An Optimal Charging and Discharging Schedule to Maximize Revenue for Electrical Vehicle
advertisement

An Optimal Charging and Discharging Schedule to
Maximize Revenue for Electrical Vehicle
Yee-Ting Chai, Wooi-Nee Tan, Ming-Tao Gan, Sook-Chin Yip
Faculty of Engineering
Multimedia University
Cyberjaya, Malaysia
chaiyeeting96@gmail.com, wntan@mmu.edu.my, mtgan@mmu.edu.my, scyip@mmu.edu.my
Abstract—Vehicle to grid (V2G) is a feasible solution that enables Electrical Vehicles (EVs) to serve as either fast-responding
storage devices or generators to grid system, providing a lowcost energy production alternative which benefits electricity
supplier. A coordinated schedule in charging and discharging
can potentially allow the electrical vehicle owners to benefit from
the revenue gain, and thus increase the participation rate of EV
owners in V2G. This paper presents a linear programming model
that produces an optimized charging-discharging schedule for EV
owners while accommodating constraints in travel requirement,
battery maintenance and degradation cost. The proposed model
is flexible to cater for individual driving patterns by allowing
the owners to set their preference on parking and on-road
time according to their itinerary. Simulations are carried out
to evaluate the performance of the optimized charging schedule
of the proposed model for continuous or fragmented short and
long-distance settings. The optimized schedules obtained from the
proposed model perform better than the uncoordinated schedules
with a higher return of revenues for all the case studies under
consideration. The proposed model shows 250% improvement in
individual revenue gain for short distance traveller who follows
the optimized schedule as compared to uncoordinated chargingdischarging profile. The proposed model can also precisely
estimate the driving demand of EV owners and reserve adequate
amount of battery charge before each trip.
Index Terms—electrical vehicle, linear programming, optimization, charging and discharging schedule, smart grid, vehicle to
grid (V2G)
I. I NTRODUCTION
Public awareness and concern towards environmental and
energy sustainability issues have promoted the transition of
conventional fossil fuel dependant vehicles to electrified transportation mode. It has been estimated that Electrical Vehicle
(EV) could achieve annual sales of 1.2 million units in USA,
3 million units in China by 2025, and 41 millions units
worldwide by 2040 [1]. EV technology has improved over
the years due to clean energy demand. This enables EVs
to be more energy efficient as they require lower electrical
charging cost as compared to fluctuating fossil fuel price for
equivalent energy [2], [3]. Most EV owners are travelling short
distances to workplace and their EVs are parked idle at 96%
of the day [4]–[6]. Studies have proven these idle periods
are feasible to realize Vehicle to Grid (V2G) technology.
V2G capitalizes on the capability of EVs to contribute energy
back to the grid system during peak hours and act as energy
storage device that stores extra charge during valley load [7].
978-1-7281-3276-1/19/$31.00 ©2019 IEEE
Unfortunately, EV owners who have varying driving demand
are uncertain on the amount of energy required to support
their upcoming trips. They tend to have a typical “plug and
charge” behavior [7], [8], which is charging their EV fully
as soon as possible after work. This subsequently poses great
difficulty in integrating EVs into smart grid system as their
charging profile is irregular and unpredictable. This paper
focuses on the economic benefits for EV owners in selling
the excess energy without compromising their daily driving
demand while encouraging EV owners to shift their heavy
loads such as EVs on voluntary basis from peak hours. The
developed optimization model is essential for precise load
forecasting which aids in Demand Side Management (DSM) of
electricity supplier [9]. EV is considered a heavy but shiftable
power load as it can start charging or discharging almost
instantaneously when it is plugged in. Therefore, the fastresponding ability of EV in V2G program shall be utilized
to discharge power to grid system during peak load but store
power during valley load. If charging-discharging schedule of
EV is pre-known to the electricity supplier, the grid operator
is able to schedule peak generator operation more accurately.
This is a financial win-win situation for both parties.
