UNIVERSIDAD DE CONCEPCIÓN
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA
543214-2– Sistemas lineales dinámicos
2021-1
Jose Rubén Espinoza Castro
Felipe Andrés Vargas Millalonco
Tarea 1
Jose Antonio Retamal Mora
Alejandro Gabriel Vargas Correa
Rafael Maximiliano Valeria Espinoza
Concepción, 22 de abril de 2021
Resumen
Este informe contiene las respuestas a las preguntas de la Tarea 1 del curso 543214-2, Sistemas
lineales dinámicos del Departamento de Ingeniería Eléctrica de la UdeC del semestre 2021-1. Las
simulaciones fueron realizadas en MatLab , Mathcad y MultiSim , por cada pregunta se incluye
una discusión de los resultados y finalmente se agrega una discusión final. Los resultados muestran
que un controlador de ganancia proporcional puede lograr los objetivos básicos del control como es
cero error en estado estacionario para entrada escalón. El controlador implementado en tiempo
discreto se ve deteriorado en su respuesta dinámica a causa del retardo por cálculo que en este caso es
de magnitud similar a las dinámicas del sistema.
iii
Tabla de Contenidos
NOMENCLATURA........................................................................................................................................................ IV
ABREVIACIONES ......................................................................................................................................................... VI
PARTE A) ........................................................................................................................................................................ 1
1.2.3.-
ENUNCIADO ......................................................................................................................................................... 1
SOLUCIÓN ............................................................................................................................................................ 1
DISCUSIÓN ........................................................................................................................................................... 2
PARTE B)......................................................................................................................................................................... 3
1.2.3.-
ENUNCIADO ......................................................................................................................................................... 3
SOLUCIÓN ............................................................................................................................................................ 3
DISCUSIÓN ........................................................................................................................................................... 5
PARTE C) ........................................................................................................................................................................ 6
1.2.3.-
ENUNCIADO ......................................................................................................................................................... 6
SOLUCIÓN ............................................................................................................................................................ 6
DISCUSIÓN ........................................................................................................................................................... 9
PARTE D) ...................................................................................................................................................................... 10
1.2.3.-
ENUNCIADO ....................................................................................................................................................... 10
SOLUCIÓN .......................................................................................................................................................... 10
DISCUSIÓN ......................................................................................................................................................... 11
PARTE E)....................................................................................................................................................................... 12
1.2.3.-
ENUNCIADO ....................................................................................................................................................... 12
SOLUCIÓN .......................................................................................................................................................... 12
DISCUSIÓN ......................................................................................................................................................... 16
PARTE F) ....................................................................................................................................................................... 17
1.2.3.-
ENUNCIADO ....................................................................................................................................................... 17
SOLUCIÓN .......................................................................................................................................................... 17
DISCUSIÓN ......................................................................................................................................................... 20
PARTE G) ...................................................................................................................................................................... 21
1.2.3.-
ENUNCIADO ....................................................................................................................................................... 21
SOLUCIÓN .......................................................................................................................................................... 21
DISCUSIÓN ......................................................................................................................................................... 23
PARTE H) ...................................................................................................................................................................... 24
1.2.3.-
ENUNCIADO ....................................................................................................................................................... 24
SOLUCIÓN .......................................................................................................................................................... 24
DISCUSIÓN ......................................................................................................................................................... 27
DISCUSIÓN FINAL ........................................................................................................................................................ 28
1.2.-
SUMARIO ........................................................................................................................................................... 28
DISCUSIÓN ......................................................................................................................................................... 28
BIBLIOGRAFÍA.............................................................................................................................................................. 29
ANEXO A.
1.2.-
LEYES IMPORTANTES ...................................................................................................................... 30
LEY DE OHM ...................................................................................................................................................... 30
LEYES DE KIRCHHOFF ........................................................................................................................................ 30
iv
Nomenclatura
Matrices
A
Tabc-0
𝐇(𝑠)
𝐇(𝑠)
L(s)
(t)
Adj{P}
diag{x1,…}
𝐗⃗
: matriz de parámetros de dimensión n·n.
: matriz de transformación de ejes abc a 0, dimensión 3·3.
: matriz de transferencia. 𝐇(𝑠) = 𝐂(𝑠𝐈 − 𝐀) 𝐁 + 𝐃.
: matriz de transferencia inversa. 𝐇(𝑠) = 𝐇 (𝑠).
: matriz de transferencia en L.D.
: matriz de transición.
: matriz adjunta de la matriz P.
: matriz diagonal compuesta por los valores x1, x2, ….
: matriz compuesta por elementos 𝑥⃗ , que son fasores.
Vectores
x
𝐱
xabc
xo
x
x(s)
vk
ck
bk
𝐱⃗
: vector de n variables de estados, x = [x1 x2 ··· xn]T
: vector de n variables de estados, 𝐱 = [𝑥 𝑥 ···𝑥 ]T (estimación de x).
