Chapter-VI
6.1
INTRODUCTION
This chapter provides necessary background for edge detection which is a
sub process of image segmentation. Image segmentation is the process of dividing
the image into regions or segments which are dissimilar in certain aspects or features
such as colour, texture or gray level. Edge detection is an important task in image
processing and it is a type of image segmentation technique where edges are
detected in an image.
Edges are introduced as a set of connected points lying on the boundary
between two regions. The edges represent object boundaries and therefore can be
used in image segmentation to subdivide an image into its basic regions or objects.
The techniques discussed in this chapter provide a general application oriented
framework in which both spatial and frequency domains are analyzed to achieve
proper edge detection. Fundamentally, an edge is a local concept whereas a region
boundary is a more global idea due to its definition. A reasonable definition of edge
requires the ability to measure gray-level transitions in a meaningful way.
Edge pixels are pixels at which the intensity of an image function varies
abruptly and edges are a set of connected edge pixels. Edge detectors are local
image processing methods designed to detect edges. In a function, singularities
can be characterized easily as discontinuities where the gradient approaches
infinity. However, image data is discrete, so edges in an image are often defined
as the local maxima of the gradient [Gonzalez & Woods, 2008].
6.2 GOAL OF EDGE DETECTION
Edges produce a line drawing from an image of that scene. Some important
features that can be extracted from the edges of an image are lines, curves and
corners. These features are used by higher level computer vision algorithms.
127
6.2.1
Causes of intensity changes in images
The various factors that contribute to intensity level changes are
Geometric events
Object boundary (discontinuity in depth and/or surface color and texture)
Surface boundary (discontinuity in surface orientation and/or surface color
and texture)
Non-geometric events
6.3
Specularity (direct reflection of light, such as a mirror)
Shadows (from other objects or from the same object)
Inter-reflections between objects
MODELS OF EDGES
There are several ways to model edges and the number of approaches used
for edge detection are discussed and these edge models are classified based on
their intensity profiles.
(a)
(b)
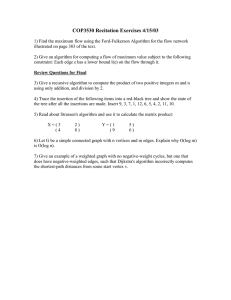
Fig. 6.1. (a) Model of an ideal edge (b) model of a ramp edge
128
Figure 6.1. (a) shows step edge involving
a transition between two
intensity levels occuring ideally over the distance of 1 pixel.Step edges occur in
images generated by a computer for use in areas such as solid modelling and
animation.Figure 6.1. (b) shows a model of intensity of ramp profile where the
slope of the ramp is inversely proportional to the degree of blurring in the edge. In
practice, digital images have edges that are blurred and noisy,with the degree of
blurring detemined principally by the electronic components of the imaging
system [Gonzalez & Woods, 2008].
6.4
OVERVIEW OF EDGE DETECTION
Edge is a boundary between two homogeneous regions. The gray level
properties of the two regions on either side of an edge are distinct and exhibit some
local uniformity or homogeneity between them. Typical analysis and detection of
edges can be done using derivatives with their magnitude and direction.
•
Magnitude of the derivative: measure of the strength/contrast of the edge
•
Direction of the derivative vector: edge orientation
An edge is typically extracted by computing the derivative of an image
intensity function. Derivatives of digital function are defined in terms of differences.
There are various ways to approximate these differences: first order and second
order derivative.
Fig. 6.2 Image of variable intensity and their horizontal intensity profile with its
first and second order derivative.
129
Figure 6.2 shows an image of variable intensity,details near the edge
showing the horizontal intensity profile with its first and second order derivatives.
6.4.1
First order derivative
The approximation of the first order derivative at a point
dimensional function
Taylor series about
of one-
is obtained by expanding the function
and letting
into
and the digital difference can be drawn
considering only the linear terms. The first order derivative of the function
be expressed as
or as
, can
and it is the slope of the tangent line to the
function at the point . Computing the first order derivative: Finite difference in 1D
function
is given by
Computing the first order derivative: Finite difference in 2D function
is given by
When computing the first order derivative at a location , the value of the
function at that point is subtracted from the next point.
