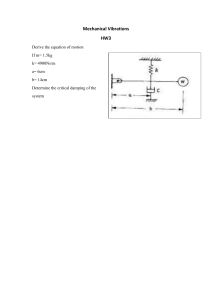
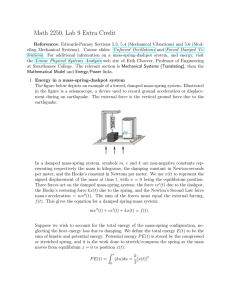
|Math 213-Spring 2021|Sec 4.9|Page 1 Section 4.9: A Closer Look at Free Mechanical Vibrations What will I learn in this Section? On completion of this chapter, students should be able to: • Understand the use of differential equations in modelling engineering systems. • Use second order linear equations with constant coefficients to model free mechanical vibrations. Many different physical systems can be described by a linear second-order differential equation 𝑑2𝑦 𝑑𝑦 𝑎 2 +𝑏 + 𝑐𝑦 = 𝑓(𝑡). 𝑑𝑡 𝑑𝑡 In this section, we give an application of this differential equation to Free Mechanical Vibrations. |Math 213-Spring 2021|Sec 4.9|Page 2 Mass-Spring Oscillator A damped mass-spring oscillator consists of a mass 𝑚 attached to a spring fixed at one end, as shown in the figure: Devise a differential equation that governs the motion of this oscillator, taking into account the forces acting on it due to the spring elasticity, damping friction, and possible external influences. In this section we analyze the motion of the above mass-spring system. The governing equation is 𝑑2𝑦 𝑑𝑦 [inertia] 2 + [damping] + [stiffness]𝑦 = 𝐹𝑒𝑥𝑡 𝑑𝑡 𝑑𝑡 i.e., 𝑑2𝑦 𝑑𝑦 𝑚 2 +𝑏 + 𝑘𝑦 = 𝐹𝑒𝑥𝑡 𝑑𝑡 𝑑𝑡 where • 𝑚 is the mass of the object (𝑚 > 0), • 𝑏 is the damping coefficient (𝑏 ≥ 0), • 𝑘 is the stiffness (𝑘 > 0), • 𝐹𝑒𝑥𝑡 is the external forces. Here, we will consider only the case 𝑭𝒆𝒙𝒕 = 𝟎 (free vibrations), i.e., we solve the homogeneous second order linear differential equation with constant coefficient 𝑑2𝑦 𝑑𝑦 𝑚 2 +𝑏 + 𝑘𝑦 = 0, 𝑑𝑡 𝑑𝑡 where 𝑚 > 0, 𝑏 ≥ 0, 𝑘 > 0, with the two initial conditions 𝑦(0) = 𝑦0 , 𝑦 ′ (0) = 𝑦1 where 𝑦(0) is the initial position and 𝑦 ′ (0) is the initial velocity of the mass. The auxiliary equation is 𝑚𝑟 2 + 𝑏𝑟 + 𝑘 = 0. and the two solutions of the auxiliary equations are: −𝑏 ± √Δ −𝑏 √Δ 𝑟1,2 = = ± 2𝑚 2𝑚 2𝑚 where Δ = 𝑏 2 − 4𝑚𝑘. |Math 213-Spring 2021|Sec 4.9|Page 3 Undamped Motion (𝒃 = 𝟎). When 𝑏 = 0, the vibrations is said to be undamped. In this discriminant Δ is given by Δ = −4𝑚𝑟 < 0 since 𝐿 > 0 and 𝐶 > 0. The two solutions of the auxiliary equation are −𝑏 √Δ √−4𝑚𝑘 𝑟1,2 = ± =± = ±𝑖√𝑘/𝑚, 2𝑚 2𝑚 2𝑚 i.e., 𝛼 = 0 and 𝛽 = √𝑘/𝑚. Then 𝑦(𝑡) = 𝑐1 cos(𝛽𝑡) + 𝑐1 sin(𝛽𝑡) Hence the electrical vibrations do not approach zero as 𝑡 increases without bound; the response of the circuit is simple harmonic. Damped Motion (𝒃 ≠ 𝟎). If 𝑏 ≠ 0, the motion is said to be damped. There will be three forms of the solution depending on the value of the discriminant Δ = 𝑏 2 − 4𝑚𝑘. We say that the motion is: 1) overdamped if Δ > 0, 2) critically damped if Δ = 0, 3) and underdamped if Δ < 0, Case I: Overdamped Motion (𝒃 ≠ 𝟎, 𝚫 > 𝟎) The two solutions of the auxiliary