Generation of a Tachometer Signal from a
Smart Vibration Sensor
Eric Bechhoefer, GPMS
Ed Spence, The Machine Instrumentation Group
Presented at the MFPT 2018
Virginia Beach, VA, 15-17 May 2018
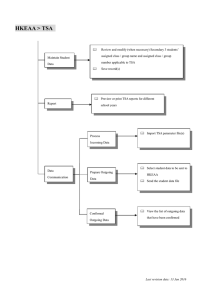
Introduction
TSA, commonly applied for shaft, gear and bearing
analysis, requires a Tach
A Tach cannot be applied in some applications
A novel, 2-process is introduced to generate a high
quality Tach signal from the vibration data
– Cyclic rate of the shaft is reconstructed by removing extraneous
vibration data with an idealized BPF
– Then remove jitter from the resulting signal
Tach signal can then be used for TSA averaging and
TSA resampling algorithms
Technique is demonstrated on two data sets
Generation of a Tachometer Signal from a Smart
Vibration Sensor
Some History
– S. BRAUN. The extraction of periodic waveforms by time
domain averaging. Acustica, 32 (1975)
TSA
– R, Stewart: Some Useful Data Analysis Techniques for
Gearbox Diagnostics, Institute of Sound and Vibration
Research, Proceeding of Meeting on Application of Time
Series Analysis, Sept. 1977
FM0/1/2/3/4,Residual, Envelope Analysis
– Foundation for Modern Gearbox Analysis.
Note: Stewart Comments on Tach Jitter, states that
there is a limit to the number of Revs for the TSA
3
The Need for a Tachometer
• Common to use FFT for Condition
Monitoring Analysis
– Frequency Magnitude and Phase
– Idealized Filtering for Residual Analysis
– Hilbert Transform for Amplitude and
Frequency Modulation, Envelope analysis.
• FFT Assumptions
– Infinitely Long Signal (e.g. Gibb’s Effect)
• Finite effects mitigated by windowing
(Hamming, Hann, etc.)
– Signal is Stationary – e.g. Exhibits
Stationarity
4
Stationarity and Stationary Signals
Implies that the conditions of the signal do not
change
Shaft rate always changing
– Bandwidth limits of the feedback from controller
Lack of Stationarity degrades spectral analysis
– Spectral smearing
Reduces the probability of fault detection
5
The Resample Algorithm
• Restores Stationarity by
resampling
• TSA removes nonsynchronous noise
– Reduces Asynchronous
Signals by 1/Sqrt(n) is
“consistent”
– Usually Radix-2
– One Rev based on number
of samples measured by the
key phasor, e.g. the Tach
– ex: 824 samples in a rev is
resampled to 1024
TSA Algorithm
Set TSA Length
m = 2ceil(log2(r))
tsa = zero(m ,1)
For i = 1:N
Revolutions
Resample r data
points into M data
points
tsa = tsa + M
Resam ple Algorithm
Set Segment Length
ceil(log2(r))
m=2
samp = zero(m*N,1)
For i = 1:N
Revolutions
indx = i*m + 1:m
Resample r data
points into M data
points
samp(indx ) = M
tsa = tsa/ N
Get Apparent Sam ple Rate
TSA = DFT(tsa)
Spectrum = Welches(sam p)
6
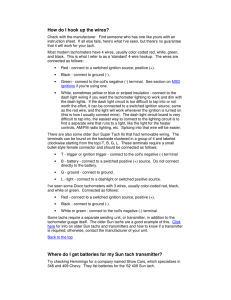
The Tachometer Signal
Taken as the rising edge of a Key Phasor
– Variable Reluctance (e.g. Generator Signal)
– NPN or PNP (e.g. Hall or Optical Sensor)
Two Method for calculating Zero Cross Time
– ADC: Sample the signal and post process for zero cross.
Limited to sample rate (e.g. 100,000 sps)
– Comparator on Microcontroller GPIO Pin. Essentially the
clock speed of the Micro (50 MHz, etc.)