6.4.2 Second order derivative
The second derivative of a function is the derivative of the derivative of that
function. The first derivative of the function decides whether the function
is
increasing or decreasing similarly second order derivative decides whether the
function
is increasing or decreasing.
Computing the second order derivative: Finite difference of 1D function
is given by
(6.3)
Computing the second order derivative: Finite difference of 2D function
along
and
directions are given by
130
(6.4)
(6.5)
6.4.3
Analysis of first and second order derivatives
First order derivative produces thicker edges whereas second order
derivative has a stronger response to fine details, thin lines, isolated points, noise
and produces double edge response. In addition second order derivative provides
zero crossing (transition from positive to negative and vice-versa) and is considered
as a good edge detector.
There are two additional properties of a second order derivatives around an edge
•
It produces two values for every edge in an image
•
Its zero crossing can be used for locating the centers of thick edges.
•
It is more sensitive to noise.
Computation of second order derivative requires both previous and
successive points of the function and is capable of detecting discontinuities such as
points, lines and edges. The segmentation of an image along the discontinuities is
achieved by running a mask through an image. The generalized
spatial domain is given in Table 6.1.
Table 6.1.
Mask.
W1
W2
W3
W4
W5
W6
W7
W8
W9
131
mask in
The response of the mask is given by
(6.6)
∑
‘
’ is the intensity of the pixel whose spatial location corresponds to the location of
the
coefficient in the mask.
6.5
TECHNIQUES OF EDGE DETECTION
Edges characterize object boundaries and are therefore useful for
segmentation, registration and object identification in image analysis. The two
different techniques are categorized as
(i)
Spatial domain techniques
(ii)
Transform domain techniques
Each of these two techniques are covered in detail in the two subsections:
6.5.1
Spatial Domain Techniques of Edge Detection
This section focuses on spatial domain techniques of edge detection where
the magnitude of the gradient determines the edges. Due to wealth of information
associated with edges, edge detection is an important task for many applications
related to computer vision and pattern recognition. The features of edge detection
are: Edge strength and Edge orientation. Edge strength determines the magnitude of
the edge pixel and edge orientation provides the angle of the gradient. The
magnitude of the gradient is zero in uniform regions of an image and has a
considerable value based on intensity level variations.
The edge detectors in spatial domain are categorized into gradient based
which determines edges based on first order derivate and Laplacian based which
locates edges based on second order derivate. The gradient is defined as a two
dimensional column vector and the magnitude of the gradient vector is referred to as
gradient. The strength of the response of a derivative operator is proportional to the
degree of discontinuity of an image at the point at which the operator is applied.
Thus, image differentiation enhances edges and other discontinuities such as noise
132
and deemphasizes areas with slowly varying gray-level values. It is observed that
the first- and second-order derivatives have the capability to encounter a noise, a
point, a line, and then the edge of an object. For an image
the magnitude of
the gradient is given by
[ ]
(6.7)
(6.8)
[( )
( ) ]
(6.9)
by approximating the squares and square root by absolute values, mag(
|
|. The direction of the gradient vector is given by
direction of an edge at
|
|
* +. The
is perpendicular to the direction of the gradient vector
at the point. The first order derivatives produce thick edges and enhance prominent
details. The edges are obtained by applying appropriate filter mask
for an image
and is given by
[
The center point
]
denotes
and
indicates
so on. The gradient operators are represented by masks
gradient of an image
and
and
, which measure
in two orthogonal directions. The bidirectional
gradients of an image are represented by inner products of an image and masks
and
6.5.1.1 Roberts Operator
This operator was one of the first and foremost edge detectors and was
proposed by Roberts. As a differential operator the idea behind Roberts cross
operator is to approximate the gradient of an image through discrete differentiation
which is obtained by computing the sum of the squares of the differences between
133
diagonally adjacent pixels. To perform edge detection through the Roberts operator,
convolution of the original image with the following two kernels is done:
*
+ &
*
+
6.5.1.2 Sobel Operator
At each point in an image, the result of the Sobel operator is either the
corresponding gradient vector or the norm of this vector. The Sobel operator is
based on convolving the image with an integer valued filter in horizontal, vertical
directions and is inexpensive in terms of computations. This operator performs a 2D spatial gradient measurement on an image and so emphasizes regions of high
spatial frequency that correspond to edges. Typically it is used to find the
approximate absolute gradient magnitude at each point in an input gray scale
image. The magnitude of the Sobel gradient operator is given by
√
.
