Engineering Applications of Computational Fluid
Mechanics
ISSN: (Print) (Online) Journal homepage: https://www.tandfonline.com/loi/tcfm20
Hydrodynamic study of sperm swimming near
a wall based on the immersed boundary-lattice
Boltzmann method
Qiong-Yao Liu, Xiao-Ying Tang, Duan-Duan Chen, Yuan-Qing Xu & Fang-Bao
Tian
To cite this article: Qiong-Yao Liu, Xiao-Ying Tang, Duan-Duan Chen, Yuan-Qing Xu & FangBao Tian (2020) Hydrodynamic study of sperm swimming near a wall based on the immersed
boundary-lattice Boltzmann method, Engineering Applications of Computational Fluid Mechanics,
14:1, 853-870, DOI: 10.1080/19942060.2020.1779134
To link to this article: https://doi.org/10.1080/19942060.2020.1779134
© 2020 The Author(s). Published by Informa
UK Limited, trading as Taylor & Francis
Group.
Published online: 22 Jun 2020.
Submit your article to this journal
Article views: 695
View related articles
View Crossmark data
Citing articles: 3 View citing articles
Full Terms & Conditions of access and use can be found at
https://www.tandfonline.com/action/journalInformation?journalCode=tcfm20
ENGINEERING APPLICATIONS OF COMPUTATIONAL FLUID MECHANICS
2020, VOL. 14, NO. 1, 853–870
https://doi.org/10.1080/19942060.2020.1779134
Hydrodynamic study of sperm swimming near a wall based on the immersed
boundary-lattice Boltzmann method
Qiong-Yao Liua , Xiao-Ying Tanga , Duan-Duan Chena , Yuan-Qing Xu
a
and Fang-Bao Tianb
a School of Life Science, Beijing Institute of Technology, Beijing, People’s Republic of China; b School of Engineering and Information
Technology, University of New South Wales, Canberra, Australia
ABSTRACT
ARTICLE HISTORY
This paper presents a numerical study on a sperm swimming in a viscous fluid by using an immersed
boundary-lattice Boltzmann method (IB-LBM). The sperm is modeled simply by integrating a slender tail and an elliptical head. By applying a tail traveling wave vertical to the wall, a sperm swims
near a surface is simulated. Based on which the corresponding swimming velocity, pressure, and
shear stress are analyzed, and the mechanisms of accumulation and acceleration in the swimming
process are further investigated. It is found when getting close to the wall, the integration of pressure gradient around the sperm increases, and then, the sperm is accelerated. On the other hand,
we also observed that the integration of pressure gradient toward the wall tends to raise; this means
a more considerable attraction from the wall occurs. These results provide us some new insights to
understand the phenomena of the sperm’s wall acceleration and wall accumulation. Moreover, the
variations of the pressure and shear stress indices on the sperm suggested that some perceptible
mechanical information based on the flow can be formed. Which reminded us that sperm might be
able to sense the flow and adjust its motion.
Received 29 December 2019
Accepted 21 May 2020
Nomenclature
s
t
x
y
AI
AII
B
b
c
cs
d
D
δ
ei
FI
F II
F
Fs
f
Fb
F dis
F dr
FP
node spacing of the moving boundary
time spacing
grid spacing in the x-axis
grid spacing in the y-axis
amplitude of M for F I
amplitude of X g,y for F II
weight function of the bending force for F I
amplitude of waveform
ratio of ω/κ
sound speed
distance parameter d
Dirac’s delta function
delta function
particle velocities
dynamic bending force I along the tail
dynamic bending force II along the tail
external force
stretching force
vector of the body force density
bending force
elastic force to control the distance to the wall
driving force
force density index from pressure
CONTACT Yuan-Qing Xu
F Ph
F Ph,x
F Ph,y
F Pt
F Pt,x
F Pt,y
F Sh
F Shh
F Sht
F Sht,x
r
gi
Gi
gi,b
eq
gi,b
eq
gi
gi,n
eq
gi,n
Ka
Kb
KbII
KEYWORDS
Swimming sperm;
hydrodynamic propulsion;
wall acceleration; immersed
boundary-lattice Boltzmann
method
force density index of the head
x component of F P
y component of F P
force density index of the tail
x component of F t
y component of F t
force density index from shear
F Sh of the head
F Sh of the tail
project of F Sht in the x-direction
tail (head) boundary
distribution function for the particles in LBM
body force term
distribution function for the particles at flow
boundary
equilibrium distribution function at flow
boundary
equilibrium distribution function in LBM
distribution function for particles of the grid
near flow boundary
equilibrium distribution function of the grid
near flow boundary
elastic coefficient to drive the wave motion
bending coefficient
bending coefficient for F II
bitxyq@bit.edu.cn
© 2020 The Author(s). Published by Informa UK Limited, trading as Taylor & Francis Group.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use,
distribution, and reproduction in any medium, provided the original work is properly cited.
854
Q.-Y. LIU ET AL.
κ
Ks
KsII
Ksd
L
Lc
Lh
Lr
Lt
μ
M
Mi
ω
ωi
P
/
P∗
P-i
Pij
P0∗
q
r
Re
ρ
s
T
t
τ
u
Ū
U0
Ua
Uij
Ux∗
υ
Vi_j
X0
X
x
Xg
X g,x
X g,y
X ij
X 0,y
Xw
Xx
Xy
wavenumber
extensional coefficient
extensional coefficient for F II
extensional coefficient of distance control in F I
sperm length
length of the flow domain
boundary length of the sperm head
Lr is the length of the boundary r
boundary length of the sperm tail
kinetic viscosity
bending moment on the tail
swimming mode
angular frequency
weight of the i-th direction
pressure
pressure in LBM
flow pattern, i = s,c,f,
pressure at a position, j = a,b
pressure of quiescent flow in LBM
transverse stress
scaling number
Reynolds number
density
distance along moving boundary
beating period
time
non-dimensional relaxation time
flow velocity
average swimming velocity
reference swimming velocity
average transport velocity of the wave motion
velocity at a position, j = a,b
swimming velocity in LBM
kinematic viscosity
vortex center (i = I,II; j = 1,2,3)
presetting position of X in the next time step
position of moving boundary
position of waveform
virtual waving boundary of X
x component of X g
y component of X g
adjacent points of X i , j = a,b
y component of X 0
position of wall boundary
x component of X
y component of X
1. Instruction
In order to meet with the egg, human sperm must swim
a long way in the right direction. In this process, the
sperm tail plays a decisive role in its targeted motion.
Although people have revealed a certain number of mysteries of the natural movement of human sperm, there is
still some significant mechanism remains unclear up to
now(Bukatina et al., 2015). For example, it is necessary to
further study the movement control strategy of the sperm
to help to develop the sperm-like robot (Xu, MedinaSanchez, et al., 2018). Moreover, due to the progress of
reproductive medicine in recent years, the behaviors of
the sperm related to signal perception and navigation
have also attracted considerable attention(Jikeli et al.,
2015; Li et al., 2014). For the motion study of sperm, we
summarized three aspects as the following.
The first is the movement study of the sperm. In the
microstructure of the sperm tail, there is a ‘9 + 2’ microtubule structure, the wave motion of the tail is caused by
the relative sliding of the dynein arms on these microtubules(Elgeti et al., 2015). Moreover, it is also found that
different interaction patterns of dynein arms can lead to
different tail motions (Chen & Zhong, 2015). Besides, the
biochemical modulation mechanism of the tail motion is
also an attractive topic. It was found that the concentration change of Ca2+ inside the tail could result in different
swing amplitude and frequency, and the concentration
of progesterone in the ambient fluid is a major factor to
affect the Ca2+ distribution(Darszon et al., 2006). Therefore, these studies indicated that the sperm movement
mainly related to its tail microstructure and biochemical
modulation mechanism.
The second is the fluid-structure interaction study of
sperm swimming. Back in 1951, Taylor first investigated
the self-propulsion of a two-dimensional sheet in a viscous fluid, formulated the migration velocity of sheet and
propagation velocity of wave(Taylor, 1951). Then Gray
and Hancock (Gray & Hancock, 1955) explained how
bending waves propagated along a flagellum can push
a spermatozoon through a viscous environment. Since
then, some more sophisticated theoretical and computational models have been proposed to study the fluidstructure interaction of sperm swimming or the locomotion of sperm-like microorganisms. To study the motor
behavior of the sperm, the resistive force theory(Fauci
& Dillon, 2006; Friedrich et al., 2010), the regularized
Stokeslets method (Cortez et al., 2005; Smith et al.,
2009) and the immersed boundary(Qin et al., 2012) were
adopted to model the sperm swimming. In these studies,
it was reported that the wave propulsion near and parallel to a wall could obtain a higher forward speed (Katz,
1974; Lauga & Powers, 2009; Qin et al., 2012). Moreover,
Some recent researches exhibited that sperm tended to
accumulate at a finite distance near a wall (Smith et al.,
2009); and the sperm also can perform steady swimming by changing the head configuration or the waving
number of the tail (Ishimoto & Gaffney, 2015). These
ENGINEERING APPLICATIONS OF COMPUTATIONAL FLUID MECHANICS
results may help us to understand the causations of sperm
accumulation at a surface.
The third is the mechanism study on the navigation of
human sperm. People found that the capacitated sperm
was able to perform a targeted migration; this is called
sperm navigation. Up to now, three typical sperm navigation patterns had been reported for human sperms.
