
Machine tool side
To manual pulse generator
Gear or belt
Spindle
motor
i
To proximity switch for
near zero point
i
i
Position coder
Note 1) Signal cable K8 applies to spindle orientation B, BS.
Note 2) Cable J4 is used when the lathe position coder or the
synchronous feed position coder for machining center
is used concurrently.
Fig. 1 (e)
Connection diagram of spindle orientation (with position coder employed)
\
Tool
Spindle
i
i
Directly coupled or timing belt
I
| CN A |
Orientation control
circuit A/D, AS/DS
1
IHLiiiA
=6 5
o
(09)
+5 V
I Open I
HB
-6-
(01)(02)(03)1 OM
T
•
(04)(05 )( 0 6
T0
1
4
+5V
g 511
OL
DO
=D 6
IP
O
Manual pulse
generator
A + 511 — -
l
2N
J
+5V power is supplied
from NC
Proximity switch for near zero
point
(10)
To NC via connector
O NZX
CNB
(ID
NZZ
2:
— ‘1
--1
Ct=—I
1-Wr-Q-
I
9
107)
| Open
i
| ioo
o ov
==ÿ
<S
(20)
+12N
oo
-f
IT
1) When manual pulse generator
and proximity switch for near
zero point arc not used, HA
—
HD, NZX, NZZ and +12N
need not be connected.
(Note 2)
Shield grounding
AS/DS type applies to
model 1/2/small model 3.
-=$ MOV
)
i
ll( I 5 V )
4,000 rpm
6,000 rpm
position coder
signal input
i
(16)
PA
(17)
<f
(1ÿ—
<J)
(19)
(14)
(15)
O
PA
i
1
A ( PA )
-6 N ( PA )
*
PB
c( PU)
Position coder
*
4—
PB
K(
* PU )
SC
A
B( SC)
*SC
A
P(*so
Fig. 1 (f) Detailed connection diagram of spindle orientation with position coder employed
(when synchronous feed is combined with turning machine and machining centers etc)
127
Orientation control circuit
+5 V
+SV is supplied by
spindle servo unit
[+5 V
Q
5H
I
(®
CNA
*
I
)(02)(03
(04)(05)(06
4)
( 20
OG
OV
y UH
+5H
-A
___
K ( OV)
Lower Ulan
400 mA
A
H
(+5V )
A 00
Position coder
( 16 )
A
A( PA)
(17)
-6 4=PA
N(*PA)
A
PB
C ( PB )
*PB
R ( PB )
SC
B( SC )
0 Short circuit
X
4000 rpm, 6000 rpm
position coder
signal input
( 18 )
( 19 )
(14)
(15)
A
PA
*sc
*
—
c--
,\J
P(*SC)
Note) The cable length should be shorter than 20 m between the servo unit and
the position coder.
Fig. 1 (g) Detailed connection diagram of spindle orientation using position coder
(when spindle orientation only is used for machining centers)
I
128
-
I
I
Orientation
control circuit
CNA
+5 V
(0 1 ) ( 0 2 )( 0 3 )
I
+ V
OH
K (0V)
+ 5H
H ( +5 V )
5
5H ( 0 4 )( 05)(06 )
(20)
Position coder
00
ioo
Lower than
400 mA
<p ov
4000 rpm, 6000 rpm
position coder
signal input
(
16 )
PA
—
—f-
(17)
I
(IB)
PB
(19)
A( PA )
-6
N ( *PA )
-A
C( PB )
1 *PB
R ( *PB )
i
{ 14 )
-A
SC
(15)
*SC
B ( SC )
P(*so
V
CBN is relayed or +5V power
is supplied from NC in case
of synchronous feed control.
| CNC )
( 07 )
-6-
2U
HO 2
2
(05)1 H03
4
V 04 )
8
(06)
Stop position
command signal
HO 1
Magnetic sequence
2 1 control circuit
2*
2ÿ
Converter circuit
4 096
'360°
LMlk HO 5
(
C J)
( 20 )
Q
16
H0 6
32
HO 7
64
2°
H0 8
1 28
27
l 19 )
-a
( 1
A
H0 9
2 56
(17)1
HI 0
512
H
)
V
23
204 8
-18 0“
1 024
- 9 0“
5I2
-4 5°
34 1
”30°
i
(16)1 HI 1
1024
HI 2
2048
2*
2®
2 io
2"
l 1 4 ) 1 OL
?
Stop position command
Fig. 1 (h) Detailed connection diagram of spindle orientation using position coder
(when the stop position is externally set)
129
Spindle servo unit
MR- 5 0 KM A
CN
NC or magnetic
sequence control
<s>
MR-50LFH
50
49
VSM1
I.M 1
i
\
47
48
46
45
44
43
'12
4l
40
39
38
37
36
35
34
33
SFR
SFH
R 11
HI 0
R09
R08
R0 7
R0 6
R05
R04
R0 3
R0 2
R0 1..
i
ESP2 BSP1 SRV
31
32
17
18
(Til
OM
15
16
29
DA 2 DAI
E
/
30
SDT2 S l)T 1
4 1 5V
14
13
OS
OR
26
27
28
25
23
21
21
19
20
22
OVR 2 OVH1 ORCM2 ORCM1 CTM ORAK2 ORAR 1 TLNH AKST2 ARST1
12
10
11
09
08
07
ALM2 A LM 1 TLM6 TLM5 MRDY2 MR1)Y1
06
OT
05
03
04
TI,ML SST2
02
01
SST 1 SAR2 SARI
CN9
4
r
Orientation control circuit
i
MR- 20RMA
CNA
I
LO
O
I
MR
\
/
19
20
ov + 1 5V
OO
13
07
17
18
12
06
10
04
14
15
LSB LS A MSB
I1
05
16
03
MSA
08
09
02
01
i
2 0 LFH
_I
Machine tool side
3 Gear or belt
Spindle
motor
i
=
t
Tool
i
Magnetizing element
<E>
Fig. 1 (i)
[Spindle
Metal plug socket
Q
Amplifier
Connection diagram of spindle orientation (when magnetic sensor is used)
Magnetic sensor
t
Orientation control circuit
Metal connector
| CN A |
I
U 4)
IIS
as
MSA
A
-0 MSB
L>
-A LS A
15-A
LS B
•fR
J20
(Note)
OG
F Magnetic sensor
amplifier
1
ifi_ + 1 5 V
1?_A ov
—
-p*
R
A
ET
c
B
The cable length should be shorter than 20m between the servo unit and the magnetic
sensor amplifier.
Fig. 1 (j) Detailed connection diagram of spindle orientation
(when magnetic sensor is used)
131
APPENDIX 2 CABLE ENTRANCE DIAGRAM
3) MODEL 8, 12 cable entrance
1) MODEL 1/2/small MODEL 3
cable entrance diagram
(A06B-6052-H001,H002 ,H003)
2) MODEL 3, 6 cable entrance
diagram
(A06B-6044-H103 , 106)
diagram
(A06B-6044-H108.H112)
To regenerative resistor unit
I
f
I
I
2
1
T2
Control circuit I
At 6B-I 100-0080
/
<ta$
I 2
T3
PCB
Control circuit 2
AI6B-1100 -00 9 0 -2
I
I
CN1
T1
I
U)
ro
RSICGUVW
CHI
TU CN2 CN3
I-
'-JT
dmW
'
nSTGGUVW
I
z
Cf/3
CN2 TO
-4 t£=J [E=3 I
.
g g
a
CN1 CN3
I
CN2
TB
EE3
J i
Regenerative
resistor unit
0
J2.
To magnetic
control
panel or NC
To AC
motor
To AC
To magnetic motor
control
panel or NC ‘
To AC To magnetic
3’phasc AC Power cable
motor control
power supply To AC motor
panel or NC
To magnetic
control
panel or NC
220 V
D0S
AST
3-phase
AC power
supply
©
I
aw
200V
o u v
Power
cable
wfo"® 5 —
!VIBI
Pan motor
To AC motor
I
4) MODEL 8, 12, 15 cable entrance
diagram
(A06B-6044-H009 , H010, H011, H023)
5) MODEL 18, 22 cable entrance
diagram
6) MODEL 30, 40 cable entrance
diagram
[I
i
PCB
9
PCB
PCB
ii
CN 1
I
[I
CN2
CN3
123
U>
U>
magnetic
motor
CN!
magnetic
yj
725v
$ av
/I
T1
/_© 0 0 T2
Of V/VtyQ
T, 1
220V
To magnetic
control
panel or NC
To AC
control
panel
or NC
%
F F
Hi
V
HP
1 32 3
motor
2DOV
vwmi
ulfvy
nil .
5
S3W
T,
f
3-phnsc AC
Power
cable
Fan
motor
To AC
motor
Power Fan motor
cable
To AC
motor
motor
(in case of
model 40)
b.W
Power Fan,
cable
iH2lor
To AC motor
3-phase
AC power
supply
To AC
A
run
©
—
sa
I
"U
power supply
3-phasc
AC power
supply
CN3 CN2 TD
To
control
panel
or NC
SI®
CN3
<f=)
To AC
To
I
CN1
CN2 TB
To fan motor for
cooling the unit
radiator
APPENDIX 3 CABLE SPECIFICATIONS
The cable specifications are as shown below.
Prepare cables by users.
1) Power line and motive power line for respective motor models
FANUC
Use
Symbol
Specifications
specification
No.
For MODEL 1
(Lower than
5 KVA)
K1
K2
Cabtyre cable
JIS C 3312
4 conductors
I
T
37/0.26
1 2.0(4
(2.0mm3)
Crimp style
Crimp style
terminals
T2-4
terminals
T2-4
For MODEL 2
(Lower than
7 KVA)
Cabtyre cable
J1S C 3312
4 conductors
K1
K2
i
f
45/0.32
(3.5mm3)
Crimp style
terminals
T5.5-4
For MODEL 3
(Lower than
12 KVA)
4Z
1 4.00
Crimp style
terminals
T5.5-4
Cabtyre cable
JIS C 3312
4 conductors
K1
K2
A02B-0008-K853
7 m long
i
T
70/0.32
1 6.5 0
(5.5mm3)
15.5 0
Crimp style
terminals
Crimp style
terminals
T5.5-6
T5.5-6
For MODEL 6
(Lower than
16 KVA)
Cabtyre cable
JIS C 3312
K1
K2
A02B-0008-K854
7 m long
4 conductors
1
50/0.45
(8mnt3)
Crimp style
20 4Crimp style
terminals
8-6
terminals
8-6
For MODEL 8,
12 (Lower
than 25 KVA)
Cabtyre cable
JIS C 3312
4 conductors
K1
88/0.45
K2
(14mnt3)
Crimp style
terminals
14-6 (K2. Motive power line)
14-8 (Kl: Power line)
-
134
-
A06B-6044-K017
7 m long
T
24 0
Crimp style
terminals
14-6
A06B-6044-K018
7 m long
FANUC
Use
Symbol
For MODEL 15
(Lower than
30 KVA)
K1
K2
Heat-proof vinyl
cabtyrc cable
4 cores
A06B-6044-K019
7 m long
i
O
7/20/0.45
Crimp style
30 0
(22mm2)
terminals
22-8
For MODEL 18
(Lower than
38 KVA)
specification
No.
Specifications
R22-6S
Heat-proof vinyl
K1
K2
A06B-6044-K020
7 m long
cabtyre cable
4 cores
|
o-
T
Crimp style
terminals
38-8
terminals
38-8
K1
4 cores
-o
7/34/0.45
(38mm2)
Crimp style
38 0
terminals
Heat-proof cable for 600 VAC
Single wire (a) x 3 line and
(b) x 1 line
K1
K2
Crimp style
terminals
38-8
38-8
and power
source cable
for MODEL 30
A06B-6044-K021
7 m long
Heat-proof vinyl
cabtyre cable
K2
a
Power cable
-O
34.1 0
7/27/0.45
(30mm2)
Crimp style
For MODEL 22
(Lower than
45 KVA)
Crimp style
terminals
(a) Conductor
7/34/0.45 (38mm2)
Crimp terminal T38-10
©
(b) Conductor
7/20/0.45 (22mm2)
Crimp terminal T38-10
©
135
Use
Symbol
Power cable
K1
and power
source cable
for MODEL 40
K2
FANUC
specification
No.
