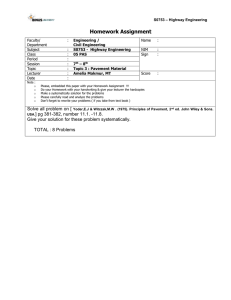
Road Materials and Pavement Design ISSN: (Print) (Online) Journal homepage: https://www.tandfonline.com/loi/trmp20 Prediction of asphalt pavement condition using FWD deflection basin parameters and artificial neural networks Vidhi Vyas, Ajit Pratap Singh & Anshuman Srivastava To cite this article: Vidhi Vyas, Ajit Pratap Singh & Anshuman Srivastava (2021) Prediction of asphalt pavement condition using FWD deflection basin parameters and artificial neural networks, Road Materials and Pavement Design, 22:12, 2748-2766, DOI: 10.1080/14680629.2020.1797855 To link to this article: https://doi.org/10.1080/14680629.2020.1797855 Published online: 27 Jul 2020. Submit your article to this journal Article views: 480 View related articles View Crossmark data Citing articles: 4 View citing articles Full Terms & Conditions of access and use can be found at https://www.tandfonline.com/action/journalInformation?journalCode=trmp20 ROAD MATERIALS AND PAVEMENT DESIGN 2021, VOL. 22, NO. 12, 2748–2766 https://doi.org/10.1080/14680629.2020.1797855 Prediction of asphalt pavement condition using FWD deflection basin parameters and artificial neural networks Vidhi Vyas, Ajit Pratap Singh and Anshuman Srivastava Civil Engineering Department, Birla Institute of Technology and Science, Pilani, India ABSTRACT ARTICLE HISTORY Applications of non-destructive testing devices such as Falling Weight Deflectometer (FWD) provide crucial estimates of pavement health that assist in the optimisation of pavement management systems. However, regularly conducting these tests at a network level and post-processing of the collected data is cumbersome, which requires technical expertise, significant time, funds, and other resources. Due to this structural aspect of pavements during the selection of maintenance or repair, decisions are often ignored. This study attempts to develop reliable correlations for estimates of two different deflection basin parameters using a number of structural, functional, environmental, and subgrade soil attributes as input. The data has been obtained through field tests over a 124 km long pavement network. Different artificial neural network-based models are trained by varying the number of hidden layers and neurons in these layers, for the above-mentioned purpose. The coefficient of determination and mean square error is decisive for the selection of best network architecture. These outcomes are also compared to the results of the classical multiple linear regression method, and the superiority of neural networks over nonintelligent approaches for non-linear problems of pavement engineering is appreciated. In addition to this, the results justify the fact that the properties of the asphalt layer predominantly impact the entire pavement condition. The proposed approach is an alternative way to facilitate quick pavement condition assessment by reducing the frequency of deflection testing without compromising with the accuracy of its estimates. It would encourage the increased application of structural condition data in pavement maintenance and rehabilitation necessities with ease. However, the study does not intend to completely avoid conducting deflection testing and serve as a base for future studies. Received 6 October 2019 Accepted 13 July 2020 KEYWORDS Artificial neural networks; pavement condition assessment; falling weight deflectometer; non-destructive testing; pavement management systems Introduction Failure of pavements pre-maturely or towards the end of their design life, due to poor design, construction, or maintenance practices, necessitates a robust decision-making strategy to meet their maintenance or rehabilitation needs. Pavement Management Systems (PMS) involves a holistic approach towards the activities concerned with planning, design, evaluation, and maintenance of pavements to provide economical, serviceable, and safe pavements at a network and project level. The key components of PMS include condition assessment surveys, robust databases, analysis schemes, judgment criteria, and implementation techniques (AASHTO, 1993; Peterson & Shepard, 1972). The prerequisite to maintain the high quality of pavements within the optimum budget is to update databases regularly CONTACT Ajit Pratap Singh aps@pilani.bits-pilani.ac.in © 2020 Informa UK Limited, trading as Taylor & Francis Group ROAD MATERIALS AND PAVEMENT DESIGN 2749 with the estimates of pavement performance parameters. The collection of these diverse parameters requires a rational assessment of pavements, and thus, the condition assessment surveys form the backbone of PMS. The concerned factors can be broadly categorised as those related to serviceability (roughness), structural capacity (surface deflection), surface distress (variety of pavement distresses), and safety (skid resistance). Evaluation of structural capacity can be conducted either by destructive or Non-Destructive Testing (NDT). For in-situ structural assessment of pavements and to cover their vast network, NDT methods based on deflection testing such as FWD are preferred. FWD assesses not only the structural adequacy but also provide substantial information about pavement layers and its subsurface conditions, including subgrade. Thus, most of the highway agencies perform FWD testing as a part of their routine pavement assessment procedures that are usually scheduled at periodic intervals. However, the estimation of layer moduli demands back-calculation of FWD data, and its accurate analysis requires technical expertise with exact estimates of pavement layer thicknesses, which is either done through coring or Ground Penetrating Radar (GPR) scans. The use of GPR is not a common practice in India, and coring practices require considerable time and resources. Furthermore, the practice of data acquisition at frequent intervals is indeed time-consuming, labourintensive, interrupts traffic, and expensive, hence, it is difficult to be performed repeatedly. These are possibly a few of the contributing reasons in neglecting the structural aspect of pavements during the selection of maintenance or repair decisions. Therefore, to cope up with these limitations, many efforts have been made by the researchers to find relatively quick alternative analysis methods and obtain a thorough knowledge of pavement condition, without performing rigorous back-calculation procedures. The application of Deflection Basin Parameters (DBP), which are FWD basin derived strength indicators, provides one such method of delivering rapid estimates of pavement’s structural state. Additionally, the techniques of Artificial Intelligence (AI) such as expert systems, Artificial Neural Networks (ANN), Genetic Algorithms (GA), and hybrid systems complement the analysis dealing with complex interrelationships of traffic loading, climatic conditions, and material properties in providing reasonable approximations. A preliminary attempt is made in this paper to assess the structural condition of the pavements by estimating the DBP through ANN. An alternative means is suggested for more efficient usage of DBP, and the potential of ANN modelling to determine DBP is investigated. The superiority of ANN models is highlighted by comparing their results with the multiple linear regression approach. The authors have adopted a more holistic procedure by considering the impact of structural, functional, and environmental factors, as well as factors affecting subgrade condition on various DBP. To achieve these objectives, different sets of ANN structures have been developed and tested. The intelligent