European Journal of Operational Research 213 (2011) 83–95
Contents lists available at ScienceDirect
European Journal of Operational Research
journal homepage: www.elsevier.com/locate/ejor
Production, Manufacturing and Logistics
An inventory model for slow moving items subject to obsolescence
Çerağ Pinçe a,⇑, Rommert Dekker b
a
b
Kühne Logistics University, Brooktorkai 20, 20457 Hamburg, Germany
Econometric Institute, Erasmus University, P.O. Box 1738, 3000 DR Rotterdam, The Netherlands
a r t i c l e
i n f o
Article history:
Received 10 May 2009
Accepted 8 February 2011
Available online 13 February 2011
Keywords:
Inventory control
Spare parts
Obsolescence
Advance policy change
Excess stock
Installed base
a b s t r a c t
In this paper, we consider a continuous review inventory system of a slow moving item for which the
demand rate drops to a lower level at a known future time instance. The inventory system is controlled
according to a one-for-one replenishment policy with a fixed lead time. Adapting to lower demand is
achieved by changing the control policy in advance and letting the demand take away the excess stocks.
We show that the timing of the control policy change primarily determines the tradeoff between backordering penalties and obsolescence costs. We propose an approximate solution for the optimal time to
shift to the new control policy minimizing the expected total cost during the transient period. We find
that the advance policy change results in significant cost savings and the approximation yields near optimal expected total costs.
Ó 2011 Elsevier B.V. All rights reserved.
1. Introduction
For many companies with service-centric operations, reducing
spare parts inventories without jeopardizing the availability of
the supported products is essential for their competitiveness. However, efficient management of expensive and slow moving parts
inventories is notoriously difficult due to scarcity of historical data,
fluctuations in demand rate and risk of obsolescence. As companies
become more aware of these facts, they have started to keep track
of changes in their own or customers’ base of installed products
(installed base), to trace customers and operating units more
closely and to react to changes in demand as early as possible. A
recent study by Jalil et al. (in press) reveals that at IBM, tracking
of the installed base for spare parts can lead to savings up to 58%
in transportation and inventory holding costs.
When contextual information is combined with installed base
tracking, the timing and the size of the shift in demand rate are
either known in advance or can be estimated reasonably accurately. In practice, such shifts typically occur when the size of the
installed base at certain geographical location changes. For example, when a customer announces that it will not renew the service
contract or that it will relocate its production equipment outside
the serviceable area, the after sales service provider can anticipate
a change in demand for parts. Similarly, when a customer decides
to upgrade its machinery, the old generation equipment usually
⇑ Corresponding author. Tel.: +49 40 328707 0; fax: +49 40 328707 209.
E-mail addresses: cerag.pince@the-klu.org, pince@ese.eur.nl (Ç. Pinçe), rdekker@
ese.eur.nl (R. Dekker).
0377-2217/$ - see front matter Ó 2011 Elsevier B.V. All rights reserved.
doi:10.1016/j.ejor.2011.02.013
leaves the installed base of the service provider or manufacturer
as a result of discarding or salvaging.
If a sudden change in demand rate can be foreseen, timely adaptation of the base stock levels is crucial for optimal stock control. In
such cases, an increase in demand can be handled relatively easily
by giving advance or emergency replenishment orders to be delivered before the increase occurs. However, adapting to a drop in demand is more difficult since natural attrition of excess stocks
depends on the demand process. For example, when a certain proportion of the installed base is relocated, service providers usually
suffer from excess inventories remaining at the previous location.
When relocation of spare parts with the installed base is not feasible, it becomes much more difficult to get rid of excess stocks due
to reduced demand. Consequently in many cases, these end up as
obsolete stocks.
Generation upgrades may result in a similar problem as well.
For example, when an airline announces the sale of its old generation aircrafts to countries outside Europe, the airline’s service providers can expect a sudden drop in demand for relevant parts at
their service locations in Europe. In such cases, if prior action is
not taken to adjust base stock levels, the excess stocks might become obsolete.
Even if the timing and the size of the drop are known exactly,
when to change the inventory control policy to minimize obsolete
stocks without staking availability remains a challenging question.
Adapting, too early leads to an unacceptable stockout risk, but
adapting too late may lead to obsolescence. Since availability can
be crucial for a company’s operations, stockouts can be detrimental
to its business. On the other hand, excess or obsolete stocks inflate
84
Ç. Pinçe, R. Dekker / European Journal of Operational Research 213 (2011) 83–95
the inventory carrying costs and may need to be relocated, salvaged or disposed of at an expense.
In this paper, we address this issue by focusing on a continuous
review inventory system of a slow moving item for which the
demand rate drops to a lower level at a known future time. We
assume that the inventory system is controlled according to a
one-for-one replenishment policy with a fixed lead time. Adapting
to lower demand is achieved by changing the control policy in advance and letting the demand process take away the excess stocks.
Our goal is to find the optimal time for a policy change and to
investigate its impacts on costs incurred during the transient
period. We aim to provide closed form, heuristic formulas for
operating characteristics that can be used to gain insight into the
impact of obsolescence and policy change time on finite horizon
transient period costs.
Our work is related to the inventory management models considering obsolescence. Hadley and Whitin (1962) are early contributors in this area. They analyze a finite horizon periodic review
inventory system in which the mean demand rate may vary in
every period and there is a finite number of possible obsolescence
dates. Pierskalla (1969) studies a similar problem with independent and identically distributed demands and zero lead times.
Brown et al. (1964) offer a more general model for obsolescence
in which the demand in each period is generated according to an
underlying Markov chain and the state probabilities are updated
in Bayesian fashion. Song and Zipkin (1996) employ a similar
Markovian submodel to reflect the processes leading to obsolescence by assuming that the current state of the process is
completely observable. They find that obsolescence has substantial
effects on inventory costs and that these effects cannot be
remedied by simple parameter adjustments.
Masters (1991), Joglekar and Lee (1993), David and Mehrez
(1995) consider the EOQ model in which the time to obsolescence
is exponentially distributed.
Compared to some of the models available in the obsolescence
literature, we make the simplifying assumption that the obsolescence time is deterministic. Yet, under this assumption we are able
to combine the advance policy change option with one-for-one
policy which is commonly used for slow moving inventories. As
such, compared to those models we propose a simpler, more practical policy specifically for slow moving items.
A stream of literature that is related to our study consists of the
excess stock disposal models. In these models the problem is to
determine the economic retention quantity (period) or equivalently the economic disposal quantity, when there is an excess
stock of an item. Earlier works by Simpson (1955), Mohan and Garg
(1961) and Hart (1973) investigate excess stock disposal for deterministic demand with possibility of obsolescence. Stulman (1989)
considers a continuous review inventory system with stochastic
demand but without obsolescence. Rosenfield (1989) investigates
a similar problem for slow moving items by including perishability
or obsolescence but without stockout penalties. All these studies
assume that excess stocks result from over purchasing or from a
drop in demand rate in the past. Therefore, the inventory level is
larger than the optimum level at time zero and the excess inventory is reduced first by disposing and then by natural attrition.
Although some excess stock disposal models also consider obsolescence, our model mainly differs from this literature by allowing
natural attrition before the excess occurs.
