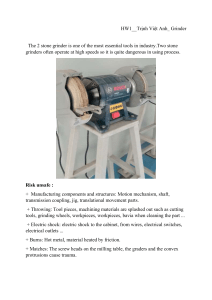
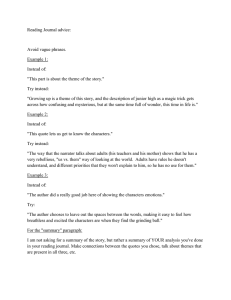
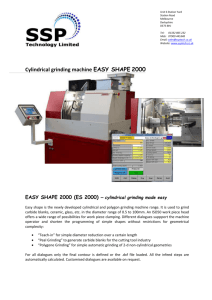
Journal of Manufacturing Processes 50 (2020) 520–527 Contents lists available at ScienceDirect Journal of Manufacturing Processes journal homepage: www.elsevier.com/locate/manpro Mechanism study on ultrasonic vibration assisted face grinding of Hard and brittle materials T Xiaofeng Zhanga, Lin Yanga, Yan Wangb,*, Bin Lina, Yinghuai Dongb, Chang Shib a b Key Laboratory of Advanced Ceramics and Machining Technology, Ministry of Education, Tianjin University, China Tianjin University of Science and Technology, Tianjin, China ARTICLE INFO ABSTRACT Keywords: UAFG Surface generating Grinding force modeling Surface Morphology Vibration Amplitude Ultrasonic vibration assisted face grinding (UAFG) has excellent performance in hard and brittle materials processing. In order to reveal the surface generating mechanism and improve the machining quality, this study was dealing with investigation on ultrasonic energy distribution and surface generating characteristics. Based on the modeling of grinding force, surface generation and material removal volume, the grinding mechanism of UAFG is analyzed and presented in detail. The surface generating process is described by grain trajectory interference and overlap, and the grinding force model is established based on fracture mechanics of brittle materials. According to the mathematical modeling, an innovation for surface adjustment and grinding force calculation in UAFG is proposed. Depend on the theoretical study, the combined effect of ultrasonic vibration and processing parameters on grinding force and surface micro structure in UAFG is reported. The surface characteristics can be designed and simulated by process parameter optimization; high performance surface can be achieved due to the theoretical calculation. The correctness of the theoretical derivation is verified by numerical calculation and comparative experiments. This investigation can be used as a basic principle for machining surface improvement and processing technology modification in UAFG. 1. Introduction Engineering ceramics, optical glasses, semiconductor and other hard and brittle materials are difficult to machine due to their high stiffness and low thermal expansion coefficient, which are widely applied in high technology fields such as aerospace, national defense and electronics [1]. Therefore, Ultrasonic machining is particularly important for nonconductive and brittle materials processing [2]. Xiao put forward an innovation for the cutting force modeling of ultrasonic vibration assisted side grinding of ceramic [3]. Jiang presented ultrasonic vibration assisted grinding (UAG) is one of the impactful machining methods for processing hard and brittle materials [4].Sun introduced that ultrasonic energy intervention can reduce cutting force, improve material removal rate and machining quality [5]. Ali showed that the grinding force and surface roughness are significantly lower after ultrasonic treatment [6]. Agarwal developed a novel surface roughness analysis model based on the randomness of grinding process [7]. Uhimann reported that no thermal burns and physical and chemical changes were found in the workpiece in UAG [8]. Moreover, Wang pointed out that lower scallop height on workpiece surface and smaller grinding force can be obtained in UAG due to the system matching ⁎ mechanism [9]. Wang pointed out the surface machining quality and the grinding force can be modified by ultrasonic vibration parameters selection [10]. For functional surface processing, Wang obtained surface roughness reduction and better surface integrity [11]. Ding designed surface microstructure and surface morphology by regulating the grain trajectory [12]. Gong found that UAG has less tool wear than common grinding under the same conditions [13]. Most importantly, Rabiei