They are the chemotaxis, the thermotaxis, and the rheotaxis. The chemotaxis is that the sperm tends to migrate
along the gradient direction of chemokine concentration(Bohmer et al., 2005). The recent research of chemotaxis focused mainly on the pathway of chemical signals
in the sperm body(Teves et al., 2009) and the biochemical reaction mechanism(Lishko et al., 2011). The research
indicated that continuous rising of the progesterone concentration could activate the Ca2+ pathway inside the
sperm tail, and then resulted in an exciting movement
to the egg. The thermotaxis is that the sperm tends
to migrate from a low-temperature region to a hightemperature region. By studying the temperature difference between the two ends of the rabbit oviduct before
and at ovulation, people found that the temperature difference at ovulation was much larger than that before
ovulation. This result implies that a larger temperature
difference between the two ends of the oviduct may benefit the sperm migrating to the egg(Bahat et al., 2005). As
for human sperm, it was found that the thermotaxis could
occur in a wide temperature scope of 29-41°C (Boryshpolets et al., 2015). The rheotaxis is that the sperm can adjust
its motion by perceiving the flow direction in the ambient fluid (Bretherton & Lord Rothschild, 1961; Kantsler
et al., 2014). People found that the capacitated human
sperm tended to swim upstream against the current in the
low-speed flow, and tended to accumulate at the wall surface if the flow speed grows up to a large level(Ishimoto
& Gaffney, 2015). Moreover, in a finite scope of flow
speed, a countercurrent swimming sperm will change
its ongoing direction if the flow direction is converted,
it is considered as a passive physical process(Omori &
Ishikawa, 2016; Zhang et al., 2016). In recent years, the
motor mechanism in sperm navigation attracted increasing attention in the field of sperm motility. It is closely
related to the male reproductive health, and also involves
rich unknown mechanisms of the biochemical signal
conditioning, the structural dynamics, and the fluidstructure interaction. Therefore, the movement mechanism in sperm navigation has become a research spot of
great significance.
As summarized above, in the past few decades, great
progress had been made to understand sperm behaviors.
However, there are still some mysteries requiring further study. First, few studies discussed the pressure and
shear stress on the swimming sperm. Second, the wall
855
accumulation and wall acceleration are reported as the
typical behaviors of swimming sperm. However, the primary causations of these two phenomena seem to have
not been explored in detail. Third, we know the chemotaxis and the thermotaxis of the sperm are the two typical
active-control behaviors. Then, is there any possibility
that the sperm could sense the flow and behave actively
like some swimming animals?(Oteiza et al., 2017) If that
is the case, what information could be perceived by the
sperm? Which still needs an exact answer.
Flow-structure interaction (FSI) problems are generally challenging in the study of mechanics(Akbarian
et al., 2018; Ghalandari et al., 2019). As a promising FSI
framework, IB-LBM is relatively simple, fast, and easy for
parallel computing. In recent years, it has been widely
used to model the FSI problems of flexible objects in the
flow. However, there are few IB-LBM studies on sperm
motion. In this paper, we proposed a swimming sperm
model by employing the two-dimensional (2D) and the
three-dimensional (3D) IB-LBM (Xiong & Zhang, 2012;
Xu, Wang, et al., 2018). In this model, a planar waving tail
motion is generated respectively by two types of driving
forces, and the beating plane is set perpendicularly to the
wall. This case is different from some other models where
the beating plane is set parallel to the wall. For the 2D
case, the sperm is structured by a slim tail and an elliptical
head according to the dimension scale in experimental observation (Kantsler et al., 2014; Kirkman-Brown
& Smith, 2011). The tail and the head are interlocked
together with a set of shared nodes and springs. For the
3D case, the sperm is structured by a slender columnar
tail and an ellipsoidal head. The 3D case is much closer to
the actual physical model, however, which involves massive calculation if a large computational domain is used.
By comparing the results of wall acceleration and pressure distribution in the 2D and 3D cases, we believe that
the 2D model has similar hydrodynamic characters with
the 3D model. Thus, for our problem, it is feasible to use
the 2D model to study the hydrodynamics of the sperm
approximatively. In our model, the motion of the fluid is
solved by the lattice Boltzmann method (LBM). Moreover, the interaction between the sperm and the fluid
is handled by the IB-LBM mathematical framework. In
order to conduct a contrastive study, the beating tail is
generated respectively with two types of motivation patterns. Based on this, we simulated a sperm swimming
near a planar wall. By regulating the distance to the wall,
the swimming velocity, the pressure, and the shear stress
are analyzed comprehensively. From the above analysis,
we hope to achieve a further understand of the behaviors
of the sperm near a wall.
In general, four innovative points of our study can be
summarized as below. First, we employed a promising FSI
856
Q.-Y. LIU ET AL.
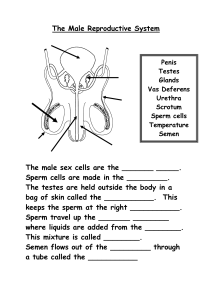
Figure 1. The diagrammatic sketch of the physical model.
framework of IB-LBM to model sperm swimming. Second, the beating plane is set perpendicularly to the wall
instead of parallel to the wall like some other models.
Third, we focused on the swimming speed, pressure, and
shear stress of the sperm, and proposed several quantitative indices to exhibit the wall accumulation and acceleration. Finally, we found there were some rules to follow
for the pressure, and shear stress on the sperm, this may
be useful to guide its swimming.
The rest of this paper is organized as the following.
The physical model definitions, the numerical description of the IB-LBM, and the structural mechanics are
described in Section 2. Section 3 gives the verification of
our numerical method. Section 4 discusses and analyzes
the propulsion mechanism of swimming sperm in different cases. The conclusions and limitations are given in
Section 5.
2. Physical model and numerical description
2.1. Physical model
To study the hydrodynamic mechanism of a swimming
sperm near a wall, we proposed a simplified model, as
shown in Figure 1. The sperm body is structured with
the node-spring model by the immersed boundary (Afra
et al., 2018; Huang et al., 2017), it is modeled with a slim
tail and an elliptical head according to the dimension
scale in experimental observation(Kantsler et al., 2014;
Kirkman-Brown & Smith, 2011). The tail and the head
are interlocked together with a group of virtual springs.
A traveling wave is applied on the tail to model its wave
motion. To simulate steady swimming along the wall, a
distance (d in Figure 1) is kept in the swimming process.
The size and boundary conditions of the computational domain are shown in Figure 1. In the LBM, the
D2Q9 model is used, where the grid spacing is x =
y = 1 (0.25μm). The size of the computational domain
is 1760x = 330y. In the sperm model, The node
spacing of the immersed boundary is s = 1(0.25 µm).
The body length of normal human sperm is about
55μm(Elgeti et al., 2015; Nosrati et al., 2015), (Ishimoto
& Gaffney, 2014). It is set as L = 220s in discrete form.
The length of the sperm head is set as 5μm, the width is 3
μm(Elgeti et al., 2015; Mai et al., 2002). The density and
the viscosity of the fluid are assumed to be the same as
water. The density of the sperm body is set as the same as
the fluid, which allows us to treat the sperm as massless
in the simulation.
1. The Reynold number Re in sperm swimming is generally in the order of 10−2 (Gillies et al., 2009; Ishimoto &
Gaffney, 2014), where the viscous forces dominate over
inertial forces. In the present study, Re = LŪ/υ varies
about in the range of 0.005–0.5 in the modeling, where
L is the length of the sperm, Ū is the average swimming
velocity (defined in Sec. 3.2), and υ is the kinematic viscosity. To nondimensionalize the problem, the reference
swimming velocity is U0 = 5 × 10−4 (7.5 μm/s) which
is chosen by the principle that in most cases, the average swimming velocity can be measured by r × U0 , (1 <
r < 10). The distance d (see Figure 1) varies in the range
of 0.2L to 0.75L with an interval of 0.05L. The period of
the beating motion is T = 6000t, and the total simulation time is 150T. By referencing the beat frequency of
human spermatozoa is around 10 Hz (Gillies et al., 2009),
we know here t ≈ 1.67 × 10−5 s.
2.2. Governing equations of the swimming sperm
In the modeling, the sperm is immersed in a viscous fluid.
Its beating tail can vn which the flow is governed by the
Navier-Stokes equations, it is (Zhu, 2008)
∂u
+ ρu · ∇u = −∇p + μ∇ 2 u + F and ∇ · u = 0,
∂t
(1)
where u is the velocity, μ is the kinetic viscosity of the
fluid, F is the external force from the sperm.
The sperm head and the tail are made up of a set of
nodes connected by springs in a consecutive way (Afra
et al., 2018; Huang et al., 2017; Salih et al., 2019; Xu et al.,
2014). Each node is governed by four force components,
i.e. the stretching force F s , the bending force F b , and the
external driving force F dr . The resultant force F is
ρ
F(s, t) = F s (s, t) − F b (s, t) + F dr (s, t).