Specifications
Heat-proof cable for 600 VAC
Single wire (a) x 3 lines and
(b) x 1 line
(a) Conductor
19/20/0.45 (50mm2)
Crimp terminal T60-10
©
C©
(b) Conductor
7/20/0.45 (22mm2)
Crimp terminal T38-10
©
136
I
2) Common line
The following cables are common to each model.
FANUC
Use
specification
Specifications
Symbol
No.
Spindle
servo unit
K3
(cooling
fan)
K4
servo unit
Attached connector
Spindle servo unit
option connector
CN2
of spindle motor
D
/
(for signal)
I
4-paired
cable
Housing
350720-1
Contact
MR-20 LFH
made by Honda
Tsushin Co.
K5
shield braided
conductor
CN1
D
Power
CN3
magnetic
control
(for signal)
A06B-6044-K024
Spindle servo unit
connector,
(basic)
D
MR-20 LMH
made by Honda
Tsushin Co.
K7
7 m long
100
T
Shielded 4-paired cable
0.3 mm5
Vinyl cabtyre cable
JIS C 3312, 3 cores
i
AC spindle
servo unit
(for meter)
30/0.18
Crimp style
A06B-6044-K023
7 m long
Braided shield vinyl cable
50 conductors x 0.2mm5
(7/0.18) made by Sanyo
Denko
MR-50 LFH
made by Honda
Tsushin Co.
K6
350689-1
Power magnetic control
12.5 0
Spindle servo unit
servo unit
Speedmeter
load meter
PVC sheath
connector (basic)
Power
magnetic
control
(for signal)
A06B-6044-K200
7 m long
»
Shielded
motor
Spindle
terminals
T2-5
(2mm5)
Less than 10 0
AC spindle
Spindle
servo unit
Crimp style
37/0.26
terminals
T2-5
18,22,30,40)
Motor
side
<
t 10.5 0
Crimp style
(Except Model
A06B-6044-K022
7 m long
Vinyl cabtyre cable
JIS C 3312, 2 conductors
>
AC spindle
motor
Spindle
Spindle
servo
unit
side
(0.75mm5)
terminal
T
o
9.2 0
Crimp style
terminal
T14
Tl-4
137
3) Others (line used in some models)
Use
For motor
cooling fan
(for MODEL
18,22,30,40)
Symbol
K3
FANUC
specification
No
Specifications
.
Vinyl cabtyre cable
JIS C 3312, 3 cores
Conductor
Outer cover
37/0.26 (2mm3)
PVC 010
tÿ5»
I
10.00 Crimp style
Crimp style
terminal
terminal
T2-4
T2-4
Resistor
unit
K8
>
AC spindle
servo unit
Crimp style
terminal
T5.5-4
Resistor
unit
Power
magnetic
control (for
thermostat )
Vinyl cabtyre cable
JIS C 3312, 2 cores
i
12.00
Crimp style
45/0.32
terminal
T5.5-4
(3.5mm3)
K9
Vinyl cabtyre cable
JIS C 3312, 2 cores
>
i
T
>
Crimp style
terminal
30/0.18
(0.75mm3)
Tl-4
138
-
8.8 0
<
Crimp style
terminal
Tl-4
5?
APPENDIX 4 MAIN CIRCUIT DIAGRAM
4.1 Main Circuit
Spindle control circuit (PCB)
CN1
SUI lull
CN1
To magnetic
control panel
or NC
To motor
*
To motor
CN2
RI: Rtt RID ROT RM ROT nos RM R04
Raj
mu
CN3
u r»
ss
Rat
RA
PA
)
ai aii SOT JZJT
os
OR
IcN 3 [ ] CN4
jCN2[] S“
{TB|
II
il
4G
IK
ALU AIM TUI
t
1
In
I1
t
il
zx
X
_
P.C.B
_
SC
sx sc
IS
II
CN5
II
ruu
JJ
ulT
PY 3 1 PY >
UR
nT
OT
mi SSI
L
3
II I IlAjthot
1 [I
SIT
I
AX I AU All AU
an an ov
TB
CN6
1
1C
JX
i
it
tt
il
ISC ISC
BE
IB
it
IK IW1
SW|
i
1C
71
71
1C
It
AC
II
SE
•war
CN7
_l_
10_
OU utt CD4 CW CDl CDI
ICN4
II
11
II
IS
ISA ISt l«B
IE
4B
4C
II
1
J
JOT JOT CD, CD4 VD, vn, vni VD4 OLI
CN5
|
1
I
SE
IB
CN6
> [
JC
~
t |
IE II
OH
X
T
SU Lit
I
1
IE
IB
1C
CN7
siv SW1
SW2
A1
21
I
TE
S_i
J
CD3
19 ci
UZ
TM1
I
Z1
m,
MCC
Fl
WMCC
-
IA)<?
(2)
DM1
CMWV-JI
(1)
R
AC power
j" o-j(
'
200/220V s j i
50/60Hz T ! o-j.
1
G
SIC (2)
DB
MCC
rrt"Lc
C2
—
TM1
3C
i§?
IE
3E
TM1
5C
iSJ
5E
L_A
(0
(2) OLI
CD 4
CD2
I
CDI
TR1
TM 1
2C
TM 1
40
+
2E
zzz
Cl
VD2
i) MODEL 1,2, small MODEL 3
o-enp-o
--
GC
GE
-H
(P.G
T1
1
-a |U
(I)
AC
7CD3' I|°I >V~( SP‘ndle
j|jvV_ÿmoto
TM1
cgicgi&i
DM
} CDI
cwinrÿo
CD2
CD4
w
To CN2
TM
H
“1
iiA
_,
( i ) ACR (2)
n
-5==3
—-,d-o-rnrÿ-o
<3)
<i> rT2)lA£=5-o-ana-o-
_
_
Regenerative
discharge
resistor
l
i
1C
LJ
CN1
To magnetic
control panel
or NC
CN1
)
CM
cm
,CN3[] CN4
Spindle control circuit (PCB)
ill
"7
iV'Ii
~
CN2
u
IT
u
ss
PB
RB
RA
PA
Ml,1.1.1.1.
«
IH
CN3
IT
it
ROI R04 ROI ROI ROI
li'l
)
All AL2 ALA AU
LAcl
TB[]
P.C.B
1C
il | II
~Ta~
»
I
1
«
I
2C
2K
SC
IK
SC
3K
1C
il
II
4K
J
1
TB
l«
il
II
II
l«C ISC
t£
10
1C
II
200
IK SW2 SWI
CN5
II
4
i
CN4
sw
T
»
l
7i
7C
U
4E
4B
6B
bC
it
i
l
I
l
T
tc
IIA
OU
SU
LU
l
ucc
l
I
14
CD4 CD7 CD1 CDI
CN5
il
l)
1*A 1*0 110
2E
2B
IB
«T
IE II
CN6
JC
1C
>
i
IE
IB
1C
CN7
SWI
v
1
MC C
2*ra
c
7E
CN7
il
100 100 CD! CDS VDI VDl VD2 VtM OLI OL1
SW2
I
ov
Dili an
CN6
jcN2[]
To meter
II I
not
*»
OVB OVR DR DR
OR OR TUi
DA: DAI IJV
i Icnikvi IÿIARI IARII II bn I m
I I
1
11 l
ID | j
« | II I I I 4
5DT SOT OS OH ALMI ALMTU4 TUI UR UR ul
nT [TU4 SST S3T SAJI 5aK
IL 2
J DY1 DYI
2
I1 6
I
I
2
E
II
To motor
non R07
SRV SFT1 Ri: RlI RIO RW
'
TF
Taa_
r&a
j
MCC
F7
(1)
O
o
-O
CM
(2)
(1)
(5)
(6)
R4
12)
0“\-0
FAN
VDl
I
-6TMl
TM2
4S
TM3
ic
O
ai
I
MCC
CRM
F4b9
(2)
AC power
200/220V
50/60 Hz
__
'2)
I
T
I
I
I
A
IE
w
5E
(1)
D
OL2
o--o42)
P. G
6
Regenerative
control circuit
I2)0L1
CD2
ii)
o
ns
ID R6
CD4
F3®
(1)
To CN2
TH
ID F2(zi
200T
T1
®icm
12)
t-O IU
I (1) I
4-0 IV
I (2) I
4-0 I'V
i <a> i
V
\ 2005
tif
DM
TM 1
TM 2
TM 3
+ 7777
+
20
F6
Tip
A
2E
O-
MCC
-O
ca)
O
(4)
VD2
ii) MODEL 3
22
10J
5®
4E
GE
41
AC
spindle
motor
r—1-0 IG
F" [ÿ[1
13
FAN
I
fiC
Note) F4a has been added
since September 1982.
v
3!
-6-
(2)
ASA
°
O—L
SK
iS?
IE
O-wsHhO
i
i
6->
(1)
nr-_l
Hi o-r
sI
(A)
F5
OÿMCC
I
!
1-0
FMA
I
U6LI
FMD
_
IT
Oil I LU I
CN1
_
Spindle control circuit (PCB)
CN1
t
™ ‘f
Ri: R11 RIO RW
)l
In
I ' 'I
II
panel
ts
003 ROT R06 RW RIM ttOJ RflJ R0|
cu|cni|*f
.CN 3
os
OR
11
10
ALX
rui MR UR
S |pYI|PVt
*
|mi
nT
OI
IL
6K
13
II
4K
4G
IC
»
»
2K
SC
IK
1
3K
JG
1C
1
1
)
sut
n
sw
i)
n
__
G
1
Ir
t
10
TS
1C
71
IE '(I
I
*
1C
JE
1
41
«T
IVA
1
TTT
ou
OI LU
cm
11
II
11
10
IRA IRI IW
4E
41
K
CN5
l«
*
IE
1
31
t
1
J
JC
2E
IB
IT
l
1
IE
II
IC
CN7
CN6
(4)
MCC
-o CM
(2) (II
Ft
R3
FAN
VDI
fEO
TM1 ,2
mnJ
iSf
®MCC
IE
F2
-cr-Cpÿ
...
(1)
<ZItI31
_
(2)
(i)
®
200T
—
'«>
0L2
3E
5E
control circuit
(3)
113
2Q0S
DM
:::
rr
THI
r.G
T1
R1
C D ?.[
s
CDtt
TM3 ,4
2C
TM7 , 8
TMU.10
4C
fiC
To CN2
TH2
ID
(2) °C1'
555
(4) (2)
-o-TJUÿ-o
F3
TM9.10
Regenerative
o-wvji-6
SK 12)
200R
TMS , 6
1C
lUT
(A
r—
O-
I
II
II
(3)
(I)
200/220V s 1 °~
50/60 Hz TI1 0 ,
t£
11
MCC
o
MCC
12)
„!
IRC IRC
11
L_„_
HIp
F5Y6
Mi
RI
i>
SW1
6
(21
ti
200 700 CDS CD6 vni VD3 VD3 VD4 0L1 OU UCC CTU CD1 CD!