showed that UAG features high machining performance and long cutting tool life, which can return high economic efficiency [14]. Current research has focused on process parameter optimization during machining experiments regarding ultrasonic machining, but theoretical studies on material removal mechanism and surface generation in UAFG are less reported. The purpose of this investigation is to clarify the surface generation mechanism in UAFG and indicate the grinding force variation affected by ultrasonic vibration parameters. The experimental device is illustrated in detail and the results analysis is carefully executed in this study. Theoretical calculation followed by mathematical modeling is implemented and shows good correlation with the experimental data, the effects of ultrasonic vibration on common face grinding for brittle material are comprehensive investigated. According to the study, the surface morphology can be Corresponding author at: No. 1038 Dagu Nanlu, Hexi District, Tianjin, P.R. China. E-mail addresses: xijiyu82@163.com (X. Zhang), satansdestiny@163.com (Y. Wang). https://doi.org/10.1016/j.jmapro.2020.01.003 Received 11 September 2019; Received in revised form 26 November 2019; Accepted 3 January 2020 1526-6125/ © 2020 The Society of Manufacturing Engineers. Published by Elsevier Ltd. All rights reserved. Journal of Manufacturing Processes 50 (2020) 520–527 X. Zhang, et al. Fig. 1. The motion model of ultrasonic vibration assisted face grinding. predicated and regulated by the theoretical deduction. The surface microstructure can be improved due to the grinding force control. 2. Model development As shown in Fig. 1, three kinds of grain motions (grinding tool feeding motion, ultrasonic vibration and grinding tool rotation) were simultaneously appeared in the UAFG process. The following assumptions were carried out for the object of research [15]: (1) The grains are evenly distributed on the surface of the grinding tool; (2) Ultrasonic vibration maintains a stable state during the grinding processing; (3) The grains are rigid spheres of the same size, and their shapes remain unchanged during the grinding process; (4) The grains will not detach from the grinding tool during the grinding processing. Fig. 3. The indentation process of abrasive grain. 2.2. Surface generating mechanism modeling As Fig. 3 shows, the grinding wheel continuously knocks on the surface as a result of ultrasonic vibration effects. Cracks are generated when the diamond grains are pressed into the surface of the workpiece. The crack size can be obtained by simplifying the grains into Vickers indenter [16]: Transverse crack length: 2.1. Single grain trajectory modeling Cl = 1• The single abrasive grain trajectory model can be obtained according to kinematics analysis of UAG: x = R cos( t ) + vw t z = A cos(2 ft + 0) 3 4 (4) Transverse crack depth: (1) Ch = (2) y = R sin( t ) Pm KIc 2• Pm Hv 1 2 (5) Where Cl istransverse crack length, Ch is transverse crack depth, HV is material hardness, KIc is plane strain fracture toughness, ζ1 and ζ2are proportionality coefficients, Pmis single grain contact force. Fig.4 shows the transverse cracks interference which is generated by the same diamond grain in adjacent vibration periods. The relations between ultrasonic frequency, transverse cracks length and rotation speed in critical state can be illustrated as following equations: (3) Where ω is grinding wheel angular velocity, vw is feed rate, f is ultrasonic frequency, R is grinding wheel radius, t is time, 0 is vibration initial phase, A is vibration amplitude. The single grain trajectory can be painted as Fig. 2 shown. Fig. 2. Grain trajectory in two rotation periods of grinding wheel. 