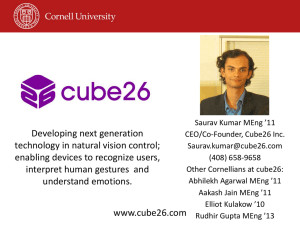
PRINCIPLES OF COMMUNICATIONS Prepared By: MEng. Samah A. Massadeh Communication Systems Block Diagram (Analog or Digital) MEng. Samah A. Massadeh 2 Source: Originates a message (e.g., human voice, TV picture, email message) and converts it to an electrical waveform, referred to as a message signal. Transmitter (Modulator): Modifies the message signal for efficient transmission. Channel: A physical medium of choice that can convey the electrical signals at the transmitter output over a distance. MEng. Samah A. Massadeh 3 Receiver (Demodulator): Processes the signal received from the channel by reversing the signal modifications made at the transmitter and removing the distortion made by the channel. Sink: Converts the electrical signal at the output of the receiver to its original form – the message. MEng. Samah A. Massadeh 4 Transmission Modes There are three modes of transmission simplex, half duplex, and full duplex. Transmission mode describes the direction, of flow of signal between two connected devices. Transmission Modes Simplex MEng. Samah A. Massadeh Half Duplex Full Duplex 5 The main difference between simplex, half duplex, and full duplex is that in a simplex mode of transmission the communication is unidirectional whereas, in the halfduplex mode of transmission the communication is two directional but the channel is alternately used by the both the connected device. MEng. Samah A. Massadeh 6 Definition of Simplex In a simplex transmission mode, the communication between sender and receiver occur only in one direction. That means only the sender can transmit the data, and receiver can only receive the data. The receiver can not reply in reverse to the sender. Simplex is like a one-way road in which the traffic travels only in one direction, no vehicle from opposite direction is allowed to enter. The entire channel capacity is only utilized by the sender. You can better understand the simplex transmission mode with an example of keyboard and monitor. The Keyboard can only transmit the input to the monitor, and the monitor can only receive the input and display it on the screen. The monitor can not transmit any information back to the keyboard. MEng. Samah A. Massadeh 7 Definition of Half Duplex In a half-duplex transmission mode, the communication between sender and receiver occurs in both the directions but, one at a time. The sender and receiver both can transmit and receive the information but, only one is allowed to transmit at a time. Half duplex is still a one way road, in which a vehicle traveling in opposite direction of the traffic has to wait till the road is empty. The entire channel capacity is utilized by the transmitter, transmitting at that particular time. Half duplex can be understood with an example of walkie-talkies. As the speaker at both the end of walkie-talkies can speak but they have to speak one by one. Both can not speak simultaneously. MEng. Samah A. Massadeh 8 Definition of Full Duplex In a full duplex transmission mode, the communication between sender and receiver can occur simultaneously. Sender and receiver both can transmit and receive simultaneously at the same time. The full duplex transmission mode is like a two way road in which traffic can flow in both the direction at the same time. The entire capacity of the channel is shared by both the transmitted signal traveling in opposite direction. Sharing of the channel capacity can be achieved in two different ways. First, either you physically separate the link in two parts one for sending and other for receiving. Second, or you let the capacity of a channel to be shared by the two signals traveling in opposite direction. Full duplex can be understood best, with an example of a telephone. When two people communicate over a telephone both are free