Damped and Forced Oscillator
Damped Oscillator:
In classical mechanics, a harmonic oscillator is a system that, when displaced
from its equilibrium position, expresses a restoring force, F proportional to
displacement y,
F
-y
If F is the only force acting on the system, then the system is called a simple
harmonic oscillator. But if a frictional force is proportional to the velocity is also
present, the harmonic oscillator is described as a damped oscillator.
For example, when the pendulum vibrates in air medium, there are frictional
forces and consequently energy is dissipated in each vibration. The amplitude of
swing decreases continuously with time and finally the oscillation die out. Such
vibrations are called damped vibrations.
Differential equation of Damped Harmonic Oscillation:
A body executing SHO in a damping medium will be simultaneously subjected
to the following two opposing forces:
1. The restoring force acting on the body that is proportional to the displacement
of the body acts in a direction opposite to the displacement. So,
𝐹1 = -ay
Where, ‘a’ is the force constant.
2. A resistive or damping force. It has been found that, at ordinary velocities, the
opposing or damping force is proportional to the velocity of the oscillating body.
So,
𝐹2 = -bv = -b
dy
dt
Where b is the proportionality constant called damping coefficient. The (-)ve sign
signifies a restraining influence on the vibration of the particle.
Thus the differential eqution of a body executing damped harmonic oscillations
is written as,
d2 y
m
dt2
= -ay - b
dy
dt
d2 y
m
d2 y
dt2
d2 y
dt2
dy
+b
dt2
+
dt
𝑏 dy
𝑚 dt
+ 2𝜆
Where, 2𝜆 =
+ ay = 0
+
dy
dt
𝑏
𝑚
a
m
y=0
2
+
y = 0 …………………………………………(1)
2
and
=
a
.
m
Solution of the Differential equation of Damped Harmonic
Oscillation:
Let a trial solution of Differential equation of the damped harmonic oscillator be,
y = A𝑒 kt ……………………………………………………………………(2)
Now,
And
dy
dt
d2 y
dt2
= kA𝑒 kt
= k2A𝑒 kt
Substituting these values in (1)
k2A𝑒 kt + 2𝜆 kA𝑒 kt +
k2 + 2𝜆 k +
2
2
A𝑒 kt = 0
= 0 …………………………………………….(3)
It’s a quadratic equation in k. So, the solution is,
−2𝜆
√(2𝜆)2 −4 2
k=
2
k = −𝜆
√𝜆2 −
2
……………………………………………(4)
So, the differential equation (1) is therefore satisfied by two values of y, they are:
2
y = A exp {(−𝜆 + √𝜆 −
2 ) 𝑡}
2
and y = A exp {(−𝜆 − √𝜆 −
2 ) 𝑡}
The equation being a linear one, the linear sum of the two linearly independent
solutions of the equation is a – and, indeed the most general solution. Thus, the
general solution is,
2
y = A1 exp {(−𝜆 + √𝜆 −
2 ) 𝑡} + A
2
2
exp {(−𝜆 − √𝜆 −
2 ) 𝑡}………..(5)
Where, A1 and A2 are arbitrary constants.
Now,
dy
dt
= (−𝜆 + √𝜆2 −
2) A
1
2
exp {(−𝜆 + √𝜆 −
2 ) 𝑡} +
2
(−𝜆 − √𝜆 −
2) A
2
2
exp {(−𝜆 − √𝜆 −
2 ) 𝑡} ……………………..(6)
Let the maximum value of the displacement y be, y𝑚𝑎𝑥 = ao at time t = 0. Then
from (5),
y𝑚𝑎𝑥 = ao = A1 + A2 ………………………………………………………..(7)
Again the velocity is zero at maximum displacement.
