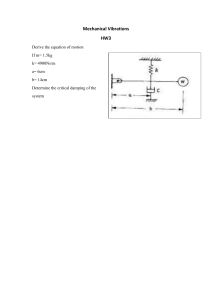
KKKM4413 Mechanical Vibrations Assoc. Prof. Dr. Sallehuddin M. Haris September 23, 2019 Free & Forced Vibration Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 2/8 Free & Forced Vibration Free Vibration Forced Vibration Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 2/8 Free & Forced Vibration Free Vibration No external force acts on the system. Forced Vibration Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 2/8 Free & Forced Vibration Free Vibration No external force acts on the system. Initial disturbance causes non-equilibrium condition. Forced Vibration Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 2/8 Free & Forced Vibration Free Vibration No external force acts on the system. Initial disturbance causes non-equilibrium condition. Motion occurs to return system to equilibrium. Forced Vibration Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 2/8 Free & Forced Vibration Free Vibration No external force acts on the system. Initial disturbance causes non-equilibrium condition. Motion occurs to return system to equilibrium. Forced Vibration System subjected to external force. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 2/8 Free & Forced Vibration Free Vibration No external force acts on the system. Initial disturbance causes non-equilibrium condition. Motion occurs to return system to equilibrium. Forced Vibration System subjected to external force. Initially, system may be at equilibrium or may be disturbed. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 2/8 Free & Forced Vibration Free Vibration No external force acts on the system. Initial disturbance causes non-equilibrium condition. Motion occurs to return system to equilibrium. Forced Vibration System subjected to external force. Initially, system may be at equilibrium or may be disturbed. Motion follows external force. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 2/8 Vibrating Systems Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 3/8 Vibrating Systems A dynamic system is a triple Σ = (T, W, B). Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 3/8 Vibrating Systems A dynamic system is a triple Σ = (T, W, B). The change in displacement (signal, W) of a vibrating system with time (T) follows some behaviour (B). Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 3/8 Vibrating Systems A dynamic system is a triple Σ = (T, W, B). The change in displacement (signal, W) of a vibrating system with time (T) follows some behaviour (B). A vibrating system is a dynamic system (Σ). Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 3/8 Vibrating Systems Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 4/8 Vibrating Systems In general, a mechanical dynamic system comprises of the following elementary elements: Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 4/8 Vibrating Systems In general, a mechanical dynamic system comprises of the following elementary elements: A potential energy storage Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 4/8 Vibrating Systems In general, a mechanical dynamic system comprises of the following elementary elements: A potential energy storage Spring or elasticity property. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 4/8 Vibrating Systems In general, a mechanical dynamic system comprises of the following elementary elements: A potential energy storage Spring or elasticity property. A kinetic energy storage Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 4/8 Vibrating Systems In general, a mechanical dynamic system comprises of the following elementary elements: A potential energy storage Spring or elasticity property. A kinetic energy storage Mass or inertia. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 4/8 Vibrating Systems In general, a mechanical dynamic system comprises of the following elementary elements: A potential energy storage Spring or elasticity property. A kinetic energy storage Mass or inertia. An energy dissipation element Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 4/8 Vibrating Systems In general, a mechanical dynamic system comprises of the following elementary elements: A potential energy storage Spring or elasticity property. A kinetic energy storage Mass or inertia. An energy dissipation element Damping property. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 4/8 Mathematical Modelling Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 5/8 Mathematical Modelling To represent all important features of the system as mathematical (analytical) equations governing the behaviour of the system. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 5/8 Spring Elements Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 6/8 Spring Elements A spring is a type of mechanical link, usually assumed to have negligible mass and damping. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 6/8 Spring Elements A spring is a type of mechanical link, usually assumed to have negligible mass and damping. Any elastic body can be modelled as an equivalent spring. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 6/8 Spring Elements A spring is a type of mechanical link, usually assumed to have negligible mass and damping. Any elastic body can be modelled as an equivalent spring. A linear spring obeys Hooke’s law, Fs = kxrel Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 6/8 Spring Elements A spring is a type of mechanical link, usually assumed to have negligible mass and damping. Any elastic body can be modelled as an equivalent spring. A linear spring obeys Hooke’s law, Fs = kxrel where k is the spring constant (or stiffness). Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 6/8 Spring Elements A spring is a type of mechanical link, usually assumed to have negligible mass and damping. Any elastic body can be modelled as an equivalent spring. A linear spring obeys Hooke’s law, Fs = kxrel where k is the spring constant (or stiffness). When a spring element is deformed, the work done (V ) is stored as a potential energy in the form of strain given by 1 V = kx2rel 2 Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 6/8 Mass or Inertia Elements Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 7/8 Mass or Inertia Elements The mass or inertia is usually assumed to be a rigid body. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 7/8 Mass or Inertia Elements The mass or inertia is usually assumed to be a rigid body. It gains or loses kinetic energy with changes in velocity. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 7/8 Mass or Inertia Elements The mass or inertia is usually assumed to be a rigid body. It gains or loses kinetic energy with changes in velocity. F = mẍ Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 7/8 Mass or Inertia Elements The mass or inertia is usually assumed to be a rigid body. It gains or loses kinetic energy with changes in velocity. F = mẍ Work done on the mass is stored as kinetic energy. 1 T = mẋ2 2 Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 7/8 Damping Elements Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 8/8 Damping Elements A damper is assumed to have no mass and no elasticity. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 8/8 Damping Elements A damper is assumed to have no mass and no elasticity. A damping force exists if there is relative velocity between the two ends of the damper. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 8/8 Damping Elements A damper is assumed to have no mass and no elasticity. A damping force exists if there is relative velocity between the two ends of the damper. It is difficult to determine the actual causes of damping in practical systems. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 8/8 Damping Elements A damper is assumed to have no mass and no elasticity. A damping force exists if there is relative velocity between the two ends of the damper. It is difficult to determine the actual causes of damping in practical systems. Damping is modelled as on of the following: Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 8/8 Damping Elements A damper is assumed to have no mass and no elasticity. A damping force exists if there is relative velocity between the two ends of the damper. It is difficult to determine the actual causes of damping in practical systems. Damping is modelled as on of the following: 1 Viscous Damping Fd = cẋrel , where c is the damping constant. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 8/8 Damping Elements A damper is assumed to have no mass and no elasticity. A damping force exists if there is relative velocity between the two ends of the damper. It is difficult to determine the actual causes of damping in practical systems. Damping is modelled as on of the following: 1 2 Viscous Damping Fd = cẋrel , where c is the damping constant. Coulomb (Dry-Friction) Damping Ff = µN , where µ is the coefficient of friction and N is the normal force. Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 8/8 Damping Elements A damper is assumed to have no mass and no elasticity. A damping force exists if there is relative velocity between the two ends of the damper. It is difficult to determine the actual causes of damping in practical systems. Damping is modelled as on of the following: 1 2 3 Viscous Damping Fd = cẋrel , where c is the damping constant. Coulomb (Dry-Friction) Damping Ff = µN , where µ is the coefficient of friction and N is the normal force. Hysteretic Damping Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 8/8 Damping Elements A damper is assumed to have no mass and no elasticity. A damping force exists if there is relative velocity between the two ends of the damper. It is difficult to determine the actual causes of damping in practical systems. Damping is modelled as on of the following: 1 2 3 Viscous Damping Fd = cẋrel , where c is the damping constant. Coulomb (Dry-Friction) Damping Ff = µN , where µ is the coefficient of friction and N is the normal force. Hysteretic Damping Work done is given by W =− Z x cẋdx 0 Assoc. Prof. Dr. Sallehuddin M. Haris KKKM4413 Mechanical Vibrations September 23, 2019 8/8