to speak and listen at the same time. MEng. Samah A. Massadeh 9 Key Differences Between Simplex, Half Duplex and Full Duplex In a Simplex mode of transmission, the signal can be sent only in one direction; hence, it is unidirectional. On the other hand, in half duplex, both the sender and receiver can transmit the signal but, only one at a time, whereas, in full duplex, the sender and receiver can transmit the signal simultaneously at the same time. In a simplex mode of transmission, only one of the two devices on the link can transmit the signal, and the other can only receive but can not send back the signal in reverse. In a half duplex mode, both the devices connected on the link can transmit the signal but only one device can transmit at a time. In a full-duplex mode, both the device on the link can transmit simultaneously. MEng. Samah A. Massadeh 10 The performance of full duplex is better than half duplex and simplex because it better utilizes the bandwidth, as compared to half duplex and simplex. If we take the example of keyboard and monitor, it is observed that keyboard inputs the command and monitor displays it, monitor never reply back to the keyboard; hence, it is an example of the simplex transmission mode. In a walkie-talkie, only one person can communicate at a time so; it represents an example of half duplex mode of transmission. In a telephone, both the person on the either side of a telephone can communicate parallelly at the same time; hence, it represents an example of a full-duplex mode of transmission. MEng. Samah A. Massadeh 11 BASIS FOR COMPARISON SIMPLEX Direction of Communication Communication is unidirectional. HALF DUPLEX FULL DUPLEX Communication is twodirectional but, one at a time. Communication is two directional and done simultaneously. Send/Receive A sender can send data but, A sender can send as well as A sender can send as well as can not receive. receive the data but one at receive the data a time. simultaneously. Performance The half duplex and full duplex yields better performance than the Simplex. The full duplex mode yields Full duplex has better higher performance than performance as it doubles half duplex. the utilization of bandwidth. MEng. Samah A. Massadeh Example Keyboard and monitor. Walkie-Talkies. 12 Telephone. Signals and Systems Review MEng. Samah A. Massadeh 13 Signals-Basics A signal is a function which represents a physical quantity A function of one, two or more variables For example, Temperature Your Depends upon Rainfall during the year voice signals is a function of time and frequency. 14 Signals-Basics Various types of signals in communications Electrical Voltages Acoustic signals and currents signals Sound Video signals Intensity level of a pixel (camera, video) over time But, for enabling an electronic communication system, we convert all signals into electrical signals Using various kinds of transducers 15 Signals-Basics Information signal 1 0.8 0.6 Consider a signal x(t , f , ) A sin( 2 f t ) Amplitude 0.4 0.2 0 -0.2 -0.4 -0.6 -0.8 -1 0 2 4 6 Time Amplitude Frequency Phase So all information is represented by one or more of these parameters 16 8 10 Some key terms Amplitude Measure of the strength of the signal Frequency Number of oscillations per second Hertz Bandwidth Range Our of frequencies occupied by a signal voice signal occupies the frequencies between 300-3400 Hz 17 Signals-Basics A microphone converts the voice signal from mechanical signal into an electrical signal Similarly, a digital camera converts a picture into digital images Sensors 18 Analogue and Digital Signals Analogue signals Continuous in time and continuous in amplitude Most signals in the real world are continuous time x(t ) t 19 Analogue and Digital Signals Digital signals Discrete in time and usually discrete in terms of amplitude too Some real