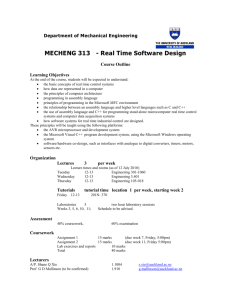
MONASH UNIVERSITY DEPARTMENT OF ELECTRICAL AND COMPUTER SYSTEMS ENGINEERING ECE4053 ELECTRICAL ENERGY – GENERATION AND SUPPLY SYSTEM STABILITY –EXPERIMENT 2 AIM (a) To carry out stability studies to investigate the effect of excitation controls on system dynamics. (b) To obtain experience using a commercial power systems simulation tool. REFERENCES Power System, Analysis and Design, Glover and Sarma, Brooks Cole Electrical Power Systems, Guile and Paterson, Pergamon Press. Electric Power Systems, Weedy, Wiley. Power System Stability and Control, Kundur, McGraw Hill (ebook). EQUIPMENT To simulate the power system in this task, the PSS/E software tool will be used. PSS/E is a package of power system analysis programs, used by the major transmission authorities in Australia. In this particular lab, you will use the System Dynamics part of that package. IMPORTANT Students enrolled in ECE5153 are required to complete Section 2.4. For ECE5153 students the lab will be marked out of 12 marks. For students enrolled in ECE4053, this lab will be marked out of 10 marks. Thus, section 2.4 is optional for ECE4053 students. We will award up to 2 bonus marks for ECE4053 students who attempt section 2.4. These bonus marks will NOT carry over to other assessment tasks for this unit. AIM OF EXPERIMENT Stability experiment 1 aimed to indicate the effect of network configuration on the stability of a power station with synchronous generators. The typical system parameters demonstrated in that laboratory exercise were fault clearance time, number of transmission lines, series capacitors in a line and a STATCOM connected to a busbar. Other system parameters include sectionalising of transmission lines. 2 ECE4053 - LAB PRAC – EXP 6 Those studies were based on the “classical” model which models the generators as a constant voltage and the transient reactance and the inertia constant. This model provides a reasonable representation of the “first swing” of the response to a large disturbance fault and fault clearance. However, the model does not contain a representation of oscillatory damping and the response shows a sustained constant amplitude oscillation. This simulation experiment aims to indicate the effect of different types of excitation control. In practice, both the system parameters and generator controls are used for achieving required system stability performance. GENERATOR MODEL The advanced generator model used for this experiment represents a “round rotor” synchronous generator as typically used for power stations with high speed steam or gas powered turbo-generators. This model is used for some generators for studies of the stability and dynamic performance of the Australian National Grid. The field winding is represented by the transient reactance Xd’ and the time constant Td0’. The constants Xq’ and Tq0’ represent the quadrature axis of the rotor for the longer time constants associated with the field winding. The “damper” windings cause oscillations of the rotor angle to be damped ie after a disturbance, the oscillations die away. The “damper” windings are represented by the subtransient reactances Xd’’ and Xq” and the sub-transient time constants Td0’’ and Tq0’’. The rotor pole axis is determined using the reactances Xd, Xq. The model represents the inertia of the turbo-generator by the inertia constant H. Figure 1 Synchronous Generator Rotor Windings ECE4053 - LAB PRAC – EXP 6 3 AUTOMATIC VOLTAGE CONTROL BY A SYNCHRONOUS GENERATOR Power systems are required to supply customers with high quality electricity. That requires both the voltage and frequency to be kept within tight limits in normal operation. The system load and generation are constantly changing and the voltage and frequency have to be controlled automatically to meet the required standards. The main source of dynamic voltage control is by controlling the excitation of synchronous generators. This equipment is referred to as “Automatic Voltage Regulator” or an AVR. In addition to controlling voltage in normal conditions, the AVR is required to control the system dynamics during and following major disturbances such as short circuits, generator trip and tripping of large loads. Modern high performance excitation systems are used to substantially improve the dynamic performance of power systems. The high performance of these AVR systems enables the generator to develop additional electrical power following fault clearance and therefore improves transient stability performance and reduces the initial angular response. However as with many control systems, high gain results in reduced damping of the oscillations following a disturbance and the response to a disturbance could even become an un-damped oscillation ie unstable. Modern excitation systems retain the fast response and improvement in transient response of the AVR by including a Power System Stabiliser (PSS) that introduces signals into the AVR with appropriate phasing to improve the damping performance. 