So,
dy
dt
= 0, at t = 0. So,
From (6),
2
(−𝜆 + √𝜆 −
2) A
1
2
+ (−𝜆 − √𝜆 −
−𝜆 (A1 + A2) + √𝜆2 −
2
√𝜆2 −
∴ A1 - A2 =
2
∴ A1 =
1
2
2
=0
(A1 - A2) = 0
(A1 - A2) = 𝜆 (A1 + A2) = 𝜆 ao
𝜆𝑎𝑜
√𝜆2 − 2
……………………………………………………….(8)
Adding (7) and (8),
2A1 = ao +
2) A
𝜆𝑎𝑜
√𝜆2 − 2
ao (1 +
Similarly, A2 =
1
2
𝜆
√𝜆2 − 2
ao (1 −
)
𝜆
√𝜆 2 − 2
)
Substituting A1 and A2 into (5),
1
y = ao (1 +
2
𝜆
√𝜆2 −
)𝑒
2
(−𝜆+ √𝜆2 − 2 ) 𝑡 1
+ ao
2
(1 −
𝜆
√𝜆2 −
)𝑒
2
(−𝜆+ √𝜆2 − 2 ) 𝑡
Finally,
1
y = ao 𝑒 𝜆𝑡 [(1 +
2
𝜆
√𝜆 2 −
)𝑒
2
( √𝜆2 − 2 ) 𝑡
+ (1 −
𝜆
√𝜆 2 −
)𝑒
2
(− √𝜆2 − 2 ) 𝑡
]
………………………..(9)
Three important cases now arises,
i.
𝛌𝟐 >
𝟐
∶
Damping is large. √𝜆2 − 2 is clearly a real quantity with positive value, less
than λ. Thus each of the two terms on the R. H. S. of (9) has an exponential term
with a negative power and hence each decreases exponentially with time. In this
case, the particle do not vibrate. There is no oscillation and the motion is called
over damped.
ii.
𝛌𝟐 =
𝟐
∶
In that case, √𝜆2 − 2 = 0. So, each of the two terms of the R. H. S of (9)
becomes infinite and the solution breaks down.
Let λ2 is not quite equal to 2, but very nearly. So that √𝜆2 −
small quantity but not zero. Then from (5),
2
= h, a very
y = A1 exp {(−𝜆 + ℎ) 𝑡} + A2 exp {(−𝜆 − ℎ) 𝑡}
y = 𝑒 −𝜆𝑡 (A1 𝑒 ℎ𝑡 + A2 𝑒 −ℎ𝑡 )
y = 𝑒 −𝜆𝑡 [𝐴1 (1 + ℎ𝑡 +
𝐴2 (1 − ℎ𝑡 +
(ℎ𝑡)2
2!
(ℎ𝑡)2
2!
+
−
(ℎ𝑡)3
3!
(ℎ𝑡)3
3!
+ ⋯ )+
+ ⋯ )]
Neglecting the second and higher power of h,
y = 𝑒 −𝜆𝑡 [𝐴1 (1 + ℎ𝑡) + 𝐴2 (1 + ℎ𝑡) ]
y = 𝑒 −𝜆𝑡 [(𝐴1 + 𝐴2 ) + (𝐴1 − 𝐴2 )ℎ𝑡]……………………………….(10)
Let, 𝐴1 + 𝐴2 = M and (𝐴1 − 𝐴2 )ℎ = N. Then we have,
y = 𝑒 −𝜆𝑡 [𝑀 + 𝑁𝑡]…………………………………………………………(11)
Recalling that y = ymax = ao and
dy
dt
= 0, at t = 0. We have,
M = ymax = ao and N = λ ao. So, from (11),
y = 𝑒 −𝜆𝑡 (ao +λaot)
so, y = ao 𝑒 −𝜆𝑡 (1 +λt) ………………………………………………….(12)
The second term of (12), ao λt 𝑒 −𝜆𝑡 decays less rapidly than the first term ao 𝑒 −𝜆𝑡
and the displacement of the oscillator first increases but as t increases, the
exponential factor 𝑒 −𝜆𝑡 becomes more important and the displacement decreases
rapidly reaching the value zero for finite value of t. The oscillator just ceases to
oscillate and its motion just becomes aperiodic or non-oscillatory. This is called
the case of critical damping.
i.
