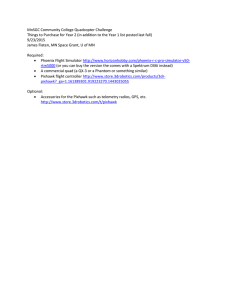
Flight Test Results of UAS Collision Detection & Avoidance System Using ADS-B Sensors Subodh Bhandari1, Aziz Ahmad2, Zhijun Chen3, California State Polytechnic University, Pomona, CA 91768 This paper presents the preliminary flight test results of a collision avoidance system developed for a fixed-wing unmanned aerial system (UAS) and a quadrotor using ADS-B transponders. The system uses an onboard flight computer to process the information of the vehicles from the ADS-B transponders and send navigation commands to an open source Pixhawk autopilot to perform avoidance maneuvers. Initial results from both the ground and flight test are presented in this paper. I. Introduction T HE utilization of small unmanned aerial systems (UASs) for civilian applications has seen rapid growth during the past decade and new research continues to show their potential applications in a wide variety of areas. Many of these applications require navigation through controlled airspace and obstacle rich environments. This poses major challenges both from technical and regulatory stand points. Early collision detection and swift avoidance is one of the primary technical challenges that coexisting UAVs are currently facing. Automatic Dependent Surveillance-Broadcast (ADS-B) transponders can be used to determine the position, orientation, velocity, and other relevant information of similarly equipped aircraft in the same airspace. As of January 2020, the primary civil aviation regulatory body of the United States government, the Federal Aviation Administration (FAA) has mandated all aircraft operating in class A,B and C airspace to be equipped with ADS-B out avionics. Use of ADS-B transponders would allow UASs to be easily integrated into the existing airspace without major infrastructure modifications. This paper presents a system involving a fixed wing UAV and a quadcopter that will autonomously detect and avoid midflight collision through the use of ADS-B transponders. A flight test and multiple ground tests were performed to show the capabilities of the system. Prediction and avoidance algorithms were both developed in C++. II. UAS Platforms The vehicles used in this project are a fixed wing E-flight Carbon Z Cub and a F450 ARF quadcopter as shown in Fig. 1. The Carbon Z Cub has a wingspan of 84.6 inches, and has a maximum gross weight of 12 pounds. The F450 ARF has a maximum gross weight of 3.5 pounds. The primary control surfaces of the Carbon Z Cub include ailerons, flaps, elevator, and rudder. The quadcopter has 4 (24x 12.7 cm) propeller blades and a maximum takeoff weight of ~1600 g. 1 Professor, Aerospace Engineering Department, 3801 West Temple Ave. Pomona, CA 91768. 17-2116, and AIAA Associate Fellow. 2 Senior Undergraduate Student, Aerospace Engineering Department, 3801 West Temple Ave, Pomona CA, 91768. 3 Garduate Student, Computer Engineering Department, 3801 West Temple Ave, Pomona CA, 91768. 1 American Institute of Aeronautics and Astronautics AIAA Fig. 1 Carbon Z Cub fixed-wing UAV (left) and F450 ARF quadcopter. III. Avionics System The avionics system onboard the UAVs include a flight control system and a companion flight computer. The flight control system used in both the vehicles is an open source Pixhawk autopilot, which is shown in Fig. 2 along with the flight computer. Fig. 2 Pixhawk flight controller (left) and onboard mini computer (right). The Pixhawk autopilot uses waypoint navigation to perform a predetermined mission with the capability to loiter. The flight computer reads the GPS position of the controlled aircraft directly from the Pixhawk through message packets using MAVLink protocol. The GPS locations of the other aircraft are received by the ADS-B transponder and sent to the Pixhawk autopilot, which then sends the data to the companion computer. After location data for both the vehicles is stored, the companion computer starts calculating for a change of course maneuver using kinematic equations. Once an avoidance maneuver is requested, the new waypoint is sent to the Pixhawk autopilot, which maneuvers the aircraft to a collision free path. Fig. 3 provides a summary of the avionics system architecture. ADS-B Transponder (Ping 2020) Pixhawk Autopilot Onboard Flight Computer (Linux OS) Fig. 3 Avionics system for collision avoidance system. 2 American Institute of Aeronautics and Astronautics AIAA IV. ADS-B Transponder and Implementation The transponders used in this research are Ping 2020 ADS-B, which broadcast identity, position, speed of aircraft, and heading. This allows the Air Traffic Control (ATC) and other similarly equipped aircraft to accurately determine the senor’s location without going through a radar system. The ADS-B uses GPS signal and barometric pressure to form an accurate position and velocity that is transmitted continually. A significant benefit of using the ADS-B is that it broadcasts data every second. Along with the Ping 2020 ADS-B transceiver, a uAvionix FYXnav-B GPS and barometric sensor are used. The barometric sensor has an altitude reading accuracy up to 10cm. The sensors integrate seamlessly with the Pixhawk autopilot and transfer the data without any custom code. Fig. 4 shows a schematic integrating the ADS-B Transceiver, FYXnav-B GPS, and Pixhawk 4.0 autopilot. Fig. 4 Integration of ADS-B transponder system (left) with Pixhawk autopilot. V. Collision Avoidance Algorithm The algorithm developed to utilize the ADS-B transponder