Z4
I
TB
i«
11
CN7
i
4>*
1
g
AL1 All KL4 Alfl
an an ov
CN5
n
I
5T SST" SAA IAF
I |I I II
300
IK IWJ SWI
ICN4
AC power
PA
RA
CN6
I*
jcN2[]
{ TB| P.C.B
fcC
Tui TU4
I |i|
[ ] CN4
II
To meter
n
AJ
JV
’
To motor
|T
IT
To magnetic
, cocontrol
CN3
CN2
w
—
O
R2
W-l [o]u
AC
spindle
motor
1
TcM-r iV
o !vv
WHD
xrr
[=E[1FAN
-o FMA
+ a zr +
-o | FMB
2E
4E
4-0
MCC
'
VD2
(G) (5)
I
iii) MODEL 30,40
-
6E
j FMU
FMV
~ I FMW
APPENDIX 5 MOUNTING LAYOUT OF SPINDLE SERVO UNIT PARTS
(OTHER THAN PCB)
1) MODEL 1, 2, small MODEL 3 (A06B-6052-H001, -H002, -H003)
T2
Electrolytic
capacitor
Transistor
Cl
©
TR1
G
DM1
Diode module
AC reactor
ACR
Transistor
module
TM1
TF
MCC
Magnetic
7
contacter
7
2_
T1
Fan
(Semiconductor module)
Control power transformer
Z1: Surge absorber
A50L-2001-0155/20D431
1
Fl
cS)
PCB
A16B-1100-0090~92
230V\ 200V
Fl : Control power transformer
input fuse
£
Control power transformer
tap selector switch
A60L-0001-0031/15A
I
142
-
I
2) Spindle servo unit for AC spindle motor models 3 and 6 (A06B-6044-C008)
F4a, b: Control transformer input fuse
A60L-0001-0031/5A
_
F5, F6: Regenerative control circuit fuse
A60L-0001-0036/PC1-20
O/ /
:S't 1 Z 4
O
r
©
Control power transformer
TF (below the fuse mounting
II
board)
e|«
©
f®;
v © /
©
©
T“*
-p
FAN
i
FAN: Fan motor
A90L-0001-0099/A
(rear
side of board)
F4 F5 \FG
C4
/
Radiation fin
Electrolytic capacitor
s,
(Each semiconductor
module)
-o
F7: DClink fuse
A60L-0001-0147
C5
Magnetic contactor
F7
—
MCC
Upper metal plate
;!•!. Z 1
—
3
i
n
0
©_
n
220V
TI
©
200V
\
X
—
FI F3: AC input fuse
A60L-0001-01 27/25FH75
(A60L-0001-0148)
- 143 -
Control power transformer
tap selector switch
A
*1. Z1 ~ Z3, Z4: Surge absorber
A50L-2001-006 2/441-1 2
3) MODEL 3, 6 (A06B-6044-H103, H106, H203, H206)
FAN: Fan motor
A90L-0001-0191
(for model 3)
A90L-0001-0099/A (for model 6)
a
5
_i
Radiation fin
•R
M
1
(Each semiconductor module)
R
M
2
AC reactor
Magnatic
contacter
Electrolytic
capacitor
C4
ACR
MCC
Control power
transformer
TF
F4a, b: Control power
transformer input fuse
A60L-0001-0031/5A
Zl~4 Surge absorber
Control power transformer
tap selector switch
A50L-2001-0155/20D431
n
|© ©
Ta
M
FI F2 F3
220V
i#ff
-=2 200V
F
7
Terminal with fuse holder
(It is mounted above MCC, TF)
®
®
®®
® ®® ® ® ®®
0
r
F7: DC link fuse
A60L-0001-0127/25FH75
F5, 6: Regenerative control
circuit fuse
F 1~3: AC input fuse
A60L-0001-0147
i
A60L-0001-0197./PC1F-20
144
I
4) Spindle servo unit for AC spindle motor models 8 and 12
(A06B-6044-C009, C010)
F4a, b: Control transformer input fuse
A60L-0001-0031/5A
F5, F6: Regenerative control circuit fuse
A60L-000 1-0036/PC1-30
0
*1. Z 4
N
Control power transformer TF
(below the fuse mounting board)
—
j
® if®
©
O
EHi
«=»-
©He
-P
J:
FAN
i
cl-
FAN: Fan motor
A90L-0001-0099/ A
(rear side of board)
C4
Radiation fin
Electrolytic capacitor
(Each semiconductor module)
C5
C6
F7: DC link fuse
A60L-0001-0145
Magnetic contactor
F7
MC C
[I 7r
o
AC reactor
AC R
R5
mi. zi-3
R7
R6
fi
»•
Fl ~ F3: AC input fuse
A60L-0001-0145 (Model 8)
A60L-0001-0149 (Model 12)
Ti F3
M
lol
©
ollQllelleljellQ
©
0||0||0||©[le||e
o
©
T1
220V
I (fi) s w
k_A
20DV
A
*1. Zl
-
3, Z4: Surge absorber
A50L-2001-0062/44 1-12
145
Control power transformer
tap selector switch
5) MODEL 8, 12 (A06B-6044-H108 , H112, H208, H212)
FAN: Fan motor
A90L-0001-0099/A
s
R
M
*'X
Radiation fin
(Each semiconductor module)
1
R
M
2
AC reactor
Magnetic contactcr
ACR
C4
MCC
Electrolytic capacitor
Control power transformer
C5
TF
F4a, b: Control power transformer
input fuse
A60L-0001-003I/5A
A
!QQI
@@@
© © ©
FI
F2
Z1 ~ 4: Surge absorber
Terminal with fuse holder
(It is mounted above MCC, TF and C5)
220V
F5
F7: DC link fuse
A60L-0001-0145 (For model 8)
A60L-0001-0149 (For model 12)
© ® ® 0
O
-
3: AC input fuse
A60L-0001-0145
I
F7
©
200V
© ® ® ®
FI
F6
ISW
F3
®
A50L-2001-0155/20D431
Control power transformer
tap selector switch
O;
F5, 6. Regenerative control circuit fuse
A60L-0001-0197/PC1F-30
-
146
-
t
6) MODEL 15 (A06B-6044-H011)
F4a, b: Control transformer input fuse
A60L-0001-0031/5A
F5. F6: Regenerative control circuit fuse
A60L-0Q01-0197/PCfF*30
:lr 1- Z 4
Control power transformer TF
(below the fuse mounting boad) c—
o/7
0
ppj4®F
klr
/
t
e , e**\, i e
'
i
t
N.'
s. •"
Fwr
/'"s
N
e
S
•
FAN: Fan motor
IMl
,1b
—
r 5 r
A9DL-0001-0099/A
c,~
if/
-Ti
F AN
i
C1-
!ÿ
r'a
C4
Radiation Fin
(Each semiconductor
module)
Electrolytic capacitor
C5
\
C6
Magnetic contactor
F7: DC link fuse
—
A60L-0001-0149
MC C
F7
e
o
Cement resistor
AC reactor
5S? 1-
Z 1~~3
ACR
Rt
R7
R6
(o '0
V
Gr
0
[r i
a w 2 20 V
72] 73]
E===3
©
FI ~ F3: AC input fuse
A60L-0001-0149
G
G
e
*1. Z1
L- ®
(§)
—
Q
0
<S>
-J
T1
T2
3, Z4: Surge absorber
A50L-2001-0062/44M2
147
200 V
Control power transformer
tap selector switch
7) MODEL 18, 22 (A06B-6044-H016, H017)
FAN: Fan motor
A90L-0001-0099/A
/
o
irp-3
/
o
7
i
C*-_“ FAN
RM1
H
U
1
Radiation fin
(Each semiconductor
module)
F7: DC link fuse
A60L-0001-0149 (Model 18)
A60L-0001-0163 (Model 22)
R
U
2
\J°L
F7
i°r
Magnetic contactor
AC reactor
A C R
MC C
- 5: Surge absorber
A50L-2001-0155/20D431
Zl
F5, 6: Regenerative control circuit fuse
A60L-0001-0197/PC2F-40 (Model 18)
A60L-0001-0197/PC2F-50 (Model 22)
TF
\
FS
m
r
G
!il
G
©
o
FI ~ 3: AC input fuse
A60L-0001-0149 (Model 18)
A60L-0001-0163 (Model 22)
[51
s)
.
FG
©
4 u 2D0V
4
bSW
B
r- O
O
O
L
O
8
Fq=
=
B|
G
Wi
©no
Control power transformer
tap selector switch
T2
T1
o
o
F4a, b Control power transformer input fuse
A60L-0001-0031/5A
I
-
148
I
8) MODEL 30 (A06B-6044-H130)
FAN: Fan motor
A90L-0001-0096/C
0
Control power
transformer
|
TF
FAN
RM2
f
0
RM3
RM1
Radiation fin
Electrolytic
capacity
Ft
R3
!
Q=D
ACRÿj
Cl
)(
C3
©0
MCC
Q=D
n
Magnetic contactor
AC reactor
Fl~3: AC input fuse
F4 : DC link fuse
Zl~3: Surge absorber
A60L-0001-0183/225A
A50L-2001-0155/20D431
Z4: Surge absorber
A50L-2001-0062/441-12
Z1 Z2Z3
OOP
O
ram
R1 R2
©1 Ft F3
F7B9 5
F5, 6: Control power transformer
input fuse
6ÿ
F7~9: Fan motor input fuse
A60L-0001-0031/5A
G1
R S T
G2 U
V
W FMUMMA.
230
Tl
.
S’
Control power transformer
tap selection switch
- 149
-
9) MODEL 40
FAN: Fan motor
A90L-O0QI-0Q96/C
I FAN I
<0
Control power.
transformer
TF
| RM2 || RM3~|
0
RM 1
Radiation fin
(Each semicondustor module)
R3
F4: DC link-fuse
A60L-0001-0183/260A
R1
Ft
R2
Magnetic contactor
Cl
Y
C4
C2
Y
C5
C3
Y
C6
MCC
Electrolytic capacitor
AC reactor
ACR
wv
F5, 6 : Control power transformer
input fuse
F7~9: Fan motor input fuse
A60L-0001-0Q31/5A _
Fl~3: AC input fuse
A60L-0001-0183/260A
F7.B.9.5.6
V
—
Gl
Ft IF2 F3
—
am]
T2
|VMV[Mu|v[wl[TTTn
L— J
—-
J
FMI.V.W.A.H
SWF
f
svw
<S> <3
1
60/
230/
50Hz 200’
Power frequency selection switch
i
150
Control power transformer
tap selection switch
I
APPENDIX 6 MOUNTING LAYOUT OF SPINDLE CONTROL CIRCUIT PCB
a) MODEL 1, 2, small MODEL 3
i) A16B-1100-0080
©
Drawing number
AI6B-1100-008D
CH29-:
Modified
drawing No.
Edition
]
[
/\
RC
N
5
@ 0V
rCLK
© +3V
© +1 5 V
-CH32
-CH25
-SLP
CH34C
"
—
Variable resistors (RV1 19)
Setting terminal (SI ~9, SI 5)
5 R£
© ©CH2 2
© ©CH24
© ©CH26
©
© CH3 3
© 24V
CH30CH3I-
[ffl]
[]
— Check terminal (CH1~42, etc.)
ROM
©-] 5V
C
N
G
C
© CH 4 0
©CH39
©CH38
©CH42
©0V
©CH37
©CH3G
©CH35
©CH4 1
© [ÿRVn
©
PIL ARARM
,8 4 2 1.
@[§]RV7
O00OO
C N 9
-© ©[©1 RV5
~© © [©] RV 1 2
0V © ©
CHI 5
[g]RV14
S8
-0®
|©[Q]RV3
S©f©lRV4
4
-m©®
ss -ge©
-0®H
<&H]
S 7 SG
(Upper)
0-
R2-25
Receiver
DA converter
(CCD or CBI is
selectable)
Receiver
Input side
resistor
Receiver
RIB
contact
0V when
RV 1 0
RV1 1 B
CH4
sis
rOV
-ARS
-CHI 7
-CHI 8
-CH 8
RV1 1A
®m RV9B
CCD
CH6
|[S]RV9A
©[Q] RV8
-CH7
-CH5
“CH 3
-CH2
-CHI
-© <3[Q] RV 1 9
-© © [fflRVlB
'D ©
—
Rl 0 -
R2
contactor
closed
RV 1 3
s9
CBI
External
side
-CH2 8
-CH21
-CHI 1
-CHI 0
CHI 4
CH9
CHI 2 CHI 9 CH20 CH13-
N
+24V
I-CH23
CNI
Control signal connector
SW
S3 S 2
-ffl©ÿ RV2
SI S 4
-ÿ©[©] RV 1
TB
OV SM LM
CN2
CN3
\ Alarm data signal connector
/Alarm reset/
Motor signal connector
Terminal board for
speedometer and
load meter
/
151
ii) A16B-1100-009CK92
Check
terminal
r—i
Ivxl'"
Drawing
number
Variable
resistors
Edition
/
/
n
A1 6B- II00-009 D/l
R[
]
/
Fuse
Modified
drawing No.