𝛌𝟐 <
𝟐
∶
The quantity √𝜆2 − 2 is clearly imaginary say √𝜆2 − 2 = ig where i = √−1
and g = √ 2 −𝜆2 is a real quantity. Equation (5) is then becomes,
y = A1 exp {(−𝜆 + 𝑖𝑔) 𝑡} + A2 exp {(−𝜆 − 𝑖𝑔) 𝑡}
y = 𝑒 −𝜆𝑡 (A1𝑒 𝑖𝑔𝑡 + A2𝑒 −𝑖𝑔𝑡 )
y = 𝑒 −𝜆𝑡 [A1 (𝑐𝑜 𝑠 𝑔𝑡 + 𝑖 sin 𝑔𝑡) + A2 (𝑐𝑜 𝑠 𝑔𝑡 − 𝑖 sin 𝑔𝑡)]
y = 𝑒 −𝜆𝑡 [(𝐴1 + 𝐴2 ) cos 𝑔𝑡 + 𝑖(𝐴1 − 𝐴2 ) sin 𝑔𝑡]
Putting (𝐴1 + 𝐴2 )= A and 𝑖 (𝐴1 − 𝐴2 )= B, we have,
y = 𝑒 −𝜆𝑡 (Acos 𝑔𝑡 + 𝐵 sin 𝑔𝑡)
if A, B and ao are related as,
Then,
y = 𝑒 −𝜆𝑡 (𝑎𝑜 cos 𝑔𝑡 .
𝐴
𝑎𝑜
+ 𝑎𝑜 sin 𝑔𝑡 .
𝐵
𝑎𝑜
)
y = 𝑒 −𝜆𝑡 (𝑎𝑜 cos 𝑔𝑡 . sin 𝜑 + 𝑎𝑜 sin 𝑔𝑡 . cos 𝜑)
So, y = 𝑎𝑜 𝑒 −𝜆𝑡 sin(𝑔𝑡 + 𝜑) …………………………………(13)
Equation (13) is the equation of damped harmonic oscillator with
amplitude 𝑎𝑜 𝑒 −𝜆𝑡 . Here the gradual damping of the oscillation occurs.
Forced Vibrations:
The time period of a body executing SHM depends upon the dimensions of the
body and its elastic properties. When the body oscillates in a medium like air, its
oscillations get damped, i.e., its amplitude falls exponentially with time to zero
due to dissipation of energy.
If some external periodic forces is applied to the oscillator continuously, it
continues to oscillate under the influence of this external force. Such vibrations
of the body is called forced vibrations.
Initially, the amplitude of the swing increases, then decreases with time, becomes
minimum and again increases. This will be repeated if the external periodic force
is constantly applied on the system. In such cases, the body will finally be forced
to vibrate with the same frequency as that of applied force.
The frequency of the forced vibration is different from the natural frequency of
vibration of the body. The amplitude of the forced vibration of the body depends
on the difference between the natural frequency and the frequency of the applied
force. The amplitude will be large if the difference in frequency is small and vice
versa.
Let the periodic force which is applied on a damped harmonic oscillator be
written as,
F = Fo sin 𝑝𝑡
This is obviously a sinusoidal force of amplitude Fo and frequency
Now, the damping or restoring force on the oscillator are - b
𝑝
2
.
dy
dt
and –ay
respectively where b and a have same meaning. Hence the equation of motion for
forced vibration may be written as,
d2 y
m
dy
= -ay - b
dt2
d2 y
m
dt2
d2 y
dt2
d2 y
dt2
+
+b
dy
𝑚 dt
Where, 2𝜆 =
+
dy
dt
𝑏
𝑚
+F
+ ay = Fo sin 𝑝𝑡
dt
𝑏 dy
+ 2𝜆
dt
a
m
y=
2
+
,
2
Fo
𝑚
sin 𝑝𝑡
y = fo sin 𝑝𝑡 ……………………………(1)
=
a
m
and fo =
Fo
𝑚
Here, p = angular frequency of the applied periodic force.
