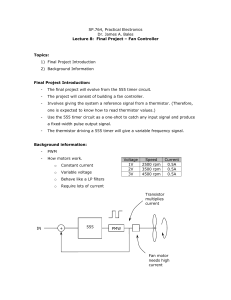
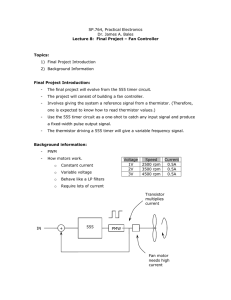
EXPERIMENT – 2 THREE PHASE RECTIFIER FED DC SEPARATELY EXCITED MOTOR 2.1 AIM: To construct a three phase fully controlled full wave bridge rectifier and to control speed of the DC motor. 2.2 APPARATUS: 415V input 185V output or any suitable isolation transformer, controlled rectifier module, firing unit, DC shunt motor, patch cards etc. 2.3 CIRCUIT DIAGRAM: Fig - 2.1 Three Phase Input Thyristorised Drive for Dc Motor with Closed Loop Control 2.4 PROCEDURE: 1. Connect motor terminals (field & armature) to respective points in the power circuit & speed sensor to feedback terminals socket. 2. Circuit connections are made as shown in the circuit diagram using 3 phase auto transformer. 3. Connect 3 pin power cards from power unit (rectifier) to the mains supply. 4. Switch on the field supply of the motor. 5. Keeping PID switches at ON position, keep all knobs at minimum position now switch on the firing unit. 8|Page 6. Switch on the three phase power input. Switch on the power circuit through MCB. 7. Adjust the gains of PID knobs. 8. Set the rpm through the knob slowly (say 800 rpm). Increase auto transformer voltage slowly. 9. Load the motor up to 3 Amp load. Note down the speed for different loads. 10. Release the load slowly. Bring the set rpm knob to minimum position slowly & all the knobs at minimum position. Reduce auto transformer voltage to zero. 11. Switch off power circuit by MCB, switch off firing circuit, switch off field supply & remove the connections. 2.5 TABULAR COLUMN: Set RPM = 800 rpm(Say) S.No. Firing Angle Speed 1. 2. 3. 4. 5. 6. Note: Field supply must be switched on before applying voltage to armature. 2.6 RESULT: 2.7 PRE LAB VIVA QUESTIONS: 1 What is the difference between open loop and closed loop control? 2 What is mean by 3phase isolating transformer? 3 What are the types of transformers? 4 What is the difference between DC Motor and DC Generator? 5 What is mean by 3phase MCB? 9|Page 2.8 POST LAB VIVA QUESTIONS: 1 What is the advantage of Thyristorised control unit? 2 What is advantage of 3phase isolating transformer? 3 What is the torque equation of DC Motor? 4 What is the difference between field and armature windings? 5 What is the differences between separately and self excited dc motors? 10 | P a g e EXPERIMENT – 3 SPEED MEASUREMENT & CLOSED LOOP CONTROL OF PMDC MOTOR 3.1 AIM: To Construct chopper drive circuit and to control the speed of the PMDC motor. 3.2 APPARATUS: Chopper PMDC motor control module, DC power supply 30V / 1A, CRO, patch cards, etc. 3.3 CIRCUIT DIAGRAM: Fig – 3.1 Speed Measurement and Closed Loop Control of PMDC Motor Using MOSFET / IGBT Chopper Drive 3.4 PROCEDURE: 1. Connect motor terminals to respective points in the power circuit & speed sensor to feedback terminals socket. Connect the voltmeter & ammeter to the respective points. 2. Circuit connections are made as shown in the circuit diagram. 3. Check the connections and conform the connections made are correct before switching on mains supply & DC power supply. 4. Connect suitable DC regulated voltage using regulated power supply 30V/1A. 5. Keeping all the knobs at minimum position switch on the DC power supply adjust the DC voltage to say 12V. 6. Keeping PID switches ON (down ward) position. 7. Switch on the POWER supply switch. 8. Set the rpm to suitable value through the knob SET RPM (say 1000rpm). 