4 1.0 ECE4053 - LAB PRAC – EXP 6 Generator Excitation Control of System Voltage The network to be investigated in this study is shown in Fig. 2. A power station, NEWPS is proposed to have four 500MW turbo-generators connected to the main generation and load supply system by two 100kM 500kV lines. GenA 20 10 30 Line 1 Line 2 MAIN NEWPS Three phase short circuit System Causes Line trip 4 500 MW turbo-generators Figure 2 : System with 4 x 500MW generators 1.1 Design Criteria. Transient Stability: The government regulator of the electricity market has declared that the power station must remain in synchronism following a three phase fault on either line with subsequent trip (disconnection) of the faulted line. Damping: The oscillations following a disturbance should be adequately damped. The Australian “National Electricity Rules”, NER, specifies adequate damping as the amplitude of the oscillations reaching less than half amplitude in 5 seconds. Fault Clearance: The NER specifies fault clearance times for the various voltage levels in a system. For these studies, a typical fault clearance time will be used. 1.2 Design Task. You are part of the system design team and you are required to carry out dynamic studies to determine the effect of using a modern high speed excitation system. ECE4053 - LAB PRAC – EXP 6 5 1.3 Dynamic Studies – Procedure This experiment uses the procedure used for System Stability – Experiment 1. Place the directory (ECE4053_Dynamics-Lab_2_2019) of the cases provided on the desktop. For each case • The system data can be obtained from a file case_conv.sav, • The generator data can be obtained by loading a file case.snp, • The results will be saved in a file case.out. • The plot data can be obtained from case.out and the Plot Tree should be selected. Plot Tree view is required to access the output quantities. It may be necessary to unselect Plot Tree and then reselect it. Multiple responses can be displayed on the same graph by selecting the separate case.out files. NOTE The integration time step has been set to 0.001 seconds for these control studies. To avoid excessive output, in the Simulation dialogue, set “Print every” and “Write every” to 10. For each condition Initialise the case and run for 1.0 secs with no disturbance. Simulate the response for a fault clearance times of 0.07 secs on bus 20 – bus 30 line , ID 1. This puts a fault on the bus 20 end of the line. Run the simulation for 5 seconds. Save the results for each condition with separate .out file names. 6 2 ECE4053 - LAB PRAC – EXP 6 Dynamic Studies 2.1 Fixed field voltage In this study, the generator does not have a voltage control system and the excitation voltage Efd is therefore constant. This enables the performance of the generator to be investigated apart from control systems. Use the directory NEWPS+CONSTANT Efd. Questions. [4 marks] Plot the response of the generator angle, electrical power, terminal voltage and field voltage. [2 marks] Describe the initial transient response and the subsequent oscillatory performance. [1 mark] How can the damper windings physically determine the damping of the angular response. What are the period and frequency of the angular response? [0.5 mark] Study the dynamic response for a fault clearance time of 0.07s and 0.1s. Use the electrical power response to explain why the angular response is unstable. [0.5 mark] [4 marks: 2 marks for plots, and 2 marks for providing discussion as above] 2.2 High Speed Automatic Voltage Regulator (AVR) Use the Directory NEWPS+AVR. A modern high speed AVR is represented on each of the four 500MW generators at NEWPS. The block diagram of the AVR is shown in Figure 3. EFD-max Vref Vt KA 1 + TE s EFD EFD-min Figure 3 Excitation Data High Speed Automatic Voltage Regulator Ka 200, TE 0.015 secs Questions. [3 marks] On the same graph, plot the angular response for a fault clearance time of 0.07 secs for fixed excitation voltage and for the AVR case. [1.5 marks] How does the “first swing” angular response compare with