(2)
The stretching force F s (s, t) follows Hooke’s law in the
tangential direction. It is used to maintain the original
head shape and the original tail length, and it is also used
to interlock the head and the tail. Which is calculated by
(Tian, 2014; Wei et al., 2014)
∂X(s, t) ∂
− 1 ∂X(s, t) , (3)
F s (s, t) =
Ks ∂s
∂s ∂s
ENGINEERING APPLICATIONS OF COMPUTATIONAL FLUID MECHANICS
where Ks is the extensional coefficient. For the tail, Ks =
4 × 10−11 N.m (Wei et al., 2014), and the original tail
length Lt = L = 220s (55μm). Similarly, for the head,
Ks_h = 4 × 10−11 N.m and the boundary length Lh =
60s. In addition, the elastic modulus ks_t,h is set to be
8 × 10−12 N.m to link the tail and the head together. The
above three settings of Ks_t , Ks_h and Ks_t,h can restrict
the stretching rate within the range of ±2% in simulation.
The bending force,F b (s, t) represents the bending
moment of the boundaries in the normal direction, which
is derived from the Frechet derivative of the bending
energy formula based on the virtual work principle (Zhu
& Peskin, 2002; Tian, 2014). Which is
F b (s, t) = Kb
∂ 4 X(s, t)
,
∂s4
(4)
where Kb is the bending coefficient. Similar to the
definition of Ks , Kb,t is set as 6 × 10−11 N.m(Wei et al.,
2014) for the tail and 3 × 10−12 N.m for the head boundary. Such settings can generate a set of suitable bending
rigidities for the sperm structure, which assists to simulate the sperm motion steadily. Besides, for the end nodes
of the tail, both the bending moment and transverse stress
vanish, this requires (Tian et al., 2013) (Tian et al., 2015)
∂ 2 X(s, t)
∂ 3 X(s, t)
=
0
and
= 0.
∂s2
∂s3
(5)
As to the external driving force F dr , it is defined in
detail by the next subsection.
2.3. Two simulation patterns to generate the tail
fluctuation
In the present model, two patterns of F dr are proposed
to model the tail fluctuation in a viscous fluid. The first
takes the tail as a flexible filament, in which a dynamic
bending force is set along it to make a traveling wave. In
this method, the motion morphology of the tail is jointly
decided by three main factors of the dynamic bending
force (the driving force F dr ), the bending rigidity of the
filament, and the flow around it. We marked this dynamic
bending force as F I . The second is to take the tail as a filament with fixed wave motion. The motion morphology
of the tail is only decided by its presetting motion rule,
which is similar to the movement setting of the ‘Taylor
sheet’. The corresponding force on the flow is marked as
F II .
It is necessary to set two types of F dr in parallel. On
the one hand, in the design, each type of driving force
has its advantages and disadvantages. For F I the advantage is that we can control the motion morphology of
the tail, and make it more like the experimental observation(Kantsler et al., 2014; Kirkman-Brown & Smith,
857
2011). And the disadvantage is that the motion morphology of the tail will change with the ambient flow; this
is not conducive to perform quantitative analysis of the
pressure or shear stress on the sperm. In contrast, For
F II , where the motion morphology of the tail will never
change with the flow, this is helpful to conduct the quantitative analysis. However, it just can simulate an ideal
and straightforward swimmer. On the other hand, we can
make a comparative study on the swimming speed, the
pressure and the shear stress on the sperm, etc. Under
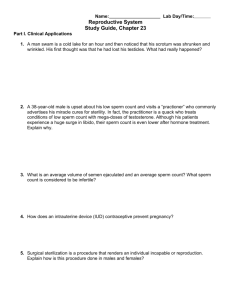
the two types of F dr , they can generate similar tail fluctuation as shown in Figure 2 (far enough away from
wall), so they should have similar output results. However, when approaching a wall, the motion morphology
will change under F I , then different output results will
appear, this is interesting to be explored.
The fluctuation of the tail in a viscous fluid can
produce propulsion on the sperm tail. According to
the undulatory propulsion mechanism(Taylor, 1951), the
fluctuating tail will get a transport velocity to swim forward. Therefore, the proposed swimming sperm model is
self-propelled. In addition, the sperm head is interlocked
with the tail, as a passive part, it is pushed by the tail when
swimming.
The following is the mathematical models of the two
driving forces for the tail fluctuation.
For F I , a time-dependent bending moment is used to
drive the beating tail, it is (Yin & Luo, 2010; Tian et al.,
2013)
F I (s, t) =
∂(q(s, t)n)
+ F dis (s, t),
∂s
(6)
Figure 2. Snapshots of the swimming sperm. The sperm is set to
swim in a large flow field, in which the influence of the wall can
be ignored. It is noted that both two patterns can generate similar
and stable tail fluctuation.
858
Q.-Y. LIU ET AL.
where F dis is used to keep an expected distance d to
the wall, it is exerted on the long axis of the head
(the extended part of the tail in the head), it’s xcomponent
is zero and y-component is expressed with
|X(s,t)−X w |
Ksd
− 1 , in which X w is the upper wall.
d
Ksd = 1 × 10−11 N.m is the elastic coefficient. It is large
enough to control the sperm to swim at a desired forward
is the unit normal vector. q(s, t) is
direction. In Eq. (7), n
the transverse stress, which is computed by(Tian et al.,
2016)
q(s, t) =
∂M(s, t)
,
∂s
(7)
then, we can get
∂(q(s, t)
n)
∂ 2 M(s, t)
∂M(s, t) ∂ n
+
=
,
n
2
∂s
∂s
∂s
∂s
M(s, t) = AI (s)sin −2π
t
s
+ KI π
T
Lt
.
s > 0.08Lt
(14)
In this way, we could control the tail motion in the ydirection. On the other hand, in the x-direction, the tail
will maintain its original length by following Hooke’s law.
This makes it capable of moving freely in the x-direction.
(9)
⎧
⎪
0
s ≤ 0.14Lt
⎪
⎪
⎪
⎨(s − 0.14L )/(0.36L ) 0.14L < s ≤ 0.5L
t
t
t
t
AI (s) =
.
⎪
1
0.5L
<
s
≤
0.64L
t
t
⎪
⎪
⎪
⎩(L − s)/(0.36L )
s > 0.64Lt
t
t
(10)
The settings of AI and its coefficients are based on the
modeling requirement to obtain a similar motion morphology in Ref. (Kantsler et al., 2014). Meanwhile, the
bending modulus along the tail needs to be weighted by
B(s), where
1
s ≤ 0.64Lt
.
(1.05Lt − s)/(0.41Lt ) s > 0.64Lt
0.075Lt
5 10
(1 − e(s−0.08Lt )/10 )
In the present study, the two-dimensional nine-speed
(D2Q9) LBM is used to solve the flow. The discrete lattice
Boltzmann equation is (Aidun & Clausen, 2010; Cheng &
Zhang, 2010; Shan et al., 2016)
In Eq. (10), T is the beating cycle of the tail. KI = 4.4 is set
to generate about a two-wave-number along the tail.AI is
the amplitude of M, it is
B(s) =
s ≤ 0.08Lt
0
2.4. Mathematical description of IB-LBM
.
AII (s) =
(8)
where the bending moment M is
where KsII and KbII are set respectively as the same as Ks
and Kb of the tail. The y-component of X g is defined as
t
s
X g,y (s, t) = AII (s)sin 2π + KII π
+ 0.75Lt − d,
T
Lt
(13)
where KII = 4.4. AII is the amplitude of X g,y , it is
expressed with an empirical formula as
(11)
Therefore, Eqn. (10) and (11) are formed by the design of
reasonable tail fluctuation in a viscous fluid. F II is generated by controlling the tail X to move synchronously with
a virtual waving boundary X g . X is set to follow with X g
through some virtual springs. It is defined as
4
⎧
∂ 4 X g,x (s,t)
∂ X x (s,t)
⎪
−
for x,
K
⎪
∂s4
∂s4
⎨ bII
F II (s, t) = KsII (X y (s, t) − X g,y (s, t))
4
⎪
⎪
∂ X y (s,t)
∂ 4 X g,y (s,t)
⎩ +K
−
for y,
bII
4
4
∂s
∂s
(12)
gi (x + ei t, t + t) − gi (x, t)
1
eq
= − [gi (x, t) − gi (x, t)] + tGi ,
τ
(15)
in which gi (x, t) is the distribution function for particles
of velocity ei at position x and moment t, t = 1 is the
eq
time step, gi is the equilibrium distribution function, τ
is the non-dimensional relaxation time. The nine particle
velocities ei are given by (Aidun & Clausen, 2010; Luo
et al., 2011)
⎧
0), i = 0
⎪
⎨(0,
ei = cos i−1
,
π , sin i−1
π x
, i = 1, 2, 3, 4
2
2
t √
⎪
i−4.5 ⎩ i−4.5 2x
cos 2 π , sin 2 π
t , i = 5, 6, 7, 8
(16)
where x = 1 is the lattice spacing. The settings of ei
enable a strategy to control the migratory directions of
the particle within a time-step. In Eq.(16), the body force
eq
term Gi and the equilibrium distribution function gi are
calculated by(Guo et al., 2002)
1
e i − u ei · u
ωi
Gi = 1 −
+ 4 ei · f ,
(17)
2τ
cs2
cs
and
eq
gi
ei · u uu : (ei ei − cs2 I)
= ωi ρ 1 + 2 +
,
cs
2cs4
(18)
where f is the vector of the body force density, and ωi
is the weight defined by ω0 = 4/9, ωi = 1/9 for i = 1–4
ENGINEERING APPLICATIONS OF COMPUTATIONAL FLUID MECHANICS
859
√
and ωi = 1/36 for i = 5–8. Cs = x/ 3t is the sound
speed. The relaxation time τ relates with the flow kinematic viscosity υ is in terms of (Guo et al., 2002)
υ
τ= 2
+ 0.5.
