1
Introduction
Consider the following integral theorems we have used in this course:
The Fundamental Theorem of Calculus:
Z b
f 0 (x) dx = f (b) − f (a)
a
The Fundamental Theorem for Line Integrals:
Z b
∇f (r(t)) · r0 (t) dt = f (r(b)) − f (r(a))
a
Green’s Theorem:
ZZ D
∂Q ∂P
−
∂x
∂y
Z
dA =
P dx + Q dy
C
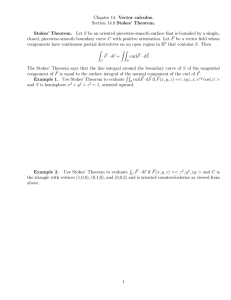
Stokes’ Theorem:
ZZ
Z
curl F · dS =
S
F · dr
C
The Divergence Theorem:
ZZZ
ZZ
F · dS
div F dV =
E
S
All these theorems relate the integral of an expression involving derivatives to an integral
over a lower-dimensional set. (In the case of the first two theorems, think of plugging points
into a function as integrating that function over a 0-dimensional set.) Using the language
of differential forms, we will see that these theorems are special cases of a single theorem
valid in higher dimensions.
Johns Hopkins University, CTYOnline
2
Differential Forms
Differential Forms on R3
Differential forms may be defined on Rn for any n ≥ 1, but in this note we generally focus
on the case n = 3.
Definition: A differential form on R3 is an expression involving scalar functions and the
differentials dx, dy, and dz of one of the four types below.
0-form:
f (x, y, z)
1-form:
P (x, y, z) dx + Q(x, y, z) dy + R(x, y, z) dz
2-form:
P (x, y, z) dy dz + Q(x, y, z) dz dx + R(x, y, z) dx dy
3-form:
f (x, y, z) dx dy dz
Note that f (x, y, z), P (x, y, z), Q(x, y, z), and R(x, y, z) are scalar functions. Depending on
the context, we will often require that these functions be differentiable, twice differentiable,
etc., but will usually not explicitly say so.
Example: x2 + yz is a differential 0-form, a scalar function.
Example: xy dx + sin(x + z) dz is a differential 1-form.
Example: (x2 + y 2 + z 2 )−3/2 dx dy dz is a differential 3-form defined for (x, y, z) 6= (0, 0, 0).
2.1
Operations on Differential Forms
Differential forms may be added, subtracted, multiplied, differentiated, and integrated.
2.1.1
Addition and Subtraction
Two or more k-forms may be added or subtracted by collecting like terms.
Example: (2x dx − xy dz) + (dy + 2z dz) = 2x dx + dy + (2z − xy) dz
2
Johns Hopkins University, CTYOnline
2.1.2
Differential Forms
Multiplication
The product f ω of a 0-form f and a k-form ω may be defined in the obvious way.
Example: If f (x, y, z) = x2 and ω = y dx − z dy, then the product of f and ω is
f ω = x2 (y dx − z dy)
= x2 y dx − x2 z dy
A general multiplication operation for differential forms is given by the wedge product:
Definition: The wedge product of a k-form ω and an l-form η (with 0 ≤ k + l ≤ 3) is a
(k + l)-form ω ∧ η. The wedge product satisfies the following properties:
(1) (Distributivity) If ω1 and ω2 are k-forms and η is an l-form, then
(ω1 + ω2 ) ∧ η = ω1 ∧ η + ω2 ∧ η
(2) (Anticommutativity) If ω is a k-form and η is an l-form, then
ω ∧ η = (−1)kl (η ∧ ω)
(3) (Associativity) If ω1 , ω2 , ω3 are k1 -, k2 -, and k3 -forms, respectively, then
(ω1 ∧ ω2 ) ∧ ω3 = ω1 ∧ (ω2 ∧ ω3 )
(4) If f is a 0-form, ω is a k-form, and η is an l-form, then
(f ω) ∧ η = ω ∧ (f η) = f (ω ∧ η)
(5) If ω is a k-form, then
0∧ω =ω∧0=0
3
Johns Hopkins University, CTYOnline
Differential Forms
(6) The following rules hold for basic 1-forms:
dx ∧ dx = dy ∧ dy = dz ∧ dz = 0
dy ∧ dz = dy dz = (−1)(dz ∧ dy)
dz ∧ dx = dz dx = (−1)(dx ∧ dz)
dx ∧ dy = dx dy = (−1)(dy ∧ dx)
(dx ∧ dy) ∧ dz = dx dy dz = dx ∧ (dy ∧ dz)
The properties of the wedge product allow us to simplify more complicated products.