[
]
[
&
]
The magnitude is represented by
[ ]
[
By approximation
]
| |+| |
(6.10)
(6.11)
6.5.1.3 Prewitt Operator
The Prewitt operator is based on convolving the image with a small integer
valued filter in horizontal and vertical directions. Thus, the gradient approximation
which it produces is relatively crude, in particular for high frequency variations in
the image.
134
The magnitude of the Prewitt gradient operator is given by
√
[
where
[ ]
]
[
&
[
]
]
(6.12)
6.5.1.4 Canny Operator
The drawback of the above methods is that, a fixed operator cannot be used
to obtain optimal result. A computational approach was developed and an optimal
detector can be approximated by the first order derivative of a Gaussian [Canny,
1986]. His analysis is based on step-edges corrupted by additive Gaussian noise and
the image is smoothened by Gaussian convolution. Canny has proved that the first
order derivative of the Gaussian closely approximates the operator that optimizes the
product of signal-to-noise ratio and localization. This edge detection technique
produces edges from two aspects – edge gradient direction and strength, with good
SNR and edge localization performance [Jun Li & Sheng Ding, 2011]. Thus the
algorithm is computed by
and
using Gaussian function
(6.13)
(6.14)
is the derivate of
with respect to :
is the derivate of
with respect to :
The magnitude of the gradient is computed by
√
which includes non-maxima suppression and hysteresis thresholding. Due to
multiple responses, edge magnitude
may contain wide ridges around the local
135
maxima and it removes non-maxima pixels preserving the connectivity of the
contours through non-maxima suppression. It combines both the derivative and
smoothing properties through Gaussian function in an optimal way to obtain good
edges. Hysteresis thresholding receives non-maxima suppression output and
identifies weak, strong and moderate pixels based on thresholding. The performance
of the Canny algorithm relies on parameters like standard deviation for the Gaussian
filter, and its threshold values.
This Canny algorithm uses an optimal edge detector based on a set of
criteria, which includes finding the most edges by minimizing the error rate,
marking edges as closely as possible to the actual edges to maximize localization,
and marking edges only once when a single edge exists for minimal response.
According to Canny, the optimal filter that meets all the three above criteria above
can be efficiently approximated using the first derivative of a Gaussian function.
1) The first stage involves smoothing the image by convolving with a Gaussian
filter.
2) This is followed by finding the gradient of the image by feeding the smoothened
image through a convolution operation with the derivative of the Gaussian in
both the vertical and horizontal directions. Both the Gaussian mask and its
derivative are separable, allowing the 2-D convolution operation to be
simplified.
3) The non-maximal suppression stage finds the local maxima in the direction of
the gradient, and suppresses all others, minimizing false edges. The local
maxima are found by comparing the pixel with its neighbours along the direction
of the gradient. This helps to maintain the single pixel thin edges before the final
thresholding stage [Shirvakshan & Chandrasekar, 2012].
4) Instead of using a single static threshold value for the entire image, the Canny
algorithm introduced hysteresis thresholding, which has some adaptively to the
local content of the image. There are two threshold levels,
where
. Pixel values above
high and
, low
value are immediately classified as edges.
By tracing the edge contour, neighboring pixels with gradient magnitude values
less than
can still be marked as edges as long as they are above
. This
process alleviates problems associated with edge discontinuities by identifying
136
strong edges, and preserving the relevant weak edges, in addition to maintaining
some level of noise suppression. While the results are desirable, the hysteresis
stage slows the overall algorithm down considerably.