521 Journal of Manufacturing Processes 50 (2020) 520–527 X. Zhang, et al. Fig. 4. Critical state of single grain trajectory self-overlapping in Y direction. Fig. 6. Grain trajectory self-overlapping in both X, Y direction. Fig. 5. Critical state of adjacent trajectory self-overlapping in X direction. T= 2Cl R 1 T= f (6) Fig. 7. Effective contact time of abrasive particles in a single ultrasonic vibration cycle. (7) between diamond grain and the surface of the workpiece, the effective contact time Δt is explained in Fig.7, following equation can be obtained: Fig.5 shows the transverse cracks interference which is generated by the same diamond grain in adjacent rotation periods. The relations between rotation speed, transverse cracks length and feed rate can be illustrated as following equations: 2 2Cl = vw t = 2(t1 2R 2 vw 1 cos f 1 1 A (10) Where t1 and t2are the time in different phase, δ is grain pressed depth. According to the Hertz contact theory proposed by Timoshenko and Goodier [17], maximum contact force of single grain Pm can be expressed as: (8) Substitute (6) and (7) into (8),the critical relationship between ultrasonic vibration frequency and grinding parameters can be found: f= t2) = (9) Pm = In Eq. (9), the ultrasonic vibration frequency has a critical state for cracks interference. The grinding force, MMR and surface generation accuracy can be adjusted due to the ultrasonic parameters control. The surface generation process can be described in following figure: As Fig.6 shows, the ground surface is generated by cracks interference both in X, Y direction, the surface generation accuracy is decided by interference degree, and the surface microstructure can be predicted and designed due to the grain trajectory planning. 8 E 9 1 v2 2 d 3 1 2 (11) Where E is Young's modulus of the workpiece material, v is Poisson's ratio of the workpiece, d is the diameter of the grain. Single grain movement is consisting by the grinding wheel feed and the rotation, but in actual machining process, the machine tool feeding speed much smaller than the spindle rotation speed. For simplicity, this study assumes that the trajectory of single grain is only determined by the spindle rotation, the single grain trajectory can be defined as: L = t• •r 2.3. Grinding force modeling (12) Where r is the distance from abrasive grain center to the grinding wheel center. As a result of the average distribution of diamond abrasive grains on the end surface of the grinding wheel, different diamond grains have different radius relative to the center of the grinding wheel. As Fig.8 shows, the abrasive grain trajectory on the1/2 radius of grinding wheel is selected to substitute all diamond grains trajectory on the whole end surface. The single grain trajectory can be expressed as: The grinding force is greatly influenced by processing parameters and it has a significant relationship to the ground surface quality. Although the feeding directional grinding force contributes to the material removal rate, the normal grinding force is the mainly factor for the cracks formation and growth. The machined surface is generated by the cracks interweaved when grains are pressed into the workpiece surface. Therefore, normal grinding force is studied in this investigation. Within each vibration period, there is an effective contact time L = t• 522 R 2 (13) Journal of Manufacturing Processes 50 (2020) 520–527 X. Zhang, et al. Fig. 10. Electroplating diamond grinding tool. Fig. 8. Grain distribution on the end surface of the grinding wheel. Table 1 Si3N4 property parameters and grinding parameters. Parameters Mark Value Fracture toughness Vickers hardness Elasticity modulus Poisson's ratio Crack ratio Diamond grain diameter KIc Hv E 5Mpa·m1/2 18GPa 320GPa 0.25 0.24 100μm d Fig. 11. The end face of grinding tool (a) Test 1 (b) Test 3 (c) Test 5 (d) Test 13. Table 3 Experimental parameters. Fig. 9. The experiment setting. Table 2 Experimental conditions. Types Contents Machining Center Ultrasonic generator Abrasive tools CNC-650 YC-UGSL11A Electroplating diamond grinding tool 150 Grain number through the