world signals are discrete, computer signals are always discrete x[n] n 20 Analog, Digital, Continuous-Time, Discrete-Time? MEng. Samah A. Massadeh 21 In signal classification, the adjectives “analog” and “digital” refer to the amplitude property of the signals, while “continuous-time” and “discrete-time” refer to the time property. MEng. Samah A. Massadeh 22 System-Basics “Systems” process input signals to produce output signals Manipulate signals Example, An MP3 player is a system because it converts data (MP3 song) into audio signals A communication system 23 Sine and Cosine signal 10 Start signals from “0” sin(2πf 6 4 Amplitude (volts) Sinusoidal 8 2 0 -2 -4 x 0) = 0, @t=0 -6 -8 -10 0 2 4 6 Time (seconds) 8 10 0 2 4 6 Time (seconds) 8 10 10 8 6 Start (cosine) signals from “1” cos(2πf x 0) = 1, @t=0 Amplitude (volts) Cosinusoidal 4 2 0 -2 -4 -6 -8 -10 24 Some important terms Wavelength Crest 10 8 6 Time Period Amplitude (volts) 4 2 0 -2 -4 Trough -6 -8 -10 0 2 4 6 Time (seconds) 8 10 25 Some important terms Crest Indicates Trough Indicates largest value of a signal smallest value of a signal Time period Time taken by the signal to complete one cycle Measured in seconds Frequency Number of cycles completed by the signal in one second Measured in Hertz 26 Some important terms Wavelength Distance (spatial i.e. in meters) between two successive crests or troughs Distance travelled by a signal in one cycle 10 Wavelength 8 6 4 Amplitude (volts) 2 0 -2 -4 -6 27 -8 -10 0 2 4 6 Time (seconds) 8 10 Some important terms 1 frequency( Hz ) time period ( s) velocity(m / s) wavelength (m) frequency(Hz) wavelength (m) velocity(m / s) time period (s) For wireless communication, velocity is taken as 3x108 m/s For wireline communication (electrical), velocity is taken as 2x108 m/s 28 Find the amplitude, freq & phase of the following signals x(t , f , ) A sin( 2 f t ) Amplitude a(t ) sin( 4t ) Frequency Phase b(t ) 7.5 sin(6t 3) 29 Noise Noise It is a random signal (no particular shape or pattern) is an undesirable signal Because it corrupts information! Noise usually enters the communication system via the communicating medium But it could be locally generated as well. 30 Time-domain & frequency-domain plots Most signals of our interest are dependent on time and frequency At the same time x(t , f , ) A sin( 2 f t ) Therefore, we have two different kinds of plots Time-domain plots Give information about the time dependent properties Frequency-domain Give plots information about the frequency dependent properties 31 Example-1 Frequency-domain plot 1 0.8 0.9 0.6 0.8 0.4 0.7 I Complete cycle in 1 sec 0.2 Magntude Amplitude (volts) Time-domain plot 1 0 -0.2 0.6 0.5 0.4 -0.4 0.3 -0.6 0.2 -0.8 0.1 -1 0 0.1 0.2 0.3 0.4 0.5 0.6 Time (seconds) 0.7 0.8 0.9 1 0 0 1 2 3 4 5 6 Frequency (Hertz) 7 x(t ) sin( 2 1 t ) sin( 2t ) 32 8 9 10 Example-2 Frequency-domain plot 1 0.8 0.9 0.6 0.8 0.4 0.7 I Complete cycle in 0.5 sec 0.2 0 -0.2 Magntude Amplitude (volts) Time-domain plot 1 0.6 0.5 0.4 -0.4 0.3 -0.6 0.2 -0.8 0.1 -1 0 0.1 0.2 0.3 0.4 0.5 0.6 Time (seconds) 0.7 0.8 0.9 1 0 0 1 2 3 4 5 6 Frequency (Hertz) 7 x(t ) sin( 2 2 t ) sin( 4t ) 33 8 9 10 Example-3 Frequency-domain plot 1 0.8 0.9 0.6 0.8 0.4 0.7 0.2 0.6 Magntude Amplitude (volts) Time-domain plot 1 0 -0.2 0.5 0.4 -0.4 0.3 -0.6 0.2 -0.8 0.1 -1 0 0.1 0.2 0.3 0.4 0.5 0.6 Time (seconds) 0.7 0.8 0.9 1 0 0 1 2 3 4 5 6 Frequency (Hertz) 7 x(t ) sin( 2 4 t ) sin(8t ) 34 8 9 10 Example-4 Frequency-domain plot 1 0.8 0.9 0.6 0.8 0.4 0.7 0.2 0.6 Magntude Amplitude (volts) Time-domain plot 1 0 -0.2 0.5 0.4 -0.4 0.3 -0.6 0.2 -0.8 0.1 -1 0 0.1 0.2 0.3 0.4 0.5 0.6 Time (seconds) 0.7 0.8 0.9 1 0 0 1 2 3 4 5 6 Frequency (Hertz) 7 x(t ) sin( 2 9 t ) sin(18t ) 35 8 9 10 Signals and Spectra Electrical communication signals are time-varying quantities such as voltage or current. Although a signal physically exists in the time domain, we can also represent it in the frequency domain where we view the signal as consisting of sinusoidal components at various frequencies. 