Chapter 2
Risk ordering
2.1
Position of the problem
Since insurance is used to reduce the risk, we need an objective criteria in order to compare
risk. Unfortunately, it is sometimes very difficult to compare risky situations : most of the
time, agents have a different opinion.
Even in a non-risky situation, in front of several goods, the comparison between two profile
of consumption is difficult and based on the concept of preferences (or sometimes of utility
function) that will be recalled in the next subsection.
2.1.1
Individual preferences
Let us consider the case of a discrete risky model described by Ω = {σ1 , . . . , σS }, for which
the consumption set of agent i, denoted by Xi is either1 RS+ (or RS++ which is by definition,
(]0, +∞[)S ). Note that for each event s, the consumption a(s) is a real number.
The most classical modelization of the tastes of a consumer is the concept of total order
associated to the agent. When the preferences of agent i are total, in front of two alternatives
profile of consumptions, a or b, he can either
• be indifferent between a and b (denoted by a ∼i b)
• prefer a to b (denoted by a #i b)
• prefer b to a (denoted by a ≺i b)
It is important to distinguish2 the “weak” preference relation %i from the “strict” preference
relation ≺i . Concretely, a %i b means either that a %i b and b &%i a. “The agent wants a at
least as much as b” or “the agent weakly prefers a to b”
Conversely, if the primitive data is the weak preference relation, we can build the asymmetric
part,
The choice of RS+ is the most natural “allowing any non-negative consumption” while restricting to strictly
positive consumptions avoids a lot of mathematical difficulties about the boundary of Xi since it is an open set.
2
In mathematics, the “weak” preference relation is a non-strict (or reflexive) partial order. In these contexts
while the strict relation is irreflexive.
1
9
10
CHAPTER 2. RISK ORDERING
• a ≺i b ⇔ a %i b and b &%i a.
• a ∼i b ⇔ a (i b and a %i b.
2.1.2
Utility function
Since preferences are a mathematical theoretical concept, it is most of the times replaced by a
numerical criteria.
We say the a numerical function from Xi to R is a utility function that represents the
preferences %i of the agent i if a %i b ⇔ u(a) ≤ u(b).
It is important to understand that the utility function is not unique
Proposition 2.1 If u represents the preferences %i then for any ϕ increasing function from R
to R, v defined by v = ϕ ◦ u also represents the preferences %i .
!
2
For example, if X = R++
, u(x) = 3 x21 x2 and v(x) = 2 ln(x1 ) + ln(x2 ) are associated to the
same preferences.
A classical example of utility function in a stochastic context is the class of Von-Neumann
Morgenstern utility function, where the agent is in front of a risky situation where the probability of state σk is pk . In this case, there exists some function ui such that
Ui (X) = Ui (X(σ1 ), . . . , X(σS )) = p1 u(X(σ1 )) + . . . + pS u(X(σS ))
If X is not stochastic “X = (α, . . . , α)”, then Ui (X) = u(α). Von-Neumann Morgenstern utility
function are expected utility function. Risk-aversion, risk-neutral, and risk-loving behaviour
are related to the concavity property of u.
2.1.3
dominance
Let us start by an example,
event
σ1 σ2
probability 1/2 1/2
a
1
41
b
14 15
As told previously, it is reasonable to consider that every agent will have an opinion about
“Is a better then b?”, but this opinion is “agent-dependent”. Therefore, if we want a notion of
stochastic dominance, it will be a partial order between random variables.
There are several notions of stochastic ordering, indeed one has to make an arbitrage between
being able to compare a lot of situations, and being “accepted” by a lot of people.
2.2
2.2.1
Several introductory notions of stochastic dominance
State-wise stochastic dominance
The simplest case of stochastic dominance is state-wise dominance (also known as state-by-state
dominance), defined as follows:
2.2. SEVERAL INTRODUCTORY NOTIONS OF STOCHASTIC DOMINANCE
11
Random variable a is state-wise stochastic dominant over random variable b gives at least
as good a result in every state (every possible set of outcomes), and a strictly better result
in at least one state. For example, if a dollar is added to one or more prizes in a lottery, the
new lottery state-wise dominates the old one because it yields a better payout regardless of the
specific numbers realized by the lottery. Similarly, if a risk insurance policy has a lower premium
and a better coverage than another policy, then with or without damage, the outcome is better.