6.5.1.5 Laplacian Operator
The Laplacian method searches for zero crossings in the second derivative of
the image to find edges. An edge has the one-dimensional shape of a ramp and
calculating the derivative of an image can highlight its location [Raman Maini &
Himanshu Aggarwal, 2010]. The Laplacian based edge detection for an image
is based on second order derivatives and is given by
(6.15)
The second order derivative is more aggressive than first order derivative in
enhancing sharp changes and has a stronger response to fine details. This operator
enhances fine details and is unacceptably sensitive to noise; the magnitude of the
Laplacian produces double edges but fails to detect edge direction. Edges are formed
from pixels with derivative values that exceed a preset threshold. The strength of the
response of a derivative operator is proportional to the degree of discontinuity of an
image at the point at which the operator is applied. Thus, image differentiation
enhances edges and other discontinuities such as noise and deemphasizes areas with
slowly varying gray-level values.
6.5.1.6 Merits and Demerits of classical operators
In summary, comparing the responses between first and second-order
derivatives, the following conclusions are arrived at (1) First-order derivatives
generally produce thicker edges in an image and have a stronger response to a graylevel step. (2) Second-order derivatives have a stronger response to fine detail, such
as thin lines, isolated points and produce double response at step changes in gray
level. In most applications, the second order derivative is better suited than the first
order derivative for image enhancement because of the ability to enhance fine detail
due to zero-crossing. The strategy is to utilize the Laplacian to highlight fine detail,
and the gradient to enhance prominent edges. The performance of these partial
137
derivative operators are shown in Figure.6.3 which in turn represents the results for
an image of narrowed artery nerve (defect in heart).
6.5.2 Transform domain techniques of edge detection
The transform domain technique seems to be promising as there is no loss of
edge information and helps in shape and contour tracking problem. The transform
domain techniques of edge detection were developed to work for noisy images.
Although the maxima of the modulus of the DWT are good approximation of the
edges in an image, even in the absence of noise there are many false edges.
Therefore a criterion must be determined to separate the real edges from the false
edges. A threshold on the intensity of the modulus maxima is a good criterion and is
described in following section. Streaking effect is the breaking up of an edge
contour caused by the operator output fluctuating above and below threshold along
the length of the contour.
6.5.2.1 Discrete Wavelet Transform approach
It is difficult to extract meaningful boundaries under noisy circumstances
directly from gray level image data, when the shapes are complex. But better results
have been achieved by first transforming the image into frequency domain
information and detecting discontinuities in intensity levels, then grouping these
edges, thus obtaining more elaborate boundaries. Though the Fourier Transform
(FT) was pioneer in transform domain, due to drawbacks of frequency domain
representation alone, the concept of wavelet a powerful tool for spectral
representation was developed for simultaneous time frequency representation. With
this development, wavelet theory is suitable for local analysis, singularity and edge
detection and have proved that the maxima of the wavelet transform modulus can
detect the location of the irregular structures. This technique has [Mallat & Hwang,
1992] refined the wavelet edge detector, in which a scale of the wavelet that adapts
to the scale of an image can be optimized and its noise level minimizes the effect of
noise on edge detection. The edges of more significance are important and are kept
intact by wavelet transforms and insignificant edges introduced by noise are
removed. Wavelet based edge detection method can detect edges of a series of
integer scales in an image. This can be useful when the image is noisy, or when
edges of certain detail or texture are to be neglected.
138
The wavelet version of the edge detection is implemented by smoothening
the surface with a convolution kernel
and is denoted as
and is
dilated. This is computed with two wavelets that are partial derivatives of :
To limit overhead the scale varies along the dyadic sequence
for
.
(
)
(6.16)
Let us denote for convenience ̅
and ̅
The dyadic wavelet transform of
(
)
at
is represented as
⟨
̅
⟩
The Discrete Wavelet Transform components are proportional to the
smoothened by ̅
coordinates of the gradient vector of
.
⃗(
/
.