Another research stream that has links to obsolescence consists
of studies on inventory management of service parts at their final
phase. Most of these studies focus on finding the optimal final order quantity to be placed at the parts supplier at the beginning of
the final phase so that it will cover the demand for parts until the
last service contract expires (see e.g. Fortuin, 1980; Teunter and
Fortuin, 1999; Van Kooten and Tan, 2009; and the references
therein). They consider scenarios where the supplier discontinues
the production of parts and it is not possible to order them after
the final phase starts. Teunter and Klein Haneveld (2002a) study
an inventory system where it is possible to order the service part
throughout the final phase but at a higher unit price. The final
phase has a deterministic length and the demand follows a stationary Poisson process. At the end of the planning horizon, the
demand rate drops to zero and all obsolete stock is disposed of
against a unit disposal cost. There is backordering but demands
are lost if the obsolescence time is close enough, i.e. at least a lead
time ahead. The replenishment lead time is fixed. They propose an
ordering policy composed of an initial base stock level to take the
advantage of the low price at time zero and subsequent base stock
levels decreasing by one as obsolescence time approaches. By using
marginal analysis, they calculate the optimal policy minimizing the
total undiscounted cost. Our model mainly differs from theirs in
that partial obsolescence is allowed, i.e. demand rate does not necessarily drop to zero, and all demands are fulfilled regardless of
obsolescence time. Teunter and Klein Haneveld (2002b) use the
same policy to study a similar inventory system with a central
depot and repair kits, under the assumptions of full backordering
and zero lead times.
There are two main contributions of our study:
(i) We analyze the obsolescence problem specifically for a slow
moving, expensive item in a continuous review setting with
nonstationary stochastic demand. Our findings are consistent with earlier works that report obsolescence has significant effects on operating costs and should be taken into
account explicitly. Our numerical experiments reveal that
if the control policy is not changed in advance, the transient
period costs can increase significantly. Furthermore, we find
that the timing of the control policy change primarily determines the tradeoff between backordering penalties and
obsolescence costs.
(ii) We provide practical heuristic formulas to tradeoff the risk
of obsolescence and backordering specifically for expensive,
slow moving items with high downtime costs. It is well
known that continuous rather than periodic review policies
are preferable for these items since they require lower safety
stocks for the same level of availability. Thus, our formulas
can be used as a managerial guide to study the impacts of
advance policy change on operational costs and obsolete
inventories.
The remainder of this paper is organized as follows: In Section
2, we introduce the model and the transition control policy. In Section 3, we give the expressions for the operating characteristics of
the transient period and the objective function, and discuss their
general behavior. In Section 4, the results of our numerical study
are presented. Section 5 concludes with a discussion on the limitations of our model and proposes future research avenues. All proofs
are provided in the Supplementary material.
2. Model
We consider a single item, single location continuous review
inventory system for slow moving items with nonstationary demand process and fixed lead times. It is assumed that the demand
follows a Poisson process with rate k0 up to a pre-determined time
point T after which the demand rate drops to a lower state k1 and
stays there (i.e. k0 > k1 P 0). The inventory control policy is based
on the (S 1, S) policy which is commonly used for high cost low
demand items (Hadley and Whitin, 1963). According to this policy,
a replenishment order is placed whenever a demand occurs.
Ç. Pinçe, R. Dekker / European Journal of Operational Research 213 (2011) 83–95
We denote the steady state optimal base stock levels for demand
rates k0 and k1 with S0 and S1, respectively. They are calculated with
the standard formulas given in Hadley and Whitin (1963). We assume that the shift in demand rate is downward (i.e. S0 > S1 P 0).
In order to adapt to the new base stock level, we employ the following transition control policy based on the inventory position (the
net inventory level plus the quantity on order):
Policy: Up to time T X, a replenishment order of size one is placed
whenever the inventory position drops to the reorder level S0 1.
After time T X, a replenishment order of size one is placed whenever
the inventory position drops to the reorder level S1 1.
In other words, we use (S0 1, S0) policy until time T X and
(S1 1, S1) policy thereafter. Observe that according to this control
policy, adaptation to the new base stock level is achieved by not
giving N (=S0 S1) consecutive orders starting at X P 0 time units
earlier from time T. Hence, N excess stocks are taken away by demand starting from T X. Our goal is to find the optimal time to
initiate the excess stock removal process.
The rationale behind the proposed policy is that when the obsolescence date is known, early adaptation of base stock level should
tradeoff the risk of backordering and obsolescence, and decrease
the number of excess or obsolete stocks. We do not claim that
the proposed transition control policy is optimal. One would expect that the optimal policy involves a gradual decrease of the base
stock level rather than a single adjustment. We refer the reader to
Teunter and Klein Haneveld (2002a) for an example of such a policy proposed under different model assumptions. Indeed, a sophisticated policy allowing more than one base stock adjustment
would yield a better control over the stock run-down process.
Yet, implementing such a policy would be more complex from a
practical view point and computing the optimal policy parameters
would be more difficult. Moreover, in this study, we aim to propose
a practical policy which can be computed and implemented easily.
The analysis of the proposed policy under given model assumptions is already mathematically involved. Thus, we do not expect
that a closed form expression can be found for the operating characteristics under a more complicated policy. Furthermore, as we
demonstrate in our numerical experiments, the proposed policy
leads to an important reduction of obsolescence costs compared
to a policy without an early adaptation (X = 0). Therefore, we argue
that the proposed policy bears a reasonable balance between practicality and cost improvement.
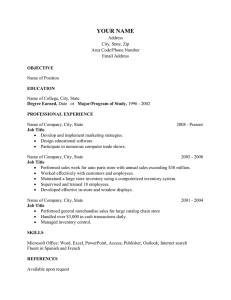
Fig. 1 shows a possible realization of the net inventory level
process {IL(t): t P 0} and the corresponding inventory position process {IP(t): t P 0}. Note that the trajectories of these processes can
85
be analyzed in three different periods. The first one starts at time
zero and ends at time T X. Since a replenishment order is placed
upon each demand arrival, the inventory position is fixed at S0 during the first period. We assume that T X is long enough so that
IL(t) is in steady state. This is reasonable since life cycles of many
products requiring parts replacements and service support are very
long. For example, the average useful life time of a commercial aircraft is up to 30 years. Thus, the inventory system of a spare part
supporting such a product has enough time to reach to steady state
before obsolescence occurs.
The second period begins at time T X and the excess stocks are
removed by not giving replenishment orders for N consecutive
demands. Hence, the inventory position decreases by one at every
demand arrival until it hits the target base stock level S1. In Fig. 1,
examples of stock removal instances are marked by circles on the
net inventory level process. If the inventory position process hits S1
before time T, the replenishment orders are placed again whenever
a demand occurs. Thus, the end of the second period is the random
time point greater than or equal to T at which the inventory
position is equal to S1 and all outstanding orders given before T
have arrived (see Fig. 1).
Note that the second period is the transient period in which the
inventory system adapts itself to the anticipated obsolescence.
Since all orders given before time T are replenished before the second period ends, the third period can be seen as a separate inventory system with demand rate k1 P 0. If k1 is positive, we assume
that the net inventory level process during the third period can
be described by the stationary process. In many practical situations
relocation of installed base or generation upgrades might result in
such partial obsolescence situations where the demand is severely
diminished but not necessarily vanished. Therefore, under partial
obsolescence there is no real obsolescence in the sense that the
item is no longer in demand after the obsolescence occurs. However, there is the risk of carrying excess stock for a relatively long
period of time due to a drop in demand. Thus, the holding costs incurred due to the excess stocks after partial obsolescence can be
seen as a form of obsolescence cost. Also note that under partial
obsolescence, the planning horizon is infinite, that is, the inventory
system keeps on operating under the low demand rate for an undetermined period of time. Thus, for this case, the third period is similar to the first but the system is controlled according to (S1 1, S1)
policy. On the other hand, in case of full obsolescence (k1 = 0) the demand completely vanishes and the item becomes obsolete after
time T. Hence, there is no third period for this case and obsolescence costs are incurred directly at time T.
Fig. 1. Possible realization of IL(t) and IP(t) with stock removals.
86
Ç. Pinçe, R. Dekker / European Journal of Operational Research 213 (2011) 83–95
Our main goal is to find the optimal X minimizing the expected
total (undiscounted) cost incurred in the second (transient) period.
As we will demonstrate in the numerical section, the transient period costs are significant since they include the costs related to
obsolescence. Unless prior action is taken, partial obsolescence
(k1 > 0) results in excess stock situations whereas full obsolescence
(k1 = 0) results in obsolete stocks. As discussed earlier, for many
slow movers, the costs due to obsolescence are very high under
both scenarios. Hence, in the sequel, we only focus on the analysis
of the transient period since under the proposed policy, savings
over obsolescence costs can be achieved only within this period.