: vector de tres variables de estados, xabc = [xa xb xc]T (ejes estacionarios abc).
: vector de estados en el punto de operación, xo = [x1o x2o ··· xno]T
: variación del vector de estados x en torno a xo, x = [x1 x2 ··· xn]T
: Laplace de x, x(s) = [x1(s) x2(s) ··· xn(s)]T
: k-ésimo vector propio de A.
: k-ésima fila de la matriz C.
: k-ésima columna de la matriz B.
: vector de fasores, 𝐱⃗ = [𝑥⃗ 𝑥⃗ ··· 𝑥⃗ ]T.
Escalares
xk
dxk/dt = 𝑥̇
ak
k
l(s)
hij(s)
rango{P(s)}
max{}
log{}
u(t)
r(t)
ts
V
f(t)
f(k)
f(s)
: k-ésima variable de estado.
: derivada de la k-ésima variable de estado.
: k-ésimo coeficiente del polinomio característico de A.
: k-ésimo valor propio de A.
: función de transferencia en L.D.
: elemento ij de la matriz H(s).
: rango de la matriz P(s).
: máximo valor.
: logaritmo en base 10.
: entrada escalón.
: entrada rampa.
: banda de asentamiento.
: tiempo de asentamiento.
: valor medio (RMS) de la señal continua (alterna) v(t).
: función en el tiempo continuo.
: función en el tiempo discreto (también escrita f(kT), con T el tiempo de muestreo).
: función en el plano de Laplace.
v
f()
f()
f(n)
f(m)
𝑥⃗
: función en frecuencia continua de tiempo continuo.
: función en frecuencia continua de tiempo discreta.
: función en frecuencia discreta de tiempo continuo.
: función en frecuencia discreta de tiempo discreta.
: fasor.
vi
Abreviaciones
Mayúsculas
L.A.
L.C.
L.D.
L.I.T.
S.P.I.
S.P.D.
F. de T.
B.W.
E.S.
S.S.
SISO
MIMO
L.G.R.
P.I.D.
S.P.
M.G.
M.F.
FCD
FCC
FCO
FCJ
T.L.
T.F.
T.F.F.D.
T.Z.
T.F.T.D.
T.F.D.
D. de B.
: lazo abierto.
: lazo cerrado.
: lazo directo.
: lineal invariante en el tiempo.
: semi-plano izquierdo.
: semi-plano derecho.
: función de transferencia.
: ancho de banda.
: entrada/salida.
: estado estacionario.
: sistema de una entrada y una salida (single input single output).
: sistema de varias entradas y varias salidas (multiple inputs multiple outputs).
: lugar geométrico de las raíces.
: controlador proporcional integral derivativo.
: sobrepaso.
: margen de ganancia.
: margen de fase.
: forma canónica diagonal.
: forma canónica controlable.
: forma canónica observable.
: forma canónica de Jordan.
: Transformada de Laplace.
: Transformada de Fourier.
: Transformada de Fourier de Frecuencia Discreta.
: Transformada Z.
: Transformada de Fourier de Tiempo Discreta.
: Transformada de Fourier Discreta.
: Diagrama de Bode
Minúsculas
c.i.
l.i.
l.d.
c.c.
c.a.
a.c.a.
: condiciones iniciales.
: linealmente independiente.
: linealmente dependiente.
: corriente continua (en Inglés es d.c.).
: corriente alterna (en Inglés es a.c.).
: abscisa de convergencia absoluta.
1
Parte a)
1.-
Enunciado
Determine las variables de estado 𝒙, de salida 𝒚, de entrada 𝒖, perturbaciones 𝒑 y parámetros.
Muestre un diagrama de bloques. Elabore en cuál es el mejor modelo para el panel solar.
2.-
Solución
Por temas de comodidad en el cálculo, lo más sencillo en un circuito RLC es tomar como
variables de estado los voltajes en los inductores y las corrientes en los condensadores. De esta manera
las variables de estado se obtienen como 𝑥 = 𝑖 , 𝑥 = 𝑖 , 𝑥 = 𝑣 , 𝑥 = 𝑣 , 𝑥 = 𝑣 . La
variable de entrada en el sistema es el switch (𝑢(𝑡) = 𝑆 (𝑡)) y la de salida es nuestra variable de
estado de interés, como se nos pide obtener la tensión de salida 𝑣 , esa es nuestra variable de salida
𝑦(𝑡). No existen perturbaciones y los parámetros asociados al modelo son los siguientes:
𝑅, 𝐶 , 𝐶 , 𝐿 , 𝐿 , 𝑖
,𝑣
,𝑘
con sus valores respectivos entregados por el enunciado.