approach of ANN has been attested to offer such robust models to highway agencies which would facilitate reliable decision-making of maintenance and rehabilitation treatments in a short span of time. Literature review Several studies have reported the use of NDT methods such as infrared thermography, impact echo, GPR, and FWD to analyze pavement behaviour and its different aspects including back-calculation of layer moduli, prediction of pavement strains, and layer interface bonding conditions (Bianchini, 2014; Elbagalati et al., 2018; Gopalakrishnan & Thompson, 2005; Park et al., 2005; Vyas et al., 2019). Authors have utilised pavement deflection measurements under the FWD load to serve multiple purposes. Attempts to relate deflections under FWD load by developing linear and non-linear models with parameters such as condition survey data, effective structural number, layer thickness, and equivalent axle load was made (Gedafa et al., 2012; Wu et al., 2013). Determination of elastic moduli of layers and critical strains has also been performed from FWD deflection measurements (Bilodeau & Doré, 2012; Kumlai et al., 2014; Losa et al., 2008; Plati et al., 2016). Furthermore, the mechanistic-empirical pavement design guide also necessitates FWD testing for the assessment of in-situ pavement conditions (ARA, 2004). 2750 V. VYAS ET AL. Although FWD is nowadays used regularly for structural assessment of asphalt pavements, yet it has been observed that the pavement prioritisation projects for reconstruction or rehabilitation are still primarily based only on visual identification of distresses and functional condition surveys (Papagiannakis & Masad, 2017). Assuming that poor structural health would be eventually reflected by the deterioration in functional performance indicators, the consideration of structural aspect is often ignored. In real field conditions, visual distresses usually get reflected after a major portion of the pavement structure is deteriorated. In such cases, any sort of maintenance or rehabilitation activity would be expensive and would require a substantial amount of time, resources, and efforts. On the other hand, the prior inclusion of structural condition during any decision-making process would provide warning signs during the early stages of pavement deterioration and addressing them may demand only minor repairs which would save huge funds. Vyas et al. (2019a) have made efforts in this direction, by using structural as well as functional performance parameters to propose a decisionmaking approach for pavement prioritisation based on analytic hierarchy process and fuzzy theory. In another study, the authors prioritised pavement sections on the basis of entropy weights and performed SWOT analysis for pavement maintenance and repair alternatives (Vyas et al., 2019b). However, in order to encourage this practice at a larger scale, approaches providing quick judgments regarding the deteriorated condition and its possible reasons or layers contributing to the distress generation are obligatory. In the view of the above conclusions, the most relevant and remarkable contribution of FWD testing is to encompass the DBP derived from deflections at different radial offsets, which are indicative of pavement deflection basin and eventually its strength. The commonly proposed DBP include surface curvature index, base curvature index, area under pavement profile, base damage index, base layer index, middle layer index, and lower layer index (Horak, 1987; Horak, 2008; Horak et al., 2015; Kim, 2000; Losa et al., 2008; Park et al., 2005; Xu et al., 2002a, 2002b). The significance of using DBP has been highlighted in the study carried by Kim (2000) in which these estimates were used to empirically evaluate individual layer moduli of pavements without undergoing complex back-calculation schemes. More recent studies have also adopted these estimates of the deflection basin to analyze and report the condition of pavements (Fakhri & Dezfoulian, 2019; Rabbi & Mishra, 2019; Sollazzo et al., 2017). Saleh (2016) evaluated the structural condition of pavements using area ratio and normalised area ratio from FWD deflections and concluded the normalised area ratio parameter to be highly appropriate for the structural condition of the pavements. In addition to this, researchers have also studied the impact of critical factors such as those related to structure and temperature on pavement responses using DBP (Xu et al., 2002a, 2002b). Surface distresses, and visual condition ratings were also reported to affect deflection parameters, but no analytical or mathematical model was presented to determine the relation (Horak, 2008; Horak et al., 2015). In similar works, functional performance rating indicators of pavements were studied for their correlation with structural indices (Fakhri & Dezfoulian, 2019). However, parameters such as environmental factors, traffic, and subgrade soil conditions also have leading impacts on pavement health, which are reflected in surface deflections and DBP. The inclusion of these diversified factors results in complicated pavement engineering problems, which are challenging to solve using closed-form solutions or physics-based principles (Li & Wang, 2018). Soft computing and AI based techniques including machine learning find their wide application in such real-world problems (Meier, 1995; Shafabakhsh et al., 2015; Majidifard et al., 2019; Singh et al., 2018). Alavi and Buttlar (2018) adopted genetic programming to formulate prediction model for PCI and used smartphones to collect airport pavement condition data. Previous studies supported the usage of ANN for back-calculation of pavement layer moduli and dynamic moduli of asphalt layer when pavements were subjected to FWD load (Gopalakrishnan et al., 2014; Pekcan et al., 2008; Varma & Kutay, 2016; Zaabar et al., 2014). Researchers have also adopted a hybrid of ANN and GA to develop backcalculation programme (Li & Wang, 2019; Tutumluer et al., 2009). The integration of the AI approach and FWD derived parameters is found to be quiet successful in few studies (Fakhri & Dezfoulian, 2019; Sollazzo et al., 2017). The DBP surface curvature index and the thickness of the asphalt layer were adopted to predict tensile strain in asphalt pavements (Plati et al., 2016). In another study, ROAD MATERIALS AND PAVEMENT DESIGN 2751 Table 1. Threshold ranges of layer condition for SCI and BCI (Chang et al., 2014). Layer condition threshold range (mils) Parameter Concerned layer SCI BCI Asphalt layer Base layer Very good Good Fair Poor Very poor <4 <2 4–6 2–3 6–8 3–4 8–10 4–5 > 10 >5 DBP were implemented to predict responses of asphalt pavements using ANN-based programme in combination with GA optimisation (Li & Wang, 2018). Although a lot of research has been done, the studies on the inclusion of diversified factors with AI to address the real-life challenges of field testing in pavement prioritisation are limited. Therefore, this study is an attempt to explore the amalgamation of DBP with neural networks to ease the task of data analysis and offers an attractive way to inspire the practice of incorporating strength parameters in pavement prioritisation projects. A thorough review of literature helped to ascertain typical deflection basin parameters and range of their values, as proposed by the researchers (Chang et al., 2014). Finally, to inculcate the effect of upper as well as lower pavement layers, two DBP, namely Surface Curvature Index (SCI), and Base Curvature Index (BCI) are used in conjunction with eight decision variables in this work. SCI