̅ )
The modulus of the gradient is proportional to the wavelet transform modulus
(
)
√|
|
|
|
(6.17)
The magnitude of the wavelet transform modulus at the corresponding
locations indicates the strength of the edges caused by sharp transitions.
(
The angle of the gradient is given by
An edge point at scale
is a point, such that
)
(6.18)
(
) is locally
maximum and these points are called Wavelet Transform Modulus Maxima
(WTMM).Thus the scale space support of these modulus maxima corresponds to
multiscale edge points [Mallat, 2009].
139
Edges of higher significance are more likely to be kept by the wavelet
transform across scales. edges of lower significance are more likely to disappear
when the scale increases. A wavelet filter of large scales is more effective for
removing noise, but at the same time increases the uncertainty of the location of
edges. Wavelet filters of small scales preserve the exact location of edges, but
cannot distinguish between noise and real edges. It is required to use a larger scale
wavelet at positions where the wavelet transform decreases rapidly across scales to
remove the effect of noise, while using a smaller scale wavelet at positions where
the wavelet transform decreases slowly across scale to preserve the precise position
of the edges. Although the maxima of the modulus of the DWT are a good
approximation of the edges in an image, even in the absence of noise there are many
false edges as can be seen in Figure 4.2 (b). Therefore, a threshold on the intensity
of the maximum modulus is said to a criterion to separate the real edges from the
false edges and finally edges are retained and their characteristics are preserved
when compared to spatial domain.
6.5.2.2 Fractional Wavelet Transform approach
Unser.M & Blu.T introduced new family of wavelets based on B-Splines.
Singularities and irregular structures carry useful information in two dimensional
signals and the conventional edge detection techniques using gradient operator’s
work well for truly smooth images and not for noisy images. FrWT has all the
features of WT and it represents the signal in Fractional domain and projects the
data in time–fractional-frequency plane.
The FrWT of a 2Dfunction is given by
,
where
along
{ (
)}-
(6.19)
in equation (6.19) are dilation and translation parameters
and
directions.
It has been recognized by several researchers that there exists a strong
connection between wavelets and differential operators [Jun Li, 2003]. So, transient
features such as discontinuities are characterized by wavelet coefficients in their
neighborhood, the same way as a derivative acts locally too. One of the primary
140
reasons for the success of FrWT in edge detection application is that they can be
differentiated simply by taking finite differences. Wavelet Transform Modulus
Maxima (WTMM) developed by Mallat, carries the properties of sharp signal
transitions and singularities whereas FrWT acts as a multiscale differential operator.
The derivative like behavior of FrWT provides promising results when compared to
DWT approach.
The new family of the WT is constructed using linear combinations of the
integer shifts of the one-sided power functions:
̂
*
+
Where α is the fractional degree
(6.20)
is the gamma function. One of the
primary reasons for the success of FrWT is that they can be differentiated at
fractional order by taking finite differences. This is in contrast with the classical
wavelets whose differentiation order is constrained to be an integer. This property is
well suited for image edge detection.
The fractional derivative can be defined in Fourier domain as
̂
Where ̂
∫
(6.21)
denotes the Fourier Transform of
[Unser. M &
Blu.T, 2003]. Singularities detection can be carried out finding the local maxima of
the FrWT which is clearly evident in Figure 6.5 (c). The magnitude of the wavelet
transform modulus at the corresponding locations indicates the strength of the edges
caused by sharp transitions.
6.5.2.3 Steerable Wavelet Transform approach
An appropriate edge detection technique which ensures that the fine edges of
image without false edge detection are necessary for biomedical imagery. Machine
vision and many image processing applications require oriented filters. It is often
required to use the same set of filters for rotation at different angles and different
orientation under adaptive control. [Freeman, 1991] developed the need of designing
a filter, with filter response as a function of orientation and named it steerable. The
141
term ‘steerable’ (rotated) is used to describe a separate category of filters in which a
filter of arbitrary orientation is synthesized as linear combination of a set of basis
kernels. These filters provide components at each scale and orientation separately
and its non-aliased subbands are good for texture and feature analysis.