9. Using P, I, D knobs adjust the running rpm to set rpm by varying P gain, I timing, D gain. 10. Load the motor up to 250 grams load in steps of 50 grams. Note down the speed for different 11 | P a g e 11. Loads. Observe the current & voltage waveforms using CRO. 12. Slowly reduce the DC voltage to zero switches off the unit, DC power supply & remove the connections. Note: While changing the set rpm vary the knob slowly. 3.5 TABULAR COLUMN: S. No Load in grms Running rpm 1 2 3 4 3.6 RESULT: 3.7 PRE LAB VIVA QUESTIONS: 1. What is the function of PMDC MOTOR? 2. What is the function of MOSFET and IGBT? 3. What are the advantages of CRO? 4. What are the characteristics of Diode? 3.8 POST LAB QUESTIONS: 1. What are the advantages of MOSFET and IGBT? 2. What is the function of PID controller? 3. What are the applications of PMDC Motor? 12 | P a g e EXPERIMENT – 4 FOUR QUADRANT CHOPPER DRIVE 4.1 AIM: To Construct closed loop chopper drive circuit and to control the speed of the dc motor 4.2 APPARATUS: Four quadrant chopper unit, 12V DC motor with speed sensor, CRO, patch cards, etc. 4.3 CIRCUIT DIAGRAM AND EXPECTED GRAPHS: Fig 4.1 Closed Loop Control of DC Motor Using Four Quadrant Chopper 4.4 PROCEDURE: 1. Connect motor terminals to respective points in the power circuit & speed sensor to feedback terminals socket. Connect the voltmeter & ammeter to the respective points. 2. Circuit connections are made as shown in the circuit diagram. 3. Connect suitable DC voltage using regulated 30V/1A power supply. 4. Check the connections and conform the connections made are correct before switching on mains supply & DC power supply. 5. Keeping all the knobs at minimum position switch on the DC power supply adjust the DC voltage to say 12V. 6. Keeping PID switches ON position. 7. Keep the FM/RM switch to upward position for forward rotation. 8. Set the rpm to suitable value through the knob (with in 1000 rpm). 9. Using P, I, D knobs adjust the running rpm to set rpm. 10. Load the motor up to 250 grms load in steps of 50 grams.. Note down the speed for different loads. Observe the current & voltage waveforms using CRO four chopper operations 11. Slowly reduce the DC voltage to zero. Change the FM/RM switch to downward position, do the above procedure for the reverse rotation. Note: While changing the set rpm vary the knob slowly. 13 | P a g e 4.5 TABULAR COLUM Forward Rotation: During this mode chopper is operating in I quadrant (I & V are positive) however chopper is made to jump to IV quadrant momentarily. Therefore in forward motoring current is always positive but voltage may be positive or negative. In this way chopper operated in I and IV quadrants. Set RPM= S. No Load in grms Running rpm 1. 2. 3. 4. 5. 4.6 REVERSE ROTATION: During this mode chopper is operating in III quadrant (I & V are negative) however chopper is made to jump to II quadrant momentarily. Therefore in reverse motoring current is always negative but voltage may be positive or negative. In this way chopper operated in III and II quadrants. Set RPM= S. No Load in grms Running rpm 1. 2. 3. 4. 4.7 RESULT: 4.8 PRE LAB VIVA QUESTIONS: 1. What are choppers? 2. What does a chopper consist of? 3. On what basis choppers are classified in quadrant configurations? 4. What is different control strategies found in choppers? 5. Explain the principle of operation of a chopper? 14 | P a g e 4.9 POST LAB VIVA QUESTIONS: 1. Define duty cycle. 2. How can ripple current be controlled? 3. What is step up chopper? 4. On what does the commutating capacitor value depend on? 5. What are the disadvantages of choppers? 6. How do they have high efficiency? 15 | P a g e