El siguiente diagrama de bloques relaciona cada una de las variables con las demás según sus
relaciones físicas del circuito
Fig. 1.1 Diagrama de bloques del sistema
2
Con respecto al panel solar, se nos ofrece una ecuación que relaciona el voltaje 𝑣
corriente 𝑖
con la
de la siguiente forma:
( )
𝑖 (𝑡) = 𝑖
(1.1)
1−𝑒
Si tomamos en cuenta que, según el circuito, 𝑖
=𝑖
para todo caso tenemos que:
( )
𝑖 (𝑡) = 𝑖
⇒𝑣
=𝑘
1−𝑒
∙ ln 1 −
+𝑣
(1.2)
3.-
Discusión
1.-
No existen perturbaciones, pues en un principio se podría decir que 𝑣 es una perturbación,
sin embargo, 𝑣
es descrito por una expresión en la cual se ve involucrada la entrada IL1, por lo cual
no puede ser llamada perturbación.
2.-
Un buen diagrama de bloques es aquel en que se alcanzan a distinguir las variables de estado,
parámetros, entradas y salidas.
3
Parte b)
1.-
Enunciado
Obtener las ecuaciones de estado del sistema paralo cual asuma 𝑥 = 𝑖 , 𝑥 = 𝑖 ,
𝑥 = 𝑣 ,𝑥 = 𝑣
y en función de 𝑆 (𝑡), considerando que 𝑆 (𝑡) puede tomar el valor de 0 ó 1.
Dibuje un circuito equivalente.
2.-
Solución
Utilizaremos la ley de corrientes de Kirchhoff en los condensadores y la ley de voltajes de
Kirchhoff en las inductancias para ambos modelos (para el modelo con el switch en ON y en Off) por
separado, para el modelo en ON tenemos que:
El voltaje sobre la inductancia 𝐿 es el voltaje de entrada
𝐿
El voltaje sobre la inductancia 𝐿 es el voltaje en el condensador 𝐶
𝐿
(2.1)
=𝑣
(2.2)
=𝑣
La corriente que atraviesa el condensador 𝐶 es la corriente proporcionada por la
inductancia 𝐿
𝐶
(2.3)
= −𝑖
La corriente que atraviesa el condensador 𝐶 es el mismo que atraviesa la carga 𝑅
𝐶
(2.4)
=−
Para el modelo en OFF tenemos que:
El voltaje de entrada proporciona tensión sobre la inductancia 𝐿 , y a los condensadores
𝐶 y𝐶
𝐿
=𝑣
−𝑣
−𝑣
(2.5)
El voltaje sobre 𝐿 es el voltaje sobre 𝐶 pero en polaridad inversa
𝐿
= −𝑣
(2.6)
4
La corriente que atraviesa el condensador 𝐶 es la corriente es la misma que la corriente
que pasa por la inductancia 𝐿
𝐶
(2.7)
=𝑖
La corriente que atraviesa el condensador 𝐶 es la corriente que proviene de ambas
inductancias menos la corriente demandada por la carga 𝑅
𝐶
=𝑖
+𝑖
−
(2.8)
Combinando las ecuaciones anteriores en un solo sistema de ecuaciones en función de 𝑆 (𝑡),
que toma valores de 0 ó 1 dependiendo si está en ON o en OFF, reemplazando cada una de las variables
de estado por su "𝑥 " correspondiente y despejando las derivadas a la izquierda, obtenemos el
siguiente sistema de ecuaciones:
⇒
(1 − 𝑆 (𝑡))(−𝑥 − 𝑥 )
𝑑𝑥
𝑣
=
+
𝑑𝑡
𝐿1
𝐿
⇒
1 − 𝑆 (𝑡) ∙ 𝑥
𝑑𝑥
𝑆 (𝑡) ∙ 𝑥
=
−
𝑑𝑡
𝐿
𝐿
⇒
1 − 𝑆 (𝑡) ∙ 𝑥
𝑑𝑥
𝑆 (𝑡) ∙ 𝑥
=
−
𝑑𝑡
𝐶
𝐶
⇒
1 − 𝑆 (𝑡) (𝑥 + 𝑥 )
𝑑𝑥
𝑥
=
−
𝑑𝑡
𝐶
𝐶 ∙𝑅
(2.9)
Finalmente, Si utilizamos la ecuación (1.2) en términos de 𝑥 , tal que:
𝑥
𝑣 = 𝑘 ∙ ln 1 −
+𝑣
𝑖
Obtenemos nuestras ecuaciones de estado en términos de 𝑥 , 𝑥 , 𝑥 , 𝑥 y 𝑆
𝑥
𝑘 ∙ ln 1 −
+𝑣
(1 − 𝑆 (𝑡))(−𝑥 − 𝑥 )
𝑑𝑥
𝑖
⇒
=
+
𝑑𝑡
𝐿1
𝐿
⇒
1 − 𝑆 (𝑡) ∙ 𝑥
𝑑𝑥
𝑆 (𝑡) ∙ 𝑥
=
−
𝑑𝑡
𝐿
𝐿
1 − 𝑆 (𝑡) ∙ 𝑥
𝑑𝑥
𝑆 (𝑡) ∙ 𝑥
⇒
=
−
𝑑𝑡
𝐶
𝐶
⇒
1 − 𝑆 (𝑡) (𝑥 + 𝑥 )
𝑑𝑥
𝑥
=
−
𝑑𝑡
𝐶
𝐶 ∙𝑅
(2.10)
5
𝑉(𝑆 )
𝑉(𝑆 )
𝐼(𝑆 )
𝐼(𝑆 )
Fig. 2.1 Circuito equivalente de las ecuaciones de estado
3.-
Discusión
1.-
En circuitos RLC es de nuestro interés conocer que ocurre con la corriente a través de las
inductancias y voltajes en los capacitores por lo cual es lógico establecer estas incógnitas como
variable de estado, mencionar que hay tantas variables de estado como elementos que almacenan
energía (inductores y capacitores), por lo cual el sistema tendrá 4 ecuaciones.