Example: If ω = dx and η = dz dx, then
ω ∧ η = dx ∧ (dz dx)
= dx ∧ (dz ∧ dx)
= dx ∧ ((−1)(dx ∧ dz))
= (−1)(dx ∧ (dx ∧ dz))
= (−1)((dx ∧ dx) ∧ dz)
= (−1)(0 ∧ dz)
= (−1)(0)
=0
In fact, property (2) and the first part of property (6) imply that any wedge product of
basic forms with a repeated dx, dy, or dz is 0. For example, (dy dz) ∧ dz = 0 because of
the repeated dz, and dx ∧ (dy dx) = 0 because of the repeated dx.
Example: If ω = dx + y dz and η = x dy − yz dz, then
ω ∧ η = (dx + y dz) ∧ (x dy − yz dz)
= dx ∧ (x dy) + dx ∧ (−yz dz) + (y dz) ∧ (x dy) + (y dz) ∧ (−yz dz)
= x (dx ∧ dy) − yz (dx ∧ dz) + xy (dz ∧ dy) − y 2 z (dz ∧ dz)
= x(dx ∧ dy) + yz (dz ∧ dx) − xy (dy ∧ dz)
= −xy dy dz + yz dz dx + x dx dy
4
Johns Hopkins University, CTYOnline
Differential Forms
Example: If ω = y 2 dx − dz and η = −z dz dx + x dx dy, then
ω ∧ η = (y 2 dx − dz) ∧ (−z dz dx + x dx dy)
= (y 2 dx − dz) ∧ (−z dz ∧ dx + x dx ∧ dy)
= −y 2 dx ∧ dz ∧ dx + xy 2 dx ∧ dx ∧ dy + z dz ∧ dz ∧ dx − x dz ∧ dx ∧ dy
= −x dz ∧ dx ∧ dy
= x dx ∧ dz ∧ dy
= −x dx ∧ dy ∧ dz
= −x dx dy dz
2.1.3
Differentiation
The derivative of a k-form ω is a (k + 1)-form denoted by dω. Because there are no nonzero
4-forms on R3 , if ω is a 3-form, then dω = 0. The derivative satisfies the following properties:
(1) If f is a 0-form, then
df =
∂f
∂f
∂f
dx +
dy +
dz
∂x
∂y
∂z
(2) (Linearity) If ω1 and ω2 are k-forms, then
d(ω1 + ω2 ) = dω1 + dω2
(3) If ω is a k-form and η is an l-form, then
d(ω ∧ η) = (dω ∧ η) + (−1)k (ω ∧ dη)
(4) If ω is a k-form, then
d(dω) = 0
5
Johns Hopkins University, CTYOnline
Differential Forms
Remark: By property (1), the basic 1-forms dx, dy, and dz are the derivatives of the 0forms x, y, and z, respectively. It follows from property (4) that
d(dx) = d(dy) = d(dz) = 0
We may use properties of the derivative to find the derivative of any k-form.
Example: If ω = dx dy, then
dω = d(dx dy)
= d(dx ∧ dy)
= (d(dx)) ∧ dy − dx ∧ (d(dy))
= 0 ∧ dy − dx ∧ 0
=0
Similarly, the derivatives of dy dz and dz dx are 0. This simplifies the computation of
derivatives, as the next examples show.