Anyone who prefers more to less (in the standard terminology, anyone who has monotonically
increasing preferences) will always prefer a state-wise dominant gamble.
This notion will be “accepted” by everybody but as a counterpart, it is unable to compare
the situation studied in subsection 2.1.3: neither a (SSD b nor a %SSD b. Even worst, it is also
unable to order a and c.
event
σ1 σ2
probability 1/2 1/2
a
1
41
c
52
2
Also note, that two random variables following the same law are not similar with respect to
SSD ordering.
2.2.2
First stochastic dominance
In order to encompass the last example, we can introduce the first dominance defined as follows:
a (F SD b if and only if for any t, Fa (t) ≤ Fb (t). Here clearly, c #F SD a.
Since it involves the cumulative distribution function, two random variables following the
same law are similar with respect to FSD ordering. Unfortunately, we can not conclude for the
next exemple
event
σ1 σ2
probability 1/2 1/2
a
0
30
b
15 15
More generally, it is easy to show that a %F SD b implies that E(a) < E(b), so it is unable to
compare two lotteries sharing the same expectation.
2.2.3
Mean-variance dominance
Let X and Y be two random variables, and let us assume that E(X) = E(Y ), and consider
them to be claim to be paid by insurance companies to its clients. We may consider that
X dominates Y if V (X) ≤ V (Y ). This notion is inadequate in this context since it may
underestimate potential risk. Let us consider an insurance company owning R = 50 as reserve
funds in front of the alternative.
event
σ1
σ2
σ3
probability 0.5 0.499 0.001
X
20
0
0
Y
9.9 9.9 109.9
12
CHAPTER 2. RISK ORDERING
Clearly, Y is less risky than X with respect to mean-variance (and they have the same expectation), but in real life, it is a much more dangerous situation since with positive probability,
the insurance company may go to bankruptcy. This is why it is necessary for an actuary to
pay attention to extreme values (even if they are with small probabilities and “hidden” by the
criteria of variance) in order to estimate the dangerousness.
2.3
2.3.1
SMPS dominance
definition
Definition 2.2 Risk Y is said to have thicker tails than risk X (or to be riskier than X with
respect to the Simple Mean Preserving Spread property) if
• E(X) = E(Y )
• there exists some t0 in R such that
"
P (X ≤ t) ≤ P (Y ≤ t) if t < t0
P (X > t) ≤ P (Y > t) if t ≥ t0
We will write that X (SM P S Y , X is less risky than Y for the SMPS criterium (Y has been
obtained by a Simple Mean Preserving Spread3 ).
This presentation is centered on the notion of tails but
" most of the time, we will write the
FX (t) ≤ FY (t) if t < t0
definition in terms of cumulative distribution functions:
FX (t) ≥ FY (t) if t ≥ t0
Proposition 2.3 Let X and Y be two random variables, and let us assume that E(X) = E(Y ),
X (SM P S Y if and only if
"
FX (t) ≤ FY (t) if t < t0
FX (t) ≥ FY (t) if t > t0
Proof 2.4 It suffices to use the right continuity at point t0 .
Once again, it involves only the cumulative distribution function, two random variables
following the same law are similar with respect to SMPS ordering and it is the only case of
similarity: X #SM P S Y , X is strictly less risky than Y for the SMPS criterium if X (SM P S Y ,
and FX &= FY .
2.3.2
Discrete examples
Let us first study a simple example,
event
σ1 σ2
probability 1/2 1/2
X
1
1
Y
0
2
3
This notion is not introduced here even if the vocabulary will be used.
13
2.3. SMPS DOMINANCE
FY
1
FX
0
0
1
2
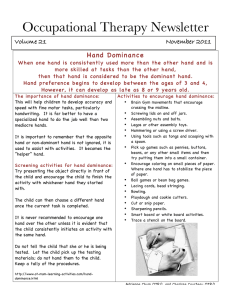
Figure 2.1: A first SMPS comparison
For t0 = 1, we can check that X #SM P S Y (cf. Figure 2.1).
FX (t) =
"
if t < 0
0
1/2 if t ∈ [0, 2[
FY (t) =
1
if t ≥ 2
0 if t < 1
1 if t ≥ 1
The preference for a sure quantity is a very general result as shown by the following exercise.