II. R ELATED W ORK
Minimizing charging cost is one of the major concerns
of EV owners. Maigha and Crow [3] proposed a quadratic
mixed-objective optimization problem that couples both system load factor and EV charging cost through implementation
of economic-based demand response (DR). Maigha’s and
Crow’s paper investigated the effect of two different pricing
schemes, namely fixed and Time-of-Use (TOU) scheme when
they are applied in the optimization model. They showed
that TOU pricing scheme incurred lower charging cost for
most EV owners but proper mixed of both pricing scheme
benefited every EV owner and grid system. TOU is defined as
electrical tariff that varies proportional to electricity demand
of the consumers. The electricity cost in TOU tariff scheme
is higher during peak hours but lower during off-peak hours.
Therefore, TOU is more economically beneficial for EV owner
when single EV could intelligently arrange its charging plug-in
time, as shown in the work of Cao et al. [8]. Another approach
of minimizing EV charging cost is through Vehicle-to-Grid
(V2G) technology which is not considered in the optimization
240
Authorized licensed use limited to: Carleton University. Downloaded on November 07,2020 at 14:08:15 UTC from IEEE Xplore. Restrictions apply.
model in [3] and [8]. Various V2G applications are discussed
in [3], [8], [10]–[12]. V2G allows EV to feed electricity
back to grid system when necessary to aid in balancing grid
supply and demand. For instance, EVs are capable to store
the excessive electricity during peak production of renewable
energy and discharge when the supply is insufficient to support
increasing electrical demand during peak load [3], [11]. Li,
Zou, and Li [4] proved that EVs should perform charging,
discharging and frequency regulation services most of the time
to gain the maximum economic benefits. They also showed
that a larger Depth of Discharge (DoD) which results in
charging-discharging action can cause EV battery to degrade.
DoD is a measurement of discharged battery energy in a cycle
that possibly reduces battery lifespan [10].
III. M ATHEMATICAL M ODEL
In this work, single EV case is considered as it has relatively
simple infrastructure and easier to be installed with current
technology. This framework serves as a basic system that
is intended to be integrated into the bigger grid system
[15]. Due to varying driving behavior, a linear programming
optimization model is presented in this section to decide on
the optimized charging-discharging schedule based on owners’
planned journey in multiple time intervals.
A. Assumption and Parameters in Model
The optimization model is developed based on a few assumptions as follows:
1) Driving pattern of EV owners is based on individuals.
The location at each time slot is known through Global
Positioning System (GPS) tracking.
2) Mobility of EV is ensured. State Of Charge (SOC) of
battery (fuel gauge measurement on the current battery
capacity) [10] at departure time is always able to support
for the next trip.
3) Charging level of EV is based on battery capacity as it
is a more realistic case which is explained in [16]. Slow
charging mode that has 20% of battery full capacity as the
charging stations are assumed to be installed in a building
(i.e., office or house).
4) EV is unable to participate in V2G activity if it is
travelling on road.
5) Energy consumption of EV battery due to driving is
linearly proportional to the travelled distance.
6) All charging stations have V2G infrastructure that allows
bidirectional energy transfer between EV and the grid
system.
7) Battery degradation cost is modelled as a summation of
linear energy throughput cost as well as quadratic powerrelated battery degradation as described in [6].
V2G activity should be performed without neglecting EV
owners’ driving demand and EV battery degradation. Li et
al. [10] developed a binary integer programming problem to
determine an optimal charge-discharge schedule that satisfied
EV owners’ driving demand and leverage the extra load due to
EV charging through real-time communication with grid operator. However, the battery degradation cost is not considered
in Li’s paper. Calvillo et al. [7] proposed an optimal charging
strategy for EVs that takes both V2G and battery degradation
into account. It was concluded that the battery degradation
cost must be at least ten times lower than the V2G rewards to
make it worthwhile for EV owners to participate. In Cavillo’s
paper, the driving profile of the EV owner is not considered.
The optimization period is only schedule for night time, which
reduces the allowable time span in V2G activities. Schuller
et al. [6] discussed different EV owners’ charging strategies,
namely As Fast As Possible (AFAP), Smart Charging and V2G
application.