Example: If f is a 0-form and ω is a basic 1- or 2-form (dx, dy, dz, dx dy, dy dz, or dz dx),
then
d(f ω) = d(f ∧ ω)
= (df ) ∧ ω + f ∧ (dω)
= (df ) ∧ ω + f ∧ 0
= (df ) ∧ ω
Example: If ω = (xy + z 2 ) dy dz, then by the result of the previous example,
6
Johns Hopkins University, CTYOnline
Differential Forms
dω = d(xy + z 2 ) ∧ (dy dz)
= (y dx + x dy + 2z dz) ∧ (dy dz)
= y dx ∧ dy ∧ dz + x dy ∧ dy ∧ dz + 2z dz ∧ dy ∧ dz
= y dx ∧ dy ∧ dz
= y dx dy dz
Example: If ω = y 2 dx + xz 2 dz, then
dω = d(y 2 dx) + d(xz 2 dz)
= d(y 2 ) ∧ dx + d(xz 2 ) ∧ dz
= (2y dy) ∧ dx + (z 2 dx + 2xz dz) ∧ dz
= 2y dy ∧ dx + z 2 dx ∧ dz + 2xz dz ∧ dz
= −2y dx ∧ dy − z 2 dz ∧ dx
= −z 2 dz dx − 2y dx dy
2.1.4
Integration
A k-form may be integrated over a k-dimensional subset of R3 , assuming that the form
and the subset are “nice” enough. We will consider integrals of k-forms for k = 0, 1, 2, 3
separately.
Integrals of 0-forms
A 0-form f may be “integrated” over an oriented 0-dimensional subset of R3 . In this context, a 0-dimensional subset of R3 is simply a finite set of points, an orientation of such
a subset is a labeling of each point in the set as either “positive” or “negative,” and integration is simply function evaluation. Suppose P is a point in a 0-dimensional subset S
of R3 . If P is “positive,” then P contributes f (P ) to the integral of f over S, and if P is
“negative,” then P contributes −f (P ) to the integral.
Example: The integral of f (x, y, z) = xyz over the set {(1, 1, 1), (2, 2, 2)}, where (1, 1, 1)
is “positive” and (2, 2, 2) is “negative,” is
f (1, 1, 1) − f (2, 2, 2) = 1 − 8 = −7
7
Johns Hopkins University, CTYOnline
Differential Forms
If both points are instead “positive,” then the integral is
f (1, 1, 1) + f (2, 2, 2) = 1 + 8 = 9
Integrals of 1-forms
Let
ω = P dx + Q dy + R dz
be a 1-form, and let C be an oriented simple curve in R3 . We define the integral of ω over
C as a line integral:
Z
Z
ω=
P dx + Q dy + R dz
C
C
We can think of a 1-form ω as a function from the set of oriented, smooth, simple curves
R
in R3 to the set of real numbers. This function takes a curve C to the real number C ω.
A similar observation holds for k-forms for any value of k. In this way, differential forms
are generalizations of scalar functions.
Example: Let ω = y dx + x dy + dz, and let C be any oriented, smooth, simple closed
curve. Then
Z
Z
y dx + x dy + dz = 0
ω=
C
C
because F(x, y, z) = hy, x, 1i is a conservative vector field and C is closed.
Integrals of 2-forms
Let
ω = P dy dz + Q dz dx + R dx dy
be a 2-form, and let S be an oriented smooth surface in R3 parametrized by
8
Johns Hopkins University, CTYOnline
Differential Forms
r(u, v) = hx(u, v), y(u, v), z(u, v)i,
(u, v) ∈ D
Letting F(x, y, z) = hP (x, y, z), Q(x, y, z), R(x, y, z)i, we define the integral of ω over S as
a surface integral:
ZZ
ZZ
F · dS
ω=
S
S
ZZ
F(r(u, v)) · (ru × rv ) du dv
=
D
ZZ =
D
∂(z, x)
∂(x, y)
∂(y, z)
+ Q(r(u, v))
+ R(r(u, v))
P (r(u, v))
du dv
∂(u, v)
∂(u, v)
∂(u, v)
where
∂y
∂(y, z)
∂u
=
∂(u, v)
∂z
∂u
∂y
∂v
,
∂z
∂v
∂z
∂(z, x)
∂u
=
∂(u, v)
∂x
∂u
∂z
∂v
,
∂x
∂v
∂x
∂(x, y)
∂u
=
∂(u, v)
∂y
∂u
∂x
∂v
∂y
∂v
Example: Let ω = x dy dz + 2 dz dx + 2z dx dz and F(x, y, z) = hx, 2, 2zi, and let S
be the surface of the unit sphere in R3 with positive (outward) orientation. Then by the
Divergence Theorem, the integral of ω over S is
9
Johns Hopkins University, CTYOnline
Differential Forms
ZZ
ZZ
F · dS
ω=
S
S
ZZZ
=
div F dV
E
ZZZ
=
3 dV
E
= 3 × (Volume of the unit sphere)
= 4π
Integrals of 3-forms
Let
ω = f dx dy dz
and let E be a simple solid region in R3 . The integral of ω over E is given by the triple
integral of f over E:
ZZZ
ZZZ
ω=
f dV
E
E
Example: The integral of ω = 4x dx dy dz over the unit cube E in R3 is
ZZZ
Z 1Z 1Z 1
ω=
4x dx dy dz = 2
E
0
0
0
10
Johns Hopkins University, CTYOnline
3
Differential Forms
General Stokes’ Theorem
It turns out that there is a very simple formula relating an integral of a differential form ω
to an integral of dω. To state this result, we first unify sets of points, curves, surfaces, and
3D regions in R3 using the language of manifolds.