2.-
La estrategia para resolver el circuito es hacer LVK cuando esté presente una inductancia y
hacer LCK cuando está presente un capacitor, pues de esta forma es más simple describir el modelo,
además si es necesario cambiar la variable de salida, será más fácil aplicar una transformación de
similitud.
6
Parte c)
1.-
Enunciado
Determine el modelo promedio donde 𝑆 (𝑡) es 𝑑(𝑡)y el modelo estático que relaciona
con 𝑢 , 𝑦 y 𝑝 . Dibuje un circuito equivalente a partir del modelo promedio y un
𝑥 ,𝑥 ,𝑥 ,𝑥
circuito equivalente a partir del modelo estático. A partir de este modelo determine 𝑢 , 𝑥 , 𝑥 , 𝑥
𝑥
tal que el voltaje 𝑣
y
alcanza los 40 Volts en estado estacionario. Considere 𝐿 = 20𝑚𝐻, 𝐶 =
Si
250𝜇𝐹, 𝐿 = 20𝑚𝐻, 𝐶 = 250𝜇𝐹 𝑦 𝑅 = 12 Ω.
hay
dos
soluciones,
seleccione
una
justificadamente.
2.-
Solución
Modelo Promedio:
Si la frecuencia de la señal portadora se hace tender a infinito. Entonces el valor promedio
de la señal de entrada se acerca cada vez más a la señal 𝑑(𝑡). En la práctica basta con reemplazar el
valor de la señal de entrada 𝑆𝑤(𝑡) con 𝑑(𝑡).
⇒
=
⇒
=
⇒
=
⇒
=
∙
( )∙
+
( ) (
)
( ) ∙
−
( ) ∙
( ) (
−
(3.2)
( )∙
)
−
(3.1)
(3.3)
∙
(3.4)
Para determinar el circuito equivalente para el modelo promedio, se hará uso de las ecuaciones
de estado del sistema.
Para la ecuación (3.1): Utilizando L.V.K se tiene un lazo cerrado dos fuentes de tensión
c.c. en serie, una de estas es dependiente de la señal 𝑑(𝑡) y están orientadas con
polaridad opuestas, Además estas se encuentran en serie con un inductor.
Para la ecuación (3.2): Similar a la ecuación (3.1) se realiza análisis de malla y se puede
resumir en un inductor en serie con una fuente de tensión dependiente de 𝑑(𝑡).
7
Para la ecuación (3.3): A diferencia de los anteriores, en este caso se plantea L.C.K en
un lazo cerrado con un nodo único con referencia a tierra. De esta forma se obtiene un
capacitor en serie con una fuente de corriente dependiente de la entrada 𝑑(𝑡).
Para la ecuación (3.4): De manera análoga a la ecuación (3.3) se realiza un análisis
nodal y se llega a la conclusión que el capacitor, la resistencia y la fuente de corriente
dependiente de 𝑑(𝑡) se encuentran en paralelo.
Todos los lazos cerrados se conectan mediante en cable común.
𝑉(𝑑)
𝐼(𝑑)
𝑉(𝑑)
𝐼(𝑑)
Fig. 3.1 Circuito equivalente del modelo promedio
Modelo estático
Cuando las señales del sistema tienden a ser constantes las derivadas se igualan a cero, o sea,
𝑑(𝑡) se hace una señal constante. Cuando el sistema llega a régimen estacionario, los inductores hacen
cortocircuito y los capacitores abren el circuito. Entonces las ecuaciones del modelo estático están
dadas por:
(1) 0 = 𝑘
(2) 0 = 𝑑 𝑥
∙ ln 1 −
𝑥
𝑖
+𝑣
− (1 − 𝑑 ) ∙ 𝑥
(3) 0 = (1 − 𝑑 ) ∙ 𝑥
−𝑑 ∙𝑥
(4) 0 = (1 − 𝑑 )(𝑥
+𝑥 )−
+ (1 − 𝑑 )(−𝑥
−𝑥 )
(3.5)
𝑥
𝑅
8
Para determinar el circuito equivalente del modelo estático se sigue el mismo procedimiento
al anterior. Solo que esta vez se toman en cuenta la condición de los elementos que almacenan energía
en un régimen constante. Teniendo esto en cuenta el circuito equivalente esta dado en Figure 3.2:
𝑉(𝑑 )
𝑉(𝑑 )
R1
𝐼(𝑑 )
12Ω
Fig. 3.2 Circuito equivalente del modelo estático
Con el modelo estático obtenemos cuatro ecuaciones para cinco incógnitas, ahora, como se
nos propone encontrar las demás variables con 𝑣
= 40 𝑉, tenemos la misma cantidad de ecuaciones
que de incógnitas, de esta forma podemos obtener cada una de las otras variables. Utilizaremos
Mathcad y Matlab para obtener estos resultados (teniendo en cuenta la no linealidad del sistema).