(19)
cs t
After getting gi , the fluid density ρ, the velocity u and the
pressure P can be computed from (Gan et al., 2015; Guo
et al., 2002)
ρ=
gi ,
(20)
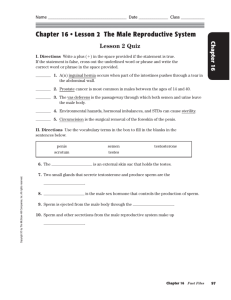
Figure 3. Flow field and the position of the waving sheet.
i
1
u=
ρ
ei gi + 0.5 f t
and the position is updated by
(21)
i
and
P=
ρcs2 .
(22)
i
The non-equilibrium extrapolation method is used to
obtain the particle distribution function on the boundaries, which is marked with gi,b , and calculated by(Guo
et al., 2002)
eq
eq
gi,b (x, t) = gi,b (x, t) + (gi,n (x, t) − gi,n (x, t)),
(23)
where gi,n represents the particle distribution function
eq
eq
of the neighboring grid, gi,b and gi,n are respectively the
equilibrium forms of gi,b and gi,n .
In the IB method, a Lagrangian force F is spread onto
the collocated grid points near the boundary by(Peskin,
2002; Sun & Bo, 2015)
f (x, t) = ∫ F(s, t)D(x − X)ds,
(24)
where D(x − X) is the Dirac’s delta function, it is(Peskin,
2002)
D(x − X) = δ(x − X)δ(y − Y),
(25)
in which δ(x − X) is (Peskin, 2002)
δ(x − X)
⎧
r 2
2|r|
4|r|
⎪
1
⎪
,
⎪
8x 3 − x + 1 + x − 4 x
⎪
⎪
⎪
⎪
⎪
⎪
< x
⎨
|r| = |x − X|
r 2
2|r|
12|r|
=
1
,
⎪
8x 5 − x + −7 + x − 4 x
⎪
⎪
⎪
⎪
⎪
x ≤ |r| = |x − X| < 2x
⎪
⎪
⎪
⎩
0, |r| = |x − X| ≥ 2x
.
(26)
∂X
= U(s, t).
∂t
(28)
3. Verification of the numerical model
3.1. Verify IB-LBM: the propulsion of a waving sheet
in a channel
In order to verify the accuracy of IB-LBM in the case of
low Reynolds number, the propulsion of an infinite waving sheet parallel to a channel wall is analyzed. Similar to
works of Refs (Fauci & Mcdonald, 1995) and (Qin et al.,
2012), the settings of the channel and the sheet are shown
in Figure 3. The length of the channel is Lc = 200x. The
sheet is placed at the centerline of the channel. It oscillates
with a constant amplitude, wavelength, and frequency of
motion. The left and the right boundaries of the channel and the sheet are set as periodic. The oscillating sheet
can drive the flow to travel itself in the channel. By adjusting the channel width, different traveling velocities of the
waving sheet can be obtained. The relationship between
the channel width and the traveling speed can be used to
verify the accuracy of the IB-LBM model.
As defined in Eq. (3) and Eq. (4), the mechanics of the
sheet is governed by a stretching force F s and a bending
force F b . Here, F b is given as
4
∂ X(s, t) ∂ 4 X 0 (s, t)
,
(29)
F b (s, t) = Kb
−
∂s4
∂s4
where X 0 is the presetting position of X in the next
time step. In this model, Kb = Eb_s /(ρU20 L3c ), in which
Eb_s = 4 is the bending modulus of the sheet. This can
generate a proper bending rigidity to make a stable wave
motion. The y-component of X 0 is(Fauci & Mcdonald,
1995) (Pak & Lauga, 2014)
Then the velocity U of the moving boundary X can be
updated by (Peskin, 2002; Sun & Bo, 2015; Zhu, 2008)
X 0,y = b sin(κx + ωt),
U(s, t) = ∫ u(x, t)D(x − X)dx,
where κ = 1 is the wavenumber, b is the wave amplitude,
and ω is the angular frequency. The sine wave travels
(27)
(30)
860
Q.-Y. LIU ET AL.
Figure 4. Effects of a wall on the swimming speed.
Figure 5. Swimming speed near a wall.
from left to right with a speed of c = ω/κ and a period of
T = 2π/ω.
The motive force F dr in the y (vertical) direction is
F dr (s, t) = Ka (X y − X 0,y ),
(31)
in which Ka = 1 × 10−11 N.m. Ks = 4 × 10−11 N. Such
a setting can ensure X to move synchronously with X 0 .
In addition, the ratio of the half-channel width to the
amplitude, h/b, is set from 2 to 10. The ratio of wavelength to amplitude is 50/3. The Reynolds number is
defined as(Fauci & Mcdonald, 1995)
Re =
ρω
ω
=
,
μκ 2
υκ 2
(32)
where the kinematic viscosity υ = 1/6.
The average normalized traveling velocity of the sheet
is Ua /c(Katz, 1974), in which Ua is the average value of
the sheet within one period. The results at Re = 0.02 are
displayed in Figure 4, which are found in good accordance with the results of Lubrication theory(Katz, 1974;
Pak & Lauga, 2014) and Ref. (Fauci & Mcdonald, 1995).
These results indicate that the present IB-LBM model
is efficient in modeling the waving propulsion in the low
Reynolds number case.
3.2. Comparison of 2D and 3D models
To understand the similarity and the difference between
the 2D and the 3D cases, we established a 3D sperm
model (see Appendix A), where the body length and the
wave motion of the sperm are set as the same to the 2D
case. The size of the flow field is redefined as 2L×1.35L
for the 2D case, and 2L×1.35L×0.15L for the 3D case.
The parameter d is set in the range of 0.2L to 0.7L with
an interval of 0.1L.
In this study, the swimming velocity and the pressure are picked up to estimate the similarities and differences of the 2D and 3D swimming sperm models. In
order to measure the average swimming velocity within a
period, a time-average swimming velocity Ūx,t is defined
as
1
10T
t+10T
∫ Ux,t dt. And
t
(Ūx,t0+T −Ūx,t0 )
Ūx,t0
× 100% < 1% is
set to be the termination condition to obtain a stable
Ūx,t0 , which is marked with Ūx . The results of Ūx in the
2D and 3D cases are displayed in Figure 5. It is found that
Ūx has the same increase trend when decreasing d. This
indicates that the 2D and 3D sperm models are essentially
similar in wall acceleration.
In addition, the pressure P around the swimming
sperm is carried out in Figure 6, in which d = 0.4L and
t = 13.33T. P is the dimensionless form calculated by
(P∗ − P0∗ )/(ρU02 ), in which P∗ is the pressure in LBM,
P0∗ is the corresponding pressure in a quiescent flow filed.
ρ is the fluid density. U0 is the reference velocity, it is
5 × 10−4 (7.5μm/s) in this paper.
By comparing Figure 6 (a) with (b), we know they
have similar pressure distribution. Therefore, it can be
concluded that in the 2D and 3D cases, the sperm has
a similar propulsive mechanism. That is, we can use the
2D model to study the hydrodynamics of the swimming
sperm approximatively.
4. Results, analysis, and discussion
4.1. Hydrodynamic analysis of the swimming sperm
In order to study the hydrodynamic mechanism of the
swimming sperm, in this section, a sperm swims at the
centerline of the channel is simulated. The motive forces
F I (marked with I) and F II (marked with II) are set
ENGINEERING APPLICATIONS OF COMPUTATIONAL FLUID MECHANICS
861
Figure 6. (a) Pressure map in the 2D case. (b) Pressure map in the 3D case.
definitions in Figure 8, it is
1 X ia − X ib
,
FP =
Pgi s
Lr
|X ia − X ib |
(33)
r
where r is the tail (head) boundary, Lr is the length
of r . As shown in Figure 8, X ia and X ib are the coordinates where the pressure is marked respectively with
Pia and Pib . Pgi is the pressure gradient on X i , it is
Pgi =
Pia − Pib
,
4s
(34)
in which Pij (j = a or b) is computed with the bilinear
interpolation method, there is
Figure 7. Variations of the swimming velocity.
Pij =
1
[(|Xij,2 − Xij |Pij,1 + |Xij,1 − Xij |Pij,2 )
(x)2
× |Yij,4 − Yij | + (|Xij,4 − Xij |Pij,3
(35)
+ |Xij,3 − Xij |Pij,4 )|Yij,1 − Yij |].
respectively to build the beating tail. Then, two parallel
results can be obtained to describe a swimming process.
The time frame for the analysis is chosen to be [120T,
130T], and the adjacent-averaging smooth method with
a filter window of [−T/6, T/6] is used to express the
original indices.
4.1.1. Swimming velocity
Set Ux∗ as the swimming velocity in LBM, then the nondimensional form is Ux = Ux∗ /U0 . The variations of Ux
are displayed in Figure 7. From these results, we know at
F I and F II the swimming velocities are both positive and
steady. Which reveals that the sperm can swim forward
steadily. As the difference, Ux under F II is a little larger.