is defined as the difference between the deflections measured by the sensor located at the centre of the load plate and another sensor located at 300 mm from the centre. This is a measure of the structural quality of the upper pavement layers, specifically asphalt layers (Kim, 2000). Similarly, BCI infers the quality of lower layers and subgrade. It is defined as the difference between the deflections measured by the sensor located 600 and 900 mm from the centre of the load plate. Thus, SCI = D0 – D300 , and BCI = D600 – D900 , where D represents the deflection measured at sensor locations (in mm) indicated at the subscript of D. Table 1 enlists threshold range of DBP used in this study, as found in the literature. Once the values of SCI and BCI are computed from the developed prediction models, the inferences about the pavement layer condition can be drawn directly by using the standard range of threshold values classified into five categories namely, very good, good, fair, poor, and very poor, as presented in Table 1. It can be concluded that small values of SCI and BCI indicate structurally sound layers in the pavement structure, and vice versa. However, the range of threshold values varies for SCI and BCI, as depicted in Table 1. Objectives and scope The study, as a whole, tries to address the problems faced by authorities of highway agencies while implementing PMS on asphalt pavement network. Multiple challenges are faced during data acquisition and analysis pertaining to the structural condition of asphalt pavements. They include difficulty in frequently performing FWD tests at a network level due to the concerns explained in the previous sections, the requirement of accurate layer thicknesses data for back-calculation of measured deflections, and unpopularity of GPR usage in India owing to its high cost. Another challenge is to promote the use of structural condition data rather than merely assessing the functional performance of pavements while making maintenance decisions. In order to address these concerns, the first objective is to reduce the frequency of conducting FWD tests by developing analytical and reliable correlations using a set of ANN models for pavement’s structural health assessment. Secondly, to maintain the simplicity of these models by keeping the fewer number of variables without causing a significant reduction in their accuracy, and alleviate the need of performing rigorous back-calculation, DBP are used instead of deflections at all geophones. This approach is relatively quick and, therefore, would encourage the usage of structural adequacy factors in determining the maintenance and rehabilitation strategies. This would eventually assist in the optimum utilisation of available funds. Finally, the study proposes the best ANN architecture for dealing with such problems. 2752 V. VYAS ET AL. In this work SCI and BCI are taken as output, and input variables include pavement structure-related factors such as thickness of asphalt layer (La ), thickness of base layer (Lb ), and total thickness of pavement (Lt ); functional performance factor such as International Roughness Index (IRI); subgrade soil strength depicting factors such as Maximum Dry Density (MDD) and California Bearing Ratio (CBR); lastly environmental factors including atmospheric temperature (Ta ), and asphalt pavement surface temperature at the time of testing (Ts ). Review of literature helped to ascertain the domains which directly or indirectly affect the structural condition of pavements (Sollazzo et al., 2017). Accordingly, the input variables are selected from the wide spectrum of important attributes. The selection also depends upon the availability and ease of collecting data for these attributes. Pertaining to the ease of conducting FWD or CBR test, it should be noted that FWD is limited in its availability while CBR is widely available. Due to the limited availability of FWD for conducting field inspections anywhere in the country, it needs to be transported from place to place. Performing this task repeatedly is neither easy nor economical, and needs proper planning along with sufficient funds. On contrary, conducting CBR tests is relatively easy and economical since it can be performed at multiple places due to its wide availability. The advantage of developing a prediction model is that in case of difficulty in procuring any particular device or conducting test, the particular parameter can be dropped off from the model. Whereas no such flexibility would be available with FWD tests which would require to follow the entire procedure everytime, from collecting the data to analyze it using back-calculation. The present study aims to provide an approach to alleviate the need of conducting FWD tests repeatedly. It offers an idea to incorporate the parameters from diverse field to develop the robust prediction models which are highly flexible in nature since its parameters can be suitably varied or modified according to the intended problem. The complete methodology is demonstrated by using the selected set of parameters. However, the input variables can be always varied according to the scope of work, equipment availability, ease, and time constraints. Field testing and generation of database In order to create robust models using neural networks, a comprehensive and accurate database is a prerequisite. Therefore, for this study, a vast road network of 124 km was selected for testing and modelling purpose in India. The selection was primarily done on the basis of pavement condition, and observation of visual distresses such as fatigue cracking, ravelling, rutting, and lane/shoulder drop off. After the selection of pavement sections, detailed field surveys and testing were performed to collect the required data. Field tests to measure structural adequacy were conducted in accordance with the standards of Indian road congress using Dynatest model 8000 FWD and load plate of diameter 300 mm (IRC 115, 2014). The geophone configuration is decided as per the need at the location and standards, which is taken to be 0, 200, 300, 600, 900, and 1200 mm in this study (IRC 115, 2014). Three drops of mass were taken at each testing point with loading time for each drop generally in the range of 0.015−0.050 s, and the first drop being the seating load, was not recorded. The deflection data has been normalised as per the standard load, and suitable corrections for temperature have been applied. FWD testing was carried out at every 100 m intervals approximately. At a few locations where pavement condition was poor, the testing interval was reduced to incorporate greater number of testing points to gain a better understanding of the pavement structure. This resulted in a total of 1452 test records. Further details of the FWD and testing procedure can be found elsewhere in the literature (ASTM D4694, 2015; ASTM D4695, 2015; IRC 115, 2014). Figure 1 shows a typical FWD deflection basin obtained from data recorded at a test location. The position of load drop, radial geophone offsets, and deflections (D0 to D5 ) measured at the corresponding positions of sensor locations are also shown along with the expressions for estimation of SCI and BCI. In-situ asphalt surface temperature and air temperature were recorded at the time of FWD testing. IRI is a standardised roughness measurement of the longitudinal profile of a travelled wheel path, and ROAD MATERIALS AND PAVEMENT DESIGN 2753 Figure 1. A typical FWD deflection basin and geophone spacing used in this study. Table 2. A sample of laboratory testing results on subgrade soil. Grain