Fig. 3.3 Resultados obtenidos a través de Mathcad
9
3.-
Discusión
1.-
Cuando el sistema se encuentra en equilibrio las señales tienden a ser constantes por lo cual
sus derivadas son igual a 0, así podemos establecer un modelo estático y conocer valores de las
variables justo en ese punto.
2.-
Como se está resolviendo un sistema de ecuaciones no lineal, no es posible asegurar que exista
una única solución, esta solución depende del valor inicial que se otorga al software, un buen valor
inicial es ubicar a “d” en el rango ]0 1[, pues es lógico esperar que d se encuentre entre 0 y 1 ya que
en ese intervalo se está comparando la señal d con la señal portadora diente de sierra.
10
Parte d)
1.-
Enunciado
Grafique la potencia 𝑝
=𝑣
∙𝑖
anterior. ¿Cuál es la potencia del panel 𝑝
sistema 𝜂 = 𝑃 /𝑃
2.-
versus voltaje del panel 𝑣
e identifique la solución
para la solución anterior? ¿Cuál es la eficiencia del
?
Solución
Para obtener la gráfica “Potencia del panel vs Voltaje del panel” utilizaremos Mathcad con los
siguientes valores:
(4.1)
𝑃 [𝑊]
𝑃 (𝑣
)
:
𝑣
Fig. 4.1 Grafico “Potencia VS Voltaje” del panel
𝑣
[𝑉]
11
Luego 𝑝
y 𝜂 este dado por:
(4.2)
(4.3)
(4.4)
3.-
Discusión
1.-
Es esperable obtener un 100% de eficiencia ya que estamos trabajando con modelos ideales
en los cuales no existe una disipación de energía.
2.-
La potencia en el punto de equilibrio es inferior a la potencia máxima del sistema, si se ajustara
la entrada para obtener la máxima eficiencia obtendríamos también un sistema inestable que, a
términos prácticos, podría resultar menos útil según la aplicación
12
Parte e)
1.-
Enunciado
Simule el sistema conmutado para 𝑢(𝑡) = 𝑢 − 0.1𝑢(𝑡 − 30𝑚𝑠) + 0.2 u(t − 12) con una
función diente de sierra de periodo 𝑇 = 2𝑚𝑠. Considere un rango de simulación de 0 ≤ 𝑡 ≤ 200𝑚𝑠.
Grafique 𝑠 (𝑡), 𝑑(𝑡), 𝑆 (𝑡), 𝑣 (𝑡), 𝑣 (𝑡), 𝑣 (𝑡), 𝑖 (𝑡), 𝑖 (𝑡), 𝑝 (𝑡), 𝑝 (𝑡) y 𝜂(𝑡).
2.-
Solución
Para graficar 𝑠 (𝑡), 𝑑(𝑡), 𝑆 (𝑡) se utilizó Mathcad:
Graficando el diente de sierra 𝑠 (𝑡) y 𝑑(𝑡) con respecto al tiempo
(5.1)
(5.2)
Fig. 5.1 Grafico “𝚫𝒔; d VS 𝒕𝒊𝒆𝒎𝒑𝒐”
13
Graficando la señal 𝑑(𝑡) y 𝑆 (𝑡)
(5.3)
(5.4)
Fig. 5.2 Grafico “𝑺𝒘 ; 𝒅 𝑽𝑺 𝒕𝒊𝒆𝒎𝒑𝒐”
Si bien se solicita un tiempo de simulación de 200ms, se le da 1 segundo más a la simulación
para que el sistema llegue a régimen estacionario. Pues la señal 𝑢(𝑡) = 𝑢 − 0,1𝑢(𝑡 − 30𝑚𝑠) +
0,2𝑢(𝑡 − 120𝑚𝑠) implica que el sistema está funcionando en el punto de equilibrio para tiempos 𝑡
menor a cero. Las siguientes graficas están simuladas a partir del diagrama de bloques de la figura
(1.1) configurado en Simulink.