4.1.2. Pressure around on the sperm
To study the pressure distribution around the sperm, a
force density index F P is introduced. According to the
To distinguish the index F P on the tail and the head, F Pt
and F Ph are used respectively, in which F Pt,x is set as the
x-component of F Pt . And F Ph,x F Pt,y and F Ph,y are defined
similarly as well. Moreover, set the interior pressure of
the head as a constant P0 , it is computed with Eq. (22)
by setting ρ = 1 in LBM.
At t= 50T, the maps of P are displayed in Figure
9. There are two aspects listed as below. First, the two
maps are similar in distribution. Second, the positive
directions of the pressure gradient around the tail both
exhibit a trend to push the sperm forward. Therefore, we
know that the two motive forces have similar propulsion
mechanism.
Figure 10 displays the streamline around the sperm.
It is found there are three vortexes in each case, and the
sperm tail goes through all of them. The vortex centers,
marked with VI_1 to VI_3 (VII_1 to VII_3 ), located on the
side of the sperm tail. Where the rotation of the vortex
indicates the forward transportation of the sperm.
862
Q.-Y. LIU ET AL.
Figure 8. The diagram to compute F P .
Figure 10. (a) Streamline resulted by F I . (b) Stream- line resulted
by F II .
Figure 9. (a) Pressure map resulted by F I . (b) Pressure map
resulted by F II .
The variations of F Pt and F Ph are shown in Figure 11
and Figure 12. Where Figure 11 (a) reveals that both F I
and F II can generate a positive propulsive force on the
tail, and F II makes the sperm swim faster. In Figure 11
(b), F Ph,x is negative in both two cases; this tends to hinder the forwarding of the sperm. Such a result is reasonable because the sperm head is passive in the swimming
process.
Figure 12 displays the y-component of F P , it is found
that at F I and F II , F Pt,y and F Ph,y perform the symmetric fluctuations around 0 level; this is because the sperm
is swimming at the centerline of the channel. The flow
Figure 11. (a) F Pt,x in the x-direction. (b) F Ph,x in the x-direction.
filed and the wall boundaries are the centerline symmetry. As a remarkable difference, the fluctuation range at
F II is much larger. The result indicates F I and F II can generate a similar F Pt,x to propel the sperm, meanwhile, they
also can result in quite different F Pt,y toward the wall.
4.1.3. Shear stress on the sperm
In the present study, the shear stress index is marked with
F Sh , it is defined in a similar way to F P . On the sperm tail,
F Sh is labeled as F Sht , and on the sperm head, it is labeled
as F Shh .
See Figure 13, Uia,x ,Uia,y ,Uib,x and Uib,y can be computed with their surrounding points by using the bilinear
ENGINEERING APPLICATIONS OF COMPUTATIONAL FLUID MECHANICS
Figure 12. (a) F Pt,y in the y-direction. (b) F Ph,y in the y-direction.
863
Figure 13. The diagram to compute the shear stress.
interpolation method. Where Uia is the summation of the
projections of Uia,x and Uia,y on the axis through X i−1
and X i+1 . Uij (j = a or b) is computed by
Uij = Uij,x
xi+1 − xi−1
yi+1 − yi−1
+ Uij,y
|X i+1 − X i−1 |
|X i+1 − X i−1 |
(36)
where xi+1 and yi+1 are the two coordinate components
of X i+1 . Then F Sh is defined as
Uia − Uib μ s
(37)
F Sh = CSh
ρU 2 L
4x
0 r
r
where CSh = 1 if the shear tends to generate a counterclockwise rotation. Accordingly, CSh = −1 denotes the
clockwise rotation effect. μ is the fluid viscosity and Lr
is the length of r .
The trends of F Sht and F Shh are displayed in Figure 14.
It is found that at F I and F II , the two results of F Sht are
very close, which are both the symmetrical waves around
0. This indicates that at the centerline of the channel, the
sperm has symmetrical and periodic shear stress on its
tail. The similar results of F Shh in Figure 14 (b) are also
observed.
4.2. Effects of wall and flow on the swimming sperm
As a further study, this section will discuss the hydrodynamic effects of the wall and flow on the swimming
sperm.
To study the effect of the wall, the distance d in Figure 1
is set varying from 0.2L to 0.75L with a step of 0.05L.
In this range, the wall acceleration(Qin et al., 2012) and
the wall accumulation(Smith et al., 2009) of a swimming
sperm can be observed. Besides, three patterns of flow,
Figure 14. (a) Shear stress index on the tail. (b) Shear stress index
on the head.
the static flow (P-s), the fair current (P-f) and the countercurrent (P–c) are set respectively to study the effects
of flow around the sperm. In P-f, the flow direction is
coincident with the swimming direction. In P–c, the flow
direction is set against the swimming direction. In order
to obtain the P-f and P–c patterns, an external force
f = f ∗ /(U2c /Lc ) is applied to the flow field. Where f is
10.56 for P-f and −10.56 for P–c. For the convenience
of description, we mark a swimming mode as {M1 , M2 },
where M1 represents the flow pattern while M2 represents the distance d. For instance, the swimming mode in
Section 4.1 is {P-s, 0.75L}. In addition, it is noted that
in the P-f pattern, the flow shear from the fair current
864
Q.-Y. LIU ET AL.
Figure 16. Trends of Ūx at F II .
Figure 15. Trends of Ūx at F I .
is not large enough to turn back the sperm’s swimming
direction to show the rheotaxis.
Based on the above settings, a numerical framework is
proposed to study the swimming sperm. Here we analyze
the swimming velocity, the pressure, and the shear stress
about the sperm. By conducting these studies, we hope
to explore the mechanisms of the wall acceleration and
accumulation, then try to seek some basis that the flow
near a wall may serve active navigation.
4.2.1. Time-average velocity in the three swimming
modes
The time-average swimming velocity is defined as Ūx =
1
10T
130T
∫ Ux dt. Ūx in the three swimming modes are dis-
120T
played in Figure 15 and Figure 16. It is found that in P-s
and P–c, Ūx goes up when decreasing d, this is known
as the wall acceleration of the swimming sperm (Nosrati
et al., 2015; Qin et al., 2012). By contrast, in P-f, when
decreasing d from 0.75L to 0.25L, Ūx goes down first
then rises. This is because the flow direction is coincident with the swimming direction, where the effect of
current-carrying is larger than that of the wall acceleration. According to the results, we know if the beating
plane is vertical to a planar wall, the undulate propulsion
near the wall can accelerate its swimming.
4.2.2. Pressure in the three swimming modes
In this subsection, the force density index F P is studied in the three swimming modes. The time-averaged
form of F Pt is defined as F̄ Pt =
the time-average F Ph is F̄ Ph =
1
10T
1
10T
130T
∫ F Pt dt. Similarly,
120T
130T
∫ F Ph dt. The trends
120T
Figure 17. Trends of F̄ Pt,x .
of F̄ Pt and F̄ Ph are shown in Figure 17–20, where F̄ Pt,x ,
F̄ Ph,x , F̄ Pt,y and F̄ Ph,y are the corresponding x- and ycomponents of F̄ Pt and F̄ Ph .
Firstly, From Figure 17–20, it is found at F II , the
changes in the flow direction just bring little effect on F̄ Pt
and F̄ Ph . This is interesting because we know the flow
shear near the wall is converse in P–c and P-f, and the
fluid resistance should be different; this may result in different pressure maps. However, according to our study,
the pressure distribution is very similar in P–c and Pf. We think these results are reasonable for two points.
The one is the change of the shear direction does not
necessarily mean the change of pressure because it is a
scalar quantity. The other is in P–c, if the sperm swims
at the same speed as that in P-f, a larger fluid resistance
will come into being. However, in this study, the swimming speed is a combined result of self-propelling and
ENGINEERING APPLICATIONS OF COMPUTATIONAL FLUID MECHANICS
Figure 18. Trends of F̄ Ph,x .
Figure 19. Trends of F̄ Pt,y .
current-carrying in P–c, where the swimming speed is
quite lower. So, it is possible that the pressure distribution becomes close in P–c and P-f. Compared with F II ,
we found F I generated different F̄ Pt and F̄ Ph in different
patterns. To explore the causation, we pick up the snapshots of the beating tail at d = 0.3L and t = 120T, which
are displayed in Figure 21. The results indicate that at F I ,
the beating tail exhibits an asymmetric swing. And the
profiles of the tail exhibit some difference in the three patterns. However, for F II , the beating tail is not influenced
by flow patterns. This reveals that at F I , the profile of the
beating tail will change in different patterns, which will
result in different pressure distribution.
Secondly, according to Figure 19 and 20, it is found
that F̄ Ph,y is quite different at F I and F II , where larger variations of F̄ Pt,y and F̄ Ph,y are observed at F II . Two aspects
can explain such differences as below. On the one hand,
865
Figure 20. Trends of F̄ Ph,y .
Figure 21. (a) Sperm tail resulted by F I . (b) Sperm tail resulted by
F II .
for the case of F I , the amplitude of tail fluctuation will
decrease if it locates close to the wall. By comparison, at
F II the amplitude of tail fluctuation is always invariant
wherever it locates. Therefore, when swimming near a
wall, a larger fluctuation amplitude towards the wall will
result in a larger variation of F̄ Pt,y and F̄ Ph,y . On the other
hand, at FI , a dynamic bending moment is exerted along
the tail, the direction of the corresponding bending force
on each node is variant with the time passing on, where
the force component vertical to the wall is relatively small.