size analysis Test pit number 1 2 3 4 5 Atterberg limits 4.75 mm IS Sieve 425 mic IS Sieve 75 mic IS Sieve LL 92 100 93 93 100 84 93 89 88 94 78 88 84 69 71 26 30 25 33 24 Heavy compaction test PI Soil class Field moisture content (%) Field dry density (g/cm3 ) MDD (g/cm3 ) OMC (%) CBR (%) 20 14 6 9 6 CL CL ML-CL ML ML-CL 8.98 8.53 19.11 1.54 10.57 1.70 1.70 1.83 1.85 1.84 1.95 1.98 1.97 1.88 1.99 11.00 9.70 10.00 10.50 10.50 29.2 14.6 46.7 21.5 46.7 it is commonly measured in the unit m/km (Papagiannakis & Masad, 2017). The data was collected using a bump integrator. A high value of IRI indicates increased roughness level and vice-versa. Subgrade soil parameters, including CBR and MDD, were determined through the laboratory tests on soil samples collected from test pits. CBR test is a penetration test which intends to determine the strength of subgrade soil, as compared to standard crushed rock (AASHTO T 193, 1993). High CBR value indicates a high strength of the soil. Soaked CBR values at 56 blows are taken in this study. MDD is the value of dry density corresponding to optimum moisture content. Table 2 summarises a sample of laboratory testing results conducted on the subgrade soil. Coring operations along with test pits and field surveys were performed to collect the facts about the type and thickness of layers, crack propagation and delamination (if any), characterisation of materials, and subsurface drainage conditions. Measurement of deflections, IRI, and distresses was performed at the same location to maintain uniformity and reliability in the results. The points at which data was missing, linear interpolation was adopted. It is worth to mention here that the detailed explanation of these soil properties is beyond the scope of this paper. The analysis in this study is focused on asphalt pavements. To simplify the research, the dataset does not include the particulars of maintenance or rehabilitation activities. In addition to this, due to the limited accessibility to the previous records, time constraint, and scope of work; pavement construction history data, and estimation of traffic loading could not be included in the work, which can be taken in future studies. Nevertheless, with the available resources itself, significant information was collected, and a substantial amount of dataset for modelling purposes could be generated. 2754 V. VYAS ET AL. ANN prediction model development ANN models work on the principle of the biological neural network of the human brain and analogous to its thought process, which has the capability to learn and compensate for errors (Karayiannis & Venetsanopoulos, 1993). The central processing units of ANN networks are called neurons which have weighted connections between them to receive input data, process and transfer the data as output to other neurons. They can learn input-output mapping and provide an easy approach to estimate solutions of complex and non-linear problems without any need for preliminary conjectures. Improved performance of these models could be attained by defining more levels of input processing based on trial-and-error methods, and repeatedly training the networks. Further, accurate results can be obtained by comparing outputs from different training algorithms. However, generating a realistic ANN network requires empirical experiences; its effectiveness is entirely based on the trial-and-error process, and repeatability of results is not assured (Zain et al., 2010). ANN follows the black-box approach and therefore, the nature of the prediction equation is not known (Sollazzo et al., 2017). In this study, the ANN modelling is performed to obtain the desired outputs of deflection basin parameters by taking eight input parameters. Despite the fact that the development of these models is trial-and-error based, it is still essential to carefully select the critical governing parameters according to the nature of the problem. The basis of the selection of various model parameters is presented in the subsequent sub-sections. Selection of ANN model parameters Network A set of layers and nodes form the major components of an ANN network structure. Commonly, a multilayer feed-forward neural network is used. The network consists of an input layer, one or more hidden layers which act as a boundary layer between the input and output layers and contains computational nodes called neurons, activation functions, bias, and output layer. The type of network structure adopted in this study is exemplified in Figure 2. It has 8 neurons in the input layer corresponding to 8 decision variables (X): La , Lb , Lt , Ts , Ta , CBR, MDD, and IRI; used in this study, m, n, and p represents neurons in the first, second, and ith hidden layer, respectively, and finally one neuron in the output layer corresponding to SCI or BCI, as per the case under consideration. Assuming the multilayer feed-forward network, its structure could be defined as 8-m-n-p-1 structure. Figure 2 also depicts the processing inside a neuron, wherein the net input along with their respective weights (W) is summed with respective biases, and the selected transfer function is applied over it (logsig in the present study). The arrows show the forward flow of information and back-propagation of errors during the training phase. The back-propagation mechanism propagates the errors in the reverse direction, updates biases and weights, and minimises error after every iteration (Karayiannis & Venetsanopoulos, 1993). Literature shows that researchers have applied various structures for the ANN model to obtain the best prediction performance (Amin & Amador-Jiménez, 2017; Shafabakhsh et al., 2015). The process of selection of the best network structure is usually done by varying the two important parameters, namely the number of hidden layers and number of neurons in the hidden layer(s), but it is subjected to the complexity of various other parameters including computation memory and time. Authors of similar previous studies varied the number of nodes of the hidden layer, such as 5, 10, and 25, based on trial-and-error (Fakhri & Dezfoulian, 2019; Sollazzo et al., 2017). As far as this study is concerned, different network structures are developed by varying the two parameters mentioned above and their results are compared to obtain the optimum structure. The best network structure is then recommended for such similar studies concerned with the computation of structural parameters of asphalt pavements. Following the recommendation regarding the number of nodes in hidden layer to be i/2, 1(i), 2(i), and (2i + 1), where i is the number of input nodes, different structures are tried with number of nodes as 8/2 = 4, 1(8) = 8, 2(8) = 16 and (2*8 + 1) = 17 (Zhang et al., 1998). For the sake of ROAD MATERIALS AND PAVEMENT DESIGN 2755 Figure 2. Illustration of ANN structure and its neuron. avoiding complexity in the architectures, the hidden layers are kept up to a maximum number of two. As depicted in Figure 3 (a-d) and Figure 4 (a-d), the different ANN architectures tried with one and two hidden layers are 8-4-1, 8-8-1, 8-16-1, 8-17-1, 8-4-4-1, 8-8-8-1, 8-16-16-1 and 8-17-17-1. Training, validation and testing dataset Since ANN learns and adapts from the input data, a more accurate model will result from more number of training data points. This seems to be a feasible solution for a synthetic database where the dataset is generated from any simulation framework. However, the data used in the present study is taken from the actual pavement testing, which is subjected to cost and time constraints. Recent studies have helped to ascertain the division of input data (Fakhri & Dezfoulian, 2019; MATLAB & Simulink, 2020; Sollazzo et al., 2017). Accordingly, the input data is divided into three sets by considering a typical ratio of training (70%), validation (15%), and testing (15%) for 124 km of pavement with total 1452 data points. Furthermore, it is advisable to perform normalisation of the data before the training and testing process to bring the variables in the standard range of 0–1 or −1 to 1 in order to avoid computational problems. Therefore, in the initial step, all the raw data has been normalised, using Equation (1) (Sanjay & Jyothi, 2006): xi = 0.8 ∗ (xi − xmin ) + 0.1 (xmax − xmin ) (1) where xmax and xmin are the maximum and minimum values of the data, respectively and xi is the ith data point of the dataset. 