Since fixed costs are irrelevant for optimization under a onefor-one replenishment policy, we only consider holding and
backordering costs incurred per unit per time, denoted by h and
p respectively. In addition, the unit obsolescence/relocation cost
co is incurred per remaining on hand inventory after T if full
obsolescence occurs (k1 = 0).
In the next section, we explain the transient analysis of the net
inventory level process, present the expressions for the operating
characteristics of the second period and state the optimization
problem.
3. Operating characteristics of the second period
Our model differs from the standard (S-1, S) inventory model
due to removal of excess stocks and nonhomogenous demand process. These differences necessitate the transient analysis of the net
inventory level process.
In order to calculate the expected on hand inventory carried and
the expected backorders during the second period, we identify possible trajectory scenarios based on arrival times of N successive demands after time T X. Then inventory carrying and backordering
costs are calculated by exploiting the recurrent structure of these
scenarios. Observe that the expected total cost incurred during the
transient period depends on the initial net inventory level at time
T X. Nevertheless, the outstanding orders before time T X complicate the analysis significantly. With the orders outstanding at
time T X, the starting position for the net inventory level is a random variable and the analysis requires a conditioning on the net
inventory level at time T X or on its expectation. Such conditioning
complicates the analysis drastically and prevents us from providing
closed form expressions for the operating characteristics.
In order to overcome this analytical difficulty and provide
good approximations for operating characteristics, we assume
that the net inventory level is equal to S0 at time T X. We
can justify this assumption by appealing to the characteristics
of the problem. For slow movers, the base stock levels are usually not very high due to low demand rates and high opportunity costs. On the other hand, the net inventory level process
mostly stays in the positive half-plane as a result of high backordering penalties. Therefore, the average net inventory level at
any time is not very far from S0. Indeed, for all the instances
used in our numerical experiments, which are generated to reflect real life scenarios, the average S0 is found to be 3.24 with
a maximum of 10. For the same instances, the average difference
between S0 and E(IL(T X)) is found to be 1.1 with a maximum
of 5. Consequently, we observe that our approximate model performs quite satisfactorily compared to simulation. The effects of
our assumptions on operating characteristics and expected total
cost will be discussed in more detail in Section 3.4.2. Moreover,
as we will demonstrate in the numerical section, the optimal X
found by using our approximate formulas yields near optimal
expected total costs. Hence, we conclude that this assumption
does not change the main implications of our study.
The analysis of the net inventory level process is independent of
the time axis due to Poisson demand arrivals. Therefore, we shift
the beginning of the second period from T X to 0 for the sake
of clarity. Let si, i = 1, . . . , N denote the interarrival times between
not replenished demand instances when the arrival rate is k0. We
P
refer to Ak :¼ ki¼1 si as the arrival time of the kth demand before
the drop occurs.
Fig. 2 shows a realization in which the new base stock level S1
(=S0 N) is hit by the net inventory level process after the drop
in demand occurs at time X. Observe that, as a result of our
assumption about the outstanding orders (IL(T X) = S0), the net
inventory level process is tantamount to the inventory position
process until the N + 1st demand arrives. In the figure, uj,
j = 3, . . . , N denote the interarrival times between not replenished
demands arriving after time X. Hence, ujs are exponentially distributed with rate k1. Note that, in Fig. 2, the second period ends
immediately after the arrival of the Nth demand since the inventory position is equal to S1 and there are no outstanding orders before time X. On the other hand, if S1 is reached before time X,
replenishment orders are placed again for every demand arriving
thereafter. A realization of this scenario can be seen in Fig. 3.
Fig. 2. Possible realization of IL(t) and IP(t) during 2nd period (AN > X).
87
Ç. Pinçe, R. Dekker / European Journal of Operational Research 213 (2011) 83–95
Fig. 3. Possible realization of IL(t) and IP(t) during 2nd period (AN 6 X).
Observe that, in Fig. 3, the second period ends at the moment the
last order given between AN and X is replenished.
From Figs. 2 and 3, it is clear that the net inventory level process
in the second period can be analyzed in two different phases. The
first is the stock removal phase. This is the time when the excess
stocks are taken away by the demand. Thus, the stock removal
phase starts at the beginning of the second period and ends when
the Nth demand arrives. The second is the regular operation phase.
This is the time when replenishment orders are placed again upon
every demand arrival since all excess stocks are removed before
drop in demand occurs. Hence, the regular operation phase starts
at AN and ends when the second period ends (see Fig. 3). Note that
the regular operation phase of the second period exists if and only
if the Nth excess stock is removed before time X (i.e. AN 6 X).
We begin our analysis with the calculation of the expected on
hand inventory carried during the second period denoted by
E[OH]. Observe that the random variable OH depends on the arrival
time of the kth demand during the stock removal phase, and therefore it can be calculated by conditioning on Ak, k = 1, . . . , N. If the arrival time of the first demand A1 is greater than X, the second
period ends at the moment Nth demand arrives. Thus, OH is equal
to the on hand inventory carried until time X (=S0X) plus another
P
random variable OH01 ¼ Ni¼1 ðS0 i þ 1Þui representing the on
hand inventory carried from time X until the second period ends.
Note that if the stock removal phase extends after time X, the trajectory of IL(t) should be analyzed separately for the periods before
and after time X due to different demand rates. Hence, there is a
need for an additional random variable OH01 . On the other hand,
if A1 is less than or equal to X, OH is equal to the on hand inventory
carried until the first demand arrives (=S0s1) plus another random
variable OH2. Essentially, OH2 is similar to OH but it depends on A2
and the new inventory level S0 1. Put more formally,
(
OH ¼
S0 X þ
OH01
S0 s1 þ OH2
if A1 > X;
ð1Þ
if A1 6 X:
OH0k ¼
N
X
ðS0 i þ 1Þui ;
k ¼ 1; . . . ; N
ð3Þ
i¼k
represents the on hand inventory carried from time X until the end of
the stock removal phase when N k + 1 stocks are yet to be removed.
The recursive structure of (1) and (2) gives the positive area under the net inventory level process depending on whether the kth
excess stock is removed before time X. For example, if all excess
stock is not removed before time X (i.e. Ak > X for some k), (1)
and (2) give the area under a similar scenario depicted in Fig. 2.
Otherwise, they give the area similar to the one shown in Fig. 3.
Note that (1)–(3) mainly generate the expressions for the on
hand inventory carried during the stock removal phase. Since no
orders are placed in this phase, the equations are independent of
the lead time. The on hand inventory carried in the regular operation phase is represented implicitly in those equations with the
random variable OHN+1. The shaded region in Fig. 3 shows a possible realization of OHN+1. We will analyze the regular operation
phase in detail in the sequel.
Let p(n; k) = ekkn/n!, n = 0, 1, 2, . . . be the pdf of Poisson distribution with parameter k P 0 and denote its cdf with Pðn; kÞ ¼
Pn
k¼0 pðk; kÞ. Also, let 1() denote the indicator function.
Taking expectations of (1) and (2), and exploiting the recurrence
structure, E[OH] can be found as follows.
Theorem 1. The expected on hand inventory carried during the
second period is given by
E½OH ¼ F ðXÞ þ E½OHNþ1 1ðAN 6 XÞ;
ð4Þ
where
N1
N1
k0 k1 X
þ
F ðXÞ :¼ k1
N
S
ðS0 iÞPði; k0 XÞ;
0
0
2
k0 k1 i¼0
k1 > 0
ð5Þ
If we continue in this fashion for k = 2, 3, . . . , N when N P 2, we come
up with the following recursive equations to calculate the on hand
inventory carried during the second period:
8
0
>
< ðS0 k þ 1ÞðX Ak1 Þ þ OHk
OHk ¼ ðS0 k þ 1Þsk þ OHkþ1
>
:
0
where
if Ak1 6 X; Ak > X;
if Ak 6 X;
o:w:;
ð2Þ
is the expected on hand inventory carried during the stock removal
phase and E[OHN+11(AN 6 X)] is the expected on hand inventory carried
during the regular operation phase.