the response for fixed field voltage for the case with the AVR? [0.5 mark] ECE4053 - LAB PRAC – EXP 6 7 Describe the angular response after the first swing. What are the period and frequency of the angular response? What has caused the difference from the constant Efd case? [0.5 mark] Mark the parts of the Efd response where Efd reaches a maximum limit (commonly called a “ceiling” limit). From the results, what effect does this limit on Efd have on the terminal voltage and power response? [0.5 mark] [3 marks: 1.5 marks for plots, and 1.5 marks for discussion as above] 2.3 High Speed Automatic Voltage Regulator (AVR) and Power System Stabiliser (PSS) Use the Directory NEWPS+AVR+PSS. A modern high speed AVR and PSS is represented on each of the four 500MW generators at NEWPS. The block diagram of the AVR&PSS is shown in Figure 4. EFD-max Vref Vt KA EFD EFD-min HLIM Generator Speed K TW s 1 + TW s 1 + T1 s 1 + T2 s -HLIM Figure 4 High Speed Automatic Voltage Regulator and Power System Stabiliser The AVR is as investigated in 5.2 with KA=200. The first block of the PSS is referred to as a “washout filter”. It has a long time constant, 1.4 secs here, to ensure the PSS does not respond to the usual slow changes in generation output as system conditions change. The other blocks are designed to achieve appropriate phasing of the feedback signal relative to the voltage change signals. The PSSE standard model used for the AVR is “SEXS” and the model for the PSS is “STAB1.” The first block of the PSS model in PSSE is a combination of the PSS gain and the washout time constant as shown in Figure 5. Generator Speed Figure 5 K's 1+Tws 1 + T1 s 1 + T3 s 1 + T2 s 1 + T4 s PSSE representation of Power System Stabiliser 8 ECE4053 - LAB PRAC – EXP 6 For the PSSE stabiliser model, STAB1, the values of the stabiliser gain and washout time constant are combined to a single value, K'=K x Tw. The values in the list of parameters are K'/Tw (ie K) and Tw. Only the first phasing block is used in this example. T3 and T4 are set to unity to cancel the second phasing block. The values of the parameters taken from a practical case are :KA=200, K = 9.5, Tw=1.4, T1=0.154, T2=0.033 Consequently K= K'/Tw = 9.5 (example P.Kundur Power System Stability and Control, p865) Questions [3 marks] For the fault clearance time of 0.07 secs, plot on the same graph the angle, power, terminal voltage and field voltage responses for the AVR alone and the AVR + PSS. [1.5 marks] Indicate how the Efd response has been changed by the operation of the PSS. [0.5 mark] What effect does the changed Efd response have on the power and terminal voltage response. Discuss the improvement in response achieved by using the AVR /PSS compared with the AVR alone. [1 mark] [3 marks: 1.5 marks for plots, and 1.5 marks for discussion as above] SECTION 2.4 IS COMPULSORY FOR STUDENTS ENROLLED IN ECE5153 AND IS WORTH 2 MARKS. STUDENTS ENROLLED IN ECE4053 ARE WELCOME TO ATTEMPT THIS EXERCISE TO EARN 2 BONUS MARKS. 2.4 Evaluation against Australian National Electricity Rules The Australian National Electricity Rules state that transmission fault clearance times cannot exceed 0.1 secs with all main transmission in service before critical faults. Times up to that level occur on existing Australian power systems. For the AVR + PSS, study the response for a find the critical fault clearance time of 0.1 sec and determine if the system is compliant with the rules. [1 marks] Explain why the design is called a “robust control system” able to adapt to a wide range of conditions. [1 mark] ECE4053 - LAB PRAC – EXP 6 3.0 9 Written Report. The report should include plots of the angle, electrical power, reactive power, terminal voltage and field voltage for :• Fixed Field voltage (clearance time 0.07 and 0.1 seconds) • AVR only (clearance time 0.07 seconds) • AVR and PSS (clearance time 0.07 seconds). • For ECE5153 students: AVR and PSS (clearance time 0.1 seconds). The report should discuss the characteristics of the plots ie whether the first swing is stable, the damping of oscillations after the first swing and the effect of using a high performance AVR compared with a combination of AVR and PSS.. Each group is required to write a report on the study, for electronic submission by the due date. The report should be in a short concise form, and must include: • • • • Aim Introduction (i.e. System Description) Results with embedded discussion Conclusion Professor Peter Wallace – 2017 Revisions by A.B. Morton – 2019 Revisions by L. Bernard – 2020