")
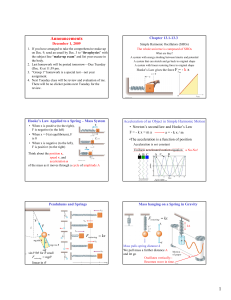
Two important examples of s.h.m. © D Hoult 2010 The mass / spring oscillator The mass / spring oscillator net force acting on the mass = zero A graph of force against extension for a spring is a straight line passing through the origin: force a extension A graph of force against extension for a spring is a straight line passing through the origin: force a extension The constant of proportionality, k is called the elastic constant of the spring (usually considered to be a positive number) When the displacement is downwards, the net force is upwards and vice versa So a better way to draw the graph would be In this case, F represents the force with which the spring “pulls back” when it is given an extension x by some external agency slope = - k F = -kx F = -kx If the mass is released after having been given a displacement, x, then its acceleration will be a= F = -kx If the mass is released after having been given a displacement, x, then its acceleration will be a = -kx m F = -kx If the mass is released after having been given a displacement, x, then its acceleration will be a = -kx m So the motion is s.h.m. and the constant of proportionality between a and x has magnitude F = -kx If the mass is released after having been given a displacement, x, then its acceleration will be a = -kx m So the motion is s.h.m. and the constant of proportionality between a and x has magnitude k m F = -kx If the mass is released after having been given a displacement, x, then its acceleration will be a = -kx m So the motion is s.h.m. and the constant of proportionality between a and x has magnitude k m which is equal to w2 in the “shm equation” Remembering that T = 2p w we can suggest that the time period of a mass spring oscillator is given by Remembering that T = 2p w we can suggest that the time period of a mass spring oscillator is given by T = 2p m k The simple pendulum F= F = mg sin q F= F = - mg sin q a= a = - g sin q q= x q= L If we make sure that q is a small angle If we make sure that q is a small angle, sin q can be replaced by q g x a=L