Exercise 2.5 Let Y be a non constant random variable and X be constant, equal to E(Y ).
Show that X #SM P S Y .
Here there was a unique possible value for t0 but the next example will show that it may
be non unique.
event
σ1 σ2 σ3
probability 1/3 1/3 1/3
X
1
2
3
Z
0
2
4
0
1/3
FX (t) =
2/3
1
if
if
if
if
0
1/3
FY (t) =
2/3
1
t<1
t ∈ [1, 2[
t ∈ [2, 3[
t≥3
if
if
if
if
t<0
t ∈ [0, 2[
t ∈ [2, 4[
t≥4
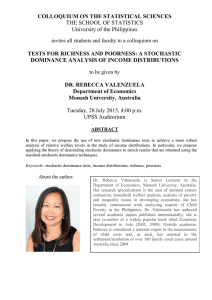
Since for any t ∈ [2, 3[, FX (t) = FY (t), any value of t0 in [2, 3] could be used (cf Figure 2.2).
1
FX
FY
0
0
1
2
t0
3
Figure 2.2: A second SMPS comparison
4
14
CHAPTER 2. RISK ORDERING
Exercise 2.6 Let us consider X and Y . Show that
SMPS.
event
σ1 σ2
probability 1/4 1/4
X
10 20
Y
9
20
X is more risky than Y with respect to
σ3 σ4
1/4 1/4
30 40
30 41
Exercise 2.7 Let us consider X and Y . Show that X #SM P S Y (transfert of probability from
center to the tails).
event
σ1! σ2! σ3! σ4!
probability .3 .2 .2 .3
Y
10 20 30 40
event
σ1 σ2 σ3 σ4
probability .2 .3 .3 .2
X
10 20 30 40
2.3.3
Density examples
In the case of density variables, most of the times, the picture is easier to analyse (Figure 2.3)
but once again, t0 may be non unique (Figure 2.4).
1
FY
FX
0
0
1
2
Figure 2.3: A typical SMPS comparison, here X (SM P S Y
1
FY
FX
0
0
1
2
Figure 2.4: A non typical SMPS comparison
2.3.4
Classical properties
Proposition 2.8 X #SM P S Y if and only if −X #SM P S −Y .
Exercise 2.9 X #SM P S Y if and only if −X #SM P S −Y .
Proposition 2.10 Let a and b be real numbers such that a &= 0, then X #SM P S Y if and only
if aX + b #SM P S aY + b.
Proposition 2.11 Let ϕ be an increasing function from R to R, then X #SM P S Y if and only
if ϕ(X) #SM P S ϕ(Y ).
15
2.3. SMPS DOMINANCE
Lemma 2.12 Let X be a real valued random variable
subset Γ of Ω with positive probability, let us defined Y
and sharing the same expectation. Formally,
"
X(ω)
Y (ω) =
E(X1Z )/P (Z)
defined on a set Ω, let us consider any
as constant on Γ, equal to X outside Γ
if ω ∈
/Γ
if ω ∈ Γ
If X is not constant on Z, then Y #SM P S X.
Proof 2.13 Let us denote t0 the value of Y on Γ. Note that X = Y on both sets Y < t0 =
{ω ∈ Ω | Y (ω) < t0 } and Y > t0 .
• Let t < t0 , we have
FY (t) = P (Y ≤ t)
= P ((Y ≤ t) ∩ ΓC )
(since Y = t0 on Γ)
= P ((X ≤ t) ∩ ΓC ) (since Y = X on ΓC )
≤ P (X ≤ t)
• Let t > t0 , we have
FY (t) = 1 − P (Y > t)
= 1 − P ((Y > t) ∩ ΓC ) (since Y = t0 on Γ)
= 1 − P ((X > t) ∩ ΓC )
≥ 1 − P (X > t)
≥ FX (t)
(since Y = X on ΓC )
Lemma 2.14 Let X and Y be a real valued random variable defined on a set Ω, such that
E(X) = E(Y ). Let us assume that there exists a real number t0 and a partition (Ω+ , Ω? , Ω− )
of Ω such that
• For all ω ∈ Ω+ , t0 < X(t) ≤ Y (t);
• For all ω ∈ Ω? , X(t) = t0 ;
• For all ω ∈ Ω− , Y (t) ≤ X(t) < t0 .
Then X %SM P S Y .