The steerable transform of a two dimensional function is written as linear
sum of rotated version of itself and is given by the expression as
∑
(6.22)
represents interpolation functions, ‘n’ is the number of terms required
Where
for summation. Any two filters are said to be quadrature if they possess same
frequency response and differ in phase by 90° (Hilbert Transform).The design of
quadrature pair of steerable filter is given by frequency response of second order
derivative of a Gaussian function
and its Hilbert Transform pair
These pairs
pave way for analyzing spectral strength representation of signals independent of
phase. We design steerable basis set for the second derivative of a
Gaussian
.This is the product of even parity
polynomial and a radially symmetric Gaussian function.
For edge detection the quadrature pairs set
and
are utilized. The
squared magnitude of the quadrature pair filter response steered everywhere in the
direction of dominant orientation is given by
*
A given point
+
*
+
(6.23)
is an edge point if
direction perpendicular to the local orientation
is at local maximum in the
.Steering
and
along the
dominant orientation gives the phase φ of edge points.
(6.24)
The steerable pyramid constitutes four band pass filters form a steerable
basis kernel set at each level of pyramid and these basis functions are derived by
dilation, translation and rotation of a single function. The orientation of these basis
filters were at 0°,45°,90°,135° and the coefficients of these filters obtained at any
142
orientation can also be obtained at any linear combination of these basis filters. The
original image with perfect reconstruction can be obtained, when these basis filters
are applied again at each level and the pyramid collapses to the original version
[Douglas Shy & Pietro Perona, 1994].
It consists of permanent, dedicated basis filters, which convolve the image as
it comes in, their outputs are multiplied by gain masks with appropriate interpolation
functions at each time and position and the final summation produces adaptively
steered filter. Steerable filters are useful in various tasks: shape from shading,
orientation and phase analysis, edge detection and angularly adaptive filtering
[Freeman et. al., 1991]. The focus of this paper is to provide edge detection
technique with good visual perception, undoubtly it is provided by steerable filters
by avoiding spurious edges caused by noise and detecting real edges. Simulation
results were performed to demonstrate the edge detections of images are shown in
Figure 6.5 (e,f,g) and that this technique of using Steerable Wavelet Transform
competes with other transform can be observed by means of visual perception.
6.6
INFLUENCE OF NOISE ON EDGE DETECTION
The principal sources of noise in digital images arise during image
acquisition and/or transmission. The performance of imaging sensors is affected by a
variety of factors, such as environmental conditions during image acquisition and by
the quality of the sensing elements themselves. For instance, in acquiring the images
with a CCD camera, light levels and sensor temperature are major factors affecting
the amount of noise in the resulting image.
Edges in images are susceptible to noise and this is due to the fact that the
edge detector algorithms are designed to respond to sharp changes, which can be
caused by noisy pixels. Noise may occur in digital images for a number of reasons.
The most commonly studied noises are white noise, salt & pepper noise and speckle
noise. To reduce the effects of noise, preprocessing of the image is required. The
preprocessing can be performed in two ways, filtering the image with a Gaussian
function, or by using a smoothing function. The problem with the above approaches
is that the optimal result may not be obtained by using a fixed operator. Simulation
results were carried out to discuss the influence of noise on edge detection and the
performance of edge detectors are discussed in forthcoming topics.
143
6.7
SIMULATION RESULTS
In a 2-D image signal, intensity is often proportional to scene radiance,
physical edges corresponding to the significant variations in reflectance,
illumination, orientation and depth of scene surfaces are represented in the image by
changes in the intensity function. Some types of edges results from various
phenomena; for example when one object hides another, or when there is shadow on
a surface. Noises are unwanted contamination that is intruded in an image
acquisition because of several factors: such as poor illumination settings, sensors
fault etc. The detection of edges are challenging task in noisy images. These are
demonstrated through numerical results in this section.
6.7.1
Numerical Results of edge detection using spatial domain techniques
The performance of various edge detectors in spatial domain are validated
for biomedical images such as narrowed artery nerve of a human heart and for an
iris image with cancer tissues are shown in Figure 6.3 and 6.4 respectively. These
operators are widely used for their simplicity.