The particular solution of equation (1) representing forced vibration is,
y = Asin(𝑝𝑡 − )……………………………………………..……(2)
Where, A is the amplitude and is the possible phase difference between the
applied force and the displacement of the oscillator. Then,
dy
= Apcos(𝑝𝑡 − )………………………………………..(3)
dt
And
d2 y
dt2
= - Ap2sin(𝑝𝑡 − )……………………………………….(4)
Substituting (3) and (4) into (1),
- Ap2sin(𝑝𝑡 − )+ 2λ Apcos(𝑝𝑡 − ) +
2
Asin(𝑝𝑡 − ) = fo sin 𝑝𝑡
A(
2
− 𝑝2 ) sin(𝑝𝑡 − ) + 2λ Apcos(𝑝𝑡 − ) = fo sin[(𝑝𝑡 − ) + ].
A(
2
− 𝑝2 ) sin(𝑝𝑡 − ) + 2λ Apcos(𝑝𝑡 − ) = focos sin(𝑝𝑡 − )+
fosin cos(𝑝𝑡 − )…..(5)
Equating the components of sin(𝑝𝑡 − ) and cos(𝑝𝑡 − ),
2
A(
− 𝑝2 ) = focos ………………………………………… (6)
And, 2λ Ap = fosin
………………………………………… (7)
Squaring and adding (6) and (7),
𝐴2 (
2
− 𝑝2 )2 + 4𝜆2 𝐴2 𝑝2 = 𝑓𝑜 2 𝑐𝑜𝑠 2 + 𝑓𝑜 2 𝑠𝑖𝑛2
2
𝐴2 [( 2 − 𝑝2 ) + 4𝜆2 𝑝2 ] = 𝑓𝑜 2
So, 𝐴2 =
𝑓𝑜 2
2
[( 2 − 𝑝2 ) + 4𝜆2 𝑝2 ]
That means, the amplitude of the driven force is,
A=
𝑓o
2
√[( 2 − 𝑝2 ) + 4𝜆2 𝑝2 ]
…………………………………………..(8)
Now, by (7) / (6),
tan =
𝑓o sin
𝑓o cos
=
2λ Ap
A( 2 − 𝑝 2 )
=
2λ p
( 2 − 𝑝2 )
The phase difference is,
= tan−1 {
2λ p
}
( 2 − 𝑝2 )
………………………………………………(9)
From (2),
y=
𝑓o
2
√[( 2 − 𝑝2 ) + 4𝜆2 𝑝2 ]
2λ p
}
( 2 − 𝑝2 )
sin [𝑝𝑡 − tan−1 {
] ……………..(10)
Now, because of the presence of the term fo sin 𝑝𝑡 which contains neither the
variable y nor its derivative. Equation (1) is an inhomogeneous differential
equation and hence y = Asin(𝑝𝑡 − ) is not really its complete solution. The
solution will be therefore, be complete only if we add to it a complementary
function which is a solution of the related as we know is,
y = ao 𝑒 −𝜆𝑡 sin(𝑔𝑡 + 𝜑)
Which represents the damped harmonic oscillation.
Thus the complete solution is,
y = ao 𝑒 −𝜆𝑡 sin(𝑔𝑡 + 𝜑) + Asin(𝑝𝑡 − )
Finally,
y = ao 𝑒 −𝜆𝑡 sin(𝑔𝑡 + 𝜑) +
𝑓o
2
√[( 2 − 𝑝2 ) + 4𝜆2 𝑝2 ]
sin [𝑝𝑡 − tan−1 {
2λ p
}
( 2 − 𝑝2 )
]
Maximum displacement of a driven oscillator/ Resonance:
The state of vibration when the amplitude of the driven oscillation is maximum
is called resonance. The particular frequency for which resonance takes place is
called resonant frequency.
When the damping i.e., λ has a finite value greater than zero, then the value of
amplitude will be maximum when the denominator in the equation of A has its
minimum value.
So,
2
[( 2 − 𝑝2 ) + 4𝜆2 𝑝2 ] = 0
𝑑𝑝
𝑑
−( 2 − 𝑝2 ).2p + 4𝜆2 . 2𝑝 = 0
( 2 − 𝑝2 ) = 2𝜆2
𝑝2 =
2
− 2𝜆2
∴ 𝑝 = √ 2 − 2𝜆2
Thus the amplitude will be maximum when the driven frequency
Let us denote this particular value of frequency by
𝑝𝑟
2
.