𝑣 (𝑡):
Fig. 5.3 Grafico de 𝒗𝑷𝑽 (𝒕)
14
𝑣 (𝑡):
Fig. 5.4 Grafico de 𝒗𝑪𝟏 (𝒕)
𝑣 (𝑡):
Fig. 5.5 Grafico de 𝒗𝑪𝟐 (𝒕)
𝑖 (𝑡):
Fig. 5.6 Grafico de 𝒊𝑳𝟏 (𝒕)
15
𝑖 (𝑡):
Fig. 5.7 Grafico de 𝒊𝑳𝟐 (𝒕)
𝑝 (𝑡):
Fig. 5.8 Grafico de 𝑷𝑷𝑽 (𝒕)
𝑝 (𝑡)
16
Fig. 5.9 Grafico de 𝑷𝑹 (𝒕)
𝜂(𝑡):
Fig. 5.10 Grafico de 𝜼(𝒕)
3.-
Discusión
1.-
Es necesario prestar especial atención al momento de realizar la simulación del sistema
mediante un software, pues es posible llega a una respuesta errada. No necesariamente por que las
ecuaciones están mal, sino que puede deberse a que el algoritmo utilizado no se ajuste al tipo de EDO
planteada, como es el caso de la función ode45 con las EDO de tipo stiff.
2.-
Una forma de validar la simulación del modelo es probar como señal de entrada 𝑑 . Y observar
si el sistema responde como lo determinado en el modelo estático. En este caso si el sistema tiene una
entrada constante 𝑑(𝑡) = 0.553 se espera que el sistema responda con 𝑣
≈ 40.
17
Parte f)
1.-
Enunciado
Utilice el modelo promedio del sistema obtenido en c) y repita la simulación con la entrada
como la utilizada en la parte e).
2.-
Solución
𝑣 (𝑡):
Fig. 6.1 Grafico de 𝒗𝑷𝑽 (𝒕)
𝑣 (𝑡):
Fig. 6.2 Grafico de 𝒗𝑪𝟏 (𝒕)
18
𝑣 (𝑡):
Fig. 6.3 Grafico de 𝒗𝑪𝟐 (𝒕)
𝑖 (𝑡):
Fig. 6.4 Grafico de 𝒊𝑳𝟏 (𝒕)
𝑖 (𝑡):
Fig. 6.5 Grafico de 𝒊𝑳𝟐 (𝒕)
19
𝑝 (𝑡):
Fig. 6.6 Grafico de 𝑷𝑷𝑽 (𝒕)
𝑝 (𝑡):
Fig. 6.7 Grafico de 𝑷𝑹 (𝒕)
𝜂(𝑡):
Fig. 6.8 Grafico de 𝜼(𝒕)
20
3.-
Discusión
1.-
La motivación de encontrar y simular un modelo promedio es que de él podemos extraer
información de forma más sencilla, usando menos recursos computacionales y de cálculo. Este
modelo promedio sería más fácil de discretizar sus variables de salida, así con la variable ya siendo
discreta podemos usarla en sistemas digitales o de análisis de datos.
21
Parte g)
1.-
Enunciado
Obtenga un modelo lineal 𝑨𝒍 , 𝒃𝒍 , 𝒄𝒍 , 𝑑 , 𝑒 , 𝑓 del modelo promedio obtenido en c) para el punto
de operación dado en c). Dibuje un circuito equivalente. Obtenga los valores propios de 𝑨𝒍 .
2.-
Solución
Para obtener un modelo lineal a partir de nuestro modelo promedio el cual es no lineal,
consideraremos los siguientes cambios de variable:
𝛥𝑥 = 𝑥 − 𝑥