In this work, a linear programming (LP) optimization model
is presented on top of the reviewed literature work. Instead of
only depending on total daily commuted distance as in [1], [3],
[7], [8], [12], [13], the proposed model is customized based on
individual personal trips of varying time intervals. EV range
anxiety is eliminated as this model can precisely reserve and
charge to adequate battery energy before next trip. This model
provides higher flexibility and convenience to EV owners as
EVs are not forced to charge nearly fully (i.e., more than 80%)
every time before departure [1], [4], [13], [14]. Instead, EV
could have multiple intermediate charging-discharging cycles
in between trips to achieve the highest revenue gain.
Battery is another important issue when considering V2G
application in our model as it accounts for high capital cost
in EV [7], [13]. High battery degradation cost that surpasses
the V2G rewards of EV owners would discourage EV owners
to participate in this revenue gain program. The focus of
the developed model is on maximizing individual revenue
gain that will greatly boost EV ownership without neglecting
transportation requirement and battery degradation. Customers
satisfaction and willingness to utilize EV as storage device or
generator to grid system promote success of the V2G program.
B. Optimization Model for Maximum Revenue Gain of EV
owners
Consider an EV has an activity profile during time slots in
Γ = {1, 2, ..., T }. A single EV can either charge, discharge,
travel on road or stay idle at each time slot t. Decision
variables of either charge or discharge are based on two binary
variables, xt and yt , defined at time slot t as follows:
1, if EV battery is charged at time slot t
xt =
0, otherwise
1, if EV battery is discharged at time slot t
yt =
0, otherwise
The travel period of each trip is already decided by EV
owner and is represented by a binary variable, Rt . It must
not overlap with charging-discharging time slots. Charging and
discharging time slots of EV owners must only occur when
EV is parked at charging station with V2G infrastructure, as
241
Authorized licensed use limited to: Carleton University. Downloaded on November 07,2020 at 14:08:15 UTC from IEEE Xplore. Restrictions apply.
indicated by pt . Rt and pt are thus pre-set by the EV owner
with the following binary values:
1, if EV is parked at charging station at time slot t
pt =
0, otherwise
1, if EV is travelling on road at time slot t
Rt =
0, otherwise
TABLE II
O PTIMIZATION M ODEL FOR S MART C HARGING AND D ISCHARGING OF
EV
Maximize:
PT
chg
dis
+ (Pc ηc )2 dp + Pc ηc de )xt ]
t=1 z = pt [ηdis Pdis ct yt − (Pc ct
The other required parameters are defined in Table I. The complete optimization model for optimal charging and discharging
schedule of EV is outlined in Table II.
subject to:
yt + xt ≤ pt , ∀t ∈ Γ
(1)
SOCt = SOCt−1 + ∆SOCt−1 , ∀t ∈ Γ
(2)
SOCmin ≤ SOCt ≤ SOCmax , ∀t ∈ Γ
(3)
pt [Pc ηc xt − Pdis yt ] − Rt (lt+1 − lt )ηkm × 100%
∆SOCt =
, ∀t ∈ Γ
Ebat
(4)
TABLE I
I NPUT PARAMETERS IN M ATHEMATICAL M ODEL
SOCt ≥
(lt+∆T − lt )ηkm × 100%
, ∀t ∈ Γ
Ebat
(5)
when Rt = 1, ..., Rt+∆T −1 = 1
Parameters
ηdis
Pdis
cchg
t
cdis
t
Pc
ηc
dp
de
SOCt
SOCmin
SOCmax
SOC0
∆SOCt
lt
nkm
Ebat
∆T
Definition
discharging efficiency of EV
discharging power from EV to grid
Time-of-Use (TOU) electrical charging tariff at time slot t
feed in tariff (V2G reward) at time slot t
charging power from charging station to EV
charging efficiency of EV
power-related battery degradation cost
energy throughput battery degradation cost
State of Charge (SOC) of battery at the start of time slot t
mnimum State of Charge (SOC) of battery
maximum State of Charge (SOC) of battery
initial State of Charge (SOC) of battery (given in setup)
change in SOC during time slot t, where ∆SOC0 = 0
distance travelled from initial point of current trip at time slot t
driving efficiency of EV
rated EV battery capacity
travel duration of current trip
unit
kW
USD/kWh
USD/kWh
kW
USD/kWh
USD/kWh
%
%
%
%
%
km
kWh/km
kWh
hour(s)
The objective of the proposed model is to maximize the
revenue gain of the EV owners when they participate in V2G
application while accounting for EV battery degradation cost.