Power section
5
FG
C
N
RVl 5
5
d
HEAT SI NIC
CD3
AF1
o
c
Alarm fuse
DC link
current
detector
N
FF
6
«
I
I 1FF
|FD
d
RV25D
C
I lFB
N
4
I IfC
Transformer
©
CT ©
1 9B ©
1 9A
T1
Fuse resistor
PR 1
CZh
FR2
o
Relay
RL
230V
Fuse FI
200V
RV25A
CD 1
CD2
U phase
V phase
current
current
detector
detectoi
CD 4
DC link
voltage
detector
RV25B
Switch
sw
CRV
CRU
Control power
transformer input fuse
I 1f*
—— © ©—
© © ©
VDC
0V
I DC
Control power transformer
tap selection switch
)
152
d
RV2 5C
I
b) MODEL 3ÿ22
•—
. .. .,
R
A
C
4
,
Check terminals (CHI
~ 32, etc.)
® Variable resistors (RVl - 19)
Q — Setting terminals (SI - 7)
Notes
.
n
.
..
r,
H
r
FA
Transformer
Power supply
heat sink
T1
RV15
m
00B
© 19 B
RV 17
CT
©
m
CH32
CN7
FDQ LT
Alarm fuse
AFl AF2AF3
©
a
FBO
FCQ
© 19 A
n
© CH31
© CH30
© CH2 9
Transformer
CH2 8
-15
© OV
©
©
© +5
|)
© +1 5
FH
n
ROM
CH 2 5 0© CH2 6
CH2 3 ©© CH24
CH2 1 ©© CH2 2
CHI 9 e© CH20
CHI 7 ©© CHI 8
© +24
© CLK
3
f- CHI
CHI 4
©
ARS
© SLP
D
0
-a
- CHI 5
- CHI 6
—
a
m
Pilot alarm code
ffi <3 RV5
CHI 2 - £ RV4
RV3
CHI 1 -
D
D
ISAMP2 ISAMP1
Relay
© © © SL
C N 9
Indulatcd amplifier
g]RV14
©
—PIT.© Q©€>©
AT .ARM a RV6
Display LED
cs
Version
FG CN6
T2
- RV1 3
S 6 L- RVl 2
RL
DQS7
—
£n
0S5
CN5
RVl 1
gjRVIO
S10
RV9
I]RV8
RVl 6
LT
CHI 0 CH 9 -J
S8
S9
n
Drawing
number
Receiver
Pull up resistcr
in input side
(Upper)
+ 24V
R1-R24
)
irrr
(Under)
External
connection
side
OV when
contactor
dosed
JH1
i
..01
Alarm reset
switch
i
i i
CN 1
t
Control signal connector
DA converter
(alternative)
Receiver
CN4
)> C B I
[ peep
1*11111
!?«3B552Sg=|
• * •i i rii
CH8
OV
© CH7
©
©
RVl RV2 OtjQQm
\ | si,32,a.Ta4
[£1£] CN 3
RVl8 RV19
CHlCH2{g[<g
© © © ©
CN 2
7
CH3-CH4 CH5CH6
1
OV SM LM
TB
\
Alarm data signal
connector
LT
J
1
Terminal board for speedometer
and load meter
Motor signal connector
.
r
153
c) MODEL 30, 40
Notes!
terminals
— Check
-~32,
Variable resistors
terminals
~
Q—
(CHI
(RV1
0
{
[(13
(SI
Setting
etc.)
19)
7)
-i
— n
FA
Transformer
FBQ
Power supply
heat sink
T1
m
BBS
Alarm fuse
FDQ LJ
AFl AF2AF3
©
RV 17
©
CH3 2
m
ARS
SLP
©
o
)>
FH
ROM
.
CHI 3
-
CHI 5
r CHI 6
[
-0
Relay
R9 RV 1 0
Gt RV 9
© is RV5
V4
CH 12- 3 R
CH1 1 - 3 RV3
CHI 0 CH 9 J
D
0
RL
—
C N 9
S8
ISAMP1
- RV1 3
3 DQS7
3 n S 6 - RV 1 2
L
RV1 1
3 Qs 5
PIL ALAÿfel RV6
Display LED
Indulated amplifier
g]RV14
RV7
Pilot alarm code
Version
CH 2 5 ©© CH 2 6
CH 2 3 ©© CH24
CH21 ©© CH2 2
CHI 9©© CH20
CHI 7 ©e CHI 8
-f CHI 4
cc
f|
FG CN6
T2
© +24
©
n
Transformer
© OV
© +5
© +1 5
CLK
19B
© CT
© 19 A
© CH31
© CH30
© CH2 9
© CH2 8
© -1 5
©
CN5
0
S10
RV16
LJ
m
$9
Drawing
RV20
m
number
(Upper)
+2 4 V
R1-R24
D
(Under)
External
connection
side
OV when
contactor
closed
CN7
FC[]
RV 1 5
n
Sll
D
© CH8
© OV
Receiver
Pull up rcsistcr
in input side
| | | | If I
iii
DA converter
(alternative)
Receiver
SpfiSlIIIi.
'Sllmu
Hr . CN 1
/Ii ii i i i i i i i i
Alarm reset
switch
Control signal connector
r
©
CH7
CN4
|)CB1
t)
RVl RV2
\ I
E333
CCD
DqDn
31.32,03,34
RV18 RV19
CHlCH2ÿ|g
©-ÿ
© © © ©
CN 3
CN 2
7
1
1
_
I
LT
OV SM LM
TB
\
Alarm data signal
connector
CH3 CH4 CH5CH6
Terminal board for speedometer
and load meter
Motor signal connector
-
154
-
CL.
>
n
cn
>
N>
o
co
3
CL
H*
(D
i
1
S. s
S’
8
“n
g
§
I
1ÿ
•v
co
o
o
‘V
(D
I
te
o
I
o
cn
§
3
5?
n
2:
w
j-t
to
o
rt
o
U)
Ol
f 0
D
H
CO
a
CO
>
n
n
*)
CH31 , CH26
CH30 , CH24
9
a
Ln
U1
I
OV
CHI
CH2
CH 13
O
O O
o o
o
P3
O
O
2
Drr
o
5P
o2
CO
r
to
o
z
>
CO
03
n
CO
--NiOpOroC-ÿÿr to to
mu
-4 CD o <w M
*-**-»
l£)
"3
to
O O
CO
n
S 11
S 5A
S5B
2
CD
CH29.CH22
5
C/3
to
I
o
cr
P
p
o
X
to
MB
to
H-*
CN6
CN7
o oo o o
to
a
VQ
PP
b
cr
CL
a.
CN5
D3
u
[S
<
n
•—
PP
CN4
P
K O
o
co
to
o
oo
ID
cn
CO
to
-4
to
h-*
OM tn
<
CO
O O O O O O
o
co
-3
P
CN12
PP
CNll
-l>Ln
<
PP
H*
a
C
rt
X)
(D
z
to
<
rt
co
Pd
to
CO
O
>
o
oooooooo oooooooooo
<=jpj
c
3
H*
o
O
CO
2o
CN 8
P
e) Digital AC spindle servo unit (MODEL 3 to 22)
Power supply unit
/
/
+
Heat sink
a
o
D ° 11|
+
u go
TO
FC
LT
5
FD
Alarm fuse
002
001
m@
i
Number
Drawing
number
-Q
_
0>
0ÿ5
z
FG
go°i
DisPlay
fl
Os' 6
Lr
Oo
°§
H N Q
DA convertor,
one choice
out of two
fCBll
n
°cim
oa
Setting
switch
[
of version
FE
02
[ROM] {’ROM|
0©
n,
£ £ CQ
~O
§
BBBBB
FA
Fuse
1°
§i°
sN°
go
CM 5
°°&.
°J
°IE
Lr
OSS
go OS
j> CCD |
J>o °S
lo
Handing resistor
at receiver
input
Receiver
Receiver
|o
o
n
g
Og
SO 0£
CM-I
SO
Check terminal
CN1
LT
OV SM LM
CN3
CN2
Connector for
control signal
Connector for alarm
contents signal
X
Terminal block
for speed meter
and load meter
Connector for
motor signal
_
A%
!
.S
-
156
ITB~I
-
I
f) Digital AC spindle servo unit (MODEL IS, 1.5S, 2S, 3S, 2H, 2VH)
F3A
ROM
001
ROM
002
o
SI
QF3E
DPIL
0
Display part
Drawing No.
and
Edition No.
Setting
QF3G
NVRAM
switch
RV1
CN9
I IRV2
I 1RV3
CN5
F2
ERO
VCMDO OCLK1
TSAO OSL1P
DS2
-15
© OTS3/
;pgpÿ QJ\ pss
,
DTDCO
RV5
LMO O
SMQ Oj-JRV6
0V© O IU
S4
TS2
VDC
iwo Orv
PAPO 0+15
+24 0
_
CN1
OPBP
ORB
ORA
OPB
OPA
ODAZ
CN4
CN2
157
C/£
APPENDIX 7 MAJOR PARTS LIST
ASQI.
l)-a) Fuse and surge absorber (MODEL 3ÿ22)
MODEL
MODEL
Itern Symbol
1
F1ÿ3
3/6
-,2?
Ooo {
MODEL 8
©
joj
MODEL 12
Name
A06B-6044-H007 A06B-6044-H103
A06B-6044-H009 A06B-6044-H108 A06B-6044-H010 A06B-6044-H112
HI 06
H008
Fuse
A60L-0001-0127 A60L-0001-0147
A60L-0001-0145
MODEL 15
A60L-0001-0149 A60L-0001-0145
MODEL 18
A60L-0001-0149
MODEL 22
A60L-0001-0163
/25FH75
A60L-0001-0131/5A
2
F4a ,b
Fuse
3
F5 ,6
Fuse
A60L-0001-0197/PC1F-30
A60L-000l-0 1 97 /PC 1F-20
A60L-0001-0197 A60L-0001-0197
/PC2F-40
4
F7
Fuse
A60L-0001-0147 A60L-0001-0127
A60L-0001-0145
A60L-0001-0149
/PC2F-50
A60L-0001-0163
/25FH75
I
Ln
OO
5
Zl*v4
A50L-2001-0062 A50L-2001-0155 A50L-2001-0062 A50L-2001-0155 A50L-200 1-0062 A50L-2001-0155 A50L-2001-0062
Surge
/441-12
/20D431
/20D431
/441-12
absorber / 4 4 1—12
/20D431
/ 44 1—12
6
AFi
Alarm
fuse
A60L-0001-0046/3.2 (3.2A)
7
AF2 , 3
Alarm
fuse
A60L-0001-0075/3.2
8
Fa-h
Fuse for
A50L-2001-0155/20D431
(3.2AS)
A60L-0001-0175 (0.3A)
PCB
1
*
*
l)-b) Fuse and surge absorber (MODEL
1/2/small
MODEL 3)
l)-c) Fuse and surge absorber (MODEL 30/40)
MODEL
Item
MODEL
MODEL 1
Symbol
MODEL 2
Small MODEL 3
Item
Symbol
Name
Name
MODEL 30
MODEL 40
1
FI
Fuse
A60L-0001-0031/5A
1
F1A,4
Fuse
A60L-0001-0183
2
Zl
Surge absorber
A50L-2001-0155/20D431
2
F5ÿ9
Fuse
A60L-0001-003 1/5A
3
AFI
Alarm fuse
A60L-0001-0046/3. 2 (3.2A)
3
AFI
Alarm fuse
A60L-0001-0046/3. 2 (3.2A)
4
Fa-g
Fuse for PCB
A60L-0001-0175 (0.3A)
4
AF2, 3
Alarm fuse
A60L-0001-0075/3. 2 C3.2AS)
5
ZK3
Surge absorber
A50L-200I-0155/20D431
6
Z4
Surge absorber
A50L-2001-0 162/44 1-12
7
Fa-h
Fuse on PCB
A60L-0001-0175 (0.3A)
A60L-0001-0183
/225A
/260A
}
f
2)-a) Main parts (MODEL 3ÿ22)
Itern
1
Symbol
(Note)
P.C.B.