Jitter reduces the “consistency” of the Tach signal
– Generally, more Revs does not improve TSA
7
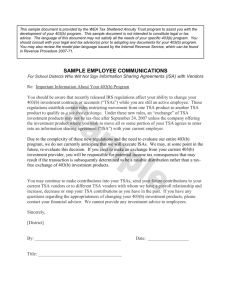
Why “Tachless” Vibration Monitoring
Some applications cannot implement a Tach
– e.g. Glandless Pump due to high temperature and
pressure (see BCP paper, MFPT 2018)
– Introduction would require expensive re-certification
(e.g HUMS)
HUMS adoption is an ROI calculation.
– Removing Tach reduces cost
– One less sensor reduces weight (less rotorcraft fuel)
– Smart vibration sensors
Local Processing of tachometer and vibration to reduce cost
and weight
8
Generating Tach from Vibration is a 2-step
process...
Tach derived from the vibration signal still includes jitter
– Need to reprocess to remove
Theory: Vibration is synchronous with a shaft
– Pick a Vibration Signal, say a gear mesh (27 tooth)
– Count 27 zero crossings, and call that time the ‘Tach Zero
Cross’
– Unfortunately, time domain signal is superposition of many
signals...
Thesis: process the signal to...
– Remove extraneous signals (ex. Noise, shaft harmonics, gear
mesh frequencies, etc)
– Use the Analytic Signal for calculating the Zero Crossing
9
Using Analytic Signal for deriving Time of Zero Cross
• Hilbert Transform
defined as
Gs
0
0
-0.5
-0.5
-1
-1
0
0.4
0.2
0.6
0.8
0
1
0.4
0.2
0.6
1
0.8
Time (sec)
Reconstructed Zero Cross
Time (sec)
(Sa))
unwrap(atan(as))
• Ex: 2 Hz Sine
1
10
0.8
Radians
– Imaginary Part of Sa
is Signal + π/2
– Zero Cross is the
Interpolated Time
every 2π
0.5
0.5
Time (sec)
S = F{s(t)}
Sa(f) = S(f), f = 0
Sa(f) = 0, f < 0
Sa(f) = 2Sa(f), f > 0
sa(t) = F-1 (Sa(f))
1
Real
Image
Gs
–
–
–
–
–
Analytic Signal
2 Hz Sine, 1000 sps
1
8
6
4
2
0.6
0.4
0.2
0
0
0
2
4
Angle (Radians)
6
0
2
4
6
Angle (Radians)
10
Prior Art
•
Bonnardot et. al (2007) demonstrated
tach from vibe using the analytic signal
–
•
Implemented a band pass filter filter centered
on a gear mesh
Band pass filters “leak”
– 29 Hz shaft, 32 tooth: 928 Hz Gear Mesh
– 120 tap FIR filter
– Filter does not reject 1/Rev side bands,
corrupts zero cross signal, reducing SNR
•
•
•
Phase Error (e.g. zct) is a function of SNR
σ[δ]=1/sqrt(2)10-snr/20
6-8dB SNR is typical, or about 6 to 10
degrees of phase error
11
Improved Tach from Vibe Using Idealized Filter
(Recipe*)
• Calculate radix-2 length for the
FFT.
• Calculate the low and high
bandwidth index (bwlow, bwhigh),
which are centered are a know
gear mesh
• Take the zero padded FFT of the
vibration data
• Zero the FFT from zero to bwlow,
and from bwhigh to nRadix
• Take the inverse FFT
• Calculate the unwrapped argument
of the signal from 1 to n time series
• Normalize the time series of radians
by the number of teeth of the gear
(assuming 1st harmonics)
• Interpolate the number of indexes
for every 2 radians
• Normalized to tachometer zero
crossing times by sr.
*Much more tractable with a distributed processing approach...
12
Example of Idealized filter vs. FIR filter
• 97,656 sps x 6 x sec
– 585,936 -> 1,048,576 pt FFT
• 29 Hz Shaft, 32 tooth Gear
– 928 Hz +/- 29 Hz
– Bandwidth of Filter 910 and
960 Hz
– bwlow = 920/sr x 1,048,576 =
9771
– bwhigh = 960 / 97,656 *
1,048,576 = 10,308.