dynamic grinding area in unit time Tool diameter Dynamometer Vibration frequency Diamond grain diameter Spindle speed(r/ min) Feed rate (mm/ min) Vibration frequency (Hz) Vibration amplitude (μm) Grinding depth(mm) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1500 2000 2500 3000 3500 2500 2500 2500 2500 2500 2500 2500 2500 2500 2500 120 120 120 120 120 180 240 300 120 120 120 120 120 120 120 26500 26500 26500 26500 26500 26500 26500 26500 26500 26500 26500 26500 26500 26500 26500 3 3 3 3 3 3 3 3 3 3 3 5 5 5 5 0.02 0.02 0.02 0.02 0.02 0.02 0.02 0.02 0.01 0.03 0.04 0.01 0.02 0.03 0.04 (15) Ww = Nds•2Cl Ch•L• t•f Macroscopic material removal volume in unit time can be obtained: 3.5mm YDC-III09 26500 Hz 100μm Wh = vw•2R• (16) P Where p is grinding depth. If let Wh = Ww and simultaneous Eqs. (4), (5),(11),(13),(15) and (16), the following equation can be obtained: Simultaneous Eqs. (4),(5) and (13), single grain material removal volume can be obtained: Ww = 2Cl Ch•L Serial number = (14) Assume the grain number through the dynamic grinding area in unit time is Nds, whole microscopic material removal volume in unit time can be obtained: Nds• 1 2 2 8 15 • vw• • 8 15 3 1 4 2 p•K Ic •Hv • 8 9 ( 1 )d 2 E v2 5 8 • cos 1 1 8 15 A (17) If substitute (17) into (11), the following equation can be obtained: 523 Journal of Manufacturing Processes 50 (2020) 520–527 X. Zhang, et al. Fig. 12. Surface morphology measured by the White Light Interferometer (a) Test 1 (b) Test 3 (c) Test 5 (d) Test 13. 3 8 15 Pm = 2 8 E d 9 1 v2 Nds• 1 2 2 8 15 • 3 1 v w• p•KIc4 •Hv2 • • 8 9 ( )d 2 E 1 v2 5 8 • cos 1 1 1 2 F= 1 Nds cos 1 1 8 15 A A 2 8 E d 9 1 v2 Nds• 1 2 2 8 15 Pm dt Pm t (19) ( )d 2 E 1 v2 • cos 1 1 8 15 A 3. Experimental validation The Si3N4 ceramic is employed in the experimental validation. Si3N4 property parameters are shown in Table 1. The inner diameter and outer diameter of the workpiece are 40 mm and 55 mm respectively. The experiment setting can be seen in following Fig. 9. Grinding experiments are presented by a CNC-650 Machining Center assisted with YC-UGSL11A ultrasonic generator. The grinding force in vertical direction is measured by YDC-III09Dynamometer. The experimental conditions are shown in Table 2. The grinding tool and its end surface topography are illustrated in Figs. 10 and 11. The lower spindle speed and grinding depth is used in the experiments to avoid tool damage. The detail of experimental parameters setting is listed in Table 3. (20) Where F is the grinding force. If simultaneous Eq.s (19) and (20), the following equation can be obtained: F = Pm Nds f t 8 9 5 8 Eq. (22) shows that grinding force is related to many parameters including ultrasonic frequency and amplitude, the changing trend of grinding force can be obtained by the mathematic formula and the surface generation can be improved due to the grinding force control. The impulse can also be expressed by the grinding force in single vibration cycle: F I= Nds f 1 v w• p•K Ic4 •Hv2 • 1 2 (22) Due to the conservation law of impulse, the impulse of single grain in a single vibration cycle can be obtained: I= 3 • • (18) cycle 3 8 15 (21) If substitute (10) and (18) into (21), the grinding force can be obtained: 524 Journal of Manufacturing Processes 50 (2020) 520–527 X. Zhang, et al. Fig. 13. Surface morphology measured by the SEM (a) Tests 1, 3 and 5 (b) Tests 3 and 13. Fig. 14. Surface roughness measured by the profilometer. 525 Journal of Manufacturing Processes 50 (2020) 520–527 X. Zhang, et al. contributes to the improvement of surface roughness. 