While at FII , the driving force always points to the wall. In
which only a component of this force is practical to generate the tail fluctuation. In this case, the force vertical
to the wall is much larger. To summarize, the two above
reasons can lead to a massive difference in F̄ Pt,y and F̄ Ph,y
between the cases of F I and F II .
866
Q.-Y. LIU ET AL.
Figure 22. Trends of F̄ P,x .
Thirdly, see Figure 17, it is found that F̄ Pt,x has a
similar trend with Ūx in Figure 15 and Figure 16, and
a larger F̄ Pt,x corresponds to a larger Ūx . These results
imply a consistent association between F̄ Pt,x and swimming velocity. Therefore, we think F̄ Pt,x can be taken as a
dominant factor to drive the sperm to swim forward.
Fourthly, in Figure 18, both indices of F̄ Ph,x are negative; these results are resulted by the fact the sperm head is
a passive part, its forward-moving relies on the push from
the tail, so F̄ Ph,x is a drag force to the sperm swimming,
that is, F̄ Ph,x < 0. And, if a larger swimming velocity is
generated, a lower F̄ Ph,x , or a larger drag force is formed.
Finally, the total effect of F̄ Pt,x and F̄ Ph,x is expressed
by F̄ P,x = F̄ Pt,x + F̄ Ph,x Lh /Lt , where Lt and Lh are respectively the boundaries of the tail length and the head girth.
The variations of F̄ P,x are shown in Figure 22. It is found
that F̄ P,x and F̄ Pt,x have similar levels; this indicates that
the drag force from the head is limited for the propulsion
of the sperm.
4.2.3. Shear stress in the three swimming modes
In this subsection, the time-average forms F Sh are discussed in the three swimming modes. Here, we define
F̄ Sh =
1
10T
130T
∫ F Sh dt, and further define F̄ Sh,x to be the
120T
projection of F̄ Sh in the x-direction. The variations of
F̄ Sht,x and F̄ Shh,x are respectively displayed in Figure 23
and Figure 24. From Figure 24, it is found both the distance d and the flow pattern have impacts on F̄ Shh,x .
When decreasing d, the levels of F̄ Shh,x all increase monotonically. Moreover, at a specific d, the maximum level of
F̄ Shh,x arise in P-f, and the minimum level is found in P–c.
This means the shear stress on the sperm head has a regular association with parameter d and the flow direction
around it.
Figure 23. Trends of F̄ Sht,x .
Figure 24. Trends of F̄ Shh,x .
Compared with F̄ Shh,x , the variations of F̄ Sht,x are more
complicated. When decreasing d at F I , F̄ Sht,x decreases
first, then increases enormously. We think this is because
the beating tail profile changes distinctly as the sperm
getting close to the wall, where the tail performs an
asymmetric swing. This will lead to a large change in the
shear stress in the x-direction. By contrast, the trends of
F̄ Sht,x at F II appear regularly. When decreasing d, F̄ Sht,x
appears a positive increasing trend in P-f, and a negative
decreasing trend in P–c. Different from P-f and P–c, a
zero level is always kept in P-s.
From the above analysis, we can know that the shear
stress on the sperm, especially on the sperm head, has a
regular relationship with the distance to the wall and the
ambient flow direction. This may provide valuable information to the sperm to differentiate the surrounding flow
if the sperm can sense the shear stress.
ENGINEERING APPLICATIONS OF COMPUTATIONAL FLUID MECHANICS
4.3. Discussion on the hydrodynamics for the sperm
navigation
In Section 4.1, the swimming velocity, the pressure,
and the shear stress are analyzed quantitatively at {P-s,
d = 0.75L}. The results demonstrated that different types
of motive force could generate similar swimming motion
and propulsion. In Section 4.2, the corresponding timeaverage indices are further studied. In the modeling,
parameter d and three flow patterns are set respectively
to study the hydrodynamic mechanisms of the swimming sperm. Based on the above studies, the propulsion
mechanisms in the wall acceleration and accumulation
are explored numerically.
First, we introduced the time-average index of F̄ P to
measure the effect of pressure. According to Figure 22, we
know F̄ P,x keeps increasing when decreasing d. Because
there is a one-to-one correspondence between F̄ P,x and
d. So if the sperm can sense pressure difference, this correspondence can be used to estimate the distance to the
wall. On the other side, for the different flow patterns
under F II , we found there is little difference in F̄ P,x ; this
indicates that the pressure around the sperm body is not
sensitive to the flow direction.
Next, see F̄ Shh,x in Figure 24, both d and the flow patterns can generate different levels of shear stress; this
implies that the shear stress on the sperm head can provide identifiable information for apperceiving both the
distance to the wall and the flow direction. Therefore,
when swimming along the wall, the shear stress on the
sperm head can provide important information to identify the distance to a wall and the flow direction around
it.
Finally, sperm navigation is a complex process that
relates to signal perception, movement reaction, and
motor control. Up to now, people have found at least
three navigation modes for human sperm. In which the
chemotaxis and the thermotaxis are considered as the
autonomous behaviors, that is, the capacitated sperm can
sense the gradient variation of chemical substances or
temperature. They can further adjust itself to swim purposely at a particular direction; this indicates that the
sperm can perform active control in its swimming. Similarly, the rheotaxis was viewed as another type of sperm
navigation. However, this navigation mode is considered
in common as a passive process(Zhang et al., 2016). In
our study, we proved that when sperm is swimming near
a wall, the pressure index on the sperm can exhibit a regular change. Moreover, we also proved that the change
of flow direction could result in different shear stress
on the sperm body. These results imply that when the
sperm is swimming near a wall, the surrounding flow can
provide discernable information for it that how far it is
867
away from the wall and what the flow direction is around
itself. So, we think there is a possibility that the sperm
can perceive the hydrodynamic information and react. To
confirm this, it deserves further study.
5. Conclusion remarks
In this paper, the IB-LBM is used to model a human
sperm swimming along a planar wall. We investigated
the hydrodynamics of the sperm swimming near a wall,
and put forward a hypothesis that the sperm may swim
actively by sensing flow. Three primary conclusions are
summarized below. First, in a viscous fluid, a waving
plate or filament can lead to an uneven pressure distribution of the fluid, which can generate a local flow to
transport the moving boundary in a fixed direction. Second, the wall accumulation and wall acceleration are the
hydrodynamic phenomena resulted from the asymmetric
pressure difference on both sides of the sperm body. The
beating sperm tail near a wall can generate an asymmetric pressure distribution on both sides of the tail. Where
the pressure component vertical to the wall can lead to
the wall attraction, and then results in the wall accumulation. On the other hand, the other component parallel
to the wall can increase the swimming speed, and then
the wall acceleration is observed. Third, when sperm is
swimming near a wall, a different distance to the wall
can result in different pressure difference on both sides
of the sperm. Meanwhile, different flow direction around
the sperm can generate different shear stress on the sperm
head. According to these results, some discernable hydrodynamic information will be formed on the sperm. If
the sperm can perceive such information and react like
some known animals, an active sperm swimming based
on the hydrodynamic information may exist. Although
this is just a deduction, it is an idea of some newness about
sperm navigation.
On the other side, there are two main limitations to
this study. First, we know the actual sperm motion is a
3D case; our study is mainly based on a 2D model. In
the 2D sperm model, the slender tail is a plate. Although
we have shown the 3D and 2D cases have similar trends
in the pressure and wall acceleration, the corresponding
quantitative differences are non-negligible. Second, the
actual beating motion is not in a standard flat plane, even
a flat plane; its direction to the wall is not constant. Therefore, our study just focused on a specified pattern. As a
whole, we have conducted an IB-LBM study to discuss
wall accumulation and wall acceleration. We believe our
study is significant to explore the mechanism of sperm
behavior near a wall, as well as the motion control design
of sperm-like robots in an underwater case.
868
Q.-Y. LIU ET AL.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Funding
This work is supported by the National Natural Science Foundation of China (No.81771935 and No. 81741138). Dr. F.B. Tian is the recipient of an Australian Research Council
Discovery Early Career Researcher Award (project number
DE160101098).
ORCID
Yuan-Qing Xu
http://orcid.org/0000-0002-4482-893X
References
Afra, B., Nazari, M., Kayhani, M. H., Delouei, A. A., &
Ahmadi, G. (2018). An immersed boundary-lattice Boltzmann method combined with a robust lattice spring model
for solving flow–structure interaction problems. Applied
Mathematical Modelling, 55, 502–521. https://doi.org/
10.1016/j.apm.2017.10.014
Aidun, C. K., & Clausen, J. R. (2010). Lattice-Boltzmann
Method for complex Flows. Annual Review of Fluid Mechanics, 42(1), 439–472. https://doi.org/10.1146/annurev-fluid121108-145519
Akbarian, E., Najafi, B., Jafari, M., Faizollahzadeh Ardabili, S.,
Shamshirband, S., & Chau, K.-W. (2018). Experimental and
computational fluid dynamics-based numerical simulation
of using natural gas in a dual-fueled diesel engine. Engineering Applications of Computational Fluid Mechanics, 12(1),
517–534. https://doi.org/10.1080/19942060.2018.1472670
Bahat, A., Eisenbach, M., & Tur-Kaspa, I. (2005). Periovulatory increase in temperature difference within the
rabbit oviduct. Human Reproduction, 20(8), 2118–2121.
https://doi.org/10.1093/humrep/dei006
Bohmer, M., Van, Q., Weyand, I., Hagen, V., Beyermann, M.,
Matsumoto, M., Hoshi, M., Hildebrand, E., & Kaupp, U. B.