𝛥𝑥 = 𝑥 − 𝑥
(7.1)
𝛥𝑥 = 𝑥 − 𝑥
𝛥𝑥 = 𝑥 − 𝑥
𝛥𝑑 = 𝑑 − 𝑑
Así se construimos un modelo lineal que conserva la misma estructura que el modelo anterior
(no lineal)
𝑑𝛥𝑥
⎛ 𝑑𝑡
𝑑𝛥𝑥
⎜
⎜ 𝑑𝑡
⎜𝑑𝛥𝑥
⎜
⎜ 𝑑𝑡
𝑑𝛥𝑥
⎝ 𝑑𝑡
5
0
⎛
⎞
𝐿 ∙ (𝑥 − 8)
⎟ ⎜
0
0
⎟=⎜
⎟ ⎜1−𝑑
𝑑
⎟ ⎜
−
𝐶
⎟ ⎜ 𝐶
1−𝑑 1−𝑑
⎠ ⎝ 𝐶
𝐶
𝑑 −1
𝐿
𝑑
𝐿
0
0
Luego sustituyendo los valores para 𝑥
𝑑 −1
𝐿 ⎞
𝑑 − 1⎟
𝐿 ⎟
⎟∙
0
⎟
1
⎟
−
𝑅𝐶
⎠
= 4.1170 𝑥
(𝑥
𝛥𝑥
𝛥𝑥
𝛥𝑥
𝛥𝑥
+𝑥
𝐿
⎛
⎜ (𝑥 − 𝑥
⎜
𝐿
+⎜
(−𝑥 − 𝑥
⎜
𝐶
⎜
(−𝑥 − 𝑥
𝐶
⎝
= 3.3333 𝑥
)
⎞
)⎟
⎟
∙ 𝛥𝑑
)⎟
⎟
⎟
)
⎠
= 32.3858 𝑥
(7.2)
= 40
𝑑 = 0.5526 , los cuales son los valores en el punto de equilibrio del sistema, obtenemos el siguiente
modelo lineal:
22
𝑑𝛥𝑥
⎛ 𝑑𝑡
𝑑𝛥𝑥
⎜
⎜ 𝑑𝑡
⎜𝑑𝛥𝑥
⎜
⎜ 𝑑𝑡
𝑑𝛥𝑥
⎝ 𝑑𝑡
−1.287
𝐿
0
⎞ ⎛
⎟ ⎜
⎟=⎜
⎟ ⎜0.4474
⎟ ⎜
⎟ ⎜ 𝐶
0.4474
⎠ ⎝ 𝐶
0
0
0.5526
−
𝐶
0.4474
𝐶
0.4474
𝐿
0.5526
𝐿
−
0.4474
𝐿 ⎞
0.4474⎟
−
𝐿 ⎟
⎟∙
0
0
⎟
1
⎟
0 −
12 ∙ 𝐶
⎠
−
𝛥𝑥
𝛥𝑥
𝛥𝑥
𝛥𝑥
72.3858
⎛ 𝐿
⎞
⎜−7.6142⎟
⎜ 𝐿
⎟
+⎜
∙ 𝛥𝑑
−7.4503⎟
⎜
⎟
⎜ 𝐶
⎟
−7.4503
⎝ 𝐶
⎠
(7.3)
Las ecuaciones de estado del modelo lineal quedan de la siguiente forma:
𝑑𝛥𝑥
1.287
0.4474
72.3858
=−
∙ 𝛥𝑥 −
∙ (𝛥𝑥 + 𝛥𝑥 ) +
∙ 𝛥𝑑
𝑑𝑡
𝐿
𝐿
𝐿
𝑑𝛥𝑥
0.5526
0.4474
7.6142
=
∙ 𝛥𝑥 −
∙ 𝛥𝑥 −
∙ 𝛥𝑑
𝑑𝑡
𝐿
𝐿
𝐿
𝑑𝛥𝑥
0.4474
0.5526
7.4503
=
∙ 𝛥𝑥 −
∙ 𝛥𝑥 −
∙ 𝛥𝑑
𝑑𝑡
𝐶
𝐶
𝐶
(7.4)
𝑑𝛥𝑥
0.4474
1
7.4503
=
∙ (𝛥𝑥 + 𝛥𝑥 ) −
∙ 𝛥𝑥 −
∙ 𝛥𝑑
𝑑𝑡
𝐶
12 ∙ 𝐶
𝐶
Del cual se obtiene el siguiente circuito equivalente:
Fig. 7.1 Circuito equivalente del modelo lineal
Para obtener los valores propios de A, se reemplazan los parametros en la matriz con lo cual
se obtiene:
−64 0
0
0
𝐴=
1760 −2200
1760 1760
−22 −22
27.5 −22
0
0
0 −333.3
(7.5)
23
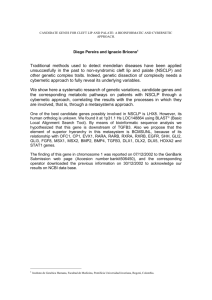
Se usa el siguiente código en Matlab para obtener los valores propios
Fig. 7.2 Algoritmo para obtener los valores propios otorgado por Matlab
Obteniendo los resultados:
𝜆 = −186 ∓ 232𝑖
(7.6)
𝜆 = −12 ∓ 315𝑖
(7.7)
3.-
Discusión
1.-
La motivación para encontrar un modelo lineal es debido a que existe una mayor información,
herramientas y recursos matemáticos para modelos lineales que para modelos no lineales.
24
Parte h)
1.-
Enunciado
Simule
el
modelo
lineal
con
la
entrada
usada
en
e)
y
grafique
𝑑(𝑡), 𝑣 (𝑡), 𝑣 (𝑡), 𝑖 (𝑡), 𝑖 (𝑡), 𝑝 (𝑡), 𝑝 (𝑡) y 𝜂(𝑡) y compare estos resultados con los obtenidos
en e) y f).