Definition: An oriented k-manifold in R3 is one of the following: an oriented set of points,
an oriented smooth simple curve, an oriented smooth surface, or a simple solid region in
R3 . The number k is the dimension of the manifold. The boundary (if any) of the manifold
is denoted by ∂M .
The boundary ∂M of an oriented k-manifold M (k = 1, 2, 3) inherits an orientation from
M . We handle separately the cases k = 1, 2, and 3.
Boundary of an Oriented 1-Manifold
Let C be an oriented simple curve in R3 , beginning at the point P0 and ending at the point
P1 . If P0 = P1 , then ∂C is empty. Otherwise, ∂C is the set {P0 , P1 }, where P0 is “negative”
and P1 is “positive.”
Boundary of an Oriented 2-Manifold
Let S be an oriented surface with boundary curve ∂S. (Note that not every surface has a
“nice” boundary, or even a boundary at all; we make the assumption that ∂S is a smooth,
simple, closed curve.) Recall that choosing an orientation of S is equivalent to choosing a
continuous field of unit normal vectors on S. The induced orientation of ∂S is such that if
you travel along ∂S in the direction of its orientation in such a way that the unit normal
vectors at nearby points of S are pointing from your feet toward your head, then the surface S is to your left. This is nothing new; the induced orientation on ∂S is the same that
is used when applying the version of Stokes’ Theorem we have seen previously in this course.
11
Johns Hopkins University, CTYOnline
Differential Forms
Boundary of an Oriented 3-Manifold
Let E be a simple solid region in R3 with boundary surface ∂E. Then we take ∂E to be
oriented outward.
Now we are ready to state the General Stokes’ Theorem.
Main Theorem (General Stokes’ Theorem): Let M be an oriented k-manifold (k = 1, 2, 3)
in R3 with boundary ∂M , and let ω be a (k − 1)-form. Then
Z
Z
ω=
dω
∂M
M
We will see below that depending on the value of k, the statement of the General Stokes’
Theorem is equivalent to either the Fundamental Theorem for Line Integrals, (usual) Stokes’
Theorem, or the Divergence Theorem. The benefit of combining these theorems into the
General Stokes’ Theorem is not only that it is pretty, but also that the General Stokes’
Theorem generalizes to higher dimensions if we make the small effort to define differential
forms and oriented manifolds in Rn . Unfortunately, the proof of the General Stokes’ Theorem in Rn is beyond the scope of this course.
3.1
The Fundamental Theorem of Calculus
Using differential forms on R, we will see that the Fundamental Theorem of Calculus from
single-variable calculus is a special case of the General Stokes’ Theorem.