So far we have derived the closed form expressions only for the
expected on hand inventory carried during the stock removal
phase. In the sequel, we provide an exact transient analysis of
88
Ç. Pinçe, R. Dekker / European Journal of Operational Research 213 (2011) 83–95
the inventory level process during the regular operation phase and
derive expressions for the operating characteristics of this phase.
hand inventory carried during this period is the positive area under
the expected trajectory of the net inventory level process from 0 to
X AN + L. Thus, for a given AN this area can be computed as follows:
3.1. Analysis of the regular operation phase
E½OHNþ1 1ðAN 6 XÞjAN ¼ s ¼
We want to compute the expected on hand inventory carried
and the expected time weighted backorders incurred in the regular
phase which starts at time AN (6X) and lasts until the end of the
second period. To compute these operating characteristics, we represent the inventory level process in terms of the demand process.
Since we are only interested in the time period after AN, we shift
the time axis from AN to 0 for clarity. Hence, the drop in the demand occurs X AN time units after the regular operation phase
begins (see Fig. 3). Thus, for t P 0 the inventory level IL(t) conditional on AN can be given as:
ILðtÞjAN ¼
S1 DðtÞ
if t 6 L;
S1 ðDðtÞ Dðt LÞÞ if t > L;
ð6Þ
KðtÞ ¼
1 1
SX
E ðILðtÞÞþ jAN ¼ s ¼
ðS1 nÞPðDðtÞ ¼ nÞ1ðt 6 LÞ
n¼0
þ
SX
1 1
ðS1 nÞPðDðtÞ Dðt LÞ ¼ nÞ1ðt > LÞ:
n¼0
ð12Þ
Substituting (12) in (11) yields
E½OHNþ1 1ðAN 6 XÞjAN ¼ s ¼
SX
1 1
Z
ðS1 nÞ
þ
Z
0
XsþL
L
L
eKðtÞ ðKðtÞÞn
dt
n!
e½KðtÞKðtLÞ ðKðtÞ Kðt LÞÞn
dt
n!
and from (10) we obtain that,
E½OHNþ1 1ðAN 6 XÞ ¼
k0
if z 6 X AN ;
k1
if z > X AN :
SX
1 1
ðS1 nÞ
n¼0
Z XsþL
ð8Þ
þ
L
Substituting (8) in (7) yields
ð13Þ
ð7Þ
with arrival rate
KðtÞ ¼
ð11Þ
From (6),
n¼0
0
kðzÞ ¼
E ðILðtÞÞþ jAN ¼ s dt:
t
kðzÞdz
XsþL
0
where {D(t): t P 0} is a nonhomogenous Poisson process with intensity function K(t): [0, 1) ? [0, 1) given by
Z
Z
if t 6 X AN ;
ðk0 k1 ÞðX AN Þ þ k1 t
if t > X AN :
ð9Þ
Eq. (6) is the representation of the net inventory level at any
time point based on the demand up to time t, the lead time
demand and inventory position. Recall that the inventory position
remains constant at S1 during the regular operation phase since an
order is placed each time there is a demand. Therefore, if t 6 L then
IL(t) is equal to the inventory position minus the total demand up
to time t. Whereas, if t > L then IL(t) is equal to the inventory
position minus the lead time demand.
The end of the regular operation phase is a random time point
depending on the net inventory level at time X. For example, if
the net inventory level at time X is equal to S0 N, there are no
outstanding orders and the regular operation phase ends. Otherwise, it ends when all outstanding orders given between X L
and X are replenished up to time X + L. However, to simplify the
analysis, we assume that the regular operation phase always ends
at time X + L. This approximation simply results in the overestimation of the expected total cost due to extended calculation period
but does not change the optimal X drastically. This is because for
high k0, the actual random end time of the regular operation phase
is not far from X + L due to higher likelihood of outstanding orders
before X, and therefore, the error in the cost will be low. For low k0,
on the other hand, the expected total cost is determined largely by
the stock removal phase. Thus, an extended length of the regular
operation phase will not have a big impact on the optimal X.
We start with the computation of E[OHN+11(AN 6 X)] by conditioning on AN such that,
Z
0
0
0
eKðtÞ ðKðtÞÞn
dt
n!
e½KðtÞKðtLÞ ðKðtÞ Kðt LÞÞn
dt fAN ðsÞds:
n!
ð14Þ
k0 t
E½OHNþ1 1ðAN 6 XÞ ¼
X Z L
Z
X
E½OHNþ1 1ðAN 6 XÞjAN ¼ sfAN ðsÞds;
ð10Þ
where fAN ðsÞ is the pdf of the Erlang distribution with parameters N
and k0.
We are interested in expected on hand inventory carried from
time AN until X + L. Since the time axis is shifted, the expected on
We define the following functions,
bN ðr; n; qÞ :¼
rþn1
n1
qn ð1 qÞr
and
nðr; nÞ :¼ npðr þ n; k0 XÞ
rþn
r
X
r
n
k¼0
k
ð1Þk X L
X
nþk
nþk
;
where r 2 {0, 1, 2, . . .}, n 2 {1, 2, . . .} and q 2 R. Moreover, we let
Pðn; kÞ :¼ 1 Pðn 1; kÞ denote the complementary cdf of Poisson
distribution.
Eq. (14) can be calculated by partitioning the integrals by using
(9) and the relationship between X and L. The following theorem
gives the result.
Theorem 2. For k1 > 0, the expected on hand inventory carried during
the regular operation phase is given by
E½OHNþ1 1ðAN 6 XÞ ¼
8 S 1
1
P
>
>
ðS1 nÞ½f ðnÞ þ g 1 ðnÞ if L 6 X;
>
<
n¼0
SP
>
1 1
>
>
:
ðS1 nÞ½f ðnÞ g 2 ðnÞ if L > X;
ð15Þ
n¼0
where
1 Pðn; k1 LÞ
f ðnÞ ¼
þ
PðN; k0 XÞ
k0
k0 k1
k0 k1
½PðN þ n; k0 XÞ PðN 1; k0 XÞ;
ð16Þ
þ
k0 k1
g 1 ðnÞ ¼ pðn; k0 LÞ ðX LÞPðN; k0 ðX LÞÞ k1
0 NPðN þ 1; k0 ðX LÞÞ
n
2k0 k1
ðk0 k1 Þ X
nði; NÞ
Pðn; k0 LÞPðN; k0 ðX LÞÞ k0 k1 i¼0
k0 ðk0 k1 Þ
n X
i
X
k0
k0
dðkÞ
pði k; k1 L þ ðk0 k1 ÞX ÞbN k; N;
k1 ðk0 k1 Þ i¼0 k¼0
k1
ð17Þ
89
Ç. Pinçe, R. Dekker / European Journal of Operational Research 213 (2011) 83–95
with d(k) = P(N + k 1; k1(X L)) P(N + k 1;k1X).
k0
k1 ðk0 k1 Þ
g 2 ðnÞ ¼
n
X
i
X
(4). Similarly, in Eq. (5) the term representing the expected inven
PN1
tory carried after the drop ¼ k1
becomes
i¼0 ðS0 iÞPði; k0 XÞ
1
pði k; k1 L
i¼0 k¼0
þ ðk0 k1 ÞXÞbN k; N;
k0
PðN þ k; k1 XÞ:
k1
ð18Þ
The expected time weighted backorders incurred during the
regular operation phase can be calculated essentially the same
way as described above.