MODEL
MODEL 3
MODEL 6
MODEL 8
MODEL 12
MODEL 15
MODEL 18
MODEL 22
A20B-0009-0533
A20B-1000-0693
A20B-0009-0534
A20B-0009-0538
A20B-0009-0539
Name
PCB
A20B-0009-0530
A20B-1000-0690
J10'
A20B-0009-0531
A20B-1000-0691
-
Jll
A20B-0009-0532
A20B-1000-0692
J02
J03
ROM
Memory element
3
TM
(1-12)
Transistor
module
A50L-000 1-0096 /A
4
SM
(1-3)
Thyrister
module
A50L-5000-0029/30
5
DM
(1-3)
Diode module
A50L-2001-0138
6
D
Diode
A50L-2001-0103/12JH11
Diode
A50L-2001-0103/12JG11
Diode
A50L-2001-0097/U06G
A50L-0001-0109
A50L-000 1-0096
A50L-0001-0109
J06
J05
J04
2
/A
A50L-5000-0029/50
A50L-5000-0029/80
A50L-2001-0 168
A50L-2001-0146
(1-3)
I
7
D
(4-6)
Ln
8
D
(7,8)
I
9
10
C
(1-3)
Capacitor
MCC
Magnetic
A42L-0001-0103
A58L-0001-0092 /A
A58L-0001-0094 /200V 1A1B
A58L-0001-0146
A58L-0001-0165
A58L-0001-0166
contactor
A80L-0001-0276
11
TF
Transformer
12
FAN
Fan motor
A90L-0001-019 1
13
TH
Thermostat
A57L-0001-005 1
A57L-0001-0051
A57L-0001-0051
A57L-0001-005 1
/B100
/B90
/B100
/B95
A5 7 L-0001-0052
A57L-000 1-0052
/B150
/B150
A81L-0001-0076
A81L-0001-0075
14
ACR
AC reactor
15
SW
Toggle switch
A90L-0001-0099/A
A8 1L-0001-0077
A5 7 L-0001-0048 /A
A57L-0001-0028
A57L-0001-0046/150
A81L-0001-0080
A81L-0001-0063
A56L-000 1-0030
A50L-0001-0048
/2A
Note) Parts number in parenthesis are different depends on unit model.
Refer to the parts mounting label in the unit for the details.
A5 7 L-000 1-0046/90
2)-b) Main parts (MODEL
1/2/small
MODEL 3)
2)-c) Main parts (MODEL 30, 40)
MODEL
Item
MODEL
MODEL 1
Symbol
MODEL 2
Small MODEL 3
Symbol
Item
Name
I
1
P.C.B.
PCB I
2
P.C.B.
PCB II
3
ROM
Memory element
4
TM1
Transistor
module
A16B-1100-0090
J21
A 1 6B- 1100-009 1
J22
TR1
Transistor
A50L-0001-0I26
6
DM1
Diode module
A50L-2001-0138
7
Cl
Capacitor
A42L-0001-0142
8
MCC
Magnetic
A58L-0001-0207
contactor
9
10
1
•
MODEL 30
A20B- 1000-0700
MODEL 40
A20B-1000-0701
P.C.B
PCB
ROM
Memory element
Transistor
module
A50L-0001-0116
A50L-5000-0033
J07
A16B-1 100-0092
2
J23
3
TM
(1-22)
4
SM
Thyristor
(1-3)
module
5
DM
(1-3)
Diode module
6
D
(1-16)
Diode
A50L-2001-0103/12JH11
7
D
0-15)
Diode
A50L-2001-0103/12JG11
8
MCC
Magnetic
A58L-0001-0133
A58L-000 1-0159
contactor
/200V
/200V
J08
A50L-0001-0125
5
O
I
A16B-1100-0080
Name
TF
Transformer
A80L-0001-0486
ACR
AC reactor
A81L-0001-0083/3
A50L-2001-0171
9
TF
Transformer
A80L-0001-0276
10
FAN
Fan motor
A90L-0001-0096/C
11
TH
Thermostat
A57L-000 1-0028
12
ACR
AC reactor
13
SW
Toggle switch
A81L-0001-0078
A81L-0001-0079
A57L-000 1-0048 /A
APPENDIX 8
PCB ADJUSTMENTS
1) MODEL 3 to 22
The following table shows the adjustment of PCB in each AC spindle servo unit.
Don't change RV 7, 8,/4ÿ19, 25AÿD variable resistors, since these parts have
already been adjusted by FANUC at the time of delivery.
Adjustment items
Measuring
terminals
Standard
Adjusting methods
No.
Symbol
1
RV1
Velocity command
voltage level
CH13-0V
See subsection 1).
2
RV2
Velocity command
voltage offset
CH13-0V
See subsection 1).
3
RV3
Speed arrival detec¬
tion level
CH10-0V
See subsection 4).
4
RV4
Speed detection
level
CH9-0V
See subsection 5).
5
RV5
Torque limitation
level
6
RV6
Regenerative power
limitation
7
RV7
VF conversion
level (1)
CH23-0V
200 +2 kHz when
voltage is 10 V
between LM and OM.
8
RV8
Speed detection
CH18-0V
1.38 +0.03 V at
forward rotation of
motor in 45 rpm.
Number of
See subsection 2).
setting
See subsection 6).
3
divisions
circuit setting
9
RV9
Forward motor speed
adjustment
motor
revolutions
10
RV10
CH17-0V
Speed detection
offset
Lower than +1 V
when the spindle
stops
11
RV11
Reverse motion speed
Number of
adjustment
motor
.
See subsection 2).
revolutions
12
RV12
Velocity loop gain
13
RV13
Velocity loop offset
MODEL 1/2/small MODEL 3
MODEL 3ÿ12
MODEL 15ÿ22
MODEL 30, 40
3
divisions
Number of
spindle
revolutions
... A16B-1100-0080 ,
See subsection 3).
A16B-1100-0090ÿ0092
... A20B-1000-0690'v0693, A20B-0009-0530
...
. .. A20B-1000-0700 , 0701
A20B-0009-0534'U)539
161
v
0533
No
.
Standard
setting
Measuring
terminals
Symbol
Adjustment items
14
RV14
Load meter amplitude
adjustment
LM-OM
10 + 0.1 V at
acceleration
15
RV15
+5 V voltage adjust¬
+5V-0V
5 +0.05 V
Adjusting methods
ment
4
divisions
16
RV16
Regenerative voltage
limitation level
17
RV17
VF conversion
level (2)
CH32-0V
RA offset adjustment
CH5-0V
18
RV18
24.5 kHz
at input
AC 200 V
The rate of ON time
at CH7 waveform to
be 50%.
19
RV19
RB offset adjustment
CH6-0V
The rate of ON time
at CH8 waveform to
be 50%.
20
RV20
Soft start/stop time
0
divisions
constant adjustment
CH13-0V
The time constant
can be selected by
setting of short
pin Sll.
Short A side of Sll
0. 6ÿ8 sec.
Short B side of Sll
3.5ÿ40 sec.
Check waveform of
acceleration or
deceleration at
CHI 3 (VCMD).
...
...
21
RV25A . Current/voltage
detector offset
adjustment
CRU, CRV
IDC, VDC-0V
-D
(Note) How lo read the variable resistor scale
4
5
6
onoV7
3
2
1
0
9
10
162
-
0 +2.5 mV when
spindle stop
1) Velocity command voltage (RV1,RV2)
When the velocity command voltage is 10 V, the motor rotates at the rated
speed
.
Item
Measuring
terminal
Offset
CH13-0V
Give velocity command voltage 0 V (equivalent to S00)
after setting the motor to be ready for operation.
Adjust RV2 while alternately giving the forward rota¬
tion and reverse rotation commands, until the voltage
remains unchanged at measuring terminal. (Note)
Level
CH13-0V
Give the rated rotation command 10 V to the motor, and
adjust RV1 until the measuring terminal voltage becomes
+10 V +0.05 V when the spindle forward rotation command
Adjusting procedure
is sent.
Note) If the voltage at CH13 is +5.0 mV when the spindle rotates forward and
+5.0 mV +1.0 mV when the spindle rotates reversely, the offset error
becomes +1.0 mV when the velocity command voltage directions are inverted.
Voltage
+
X
Before
adjustment
After
X
< adjustment
Forward
rotation +8mV
--Reverse
rotation
Forward rotation
X — +5 mV
/
Reverse rotation
+2mV
0
2) Rotation speed adjustment (RV9, RV11)
The number of spindle revolutions can be finely adjusted according to the
following procedure.
Measure the number of spindle revolutions directly by using a stroboscope or
a tachometer.
Item
Measuring
terminal
Adjusting procedure
Number of
forward
revolu¬
tions
Spindle
Give the specified motor rotation command voltage.
Adjust RV9 so that the motor rotates at the specified
speed when the forward rotation (SFR) command is
given.
Number of
reverse
revolu¬
tions
Spindle
Adjust RV11 so that the motor rotates at the specified
speed when the reverse rotation (SRV) command is
given.
163
-
Note 1) In MODEL 1/2/small MODEL 3, adjust RV9A, 9B during forward rotation or
RV11A, 11B during reverse rotation according to the above procedure.
Note 2) The forward rotation means that the AC spindle motor rotates counter¬
clockwise as viewed from the motor shaft direction and this forward
rotation (SFR) does not always correspond to the forward rotation of the
machine tool spindle.
. Motor forward rotation
(SFR) direction
3) Velocity offset (RV13)
Adjust RV13 after completion of the previous adjustments so that the spindle
does not rotate at low speed when the velocity command voltage 0 V is given.
Item
Velocity
offset
Measuring
terminal
Spindle
(or
motor)
Adjusting procedure
Adjust RV13 so that the spindle does not rotate when
the velocity command voltage 0 V and either forward
or reverse rotation command are given.
4) Speed arrival detection level (RV3)
The speed arrival detection level can be set according to the following
The coordinate indicates percentage to the rated revolutions of
graph.
motor.
50
45
40
I
~
35
I 30
s
I£
25
20
15
I
10
Standard setting 15%
I- "
I
5
I
I
0
0
1
1
x
4
I I
2
3
X
i
x
5
6
7
1
8
i
9
RV3 scale divisions
Note) Now to read the variable resistor scale divisions.
3
*1.6 7
o
2
1
o
8
9
0
10
164
-
10
t
5) Speed detection level (RV4)
The coordinate indicates percentage to the rated revolutions of the motor.
This signal is used as a check signal when the clutch or gear is changed.
80
70
60
*JJ
50
f
40
6)
T3
•2
£
30
20
10
0
Standard setting 3%
1
0
1
1
2
3
1
1
1
4
6
5
RV4 scale divisions
_L
7
8
9
10
6) Torque limitation level (RV5)
The coordinate indicates percentage to the 30-minute rated torque.
60
When TLMH signal
is turned on;
o
I 50
"c
a
40
rA
30
1
When TLML signal
is turned on;
O
i
a
c
20
o
I
10
U-
o
0
±
1
2
Standard setting
3
i
i
4
5
[ TLML
i
6
RV5 scale divisions
165
TLMH 18%
10%
i
±
±
7
8
9
10
7) Soft start/stop time constant
In casE S 11:B
In case S11:A
/
10
/
/
/
/
/
/
9
/
40
8
<
7
a
8
.52
30
6
C/D
c/D
s
1
5
5
4
S
f
S
g
20
§
a
o
CJ
H
3
H
10
2
1
0
0
1
2
3
4
5
6
7
8
9
10
RV 20 scale division
Note) Soft start/stop time constant shows rising and falling time when set velocity
command voltage (VCMD) 0V to 10V or 10V to OV. Refer to next Figure.