Proof 2.15 Let us distinguish the two cases:
• Let t < t0 , we have
FX (t) = P (X ≤ t)
= P ((X ≤ t) ∩ Ω− ) + P ((X ≤ t) ∩ Ω+ ) + P ((X ≤ t) ∩ Ω? )
= P ((X ≤ t) ∩ Ω− ) (since X > t on Ω? ∪ Ω+ )
= P ((Y ≤ t) ∩ Γ+ ) (since Y ≤ X on Ω− )
≤ P (Y ≤ t) = FY (t).
16
CHAPTER 2. RISK ORDERING
• Let t > t0 , we have
FX (t) = 1 − P (X > t)
= 1 − (P ((X > t) ∩ Ω− ) + P ((X > t) ∩ Ω+ ) + P ((X > t) ∩ Ω? ))
= 1 − P ((X ≤ t) ∩ Ω+ ) (since X ≤ t on Ω? ∪ Ω− )
≥ 1 − P ((Y ≤ t) ∩ Γ+ ) (since Y ≤ X on Ω+ )
≤ P (Y ≤ t) = FY (t).
Exercise 2.16 Deduce Lemma 2.12 from Lemma 2.14.
2.3.5
Characterization in terms of quantile functions
Proposition 2.17 Let X and Y be such
E(X) = E(Y ). Then X (SM P S Y is and only
" that
−1
FX (p) ≥ FY−1 (p) if p ≤ p0 ;
if there exists some p0 ∈ ]0, 1[ such that
FX−1 (p) ≤ FY−1 (p) if p > p0 .
Once again the condition at point p0 could be omitted. If the cumulative distribution functions
are one to one, the proposition can be understood graphically (Figure 2.5).
2
t0
p0
0
FY−1
FX−1
!
!
!
!
!
!
FX
" !
!
"
! "
FY
!
!
!
0
p0
t0
2
Figure 2.5: quantile characterization
Lemma 2.18 Let X and Y be real valued random variable such that E(X), E(Y ), V (X) and
V (Y ) are finite, then X %SM P S Y implies that V (X) ≤ V (Y ).
Proof 2.19 It suffices to show that E(Y 2 ) ≥ E(X 2 ) or that E((Y − a)2 ) ≥ E((X − a)2 ) for
some a since E(X) = E(Y ). From Proposition 2.17,there exists some p0 ∈ ]0, 1[ such that
" −1
FX (p) ≥ FY−1 (p) if p ≤ p0 ;
FX−1 (p) ≤ FY−1 (p) if p > p0 .
We can consider a = FY−1 (p0 ), one gets both
" −1
|FX (p) − a| ≥ |FY−1 (p) − a| if p ≤ p0 ;
|FX−1 (p) − a| ≥ |FY−1 (p) − a| if p > p0 .
Consequently, |FX−1(p) − a| ≥ |FY−1(p) − a| for any p. We can conclude by an application of
Proposition 1.13.
17
2.3. SMPS DOMINANCE
Exercise 2.20 Prove again Exercise 2.6 using quantile characterization.
Exercise 2.21 Prove again Exercise 2.7 using quantile characterization.
2.3.6
Application to stop-loss insurance
The setting will be the following: let us consider a decision maker which is either a client of
an insurance company who wants to insure himself or an insurance company that wants to
reinsure itself. The decision maker has an initial wealth w > 0 (real number) and faces a risk
which leads to possible losses X ≥ 0 (stochastic) such that E(X) is finite. He can buy an
insurance contract defined by its profile of reimbursement X ≥ I ≥ 0, priced using a shared
loading factor (the premium π(I) = (1 + λ)E(I)). The kind of insurance contract, he is allowed
to use, is limited to this class. Finally, we assume that the decision maker is averse to simple
mean preserving spread: in front of two risky situations B and C, if B (SM P S C, the decision
maker will prefer B.
Proposition 2.22 Let I be some initial insurance contract, then there exists some parameter
d such that the associated stop-loss insurance contract is preferred to his initial contract.
Proof 2.23 An indemnity Id is a deductible insurance contract of parameter d if Id (ω) =
(X(ω) − d)+ := max(X(ω) − d, 0). The sketch of the proof is
• determine the value of d
• check that the final wealth if he uses the contract Id is less risky with respect to SMPS
than the initial final wealth for the parameter t0 = d.