Theorem 3. The expected time weighted backorders incurred during
the regular operation phase is given by
E½BO ¼
8 1
P
>
>
ðn S1 Þ½f ðnÞ þ g 1 ðnÞ if L 6 X;
>
<
n¼S1
1
P
>
>
>
ðn S1 Þ½f ðnÞ g 2 ðnÞ if L > X:
:
ð19Þ
n¼S1
Proof. The proof is very similar to that of Theorem 2, therefore
skipped. h
irrelevant since under full obsolescence the stock removal can only
be possible before time X. Thus, the expected on hand inventory
carried during the second period can be given as:
E½OH ¼
k1
0
"
#
S0 1
S0 ðS0 þ 1Þ X
ðS0 iÞPði; k0 XÞ :
2
i¼0
ð23Þ
If full obsolescence occurs before all of the excess stocks are
removed, the remaining on hand inventory is usually salvaged
(disposed) or relocated. In this case the obsolescence cost co is
incurred per unit of remaining inventory at the end of the second
period. In case of salvaging, co can be interpreted as the overage
cost of the well known newsboy problem. Otherwise, it can be seen
as the cost of transporting per unit of remaining inventory to a
location where demand is healthier. Since S0 items should be
removed before time X, the expected number of remaining stock
at the end of the second period can be given by the following
expression:
E½RS ¼
SX
0 1
ðS0 iÞpði; k0 XÞ;
ð24Þ
i¼0
3.2. Objective function
We can now obtain the expected total cost incurred in the second period by using the operating characteristics derived above.
The general structure of the expected total cost can be given as
follows:
TCðXÞ ¼ hE½OH þ pE½BO:
ð20Þ
Using (4), (15) and (19) in (20) and defining,
cðxÞ :¼
hx
if x > 0;
px if x 6 0;
ð21Þ
we obtain that,
TCðXÞ ¼ hF ðXÞ þ
8P
1
>
cðS1 nÞ½f ðnÞ þ g 1 ðnÞ if L 6 X;
>
<
n¼0
1
P
>
>
:
cðS1 nÞ½f ðnÞ g 2 ðnÞ if L > X:
ð22Þ
where p(i; k0X) is the probability that i items are demanded from the
beginning of the second period until the obsolescence occurs. Note
that E[RS] is not affected by our assumption that there are no outstanding orders at the beginning of the second period since the
number of stocks removed before time X only depends on the demand arrival process but not on the net inventory level process.
Moreover, it can be easily shown that E[RS] is convex in X.
The two analyses of the regular operation phase for both cases –
full and partial obsolescence – are similar. However, under full
obsolescence there is no on hand inventory carried during the regular operation phase since the target base stock level (S1) is equal
to zero. The expression for the expected time weighted backorders
incurred during the regular operation phase is given by the following theorem.
Theorem 4. For k1 = 0, the expected time weighted backorders
incurred during the regular operation phase is given by
n¼0
Our objective is to find the optimal X(P0) minimizing TC(X).
Despite the complicated appearance of (16)–(18), the optimal solution of TC(X) can be found easily. This is because (16)–(18) are
mainly composed of elementary probability functions and some
combinatorial expressions. For the dimensions that we are interested in, all of these functions can be computed easily. Besides,
as we will discuss in more detail in Section 3.4, TC(X) is observed
to be unimodal in X. Hence, optimal X can be searched very efficiently with standard nonlinear optimization methods.
3.3. Full obsolescence case (k1 = 0)
So far we have considered an inventory system facing obsolescence in which demand drops to a lower level but does not vanish
(k1 > 0). However, in some practical cases the demand might disappear after a certain time and the remaining stocks are either sold in
secondary markets or sent to locations where demand is still
healthy. Although the analysis of the net inventory level process
under full obsolescence is essentially the same as described in
the previous section, the operating characteristics and the objective function have to be slightly modified.
When k1 = 0 the number of excess stocks to be removed is equal
to S0, and therefore the inventory is carried only during the stock
removal phase. Hence, the term E[OHN+11(AN 6 X)] drops from
E½BO ¼
8P
1
>
n½f ðnÞ þ gðnÞ if L 6 X;
>
<
n¼0
1
P
>
>
:
nf ðnÞ
ð25Þ
if L > X;
n¼0
where
f ðnÞ ¼ k1
0 2PðN þ n þ 1; k0 XÞ þ NpðN þ n þ 1; k0 XÞ
ðX LÞpðN þ n; k0 XÞ;
ð26Þ
gðnÞ ¼ pðn; k0 LÞ ðX LÞPðN; k0 ðX LÞÞ k1
0 NPðN þ 1; k0 ðX LÞÞ
"
#
n
X
2k1
Pðn; k0 LÞPðN; k0 ðX LÞÞ nði; NÞ
0
i¼0
þ ðX LÞnðn; NÞ k1
0 Nnðn; N þ 1Þ:
ð27Þ
Therefore, the expected total cost incurred during the second
period under full obsolescence can be given as
TCðXÞ ¼ hE½OH þ co E½RS þ pE½BO:
ð28Þ
In our numerical experiments, we observe that TC(X) is unimodal in
X. Hence, the optimal solution of TC(X) can be found very easily for
the full obsolescence case as well.
90
Ç. Pinçe, R. Dekker / European Journal of Operational Research 213 (2011) 83–95
3.4. General behavior of objective function and effect of
approximations
In this section, we investigate the general behavior of the objective function and the operating characteristics in X, and compare
TC(X) with simulation to see the effect of our approximations on
the expected total cost. For numerical investigations, we generate
in total 252 experiment instances as summarized in Table 1. Note
that we generate 21 instances for a given set of system parameters
by varying X in order to observe the behavior in X. The system
Table 1
Experiment instances.
h=1
k0
k1
L
p
co
X
0.5
1
5
5
10
10
0
0
0
0
0
0
0.75
0.75
0.15
0.50
0.15
0.50
20
20
10
10
10
10
10
10
10
10
10
10
0–5
0–5
0–1
0–2
0–1
0–2
21
21
21
21
21
21
0.5
1
5
5
10
10
0.2
0.2
2
2
2
2
0.75
0.75
0.15
0.50
0.15
0.50
20
20
10
10
10
10
–
–
–
–
–
–
0–5
0–5
0–1
0–1
0–1
0–1
21
21
21
21
21
21
Total
Number of inst.
252
Note: For each range of X, 21 values are generated at equal intervals, e.g. for range
0–5, X 2 {0, 0.25, 0.50, . . . , 5}.
Fig. 4. Behavior of objective functions (k0 = 10, k1 = 2, L = 0.15, p = 10, h = 1, N = 2).
parameters are chosen so that there is at least one excess stock
to be removed for every instance, i.e., N P 1.
For each instance, simulated operating characteristics and
simulated expected total cost function are found by averaging
the values obtained from 5000 simulation runs of the net inventory level process. In the sequel, we use subscript ‘s’ to denote
the results obtained by simulation. Figs. 4 and 5 illustrate the
general behavior of the objective function and the operating
characteristics. Simulated values are given along with their 95%
confidence intervals.
3.4.1. General behavior of objective function and operating
characteristics
We observe that the expected total cost function is unimodal in
X (see Fig. 4). The intuition behind this behavior can be explained
as follows: If X is too short, the inventory system does not have
enough time to remove all excess stocks (N) before the drop in
demand occurs. Therefore, the remaining excess stocks either
increase the holding costs since the natural attrition of these stocks
takes longer due to diminished demand or they result in obsolescence cost – in case of full obsolescence – due to disposal or
relocation. On the other hand, if X is too long, all excess stocks
are removed too early and the inventory system returns to its regular operation before the drop in demand occurs. Consequently,
the system operates under a lower base stock level S1 until the
drop occurs and incurs more backordering costs (see Fig. 5(b)).
Therefore, there is an optimal X value balancing the obsolescence
related costs (extra holding cost, obsolescence/relocation cost)
with the cost of backordering.