– Sa(f) = 0, f < bwlow, f > bwhigh
13
Controlling Jitter – Prior Art
A previous paper* described a 25% Improvement in
analysis by reducing jitter – with Tach...
Developed a zero phase IIR filter procedure to remove
noise not associated with changed in shaft speed
IIR filters are not ideal
– New procedure uses Idealized filter...
*Improving Gear Fault Detection by Reducing Tachometer Jitter, AHS 2015
14
Application of a New and Improved Jitter
Reduction Procedure (Recipe)
•
•
•
•
•
•
•
•
•
•
Take the pseudo derivative of the tachometer
signal
Calculate the the radix-2 length of the pseudo
derivative signal of length n
Zero pad the array from n to the radix-2 length
Calculate the bandwidth index of the FFT
Idx = floor(bandwidth * radix-2 length / 2);
Bandwidth is a normalized value, typically 0.12
Take the real FFT of the zero padded derivative
signal
Set the real and imaginary parts of the FFT
from Idx to the radix-2 length
Take the inverse real FFT.
Reconstruct the tachometer signal by taking
the pseudo integral of the signal
Data set from a wind turbine with 8 targets per revolution.
The periodic peaks are due to spacing error in the tachometer
target, which introduces non-random jitter error.
The idealized filter removes all the spectral power (jitter)
15
Ex 1. High Speed Pinion on a Wind Turbine
Wind turbine conditions:
• SR: 97,656
• 30 Hz Shaft
• Cracked Tooth On Pinion
• Tach from Hall Sensor
Using Comparator
• 6 dB SNR data prior jitter
reduction
Comparison of Tach signal vs. Tach-less Solution
16
TSA Comparison
17
Tach vs. Tachless for Standard CIs
Analysis
Tach
Tach from Vibe
SO1
0.0100 g
0.0104 g
SO2
0.0013 g
0.0016 g
SO3
0.0019 g
0.0018 g
TSA RMS
0.5091 g
0.4828 g
TSA P2P
2.0887 g
1.8430 g
FM0
4.278
4
AM RMS
0.100 g
0.099 g
AM Kurtosis
4.242
4.217
FM RMS
0.428 radians
0.426 radians
FM Kurtosis
4.995
4.844
18
Tail Rotor Intermediate Gearbox Pinion Fault
Comparison of Tach vs. Tach-less Solution
• SR: 100,000
• VR Tach on 500 Hz Shaft,
22 tooth
• Shaft Under Analysis is
~68.5 Hz
• 12 dB SNR
• Tach time generated via
ADC
Note the high level of Jitter on the VR tach
19
TSAs differ only in phase
20
Tach vs. Tachless for Standard CIs
Analysis
SO1
Tach
0.043g
Tach from Vibe
0.043g
SO2
0.283 g
0.282 g
SO3
1.855 g
1.85g
TSA RMS
81.646 g
81.591g
TSA P2P
222.77g
223.02g
FM0
16.94
15.38
AM RMS
17.06g
17.06g
AM Kurtosis
4.126
4.126
FM RMS
3.037 radians
3.048 radians
FM Kurtosis
2.46
2.45
21
Implementation Issues
Very Difficult to Implement Long FFT
on an Embedded System
– Floating point (32b)
• breaks at 32K points
– Double precision (64b)
• Uses 2x RAM
• 5x slower
– Naive implementation (first
attempt) 15 minutes; improved
to run in 3 minutes
22
Conclusion
• Tach-less TSA was demonstrated
on two fault cases
• Analysis Results Between Tach
and Tach-less TSA were
indistinguishable
• Tach-less Smart Vibration Sensor
can be implemented to reduce
the cost of a HUMS installation
• Goal: lower cost HUMS
installation for Type 27 AC
(<9,000 lbs)
Smart
Vibration
Sensor
23
24