(a) Narrowed artery nerve
of a human heart
(b) Prewitt image
(c)Canny image
(d) Laplacian image
(e) Sobel image
(f) Roberts image
Fig. 6.3: Performance of edge detectors for an image of narrowed artery nerve in
spatial domain.
144
(a)Iris image with cancer
(b) Prewitt image
(c)Canny image
(d) Laplacian image
(e) Sobel image
(f) Roberts image
Fig. 6.4: Performance of edge detectors for an iris image with cancer tissues in
spatial domain
The Roberts exhibits poor performance and Prewitt, Sobel performs
moderately whereas Canny’s edge detection algorithm provides better performance
but requires more overhead when compared to Sobel, Prewitt and Robert’s operator.
The Canny operator provides better results and spurious edges can be avoided by
hysteresis thresholding and can detect edges of an image but fails to detect lines.
The advantages of the zero crossing operators (Laplacian) are detecting edges and
their simple orientations, due to the approximation of the gradient magnitude and
their possession of fixed characteristics in all directions. The disadvantages of these
operators are sensitivity to the noise and detecting the edges and their orientations of
noisy image eventually degrading the magnitude of the edges.
6.7.2
Numerical Results of edge detection using spatial domain techniques
with noise
The influences of noise on biomedical images are discussed by taking into
consideration salt and pepper noise.
145
(a) Noisy image
(b) Prewitt image
(c)Canny image
(d) Laplacian image
(e) Sobel image
(f) Roberts image
Fig. 6.5: Performance of gradient edge detectors for image of narrowed artery
nerve with noise
(a) Noisy image
(b) Prewitt image
(c)Canny image
(d) Laplacian image
(e) Sobel image
(f) Roberts image
Fig 6.6: Performance of gradient edge detectors of an iris image with cancer
tissues influenced by noise
146
The primary advantages of the classical operator are simplicity but most of
these partial derivative operators are sensitive to noise. Use of these masks result in
thick edges or boundaries, in addition to spurious edge pixels due to noise. The
increase of noise in an image will eventually degrade the magnitude of the edges.
The streaking effect can be observed with noise, it is an effect caused due to
breaking up of edge contours. The major disadvantage is the inaccuracy, as the
gradient magnitude of the edges decreases; accuracy also decreases as shown in
Figure 6.5 and 6.6. The second disadvantage is that, the operation gets diffracted by
some of the existing edges in the noisy image. These gradient based operators
produce false edges in and around salt and pepper noise. The Prewitt and Roberts
operator completely fails for noisy images. Moderate performances are observed by
Laplacian and Sobel and much better results are obtained by Canny.
6.7.3 Numerical Results of edge detection using transform domain techniques
(a)Narrowed artery nerve
of a human heart
(b) DWT image
(d) Steerable wavelets
(c) FrWT image
(e)Steerable wavelets with
(f)Adaptively oriented
refined features
steered filtering
Fig. 6.7. Performance of gradient edge detectors for an image of narrowed artery
nerve in transform domain
147
The tumor cells in eye do not only supply blood to the photoreceptors (rods
and cones) of the retina and enables ophthalmologist to treat patients with large
tumors. The edge detection techniques help to diagnose whether the cells are benign
and malignant type and generally treated with enucleation, with or without
preoperative radiation.
(a)Cancer affected iris
image
(b) DWT image
(c) FrWT image
(d) Steerable wavelets
(e)Steerable wavelets with
(f)Adaptively oriented
refined features
steered filtering
Fig. 6.8: Performance of gradient edge detectors of an iris image with cancer
tissues in transform domain
As most of the gradient operators fail to detect edges of an image with
noises, some of the transform domain techniques discussed here are: DWT, FrWT,
StWT. These transforms extract salient features of the scene with no loss of edge
information when compared to spatial domain techniques and do not produce false
edges and are observed in Figure 6.7 and 6.8. As natural images contain spots, lines
and edges it is optimal to find an edge detector which responds to images with noise.