Fig. 5(a) presents an example of a rapid decrease in the expected on hand inventory as X diverges from zero when k1 is positive. However, under full obsolescence, the behavior of the
expected on hand inventory is different. The inventory is carried
only in the stock removal phase and for small X values it usually
ends before all excess stocks are removed. Therefore, when
k1 = 0, the expected on hand inventory generally increases in X until it converges to a constant (the expected positive area under the
net inventory level process when the stock removal ends before
the drop occurs). Although the inventory system tends to carry less
stock as X decreases, the expected total cost continues to rise due
to the increase in the expected number of remaining stocks.
3.4.2. Comparison with simulation
Our two assumptions about the initial inventory level and the
end of the second period result in different sample paths of the
net inventory level process for our model and simulation in periods
[T X, T X + L] and [T, T + L]. If k1 is positive, E[OH] overestimates
E[OHs] due to higher on hand inventory level between T X and
Fig. 5. Behavior of operating characteristics.
91
Ç. Pinçe, R. Dekker / European Journal of Operational Research 213 (2011) 83–95
Table 2
Summary of the comparison of TC(X) and TCs(X).
jDsj (%)
k1 > 0
Min
Max
Mean
Median
Number of inst.
0.27
35.12
11.43
10.15
126
k1 = 0
0.01
3.80
1.26
1.09
126
Overall
0.01
35.12
6.34
2.91
252
T X + L, and the extended calculation period. This can be observed in Fig. 5(a). On the other hand, if k1 = 0, E[OHs] is larger
for X values near zero since the outstanding orders at time T X
are likely to arrive after time T and therefore, in simulations the
second period is likely to be longer compared to our model.
If k1 is positive, expected backorders are underestimated by
E[BO] as long as the initial inventory level S0 is high enough to cover demand before time T. However, as X gets larger, the system returns to its regular operation mode earlier and E[BO] begins to
overestimate E[BOs] due to the extended calculation period. For
example, in Fig. 5(b), we observe that E[BO] starts to overestimate
E[BOs] for the X values greater than 0.25. Furthermore, we find that
the performance of E[BO] is much better for the full obsolescence
case. This is because if the stock removal phase ends before T,
the sample path differences between simulation and our model
are only from T X until T X + L.
For positive k1 and small X values, we observe that the percentage difference between TC(X) and TCs(X) is relatively low since the
overestimation of E[OHs] is compensated by the underestimation
of E[BOs]. Moreover, TC(X) underestimates TCs(X) as long as the real
backordering cost is larger than the overestimated quantity in holding cost (i.e. pE[BOs] > h[E[OH] E[OHs]]). Otherwise, TC(X) is larger
than TCs(X) as a result of overestimation in holding costs. Similar
intuitive results are observed for the full obsolescence case as well.
The results of our numerical comparison of TC(X) and TCs(X) are
summarized in Table 2. We use absolute percent deviation from
the simulated expected total cost as the comparison metric, i.e.,
s ðXÞj
jDs j% ¼ jTCðXÞTC
100. Over all 252 instances, we find that absoTC s ðXÞ
lute percent deviation is on average 6.34%, and varying from 0.01%
to 35.12%. Moreover, for instances with partial obsolescence, the
average absolute percent deviation is 11.43% while it is only
1.26% for instances with full obsolescence as a result of increased
accuracy in E[BO] and the exact calculation of E[RS].
In Section 4.2, we will demonstrate that the simulated expected
total cost is quite robust around the optimal X found by simulation
optimization, and that the suboptimal X minimizing TC(X) is within
the vicinity of the optimal X. Thus, although the average absolute
percentage deviation between TC(X) and TCs(X) can be large for
k1 > 0, the suboptimal X yields near optimal expected total cost
when used with simulation. Therefore, in case there is a doubt
about the accuracy of TC(X) in optimality, one can use simulation
with the suboptimal X to calculate the near optimal expected total
cost. This approach would be more practical and less time consuming than simulation optimization.
4. Numerical study
In this section, we focus on the performance of the proposed
model in optimality and demonstrate the value of advance policy
change option. As such, we first investigate the changes in the
optimal policy parameter and the optimal expected total cost for
different parameter values. Then, we measure the overall performance of the best X minimizing TC(X) by comparing it with the
best X found by simulation optimization. We close the section with
a discussion about the value of advance policy change. In the
sequel, we use ‘⁄’ to indicate optimality and denote the best X
found by simulation optimization with X s .
Throughout the numerical study, we take the results obtained
by simulation as a benchmark. Thus, we compare TCs(X⁄) with
TC s ðX s Þ to measure the impact of changing the policy at X⁄ rather
than X s . As a simulation optimization technique, we employ
response surface methodology as described in Myers and
Montgomery (1995).
Parameter values used in numerical experiments are given in
Table 3. While generating the experiment instances, we mimic
realistic scenarios for slow movers and exclude trivial instances
with initial base stock level zero (S0 = 0). Observe from Table 3 that
for k1 > 0 there are in total 89 instances rather than 96. This is
because we discard seven instances which do not yield a positive
excess stock, i.e., the instances with N = 0. Thus, in total, we obtain
281 instances for which N 3. Some of the results from the
numerical study are tabulated in Tables 4 and 5. A summary of performance measures for all experiment instances is given in Table 6.
4.1. General behavior of optimal policy parameter and optimal total
cost function
As can be seen from Table 4, if k1 is positive, we do not always
observe monotonic behavior in optimal X values and optimal expected total costs due to discrete jumps in S0 or S1 as L or p increases. However, if an increase in L or p does not effect S0 and
S1 (and all other system parameters are constant), the optimal X
values decrease to reduce the risk of backordering.
For the full obsolescence case, we observe a similar non-monotonic behavior in the optimal values with respect to the changes in
L or p. However, optimal X and TCs() are monotonically increasing
in co since N is independent of the obsolescence cost. Thus, as co increases, optimal X values also increase to reduce the number of
remaining stocks, and the expected total costs rise as a result of
higher obsolescence penalty (see Table 5).
An important indicator for the behavior of the optimal X is the
ratio N/k0, the average time needed to remove Nth excess stock before the drop occurs. In general, we observe that optimal X values
and corresponding expected total costs are increasing in N/k0
(Fig. 6). This is expected since as the ratio increases more time is
needed to complete the stock removal process before the drop occurs. Hence, the system adjusts itself accordingly. On the other
hand, the increase in optimal values is not monotonic. This is because the ratio is only a measure of the stock removal phase but
not of the regular operation phase. That is, as N/k0 increases, the
X values are adjusted according to the changes in the optimal base
stock levels to balance the backordering cost incurred in the regular operation phase. Hence, the optimal values are not monotonically increasing in N/k0.
4.2. Overall performance of X⁄
Next, we compare the performance of X⁄ vis à vis X s . For comparison purposes, we use percent error which gives the percentage
Table 3
Parameter values for the numerical study.
h=1
k0
k1
co
p
L
0.5, 0.7, 1
5, 7, 10
0.5, 0.7, 1
5, 7, 10
Total
0
0
0.2
2
5, 10
5, 10
–
–
50, 75, 150, 300
5, 15, 25, 50
50, 75, 150, 300
5, 15, 25, 50
0.25,
0.05,
0.25,
0.05,
Number
of inst.