Decision making of optimal charging-discharging schedule is
economically driven by TOU pricing scheme. TOU promotes
DR of EV owners by modifying their electrical consumption
profile to benefit from the change of electrical pricing [17].
Battery degradation cost modelling of our proposed model is
adopted from [6]. As discussed in [6], battery degradation cost
is classified as energy throughput and power fade of battery
due to charging power. Energy throughput in the degradation
cost is related to capacity fade of the battery due to loss of
lithium ions when they are undergoing irreversible chemical
reaction to produce energy in charging or driving process
without any temperature changes [18]. Power-related battery
degradation cost is associated with effect of C-rate (i.e., battery
charging-discharging standard which is the ratio of current
and the rated battery capacity) to the battery wear level as
described in [19].
Ideally, EV is preferred to be charged during valley load
and discharge during peak load, but this situation is subjected
to several constraints as discussed below:
•
Constraint (2): SOC of EV battery at time slot t is the
summation of SOC of EV battery and the change in SOC
during time slot (t − 1).
• Constraint (3): SOC of EV battery at time slot t must be
within the allowable SOC window to prevent complete
charge-discharge cycle that erodes the battery capacity
[7], [10].
• Constraint (4): Change of the SOC in EV battery during
time slot t is caused by charging, discharging, idling or
travelling on the road. Charging increases SOC in the
battery while discharging and travelling on road reduces
SOC value as these activities consume energy of EV
battery.
• Constraint (5): SOC of EV battery at departure time
(indicated by first occurrence of Rt ) must fulfill the
energy demand of the trip. The energy consumption of
EV which travels on road for continuous duration of ∆T
depends on the distance between both locations and the
driving efficiency (kWh/km) of the EV.
The complete optimization model is given in Table II is
further rearranged into proper linear programming(LP) form
as shown in Table III. Techniques to solve the LP model is
standard and the solutions produced are known to be exact.
Constraint (1): EV battery cannot be charged and discharged at the same time. Furthermore, charging and
discharging activities can only be performed when the
EV is parked at charging station.
•
TABLE III
L INEAR P ROGRAMMING M ODEL FOR O PTIMAL C HARGING AND
D ISCHARGING S CHEDULE OF EV
Maximize:
PT
chg
dis
+ (Pc ηc )2 dp + Pc ηc de )xt ]
t=1 z = pt [ηdis Pdis ct yt − (Pc ct
subject to:
yt + xt ≤ pt , ∀t ∈ Γ
For t̃ ∈ {2, ..., T },
t̃−1
X
t=1
t̃−1
X
t=1
t̃−1
X
t=1
t̃−1
pt [Pc xt ηc − Pdis yt ] ≥
X
(SOCmin − SOC0 )Ebat
+
Rt (lt+1 − lt )ηkm
100
t=1
pt [Pc xt ηc − Pdis yt ] ≤
X
(SOCmax − SOC0 )Ebat
+
Rt (lt+1 − lt )ηkm
100
t=1
t̃−1
t̃−1
X
Ebat
+
Rt (lt+1 − lt )ηkm
100
t=1
when Rt = 1, ..., Rt+∆T −1 = 1
pt [Pc xt ηc − Pdis yt ] ≥ (lt+∆T − lt )ηkm − SOC0
242
Authorized licensed use limited to: Carleton University. Downloaded on November 07,2020 at 14:08:15 UTC from IEEE Xplore. Restrictions apply.
IV. R ESULTS AND D ISCUSSION
TABLE IV
S PECIFICATION OF S ELECTED E LECTRICAL V EHICLE [6]
In our experiments, total time slots in a day is set as T = 24.