On R, there are only two kinds of differential forms, 0-forms and 1-forms. A 0-form is a
scalar function f (x), and a 1-form is an expression of the form f (x) dx. The derivative of
12
Johns Hopkins University, CTYOnline
Differential Forms
a 0-form f (x) is simply
df = f 0 (x) dx
Given a 0-form f (x) and a closed interval [a, b], the General Stokes’ Theorem says that
Z
Z
f=
df
{a,b}
[a,b]
The integral on the left side is the integral of the 0-form f over the 0-dimensional set {a, b},
where a is “negative” and b is “positive.” Its value is simply f (b)−f (a). The integral on the
right is the integral of the function f 0 (x) on the interval [a, b]. Rewriting the equality, we get
Z b
f (b) − f (a) =
f 0 (x) dx
a
which is the Fundamental Theorem of Calculus!
3.2
The Fundamental Theorem for Line Integrals
We now return to R3 . Let C be an oriented simple curve in R3 with endpoints P0 and P1 .
Assume for simplicity that P0 6= P1 (otherwise, C has no boundary). Let F(x, y, z) be a
conservative vector field. It follows that there exists a scalar function f (x, y, z) such that
∂f ∂f ∂f
,
,
F(x, y, z) =
∂x ∂y ∂z
Applying the General Stokes’ Theorem to the 0-form f and the curve C, we obtain
Z
Z
f=
df
{P0 ,P1 }
C
The integral on the left side is taken over the 0-dimensional set {P0 , P1 }, where P0 is “negative” and P1 is “positive.” Its value is f (P1 ) − f (P0 ). Rewriting the integral on the right
side, we get
13
Johns Hopkins University, CTYOnline
Z
Z
df =
C
C
Differential Forms
∂f
∂f
∂f
dx +
dy +
dz
∂x
∂y
∂z
Z
F · dr
=
C
The statement of the General Stokes’ Theorem applied to f and C therefore simplifies to
Z
f (P1 ) − f (P0 ) =
F · dr
C
which is the Fundamental Theorem for Line Integrals!
3.3
Green’s Theorem
In this section, we will consider differential 1-forms and 2-forms on R2 . These, respectively,
take the form
P (x, y) dx + Q(x, y) dy
and
f (x, y) dx dy
Let ω = P dx + Q dy be a 1-form, and let C be a smooth, simple, closed curve in R2
bounding a region D. We give C the positive (counterclockwise) orientation. Then by the
General Stokes’ Theorem,
ZZ
Z
dω
ω=
C
D
14
Johns Hopkins University, CTYOnline
Differential Forms
To see that this is Green’s Theorem, we must simplify dω:
dω = d(P dx) + d(Q dy)
= d(P ∧ dx) + d(Q ∧ dy)
= (dP ) ∧ dx + (dQ) ∧ dy
=
∂P
∂Q
∂Q
∂P
dx +
dy ∧ dx +
dx +
dy ∧ dy
∂x
∂y
∂x
∂y
=
∂P
∂P
∂Q
∂Q
dx ∧ dx +
dy ∧ dx +
dx ∧ dy +
dy ∧ dy
∂x
∂y
∂x
∂y
=
∂Q
∂P
dy ∧ dx +
dx ∧ dy
∂y
∂x
=−
=
=
∂P
∂Q
dx ∧ dy +
dx ∧ dy
∂y
∂x
∂Q ∂P
−
∂x
∂y
∂Q ∂P
−
∂x
∂y
dx ∧ dy
dx dy
Looks familiar, right? The statement of the General Stokes’ Theorem above becomes
Z
ZZ ∂Q ∂P
P dx + Q dy =
−
dx dy
∂x
∂y
C
D
which is Green’s Theorem!