0.50,
0.15,
0.50,
0.15,
0.75,
0.25,
0.75,
0.25,
1
0.50
1
0.50
96
96
44
45
281
92
Ç. Pinçe, R. Dekker / European Journal of Operational Research 213 (2011) 83–95
Table 4
Performance of X⁄ and value of advance policy change for k1 > 0.
h=1
k0
k1
p
L
S0
N
X s
X⁄
Dx (%)
TC s ðX s Þ
TCs(X⁄)
Dc (%)
TCs(0)
Do (%)
0.5
0.2
50
0.50
0.75
1.00
0.50
0.75
1.00
2
2
2
2
3
3
1
1
1
0
1
1
1.80
1.29
0.96
–
1.65
1.24
1.64
1.11
0.80
–
1.45
1.05
8.94
13.77
16.60
–
11.88
15.43
7.66
8.35
9.06
–
11.73
12.52
7.73
8.51
9.25
–
11.80
12.62
0.88
1.89
2.07
–
0.65
0.81
10.17
10.19
10.33
–
15.22
15.28
31.61
19.73
11.69
–
28.96
21.10
0.50
0.75
1.00
0.50
0.75
1.00
2
3
3
3
4
5
1
2
2
1
2
3
1.02
1.71
1.40
1.16
1.74
2.26
0.87
1.58
1.31
1.06
1.65
2.19
15.02
7.24
6.07
8.32
4.78
2.98
6.88
14.47
16.22
9.20
19.86
32.32
6.88
14.53
16.41
9.24
20.12
32.77
0.01
0.40
1.12
0.42
1.28
1.40
10.07
24.88
24.94
15.08
34.84
59.46
46.34
71.21
52.03
63.23
73.17
81.45
0.05
0.15
0.25
0.05
0.15
0.25
1
2
2
2
3
4
1
1
1
1
1
2
0.18
0.24
0.16
0.19
0.18
0.29
0.15
0.19
0.12
0.16
0.14
0.25
13.36
20.66
23.52
13.33
23.67
14.17
0.39
0.70
0.84
0.78
1.15
2.51
0.40
0.71
0.86
0.78
1.19
2.55
1.60
0.74
2.11
1.25
3.42
1.75
0.50
0.96
0.98
0.99
1.48
3.39
24.38
35.62
13.95
26.33
23.79
32.75
0.05
0.15
0.25
0.05
0.15
0.25
1
3
4
2
4
6
1
2
3
1
2
4
0.12
0.29
0.35
0.11
0.21
0.33
0.09
0.25
0.30
0.09
0.18
0.31
21.22
14.01
13.07
20.35
12.23
6.55
0.34
1.02
1.81
0.68
1.88
4.27
0.34
1.04
1.82
0.69
1.89
4.33
0.19
1.30
0.27
1.69
0.51
1.22
0.51
2.42
4.28
1.02
3.44
8.79
47.96
133.47
135.56
46.98
82.05
103.16
300
1
0.2
50
300
5
2
5
50
10
2
5
50
Table 5
Performance of X⁄ and value of advance policy change for k1 = 0.
L = 0.25, h = 1
k0
p
co
N
X s
X⁄
Dx (%)
TC s ðX s Þ
TCs(X⁄)
Dc (%)
TCs(0)
Do (%)
0.5
50
5
10
5
10
1
1
2
2
0.44
1.00
0.36
0.93
0.43
0.99
0.40
0.94
2.34
1.25
9.40
1.27
4.73
8.22
9.88
18.11
4.74
8.22
9.89
18.14
0.16
0.02
0.11
0.16
5.03
10.03
10.02
20.02
6.17
21.99
1.35
10.36
5
10
5
10
2
2
2
2
0.86
1.40
0.29
0.50
0.87
1.40
0.32
0.53
1.19
0.51
11.00
6.05
8.26
13.31
9.44
17.40
8.28
13.31
9.48
17.40
0.28
0.04
0.44
0.03
10.03
20.03
10.06
20.06
21.16
50.50
6.17
15.30
5
10
5
10
2
2
4
4
0.59
0.75
0.52
0.67
0.59
0.75
0.52
0.67
0.78
0.65
0.33
0.07
3.37
4.32
11.77
18.33
3.38
4.34
11.82
18.35
0.45
0.40
0.47
0.12
10.14
20.14
20.30
40.30
199.65
363.86
71.73
119.65
5
10
5
10
4
4
6
6
0.56
0.66
0.43
0.53
0.55
0.65
0.44
0.53
1.99
1.79
1.09
0.14
4.74
5.88
14.74
22.75
4.74
5.90
14.76
22.79
0.15
0.36
0.12
0.19
20.38
40.38
30.68
60.68
329.45
584.32
107.88
166.20
300
1
50
300
5
5
50
10
5
50
Table 6
Overall summary of performance measures.
jDxj (%)
Dc (%)
k1 > 0
k1 = 0
Min
Max
Mean
Median
2.98
28.53
11.87
11.00
0.02
100.00
5.42
1.42
Number of inst.
89
192
k1 > 0
0.01
4.42
1.03
0.75
89
Do (%)
k1 = 0
0.00
3.44
0.56
0.38
192
k1 > 0
k1 = 0
11.69
191.98
60.66
51.77
0.00
860.71
133.04
60.08
89
192
deviation from the optimal values found by simulation optimiza
s
100 as the percent deviation
tion. Hence, we define Dx % ¼ X XX
from X s whereas Dc % ¼
s
TC s ðX ÞTC s ðX s Þ
TC s ðX s Þ
100 is defined as the percent
deviation from TC s ðX s Þ as a result of using X⁄ instead of X s . Fig. 7
illustrates a comparison of optimal X values and corresponding expected total costs.
We observe that the expected total cost is quite robust to the
changes in X s . For example, for the instances considered in Fig. 7,
we find that X⁄ underestimates X s on average by 9.21%. For the
same instances, however, the average deviation from the optimal
expected total cost is only 0.67%. This robust behavior of the expected total cost function can also be seen in Fig. 6. Moreover,
we find that X⁄ might underestimate or overestimate X s depending
on the interplay between the extra costs resulting from our two
main assumptions and the costs related with obsolescence. This
can be best observed in Table 5.
As can be seen from Table 6, for k1 > 0, the mean absolute deviation from X s is 11.87%. For the same instances, the expected total
cost increases on average by 1.03% as a result of using X⁄ instead of
X s . The maximum increase in the total cost is found to be 4.42%. For
93
Ç. Pinçe, R. Dekker / European Journal of Operational Research 213 (2011) 83–95
Fig. 6. Change in optimal values with respect to N/k0 (k0 varies from 5 to 10, N varies from 1 to 6).
Fig. 7. Performance of X ðk0 ¼ 10; k1 ¼ 2; N ¼ 4Þ.
k1 = 0, the mean absolute deviation from X s is 5.42%. The expected
total cost increases on average by 0.56% with a maximum of 3.44%.
Thus, we conclude that X⁄ performs satisfactorily and it gives near
optimal results for the expected total cost.
4.3. Value of advance policy change
Next, we discuss the value of changing the control policy to initiate the stock removal process before the drop in demand occurs.
To this end, we compare the expected total cost incurred by changing the policy X⁄ time units before the drop occurs with the expected total cost incurred by changing it immediately after the
drop occurs (X = 0). We use the benchmark case where it is possible
to change the policy in advance, that is, the decision maker uses X⁄
and incurs the cost TCs(X⁄). Alternatively, she can postpone the policy change to obsolescence time T. As such, the increase in total
cost by postponing the policy change reflects the value that the
decision maker gets by changing the policy in advance. For comparison purposes we use percent deviation in the expected total
s ðX Þ
cost defined as Do % ¼ TC s ð0ÞTC
100. Fig. 8 illustrates the
TC s ðX Þ
changes in Do% for different k0 and k1 values.
We find that the impact of advance policy change on the
expected total cost is significant. For example, in Fig. 8(a) for the
Fig. 8. Value of advance policy change.
94
Ç. Pinçe, R. Dekker / European Journal of Operational Research 213 (2011) 83–95
instances with k0 = 5, the expected total cost increases on average
by 29.8% as a result of changing the policy after the drop occurs.
The increase in total cost is due to the increase in inventory holding
costs since the natural attrition of the remaining excess stocks
takes longer once the drop occurs. Moreover, when all other
parameters are constant, Do% increases rapidly in k0. This can be
observed from Fig. 8(a); when k0 increases from 5 to 10 the average
percent deviation due to postponement increases from 29.8% to
134.92%. We refer the reader to Table 4 for more detailed results.