(2005). Ca2+ spikes in the flagellum control chemotactic
behavior of sperm. The EMBO Journal, 24(15), 2741–2752.
https://doi.org/10.1038/sj.emboj.7600744
Boryshpolets, S., Perez-Cerezales, S., & Eisenbach, M. (2015).
Behavioral mechanism of human sperm in thermotaxis:
A role for hyperactivation. Human Reproduction, 30(4),
884–892. https://doi.org/10.1093/humrep/dev002
Bretherton, F. P., & Lord Rothschild, F. R. S. (1961). Rheotaxis of Spermatozoa. Proceedings of The Royal Society of
London Series B, Biological Sciences, 153(953), 490–502.
https://doi.org/10.1098/rspb.1961.0014
Bukatina, A., Kukhtevichb, I., Stoopd, N., Dunkeld, J., &
Kantslere, V. (2015). Bimodal rheotactic behavior reflects
flagellar beat asymmetry in human sperm cells. Proceedings
of the National Academy of Sciences, 112(52), 15904–15909.
https://doi.org/10.1073/pnas.1515159112
Chen, D., & Zhong, Y. (2015). A computational model of dynein
activation patterns that can explain nodal cilia rotation. Biophysical Journal, 109(1), 35–48. https://doi.org/10.1016/j.bpj.
2015.05.027
Cheng, Y., & Zhang, H. (2010). Immersed boundary method
and lattice Boltzmann method coupled FSI simulation of
mitral leaflet flow. Computers & Fluids, 39(5), 871–881.
https://doi.org/10.1016/j.compfluid.2010.01.003
Cortez, R., Fauci, L., & Medovikov, A. (2005). The method
of regularized Stokeslets in three dimensions: Analysis,
validation, and application to helical swimming. Physics of
Fluids, 17(3), 031504. https://doi.org/10.1063/1.1830486
Darszon, A., Lopez-Martinez, P., Acevedo, J. J., HernandezCruz, A., & Trevino, C. L. (2006). T-type Ca2+ channels in sperm function. Cell Calcium, 40(2), 241–252.
https://doi.org/10.1016/j.ceca.2006.04.028
Elgeti, J., Winkler, R. G., & Gompper, G. (2015). Physics
of microswimmers–single particle motion and collective
behavior: A review. Reports on Progress in Physics, 78(5),
056601. https://doi.org/10.1088/0034-4885/78/5/056601
Fauci, L. J., & Dillon, R. (2006). Biofluidmechanics of reproduction. Annual Review of Fluid Mechanics, 38(1), 371–394.
https://doi.org/10.1146/annurev.fluid.37.061903.175725
Fauci, L. J., & Mcdonald, A. (1995). Sperm motility in the precence of boundaries. Bulletin of Mathematical Biology, 57(5),
679–699. https://doi.org/10.1016/S0092-8240(05)80768-2
Friedrich, B. M., Riedel-Kruse, I. H., Howard, J., & Julicher,
F. (2010). High-precision tracking of sperm swimming
fine structure provides strong test of resistive force theory. Journal of Experimental Biology, 213(Pt 8), 1226–1234.
https://doi.org/10.1242/jeb.039800
Gan, Y., Xu, A., Zhang, G., & Succi, S. (2015). Discrete
Boltzmann modeling of multiphase flows: Hydrodynamic
and thermodynamic non-equilibrium effects. Soft Matter,
11(26), 5336–5345. https://doi.org/10.1039/C5SM01125F
Ghalandari, M., Bornassi, S., Shamshirband, S., Mosavi, A.,
& Chau, K. W. (2019). Investigation of submerged structures’ flexibility on sloshing frequency using a boundary element method and finite element analysis. Engineering Applications of Computational Fluid Mechanics, 13(1), 519–528.
https://doi.org/10.1080/19942060.2019.1619197
Gillies, E. A., Cannon, R. M., Green, R. B., & Pacey, A. A. (2009).
Hydrodynamic propulsion of human sperm. Journal of Fluid
Mechanics, 625, 445–474. https://doi.org/10.1017/S00221
12008005685
Gray, J., & Hancock, G. J. (1955). The propulsion of sea-urchin
spermatozoa.
Guo, Z. L., Zheng, C. G., & Shi, B. C. (2002). Discrete lattice
effects on the forcing term in the lattice Boltzmann method.
Physical Review. E, Statistical, Nonlinear, and Soft Matter
Physics, 65, 046308. https://doi.org/10.1103/PhysRevE.65.
046308.
Huang, H., Wei, H., & Lu, X.-Y. (2017). Coupling performance of tandem flexible inverted flags in a uniform flow. Journal of Fluid Mechanics, 837, 461–476.
https://doi.org/10.1017/jfm.2017.875
Ishimoto, K., & Gaffney, E. A. (2014). A study of spermatozoan
swimming stability near a surface. Journal of Theoretical
Biology, 360, 187–199. https://doi.org/10.1016/j.jtbi.2014.
06.034
Ishimoto, K., & Gaffney, E. A. (2015). Fluid flow and sperm
guidance: A simulation study of hydrodynamic sperm rheotaxis. Journal of The Royal Society Interface, 12, 20150172.
https://doi.org/10.1098/rsif.2015.0172.
Jikeli, J. F., Alvarez, L., Friedrich, B. M., Wilson, L. G., Pascal, R., Colin, R., Pichlo, M., Rennhack, A., Brenker, C., &
Kaupp, U. B. (2015). Sperm navigation along helical paths in
3D chemoattractant landscapes. Nature Communications, 6,
7985. https://doi.org/10.1038/ncomms8985.
ENGINEERING APPLICATIONS OF COMPUTATIONAL FLUID MECHANICS
Kantsler, V., Dunkel, J., Blayney, M., & Goldstein, R. E. (2014).
Rheotaxis facilitates upstream navigation of mammalian
sperm cells. Elife, 3, e02403. https://doi.org/10.7554/eLife.
02403.
Katz, D. F. (1974). On the propulsion of micro-organisms near
solid boundaries. Journal of Fluid Mechanics, 64(1), 33–49.
https://doi.org/10.1017/S0022112074001984
Kirkman-Brown, J. C., & Smith, D. J. (2011). Sperm motility: Is
viscosity fundamental to progress? Molecular Human Reproduction, 17(8), 539–544. https://doi.org/10.1093/molehr/
gar043
Lauga, E., & Powers, T. R. (2009). The hydrodynamics of swimming microorganisms. Reports on Progress in Physics, 72,
096601. https://doi.org/10.1088/0034-4885/72/9/096601.
Li, L. F., Xiang, C., Zhu, Y. B., & Qin, K. R. (2014). Modeling of progesterone-induced intracellular calcium signaling
in human spermatozoa. Journal of Theoretical Biology, 351,
58–66. https://doi.org/10.1016/j.jtbi.2014.02.026
Lishko, P. V., Botchkina, I. L., & Kirichok, Y. (2011). Progesterone activates the principal Ca2+ channel of human
sperm. Nature, 471(7338), 387–391. https://doi.org/10.1038/
nature09767
Luo, L. S., Liao, W., Chen, X., Peng, Y., & Zhang, W. (2011).
Numerics of the lattice Boltzmann method: Effects of collision models on the lattice Boltzmann simulations. Physical
Review E, 83(5), 056710. https://doi.org/10.1103/PhysRevE.
83.056710.
Mai, A., Weerachatyanukul, W., Tomietto, M., Wayner, D. D.,
Wells, G., Balhorn, R., Leader, A., Cyr, J. L., & Tanphaichitr,
N. (2002). Use of atomic force microscopy for morphological and morphometric analyses of acrosome intact and
acrosome-reacted human sperm. Molecular Reproduction
and Development, 63(4), 471–479. https://doi.org/10.1002/
mrd.10195
Nosrati, R., Driouchi, A., Yip, C. M., & Sinton, D. (2015).
Two-dimensional slither swimming of sperm within a
micrometre of a surface. Nature Communications, 6, 8703.
https://doi.org/10.1038/ncomms9703.
Omori, T., & Ishikawa, T. (2016). Upward swimming of a
sperm cell in shear flow. Physical Review E, 93, 032402.
https://doi.org/10.1103/PhysRevE.93.032402.
Oteiza, P., Odstrcil, I., Lauder, G., Portugues, R., & Engert,
F. (2017). A novel mechanism for mechanosensory-based
rheotaxis in larval zebrafish. Nature, 547(7664), 445–448.
https://doi.org/10.1038/nature23014
Pak, O. S., & Lauga, E. (2014). “Theoretical models in lowreynolds-number locomotion” in fluid-structure interactions in low-reynolds-number Flows. Royal Society of Chemistry.
Peskin, C. S. (2002). The immersed boundary method. Acta
Numerica, 11, 479–517. https://doi.org/10.1017/S09624929
02000077
Qin, F.-H., Huang, W.-X., & Sung, H. J. (2012). Simulation
of small swimmer motions driven by tail/flagellum beating.