10V
t
0V
I
Tr
Tf
Tr = Tf. Soft start/stop time constant
i
166
2) PCB for
POT
name
380/415 VAC input
Object of
adjustment
type
scale
Observation
terminals
Standard
Adjustment standard
RV1
Voltage command
voltage lebel
5.0
CH13
10 V +0.02 V at the rated
velocity command of SFR
RV2
Voltage command
voltage offset
5.0
CHI 3
Voltage difference = +1 mV at
zero velocity command of SFR
and SRV
RV3
Speed arrival
detection level
1.5 V
3.0
CH10
Variable from 0.5 to 5.0 V at
rated velocity of SFR and SRV
RV4
Speed detection
0.3 V
1.0
CH9
Variable from 0.15
Torque limiting
Output
value
torque
5ÿ25%
A specified torque L
of max torque, H -*ÿ 10ÿ50%
level
RV5
to
6.7 V
CH23
200 kHz +2 kHz PPS for 10.0 V
between LM-OM
Low velocity
detection level
CHI 8
-1.38V +0.03 V at velocity
command of 45 rpm for CHI 7
RV9
Velocity detection
level
Motor speed
Is rpm of rated velocity at
rated velocity command of SFR
RV10
Velocity detection
offset
CHI 7
+5 mV when spindle stops
RV12
Velocity loop gain
Motor
rotation
Be sure not to have over
RV7
ER VF conversion
ratio
RV8
7.0
5.0
shoot and hunting at high
speed
RV13
Velocity offset
Motor
rotation
Be sure not to rotate at zero
command of SFR
RV14
Calibration of
max. amplitude
LM-OM
10 V +0.1 V at deceleration
at acceleration (no torque
limit)
RV17
VF conversion
ratio of input
voltage
7.0
CH32
38 k +0.6 kpps at 380 VAC of
input voltage
RV18
RA offset
compensation
5.0
CH5
Specifics
with CN2
RV19
RB offset
5.0
CH6
Ditto
0.0
CH13
Variable from 0.6 to 8 sec at
S11=A or from 3.5 to 40 sec
at S11=B when V. command is
10 V
CN7/CH8 duty
to
50%
compensation
RV20
Ramp time of
velocity command
167
APPENDIX 9 CHECKING METHOD FOR PCB
1.
CHECK TERMINAL
For the mounting positions of check terminals, see mounting layout of parts in
PCB in Appendix 6.
A20B-1000-0690ÿ0693
a) MODEL 3ÿ12
15ÿ22
MODEL
A20B-0009-0530MJ593
MODEL 30, 40
A20B-1000-0700, 0701
...
...
...
Name of
Name of
terminal
signal
CHI
DA2
CH2
DAI
Remarks
Signal data
Analog command voltage
0
D/A
0
converter output
-
10. 0V
10. 0V
voltage
CH3
PA
Pulse generator output
A-phase
CH4
PB
Pulse generator output
B-phase
PA leads PB by 90° in CW rotation
CH5
RA
A-phase reference
voltage
PA DC +25mV
CH6
RB
B-phase reference
voltage
PB DC +25mV
CH7
PSA
A-phase squre wave
Duty 50% (at constant speed) +10%
CH8
PSB
B-phase square wave
Duty 50% (at constant speed) +10%
PSA leads PSB by 90° in CW
rotation
CH9
SDTRF
Speed detection level
Variable over a range of 0.14
-
7.4V by RV4
CH10
SARRF
Speed arrival level
CH11
BUZY
Acceleration/
Variable over a range of 0.5
5.0V by RV3
ii
deceleration in
progress
"0,(-
-
ii
I
+10. 0V
©
"1" level during
acc. /dec.
; CCW,
©
; CW
CH13
VCMD
Velocity command
voltage
0
CHI 4
RVP
Reverse rotation speed
level
Pulse width 3.2 s generated
during reverse rotation only
Pulse width 3.2 s generated
during forward rotation only
CH15
FWP
Forward rotation speed
level
CH16
OV
PCB 0V
168
-
Name of
Name of
terminal
signal
CH17
TS1
Remarks
Signal data
output
-8V at 6000 rpm in CCW (forward)
rotation
Velocity feedback
F/V
CH18
TS2
Low speed detection
signal
-1.38 +0. 03V at 45 rpm in CCW
(forward) rotation
CH20
TSA
Velocity feedback
signal
+10V at rated rotation speed and
(-) in CCW rotation.
CH21
LTRF
Output torque
Output =
limitation voltage
CH22
CRU
—(
.
C|V
| 1 8) / 10
CH21 +
x maximum output
Current/V
U-phase current
detection signal
M3. 6 M8 Ml 2 M15 M18 M22 M30 M40
16.7 25A 35. 750A 50A 62.! 52. 1104.2
A
A
A
A
A
-
0V is 10V,
CH23
ERP
VF conversion output
200 kHz when L
0.4ys width
CH24
CRV
V-phase current
detection signal
See CH22
CH25
TRWF
Triangular wave signal
CH26
CRW
W-phase current
detection signal
See CH22
CLK
CLK
Clock signal
312.5 kHz, 200 ns typ.
+24
24V
+24V power voltage
+15
15V
+15V power voltage
+5
5V
+5V power voltage
+5V jfl% (already adjusted by RV15)
0V
0V
PCB 0V
Same as the 0V and CHI 6
-15
-15V
-15V power voltage
-15V +4%
CH28
ER
Error voltage
0
CH29
UCM
U-phase command voltage
CH30
VCM
V-phase command voltage
CH31
WCM
W-phase command voltage
CH32
24VP
24 V VFC output
19A
19A
AC 19V input voltage
169
MM'U
-
lOVp-p
10V
For PCB control power supply
Name of
terminal
Name of
signal
Signal data
Remarks
CT
CT
OV
For PCB control power supply
19B
19B
AC 19V input voltage
For PCB control power supply
SLP
SLP
Slip frequency
Pulse width:
3.2ys
b) MODEL 1 /2/small MODEL 3
Name of
terminal
Name of
signal
CHI
DA2
CH2
DAI
Signal data
Remarks
Analog command voltage
0
D/A
0
converter output
-
10. OV
10. OV
voltage
CH3
PA
Pulse generator output
A-phase
CH4
PB
Pulse generator output
B-phase
PA leads PB by 90° in CW rotation
CH5
RA
A-phase reference
voltage
PA DC +25mV
CH6
RB
B-phase reference
voltage
PB DC +25mV
CH7
PSA
A-phase square wave
Duty 50% (at constant speed) +10%
CH8
PSB
B-phase square wave
Duty 50% (at constant speed) +10%
PSA leads PSB by 90° in CW
rotation
CH9
SDTRF
Speed detection level
Variable over a range of 0.14
7.4V by RV4
CH10
SARRF
Speed arrival level
Variable over a range of 0.5
5.0V by RV 3
CHI1
BUZY
Acceleration/
"O'1-
-
J
©
©
CH 13
VCMD
Velocity command
voltage
0
CHI 4
RVP
Reverse rotation speed
level
Pulse width 3.2 s generated
during reverse rotation only
Forward rotation speed
level
Pulse width 3.2 s generated
during forward rotation only
CH15
FWP
-
170
-
+10. 0V
-
"1" level during
acc. /dec.
»f
deceleration in
progress
-
; CCW,
; CW
Name of
Name of
terminal
signal
CHI 7
TS1
Remarks
Signal data
Velocity feedback
F/V
output
CH18
TS2
-8V at 6000 rpm in CCW (forward)
rotation
signal
-1.38 +0. 03V at 45 rpm in CCW
(forward) rotation
Low speed detection
CH20
TSA
Velocity feedback
signal
+10V at rated rotation speed and
T-) in CCW rotation.
CH21
LTRF
Output torque
Output =
limitation voltage
CH22
CRU
— ( C [ V CH21|
+
.
1 8) / 10
x maximum output
U-phase current
detection signal
Current /IV
M2
Ml
6.43A 12.86A
M3
12.86A
-
CH23
ERP
VF conversion output
200 kHz when L,,
width
CH24
CRV
V-phase current
detection signal
See CH22
CH25
TRWF
Triangular wave signal
CH26
CRW
W-phase current
detection signal
See CH22
CLK
CLK
Clock signal
312.5 kHz, 200 ns typ.
+24
24V
+24V power voltage
+15
15V
+15V power voltage
+5
5V
+5V power voltage
+5V +1% (already adjusted by RV15)
0V
0V
PCB 0V
Same as the 0V and CHI 6
-15
-15V
-15V power voltage
-15V +4%
CH28
ER
Error voltage
0
CH29
UCM
U-phase command voltage
CH30
VCM
V-phase command voltage
CH31
WCM
W-phase command voltage
CH32
24VP
24V VFC output
19A
19A
AC 19V input voltage
For PCB control power supply
CT
CT
0V
For PCB control power supply
171
MAO
-
0V is 10V, 0.4ps
10Vp-p
10V
Name of
Name of
terminal
signal
Signal data
Remarks
19B
19B
AC 19V input voltage
For PCB control power supply
SLP
SLP
Slip frequency
Pulse width:
CH33
VDCA
DC link voltage
detection signal
95V/1V
CH34
IDCA
D1 link current
detection signal
10.6A/1V (model 2/3),
5.3A/1V (model 1)
CH35
*INA
A-phase driver control
signal
CH36
*INB
B-phase driver control
signal
CH37
*INC
C-phase driver control
signal
CH38
*IND
D-phase driver control
signal
CH39
*INE
E-phase driver control
signal
CH40
*INF
F-phase driver control
signal
CH4 1
*REG
Regenerative circuit
3.2ps
driver control signal
CH42
*LMT
Over current /overvoltage
Driver circuit is turned off at
limit
56.25A or 420V.
CRU
CRU
U-phase current
detection
0.54V +7 % at 50A
CRV
CRV
V-phase current
detection
0.54V +7% at 50A
IDC
IDC
DC link current
detection signal
VDC
VDC
DC link voltage
172
-
c) 380
V/415
Name of
terminal
VAC input type
Name of
Remarks
Signal data
signal
- 10 V when external velocity
command is given.
CHI
DA2
Velocity command
voltage input
Is 0
CH2
DAI
DA conversion output
Is changeable by convertor input
10 V.
bit command of 0
voltage
CH3
PA
Pulse generator A-phase
Advances 90° against PB by CW
rotation for Vp-p = 0.36 - 0.
(5 V/2 +5%) +0.2 Vtyp.
CH4
PB
Pulse generator B-phase
Delays 90° against PA by CW
rotation for Vp-p = 0.36 - 0.5 V.
(5 V/2 +5%) +0.2 Vtyp.
CH5
RA
A-phase reference
voltage
DC part of PA.
(2.5 V +0.25 V)
CH6
RB
B-phase reference
voltage
DC part of PB.
(2.5 V +0.25 V)
CH7
PSA
A-phase rectangular
Pulse width duty 1/2,
256 pulses/1 motor rotation.
wave
CH8
CH9
PSB
SDTRF
wave
Pulse width duty 1/2,
256 pulses/1 motor rotation.
Velocity detection
reference voltage
Is variable in the range of 0.14
7.4 V/RV4. Standard setting is
B-phase rectangular
-
0.3 V.
CH10
CHI 1
SARRF
BUZY
-
Velocity arrival
reference voltage
Is variable in the range of 0.5
Adjustable velocity
45 sec typ. level "1" from the
step change of more than 1.4 V of
5.0 V/RV3 for velocity command of
10 V. (Standard: 1.5 V)
signal
velocity command.
CH12
TEST
C-short terminal for
integration
Is short-circuited at both ends of
condensor C68 when connected to
(0 V) terminal.
CH13
VCMD
Velocity command
voltage
For positive, motor is forward
(CCW) and for negative, reverse
(CW)
Rated velocity command is
.
+10 V.
CHI 4
RVP
Reverse velocity pulse
173
Occurs at reverse (CW) with pulse
width 3.2 ps and 1024 pulses/
1 motor rotation.
Name of
terminal
Name of
signal
Signal data
Remarks
CH15
FWP
Forward velocity pulse
Occurs at forward (CCW) with pulse
width 3.2 ys and 1024 pulses/
1 motor rotation.
CH17
TA1
Velocity FVC output
Is 10 V for forward 6000 rpm.