For the first step, d will be chosen in such a way that the price of the stop loss insurance
will be the same as the initial one. Since 0 ≤ I ≤ X, one gets that 0 ≤ E(I) ≤ E(X).
Let us consider an auxiliary function ϕ : R+ → R+ defined by ϕ(d) = E(Id ) = E(X − d)+ .
It is easy to show that ϕ is continuous and non-increasing, and satisfies ϕ(0) = E(X) and
limd→+∞ ϕ(d) = 0. We can apply intermediate value theorem to get the existence of some d
(non necessarily unique) such that ϕ(d) = E(I). For such a value of d the price πd of the stop
loss insurance will be the same as the initial one π.
For the second step, one has to compare the final wealth Zd if he uses the contract Id is less
risky with respect to SMPS than the initial final wealth Z.
"
Z(ω) = w − π − X(ω) + I(ω)
Zd (ω) = w − πd − X(ω) + Id (ω)
In view of Proposition 2.10, one has the equivalence
Zd (SM P S Z ⇔ Yd (SM P S Y
where Y = w − π − Z and Yd = w − π − Zd . These variables Yd = X − (X − d)+ and Y = X − I
represents the amount of damage uncovered by the insurance contract. In particular
"
X(ω) if X(ω) ≤ d
Yd (ω) =
d
if X(ω) > d
18
CHAPTER 2. RISK ORDERING
Since the two insurance contracts share the same premium, they have the same expectation and
therefore E(Y ) = E(Yd ). In order to conclude, let us discuss4 with respect to t
• If t < d, then in one hand, the event Yd < t is a subset of the event X < d (case of small
damage), and on this set Yd = X, consequently, FYd (t) = FX (t). On the other hand, since
I ≥ 0, Y = X − I ≤ X and FY (t) ≤ FX (t) (in fact true, for any t). We can conclude
that in this case, FYd (t) ≤ FY (t).
• If t > d, then the event Yd > t is impossible. Therefore FYd (t) = 1 ≥ FY (t).
2.3.7
A missing property
1.0
1.0
FX
1.0
FZ
0.5
0.5
0.5
FZ
FY
FY
0
FX
0
0
2
0
0
2
0
2
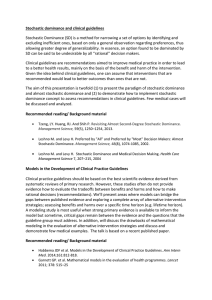
Figure 2.6: FX and FY
1.0
1.0
FX
1.0
FZ
0.5
0.5
0.5
FY
0
0
0
2
0
0
2
0
2
Figure 2.7: FX and FY
Let us analyze the left part of Figure 2.6, clearly since the sign FX −FY changes three times,
it is impossible to compare X and Y with respect to SMPS order. But if we introduce a third
variable Z(Figure 2.7), then we can understand that Z (SM P S Y (middle part of Figure 2.6)
and X (SM P S Z (right part of Figure 2.6). This means that the concept of SMPS ordering
is not transitive which shows that we need to introduce a new concept since as noticed by
Rotschild and Stiglitz, a definition of “greater risk” should be transitive.
4
An alternative proof of this point can be done by applying Lemma 2.14.
19
2.4. MPS DOMINANCE
2.4
2.4.1
MPS dominance
Lemmas
Lemma 2.24 If E(X) = E(Y ), then the following properties are equivalent
' p −1
' p −1
F
(u)
du
F (u) du
X
i) for any p ∈ ]0, 1[, 0
≥ 0 Y
p
p
' 1 −1
' 1 −1
FY (p) dp
FX (p) dp
p
p
≤
ii) for any p ∈ ]0, 1[,
1−p
1−p
Proof 2.25 Let us first remark that the denominator can be omitted. Let us introduce two
auxiliary functions:
(
'p
'p
ϕ(p) = 0 FX−1 (u) du − 0 FY−1 (u) du
'1
'1
for any p ∈ [0, 1],
ψ(p) = p FX−1 (u) du − p FY−1 (u) du
In view of our assumption, ϕ(p) + ψ(p) = E(X) − E(Y ) = 0. Consequently they have opposed
signs.