The data of TOU pricing scheme (peak, off-peak and mid-peak
over 24-hours [17]) and the V2G reward for EV owners (feed
in tariff) is retrieved from [13], as shown in Fig. 1. The car
model, BMW Mini E was selected as transportation medium
in this simulation setting, its battery specification is provided
in Table IV. Since different EV owners have varying driving
profiles, their arrival/departure time and estimated travelled
distance for each trip are different. Different driving profile is
illustrated in Fig. 2. pt is set as 1 when EV is not travelling
on road. The travelled distance of EV at each time slot t, lt
is defined as the absolute distance from the initial point of
the current trip. Initial SOC (SOC0 ) of EV is set as 60% for
all initial case settings. However, the value of SOC0 can be
varied according to the charging habits and travelled distance
[1], [8]. Charging and discharging power is 7kW as explained
in Assumption (3) in Section III.
Parameters
Consumption [kWh/km]
Max Range [km]
Top Speed [km/h]
Full charging time [hours]
Capacity [kWh]
Battery Type
Charging efficiency [%], ηc
Discharging efficiency [%], ηdis
TABLE V
C HARGING AND D ISCHARGING P ROFILE OF E LECTRICAL V EHICLE
OWNERS
Classification of Case
Case 1 (C1)
Case 2 (C2)
Case 3 (C3)
Case 4 (C4)
Fig. 1. Charging and Discharging Rate (USD/kWh) vs Time (hours)
Case 5 (C5)
Fig. 2. Travelled Distance From Initial Point of Current Trip (km) vs Time
(hours)
Cases 1, 2, 4 and 5 simulate a typical working employee
round trip driving profile as presented in Fig. 2. The settings
in Cases 1 and 2 are parallel to Cases 4 and 5, respectively.
However, the charging and discharging schedule of EV for
Cases 1 and 2 is obtained based on the optimal solution of our
proposed model. The charging and discharging strategies for
Cases 4 and 5 are based on typical “plug and charge” behavior.
Case 3 simulates a fragmented driving profile which stops and
resumes short journeys of 12.5km at multiple time intervals.
Case 3 has a total distance similar to Case 1. Detailed profile
for each case is described in Table V. The optimal charging
BMW MINI E
0.14
250
152
3
35
Li-ion
93
93
Characteristics of EV Owners
Optimized schedule based on the proposed model for short distance travelling.
Optimized schedule based on the proposed model for long distance travelling.
Optimized schedule based on the proposed model for short fragmented distance travelling.
Non-optimized schedule for short distance travelling based on behavior as follows:
• Charge as soon as possible to 100% of
the battery capacity
• Discharge during off-peak hours
• Terminate discharge action when SOC
of EV battery reached the minimum
SOC
• Idle most of the time (i.e, not decisive)
Non-optimized schedule for long distance
travelling based on the same chargingdischarging behavior of Case 4
and discharging schedule obtained from the model (Cases 1,
2 and 3) as well as the simulated results for Cases 4 and 5
are depicted in Fig. 3. The results on revenue gain, charging
cost, battery degradation cost and V2G reward for each case
are shown in Table VI. Battery SOC monitoring is illustrated
in Fig. 4. It is obvious that the optimized charging-discharging
schedule significantly outperform the uncoordinated chargingdischarging behavior. Another surprising finding shows that
EV owner in Case 2 who drives for longer distance obtains
higher revenue as compared to uncoordinated short route
traveller in Case 4 even though the former has higher daily
energy consumption. This proves that EV owners who follow
coordinated charging-discharging schedule are likely to cover
their charging cost and earn extra revenue through active
participation in the V2G program.
A. Comparison between coordinated and uncoordinated driving profile
The results in Table VI suggests that EV owners earn more
profit if they follow the optimized schedule as described in
Cases 1, 2 and 3. Besides, economic consideration has driven
the change in charging profile of the EV owners, motivating
243
Authorized licensed use limited to: Carleton University. Downloaded on November 07,2020 at 14:08:15 UTC from IEEE Xplore. Restrictions apply.