2.-
Solución
𝑑(𝑡):
M. Conmutado
M. Promedio
M. Linealizado
Fig. 8.1 Grafico de 𝒅(𝒕)
𝑣 (𝑡):
M. Conmutado
M. Promedio
M. Linealizado
Fig. 8.1 Grafico de 𝒗𝑪𝟏 (𝒕)
25
𝑣 (𝑡):
M. Conmutado
M. Promedio
M. Linealizado
Fig. 8.1 Grafico de 𝒗𝑪𝟐 (𝒕)
𝑖 (𝑡):
M. Conmutado
M. Promedio
M. Linealizado
Fig. 8.1 Grafico de 𝒊𝑳𝟏 (𝒕)
𝑖 (𝑡):
M. Conmutado
M. Promedio
M. Linealizado
Fig. 8.1 Grafico de 𝒊𝑳𝟐 (𝒕)
26
𝑝 (𝑡):
M. Conmutado
M. Promedio
M. Linealizado
Fig. 8.1 Grafico de 𝒑𝑷𝑽 (𝒕)
𝑝 (𝑡):
M. Conmutado
M. Promedio
M. Linealizado
Fig. 8.1 Grafico de 𝒑𝑹 (𝒕)
𝜂(𝑡):
M. Conmutado
M. Promedio
M. Linealizado
Fig. 8.1 Grafico de 𝜼(𝒕)
27
3.1.-
Discusión
El modelo lineal responderá de mejor forma en las cercanías del punto de equilibrio, pues la
linealización del modelo se hizo en torno a ese punto, la respuesta del modelo lineal en otros puntos
dependerá de las características del modelo original, si es fuertemente no lineal o débilmente no lineal,
el circuito responderá de peor forma o de mejor forma respectivamente.
28
Discusión Final
1.-
Sumario
Se presenta el circuito de una fuente conmutada Sepic, el objetivo es modelar un sistema para
la salida de este circuito que es 𝑉 , se identifican entradas, salidas y variables de estado poniendo
atención en los elementos que almacenan energía, luego de esto se hace un análisis de nodos y mallas
para representar el circuito de forma matemática, con esto obtenemos dos modelos, un modelo
conmutado ya que depende de la variable de entrada 𝑆 , y un modelo promedio ya que la variable de
entrada ahora es “𝑑”, con el fin de encontrar un punto de equilibrio para nuestros modelos se determina
un modelo estático, ya con este punto podemos simular ambos modelos (conmutado y promedio) y
ver cuál es su comportamiento, con el fin de tener un modelo más fácil de trabajar, se realiza la
linealización del modelo promedio con respecto al punto de equilibrio encontrado, luego se simula y
se comparan resultados con los sistemas anteriores.
2.-
Discusión
Es importante identificar correctamente que son parámetros, perturbaciones, entradas y
salidas, una buena idea es ver qué elementos son los que almacenan energía en este circuito, luego la
estrategia es usar LVK cuando tenemos inductores y usar LCK cuando tenemos capacitores. Para
seguir con el análisis debemos encontrar un punto de equilibrio, en este punto las señales de entrada
tienden a ser constantes, lo que implica que sus derivadas se hacen 0 y establecemos un modelo
estático, de aquí encontramos valores para todas las variables en un punto de equilibrio resolviendo
un sistema de ecuaciones no lineal, proponiendo una condición inicial adecuada. Con todo lo anterior
ya se puede iniciar una simulación de los sistemas obtenidos. Es importante prestar atención al
software al momento de solucionar las EDOS pues nos puede entregar una solución errada y no
representar el fenómeno que estamos buscando, podemos validar la solución entregada analizándola
en el punto de equilibrio. Trabajar con modelos no lineales puede ser complejo así que es
recomendable linealizar el sistema de esta forma se poseen más herramientas para trabajar. En la
simulación del modelo linealizado se puede apreciar que representa de manera fidedigna el sistema
en las cercanías del punto de equilibrio.
29
Bibliografía
[1]
Página personal del Prof. José R. Espinoza C., http://www2.udec.cl/jose.espinoza/ .
[2]
Material de clases del curso Sistemas lineales dinámicos 543214-2 a la fecha del 22 de abril
de 2021.
30
Anexo A.
1.-
Leyes Importantes
Ley de Ohm
La ley de Ohm es la ley fundamental de la ingeniería eléctrica y electrónica. Recordarla es
requisito mínimo. La ley es,
v Ri ,
(A.1)
donde R es una resistencia.
2.-
Leyes de Kirchhoff
a) Ley de corrientes de Kirchoff
En cualquier nodo de un circuito eléctrico, sucede que la suma de las corrientes que fluyen
hacia el nodo menos las corrientes que salen es igual a cero.
Σ
𝐼 = 𝐼 + 𝐼 + 𝐼 + ⋯+ 𝐼 = 0
(A.2)
b) Ley de tensiones de Kirchhoff
En un circuito cerrado, la suma todas las caídas de tensión de los componentes es
equivalente a la tensión total suministrada.
Σ
𝑉 =𝑉
𝑉 = 𝐶𝑎𝑖𝑑𝑎𝑠 𝑑𝑒 𝑡𝑒𝑛𝑠𝑖ó𝑛 𝑘 = {0,1,2, … , 𝑛}
(A.3)