equation are 𝑏 𝑏 √Δ √Δ 𝑟1 = − + < 0, 𝑟2 = − − <0 2𝑚 2𝑚 2𝑚 2𝑚 and hence 𝑦(𝑡) = 𝑐1 𝑒 𝑟1𝑡 + 𝑐2 𝑒 𝑟2𝑡 It is clear that 𝑦(𝑡) → 0 as 𝑡 → ∞. |Math 213-Spring 2021|Sec 4.9|Page 4 Case II: Critically Damped Motion (𝒃 ≠ 𝟎, 𝚫 = 𝟎) The two solutions of the auxiliary equation are equal, i.e., −𝑏 𝑟1 = 𝑟2 = <0 2𝑚 and hence 𝑦(𝑡) = 𝑐1 𝑒 𝑟1𝑡 + 𝑐2 𝑡𝑒 𝑟1𝑡 = (𝑐1 + 𝑐2 𝑡)𝑒 𝑟1𝑡 Then, 𝑦(𝑡) → 0 as 𝑡 → ∞. As in the Case I, a nontrivial solution 𝑦(𝑡) can have at most one local maximum or minimum for 𝑡 > 0, so motion is nonoscillatory. Case III: Underdamped Motion (𝒃 ≠ 𝟎, 𝚫 < 𝟎) The two solutions of the auxiliary equation are −𝑏 √|Δ| −𝑏 √|Δ| 𝑟1 = +𝑖 , 𝑚2 = −𝑖 , 2𝑏 2𝑚 2𝑚 2𝑚 i.e., 𝛼 = −𝑏/(2𝑚) < 0 and 𝛽 = √|Δ|/(2𝑚). Then 𝑦(𝑡) = 𝑒 𝛼𝑡 (𝑐1 cos(𝛽𝑡) + 𝑐2 sin(𝛽𝑡)), and hence 𝑦(𝑡) → 0 as 𝑡 → ∞. |Math 213-Spring 2021|Sec 4.9|Page 5 Examples. A 1/4 kg mass is attached to a spring with stiffness 16 N/m. The mass is displaced 1 m to the right of the equilibrium point and given an outward velocity (to the right) of 2 m/sec. Neglecting any damping that may be present, determine the equation of motion of the mass. |Math 213-Spring 2021|Sec 4.9|Page 6 Examples. A 20 kg mass is attached to a spring with stiffness 200 N/m. the damping constant for the system is 140 N-sec/m. If the mass is pulled 0.25 m to the right of the equilibrium point and given an initial leftward velocity of 1 m/sec. When will it first return to its equilibrium position? |Math 213-Spring 2021|Sec 4.9|Page 7 Examples. A 1/4 kg mass is attached to a spring with a stiffness 4 N/m. The damping constant 𝑏 for the system is 1 N-sec/m. If the mass is displaced 1/2 m to the left and given an initial velocity of 1 m/sec to the left, find the equation of motion. |Math 213-Spring 2021|Sec 4.9|Page 8 Exercises (from the textbook) 1. A 3 kg mass is attached to a spring with stiffness 48 N/m. The mass is displaced 1/2 m to the left of the equilibrium point and given a velocity of 2 m/sec to the right. The damping force is negligible. Find the equation of motion of the mass. 2. A 1/8 kg mass is attached to a spring with stiffness 16 N/m. The damping constant for the system is 2 N-sec/m. If the mass is moved 3/4 m to the left of equilibrium and given an initial leftward velocity of 2 m/sec, determine the equation of motion. 3. A 2 kg mass is attached to a spring with stiffness 8 N/m. The damping constant for the system is 8 N-sec/m. If the mass is pulled 0.1 m to the right of equilibrium and given an initial rightward velocity of 2 m/sec, determine the equation of motion. 4. A 1 kg mass is attached to a spring with stiffness 4 N/m. The damping constant for the system is 5 N-sec/m. If the mass is moved 1 m to the left of equilibrium and released, determine the equation of motion.