TABLE VI
S IMULATION R ESULTS BASED ON D IFFERENT C ASES
Cost(USD)
C1
C2
C3
C4
C5
5.408
0.513
4.270
-3.592
-8.582
Maximum Gaina
Battery Degradation
8.242
7.418
6.594
5.205
6.915
Charging Cost
5.880
5.740
4.760
4.247
5.573
V2G Reward
19.530 13.671
15.624
5.859
3.906
a Maximum gain = V2G Reward − Charging Cost − Battery Degradation
Fig. 3. Charging-Discharging Schedule for Different Cases
Fig. 4. Battery SOC(%) vs Time(hours)
them to store extra charge during off-peak hours in order to
discharge more energy during peak hours. For instance, EV
owner in Case 1 utilizes the greatest portion (41.67%) of a
day for charging and prefers to charge during off-peak period
(50% of its charging slots) as compared to Case 4 (i.e., 28.57%
of total charging slots in uncoordinated charging behavior for
short route travelling). Instead of staying idle, coordinated
EV prefers the EV battery to be charged/discharged whenever
feasible. The minimum SOC is set such that emergency outing
is possible at every time interval.
For coordinated charging-discharging schedule, SOC of EV
battery will not reach the preset minimum value of 20% even
during driving so as to prevent complete charge and discharge
cycle which greatly reduce the battery lifespan. However,
if EV owner practices uncoordinated charging-discharging
behavior as described in Case 4 and 5, their EV might not
be able to sustain the energy consumption of the planned
trip. This occurs in Case 4 where SOC reaches 0% after
the planned trip at time slot 17 and requires an emergency
charging. Besides that, EV in Case 5 that travels for long
distance has to be charged for additional two hours before the
departure of next trip (i.e., time slots 14 and 15). Otherwise,
it will peter out halfway during the journey. The situation
becomes worse if the EV drivers stranded in traffic congestion,
and cannot detour to the nearby charging station.
EV owner in Case 1 that follows optimized schedule has
the highest revenue gain, which is 2.5 times (250%) greater
than the driver in Case 4 that has uncoordinated charging
schedule for short distance. Although EV in Case 2 that
follows optimized schedule for long distance travelling (i.e.,
double the short distance in Case 4) consumes more energy
for driving, it is still able to gain 1.14 times and 1.05 times
more as compared to uncoordinated short and long distance
travelling, respectively.
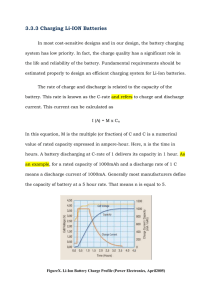
Battery energy throughput cost is set to 0.055 U SD/kW h
(0.05 EU R/kW h) while the power-related battery degradation is set to 0.011 U SD/kW h2 (0.01 EU R/kW h2 ) as specified in [6]. Although battery degradation cost in coordinated
charging profile is slightly greater (1.58 times) than that of
uncoordinated schedule in short distance due to extra charging
and discharging cycle, the battery degradation cost could
be compensated through V2G reward. Battery degradation
cost would be further reduced when the battery technology
becomes more mature in the future. According to [3] and [7],
battery technology is improving throughout the years, which
might make it even cheaper as compared to the simulation
setting. The battery degradation cost due to the V2G activities
might be overestimated after several years.
B. Comparison between short and long distance travelling
This revenue gain program is more beneficial for short
distance traveller in Cases 1 and 3 as compared to Case 2,
which show a revenue gain of 9.5 times and 7.324 times
greater than the long distance traveller of Case 2, respectively.
For short travelling distance, there are more slots available for
low-price charging period (i.e., 37.5% of a day in Case 1 and
33.33% of a day in Case 3 as compared to longer route 29.17%
of a day in Case 2). Furthermore, most of the charging period
for short travelling distance occurs during the low-price period
(i.e., 50% of charging slots in Case 1 and 50% of charging slots
in Case 3 as compared to long distance travelling at 33.33%
of charging slots in Case 2), which subsequently yield better
revenue compared to long driving distance. More energy is
being used for transportation in longer route as reduction of
SOC is proportional to travelled distance (i.e., distance of 1km
will consume 0.4% of battery SOC according to specification
of the selected EV). Hence, proper on-road power management will be applied in coordinated charging-discharging to
ensure sufficient energy to travel to the destination, sometimes
charging during peak period may be unavoidable.