CH18
TS2
Low speed detection
signal
Is -1.38 +0.03 V for forward
45 rpm.
CHI 9
VLER
Velocity deviation
compensating signal
Negative voltage for CCW and
positive for CW.
CH20
TSA
Velocity detection
signal
+10 V (for CCW) at rated rotation
speed
CH21
LTRF
Torque limiting
reference voltage
Limited output = C C
x max. output, (-8.2 V)
CH22
CRU
U-phase current
detection signal
CURRENT =
.
| VCH-? L |+1.8) / 10]
RCD
CH23
ERP
CH24
CRV
VCH22ÿ6
X
RCDÿA
M40, M30
3 mfi
Error VF conversion
output
200 kHz and pulse width
for CH28 (ER).
V-phase current
Refer to CH22.
ys
detection signal
CH25
TRWF
Triangular wave for PWM
reference
1.50025 kHz, 10 Vpp typ.
CH26
CRW
W-phase current
detection signal
Refer to CH22.
CH28
ER
Error (or weakening)
0
-
10 V (max. output at 10 V)
voltage
.
CH29
IUCMD
U-phase command voltage
Sine-wave
CH30
IVCMD
V-phase command voltage
Lags 120° against CH29 (UCM) for
CCW.
CH3 1
IWCMD
W-phase command voltage
Lags 240° against CH29 (UCM) for
CCW.
CH32
*IVP
Input voltage FVC
output
Is 38 kHz for input line voltage
380 V.
Slip pulse
Pulse width 3.2 ys.
SLP
SLP
-
174
-
Name of
terminal
Name of
signal
Remarks
Signal data
ARS
ARS
Alarm reset terminal
Is this tei'minal is command to (0)
terminal alarm is ignored and
"ENABLE" is set.
CLK
CLK
Clock signal
312.5 kHz and pulse width 200 ns.
+24
24 V
+24 V voltage source
+20 V +0.2 V.
+15
15 V
+15 V voltage source
+15 V +0.15 V.
+5
5 V
+5 V voltage source
+5 V +0.05 V.
0 V
0 V
P.C.B. reference
voltage
-15
-15 V
-15 V voltage source
175
-15 V +0.15 V.
2.
CHECK TERMINAL DATA CONFIRMATION METHOD
Terminal
Voltage check by a
circuit tester or the
like, or frequency
check by a counter or
the like
CHI
0 - +10V by velocity
command voltage input
CH2
0 - +10V by velocity
command
Waveform
check during
stop
CH3
CH4
CH5
CH6
CH7
CH8
Waveform
check during
low-speed
rotation
acceleration/
deceleration
See (2)
CH9
0.3V by standard
adjustment
CH10
1.5V (standard) when
velocity command
voltage is 10V
CHI 1
CH13
Waveform
check during
See (3)
-
0
+10V by velocity
command voltage input
CH14
CHI 5
See (2)
CHI 7
CH18
+1.38 +0.03V at motor
rotation +4.5 rpm
See (3)
CHI 9
CH20
0
-
+10V by rotation speed
CH28
CH2 1
Standard -8.2V (during
low-speed rotation)
CH22
CH24
CH26
CH29
CH30
CH3 1
CH23
See (2)
SLP
176
-
Terminal
Voltage check by a
circuit tester or the
like, or frequency
check by a counter or
the like
CH25
Waveform
check during
stop
Waveform
check during
Waveform
check during
low-speed
acceleration/
rotation
deceleration
See (1)
CLK
At AC 200V input,
+24
+24.7 +1V
+15
+15.0 +0. 45V
+5
+
-15
-15.0 +0. 45V
19A
CT
19B
CH32
5.0 +0. 05V
AC 19V at AC200V
between 19A and
AC19V at AC200V
between 19B and
24kHz
input
CT
input
CT
at AC200V input
1) Waveform at stopping
Check
Remarks
Waveform
terminal
CLK
Typ
•"2 00ns
2.4V or more
Ov
Typ 3.2/JS
CH25
Ov
10 Vp—p
333/is
177
2) Waveform during low speed
Condition: Motor rpm. 45M000 rpm
Spindle reverse rotation command signal SRV ON
Check
terminal
Waveform
CH3
CH4
CH3
/
Remarks
CH4
i
Vp-p
about
25V
03 6~ 0.5V
0v
CH5
CH6
2.5 ± 05 V
0
CH7
CH8
+5V
CH7
.1
+5V
r
CHB
0
CHI 4
CH15
CH14
When spindle rotation
direction is reverse,
waveform appears at CH15
and not appears at CH14.
CHI 5
If spindle rotation
direction is reverse,
phase of CH24 and CH26
are replaced.
CH22
CH24
Set the ON/OFF duty of CH7
and CH8 waveform 1 to 1 by
RV18 and RV19 at 1000 rpm.
\/\
CH26
-
178
-
Check
terminal
Remarks
Waveform
CH29
Ov
CH30
Ov
Ov
CH31
+ 5V
CH23
Ov
SLP
If spindle rotation
direction is reverse,
phase of CH30 and CH31
are replaced.
Frequency is in proportion
to spindle rotation.
When unit and motor is
normal, Sine-wave appears
at check point.
Pulse number are changed
in proportion to voltage
of CH28 terminal.
+ 5V
Ov
3) Waveform during acceleration/deceleration
Conditions: Motor revolutions 0 -»ÿ 1000 rpm
0 rpm
Spindle reverse rotation command signal (SRV) OFF
Check
terminal
Remarks
Waveform
ov
CH13
ov
-2.2 V
1000 rpm
+2.2V
CH20
ov
CHI 1
“fI
OV
About
1 0 sec.
About
10 sec.
L
1000 rpm
+1.33V
CHI 7
0V
+14V
‘ A
CH18
ov
ON
\
179
OFF
Check
terminal
Waveform
CHI 9
Remarks
+ 14V
jiTi
I
-14V
CH28
ov
3.
-|ÿ+10V
J
I
\+5-6V
DIGITAL AC SPINDLE (Model 3 to 22)
3.1 Check Terminal
Table 9.3.1 Check terminal (digital spindle)
Name of
Signal data
terminal
Remarks
0
-
+10 V
Analog command voltage
0
-
+10 V
PA
Pulse generator output A-phase
PA leads PB by 90° in CW
rotation
PB
Pulse generator output B-phase
PB leads PA by
rotation
RA
A-phase reference voltage
+2.5 V
RB
B-phase reference voltage
+2.5 V
PAP
A-phase square wave
Duty = 50%
PBP
B-phase square wave
Duty = 50%
PAS
A-phase signal
Waveform of the signal PA 10
times amplified when based
on RA
PBS
B-phase signal
Waveform of the signal PB 10
times amplified when based
on PR
TS1F
Forward rotation speed detection
signal
+0.82 V at 6000 rpm in CCW
Reverse rotation speed detection
+0.82 V at 6000 rpm in CW
(reverse) rotation
DAI
D/A
DA2
TS1R
converter output voltage
signal
180
90° in CW
(forward) rotation
Name of
Remarks
Signal data
terminal
at 22.5 rpm in CW
(forward) rotation
TS2
Low speed detection signal
+1.4 V
TS3
Velocity pulse F/V signal
-4.65V
-6.15 V at 6000 rpm
in CCW (forward) rotation
VCMD
Velocity command voltage
0
FWP
Forward rotation speed pulse
Pulse width 3.2 ps generated
during forward rotation only
RVP
Reverse rotation speed pulse
Pulse width 3.2 ps generated
during reverse rotation only
ER
Error voltage
-4.2 V
CLK1
Clock signal
2.5 MHz, Duty = 50%
SLIP
Slip pulse
VDC
DC link voltage signal
ADIN
AC converter input signal
IU
U phase current signal
-
-
+10 V, +: CCW
-
-: CW
+4.8 V
Signal devided by 100 of DC
link voltage
Model
3/6
Value of 22
IV
V phase current signal
IW
W phase current signal
+24
+24 V
+15
+15 V
+15 V
+5
+5 V
+5 V
-15
-15 V
-15 V
0 V
0 V
0 V
8 12 15/18 22
83
33 48 67
current
Unit:
181
A/V
3.2 Waveform at Check Terminal
Check
terminal
Waveform
PA
PB
Remarks
i
l
PA
Vp-p
About 2.5 V
PB
0.36 -0.5 V
0
RA
2.5 ± 0.2 V
RB
0
+5 V
PAP
0V
+5 V
PAP
PBP
PBF
0V
PAS
PAS
2.5 V
PBS
0V
PBS
3.6 V5.0 V
FWP
When spindle rotation
direction is forward.
The waveform appears at
RVP and not appears at FWP
in reverse rotation.
FWP
RVP
RVP
182
(
Check
terminal
Remarks
Waveform
0V
VCMD
-10 V
+10 V
TSA
0V
+0.8 V
0V
TS1R
+14 V
TS2
0V
+5.0 V
TS3
0V
+4.8 V
/
ER
0V
-4.2 V
IU
0V
IV
0V
IW
0V
2.5 MHz
200ns
CLK1
1
200ns
4V
OV
—
400ns
183
4.
DIGITAL AC SPINDLE (Model IS, 1.5S, 2S, 3S, 2H, 2VH)
4.1 Check Terminal Table
Check
terminal
Signal data
Remarks
- +10
DA2
Analog speed command voltage
0
PA
Pulse generator output phase A
90° leading from PB at CW
rotation
PB
Pulse generator output phase B
90° leading from PA at CW
rotation
RA
Phase A reference voltage
+2.5 V
RB
Phase B reference voltage
+2.5 V
PAP
Phase A square wave
Duty = 50%
PBP
Phase B square wave
Duty = 50%
TSA
Speed detecting signal
+10 V at rated maximum speed
V
rpm
TS2
Low speed detecting signal
TS3
Speed pulse
VCMD
Velocity command voltage
0 = +10 V, +: CCW,
FWP
Forward rotation speed pulse
Pulse width = 3.2 ys ,
produced only at forward
rotation
RVP
Reverse rotation speed pulse
Pulse width = 3.2 ys,
produced only at reverse
rotation
ER
Error voltage
-4.2 V
CLK1
Clock signal
2.5 MHz, Duty = 50%
SLIP
Slip pulse
VDC
DC link voltage signal
signal of DC link
voltage
DTDC
DC voltage of input AC voltage
1/100
F/V
Adjusted by RV6 according to
the model
signal
-4.65
-
6.15 V at CCW
(forward rotation) 6000 rpm
-
CW
+4.8 V
1/100
184
signal of DC voltage of
input AC voltage
Check
terminal
Remarks
Signal data
IU
Phase U current signal
IV
Phase V current signal
IW
Phase W current signal
+24
+24 V
+2 A V
+15
+15 V
+15 V
+5
+5 V
+5 V
-15
-15 V
-15 V
OV
0 V
0 V
SM
Signal for speedmeter
Rated maximum speed +10 V
LM
Signal for load meter
+10 V at maximum output
Current value 22.2
4.2 Waveform of Check Terminal
Check
terminal
PB
PA
L
i
L
PA
Vp-p
About 2.5 V
PB
Remarks
Waveform
T
0.36
- 0.5 V
0
RA
2.5 ± 0.2 V
RB
0
+5 V
PAP
PAP
0V
+5 V
PBP
PBP
0V
185
A/V
Check
terminal
Waveform
Remarks
0V
VCMD
-10 V
+10 V
TSA
0V
+14 V
TS2
0V
+5.0 V
TS3
0V
w
i
-
+4.8 V
\
/
ER
0V
-4.2 V
*
'
IU
0V
IV
0V
IW
0V
2.5 MHz
200ns
1
200ns
4V
CLK1
0V
—
400ns
VI
I
i
-
186
-
APPENDIX 10 MAGNETIC SENSOR SIGNALS CHECKING METHOD
1.
APPLICATION
This document applies to the following check procedure by observing output
signals of the magnetic sensor (specification: A57L-0001-0037) employed for
magnetic sensor system spindle orientation.
Check item
Item
1
2
Whether magnetizer, magnetic sensor head, and magnetic sensor amplifier
are defective or not.