2756 V. VYAS ET AL. Figure 3. ANN architectures with one hidden layer for (a) 8-4-1; (b) 8-8-1; (c) 8-16-1; and (d) 8-17-1 networks. Network algorithm and its associated functions Many different network algorithms for ANN models are available, such as Radial Basis, Perceptron, Cascade-forward BP, Feed-forward time-delay, Feed-forward distributed time-delay, and selforganising map (Demuth & Beale, 2004). Feed-forward back-propagation (BP) algorithm is widely used for its application in problems of pavement engineering (Elbagalati et al., 2018; Li & Wang, 2018; Sollazzo et al., 2017). For the feed-forward BP algorithm, the widely-adopted transfer functions are log-sigmoid transfer function (logsig), hyperbolic tangent sigmoid transfer function (tansig), and linear transfer function (purelin). Non-linear relationships between input and output variables would be better addressed by using non-linear transfer function such as sigmoid function. Therefore, the logsig transfer function is adopted in this study, as given by Equation (2): z= 1 1 + e−y (2) ROAD MATERIALS AND PAVEMENT DESIGN 2757 Figure 4. ANN architectures with two hidden layers for (a) 8-4-4-1; (b) 8-8-8-1; (c) 8-16-16-1; and (d) 8-17-17-1 networks. where z is the output from the hidden layer neuron after sigmoid function, and y is the net input to the hidden layer neuron. Eventually, the BP algorithm reduces the error and finds its lowest possible value, which is represented by performance function. This includes Mean Square Error (MSE), Sum Square Error (SSE), Mean Absolute Error (MAE), Root Mean Squared Error (RMSE), and Mean Absolute Percentage Error (MAPE). Previous studies have mostly applied MSE performance function, and the same has been considered in this study. MSE of n data points is given by Equation (3): 1 (Oi − Pi )2 n n MSE = i=1 where Oi and Pi are the observed and predicted values of any data point, respectively. (3) 2758 V. VYAS ET AL. In order to reduce the error, as the number of iterations proceeds, the weights and biases are continuously updated in which optimum values of learning rate, and momentum provides better accuracy as well as faster convergence. The default values of these parameters is adopted. Training function and learning function also govern the reduction in error. Training functions are based on gradient descent algorithm (traingd, traingda, traingdx), Bayesian regularisation (trainbr) or Levenberg–Marquardt BP (trainlm), and learning functions such as learngd (gradient descent weight/bias learning function), learngdm (gradient descent with momentum weight/bias learning function), etc. are used. In this work, trainlm and learngd are used as training and learning functions, respectively. Figure 5 presents the step-wise methodology adopted in this study and its explanation is covered in the preceding paragraphs. Results In order to illustrate the efficacy of ANN models in predicting the structural parameters of asphalt pavements, eight different models each for the two output variables are trained, resulting in a total of sixteen models. The proposed structures differ in the number of hidden layers and neurons in these layers, with the input and output layer fixed with eight and one nodes, respectively corresponding to eight input and one output variable. The entire analysis is performed in MATLAB software, version R2017a (Demuth & Beale, 2004). The data for modelling is collected through field testing. The regression charts for training, validation, and testing phases along with error histograms for selected ANN models are presented in Figures 6 and 7 for SCI and BCI, respectively. Similar plots are obtained for the remaining cases. The error histograms plotted for each ANN architecture reveal that their average is very close to zero, and in almost all the cases, 80% of the errors or more are confined within one or two central bins. The performance of these models is summarised in Table 3. Discussion The feed-forward BP-ANN approach in this study has satisfactorily demonstrated the correlation of input and output variables with varying coefficients of determination. It should be noted that the data set used for modelling purposes has not been taken from any synthetic database, rather it has been obtained experimentally by conducting extensive field testing which might have few manual or instrumental errors associated during testing. Therefore, the R2 values obtained in 0.7–0.8 range can be considered to be indicative of good correlation between the variables. Although it is concluded that the correlation fits well, the R2 values may be further improved by modifying the non-linearity aspects such as changing the transfer function or number of hidden layers and could be considered in future scope of the study. The intelligent approach of neural networks has been concluded to be felicitous for the complex problems of pavement response modelling, wherein numerous factors play prominent roles. The development of similar robust models would assist the highway agencies in easing the decision-making exercises of pavement maintenance and rehabilitation treatments in a short span of time. In this research work, the possibility of appraising DBP, such as SCI and BCI, is exhibited using pavement’s structural, functional, climatic, and subgrade strength attributes. The modelling has been performed from the results of actual field testing with 1452 data points covering 124 km of the asphalt pavement network, rather than from generation of any synthetic database. The large dataset and field testing outcomes assure the robustness of these models, and their implementation presents practical field implications. In a general sense, for a model with reasonable accuracy, the coefficient of determination (R2 ) value, which is a measure of the correlation between outputs and targets, is high (close to one), and MSE which is the average squared difference between outputs and targets, is low (close to zero). However, the acceptable values would differ from case to case and depend on the data availability and problem category. The R2 value of ANN models in this study is obtained to be as good as 0.875, with the average value for all the three samples (training, validation, and test) being 0.784, ROAD MATERIALS AND PAVEMENT DESIGN 2759 Figure 5. Flow chart showing ANN model development in the study. 