takes into account the GPS location history of the intruder UAS to perform an avoidance maneuver through a three step process. First, the information of the intruder aircraft is stored within the computer. Using MAVLink messages, an updated position is read from the Pixhawk for both the ownship and the intruder UAS. The velocity and acceleration of the UAS are derived from these positions and the timestamp sent with the GPS positions. Second, the trajectory of each aircraft is predicted from the state information derived in the first part. The system uses the equations of a circular motion to predict the motion of the aircraft into the future. The state vector defines a circular path into the future. Because the actual trajectory of the aircraft is unpredictable, a safety bubble is added around the predicted trajectory to account for any variance in the aircraft trajectory as shown in Fig. 5. If the future predicted positions of the aircraft are ever within the safety bubble (150 meters), a collision is deemed imminent and the algorithm progresses into the next step. In the third step, the optimal prediction maneuver is chosen from a list of four types of maneuvers. Based on the relative heading of the intruder aircraft, the ownship will generate a waypoint that is away from the intruder aircraft. Once the optimal path is found, the waypoint is sent to the Pixhawk autopilot, which executes a collision-free navigation of the ownship. VI. Ground and Flight Test Results The collision detection and avoidance algorithm was tested in several ground and flight tests. These tests show the capability of the system to detect and avoid other aircraft. Initial ground tests involved stationary obstacles and progressed to moving obstacles. Figure 6 shows the results from the initial flight test at a speed of 3 MPh, which is significantly slower than what the aircraft can achieve. 3 American Institute of Aeronautics and Astronautics AIAA Fig. 6 UAV trajectory during collision avoidance maneuver. The purple line shows a predicted path generated by the onboard flight computer which the ownship would follow to change course after employing the mechanisms discussed in section V. Additionally, results of a flight test are graphed in Fig.7 with more pictorial detail. Fig.7 Multiple paths predicted (shown in various colors) vs the Actual path (solid blue) 4 American Institute of Aeronautics and Astronautics AIAA As discussed in section V, the fixed wing aircraft flies with a safety bubble of 150 meters in memory and is actively looking for oncoming traffic within said radius. The bubble has been set to encapsulate an area this large in order to account for GPS latency particularly during undesirable weather conditions. In fig.7, the start and end points of the flight are shown along with the actual and predicted paths. The dashed circle highlights an area of 150 m radius where the ownship is capable of detecting and predicting a collision and hence will try to avoid that immediately upon detection. In this test, the intruder vehicle was operated within the collision zone at velocities of no higher 3 mph. The ownship aircraft flying at roughly 25 mph successfully detected presence of the intruder and initiated an avoidance maneuver. Shown by the solid blue line in the figure is the actual path flown by the aircraft while the asterisked lines in various colors show the points of collision detection and prediction. It can be observed that the computer generated several prediction paths and eventually took a U-turn to avoid collision to head towards a loiter phase where it would generate a new waypoint outside of the collision zone. The loiter zone is the circular blue path in the top left corner. Additionally, it is worth mentioning that the aircraft took a rather tight U-turn, largely due to high cross winds averaging 20 Mph at the time of flight. Similarly the loitering happened in nearly perfect circle but once again due to the effects of the wind and high GPS noise, the graph culminated in a less than perfect circular shape. These tests results will be followed by more testing whose findings will be presented in the final draft of the paper by the end of the year. Acknowledgments The authors would like to acknowledge the support from Lockheed Martin Corporation that made this research possible. The authors would also like to acknowledge contribution made by other students at California State Polytechnic University to this project. Bibliography [1] Kwang-Yeon Kim, et al. “UAV Collision Avoidance Using Probabilistic Method in 3-D.” 2007 International Conference on Control, Automation and Systems, 2007, pp. 826–829. [2] Schaeffer, R., “A Standards-Based Approach to Sense-and-Avoid Technology,” AIAA 3rd Unmanned Unlimited Technical Conference, Workshop and Exhibit, September, 2004. [3] Geyer, C., Singh, S., and, Chamerlain, L., “Avoiding Collisions between Aircraft: State of the Art and Requirements for UAVs operating in Civilian Airspace”, Tech. Report, CMU-RI-TR-08-03, Robotics Institute, Carnegie Mellon University, March, 2008. [4] Sense-and-Avoid Equivalent Level of Safety Definition for Unmanned Aircraft Systems”, NASA Dryden Flight Research Center, Rev9, 2005. [5] Sherman, T., Elemy, T., Bhandari, S., et al., “Collision Avoidance System for Fixed-Wing UAVs using Ping-2020 ADS-B Transceivers,” Proceedings of AIAA 2019 SciTech Forum, San Diego, CA, 7-11 January 2019. 5 American Institute of Aeronautics and Astronautics AIAA