36 Signals and Spectra This frequency-domain description is called the spectrum. 37 Spectrum & Bandwidth Spectrum range of frequencies contained in signal Bandwidth width of spectrum 38 Spectrum & Bandwidth • • Range of Frequencies? Bandwidth? Bandwidth (BW)=(6000-1000)=5000Hz=5KHz 39 Bandwidth: Bandwidth (BW) of a system h(t) is defined as the interval of positive frequencies over which the magnitude |H(f)| remains within a given numerical factor. Bandwidth of a signal x(t) is defined as the interval of positive frequencies over which the magnitude |X(f)| remains within a given numerical factor. MEng. Samah A. Massadeh 40 Spectrum of Pure Sine wave Power Line Frequency 41 MEng. Samah A. Massadeh 42 MEng. Samah A. Massadeh 43 MEng. Samah A. Massadeh 44 Ideal Frequency Selective Filter MEng. Samah A. Massadeh 45 What is an Electric Filter? An electric filter is usually a frequencyselective network that passes a specified band of frequencies and blocks or attenuates signals of frequencies outside this band. MEng. Samah A. Massadeh 46 Ideal Low-pass Filter (LPF) A filter that provides a constant output from dc up to a cut-off frequency fc and then passes no signal above that frequency is called an ideal low-pass filter. The ideal response of a low-pass filter 1, 𝑓 < 𝑓𝑐 𝐻 𝑓 =ቊ 0, 𝑓 > 𝑓𝑐 MEng. Samah A. Massadeh 47 Note that: The voltage gain (the ration of output voltage and input voltage i.e. (Vout/Vin) is constant over a frequency range from zero to cut off frequency fc . The output of any signal having a frequency exceeding fc will be attenuated i.e there will be no output voltage for frequencies exceeding cut-off frequency . The output will be available faithfully from 0 to fc with constant gain, and is 0 from fc onward. The frequencies between 0 and fc are, therefore, called the passband frequencies, while the range of frequencies, those beyond fc , that are attenuated include the stopband frequencies. The bandwidth (BW) is, therefore fc . MEng. Samah A. Massadeh 48 Ideal High Pass Filter (HPF) A filter that provides or passes signals above a cut-off frequency fc is a high-pass filter 0, 𝑓 < 𝑓𝑐 𝐻 𝑓 =ቊ 1, 𝑓 > 𝑓𝑐 MEng. Samah A. Massadeh 49 frequency fc , called the cut-off frequency, and above this frequency, the gain is constant. Thus signal of any frequency beyond fc is reproduced with a constant gain, and frequencies from 0 to fc will be attenuated. In the optical domain, high-pass and low-pass have the opposite meanings, with a "high-pass" filter (more commonly "long-pass") passing only longer wavelengths (lower frequencies), and vice versa for "low-pass" (more commonly "short-pass"). MEng. Samah A. Massadeh 50 Ideal Band-Pass Filter (BPF) When the filter circuit passes signals that are above one cutoff frequency and below a second cut-off frequency, it is called a band-pass filter. Thus a band-pass filter has a passband between two cut-off frequencies fc2 and fc1 ,where fc2 >fc1 and two stopbands:0<f<fc1 and f>fc2 are lower and higher cut-off frequencies respectively. MEng. Samah A. Massadeh 51 1, 𝑓𝑐1 < 𝑓 < 𝑓𝑐2 𝐻 𝑓 =ቊ 0, 𝑜𝑡ℎ𝑒𝑟 𝑤𝑖𝑠𝑒 MEng. Samah A. Massadeh 52 Ideal Band-Stop Filter (BSF) The band-stop or band-reject filter performs exactly opposite to the band-pass i.e. it has a bandstop between two cut-off frequencies fc1 and fc2 and two passbands : 0<f<fc1 and f>fc2. 0, 𝑓𝑐1 < 𝑓 < 𝑓𝑐2 𝐻 𝑓 =ቊ 1, 𝑜𝑡ℎ𝑒𝑟 𝑤𝑖𝑠𝑒 MEng. Samah A. Massadeh 53 Real Frequency Selective Filter MEng. Samah A. Massadeh 54 Low-pass Filter (LPF) MEng. Samah A. Massadeh 55 High Pass Filter (HPF) MEng. Samah A. Massadeh 56 Band-Pass Filter (BPF) MEng. Samah A. Massadeh 57 Band-Stop Filter (BSF) MEng. Samah A. Massadeh 58