4.2. Grinding force analysis The grinding process can be divided into five stages: 1.The grinding tool has not entered the machining surface; 2.The grinding tool has not completely entered the machining surface; 3.The grinding tool has completely entered the machining surface; 4.The grinding tool has not completely left the machining surface; 5.The grinding tool has completely left the machining surface. The five stages can be seen in Fig. 15. The grinding force measured by the dynamometer in the grinding process is shown in Fig. 16. Obviously, the grinding force is zero in stages 1 and 5. Stages 2 and 4 are the time periods when grinding force rapidly increasing and decreasing. In comparison, the grinding force is relatively stable when the grinding tool has completely entered the machining surface (stage 3). According to Eq. (22), F (the grinding force) is proportional to Nds (the grain number through the dynamic grinding area in unit time), and Nds is basically constant in stage 3. However, Nds increases and decreases in stages2 and 4 respectively. For accuracy and simplicity, the average value of the grinding force in stage 3 is used as the experimental data for the following analysis. The comparison between experimental data and theoretical calculation results is shown in Fig. 17. According to Fig. 17, both high spindle speed and high vibration amplitude can effectively reduce the grinding force. Nevertheless, the grinding force increases as feed rate or grinding depth increases. It is interesting to find that the theoretical calculation shows good correlation with the experimental data. The results show the feasibility and effectiveness of the mathematical model to predict the grinding force in UAFG. The slight deviation between experimental data and theoretical calculation results may be caused by the uneven distribution of the grains on the surface of the grinding tool, the different sizes and shapes of the grains, the detachment of the grains from the grinding tool or the unstable condition of ultrasonic vibration during the grinding process. Fig. 15. The five stages in the grinding process. Fig. 16. The change of grinding force during the grinding process (a) (b) (c). 4. Results and discussions 4.1. Surface morphology analysis The machined surface morphology is obtained by a Contour GT-K White Light Interferometer and a Phenom XL Scanning Electron Microscope (SEM). Fig. 12(a)(b)(c) and Fig. 13(a)(b)(c) show the machined surface morphology at different spindle speeds (1500 r/min, 2500 r/min and 3500 r/min). It is interesting to note that the machined surface is smoother and the distance between grooves is smaller (97.2 μm, 52 μm and 33.3 μm) as the spindle speed increases. The results indicated that the grain trajectory is more compact and the material is removed more evenly at a higher spindle speed, which can generate higher quality surface. Fig. 12(b)(d) and Fig. 13(b)(d) show the machined surface morphology at different vibration amplitudes (3 μm and 5 μm). It is found that the height difference between the wave peaks and troughs on the surface is effectively reduced as the vibration amplitude increases, but some pits are formed at the same time. It is reasonable to infer that the material removal rate is improved and the surface wave peak is easier to be removed due to the increase of ultrasonic energy. However, excessive ultrasonic energy causes material breakage easily, which resulted some pits are formed. The surface roughness is measured by a NANOVEA ST400 Profilometer and the results are shown in Fig. 14. The results presented in Fig. 14(a) shown that the surface roughness is effectively reduced as the spindle speed increases. According to Fig. 14(b), it can be inferred that the enhancement of ultrasonic energy 5. Conclusions 1. The mathematical model of grinding force is derived from the grain trajectory interference and overlap and the fracture mechanics of brittle materials. 2. The contrast experimental results showed the feasibility and effectiveness of the mathematical model to predict the grinding force in UAFG. 3. With the increase of grinding depth and feed speed, the material removal rate and grinding force increased. The grinding force could be effectively reduced by increasing spindle speed and vibration amplitude. Meanwhile, high quality surface could be generated by increasing the spindle speed and vibration amplitude appropriately. Furthermore, some pits are formed on the machining surface by excessive vibration amplitude, which reduced the surface quality. 