0.810, and 0.768 for SCI; and 0.762, 0.674, and 0.717 for BCI (refer Table 3). The satisfactory R2 value in all the sixteen models proves that the correlation developed in this work is significant, which can be further attested by observing the low values of MSE, presented in Table 3. The error distribution plots help to visualise the possible trends and also confirm the results, with an average value close to zero. Another notable finding which compliments the outcomes from previous studies is that as compared to other pavement layers, properties of asphalt layer have a more profound influence on the condition 2760 V. VYAS ET AL. Figure 6. Regression results and error histograms for SCI using (a) 8-4-1; and (b) 8-4-4-1 networks. of pavement (Schwartz et al., 2011). The finding is clearly evident from R2 values of SCI, which are higher than the R2 values of BCI. It is worth to note that for the accuracy and acceptability of the model, low values of MSE is not imperative since it is affected by the type of data, degrees of freedom, residual space, and regression. Meticulous investigation of regression, MSE, and error plots should be made before drawing any conclusion regarding the choice of the best network. Theoretically, as number of neurons increases, the ANN model achieves better precision and prediction proficiency, but on the contrary increases complexity and computation time. Nevertheless, with a view to select the best and optimum network architecture from the sixteen structures containing a different number of computational neurons, apart from R2 and MSE values, the simplicity and computational ease are also taken into consideration. In accordance with the selection of the best network architecture, as seen from Table 3 and Figure 8, the R2 values obtained for the network structure 8-8-1 and 8-16-1, i.e. for neurons equal to the number ROAD MATERIALS AND PAVEMENT DESIGN 2761 Figure 7. Regression results and error histograms for BCI using (a) 8-4-1; and (b) 8-4-4-1 networks. of input variables and twice of the number of input variables, are superior as compared to the R2 values obtained for all other network architectures. On further increasing the number of neurons or number of hidden layers, there is no significant improvement in the performance of the models. For one layer models with SCI as an output parameter, increasing the number of neurons from 4 to 8, increases R2 value by 10.76%, whereas on further increment of neurons there is no significant change in R2 value, and it eventually decreases. With BCI as an output parameter in one layer models, R2 value increases by about 4% on increasing the neurons from 4 to 8, and 8 to 16 but decreases by additional neurons. The general trend of MSE values in both the cases is such that it is maximum for 4-neuron models and reduces (approximately by 37% for SCI and 45% for BCI) with the increase of neurons number to eight. Additionally, it is evident from the R2 values of one layer models and two-layer models that the overall performance of the two-layer models is less than the one layer models. One of the important 2762 V. VYAS ET AL. Table 3. Performance results of different ANN models. Input variables Neurons Output variables MSE Stag R2 8-4-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 4 SCI 0.086 Training Validation Test Total 0.719 0.771 0.786 0.734 8-8-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 8 SCI 0.054 Training Validation Test Total 0.794 0.840 0.875 0.813 8-16-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 16 SCI 0.014 Training Validation Test Total 0.789 0.862 0.874 0.812 8-17-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 17 SCI 0.0128 Training Validation Test Total 0.779 0.846 0.853 0.798 8-4-4-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 4 SCI 0.096 Training Validation Test Total 0.789 0.840 0.567 0.755 8-8-8-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 8 SCI 0.0513 Training Validation Test Total 0.817 0.706 0.571 0.754 8-16-16-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 16 SCI 0.113 Training Validation Test Total 0.773 0.868 0.849 0.794 8-17-17-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 17 SCI 0.078 Training Validation Test Total 0.815 0.747 0.765 0.795 8-4-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 4 BCI 0.279 Training Validation Test Total 0.702 0.705 0.775 0.712 8-8-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 8 BCI 0.151 Training Validation Test Total 0.781 0.642 0.778 0.746 8-16-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 16 BCI 0.178 Training Validation Test Total 0.802 0.652 0.800 0.777 8-17-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 17 BCI 0.0208 Training Validation Test Total 0.793 0.662 0.681 0.762 8-4-4-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 4 BCI 0.148 Training Validation Test Total 0.738 0.512 0.668 0.692 8-8-8-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 8 BCI 0.226 Training Validation Test Total 0.752 0.775 0.727 0.753 Network (continued). ROAD MATERIALS AND PAVEMENT DESIGN 2763 Table 3. Continued. Network Input variables Neurons Output variables MSE Stag R2 8-16-16-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 16 BCI 0.029 Training Validation Test Total 0.734 0.737 0.720 0.730 8-17-17-1 La, Lb. Lt, Tp, Ta, CBR, MDD, IRI 17 BCI 0.254 Training Validation Test Total 0.797 0.710 0.586 0.751 Figure 8. Variation in regression and mean square error results for different ANN architectures for (a) SCI; and (b) BCI. Table 4. Comparison of results from artificial neural networks and multiple linear regression approaches. Model type Artificial neural network (8-8-1 structure) Input variables Output variable R2 MSE La, Lb, Lt, Ts, Ta, CBR, MDD, IRI SCI BCI 0.813 0.746 0.054 0.151 Multiple linear regression La, Lb, Lt, Ts, Ta, CBR, MDD, IRI SCI BCI 0.475 0.417 0.032 0.055 observation is that even for two-layer models, better performance (in terms of R2 and MSE values) is obtained for the 8-8-8-1, and 8-16-16-1 structures, i.e. for neurons equal to the number of input variables and twice of the number of input variables but the two layers make the system much more intricate. However, since the results from both the structures are comparable and considering the need to maintain the simplicity of the models by keeping fewer neurons and hidden layers, the network configuration 8-8-1 can be selected as the best structure. In order to further validate the suitability of ANN for such complex non-linear problems, the ANN results have been compared with multiple linear regression approach, with the same number of input records. Table 4 compares the results of multiple linear regression models for SCI and BCI, respectively, with that of the ANN 8-8-1 model. The R2 from these models for the same number of records and input variables are 41.60% and 44.10% lower for SCI and BCI, respectively than those obtained from ANN. However, the p-values are almost equal to zero and less than the significance level of 0.05, therefore, a significant linear regression relationship exists between the variables. This provides the evidence to the higher applicability of ANN models for dealing with such non-linear behaviours. The highway agencies may work on a similar fashion by training their own ANN structures using the readily available or measurable data to obtain an accurate prediction of structural adequacy without entirely depending on the deflection tests. However, the results are highly dependent on the number, quality, and characteristics of the input variables. Therefore, the selection of these parameters should be made scrupulously by understanding their connections/relationships. 