FrWT and StWT which possess local energy measure provides peak responses at
points of constant phase as a function of spatial frequency and corresponds to edge
148
points where human observers localize contours [Simina Emerich, 2008]. It is
further observed that edges are well covered visually but textures and fine structures
are removed in DWT domain. In FrWT and StWT operated images the textures and
fine structures are observed which clearly states the superiority of transform domain.
By use of angularly adaptive filtering the denoising and enhancement of orientated
structures can be done simultaneously.
6.7.4
Numerical results of edge detection using transform domain techniques
with noise
The transform domain techniques outperform the gradient operators under
noisy environment which are evident in Figure 6.9.
(a)Narrowed artery nerve
with Salt & Pepper noise
(b) DWT image
(c) FrWT image
(d) Steerable wavelets
(e) Steerable wavelets
with refined features
(f) Adaptively oriented
steered filtering
Fig 6.9: Performance of gradient edge detectors for an image of narrowed artery
nerve with noise
149
(a)Cancer affected iris
image with Salt & Pepper
noise
(b) DWT image
(c) FrWT image
(d) Steerable wavelets
(e) Steerable wavelets
(f) Adaptively oriented
with refined features
steered filtering
Fig 6.10: Performance of gradient edge detectors of an iris image with cancer
tissues influenced by noise in transform domain
The edges are not affected by streaking effect due to noise in transform
domain which is essential in biomedical applications. The steerable wavelet based
edge detector which has adaptive in nature is used to eliminate streaking of edge
contours and is evident in the Fig.6.10. The physician can vary the scale based on
the level of details required and view the delicate details of the artery nerve and
cancer tissues in eye and arrive at an amicable solution for subsequent treatments.
Thus decision making is simple and eases him to diagnose most sensitive issues
related to heart and eye diseases.
150
6.8
SUMMARY
Comparison of various edge detection techniques and to analyze the
performance of the various techniques under noisy conditions are evaluated. The
classical operators possess some of the features like simplicity, detection of edges
and their orientations, sensitivity to noise and are inaccurate. In this chapter,
different approaches of edge detection techniques like Gradient-based, Laplacian
based and Transform domain based techniques are presented. Edge detection
techniques are compared with case studies of identifying a narrowed artery nerve of
a human heart and iris image with cancer cells which provides the physician,
information in making decision to perform Coronary Artery Block Surgery or Stent
placement and in case of iris cells, assists to categorize whether benign and
malignant tissues are present and to treat with enucleation(removal of the eye), with
or without preoperative radiation.
Gradient-based algorithms have major drawback as they are sensitive to
noise. The dimension of the kernel filter in spatial domain and its coefficients are
static and it cannot be adapted to a given image. It has been observed that evaluation
of spatial domain operators like Canny, Laplacian, Sobel, Prewitt, Roberts’s
exhibited poor performance with noise. Though Laplacian performs better for some
features, it suffers from mismapping which represents edges. The edges are not
continuous hence called streaking effect is severe in noisy images.
Performance evaluation of edge detection techniques with DWT, FrWT and
StWT were discussed. The fine to coarse information related to edge detection can
be obtained through DWT based edge detection which provides the band passed
representation, with threshold limits. Computational tasks in FrWT such as
differentiation, integration and search for extrema are quite simple in transformed
coefficients. The noise components are optimally separated and hence FrWT
provides perfect localization. These estimating derivatives are helpful in edge
detection and the edge points are well localized. Thus it is less sensitive to noise and
provides robust edge detection with adjustable scale parameter which will be helpful
for the physician to diagnose the intensity of the disease with ease.
151
The steerable filters can measure local orientation, direction, strength and
phase at any orientation provides sophisticated results as these filters are oriented
and non-aliased subbands provide us elegant edge detection and can be used for
texture and feature analysis of the image. Further it is concluded that FrWT & StWT
are convenient and perspective tools for edge detection analysis in bio-medical
domain problems. The problem of streaking effect was addressed in spatial domain
and predominantly suppressed and visualized in FrWT and StWT domain.
152