C. Comparison between short continuous and short fragmented distance travelling
There is a slight deviation in revenue gain program when
EV owners have more trips as compared to a single round
trip even though they have equivalent total travelled distance.
The proposed model presents a more precise approach as it
takes the details of every single trip into consideration instead
of depending on daily average commuted distance. In this
work, EVs are more flexible to have multiple charge-discharge
cycles in maintaining adequate charge before each departure.
They are not forced to be charged fully each time after being
244
Authorized licensed use limited to: Carleton University. Downloaded on November 07,2020 at 14:08:15 UTC from IEEE Xplore. Restrictions apply.
plugged in to mitigate range anxiety. Instead, the EV owners
can plan a better charging-discharging schedules according to
their itinerary to gain maximum revenue. As seen from time
slot 14 to 19 (peak hours) in Fig. 4, the optimal schedule prefer
to minimize charging during peak hours. For instance, EV
owners who have fragmented short travelling distance charge
only once (i.e., time slot 18) during peak hours as to sustain its
trip at subsequent hours and recharge again during mid-peak
hour (time slot 21) to sustain its last trip. It shows the flexibility
of the model to have intermediate charging action instead of
continuous charging for extended time (with higher cost) to
support two short trips. Although there was a trip between
time slot 16 and 17, the optimal schedule managed to skip
charging as SOC (50.2%) before departure is sufficient for the
next trip. Continuous travelling distance earns slightly higher
income which is 26.65% more as compared to fragmented
short distance travelling. This is because the number of lowprice charging time slots are relatively less in Case 3 which
causes short fragmented distance travellers to charge more
frequently during mid-peak and peak hours to support their
driving demand.
[4]
[5]
[6]
[7]
[8]
[9]
[10]
V. C ONCLUSIONS
This paper developed a novel linear programming optimization model that maximizes the revenue of EV owner in V2G
program through coordinated charging-discharging schedule
without neglecting EV on-road power management and battery
health. The advantages of this optimization model are as
follows:
1) Higher precision and flexibility for EV owners as it is
customized for personal use based on arrival, departure
time and distance of individual trips as estimated by GPS.
2) Range anxiety of EV owners is alleviated as proper onroad battery power management is performed. Battery
SOC is designed such that it is always adequate for the
completion of upcoming trip before departure.
3) EV owners can have multiple intermediate shallow
charge/discharge actions according to TOU pricing
scheme in between trips to achieve higher revenue gain.
This solution is feasible to realize V2G applications that
allow grid operators to forecast the energy supply based on
preliminary information of charging-discharging schedule of
EV in a community. As future work, we intend to design
another model to ascertain sufficient revenue gain for EV
owners even when larger pool of EVs participate in such
program.
[11]
[12]
[13]
[14]
[15]
[16]
[17]
R EFERENCES
[1]
[2]
[3]
O. Kolawole and I. Al-Anbagi, “The impact of EV battery
cycle life on charge-discharge optimization in a V2G environment,” pp. 1–5, Feb. 2018.
B. Price, E. Dietz, and J. Richardson, “Life cycle costs of
electric and hybrid electric vehicle batteries and End-of-Life
uses,” pp. 1–7, May 2012.
Maigha and M. L. Crow, “Cost-Constrained Dynamic Optimal
Electric Vehicle Charging,” IEEE Transactions on Sustainable
Energy, vol. 8, no. 2, pp. 716–724, Apr. 2017.
[18]
[19]
Q. Li, J. Zou, and L. Li, “Optimum operation on electric
vehicles considering battery degradation in V2G system,”
pp. 2835–2840, Jul. 2017.
T. Cui, Y. Wang, S. Chen, Q. Zhu, S. Nazarian, and M. Pedram, “Optimal control of PEVs for energy cost minimization
and frequency regulation in the smart grid accounting for
battery state-of-health degradation,” vol. 2015, Jul. 2015.
