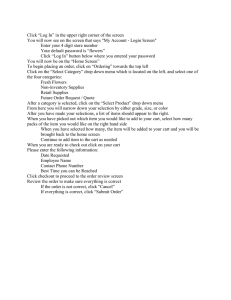
ENME403: State-space design for a 3-cart controller Introduction: The MDOF spring-mass-damper system can be used to model many different, complex real-world systems such as robotic motion control. Your goal is to design a full-state feedback controller for the linear 3-cart system, so that cart 3 can track 250mm and 500mm steps inputs as fast and accurately as possible. Additional weights may be present on carts 2 and 3, and there are three possible springs that may be used. Thus, there are 12 possible system configurations overall (different cart masses and spring constants) and your controller must be robust enough to handle any of the spring/mass configurations. The overall system is shown schematically in Figure 1. c3 c1 c2 motor Cart 3 m3 k23 Cart 2 m2 k12 Cart 1 m1 u1 Figure 1: Schematic of the 3-cart spring/mass/damper system. The motor is mounted on cart 1 and provides force u1 in response to a voltage input. Feedback control design is required to control the position of cart 3. The Gory details: Design requirements Period, T This lab is a test of controller design for fast rise and settling times, and positional accuracy. During the lab, repeated step commands will come in the form of a pulse train of fixed period T. The commanded step size of any given pulse will be either 250mm or 500mm (±125mm or ±250mm about zero position). An example is shown in Figure 2. Figure 2: Reference input position commands (square wave) and cart locations. The aim is to move cart 3 back and forth as quickly as possible. Along with the controller gains you must also specify the period T for this pulse train. The period should be long enough that cart 3 can settle to within 10mm (or about 5% of the largest step) of the commanded position before the next step occurs – closer is better. The faster the period you can successfully track to within the specified tolerance, the better your lab mark will be. You need to derive the state-space equations for the system and design feedback control to track the input position commands for each of the 12 possible system configurations. Select 3 controllers that are robust enough to control all the possible system configurations with the best performance and bring these to the lab. During the course of the lab, your group will be randomly assigned one of the spring/mass configurations, and your 3 controllers will be tested on it using a pulse train with both 250mm and 500mm step sizes using your specified period T. Goal: A robust design (you don’t know where the masses will be) that meets the 10mm or 5% design requirement for the pulse train. Goal 2: Meet these requirements for as fast a pulse train as possible – if you are better than your friends than you are a provably better person! (or not!). Thus, you need to bring 3 controller sets to the lab. Each controller set consists of: i. ii. iii. A set of closed-loop gains, K = [k1, k2, k3, k4, k5, k6] a. Use the state vector x in the following format: x= (ie: k1 = gain for cart 1 position, k2 = gain for cart 2 position, ...) The reference tracking gain, N The pulse train period, T (in seconds) Controller hardware requirements: There are two hardware limitations placed on your controller: i. ii. The commanded motor voltage cannot exceed ±12V. This is a hardware limitation and commanding a voltage greater than this will result in voltage saturation. The commanded motor voltage is slew-rate limited to a maximum of ±30V/s. If your controller commands changes in voltage faster than 30V/s the motor driver will not be able to keep up. HINT: The physical plant parameters may not exactly match those of the modelled system. Make sure your controllers are not too sensitive to small changes in parameter values. Some useful MATLAB commands for control design and analysis include: ss, place, lqr, step, lsim System model parameters: i. Cart masses: Cart 1 has a fixed mass (including the motor), while additional 500g masses may be loaded onto cart 2, cart 3, or both (a robustness test!): Cart 1: m1 = 1.608kg Cart 2: m2a = 0.75kg (unloaded), m2b = 1.25kg (with mass) Cart 3: m3a = 0.75kg (unloaded), m3b = 1.25kg (with mass) ii. Spring constants: There are three possible springs that may be used. Both springs in the cart system will be of the same stiffness (ie: k12 = k23). The spring constants are: ka = 175 N/m kb = 400 N/m kc = 800 N/m iii. Damping and motor input: The remaining system parameters required for modelling are: Cart 1 damping: c1 = 0 [Ns/m] Cart 2 damping: c2 = 3.68 [Ns/m] Cart 3 damping: c3 = 3.68 [Ns/m] Where: α = 12.45 (experimentally derived fiddle factor) km = 0.00176 (motor back emf constant) kg = 3.71 (gear ratio) R = 1.4Ω (resistance of the motor armature) r = 0.0184m (radius of the pinion) V = applied voltage (HINT: Don’t forget to move the velocity dependent term in u1 to your damping matrix, as was already done with the pendulum lab)