Computers & Fluids, 55, 109–117. https://doi.org/10.1016/
j.compfluid.2011.11.006
Salih, S. Q., Aldlemy, M. S., Rasani, M. R., Ariffin, A. K.,
Ya, T. M. Y. S. T., Al-Ansari, N., Yaseen, Z. M., & Chau,
K.-W. (2019). Thin and sharp edges bodies-fluid interaction simulation using cut-cell immersed boundary method.
Engineering Applications of Computational Fluid Mechanics,
13(1), 860–877. https://doi.org/10.1080/19942060.2019.
1652209
869
Shan, M. L., Zhun, C. P., Zhou, X., Yin, C., & Han, Q. B. (2016).
Investigation of cavitation bubble collapse near rigid boundary by lattice Boltzmann method. Journal of Hydrodynamics, 28(3), 442–450. https://doi.org/10.1016/S1001-6058(16)
60647-9
Smith, D. J., Gaffney, E. A., Blake, J. R., & Kirkman-Brown,
J. C. (2009). Human sperm accumulation near surfaces: A
simulation study. Journal of Fluid Mechanics, 621, 289–320.
https://doi.org/10.1017/S0022112008004953
Sun, D. K., & Bo, Z. (2015). Numerical simulation of hydrodynamic focusing of particles in straight channel flows with
the immersed boundary-lattice Boltzmann method. International Journal of Heat and Mass Transfer, 80, 139–149.
https://doi.org/10.1016/j.ijheatmasstransfer.2014.08.070
Taylor, G. (1951). Analysis of the swimming of microscopic
organisms. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 209(1099), 447–461.
https://www.jstor.org/stable/98828.
Teves, M. E., Guidobaldi, H. A., Unates, D. R., Sanchez, R.,
Miska, W., Publicover, S. J., Morales Garcia, A. A., & Giojalas, L. C. (2009). Molecular mechanism for human sperm
chemotaxis mediated by progesterone. PLoS One, 4, e8211.
https://doi.org/10.1371/journal.pone.0008211.
Tian, F. B. (2014). FSI modeling with the DSD/SST method
for the fluid and finite difference method for the structure.
Computational Mechanics, 54(2), 581–589. https://doi.org/
10.1007/s00466-014-1007-3
Tian, F. B., Luo, H., Song, J., & Lu, X.-Y. (2013). Force production and asymmetric deformation of a flexible flapping
wing in forward flight. Journal of Fluids and Structures,
36, 149–161. https://doi.org/10.1016/j.jfluidstructs.2012.07.
006
Tian, F. B., Wang, Y., Young, J., & Lai, J. C. S. (2015). An FSI solution technique based on the DSD/SST method and its applications. Mathematical Models and Methods in Applied Sciences, 25(12), 2257–2285. https://doi.org/10.1142/S021820
2515400084
Tian, F. B., Young, J., & Lai, J. C. S. (2016). An immersed
boundary-lattice Boltzmann method for swimming sperms.
The 20th Australasian Fluid Mechanics Conference Perth,;
December 05-08; Western Australia.
Wei, Q., Xu, Y. Q., Tian, F. B., Gao, T. X., Tang, X. Y., & Zu, W.
H. (2014). IB-LBM simulation on blood cell sorting with a
micro-fence structure. Bio-medical Materials and Engineering, 24(1), 475–481. https://doi.org/10.3233/BME-130833.
Xiong, W., & Zhang, J. (2012). Two-dimensional lattice Boltzmann study of red blood cell motion through microvascular bifurcation: Cell deformability and suspending viscosity
effects. Biomechanics and Modeling in Mechanobiology, 11(34), 575–583. https://doi.org/10.1007/s10237-011-0334-y
Xu, H., Medina-Sanchez, M., Magdanz, V., Schwarz, L.,
Hebenstreit, F., & Schmidt, O. G. (2018). Sperm-Hybrid
Micromotor for Targeted Drug Delivery. ACS Nano, 12(1),
327–337. https://doi.org/10.1021/acsnano.7b06398
Xu, Y. Q., Tang, X. Y., Tian, F. B., Hua, P. Y., Yong, X.,
& Jun, Z. Y. (2014). IB-LBM simulation of the haemocyte dynamics in a stenotic capillary. Computer Methods in
Biomechanics and Biomedical Engineering, 17(9), 978–985.
https://doi.org/10.1080/10255842.2012.729581
Xu, Y. Q., Wang, M. Y., Liu, Q. Y., Tang, X. Y., & Tian, F. B.
(2018). External force-induced focus pattern of a flexible filament in a viscous fluid. Applied Mathematical Modelling, 53,
369–383. https://doi.org/10.1016/j.apm.2017.09.001
870
Q.-Y. LIU ET AL.
Yin, B., & Luo, H. (2010). Effect of wing inertia on hovering performance of flexible flapping wings. Physics of Fluids, 22(11),
111902. https://doi.org/10.1063/1.3499739
You, J. B., Wang, Y., McCallum, C., Tarlan, F., Hannam, T.,
Lagunov, A., Jarvi, K., & Sinton, D. (2019). Live sperm trap
microarray for high throughput imaging and analysis. Lab
on a Chip, 19(5), 815–824. https://doi.org/10.1039/C8LC0
1204K
Zhang, Z., Liu, J., Meriano, J., Ru, C., Xie, S., Luo, J., & Sun,
Y. (2016). Human sperm rheotaxis: A passive physical process. Scientific Reports, 6(1), 23553. https://doi.org/10.1038/
srep23553
Zhu, L. (2008). Scaling laws for drag of a compliant body in an
incompressible viscous flow. Journal of Fluid Mechanics, 607,
387–400. https://doi.org/10.1017/S0022112008002103.
Zhu, L., & Peskin, C. S. (2002). Simulation of a flapping flexible
filament in a flowing soap film by the immersed boundary
method. Journal of Computational Physics, 179(2), 452–468.
https://doi.org/10.1006/jcph.2002.7066
Appendix A
The configuration of the 3D swimming sperm model is shown
in Figure 25.
The 3D sperm is made up of a slender columnar tail and
an ellipsoidal head. The two parts are interlocked by a group
of virtual springs. For the tail, it is structured by a closed shell
and a central axis. The length is set as the same as the 2D case.
The maximum radius of the tail as 0.375μm. The shell and the
central axis are also connected by a set of virtual springs. A
cross-section of the tail is exhibited in Figure 25 (left), where
there are 12 nodes used to structure each grid layer. The motion
of the tail is controlled by the central axis, and the shell is
driven by a central axis through the virtual springs. By this
means, a beating tail that is similar to the 2D case can be
obtained.
The mechanics of the nodes on the shell consists of two types
of force, i.e. the stretching force F s and the bending force F b .
The diagrammatic sketch of the connections of the shell nodes
is shown in Figure 26.
In Figure 26 (a), take node n1 as the example, in the x-y
plane, one node is connected with its neighboring eight nodes
by a set of virtual springs (dash lines). The stretching force
F s (Eq. (3)) of these springs works to control the inextensibility of the shell, where the extensional coefficient Ks_t = 9.6 ×
10−12 N.m. Such a setting can restrict the stretching rate to be
less than 2%. In the x- and y-direction, the bending forceF b is
applied to express the bending rigidity of the shell. In the xdirection which is in accord with the central axis of the tail,
the bending coefficient Kb_t is 1.0 × 10−11 N.m. And in the ydirection, Kb_t is 1.33 × 10−12 N.m. This setting can generate
a suitable bending rigidity for the shell. See Figure 26 (b), nc
is the node on the central axis. In the y-z plane, n1 and nc
are in the same grid layer. For the virtual spring between n1
and nc , Ks_t = 1.6 × 10−12 N.m. For the central axis, Ks_t =
9.6 × 10−12 N.m and Kb_t = 1.2 × 10−10 N.m, where the driving force is expressed by Eq. (6).
As to the sperm head, the length and the width are set as
the same as the 2D case. The thickness of the sperm head is set
as 1.5μm(You et al., 2019). Then the ratio of the length, width,
and thickness of the sperm head is 10:6:3. The grid is exhibited in Figure 26, it is set in a similar way with the tail shell, as
well as the parameter settings for F s and F b . To maintain the
ellipsoid shape, all nodes on the head are connected with a virtual node on its centroid, where Ks_t = 1.6 × 10−12 N.m for the
corresponding virtual springs.
In the end, to integrate the tail and the head, we picked up 60
nodes of the tail shell nearest to the head’s centroid and linked
each of them with all nodes on the head. For the corresponding
virtual spring, there is Ks_t = 1.6 × 10−12 N.m. This can make
the tail and the head to be a whole body.
The shell has two closed ends, which are formulated
by
⎧
R × cos(iθ)(1 − e−0.2(Lt −s) )(1 − e−0.2(s) )
⎪
⎪
⎪
⎨
y − component
X(s, θ) =
⎪R × sin(iθ)(1 − e−0.2(Lt −s) )(1 − e−0.2(s) )
⎪
⎪
⎩
z − component
,
(A1)
in which R/Lt = 6.82 × 10−3 , θ = π/6, i = 1, 2 . . . 12, 0 ≤
s ≤ Lt
Figure 25. The architecture of the 3D sperm.
Figure 26. (a) Connection of the shell nodes in the x-y plane. (b)
Connection of the shell nodes and the central axis node in the y-z
plane.