A. Schuller, B. Dietz, C. M. Flath, and C. Weinhardt,
“Charging Strategies for Battery Electric Vehicles: Economic
Benchmark and V2G Potential,” IEEE Transactions on Power
Systems, vol. 29, no. 5, pp. 2014–2022, Sep. 2014.
C. F. Calvillo, K. Czechowski, L. Soder, A. Sanchez-Miralles,
and J. Villar, “Vehicle-to-grid profitability considering EV
battery degradation,” in 2016 IEEE PES Asia-Pacific Power
and Energy Engineering Conference (APPEEC), Oct. 2016,
pp. 310–314.
Y. Cao, S. Tang, C. Li, P. Zhang, Y. Tan, Z. Zhang, and J. Li,
“An Optimized EV Charging Model Considering TOU Price
and SOC Curve,” IEEE Transactions on Smart Grid, vol. 3,
no. 1, pp. 388–393, Mar. 2012.
H. Sherif, Z. Zhu, and S. Lambotharan, “An optimization
framework for home demand side management incorporating
electric vehicles,” pp. 57–61, May 2014.
Z. Li, M. Chowdhury, P. Bhavsar, and Y. He, “Optimizing
the performance of vehicle-to-grid (V2G) enabled battery
electric vehicles through a smart charge scheduling model,”
International Journal of Automotive Technology, vol. 16, Oct.
2015.
A. A. Almehizia and J. M. Snodgrass, “Investigation of V2G
economical viability,” in 2018 IEEE Texas Power and Energy
Conference (TPEC), Feb. 2018, pp. 1–6.
M. A. Ortega-Vazquez, “Optimal scheduling of electric vehicle charging and vehicle-to-grid services at household level
including battery degradation and price uncertainty,” IET Generation, Transmission Distribution, vol. 8, no. 6, pp. 1007–
1016, Jun. 2014.
H. Farzin, M. Fotuhi-Firuzabad, and M. Moeini-Aghtaie, “A
Practical Scheme to Involve Degradation Cost of Lithium-Ion
Batteries in Vehicle-to-Grid Applications,” IEEE Transactions
on Sustainable Energy, vol. 7, no. 4, pp. 1730–1738, Oct.
2016.
M. R. Ahmad, I. Musirin, M. M. Othman, and N. A. Rahmat,
“Phev charging strategy via user preferences and its impacts
on power system network,” in 2014 IEEE Conference on
Energy Conversion (CENCON), Oct. 2014, pp. 19–24.
C. Liu, K. T. Chau, D. Wu, and S. Gao, “Opportunities
and Challenges of Vehicle-to-Home, Vehicle-to-Vehicle, and
Vehicle-to-Grid Technologies,” Proceedings of the IEEE, vol.
101, no. 11, pp. 2409–2427, Nov. 2013.
S. Shafiee, M. Fotuhi-Firuzabad, and M. Rastegar, “Investigating the Impacts of Plug-in Hybrid Electric Vehicles on Power
Distribution Systems,” IEEE Transactions on Smart Grid, vol.
4, no. 3, pp. 1351–1360, Sep. 2013.
N. S. M. Nazar, M. P. Abdullah, M. Y. Hassan, and F. Hussin,
“Time-based electricity pricing for Demand Response implementation in monopolized electricity market,” in 2012 IEEE
Student Conference on Research and Development (SCOReD),
Dec. 2012, pp. 178–181.
S. Peterson, J.Apt, and J. F. Whitacre, “Lithium-ion battery
cell degradation resulting from realistic vehicle and vehicleto-grid utilization,” Journal of Power Sources, vol. 195, no.
8, pp. 2385–2392, 2010.
S. Bashash, S.J.Moura, and H. J.C. Forman, “Plug-in hybrid
electric vehicle charge pattern optimization for energy cost
and battery longevity,” Journal of Power Sources, vol. 196,
no. 1, pp. 541–549, 2011.
245
Authorized licensed use limited to: Carleton University. Downloaded on November 07,2020 at 14:08:15 UTC from IEEE Xplore. Restrictions apply.