Whether magnetizer and magnetic sensor head are properly mounted or
not;
3
2.
Whether magnetic sensor signal cables are properly connected without
any connection failure and short-circuit.
CHECK PROCEDURE
1) Preparation
(T) Rotate the spindle at about 120rpm. Select the counterclockwise rotating
direction as viewed from the AC spindle motor shaft (in such a direction
as the voltage at check terminal CH13 (VCMD) of AC spindle control
circuit PCB becomes positive (+) to CH16 (OV)).
Note) MODEL 1, 2, small MODEL 3
A16B-1100-0080, -0090ÿ0092
A20B-1000-06 90ÿ0693
MODEL 3M2
MODEL 15ÿ22
A20B-0009-05 34ÿ0539
MODEL 30, 40
A20B- 1000-0700ÿ0701
(2) Check the peak voltage and offset voltage levels of the following signal
waveforms at the check terminals of the orientation circuit (drawing:
A20B-0008-0030ÿ1 or A20B-0009-0520) using an oscilloscope.
The names of
check terminals and signal contents are common, irrespective of the kinds
of orientation circuit.
...
...
...
...
Check terminal
Signal name
Symbol
No.
CHI
Magnetic sensor output singal A
MSA
CH2
Magnetic sensor output signal B
LSA
Prove common
terminal
(0V)
187
_ --_
2) Decision method
1 Examples of normal waveforms and their criteria are as shown below.
If a trouble occurred, refer to the causes and remedy shown in the
following table.
—
[Normal waveform]
U* Spindle
T
_ L_!
CHI
— I [MSA]
i
I
i_
I
-J
I
I
I .
CH2
I
t
[LSA] I
<
I
I
Rotation-ÿ
I
!
_L
i
[Definition of symbol]
j
MSA
Vol
V_
-U--
4
Vp2
1
-t-
. trr
JV/DIV.
LSA
Vo2
Vp3
-r -
f,TO)
J
|
!
—
OV
-f
0.1 SEC/DIV.
-*T
(Criteria table)
Item
Criteria (normal, if these conditions are satisfied.)
Offset voltage
Peak voltage
2
V
,
olv2
3V < V
plv2
< 0.5V
10V
Remedy to be observed when the above criteria are not satisfied.
Item
Symptoms
Causes
Remedy
1
Offset voltage of
a. Magnetic sensor head Replace defective
or magnetic sensor
either or both signals
parts.
amplifier is
is high. Offset voltage
defective.
is normal.
Peak voltage of either
signal only is low.
2
Waveform of either
signal does not
appear, or waveform
of both signals don't
appear.
a. Magnetic sensor
head, amplifier, or
magnetic sensor
amplifier is
connectors
Offset voltage is
normal, but the
entire peak voltage is
low.
parts.
defective.
b. Poor connection or
short-circuit of
cables or
3
a. Replace -defective
-
parts.
.
a. Mounting gap of the
magnetic sensor head
and the magnetizer
is wider than
specified.
188
b. Repair defective
Readjust the gap.
Item
4
Symptoms
Causes
Remedy
Offset voltage and
peak voltage levels
are normal, but
waveforms are
different from
specified ones.
Observe the following procedure according to
waveforms
Obser¬
vation
wareform
a. Magnetic sensor head
is not mounted
CHI
MSA
A
V
-+T
CH2
LSA
CHI
MSA
CHI
CH2
LSA
properly.
b. Wrong cable
connection.
a. Magnetizer is not
properly mounted.
A
X7
-»T
CH2
LSA
MSA
.
b. Wrong cable
connection.
/\
V
n
-*T
a. Magnetizer and
magnetic sensor head
are not properly
mounted
.
b. Wrong cable
connection.
a. Reverse the pin
groove direction of
the magnetic sensor
head.
b. Replace LSA and LSB
with each other.
a. Reverse the
direction of the
reference hole of
magnetizer.
b. Replace MSA and MSB
with each other.
Replace LSA and LSB
with each other.
a. Reverse the mounting
directions of both
magnetizer and
magnetic sensor
head.
b. Replace MSA and MSB
with each other.
Reference) For normal mounting methods and connection methods of signal cables
of the magnetizer and magnetic sensor head, refer to 7.3.1 in text
and appendix 1 "Connections".
189
-
APPENDIX 11.
PARAMETER LIST FOR DIGITAL AC SPINDLE SERVO UNIT
1) MODEL 3 to 22
Mode
Standard
setting
Contents
F-00
Display of rotation number of motor
F-01
Use/non-use
of machine ready signal (MRDY)
Use
1
1
Non-use: 1
F-02
F-03
Use/non-use of
override function
Setting of override range
Use
1
Non-use
1
120% : 1
1
>
1
100% : 0
F-04
Setting of velocity
command voltage
Use of external analog command: 0
Use of DA converter
F-05
F-06
High speed
specification
Setting
-
5000 rpm
-
10000 rpm
0
-
6000 rpm
-
12000 rpm
1
15000 rpm
2
-
20000 rpm
3
Pattern setting of output limit
Setting
No output limiting made
0
Output limit is made only at
acceleration /deceleration
1
Output limit is made only at
normal rotation, not at
acceleration /deceleration
2
Output limit is made for all
operations
3
Setting of limit value at
Based on
the motor
specifi¬
cation
0
Contents
F-07
: 1
Setting of maximum rotation number
Standard
specification
0
Rated maximum output is 100
output limit
190
-
100
Data
Mode
Standard
setting
Contents
F-08
Setting of delay time before shut-off of motor power
Delay time = (Set value) x 40 msec.
F-09
Use/non-use of shut-off of motor power by
machine ready signal (MRDY)
5
: 1
Use
0
Non-use: 0
F-10
Velocity deviation offset adjustment at forward rotation
command (SFR)
128
F-ll
Velocity deviation offset adjustment at reverse rotation
command (SRV)
128
F-12
Velocity deviation offset adjustment at orientation
command (OCR)
128
F-13
Rotation number adjustment at forward rotation
F-14
Rotation number adjustment at reverse rotation
F-15
Rotation number at velocity command voltage, 10 V
Rotation number = (Set value) x 100 rpm
F-16
Detection range of velocity arrival signal
Detection range = Within +(£>et value) % of command
rotation number
F- 17
Detection level of velocity detection signal
Detection range = Less than (Set value) % of maximum
rotation number
F-18
Setting of torque limit value
Torque limit value = Less than (Set value) % of maximum
Based on
the motor
specifi¬
cation
15
3
50
output
acceleration/deceleration
F-19
Setting of time needed for
Time = (Set value) sec.
F-20
Setting
Limiting of regenerated power
(Adjustment of deceleration time), range
F-21
Setting of velocity
control phase compensation P:
HIGH gear (CTH = 1)
Setting of velocity
control phase compensation P:
LOW gear (CTH = 0)
F-22
_
100
10
60
50
50
F-23
Setting of velocity control phase
compensation P at orientation: HIGH gear
100
F-24
Setting of velocity control phase
compensation P at orientation: LOW gear
100
191
Data
Mode
Standard
setting
Contents
F-25
Setting of velocity control
phase compensation I: HIGH gear (CTH = 1)
30
F-26
Setting of velocity control
phase compensation I: LOW gear (CTH = 0)
30
F-27
Setting of velocity control phase
compensation I at orientation: HIGH gear
30
F-28
Setting of velocity control phase
compensation I at orientation: LOW gear
30
F-29
Adjustment of velocity detection offset (adjusted at
shipping)
F-30
Adjustment of rotation number display (adjusted
shipping)
at
Approx.
128
Approx.
3990
F-31
Setting of rigid tap mode
F-32
Setting of normal motor voltage
10
F-33
Setting of motor voltage at orientation
10
F-34
Setting of motor voltage at rigid tap mode
F-35
Setting of speed zero signal detection level
detection level = less than {max. number of revolution
x (Setting data/100)%}
0
192
100
75
Data
2) MODEL IS, 1.5S, 2S, 3S, 2H, 2VH
Standard
setting
Contents
Mode
F-00
Speed indication of motor
F-01
The use/no use of the machine ready signal
(MRDY)
:
1
No use:
0
Use
1
F-01
to
Not used
F-05
F-06
0
Pattern setting of output limit
Setting
Pattern 1 Pattern 2
Contents
The output is not limited
The output is limited
only at acceleration and
deceleration
No output is limited at
acceleration and decele¬
ration but it is limited
only during steady
0
0
1
4
2
5
3
6
_
rotation
_
The output is limited
over all movements
F-07
Limit value setting when
the output is limited
F-08
Setting of delay time to motor power interruption
Delay time = (Setting value) x 40 msec
F-09
Use or no use of motor power interruption by
machine ready signal MRDY
100
Maximum rated output is
made 100
5
:
1
No use:
0
Use
0
F-10
Speed error offset adjustment at the time of the forward
rotation command (SFR)
128
F— 11
Speed error offset adjustment at the time of the reverse
rotation command (SRV)
128
F-12
Speed error offset adjustment at the time of the
orientation command (ORCM)
128
F-13
Not used
(The speed rpm should be adjusted, using RV1 and 2 in
reference with item 4.5.)
to
F-14
F-15
Speed rpm at 10 V speed command voltage
(Speed rpm = (preset value) x 100 rpm)
193
-
Data
Mode
Standard
setting
Contents
F-16
Detection range of speed arrival signal:
Detection range = within +(preset value)% of command
speed rpm
F-17
Detection level of speed detecting signal:
Detection range = Less than (preset value) % of maximum
15
3
speed
F-18
Setting of torque limit value:
Torque limit value = Less than (preset value)% of
maximum output
50
F-19
Setting of time for acceleration/deceleration
Time = (Setting value) sec.
10
F-20
Limit of regenerative power
(Adjustment of deceleration time)
F-21
Setting of velocity control phase compensation P:
HIGH gear (CTH = 1)
20
F-22
Setting of velocity control phase compensation P:
LOW gear (CTH = 0)
20
F-23
Setting of velocity control phase compensation P is
orientation time: HIGH gear
40
F-24
Setting of. velocity control phase compensation P in
orientation time LOW gear
40
F-25
Setting of velocity control phase compensation I:
HIGH gear (CTH = 1)
10
F-26
Setting of velocity control phase compensation I:
LOW gear (CTH = 0)
10
F-27
Setting of velocity control phase compensation I in
orientation time: HIGH gear
F-28
Setting of velocity control phase compensation I in
orientation time: LOW gear
F-29
F-30
Not used
(The adjustment of the speed detection offset is
explained in item 4.5. Please adjust by RV3)
F-3 1
Setting of rigid tap mode
F-3 2
Setting of usual motor voltage
10
F-33
Setting of motor voltage in orientation time
10
F-34
Setting of motor voltage of rigid tap mode
Setting
= Q
range
60
100
.
10
10
0
- 194
-
100
Data
Mode
F-35
F-36
Standard
setting
Contents
0 speed signal detection level:
Detection range = Less than (Preset value/100)% of
maximum speed
75
Load detection signal level:
90
Detection range = Less than (Preset value/100)% of
maximum output
195
Data
J
Revision Record
FANUC AC SPINDLE SERVO UNIT MAINTENANCE MANUAL (B-53425E)
05
04
1, ’84
11, ’83
Adding of small type servo unit (A06B-6044-H108,
HI 12) for motor MODEL 8 and 12.
All contents are changed.
09
3, ’87
Adding of Digital AC spindle servo unit MODEL IS,
•1.5S.2S,
3S, 2H, 2VH.
Adding
of
•servo unit. 380V/415V AC input type AC spindle
•Adding parameter F 35
03
8, ’82
All contents are changed.
08
11, ’86
Adding of check terminal table and waveform at
•check
terminal for digital spindle.
•Adding digital AC spindle servo unit.
02
01
Edition
11, ’81
Correction of errata
07
9, ’81
Date
Contents
8, ’86
06
6, ’85
Edition
Date
Adding the contents of AC spindle motor
•model
1, 2, 30, 40.
Adding the contents of AC spindle servo
•unit
model 1, 2, small model 3, 30, 40.
Contents
!
!