Lemma 2.26 If X (SM P S Y , then for any p ∈ ]0, 1[,
' p −1
' p −1
F (p) dp
F
(p)
dp
X
0
≥ 0 Y
p
p
Proof 2.27 With the notations of Lemma 2.24, we want to show that ϕ is non negative. Since
ϕ! (p) = FX−1 (p)−FY−1 (p), we already know that ϕ is non-decreasing on [0, p0 ] and non-increasing
on [p0 , 1]. But ϕ(0) = ϕ(1) = 0, it suffices to fill the table in order to get the sign.
p
p0
0
ϕ! (p)
+
1
−
ϕ(p)
0
2.4.2
0
Definition
Definition 2.28 The random variable X is less to be less risky than Y in the sense of Mean
Preserving spread order (or of the stop loss order) if and only if
) p
) p
−1
FX (u) du
FY−1 (u) du
E(X) = E(Y ) and for any p ∈ ]0, 1[, 0
≥ 0
.
p
p
20
CHAPTER 2. RISK ORDERING
It is easy to check that the ordering (M P S is transitive. Clearly, in view of Lemma 2.26,
one has also
X (SM P S Y ⇒ X (M P S Y.
It is also easy to check that the ordering (M P S is transitive.
This definition can be interpreted as a ranking about the worst case, which is contexte
dependent. Let us consider the p = k/100. If X and Y are financial assets, it means that
“the average payoff to be expected among the k% smallest possible payoff is greater with X
than with Y ” while in the context of claims “the average claim to be to paid in case of claims
belonging to the (100 − k)% greatest ones is smaller with X than with Y ”. An agent i will be
said strongly strict averted if X (M P S Y ⇒ X (i Y.
Let us now pay attention to the discrete case when the n outcomes are equiprobable . Let
us assume that the possible values are ranked: x1 < x2 < . . . < xn and y1 < y2 < . . . < yn .
Then X (M P S Y is equivalent to
x1 + x2 + . . . + xn = y1 + y2 + . . . + yn
x1 ≥ y1
x1 + x2 ≥ y1 + y2
... ≥ ...
x1 + x2 + . . . + xn−1 ≥ y1 + y2 + . . . + yn−1
Exercise 2.29 Let us consider this distribution, compare in the sense of MPS order X and Y .
event
σ1 σ2 σ3 σ4
probability 1/4 1/4 1/4 1/4
X
3
4
7
6
Y
8
2
4
3
2.4.3
Characterization
Theorem 2.30 (Rotschild and Stiglitz, 1970) Let us assume that E(X) = E(Y ), then the
following statement are equivalent:
• X (M P S Y ;
• there exists a sequence (X0 , . . . , Xn , . . .) of random variables such that X0 = X, for each
n, Xn+1 (SM P S Xn and Xn →n→+∞ Y . (convergence in law5 )
As particular case, in the case of the example treated in Subsection 2.3.7, it is possible to
build the following sequence: X0 = X, X1 = Z, and for each n ≥, Xn = Y . Since for each
Xn+1 (SM P S Xn , we can conclude that X (SM P S Y .
Proposition 2.31 (Rotschild and Stiglitz, 1970) Let us assume that E(X) = E(Y ), then
the following statement are equivalent:
5
pointwise convergence of the characteristic functions, or equivalently convergence of FXn (t) to FY (t) when
FY is continuous at point t.
2.4. MPS DOMINANCE
21
i) X (M P S Y ;
'x
'x
ii) for any x, −∞ FX (t) dt ≤ −∞ FX (t) dt.
iii) for any d, E((X − d)+ ) ≤ E((Y − d)+ )
If in addition, X an Y are assumed to be bounded then the following statement are equivalent:
i) X (M P S Y ;
iv) for any u non decreasing and concave, E(u(X)) ≥ E(u(Y )).
v) for any u concave, E(u(X)) ≥ E(u(Y )).
Remark 2.32 Condition ii) is known in the literature as Second Order Stochastic Dominance,
so if E(X) = E(Y ), then X (SSD Y is equivalent to X (M P S Y . Clearly, X (F SD Y implies
X (SSD Y .
Remark 2.33 Condition iii) means that the premium of a stop-loss insurance will be lower.
Exercise 2.34 Let us consider X following a normal law N (m, 1), Y = 2X and Z = −X.
• Compare X and Y with respect to MPS order.
• Compare X + Z and Y + Z with respect to MPS order.