2764 V. VYAS ET AL. Conclusions In this paper, the propriety of using ANN models for numerical predictions of structural performance parameters in asphalt pavements and their assistance in providing vital conclusions to optimise PMS are justified. The structural and functional performance parameters of asphalt pavements along with environmental and subgrade soil characteristics, have been correlated to the results of FWD deflection basin derived parameters, namely SCI and BCI. Adopting a large dataset of 1452 records obtained from field testing, authors have trained sixteen different ANN structures as 8-4-1, 8-8-1, 8-16-1, 8-17-1, 8-4-4-1, 8-8-8-1, 8-16-16-1, and 8-17-17-1, for each of the two output parameters separately to gain better insights of modelling. The models show an accuracy with R2 values up to 0.875 and 0.868 in testing, and validation phases, respectively. The best network structure based on the R2 , MSE, and simplicity of the network for such studies is proposed to be 8-8-1. On a further note, the superior R2 values of SCI as compared to BCI rationalises the fact that properties of the asphalt layer predominantly impact the entire pavement condition. The ANN outcomes are also compared to the classical multiple linear regression approach, and the results authenticate the superior performance of ANN models as compared to multiple linear regression models for non-linear problems of pavement analysis and design. The preliminary approach presented in the study provides reliable correlations among the attributes. The ease of approach for data analysis minimises the need to go through the cumbersome process of back-calculation. The developed models would help to estimate the values of SCI and BCI of the pavement, which are direct indicators of its structural condition, along with the clear understanding of pavement layers contributing to the current condition (refer Table 1). Therefore, by directly knowing the structural health of pavements, need of conducting FWD surveys frequently to obtain information about structural condition of pavement would reduce. At the same time, it would promote the use of employing structural condition while making M&R decisions, due to the ease of obtaining the information. Hence, the current practice of typically selecting pavement sections for M&R based only on their functional condition assessment would improve, and detailed knowledge of structural adequacy of individual pavement layer would assist in optimising the M&R strategies. However, it does not intend to avoid conducting the deflection testing since the direct assessment of structural capacity would indeed increase the model accuracy. Accordingly, future studies can seek to incorporate other significant input parameters such as traffic-related (like annual average daily traffic, equivalent single axle load, etc.), additional climatic factors (like annual average daily temperature), rainfall data, and other functional performance indicators such as pavement condition index, and present serviceability index. Consequently, the authors believe that this study can form a basis for future studies by incorporation of additional parameters listed above, particularly at network levels where deflection data acquisition and processing frequently is a challenge but the approach and methodology adopted could be similar. It is worth mentioning here that the trained ANN models should be adopted for similar cases only, otherwise the accuracy and quality of prediction could be affected significantly. Disclosure statement No potential conflict of interest was reported by the authors. ORCID Ajit Pratap Singh http://orcid.org/0000-0001-5103-0486 References AASHTO. (1993). Guide for design of pavement structures. American Association of State Highway and Transportation Officials (US). AASHTO T 193. (1993). Standard method of test for the California bearing ratio: Standard specifications for transportation materials and methods of sampling and testing. American Association of State Highway and Transportation Officials. ROAD MATERIALS AND PAVEMENT DESIGN 2765 Alavi, A. H., & Buttlar, W. G. (2018). 1 Smartphone technology integrated with machine learning for airport pavement condition assessment. In A. H. Alavi & W. G. Buttlar (Eds.), Data analytics for smart cities (pp. 1–22). Auerbach Publications. Amin, S. R., & Amador-Jiménez, L. E. (2017). Backpropagation Neural Network to estimate pavement performance: Dealing with measurement errors. Road Materials and Pavement Design, 18(5), 1218–1238. https://doi.org/10.1080/14680629. 2016.1202129 ARA. (2004). Guide for mechanistic-empirical design of new and rehabilitated pavement structures (Report No. NCHRP 1-37A). Transportation Research Board (US). ASTM D4694. (2015). Standard test method for deflections with a falling-weight-type impulse load device. ASTM International. www.astm.org ASTM D4695. (2015). Standard guide for general pavement deflection measurements. ASTM International. www.astm.org Bianchini, A. (2014). Thin asphalt pavement performance equation through direct computation of falling weight deflectometer-derived strains. International Journal of Pavement Engineering, 15(9), 831–839. https://doi.org/10.1080/ 10298436.2014.893319 Bilodeau, J. P., & Doré, G. (2012). Estimation of tensile strains at the bottom of asphalt concrete layers under wheel loading using deflection basins from falling weight deflectometer tests. Canadian Journal of Civil Engineering, 39(7), 771–778. https://doi.org/10.1139/l2012-063 Chang, C., Saenz, D., Nazarian, S., Abdallah, I. N., Wimsatt, A., Freeman, T., & Fernando, E. G. (2014). TXDOT guidelines to assign PMIS treatment levels (Report No. FHWA/TX-14/0-6673-P1). Department of Transportation (US). Demuth, H., & Beale, M. (2004). Neural network toolbox, for use with MATLAB, user’s guide. The MathWorks Inc. Elbagalati, O., Mousa, M., Elseifi, M. A., Gaspard, K., & Zhang, Z. (2018). Development of a methodology to backcalculate pavement layer moduli using the traffic speed deflectometer. Canadian Journal of Civil Engineering, 45(5), 377–385. https://doi.org/10.1139/cjce-2017-0570 Fakhri, M., & Dezfoulian, R. S. (2019). Pavement structural evaluation based on roughness and surface distress survey using neural network model. Construction and Building Materials, 204, 768–780. https://doi.org/10.1016/j.conbuildmat.2019. 01.142 Gedafa, D. S., Hossain, M., Miller, R., & Van, T. (2012). Relationship between flexible pavement cracking and surface deflections (No. 12-1350). 91st Annual Meeting Compendium of Papers DVD, Transportation Research Board (US). Gopalakrishnan, K., Kim, S., Ceylan, H., & Kaya, O. (2014). Development of asphalt dynamic modulus master curve using falling weight deflectometer measurements (Report No. IHRB Project TR-659). Iowa State University (US). Gopalakrishnan, K., & Thompson, M. R. (2005, January). Use of deflection basin parameters to characterize structural degradation of airport flexible pavements. In Proceedings of Geo-Frontiers Congress (pp. 1–15). Horak, E. (1987). Aspects of deflection basin parameters used in a mechanistic rehabilitation design procedure for flexible pavements in South Africa [Unpublished doctoral dissertation]. https://repository.up.ac.za/handle/2263/23960 Horak, E. (2008). Benchmarking the structural condition of flexible pavements with deflection bowl parameters. Journal of the South African Institution of Civil Engineering, 50(2), 2–9. Horak, E., Emery, S., & Maina, J. (2015, August). Review of falling weight deflectometer deflection benchmark analysis on roads and airfields. In Proceedings of the 11th conference on asphalt pavements for Southern Africa, Sun City, South Africa. IRC 115. (2014). Guidelines for structural evaluation and strengthening of flexible road pavements using Falling Weight Deflectometer (FWD) Technique. Indian Road Congress. Karayiannis, N. B., & Venetsanopoulos, A. N. (1993). Artificial neural networks: Learning algorithms, performance