4. The grinding force is significantly reduced due to the ultrasonic vibration energy interference. The surface roughness can be further regulated by ultrasonic vibration parameters modification. Declaration of Competing Interest The authors declared that they have no conflicts of interest to this work. 526 Journal of Manufacturing Processes 50 (2020) 520–527 X. Zhang, et al. Fig. 17. The comparison between experimental data and theoretical calculation when some parameters changing: (a) spindle speed; (b) feed rate; (c) grinding depth and vibration amplitude. Acknowledgement Tools Manuf 2015;90:16–28. [7] Uhimann. Surface formation in creep feed grinding of Advanced Ceramics with and without Ultrasonic Assistance. Annals of the CIRP 1998;470(1):249–52. [8] Wang Y, Lin B, Zhang XF. Research on the system matching model in Ultrasonic Vibration Assisted grinding. Int J Adv Manuf Technol 2014;70:449–58. [9] Wang Y, Lin B, Wang SL, Cao XX. Study on the system matching of ultrasonic vibration assisted grinding for hard and brittle materials processing. Int J Mach Tools Manuf 2014;77:66–73. [10] Wang Y, Sarin VK, Lin B, Li H, Gillard S. Feasibility study of the ultrasonic vibration filing of carbon fiber reinforced silicon carbide composites. Int J Mach Tools Manuf 2016;101:10–7. [11] Guo B, Zhao Q. Ultrasonic vibration assisted grinding of hard and brittle linear micro-structured surfaces. Precis Eng 2017;48:98–106. [12] Ding K, Fu YC, Su HH, Cui FF, Li QL. Study on surface/subsurface breakage in ultrasonic assistedgrinding of C/SiC composites. Int J Adv Manuf Technol 2017;91:3095–105. [13] Gong H, Fang FZ, Hu XT. Kinematic view of tool life in rotary ultrasonic side milling of hard brittle materials. Int J Mach Tools Manuf 2010;50(3):303–7. [14] Rabiei F, Rahim AR, Hadad MJ, Saberi A. Experimental evaluation of coolant-lubricant propertiesof nanofluids in ultrasonic assistant MQL grinding. Int J Adv Manuf Technol 2017;93:3935–53. [15] Wang Y, Fu ZQ, Dong YH, Liu SG, Lu SQ. Research on surface generating model in ultrasonic vibration-assisted grinding. Int J Adv Manuf Technol 2018;912(96):3429–36. [16] Lawn BR, Marshall DB, Evans AG. Elastic/plastic indentation damage in ceramics: the median/radial crack system. J Am Ceram Soc 1980;63:574–81. [17] Timoshenko S, Goodier JN. Theory of elasticity. New York: McGraw-Hill; 1970. The authors wish to thank the Tianjin natural science foundation (Grant No.18JCQNJC05200), Scientific research project of Tianjin education commission (Grant No.2018KJ116) and Tianjin natural science foundation (Grant No.18JCYBJC88900). References [1] Thoe TB, Aspinwall DK, Wise ML. Review on ultrasonic machining. Int J Mach Tools Manuf 1998;38(4):239–55. [2] Xiao XZ, Zheng K, Liao WH, Meng H. Study on cutting force model in ultrasonic vibration assisted side grinding of zirconia ceramics. Int J Mach Tools Manuf 2016;104:58–67. [3] Wang JJ, Zhang JF, Feng PF, Guo P. Damage formation and suppression in rotary ultrasonic machining of hard and brittle materials: a critical review. Ceram Int 2017;44(2):1227–39. [4] Jiang C, Wang CH, Li HL. Experimental investigation of brittle material removal fraction on an optical glass surface during ultrasound-assisted grinding. Int J Adv Manuf Technol 2016;86:419–26. [5] Sun GY, Zhao LL, Ma Z, Zhao QL. Force prediction model considering material removal mechanism for axial ultrasonic vibration-assisted peripheral grinding of Zerodur. Int J Adv Manuf Technol 2018;98:2775–89. [6] Ali Z, Taghi T, Javad A. Energy aspects and workpiece surface characteristics in ultrasonic-assisted cylindrical grinding of alumina–zirconia ceramics. Int J Mach 527