Our observations for the full obsolescence case are similar. However, if k1 = 0, the increase in the expected total cost is mainly due to
the obsolescence/relocation cost charged per remaining excess
stock. For the instances with k0 = 5 given in Fig. 8(b), the average
Do% rises from 129.07% to 228.12% as co doubles. Moreover, Do%
is decreasing in p. This is because as p increases, the cost of obsolescence becomes relatively cheaper compared to backordering and
the system tends to postpone the policy change towards the obsolescence time. These behaviors can be seen in more detail in Table 5.
Observe from Table 6 that in case of partial obsolescence, postponing the policy change after the obsolescence time increases the
expected total costs on average by 60.66%. The maximum increase
is 191.98%. In case of full obsolescence, we find that postponing the
policy change time has a more drastic effect on the expected total
cost due to high obsolescence/relocation penalties. For k1 = 0, the
expected total cost increases on average by 133.04% up to a maximum of 860.71%. These findings show that if obsolescence is anticipated, advance policy change can result in important savings.
5. Conclusion
In this paper, we consider a continuous review inventory system of a slow moving item in which the demand rate drops to a
lower level at a known future time instance. Adaptation to the
new demand rate is achieved by changing the control policy before
the drop occurs, and therefore allowing the demand take away the
excess stocks. We focus on the behavior of the net inventory level
process during the transient period and propose an approximate
solution for the optimal time to shift to the new control policy.
We find that the advance policy change results in significant cost
savings and the approximate policy change time yields near optimal expected total costs.
The key contribution of our study lies in the analysis of a continuous review inventory system facing nonstationary stochastic
demand in the context of obsolescence. Earlier works on obsolescence are mostly focused on periodic review models. The main insights from these works are that obsolescence has a substantial
impact on optimal policies and that it should be incorporated into
inventory control models explicitly. In our study, we extend these
findings to a continuous review system and show that the advance
policy change in face of pre-determined obsolescence results in
significant cost savings. Our numerical experiments reveal that,
for slow movers, the timing of the control policy change primarily
determines the tradeoff between backordering penalties and obsolescence costs.
The practical importance of our model is its consideration of
expensive, slow moving items with high downtime costs for which
continuous rather than periodic review policies are preferred due
to lower safety stock requirements. Efficient management of
inventories is notoriously difficult for this class of items. Not surprisingly, inventory managers of many companies in the after sales
service industry recurrently face the problem of obsolete or excess
inventories of such items. Knowing when to change the control
policy is the key to reduce obsolete inventories while balancing
availability. If the change is too early, the risk of backordering is
too high and the stockouts can be detrimental to a company’s
operations. On the other hand, if the change is too late, the risk
of obsolescence is too high and obsolete stocks are a dead weight
loss which weakens a company’s competitiveness. Our model can
be used to study the impact of the timing of policy change on operational costs and to identify the optimum time that balances the
tradeoff between the risk of obsolescence and backordering.
5.1. Limitations and future research
While developing our model, we rely on several assumptions to
simplify our analysis. Although some of these limit the generality
of our model, the model offers a better understanding of the transient behavior of inventory systems and the influence of advance
policy change on operational costs. Given the scarcity of research
on continuous review systems facing obsolescence, we consider
that our model achieves a reasonable balance between realism
and tractability for the insights obtained. Therefore, it can be seen
as a building block for more complicated and realistic models.
For the considered obsolescence problem, a more general policy
including pre- and post-obsolescence base stock levels besides policy change time could be analyzed exactly. Under such a policy the
appropriate objective function would be an infinite rather than a
finite horizon (transient period) cost. However, the exact analysis
of such a three-parameter policy is significantly more complex
than the one presented here and we do not expect that it will yield
simple, closed form expressions for the operating characteristics.
We are currently working on this extension.
An interesting and more difficult extension would be to analyze
the system under a more sophisticated policy allowing a gradual
decrease rather than a single adjustment of the base stock level.
Although such an extension would not be direct or easy with the
transient analysis method employed in this paper, the extension
might be possible by using marginal analysis or by discretizing
the time domain and using dynamic programming. Such sophisticated policies would provide a better control over the stock rundown process during the transient period and yield even lower
costs. Moreover, it is reasonable to expect that the optimal policy
structure would involve a gradual decrease of base stock levels.
As such, another important extension would be to show the structure of the optimal policy for this problem.
It would be useful to extend the model with the demand rate
decreasing by time. Such model would be more suitable for products at the end of their life cycles. Another possibility is to incorporate the uncertainty into the timing of obsolescence or into the size
of the drop in the demand rate. These extensions would yield interesting insights about the timing of a policy change. Extending the
model for a general class of continuous review control policies
seems particularly worthwhile because for many products, the
prospect of obsolescence has increased drastically due to rapid
changes in consumer taste and technological innovations.
Acknowledgements
The authors gratefully acknowledge Emre Berk, Hans Frenk and
the two anonymous reviewers for their valuable suggestions and
comments which have significantly improved the earlier versions
of this paper. This research is partially supported by the SLF
Research Project and by the Transumo Pilot Project.
Appendix A. Supplementary data
Supplementary data associated with this article can be found, in
the online version, at doi:10.1016/j.ejor.2011.02.013.
Ç. Pinçe, R. Dekker / European Journal of Operational Research 213 (2011) 83–95
References
Brown, G.W., Lu, J.Y., Wolfson, R.J., 1964. Dynamic modeling of inventories subject
to obsolescence. Management Science 11, 51–63.
David, I., Mehrez, A., 1995. An inventory model with exogenous failures. Operations
Research 43, 902–903.
Fortuin, L., 1980. The all-time requirement of spare parts for service after sales –
Theoretical analysis and practical results. International Journal of Operations
and Production Management 1, 59–69.
Hadley, G., Whitin, T.M., 1962. A family of dynamic inventory models. Management
Science 8, 458–469.
Hadley, G., Whitin, T.M., 1963. Analysis of Inventory Systems. Prentice Hall, Inc.,
Englewood Cliffs, NJ.
Hart, A., 1973. Determination of excess stock quantities. Management Science 19,
1444–1451.
Jalil, M.N., Zuidwijk, R.A., Fleischmann, M., Van Nunen, J.A.E.E. (in press). Spare parts
logistics and installed base information. Journal of Operational Research
Society.
Joglekar, P., Lee, P., 1993. An exact formulation of inventory costs and optimal
lot size in face of sudden obsolescence. Operation Research Letters 14,
283–290.
Masters, J.M., 1991. A note on the effect of sudden obsolescence on the optimal lot
size. Decision Sciences 22, 1180–1186.
95
Mohan, C., Garg, R.C., 1961. Decision on retention of excess stock. Operations
Research 9, 496–499.
Myers, R.H., Montgomery, D.C., 1995. Response Surface Methodology, Wiley Series
in Probability and Statistics, New York.
Pierskalla, W.P., 1969. An inventory problem with obsolescence. Naval Research
Logistics Quarterly 16, 217–228.
Rosenfield, D.B., 1989. Disposal of excess inventory. Operations Research 37, 404–409.
Simpson, J., 1955. A formula for decision on retaining or disposal of excess stock.
Naval Research Logistics Quarterly 2, 145–155.
Song, J., Zipkin, P., 1996. Managing inventory with the prospect of obsolescence.
Operations Research 44, 215–222.
Stulman, A., 1989. Excess inventory with stochastic demand: Continuous reporting
model. Journal of the Operational Research Society 40, 1041–1047.
Teunter, R.H., Fortuin, L., 1999. End-of-life service. International Journal of
Production Economics 59, 487–497.
Teunter, R.H., Klein Haneveld, W.K., 2002a. Inventory control of service parts in the
final phase. European Journal of Operational Research 137, 497–511.
Teunter, R.H., Klein Haneveld, W.K., 2002b. Inventory control of service parts in the
final phase: A central depot and repair kits. European Journal of Operational
Research 138, 76–86.
Van Kooten, J.P.J., Tan, T., 2009. The final order problem for repairable spare parts
under condemnation. Journal of the Operational Research Society 60 (10),
1449–1461.