evaluation, and applications (Vol. 209). Springer Science & Business Media. Kim, Y. R. (2000). Assessing pavement layer condition using deflection data (Report No. 10-48). National Research Council, Transportation Research Board (US). Kumlai, A., Sangpetngam, B., & Chalempong, S. (2014). Development of equations for determining layer elastic moduli using pavement deflection characteristics. In 93rd annual meeting of transportation research board, Washington, DC (US). Li, M., & Wang, H. (2018). Prediction of asphalt pavement responses from FWD surface deflections using soft computing methods. Journal of Transportation Engineering, American Society of Civil Engineers, 142(2), 04018014. https://doi.org/10.1061/JPEODX.0000044 Li, M., & Wang, H. (2019). Development of ANN-GA program for backcalculation of pavement moduli under FWD testing with viscoelastic and nonlinear parameters. International Journal of Pavement Engineering, 20(4), 490–498. https://doi.org/10.1080/10298436.2017.1309197 Losa, M., Bacci, R., & Leandri, P. (2008). A statistical model for prediction of critical strains in pavements from deflection measurements. Road Materials and Pavement Design, 9(sup1), 373–396. https://doi.org/10.1080/14680629.2008.969 0175 Majidifard, H., Jahangiri, B., Buttlar, W. G., & Alavi, A. H. (2019). New machine learning-based prediction models for fracture energy of asphalt mixtures. Measurement, 135, 438–451. https://doi.org/10.1016/j.measurement.2018.11.081 MATLAB & Simulink. (2020). Divide data for optimal neural network training. Retrieved May 15, 2020, from https://in.mathworks.com/help/deeplearning/ug/divide-data-for-optimal-neural-network-training.html 2766 V. VYAS ET AL. Meier, R. W. (1995). Backcalculation of flexible pavement moduli from falling weight deflectometer data using artificial neural networks (Report No. WES/TR/GL-95-3). U.S. Army Corps of Engineers (US). Papagiannakis, A. T., & Masad, E. A. (2017). Pavement design and materials. John Wiley & Sons. Park, H. M., Kim, Y. R., & Wan Park, S. (2005). Assessment of pavement layer condition with use of multiload-level falling weight deflectometer deflections. Transportation Research Record: Journal of the Transportation Research Board, 1905(1), 107–116. https://doi.org/10.1177/0361198105190500112 Pekcan, O., Tutumluer, E., & Thompson, M. R. (2008, October). Artificial neural network based backcalculation of conventional flexible pavements on lime stabilized soils. In Proceedings of the 12th international association for computer methods and advances in geomechanics (pp. 1–6). Curran. Peterson, G., & Shepard, L. W. (1972). Deflection analysis of flexible pavements, materials and test division report. Utah State Department of Transportation (US). Plati, C., Georgiou, P., & Papavasiliou, V. (2016). Simulating pavement structural condition using artificial neural networks. Structure and Infrastructure Engineering, 12(9), 1127–1136. https://doi.org/10.1080/15732479.2015.1086384 Rabbi, M. F., & Mishra, D. (2019). Using FWD deflection basin parameters for network-level assessment of flexible pavements. International Journal of Pavement Engineering, 1–15. https://doi.org/10.1080/10298436.2019.1580366 Saleh, M. (2016). Simplified approach for structural capacity evaluation of flexible pavements at the network level. International Journal of Pavement Engineering, 17(5), 440–448. https://doi.org/10.1080/10298436.2014.993202 Sanjay, C., & Jyothi, C. (2006). A study of surface roughness in drilling using mathematical analysis and neural networks. International Journal of Advanced Manufacturing Technology, 29(9-10), 846–852. https://doi.org/10.1007/s00170-0052538-8 Schwartz, C. W., Li, R., Kim, S. H., Ceylan, H., & Gopalakrishnan, K. (2011). Sensitivity evaluation of MEPDG performance prediction (Project No. 01–47). NCHRP, Transportation Research Board of the National Academies (US). Shafabakhsh, G., Talebsafa, M., Motamedi, M., & Badroodi, S. K. (2015). Analytical evaluation of load movement on flexible pavement and selection of optimum neural network algorithm. KSCE Journal of Civil Engineering, 19(6), 1738–1746. https://doi.org/10.1007/s12205-014-0585-0 Singh, A. P., Sharma, A., Mishra, R., Wagle, M., & Sarkar, A. K. (2018). Pavement condition assessment using soft computingtechniques. International Journal of Pavement Research and Technology, 11(6), 564–581. https://doi.org/10.1016/ j.ijprt.2017.12.006 Sollazzo, G., Fwa, T. F., & Bosurgi, G. (2017). An ANN model to correlate roughness and structural performance in asphalt pavements. Construction and Building Materials, 134, 684–693. https://doi.org/10.1016/j.conbuildmat.2016.12.186 Tutumluer, E., Pekcan, O., & Ghaboussi, J. (2009). Nondestructive pavement evaluation using finite element analysis based soft computing models (Report No. 010IY01). USDOT Region V Regional University Transportation Center (US). Varma, S., & Kutay, M. E. (2016). Backcalculation of viscoelastic and nonlinear flexible pavement layer properties from falling weight deflections. International Journal of Pavement Engineering, 17(5), 388–402. https://doi.org/10.1080/1029 8436.2014.993196 Vyas, V., Patil, V. J., Singh, A. P., & Srivastava, A. (2019). Application of infrared thermography for debonding detection in asphalt pavements. Journal of Civil Structural Health Monitoring, 9(3), 325–337. https://doi.org/10.1007/s13349-01900337-8 Vyas, V., Singh, A. P., & Srivastava, A. (2019a). A decision making framework for condition evaluation of airfield pavements using non-destructive testing. In I. L. Al-Qadi, H. Ozer, A. Loizos, & S. Murrell (Eds.), Airfield and highway pavements 2019: Innovation and sustainability in highway and airfield pavement technology (pp. 343–353). American Society of Civil Engineers. Vyas, V., Singh, A. P., & Srivastava, A. (2019b). Entropy-based fuzzy SWOT decision-making for condition assessment of airfield pavements. International Journal of Pavement Engineering, 1–12. https://doi.org/10.1080/10298436.2019.1671590 Wu, Z., Zhang, Z., & Abadie, C. (2013). Determining structural strength of existing asphalt layer using condition survey data. International Journal of Pavement Engineering, 14(7), 603–611. https://doi.org/10.1080/10298436.2012.677845 Xu, B., Ranjithan, S. R., & Kim, Y. R. (2002a). New condition assessment procedure for asphalt pavement layers, using falling weight deflectometer deflections. Transportation Research Record: Journal of the Transportation Research Board, 1806(1), 57–69. https://doi.org/10.3141/1806-07 Xu, B., Ranjithan, S. R., & Kim, Y. R. (2002b). New relationships between falling weight deflectometer deflections and asphalt pavement layer condition indicators. Transportation Research Record: Journal of the Transportation Research Board, 1806(1), 48–56. https://doi.org/10.3141/1806-06 Zaabar, I., Chatti, K., Lee, H. S., & Lajnef, N. (2014). Backcalculation of asphalt concrete modulus master curve from field-measured falling weight deflectometer data: Using a new time domain viscoelastic dynamic solution and genetic algorithm. Transportation Research Record: Journal of the Transportation Research Board, 2457(1), 80–92. https://doi.org/10.3141/2457-09 Zain, A. M., Haron, H., & Sharif, S. (2010). Prediction of surface roughness in the end milling machining using artificial neural network. Expert Systems with Applications, 37(2), 1755–1768. https://doi.org/10.1016/j.eswa.2009.07.033 Zhang, G., Patuwo, B. E., & Hu, M. Y. (1998). Forecasting with artificial neural networks: The state of the art. International Journal of Forecasting, 14(1), 35–62. https://doi.org/10.1016/S0169-2070(97)00044-7