𝑝
2
=
√ 2 − 2𝜆2
2
.
In the absence of damping, resonance takes place when the natural undamped
frequency of the oscillator is equal to the frequency of the driven force. But when
damping is present, the resonant frequency
𝑝
2
=
√ 2 − 2𝜆2
2
is smaller than the
natural, undamped frequency .
2
Substituting 𝑝𝑟 = √ 2 − 2𝜆2 for p in the expression A will give maximum
amplitude.
𝐴𝑚𝑎𝑥 =
𝑓o
2
√[( 2 − 𝑝2 ) + 4𝜆2 𝑝2 ]
𝐴𝑚𝑎𝑥 =
𝑓o
2
√[( 2 − ( 2 − 2𝜆2 )2 ) + 4𝜆2 ( 2 − 2𝜆2 )]
𝐴𝑚𝑎𝑥 =
𝐴𝑚𝑎𝑥 =
𝐴𝑚𝑎𝑥 =
𝑓o
√4𝜆4 +4𝜆2 2 −8𝜆4
𝑓o
√4𝜆2 2 −4𝜆4
𝑓o
√4𝜆2 ( 2 − 𝜆2 )
𝑓o
∴ 𝐴𝑚𝑎𝑥 =
2𝜆√(
2
2
− 𝜆 )
i. If there is no damping, i.e., 𝜆 = 0, then the amplitude tends to infinity (𝐴𝑚𝑎𝑥 ⟶
∞). This never happens since damping is never actually zero.
ii. When 𝜆2 ≪
2
then 𝐴𝑚𝑎𝑥 =
𝑓o
2𝜆
iii. 𝐴𝑚𝑎𝑥 is also controlled by the factor ( 2 − 𝑝2 ), that means A depends upon
the relative values of and p. A vanishes for both p > and p < .
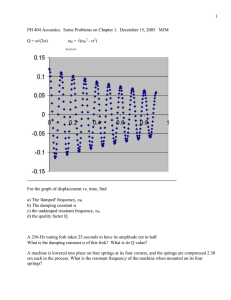
Sharpness:
The sharpness of resonance is regarded as a measure of the rate of fall of
amplitude from its maximum value at the resonant frequency on either side of it.
1. The sharp the fall in amplitude, the sharper the resonance.
2. The smaller the damping, the sharper the resonance.
Velocity amplitude of forced oscillation:
When a system oscillates under an external force Fosinpt, the displacement of the
forced oscillation at any time is given by,
y=
𝑓o
sin(𝑝𝑡 − )
2
√[( 2 − 𝑝2 ) + 4𝜆2 𝑝2 ]
where, 2𝜆 =
𝑏
𝑚
2
,
k
=
and fo =
m
Fo
𝑚
Therefore, the instantaneous velocity,
dy
dt
=V=
𝑓o p
2
√[( 2 − 𝑝2 ) + 4𝜆2 𝑝2 ]
cos(𝑝𝑡 − )
V = Vo cos(𝑝𝑡 − )
The velocity will be maximum, when 𝑐𝑜𝑠(𝑝𝑡 − ) = 1.
So, Vo =
𝑓o p
2
√[( 2 − 𝑝2 ) + 4𝜆2 𝑝2 ]
This is the expression of the velocity amplitude of a driven oscillator.
At very low driven frequency, p <<
, then we can write,
Fo
Vo =
𝑓o p
2
√[( 2 − 𝑝2 ) + 4𝜆2 𝑝2 ]
=
𝑓o p
2
𝑝𝑚
𝑝Fo
= k =
𝑘
m
Here, velocity amplitude is governed by the force constant. At very high driving
frequency p >> , then we can write the velocity amplitude,
Vo =
𝑓o p
𝑝2
=
𝑓o
p
Fo
=
𝑚
p
=
Fo
𝑝𝑚
.