3.4
Stokes’ Theorem
We again return to R3 , and consider a smooth oriented surface S with smooth, simple, closed boundary C with orientation induced from the orientation on S. Let ω =
P dx + Q dy + R dz be a 1-form. Then the statement of the General Stokes’ Theorem
15
Johns Hopkins University, CTYOnline
Differential Forms
applied to S and ω is:
Z
ZZ
ω=
dω
C
S
As before, let’s simplify dω:
dω = d(P dx) + d(Q dy) + d(R dz)
= d(P ∧ dx) + d(Q ∧ dy) + d(R ∧ dz)
= (dP ) ∧ dx + (dQ) ∧ dy + (dR) ∧ dz
=
∂P
∂P
∂P
dx +
dy +
dz
∂x
∂y
∂z
+
+
=
∧ dx
∂Q
∂Q
∂Q
dx +
dy +
dz
∂x
∂y
∂z
∂R
∂R
∂R
dx +
dy +
dz
∂x
∂y
∂z
∂R ∂Q
−
∂y
∂z
dy dz +
∧ dy
∧ dz
∂R
∂P
−
∂z
∂x
dz dx +
If we let F(x, y, z) = hP (x, y, z), Q(x, y, z), R(x, y, x)i, then
Z
Z
ω=
C
P dx + Q dy + R dz
C
Z
F · dr
=
C
16
∂Q ∂P
−
∂x
∂y
dx dy
Johns Hopkins University, CTYOnline
Differential Forms
and
ZZ ZZ
dω =
S
S
ZZ =
S
∂R ∂Q
−
∂y
∂z
dy dz +
∂P
∂R
−
∂z
∂x
∂R ∂Q ∂P
∂R ∂Q ∂P
−
,
−
,
−
∂y
∂z ∂z
∂x ∂x
∂y
dz dx +
∂Q ∂P
−
∂x
∂y
dx dy
· dS
ZZ
curl F · dS
=
S
Putting everything together, the statement of the General Stokes’ Theorem applied to S
and ω is
Z
ZZ
F · dr =
curl F · dS
C
S
which is Stokes’ Theorem!
3.5
The Divergence Theorem
Let E be a simple solid region in R3 with boundary surface S, and let ω = P dy dz +
Q dz dx + R dy dz be a 2-form. The statement of the General Stokes’ Theorem in this case
is
ZZ
ZZZ
ω=
dω
S
E
17
Johns Hopkins University, CTYOnline
Differential Forms
We again simplify dω:
dω = d(P dy dz) + d(Q dz dx) + d(R dy dz)
= d(P ∧ dy ∧ dz) + d(Q ∧ dz ∧ dx) + d(R ∧ dy ∧ dz)
= (dP ) ∧ dy ∧ dz + (dQ) ∧ dz ∧ dx + (dR) ∧ dy ∧ dz
=
∂P
∂P
∂P
dx +
dy +
dz
∂x
∂y
∂z
+
+
=
∧ dy ∧ dz
∂Q
∂Q
∂Q
dx +
dy +
dz
∂x
∂y
∂z
∂R
∂R
∂R
dx +
dy +
dz
∂x
∂y
∂z
∧ dz ∧ dx
∧ dx ∧ dy
∂P
∂Q
∂R
dx ∧ dy ∧ dz +
dy ∧ dz ∧ dx +
dz ∧ dx ∧ dy
∂x
∂y
∂z
=
∂Q ∂R
∂P
+
+
∂x
∂y
∂z
dx dy dz
If we let F(x, y, z) = hP (x, y, z), Q(x, y, z), R(x, y, z)i, then
ZZ
ZZ
ω=
P dy dz + Q dz dx + R dy dz
S
S
ZZ
F · dS
=
S
and
ZZZ ZZZ
dω =
E
E
∂P
∂Q ∂R
+
+
∂x
∂y
∂z
ZZZ
=
div F dV
E
18
dx dy dz
Johns Hopkins University, CTYOnline
Differential Forms
The statement of the General Stokes’ Theorem in this case becomes
ZZ
ZZZ
F · dS =
div F dV
S
E
which is the Divergence Theorem!
4
Conclusion
We have now seen that the fundamental integral theorems of single-variable and multivariable calculus are all special cases of a simply-stated theorem, the General Stokes’ Theorem,
that is valid in all dimensions. Using differential forms, which can be defined in all dimensions, we are no longer limited by operations like the cross product that are only valid in
R3 . As an exercise, in R4 , you might try to: (1) define differential forms; (2) define oriented
curves and surfaces; (3) define integrals of 1-forms and 2-forms over oriented curves and
surfaces; (4) verify the General Stokes’ Theorem for a particular 1-form ω and a particular
oriented surface S with smooth, simple boundary. The surface S might be, for example,
the image of the unit disk in R2 under a one-to-one linear function T : R2 → R4 .
19